
冊子プリンタ
【課題】搬送された冊子を適切な方向に補正することが可能な冊子プリンタを提供する。
【解決手段】ページめくり部110は、支持棒104と、支持棒104に圧着されたページめくりローラ100と、前記ページめくりローラ100の表面に曲率を伴って貼り付けられている二次元にわたって表面の圧力分布を検知して把握する層状圧力検知センサ102と、ページめくりモータ106と、支持棒104とページめくりモータ106とをつなぐドライブシャフト571と、から構成され、ページめくり部510は、支持棒504と、支持棒504に圧着されたページめくりローラ500と、前記ページめくりローラ500の表面に曲率を伴って貼り付けられている二次元にわたって表面の圧力分布を検知して把握する層状圧力検知センサ482と、ページめくりモータ580と、支持棒504とページめくりモータ580とをつなぐドライブシャフト574と、から構成されている。
【解決手段】ページめくり部110は、支持棒104と、支持棒104に圧着されたページめくりローラ100と、前記ページめくりローラ100の表面に曲率を伴って貼り付けられている二次元にわたって表面の圧力分布を検知して把握する層状圧力検知センサ102と、ページめくりモータ106と、支持棒104とページめくりモータ106とをつなぐドライブシャフト571と、から構成され、ページめくり部510は、支持棒504と、支持棒504に圧着されたページめくりローラ500と、前記ページめくりローラ500の表面に曲率を伴って貼り付けられている二次元にわたって表面の圧力分布を検知して把握する層状圧力検知センサ482と、ページめくりモータ580と、支持棒504とページめくりモータ580とをつなぐドライブシャフト574と、から構成されている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、銀行等の金融機関で使用される現金自動取引装置ATM(Automated teller machine)や通帳記帳機等の通帳を扱う取引装置、特に、ページめくり機能が必要な自動取引装置で通帳を取り扱う方法に関する。
【背景技術】
【0002】
従来、金融機関で使用される通帳、海外旅行時に必要となる旅券、薬の投薬履歴を記載するいわゆる”お薬帳”等、紙葉類を綴じ合わせて作成した冊子のページめくり技術としては、制御部が冊子の頁部の所望枚数分のめくり動作を行ない、排出する冊子めくり装置などが知られている(例えば、特許文献1)。また、ページめくり部を構成するローラに対して加温・冷却する手段をもうけることによって、前記ローラの硬度を、扱う冊子に応じて、適切に変更することによって、剛性の異なる紙葉から構成された冊子に対応する事例が知られている(例えば、特許文献2)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2003−231378号公報
【特許文献2】特許第4538378号明細書
【発明の開示】
【発明が解決しようとする課題】
【0004】
上記特許文献1に開示された技術では、ページめくりを行うために、冊子を冊子の縦長手方向より数倍長い曲面長を有したドラムに巻き付け、ドラムとページめくりローラとの間で冊子を把持し、ドラムとめくりローラを回転させ、冊子表紙・冊子中紙をめくっているが、冊子表紙・冊子中紙毎に、剛性が異なる事を考慮されていない。
【0005】
また、上記特許文献2に開示された技術では、冊子搬送路に対して垂直に一直線上、複数個にわたって配置されているページめくりローラ対の直下に対して同時に冊子が搬送されない場合、すなわち冊子が傾いてページめくり部に搬送され、前記ページめくりローラの下に停止し、ページめくりローラ対が回転した場合、一方のローラ側が、冊子を構成する表面の紙葉のみを大きくたわませ(大撓みローラ)、前記ローラとは異なるもう一方のローラが、前記冊子表面紙葉をすこしたわませる(小撓みローラ)。このとき前記紙葉は、左右不均一な状態で、前記冊子からはがされる。このようにしてはがされた状態で前記冊子のページをめくるために前記冊子は搬送されるが、大きく紙葉がたわんだ前記大撓みローラ側と小さくたわんだ前記小撓みローラ側の紙葉との間が凸となり上手くめくることができない、もしくは大きくたわんだ紙葉が、塑性変形し、折れ曲がってしまうという問題がある。
【0006】
本発明は、上記に鑑みてなされたものであって、搬送された冊子を適切な方向に補正することが可能な冊子プリンタを提供することを目的とする。
【課題を解決するための手段】
【0007】
上述した課題を解決し、目的を達成するために、本発明にかかる冊子プリンタは、冊子のページに所定の情報を印字する冊子プリンタであって、挿入口から搬送された前記冊子のページの搬送方向に対して垂直方向のうちの一方の部分である第1の部分をめくるための第1のページめくりローラおよび前記第1のページめくりローラを駆動するための第1の駆動モータと、前記第1の部分とは異なる他方の部分である第2の部分をめくるための第2のページめくりローラおよび前記第2のページめくりローラを駆動するための第2の駆動モータと、を有したページめくり機構部と、前記第1のページめくりローラ側に前記冊子が搬送されてきたか否かを検知する第1のセンサと、前記第2のページめくりローラ側に前記冊子が搬送されてきたか否かを検知する第2のセンサと、を有したセンサ機構部と、前記挿入口から前記ページめくり機構部および前記センサ機構部まで前記冊子を搬送する搬送路と、前記第1のセンサまたは前記第2のセンサのいずれかのみが前記冊子を検知した場合に、前記冊子を検知したセンサ側の駆動モータを停止させるとともに前記冊子を検知していないセンサ側の駆動モータのみを駆動させ、前記第1のセンサおよび前記第2のセンサのいずれもが前記冊子を検知すると前記冊子のページをめくるように前記ページめくり機構部の動作を制御する主制御部と、を備えたことを特徴とする。
【発明の効果】
【0008】
本発明によれば、新たなスペースを必要とすることなく、搬送された冊子を適切な方向に補正することが可能な冊子プリンタを提供することができるという効果を奏する。
【図面の簡単な説明】
【0009】
【図1】本発明の実施の形態における冊子プリンタの構成の例を示す図である。
【図2】図1に示した冊子プリンタの機能的な構成を示すブロック図である。
【図3】物理的なページめくり部の構成例を示す図である。
【図4】層状圧力検知センサが冊子を検知する様子を示す図である。
【図5】本実施例におけるページめくり処理の処理手順を示すフローチャートである。
【図6】図5に示した吸入シーケンスの処理手順を示す図である。
【図7】図5に示したページめくり準備シーケンス1の処理手順を示す図である。
【図8】図5に示したページめくり準備シーケンス2の処理手順を示す図である。
【図9A】冊子が傾いて搬送された様子を示す図である。
【図9B】冊子の左右の傾きが解消される様子を示す図である。
【図10A】冊子が傾いて搬送された様子を示す図である(逆側)。
【図10B】冊子の左右の傾きが解消される様子を示す図である(逆側)。
【図11】図5に示したページめくり位置あわせシーケンスの処理手順を示す図である。
【図12】図5に示したページめくりシーケンスの処理手順を示す図である。
【図13A】従来から存在するページめくりローラによって冊子のページがめくられる様子を示す図である(始動時)。
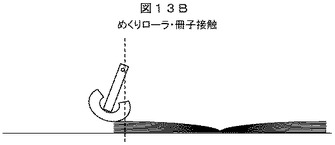
【図13B】従来から存在するページめくりローラによって冊子のページがめくられる様子を示す図である(接触時)。
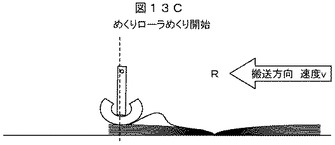
【図13C】従来から存在するページめくりローラによって冊子のページがめくられる様子を示す図である(開始時)。
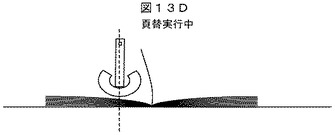
【図13D】従来から存在するページめくりローラによって冊子のページがめくられる様子を示す図である(実行中)。
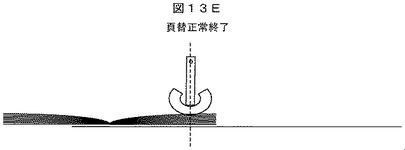
【図13E】従来から存在するページめくりローラによって冊子のページがめくられる様子を示す図である(終了時)。
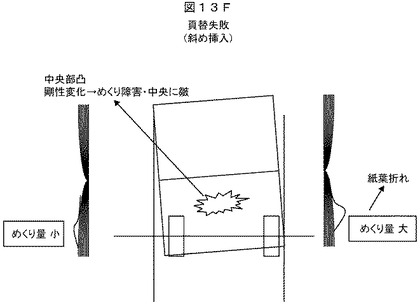
【図13F】従来から存在するページめくりローラによって冊子のページがめくられる様子を示す図である(失敗時)。
【発明を実施するための形態】
【実施例1】
【0010】
以下に添付図面を参照して、本発明にかかる冊子プリンタの実施の形態を詳細に説明する。以下では、本発明にかかる冊子プリンタが、金融機関に採用されている現金自動取引装置(ATM:Automated teller machine)に適用されている場合について説明しているが、冊子の頁をめくる機能を有しているものであれば、特にこれに限定されるものではない。
【0011】
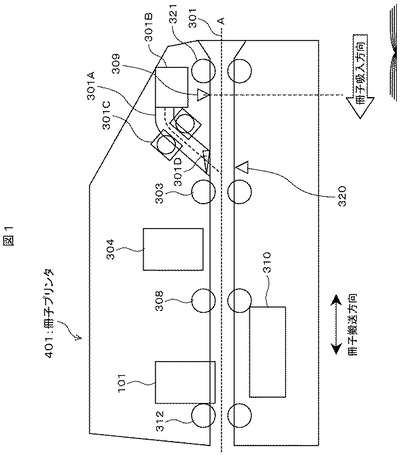
