
写真計測システムおよび写真計測用写真撮影条件決定方法

【課題】写真計測シミュレーションをおこない、精度良く写真計測できる写真計測ポイントと撮影条件を事前評価できる写真計測システムおよび写真計測用写真撮影条件決定方法を提供する。
【解決手段】3DCAD空間31上に作成した計測対象物モデル61に対して仮計測ポイント7を設定し、その周囲の形状を解析することにより、仮計測ポイント7周辺で精度良く写真計測を行うことができる論理計測ポイントを抽出するための論理計測ポイント抽出処理方法を選定し、この方法で仮想写真計測をして得た論理計測ポイントについて設計データと比較することにより所望の計測精度が得られているか否かを判定することにより、実際の写真計測に適した写真撮影位置・方向を取得できる写真計測システムおよび写真計測用写真撮影条件決定方法を得る。
【解決手段】3DCAD空間31上に作成した計測対象物モデル61に対して仮計測ポイント7を設定し、その周囲の形状を解析することにより、仮計測ポイント7周辺で精度良く写真計測を行うことができる論理計測ポイントを抽出するための論理計測ポイント抽出処理方法を選定し、この方法で仮想写真計測をして得た論理計測ポイントについて設計データと比較することにより所望の計測精度が得られているか否かを判定することにより、実際の写真計測に適した写真撮影位置・方向を取得できる写真計測システムおよび写真計測用写真撮影条件決定方法を得る。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、写真計測を実施する際、所望の計測精度を確実に得ることができる写真撮影条件を指示する写真計測システムおよび写真計測用写真撮影条件決定方法に関するものである。
【背景技術】
【0002】
大型配管や船体のブロック等の立体的な構造物を製作した後、これら構造物において特定の部分が設計図通りに作られているか否か、たとえば、孔を設けた場合に、その孔の位置が正しいかどうかを確認するために、実際に製作された構造物についての計測が必要になる場合がある。
大型配管や船体ブロックのような、直接的な寸法の測定が困難な構造物の計測に用いられる手法の一つとして、写真計測が用いられる。
【0003】
写真計測は、デジタルカメラで、計測すべき構造物を計測対象物として撮影し、撮像素子上にそれぞれ投影される計測対象物の像の寸法と、カメラの焦点距離と、カメラと計測対象物との距離を基にして、計測対象物の実際の寸法を算出するものであり、計測対象物が立体的な構造物の場合には、異なる角度から写した複数の写真を組み合わせて使用することで、3次元的な寸法を計測するものである。
【0004】
このような写真計測では、計測対象物の写真を撮影した写真撮影位置(カメラ位置とカメラの向き)、使用する写真の枚数によって計測精度が変動することが一般に知られている。又、写真計測では実際に計測対象物を撮影した実写真において、3次元座標を求めたい計測ポイントの写真上の座標(デジタル写真においては画素位置)を求める必要あるが、該計測ポイントの座標抽出精度によっても計測精度が大きく変動することが一般に知られている。
【0005】
したがって、写真計測の精度を確保するための写真撮影位置、すなわち、計測対象物を角度を変えて撮影するためのカメラ設置位置の決定、及び、該各カメラ設置位置におけるカメラの向きの決定も重要であるとともに、上記計測対象物上の計測ポイントの写真上における座標を精度良く抽出できる撮影方法・抽出処理方法が非常に重要である。
【0006】
例えば、特許文献1に示すように、誰でも容易に所望の計測精度が得られ写真撮影位置決定方法として、計測対象物の設計データを3DCAD上に取り込んで作成したモデルに対し、写真計測により三次元座標を求めたい計測ポイントを3DCAD上で設定し、次に、3DCAD上で設定された計測ポイントを撮影し得る少なくとも2個所の仮想写真撮影位置を3DCAD空間内にて設定し、該各仮想写真撮影位置にて撮影された仮想写真を基に写真計測を行った場合に得られる計測精度を予め算出し、算出された計測精度が実際の計測時に所望される計測精度以上となった場合に、上記各仮想写真撮影位置を実写真撮影位置として指示する撮影位置指示書を出力させることを特徴とする写真計測用写真撮影位置の決定方法が提案されている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2002−39753
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、特許文献1に示す写真撮影位置決定方法では、計測ポイントを3D画像上で任意に指定しているだけで、実写真座標からの計測ポイントの抽出精度についてはまったく考慮されていない。
このため、実際の写真計測において、計測ポイントの実写真上での撮影状態によっては、精度良く計測ポイントの写真座標を抽出できない。
したがって、写真計測シミュレーションで得られた計測精度が、実際の写真計測では得られない場合が多いという問題があった。
【0009】
本発明は、このような課題を解消するためになされたものであり、実写真から精度良く計測ポイントの写真座標を抽出することを可能とするために、その前段階である写真計測シミュレーションの精度を向上させることができる写真計測システムおよび写真計測用写真撮影条件決定方法を提供することを目的とする。
【課題を解決するための手段】
【0010】
この発明に係る写真計測システムは、
計測対象物のデジタル写真撮影を行い、その写真に計測ポイントを設定して解析することにより計測対象物の計測ポイントの3次元座標を解析する写真計測システムにおいて、
計測対象物の設計データを読み込み、仮想の3次元の計測対象物モデルを生成する3Dモデリング機能と、
計測対象物モデルに対して、仮想写真計測を所望する位置を仮に仮計測ポイントとして指定する仮計測ポイント指定機能と、
仮計測ポイントに対する仮想写真の撮影位置・方向を指定して仮想写真を撮影する仮想写真撮影機能と、
仮想写真の仮計測ポイントの周囲の形状を解析することにより、仮計測ポイント近傍の自動抽出可能な位置としての論理計測ポイントを、仮想写真から自動抽出する論理計測ポイント抽出処理方法を選定する論理計測ポイント抽出処理方法選定機能と、
異なる位置から撮影された複数の仮想写真から、論理計測ポイント抽出処理方法を用いて自動抽出された同一の論理計測ポイントの、それぞれの仮想写真上における仮想写真座標を取得する仮想写真座標取得機能と、
仮想写真座標取得機能で取得した複数の仮想写真座標と、それぞれの仮想写真の仮想撮影をした位置、方向から、論理計測ポイントの仮想3次元空間座標を算出する3次元空間座標算出機能と、
