
写真測量装置及び写真測量システム
【課題】写真測量を用いた測定対象の三次元形状の測定において、処理を自動化することによって手間を省略するとともに、より正確に測定する
【解決手段】複数の撮影装置で撮影された撮影画像から測定画像を作成する測定画像作成部33bと、測定画像からそれぞれの撮影装置に対応する対応点座標を抽出する対応点抽出部33cと、前記対応点座標から前記測定対象の三次元形状を求める形状測定部33dと、前記対応点座標に対し前記測定対象の撮影位置と前記設計データによって決定されている前記測定対象の基準位置との誤差補正を行い、前記測定対象の三次元形状を補正する位置補正部33eと、前記位置補正部により補正された三次元形状と前記設計データを比較することによって、前記測定対象の変形箇所の位置と変形量とを算出する変形量算出部33fとを備える。
【解決手段】複数の撮影装置で撮影された撮影画像から測定画像を作成する測定画像作成部33bと、測定画像からそれぞれの撮影装置に対応する対応点座標を抽出する対応点抽出部33cと、前記対応点座標から前記測定対象の三次元形状を求める形状測定部33dと、前記対応点座標に対し前記測定対象の撮影位置と前記設計データによって決定されている前記測定対象の基準位置との誤差補正を行い、前記測定対象の三次元形状を補正する位置補正部33eと、前記位置補正部により補正された三次元形状と前記設計データを比較することによって、前記測定対象の変形箇所の位置と変形量とを算出する変形量算出部33fとを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、測定対象の形状を描くための写真測量装置及び写真測量システムに関し、更に詳述すれば鉄鋼業において、コークス炉、高炉、高炉熱風炉、転炉、電気炉、ロータリーキルン、AOD炉、VOD炉、RH炉、溶銑鍋、取鍋、トーピード、加熱炉、均熱炉等の機械構造物の内面形状又は外面形状を好適に測量可能な写真測量装置及び写真測量システムに関する。
【背景技術】
【0002】
鉄鋼業において用いられる高炉、転炉等の内面には、容器本体保護のため耐火煉瓦が内張りされている。この耐火煉瓦は、内部の溶融金属等により徐々に損耗するため、損耗の進行状況に応じて張り替える必要がある。
【0003】
内張り耐火物の損耗は、全体が均一に摩耗することはまれであり、実際は局部的に損耗することが多い。局部的損耗が所定量以上に進行した場合にも、その部分又は全部の耐火物の張り替え、上張り等の補修が必要となる。
【0004】
しかしながらこのような耐火物の補修は、容器を一旦冷却し、先に内張りされた耐火物を除去したのち、新しい耐火物を内張りしなければならない。したがって、多大の労力と時間を要し、特に転炉等においては補修作業中、操業停止となるため効率化操業の阻害要因となっている。それ故にこれらの炉においては耐火物の損耗状態を随時観察し、必要な場合には局部的損耗部にセラミック等の耐火材料を吹き付けて補修し、損耗を抑制している。
【0005】
このような補修を効率的に行うには、高温状態にある炉内の内張り耐火物の損耗状態を把握する必要が生ずるが、炉内は赤熱状態であること、ガスや高温環境のため炉近傍に近寄れないこと等の理由により目視による損耗状態の把握は困難である。このような実情のもと、従来からこれらの炉の内面形状を測定するための方法が種々提案されている。
【0006】
この方法は耐火物にレーザー光等の光を走査させるレーザー式形状計が主流となっている。これは大きく分けて投光部を炉内に設けたものと炉外に設けたものの2通りがある。前者の代表は光波距離計を用いて複数の波長に変調されたレーザーを照射し、位相差に基づき距離を求める方式やレーザーそのものの耐火物照射時の往復時間を計測する飛行時間方式である。後者の代表は測定器としてレーザーを用いるが、レーザー計本体をプローブに装着して炉内に挿入することで前者の死角も測定可能としている。この装置は例えば、特開昭54−115160号公報などに開示されている。
【0007】
しかし、従来技術に見られるレーザー式形状計はコスト上、操作上更にはレーザー取扱いの安全上、種々の問題があった。例えば、コスト上においては、レーザー式形状計本体そのものが高価であり、更に測定対象設備が回転型の転炉等には高精度かつ高価な角度計を必要とする。また、操作上においては、耐火物残厚の測定は、温度を低下させることにより耐火物亀裂を防止する観点より、操業の合間の短時間を利用することになる。そのため、レーザーによる距離測定は、1点あたり0.3秒程度かかり、測定点数も1000点未満となり、全体を詳細に把握することが困難となる。従って、レーザーを通常運用する場合、隣り合う測定点の距離が10cm程度となり、その結果クラックや局部損耗等の異常部位を発見することはできない致命的な問題が残されている。さらに、レーザー取り扱いにおいては、耐火物残厚の測定用途の場合、高出力レーザーを必要とし、そのための安全対策として遮光メガネの着用、管理区域の設定、レーザービームのストッパが必要となり、コストの増加と操作性の悪化を招いていた。
【0008】
上記のように多くの問題を備えるレーザー式形状計に変わる非接触による別の計測方法として、写真計測が考えられる。写真計測とは、測定対象が写るように、2箇所以上の場所から撮影した複数枚の画像を用い、同一個所の対応付けを行い、三角測量の原理に基づき、三次元計測する手法である。この手法は従来、航空写真を用いて地形図作成のために利用されていた。近年デジタルカメラの発達により、写真計測は対象物を選ぶことなく計測されるようになってきている。
【特許文献1】特開2004−77377号公報
【非特許文献1】徐剛著:「3次元ビジョン」、近代科学社、1998年4月
【非特許文献2】服部進、秋本圭一、井本治孝:「コード付きターゲットを使った工業画像計測の自動化」、電子情報通信学会論文誌、Vol.J84-D-II,No.9,pp.2011-2019,2001.
【非特許文献3】社団法人 日本写真測量学会:「解析写真測量 改訂版」、社団法人 日本写真測量学会・解析写真測量委員会 責任者 村井利治、昭和58年6月15日、p.126−147
【非特許文献4】秋本 圭一:情報化施工のためのデジタル画像計測法に関する研究,京都大学博士論文,March,2002
【非特許文献5】徐剛著:「写真から作る3次元CG」、近代科学社、2001年1月
【発明の開示】
【発明が解決しようとする課題】
【0009】
しかし、従来の写真計測においては、いくつかの問題を含んでいる。一つ目は、カメラの撮影位置を計算するために、2つの画像間で対応付け、撮影位置を算出する作業である。この作業は人の手によって行われるため、精度が不安定になることがある。また作業時間もかかっているのが現状である。二つ目は、測定対象の詳細な形状を得るために、対応点の数を増やす作業である。この作業は、画像相関などの手法により、ある程度自動化されているものの、誤った対応点が発生していた。この誤った対応点は、人の手により、修正をおこなっていたため、非常に多くの時間を費やしていた。
【0010】
したがって、本発明が解決しようとする技術的課題は、写真測量を用いた測定対象の三次元形状の測定において、処理を自動化することによって手間を省略するとともに、より正確に測定することができる写真測量装置及び写真測量システムを提供することである。
【課題を解決するための手段】
【0011】
本発明は、上記技術的課題を解決するために、以下の構成の写真測量装置を提供する。
【0012】
本発明の第1態様によれば、撮影装置によって異なる複数の位置から撮影した画像を用いて測量対象の三次元形状を測量する写真測量装置であって、
測定対象周辺に配置した複数の基準点を含む空間を撮影する複数の前記撮影装置の撮影動作を制御する撮影制御部と、
前記撮影制御部の動作により前記複数の撮影装置で撮影された撮影画像を用いて、それぞれの撮影装置に対応する測定画像を作成する測定画像作成部と、
前記測定画像からそれぞれの撮影装置に対応する測定画像に共通する基準点の対応点座標を抽出する基準点抽出部と、
前記測定画像からそれぞれの撮影装置に対応する測定画像に共通する測定対象について特定された特徴点の特徴点座標と当該特徴点について他の測定画像上で対応づけられた対応点の対応点座標を抽出する対応点抽出部と、
前記特徴点座標と対応点座標から前記対応点の三次元的な位置情報を求め、前記対応点の位置情報に基づいて、前記測定対象の三次元形状を求める形状測定部と、
前記形状測定部によって求められた対応点の三次元位置と前記測定対象の設計データによって決定されている前記測定対象の基準位置との誤差補正を行い、前記測定対象の三次元位置を補正する位置補正部とを備えることを特徴とする、写真測量装置を提供する。
【0013】
また、本発明の第2態様によれば、撮影装置によって異なる複数の位置から撮影した画像を用いて測量対象の三次元形状を測量し、記憶部に記憶されている前記測量対象の設計データと前記測量対象の三次元形状とを比較して、測量対象と前記設計データとの形状の差を演算する写真測量装置であって、
測定対象周辺に配置した複数の基準点を含む空間を撮影する複数の前記撮影装置の撮影動作を制御する撮影制御部と、
前記撮影制御部の動作により前記複数の撮影装置で撮影された撮影画像を用いて、それぞれの撮影装置に対応する測定画像を作成する測定画像作成部と、
前記測定画像からそれぞれの撮影装置に対応する測定画像に共通する基準点の対応点座標を抽出する基準点抽出部と、
前記測定画像からそれぞれの撮影装置に対応する測定画像に共通する測定対象の共通の対応点座標を抽出する対応点抽出部と、
前記対応点座標から前記対応点の三次元的な位置情報を求め、前記対応点の位置情報に基づいて、前記測定対象の三次元形状を求める形状測定部と、
前記形状測定部によって求められた基準点の三次元位置と前記設計データによって決定されている前記測定対象の基準位置との誤差補正を行い、前記測定対象の三次元位置を補正する位置補正部と、
前記位置補正部により補正された三次元形状と前記設計データを比較することによって、前記測定対象の変形箇所の位置と変形量とを算出する変形量算出部とを備えることを特徴とする、写真測量装置を提供する。
【0014】
本発明の第3態様によれば、前記撮影制御部は、前記複数の撮影装置を1つのトリガ信号によって同時に撮影制御することを特徴とする、第1又は第2態様の写真測量装置を提供する。
【0015】
本発明の第4態様によれば、前記撮影制御部は、前記トリガ信号を間欠的に複数回発生させ、前記複数の撮影装置によって同時に連続的に撮影が行われるように撮影制御することを特徴とする、第3態様の写真測量装置を提供する。
【0016】
本発明の第5態様によれば、前記測定画像作成部は、任意の複数の写真画像を抽出する手段が全ての撮影装置において撮影時刻が同じ1組の撮影画像を選択し、当該撮影画像を測定画像とするように構成されていることを特徴とする、第1から第4態様のいずれか1つの写真測量装置を提供する。
【0017】
本発明の第6態様によれば、前記測定画像作成部は、個々の撮影装置において前記連続的に撮影された複数の撮影画像について、前記複数の撮影画像を微細領域に分割して撮影画像上の任意の輝度が同一の部分に相当する微細領域の輝度の差分処理を行う差分処理部と、
前記差分処理部により差分処理された部分の輝度差が閾値以内のもののみを用いて、新たな写真画像に編集する画像編集部を備え、
前記それぞれの撮影装置ごとに前記画像編集部によって編集された写真画像を測定画像とすることを特徴とする、第5態様の写真測量装置を提供する。
【0018】
本発明の第7態様によれば、前記基準点抽出部は、先の測量時に用いられた測定画像において抽出された基準点座標である事前基準点座標の近傍の範囲を走査し、前記測定画像から基準点座標を抽出することを特徴とする、第1から第6態様の写真測量装置を提供する。
【0019】
本発明の第8態様によれば、前記対応点抽出部は、先の測量時に用いられた測定画像において抽出された対応点座標である前記事前対応点座標の近傍の範囲を走査し、前記測定画像から対応点座標を抽出することを特徴とする、第1から第6態様のいずれか1つの写真測量装置を提供する。
【0020】
本発明の第9態様によれば、前記形状測定部によって得られた三次元座標を前記設計データと比較し、前記設計データにより特定される三次元形状から所定距離以上離れた点として求められた三次元座標を除いて、前記測定対象の三次元形状を特定することを特徴とする、第2から第8態様のいずれか1つの写真測量装置を提供する。
【0021】
本発明の第10態様によれば、対応点抽出部は、複数の測定画像について、測定対象の同じ場所を画像相関により対応付ける対応点設定部と、
前記対応点設定部により対応づけられた点の真偽を判定する誤対応点抽出部とを備え、 前記誤対応点抽出部は、1つの測定対象について特定された特徴点について対応づけられた対応点から得られる三次元座標と、予め用意された測定対象の三次元形状のデータを比較し、前記対応点から得られる三次元座標が、測定対象の三次元形状の近傍にない対応点を誤りであると判定することを特徴とする、第1から第9態様のいずれか1つの写真測量装置を提供する。
【0022】
本発明の第11態様によれば、測定対象の前記三次元形状のデータは、前記測定対象の設計データであることを特徴とする、第10態様に記載の写真測量装置を提供する。
【0023】
本発明の第12態様によれば、測定対象の前記三次元幾何形状のデータは、前記測定対象について、先の測量時に測量された三次元計測データであることを特徴とする、第10態様の写真測量装置を提供する。
【0024】
本発明の第13態様によれば、対応点抽出部は、複数の測定画像について、測定対象の同じ場所を画像相関により対応付ける対応点設定部と、
前記対応点設定部により対応づけられた点の真偽を判定する誤対応点抽出部とを備え、
前記対応点設定部は、任意の1の測定画像に設定する特徴点を任意に特定された配置となるように設定し、前記設定された特徴点に対応するように他の測定画像上に対応点を設定し、
前記誤対応点抽出部は、対象となる前記対応点の周囲に配置された対応点の配置が、前記特徴点において特定された配置と比較して閾値を越える変化を有するときは、当該対象となる対応点が誤対応点であると判断することを特徴とする、第1から第9態様のいずれかの写真測量装置を提供する。
【0025】
本発明の第14態様によれば、前記対応点設定部は、前記任意の1の測定画像に設定する特徴点を格子状配置となるように設定することを特徴とする、第13態様の写真測量装置を提供する。
【0026】
本発明の第15態様によれば、前記誤対応点抽出部は、前記対象となる対応点に隣接する1つの対応点を結ぶ直線と、前記対象となる前記隣接する対応点の反対側に隣接する対応点とを結ぶ直線とがなす角度が、閾値を越える場合に、前記対象となる対応点が誤対応点であると判断する、第13又は第14態様の写真測量装置を提供する。
【0027】
本発明の第16態様によれば、前記誤対応点抽出部は、前記対象となる対応点に隣接する対応点を結ぶ直線Aと、前記対象となる前記隣接する対応点の反対側に隣接する対応点とを結ぶ直線Bとの長さの和が、閾値を越える場合に、前記対象となる対応点が誤対応点であると判断する、写真測量システムを提供する。
【0028】
本発明の第17態様によれば、第1から第16態様のいずれか1つに記載の写真測量装置と、前記測定対象の近傍に配置され前記基準点として機能するターゲットを複数固定する基準点ユニットと、前記複数の撮影装置を前記基準点ユニットと前記測定対象が撮影できるような位置に固定可能に構成されたカメラ固定ユニットとを備えた写真測量システムであって、
前記基準点ユニットは、前記ターゲットを前記撮影装置により撮影される測定対象のX、Y、Z軸の各成分別に、測定対象の最大距離の半分以上の距離を置いて配置されることを特徴とする、写真測量システムを提供する。
【0029】
本発明の第18態様によれば、第1から第16態様のいずれか1つに記載の写真測量装置と、前記測定対象の近傍に配置され前記基準点として機能するターゲットを複数固定する基準点ユニットと、前記複数の撮影装置を前記基準点ユニットと前記測定対象が撮影できるような位置に固定可能に構成されたカメラ固定ユニットとを備えた写真測量システムであって、
前記ターゲットは、発光部を備え、前記写真測量装置は前記発光部からの光を前記基準点して前記撮影装置により撮影することを特徴とする、写真測量システムを提供する。
【0030】
なお、本発明の説明に用いる用語は、次の意味を有するものとする。
【0031】
「撮影装置」とは、測定対象及び基準点を被写体として光学撮影可能であり、かつ当該撮影された画像を電子情報として作成可能な装置を意味する。例えば、デジタルカメラなどが例示できるが、銀塩カメラと銀塩カメラにより撮影された写真を画像情報として変換可能なスキャナとを備えるユニットで構成されていてもよい。
【0032】
「撮影画像」とは、測定対象及び基準点を被写体として撮影装置で撮影された写真画像をいう。撮影画像は、一回の測量に1つの撮影装置について複数枚存在していてもよく、1枚のみであってもよい。また、任意のタイミングの静止画を抽出可能な動画であってもよい。
【0033】
「測定画像」とは、それぞれの撮影装置につき、測量演算に用いるために撮影画像を用いて測定画像作成部により作成される静止画の画像である。撮影画像が複数である場合は、複数の撮影画像のうちの1枚をそのまま測定画像としてもよいし、複数の撮影画像を部分的に用いて測定画像を画像合成により作成してもよい。測定画像は、それぞれの撮影装置に対応して1枚ずつ作成されるものであり、測定対象の形状を写真測量の原理で測定する場合に用いられる画像となる。
【0034】
