
円柱体の回転位置決め装置
【課題】横倒させた円柱体Wを移動及び回転させながら、円柱体Wの回転位置決めを行うに際して、摩耗粉の発生を防止し、摩耗粉を原因としていた各種不具合を防止する。
【解決手段】レール部材3上の円柱体Wに当接する回転ローラ20と、回転ローラ20を回転駆動するローラ回転機構21と、回転ローラ20をレール部材3上の円柱体Wに接離させるローラ接離機構22と、回転ローラ20を送り爪5に同調させつつレール部材3に沿って移動させるローラ移動機構23とを有し、ローラ移動機構23には、回転ローラ20が円柱体Wに当接するよりも先に円柱体Wの一端部に当接して円柱体Wを送り爪5よりも搬送方向の下流側へ離反させる先行送り爪53が設けられており、この先行送り爪53には、回転ローラ20で回転される円柱体Wから転動力を受けて従動回転するロータ54が設けられている。
【解決手段】レール部材3上の円柱体Wに当接する回転ローラ20と、回転ローラ20を回転駆動するローラ回転機構21と、回転ローラ20をレール部材3上の円柱体Wに接離させるローラ接離機構22と、回転ローラ20を送り爪5に同調させつつレール部材3に沿って移動させるローラ移動機構23とを有し、ローラ移動機構23には、回転ローラ20が円柱体Wに当接するよりも先に円柱体Wの一端部に当接して円柱体Wを送り爪5よりも搬送方向の下流側へ離反させる先行送り爪53が設けられており、この先行送り爪53には、回転ローラ20で回転される円柱体Wから転動力を受けて従動回転するロータ54が設けられている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、円柱形をした対象物(以下、単に「円柱体」と言う)を横倒させた状態で回転させ、所定回転角度で停止させるようにした回転位置決め装置に関するものである。
【背景技術】
【0002】
飲料容器などの円柱体に対し、その外周面に貼付されたラベルの絵柄等を基準にして回転向きを揃えようとする場合などに、この円柱体の周方向位置(回転角度)の位置決めが必要になることがある。
従来、この種の位置決めを行うための回転位置決め装置は、円柱体にラベルを貼付するためのラベル貼付装置と、ラベル貼付後の円柱体を収縮フィルムにて覆うピロー包装機との間などで、円柱体を横倒させた状態にして連続搬送する搬送機構と組み合わせて構成されている(例えば、特許文献1,2等参照)。
【0003】
搬送機構は、横倒させた円柱体の外周面をその周方向2箇所で支持するように配置された2本のレール部材と、これら2本のレール部材の相互間でレール方向に沿って移動可能に設けられた送り爪とを有したものとされている。そして、送り爪を円柱体の一端(搬送方向上流側の面)に係合させて、当該円柱体をレール部材上で滑らすように移動させる。
これに対し、回転位置決め装置は、レール部材で支持された円柱体の外周面にその上方から回転ローラを押し付け、回転ローラを回転駆動することで円柱体に転動力(回転力)を付与させ、回転する円柱体から位置マークを検出する構成となっている。この回転ローラは、送り爪に同調してレール方向に移動する。すなわち、円柱体をレール方向に移動させつつ、円柱体を同時に回転させるようになっている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】実開昭54−62283号公報
【特許文献2】特開平4−173616号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
従来の回転位置決め装置では、送り爪を円柱体の一端に係合させた状態のまま、円柱体を移動と同時に回転ローラで回転させ、回転位置決めを行うようにしていたので、円柱体と送り爪との係合部分からは、円柱体又は送り爪を形成している素材(金属や樹脂)の摩耗粉が発生することがあった。
このような摩耗粉は、搬送機構や回転位置決め装置の可動部に付着堆積して機械部品の異常摩耗や可動不良の原因になったり、各種センサの検出部に付着して検出不良の原因になったり、円柱体側に付着して汚損などの品質低下に繋がったりするといった問題があった。
【0006】
本発明は、上記事情に鑑みてなされたものであって、円柱体を移動及び回転させながら回転位置決めを行うに際して、摩耗粉の発生を防止し、摩耗粉を原因としていた各種不具合(装置側の異常摩耗、各種センサの検出不良、円柱体の品質低下など)を防止できるようにした円柱体の回転位置決め装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
前記目的を達成するために、本発明は次の手段を講じた。
即ち、本発明に係る円柱体の回転位置決め装置は、横倒させた円柱体を2本以上のレール部材で支持しつつ円柱体の一端に係合する送り爪で当該円柱体をレール部材に沿って移動させる搬送機構に対して備えられる円柱体の回転位置決め装置において、レール部材で支持された円柱体の外周面に当接して当該円柱体をレール部材上で転動させる方向に回転自在とされた回転ローラと、回転ローラを回転駆動するローラ回転機構と、回転ローラを前記レール部材上の円柱体に接離させるローラ接離機構と、回転ローラを前記送り爪に同調させつつレール部材に沿って移動させるローラ移動機構とを有しており、前記ローラ移動機構には、回転ローラが円柱体に当接するよりも先に円柱体の一端部に当接して円柱体
を送り爪よりも搬送方向の下流側へ離反させる先行送り爪が設けられており、この先行送り爪には、回転ローラで回転される円柱体から転動力を受けて従動回転するロータが設けられていることを特徴とする。
【0008】
前記先行送り爪は、回転ローラを回転自在に保持するローラアームに対して回転ローラのローラ支軸をレール部材の上流方向へ突出させた先端側に取り付けられているのが好ましい。
前記先行送り爪のロータは、回転軸心を上下方向に向けて回転自在に保持されており、回転する外周面を円柱体の端部に後方から当接する構成とするのが好ましい。
【0009】
前記ローラ移動機構は、送り爪によって移動する円柱体の後方から先行送り爪を送り爪より高速で同方向へ移動させて円柱体に当接させ、送り爪から円柱体が離反した後に送り爪の移動速度に先行送り爪の移動速度を合致させる構成とするのが好適である。
【発明の効果】
【0010】
本発明に係る円柱体の回転位置決め装置は、円柱体を移動及び回転させながら回転位置決めを行うに際して、摩耗粉の発生を防止し、摩耗粉を原因としていた各種不具合を防止できるようになる。
【図面の簡単な説明】
【0011】
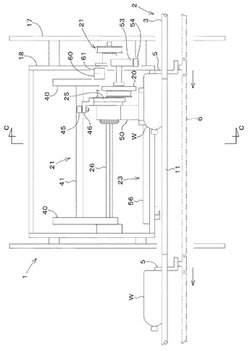
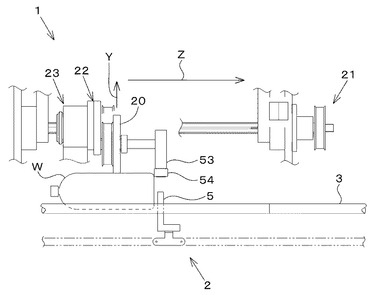
【図1】本発明に係る回転位置決め装置の一実施形態を示した正面図(図4のA−A線矢視図に相当)である。
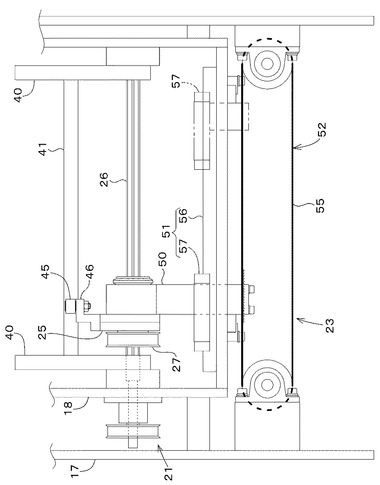
【図2】ローラ移動機構を示した背面図(図4のB−B線矢視図に相当)である。
