
円形基板の光学的測定方法およびその装置
【課題】 対象物の形状によらず、ライン照明とラインセンサの構成の光学的測定装置を用いて高速かつ高精度に、測定対象物のエッジ周辺部付近まで測定する方法および装置を提供する。
【解決手段】 支持部材により支持された測定対象物の表面に、ライン照明光を照射し、測定対象物の表面からの散乱光あるいは反射光あるいは透過光を結像光学系を介して受光部に結像させて、測定対象物の状態を測定する場合、測定対象物のエッジ周辺部にあたったライン照明光による散乱光あるいは反射光あるいは透過光が受光部に入らないようにしたことを特徴とする。
【解決手段】 支持部材により支持された測定対象物の表面に、ライン照明光を照射し、測定対象物の表面からの散乱光あるいは反射光あるいは透過光を結像光学系を介して受光部に結像させて、測定対象物の状態を測定する場合、測定対象物のエッジ周辺部にあたったライン照明光による散乱光あるいは反射光あるいは透過光が受光部に入らないようにしたことを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、半導体ウェーハ、MEMS、HDD、CCD、CMOSまたはカバーガラス用の円形基板などに用いられる部材の表面状態を測定する、光学的測定方法及びその装置に関する。
【背景技術】
【0002】
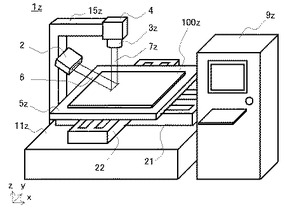
半導体ウエハーや液晶パネルの製造工程では、成膜や回路パターンの不良の原因となる異物の付着や表面状態の不良の有無を監視するために、光学測定による測定が行われている。図9は、従来のライン照明とラインセンサを用いた光学的測定装置を示す斜視図である。従来の光学的測定装置1zでは、角形基板100zに代表される測定対象部材の表面状態を測定するために、角形基板100zの斜め上方に照明手段2を配置し、照明手段2から、角形基板100zに向けてライン状の照射光6zを照射させる。そうすると、角形基板100zの表面では表面散乱光7zが発生する。
【0003】
この表面散乱光7zは、角形基板100zの上方に配置した結像手段であるレンズ3zを介して集光され、その後、受光手段であるラインセンサ4zに結像される。表面散乱光7zは、ラインセンサ4zで受光された後、ライン方向(図9において矢印Yの方向)の表面散乱光信号に変換し、データ処理手段(図示せず)を通して各種測定情報として取得される。
【0004】
角形基板100zは、テーブル5z上に載置されている。テーブル5zは、光学的測定装置1zの架台11zの上に取り付けられた、X軸移動機構21とY軸移動機構22の上に取り付けられており、XY方向に自在に自在に移動可能となっている。
【0005】
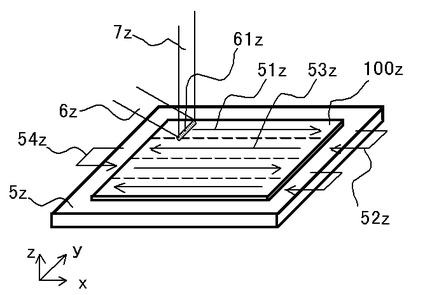
図10は、角形基板100z上をライン状の照射光6zでトレースする様子を示す斜視図である。Y方向に所定の長さを有するライン状の照明が、矢印51zに示す様に、X方向に相対移動される。角形基板100zを通過した後は、矢印52zに示す様に、場所を変えて折り返し、矢印53zに示す様に、X方向に相対移動される。その後、角形基板100zを通過した後は、矢印54zに示す様に、場所を変えて折り返す。その後、前述の動作を繰り返し、角形基板100zの全面に渡って、表面状態を測定することができる。
【0006】
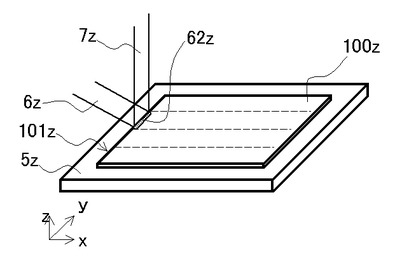
図11は、光学的測定装置1zにおいて、照射光6zが角形基板100zのエッジ部に照射されたときの様子を示す斜視図である。図11に示すようにエッジ101zに照射された光62zは、エッジ散乱と呼ばれる反射光を含む強い光となる。前記エッジ散乱は測定対象物100zの表面に照射された光61zからの散乱光と比べて数倍から数10倍以上も強い強度を持つ。
【0007】
このため、前記エッジ散乱をラインセンサ4が受光すると、測定対象物100zの表面散乱光とは大きく異なるラインセンサ信号を得たり、ラインセンサ信号が飽和したり、ラインセンサ信号に大きなノイズが発生してしまう(ラインセンサ4がラインCCDならば、このようなノイズはブルーミングやスミアと呼ばれる)。これらによって、エッジ101z付近の情報を正しくとることができないことになり、エッジ101z付近の測定を正確に実施することが困難となる。
【0008】
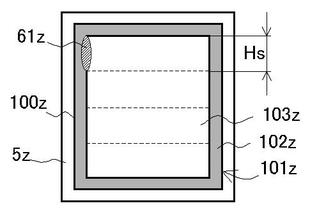
ここではエッジ101z付近の測定困難な領域をエッジ周辺部102zと呼び、図12に示すように測定対象物のエッジ101zから1〜2mm程度内側の部分を指す。
従って、図12に示すように、測定対象物の周辺部102zは測定領域から外し、有効観察エリア103z内の基板表面に照射された光61zのみを観察するのが一般的である。そうすることで、図12のように長方形の基板が測定対象の場合には、位置情報を基にラインセンサの測定開始位置と測定終了位置を正確に設定することで前記長方形基板はエッジ周辺部102zを除いて精密に測定することが可能である。また、照射された光61zは所定の光量があれば良く、それを満たせば、照射された光61zは長さHsを比較的長くして測定に用いることも可能である。そうすることで、所定時間当たりに測定できる面積を増やすことができる。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開2004−177284号
【特許文献2】特開平06−249791号
【発明の概要】
【発明が解決しようとする課題】
【0010】
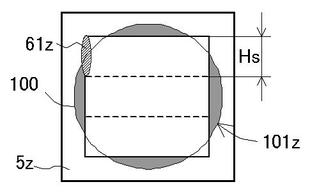
しかしながら、図13に示すような円形基板を測定の測定対象物とした、ライン照明とラインセンサを用いる光学的測定方法は、ほとんど実用化されていない。
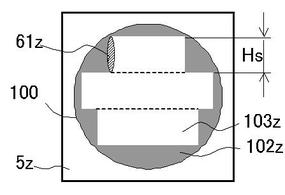
その理由としては次の2つの弊害があるためである。第1の理由としてライン照明とラインセンサを用いた光学的測定方法を円形基板に適用しようとすると、基板表面に照射された光61zが円形基板100のエッジに掛かりやすくなり、エッジ周辺部を避けて有効測定エリアを設定すると、図14に示すように有効測定エリア103zが小さくなってしまうからである。
【0011】
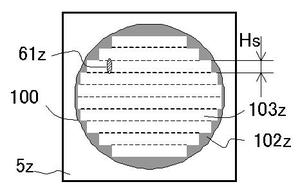
第2の理由として図15のようにスキャン長さHsを小さくすることで有効測定エリア103zを大きくとると、エッジ周辺部付近まで測定することは可能になるが、スキャン数が増えてしまいライン照明とラインセンサを用いた光学的測定方式の最大の長所である高速測定が損なわれてしまうからである。
【0012】
ライン照明とラインセンサによる他の構成には、図示しないエリア照明とエリアセンサの構成が考えられる。この構成では、主に高倍率で小さな領域を順次移動させながら測定する方法が実用化されており、エッジ周辺部を除く領域を測定することが可能になるが、現状の技術では測定速度は遅く、広い領域の測定には不向きである。
【0013】
さらに他の構成としては、図示しない基板を回転させながら、スポット照明を走査させ、センサ(フォトマルなど)で受光する構成がある。このような方式では測定位置の分解能が照明のスポットの大きさに依存するため、位置分解能が大きくなってしまうか、あるいはスポットを小さくして位置分解能を小さくすると、測定領域全域の測定速度が非常に遅くなってしまう。
本発明は、上記事情に鑑みてなされたものであって、その目的とするところは、測定対象物の形状によらず、ライン照明とラインセンサの構成の光学的測定装置を用いて高速かつ高精度に、前記測定対象物のエッジ周辺部付近まで測定する方法および装置を提供することにある。
【課題を解決するための手段】
【0014】
以上の課題を解決するために、請求項1に記載の発明は、
テーブル上に載置された測定対象部材の表面に向けて、所定の長さを有するライン状の照明光線を、前記測定部材の表面に対して所定の角度を保って照射し、
前記測定対象部材の表面で散乱した光の一部を結像光学系を介して受光部に結像させ、
前記テーブルと前記照射光線とを所定の方向に相対的に走査させ、
前記測定対象部材に照射する前記照明光線の照射位置を移動させて
前記測定対象部材の表面状態を測定する光学的測定方法に関して、
前記ライン状の照明光線は所定の長さを有しており、
前記測定対象部材に照射された前記照明光線のうち、
前記測定対象部材の周辺エッジ部に照射されて散乱した光を、
前記測定対象部材と前記結像光学系との間に配置した遮光物で選択的に遮光して、
前記測定対象部材の表面状態を測定することを特徴とする、光学的測定方法である。
【0015】
請求項2に記載の発明は、
測定対象部材を載置するテーブルと、
前記対象部材に向けて、所定の長さを有するライン状の照明光線を、前記測定部材の表面に対して所定の角度で照射する照明手段と、
前記測定対象部材の表面で反射又は散乱した光を受光する受光部と、
前記散乱光を前記受光部に結像させる結像光学系部と
を備える光学的測定装置において、
前記測定対象部材と前記結像光学系部との間に遮光物を配置し、
前記遮光物は、前記測定対象部材の周辺エッジ部で散乱した光を選択的に遮光でき、
前記測定対象部材の周辺部より内側の表面で散乱した光を結像光学系を介して受光部に結像できるように配置されている、