「測定対象の三次元形状」とは、測定対象について写真測量された結果として得られる測定対象の物理的な形状を意味し、当該測定対象上に位置する多数の点の三次元座標値を認識可能なものである。三次元形状のデータは、必ずしも多数の点の三次元座標値の集合として表されている必要はなく、CADなどの設計図面データなどで与えられていてもよいが、任意の点の三次元座標値を認識できるものである必要がある。
【0035】
「特徴点」とは、1組の測定画像のうち基準となる1の測定画像上に配置された点である。特徴点は、測定対象の三次元形状の算出に用いられるものであり、任意に設定することができる。
【0036】
「対応点」とは、1組の測定画像のうち基準とならなかった他の測定画像上において、特徴点において示される被写体上の同じ点を示す点である。対応点は、測定対象の三次元形状の算出に用いられるものであり、特徴点と同じ被写体上の点を示すものであるから、特徴点と同様の配置で他の画像上に表されることが多い。
【発明の効果】
【0037】
本発明によれば、測定対象の形状を写真測量によって測定することができるとともに、設計データに合わせて誤差補正を行うことで測定対象の変形箇所の位置と変形量とを確実かつ容易に算出することができる。
【発明を実施するための最良の形態】
【0038】
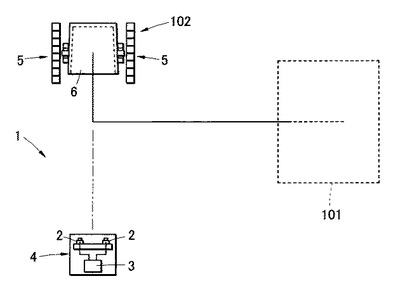
次に、本発明の写真測量装置の実施形態にかかる写真測量システムについて説明する。図1A及び図1Bは、本発明の写真測量装置の一実施形態にかかる写真測量システムの全体構成を示す模式図である。以下、本システムを製鉄所において用いられる取鍋の内面形状の測定に用いた取鍋用写真測量システムを例にとって説明する。図1Bに示すように本実施形態にかかる写真測量システム1は、測定対象である取鍋6を製鉄作業領域101から測定領域102へ移動させるクレーンを備える。写真測量システム1は、当該測定領域102に配置された取鍋を写真測量の原理により測量する。
【0039】
図1Aに示すように、取鍋用写真測量システム1は、測定対象となる取鍋6の内面を撮影するための複数のカメラ2をカメラ固定ユニット4に配置している。写真測量の原理によれば、カメラは最低2台があれば、計測することが可能である。なお、精度をあげるために3つ以上カメラを設置してもよい。
【0040】
また、取鍋用写真測量システム1には、制御ユニット3が設けられている。制御ユニットは、それぞれのカメラで撮影された写真画像を用いて取鍋の形状計測の処理を行う写真測量装置として機能する。当該制御ユニット3の構成及び処理の詳細については後述する。
【0041】
本実施形態にかかる写真測量システムに用いられるカメラ2は、予め内部標定が行われたものを用いることで測定精度を向上させることができる。内部標定とはカメラ特有のパラメータであり、焦点距離、主点位置、歪み補正値を表すものである。内部標定の方法は公知の方法により行うことができる。なお、内部評定は、複数のカメラ2のそれぞれについて行われる。
【0042】
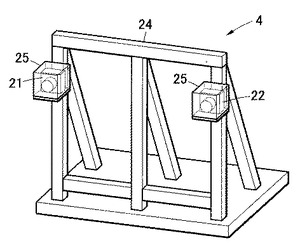
図2はカメラ固定ユニットの構成を示す図である。カメラ固定ユニット4は、カメラ固定台24の上に、2台のデジタルスチルカメラ21、22を備える。本実施形態においては、カメラ21,22は、それぞれ3000画素×4000画素の画像を撮影することができるデジタルカメラが用いられている。それぞれのカメラ21、22の相対的な位置関係は、後述する処理によって算出され、制御ユニット3の記憶部に格納される。
【0043】
また、2台のカメラ21、22は、制御ユニット3からの信号を受けて、同じタイミングで撮影可能に構成されている。同じタイミングで撮影することにより、2台のカメラ21、22で撮影された取鍋内面の温度変化による測定誤差の影響を受けにくくすることができ、取鍋6の熱による寸法変化などの問題を少なくすることができる。これに対して1台のカメラを用いて撮影場所を異ならせて撮影する場合、その移動中に取鍋内面の温度が変化する。このため、得られた複数の画像は取鍋の温度変化の影響を受け、画像が変化する。よって、後述する複数枚の画像間で行われる対応付けが、温度変化のために困難となる可能性がある。すなわち、複数のカメラを同時に撮影可能とすることにより、それぞれのカメラで撮影された画像の対応付けを容易にすることができる。
【0044】
また複数のカメラ21、22は、高温や粉塵から守るために、ケース25に入れた状態で固定台24に設置されることが好ましい。
【0045】
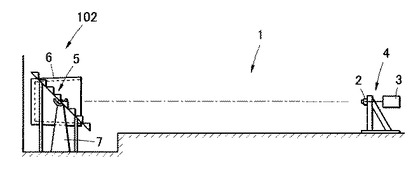
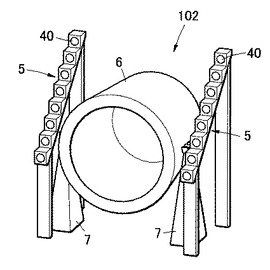
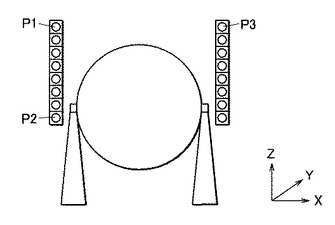
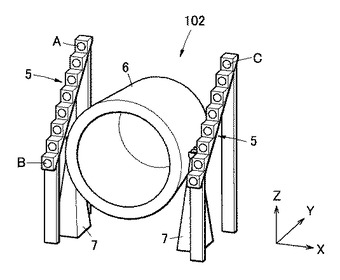
図3に示すように、測定領域102には、取鍋6が配置される。取鍋6は、クレーンによりその取鍋軸部を軸受の備わった軸受台7に搭載させ、開口部分がカメラ21、22側に向くように配置される。取鍋6の近傍には、基準点ユニット5が配置される。基準点ユニット5は、複数のレトロターゲット40を備える部材である。取鍋6は高温であるため、内部にレトロターゲット40を配置することができない。そこで図3に示すように、基準点ユニット5を取鍋の近傍に配置し、レトロターゲット40が取鍋6の周囲に位置するように構成されている。本実施形態においては、レトロターゲット40上の任意の一点を基準点41として演算に用いる。
【0046】
レトロターゲット40は、取鍋6の周囲に配置されるため、高温に対して耐熱性を有する材質で構成されることが好ましい。このため、写真測量で通常用いられる樹脂シートでつくられたレトロターゲットは、耐熱性に劣るため、本実施形態では、セラミック等の耐熱性の高いレトロターゲット40を用いる。
【0047】
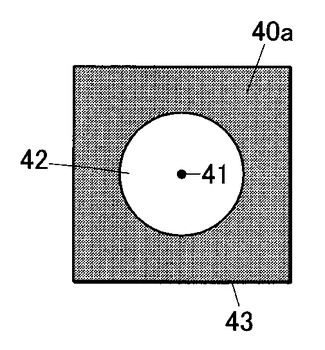
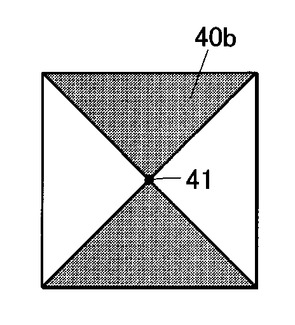
レトロターゲット40の具体的な構成としては、図4Aから図4Cに示すようなものが例示できる。図4Aに示すレトロターゲット40aは、基板43表面にガラスビーズ42を円形状に配置したターゲット40aを用いることができる。ガラスビーズ42は、カメラ撮影時のフラッシュ等の光に対して逆反射する性質をもつ。このため、カメラで撮影すると同時にフラッシュで発光された光により、レトロターゲット40aのビーズ42の円形が高輝度で撮影される。なお、レトロターゲット40は円形状である必要はなく、図4Bに示すような形状のレトロターゲット40bも用いることができる。具体的には、画像処理のためにその中心が明確に決定できるものであればよい。
【0048】
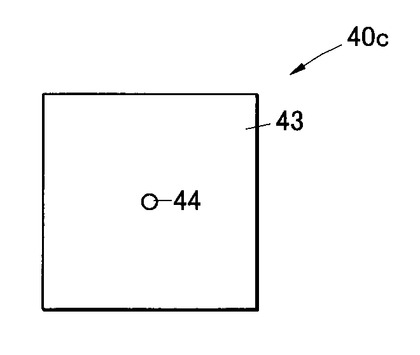
また、図4Cに示すように、レトロターゲットは、基板43の中心部に発光する光源44を配置させた構造としてもよい。図4Cに示すレトロターゲット40cに用いられる光源44としては、電球や発光ダイオードなど光を発することができるものであれば、特にその構成は問わない。この構成のレトロターゲット40cは、後述する撮影時に反射光によって基準点41が撮像されるのではなく、発光した光源を基準点として特定することができるので、照度が低い環境下においても的確に基準点を特定することができる。
【0049】
取鍋6は奥行があるため、基準点41も同様に奥行を持たせることが好ましい。したがって、図3に示すように、レトロターゲット40も取鍋の奥行方向に位置を変えて配置する。本実施形態においては、複数の基準点41が取鍋6の奥行に対して少なくとも半分以上の奥行を持つように、レトロターゲット40を配置する。本実施形態においては、基準点ユニット5は、取鍋6の高さ方向に向かうにつれてカメラから遠ざかるようにレトロターゲット40を配置する。この構成により、取鍋6の測定の精度を上げることができる。
【0050】
基準点となるレトロターゲット40は、粉塵などの異物による反射率の低下をさけるために、一部が開口したケース内に配置することが望ましい。また、レトロターゲット40の表面が粉塵により汚れるのを防止するため、基準点ユニット5は、異物を吹き飛ばすための圧縮空気を吐出可能なノズルを備えていてもよい。また、カバーの開口は、開閉可能に構成されていてもよく、撮影時にカバーが開き、撮影後に閉じるように構成されていてもよい。
【0051】
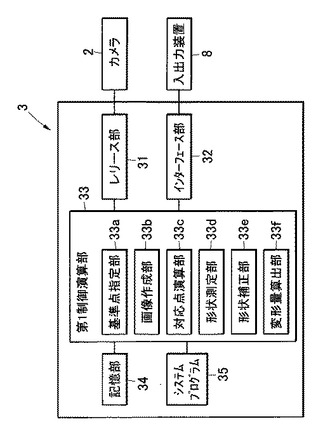
図5は、制御ユニット3の構成を示す図である。制御ユニット3は、上述のようにカメラ21,22の動作制御を行うとともに、カメラによって撮影された撮影画像を用いて、取鍋の形状を測定するための演算を行う写真測量装置として機能する。
【0052】
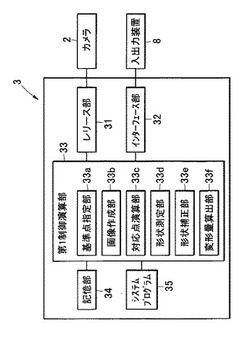
制御ユニット3は、カメラ2のレリース動作を制御するレリース部31、キーボードやマウス、ディスプレイなどの入出力装置8と接続するためのインターフェース部32、制御ユニット3の全体の制御及び各種演算を司る制御演算部33、解析される写真やデータなどの蓄積領域及び演算領域として機能する記憶部34、及びプログラムがインストールされることによってシステムプログラムとして機能するシステムプログラム35を備えている。
【0053】
制御演算部33には、後述するように、システムプログラム35により駆動され測量を実行するための機能ブロック33a〜33fが存在する。これらの各ブロックは、それぞれ単独で、または装置内の他のブロックと協働して、後述する処理を行う。
【0054】
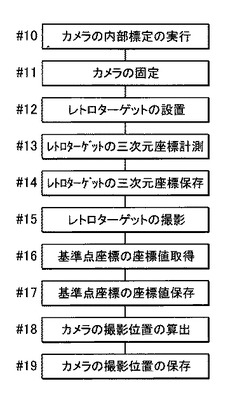
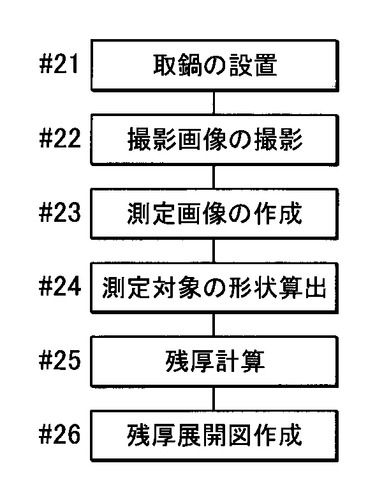
次に、本実施形態にかかる写真測量システムの制御演算部33の動作について説明する。制御演算部33は、測定対象である取鍋を測定するための動作に先立って順備作業を行う。図6は本実施形態にかかる写真測量システムを用いて測量する準備作業の手順について示すフローである。
【0055】
(部材の設置)
準備作業においては、まず、使用する複数台のカメラの内部標定を行う(#10)。次いで、内部評定されたカメラを図2のカメラ固定ユニット4に固定する(#11)。そして、レトロターゲット40を基準点ユニット5に図3に示すように配置する(#12)。この基準点の物理的な相対位置関係は、配置された基準点に対して測量機器を利用して測定される(#13)。
【0056】
測定されたレトロターゲット40の相対位置関係は、入出力装置8を用いて、当該レトロターゲット40の位置関係を示す座標としてカメラ位置の計算時に利用できるように記憶部34に保存する(#14)。この情報はカメラ校正に用いられる。
【0057】
(基準点座標の指定)
次いで、レトロターゲット40をそれぞれのカメラで撮影し(#15)、当該撮影された画像からレトロターゲット40上の基準点41の各撮影画像上での座標値を入力する(#16)。この処理は制御演算部33の基準点指定部33aによって司られる。この基準点座標の座標値の入力は、例えば、入出力装置8を用いて、マウスなどの手段により撮影画像上の各レトロターゲット40上の基準点座標近傍を手動で選択することにより行うことができる。基準点座標の検出は、入力された座標の近傍領域において、最も明るい部分の座標を検出することによって行われる。抽出された領域は円形となり、その画像重心を求めることにより、基準点座標を自動的に検出することができる。
【0058】
また、基準点ユニット5のレトロターゲット40に、コード付きターゲットを用い、服部進、秋本圭一、井本治孝:「コード付きターゲットを使った工業画像計測の自動化」、電子情報通信学会論文誌、Vol.J84-D-II,No.9,pp.2011-2019,2001.に開示されている方法を用いて、各写真における基準点座標を自動的に取得するようにしてもよい。
【0059】
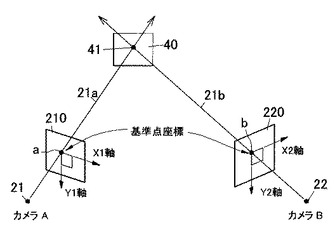
図7に写真測量システムにおける光学関係を示す。図7では、説明の便宜のために、レトロターゲット40は1つのみ表示している。図7においては、撮影位置にそれぞれ位置するカメラA21,カメラB22は、上述のように各レトロターゲット40がそれぞれ撮影される写真画像210,220に写るように配置される。ここで、レトロターゲット40の任意のポイントを基準点41として認定すると、当該基準点41は、カメラAの写真画像210には、ポイントaに写り、カメラBの写真画像220には、ポイントbとして写る。当該ポイントa,bの写真画像上の位置をそれぞれ写真画像上の基準点座標とし、XY座標を用いて特定する。
【0060】
写真画像上のX軸及びY軸は、それぞれ、カメラA21,カメラB22の光軸中心に対し、それぞれ直交する方向すなわち写真画像上に存在し、カメラの画角の横軸をX軸、カメラの画角の縦軸側をY軸とする。したがって、各写真画像上のXY座標は、それぞれ被写体に対して水平方向、鉛直方向と一致するとは限らず、また、カメラA及びカメラBにおいて被写体からみて互いに異なる方向となる。なお、画像上のどの点を原点とするかについては特に限定はしないが、本実施形態においては、各写真画像の左上角を原点として定めている。
【0061】
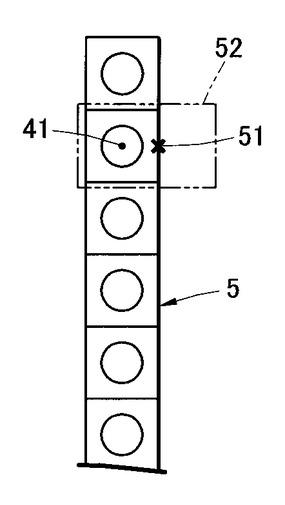
複数の基準点41の座標値の入力は、上述のように、マウスなどの入出力装置8を用いて、画像上の基準点近傍を指定することにより行う。ただし、写真画像毎に複数存在する基準点座標を手動で取得していると作業時間がかかる。そこで、例えば、前回の写真画像について指定された座標データを用い、当該基準点座標の近傍より基準点座標を画像認識などの手段によって検出してもよい。すなわち、基準点の検出方法は、図8に示すように前回の写真画像で指定された基準点座標51の近傍に基準点41があるはずである。そこでその近傍の領域52において画像の明度を調べ、ある一定以上(或いは一定以下)の明るさを持つ領域を抽出し、その重心を計算することにより、新しく撮影された画像の基準点画像座標を求めることができる。これにより、毎回の計測時に基準点画像座標を手動で対応付ける必要がなくなり、効率的に計算することができる。
【0062】
前記の方法で基準点座標を自動的に取得する場合、基準点41の近傍に発光体などがあると誤って発光体部を抽出する可能性がある。そこで、前回撮影した写真画像の基準点座標の近傍領域と、対応する新しく撮影された写真画像における前記基準点座標の近傍領域において画像相関を用いて探索することにより、その相関の最も強い領域を基準点座標とすることもできる。これにより基準点座標の正確な座値標を正確に捉えることができる。
【0063】
なお、基準点座標の座標値の入力は、後述する取鍋6の測量ごとに行うことが望ましい。図2に示すようにカメラ固定ユニット4がカメラ21,22を固定する箇所が決められていても取鍋6の周辺の環境によっては振動があり基準点が位置ずれする場合や、カメラ21,22を固定できない場合があるためである。したがって、これらの問題が発生しない場合は、取鍋6の測量ごとに基準点座標の入力を行う必要はない。
【0064】
上記のようにして入力された写真画像上での基準点の座標値は、記憶部34に保存される(#17)。そして、基準点の座標値を用いて、カメラの撮影位置の算出を行う(#18)。カメラ撮影位置とは、一方のカメラを基準として、他方のカメラがどの相対位置に存在し、どの方向を向いているかを示す情報である。これは、2つのカメラの物理的な位置及びカメラの光軸方向を三次元的に示す情報として取得される。このときの座標系は、基準となるカメラにおいて用いられる座標系を基準として表すことが好ましい。
【0065】
(カメラ撮影位置の算出)
カメラ撮影位置の算出(#18)は、先に計測された基準点の三次元座標を拘束条件として、公知の方法により行うことができる。たとえば、バンドル法、フリーネット法等で三次元座標を拘束条件として利用することで、カメラの撮影位置の計算精度を上げることができる。なお、本実施形態にかかる取鍋用写真測量システム1においては、取鍋の内面を計測するために2台のカメラの位置は近づけて固定する必要があり、カメラ間の距離が短くなる。よって、例えば、「秋本 圭一:情報化施工のためのデジタル画像計測法に関する研究,京都大学博士論文,March,2002」などに開示されている解法を用いて、カメラの撮影位置の算出を行うことにより計算精度を上げることができる。算出されたカメラ撮影位置の情報は、記憶部34に記憶される(#19)。
【0066】
カメラの撮影位置が得られたら準備作業は終了する。次いで、測定対象である取鍋の形状測量を図10Aに示す以下の手順により行う。
【0067】
(撮影画像の作成)
図1に示されるようにカメラ固定ユニット4及び基準点ユニット5等が設置されている測定領域に、計測対象である取鍋6を移動させる。取鍋6は、クレーンによりその取鍋軸部を軸受の備わった軸受台7に搭載され、かつ開口部分がカメラ固定ユニット4の方向を向くように傾けて配置される(#21)。取鍋6は、軸受台7の上に取鍋軸部を軸受部に載置するように配置するため、概ね同じ位置に配置されることになるが、完全に同じ位置及び同じ向きに取鍋6を配置することは実質的に不可能である。
【0068】