図1は、本発明の実施の形態における冊子プリンタ401の構成の例を示す図である。図1に示すように、冊子プリンタ401は、統合ページめくり部101と、冊子を搬送するための搬送路301と、搬送路301に配置された搬送ローラ対303と搬送ローラ対308と搬送ローラ対312と搬送ローラ対321と、顧客が取り忘れた冊子を回収させるための回収搬送路301Aと、冊子を回収するための回収ボックス301Bと、冊子を回収ボックス301Bに搬送するためのセンサ付き搬送ローラ対301Cと、冊子の搬送路を切り替えるための切り替えゲート301Dと、印字部304と、搬送されてくる冊子を検知するための冊子検知センサ309と冊子検知センサ320と、各種の搬送ローラを駆動させるための搬送モータ310と、を有している。
【0012】
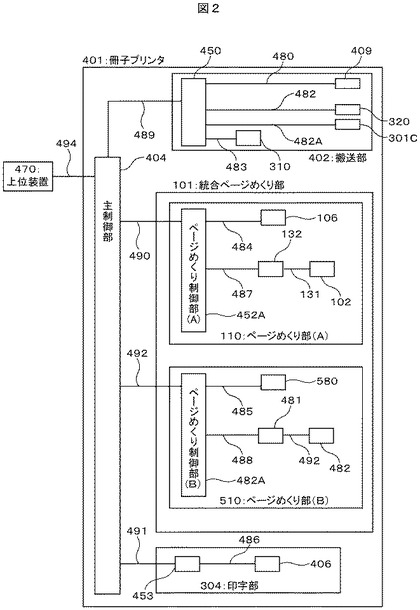
図2は、図1に示した冊子プリンタ401の機能的な構成を示すブロック図である。図2に示すように、冊子プリンタ401は、搬送部402と、統合ページめくり部101と、印字部304と、これらの動作を制御する主制御部404とを有している。
【0013】
前記搬送部402と主制御部404とは信号線489を介して互いに接続され、統合ページめくり部101と主制御部404とは信号線490または信号線492を介して互いに接続され、印字部304と主制御部404とは信号線491を介して互いに接続されている。そして、主制御部404は、上位装置470と信号線494を介して接続される。
【0014】
前記搬送部402の構成としては、図1に示したように、搬送路301上に冊子挿入口A部から順に搬送ローラ対321、冊子検知センサ309、冊子検知センサ320、搬送ローラ対303、搬送ローラ対308、搬送ローラ対312が配置される構成となっている。搬送ローラ対321、搬送ローラ対303、搬送ローラ対308、搬送ローラ対312は、それぞれ搬送モータ310に接続され、搬送モータ310の動力が伝達される。前記搬送モータ310は信号線483を介して搬送制御部450に接続し、前記搬送制御部450の指示に基づき駆動する。冊子検知センサ309、冊子検知センサ320は、それぞれ信号線481、信号線482を介して搬送制御部450に接続している。
【0015】
また、搬送部402は、顧客が取り忘れた冊子を回収するための回収搬送路301Aが、上述した各搬送路から分岐して設けられ、その搬送路上に搬送される冊子を検知して回収ボックス301Bに回収させるためのセンサ付き搬送ローラ対301Cが配置されている。センサ付き搬送ローラ対301Cは、信号線482Aを介して搬送制御部450に接続する。また、センサ付き搬送ローラ対301Cは、上述した各種の搬送ローラと同様に、搬送モータ310に接続される。
【0016】
統合ページめくり部101は、冊子の搬送方向に対して頁の左側をめくるためのページめくり部110と、冊子の搬送方向に対して頁の右側をめくるためのページめくり部510と、を有している。
【0017】
ページめくり部110は、冊子のページをめくるためのページめくりモータ106と、層状圧力検知センサ102の動作を制御する層状圧力検知制御部132と、搬送方向から搬送されてくる冊子のページからの圧力を検知する層状圧力検知センサ102と、これらの動作を制御するページめくり制御部452Aと、を有している。
【0018】
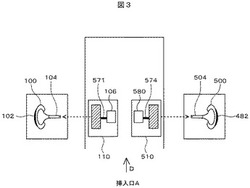
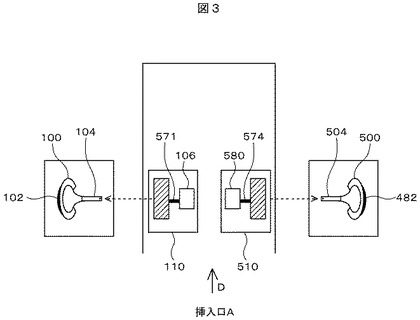
ページめくり部110は、物理的には、図3に示すように、冊子搬送方向(D方向)と垂直な回転軸を有した支持棒104と、支持棒104に圧着されたページめくりローラ100と、前記ページめくりローラ100の表面に曲率を伴って貼り付けられている二次元にわたって表面の圧力分布を検知して把握する層状圧力検知センサ102と、ページめくりモータ106と、支持棒104とページめくりモータ106とをつなぐドライブシャフト571と、から構成されている。
【0019】
なお、図2に示したように、層状圧力検知センサ102と層状圧力検知制御部132とは信号線群131を介して接続され、層状圧力検知制御部132とページめくり制御部452Aとは信号線487を介して接続され、ページめくりモータ106とページめくり制御部452Aとは信号線484を介して接続され、これらの信号線を介して、ページめくりモータ106の駆動・停止指示、あるいは層状圧力検知センサ102の検知情報等の各種の情報が受け渡されている。
【0020】
ページめくり部510は、ページめくり部110と同様に、冊子のページをめくるためのページめくりモータ580と、層状圧力検知センサ482の動作を制御する層状圧力検知制御部481と、搬送方向(図3に示したD方向)から搬送されてくる冊子のページからの圧力を検知する層状圧力検知センサ482と、これらの動作を制御するページめくり制御部482Aと、を有している。
【0021】
ページめくり部510は、ページめくり部110と同様に、物理的には、図3に示すように、冊子搬送方向(D方向)と垂直な回転軸を有した支持棒504と、支持棒504に圧着されたページめくりローラ500と、前記ページめくりローラ500の表面に曲率を伴って貼り付けられている二次元にわたって表面の圧力分布を検知して把握する層状圧力検知センサ482と、ページめくりモータ580と、支持棒504とページめくりモータ580とをつなぐドライブシャフト574と、から構成されている。
【0022】
なお、図2に示したように、層状圧力検知センサ482と層状圧力検知制御部481とは、信号線群492を介して接続され、層状圧力検知制御部481とページめくり制御部482Aとは信号線488を介して接続され、ページめくりモータ580とページめくり制御部482Aとは信号線485を介して接続され、これらの信号線を介して、ページめくりモータ580の駆動・停止指示、あるいは層状圧力検知センサ482の検知情報等の各種の情報が受け渡されている。このようにして、ページめくり部110とページめくり部510とは、一体化され、統合ページめくり部101として図1に示した搬送路301上に配置されている。
【0023】
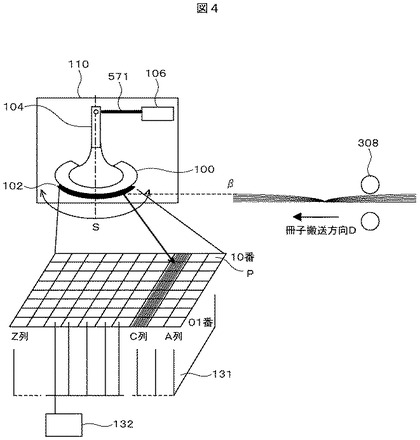
続いて、上述した層状圧力検知センサ102が冊子を検知する仕組みについて説明する。図4は、層状圧力検知センサ102が冊子を検知する様子を示す図である。図4では、冊子搬送方向Dからページが開いた状態で冊子が搬送されてきているものとする。このとき、ページめくりローラ100は、支持棒104を支点として、振り子のようにS方向に回転し、冊子のページをめくる構成となっている。
【0024】
層状圧力検知センサ102は、ページの厚さより小さな大きさの層状の圧力検知素子Pを格子状または短冊状に配列したものである(本実施例では反応の良い感圧導電ゴムを使用している)。個々の圧力検知素子Pは、自身の素子にかかる圧力が、不図示のメモリ等に予め定めておいた閾値以上となったか否かを、信号線群131を介して層状圧力検知制御部132に報告する。
【0025】
たとえば、冊子搬送方向Dの方向から冊子が搬送され、冊子上縁部βがC列近傍に接触した場合、C列近傍の圧力検知素子Pが連続的に圧力を検知する。そして、層状圧力検知制御部132は、C列近傍の圧力検知素子Pからの報告を受けて冊子を検知した判断し、信号線487を介してページめくり制御部452Aに対して、搬送された冊子を検知した旨を報告する仕組みづくりがされている。なお、図4では、ページめくり部110を例に説明しているが、ページめくり部510もこれと同様の仕組みづくりがされている。また、本実施例では、二つの層状圧力検知センサを使った例を述べているが、それ以上の層状圧力検知センサを使用しても良いことはもちろんである。
【0026】
印字部304は、ページに字形を現像する印字ヘッド406と、印字ヘッド406の動作を制御する印字制御部453とを有し、これらが互いに信号線486を介して接続されている。続いて、本実施例におけるページめくり処理について説明する。
【0027】
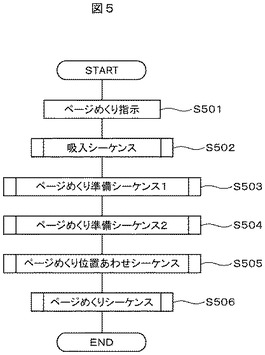
図5は、本実施例におけるページめくり処理の処理手順を示すフローチャートである。図5に示すように、主制御部404は、冊子プリンタ401に接続されている上位装置470から信号線494を介して頁替指示を受けると(ステップS501)、搬送制御部450に対し、吸入シーケンスの実行を指示する(ステップS502)。
【0028】
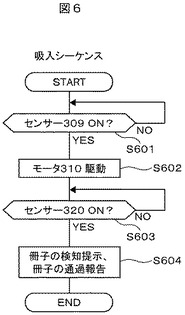
図6は、図5に示した吸入シーケンスの処理手順を示す図である。図6に示すように、主制御部404から吸入シーケンスの実行指示を受けると、搬送制御部450は、センサ309を監視してON状態であるか否かを判定し(ステップS601)、冊子が挿入されてセンサ309がON状態でないと判定した場合(ステップS601;No)、そのまま待機する。一方、搬送制御部450は、冊子が挿入されてセンサ309がON状態であると判定した場合(ステップS601;Yes)、搬送モータ310を吸入方向に駆動させる(S602)。すると、搬送ローラ対321が冊子を把持し、冊子が搬送方向に搬送される。
【0029】