前記測定対象部材の表面状態を測定することを特徴とする、光学的測定装置である。
【0016】
請求項3に記載の発明は、
前記遮光物は開口部を有する遮光板であることを特徴とする、
請求項2の光学的測定装置である。
【0017】
この装置構成によれば、遮光板で覆われた部分だけが欠けた像を得ることができ、測定対象部材のエッジ部分からの散乱光の影響を受けないで、測定対象部材の表面状態を測定することができる。
【0018】
請求項4に記載の発明は、
前記遮光物を構成する部材の少なくとも一部が、測定対象部材の周辺エッジ部の形状と測定位置に対応して、前記ライン状の照明光線の長手方向に位置を変更できるように取り付けられていることを特徴とする、
請求項2の光学的測定装置である。
【0019】
この装置構成によれば、エッジ部で反射又は散乱した光の一部を遮光板にて遮り、測定対象部分からの光のみを選択的にラインセンサに結像させるので、任意の形状に対応して、測定対象部材の表面状態を測定することができる。
【0020】
請求項5に記載の発明は、
前記結像光学系はテレセントリック光学系とすることを特徴とする、
請求項2〜4の光学的測定装置である。
【0021】
この装置構成によれば、遮光板による光量不足の影響を受けず、測定対象部材の周辺部近傍まで、測定対象部材の表面状態を測定することができる。そのため、非テレセントリック光学系の結像光学系を用いた場合と比べて、測定可能領域を広くすることができる。
【発明の効果】
【0022】
本発明の光学的測定方法及びその装置は、測定対象物のエッジ周辺部が任意の形状であっても、エッジ周辺部による散乱光の影響を受けることなくライン照明とラインセンサを用いて、高速かつ高精度に、測定対象物の異物の有無や表面状態の測定ができる。
【図面の簡単な説明】
【0023】
【図1】本発明の実施形態の第1の例を示す斜視図である。
【図2】本発明の実施形態の第1の例を示す要部斜視図である。
【図3】本発明の実施形態の第1の例を示す正面図である。
【図4】本発明の実施形態の第2の例を示す要部斜視図である。
【図5】本発明の実施形態の第2のを示す平面図である。
【図6A】本発明の実施形態の第2の例を示す平面図である。
【図6B】本発明の実施形態の第2の例を示す平面図である。
【図6C】本発明の実施形態の第2の例を示す平面図である。
【図6D】本発明の実施形態の第2の例を示す平面図である。
【図7】非テレセントリックレンズを用いた光学的測定装置を示す概念図である。
【図8】テレセントリックレンズを用いた光学的測定装置を示す図である。
【図9】ライン照明とラインセンサを用いた光学的測定装置の原理図である。
【図10】測定対象物をXY方向に移動しながらスキャンしながら測定する原理図である。
【図11】照射光のエッジ散乱を示す図である。
【図12】エッジおよびエッジ周辺部を示す図である。
【図13】円形基板に対するライン照明とラインセンサを用いた光学的測定装置を示す図である。
【図14】円形基板に対するライン照明とラインセンサを用いた光学的測定装置を示す図である。
【図15】円形基板に対するライン照明とラインセンサを用いた光学的測定装置を示す図である。
【発明を実施するための形態】
【0024】
[実施形態の第1の例]
本発明を実施するための形態について、図を用いながら説明する。
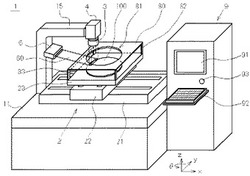
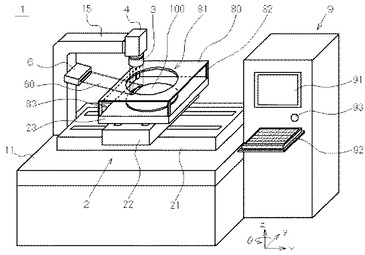
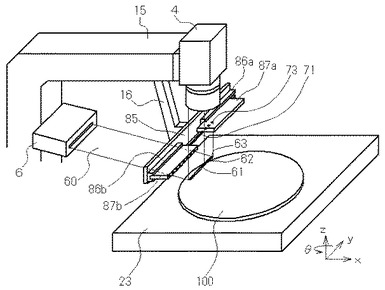
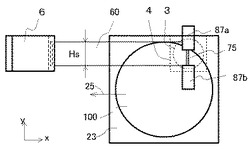
図1は、本発明の実施形態の第1の例を示す斜視図である。図において直交座標系の3軸をX、Y、Zとし、XY平面を水平面、Z方向を鉛直方向とする。特にZ方向は矢印の方向を上とし、その逆方向を下と表現する。
【0025】
光学的測定装置1は、装置ベース11の上に配置されたテーブル駆動部2と、テーブル駆動部2の上方に配置されたレンズ3及び受光手段4と、照明手段6と、制御部9とを含んで、構成されている。
【0026】
テーブル駆動部2は、装置ベース11上に取り付けられたX軸移動機構21と、X軸移動機構21上に取り付けられたY軸移動機構22と、Y軸移動機構22上に取り付けられたテーブル23とを含んで、構成されている。X軸移動機構21は、その上に取り付けられたY軸移動機構22をX方向に移動させることができ、Y軸移動機構22は、その上に取り付けられたテーブル23をY方向に移動させることができる。
【0027】
テーブル23は、上面に溝や孔(図示せず)が形成されており、円形基板100が所定の場所に載置できるようになっている。また、テーブル23に設けられている前記溝や孔は、開閉制御用バルブを介して真空源に接続されている。テーブル23は、上面に測定対象となる円形基板100を載置した状態で、前記溝や孔を負圧にすることにより、円形基板100を吸着保持することができる構造をしている。そのため、テーブル23は、高速かつ往復移動した場合でも、載置した円形基板100を位置ずれしないように保持できるようになっている。
【0028】
レンズ3及び受光手段4は、テーブル23の上方に、測定対象となる円形基板100と対向する位置に配置され、円形基板100を観察できるように、装置ベース11上に取り付けられた支柱15に取り付けられている。レンズ3は、本発明の結像光学系として機能する。また、受光手段4には、受光部が設けられており、レンズ3を通過した光が結像される。
【0029】
照明手段6は、テーブル23の上方に、測定対象となる円形基板100に向けて、ライン状の光60を照射できる位置に配置され、装置ベース11上に取り付けられた支柱15に取り付けられている。ライン状の光60は、Y方向に所定の長さを有する平行な光である。
【0030】
テーブル23には、円形基板100の外形に沿った形の上面開口部81を有する遮光板80が、支持部材82を介して取り付けられている。支持部材82は、遮光板80の四隅に配置され、テーブル23と遮光板80とを所定の間隔に保った状態で固定できる構造をしている。そのため、照明手段6から照射された光60が、側面開口部83を通過して、円形基板100に照射されるようになっている。
【0031】
テーブル23上に載置された円形基板100と上面開口部81とは、一体となって、レンズ3、受光手段4及び照明手段6に対して、XY方向に相対移動できるようになっている。
【0032】
制御部9には、情報入力手段91、情報表示手段92、発報手段93、並びに制御用コンピュータ、情報記録手段、機器制御ユニットなど(図示せず)が接続されて含まれている。
【0033】
情報入力手段91としては、キーボードやマウスやスイッチなどが例示される。
情報表示手段92としては、画像表示ディスプレイやランプなどが例示される。
発報手段93としては、ブザーやスピーカ、ランプなど、作業者に注意喚起をすることができるものが例示される。
【0034】
前記制御用コンピュータには、画像処理ユニットを介して受光手段4が接続されており、受光手段4から出力された計測結果を示す信号が入力される。また、前記制御用コンピュータには、前記情報記録手段、前記機器制御ユニットなどが接続されている。前記制御用コンピュータは、予め登録されたプログラムに基づいて、接続された機器に対して情報や制御信号を出力することができる。
【0035】
前記制御用コンピュータとしては、マイコン、パソコン、ワークステーションなどの、数値演算ユニットが搭載されたものが例示される。
前記情報記録手段としては、メモリーカードやデータディスクなどの、半導体記録媒体や磁気記録媒体や光磁気記録媒体などが例示される。
前記機器制御ユニットとしては、プログラマブルコントローラやモーションコントローラと呼ばれる機器などが例示される。
【0036】
前記機器制御ユニットには、X軸ステージ21と、Y軸ステージ22と、受光手段4と、照明手段6と、その他の制御機器(図示せず)とが、接続されている。
また、前記機器制御ユニットは、前記制御用コンピュータと接続されており、予め登録されたプログラムに基づいて、接続されている各機器に対して制御用信号を与えることにより、前記各機器を動作させたり静止させたりすることができるようになっている。
【0037】
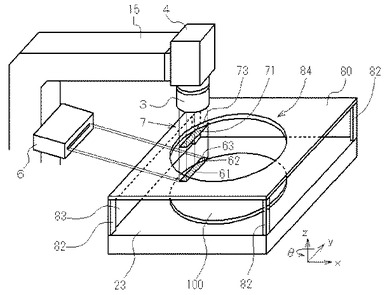
図2は、本発明の実施形態の第1の例を示す要部斜視図である。
照明手段6から照射されたライン状の光60が、側面開口部83を通過して、テーブル23に載置された円形基板100に向かって照射されている。円形基板100に向かって照射された光は、説明のために、基板表面に照射された光61と、基板エッジに照射された光62と、基板の外に照射された光63の3つに分けて定義する。
【0038】
さらに、基板表面に照射された光61が基板100の表面で散乱し、遮光板80の上面開口部81を通過し、結像手段3を通じて受光手段4にて観察される光を、観察される表面散乱光71と呼ぶ。また、基板エッジに照射された光62や基板の外に照射された光63による散乱光は、遮光板80の上面開口部81を通過せず、遮光板80で遮光されるので、遮光される表面散乱光73と呼ぶ。
【0039】