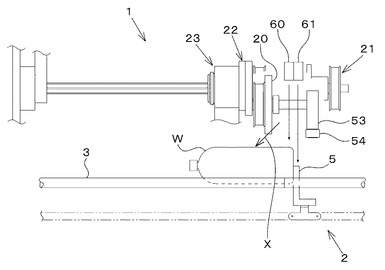
【図3】回転位置決め装置を背面側から示した斜視図である。
【図4】図1のC−C線拡大断面図である。
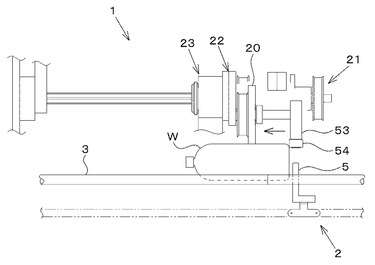
【図5】円柱体の搬入時を示す動作説明図である。
【図6】先行送り爪による送り状態を示す動作説明図である。
【図7】回転位置決めの終了時を示す動作説明図である。
【発明を実施するための形態】
【0012】
以下、本発明の実施の形態を、図面に基づき説明する。
図1乃至図7は、本発明に係る回転位置決め装置1の一実施形態を示している。この回転位置決め装置1は、飲料容器などの円柱体Wを横倒状態にして搬送機構2で移動させつつ、この搬送機構2上で横軸(円柱形の中心)まわりに回転させて回転位置決めを行うように構成されたものである。
【0013】
本発明に係る回転位置決め装置1では、搬送機構2が当該回転位置決め装置1に対して円柱体Wを搬入させたり搬出させたりするための送り爪5とは別に、回転位置決め時に円柱体Wに移動力を付与するための先行送り爪53を備えるものである。
なお、円柱体Wは、アルミニュウム合金やスチール等の金属により形成されたものをはじめ、ペット樹脂等の樹脂により形成されたものとする。また円柱体Wは、全長にわたり同一径に形成されたものだけでなく、一端側を径小に絞って飲み口やスプレー噴射口等を形成させたものや、長手方向の中間を径小にくびれさせたものなどを含むものとして、材質や形状、大きさ、用途等が何ら限定されないものとする。
【0014】
まず、搬送機構2について説明する。
図1及び図4に示すように、搬送機構2は、例えば、円柱体Wにラベルを貼付するためのラベル貼り付け装置(図示略)と、ラベル貼付後の円柱体Wを収縮フィルムにて覆うピロー包装機(図示略)との間などを繋ぐ配置で設置されており、少なくとも回転位置決め装置1が配置される領域では、2本の平行なレール部材3,3を有している。これら2本のレール部材3,3により、横倒させた円柱体Wの外周面をその周方向2箇所で支持するようになっている。
【0015】
2本のレール部材3,3の相互間には、レール方向(長手方向)で互いに所定間隔をおいて複数の送り爪5が設けられている。この送り爪5は、レール部材3,3の下方に架設されたチェン等の伝動手段6により、レール方向に沿って連続的に(間欠停止をしないで)移動される。送り爪5の上端部は、レール部材3に支持される円柱体Wの一端(搬送方向の上流側となる面であり図1の右側)に当接する高さに形成されている。そのため、伝
動手段6が送り爪5を移動させると、送り爪5が円柱体Wの一端に係合して搬送方向の下流側へ押す状態となり、円柱体Wをレール部材3上で滑らすように移動させるものである。
【0016】
各レール部材3は、回転位置決め装置1の稼働領域内(後述する回転ローラ20の移動領域を含む範囲)において、断面円形の芯軸10に対し、そのまわりで筒ローラ11が回転自在に外嵌された構造を有している。
この構造は、回転位置決め装置1が円柱体Wを搬送機構2上で回転させるときの回転抵抗を排除し、且つ、回転駆動を補助するためのもので、筒ローラ11には、その脇方に配置された中継プーリ12との間に歯付きベルト等の伝動手段13が巻き掛けられている。両レール部材3,3に対応して設けられたそれぞれの中継プーリ12,12間には、両者を連動させるように歯付きベルト等の伝動手段14が掛け回されており、これによって両レール部材3,3の筒ローラ11,11には同速、同方向の連動回転が生じるようになっている。
【0017】
次に、回転位置決め装置1について説明する。
回転位置決め装置1は、搬送機構2に対し、レール部材3の筒ローラ11に対応する一方側の脇部に配置された設置フレーム17と、この設置フレーム17内に保持された装置フレーム18とを介して、設置されている。この回転位置決め装置1は、回転ローラ20と、ローラ回転機構21と、ローラ接離機構22と、ローラ移動機構23とを有している。
【0018】
回転ローラ20は、装置フレーム18の内部から搬送機構2上へ突出するように設けられたローラアーム25の先端部に、レール部材3と平行するローラ支軸20aを中心として回転自在に保持されている。そのため、レール部材3で支持された円柱体Wの外周面に対してこの回転ローラ20を当接させた状態にし、且つ回転ローラ20を回転駆動させれば、円柱体Wをレール部材3(筒ローラ11)上で転動させることができる。
【0019】
回転ローラ20は、ローラ外周面にゴムなどの弾性リングを外嵌させるか、又は回転ローラ20自体を弾性材で形成するかして、円柱体Wとの当接時に緩衝効果が得られるようにし、且つ、円柱体Wに対して回転駆動を伝える際のスリップが生じないようにしてある。
ローラ回転機構21は、回転ローラ20を回転駆動するためのもので、図1乃至図4に示すように、ローラアーム25の基部(回転ローラ20の支持側とは反対側の端部)を、レール部材3と平行する方向で貫通するスプライン軸26と、このスプライン軸26に対して軸方向への移動が自在とされながらスプライン軸26の回転時には当該スプライン軸26と一体回転する回転中継プーリ27と、スプライン軸26を回転駆動する回転用モータ28とを有している。
【0020】
回転中継プーリ27は、ローラアーム25の基部との間では相対回転自在な状態に保持されている。また、ローラアーム25の基部に対し、スプライン軸26は単に貫通しているだけであり、スプライン軸26の回転がローラアーム25に伝わることは無い構造となっている。但し、ローラアーム25は、スプライン軸26が通る位置を支点としてそのまわりで揺動自在となっている。そして、回転用モータ28とスプライン軸26との間が、歯付きベルト等の伝動手段30,31によって伝動可能に接続され、また回転中継プーリ27と回転ローラ20との間が、歯付きベルト等の伝動手段32によって伝動可能に接続されている。
【0021】
なお、両レール部材3,3の筒ローラ11,11を同速、同方向に連動回転させるための伝動手段14が巻き掛けられる中間プーリ35と、回転用モータ28との間に歯付きベルト等の伝動手段36を架け渡してある。そのため、回転ローラ20と両レール部材3,3の筒ローラ11,11との間でも、同方向への連動回転が行われるようになっている。回転ローラ20を回転駆動する伝動手段30,31,32と、筒ローラ11を回転駆動する伝動手段14,13,36は、回転ローラ20の周速度と、筒ローラ11の周速度とが一致するように、互いのプーリ外径が相関的に関係付けられている。
【0022】
ローラ接離機構22は、回転ローラ20をレール部材3上の円柱体Wに接離させるため
のもので、スプライン軸26の両端部に設けられた上下方向に長い一対の揺動レバー40,40と、これら揺動レバー40,40の上端部間を連結する連結ロッド41と、両揺動レバー40,40の下端部に当接して回転するカム42,42とを有している。