取鍋6を測定領域102に配置した後、取鍋6及び基準点ユニット5が写るようにカメラ21,22で撮影を行う(#22)。このため、2台のカメラ21,22は制御ユニット3のレリース部31から発信されるトリガ信号によって動作制御され、1つのトリガ信号を受信すると撮像するように構成されている。撮影は、取鍋の温度変化が少ないタイミングで完了するように、比較的短い時間の間に連続して行われる。
【0069】
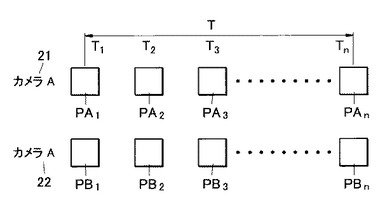
図9は、2台のカメラが取鍋を撮影するタイミングの説明図である。レリース部31から発生されるトリガ信号は、所定時間Tの間にn回発生される。したがって、所定時間Tの間にカメラA及びカメラBそれぞれは、n回の撮影を行って、n枚の写真画像を撮影画像として撮影する。ここで、所定時間Tは、例えば、5〜30秒程度であり、撮影の間の間隔は、1〜3秒程度であることが好ましい。
【0070】
カメラA及びカメラBは、レリース部31から発生されるトリガ信号を受けてそれぞれ1枚目の撮影画像PA1,PB1を撮影し、その後、所定の間隔で間欠的に発生される信号によって連続して撮影を行う。所定時間Tが経過すると、レリース部3からのトリガ信号の発生が停止され、撮影動作が終了する。
【0071】
(測定画像の作成)
2台のカメラ21,22により撮影された撮影画像は、一時的に記憶部34に記憶される。画像作成部33bは、記憶部34に記憶された撮影画像を用いて、それぞれのカメラ21,22のそれぞれについて測定画像を作成する(#23)。
【0072】
(測定画像の作成例1)
測定画像の作成は、図5の画像作成部33bにより行われる。画像作成部33bは、例えば、それぞれのカメラ21,22において連続的に撮影された撮影画像のうち、同じタイミングで撮影された1組の写真画像を測定画像として選択する。このとき、最も輝度が高く、測定対象である取鍋6のコントラストが高い写真画像を測定画像として選択することが好ましい。
【0073】
(測定画像の作成例2)
なお、対象物である取鍋6は高温であるため、カメラとの間に大気の揺らぎが存在する場合がある。よって、撮影された撮影画像は、その影響を受けることとなる。大気の揺らぎの影響は、写真測量では深刻な問題となる。通常は写真測量の原理によれば、大気の揺らぎがない場合は、カメラのレンズ中心と撮影された画像の一点を結んだ線上に撮影された物体が存在する。しかし、大気の揺らぎがある場合は、光の屈折によりこの原理が成り立たないため、正確な計測をすることが困難になる。そこでこの問題を解決するために画像作成部33bは、測定画像の作成処理において、以下の処理を行うようにしてもよい。
【0074】
大気の揺らぎの問題を解決するためには、複数のカメラ21,22で、同じ測定対象物を複数回撮影された撮影画像を用いる。固定された同一のカメラにおいて撮影時刻の異なる画像では、大気の揺らぎの影響を受けると画像の一部において、2枚の画像間で差がでるはずである。また大気の揺らぎの影響を受けていない場合は2枚の画像ではノイズの差を除いて差がないはずである。そこで、画像作成部33bは、撮影時刻の異なる2枚の撮影画像の輝度差が閾値以内の画像領域のみを抽出し、当該抽出した部分を1枚の写真画像に編集した画像を作成し、当該画像を測量画像とすることで大気の揺らぎの影響を除去した画像を作成することができる。
【0075】
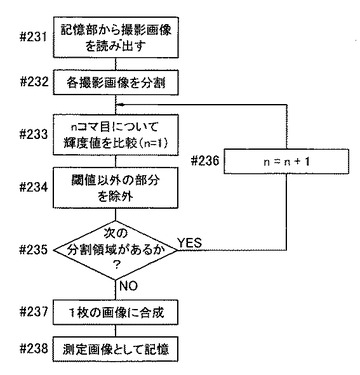
具体的には、画像作成部33bは、以下の処理を行う。図10Bは、画像作成部33bが測量画像を作成する処理(図10Aのステップ#23)の詳細処理フロー図である。なお、図10BにおいてはカメラAについてのみ詳細に説明するが、カメラBについても同様の処理がなされる。
【0076】
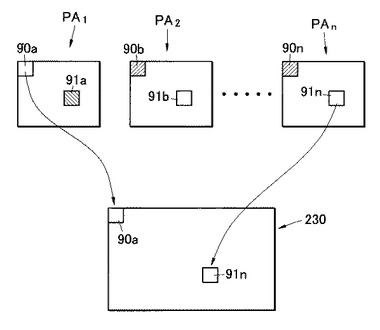
図10Cに図10Bに示す処理の説明図を示す。上記のように、記憶部34には、カメラAによって同じ撮影位置から短時間の間に撮影された複数の撮影画像PA1〜PAnが記憶されている。画像作成部33bは、これらの複数の画像を読み出し(#231)、一辺が数十画素程度の微細領域に分割する(#232)。ここで、図10Cにおいては、分割された微細領域として第1領域90a、90b、90nとし、第2領域91a、91b、91nとする。そして、微細領域ごとに複数の撮影画像間でこれらの対応する微細領域の輝度値を比較する。具体的には、1コマ目について輝度値を各画像間で比較し(#233)、各画像間の輝度差の絶対値が閾値以上の部分を除外する(#234)。ここで、閾値は、例えば、予め同一条件で撮影できる対象物を複数回撮影し、その比較値の値がカメラの色再現性であることから、比較値の最大の値として定められる。また、閾値は現場の環境によって変更できるように随時、手動で変更できるようにする。そして順次2コマ目、3コマ目というように全ての分割領域の輝度値の偏差を演算する(#235,#236)。図10Cにおいては、第1領域では、撮影画像PA2の微細領域90bの輝度差が閾値以内のため、正常を示している。また、第2領域では、撮影画像PA1の微細領域91aの輝度値の差が閾値より大きかったため、異常と判断し、削除されている状態を示している。そして、各画像から任意の微細領域のコマを合成して、1枚の画像230を作成する(#237)。ここで、合成の対象となる微細領域は、例えば、全ての撮影画像において、対応する微細領域のうち最も輝度値が高いものを選択するようにしてもよい。このようにして各微細領域が1枚に合成された画像237は、カメラAに対する測定画像として記憶部34に記憶される(#238)。
【0077】
なお、全てのカメラ21,22において同様の手順で各微細領域が合成された画像を作成し、写真計測用の測定画像とすることで大気の揺らぎの影響を除外することが可能となる。
【0078】
(測定対象の形状算出)
1組の測定画像が得られたら続いて測定対象の取鍋の形状計測を行う(#24)。形状測定は図11に示す手順により行われる。これらの一連の処理は、制御演算部33の対応点演算部33c及び形状測定部33dが処理を司る。
【0079】
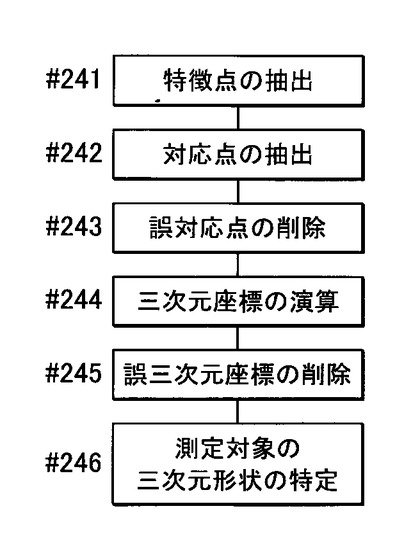
写真測量においては、三次元の形状算出を行うには、1つの測定画像から対象となる取鍋部分に対して複数の特徴点を抽出する(#241)。さらに他の測定画像に対して、先に抽出された特徴点と同一場所となる点(以下、2枚の測定画像においてそれぞれ抽出されたこれらの特徴点及び同一場所を示す点を総括して対応点と呼ぶ場合がある)を抽出する(#242)。複数の測定画像に対応付けられた対応点を用いて、三角測量の原理により、三次元座標を得ることができる。
【0080】
(特徴点の抽出)
上記処理において、問題となるのは、画像認識によって1枚の測定画像から特徴点を選ぶ処理と測定画像間での対応点の取得する場合の処理手法である。もちろん、測定画像から取鍋部分の領域のみを手動で抽出し、その領域を保存しておき、次回以降の撮影ではその領域を入力することにより、取鍋部分の特徴領域を抽出するようにしてもよい。しかし、本実施形態においては、対応点演算部33c以下の処理により、これらの処理を自動的に行う。
【0081】
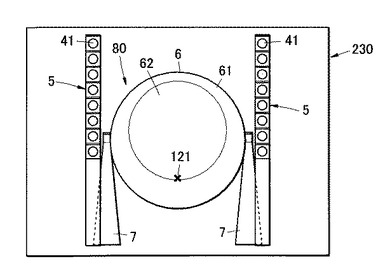
まず1の測定画像から特徴点を抽出する処理(#241)においては、測定対象が取鍋であるという特質を活かして以下のように処理を行う。図12Aは、1のカメラに対応する測定画像の画像表示例を示す図である。図12Aに示すように、測定画像230において、取鍋部分6は通常高熱により赤く発光して撮像されている。対応点演算部33cは、この発光領域を抽出する。すなわち、取鍋6の周縁に対応する部分61と取鍋の内壁に対応する部分62は、取鍋の周りに位置する背景部分80よりも赤く発光している。したがって、特徴領域の抽出としては、撮影された測定画像230に対して予め閾値が決められた明度以上の領域を抽出する。この際、他の発光部分も抽出する可能性があるので抽出された領域が一定以上の大きさの領域を取鍋部分の特徴領域とする。
【0082】
上述の画像認識によって抽出された領域は、発光していない取鍋部分を抽出できない可能性があるため、発光している領域より少し大きめの領域を取鍋の特徴領域としてもよい。このようにして得られた特徴領域内において、任意の複数の点を特徴点121として抽出する。
【0083】
(対応点の抽出)
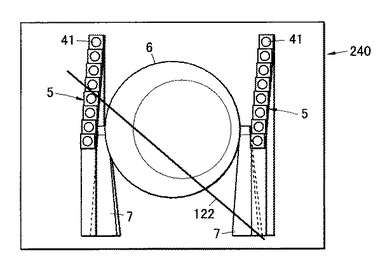
続いて対応点演算部33cは、1の測定画像において抽出された特徴点121が示す測定対象の同一箇所を、他の測定画像上において対応付ける(#242)。カメラの撮影位置が前述によって既知であり、さらに一枚の測定画像230において特徴点121が得られたので、抽出された特徴点121に対応するエピポーラ線122を他の画像240上に引くことができる。図12Bは他のカメラ22における撮影画像240の例を示す。図12Aの特徴点121に対応して、公知の方法により図12Bにエピポーラ線122を示すことができる。このエピポーラ線122上のいずれかの点に特徴点121と同一場所である点が存在することがいえるため、特徴点121を中心とする小領域の画像とエピポーラ線122上より抽出された小領域の画像の正規化相関をとることにより、対応点を抽出することができる。
【0084】
(誤対応点の削除)
しかし、前記の方法で対応付けられた点は、測定対象の同じ場所に対応付けられるとは限らない場合がある。誤って対応付けられた点を誤対応点と呼ぶが、この誤対応点を削除する必要がある。従来は、この誤対応点の削除は複数の画像を同時に表示し、対応点の位置を目視において確認しながら削除していた。しかしこの方法では時間と労力の両方がかかることになる。そこで、誤対応点の削除を以下に示す処理により自動的に処理する(#243)。
【0085】
(誤対応点の削除処理例1)
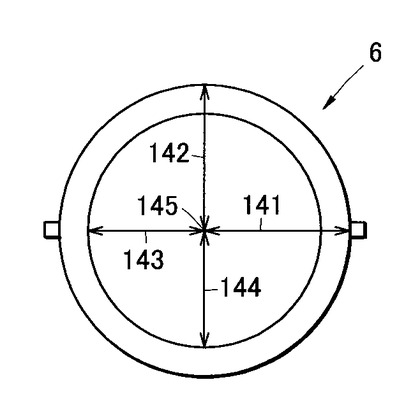
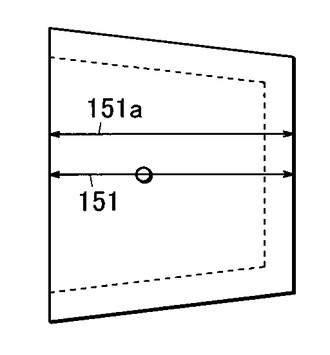
まず、取鍋6のように幾何学形状で表せるような対象物であれば、予め、その対象物の特徴となるプロフィールを設定することができる。ここでいうプロフィールとは、図13Aに示すように、取鍋6の正面図を例にとると、開口側の楕円形状を示す短径141、長径142、その中心座標145と底面の短径143、長径144、その中心座標145に関する情報である。また、図13Bに示す取鍋6の側面図を例にとると開口側と底面との長さ151及び開口の深さ151aを示す情報である。これらの値は取鍋の製造時に設計データとして取得することができる。これにより、取鍋の製造時(設計時)の三次元形状を表すことができる。
【0086】
なお、測定領域102において取鍋6を測定毎に完全に同じ配置にすることは実質的には困難であり、測定ごとに若干ずれる可能性がある。このため、測定毎にその位置補正を行う必要がある。すなわち、対応点の抽出を行う他のカメラに対する測定画像240に撮像されている取鍋の像と設計データのプロフィールが最も重なるように位置補正させて重ね合わせる。
【0087】
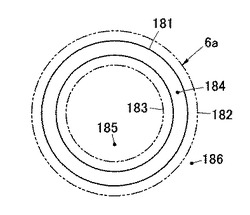
この設計データが配置された三次元形状とエピポーラ線により抽出された測定画像240上に抽出された対応点から計算される三次元座標との距離において一定の閾値から離れた三次元点は誤対応点であると判断する。図14は誤対応点の抽出の処理を説明するための図である。図14には、三次元形状である取鍋6のプロフィール181に対してその近傍領域である外側領域182及び内側領域183が示されている。この近傍領域である外側領域182及び内側領域183の中にある計測点184は正常な三次元点であり、これらの近傍領域182の外側にある三次元点185,183の内側にある三次元点186は誤対応点であると判断する。このように簡単な三次元形状であるプロフィール形状とその位置補正機能を有することで、誤対応点を自動的に削除することができ、時間と労力を削減できる。
【0088】
また、取鍋の経年変化を調べる目的であれば、測定画像に配置されるプロフィールとしては、毎回取鍋の形状を測定する必要がある。この時、一つ以上前に計測された三次元形状のデータをプロフィールとして誤対応点の削除処理に用いることができる。この場合のプロフィールとしては、取鍋の三次元形状そのものである。新たな計測時には何らかの経年変化が生じているため、プロフィールと対応点の三次元座標との距離において一定の閾値以上離れた三次元点は誤対応点であるとみなすことができる。
【0089】
(誤対応点の削除処理例2)
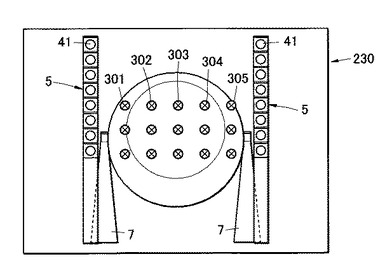
次に、誤対応点を削除する処理の別実施形態について説明する。図15は1のカメラ21によって撮影された測定画像の表示例である。この測定画像を上述のように特徴領域を特定し、当該特徴領域上に特徴点を格子状に抽出する。図15の特徴点301〜305は、格子状に抽出された特徴点の1行分を示している。この特徴点に対して上述したエピポーラ線122を用いた方法により、他の測定画像上で対応点を計算する。
【0090】
この変形例においては、他の測定画像上に対応付けられた対応点の画像座標に基づいて、誤対応点を抽出する。すなわちこの変形例では、対応点演算部33cは、このように1の測定画像上において格子状にとられた特徴点を他の測定画像上で対応付けた場合、連続する特徴点の変化に比べて急激に変化する対応点を、誤対応点であると判断する。
【0091】
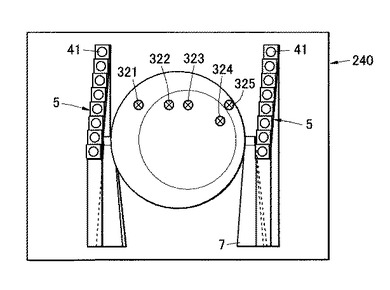
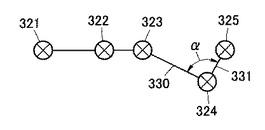
図15において、1の測定画像230上に格子状に配置された特徴点に対して他のカメラで撮影された他の測定画像上に対応付けられた対応点の例を図16Aに示す。また、図16Bは、図16Aの対応点のみを抽出した図である。図16Aにおいては、図15に示す特徴点301〜305に対する他の測定画像上の対応点321〜325を示している。ここで対応付けられた対応点321〜325は、取鍋6のように内面形状が滑らかに変化する対象物である場合、滑らかに変化するはずである。しかし、図16A、図16Bの対応点324においては、周囲の対応点の画像座標の変化に比べて急激な変化がある。対応点演算部33cは、このような画像座標は誤対応点の結果として抽出されたものであると判断する。このように格子状にとられた特徴点を対応付け、前後の対応点の変化に比べて急激に変化する対応点は誤対応点であると判断することができる。
【0092】
誤対応点を判断する場合の具体的演算手法としては、隣り合う対応点324、323が結ぶ線分330と反対側に隣り合う対応点324、325が結ぶ線分331がなす角度αがある閾値以下の変化があった場合は、誤った対応点と判断する。この閾値は、測定対象の形状によって決まるものである。このため、事前の実験により、最適な閾値を手動で設定しておくことが望ましい。
また同様に特徴点が等間隔に並んでいることを考慮すると前後の対応点座標もほぼ等間隔に並んでいると考えられるので、隣り合う対応点324、323が結ぶ線分330の長さと反対側に隣り合う対応点324、325が結ぶ線分331の長さの和がある閾値を超えた場合、誤った対応点であると判断する。この閾値は、測定対象の形状によって決まるものである。このため、事前の実験により、最適な閾値を手動で設定しておくことが望ましい。
さらに前述の角度αの閾値以下の値または距離が閾値以上の値をとった場合も誤った対応点としてもよい。
【0093】
(三次元形状の演算)
前記の方法により、複数の画像に対して、取鍋領域の対応点が自動的に抽出されると三角測量の原理により三次元座標を抽出することができる。形状測定部33dは、取鍋の三次元形状を自動的に演算する(#24)。
【0094】
(誤三次元座標の削除)
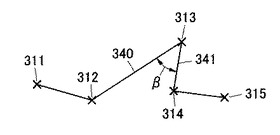
演算された三次元座標は、誤りの三次元座標を抽出する作業を行い、これを削除する処理を行う(#245)。図17は上記処理により計算された測定対象の三次元座標の一部を示している。取鍋6のように内面形状が滑らかに変化する対象物である場合、三次元座標311〜315は滑らかに変化するはずである。しかし、図17の三次元座標313においては、急激な変化がある。このような三次元座標は、先に行われた誤対応点の削除の処理(#243)において削除されずに残存した誤対応点の結果として計算されたものである。
【0095】
本実施形態においては、変化量としては、隣り合う測定対象の三次元座標313、312が結ぶ線分340と他方向に隣り合う測定対象の三次元座標313、314が結ぶ線分341がなす角度βがある閾値以下の変化があった場合は、当該角度βをなす三次元座標313を誤三次元座標として判断する。この閾値は、測定対象の形状によって決まるものである。このため、事前の実験により、最適な閾値を手動で設定しておくことが望ましい。
【0096】
さらに、誤対応点の第2の削除処理例において説明したように、特徴点を格子状に抽出した処理を行っている場合は、等間隔に並んでいることを考慮すると隣り合う三次元座標もほぼ等間隔に並んでいると考えられるので、隣り合う三次元座標313、312が結ぶ線分340の長さと他方向に隣り合う三次元座標313、314が結ぶ線分341の長さの和がある閾値を超えた場合、誤った三次元座標であると判断する。この閾値は、測定対象の形状によって決まるものである。このため、事前の実験により、最適な閾値を手動で設定しておくことが望ましい。なお、前述の角度βの閾値以下の値または距離が閾値以上の値をとった場合も誤った対応点としてもよい。
【0097】