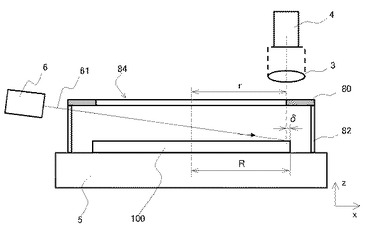
図3は、本発明の実施形態の第1の例を示す断面図である。
ここでは、円形基板100と遮光板80との具体的な構成を説明する。円形基板の外形半径をR、遮光板の内径の半径をr、遮光しろをδと定義する。本発明を実施するに当たり、遮光板の内径半径を、r=(R−δ)となるように設定する。例えばδを0〜1mm程度とし、遮光板の内径半径rが、円形基板の外形半径Rよりわずかに小さくなるように設定する。そうすることで、基板エッジに照射された光62や基板の外に照射された光63による散乱光を、遮光板80で確実に遮光できる。
【0040】
円形基板100をテーブル23に載置する際は、遮光板の内径の中心位置と円形基板100の中心位置とは、予めを合致するように位置合わせしてしておく。また、円形基板の外周部に設けられた、オリフラと呼ばれる直線部分や、ノッチと呼ばれる凹み部分も、上面開口部81の形状と方向が合致するように、角度を合わせてから配置する。
【0041】
側面開口部83の高さは、照明手段6の照射角度と、円形基板100の大きさとを考慮して設定する。そのため、照射手段6から照射された光60は、テーブル23がXY方向に動かしながら、円形基板100の全面に対して、ライン状の照明光線を照射させることができる。
【0042】
上記では測定対象部材として円形基板100を例示して説明したが、他の形状の物でも良い。また、所定の厚みを持った基板状の部材だけでなく、フィルム状の薄い部材でも良く、外形に沿った形で遮光板80の形状を変えることにより種々の形状の測定対象部材に適用できる。
【0043】
こうすることで、測定対象物が角形だけでなく円形や任意の形状であっても、遮光板で覆われた部分だけが欠けた像を得ることができ、測定対象部材のエッジ部分からの散乱光の影響を受けないで、測定対象部材の表面状態を測定することができる。そのため、エッジ周辺部による散乱光の影響を受けることなくライン照明とラインセンサを用いて、高速かつ高精度に、測定対象物の異物の有無や表面状態の測定ができる。
【0044】
[実施形態の第2の例]
図4は本発明の実施形態の第2の例を示す要部斜視図である。
上記で示した図1の装置のうち、図2で示した部分が、図4に置き換わっている。
支柱15には、補助支柱16が取り付けられており、補助支柱16には、支持プレート85が取り付けられている。支持プレート85には、Y方向に所定の長さを有する一対のガイドレール86a,86bが、テーブル23と平行に取り付けられている。前記ガイドレール86a,86bには、Y方向に移動可能な可動式遮光板87a,87bが取り付けられている。
【0045】
可動式遮光板87a,87bは、ボールネジとモータを利用した直動位置決め機構に取り付けられており、前記モータの制御ユニット(いわゆる、モータ用アンプ)が、前記制御機器ユニットに接続されている。前記モータは、サーボモータやパルスモータなど、回転角度を任意に制御できる構造のものであれば良い。また、前記直動位置決め機構としては、リニアモータを利用した機構のものであっても良く、この場合はリニアモータ用アンプが前記制御機器ユニットに接続される。こうすることで、可動式遮光板87a,87bは、前記制御機器ユニットの指令信号に基づいて、Y方向の任意の位置に移動し静止することができるように構成されている。
【0046】
照明手段6から照射された光60は、支持プレート85の下方を通り、テーブル23に載置された円形基板100の表面に照射される。円形基板100に向かって照射された光は、図2で示したのと同様に、基板表面に照射された光61と、基板エッジに照射された光62と、基板の外に照射された光63の3つに分けて定義する。
【0047】
さらに、基板表面に照射された光61が基板100の表面で散乱し、可動式遮光板87a,87bの間を通過し、結像手段3を通じて受光手段4にて観察される光を、観察される表面散乱光75と呼ぶ。また、基板エッジに照射された光62や基板の外に照射された光63による散乱光は、可動式遮光板87a,87bの間を通過せず、可動式遮光板87a,87bで遮光されるので、遮光される表面散乱光77a,77bと呼ぶ。
【0048】
可動式遮光板87a,87bは、お互いが密接して隙間のない状態を全閉状態、お互いが離れ、かつ観察される表面散乱光75が最大限になる状態を全開状態、と定義する。
【0049】
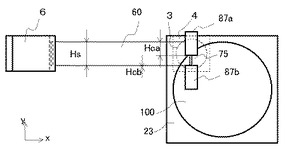
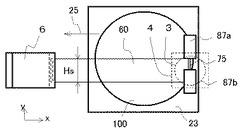
図5は本発明の実施形態の第2の例を示す平面図である。
テーブル23に載置された円形基板100を平面視したときに、照明手段6から照射されるライン状の光60が、円形基板100上に照射されている状態でのX方向の中心位置をXsとし、ライン状の光60の中心位置をYsと定義する。
さらに、ライン状の光60の長さをHs、可動式遮光板87aでライン状の光60を遮光する長さをHca、可動式遮光板87bでライン状の光60を遮光する長さをHcb、と定義する。
可動式遮光板87aは、Hca=0と、Hca=Hsとなる位置に移動ができる。
可動式遮光板87bは、Hcb=0と、Hcb=Hsとなる位置に移動ができる。
図5における可動式遮光板87a,87bの位置は、
可動式遮光板87aの端部がライン状の光60の中心、つまりHca=Hs/2の付近にあり、可動式遮光板87bの端部がライン状の光60を遮光しない位置、つまりHcb=0の位置にある。
【0050】
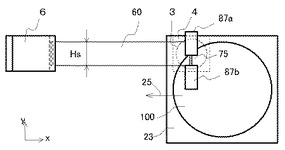
図6A〜6Dは本発明の実施形態の第2の例を示す平面図である。
図6A〜6Dでは、レンズ3、観察手段4及び照明手段6に対して、テーブル23と円形基板100の位置が変化した場合に、可動式遮光板87a、87bが、どの位置にあり、レンズ3と通過して観察手段4の受光部に結像されて観察される表面散乱光75がどのように変化するかを示している。
【0051】
図6Aは、テーブル23と円形基板100とが矢印25の方向に移動しながら、円形基板100の左上部分から中央上部分、X方向に円形基板100の表面を測定を行っている様子を示している。さらに、可動式遮光板87aの端部が、照射された光60の中央部に位置し、可動式遮光板87bの端部が、照射された光60を遮光しない位置にあり、その様子も示している。そして、テーブル23と円形基板100が矢印25の方向に移動すると共に、その移動に合わせて可動式遮光板87aが、円形基板100の外周に添うように追従させ、Y方向の矢印の方向に移動させている。
【0052】
図6Bは、図6Aの状態からテーブル23と円形基板100とが、矢印25の方向に移動した後の状態を示している。可動式遮光板87bの位置は変化無いが、可動式遮光板87aの端部は、円形基板100のエッジ位置がY方向の矢印の方向に移動するのに合わせて、円形基板100の外周に添うように追従させ、Y方向の矢印の方向に移動させている。
【0053】
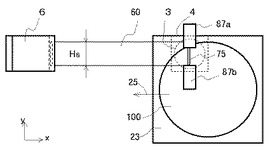
図6Cは、図6Bの状態からテーブル23と円形基板100とが、さらに矢印25の方向に移動して、円形基板100の中央上部分から右上部分、X方向に円形基板100の表面を測定を行っている様子を示している。可動式遮光板87bの位置は変化無いが、可動式遮光板87aの端部は、円形基板100のエッジ位置がY方向の矢印と逆の方向に移動するのに合わせて、円形基板100の外周に添うように追従させ、Y方向の矢印と逆の方向に移動させている。
【0054】
図6Dは、図6Cの状態からテーブル23と円形基板100とを数回スキャン動作させ、さらに矢印25の方向に移動した後、円形基板100の右中央部分から中央部分、X方向に円形基板100の表面を測定を行っている様子を示している。図6Dでは、可動式遮光板87aの端部が、照射された光60を遮光しない位置にあり、可動式遮光板87bの端部は、円形基板100のエッジ位置がY方向の矢印の方向に移動するのに合わせて、Y方向の矢印の方向に移動させている。
【0055】
この後、照射手段6から照射されたライン状の光60が、基板の周辺部分に差しかかるときに、可動式遮光板87a,87bが全閉状態となり、観察される表面散乱光75が無くなり、基板エッジに遮光された光62と基板の外に照射された光63は、すべて可動式遮光板87a,87bで遮光される。
【0056】
円形基板100の外形形状は、制御部9の前記制御用コンピュータに予め登録しておき、上述した本発明の実施形態の第1の例で示したように、円形基板100をテーブル23上に載置する。もしくは、円形基板100がテーブル23上に実際に載置されている状態で、円形基板100のエッジ位置を計測して、前記制御用コンピュータに登録する。
【0057】
測定対象部材が円形基板以外の形状であっても、前記と同様に登録する。そうすることで、測定対象部材の周辺エッジ部の形状と、実際の測定位置に対応させて、可動式遮光板87a,87bのY方向の位置を調節することができる。
【0058】
このようにすれば、測定対象部材のエッジ部で反射又は散乱した光の一部(つまり、受光手段4へ向かう光)を遮光板にて遮って、測定対象部分からの光のみを選択的にラインセンサに結像させることができる。そのため、上述した本発明の実施形態の第1の例に示したような遮光板を基板の形状毎に用意する必要がなくなる。