計測対象物の設計データから直接求めた論理計測ポイントとなるべきポイントの仮想3次元空間座標と、3次元空間座標算出機能により求めた論理計測ポイントの仮想3次元空間座標との誤差を算出する仮想計測誤差算出機能とを有する制御ソフトを備えたコンピュータを備えたものである。
【0011】
また、この発明に係る写真計測用写真撮影条件決定方法は、計測対象物のデジタル写真撮影を行うための写真撮影条件決定方法であって、
計測対象物の設計データを読み込み、仮想の3次元の計測対象物モデルを生成するステップと、
計測対象物モデルに対して、仮想写真計測を所望する位置を仮に仮計測ポイントとして指定するステップと、
実写真計測時に必要とする計測精度を設定するステップと、
仮計測ポイントに対する仮想写真の撮影位置・方向を指定して仮想写真を撮影するステップと、
仮計測ポイントの周囲の形状を解析することにより、仮想写真から自動抽出可能な位置としての論理計測ポイント抽出処理方法を選定して論理計測ポイントを取得するステップと、
異なる位置から撮影された複数の仮想写真から、自動抽出された同一の論理計測ポイントの、それぞれの仮想写真上における仮想写真座標を取得するステップと、
仮想写真座標取得機能で取得した複数の仮想写真座標と及びそれぞれの仮想写真の仮想撮影をした位置、方向から、論理計測ポイントの仮想3次元空間座標を算出するステップと、
計測対象物の設計データから直接求めた論理計測ポイントとなるべきポイントの仮想3次元空間座標と、仮想写真から求めた論理計測ポイントの仮想3次元空間座標との誤差を算出するステップとからなるものである。
【発明の効果】
【0012】
この発明に係る写真計測システムは、
計測対象物の設計データを読み込み、仮想の3次元の計測対象物モデルを生成する3Dモデリング機能と、
計測対象物モデルに対して、仮想写真計測を所望する位置を仮に仮計測ポイントとして指定する仮計測ポイント指定機能と、
仮計測ポイントに対する仮想写真の撮影位置・方向を指定して仮想写真を撮影する仮想写真撮影機能と、
仮想写真の仮計測ポイントの周囲の形状を解析することにより、仮計測ポイント近傍の自動抽出可能な位置としての論理計測ポイントを、仮想写真から自動抽出する論理計測ポイント抽出処理方法を選定する論理計測ポイント抽出処理方法選定機能と、
異なる位置から撮影された複数の仮想写真から、論理計測ポイント抽出処理方法を用いて自動抽出された同一の論理計測ポイントの、それぞれの仮想写真上における仮想写真座標を取得する仮想写真座標取得機能と、
仮想写真座標取得機能で取得した複数の仮想写真座標と、それぞれの仮想写真の仮想撮影をした位置、方向から、論理計測ポイントの仮想3次元空間座標を算出する3次元空間座標算出機能と、
計測対象物の設計データから直接求めた論理計測ポイントとなるべきポイントの仮想3次元空間座標と、3次元空間座標算出機能により求めた論理計測ポイントの仮想3次元空間座標との誤差を算出する仮想計測誤差算出機能とを有する制御ソフトを備えたコンピュータを備えたものなので、構造物の中で一定の範囲を占める部分から、写真計測用に適したピンポイントをシミュレーションにより抽出し、実際の写真計測時に所定の精度を期待できる位置を事前に確認することができる。
これにより、作業の無駄を省き効率よく写真計測を実施できる。
【0013】
また、この発明に係る写真計測用写真撮影条件決定方法は、計測対象物のデジタル写真撮影を行うための写真撮影条件決定方法であって、
計測対象物の設計データを読み込み、仮想の3次元の計測対象物モデルを生成するステップと、
計測対象物モデルに対して、仮想写真計測を所望する位置を仮に仮計測ポイントとして指定するステップと、
実写真計測時に必要とする計測精度を設定するステップと、
仮計測ポイントに対する仮想写真の撮影位置・方向を指定して仮想写真を撮影するステップと、
仮計測ポイントの周囲の形状を解析することにより、仮想写真から自動抽出可能な位置としての論理計測ポイント抽出処理方法を選定して論理計測ポイントを取得するステップと、
異なる位置から撮影された複数の仮想写真から、自動抽出された同一の論理計測ポイントの、それぞれの仮想写真上における仮想写真座標を取得するステップと、
仮想写真座標取得機能で取得した複数の仮想写真座標と及びそれぞれの仮想写真の仮想撮影をした位置、方向から、論理計測ポイントの仮想3次元空間座標を算出するステップと、
計測対象物の設計データから直接求めた論理計測ポイントとなるべきポイントの仮想3次元空間座標と、仮想写真から求めた論理計測ポイントの仮想3次元空間座標との誤差を算出するステップとからなるものなので、構造物の中で一定の範囲を占める部分から、写真計測用に適したピンポイントをシミュレーションにより抽出し、実際の写真計測時に所定の精度を期待できる位置を事前に確認することができる。
これにより、作業の無駄を省き効率よく写真計測を実施できる。
【図面の簡単な説明】
【0014】
【図1】本発明の実施の形態1に係る写真計測システムの概念図である。
【図2】本発明の実施の形態1に係る写真計測システムによる写真計測の作業手順を示すフローチャートである。
【図3】本発明の実施の形態1に係る写真計測システムのコンピュータ表示画面に表示された、計測対象物の設計データに基づく3DCADモデルを示す図である。
【図4】本発明の実施の形態1に係る写真計測システムの表示画面に表示した計測対象物モデルと、当該計測対象物モデルに対する仮想撮影を行う際の、仮想撮影位置・方向の設定例である。
【図5】本発明の実施の形態1に係る写真計測システムにおける、論理計測ポイントの抽出方法を示す図である。
【図6】本発明の実施の形態1に係る写真計測システムにおける、他の論理計測ポイントの抽出方法を示す図である。
【図7】本発明の実施の形態1に係る写真計測システムで撮影した実写真をコンピュータの画面に表示した図である。
【図8】本発明の実施の形態1に係る写真計測システムで撮影した実写真をコンピュータの画面に表示した図である。
【図9】本発明の実施の形態2に係る写真計測システムの概念図である。
【図10】本発明の実施の形態2に係る写真計測システムによる写真計測の作業手順を示すフローチャートである。
【図11】本発明の実施の形態1に係る写真計測システムで論理計測ポイントの抽出ができない場合を示す図である。
【図12】本発明の実施の形態2に係る写真計測システムにおける、論理計測ポイントの抽出方法を示す図である。
【図13】本発明の実施の形態2に係る写真計測システムにおける、仮想補助照明の配置のバリエーションを示す図である。
【図14】本発明の実施の形態3に係る写真計測システムによる写真計測の作業手順を示すフローチャートである。
【発明を実施するための形態】
【0015】
実施の形態1.