揺動レバー40,40に対し、スプライン軸26は単に貫通しているだけであり、スプライン軸26の回転が揺動レバー40,40に伝わることは無い構造となっている。但し、揺動レバー40,40は、スプライン軸26が通る位置を支点としてそのまわりで揺動自在となっている。また、図示は省略するが、カム42,42は、それらのカム駆動軸42aが互いに共通する1本の軸として形成されており、このカム駆動軸42aが別途配備されたモータにより回転駆動されることで、各カム42,42から各揺動レバー40,40へ揺動力が同時付与されるようになっている。
【0023】
ローラアーム25の基部には、連結ロッド41を挟持する一対のピンチローラ45,45が、ブラケット46を介して設けられている。これらピンチローラ45,45は、連結ロッド41をガイドにしてローラアーム25を軸方向へ移動自在に保持させながら、揺動レバー40の揺動時には、連結ロッド41がスプライン軸26のまわりで円弧動するのに伴わせて、ローラアーム25をも一緒に円弧動させるようにしてある。
【0024】
すなわち、揺動レバー40の揺動時にはローラアーム25も揺動し、このローラアーム25の揺動に伴って回転ローラ20が上下動するようになる。その結果、この回転ローラ20の上下動により、レール部材3上の円柱体Wに対して回転ローラ20が離合するようになっている。
なお、回転ローラ20は、2本のレール部材3,3上で支持される円柱体Wの外周面に対して、その真上となる位置に当接させるのが好適とされる。すなわち、レール部材3,3上で回転するときの円柱体Wの回転中心と、回転ローラ20の回転中心とが、1本の垂直線上に並ぶように配置するのが、回転ローラ20から円柱体Wへの回転力の伝達効率、及び円柱体Wの載置安定性の両面において好適と言える。
【0025】
ローラ移動機構23は、回転ローラ20を搬送機構2の送り爪5に同調させつつ、レール部材3に沿って移動させるためのもので、ローラアーム25の基部を回転自在に支持する支持部材50と、この支持部材50をレール部材3に沿って移動自在に保持するリニヤガイド機構51と、支持部材50に対して移動駆動を付与する駆動部52とを有している。そして、このローラ移動機構23に対して、先行送り爪53が設けられている。
【0026】
支持部材50に対し、スプライン軸26は単に貫通しているだけであり、スプライン軸26の回転が支持部材50に伝わることは無い構造となっている。図2に示すように、駆動部52は、歯付きベルト等の伝動手段55をモータ(図示略)によって駆動する構成とされている。また、リニヤガイド機構51は、レール部材3に平行に設けられたガイドレール56と、このガイドレール56に移動自在に保持されたスライダ57とを有したものである。
【0027】
先行送り爪53は、ローラアーム25の先端部に設けられた回転ローラ20のローラ支軸20aを、レール部材3の上流方向(図1の右方側)へ延長突出させて、この突出側の先端部に取り付けられている。従って、ローラ移動機構23が回転ローラ20をレール部材3に沿って移動させるときには、この先行送り爪53も回転ローラ20と一体移動するようになる。
【0028】
この先行送り爪53は、レール部材3上に支持された円柱体Wに対して回転ローラ20を当接させたときに、円柱体Wの一端部に対して当接するようになったもので、円柱体Wとの当接部分にはロータ54が設けられている。このロータ54は、上下方向へ向けた回転軸心まわりで回転自在とされたもので(本実施形態ではカムフォロワーを使用)、回転ローラ20によって円柱体Wが回転されるときに、この円柱体Wとの当接部分(搬送方向上流側を向く端面の外周部寄り)を介して転動力を受けて従動回転するようになっている。
【0029】
前記したように、2本のレール部材3,3上で支持される円柱体Wの回転中心と回転ローラ20の回転中心とが、1本の垂直線上に並ぶように配置する場合では、回転ローラ20の回転中心と、先行送り爪53のロータ54の回転軸心とについても、1本の垂直線上
に並ぶようにするのが好適である。
なお、円柱体Wの軸方向(搬送方向)において、ローラ接離機構22により回転ローラ20が当接される位置は、個々の円柱体Wを通じて統一されるようにしてある。このような円柱体Wと回転ローラ20との当接位置関係を前提におくとき、先行送り爪53は、送り爪5よりも先に円柱体Wの一端部に当接するように、ローラ支軸20aに対する先行送り爪53の取付位置が調整されている。
【0030】
次に、回転位置決め装置1の作動について説明する。
搬送機構2が伝動手段6を駆動し、送り爪5を連続的に(間欠停止しないで)移動させることにより、図1に示すように、レール部材3,3上に横倒状態で支持された円柱体Wは、その端部に送り爪5が係合した状態として、レール部材3,3上を移動される。
図5に示すように、回転位置決め装置1への搬入位置に円柱体Wが到達すると、この搬入位置に設けられた下流側センサ60が円柱体Wを検出すると共に、この下流側センサ60に隣接して設けられた上流側センサ61が送り爪5を検出する。これら両方のセンサ60,61が検出信号を出力した時点で、回転位置決め装置1では円柱体Wの確実な搬入を判断する。
【0031】
このようにして回転位置決め装置1に対する円柱体Wの搬入が判断されると、ローラ回転機構21(図4参照)が回転用モータ28を駆動させるようになり、伝動手段30,31,32を介して回転ローラ20が回転を始める。この回転用モータ28の駆動により、伝動手段36,14,13を介してレール部材3の筒ローラ11にも回転駆動が伝わり、これによってレール部材3上に支持された円柱体Wも回転ローラ20と同時に回転を開始する。
【0032】
この状態で、ローラ接離機構22(図3参照)がカム42の回転で揺動レバー40を揺動させるべく駆動を開始し、この揺動レバー40と一体揺動するローラアーム25の揺動で回転ローラ20を下降させる。
このとき、同時にローラ移動機構23(図2参照)が駆動部52を作動させて、回転ローラ20を送り爪5の移動方向と同じ方向へ移動させる。このようなローラ接離機構22による回転ローラ20の下降と、ローラ移動機構23による回転ローラ20の移動とが合成され、回転ローラ20は実質上、図5に矢符Xで示すような斜め下方へ向けた移動を行うようになる。
【0033】
回転ローラ20が斜め下方(図5の矢符X)への移動を行っている間、ローラ移動機構23が回転ローラ20をレール部材3に沿って移動させる速度は、搬送機構2が送り爪5を移動させる速度よりもやや高速となっている。このような速度差により、ローラ移動機構23が備える先行送り爪53は、それまで送り爪5との係合で移動されていた円柱体Wの後方から当該円柱体Wに追いつき、やがて円柱体Wの端部に当接するようになる。
【0034】
ローラ接離機構22による回転ローラ20の下降で、回転ローラ20が円柱体Wの外周面に当接するタイミングと、ローラ移動機構23による回転ローラ20の移動で先行送り爪53が円柱体Wの端部に当接するタイミングとを比較すると、先行送り爪53が円柱体Wの端部に当接するタイミングの方が早くなるように設定されている。