【0059】
さらに、測定対象物がテーブル23上に載置される位置や角度がずれても、テーブル23上のエッジ位置を計測して、その外形に倣って一対の可動式遮光板87a,87bを移動させることで、開口部を有する遮光板80と同様の遮光効果を得ることができる。したがって、角形だけでなく円形や任意の形状であっても、エッジ周辺部による散乱光の影響を受けることなくライン照明とラインセンサを用いて、高速かつ高精度に、測定対象物の異物の有無や表面状態の測定ができる。
【0060】
[非テレセントリックレンズを用いた測定]
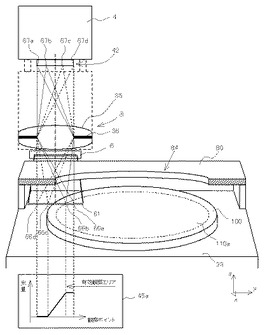
図7は、非テレセントリックレンズを用いた光学的測定装置を示す概念図である。
図7では、上述した本発明の実施形態の第1の例に適用した場合に、本発明の光学的測定装置1をX方向から見たときの、観察部分の光線追跡イメージ図に、観察カメラでの光量変化を示す図45aを、組み合わせて示している。
【0061】
レンズ3は、複数の凸レンズや凹レンズを組み合わせて非テレセントリック系を構成したレンズ35と、アパーチャ36とを組み合わせて構成されている。このレンズ3により、円形基板100上の観察ポイント66aの像は、受光手段4の受光部42上の受光ポイント67aに結像される。同様に、観察ポイント66bの像は受光ポイント67bに、観察ポイント66cの像は受光ポイント67cに、観察ポイント66dの像は受光ポイント67dに結像される。
【0062】
符号45aで示す図では、下記のことを示している。
(1)観察ポイント66aと66bとの間、
ライン照明6から発せられ基板表面に照射された光61からの反射光又は拡散光が、遮光板80の上面開口部81を通過し、レンズ3によってラインセンサ4の受光部42に入光する。従って、円形基板100上からの反射光又は拡散光を最大限に受光可能である。
(2)観察ポイント66bと66cとの間、
ライン照明6から発せられ基板表面に照射された光61からの反射光又は拡散光の一部が、遮光板80の上面開口部81を通過し、レンズ3によってラインセンサ4の受光部42に入光する。従って、円形基板100上からの反射光又は拡散光の一部が受光可能であり、受光可能な量は、観察ポイントにより異なる。
(3)観察ポイント66cと66dとの間
ライン照明6から発せられ基板表面に照射された光61からの反射光又は拡散光が、遮光板80の上面開口部81を通過せず、遮光板80で遮られる。従って、円形基板100上からの反射光又は拡散光は観察できない。
【0063】
このとき、上述した開口部のある遮光板を用いて観察しているので、円形基板100上の破線110aで示す円の内側が、有効観察エリアとなる。
なお、この非テレセントリックレンズは、本発明の実施形態の第2の例にも適用することができる。第2の例においては、測定対象物の外形に倣って一対の可動式遮光板87a,87bを移動させることで、第1の例における開口部を有する遮光板80と同様に、エッジ散乱を遮蔽することができるからである。
【0064】
[テレセントリックレンズを用いた測定]
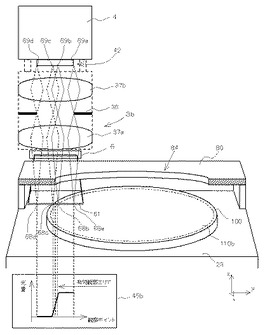
図8は、テレセントリックレンズを用いた光学的測定装置を示す概念図である。
図8では、上述した本発明の実施形態の第1の例に適用した場合に、本発明の光学的測定装置1をX方向から見たときの、観察部分の光線追跡イメージ図に、観察カメラでの光量変化を示す図45bを、組み合わせて示している。
【0065】
レンズ3bは、複数の凸レンズや凹レンズを組み合わせてテレセントリック系を構成したレンズ37a,37bと、アパーチャ36とを組み合わせて構成されている。このレンズ3bにより、円形基板100上の観察ポイント68aの像は、受光手段4の受光部42上の受光ポイント69aに結像される。同様に、観察ポイント68bの像は受光ポイント69bに、観察ポイント68cの像は受光ポイント69cに、観察ポイント68dの像は受光ポイント69dに結像される。
【0066】
符号45bで示す図では、下記のことを示している。
(1)観察ポイント68aと68bとの間、
ライン照明6から発せられ基板表面に照射された光61からの反射光又は拡散光が、遮光板80の上面開口部81を通過し、レンズ3bによってラインセンサ4の受光部42に入光する。従って、円形基板100上からの反射光又は拡散光を最大限に受光可能である。
(2)観察ポイント68bと68cとの間、
ライン照明6から発せられ基板表面に照射された光61からの反射光又は拡散光の一部が、遮光板80の上面開口部81を通過し、レンズ3によってラインセンサ4の受光部42に入光する。従って、円形基板100上からの反射光又は拡散光の一部が受光可能であり、受光可能な量は、観察ポイントにより異なる。
(3)観察ポイント68cと68dとの間
ライン照明6から発せられ基板表面に照射された光61からの反射光又は拡散光が、遮光板80の上面開口部81を通過せず、遮光板80で遮られる。従って、円形基板100上からの反射光又は拡散光は観察できない。
【0067】
このとき、上述した開口部のある遮光板を用いて観察しているので、円形基板100上の破線110bで示す円の内側が、有効観察エリアとなる。さらに、テレセントリックレンズを使用しているので、非テレセントリックレンズを使用した場合と比べて、遮光板による光量不足の影響を受けない範囲が広がる。そのため、測定対象部材の周辺部近傍まで、測定対象部材の表面状態を測定を行うことができ、非テレセントリック光学系の結像光学系を用いた場合と比べて、測定可能領域を広くすることができる。
【0068】
なお、このテレセントリックレンズは、本発明の実施形態の第2の例にも用いることができる。第2の例においては、測定対象物の外形に倣って一対の可動式遮光板87a,87bを移動させることで、第1の例における開口部を有する遮光板80と同様に、エッジ散乱を遮蔽することができるからである。
【0069】
本発明に係る用いた光学的測定方法および光学的測定装置は、上述のようにして測定対象部材表面の表面状態を測定することができるので、測定対象部材の形状にかかわらず、エッジ周辺部からの強い散乱光の影響を受けるずに、所定の長さを有するラインビームを使用して、短い時間で測定を終えることができる。
【0070】
上述では、円形基板100からの散乱光を観察する形態について詳細を述べたが、円形基板100に照射して、正反射した光を観察する形態にも本発明を適応することができる。
【符号の説明】
【0071】
1 光学的測定装置
2 テーブル駆動部
3 レンズ
4 受光手段(ラインセンサ)
5 テーブル
6 照射手段(ライン照明)
7 表面散乱光
9 制御部
15 支柱
21 X軸移動機構
22 Y軸移動機構
23 テーブル
25 矢印
30 エッジ散乱光
35 非テレセントリックレンズ
36 アパーチャ
37 テレセントリックレンズ
40 エッジ周辺部
41 カメラ
42 受光部
45a 観察カメラでの光量変化を示す図
45b 観察カメラでの光量変化を示す図
60 ライン状の光
61 基板表面に照射された光
62 基板エッジに照射された光
63 基板の外に照射された光
66a〜b 観察ポイント
67a〜b 受光ポイント
68a〜b 観察ポイント
69a〜b 受光ポイント
71 観察される表面散乱光
73 遮光される表面散乱光
75 観察される表面散乱光
77a 遮光される表面散乱光
77b 遮光される表面散乱光
80 遮光板
81 上面開口部
82 支持部材
83 側面開口部
85 支持プレート
86a ガイドレール
86b ガイドレール
87a 可動式遮光板
87b 可動式遮光板
91 情報入力手段
92 情報表示手段
93 発報手段
100 円形基板
101 エッジ
110a 有効観察エリア
110b 有効観察エリア
1z 従来の光学的測定装置
7z 表面散乱光
9z 制御部
11z 架台
51z 矢印
52z 矢印
53z 矢印
54z 矢印
61z 基板表面に照射された光
62z 基板エッジに照射された光
100z 角形基板
101z 基板エッジ
102z 基板周辺部
【技術分野】
【0001】
本発明は、半導体ウェーハ、MEMS、HDD、CCD、CMOSまたはカバーガラス用の円形基板などに用いられる部材の表面状態を測定する、光学的測定方法及びその装置に関する。
【背景技術】
【0002】
半導体ウエハーや液晶パネルの製造工程では、成膜や回路パターンの不良の原因となる異物の付着や表面状態の不良の有無を監視するために、光学測定による測定が行われている。図9は、従来のライン照明とラインセンサを用いた光学的測定装置を示す斜視図である。従来の光学的測定装置1zでは、角形基板100zに代表される測定対象部材の表面状態を測定するために、角形基板100zの斜め上方に照明手段2を配置し、照明手段2から、角形基板100zに向けてライン状の照射光6zを照射させる。そうすると、角形基板100zの表面では表面散乱光7zが発生する。
【0003】
この表面散乱光7zは、角形基板100zの上方に配置した結像手段であるレンズ3zを介して集光され、その後、受光手段であるラインセンサ4zに結像される。表面散乱光7zは、ラインセンサ4zで受光された後、ライン方向(図9において矢印Yの方向)の表面散乱光信号に変換し、データ処理手段(図示せず)を通して各種測定情報として取得される。