本発明の実施の形態1を図に基づいて説明する。
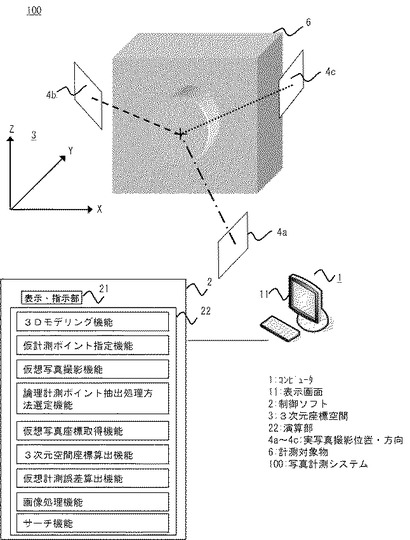
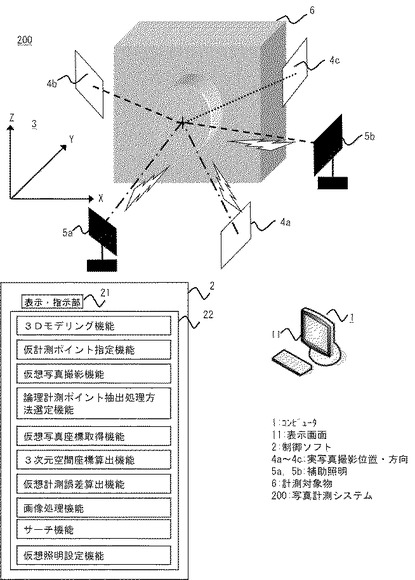
図1は、本実施の形態に係る写真計測システム100の全体を示す概念図である。
コンピュータ1には、現物としての計測対象物6の3DCADデータが保存されており、この3DCADデータを元に、表示画面11に計測対象物6の3Dモデルを表示(モデリング)する制御ソフト2がロードされている。
制御ソフト2には、画面表示を担当する表示・指示部21と各種演算をおこなう演算部22が備えられている。
演算部22には、3Dモデリング機能、仮計測ポイント指定機能等が備えられている。
【0016】
写真計測システム100は、現物である計測対象物6に対する実際の写真撮影を行う前に、コンピュータ1によって仮想的に写真計測のシミュレーションを行い、計測対象物6が設置されている現実の3次元座標空間3上で、実際の写真撮影を行うべき実写真撮影位置・方向4a〜4cを決定し、これらを現場作業員が使用する実撮影指示書として出力するために使用される。
【0017】
次に、写真計測システム100による写真計測の流れを、図を用いて説明する。
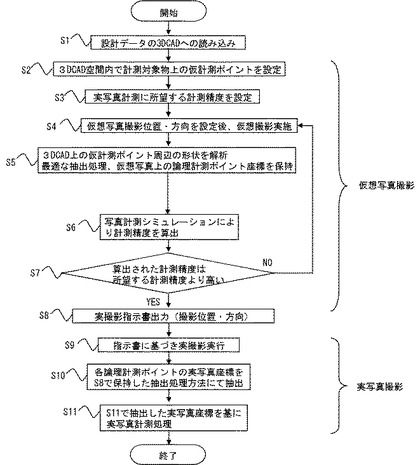
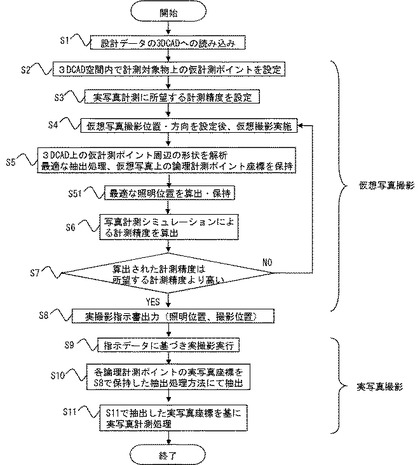
図2は、写真計測の作業手順を示すフローチャートである。
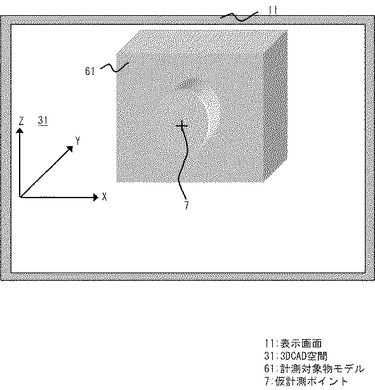
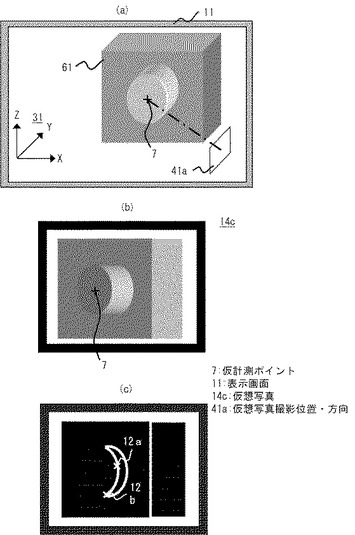
図3は、コンピュータ1の表示画面11に表示された計測対象物6の設計データに基づく3DCADモデル(以後、計測対象物モデル61と言う)を示す図である。
【0018】
まず、ステップS1では、制御ソフト2の3Dモデリング機能により、計測対象物6の設計データを3DCAD(3次元CAD)に取り込んで、3DCAD空間31(3DCAD上の仮想3次元空間)内に計測対象物モデル61(図では立方体に円形凸部を備えた物としている)を作成して表示画面11に表示する。
【0019】
ステップS2では、表示画面11に表示した計測対象物モデル61において、3次元座標を算出したい部分のおおよその位置に仮計測ポイント7を設定する。
この機能は、制御ソフト2の仮計測ポイント指定機能が担当する。
図3では、例えば上記モデルの円形凸部の前面のおおよそ中心位置に仮計測ポイント7を設定している。
ここで、「おおよその中心位置」に仮計測ポイント7を設定するのは次の理由による。
この例において、円形凸部の真の中心座標を3DCADデータから算出することは容易である。しかし、写真計測においては、最終的には、計測ポイントを実写真自体から抽出する必要がある。
そこで、写真計測シミュレーションを用いて、仮計測ポイント7が設定された位置が存在する部分の中心位置(円形凸部の前面の中心)を、計測対象物モデル61に対して仮想撮影した仮想写真から算出し、算出した座標と3DCADデータから算出した真の中心座標との誤差を計算し、仮想撮影した位置、方向等が、実際の写真撮影に適しているか否かを事前に判断するのである。
【0020】
ステップS3では、実際に写真計測を行う際に所望する計測精度を設定する。
ここで言う計測精度とは、実物の計測対象物6が仮に正確に製造できているとした場合に、当該計測対象物6を写真計測した場合に発生し得る計測誤差を言う。
例えば、±0.5mmのように計測精度を設定する。
【0021】
図4は、表示画面11に表示した計測対象物モデル61と、当該計測対象物モデル61に対する仮想撮影を行う際の、仮想写真撮影位置・方向41(図4では41a〜41cの3箇所)の設定例である。
ステップS4では、3DCAD空間31内において、計測対象物モデル61上に設定された仮計測ポイント7を撮影可能な領域内に、2箇所以上の仮想写真撮影位置・方向41を設定する。
そして、設定された各仮想写真撮影位置・方向41a〜41cにおいて、仮計測ポイント7を仮想撮影した各仮想写真を得る。
この機能は、制御ソフト2の仮想写真撮影機能が担当する。
【0022】
ステップS5では、計測対象物モデル61を基に、上記ステップS2にて3DCAD空間31内で設定した仮計測ポイント7及びその周辺を解析し、ステップS4で取得した仮想写真から特定の写真座標(後述の論理計測ポイント)を精度良く抽出するために最適な抽出処理方法を、演算部22内に実装されている処理方法の中から選択して保持するとともに、各仮想写真から論理計測ポイントの写真座標を算出して保持する。
この機能は、制御ソフト2の論理計測ポイント抽出処理方法選定機能が担当する。
【0023】
具体例を以下で説明する。
図3に示すように、3DCAD空間31において、計測対象物モデル61の円形凸部の前面のほぼ中心に仮計測ポイント7が設定されている。
まず、演算部22では、設定された仮計測ポイント7の計測対象物モデル61内での位置等を解析する。
例えば、仮計測ポイント7が存在する平面の位置を計算し、他の部材を構成する面との角度、位置関係を求める、
また、仮計測ポイント7が存在する平面の形状が、どのような形状であるかを解析により求める。
図3の場合、仮計測ポイント7が、円形凸部の前面ほぼ中心に設定されている情報を解析により得る。
【0024】
次に、前述の解析で得た情報を元に、3DCAD空間31内において、ステップ4で取得した仮想写真から、仮計測ポイント7の周辺にあって真の仮想計測ポイントとして採用すべき論理計測ポイントを抽出するために最適な座標抽出処理方法を選択して保持する。
計測対象物モデル61の円形凸部の前面ほぼ中心に仮計測ポイント7を設定している場合、論理計測ポイントは、円形凸部前面の外周輪郭部より算出可能であると判定される。
【0025】
このことを図5を用いて説明する。
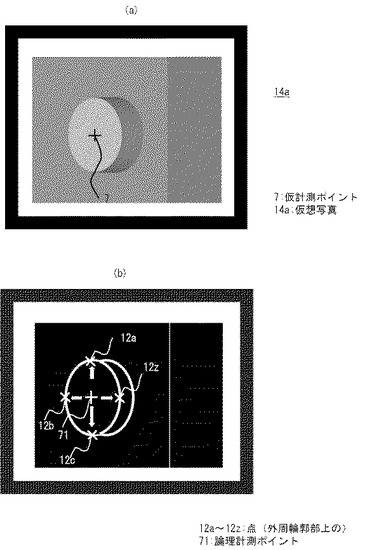
図5(a)は、計測対象物モデル61の円形凸部があり、その前面ほぼ中心に仮計測ポイント7が設定されている仮想写真14aを示す図である。
図5(b)は、図5(a)の仮想写真14aから、論理計測ポイント71となる円形凸部前面の中心座標を取得するために、仮想写真14aの輪郭が抽出できるように濃淡を2値化処理した画像データである。
【0026】
図5(b)に示すように、円形凸部の真の前面中心座標は、円形凸部の外周輪郭部上にある複数の点12a〜12zのそれぞれの写真座標がわかれば、各座標を基に最小二乗法を用いた楕円近似により算出することができる。
外周輪郭部上の点の探索方法は、図5(a)のような円形凸部の場合、図5(b)のように、中心があると考えられる側の1点を始点として、同心円状に外側に向かって輪郭部をサーチしていき、2値データから外周輪郭部上の点の座標を得ることができる。