そのため、図6に示すように、回転ローラ20が円柱体Wの外周面に当接する時点では、先行送り爪53が円柱体Wの端部を押して円柱体Wを送り爪5よりも高速で移動させているようになり、結果として、円柱体Wが送り爪5から搬送方向の下流側へ離反した状態となる。すなわち、回転ローラ20による回転駆動が円柱体Wに付与される時点では、既に、円柱体Wと送り爪5とは非当接の状態となっている。
【0035】
先行送り爪53が円柱体Wと当接する部分にロータ54を備えているため、円柱体Wが回転ローラ20の当接を受けて回転し、且つ、円柱体Wが先行送り爪53の当接を受けて移動するときには、円柱体Wの回転を受けてこのロータ54も従動回転し、円柱体Wと先行送り爪53との間に回転抵抗となるような摩擦は生じない。それ故、円柱体Wが異常摩耗を起こすこともなく、摩耗粉が発生することもない。
【0036】
当然に、摩耗粉が発生しないために搬送機構2や回転位置決め装置1の可動部に摩耗粉が付着堆積することもなく、機械部品の異常摩耗や可動不良、各種センサの検出不良、更
には、円柱体Wとしての品質低下に繋がるおそれもない。
なお、先行送り爪53は、回転ローラ20のローラ支軸20aを介してローラアーム25に設けられているため、先行送り爪53と回転ローラ20との距離は常に一定に保たれる。従って、例えば、搬送機構2側において伝動手段6の伸び等を原因として送り爪5の搬送ピッチにズレが生じたような場合でも、先行送り爪53による円柱体Wとの当接(換言すれば円柱体Wと送り爪5とを離反させる作用)は確実に行える利点がある。
【0037】
ローラ移動機構23は、先行送り爪53が円柱体Wに当接した後、先行送り爪53の移動速度(回転ローラ20の移動速度に同じ)を送り爪5の移動速度に合致させるようになっている。このような状態(送り爪5から円柱体Wが前方へ離反した状態)を保持させつつ、図7に示すように、円柱体Wをレール部材3に沿って移動させながら、円柱体Wに貼付されたラベルの位置マーク(特別に付与したマークやバーコード、或いは図柄の中の特定部位など)を検出すべく回転位置決めを行う。この回転位置決めは、従来と同様に、例えば光学センサなどを用いて行えばよい。円柱体Wの回転位置決めが完了した時点でローラ回転機構21は回転ローラ20の回転を停止させる。
【0038】
その後は、ローラ接離機構22による回転ローラ20の上昇(図5の矢符Y参照)、ローラ移動機構23による回転ローラ20の逆向き移動(図5の矢符Z参照)などを行って、回転位置決め装置1としての初期状態に戻り、1サイクル動作を終了する。
本発明は、上記実施形態に限定されるものではなく、実施の形態に応じて適宜変更可能である。
【0039】
例えば、本発明に係る回転位置決め装置1は、設置の前提となる搬送機構2を加えた構成とすることも可能である。この場合、搬送機構2が備える送り爪5に対して先行送り爪53(ロータ54)を設けるようにしてもよい。
送り爪5に対して先行送り爪53を設ける場合において、先行送り爪53は、レール部材3上に支持される円柱体Wの端部に対し、上方寄りの外周位置に当接させる場合に限らず、下方寄りの外周位置に当接させるように配備してもよい。
【0040】
先行送り爪53は、円柱体Wの端部に対し、外周寄りとなる部分に当接するように配備させるだけでなく、円柱体Wの回転中心となる部分に当接するように配備してもよい。この場合、先行送り爪53に設けるロータ54は、円柱体Wの回転軸心まわりで回転自在となる構成とする。
先行送り爪53は、ローラアーム25に専用のブラケットを取り付けて、このブラケットに取り付けるようにしてもよい(ローラアーム25へ設ける場合にロータ支軸20aに取り付けることが限定されるものではない)。
【0041】
ローラ接離機構22により回転ローラ20を下降させる場合に、ローラ移動機構23を不作動にしたまま、先行送り爪53が円柱体Wに係合し得る高さとなるまで、一旦、ローラアーム25を下向きに揺動させ、次に、先行送り爪53が円柱体Wの端部に当接するようにローラ移動機構23を作動させ、その後、再びローラ接離機構22を作動させて、回転ローラ20を円柱体Wの外周面へ当接させるようにしてもよい。
【0042】
回転位置決めを完了した後、ローラ接離機構22による回転ローラ20の上昇(図5の矢符Y参照)を行う前に、ローラ移動機構23において回転ローラ20及び先行送り爪53の移動速度を徐々に遅くするように減速制御し、円柱体Wの端部に送り爪5が衝突しないようにして、静かな当接を行わせ、この当接の後、回転ローラ20及び先行送り爪53の移動速度を送り爪5の移動速度に合致させてから、ローラ接離機構22による回転ローラ20の上昇を行わせるようにするとよい。
【0043】
本発明に係る回転位置決め装置1は、複数本の円柱体Wをセットにして袋詰め又は箱詰めするに際して、各円柱体Wの回転向きを揃えるような場合に、袋詰め又は箱詰めする位置の上流部に設置するものとしてもよい。
【符号の説明】
【0044】
1 回転位置決め装置
2 搬送機構
3 レール部材
5 送り爪
6 伝動手段
10 芯軸
11 筒ローラ
12 中継プーリ
13 伝動手段
14 伝動手段
17 設置フレーム
18 装置フレーム
20 回転ローラ
20a ローラ支軸
21 ローラ回転機構
22 ローラ接離機構
23 ローラ移動機構
25 ローラアーム
26 スプライン軸
27 回転中継プーリ
28 回転用モータ
30 伝動手段
32 伝動手段
35 中間プーリ
36 伝動手段
40 揺動レバー
41 連結ロッド
42 カム
42a カム駆動軸
45 ピンチローラ
46 ブラケット
50 支持部材
51 リニヤガイド機構
52 駆動部
53 先行送り爪
54 ロータ
55 伝動手段
56 ガイドレール
57 スライダ
60 下流側センサ
61 上流側センサ
W 円柱体
【技術分野】
【0001】
本発明は、円柱形をした対象物(以下、単に「円柱体」と言う)を横倒させた状態で回転させ、所定回転角度で停止させるようにした回転位置決め装置に関するものである。
【背景技術】
【0002】
飲料容器などの円柱体に対し、その外周面に貼付されたラベルの絵柄等を基準にして回転向きを揃えようとする場合などに、この円柱体の周方向位置(回転角度)の位置決めが必要になることがある。
従来、この種の位置決めを行うための回転位置決め装置は、円柱体にラベルを貼付するためのラベル貼付装置と、ラベル貼付後の円柱体を収縮フィルムにて覆うピロー包装機との間などで、円柱体を横倒させた状態にして連続搬送する搬送機構と組み合わせて構成されている(例えば、特許文献1,2等参照)。
【0003】
搬送機構は、横倒させた円柱体の外周面をその周方向2箇所で支持するように配置された2本のレール部材と、これら2本のレール部材の相互間でレール方向に沿って移動可能に設けられた送り爪とを有したものとされている。そして、送り爪を円柱体の一端(搬送方向上流側の面)に係合させて、当該円柱体をレール部材上で滑らすように移動させる。