【0004】
角形基板100zは、テーブル5z上に載置されている。テーブル5zは、光学的測定装置1zの架台11zの上に取り付けられた、X軸移動機構21とY軸移動機構22の上に取り付けられており、XY方向に自在に自在に移動可能となっている。
【0005】
図10は、角形基板100z上をライン状の照射光6zでトレースする様子を示す斜視図である。Y方向に所定の長さを有するライン状の照明が、矢印51zに示す様に、X方向に相対移動される。角形基板100zを通過した後は、矢印52zに示す様に、場所を変えて折り返し、矢印53zに示す様に、X方向に相対移動される。その後、角形基板100zを通過した後は、矢印54zに示す様に、場所を変えて折り返す。その後、前述の動作を繰り返し、角形基板100zの全面に渡って、表面状態を測定することができる。
【0006】
図11は、光学的測定装置1zにおいて、照射光6zが角形基板100zのエッジ部に照射されたときの様子を示す斜視図である。図11に示すようにエッジ101zに照射された光62zは、エッジ散乱と呼ばれる反射光を含む強い光となる。前記エッジ散乱は測定対象物100zの表面に照射された光61zからの散乱光と比べて数倍から数10倍以上も強い強度を持つ。
【0007】
このため、前記エッジ散乱をラインセンサ4が受光すると、測定対象物100zの表面散乱光とは大きく異なるラインセンサ信号を得たり、ラインセンサ信号が飽和したり、ラインセンサ信号に大きなノイズが発生してしまう(ラインセンサ4がラインCCDならば、このようなノイズはブルーミングやスミアと呼ばれる)。これらによって、エッジ101z付近の情報を正しくとることができないことになり、エッジ101z付近の測定を正確に実施することが困難となる。
【0008】
ここではエッジ101z付近の測定困難な領域をエッジ周辺部102zと呼び、図12に示すように測定対象物のエッジ101zから1〜2mm程度内側の部分を指す。
従って、図12に示すように、測定対象物の周辺部102zは測定領域から外し、有効観察エリア103z内の基板表面に照射された光61zのみを観察するのが一般的である。そうすることで、図12のように長方形の基板が測定対象の場合には、位置情報を基にラインセンサの測定開始位置と測定終了位置を正確に設定することで前記長方形基板はエッジ周辺部102zを除いて精密に測定することが可能である。また、照射された光61zは所定の光量があれば良く、それを満たせば、照射された光61zは長さHsを比較的長くして測定に用いることも可能である。そうすることで、所定時間当たりに測定できる面積を増やすことができる。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開2004−177284号
【特許文献2】特開平06−249791号
【発明の概要】
【発明が解決しようとする課題】
【0010】
しかしながら、図13に示すような円形基板を測定の測定対象物とした、ライン照明とラインセンサを用いる光学的測定方法は、ほとんど実用化されていない。
その理由としては次の2つの弊害があるためである。第1の理由としてライン照明とラインセンサを用いた光学的測定方法を円形基板に適用しようとすると、基板表面に照射された光61zが円形基板100のエッジに掛かりやすくなり、エッジ周辺部を避けて有効測定エリアを設定すると、図14に示すように有効測定エリア103zが小さくなってしまうからである。
【0011】
第2の理由として図15のようにスキャン長さHsを小さくすることで有効測定エリア103zを大きくとると、エッジ周辺部付近まで測定することは可能になるが、スキャン数が増えてしまいライン照明とラインセンサを用いた光学的測定方式の最大の長所である高速測定が損なわれてしまうからである。
【0012】
ライン照明とラインセンサによる他の構成には、図示しないエリア照明とエリアセンサの構成が考えられる。この構成では、主に高倍率で小さな領域を順次移動させながら測定する方法が実用化されており、エッジ周辺部を除く領域を測定することが可能になるが、現状の技術では測定速度は遅く、広い領域の測定には不向きである。
【0013】
さらに他の構成としては、図示しない基板を回転させながら、スポット照明を走査させ、センサ(フォトマルなど)で受光する構成がある。このような方式では測定位置の分解能が照明のスポットの大きさに依存するため、位置分解能が大きくなってしまうか、あるいはスポットを小さくして位置分解能を小さくすると、測定領域全域の測定速度が非常に遅くなってしまう。
本発明は、上記事情に鑑みてなされたものであって、その目的とするところは、測定対象物の形状によらず、ライン照明とラインセンサの構成の光学的測定装置を用いて高速かつ高精度に、前記測定対象物のエッジ周辺部付近まで測定する方法および装置を提供することにある。
【課題を解決するための手段】
【0014】
以上の課題を解決するために、請求項1に記載の発明は、
テーブル上に載置された測定対象部材の表面に向けて、所定の長さを有するライン状の照明光線を、前記測定部材の表面に対して所定の角度を保って照射し、
前記測定対象部材の表面で散乱した光の一部を結像光学系を介して受光部に結像させ、
前記テーブルと前記照射光線とを所定の方向に相対的に走査させ、
前記測定対象部材に照射する前記照明光線の照射位置を移動させて
前記測定対象部材の表面状態を測定する光学的測定方法に関して、
前記ライン状の照明光線は所定の長さを有しており、
前記測定対象部材に照射された前記照明光線のうち、
前記測定対象部材の周辺エッジ部に照射されて散乱した光を、
前記測定対象部材と前記結像光学系との間に配置した遮光物で選択的に遮光して、
前記測定対象部材の表面状態を測定することを特徴とする、光学的測定方法である。
【0015】
請求項2に記載の発明は、
測定対象部材を載置するテーブルと、
前記対象部材に向けて、所定の長さを有するライン状の照明光線を、前記測定部材の表面に対して所定の角度で照射する照明手段と、
前記測定対象部材の表面で反射又は散乱した光を受光する受光部と、
前記散乱光を前記受光部に結像させる結像光学系部と
を備える光学的測定装置において、
前記測定対象部材と前記結像光学系部との間に遮光物を配置し、
前記遮光物は、前記測定対象部材の周辺エッジ部で散乱した光を選択的に遮光でき、
前記測定対象部材の周辺部より内側の表面で散乱した光を結像光学系を介して受光部に結像できるように配置されている、
前記測定対象部材の表面状態を測定することを特徴とする、光学的測定装置である。
【0016】
請求項3に記載の発明は、
前記遮光物は開口部を有する遮光板であることを特徴とする、
請求項2の光学的測定装置である。
【0017】
この装置構成によれば、遮光板で覆われた部分だけが欠けた像を得ることができ、測定対象部材のエッジ部分からの散乱光の影響を受けないで、測定対象部材の表面状態を測定することができる。
【0018】
請求項4に記載の発明は、
前記遮光物を構成する部材の少なくとも一部が、測定対象部材の周辺エッジ部の形状と測定位置に対応して、前記ライン状の照明光線の長手方向に位置を変更できるように取り付けられていることを特徴とする、
請求項2の光学的測定装置である。
【0019】
この装置構成によれば、エッジ部で反射又は散乱した光の一部を遮光板にて遮り、測定対象部分からの光のみを選択的にラインセンサに結像させるので、任意の形状に対応して、測定対象部材の表面状態を測定することができる。
【0020】
請求項5に記載の発明は、
前記結像光学系はテレセントリック光学系とすることを特徴とする、
請求項2〜4の光学的測定装置である。
【0021】
この装置構成によれば、遮光板による光量不足の影響を受けず、測定対象部材の周辺部近傍まで、測定対象部材の表面状態を測定することができる。そのため、非テレセントリック光学系の結像光学系を用いた場合と比べて、測定可能領域を広くすることができる。
【発明の効果】
【0022】
本発明の光学的測定方法及びその装置は、測定対象物のエッジ周辺部が任意の形状であっても、エッジ周辺部による散乱光の影響を受けることなくライン照明とラインセンサを用いて、高速かつ高精度に、測定対象物の異物の有無や表面状態の測定ができる。
【図面の簡単な説明】
【0023】
【図1】本発明の実施形態の第1の例を示す斜視図である。
【図2】本発明の実施形態の第1の例を示す要部斜視図である。
【図3】本発明の実施形態の第1の例を示す正面図である。
【図4】本発明の実施形態の第2の例を示す要部斜視図である。
【図5】本発明の実施形態の第2のを示す平面図である。
【図6A】本発明の実施形態の第2の例を示す平面図である。
【図6B】本発明の実施形態の第2の例を示す平面図である。
【図6C】本発明の実施形態の第2の例を示す平面図である。
【図6D】本発明の実施形態の第2の例を示す平面図である。
【図7】非テレセントリックレンズを用いた光学的測定装置を示す概念図である。
【図8】テレセントリックレンズを用いた光学的測定装置を示す図である。
【図9】ライン照明とラインセンサを用いた光学的測定装置の原理図である。
【図10】測定対象物をXY方向に移動しながらスキャンしながら測定する原理図である。
【図11】照射光のエッジ散乱を示す図である。
【図12】エッジおよびエッジ周辺部を示す図である。
【図13】円形基板に対するライン照明とラインセンサを用いた光学的測定装置を示す図である。