そして、搬送制御部450は、冊子検知センサ320がON状態であるか否かを判定し(ステップS603)、冊子検知センサ320がON状態でないと判定した場合(ステップS603;No)、そのまま待機する。一方、搬送制御部450は、冊子検知センサ320がON状態であると判定した場合(ステップS603;Yes)、層状圧力検知制御部132に対して冊子検知センサ320に冊子上縁部βを検知させる指示を行い、冊子検知センサ320を冊子が通過した旨を、主制御部404に対して報告する(ステップS604)。このステップS604の処理が終了すると、図6に示した吸入シーケンスの全ての処理が終了する。図5に戻り、ステップS503以降の処理について説明する。
【0030】
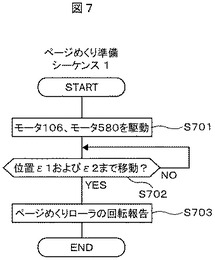
ステップS502において吸入シーケンスの処理が終了すると、続いて、主制御部404は、ページめくり準備シーケンス1を行うように、統合ページめくり部101に対して指示する(ステップS503)。図7は、図5に示したページめくり準備シーケンス1の処理手順を示す図である。
【0031】
図7に示すように、統合ページめくり部101は、ページめくり制御部452Aおよびページめくり制御部482Aに対して、それぞれページめくりモータ106およびページめくりモータ580モータの駆動を指示する(ステップS701)。そして、統合ページめくり部101は、不図示のメモリ等にあらかじめ定められた冊子の最薄厚を検知する位置(冊子の搬送方向に対して頁の左側の厚さを検知する位置ε1、および冊子の搬送方向に対して頁の右側の厚さを検知する位置ε2。ε1およびε2についてはいずれも後述。)までページめくりローラ100およびページめくりローラ500を回転させたか否かを判定し(ステップS702)、これらの位置までページめくりローラ100およびページめくりローラ500を回転させていないと判定した場合(ステップS702;No)、そのまま待機する。
【0032】
一方、統合ページめくり部101は、これらの位置までページめくりローラ100およびページめくりローラ500を回転させたと判定した場合(ステップS702;Yes)、主制御部404に対してその旨を報告する(ステップS703)。このステップS703の処理が終了すると、図7に示したページめくり準備シーケンス1の全ての処理が終了する。図5に戻り、ステップS504以降の処理について説明する。
【0033】
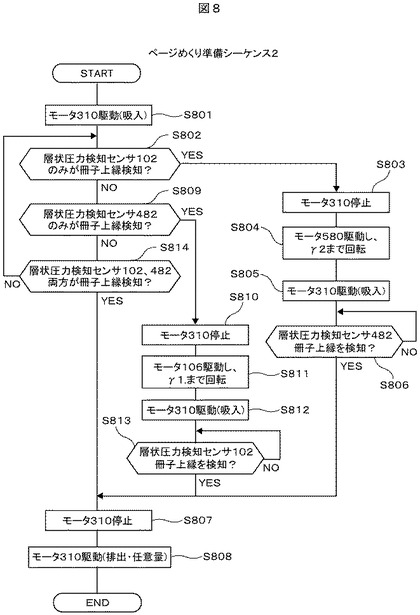
ステップS503においてページめくり準備シーケンス1の処理が終了すると、続いて、主制御部404は、ページめくり準備シーケンス2を行うように、搬送制御部450に対して指示する(ステップS504)。図8は、図5に示したページめくり準備シーケンス2の処理手順を示す図である。
【0034】
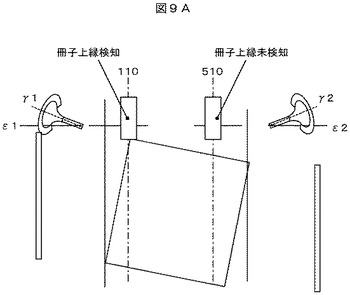
図8に示すように、主制御部404は、搬送制御部450に対して搬送モータ310を駆動するように指示する(ステップS801)。そして、主制御部404は、統合ページめくり部101が、層状圧力検知制御部132からのみ層状圧力検知センサ102が冊子上縁部βを検知した旨を報告されているか否かを判定し(ステップS802)、層状圧力検知制御部132からのみ層状圧力検知センサ102が冊子上縁部βを検知した旨を報告されていると判定した場合(ステップS802;Yes)、図9Aに示すように冊子が傾いて搬送されたと識別し、以降の処理で冊子の揃え動作を行う。
【0035】
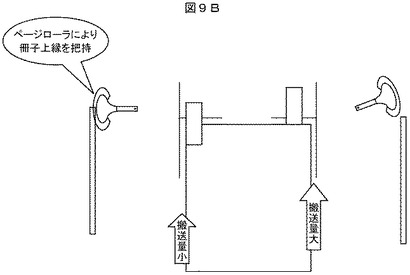
具体的には、主制御部404は、搬送制御部450に対して、冊子の搬送停止を指示し(ステップS803)、統合ページめくり部101に対して、ページめくり制御部482Aが制御するページめくりモータ580を駆動してページめくりローラ500がγ2まで回転するように指示する(ステップS804)。そして、主制御部404は、搬送制御部450に対し、搬送モータ310を駆動して吸入方向に冊子を搬送するように指示する(ステップS805)。このとき、図9Bに示すように、ページめくり部110のページめくり制御部452Aが制御するページめくりモータ106の駆動を停止させることにより、冊子のページのうち搬送方向に対して左側の部分の搬送が停止し、相対的に冊子の搬送方向に対して右側にあるページめくりモータ580側の搬送速度(および搬送量)が大きくなり、冊子の左右の傾きが解消される。
【0036】
そして、主制御部404は、ページめくり部510のページめくり制御部482Aが、層状圧力検知センサ482から冊子上縁部βを検知した旨の報告を受けたか否かを判定し(ステップS806)、層状圧力検知センサ482から冊子上縁部βを検知した旨の報告を受けていないと判定した場合(ステップS806;No)、そのまま待機する。
【0037】
一方、主制御部404は、ページめくり部510のページめくり制御部482Aが、層状圧力検知センサ482から冊子上縁部βを検知した旨の報告を受けたと判定した場合(ステップS806;Yes)、搬送制御部450に対して、搬送モータ310を一旦停止させるように指示し(ステップS807)、その後、冊子の傾きが解消されたと判断して、搬送制御部450に対して、搬送モータ310を駆動させるように指示し、冊子を所定の量だけ搬送させ、排出するように指示する(ステップS808)。
【0038】
ステップS802において、主制御部404は、統合ページめくり部101が、層状圧力検知制御部132からのみ層状圧力検知センサ102が冊子上縁部βを検知した旨を報告されていないと判定した場合(ステップS802;No)、さらに、統合ページめくり部101が、層状圧力検知制御部481からのみ層状圧力検知センサ482が冊子上縁部βを検知した旨を報告されているか否かを判定する(ステップS809)。
【0039】
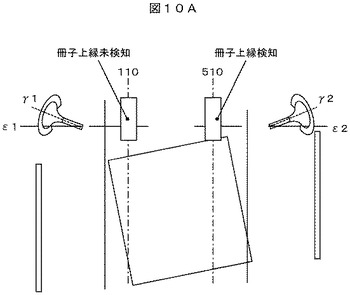
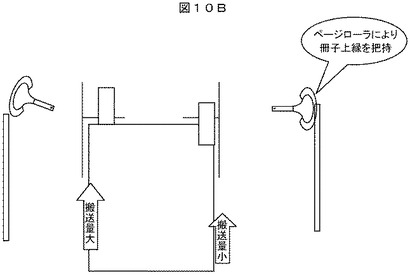
そして、主制御部404は、統合ページめくり部101が、層状圧力検知制御部481からのみ層状圧力検知センサ482が冊子上縁部βを検知した旨を報告されていると判定した場合(ステップS809;Yes)、図10Aに示すように冊子が傾いて搬送されたと識別し、以降の処理で冊子の揃え動作を行う。
【0040】
具体的には、主制御部404は、搬送制御部450に対して、冊子の搬送停止を指示し(ステップS810)、統合ページめくり部101に対して、ページめくり制御部452Aが制御するページめくりモータ106を駆動して、ページめくりローラ100がγ1まで回転するように指示する(ステップS811)。そして、主制御部404は、搬送制御部450に対し、搬送モータ310を駆動して吸入方向に冊子を搬送するように指示する(ステップS812)。このとき、図10Bに示すように、ページめくり部510のページめくり制御部482Aが制御するページめくりモータ580の駆動を停止させることにより、冊子のページのうち搬送方向に対して右側の部分の搬送が停止し、相対的に冊子の搬送方向に対して左側にあるページめくりモータ106側の搬送速度(および搬送量)が大きくなり、冊子の左右の傾きが解消される。
【0041】
そして、主制御部404は、ページめくり部110のページめくり制御部452Aが、層状圧力検知センサ102から冊子上縁部βを検知した旨の報告を受けたか否かを判定し(ステップS813)、層状圧力検知センサ102から冊子上縁部βを検知した旨の報告を受けていないと判定した場合(ステップS813;No)、そのまま待機する。
【0042】
一方、主制御部404は、ページめくり部110のページめくり制御部452Aが、層状圧力検知センサ102から冊子上縁部βを検知した旨の報告を受けたと判定した場合(ステップS813;Yes)、搬送制御部450に対して、搬送モータ310を一旦停止させるように指示し(ステップS807)、その後、冊子の傾きが解消されたと判断して、搬送制御部450に対して、搬送モータ310を駆動させるように指示し、冊子を所定の量だけ搬送させ、排出するように指示する(ステップS808)。
【0043】
ステップS809において、主制御部404は、統合ページめくり部101が、層状圧力検知制御部481からのみ層状圧力検知センサ482が冊子上縁部βを検知した旨を報告されていないと判定した場合(ステップS809;No)、さらに、統合ページめくり部101が、層状圧力検知制御部132および層状圧力検知制御部481から、それぞれ層状圧力検知センサ102が冊子上縁部βを検知した旨および層状圧力検知センサ482が冊子上縁部βを検知した旨を報告されているか否かを判定し(ステップS814)、これらの両方から冊子上縁部βを検知した旨を報告されていないと判定した場合(ステップS814;No)、ステップS802に戻って、以降の各処理を繰り返し行う。
【0044】