これに対し、回転位置決め装置は、レール部材で支持された円柱体の外周面にその上方から回転ローラを押し付け、回転ローラを回転駆動することで円柱体に転動力(回転力)を付与させ、回転する円柱体から位置マークを検出する構成となっている。この回転ローラは、送り爪に同調してレール方向に移動する。すなわち、円柱体をレール方向に移動させつつ、円柱体を同時に回転させるようになっている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】実開昭54−62283号公報
【特許文献2】特開平4−173616号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
従来の回転位置決め装置では、送り爪を円柱体の一端に係合させた状態のまま、円柱体を移動と同時に回転ローラで回転させ、回転位置決めを行うようにしていたので、円柱体と送り爪との係合部分からは、円柱体又は送り爪を形成している素材(金属や樹脂)の摩耗粉が発生することがあった。
このような摩耗粉は、搬送機構や回転位置決め装置の可動部に付着堆積して機械部品の異常摩耗や可動不良の原因になったり、各種センサの検出部に付着して検出不良の原因になったり、円柱体側に付着して汚損などの品質低下に繋がったりするといった問題があった。
【0006】
本発明は、上記事情に鑑みてなされたものであって、円柱体を移動及び回転させながら回転位置決めを行うに際して、摩耗粉の発生を防止し、摩耗粉を原因としていた各種不具合(装置側の異常摩耗、各種センサの検出不良、円柱体の品質低下など)を防止できるようにした円柱体の回転位置決め装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
前記目的を達成するために、本発明は次の手段を講じた。
即ち、本発明に係る円柱体の回転位置決め装置は、横倒させた円柱体を2本以上のレール部材で支持しつつ円柱体の一端に係合する送り爪で当該円柱体をレール部材に沿って移動させる搬送機構に対して備えられる円柱体の回転位置決め装置において、レール部材で支持された円柱体の外周面に当接して当該円柱体をレール部材上で転動させる方向に回転自在とされた回転ローラと、回転ローラを回転駆動するローラ回転機構と、回転ローラを前記レール部材上の円柱体に接離させるローラ接離機構と、回転ローラを前記送り爪に同調させつつレール部材に沿って移動させるローラ移動機構とを有しており、前記ローラ移動機構には、回転ローラが円柱体に当接するよりも先に円柱体の一端部に当接して円柱体
を送り爪よりも搬送方向の下流側へ離反させる先行送り爪が設けられており、この先行送り爪には、回転ローラで回転される円柱体から転動力を受けて従動回転するロータが設けられていることを特徴とする。
【0008】
前記先行送り爪は、回転ローラを回転自在に保持するローラアームに対して回転ローラのローラ支軸をレール部材の上流方向へ突出させた先端側に取り付けられているのが好ましい。
前記先行送り爪のロータは、回転軸心を上下方向に向けて回転自在に保持されており、回転する外周面を円柱体の端部に後方から当接する構成とするのが好ましい。
【0009】
前記ローラ移動機構は、送り爪によって移動する円柱体の後方から先行送り爪を送り爪より高速で同方向へ移動させて円柱体に当接させ、送り爪から円柱体が離反した後に送り爪の移動速度に先行送り爪の移動速度を合致させる構成とするのが好適である。
【発明の効果】
【0010】
本発明に係る円柱体の回転位置決め装置は、円柱体を移動及び回転させながら回転位置決めを行うに際して、摩耗粉の発生を防止し、摩耗粉を原因としていた各種不具合を防止できるようになる。
【図面の簡単な説明】
【0011】
【図1】本発明に係る回転位置決め装置の一実施形態を示した正面図(図4のA−A線矢視図に相当)である。
【図2】ローラ移動機構を示した背面図(図4のB−B線矢視図に相当)である。
【図3】回転位置決め装置を背面側から示した斜視図である。
【図4】図1のC−C線拡大断面図である。
【図5】円柱体の搬入時を示す動作説明図である。
【図6】先行送り爪による送り状態を示す動作説明図である。
【図7】回転位置決めの終了時を示す動作説明図である。
【発明を実施するための形態】
【0012】
以下、本発明の実施の形態を、図面に基づき説明する。
図1乃至図7は、本発明に係る回転位置決め装置1の一実施形態を示している。この回転位置決め装置1は、飲料容器などの円柱体Wを横倒状態にして搬送機構2で移動させつつ、この搬送機構2上で横軸(円柱形の中心)まわりに回転させて回転位置決めを行うように構成されたものである。
【0013】
本発明に係る回転位置決め装置1では、搬送機構2が当該回転位置決め装置1に対して円柱体Wを搬入させたり搬出させたりするための送り爪5とは別に、回転位置決め時に円柱体Wに移動力を付与するための先行送り爪53を備えるものである。
なお、円柱体Wは、アルミニュウム合金やスチール等の金属により形成されたものをはじめ、ペット樹脂等の樹脂により形成されたものとする。また円柱体Wは、全長にわたり同一径に形成されたものだけでなく、一端側を径小に絞って飲み口やスプレー噴射口等を形成させたものや、長手方向の中間を径小にくびれさせたものなどを含むものとして、材質や形状、大きさ、用途等が何ら限定されないものとする。
【0014】
まず、搬送機構2について説明する。
図1及び図4に示すように、搬送機構2は、例えば、円柱体Wにラベルを貼付するためのラベル貼り付け装置(図示略)と、ラベル貼付後の円柱体Wを収縮フィルムにて覆うピロー包装機(図示略)との間などを繋ぐ配置で設置されており、少なくとも回転位置決め装置1が配置される領域では、2本の平行なレール部材3,3を有している。これら2本のレール部材3,3により、横倒させた円柱体Wの外周面をその周方向2箇所で支持するようになっている。
【0015】
2本のレール部材3,3の相互間には、レール方向(長手方向)で互いに所定間隔をおいて複数の送り爪5が設けられている。この送り爪5は、レール部材3,3の下方に架設されたチェン等の伝動手段6により、レール方向に沿って連続的に(間欠停止をしないで)移動される。送り爪5の上端部は、レール部材3に支持される円柱体Wの一端(搬送方向の上流側となる面であり図1の右側)に当接する高さに形成されている。そのため、伝
動手段6が送り爪5を移動させると、送り爪5が円柱体Wの一端に係合して搬送方向の下流側へ押す状態となり、円柱体Wをレール部材3上で滑らすように移動させるものである。
【0016】
各レール部材3は、回転位置決め装置1の稼働領域内(後述する回転ローラ20の移動領域を含む範囲)において、断面円形の芯軸10に対し、そのまわりで筒ローラ11が回転自在に外嵌された構造を有している。