なお、仮想写真14aからのデータの2値化は、制御ソフト2の画像処理機能が担当し、上述のサーチは、サーチ機能が担当する。
【0027】
他の形状をした構造物の計測ポイントの抽出処理方法例を、図6を用いて説明する。
図6(a)は、対象部分が円形凹部を形成している仮想写真14bの図である。
図6(b)は、図6(a)の仮想写真14bから、論理計測ポイント71となる円形凹部の開口部の中心座標を取得するために、仮想写真14bの輪郭が抽出できるように2値化処理した画像データである。
【0028】
図6(b)に示すように、論理計測ポイントがあると考えられる点を終点として、同心円状に外側から内側に向かって所定の範囲に渡ってサーチしていくことで、外周輪郭部上の点12(複数)の座標を得ることができる。
そしてこのようにして得られた複数の座標を基に、論理計測ポイント71となる中心座標を算出することができる。
上記サーチは、制御ソフト2のサーチ機能が担当する。
【0029】
なお、仮想写真を元にこのサーチを行う始点、又は終点は、ステップS2で設定された仮計測ポイント7であるため、この座標は既知の値である。
一方、後述する実際の写真計測では、始点、終点が不明であるため、ここで求めた各論理計測ポイント71の写真座標をコンピュータ1の内部に保持しておき、実写真計測時に利用することで精度良く実写真の外周輪郭を抽出することが可能となる。
この詳細は、ステップS10で説明する。
【0030】
上述の過程において選択・計算された、抽出処理方法、仮想写真上の論理計測ポイント71の座標は、各論理計測ポイント71毎にコンピュータ1に保持される。
なお、本例では仮計測ポイント7に円形凸部の中心部、論理計測ポイント71の座標抽出処理方法として最小二乗法の楕円近似を用いる方法を示したが、他の形状の部位における仮計測ポイント7の設定方法や、演算方法による座標抽出方法も併用される。
例えば、対象部分の表面形状が四角形であると判断した場合は、輪郭から対角線を取得して交点を論理計測ポイント71として抽出する。
この機能は、制御ソフト2の仮想写真座標取得機能が担当する。
【0031】
ステップS6では、ステップS5において写真計測シミュレーションによって取得した各論理計測ポイント71の写真座標から、制御ソフト2の3次元空間座標算出機能によって得られる仮想3次元空間座標と、3DCADデータから直接計算して取得した円形凸部の前面中心の仮想3次元空間座標の差としての計測精度を算出する。
この機能は、制御ソフト2の仮想計測誤差算出機能が担当する。
【0032】
ステップS7では、上記ステップS6において算出した計測精度と、ステップS3において設定した、実際の撮影写真を用いて写真計測を行う場合に計測者が所望する計測精度との比較を行う。
ステップS6において算出された計測精度がステップS3において設定した計測者の所望する計測精度よりも低い場合、ステップS4に戻って3DCAD空間31内での仮計測ポイント7に対する撮影位置を再設定して、ステップ5〜7を繰り返す。
【0033】
ステップS7において、ステップS6で算出した仮想写真を用いた写真計測シミュレーションによる計測精度が、ステップS3で設定した実際の撮影写真を用いて写真計測を行う場合に所望する計測精度以上である場合には、ステップS8に進む。
そして、ステップS8では、ステップS4で設定した仮想写真撮影位置・方向等を、精度の保証された実際の写真計測時のカメラの位置およびカメラの方向として、論理計測ポイント71の仮想3次元座標又はそれぞれの仮想写真における論理計測ポイント71の写真座標、及びその抽出処理方法とともに、実撮影指示書として表示画面11に表示又は印刷出力する。
【0034】
ステップS9以下の各ステップは、実写真撮影の工程と実写真処理の工程である。
ステップS9では、ステップS8で出力した実撮影指示書に基づいた撮影位置・撮影方向で、実際に計測対象物6を写真撮影する。
【0035】
ステップS10では、上記ステップS9で撮影した実写真のデジタルデータを用いて、ステップS5で選択、保持していた、仮想写真における各論理計測ポイント71の写真座標、各論理計測ポイント71毎の抽出処理方法を用いて実計測ポイントの2次元の写真座標を抽出する。
【0036】
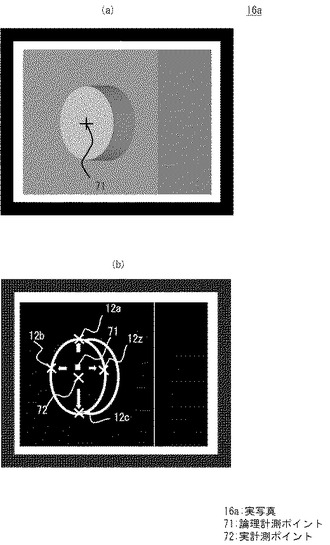
具体例を図7を用いて説明する。
図7は、実写真をコンピュータ1の画面に表示した図である。
図7(a)は、実際の写真計測に用いる実写真16aである。
実写真16a上には、実際は、論理計測ポイント71を示す目印などは写っていない。
まず、コンピュータ1に実際に撮影された写真データを読み込む。次に、実写真16aの写真データのエッジ部を抽出した2値画像を生成する。
図7(b)は、図7(a)の実写真16aからエッジ部を強調して2値処理した画像である。
この画像を利用して、実際に写真計測に利用する実計測ポイント72の写真座標を抽出する。
【0037】
ステップS5において、各論理計測ポイント71毎に保持させておいた写真座標抽出処理方法を元に、実計測ポイント72の写真座標を抽出する。
図7(a)のように論理計測ポイント71が円形凸部の中心に設定されていた場合、実計測ポイント72となる円形凸部の前面の中心座標を算出するために、論理計測ポイント71から外側にサーチして得た外周輪郭部上の複数点を用いる抽出方法が選択・保存されている。
そこで、ステップS5で保持しておいた、論理計測ポイント71の座標を始点として、外側に向けて同心円状にサーチし、外周輪郭上の複数の座標を得て、これらの点から中心座標である実計測ポイント72の写真座標を得る。
【0038】
また、図8のように論理計測ポイント71が円形凹部の開口部の中心に設定されていた場合は、円形凹部の外側のエッジが必要であるため、ステップS5で保持しておいた論理計測ポイント71の写真座標へ向けて外側から内側に同心円状にサーチしていく処理方法を適用する。
このように、計測対象物モデル61を利用して、論理計測ポイント71毎に抽出処理方法を保存しておいて、実写真を用いた写真座標抽出処理方法として選択することで、精度良く実計測ポイント72の2次元写真座標を抽出することができる。
【0039】
ステップS11では、上記ステップS10で各実写真から抽出した各実計測ポイント72の2次元実写真座標を利用して3次元の写真計測を実施する。
【0040】
本実施の形態に係る写真計測システムおよび写真計測用写真撮影条件決定方法によれば、構造物の中で一定の範囲を占める部分から、写真計測用に適したピンポイントをシミュレーションにより抽出し、実際の写真計測時に所定の精度を期待できる位置を事前に確認することができる。
したがって、作業の無駄を省き効率よく写真計測を実施できる。
また、仮計測ポイントから論理計測ポイントを得、論理計測ポイントから実計測ポイントを得ることにより、精度の高い計測ポイントの抽出をすることができる。
【0041】
実施の形態2.