【図14】円形基板に対するライン照明とラインセンサを用いた光学的測定装置を示す図である。
【図15】円形基板に対するライン照明とラインセンサを用いた光学的測定装置を示す図である。
【発明を実施するための形態】
【0024】
[実施形態の第1の例]
本発明を実施するための形態について、図を用いながら説明する。
図1は、本発明の実施形態の第1の例を示す斜視図である。図において直交座標系の3軸をX、Y、Zとし、XY平面を水平面、Z方向を鉛直方向とする。特にZ方向は矢印の方向を上とし、その逆方向を下と表現する。
【0025】
光学的測定装置1は、装置ベース11の上に配置されたテーブル駆動部2と、テーブル駆動部2の上方に配置されたレンズ3及び受光手段4と、照明手段6と、制御部9とを含んで、構成されている。
【0026】
テーブル駆動部2は、装置ベース11上に取り付けられたX軸移動機構21と、X軸移動機構21上に取り付けられたY軸移動機構22と、Y軸移動機構22上に取り付けられたテーブル23とを含んで、構成されている。X軸移動機構21は、その上に取り付けられたY軸移動機構22をX方向に移動させることができ、Y軸移動機構22は、その上に取り付けられたテーブル23をY方向に移動させることができる。
【0027】
テーブル23は、上面に溝や孔(図示せず)が形成されており、円形基板100が所定の場所に載置できるようになっている。また、テーブル23に設けられている前記溝や孔は、開閉制御用バルブを介して真空源に接続されている。テーブル23は、上面に測定対象となる円形基板100を載置した状態で、前記溝や孔を負圧にすることにより、円形基板100を吸着保持することができる構造をしている。そのため、テーブル23は、高速かつ往復移動した場合でも、載置した円形基板100を位置ずれしないように保持できるようになっている。
【0028】
レンズ3及び受光手段4は、テーブル23の上方に、測定対象となる円形基板100と対向する位置に配置され、円形基板100を観察できるように、装置ベース11上に取り付けられた支柱15に取り付けられている。レンズ3は、本発明の結像光学系として機能する。また、受光手段4には、受光部が設けられており、レンズ3を通過した光が結像される。
【0029】
照明手段6は、テーブル23の上方に、測定対象となる円形基板100に向けて、ライン状の光60を照射できる位置に配置され、装置ベース11上に取り付けられた支柱15に取り付けられている。ライン状の光60は、Y方向に所定の長さを有する平行な光である。
【0030】
テーブル23には、円形基板100の外形に沿った形の上面開口部81を有する遮光板80が、支持部材82を介して取り付けられている。支持部材82は、遮光板80の四隅に配置され、テーブル23と遮光板80とを所定の間隔に保った状態で固定できる構造をしている。そのため、照明手段6から照射された光60が、側面開口部83を通過して、円形基板100に照射されるようになっている。
【0031】
テーブル23上に載置された円形基板100と上面開口部81とは、一体となって、レンズ3、受光手段4及び照明手段6に対して、XY方向に相対移動できるようになっている。
【0032】
制御部9には、情報入力手段91、情報表示手段92、発報手段93、並びに制御用コンピュータ、情報記録手段、機器制御ユニットなど(図示せず)が接続されて含まれている。
【0033】
情報入力手段91としては、キーボードやマウスやスイッチなどが例示される。
情報表示手段92としては、画像表示ディスプレイやランプなどが例示される。
発報手段93としては、ブザーやスピーカ、ランプなど、作業者に注意喚起をすることができるものが例示される。
【0034】
前記制御用コンピュータには、画像処理ユニットを介して受光手段4が接続されており、受光手段4から出力された計測結果を示す信号が入力される。また、前記制御用コンピュータには、前記情報記録手段、前記機器制御ユニットなどが接続されている。前記制御用コンピュータは、予め登録されたプログラムに基づいて、接続された機器に対して情報や制御信号を出力することができる。
【0035】
前記制御用コンピュータとしては、マイコン、パソコン、ワークステーションなどの、数値演算ユニットが搭載されたものが例示される。
前記情報記録手段としては、メモリーカードやデータディスクなどの、半導体記録媒体や磁気記録媒体や光磁気記録媒体などが例示される。
前記機器制御ユニットとしては、プログラマブルコントローラやモーションコントローラと呼ばれる機器などが例示される。
【0036】
前記機器制御ユニットには、X軸ステージ21と、Y軸ステージ22と、受光手段4と、照明手段6と、その他の制御機器(図示せず)とが、接続されている。
また、前記機器制御ユニットは、前記制御用コンピュータと接続されており、予め登録されたプログラムに基づいて、接続されている各機器に対して制御用信号を与えることにより、前記各機器を動作させたり静止させたりすることができるようになっている。
【0037】
図2は、本発明の実施形態の第1の例を示す要部斜視図である。
照明手段6から照射されたライン状の光60が、側面開口部83を通過して、テーブル23に載置された円形基板100に向かって照射されている。円形基板100に向かって照射された光は、説明のために、基板表面に照射された光61と、基板エッジに照射された光62と、基板の外に照射された光63の3つに分けて定義する。
【0038】
さらに、基板表面に照射された光61が基板100の表面で散乱し、遮光板80の上面開口部81を通過し、結像手段3を通じて受光手段4にて観察される光を、観察される表面散乱光71と呼ぶ。また、基板エッジに照射された光62や基板の外に照射された光63による散乱光は、遮光板80の上面開口部81を通過せず、遮光板80で遮光されるので、遮光される表面散乱光73と呼ぶ。
【0039】
図3は、本発明の実施形態の第1の例を示す断面図である。
ここでは、円形基板100と遮光板80との具体的な構成を説明する。円形基板の外形半径をR、遮光板の内径の半径をr、遮光しろをδと定義する。本発明を実施するに当たり、遮光板の内径半径を、r=(R−δ)となるように設定する。例えばδを0〜1mm程度とし、遮光板の内径半径rが、円形基板の外形半径Rよりわずかに小さくなるように設定する。そうすることで、基板エッジに照射された光62や基板の外に照射された光63による散乱光を、遮光板80で確実に遮光できる。
【0040】
円形基板100をテーブル23に載置する際は、遮光板の内径の中心位置と円形基板100の中心位置とは、予めを合致するように位置合わせしてしておく。また、円形基板の外周部に設けられた、オリフラと呼ばれる直線部分や、ノッチと呼ばれる凹み部分も、上面開口部81の形状と方向が合致するように、角度を合わせてから配置する。
【0041】
側面開口部83の高さは、照明手段6の照射角度と、円形基板100の大きさとを考慮して設定する。そのため、照射手段6から照射された光60は、テーブル23がXY方向に動かしながら、円形基板100の全面に対して、ライン状の照明光線を照射させることができる。
【0042】
上記では測定対象部材として円形基板100を例示して説明したが、他の形状の物でも良い。また、所定の厚みを持った基板状の部材だけでなく、フィルム状の薄い部材でも良く、外形に沿った形で遮光板80の形状を変えることにより種々の形状の測定対象部材に適用できる。
【0043】
こうすることで、測定対象物が角形だけでなく円形や任意の形状であっても、遮光板で覆われた部分だけが欠けた像を得ることができ、測定対象部材のエッジ部分からの散乱光の影響を受けないで、測定対象部材の表面状態を測定することができる。そのため、エッジ周辺部による散乱光の影響を受けることなくライン照明とラインセンサを用いて、高速かつ高精度に、測定対象物の異物の有無や表面状態の測定ができる。
【0044】
[実施形態の第2の例]
図4は本発明の実施形態の第2の例を示す要部斜視図である。
上記で示した図1の装置のうち、図2で示した部分が、図4に置き換わっている。
支柱15には、補助支柱16が取り付けられており、補助支柱16には、支持プレート85が取り付けられている。支持プレート85には、Y方向に所定の長さを有する一対のガイドレール86a,86bが、テーブル23と平行に取り付けられている。前記ガイドレール86a,86bには、Y方向に移動可能な可動式遮光板87a,87bが取り付けられている。
【0045】
可動式遮光板87a,87bは、ボールネジとモータを利用した直動位置決め機構に取り付けられており、前記モータの制御ユニット(いわゆる、モータ用アンプ)が、前記制御機器ユニットに接続されている。前記モータは、サーボモータやパルスモータなど、回転角度を任意に制御できる構造のものであれば良い。また、前記直動位置決め機構としては、リニアモータを利用した機構のものであっても良く、この場合はリニアモータ用アンプが前記制御機器ユニットに接続される。こうすることで、可動式遮光板87a,87bは、前記制御機器ユニットの指令信号に基づいて、Y方向の任意の位置に移動し静止することができるように構成されている。
【0046】
照明手段6から照射された光60は、支持プレート85の下方を通り、テーブル23に載置された円形基板100の表面に照射される。円形基板100に向かって照射された光は、図2で示したのと同様に、基板表面に照射された光61と、基板エッジに照射された光62と、基板の外に照射された光63の3つに分けて定義する。