この構造は、回転位置決め装置1が円柱体Wを搬送機構2上で回転させるときの回転抵抗を排除し、且つ、回転駆動を補助するためのもので、筒ローラ11には、その脇方に配置された中継プーリ12との間に歯付きベルト等の伝動手段13が巻き掛けられている。両レール部材3,3に対応して設けられたそれぞれの中継プーリ12,12間には、両者を連動させるように歯付きベルト等の伝動手段14が掛け回されており、これによって両レール部材3,3の筒ローラ11,11には同速、同方向の連動回転が生じるようになっている。
【0017】
次に、回転位置決め装置1について説明する。
回転位置決め装置1は、搬送機構2に対し、レール部材3の筒ローラ11に対応する一方側の脇部に配置された設置フレーム17と、この設置フレーム17内に保持された装置フレーム18とを介して、設置されている。この回転位置決め装置1は、回転ローラ20と、ローラ回転機構21と、ローラ接離機構22と、ローラ移動機構23とを有している。
【0018】
回転ローラ20は、装置フレーム18の内部から搬送機構2上へ突出するように設けられたローラアーム25の先端部に、レール部材3と平行するローラ支軸20aを中心として回転自在に保持されている。そのため、レール部材3で支持された円柱体Wの外周面に対してこの回転ローラ20を当接させた状態にし、且つ回転ローラ20を回転駆動させれば、円柱体Wをレール部材3(筒ローラ11)上で転動させることができる。
【0019】
回転ローラ20は、ローラ外周面にゴムなどの弾性リングを外嵌させるか、又は回転ローラ20自体を弾性材で形成するかして、円柱体Wとの当接時に緩衝効果が得られるようにし、且つ、円柱体Wに対して回転駆動を伝える際のスリップが生じないようにしてある。
ローラ回転機構21は、回転ローラ20を回転駆動するためのもので、図1乃至図4に示すように、ローラアーム25の基部(回転ローラ20の支持側とは反対側の端部)を、レール部材3と平行する方向で貫通するスプライン軸26と、このスプライン軸26に対して軸方向への移動が自在とされながらスプライン軸26の回転時には当該スプライン軸26と一体回転する回転中継プーリ27と、スプライン軸26を回転駆動する回転用モータ28とを有している。
【0020】
回転中継プーリ27は、ローラアーム25の基部との間では相対回転自在な状態に保持されている。また、ローラアーム25の基部に対し、スプライン軸26は単に貫通しているだけであり、スプライン軸26の回転がローラアーム25に伝わることは無い構造となっている。但し、ローラアーム25は、スプライン軸26が通る位置を支点としてそのまわりで揺動自在となっている。そして、回転用モータ28とスプライン軸26との間が、歯付きベルト等の伝動手段30,31によって伝動可能に接続され、また回転中継プーリ27と回転ローラ20との間が、歯付きベルト等の伝動手段32によって伝動可能に接続されている。
【0021】
なお、両レール部材3,3の筒ローラ11,11を同速、同方向に連動回転させるための伝動手段14が巻き掛けられる中間プーリ35と、回転用モータ28との間に歯付きベルト等の伝動手段36を架け渡してある。そのため、回転ローラ20と両レール部材3,3の筒ローラ11,11との間でも、同方向への連動回転が行われるようになっている。回転ローラ20を回転駆動する伝動手段30,31,32と、筒ローラ11を回転駆動する伝動手段14,13,36は、回転ローラ20の周速度と、筒ローラ11の周速度とが一致するように、互いのプーリ外径が相関的に関係付けられている。
【0022】
ローラ接離機構22は、回転ローラ20をレール部材3上の円柱体Wに接離させるため
のもので、スプライン軸26の両端部に設けられた上下方向に長い一対の揺動レバー40,40と、これら揺動レバー40,40の上端部間を連結する連結ロッド41と、両揺動レバー40,40の下端部に当接して回転するカム42,42とを有している。
揺動レバー40,40に対し、スプライン軸26は単に貫通しているだけであり、スプライン軸26の回転が揺動レバー40,40に伝わることは無い構造となっている。但し、揺動レバー40,40は、スプライン軸26が通る位置を支点としてそのまわりで揺動自在となっている。また、図示は省略するが、カム42,42は、それらのカム駆動軸42aが互いに共通する1本の軸として形成されており、このカム駆動軸42aが別途配備されたモータにより回転駆動されることで、各カム42,42から各揺動レバー40,40へ揺動力が同時付与されるようになっている。
【0023】
ローラアーム25の基部には、連結ロッド41を挟持する一対のピンチローラ45,45が、ブラケット46を介して設けられている。これらピンチローラ45,45は、連結ロッド41をガイドにしてローラアーム25を軸方向へ移動自在に保持させながら、揺動レバー40の揺動時には、連結ロッド41がスプライン軸26のまわりで円弧動するのに伴わせて、ローラアーム25をも一緒に円弧動させるようにしてある。
【0024】
すなわち、揺動レバー40の揺動時にはローラアーム25も揺動し、このローラアーム25の揺動に伴って回転ローラ20が上下動するようになる。その結果、この回転ローラ20の上下動により、レール部材3上の円柱体Wに対して回転ローラ20が離合するようになっている。
なお、回転ローラ20は、2本のレール部材3,3上で支持される円柱体Wの外周面に対して、その真上となる位置に当接させるのが好適とされる。すなわち、レール部材3,3上で回転するときの円柱体Wの回転中心と、回転ローラ20の回転中心とが、1本の垂直線上に並ぶように配置するのが、回転ローラ20から円柱体Wへの回転力の伝達効率、及び円柱体Wの載置安定性の両面において好適と言える。
【0025】
ローラ移動機構23は、回転ローラ20を搬送機構2の送り爪5に同調させつつ、レール部材3に沿って移動させるためのもので、ローラアーム25の基部を回転自在に支持する支持部材50と、この支持部材50をレール部材3に沿って移動自在に保持するリニヤガイド機構51と、支持部材50に対して移動駆動を付与する駆動部52とを有している。そして、このローラ移動機構23に対して、先行送り爪53が設けられている。
【0026】
支持部材50に対し、スプライン軸26は単に貫通しているだけであり、スプライン軸26の回転が支持部材50に伝わることは無い構造となっている。図2に示すように、駆動部52は、歯付きベルト等の伝動手段55をモータ(図示略)によって駆動する構成とされている。また、リニヤガイド機構51は、レール部材3に平行に設けられたガイドレール56と、このガイドレール56に移動自在に保持されたスライダ57とを有したものである。
【0027】
先行送り爪53は、ローラアーム25の先端部に設けられた回転ローラ20のローラ支軸20aを、レール部材3の上流方向(図1の右方側)へ延長突出させて、この突出側の先端部に取り付けられている。従って、ローラ移動機構23が回転ローラ20をレール部材3に沿って移動させるときには、この先行送り爪53も回転ローラ20と一体移動するようになる。
【0028】