誤った三次元座標を削除したのち、演算された三次元座標を用いて、取鍋の三次元形状を特定する(#246)。測定対象である取鍋の三次元形状が特定されると、残厚計算を行う(#25)。残厚計算は、制御演算部33の位置補正部33e及び変形量算出部33fが処理を司る。
【0098】
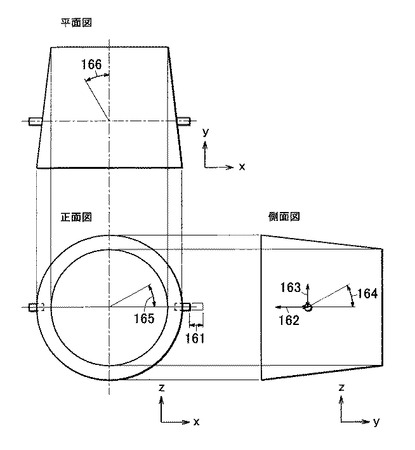
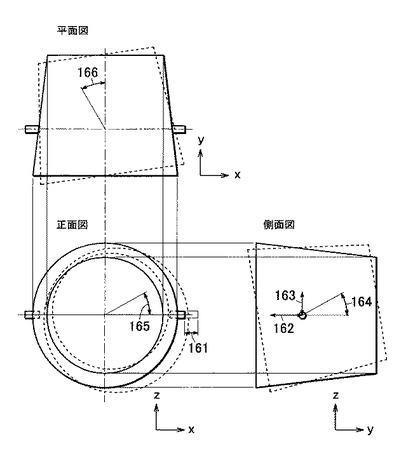
なお、残厚計算において、取鍋の残厚の位置を特定するために、三次元形状データを設計データと一致させて配置させて比較することが望ましい。このため、測定毎にえられた三次元形状データの位置補正を行う必要がある。位置補正のデータを図18に示す。図18は取鍋の平面図、正面図、側面図を示すものであり、位置補正としてX軸補正値161、Y軸補正値162、Z軸補正値163を実測する。また、角度補正として、X軸周りの角度補正値164、Y軸周りの角度補正値165、Z軸周りの角度補正値166を実測する。このように実測された位置補正値及び角度補正値を使って取鍋の三次元形状のデータを取鍋6の設計データに合わせて位置補正し、三次元位置を正確にきめることができる。
【0099】
設計データの位置補正においては、取鍋6の測定画像に撮像されている特徴部分を基準として行うことが好ましい。以下、位置補正の手順について説明する。ここでは、三次元形状データから設計データを重ねる方法を示すが、逆に設計データから三次元形状データに重ねても同様の結果が得られることを予め付記しておく。位置補正を行う前提として、配置された基準点が測量機器によって実測(#13)されているため、三次元形状データは、実測による座標系に合わせられている。
【0100】
まず、三次元形状データと設計データは同一の座標系にはないため、三次元形状データを設計データに重ねる。その手順を以下に示す。
【0101】
図20は基準点と取鍋の位置関係を含む設計データの一例である。すなわち、設計データには、取鍋の形状に関するデータのみではなく、本来取鍋が配置されるべき位置と基準点の位置との関係が含まれている。設計データ上にある直線上にない基準点を3つ選択する。選択された3つの座標点をそれぞれ、点P1(X1、Y1、Z1)点P2(X2、Y2、Z2)点P3(X3、Y3、Z3)とする。ここでは、基準点を選択したが、選択する三次元座標点は、互いに任意の直線上にない点であれば、どこでもかまわない。例えば、取鍋の軸受け部の両端と取鍋の口部でもかまわない。また、選択する点の数は3点以上でもよい。
【0102】
図21は基準点と取鍋の位置関係を含む三次元形状データの一例である。三次元形状データにある1.で選択された同一箇所の三次元座標点を3つ選択する。選択された3つの座標点をそれぞれ、点A(XA、YA、ZA)点B(XB、YB、ZB)点C(XC、YC、ZC)とする。
【0103】
三次元形状データを設計データに重ねるには上記のように選択されたお互いの3点の座標から以下の式(1)に示される方程式を解くことで求められる。
x=RX+T ---(1)
ここで、xは設計データの三次元座標ベクトル、Rは3×3の回転行列、Xは三次元形状データの三次元座標ベクトル、Tは平行移動量をあらわす併進ベクトルである。
【0104】
上記の式(1)で示される方程式は、金谷 健一著 「画像理解−三次元認識の数理」、森北出版に開示されているように、三次元形状データと設計データの選択された3点の三次元座標点から未知数である回転行列Rと併進ベクトルTを求めることができる。
【0105】
上記方程式を用いて未知数が得られたら、(1)式を用いて、三次元形状データを設計データの座標系に変換する。しかし、取鍋6は、設計図どおりの位置に配置することは難しく、このため、図22に見られるように三次元形状データの取鍋の位置(図21の点線)は、設計データからずれた位置に座標変換される。ずれた状態では、設計データからどの程度、ずれているかわからないため、変換された三次元形状データの取鍋の位置を設計データの位置に合わせるように補正する必要がある。補正方法は、図18に示すように実測された移動量であるX軸補正値161、Y軸補正値162、Z軸補正値163、および、角度補正である、X軸周りの角度補正値164、Y軸周りの角度補正値165、Z軸周りの角度補正値166を利用する。
【0106】
補正式としては、以下の式(2)で求められる。
x=MX+ΔT ---(2)
ここで、xは設計データの三次元座標ベクトル、Mは3×3の回転行列、Xは変換後の三次元形状データの三次元座標ベクトル、Tは平行移動量をあらわす併進ベクトルである。
【0107】
併進ベクトルTの三次元座標ベクトルは、X軸補正値161(Δx)、Y軸補正値162(Δy)、Z軸補正値163(Δy)を利用する。また、回転行列Mは、X軸周りの角度補正値164(ω)、Y軸周りの角度補正値165(φ)、Z軸周りの角度補正値166(κ)を利用する。具体的には、
T=(Δx、Δy、Δz)
【数1】

であらわされる。(2)式を用いることにより、三次元形状データを設計データに重ね合わせることができるようになる。
【0108】
前記の方法により、三次元形状データを設計図データに重ねることができたため、この情報を用いて座標変換された三次元形状データと設計図データを比較することにより、取鍋の経年変化を調べることができる。この手順は以下の通りである。
【0109】
まず、座標変換された三次元形状データは、点群データのため、面的な形状を持っていない。そこでまず、その点群データを利用し、三角網を貼ることを考える。三角網の貼り方としては非特許文献5に挙げられるDelauney法が適している。この方法に三次元の点群データの情報から三角網を貼ることができ、三次元形状データは面的な情報を得ることができる。
【0110】
続いて、ある特定点の残厚を計算することを考える。図23は三次元形状データと設計図データを重ねた鳥瞰図を示している。図24はその正面図を示している。図23の一点鎖線は取鍋の中心軸を示している。また、点線は中心軸上のある一点0を通る水平軸方向を示している。この水平軸からある角度θの方向の直線と三次元形状データの三角網との交点をA点とする。また同様に、設計図データとの交点をBとする。距離OBと距離OAの差が残厚となる。
【0111】
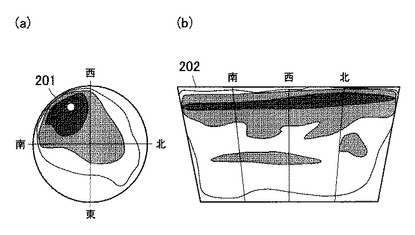
同様に角度θを0から360度まで計算すると中心軸の点Oの周りの残厚を計算することができる。また点Oを取鍋の口部から底部まで、上記の計算をすると図19に見られる取鍋の側壁の残厚を計算することができる。
【0112】
図19(b)は、取鍋の側面図である。取鍋の底面部のある一点の距離ABを計測することにより、その点の残厚を計算することができる。また、上記計算を底面全域に対して行うと、図19(a)に見られるように底面の残厚を計算することができる。
【0113】
以上説明したように、本実施形態にかかる写真測量システムによれば、測定対象である取鍋の特性により取鍋の残厚を簡単かつ正確に測定することができる。
【0114】
また、本発明の従来のレーザー式形状計や写真測量装置に比べての導入効果としては、低コスト、高精度、高速である。
【0115】
すなわち、レーザー式形状計は、高出力半導体レーザーヘッドとレーザーヘッド高速駆動装置を備えた、高価な装置である。本発明装置は、汎用のデジタルカメラと例えばパソコン、基準点を主な構成品とするため、極めて安価に仕上がる。
【0116】
また、従来のレーザー式形状計は、高温の液体状スラグコーティング面又は溶融金属面に対しては、レーザー光が散乱するため測定不可能であった。本発明装置は複数の時経列写真データより、自動的に高温揺らぎ成分を除去することが可能となり、従来レーザー測量が不可能であった1200℃以上のスラグコーティング面は勿論のこと、1800℃を超える溶融金属面の表面測量が可能となった。
【0117】
従来のレーザー式形状計は、1点あたり0.3秒程度かかり、炉を対象とした場合温度降下を避けるため、最大測定時間は数分以内となるため測定点数が数百点以内となり、全体を詳細に測量することが困難である。本発明装置は前述の時経列写真データをサンプリングするための総合時間でも10秒以内と極めて短時間で済むため、炉熱降下が最小限に抑えられるため、耐火物の亀裂を発生させず、更に省エネ効果が生まれる。
【0118】
次に、従来の写真測量装置に比べての導入効果は次の通りである。従来の写真測量装置は、コスト的にはレーザー式形状計よりも安価であるが、耐火物の残厚計測に適用する場合、撮影制御部、測定画像作成部、基準点抽出部、対応点抽出部、形状測定部、位置補正部が手動操作のため、数時間のデータ処理を必要としたため、ラボ用途に限られていた。前述の撮影制御部、測定画像作成部、基準点抽出部、対応点抽出部、形状測定部、位置補正部が手動操作のため、耐火物の残厚計測に数時間を要していた。本発明装置は撮影制御部、測定画像作成部、基準点抽出部、対応点抽出部、形状測定部、位置補正部が自動的に処理可能であるため、汎用パソコンを使ってのデータ処理においても10分以内の高速化処理を達成している。その結果、オンラインでの適用が可能となり、耐火物残厚予測精度が向上し、耐火物補修時期の最適化が図れることにより、耐火物コストミニマム化の効果を得ている。
【0119】
また、従来の写真測量装置は、1度の写真撮影より測量処理を実施するために、高温の液体状スラグコーティング面又は溶融金属面の揺らぎ部分において大きな誤差が生じており、測定不可能であった。本発明装置は複数の時経列写真データより、自動的に高温揺らぎ成分を除去することが可能となり、従来の写真測量装置が不可能であった1200℃以上のスラグコーティング面は勿論のこと、1800℃を超える溶融金属面の表面測量が可能となった。その結果、従来では耐火物残厚の管理が困難であったAOD炉等の高温炉が可能となったため、耐火物コストミニマム化の効果を得ている。
【0120】
なお、本発明は上記実施形態に限定されるものではなく、鉄鋼業以外でのその他種々の態様で実施可能である。
【図面の簡単な説明】
【0121】
【図1A】本発明の写真測量装置の一実施形態にかかる写真測量システムの全体構成を示す模式図である。
【図1B】本発明の写真測量装置の一実施形態にかかる写真測量システムの全体構成を示す模式図である。
【図2】図1Aの写真測量システムに用いられるカメラ固定ユニットの構成を示す図である。
【図3】図1Aの写真測量システムに用いられる基準点ユニットの配置箇所及び構成を示す図である。
【図4A】図1Aの写真測量システムに用いられるレトロターゲットの構成例を示す図である。
【図4B】図1Aの写真測量システムに用いられるレトロターゲットの他の構成例を示す図である。
【図4C】図1Aの写真測量システムに用いられるレトロターゲットのさらなる他の構成例を示す図である。
【図5】図1Aの写真測量システムに用いられる制御ユニットの構成を示すブロック図である。
【図6】図1Aの写真測量システムを用いて測量する準備作業の手順について示すフローである。
【図7】図1Aの写真測量システムにおける光学関係を示す図である。
【図8】基準点の検出処理を行う場合の説明図である。
【図9】2台のカメラが取鍋を撮影するタイミングの説明図である。
【図10A】図1Aの写真測量システムにおいて三次元形状を測定する処理工程を示すフロー図である。
【図10B】画像作成部が測量画像を作成する処理についての処理フロー図である。
【図10C】図10Bに示す処理の説明図である。
【図11】図10Aの測定対象の形状算出の処理における詳細フロー図である。
【図12A】1のカメラに対応する測定画像の画像表示例を示す図である。
【図12B】他のカメラに対応する測定画像の画像表示例を示す図である。
【図13A】取鍋のプロフィールを示す設計データの例を示す正面図である。
【図13B】取鍋のプロフィールを示す設計データの例を示す側面図である。
【図14】誤対応点の抽出の処理を説明する図である。
【図15】1のカメラによって撮影された測定画像の表示例である。
【図16A】1の測定画像上に格子状に配置された特徴点に対して他のカメラで撮影された他の測定画像上に対応付けられた対応点の例を示す図である。
【図16B】図16Aの対応点のみを抽出した図である。
【図17】計算された測定対象の一部の三次元座標の位置を示す図である。
【図18】取鍋の平面図、正面図、側面図を示す図である。
【図19】算出された三次元座標を用いた残厚の展開図である。
【図20】基準点と取鍋の位置関係を含む設計データの一例である。
【図21】基準点と取鍋の位置関係を含む三次元形状データの一例である。
【図22】三次元形状データの取鍋の位置を示す図である。
【図23】三次元形状データと設計図データを重ねた鳥瞰図を示す図である。
【図24】図23の正面図を示す図である。
【符号の説明】
【0122】
1 写真測量システム
2,21,22 カメラ
3 制御ユニット
4 カメラ固定ユニット
5 基準点ユニット
6 取鍋
7 軸受台
31 レリース部
32 インターフェース部
33 制御演算部
33a 基準点指定部
33b 画像作成部
33c 対応点演算部
33d 形状測定部
34 記憶部
35 システムプログラム記憶部
40,40a,40b,40c レトロターゲット
41 基準点
210、220 撮影画像
230,240 測定画像
【技術分野】
【0001】
本発明は、測定対象の形状を描くための写真測量装置及び写真測量システムに関し、更に詳述すれば鉄鋼業において、コークス炉、高炉、高炉熱風炉、転炉、電気炉、ロータリーキルン、AOD炉、VOD炉、RH炉、溶銑鍋、取鍋、トーピード、加熱炉、均熱炉等の機械構造物の内面形状又は外面形状を好適に測量可能な写真測量装置及び写真測量システムに関する。
【背景技術】
【0002】
鉄鋼業において用いられる高炉、転炉等の内面には、容器本体保護のため耐火煉瓦が内張りされている。この耐火煉瓦は、内部の溶融金属等により徐々に損耗するため、損耗の進行状況に応じて張り替える必要がある。
【0003】
内張り耐火物の損耗は、全体が均一に摩耗することはまれであり、実際は局部的に損耗することが多い。局部的損耗が所定量以上に進行した場合にも、その部分又は全部の耐火物の張り替え、上張り等の補修が必要となる。
【0004】
しかしながらこのような耐火物の補修は、容器を一旦冷却し、先に内張りされた耐火物を除去したのち、新しい耐火物を内張りしなければならない。したがって、多大の労力と時間を要し、特に転炉等においては補修作業中、操業停止となるため効率化操業の阻害要因となっている。それ故にこれらの炉においては耐火物の損耗状態を随時観察し、必要な場合には局部的損耗部にセラミック等の耐火材料を吹き付けて補修し、損耗を抑制している。
【0005】
このような補修を効率的に行うには、高温状態にある炉内の内張り耐火物の損耗状態を把握する必要が生ずるが、炉内は赤熱状態であること、ガスや高温環境のため炉近傍に近寄れないこと等の理由により目視による損耗状態の把握は困難である。このような実情のもと、従来からこれらの炉の内面形状を測定するための方法が種々提案されている。
【0006】
この方法は耐火物にレーザー光等の光を走査させるレーザー式形状計が主流となっている。これは大きく分けて投光部を炉内に設けたものと炉外に設けたものの2通りがある。前者の代表は光波距離計を用いて複数の波長に変調されたレーザーを照射し、位相差に基づき距離を求める方式やレーザーそのものの耐火物照射時の往復時間を計測する飛行時間方式である。後者の代表は測定器としてレーザーを用いるが、レーザー計本体をプローブに装着して炉内に挿入することで前者の死角も測定可能としている。この装置は例えば、特開昭54−115160号公報などに開示されている。
【0007】
しかし、従来技術に見られるレーザー式形状計はコスト上、操作上更にはレーザー取扱いの安全上、種々の問題があった。例えば、コスト上においては、レーザー式形状計本体そのものが高価であり、更に測定対象設備が回転型の転炉等には高精度かつ高価な角度計を必要とする。また、操作上においては、耐火物残厚の測定は、温度を低下させることにより耐火物亀裂を防止する観点より、操業の合間の短時間を利用することになる。そのため、レーザーによる距離測定は、1点あたり0.3秒程度かかり、測定点数も1000点未満となり、全体を詳細に把握することが困難となる。従って、レーザーを通常運用する場合、隣り合う測定点の距離が10cm程度となり、その結果クラックや局部損耗等の異常部位を発見することはできない致命的な問題が残されている。さらに、レーザー取り扱いにおいては、耐火物残厚の測定用途の場合、高出力レーザーを必要とし、そのための安全対策として遮光メガネの着用、管理区域の設定、レーザービームのストッパが必要となり、コストの増加と操作性の悪化を招いていた。
【0008】
上記のように多くの問題を備えるレーザー式形状計に変わる非接触による別の計測方法として、写真計測が考えられる。写真計測とは、測定対象が写るように、2箇所以上の場所から撮影した複数枚の画像を用い、同一個所の対応付けを行い、三角測量の原理に基づき、三次元計測する手法である。この手法は従来、航空写真を用いて地形図作成のために利用されていた。近年デジタルカメラの発達により、写真計測は対象物を選ぶことなく計測されるようになってきている。
【特許文献1】特開2004−77377号公報
【非特許文献1】徐剛著:「3次元ビジョン」、近代科学社、1998年4月
【非特許文献2】服部進、秋本圭一、井本治孝:「コード付きターゲットを使った工業画像計測の自動化」、電子情報通信学会論文誌、Vol.J84-D-II,No.9,pp.2011-2019,2001.