一方、主制御部404は、統合ページめくり部101が、これらの両方から冊子上縁部βを検知した旨を報告されている(例えば、これらの両方から同時に報告されている)と判定した場合(ステップS814;Yes)、冊子が左右のどちらにも傾かずに、統合ページめくり部101の下部に搬送されたと判断し、搬送制御部450に対して、搬送モータ310を一旦停止させるように指示し(ステップS807)、その後、冊子の傾きはないと判断して、搬送制御部450に対して、搬送モータ310を駆動させるように指示し、冊子を所定の量だけ搬送させ、排出するように指示する(ステップS808)。このステップS808の処理が終了すると、図8に示したページめくり準備シーケンス2の全ての処理が終了する。図5に戻り、ステップS505以降の処理について説明する。
【0045】
ステップS504においてページめくり準備シーケンス2の処理が終了すると、続いて、主制御部404は、冊子上縁部βが、搬送方向に対して垂直になったと判断し、ページめくり位置あわせシーケンスを行うように、統合ページめくり部101に対して指示する(ステップS505)。図11は、図5に示したページめくり位置あわせシーケンスの処理手順を示す図である。
【0046】
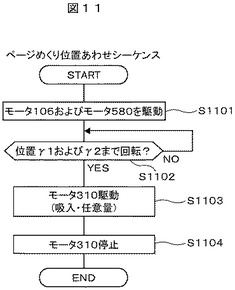
図11に示すように、主制御部404は、統合ページめくり部101に対して、ページめくりモータ106およびページめくりモータ580を駆動するように指示し(ステップS1101)、吸入方向に搬送されてくる冊子上縁部βが、上下の振幅(搬送方向およびページ面に垂直なZ軸方向)をもって自励振動を起こして、紙詰まりをおこさないように、振幅を押さえるが搬送を妨げない位置(例えば、図9Aまたは図10Aに示した位置γ1およびγ2までページめくりローラ100およびページめくりローラ500が回転するように指示し、各ページめくりローラが位置γ1およびγ2まで回転したか否かを判定し(ステップS1102)、これらの位置まで回転していないと判定した場合(ステップS1102;No)、そのまま待機する。
【0047】
一方、主制御部404は、各ページめくりローラが位置γ1およびγ2まで回転したと判定した場合(ステップS1102;Yes)、搬送制御部450に対して搬送モータ310を駆動させて冊子の搬送を開始させ(ステップS1103)、冊子が吸入されて所定の量だけ搬送されると、その後搬送モータ310を停止する指示をする(ステップS1104)。このステップS1104の処理が終了すると、図11に示したページめくり位置あわせシーケンスの全ての処理が終了する。図5に戻り、ステップS506以降の処理について説明する。
【0048】
ステップS505においてページめくり位置あわせシーケンスの処理が終了すると、続いて、主制御部404は、冊子のページめくりの準備が完了したと判断し、ページめくりシーケンスを行うように、統合ページめくり部101に対して指示する(ステップS506)。図12は、図5に示したページめくりシーケンスの処理手順を示す図である。
【0049】
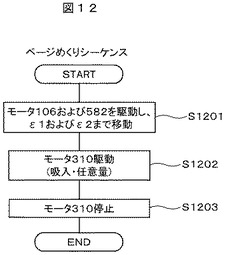
図12に示すように、主制御部404は、統合ページめくり部101に対して、ページめくりモータ106およびページめくりモータ580を駆動するように指示し、冊子をε1およびε2の位置まで移動させ(ステップS1201)、その後、ページめくりローラ100およびページめくりローラ500を回転させて冊子表面のページをたわませたのち、搬送制御部450に対して、冊子の吸入方向に搬送モータ310を駆動してページ替するように指示し(ステップS1202)、搬送モータ310の停止を指示する(ステップS1203)。このステップS1203の処理が終了すると、図12に示したページめくりシーケンスの全ての処理が終了し、図5に示したページめくり処理の全ての処理が終了する。
【0050】
このような動作原理により、搬送路に対して斜めに搬送された冊子を適切な方向に補正している。また、検知機能をページめくりローラの内部に加えたことにより、外部に冊子が斜めに搬送されていることを検知するセンサ等を備えなくても、冊子の斜め搬送の補正機能を有したページめくり装置の提供が可能となる。
【0051】
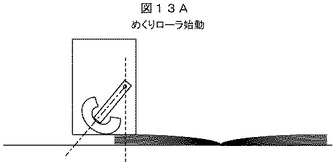
従って、図13A〜13Fに示すように、従来から存在するページめくりローラとめくられる冊子のページとの摩擦力によりページをめくる機構においては(図13A)、ページめくりローラを紙葉の任意の位置に搬送し(図13B)、複数のページめくりローラを回転させてページをたわませた状態で冊子を搬送し、ページをめくった場合において(図13C〜13E)、ページめくりローラの回転軸に冊子上縁が平行でなく斜めに搬送されてきた冊子のページに対して、複数のめくりローラが作り出すたわみ量が不均一になることによる、ページの端面の折れ曲がりや、中央部に皺より(図13F)などの問題を生じさせてしまうことがなくなる。
【0052】
また、本実施例における冊子プリンタ401は、図1に示したように、回収搬送路301Aと、回収ボックス301Bと、センサ付き搬送ローラ対301Cと、切り替えゲート301Dとを有しており、例えば、主制御部404が、顧客が取引を行った後に所定の時間が経過しても未だ冊子検知センサ309が冊子を検知していると判定した場合には、主制御部404は、切り替えゲート301Dを回収搬送路301Aの方向に切り替えて各搬送ローラ対を駆動させ、冊子を一旦吸入した後に、回収搬送路301Aの方向に搬送させる。すると、センサ付き搬送ローラ対301Cが搬送されてきた冊子を検知し、その後、センサ付き搬送ローラ対301Cが駆動して、冊子が回収ボックス301Bに回収される。
【0053】
主制御部404は、このような動作を行わせるので、顧客が冊子を取り忘れた場合であっても、次の取引が実行される際に誤って冊子が排出されてしまうことがなくなる。また、センサ付き搬送ローラ対301Cは、冊子を検知するセンサと搬送ローラ対とが一体となって設けられているので、冊子プリンタ401の内部のスペースが少ない場合であっても、そのスペースを有効に活用して冊子を回収することが可能となっている。
【0054】
なお、本実施例では、挿入口が一つの冊子プリンタについて述べているが、二つの挿入口があり、印字部304の挿入口側で搬送路が統合されるところの金融機関窓口で使用される通帳プリンタも同様である。
【産業上の利用可能性】
【0055】
本発明は、銀行等の金融機関で使用される現金自動取引装置や通帳記帳機等の通帳を扱う取引装置、その自動取引装置で有用である。
【符号の説明】
【0056】
401 冊子プリンタ
101 統合ページめくり部
301 搬送路
303、308、312、321 搬送ローラ対
301A 回収搬送路
301B 回収ボックス
301C センサ付き搬送ローラ対
301D 切り替えゲート
304 印字部
309、320 冊子検知センサ
310 搬送モータ
402 搬送部
404 主制御部
470 上位装置
450 搬送制御部
110、510 ページめくり部
106、580 ページめくりモータ
102、482 層状圧力検知センサ
132、481 層状圧力検知制御部
102、482 層状圧力検知センサ
452A、482A ページめくり制御部
104、504 支持棒
100、500 ページめくりローラ
571、574 ドライブシャフト。
【技術分野】
【0001】
本発明は、銀行等の金融機関で使用される現金自動取引装置ATM(Automated teller machine)や通帳記帳機等の通帳を扱う取引装置、特に、ページめくり機能が必要な自動取引装置で通帳を取り扱う方法に関する。
【背景技術】
【0002】
従来、金融機関で使用される通帳、海外旅行時に必要となる旅券、薬の投薬履歴を記載するいわゆる”お薬帳”等、紙葉類を綴じ合わせて作成した冊子のページめくり技術としては、制御部が冊子の頁部の所望枚数分のめくり動作を行ない、排出する冊子めくり装置などが知られている(例えば、特許文献1)。また、ページめくり部を構成するローラに対して加温・冷却する手段をもうけることによって、前記ローラの硬度を、扱う冊子に応じて、適切に変更することによって、剛性の異なる紙葉から構成された冊子に対応する事例が知られている(例えば、特許文献2)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2003−231378号公報
【特許文献2】特許第4538378号明細書
【発明の開示】
【発明が解決しようとする課題】
【0004】
上記特許文献1に開示された技術では、ページめくりを行うために、冊子を冊子の縦長手方向より数倍長い曲面長を有したドラムに巻き付け、ドラムとページめくりローラとの間で冊子を把持し、ドラムとめくりローラを回転させ、冊子表紙・冊子中紙をめくっているが、冊子表紙・冊子中紙毎に、剛性が異なる事を考慮されていない。
【0005】