この先行送り爪53は、レール部材3上に支持された円柱体Wに対して回転ローラ20を当接させたときに、円柱体Wの一端部に対して当接するようになったもので、円柱体Wとの当接部分にはロータ54が設けられている。このロータ54は、上下方向へ向けた回転軸心まわりで回転自在とされたもので(本実施形態ではカムフォロワーを使用)、回転ローラ20によって円柱体Wが回転されるときに、この円柱体Wとの当接部分(搬送方向上流側を向く端面の外周部寄り)を介して転動力を受けて従動回転するようになっている。
【0029】
前記したように、2本のレール部材3,3上で支持される円柱体Wの回転中心と回転ローラ20の回転中心とが、1本の垂直線上に並ぶように配置する場合では、回転ローラ20の回転中心と、先行送り爪53のロータ54の回転軸心とについても、1本の垂直線上
に並ぶようにするのが好適である。
なお、円柱体Wの軸方向(搬送方向)において、ローラ接離機構22により回転ローラ20が当接される位置は、個々の円柱体Wを通じて統一されるようにしてある。このような円柱体Wと回転ローラ20との当接位置関係を前提におくとき、先行送り爪53は、送り爪5よりも先に円柱体Wの一端部に当接するように、ローラ支軸20aに対する先行送り爪53の取付位置が調整されている。
【0030】
次に、回転位置決め装置1の作動について説明する。
搬送機構2が伝動手段6を駆動し、送り爪5を連続的に(間欠停止しないで)移動させることにより、図1に示すように、レール部材3,3上に横倒状態で支持された円柱体Wは、その端部に送り爪5が係合した状態として、レール部材3,3上を移動される。
図5に示すように、回転位置決め装置1への搬入位置に円柱体Wが到達すると、この搬入位置に設けられた下流側センサ60が円柱体Wを検出すると共に、この下流側センサ60に隣接して設けられた上流側センサ61が送り爪5を検出する。これら両方のセンサ60,61が検出信号を出力した時点で、回転位置決め装置1では円柱体Wの確実な搬入を判断する。
【0031】
このようにして回転位置決め装置1に対する円柱体Wの搬入が判断されると、ローラ回転機構21(図4参照)が回転用モータ28を駆動させるようになり、伝動手段30,31,32を介して回転ローラ20が回転を始める。この回転用モータ28の駆動により、伝動手段36,14,13を介してレール部材3の筒ローラ11にも回転駆動が伝わり、これによってレール部材3上に支持された円柱体Wも回転ローラ20と同時に回転を開始する。
【0032】
この状態で、ローラ接離機構22(図3参照)がカム42の回転で揺動レバー40を揺動させるべく駆動を開始し、この揺動レバー40と一体揺動するローラアーム25の揺動で回転ローラ20を下降させる。
このとき、同時にローラ移動機構23(図2参照)が駆動部52を作動させて、回転ローラ20を送り爪5の移動方向と同じ方向へ移動させる。このようなローラ接離機構22による回転ローラ20の下降と、ローラ移動機構23による回転ローラ20の移動とが合成され、回転ローラ20は実質上、図5に矢符Xで示すような斜め下方へ向けた移動を行うようになる。
【0033】
回転ローラ20が斜め下方(図5の矢符X)への移動を行っている間、ローラ移動機構23が回転ローラ20をレール部材3に沿って移動させる速度は、搬送機構2が送り爪5を移動させる速度よりもやや高速となっている。このような速度差により、ローラ移動機構23が備える先行送り爪53は、それまで送り爪5との係合で移動されていた円柱体Wの後方から当該円柱体Wに追いつき、やがて円柱体Wの端部に当接するようになる。
【0034】
ローラ接離機構22による回転ローラ20の下降で、回転ローラ20が円柱体Wの外周面に当接するタイミングと、ローラ移動機構23による回転ローラ20の移動で先行送り爪53が円柱体Wの端部に当接するタイミングとを比較すると、先行送り爪53が円柱体Wの端部に当接するタイミングの方が早くなるように設定されている。
そのため、図6に示すように、回転ローラ20が円柱体Wの外周面に当接する時点では、先行送り爪53が円柱体Wの端部を押して円柱体Wを送り爪5よりも高速で移動させているようになり、結果として、円柱体Wが送り爪5から搬送方向の下流側へ離反した状態となる。すなわち、回転ローラ20による回転駆動が円柱体Wに付与される時点では、既に、円柱体Wと送り爪5とは非当接の状態となっている。
【0035】
先行送り爪53が円柱体Wと当接する部分にロータ54を備えているため、円柱体Wが回転ローラ20の当接を受けて回転し、且つ、円柱体Wが先行送り爪53の当接を受けて移動するときには、円柱体Wの回転を受けてこのロータ54も従動回転し、円柱体Wと先行送り爪53との間に回転抵抗となるような摩擦は生じない。それ故、円柱体Wが異常摩耗を起こすこともなく、摩耗粉が発生することもない。
【0036】
当然に、摩耗粉が発生しないために搬送機構2や回転位置決め装置1の可動部に摩耗粉が付着堆積することもなく、機械部品の異常摩耗や可動不良、各種センサの検出不良、更
には、円柱体Wとしての品質低下に繋がるおそれもない。
なお、先行送り爪53は、回転ローラ20のローラ支軸20aを介してローラアーム25に設けられているため、先行送り爪53と回転ローラ20との距離は常に一定に保たれる。従って、例えば、搬送機構2側において伝動手段6の伸び等を原因として送り爪5の搬送ピッチにズレが生じたような場合でも、先行送り爪53による円柱体Wとの当接(換言すれば円柱体Wと送り爪5とを離反させる作用)は確実に行える利点がある。
【0037】
ローラ移動機構23は、先行送り爪53が円柱体Wに当接した後、先行送り爪53の移動速度(回転ローラ20の移動速度に同じ)を送り爪5の移動速度に合致させるようになっている。このような状態(送り爪5から円柱体Wが前方へ離反した状態)を保持させつつ、図7に示すように、円柱体Wをレール部材3に沿って移動させながら、円柱体Wに貼付されたラベルの位置マーク(特別に付与したマークやバーコード、或いは図柄の中の特定部位など)を検出すべく回転位置決めを行う。この回転位置決めは、従来と同様に、例えば光学センサなどを用いて行えばよい。円柱体Wの回転位置決めが完了した時点でローラ回転機構21は回転ローラ20の回転を停止させる。
【0038】
その後は、ローラ接離機構22による回転ローラ20の上昇(図5の矢符Y参照)、ローラ移動機構23による回転ローラ20の逆向き移動(図5の矢符Z参照)などを行って、回転位置決め装置1としての初期状態に戻り、1サイクル動作を終了する。
本発明は、上記実施形態に限定されるものではなく、実施の形態に応じて適宜変更可能である。
【0039】
例えば、本発明に係る回転位置決め装置1は、設置の前提となる搬送機構2を加えた構成とすることも可能である。この場合、搬送機構2が備える送り爪5に対して先行送り爪53(ロータ54)を設けるようにしてもよい。
送り爪5に対して先行送り爪53を設ける場合において、先行送り爪53は、レール部材3上に支持される円柱体Wの端部に対し、上方寄りの外周位置に当接させる場合に限らず、下方寄りの外周位置に当接させるように配備してもよい。
【0040】