以下、この発明の実施の形態2を、実施の形態1と異なる部分を中心に図を用いて説明する。
図9は、本発明の実施の形態2に係る写真計測システムの概念図である。
図10は、本発明の実施の形態2に係る写真計測システムによる写真計測の作業手順を示すフローチャートである。
写真計測システム200では、仮想写真の写真撮影及び、実写真の写真撮影において照明を利用する。
図9の例では、実写真撮影位置・方向4aでの実写真撮影では、カメラに取り付けたストロボと両側からの補助照明5a、5bを利用している。
【0042】
図10に示すフローチャートと、実施の形態1で利用した図2に示すフローチャートとの違いは、ステップ5の直後に、最適な照明位置を算出し保持するステップS51を追加した部分と、ステップ8で出力する実撮影指示書に、実写真で使用する照明の位置、方向、光量などの条件データを付加した部分である。
【0043】
まず、ステップS51では、仮計測ポイント7の輪郭を鮮明に写すために最適な照明位置を算出・保持する。
具体例を図11、図12を用いて説明する。
図11(a)は、3DCAD空間31内において計測対象物モデル61の円形凸部の前面ほぼ中心に仮計測ポイント7を設定している。
そして、計測対象物モデル61に対して、向かって右前方に仮想写真撮影位置を設定して、仮計測ポイント7に向かってストロボ無しで撮影している図である。
図11(b)は、図11(a)の状態で撮影された仮想写真14cの図である。
図11(c)は、図11(b)の仮想写真14cを、論理計測ポイントの写真座標を抽出するために2値化処理した画像データを示す図である。
図12(a)は、算出された照明を利用して計測対象物モデル61を照らして仮想撮影している状態を示す概要図である。
図12(b)は、図12(a)で撮影された仮想写真14dの図である。
図12(c)は、図12(b)の仮想写真14dを、論理計測ポイント71の写真座標を抽出するために2値化処理した画像データを示す図である。
【0044】
この例では、計測対象物モデル61に向かって右前方の斜め方向からの仮想撮影であるため、得られる写真は図11(b)のように円形凸部の右側は外周輪郭部が際立っているが、前面の左側外周輪郭部が本体前面と同化し、判別しにくくなっている。
そのため、図11(c)のように、輪郭を抽出する際にエッジが消失してしまうことがある。
このような場合は、論理計測ポイントである円形凸部の前面中心座標の算出に必要な外周輪郭部の座標が得られないため、精度良く円形凸部前面の中心座標、すなわち論理計測ポイントの仮想写真座標を得ることができない。
【0045】
そこで本実施の形態では、論理計測ポイントの周辺の輪郭を鮮明に撮影できるよう、前述の各仮計測ポイント7近傍の形状を解析して得た情報と各撮影位置の関係から、仮想照明位置を算出する。
例えば、図11(a)では、計測対象物モデル61に向かって右前方を仮想写真撮影位置に設定しており、かつ、仮計測ポイント7は円形凸部前面のほぼ中心位置であることより、円形凸部の外周輪郭部を際立たせるためには、仮想写真撮影位置・方向41aに仮想ストロボを設置し、更に仮想補助照明51aを仮計測ポイント7を挟んで仮想写真撮影位置・方向41aの逆側、すなわち計測対象物モデル61の左側に位置するよう配置すべき事が算出される。
なお、この機能は、制御ソフト2の仮想照明設定機能が担当する。
【0046】
図12(a)〜(c)に示すように、仮想写真撮影位置・方向41aからのカメラストロボに加え、左側にも仮想補助照明51aを設けることにより、円形凸部の両側の外周輪郭部が鮮明に撮影できることが分かる。
これにより、正確に論理計測ポイント71となる円形凸部前面の中心座標を計算できる。
【0047】
図13は、仮想補助照明の配置のバリエーションを示す図である。
先に説明した図12の例では、仮想補助照明は一つであったが、複数の仮想補助照明が同期する構成でもよい。例えば、図13において、仮想写真撮影位置・方向41aで撮影する場合、仮想補助照明51aが対応し、その他の仮想補助照明はOFFとなってもよい。また、他の例として、仮想写真撮影位置・方向41bで撮影する場合、複数の仮想補助照明51a,51bが仮計測ポイント7を照射する組み合わせでもよい。
【0048】
ステップS8では、ステップS4、ステップS51で設定した仮想写真撮影位置・方向、仮想補助照明位置等を、精度の保証された実際の写真計測時の、照明位置、照明の向き、カメラの位置およびカメラの方向として、論理計測ポイント71の仮想3次元座標又はそれぞれの仮想写真における論理計測ポイント71の写真座標、及びその抽出処理方法とともに、実撮影指示書として表示画面11に表示又は印刷出力する。
【0049】
本実施の形態に係る写真計測システムおよび写真計測用写真撮影条件決定方法によれば、実施の形態1の効果に加えて、予め、高精度の期待できる撮影場所、方向、照明等の撮影条件を特定でき、写真計測を効率よく実施できる。
【0050】
実施の形態3.