また、上記特許文献2に開示された技術では、冊子搬送路に対して垂直に一直線上、複数個にわたって配置されているページめくりローラ対の直下に対して同時に冊子が搬送されない場合、すなわち冊子が傾いてページめくり部に搬送され、前記ページめくりローラの下に停止し、ページめくりローラ対が回転した場合、一方のローラ側が、冊子を構成する表面の紙葉のみを大きくたわませ(大撓みローラ)、前記ローラとは異なるもう一方のローラが、前記冊子表面紙葉をすこしたわませる(小撓みローラ)。このとき前記紙葉は、左右不均一な状態で、前記冊子からはがされる。このようにしてはがされた状態で前記冊子のページをめくるために前記冊子は搬送されるが、大きく紙葉がたわんだ前記大撓みローラ側と小さくたわんだ前記小撓みローラ側の紙葉との間が凸となり上手くめくることができない、もしくは大きくたわんだ紙葉が、塑性変形し、折れ曲がってしまうという問題がある。
【0006】
本発明は、上記に鑑みてなされたものであって、搬送された冊子を適切な方向に補正することが可能な冊子プリンタを提供することを目的とする。
【課題を解決するための手段】
【0007】
上述した課題を解決し、目的を達成するために、本発明にかかる冊子プリンタは、冊子のページに所定の情報を印字する冊子プリンタであって、挿入口から搬送された前記冊子のページの搬送方向に対して垂直方向のうちの一方の部分である第1の部分をめくるための第1のページめくりローラおよび前記第1のページめくりローラを駆動するための第1の駆動モータと、前記第1の部分とは異なる他方の部分である第2の部分をめくるための第2のページめくりローラおよび前記第2のページめくりローラを駆動するための第2の駆動モータと、を有したページめくり機構部と、前記第1のページめくりローラ側に前記冊子が搬送されてきたか否かを検知する第1のセンサと、前記第2のページめくりローラ側に前記冊子が搬送されてきたか否かを検知する第2のセンサと、を有したセンサ機構部と、前記挿入口から前記ページめくり機構部および前記センサ機構部まで前記冊子を搬送する搬送路と、前記第1のセンサまたは前記第2のセンサのいずれかのみが前記冊子を検知した場合に、前記冊子を検知したセンサ側の駆動モータを停止させるとともに前記冊子を検知していないセンサ側の駆動モータのみを駆動させ、前記第1のセンサおよび前記第2のセンサのいずれもが前記冊子を検知すると前記冊子のページをめくるように前記ページめくり機構部の動作を制御する主制御部と、を備えたことを特徴とする。
【発明の効果】
【0008】
本発明によれば、新たなスペースを必要とすることなく、搬送された冊子を適切な方向に補正することが可能な冊子プリンタを提供することができるという効果を奏する。
【図面の簡単な説明】
【0009】
【図1】本発明の実施の形態における冊子プリンタの構成の例を示す図である。
【図2】図1に示した冊子プリンタの機能的な構成を示すブロック図である。
【図3】物理的なページめくり部の構成例を示す図である。
【図4】層状圧力検知センサが冊子を検知する様子を示す図である。
【図5】本実施例におけるページめくり処理の処理手順を示すフローチャートである。
【図6】図5に示した吸入シーケンスの処理手順を示す図である。
【図7】図5に示したページめくり準備シーケンス1の処理手順を示す図である。
【図8】図5に示したページめくり準備シーケンス2の処理手順を示す図である。
【図9A】冊子が傾いて搬送された様子を示す図である。
【図9B】冊子の左右の傾きが解消される様子を示す図である。
【図10A】冊子が傾いて搬送された様子を示す図である(逆側)。
【図10B】冊子の左右の傾きが解消される様子を示す図である(逆側)。
【図11】図5に示したページめくり位置あわせシーケンスの処理手順を示す図である。
【図12】図5に示したページめくりシーケンスの処理手順を示す図である。
【図13A】従来から存在するページめくりローラによって冊子のページがめくられる様子を示す図である(始動時)。
【図13B】従来から存在するページめくりローラによって冊子のページがめくられる様子を示す図である(接触時)。
【図13C】従来から存在するページめくりローラによって冊子のページがめくられる様子を示す図である(開始時)。
【図13D】従来から存在するページめくりローラによって冊子のページがめくられる様子を示す図である(実行中)。
【図13E】従来から存在するページめくりローラによって冊子のページがめくられる様子を示す図である(終了時)。
【図13F】従来から存在するページめくりローラによって冊子のページがめくられる様子を示す図である(失敗時)。
【発明を実施するための形態】
【実施例1】
【0010】
以下に添付図面を参照して、本発明にかかる冊子プリンタの実施の形態を詳細に説明する。以下では、本発明にかかる冊子プリンタが、金融機関に採用されている現金自動取引装置(ATM:Automated teller machine)に適用されている場合について説明しているが、冊子の頁をめくる機能を有しているものであれば、特にこれに限定されるものではない。
【0011】
図1は、本発明の実施の形態における冊子プリンタ401の構成の例を示す図である。図1に示すように、冊子プリンタ401は、統合ページめくり部101と、冊子を搬送するための搬送路301と、搬送路301に配置された搬送ローラ対303と搬送ローラ対308と搬送ローラ対312と搬送ローラ対321と、顧客が取り忘れた冊子を回収させるための回収搬送路301Aと、冊子を回収するための回収ボックス301Bと、冊子を回収ボックス301Bに搬送するためのセンサ付き搬送ローラ対301Cと、冊子の搬送路を切り替えるための切り替えゲート301Dと、印字部304と、搬送されてくる冊子を検知するための冊子検知センサ309と冊子検知センサ320と、各種の搬送ローラを駆動させるための搬送モータ310と、を有している。
【0012】
図2は、図1に示した冊子プリンタ401の機能的な構成を示すブロック図である。図2に示すように、冊子プリンタ401は、搬送部402と、統合ページめくり部101と、印字部304と、これらの動作を制御する主制御部404とを有している。
【0013】
前記搬送部402と主制御部404とは信号線489を介して互いに接続され、統合ページめくり部101と主制御部404とは信号線490または信号線492を介して互いに接続され、印字部304と主制御部404とは信号線491を介して互いに接続されている。そして、主制御部404は、上位装置470と信号線494を介して接続される。
【0014】
前記搬送部402の構成としては、図1に示したように、搬送路301上に冊子挿入口A部から順に搬送ローラ対321、冊子検知センサ309、冊子検知センサ320、搬送ローラ対303、搬送ローラ対308、搬送ローラ対312が配置される構成となっている。搬送ローラ対321、搬送ローラ対303、搬送ローラ対308、搬送ローラ対312は、それぞれ搬送モータ310に接続され、搬送モータ310の動力が伝達される。前記搬送モータ310は信号線483を介して搬送制御部450に接続し、前記搬送制御部450の指示に基づき駆動する。冊子検知センサ309、冊子検知センサ320は、それぞれ信号線481、信号線482を介して搬送制御部450に接続している。
【0015】
また、搬送部402は、顧客が取り忘れた冊子を回収するための回収搬送路301Aが、上述した各搬送路から分岐して設けられ、その搬送路上に搬送される冊子を検知して回収ボックス301Bに回収させるためのセンサ付き搬送ローラ対301Cが配置されている。センサ付き搬送ローラ対301Cは、信号線482Aを介して搬送制御部450に接続する。また、センサ付き搬送ローラ対301Cは、上述した各種の搬送ローラと同様に、搬送モータ310に接続される。
【0016】
統合ページめくり部101は、冊子の搬送方向に対して頁の左側をめくるためのページめくり部110と、冊子の搬送方向に対して頁の右側をめくるためのページめくり部510と、を有している。
【0017】
ページめくり部110は、冊子のページをめくるためのページめくりモータ106と、層状圧力検知センサ102の動作を制御する層状圧力検知制御部132と、搬送方向から搬送されてくる冊子のページからの圧力を検知する層状圧力検知センサ102と、これらの動作を制御するページめくり制御部452Aと、を有している。
【0018】
ページめくり部110は、物理的には、図3に示すように、冊子搬送方向(D方向)と垂直な回転軸を有した支持棒104と、支持棒104に圧着されたページめくりローラ100と、前記ページめくりローラ100の表面に曲率を伴って貼り付けられている二次元にわたって表面の圧力分布を検知して把握する層状圧力検知センサ102と、ページめくりモータ106と、支持棒104とページめくりモータ106とをつなぐドライブシャフト571と、から構成されている。
【0019】
なお、図2に示したように、層状圧力検知センサ102と層状圧力検知制御部132とは信号線群131を介して接続され、層状圧力検知制御部132とページめくり制御部452Aとは信号線487を介して接続され、ページめくりモータ106とページめくり制御部452Aとは信号線484を介して接続され、これらの信号線を介して、ページめくりモータ106の駆動・停止指示、あるいは層状圧力検知センサ102の検知情報等の各種の情報が受け渡されている。
【0020】