先行送り爪53は、円柱体Wの端部に対し、外周寄りとなる部分に当接するように配備させるだけでなく、円柱体Wの回転中心となる部分に当接するように配備してもよい。この場合、先行送り爪53に設けるロータ54は、円柱体Wの回転軸心まわりで回転自在となる構成とする。
先行送り爪53は、ローラアーム25に専用のブラケットを取り付けて、このブラケットに取り付けるようにしてもよい(ローラアーム25へ設ける場合にロータ支軸20aに取り付けることが限定されるものではない)。
【0041】
ローラ接離機構22により回転ローラ20を下降させる場合に、ローラ移動機構23を不作動にしたまま、先行送り爪53が円柱体Wに係合し得る高さとなるまで、一旦、ローラアーム25を下向きに揺動させ、次に、先行送り爪53が円柱体Wの端部に当接するようにローラ移動機構23を作動させ、その後、再びローラ接離機構22を作動させて、回転ローラ20を円柱体Wの外周面へ当接させるようにしてもよい。
【0042】
回転位置決めを完了した後、ローラ接離機構22による回転ローラ20の上昇(図5の矢符Y参照)を行う前に、ローラ移動機構23において回転ローラ20及び先行送り爪53の移動速度を徐々に遅くするように減速制御し、円柱体Wの端部に送り爪5が衝突しないようにして、静かな当接を行わせ、この当接の後、回転ローラ20及び先行送り爪53の移動速度を送り爪5の移動速度に合致させてから、ローラ接離機構22による回転ローラ20の上昇を行わせるようにするとよい。
【0043】
本発明に係る回転位置決め装置1は、複数本の円柱体Wをセットにして袋詰め又は箱詰めするに際して、各円柱体Wの回転向きを揃えるような場合に、袋詰め又は箱詰めする位置の上流部に設置するものとしてもよい。
【符号の説明】
【0044】
1 回転位置決め装置
2 搬送機構
3 レール部材
5 送り爪
6 伝動手段
10 芯軸
11 筒ローラ
12 中継プーリ
13 伝動手段
14 伝動手段
17 設置フレーム
18 装置フレーム
20 回転ローラ
20a ローラ支軸
21 ローラ回転機構
22 ローラ接離機構
23 ローラ移動機構
25 ローラアーム
26 スプライン軸
27 回転中継プーリ
28 回転用モータ
30 伝動手段
32 伝動手段
35 中間プーリ
36 伝動手段
40 揺動レバー
41 連結ロッド
42 カム
42a カム駆動軸
45 ピンチローラ
46 ブラケット
50 支持部材
51 リニヤガイド機構
52 駆動部
53 先行送り爪
54 ロータ
55 伝動手段
56 ガイドレール
57 スライダ
60 下流側センサ
61 上流側センサ
W 円柱体
【特許請求の範囲】
【請求項1】
横倒させた円柱体を2本以上のレール部材で支持しつつ円柱体の一端に係合する送り爪で当該円柱体をレール部材に沿って移動させる搬送機構に対して備えられる円柱体の回転位置決め装置において、
レール部材で支持された円柱体の外周面に当接して当該円柱体をレール部材上で転動させる方向に回転自在とされた回転ローラと、
回転ローラを回転駆動するローラ回転機構と、
回転ローラを前記レール部材上の円柱体に接離させるローラ接離機構と、
回転ローラを前記送り爪に同調させつつレール部材に沿って移動させるローラ移動機構とを有しており、
前記ローラ移動機構には、回転ローラが円柱体に当接するよりも先に円柱体の一端部に当接して円柱体を送り爪よりも搬送方向の下流側へ離反させる先行送り爪が設けられており、
この先行送り爪には、回転ローラで回転される円柱体から転動力を受けて従動回転するロータが設けられている
ことを特徴とする円柱体の回転位置決め装置。
【請求項2】
前記先行送り爪は、回転ローラを回転自在に保持するローラアームに対して回転ローラのローラ支軸をレール部材の上流方向へ突出させた先端側に取り付けられていることを特徴とする請求項1記載の円柱体の回転位置決め装置。
【請求項3】
前記先行送り爪のロータは、回転軸心を上下方向に向けて回転自在に保持されており、回転する外周面を円柱体の端部に後方から当接することを特徴とする請求項2記載の円柱体の回転位置決め装置。
【請求項4】
前記ローラ移動機構は、送り爪によって移動する円柱体の後方から先行送り爪を送り爪より高速で同方向へ移動させて円柱体に当接させ、送り爪から円柱体が離反した後に送り爪の移動速度に先行送り爪の移動速度を合致させる構成とされていることを特徴とする請求項1乃至請求項3のいずれかに記載の円柱体の回転位置決め装置。
【請求項1】
横倒させた円柱体を2本以上のレール部材で支持しつつ円柱体の一端に係合する送り爪で当該円柱体をレール部材に沿って移動させる搬送機構に対して備えられる円柱体の回転位置決め装置において、
レール部材で支持された円柱体の外周面に当接して当該円柱体をレール部材上で転動させる方向に回転自在とされた回転ローラと、
回転ローラを回転駆動するローラ回転機構と、
回転ローラを前記レール部材上の円柱体に接離させるローラ接離機構と、
回転ローラを前記送り爪に同調させつつレール部材に沿って移動させるローラ移動機構とを有しており、
前記ローラ移動機構には、回転ローラが円柱体に当接するよりも先に円柱体の一端部に当接して円柱体を送り爪よりも搬送方向の下流側へ離反させる先行送り爪が設けられており、
この先行送り爪には、回転ローラで回転される円柱体から転動力を受けて従動回転するロータが設けられている
ことを特徴とする円柱体の回転位置決め装置。
【請求項2】
前記先行送り爪は、回転ローラを回転自在に保持するローラアームに対して回転ローラのローラ支軸をレール部材の上流方向へ突出させた先端側に取り付けられていることを特徴とする請求項1記載の円柱体の回転位置決め装置。
【請求項3】
前記先行送り爪のロータは、回転軸心を上下方向に向けて回転自在に保持されており、回転する外周面を円柱体の端部に後方から当接することを特徴とする請求項2記載の円柱体の回転位置決め装置。
【請求項4】
前記ローラ移動機構は、送り爪によって移動する円柱体の後方から先行送り爪を送り爪より高速で同方向へ移動させて円柱体に当接させ、送り爪から円柱体が離反した後に送り爪の移動速度に先行送り爪の移動速度を合致させる構成とされていることを特徴とする請求項1乃至請求項3のいずれかに記載の円柱体の回転位置決め装置。
【図1】



【図2】
【図3】

【図4】

【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−1494(P2013−1494A)
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願番号】特願2011−133415(P2011−133415)
【出願日】平成23年6月15日(2011.6.15)
【出願人】(000001339)グンゼ株式会社 (919)
【Fターム(参考)】
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願日】平成23年6月15日(2011.6.15)
【出願人】(000001339)グンゼ株式会社 (919)
【Fターム(参考)】
[ Back to top ]