【非特許文献3】社団法人 日本写真測量学会:「解析写真測量 改訂版」、社団法人 日本写真測量学会・解析写真測量委員会 責任者 村井利治、昭和58年6月15日、p.126−147
【非特許文献4】秋本 圭一:情報化施工のためのデジタル画像計測法に関する研究,京都大学博士論文,March,2002
【非特許文献5】徐剛著:「写真から作る3次元CG」、近代科学社、2001年1月
【発明の開示】
【発明が解決しようとする課題】
【0009】
しかし、従来の写真計測においては、いくつかの問題を含んでいる。一つ目は、カメラの撮影位置を計算するために、2つの画像間で対応付け、撮影位置を算出する作業である。この作業は人の手によって行われるため、精度が不安定になることがある。また作業時間もかかっているのが現状である。二つ目は、測定対象の詳細な形状を得るために、対応点の数を増やす作業である。この作業は、画像相関などの手法により、ある程度自動化されているものの、誤った対応点が発生していた。この誤った対応点は、人の手により、修正をおこなっていたため、非常に多くの時間を費やしていた。
【0010】
したがって、本発明が解決しようとする技術的課題は、写真測量を用いた測定対象の三次元形状の測定において、処理を自動化することによって手間を省略するとともに、より正確に測定することができる写真測量装置及び写真測量システムを提供することである。
【課題を解決するための手段】
【0011】
本発明は、上記技術的課題を解決するために、以下の構成の写真測量装置を提供する。
【0012】
本発明の第1態様によれば、撮影装置によって異なる複数の位置から撮影した画像を用いて測量対象の三次元形状を測量する写真測量装置であって、
測定対象周辺に配置した複数の基準点を含む空間を撮影する複数の前記撮影装置の撮影動作を制御する撮影制御部と、
前記撮影制御部の動作により前記複数の撮影装置で撮影された撮影画像を用いて、それぞれの撮影装置に対応する測定画像を作成する測定画像作成部と、
前記測定画像からそれぞれの撮影装置に対応する測定画像に共通する基準点の対応点座標を抽出する基準点抽出部と、
前記測定画像からそれぞれの撮影装置に対応する測定画像に共通する測定対象について特定された特徴点の特徴点座標と当該特徴点について他の測定画像上で対応づけられた対応点の対応点座標を抽出する対応点抽出部と、
前記特徴点座標と対応点座標から前記対応点の三次元的な位置情報を求め、前記対応点の位置情報に基づいて、前記測定対象の三次元形状を求める形状測定部と、
前記形状測定部によって求められた対応点の三次元位置と前記測定対象の設計データによって決定されている前記測定対象の基準位置との誤差補正を行い、前記測定対象の三次元位置を補正する位置補正部とを備えることを特徴とする、写真測量装置を提供する。
【0013】
また、本発明の第2態様によれば、撮影装置によって異なる複数の位置から撮影した画像を用いて測量対象の三次元形状を測量し、記憶部に記憶されている前記測量対象の設計データと前記測量対象の三次元形状とを比較して、測量対象と前記設計データとの形状の差を演算する写真測量装置であって、
測定対象周辺に配置した複数の基準点を含む空間を撮影する複数の前記撮影装置の撮影動作を制御する撮影制御部と、
前記撮影制御部の動作により前記複数の撮影装置で撮影された撮影画像を用いて、それぞれの撮影装置に対応する測定画像を作成する測定画像作成部と、
前記測定画像からそれぞれの撮影装置に対応する測定画像に共通する基準点の対応点座標を抽出する基準点抽出部と、
前記測定画像からそれぞれの撮影装置に対応する測定画像に共通する測定対象の共通の対応点座標を抽出する対応点抽出部と、
前記対応点座標から前記対応点の三次元的な位置情報を求め、前記対応点の位置情報に基づいて、前記測定対象の三次元形状を求める形状測定部と、
前記形状測定部によって求められた基準点の三次元位置と前記設計データによって決定されている前記測定対象の基準位置との誤差補正を行い、前記測定対象の三次元位置を補正する位置補正部と、
前記位置補正部により補正された三次元形状と前記設計データを比較することによって、前記測定対象の変形箇所の位置と変形量とを算出する変形量算出部とを備えることを特徴とする、写真測量装置を提供する。
【0014】
本発明の第3態様によれば、前記撮影制御部は、前記複数の撮影装置を1つのトリガ信号によって同時に撮影制御することを特徴とする、第1又は第2態様の写真測量装置を提供する。
【0015】
本発明の第4態様によれば、前記撮影制御部は、前記トリガ信号を間欠的に複数回発生させ、前記複数の撮影装置によって同時に連続的に撮影が行われるように撮影制御することを特徴とする、第3態様の写真測量装置を提供する。
【0016】
本発明の第5態様によれば、前記測定画像作成部は、任意の複数の写真画像を抽出する手段が全ての撮影装置において撮影時刻が同じ1組の撮影画像を選択し、当該撮影画像を測定画像とするように構成されていることを特徴とする、第1から第4態様のいずれか1つの写真測量装置を提供する。
【0017】
本発明の第6態様によれば、前記測定画像作成部は、個々の撮影装置において前記連続的に撮影された複数の撮影画像について、前記複数の撮影画像を微細領域に分割して撮影画像上の任意の輝度が同一の部分に相当する微細領域の輝度の差分処理を行う差分処理部と、
前記差分処理部により差分処理された部分の輝度差が閾値以内のもののみを用いて、新たな写真画像に編集する画像編集部を備え、
前記それぞれの撮影装置ごとに前記画像編集部によって編集された写真画像を測定画像とすることを特徴とする、第5態様の写真測量装置を提供する。
【0018】
本発明の第7態様によれば、前記基準点抽出部は、先の測量時に用いられた測定画像において抽出された基準点座標である事前基準点座標の近傍の範囲を走査し、前記測定画像から基準点座標を抽出することを特徴とする、第1から第6態様の写真測量装置を提供する。
【0019】
本発明の第8態様によれば、前記対応点抽出部は、先の測量時に用いられた測定画像において抽出された対応点座標である前記事前対応点座標の近傍の範囲を走査し、前記測定画像から対応点座標を抽出することを特徴とする、第1から第6態様のいずれか1つの写真測量装置を提供する。
【0020】
本発明の第9態様によれば、前記形状測定部によって得られた三次元座標を前記設計データと比較し、前記設計データにより特定される三次元形状から所定距離以上離れた点として求められた三次元座標を除いて、前記測定対象の三次元形状を特定することを特徴とする、第2から第8態様のいずれか1つの写真測量装置を提供する。
【0021】
本発明の第10態様によれば、対応点抽出部は、複数の測定画像について、測定対象の同じ場所を画像相関により対応付ける対応点設定部と、
前記対応点設定部により対応づけられた点の真偽を判定する誤対応点抽出部とを備え、 前記誤対応点抽出部は、1つの測定対象について特定された特徴点について対応づけられた対応点から得られる三次元座標と、予め用意された測定対象の三次元形状のデータを比較し、前記対応点から得られる三次元座標が、測定対象の三次元形状の近傍にない対応点を誤りであると判定することを特徴とする、第1から第9態様のいずれか1つの写真測量装置を提供する。
【0022】
本発明の第11態様によれば、測定対象の前記三次元形状のデータは、前記測定対象の設計データであることを特徴とする、第10態様に記載の写真測量装置を提供する。
【0023】
本発明の第12態様によれば、測定対象の前記三次元幾何形状のデータは、前記測定対象について、先の測量時に測量された三次元計測データであることを特徴とする、第10態様の写真測量装置を提供する。
【0024】
本発明の第13態様によれば、対応点抽出部は、複数の測定画像について、測定対象の同じ場所を画像相関により対応付ける対応点設定部と、
前記対応点設定部により対応づけられた点の真偽を判定する誤対応点抽出部とを備え、
前記対応点設定部は、任意の1の測定画像に設定する特徴点を任意に特定された配置となるように設定し、前記設定された特徴点に対応するように他の測定画像上に対応点を設定し、
前記誤対応点抽出部は、対象となる前記対応点の周囲に配置された対応点の配置が、前記特徴点において特定された配置と比較して閾値を越える変化を有するときは、当該対象となる対応点が誤対応点であると判断することを特徴とする、第1から第9態様のいずれかの写真測量装置を提供する。
【0025】
本発明の第14態様によれば、前記対応点設定部は、前記任意の1の測定画像に設定する特徴点を格子状配置となるように設定することを特徴とする、第13態様の写真測量装置を提供する。
【0026】
本発明の第15態様によれば、前記誤対応点抽出部は、前記対象となる対応点に隣接する1つの対応点を結ぶ直線と、前記対象となる前記隣接する対応点の反対側に隣接する対応点とを結ぶ直線とがなす角度が、閾値を越える場合に、前記対象となる対応点が誤対応点であると判断する、第13又は第14態様の写真測量装置を提供する。
【0027】
本発明の第16態様によれば、前記誤対応点抽出部は、前記対象となる対応点に隣接する対応点を結ぶ直線Aと、前記対象となる前記隣接する対応点の反対側に隣接する対応点とを結ぶ直線Bとの長さの和が、閾値を越える場合に、前記対象となる対応点が誤対応点であると判断する、写真測量システムを提供する。
【0028】
本発明の第17態様によれば、第1から第16態様のいずれか1つに記載の写真測量装置と、前記測定対象の近傍に配置され前記基準点として機能するターゲットを複数固定する基準点ユニットと、前記複数の撮影装置を前記基準点ユニットと前記測定対象が撮影できるような位置に固定可能に構成されたカメラ固定ユニットとを備えた写真測量システムであって、
前記基準点ユニットは、前記ターゲットを前記撮影装置により撮影される測定対象のX、Y、Z軸の各成分別に、測定対象の最大距離の半分以上の距離を置いて配置されることを特徴とする、写真測量システムを提供する。
【0029】
本発明の第18態様によれば、第1から第16態様のいずれか1つに記載の写真測量装置と、前記測定対象の近傍に配置され前記基準点として機能するターゲットを複数固定する基準点ユニットと、前記複数の撮影装置を前記基準点ユニットと前記測定対象が撮影できるような位置に固定可能に構成されたカメラ固定ユニットとを備えた写真測量システムであって、
前記ターゲットは、発光部を備え、前記写真測量装置は前記発光部からの光を前記基準点して前記撮影装置により撮影することを特徴とする、写真測量システムを提供する。
【0030】
なお、本発明の説明に用いる用語は、次の意味を有するものとする。
【0031】
「撮影装置」とは、測定対象及び基準点を被写体として光学撮影可能であり、かつ当該撮影された画像を電子情報として作成可能な装置を意味する。例えば、デジタルカメラなどが例示できるが、銀塩カメラと銀塩カメラにより撮影された写真を画像情報として変換可能なスキャナとを備えるユニットで構成されていてもよい。
【0032】
「撮影画像」とは、測定対象及び基準点を被写体として撮影装置で撮影された写真画像をいう。撮影画像は、一回の測量に1つの撮影装置について複数枚存在していてもよく、1枚のみであってもよい。また、任意のタイミングの静止画を抽出可能な動画であってもよい。
【0033】
「測定画像」とは、それぞれの撮影装置につき、測量演算に用いるために撮影画像を用いて測定画像作成部により作成される静止画の画像である。撮影画像が複数である場合は、複数の撮影画像のうちの1枚をそのまま測定画像としてもよいし、複数の撮影画像を部分的に用いて測定画像を画像合成により作成してもよい。測定画像は、それぞれの撮影装置に対応して1枚ずつ作成されるものであり、測定対象の形状を写真測量の原理で測定する場合に用いられる画像となる。
【0034】
「測定対象の三次元形状」とは、測定対象について写真測量された結果として得られる測定対象の物理的な形状を意味し、当該測定対象上に位置する多数の点の三次元座標値を認識可能なものである。三次元形状のデータは、必ずしも多数の点の三次元座標値の集合として表されている必要はなく、CADなどの設計図面データなどで与えられていてもよいが、任意の点の三次元座標値を認識できるものである必要がある。
【0035】
「特徴点」とは、1組の測定画像のうち基準となる1の測定画像上に配置された点である。特徴点は、測定対象の三次元形状の算出に用いられるものであり、任意に設定することができる。
【0036】
「対応点」とは、1組の測定画像のうち基準とならなかった他の測定画像上において、特徴点において示される被写体上の同じ点を示す点である。対応点は、測定対象の三次元形状の算出に用いられるものであり、特徴点と同じ被写体上の点を示すものであるから、特徴点と同様の配置で他の画像上に表されることが多い。
【発明の効果】
【0037】
本発明によれば、測定対象の形状を写真測量によって測定することができるとともに、設計データに合わせて誤差補正を行うことで測定対象の変形箇所の位置と変形量とを確実かつ容易に算出することができる。
【発明を実施するための最良の形態】
【0038】
次に、本発明の写真測量装置の実施形態にかかる写真測量システムについて説明する。図1A及び図1Bは、本発明の写真測量装置の一実施形態にかかる写真測量システムの全体構成を示す模式図である。以下、本システムを製鉄所において用いられる取鍋の内面形状の測定に用いた取鍋用写真測量システムを例にとって説明する。図1Bに示すように本実施形態にかかる写真測量システム1は、測定対象である取鍋6を製鉄作業領域101から測定領域102へ移動させるクレーンを備える。写真測量システム1は、当該測定領域102に配置された取鍋を写真測量の原理により測量する。
【0039】
図1Aに示すように、取鍋用写真測量システム1は、測定対象となる取鍋6の内面を撮影するための複数のカメラ2をカメラ固定ユニット4に配置している。写真測量の原理によれば、カメラは最低2台があれば、計測することが可能である。なお、精度をあげるために3つ以上カメラを設置してもよい。
【0040】
また、取鍋用写真測量システム1には、制御ユニット3が設けられている。制御ユニットは、それぞれのカメラで撮影された写真画像を用いて取鍋の形状計測の処理を行う写真測量装置として機能する。当該制御ユニット3の構成及び処理の詳細については後述する。
【0041】
本実施形態にかかる写真測量システムに用いられるカメラ2は、予め内部標定が行われたものを用いることで測定精度を向上させることができる。内部標定とはカメラ特有のパラメータであり、焦点距離、主点位置、歪み補正値を表すものである。内部標定の方法は公知の方法により行うことができる。なお、内部評定は、複数のカメラ2のそれぞれについて行われる。
【0042】
図2はカメラ固定ユニットの構成を示す図である。カメラ固定ユニット4は、カメラ固定台24の上に、2台のデジタルスチルカメラ21、22を備える。本実施形態においては、カメラ21,22は、それぞれ3000画素×4000画素の画像を撮影することができるデジタルカメラが用いられている。それぞれのカメラ21、22の相対的な位置関係は、後述する処理によって算出され、制御ユニット3の記憶部に格納される。
【0043】
また、2台のカメラ21、22は、制御ユニット3からの信号を受けて、同じタイミングで撮影可能に構成されている。同じタイミングで撮影することにより、2台のカメラ21、22で撮影された取鍋内面の温度変化による測定誤差の影響を受けにくくすることができ、取鍋6の熱による寸法変化などの問題を少なくすることができる。これに対して1台のカメラを用いて撮影場所を異ならせて撮影する場合、その移動中に取鍋内面の温度が変化する。このため、得られた複数の画像は取鍋の温度変化の影響を受け、画像が変化する。よって、後述する複数枚の画像間で行われる対応付けが、温度変化のために困難となる可能性がある。すなわち、複数のカメラを同時に撮影可能とすることにより、それぞれのカメラで撮影された画像の対応付けを容易にすることができる。
【0044】
また複数のカメラ21、22は、高温や粉塵から守るために、ケース25に入れた状態で固定台24に設置されることが好ましい。
【0045】
図3に示すように、測定領域102には、取鍋6が配置される。取鍋6は、クレーンによりその取鍋軸部を軸受の備わった軸受台7に搭載させ、開口部分がカメラ21、22側に向くように配置される。取鍋6の近傍には、基準点ユニット5が配置される。基準点ユニット5は、複数のレトロターゲット40を備える部材である。取鍋6は高温であるため、内部にレトロターゲット40を配置することができない。そこで図3に示すように、基準点ユニット5を取鍋の近傍に配置し、レトロターゲット40が取鍋6の周囲に位置するように構成されている。本実施形態においては、レトロターゲット40上の任意の一点を基準点41として演算に用いる。
【0046】
レトロターゲット40は、取鍋6の周囲に配置されるため、高温に対して耐熱性を有する材質で構成されることが好ましい。このため、写真測量で通常用いられる樹脂シートでつくられたレトロターゲットは、耐熱性に劣るため、本実施形態では、セラミック等の耐熱性の高いレトロターゲット40を用いる。
【0047】
レトロターゲット40の具体的な構成としては、図4Aから図4Cに示すようなものが例示できる。図4Aに示すレトロターゲット40aは、基板43表面にガラスビーズ42を円形状に配置したターゲット40aを用いることができる。ガラスビーズ42は、カメラ撮影時のフラッシュ等の光に対して逆反射する性質をもつ。このため、カメラで撮影すると同時にフラッシュで発光された光により、レトロターゲット40aのビーズ42の円形が高輝度で撮影される。なお、レトロターゲット40は円形状である必要はなく、図4Bに示すような形状のレトロターゲット40bも用いることができる。具体的には、画像処理のためにその中心が明確に決定できるものであればよい。
【0048】
また、図4Cに示すように、レトロターゲットは、基板43の中心部に発光する光源44を配置させた構造としてもよい。図4Cに示すレトロターゲット40cに用いられる光源44としては、電球や発光ダイオードなど光を発することができるものであれば、特にその構成は問わない。この構成のレトロターゲット40cは、後述する撮影時に反射光によって基準点41が撮像されるのではなく、発光した光源を基準点として特定することができるので、照度が低い環境下においても的確に基準点を特定することができる。
【0049】
取鍋6は奥行があるため、基準点41も同様に奥行を持たせることが好ましい。したがって、図3に示すように、レトロターゲット40も取鍋の奥行方向に位置を変えて配置する。本実施形態においては、複数の基準点41が取鍋6の奥行に対して少なくとも半分以上の奥行を持つように、レトロターゲット40を配置する。本実施形態においては、基準点ユニット5は、取鍋6の高さ方向に向かうにつれてカメラから遠ざかるようにレトロターゲット40を配置する。この構成により、取鍋6の測定の精度を上げることができる。
【0050】