以下、この発明の実施の形態3を、実施の形態1と異なる部分を中心に図を用いて説明する。
図14は、本発明の実施の形態3に係る写真計測システムによる写真計測の作業手順を示すフローチャートである。
図14に示すフローチャートと、実施の形態2で利用した図10に示すフローチャートとの違いは、ステップS7での計測精度の判定がNOであった場合の戻り先をステップS51の照明の再設定としている点である。
ステップS51では、照明の位置や明るさをのみを変更して再度ステップS6の写真計測シミュレーションを実施する。
【0051】
本実施の形態に係る写真計測システムおよび写真計測用写真撮影条件決定方法によれば、照明位置を変更するだけで所望の計測精度を確保できる場合が多く、写真計測シミュレーション及び実際の写真計測を効率よく実施できる。
【0052】
なお、本発明は、その発明の範囲内において、実施の形態を自由に組み合わせたり、各実施の形態を適宜、変形、省略することが可能である。
【符号の説明】
【0053】
100,200 写真計測システム、1 コンピュータ、11 表示画面、
2 制御ソフト、21 表示・指示部、22 演算部、3 3次元座標空間、
31 3DCAD空間、4a 実写真撮影位置・方向、5a 補助照明、
6 計測対象物、7 仮計測ポイント、12a〜12z 点、
14a〜14d 仮想写真、16a 実写真、71 論理計測ポイント、
72 実計測ポイント、41a,41b 仮想写真撮影位置・方向、
51a 仮想補助照明、61 計測対象物モデル。
【技術分野】
【0001】
本発明は、写真計測を実施する際、所望の計測精度を確実に得ることができる写真撮影条件を指示する写真計測システムおよび写真計測用写真撮影条件決定方法に関するものである。
【背景技術】
【0002】
大型配管や船体のブロック等の立体的な構造物を製作した後、これら構造物において特定の部分が設計図通りに作られているか否か、たとえば、孔を設けた場合に、その孔の位置が正しいかどうかを確認するために、実際に製作された構造物についての計測が必要になる場合がある。
大型配管や船体ブロックのような、直接的な寸法の測定が困難な構造物の計測に用いられる手法の一つとして、写真計測が用いられる。
【0003】
写真計測は、デジタルカメラで、計測すべき構造物を計測対象物として撮影し、撮像素子上にそれぞれ投影される計測対象物の像の寸法と、カメラの焦点距離と、カメラと計測対象物との距離を基にして、計測対象物の実際の寸法を算出するものであり、計測対象物が立体的な構造物の場合には、異なる角度から写した複数の写真を組み合わせて使用することで、3次元的な寸法を計測するものである。
【0004】
このような写真計測では、計測対象物の写真を撮影した写真撮影位置(カメラ位置とカメラの向き)、使用する写真の枚数によって計測精度が変動することが一般に知られている。又、写真計測では実際に計測対象物を撮影した実写真において、3次元座標を求めたい計測ポイントの写真上の座標(デジタル写真においては画素位置)を求める必要あるが、該計測ポイントの座標抽出精度によっても計測精度が大きく変動することが一般に知られている。
【0005】
したがって、写真計測の精度を確保するための写真撮影位置、すなわち、計測対象物を角度を変えて撮影するためのカメラ設置位置の決定、及び、該各カメラ設置位置におけるカメラの向きの決定も重要であるとともに、上記計測対象物上の計測ポイントの写真上における座標を精度良く抽出できる撮影方法・抽出処理方法が非常に重要である。
【0006】
例えば、特許文献1に示すように、誰でも容易に所望の計測精度が得られ写真撮影位置決定方法として、計測対象物の設計データを3DCAD上に取り込んで作成したモデルに対し、写真計測により三次元座標を求めたい計測ポイントを3DCAD上で設定し、次に、3DCAD上で設定された計測ポイントを撮影し得る少なくとも2個所の仮想写真撮影位置を3DCAD空間内にて設定し、該各仮想写真撮影位置にて撮影された仮想写真を基に写真計測を行った場合に得られる計測精度を予め算出し、算出された計測精度が実際の計測時に所望される計測精度以上となった場合に、上記各仮想写真撮影位置を実写真撮影位置として指示する撮影位置指示書を出力させることを特徴とする写真計測用写真撮影位置の決定方法が提案されている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2002−39753
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、特許文献1に示す写真撮影位置決定方法では、計測ポイントを3D画像上で任意に指定しているだけで、実写真座標からの計測ポイントの抽出精度についてはまったく考慮されていない。
このため、実際の写真計測において、計測ポイントの実写真上での撮影状態によっては、精度良く計測ポイントの写真座標を抽出できない。
したがって、写真計測シミュレーションで得られた計測精度が、実際の写真計測では得られない場合が多いという問題があった。
【0009】
本発明は、このような課題を解消するためになされたものであり、実写真から精度良く計測ポイントの写真座標を抽出することを可能とするために、その前段階である写真計測シミュレーションの精度を向上させることができる写真計測システムおよび写真計測用写真撮影条件決定方法を提供することを目的とする。
【課題を解決するための手段】
【0010】
この発明に係る写真計測システムは、
計測対象物のデジタル写真撮影を行い、その写真に計測ポイントを設定して解析することにより計測対象物の計測ポイントの3次元座標を解析する写真計測システムにおいて、
計測対象物の設計データを読み込み、仮想の3次元の計測対象物モデルを生成する3Dモデリング機能と、
計測対象物モデルに対して、仮想写真計測を所望する位置を仮に仮計測ポイントとして指定する仮計測ポイント指定機能と、
仮計測ポイントに対する仮想写真の撮影位置・方向を指定して仮想写真を撮影する仮想写真撮影機能と、
仮想写真の仮計測ポイントの周囲の形状を解析することにより、仮計測ポイント近傍の自動抽出可能な位置としての論理計測ポイントを、仮想写真から自動抽出する論理計測ポイント抽出処理方法を選定する論理計測ポイント抽出処理方法選定機能と、
異なる位置から撮影された複数の仮想写真から、論理計測ポイント抽出処理方法を用いて自動抽出された同一の論理計測ポイントの、それぞれの仮想写真上における仮想写真座標を取得する仮想写真座標取得機能と、
仮想写真座標取得機能で取得した複数の仮想写真座標と、それぞれの仮想写真の仮想撮影をした位置、方向から、論理計測ポイントの仮想3次元空間座標を算出する3次元空間座標算出機能と、
計測対象物の設計データから直接求めた論理計測ポイントとなるべきポイントの仮想3次元空間座標と、3次元空間座標算出機能により求めた論理計測ポイントの仮想3次元空間座標との誤差を算出する仮想計測誤差算出機能とを有する制御ソフトを備えたコンピュータを備えたものである。
【0011】
また、この発明に係る写真計測用写真撮影条件決定方法は、計測対象物のデジタル写真撮影を行うための写真撮影条件決定方法であって、
計測対象物の設計データを読み込み、仮想の3次元の計測対象物モデルを生成するステップと、
計測対象物モデルに対して、仮想写真計測を所望する位置を仮に仮計測ポイントとして指定するステップと、
実写真計測時に必要とする計測精度を設定するステップと、
仮計測ポイントに対する仮想写真の撮影位置・方向を指定して仮想写真を撮影するステップと、
仮計測ポイントの周囲の形状を解析することにより、仮想写真から自動抽出可能な位置としての論理計測ポイント抽出処理方法を選定して論理計測ポイントを取得するステップと、
異なる位置から撮影された複数の仮想写真から、自動抽出された同一の論理計測ポイントの、それぞれの仮想写真上における仮想写真座標を取得するステップと、
仮想写真座標取得機能で取得した複数の仮想写真座標と及びそれぞれの仮想写真の仮想撮影をした位置、方向から、論理計測ポイントの仮想3次元空間座標を算出するステップと、
計測対象物の設計データから直接求めた論理計測ポイントとなるべきポイントの仮想3次元空間座標と、仮想写真から求めた論理計測ポイントの仮想3次元空間座標との誤差を算出するステップとからなるものである。
【発明の効果】
【0012】
この発明に係る写真計測システムは、