【0047】
さらに、基板表面に照射された光61が基板100の表面で散乱し、可動式遮光板87a,87bの間を通過し、結像手段3を通じて受光手段4にて観察される光を、観察される表面散乱光75と呼ぶ。また、基板エッジに照射された光62や基板の外に照射された光63による散乱光は、可動式遮光板87a,87bの間を通過せず、可動式遮光板87a,87bで遮光されるので、遮光される表面散乱光77a,77bと呼ぶ。
【0048】
可動式遮光板87a,87bは、お互いが密接して隙間のない状態を全閉状態、お互いが離れ、かつ観察される表面散乱光75が最大限になる状態を全開状態、と定義する。
【0049】
図5は本発明の実施形態の第2の例を示す平面図である。
テーブル23に載置された円形基板100を平面視したときに、照明手段6から照射されるライン状の光60が、円形基板100上に照射されている状態でのX方向の中心位置をXsとし、ライン状の光60の中心位置をYsと定義する。
さらに、ライン状の光60の長さをHs、可動式遮光板87aでライン状の光60を遮光する長さをHca、可動式遮光板87bでライン状の光60を遮光する長さをHcb、と定義する。
可動式遮光板87aは、Hca=0と、Hca=Hsとなる位置に移動ができる。
可動式遮光板87bは、Hcb=0と、Hcb=Hsとなる位置に移動ができる。
図5における可動式遮光板87a,87bの位置は、
可動式遮光板87aの端部がライン状の光60の中心、つまりHca=Hs/2の付近にあり、可動式遮光板87bの端部がライン状の光60を遮光しない位置、つまりHcb=0の位置にある。
【0050】
図6A〜6Dは本発明の実施形態の第2の例を示す平面図である。
図6A〜6Dでは、レンズ3、観察手段4及び照明手段6に対して、テーブル23と円形基板100の位置が変化した場合に、可動式遮光板87a、87bが、どの位置にあり、レンズ3と通過して観察手段4の受光部に結像されて観察される表面散乱光75がどのように変化するかを示している。
【0051】
図6Aは、テーブル23と円形基板100とが矢印25の方向に移動しながら、円形基板100の左上部分から中央上部分、X方向に円形基板100の表面を測定を行っている様子を示している。さらに、可動式遮光板87aの端部が、照射された光60の中央部に位置し、可動式遮光板87bの端部が、照射された光60を遮光しない位置にあり、その様子も示している。そして、テーブル23と円形基板100が矢印25の方向に移動すると共に、その移動に合わせて可動式遮光板87aが、円形基板100の外周に添うように追従させ、Y方向の矢印の方向に移動させている。
【0052】
図6Bは、図6Aの状態からテーブル23と円形基板100とが、矢印25の方向に移動した後の状態を示している。可動式遮光板87bの位置は変化無いが、可動式遮光板87aの端部は、円形基板100のエッジ位置がY方向の矢印の方向に移動するのに合わせて、円形基板100の外周に添うように追従させ、Y方向の矢印の方向に移動させている。
【0053】
図6Cは、図6Bの状態からテーブル23と円形基板100とが、さらに矢印25の方向に移動して、円形基板100の中央上部分から右上部分、X方向に円形基板100の表面を測定を行っている様子を示している。可動式遮光板87bの位置は変化無いが、可動式遮光板87aの端部は、円形基板100のエッジ位置がY方向の矢印と逆の方向に移動するのに合わせて、円形基板100の外周に添うように追従させ、Y方向の矢印と逆の方向に移動させている。
【0054】
図6Dは、図6Cの状態からテーブル23と円形基板100とを数回スキャン動作させ、さらに矢印25の方向に移動した後、円形基板100の右中央部分から中央部分、X方向に円形基板100の表面を測定を行っている様子を示している。図6Dでは、可動式遮光板87aの端部が、照射された光60を遮光しない位置にあり、可動式遮光板87bの端部は、円形基板100のエッジ位置がY方向の矢印の方向に移動するのに合わせて、Y方向の矢印の方向に移動させている。
【0055】
この後、照射手段6から照射されたライン状の光60が、基板の周辺部分に差しかかるときに、可動式遮光板87a,87bが全閉状態となり、観察される表面散乱光75が無くなり、基板エッジに遮光された光62と基板の外に照射された光63は、すべて可動式遮光板87a,87bで遮光される。
【0056】
円形基板100の外形形状は、制御部9の前記制御用コンピュータに予め登録しておき、上述した本発明の実施形態の第1の例で示したように、円形基板100をテーブル23上に載置する。もしくは、円形基板100がテーブル23上に実際に載置されている状態で、円形基板100のエッジ位置を計測して、前記制御用コンピュータに登録する。
【0057】
測定対象部材が円形基板以外の形状であっても、前記と同様に登録する。そうすることで、測定対象部材の周辺エッジ部の形状と、実際の測定位置に対応させて、可動式遮光板87a,87bのY方向の位置を調節することができる。
【0058】
このようにすれば、測定対象部材のエッジ部で反射又は散乱した光の一部(つまり、受光手段4へ向かう光)を遮光板にて遮って、測定対象部分からの光のみを選択的にラインセンサに結像させることができる。そのため、上述した本発明の実施形態の第1の例に示したような遮光板を基板の形状毎に用意する必要がなくなる。
【0059】
さらに、測定対象物がテーブル23上に載置される位置や角度がずれても、テーブル23上のエッジ位置を計測して、その外形に倣って一対の可動式遮光板87a,87bを移動させることで、開口部を有する遮光板80と同様の遮光効果を得ることができる。したがって、角形だけでなく円形や任意の形状であっても、エッジ周辺部による散乱光の影響を受けることなくライン照明とラインセンサを用いて、高速かつ高精度に、測定対象物の異物の有無や表面状態の測定ができる。
【0060】
[非テレセントリックレンズを用いた測定]
図7は、非テレセントリックレンズを用いた光学的測定装置を示す概念図である。
図7では、上述した本発明の実施形態の第1の例に適用した場合に、本発明の光学的測定装置1をX方向から見たときの、観察部分の光線追跡イメージ図に、観察カメラでの光量変化を示す図45aを、組み合わせて示している。
【0061】
レンズ3は、複数の凸レンズや凹レンズを組み合わせて非テレセントリック系を構成したレンズ35と、アパーチャ36とを組み合わせて構成されている。このレンズ3により、円形基板100上の観察ポイント66aの像は、受光手段4の受光部42上の受光ポイント67aに結像される。同様に、観察ポイント66bの像は受光ポイント67bに、観察ポイント66cの像は受光ポイント67cに、観察ポイント66dの像は受光ポイント67dに結像される。
【0062】
符号45aで示す図では、下記のことを示している。
(1)観察ポイント66aと66bとの間、
ライン照明6から発せられ基板表面に照射された光61からの反射光又は拡散光が、遮光板80の上面開口部81を通過し、レンズ3によってラインセンサ4の受光部42に入光する。従って、円形基板100上からの反射光又は拡散光を最大限に受光可能である。
(2)観察ポイント66bと66cとの間、
ライン照明6から発せられ基板表面に照射された光61からの反射光又は拡散光の一部が、遮光板80の上面開口部81を通過し、レンズ3によってラインセンサ4の受光部42に入光する。従って、円形基板100上からの反射光又は拡散光の一部が受光可能であり、受光可能な量は、観察ポイントにより異なる。
(3)観察ポイント66cと66dとの間
ライン照明6から発せられ基板表面に照射された光61からの反射光又は拡散光が、遮光板80の上面開口部81を通過せず、遮光板80で遮られる。従って、円形基板100上からの反射光又は拡散光は観察できない。
【0063】
このとき、上述した開口部のある遮光板を用いて観察しているので、円形基板100上の破線110aで示す円の内側が、有効観察エリアとなる。
なお、この非テレセントリックレンズは、本発明の実施形態の第2の例にも適用することができる。第2の例においては、測定対象物の外形に倣って一対の可動式遮光板87a,87bを移動させることで、第1の例における開口部を有する遮光板80と同様に、エッジ散乱を遮蔽することができるからである。
【0064】
[テレセントリックレンズを用いた測定]
図8は、テレセントリックレンズを用いた光学的測定装置を示す概念図である。
図8では、上述した本発明の実施形態の第1の例に適用した場合に、本発明の光学的測定装置1をX方向から見たときの、観察部分の光線追跡イメージ図に、観察カメラでの光量変化を示す図45bを、組み合わせて示している。
【0065】
レンズ3bは、複数の凸レンズや凹レンズを組み合わせてテレセントリック系を構成したレンズ37a,37bと、アパーチャ36とを組み合わせて構成されている。このレンズ3bにより、円形基板100上の観察ポイント68aの像は、受光手段4の受光部42上の受光ポイント69aに結像される。同様に、観察ポイント68bの像は受光ポイント69bに、観察ポイント68cの像は受光ポイント69cに、観察ポイント68dの像は受光ポイント69dに結像される。
【0066】
符号45bで示す図では、下記のことを示している。