基準点となるレトロターゲット40は、粉塵などの異物による反射率の低下をさけるために、一部が開口したケース内に配置することが望ましい。また、レトロターゲット40の表面が粉塵により汚れるのを防止するため、基準点ユニット5は、異物を吹き飛ばすための圧縮空気を吐出可能なノズルを備えていてもよい。また、カバーの開口は、開閉可能に構成されていてもよく、撮影時にカバーが開き、撮影後に閉じるように構成されていてもよい。
【0051】
図5は、制御ユニット3の構成を示す図である。制御ユニット3は、上述のようにカメラ21,22の動作制御を行うとともに、カメラによって撮影された撮影画像を用いて、取鍋の形状を測定するための演算を行う写真測量装置として機能する。
【0052】
制御ユニット3は、カメラ2のレリース動作を制御するレリース部31、キーボードやマウス、ディスプレイなどの入出力装置8と接続するためのインターフェース部32、制御ユニット3の全体の制御及び各種演算を司る制御演算部33、解析される写真やデータなどの蓄積領域及び演算領域として機能する記憶部34、及びプログラムがインストールされることによってシステムプログラムとして機能するシステムプログラム35を備えている。
【0053】
制御演算部33には、後述するように、システムプログラム35により駆動され測量を実行するための機能ブロック33a〜33fが存在する。これらの各ブロックは、それぞれ単独で、または装置内の他のブロックと協働して、後述する処理を行う。
【0054】
次に、本実施形態にかかる写真測量システムの制御演算部33の動作について説明する。制御演算部33は、測定対象である取鍋を測定するための動作に先立って順備作業を行う。図6は本実施形態にかかる写真測量システムを用いて測量する準備作業の手順について示すフローである。
【0055】
(部材の設置)
準備作業においては、まず、使用する複数台のカメラの内部標定を行う(#10)。次いで、内部評定されたカメラを図2のカメラ固定ユニット4に固定する(#11)。そして、レトロターゲット40を基準点ユニット5に図3に示すように配置する(#12)。この基準点の物理的な相対位置関係は、配置された基準点に対して測量機器を利用して測定される(#13)。
【0056】
測定されたレトロターゲット40の相対位置関係は、入出力装置8を用いて、当該レトロターゲット40の位置関係を示す座標としてカメラ位置の計算時に利用できるように記憶部34に保存する(#14)。この情報はカメラ校正に用いられる。
【0057】
(基準点座標の指定)
次いで、レトロターゲット40をそれぞれのカメラで撮影し(#15)、当該撮影された画像からレトロターゲット40上の基準点41の各撮影画像上での座標値を入力する(#16)。この処理は制御演算部33の基準点指定部33aによって司られる。この基準点座標の座標値の入力は、例えば、入出力装置8を用いて、マウスなどの手段により撮影画像上の各レトロターゲット40上の基準点座標近傍を手動で選択することにより行うことができる。基準点座標の検出は、入力された座標の近傍領域において、最も明るい部分の座標を検出することによって行われる。抽出された領域は円形となり、その画像重心を求めることにより、基準点座標を自動的に検出することができる。
【0058】
また、基準点ユニット5のレトロターゲット40に、コード付きターゲットを用い、服部進、秋本圭一、井本治孝:「コード付きターゲットを使った工業画像計測の自動化」、電子情報通信学会論文誌、Vol.J84-D-II,No.9,pp.2011-2019,2001.に開示されている方法を用いて、各写真における基準点座標を自動的に取得するようにしてもよい。
【0059】
図7に写真測量システムにおける光学関係を示す。図7では、説明の便宜のために、レトロターゲット40は1つのみ表示している。図7においては、撮影位置にそれぞれ位置するカメラA21,カメラB22は、上述のように各レトロターゲット40がそれぞれ撮影される写真画像210,220に写るように配置される。ここで、レトロターゲット40の任意のポイントを基準点41として認定すると、当該基準点41は、カメラAの写真画像210には、ポイントaに写り、カメラBの写真画像220には、ポイントbとして写る。当該ポイントa,bの写真画像上の位置をそれぞれ写真画像上の基準点座標とし、XY座標を用いて特定する。
【0060】
写真画像上のX軸及びY軸は、それぞれ、カメラA21,カメラB22の光軸中心に対し、それぞれ直交する方向すなわち写真画像上に存在し、カメラの画角の横軸をX軸、カメラの画角の縦軸側をY軸とする。したがって、各写真画像上のXY座標は、それぞれ被写体に対して水平方向、鉛直方向と一致するとは限らず、また、カメラA及びカメラBにおいて被写体からみて互いに異なる方向となる。なお、画像上のどの点を原点とするかについては特に限定はしないが、本実施形態においては、各写真画像の左上角を原点として定めている。
【0061】
複数の基準点41の座標値の入力は、上述のように、マウスなどの入出力装置8を用いて、画像上の基準点近傍を指定することにより行う。ただし、写真画像毎に複数存在する基準点座標を手動で取得していると作業時間がかかる。そこで、例えば、前回の写真画像について指定された座標データを用い、当該基準点座標の近傍より基準点座標を画像認識などの手段によって検出してもよい。すなわち、基準点の検出方法は、図8に示すように前回の写真画像で指定された基準点座標51の近傍に基準点41があるはずである。そこでその近傍の領域52において画像の明度を調べ、ある一定以上(或いは一定以下)の明るさを持つ領域を抽出し、その重心を計算することにより、新しく撮影された画像の基準点画像座標を求めることができる。これにより、毎回の計測時に基準点画像座標を手動で対応付ける必要がなくなり、効率的に計算することができる。
【0062】
前記の方法で基準点座標を自動的に取得する場合、基準点41の近傍に発光体などがあると誤って発光体部を抽出する可能性がある。そこで、前回撮影した写真画像の基準点座標の近傍領域と、対応する新しく撮影された写真画像における前記基準点座標の近傍領域において画像相関を用いて探索することにより、その相関の最も強い領域を基準点座標とすることもできる。これにより基準点座標の正確な座値標を正確に捉えることができる。
【0063】
なお、基準点座標の座標値の入力は、後述する取鍋6の測量ごとに行うことが望ましい。図2に示すようにカメラ固定ユニット4がカメラ21,22を固定する箇所が決められていても取鍋6の周辺の環境によっては振動があり基準点が位置ずれする場合や、カメラ21,22を固定できない場合があるためである。したがって、これらの問題が発生しない場合は、取鍋6の測量ごとに基準点座標の入力を行う必要はない。
【0064】
上記のようにして入力された写真画像上での基準点の座標値は、記憶部34に保存される(#17)。そして、基準点の座標値を用いて、カメラの撮影位置の算出を行う(#18)。カメラ撮影位置とは、一方のカメラを基準として、他方のカメラがどの相対位置に存在し、どの方向を向いているかを示す情報である。これは、2つのカメラの物理的な位置及びカメラの光軸方向を三次元的に示す情報として取得される。このときの座標系は、基準となるカメラにおいて用いられる座標系を基準として表すことが好ましい。
【0065】
(カメラ撮影位置の算出)
カメラ撮影位置の算出(#18)は、先に計測された基準点の三次元座標を拘束条件として、公知の方法により行うことができる。たとえば、バンドル法、フリーネット法等で三次元座標を拘束条件として利用することで、カメラの撮影位置の計算精度を上げることができる。なお、本実施形態にかかる取鍋用写真測量システム1においては、取鍋の内面を計測するために2台のカメラの位置は近づけて固定する必要があり、カメラ間の距離が短くなる。よって、例えば、「秋本 圭一:情報化施工のためのデジタル画像計測法に関する研究,京都大学博士論文,March,2002」などに開示されている解法を用いて、カメラの撮影位置の算出を行うことにより計算精度を上げることができる。算出されたカメラ撮影位置の情報は、記憶部34に記憶される(#19)。
【0066】
カメラの撮影位置が得られたら準備作業は終了する。次いで、測定対象である取鍋の形状測量を図10Aに示す以下の手順により行う。
【0067】
(撮影画像の作成)
図1に示されるようにカメラ固定ユニット4及び基準点ユニット5等が設置されている測定領域に、計測対象である取鍋6を移動させる。取鍋6は、クレーンによりその取鍋軸部を軸受の備わった軸受台7に搭載され、かつ開口部分がカメラ固定ユニット4の方向を向くように傾けて配置される(#21)。取鍋6は、軸受台7の上に取鍋軸部を軸受部に載置するように配置するため、概ね同じ位置に配置されることになるが、完全に同じ位置及び同じ向きに取鍋6を配置することは実質的に不可能である。
【0068】
取鍋6を測定領域102に配置した後、取鍋6及び基準点ユニット5が写るようにカメラ21,22で撮影を行う(#22)。このため、2台のカメラ21,22は制御ユニット3のレリース部31から発信されるトリガ信号によって動作制御され、1つのトリガ信号を受信すると撮像するように構成されている。撮影は、取鍋の温度変化が少ないタイミングで完了するように、比較的短い時間の間に連続して行われる。
【0069】
図9は、2台のカメラが取鍋を撮影するタイミングの説明図である。レリース部31から発生されるトリガ信号は、所定時間Tの間にn回発生される。したがって、所定時間Tの間にカメラA及びカメラBそれぞれは、n回の撮影を行って、n枚の写真画像を撮影画像として撮影する。ここで、所定時間Tは、例えば、5〜30秒程度であり、撮影の間の間隔は、1〜3秒程度であることが好ましい。
【0070】
カメラA及びカメラBは、レリース部31から発生されるトリガ信号を受けてそれぞれ1枚目の撮影画像PA1,PB1を撮影し、その後、所定の間隔で間欠的に発生される信号によって連続して撮影を行う。所定時間Tが経過すると、レリース部3からのトリガ信号の発生が停止され、撮影動作が終了する。
【0071】
(測定画像の作成)
2台のカメラ21,22により撮影された撮影画像は、一時的に記憶部34に記憶される。画像作成部33bは、記憶部34に記憶された撮影画像を用いて、それぞれのカメラ21,22のそれぞれについて測定画像を作成する(#23)。
【0072】
(測定画像の作成例1)
測定画像の作成は、図5の画像作成部33bにより行われる。画像作成部33bは、例えば、それぞれのカメラ21,22において連続的に撮影された撮影画像のうち、同じタイミングで撮影された1組の写真画像を測定画像として選択する。このとき、最も輝度が高く、測定対象である取鍋6のコントラストが高い写真画像を測定画像として選択することが好ましい。
【0073】
(測定画像の作成例2)
なお、対象物である取鍋6は高温であるため、カメラとの間に大気の揺らぎが存在する場合がある。よって、撮影された撮影画像は、その影響を受けることとなる。大気の揺らぎの影響は、写真測量では深刻な問題となる。通常は写真測量の原理によれば、大気の揺らぎがない場合は、カメラのレンズ中心と撮影された画像の一点を結んだ線上に撮影された物体が存在する。しかし、大気の揺らぎがある場合は、光の屈折によりこの原理が成り立たないため、正確な計測をすることが困難になる。そこでこの問題を解決するために画像作成部33bは、測定画像の作成処理において、以下の処理を行うようにしてもよい。
【0074】
大気の揺らぎの問題を解決するためには、複数のカメラ21,22で、同じ測定対象物を複数回撮影された撮影画像を用いる。固定された同一のカメラにおいて撮影時刻の異なる画像では、大気の揺らぎの影響を受けると画像の一部において、2枚の画像間で差がでるはずである。また大気の揺らぎの影響を受けていない場合は2枚の画像ではノイズの差を除いて差がないはずである。そこで、画像作成部33bは、撮影時刻の異なる2枚の撮影画像の輝度差が閾値以内の画像領域のみを抽出し、当該抽出した部分を1枚の写真画像に編集した画像を作成し、当該画像を測量画像とすることで大気の揺らぎの影響を除去した画像を作成することができる。
【0075】
具体的には、画像作成部33bは、以下の処理を行う。図10Bは、画像作成部33bが測量画像を作成する処理(図10Aのステップ#23)の詳細処理フロー図である。なお、図10BにおいてはカメラAについてのみ詳細に説明するが、カメラBについても同様の処理がなされる。
【0076】
図10Cに図10Bに示す処理の説明図を示す。上記のように、記憶部34には、カメラAによって同じ撮影位置から短時間の間に撮影された複数の撮影画像PA1〜PAnが記憶されている。画像作成部33bは、これらの複数の画像を読み出し(#231)、一辺が数十画素程度の微細領域に分割する(#232)。ここで、図10Cにおいては、分割された微細領域として第1領域90a、90b、90nとし、第2領域91a、91b、91nとする。そして、微細領域ごとに複数の撮影画像間でこれらの対応する微細領域の輝度値を比較する。具体的には、1コマ目について輝度値を各画像間で比較し(#233)、各画像間の輝度差の絶対値が閾値以上の部分を除外する(#234)。ここで、閾値は、例えば、予め同一条件で撮影できる対象物を複数回撮影し、その比較値の値がカメラの色再現性であることから、比較値の最大の値として定められる。また、閾値は現場の環境によって変更できるように随時、手動で変更できるようにする。そして順次2コマ目、3コマ目というように全ての分割領域の輝度値の偏差を演算する(#235,#236)。図10Cにおいては、第1領域では、撮影画像PA2の微細領域90bの輝度差が閾値以内のため、正常を示している。また、第2領域では、撮影画像PA1の微細領域91aの輝度値の差が閾値より大きかったため、異常と判断し、削除されている状態を示している。そして、各画像から任意の微細領域のコマを合成して、1枚の画像230を作成する(#237)。ここで、合成の対象となる微細領域は、例えば、全ての撮影画像において、対応する微細領域のうち最も輝度値が高いものを選択するようにしてもよい。このようにして各微細領域が1枚に合成された画像237は、カメラAに対する測定画像として記憶部34に記憶される(#238)。
【0077】
なお、全てのカメラ21,22において同様の手順で各微細領域が合成された画像を作成し、写真計測用の測定画像とすることで大気の揺らぎの影響を除外することが可能となる。
【0078】
(測定対象の形状算出)
1組の測定画像が得られたら続いて測定対象の取鍋の形状計測を行う(#24)。形状測定は図11に示す手順により行われる。これらの一連の処理は、制御演算部33の対応点演算部33c及び形状測定部33dが処理を司る。
【0079】
写真測量においては、三次元の形状算出を行うには、1つの測定画像から対象となる取鍋部分に対して複数の特徴点を抽出する(#241)。さらに他の測定画像に対して、先に抽出された特徴点と同一場所となる点(以下、2枚の測定画像においてそれぞれ抽出されたこれらの特徴点及び同一場所を示す点を総括して対応点と呼ぶ場合がある)を抽出する(#242)。複数の測定画像に対応付けられた対応点を用いて、三角測量の原理により、三次元座標を得ることができる。
【0080】
(特徴点の抽出)
上記処理において、問題となるのは、画像認識によって1枚の測定画像から特徴点を選ぶ処理と測定画像間での対応点の取得する場合の処理手法である。もちろん、測定画像から取鍋部分の領域のみを手動で抽出し、その領域を保存しておき、次回以降の撮影ではその領域を入力することにより、取鍋部分の特徴領域を抽出するようにしてもよい。しかし、本実施形態においては、対応点演算部33c以下の処理により、これらの処理を自動的に行う。
【0081】
まず1の測定画像から特徴点を抽出する処理(#241)においては、測定対象が取鍋であるという特質を活かして以下のように処理を行う。図12Aは、1のカメラに対応する測定画像の画像表示例を示す図である。図12Aに示すように、測定画像230において、取鍋部分6は通常高熱により赤く発光して撮像されている。対応点演算部33cは、この発光領域を抽出する。すなわち、取鍋6の周縁に対応する部分61と取鍋の内壁に対応する部分62は、取鍋の周りに位置する背景部分80よりも赤く発光している。したがって、特徴領域の抽出としては、撮影された測定画像230に対して予め閾値が決められた明度以上の領域を抽出する。この際、他の発光部分も抽出する可能性があるので抽出された領域が一定以上の大きさの領域を取鍋部分の特徴領域とする。
【0082】
上述の画像認識によって抽出された領域は、発光していない取鍋部分を抽出できない可能性があるため、発光している領域より少し大きめの領域を取鍋の特徴領域としてもよい。このようにして得られた特徴領域内において、任意の複数の点を特徴点121として抽出する。
【0083】
(対応点の抽出)
続いて対応点演算部33cは、1の測定画像において抽出された特徴点121が示す測定対象の同一箇所を、他の測定画像上において対応付ける(#242)。カメラの撮影位置が前述によって既知であり、さらに一枚の測定画像230において特徴点121が得られたので、抽出された特徴点121に対応するエピポーラ線122を他の画像240上に引くことができる。図12Bは他のカメラ22における撮影画像240の例を示す。図12Aの特徴点121に対応して、公知の方法により図12Bにエピポーラ線122を示すことができる。このエピポーラ線122上のいずれかの点に特徴点121と同一場所である点が存在することがいえるため、特徴点121を中心とする小領域の画像とエピポーラ線122上より抽出された小領域の画像の正規化相関をとることにより、対応点を抽出することができる。
【0084】
(誤対応点の削除)
しかし、前記の方法で対応付けられた点は、測定対象の同じ場所に対応付けられるとは限らない場合がある。誤って対応付けられた点を誤対応点と呼ぶが、この誤対応点を削除する必要がある。従来は、この誤対応点の削除は複数の画像を同時に表示し、対応点の位置を目視において確認しながら削除していた。しかしこの方法では時間と労力の両方がかかることになる。そこで、誤対応点の削除を以下に示す処理により自動的に処理する(#243)。
【0085】
(誤対応点の削除処理例1)
まず、取鍋6のように幾何学形状で表せるような対象物であれば、予め、その対象物の特徴となるプロフィールを設定することができる。ここでいうプロフィールとは、図13Aに示すように、取鍋6の正面図を例にとると、開口側の楕円形状を示す短径141、長径142、その中心座標145と底面の短径143、長径144、その中心座標145に関する情報である。また、図13Bに示す取鍋6の側面図を例にとると開口側と底面との長さ151及び開口の深さ151aを示す情報である。これらの値は取鍋の製造時に設計データとして取得することができる。これにより、取鍋の製造時(設計時)の三次元形状を表すことができる。
【0086】
なお、測定領域102において取鍋6を測定毎に完全に同じ配置にすることは実質的には困難であり、測定ごとに若干ずれる可能性がある。このため、測定毎にその位置補正を行う必要がある。すなわち、対応点の抽出を行う他のカメラに対する測定画像240に撮像されている取鍋の像と設計データのプロフィールが最も重なるように位置補正させて重ね合わせる。