ページめくり部510は、ページめくり部110と同様に、冊子のページをめくるためのページめくりモータ580と、層状圧力検知センサ482の動作を制御する層状圧力検知制御部481と、搬送方向(図3に示したD方向)から搬送されてくる冊子のページからの圧力を検知する層状圧力検知センサ482と、これらの動作を制御するページめくり制御部482Aと、を有している。
【0021】
ページめくり部510は、ページめくり部110と同様に、物理的には、図3に示すように、冊子搬送方向(D方向)と垂直な回転軸を有した支持棒504と、支持棒504に圧着されたページめくりローラ500と、前記ページめくりローラ500の表面に曲率を伴って貼り付けられている二次元にわたって表面の圧力分布を検知して把握する層状圧力検知センサ482と、ページめくりモータ580と、支持棒504とページめくりモータ580とをつなぐドライブシャフト574と、から構成されている。
【0022】
なお、図2に示したように、層状圧力検知センサ482と層状圧力検知制御部481とは、信号線群492を介して接続され、層状圧力検知制御部481とページめくり制御部482Aとは信号線488を介して接続され、ページめくりモータ580とページめくり制御部482Aとは信号線485を介して接続され、これらの信号線を介して、ページめくりモータ580の駆動・停止指示、あるいは層状圧力検知センサ482の検知情報等の各種の情報が受け渡されている。このようにして、ページめくり部110とページめくり部510とは、一体化され、統合ページめくり部101として図1に示した搬送路301上に配置されている。
【0023】
続いて、上述した層状圧力検知センサ102が冊子を検知する仕組みについて説明する。図4は、層状圧力検知センサ102が冊子を検知する様子を示す図である。図4では、冊子搬送方向Dからページが開いた状態で冊子が搬送されてきているものとする。このとき、ページめくりローラ100は、支持棒104を支点として、振り子のようにS方向に回転し、冊子のページをめくる構成となっている。
【0024】
層状圧力検知センサ102は、ページの厚さより小さな大きさの層状の圧力検知素子Pを格子状または短冊状に配列したものである(本実施例では反応の良い感圧導電ゴムを使用している)。個々の圧力検知素子Pは、自身の素子にかかる圧力が、不図示のメモリ等に予め定めておいた閾値以上となったか否かを、信号線群131を介して層状圧力検知制御部132に報告する。
【0025】
たとえば、冊子搬送方向Dの方向から冊子が搬送され、冊子上縁部βがC列近傍に接触した場合、C列近傍の圧力検知素子Pが連続的に圧力を検知する。そして、層状圧力検知制御部132は、C列近傍の圧力検知素子Pからの報告を受けて冊子を検知した判断し、信号線487を介してページめくり制御部452Aに対して、搬送された冊子を検知した旨を報告する仕組みづくりがされている。なお、図4では、ページめくり部110を例に説明しているが、ページめくり部510もこれと同様の仕組みづくりがされている。また、本実施例では、二つの層状圧力検知センサを使った例を述べているが、それ以上の層状圧力検知センサを使用しても良いことはもちろんである。
【0026】
印字部304は、ページに字形を現像する印字ヘッド406と、印字ヘッド406の動作を制御する印字制御部453とを有し、これらが互いに信号線486を介して接続されている。続いて、本実施例におけるページめくり処理について説明する。
【0027】
図5は、本実施例におけるページめくり処理の処理手順を示すフローチャートである。図5に示すように、主制御部404は、冊子プリンタ401に接続されている上位装置470から信号線494を介して頁替指示を受けると(ステップS501)、搬送制御部450に対し、吸入シーケンスの実行を指示する(ステップS502)。
【0028】
図6は、図5に示した吸入シーケンスの処理手順を示す図である。図6に示すように、主制御部404から吸入シーケンスの実行指示を受けると、搬送制御部450は、センサ309を監視してON状態であるか否かを判定し(ステップS601)、冊子が挿入されてセンサ309がON状態でないと判定した場合(ステップS601;No)、そのまま待機する。一方、搬送制御部450は、冊子が挿入されてセンサ309がON状態であると判定した場合(ステップS601;Yes)、搬送モータ310を吸入方向に駆動させる(S602)。すると、搬送ローラ対321が冊子を把持し、冊子が搬送方向に搬送される。
【0029】
そして、搬送制御部450は、冊子検知センサ320がON状態であるか否かを判定し(ステップS603)、冊子検知センサ320がON状態でないと判定した場合(ステップS603;No)、そのまま待機する。一方、搬送制御部450は、冊子検知センサ320がON状態であると判定した場合(ステップS603;Yes)、層状圧力検知制御部132に対して冊子検知センサ320に冊子上縁部βを検知させる指示を行い、冊子検知センサ320を冊子が通過した旨を、主制御部404に対して報告する(ステップS604)。このステップS604の処理が終了すると、図6に示した吸入シーケンスの全ての処理が終了する。図5に戻り、ステップS503以降の処理について説明する。
【0030】
ステップS502において吸入シーケンスの処理が終了すると、続いて、主制御部404は、ページめくり準備シーケンス1を行うように、統合ページめくり部101に対して指示する(ステップS503)。図7は、図5に示したページめくり準備シーケンス1の処理手順を示す図である。
【0031】
図7に示すように、統合ページめくり部101は、ページめくり制御部452Aおよびページめくり制御部482Aに対して、それぞれページめくりモータ106およびページめくりモータ580モータの駆動を指示する(ステップS701)。そして、統合ページめくり部101は、不図示のメモリ等にあらかじめ定められた冊子の最薄厚を検知する位置(冊子の搬送方向に対して頁の左側の厚さを検知する位置ε1、および冊子の搬送方向に対して頁の右側の厚さを検知する位置ε2。ε1およびε2についてはいずれも後述。)までページめくりローラ100およびページめくりローラ500を回転させたか否かを判定し(ステップS702)、これらの位置までページめくりローラ100およびページめくりローラ500を回転させていないと判定した場合(ステップS702;No)、そのまま待機する。
【0032】
一方、統合ページめくり部101は、これらの位置までページめくりローラ100およびページめくりローラ500を回転させたと判定した場合(ステップS702;Yes)、主制御部404に対してその旨を報告する(ステップS703)。このステップS703の処理が終了すると、図7に示したページめくり準備シーケンス1の全ての処理が終了する。図5に戻り、ステップS504以降の処理について説明する。
【0033】
ステップS503においてページめくり準備シーケンス1の処理が終了すると、続いて、主制御部404は、ページめくり準備シーケンス2を行うように、搬送制御部450に対して指示する(ステップS504)。図8は、図5に示したページめくり準備シーケンス2の処理手順を示す図である。
【0034】
図8に示すように、主制御部404は、搬送制御部450に対して搬送モータ310を駆動するように指示する(ステップS801)。そして、主制御部404は、統合ページめくり部101が、層状圧力検知制御部132からのみ層状圧力検知センサ102が冊子上縁部βを検知した旨を報告されているか否かを判定し(ステップS802)、層状圧力検知制御部132からのみ層状圧力検知センサ102が冊子上縁部βを検知した旨を報告されていると判定した場合(ステップS802;Yes)、図9Aに示すように冊子が傾いて搬送されたと識別し、以降の処理で冊子の揃え動作を行う。
【0035】
具体的には、主制御部404は、搬送制御部450に対して、冊子の搬送停止を指示し(ステップS803)、統合ページめくり部101に対して、ページめくり制御部482Aが制御するページめくりモータ580を駆動してページめくりローラ500がγ2まで回転するように指示する(ステップS804)。そして、主制御部404は、搬送制御部450に対し、搬送モータ310を駆動して吸入方向に冊子を搬送するように指示する(ステップS805)。このとき、図9Bに示すように、ページめくり部110のページめくり制御部452Aが制御するページめくりモータ106の駆動を停止させることにより、冊子のページのうち搬送方向に対して左側の部分の搬送が停止し、相対的に冊子の搬送方向に対して右側にあるページめくりモータ580側の搬送速度(および搬送量)が大きくなり、冊子の左右の傾きが解消される。
【0036】
そして、主制御部404は、ページめくり部510のページめくり制御部482Aが、層状圧力検知センサ482から冊子上縁部βを検知した旨の報告を受けたか否かを判定し(ステップS806)、層状圧力検知センサ482から冊子上縁部βを検知した旨の報告を受けていないと判定した場合(ステップS806;No)、そのまま待機する。
【0037】
一方、主制御部404は、ページめくり部510のページめくり制御部482Aが、層状圧力検知センサ482から冊子上縁部βを検知した旨の報告を受けたと判定した場合(ステップS806;Yes)、搬送制御部450に対して、搬送モータ310を一旦停止させるように指示し(ステップS807)、その後、冊子の傾きが解消されたと判断して、搬送制御部450に対して、搬送モータ310を駆動させるように指示し、冊子を所定の量だけ搬送させ、排出するように指示する(ステップS808)。