(1)観察ポイント68aと68bとの間、
ライン照明6から発せられ基板表面に照射された光61からの反射光又は拡散光が、遮光板80の上面開口部81を通過し、レンズ3bによってラインセンサ4の受光部42に入光する。従って、円形基板100上からの反射光又は拡散光を最大限に受光可能である。
(2)観察ポイント68bと68cとの間、
ライン照明6から発せられ基板表面に照射された光61からの反射光又は拡散光の一部が、遮光板80の上面開口部81を通過し、レンズ3によってラインセンサ4の受光部42に入光する。従って、円形基板100上からの反射光又は拡散光の一部が受光可能であり、受光可能な量は、観察ポイントにより異なる。
(3)観察ポイント68cと68dとの間
ライン照明6から発せられ基板表面に照射された光61からの反射光又は拡散光が、遮光板80の上面開口部81を通過せず、遮光板80で遮られる。従って、円形基板100上からの反射光又は拡散光は観察できない。
【0067】
このとき、上述した開口部のある遮光板を用いて観察しているので、円形基板100上の破線110bで示す円の内側が、有効観察エリアとなる。さらに、テレセントリックレンズを使用しているので、非テレセントリックレンズを使用した場合と比べて、遮光板による光量不足の影響を受けない範囲が広がる。そのため、測定対象部材の周辺部近傍まで、測定対象部材の表面状態を測定を行うことができ、非テレセントリック光学系の結像光学系を用いた場合と比べて、測定可能領域を広くすることができる。
【0068】
なお、このテレセントリックレンズは、本発明の実施形態の第2の例にも用いることができる。第2の例においては、測定対象物の外形に倣って一対の可動式遮光板87a,87bを移動させることで、第1の例における開口部を有する遮光板80と同様に、エッジ散乱を遮蔽することができるからである。
【0069】
本発明に係る用いた光学的測定方法および光学的測定装置は、上述のようにして測定対象部材表面の表面状態を測定することができるので、測定対象部材の形状にかかわらず、エッジ周辺部からの強い散乱光の影響を受けるずに、所定の長さを有するラインビームを使用して、短い時間で測定を終えることができる。
【0070】
上述では、円形基板100からの散乱光を観察する形態について詳細を述べたが、円形基板100に照射して、正反射した光を観察する形態にも本発明を適応することができる。
【符号の説明】
【0071】
1 光学的測定装置
2 テーブル駆動部
3 レンズ
4 受光手段(ラインセンサ)
5 テーブル
6 照射手段(ライン照明)
7 表面散乱光
9 制御部
15 支柱
21 X軸移動機構
22 Y軸移動機構
23 テーブル
25 矢印
30 エッジ散乱光
35 非テレセントリックレンズ
36 アパーチャ
37 テレセントリックレンズ
40 エッジ周辺部
41 カメラ
42 受光部
45a 観察カメラでの光量変化を示す図
45b 観察カメラでの光量変化を示す図
60 ライン状の光
61 基板表面に照射された光
62 基板エッジに照射された光
63 基板の外に照射された光
66a〜b 観察ポイント
67a〜b 受光ポイント
68a〜b 観察ポイント
69a〜b 受光ポイント
71 観察される表面散乱光
73 遮光される表面散乱光
75 観察される表面散乱光
77a 遮光される表面散乱光
77b 遮光される表面散乱光
80 遮光板
81 上面開口部
82 支持部材
83 側面開口部
85 支持プレート
86a ガイドレール
86b ガイドレール
87a 可動式遮光板
87b 可動式遮光板
91 情報入力手段
92 情報表示手段
93 発報手段
100 円形基板
101 エッジ
110a 有効観察エリア
110b 有効観察エリア
1z 従来の光学的測定装置
7z 表面散乱光
9z 制御部
11z 架台
51z 矢印
52z 矢印
53z 矢印
54z 矢印
61z 基板表面に照射された光
62z 基板エッジに照射された光
100z 角形基板
101z 基板エッジ
102z 基板周辺部
【特許請求の範囲】
【請求項1】
テーブル上に載置された測定対象部材の表面に向けて、所定の長さを有するライン状の照明光線を、前記測定部材の表面に対して所定の角度を保って照射し、
前記測定対象部材の表面で散乱した光の一部を結像光学系を介して受光部に結像させ、
前記テーブルと前記照射光線とを所定の方向に相対的に走査させ、
前記測定対象部材に照射する前記照明光線の照射位置を移動させて
前記測定対象部材の表面状態を測定する光学的測定方法に関して、
前記ライン状の照明光線は所定の長さを有しており、
前記測定対象部材に照射された前記照明光線のうち、
前記測定対象部材の周辺エッジ部に照射されて散乱した光を、
前記測定対象部材と前記結像光学系との間に配置した遮光物で選択的に遮光して、
前記測定対象部材の表面状態を測定することを特徴とする、光学的測定方法。
【請求項2】
測定対象部材を載置するテーブルと、
前記対象部材に向けて、所定の長さを有するライン状の照明光線を、前記測定部材の表面に対して所定の角度で照射する照明手段と、
前記測定対象部材の表面で反射又は散乱した光を受光する受光部と、
前記散乱光を前記受光部に結像させる結像光学系部と
を備える光学的測定装置において、
前記測定対象部材と前記結像光学系部との間に遮光物を配置し、
前記遮光物は、前記測定対象部材の周辺エッジ部で散乱した光を選択的に遮光でき、
前記測定対象部材の周辺部より内側の表面で散乱した光を結像光学系を介して受光部に結像できるように配置されている、
前記測定対象部材の表面状態を測定することを特徴とする、光学的測定装置。
【請求項3】
前記遮光物は、前記テーブルに取り付けられた、開口部を有する遮光板であることを特徴とする、請求項2の光学的測定装置。
【請求項4】
前記遮光物を構成する部材の少なくとも一部が、測定対象部材の周辺エッジ部の形状と測定位置に対応して、前記ライン状の照明光線の長手方向に位置を変更できるように取り付けられていることを特徴とする、
請求項2の光学的測定装置。
【請求項5】
前記結像光学系はテレセントリック光学系とすることを特徴とする、
請求項2〜4の光学的測定装置。
【請求項1】
テーブル上に載置された測定対象部材の表面に向けて、所定の長さを有するライン状の照明光線を、前記測定部材の表面に対して所定の角度を保って照射し、
前記測定対象部材の表面で散乱した光の一部を結像光学系を介して受光部に結像させ、
前記テーブルと前記照射光線とを所定の方向に相対的に走査させ、
前記測定対象部材に照射する前記照明光線の照射位置を移動させて
前記測定対象部材の表面状態を測定する光学的測定方法に関して、
前記ライン状の照明光線は所定の長さを有しており、
前記測定対象部材に照射された前記照明光線のうち、
前記測定対象部材の周辺エッジ部に照射されて散乱した光を、
前記測定対象部材と前記結像光学系との間に配置した遮光物で選択的に遮光して、
前記測定対象部材の表面状態を測定することを特徴とする、光学的測定方法。
【請求項2】
測定対象部材を載置するテーブルと、
前記対象部材に向けて、所定の長さを有するライン状の照明光線を、前記測定部材の表面に対して所定の角度で照射する照明手段と、
前記測定対象部材の表面で反射又は散乱した光を受光する受光部と、
前記散乱光を前記受光部に結像させる結像光学系部と
を備える光学的測定装置において、
前記測定対象部材と前記結像光学系部との間に遮光物を配置し、
前記遮光物は、前記測定対象部材の周辺エッジ部で散乱した光を選択的に遮光でき、
前記測定対象部材の周辺部より内側の表面で散乱した光を結像光学系を介して受光部に結像できるように配置されている、
前記測定対象部材の表面状態を測定することを特徴とする、光学的測定装置。
【請求項3】
前記遮光物は、前記テーブルに取り付けられた、開口部を有する遮光板であることを特徴とする、請求項2の光学的測定装置。
【請求項4】
前記遮光物を構成する部材の少なくとも一部が、測定対象部材の周辺エッジ部の形状と測定位置に対応して、前記ライン状の照明光線の長手方向に位置を変更できるように取り付けられていることを特徴とする、
請求項2の光学的測定装置。
【請求項5】
前記結像光学系はテレセントリック光学系とすることを特徴とする、
請求項2〜4の光学的測定装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6A】
【図6B】
【図6C】
【図6D】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6A】
【図6B】
【図6C】
【図6D】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2012−21780(P2012−21780A)
【公開日】平成24年2月2日(2012.2.2)
【国際特許分類】
【出願番号】特願2010−157442(P2010−157442)
【出願日】平成22年7月12日(2010.7.12)
【出願人】(000219314)東レエンジニアリング株式会社 (505)
【Fターム(参考)】
【公開日】平成24年2月2日(2012.2.2)
【国際特許分類】
【出願日】平成22年7月12日(2010.7.12)
【出願人】(000219314)東レエンジニアリング株式会社 (505)
【Fターム(参考)】
[ Back to top ]