計測対象物の設計データを読み込み、仮想の3次元の計測対象物モデルを生成する3Dモデリング機能と、
計測対象物モデルに対して、仮想写真計測を所望する位置を仮に仮計測ポイントとして指定する仮計測ポイント指定機能と、
仮計測ポイントに対する仮想写真の撮影位置・方向を指定して仮想写真を撮影する仮想写真撮影機能と、
仮想写真の仮計測ポイントの周囲の形状を解析することにより、仮計測ポイント近傍の自動抽出可能な位置としての論理計測ポイントを、仮想写真から自動抽出する論理計測ポイント抽出処理方法を選定する論理計測ポイント抽出処理方法選定機能と、
異なる位置から撮影された複数の仮想写真から、論理計測ポイント抽出処理方法を用いて自動抽出された同一の論理計測ポイントの、それぞれの仮想写真上における仮想写真座標を取得する仮想写真座標取得機能と、
仮想写真座標取得機能で取得した複数の仮想写真座標と、それぞれの仮想写真の仮想撮影をした位置、方向から、論理計測ポイントの仮想3次元空間座標を算出する3次元空間座標算出機能と、
計測対象物の設計データから直接求めた論理計測ポイントとなるべきポイントの仮想3次元空間座標と、3次元空間座標算出機能により求めた論理計測ポイントの仮想3次元空間座標との誤差を算出する仮想計測誤差算出機能とを有する制御ソフトを備えたコンピュータを備えたものなので、構造物の中で一定の範囲を占める部分から、写真計測用に適したピンポイントをシミュレーションにより抽出し、実際の写真計測時に所定の精度を期待できる位置を事前に確認することができる。
これにより、作業の無駄を省き効率よく写真計測を実施できる。
【0013】
また、この発明に係る写真計測用写真撮影条件決定方法は、計測対象物のデジタル写真撮影を行うための写真撮影条件決定方法であって、
計測対象物の設計データを読み込み、仮想の3次元の計測対象物モデルを生成するステップと、
計測対象物モデルに対して、仮想写真計測を所望する位置を仮に仮計測ポイントとして指定するステップと、
実写真計測時に必要とする計測精度を設定するステップと、
仮計測ポイントに対する仮想写真の撮影位置・方向を指定して仮想写真を撮影するステップと、
仮計測ポイントの周囲の形状を解析することにより、仮想写真から自動抽出可能な位置としての論理計測ポイント抽出処理方法を選定して論理計測ポイントを取得するステップと、
異なる位置から撮影された複数の仮想写真から、自動抽出された同一の論理計測ポイントの、それぞれの仮想写真上における仮想写真座標を取得するステップと、
仮想写真座標取得機能で取得した複数の仮想写真座標と及びそれぞれの仮想写真の仮想撮影をした位置、方向から、論理計測ポイントの仮想3次元空間座標を算出するステップと、
計測対象物の設計データから直接求めた論理計測ポイントとなるべきポイントの仮想3次元空間座標と、仮想写真から求めた論理計測ポイントの仮想3次元空間座標との誤差を算出するステップとからなるものなので、構造物の中で一定の範囲を占める部分から、写真計測用に適したピンポイントをシミュレーションにより抽出し、実際の写真計測時に所定の精度を期待できる位置を事前に確認することができる。
これにより、作業の無駄を省き効率よく写真計測を実施できる。
【図面の簡単な説明】
【0014】
【図1】本発明の実施の形態1に係る写真計測システムの概念図である。
【図2】本発明の実施の形態1に係る写真計測システムによる写真計測の作業手順を示すフローチャートである。
【図3】本発明の実施の形態1に係る写真計測システムのコンピュータ表示画面に表示された、計測対象物の設計データに基づく3DCADモデルを示す図である。
【図4】本発明の実施の形態1に係る写真計測システムの表示画面に表示した計測対象物モデルと、当該計測対象物モデルに対する仮想撮影を行う際の、仮想撮影位置・方向の設定例である。
【図5】本発明の実施の形態1に係る写真計測システムにおける、論理計測ポイントの抽出方法を示す図である。
【図6】本発明の実施の形態1に係る写真計測システムにおける、他の論理計測ポイントの抽出方法を示す図である。
【図7】本発明の実施の形態1に係る写真計測システムで撮影した実写真をコンピュータの画面に表示した図である。
【図8】本発明の実施の形態1に係る写真計測システムで撮影した実写真をコンピュータの画面に表示した図である。
【図9】本発明の実施の形態2に係る写真計測システムの概念図である。
【図10】本発明の実施の形態2に係る写真計測システムによる写真計測の作業手順を示すフローチャートである。
【図11】本発明の実施の形態1に係る写真計測システムで論理計測ポイントの抽出ができない場合を示す図である。
【図12】本発明の実施の形態2に係る写真計測システムにおける、論理計測ポイントの抽出方法を示す図である。
【図13】本発明の実施の形態2に係る写真計測システムにおける、仮想補助照明の配置のバリエーションを示す図である。
【図14】本発明の実施の形態3に係る写真計測システムによる写真計測の作業手順を示すフローチャートである。
【発明を実施するための形態】
【0015】
実施の形態1.
本発明の実施の形態1を図に基づいて説明する。
図1は、本実施の形態に係る写真計測システム100の全体を示す概念図である。
コンピュータ1には、現物としての計測対象物6の3DCADデータが保存されており、この3DCADデータを元に、表示画面11に計測対象物6の3Dモデルを表示(モデリング)する制御ソフト2がロードされている。
制御ソフト2には、画面表示を担当する表示・指示部21と各種演算をおこなう演算部22が備えられている。
演算部22には、3Dモデリング機能、仮計測ポイント指定機能等が備えられている。
【0016】
写真計測システム100は、現物である計測対象物6に対する実際の写真撮影を行う前に、コンピュータ1によって仮想的に写真計測のシミュレーションを行い、計測対象物6が設置されている現実の3次元座標空間3上で、実際の写真撮影を行うべき実写真撮影位置・方向4a〜4cを決定し、これらを現場作業員が使用する実撮影指示書として出力するために使用される。
【0017】
次に、写真計測システム100による写真計測の流れを、図を用いて説明する。
図2は、写真計測の作業手順を示すフローチャートである。
図3は、コンピュータ1の表示画面11に表示された計測対象物6の設計データに基づく3DCADモデル(以後、計測対象物モデル61と言う)を示す図である。
【0018】
まず、ステップS1では、制御ソフト2の3Dモデリング機能により、計測対象物6の設計データを3DCAD(3次元CAD)に取り込んで、3DCAD空間31(3DCAD上の仮想3次元空間)内に計測対象物モデル61(図では立方体に円形凸部を備えた物としている)を作成して表示画面11に表示する。
【0019】
ステップS2では、表示画面11に表示した計測対象物モデル61において、3次元座標を算出したい部分のおおよその位置に仮計測ポイント7を設定する。
この機能は、制御ソフト2の仮計測ポイント指定機能が担当する。
図3では、例えば上記モデルの円形凸部の前面のおおよそ中心位置に仮計測ポイント7を設定している。
ここで、「おおよその中心位置」に仮計測ポイント7を設定するのは次の理由による。
この例において、円形凸部の真の中心座標を3DCADデータから算出することは容易である。しかし、写真計測においては、最終的には、計測ポイントを実写真自体から抽出する必要がある。
そこで、写真計測シミュレーションを用いて、仮計測ポイント7が設定された位置が存在する部分の中心位置(円形凸部の前面の中心)を、計測対象物モデル61に対して仮想撮影した仮想写真から算出し、算出した座標と3DCADデータから算出した真の中心座標との誤差を計算し、仮想撮影した位置、方向等が、実際の写真撮影に適しているか否かを事前に判断するのである。
【0020】
ステップS3では、実際に写真計測を行う際に所望する計測精度を設定する。
ここで言う計測精度とは、実物の計測対象物6が仮に正確に製造できているとした場合に、当該計測対象物6を写真計測した場合に発生し得る計測誤差を言う。
例えば、±0.5mmのように計測精度を設定する。
【0021】
図4は、表示画面11に表示した計測対象物モデル61と、当該計測対象物モデル61に対する仮想撮影を行う際の、仮想写真撮影位置・方向41(図4では41a〜41cの3箇所)の設定例である。