【0038】
ステップS802において、主制御部404は、統合ページめくり部101が、層状圧力検知制御部132からのみ層状圧力検知センサ102が冊子上縁部βを検知した旨を報告されていないと判定した場合(ステップS802;No)、さらに、統合ページめくり部101が、層状圧力検知制御部481からのみ層状圧力検知センサ482が冊子上縁部βを検知した旨を報告されているか否かを判定する(ステップS809)。
【0039】
そして、主制御部404は、統合ページめくり部101が、層状圧力検知制御部481からのみ層状圧力検知センサ482が冊子上縁部βを検知した旨を報告されていると判定した場合(ステップS809;Yes)、図10Aに示すように冊子が傾いて搬送されたと識別し、以降の処理で冊子の揃え動作を行う。
【0040】
具体的には、主制御部404は、搬送制御部450に対して、冊子の搬送停止を指示し(ステップS810)、統合ページめくり部101に対して、ページめくり制御部452Aが制御するページめくりモータ106を駆動して、ページめくりローラ100がγ1まで回転するように指示する(ステップS811)。そして、主制御部404は、搬送制御部450に対し、搬送モータ310を駆動して吸入方向に冊子を搬送するように指示する(ステップS812)。このとき、図10Bに示すように、ページめくり部510のページめくり制御部482Aが制御するページめくりモータ580の駆動を停止させることにより、冊子のページのうち搬送方向に対して右側の部分の搬送が停止し、相対的に冊子の搬送方向に対して左側にあるページめくりモータ106側の搬送速度(および搬送量)が大きくなり、冊子の左右の傾きが解消される。
【0041】
そして、主制御部404は、ページめくり部110のページめくり制御部452Aが、層状圧力検知センサ102から冊子上縁部βを検知した旨の報告を受けたか否かを判定し(ステップS813)、層状圧力検知センサ102から冊子上縁部βを検知した旨の報告を受けていないと判定した場合(ステップS813;No)、そのまま待機する。
【0042】
一方、主制御部404は、ページめくり部110のページめくり制御部452Aが、層状圧力検知センサ102から冊子上縁部βを検知した旨の報告を受けたと判定した場合(ステップS813;Yes)、搬送制御部450に対して、搬送モータ310を一旦停止させるように指示し(ステップS807)、その後、冊子の傾きが解消されたと判断して、搬送制御部450に対して、搬送モータ310を駆動させるように指示し、冊子を所定の量だけ搬送させ、排出するように指示する(ステップS808)。
【0043】
ステップS809において、主制御部404は、統合ページめくり部101が、層状圧力検知制御部481からのみ層状圧力検知センサ482が冊子上縁部βを検知した旨を報告されていないと判定した場合(ステップS809;No)、さらに、統合ページめくり部101が、層状圧力検知制御部132および層状圧力検知制御部481から、それぞれ層状圧力検知センサ102が冊子上縁部βを検知した旨および層状圧力検知センサ482が冊子上縁部βを検知した旨を報告されているか否かを判定し(ステップS814)、これらの両方から冊子上縁部βを検知した旨を報告されていないと判定した場合(ステップS814;No)、ステップS802に戻って、以降の各処理を繰り返し行う。
【0044】
一方、主制御部404は、統合ページめくり部101が、これらの両方から冊子上縁部βを検知した旨を報告されている(例えば、これらの両方から同時に報告されている)と判定した場合(ステップS814;Yes)、冊子が左右のどちらにも傾かずに、統合ページめくり部101の下部に搬送されたと判断し、搬送制御部450に対して、搬送モータ310を一旦停止させるように指示し(ステップS807)、その後、冊子の傾きはないと判断して、搬送制御部450に対して、搬送モータ310を駆動させるように指示し、冊子を所定の量だけ搬送させ、排出するように指示する(ステップS808)。このステップS808の処理が終了すると、図8に示したページめくり準備シーケンス2の全ての処理が終了する。図5に戻り、ステップS505以降の処理について説明する。
【0045】
ステップS504においてページめくり準備シーケンス2の処理が終了すると、続いて、主制御部404は、冊子上縁部βが、搬送方向に対して垂直になったと判断し、ページめくり位置あわせシーケンスを行うように、統合ページめくり部101に対して指示する(ステップS505)。図11は、図5に示したページめくり位置あわせシーケンスの処理手順を示す図である。
【0046】
図11に示すように、主制御部404は、統合ページめくり部101に対して、ページめくりモータ106およびページめくりモータ580を駆動するように指示し(ステップS1101)、吸入方向に搬送されてくる冊子上縁部βが、上下の振幅(搬送方向およびページ面に垂直なZ軸方向)をもって自励振動を起こして、紙詰まりをおこさないように、振幅を押さえるが搬送を妨げない位置(例えば、図9Aまたは図10Aに示した位置γ1およびγ2までページめくりローラ100およびページめくりローラ500が回転するように指示し、各ページめくりローラが位置γ1およびγ2まで回転したか否かを判定し(ステップS1102)、これらの位置まで回転していないと判定した場合(ステップS1102;No)、そのまま待機する。
【0047】
一方、主制御部404は、各ページめくりローラが位置γ1およびγ2まで回転したと判定した場合(ステップS1102;Yes)、搬送制御部450に対して搬送モータ310を駆動させて冊子の搬送を開始させ(ステップS1103)、冊子が吸入されて所定の量だけ搬送されると、その後搬送モータ310を停止する指示をする(ステップS1104)。このステップS1104の処理が終了すると、図11に示したページめくり位置あわせシーケンスの全ての処理が終了する。図5に戻り、ステップS506以降の処理について説明する。
【0048】
ステップS505においてページめくり位置あわせシーケンスの処理が終了すると、続いて、主制御部404は、冊子のページめくりの準備が完了したと判断し、ページめくりシーケンスを行うように、統合ページめくり部101に対して指示する(ステップS506)。図12は、図5に示したページめくりシーケンスの処理手順を示す図である。
【0049】
図12に示すように、主制御部404は、統合ページめくり部101に対して、ページめくりモータ106およびページめくりモータ580を駆動するように指示し、冊子をε1およびε2の位置まで移動させ(ステップS1201)、その後、ページめくりローラ100およびページめくりローラ500を回転させて冊子表面のページをたわませたのち、搬送制御部450に対して、冊子の吸入方向に搬送モータ310を駆動してページ替するように指示し(ステップS1202)、搬送モータ310の停止を指示する(ステップS1203)。このステップS1203の処理が終了すると、図12に示したページめくりシーケンスの全ての処理が終了し、図5に示したページめくり処理の全ての処理が終了する。
【0050】
このような動作原理により、搬送路に対して斜めに搬送された冊子を適切な方向に補正している。また、検知機能をページめくりローラの内部に加えたことにより、外部に冊子が斜めに搬送されていることを検知するセンサ等を備えなくても、冊子の斜め搬送の補正機能を有したページめくり装置の提供が可能となる。
【0051】
従って、図13A〜13Fに示すように、従来から存在するページめくりローラとめくられる冊子のページとの摩擦力によりページをめくる機構においては(図13A)、ページめくりローラを紙葉の任意の位置に搬送し(図13B)、複数のページめくりローラを回転させてページをたわませた状態で冊子を搬送し、ページをめくった場合において(図13C〜13E)、ページめくりローラの回転軸に冊子上縁が平行でなく斜めに搬送されてきた冊子のページに対して、複数のめくりローラが作り出すたわみ量が不均一になることによる、ページの端面の折れ曲がりや、中央部に皺より(図13F)などの問題を生じさせてしまうことがなくなる。
【0052】
また、本実施例における冊子プリンタ401は、図1に示したように、回収搬送路301Aと、回収ボックス301Bと、センサ付き搬送ローラ対301Cと、切り替えゲート301Dとを有しており、例えば、主制御部404が、顧客が取引を行った後に所定の時間が経過しても未だ冊子検知センサ309が冊子を検知していると判定した場合には、主制御部404は、切り替えゲート301Dを回収搬送路301Aの方向に切り替えて各搬送ローラ対を駆動させ、冊子を一旦吸入した後に、回収搬送路301Aの方向に搬送させる。すると、センサ付き搬送ローラ対301Cが搬送されてきた冊子を検知し、その後、センサ付き搬送ローラ対301Cが駆動して、冊子が回収ボックス301Bに回収される。
【0053】