【0087】
この設計データが配置された三次元形状とエピポーラ線により抽出された測定画像240上に抽出された対応点から計算される三次元座標との距離において一定の閾値から離れた三次元点は誤対応点であると判断する。図14は誤対応点の抽出の処理を説明するための図である。図14には、三次元形状である取鍋6のプロフィール181に対してその近傍領域である外側領域182及び内側領域183が示されている。この近傍領域である外側領域182及び内側領域183の中にある計測点184は正常な三次元点であり、これらの近傍領域182の外側にある三次元点185,183の内側にある三次元点186は誤対応点であると判断する。このように簡単な三次元形状であるプロフィール形状とその位置補正機能を有することで、誤対応点を自動的に削除することができ、時間と労力を削減できる。
【0088】
また、取鍋の経年変化を調べる目的であれば、測定画像に配置されるプロフィールとしては、毎回取鍋の形状を測定する必要がある。この時、一つ以上前に計測された三次元形状のデータをプロフィールとして誤対応点の削除処理に用いることができる。この場合のプロフィールとしては、取鍋の三次元形状そのものである。新たな計測時には何らかの経年変化が生じているため、プロフィールと対応点の三次元座標との距離において一定の閾値以上離れた三次元点は誤対応点であるとみなすことができる。
【0089】
(誤対応点の削除処理例2)
次に、誤対応点を削除する処理の別実施形態について説明する。図15は1のカメラ21によって撮影された測定画像の表示例である。この測定画像を上述のように特徴領域を特定し、当該特徴領域上に特徴点を格子状に抽出する。図15の特徴点301〜305は、格子状に抽出された特徴点の1行分を示している。この特徴点に対して上述したエピポーラ線122を用いた方法により、他の測定画像上で対応点を計算する。
【0090】
この変形例においては、他の測定画像上に対応付けられた対応点の画像座標に基づいて、誤対応点を抽出する。すなわちこの変形例では、対応点演算部33cは、このように1の測定画像上において格子状にとられた特徴点を他の測定画像上で対応付けた場合、連続する特徴点の変化に比べて急激に変化する対応点を、誤対応点であると判断する。
【0091】
図15において、1の測定画像230上に格子状に配置された特徴点に対して他のカメラで撮影された他の測定画像上に対応付けられた対応点の例を図16Aに示す。また、図16Bは、図16Aの対応点のみを抽出した図である。図16Aにおいては、図15に示す特徴点301〜305に対する他の測定画像上の対応点321〜325を示している。ここで対応付けられた対応点321〜325は、取鍋6のように内面形状が滑らかに変化する対象物である場合、滑らかに変化するはずである。しかし、図16A、図16Bの対応点324においては、周囲の対応点の画像座標の変化に比べて急激な変化がある。対応点演算部33cは、このような画像座標は誤対応点の結果として抽出されたものであると判断する。このように格子状にとられた特徴点を対応付け、前後の対応点の変化に比べて急激に変化する対応点は誤対応点であると判断することができる。
【0092】
誤対応点を判断する場合の具体的演算手法としては、隣り合う対応点324、323が結ぶ線分330と反対側に隣り合う対応点324、325が結ぶ線分331がなす角度αがある閾値以下の変化があった場合は、誤った対応点と判断する。この閾値は、測定対象の形状によって決まるものである。このため、事前の実験により、最適な閾値を手動で設定しておくことが望ましい。
また同様に特徴点が等間隔に並んでいることを考慮すると前後の対応点座標もほぼ等間隔に並んでいると考えられるので、隣り合う対応点324、323が結ぶ線分330の長さと反対側に隣り合う対応点324、325が結ぶ線分331の長さの和がある閾値を超えた場合、誤った対応点であると判断する。この閾値は、測定対象の形状によって決まるものである。このため、事前の実験により、最適な閾値を手動で設定しておくことが望ましい。
さらに前述の角度αの閾値以下の値または距離が閾値以上の値をとった場合も誤った対応点としてもよい。
【0093】
(三次元形状の演算)
前記の方法により、複数の画像に対して、取鍋領域の対応点が自動的に抽出されると三角測量の原理により三次元座標を抽出することができる。形状測定部33dは、取鍋の三次元形状を自動的に演算する(#24)。
【0094】
(誤三次元座標の削除)
演算された三次元座標は、誤りの三次元座標を抽出する作業を行い、これを削除する処理を行う(#245)。図17は上記処理により計算された測定対象の三次元座標の一部を示している。取鍋6のように内面形状が滑らかに変化する対象物である場合、三次元座標311〜315は滑らかに変化するはずである。しかし、図17の三次元座標313においては、急激な変化がある。このような三次元座標は、先に行われた誤対応点の削除の処理(#243)において削除されずに残存した誤対応点の結果として計算されたものである。
【0095】
本実施形態においては、変化量としては、隣り合う測定対象の三次元座標313、312が結ぶ線分340と他方向に隣り合う測定対象の三次元座標313、314が結ぶ線分341がなす角度βがある閾値以下の変化があった場合は、当該角度βをなす三次元座標313を誤三次元座標として判断する。この閾値は、測定対象の形状によって決まるものである。このため、事前の実験により、最適な閾値を手動で設定しておくことが望ましい。
【0096】
さらに、誤対応点の第2の削除処理例において説明したように、特徴点を格子状に抽出した処理を行っている場合は、等間隔に並んでいることを考慮すると隣り合う三次元座標もほぼ等間隔に並んでいると考えられるので、隣り合う三次元座標313、312が結ぶ線分340の長さと他方向に隣り合う三次元座標313、314が結ぶ線分341の長さの和がある閾値を超えた場合、誤った三次元座標であると判断する。この閾値は、測定対象の形状によって決まるものである。このため、事前の実験により、最適な閾値を手動で設定しておくことが望ましい。なお、前述の角度βの閾値以下の値または距離が閾値以上の値をとった場合も誤った対応点としてもよい。
【0097】
誤った三次元座標を削除したのち、演算された三次元座標を用いて、取鍋の三次元形状を特定する(#246)。測定対象である取鍋の三次元形状が特定されると、残厚計算を行う(#25)。残厚計算は、制御演算部33の位置補正部33e及び変形量算出部33fが処理を司る。
【0098】
なお、残厚計算において、取鍋の残厚の位置を特定するために、三次元形状データを設計データと一致させて配置させて比較することが望ましい。このため、測定毎にえられた三次元形状データの位置補正を行う必要がある。位置補正のデータを図18に示す。図18は取鍋の平面図、正面図、側面図を示すものであり、位置補正としてX軸補正値161、Y軸補正値162、Z軸補正値163を実測する。また、角度補正として、X軸周りの角度補正値164、Y軸周りの角度補正値165、Z軸周りの角度補正値166を実測する。このように実測された位置補正値及び角度補正値を使って取鍋の三次元形状のデータを取鍋6の設計データに合わせて位置補正し、三次元位置を正確にきめることができる。
【0099】
設計データの位置補正においては、取鍋6の測定画像に撮像されている特徴部分を基準として行うことが好ましい。以下、位置補正の手順について説明する。ここでは、三次元形状データから設計データを重ねる方法を示すが、逆に設計データから三次元形状データに重ねても同様の結果が得られることを予め付記しておく。位置補正を行う前提として、配置された基準点が測量機器によって実測(#13)されているため、三次元形状データは、実測による座標系に合わせられている。
【0100】
まず、三次元形状データと設計データは同一の座標系にはないため、三次元形状データを設計データに重ねる。その手順を以下に示す。
【0101】
図20は基準点と取鍋の位置関係を含む設計データの一例である。すなわち、設計データには、取鍋の形状に関するデータのみではなく、本来取鍋が配置されるべき位置と基準点の位置との関係が含まれている。設計データ上にある直線上にない基準点を3つ選択する。選択された3つの座標点をそれぞれ、点P1(X1、Y1、Z1)点P2(X2、Y2、Z2)点P3(X3、Y3、Z3)とする。ここでは、基準点を選択したが、選択する三次元座標点は、互いに任意の直線上にない点であれば、どこでもかまわない。例えば、取鍋の軸受け部の両端と取鍋の口部でもかまわない。また、選択する点の数は3点以上でもよい。
【0102】
図21は基準点と取鍋の位置関係を含む三次元形状データの一例である。三次元形状データにある1.で選択された同一箇所の三次元座標点を3つ選択する。選択された3つの座標点をそれぞれ、点A(XA、YA、ZA)点B(XB、YB、ZB)点C(XC、YC、ZC)とする。
【0103】
三次元形状データを設計データに重ねるには上記のように選択されたお互いの3点の座標から以下の式(1)に示される方程式を解くことで求められる。
x=RX+T ---(1)
ここで、xは設計データの三次元座標ベクトル、Rは3×3の回転行列、Xは三次元形状データの三次元座標ベクトル、Tは平行移動量をあらわす併進ベクトルである。
【0104】
上記の式(1)で示される方程式は、金谷 健一著 「画像理解−三次元認識の数理」、森北出版に開示されているように、三次元形状データと設計データの選択された3点の三次元座標点から未知数である回転行列Rと併進ベクトルTを求めることができる。
【0105】
上記方程式を用いて未知数が得られたら、(1)式を用いて、三次元形状データを設計データの座標系に変換する。しかし、取鍋6は、設計図どおりの位置に配置することは難しく、このため、図22に見られるように三次元形状データの取鍋の位置(図21の点線)は、設計データからずれた位置に座標変換される。ずれた状態では、設計データからどの程度、ずれているかわからないため、変換された三次元形状データの取鍋の位置を設計データの位置に合わせるように補正する必要がある。補正方法は、図18に示すように実測された移動量であるX軸補正値161、Y軸補正値162、Z軸補正値163、および、角度補正である、X軸周りの角度補正値164、Y軸周りの角度補正値165、Z軸周りの角度補正値166を利用する。
【0106】
補正式としては、以下の式(2)で求められる。
x=MX+ΔT ---(2)
ここで、xは設計データの三次元座標ベクトル、Mは3×3の回転行列、Xは変換後の三次元形状データの三次元座標ベクトル、Tは平行移動量をあらわす併進ベクトルである。
【0107】
併進ベクトルTの三次元座標ベクトルは、X軸補正値161(Δx)、Y軸補正値162(Δy)、Z軸補正値163(Δy)を利用する。また、回転行列Mは、X軸周りの角度補正値164(ω)、Y軸周りの角度補正値165(φ)、Z軸周りの角度補正値166(κ)を利用する。具体的には、
T=(Δx、Δy、Δz)
【数1】
であらわされる。(2)式を用いることにより、三次元形状データを設計データに重ね合わせることができるようになる。
【0108】
前記の方法により、三次元形状データを設計図データに重ねることができたため、この情報を用いて座標変換された三次元形状データと設計図データを比較することにより、取鍋の経年変化を調べることができる。この手順は以下の通りである。
【0109】
まず、座標変換された三次元形状データは、点群データのため、面的な形状を持っていない。そこでまず、その点群データを利用し、三角網を貼ることを考える。三角網の貼り方としては非特許文献5に挙げられるDelauney法が適している。この方法に三次元の点群データの情報から三角網を貼ることができ、三次元形状データは面的な情報を得ることができる。
【0110】
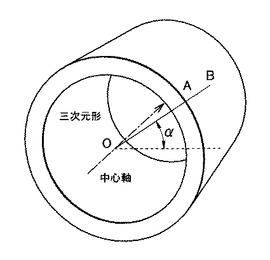
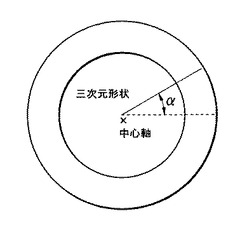
続いて、ある特定点の残厚を計算することを考える。図23は三次元形状データと設計図データを重ねた鳥瞰図を示している。図24はその正面図を示している。図23の一点鎖線は取鍋の中心軸を示している。また、点線は中心軸上のある一点0を通る水平軸方向を示している。この水平軸からある角度θの方向の直線と三次元形状データの三角網との交点をA点とする。また同様に、設計図データとの交点をBとする。距離OBと距離OAの差が残厚となる。
【0111】
同様に角度θを0から360度まで計算すると中心軸の点Oの周りの残厚を計算することができる。また点Oを取鍋の口部から底部まで、上記の計算をすると図19に見られる取鍋の側壁の残厚を計算することができる。
【0112】
図19(b)は、取鍋の側面図である。取鍋の底面部のある一点の距離ABを計測することにより、その点の残厚を計算することができる。また、上記計算を底面全域に対して行うと、図19(a)に見られるように底面の残厚を計算することができる。
【0113】
以上説明したように、本実施形態にかかる写真測量システムによれば、測定対象である取鍋の特性により取鍋の残厚を簡単かつ正確に測定することができる。
【0114】
また、本発明の従来のレーザー式形状計や写真測量装置に比べての導入効果としては、低コスト、高精度、高速である。
【0115】
すなわち、レーザー式形状計は、高出力半導体レーザーヘッドとレーザーヘッド高速駆動装置を備えた、高価な装置である。本発明装置は、汎用のデジタルカメラと例えばパソコン、基準点を主な構成品とするため、極めて安価に仕上がる。
【0116】
また、従来のレーザー式形状計は、高温の液体状スラグコーティング面又は溶融金属面に対しては、レーザー光が散乱するため測定不可能であった。本発明装置は複数の時経列写真データより、自動的に高温揺らぎ成分を除去することが可能となり、従来レーザー測量が不可能であった1200℃以上のスラグコーティング面は勿論のこと、1800℃を超える溶融金属面の表面測量が可能となった。
【0117】
従来のレーザー式形状計は、1点あたり0.3秒程度かかり、炉を対象とした場合温度降下を避けるため、最大測定時間は数分以内となるため測定点数が数百点以内となり、全体を詳細に測量することが困難である。本発明装置は前述の時経列写真データをサンプリングするための総合時間でも10秒以内と極めて短時間で済むため、炉熱降下が最小限に抑えられるため、耐火物の亀裂を発生させず、更に省エネ効果が生まれる。
【0118】
次に、従来の写真測量装置に比べての導入効果は次の通りである。従来の写真測量装置は、コスト的にはレーザー式形状計よりも安価であるが、耐火物の残厚計測に適用する場合、撮影制御部、測定画像作成部、基準点抽出部、対応点抽出部、形状測定部、位置補正部が手動操作のため、数時間のデータ処理を必要としたため、ラボ用途に限られていた。前述の撮影制御部、測定画像作成部、基準点抽出部、対応点抽出部、形状測定部、位置補正部が手動操作のため、耐火物の残厚計測に数時間を要していた。本発明装置は撮影制御部、測定画像作成部、基準点抽出部、対応点抽出部、形状測定部、位置補正部が自動的に処理可能であるため、汎用パソコンを使ってのデータ処理においても10分以内の高速化処理を達成している。その結果、オンラインでの適用が可能となり、耐火物残厚予測精度が向上し、耐火物補修時期の最適化が図れることにより、耐火物コストミニマム化の効果を得ている。
【0119】
また、従来の写真測量装置は、1度の写真撮影より測量処理を実施するために、高温の液体状スラグコーティング面又は溶融金属面の揺らぎ部分において大きな誤差が生じており、測定不可能であった。本発明装置は複数の時経列写真データより、自動的に高温揺らぎ成分を除去することが可能となり、従来の写真測量装置が不可能であった1200℃以上のスラグコーティング面は勿論のこと、1800℃を超える溶融金属面の表面測量が可能となった。その結果、従来では耐火物残厚の管理が困難であったAOD炉等の高温炉が可能となったため、耐火物コストミニマム化の効果を得ている。
【0120】
なお、本発明は上記実施形態に限定されるものではなく、鉄鋼業以外でのその他種々の態様で実施可能である。
【図面の簡単な説明】
【0121】
【図1A】本発明の写真測量装置の一実施形態にかかる写真測量システムの全体構成を示す模式図である。
【図1B】本発明の写真測量装置の一実施形態にかかる写真測量システムの全体構成を示す模式図である。
【図2】図1Aの写真測量システムに用いられるカメラ固定ユニットの構成を示す図である。
【図3】図1Aの写真測量システムに用いられる基準点ユニットの配置箇所及び構成を示す図である。
【図4A】図1Aの写真測量システムに用いられるレトロターゲットの構成例を示す図である。
【図4B】図1Aの写真測量システムに用いられるレトロターゲットの他の構成例を示す図である。
【図4C】図1Aの写真測量システムに用いられるレトロターゲットのさらなる他の構成例を示す図である。
【図5】図1Aの写真測量システムに用いられる制御ユニットの構成を示すブロック図である。
【図6】図1Aの写真測量システムを用いて測量する準備作業の手順について示すフローである。
【図7】図1Aの写真測量システムにおける光学関係を示す図である。
【図8】基準点の検出処理を行う場合の説明図である。
【図9】2台のカメラが取鍋を撮影するタイミングの説明図である。
【図10A】図1Aの写真測量システムにおいて三次元形状を測定する処理工程を示すフロー図である。
【図10B】画像作成部が測量画像を作成する処理についての処理フロー図である。
【図10C】図10Bに示す処理の説明図である。
【図11】図10Aの測定対象の形状算出の処理における詳細フロー図である。
【図12A】1のカメラに対応する測定画像の画像表示例を示す図である。
【図12B】他のカメラに対応する測定画像の画像表示例を示す図である。
【図13A】取鍋のプロフィールを示す設計データの例を示す正面図である。
【図13B】取鍋のプロフィールを示す設計データの例を示す側面図である。
【図14】誤対応点の抽出の処理を説明する図である。
【図15】1のカメラによって撮影された測定画像の表示例である。
【図16A】1の測定画像上に格子状に配置された特徴点に対して他のカメラで撮影された他の測定画像上に対応付けられた対応点の例を示す図である。
【図16B】図16Aの対応点のみを抽出した図である。
【図17】計算された測定対象の一部の三次元座標の位置を示す図である。
【図18】取鍋の平面図、正面図、側面図を示す図である。
【図19】算出された三次元座標を用いた残厚の展開図である。
【図20】基準点と取鍋の位置関係を含む設計データの一例である。
【図21】基準点と取鍋の位置関係を含む三次元形状データの一例である。
【図22】三次元形状データの取鍋の位置を示す図である。
【図23】三次元形状データと設計図データを重ねた鳥瞰図を示す図である。
【図24】図23の正面図を示す図である。
【符号の説明】
【0122】
1 写真測量システム
2,21,22 カメラ
3 制御ユニット
4 カメラ固定ユニット
5 基準点ユニット
6 取鍋
7 軸受台
31 レリース部
32 インターフェース部
33 制御演算部
33a 基準点指定部
33b 画像作成部
33c 対応点演算部
33d 形状測定部
34 記憶部
35 システムプログラム記憶部
40,40a,40b,40c レトロターゲット
41 基準点
210、220 撮影画像
230,240 測定画像
【特許請求の範囲】
【請求項1】
撮影装置によって異なる複数の位置から撮影した画像を用いて測量対象の三次元形状を測量する写真測量装置であって、
測定対象周辺に配置した複数の基準点を含む空間を撮影する複数の前記撮影装置の撮影動作を制御する撮影制御部と、
前記撮影制御部の動作により前記複数の撮影装置で撮影された撮影画像を用いて、それぞれの撮影装置に対応する測定画像を作成する測定画像作成部と、
前記測定画像からそれぞれの撮影装置に対応する測定画像に共通する基準点の対応点座標を抽出する基準点抽出部と、
前記測定画像からそれぞれの撮影装置に対応する測定画像に共通する測定対象について特定された特徴点の特徴点座標と当該特徴点について他の測定画像上で対応づけられた対応点の対応点座標を抽出する対応点抽出部と、
前記特徴点座標と対応点座標から前記対応点の三次元的な位置情報を求め、前記対応点の位置情報に基づいて、前記測定対象の三次元形状を求める形状測定部と、
前記形状測定部によって求められた対応点の三次元位置と前記測定対象の設計データによって決定されている前記測定対象の基準位置との誤差補正を行い、前記測定対象の三次元位置を補正する位置補正部とを備えることを特徴とする、写真測量装置。
【請求項2】
撮影装置によって異なる複数の位置から撮影した画像を用いて測量対象の三次元形状を測量し、記憶部に記憶されている前記測量対象の設計データと前記測量対象の三次元形状とを比較して、測量対象と前記設計データとの形状の差を演算する写真測量装置であって、
測定対象周辺に配置した複数の基準点を含む空間を撮影する複数の前記撮影装置の撮影動作を制御する撮影制御部と、
前記撮影制御部の動作により前記複数の撮影装置で撮影された撮影画像を用いて、それぞれの撮影装置に対応する測定画像を作成する測定画像作成部と、
前記測定画像からそれぞれの撮影装置に対応する測定画像に共通する基準点の対応点座標を抽出する基準点抽出部と、
前記測定画像からそれぞれの撮影装置に対応する測定画像に共通する測定対象の共通の対応点座標を抽出する対応点抽出部と、
前記対応点座標から前記対応点の三次元的な位置情報を求め、前記対応点の位置情報に基づいて、前記測定対象の三次元形状を求める形状測定部と、
前記形状測定部によって求められた基準点の三次元位置と前記設計データによって決定されている前記測定対象の基準位置との誤差補正を行い、前記測定対象の三次元位置を補正する位置補正部と、
前記位置補正部により補正された三次元形状と前記設計データを比較することによって、前記測定対象の変形箇所の位置と変形量とを算出する変形量算出部とを備えることを特徴とする、写真測量装置。
【請求項3】
前記撮影制御部は、前記複数の撮影装置を1つのトリガ信号によって同時に撮影制御することを特徴とする、請求項1又は2記載の写真測量装置。
【請求項4】
前記撮影制御部は、前記トリガ信号を間欠的に複数回発生させ、前記複数の撮影装置によって同時に連続的に撮影が行われるように撮影制御することを特徴とする、請求項3に記載の写真測量装置。
【請求項5】
前記測定画像作成部は、任意の複数の写真画像を抽出する手段が全ての撮影装置において撮影時刻が同じ1組の撮影画像を選択し、当該撮影画像を測定画像とするように構成されていることを特徴とする、請求項1から4のいずれか1つに記載の写真測量装置。
【請求項6】
前記測定画像作成部は、個々の撮影装置において前記連続的に撮影された複数の撮影画像について、前記複数の撮影画像を微細領域に分割して撮影画像上の任意の輝度が同一の部分に相当する微細領域の輝度の差分処理を行う差分処理部と、
前記差分処理部により差分処理された部分の輝度差が閾値以内のもののみを用いて、新たな写真画像に編集する画像編集部を備え、
前記それぞれの撮影装置ごとに前記画像編集部によって編集された写真画像を測定画像とすることを特徴とする、請求項5に記載の写真測量装置。
【請求項7】
前記基準点抽出部は、先の測量時に用いられた測定画像において抽出された基準点座標である事前基準点座標の近傍の範囲を走査し、前記測定画像から基準点座標を抽出することを特徴とする、請求項1から6のいずれか1つに記載の写真測量装置。
【請求項8】
前記対応点抽出部は、先の測量時に用いられた測定画像において抽出された対応点座標である前記事前対応点座標の近傍の範囲を走査し、前記測定画像から対応点座標を抽出することを特徴とする、請求項1から6のいずれか1つに記載の写真測量装置。
【請求項9】
前記形状測定部によって得られた三次元座標を前記設計データと比較し、前記設計データにより特定される三次元形状から所定距離以上離れた点として求められた三次元座標を除いて、前記測定対象の三次元形状を特定することを特徴とする、請求項2から8のいずれか1つに記載の写真測量装置。
【請求項10】
対応点抽出部は、複数の測定画像について、測定対象の同じ場所を画像相関により対応付ける対応点設定部と、
前記対応点設定部により対応づけられた点の真偽を判定する誤対応点抽出部とを備え、 前記誤対応点抽出部は、1つの測定対象について特定された特徴点について対応づけられた対応点から得られる三次元座標と、予め用意された測定対象の三次元形状のデータを比較し、前記対応点から得られる三次元座標が、測定対象の三次元形状の近傍にない対応点を誤りであると判定することを特徴とする、請求項1から9のいずれか1つに記載の写真測量装置。
【請求項11】
測定対象の前記三次元形状のデータは、前記測定対象の設計データであることを特徴とする、請求項10に記載の写真測量装置。
【請求項12】
測定対象の前記三次元幾何形状のデータは、前記測定対象について、先の測量時に測量された三次元計測データであることを特徴とする、請求項10に記載の写真測量装置。
【請求項13】
対応点抽出部は、複数の測定画像について、測定対象の同じ場所を画像相関により対応付ける対応点設定部と、
前記対応点設定部により対応づけられた点の真偽を判定する誤対応点抽出部とを備え、
前記対応点設定部は、任意の1の測定画像に設定する特徴点を任意に特定された配置となるように設定し、前記設定された特徴点に対応するように他の測定画像上に対応点を設定し、
前記誤対応点抽出部は、対象となる前記対応点の周囲に配置された対応点の配置が、前記特徴点において特定された配置と比較して閾値を越える変化を有するときは、当該対象となる対応点が誤対応点であると判断することを特徴とする、請求項1から9のいずれか1つに記載の写真測量装置。
【請求項14】
前記対応点設定部は、前記任意の1の測定画像に設定する特徴点を格子状配置となるように設定することを特徴とする、請求項13に記載の写真測量装置。
【請求項15】
前記誤対応点抽出部は、前記対象となる対応点に隣接する1つの対応点を結ぶ直線と、前記対象となる前記隣接する対応点の反対側に隣接する対応点とを結ぶ直線とがなす角度が、閾値を越える場合に、前記対象となる対応点が誤対応点であると判断する、請求項13又は14に記載の写真測量装置。
【請求項16】
前記誤対応点抽出部は、前記対象となる対応点に隣接する対応点を結ぶ直線Aと、前記対象となる前記隣接する対応点の反対側に隣接する対応点とを結ぶ直線Bとの長さの和が、閾値を越える場合に、前記対象となる対応点が誤対応点であると判断する、請求項13又は14に記載の写真測量装置。
【請求項17】
請求項1から16のいずれか1つに記載の写真測量装置と、前記測定対象の近傍に配置され前記基準点として機能するターゲットを複数固定する基準点ユニットと、前記複数の撮影装置を前記基準点ユニットと前記測定対象が撮影できるような位置に固定可能に構成されたカメラ固定ユニットとを備えた写真測量システムであって、
前記基準点ユニットは、前記ターゲットを前記撮影装置により撮影される測定対象のX、Y、Z軸の各成分別に、測定対象の最大距離の半分以上の距離を置いて配置されることを特徴とする、写真測量システム。
【請求項18】
請求項1から16のいずれか1つに記載の写真測量装置と、前記測定対象の近傍に配置され前記基準点として機能するターゲットを複数固定する基準点ユニットと、前記複数の撮影装置を前記基準点ユニットと前記測定対象が撮影できるような位置に固定可能に構成されたカメラ固定ユニットとを備えた写真測量システムであって、
前記ターゲットは、発光部を備え、前記写真測量装置は前記発光部からの光を前記基準点して前記撮影装置により撮影することを特徴とする、写真測量システム。
【請求項1】
撮影装置によって異なる複数の位置から撮影した画像を用いて測量対象の三次元形状を測量する写真測量装置であって、
測定対象周辺に配置した複数の基準点を含む空間を撮影する複数の前記撮影装置の撮影動作を制御する撮影制御部と、
前記撮影制御部の動作により前記複数の撮影装置で撮影された撮影画像を用いて、それぞれの撮影装置に対応する測定画像を作成する測定画像作成部と、
前記測定画像からそれぞれの撮影装置に対応する測定画像に共通する基準点の対応点座標を抽出する基準点抽出部と、
前記測定画像からそれぞれの撮影装置に対応する測定画像に共通する測定対象について特定された特徴点の特徴点座標と当該特徴点について他の測定画像上で対応づけられた対応点の対応点座標を抽出する対応点抽出部と、
前記特徴点座標と対応点座標から前記対応点の三次元的な位置情報を求め、前記対応点の位置情報に基づいて、前記測定対象の三次元形状を求める形状測定部と、
前記形状測定部によって求められた対応点の三次元位置と前記測定対象の設計データによって決定されている前記測定対象の基準位置との誤差補正を行い、前記測定対象の三次元位置を補正する位置補正部とを備えることを特徴とする、写真測量装置。
【請求項2】
撮影装置によって異なる複数の位置から撮影した画像を用いて測量対象の三次元形状を測量し、記憶部に記憶されている前記測量対象の設計データと前記測量対象の三次元形状とを比較して、測量対象と前記設計データとの形状の差を演算する写真測量装置であって、
測定対象周辺に配置した複数の基準点を含む空間を撮影する複数の前記撮影装置の撮影動作を制御する撮影制御部と、
前記撮影制御部の動作により前記複数の撮影装置で撮影された撮影画像を用いて、それぞれの撮影装置に対応する測定画像を作成する測定画像作成部と、
前記測定画像からそれぞれの撮影装置に対応する測定画像に共通する基準点の対応点座標を抽出する基準点抽出部と、
前記測定画像からそれぞれの撮影装置に対応する測定画像に共通する測定対象の共通の対応点座標を抽出する対応点抽出部と、
前記対応点座標から前記対応点の三次元的な位置情報を求め、前記対応点の位置情報に基づいて、前記測定対象の三次元形状を求める形状測定部と、
前記形状測定部によって求められた基準点の三次元位置と前記設計データによって決定されている前記測定対象の基準位置との誤差補正を行い、前記測定対象の三次元位置を補正する位置補正部と、
前記位置補正部により補正された三次元形状と前記設計データを比較することによって、前記測定対象の変形箇所の位置と変形量とを算出する変形量算出部とを備えることを特徴とする、写真測量装置。
【請求項3】
前記撮影制御部は、前記複数の撮影装置を1つのトリガ信号によって同時に撮影制御することを特徴とする、請求項1又は2記載の写真測量装置。
【請求項4】
前記撮影制御部は、前記トリガ信号を間欠的に複数回発生させ、前記複数の撮影装置によって同時に連続的に撮影が行われるように撮影制御することを特徴とする、請求項3に記載の写真測量装置。
【請求項5】
前記測定画像作成部は、任意の複数の写真画像を抽出する手段が全ての撮影装置において撮影時刻が同じ1組の撮影画像を選択し、当該撮影画像を測定画像とするように構成されていることを特徴とする、請求項1から4のいずれか1つに記載の写真測量装置。
【請求項6】
前記測定画像作成部は、個々の撮影装置において前記連続的に撮影された複数の撮影画像について、前記複数の撮影画像を微細領域に分割して撮影画像上の任意の輝度が同一の部分に相当する微細領域の輝度の差分処理を行う差分処理部と、
前記差分処理部により差分処理された部分の輝度差が閾値以内のもののみを用いて、新たな写真画像に編集する画像編集部を備え、
前記それぞれの撮影装置ごとに前記画像編集部によって編集された写真画像を測定画像とすることを特徴とする、請求項5に記載の写真測量装置。
【請求項7】
前記基準点抽出部は、先の測量時に用いられた測定画像において抽出された基準点座標である事前基準点座標の近傍の範囲を走査し、前記測定画像から基準点座標を抽出することを特徴とする、請求項1から6のいずれか1つに記載の写真測量装置。
【請求項8】
前記対応点抽出部は、先の測量時に用いられた測定画像において抽出された対応点座標である前記事前対応点座標の近傍の範囲を走査し、前記測定画像から対応点座標を抽出することを特徴とする、請求項1から6のいずれか1つに記載の写真測量装置。
【請求項9】
前記形状測定部によって得られた三次元座標を前記設計データと比較し、前記設計データにより特定される三次元形状から所定距離以上離れた点として求められた三次元座標を除いて、前記測定対象の三次元形状を特定することを特徴とする、請求項2から8のいずれか1つに記載の写真測量装置。
【請求項10】
対応点抽出部は、複数の測定画像について、測定対象の同じ場所を画像相関により対応付ける対応点設定部と、
前記対応点設定部により対応づけられた点の真偽を判定する誤対応点抽出部とを備え、 前記誤対応点抽出部は、1つの測定対象について特定された特徴点について対応づけられた対応点から得られる三次元座標と、予め用意された測定対象の三次元形状のデータを比較し、前記対応点から得られる三次元座標が、測定対象の三次元形状の近傍にない対応点を誤りであると判定することを特徴とする、請求項1から9のいずれか1つに記載の写真測量装置。
【請求項11】
測定対象の前記三次元形状のデータは、前記測定対象の設計データであることを特徴とする、請求項10に記載の写真測量装置。
【請求項12】
測定対象の前記三次元幾何形状のデータは、前記測定対象について、先の測量時に測量された三次元計測データであることを特徴とする、請求項10に記載の写真測量装置。
【請求項13】
対応点抽出部は、複数の測定画像について、測定対象の同じ場所を画像相関により対応付ける対応点設定部と、
前記対応点設定部により対応づけられた点の真偽を判定する誤対応点抽出部とを備え、
前記対応点設定部は、任意の1の測定画像に設定する特徴点を任意に特定された配置となるように設定し、前記設定された特徴点に対応するように他の測定画像上に対応点を設定し、
前記誤対応点抽出部は、対象となる前記対応点の周囲に配置された対応点の配置が、前記特徴点において特定された配置と比較して閾値を越える変化を有するときは、当該対象となる対応点が誤対応点であると判断することを特徴とする、請求項1から9のいずれか1つに記載の写真測量装置。
【請求項14】
前記対応点設定部は、前記任意の1の測定画像に設定する特徴点を格子状配置となるように設定することを特徴とする、請求項13に記載の写真測量装置。
【請求項15】
前記誤対応点抽出部は、前記対象となる対応点に隣接する1つの対応点を結ぶ直線と、前記対象となる前記隣接する対応点の反対側に隣接する対応点とを結ぶ直線とがなす角度が、閾値を越える場合に、前記対象となる対応点が誤対応点であると判断する、請求項13又は14に記載の写真測量装置。
【請求項16】
前記誤対応点抽出部は、前記対象となる対応点に隣接する対応点を結ぶ直線Aと、前記対象となる前記隣接する対応点の反対側に隣接する対応点とを結ぶ直線Bとの長さの和が、閾値を越える場合に、前記対象となる対応点が誤対応点であると判断する、請求項13又は14に記載の写真測量装置。
【請求項17】
請求項1から16のいずれか1つに記載の写真測量装置と、前記測定対象の近傍に配置され前記基準点として機能するターゲットを複数固定する基準点ユニットと、前記複数の撮影装置を前記基準点ユニットと前記測定対象が撮影できるような位置に固定可能に構成されたカメラ固定ユニットとを備えた写真測量システムであって、
前記基準点ユニットは、前記ターゲットを前記撮影装置により撮影される測定対象のX、Y、Z軸の各成分別に、測定対象の最大距離の半分以上の距離を置いて配置されることを特徴とする、写真測量システム。
【請求項18】
請求項1から16のいずれか1つに記載の写真測量装置と、前記測定対象の近傍に配置され前記基準点として機能するターゲットを複数固定する基準点ユニットと、前記複数の撮影装置を前記基準点ユニットと前記測定対象が撮影できるような位置に固定可能に構成されたカメラ固定ユニットとを備えた写真測量システムであって、
前記ターゲットは、発光部を備え、前記写真測量装置は前記発光部からの光を前記基準点して前記撮影装置により撮影することを特徴とする、写真測量システム。
【図1A】

【図1B】
【図2】
【図3】
【図4A】
【図4B】
【図4C】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10A】
【図10B】
【図10C】
【図11】
【図12A】
【図12B】
【図13A】
【図13B】
【図14】
【図15】
【図16A】
【図16B】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図1B】
【図2】
【図3】
【図4A】
【図4B】
【図4C】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10A】
【図10B】
【図10C】
【図11】
【図12A】
【図12B】
【図13A】
【図13B】
【図14】
【図15】
【図16A】
【図16B】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【公開番号】特開2007−212430(P2007−212430A)
【公開日】平成19年8月23日(2007.8.23)
【国際特許分類】
【公開請求】
【出願番号】特願2006−214824(P2006−214824)
【出願日】平成18年8月7日(2006.8.7)
【出願人】(000001096)倉敷紡績株式会社 (296)
【出願人】(000002118)住友金属工業株式会社 (2,544)
【Fターム(参考)】
【公開日】平成19年8月23日(2007.8.23)
【国際特許分類】
【出願番号】特願2006−214824(P2006−214824)
【出願日】平成18年8月7日(2006.8.7)
【出願人】(000001096)倉敷紡績株式会社 (296)
【出願人】(000002118)住友金属工業株式会社 (2,544)
【Fターム(参考)】
[ Back to top ]