主制御部404は、このような動作を行わせるので、顧客が冊子を取り忘れた場合であっても、次の取引が実行される際に誤って冊子が排出されてしまうことがなくなる。また、センサ付き搬送ローラ対301Cは、冊子を検知するセンサと搬送ローラ対とが一体となって設けられているので、冊子プリンタ401の内部のスペースが少ない場合であっても、そのスペースを有効に活用して冊子を回収することが可能となっている。
【0054】
なお、本実施例では、挿入口が一つの冊子プリンタについて述べているが、二つの挿入口があり、印字部304の挿入口側で搬送路が統合されるところの金融機関窓口で使用される通帳プリンタも同様である。
【産業上の利用可能性】
【0055】
本発明は、銀行等の金融機関で使用される現金自動取引装置や通帳記帳機等の通帳を扱う取引装置、その自動取引装置で有用である。
【符号の説明】
【0056】
401 冊子プリンタ
101 統合ページめくり部
301 搬送路
303、308、312、321 搬送ローラ対
301A 回収搬送路
301B 回収ボックス
301C センサ付き搬送ローラ対
301D 切り替えゲート
304 印字部
309、320 冊子検知センサ
310 搬送モータ
402 搬送部
404 主制御部
470 上位装置
450 搬送制御部
110、510 ページめくり部
106、580 ページめくりモータ
102、482 層状圧力検知センサ
132、481 層状圧力検知制御部
102、482 層状圧力検知センサ
452A、482A ページめくり制御部
104、504 支持棒
100、500 ページめくりローラ
571、574 ドライブシャフト。
【特許請求の範囲】
【請求項1】
冊子のページに所定の情報を印字する冊子プリンタであって、
挿入口から搬送された前記冊子のページの搬送方向に対して垂直方向のうちの一方の部分である第1の部分をめくるための第1のページめくりローラおよび前記第1のページめくりローラを駆動するための第1の駆動モータと、前記第1の部分とは異なる他方の部分である第2の部分をめくるための第2のページめくりローラおよび前記第2のページめくりローラを駆動するための第2の駆動モータと、を有したページめくり機構部と、
前記第1のページめくりローラ側に前記冊子が搬送されてきたか否かを検知する第1のセンサと、前記第2のページめくりローラ側に前記冊子が搬送されてきたか否かを検知する第2のセンサと、を有したセンサ機構部と、
前記挿入口から前記ページめくり機構部および前記センサ機構部まで前記冊子を搬送する搬送路と、
前記第1のセンサまたは前記第2のセンサのいずれかのみが前記冊子を検知した場合に、前記冊子を検知したセンサ側の駆動モータを停止させるとともに前記冊子を検知していないセンサ側の駆動モータのみを駆動させ、前記第1のセンサおよび前記第2のセンサのいずれもが前記冊子を検知すると前記冊子のページをめくるように前記ページめくり機構部の動作を制御する主制御部と、
を備えたことを特徴とする冊子プリンタ。
【請求項2】
前記センサ機構部の各センサは、前記第1のページめくりローラおよび前記第2のページめくりローラの表面に設けられ、前記冊子のページの圧力を検知する圧力検知センサである、
ことを特徴とする請求項1に記載の冊子プリンタ。
【請求項3】
前記各センサは、前記冊子のページのうちの搬送方向の縁部分を検知するものである、
ことを特徴とする請求項2に記載の冊子プリンタ。
【請求項4】
前記各センサは、前記冊子のページの厚さより小さな大きさの層状の圧力検知素子を格子状に配列したものである、
ことを特徴とする請求項2または3に記載の冊子プリンタ。
【請求項5】
前記主制御部は、前記第1のセンサまたは前記第2のセンサのいずれかのみが前記冊子を検知した場合に、前記冊子を検知したセンサ側の部分の搬送量よりも前記冊子を検知していないセンサ側の部分の搬送量を大きくすることにより、前記冊子の傾きを解消させる、
ことを特徴とする請求項1〜4のいずれか1項に記載の冊子プリンタ。
【請求項6】
前記第1のページめくりローラと前記第2のページめくりローラとは、前記垂直方向に並んで配置されている、
ことを特徴とする請求項1〜5のいずれか1項に記載の冊子プリンタ。
【請求項7】
前記冊子を回収するための回収ボックスと、前記ページめくり機構部および前記センサ機構部から前記回収ボックスまで前記冊子を搬送する回収搬送路と、前記回収搬送路に前記冊子が搬送されてきたか否かを検知する回収センサを有した回収搬送ローラと、をさらに備え、
前記主制御部は、前記各センサが所定の時間前記冊子を検知している場合には、前記回収搬送路に前記冊子を搬送し、搬送された前記冊子を前記回収センサが検知した場合に前記回収搬送ローラを駆動させて前記冊子を前記回収ボックスに回収させる、
ことを特徴とする請求項1〜6のいずれか1項に記載の冊子プリンタ。
【請求項1】
冊子のページに所定の情報を印字する冊子プリンタであって、
挿入口から搬送された前記冊子のページの搬送方向に対して垂直方向のうちの一方の部分である第1の部分をめくるための第1のページめくりローラおよび前記第1のページめくりローラを駆動するための第1の駆動モータと、前記第1の部分とは異なる他方の部分である第2の部分をめくるための第2のページめくりローラおよび前記第2のページめくりローラを駆動するための第2の駆動モータと、を有したページめくり機構部と、
前記第1のページめくりローラ側に前記冊子が搬送されてきたか否かを検知する第1のセンサと、前記第2のページめくりローラ側に前記冊子が搬送されてきたか否かを検知する第2のセンサと、を有したセンサ機構部と、
前記挿入口から前記ページめくり機構部および前記センサ機構部まで前記冊子を搬送する搬送路と、
前記第1のセンサまたは前記第2のセンサのいずれかのみが前記冊子を検知した場合に、前記冊子を検知したセンサ側の駆動モータを停止させるとともに前記冊子を検知していないセンサ側の駆動モータのみを駆動させ、前記第1のセンサおよび前記第2のセンサのいずれもが前記冊子を検知すると前記冊子のページをめくるように前記ページめくり機構部の動作を制御する主制御部と、
を備えたことを特徴とする冊子プリンタ。
【請求項2】
前記センサ機構部の各センサは、前記第1のページめくりローラおよび前記第2のページめくりローラの表面に設けられ、前記冊子のページの圧力を検知する圧力検知センサである、
ことを特徴とする請求項1に記載の冊子プリンタ。
【請求項3】
前記各センサは、前記冊子のページのうちの搬送方向の縁部分を検知するものである、
ことを特徴とする請求項2に記載の冊子プリンタ。
【請求項4】
前記各センサは、前記冊子のページの厚さより小さな大きさの層状の圧力検知素子を格子状に配列したものである、
ことを特徴とする請求項2または3に記載の冊子プリンタ。
【請求項5】
前記主制御部は、前記第1のセンサまたは前記第2のセンサのいずれかのみが前記冊子を検知した場合に、前記冊子を検知したセンサ側の部分の搬送量よりも前記冊子を検知していないセンサ側の部分の搬送量を大きくすることにより、前記冊子の傾きを解消させる、
ことを特徴とする請求項1〜4のいずれか1項に記載の冊子プリンタ。
【請求項6】
前記第1のページめくりローラと前記第2のページめくりローラとは、前記垂直方向に並んで配置されている、
ことを特徴とする請求項1〜5のいずれか1項に記載の冊子プリンタ。
【請求項7】
前記冊子を回収するための回収ボックスと、前記ページめくり機構部および前記センサ機構部から前記回収ボックスまで前記冊子を搬送する回収搬送路と、前記回収搬送路に前記冊子が搬送されてきたか否かを検知する回収センサを有した回収搬送ローラと、をさらに備え、
前記主制御部は、前記各センサが所定の時間前記冊子を検知している場合には、前記回収搬送路に前記冊子を搬送し、搬送された前記冊子を前記回収センサが検知した場合に前記回収搬送ローラを駆動させて前記冊子を前記回収ボックスに回収させる、
ことを特徴とする請求項1〜6のいずれか1項に記載の冊子プリンタ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9A】
【図9B】
【図10A】
【図10B】
【図11】
【図12】
【図13A】
【図13B】
【図13C】
【図13D】
【図13E】
【図13F】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9A】
【図9B】
【図10A】
【図10B】
【図11】
【図12】
【図13A】
【図13B】
【図13C】
【図13D】
【図13E】
【図13F】
【公開番号】特開2012−218324(P2012−218324A)
【公開日】平成24年11月12日(2012.11.12)
【国際特許分類】
【出願番号】特願2011−87368(P2011−87368)
【出願日】平成23年4月11日(2011.4.11)
【出願人】(504373093)日立オムロンターミナルソリューションズ株式会社 (1,225)
【Fターム(参考)】
【公開日】平成24年11月12日(2012.11.12)
【国際特許分類】
【出願日】平成23年4月11日(2011.4.11)
【出願人】(504373093)日立オムロンターミナルソリューションズ株式会社 (1,225)
【Fターム(参考)】
[ Back to top ]