ステップS4では、3DCAD空間31内において、計測対象物モデル61上に設定された仮計測ポイント7を撮影可能な領域内に、2箇所以上の仮想写真撮影位置・方向41を設定する。
そして、設定された各仮想写真撮影位置・方向41a〜41cにおいて、仮計測ポイント7を仮想撮影した各仮想写真を得る。
この機能は、制御ソフト2の仮想写真撮影機能が担当する。
【0022】
ステップS5では、計測対象物モデル61を基に、上記ステップS2にて3DCAD空間31内で設定した仮計測ポイント7及びその周辺を解析し、ステップS4で取得した仮想写真から特定の写真座標(後述の論理計測ポイント)を精度良く抽出するために最適な抽出処理方法を、演算部22内に実装されている処理方法の中から選択して保持するとともに、各仮想写真から論理計測ポイントの写真座標を算出して保持する。
この機能は、制御ソフト2の論理計測ポイント抽出処理方法選定機能が担当する。
【0023】
具体例を以下で説明する。
図3に示すように、3DCAD空間31において、計測対象物モデル61の円形凸部の前面のほぼ中心に仮計測ポイント7が設定されている。
まず、演算部22では、設定された仮計測ポイント7の計測対象物モデル61内での位置等を解析する。
例えば、仮計測ポイント7が存在する平面の位置を計算し、他の部材を構成する面との角度、位置関係を求める、
また、仮計測ポイント7が存在する平面の形状が、どのような形状であるかを解析により求める。
図3の場合、仮計測ポイント7が、円形凸部の前面ほぼ中心に設定されている情報を解析により得る。
【0024】
次に、前述の解析で得た情報を元に、3DCAD空間31内において、ステップ4で取得した仮想写真から、仮計測ポイント7の周辺にあって真の仮想計測ポイントとして採用すべき論理計測ポイントを抽出するために最適な座標抽出処理方法を選択して保持する。
計測対象物モデル61の円形凸部の前面ほぼ中心に仮計測ポイント7を設定している場合、論理計測ポイントは、円形凸部前面の外周輪郭部より算出可能であると判定される。
【0025】
このことを図5を用いて説明する。
図5(a)は、計測対象物モデル61の円形凸部があり、その前面ほぼ中心に仮計測ポイント7が設定されている仮想写真14aを示す図である。
図5(b)は、図5(a)の仮想写真14aから、論理計測ポイント71となる円形凸部前面の中心座標を取得するために、仮想写真14aの輪郭が抽出できるように濃淡を2値化処理した画像データである。
【0026】
図5(b)に示すように、円形凸部の真の前面中心座標は、円形凸部の外周輪郭部上にある複数の点12a〜12zのそれぞれの写真座標がわかれば、各座標を基に最小二乗法を用いた楕円近似により算出することができる。
外周輪郭部上の点の探索方法は、図5(a)のような円形凸部の場合、図5(b)のように、中心があると考えられる側の1点を始点として、同心円状に外側に向かって輪郭部をサーチしていき、2値データから外周輪郭部上の点の座標を得ることができる。
なお、仮想写真14aからのデータの2値化は、制御ソフト2の画像処理機能が担当し、上述のサーチは、サーチ機能が担当する。
【0027】
他の形状をした構造物の計測ポイントの抽出処理方法例を、図6を用いて説明する。
図6(a)は、対象部分が円形凹部を形成している仮想写真14bの図である。
図6(b)は、図6(a)の仮想写真14bから、論理計測ポイント71となる円形凹部の開口部の中心座標を取得するために、仮想写真14bの輪郭が抽出できるように2値化処理した画像データである。
【0028】
図6(b)に示すように、論理計測ポイントがあると考えられる点を終点として、同心円状に外側から内側に向かって所定の範囲に渡ってサーチしていくことで、外周輪郭部上の点12(複数)の座標を得ることができる。
そしてこのようにして得られた複数の座標を基に、論理計測ポイント71となる中心座標を算出することができる。
上記サーチは、制御ソフト2のサーチ機能が担当する。
【0029】
なお、仮想写真を元にこのサーチを行う始点、又は終点は、ステップS2で設定された仮計測ポイント7であるため、この座標は既知の値である。
一方、後述する実際の写真計測では、始点、終点が不明であるため、ここで求めた各論理計測ポイント71の写真座標をコンピュータ1の内部に保持しておき、実写真計測時に利用することで精度良く実写真の外周輪郭を抽出することが可能となる。
この詳細は、ステップS10で説明する。
【0030】
上述の過程において選択・計算された、抽出処理方法、仮想写真上の論理計測ポイント71の座標は、各論理計測ポイント71毎にコンピュータ1に保持される。
なお、本例では仮計測ポイント7に円形凸部の中心部、論理計測ポイント71の座標抽出処理方法として最小二乗法の楕円近似を用いる方法を示したが、他の形状の部位における仮計測ポイント7の設定方法や、演算方法による座標抽出方法も併用される。
例えば、対象部分の表面形状が四角形であると判断した場合は、輪郭から対角線を取得して交点を論理計測ポイント71として抽出する。
この機能は、制御ソフト2の仮想写真座標取得機能が担当する。
【0031】
ステップS6では、ステップS5において写真計測シミュレーションによって取得した各論理計測ポイント71の写真座標から、制御ソフト2の3次元空間座標算出機能によって得られる仮想3次元空間座標と、3DCADデータから直接計算して取得した円形凸部の前面中心の仮想3次元空間座標の差としての計測精度を算出する。
この機能は、制御ソフト2の仮想計測誤差算出機能が担当する。
【0032】
ステップS7では、上記ステップS6において算出した計測精度と、ステップS3において設定した、実際の撮影写真を用いて写真計測を行う場合に計測者が所望する計測精度との比較を行う。
ステップS6において算出された計測精度がステップS3において設定した計測者の所望する計測精度よりも低い場合、ステップS4に戻って3DCAD空間31内での仮計測ポイント7に対する撮影位置を再設定して、ステップ5〜7を繰り返す。
【0033】
ステップS7において、ステップS6で算出した仮想写真を用いた写真計測シミュレーションによる計測精度が、ステップS3で設定した実際の撮影写真を用いて写真計測を行う場合に所望する計測精度以上である場合には、ステップS8に進む。
そして、ステップS8では、ステップS4で設定した仮想写真撮影位置・方向等を、精度の保証された実際の写真計測時のカメラの位置およびカメラの方向として、論理計測ポイント71の仮想3次元座標又はそれぞれの仮想写真における論理計測ポイント71の写真座標、及びその抽出処理方法とともに、実撮影指示書として表示画面11に表示又は印刷出力する。
【0034】
ステップS9以下の各ステップは、実写真撮影の工程と実写真処理の工程である。
ステップS9では、ステップS8で出力した実撮影指示書に基づいた撮影位置・撮影方向で、実際に計測対象物6を写真撮影する。
【0035】
ステップS10では、上記ステップS9で撮影した実写真のデジタルデータを用いて、ステップS5で選択、保持していた、仮想写真における各論理計測ポイント71の写真座標、各論理計測ポイント71毎の抽出処理方法を用いて実計測ポイントの2次元の写真座標を抽出する。
【0036】
具体例を図7を用いて説明する。
図7は、実写真をコンピュータ1の画面に表示した図である。
図7(a)は、実際の写真計測に用いる実写真16aである。
実写真16a上には、実際は、論理計測ポイント71を示す目印などは写っていない。
まず、コンピュータ1に実際に撮影された写真データを読み込む。次に、実写真16aの写真データのエッジ部を抽出した2値画像を生成する。
図7(b)は、図7(a)の実写真16aからエッジ部を強調して2値処理した画像である。
この画像を利用して、実際に写真計測に利用する実計測ポイント72の写真座標を抽出する。
【0037】
ステップS5において、各論理計測ポイント71毎に保持させておいた写真座標抽出処理方法を元に、実計測ポイント72の写真座標を抽出する。
図7(a)のように論理計測ポイント71が円形凸部の中心に設定されていた場合、実計測ポイント72となる円形凸部の前面の中心座標を算出するために、論理計測ポイント71から外側にサーチして得た外周輪郭部上の複数点を用いる抽出方法が選択・保存されている。
そこで、ステップS5で保持しておいた、論理計測ポイント71の座標を始点として、外側に向けて同心円状にサーチし、外周輪郭上の複数の座標を得て、これらの点から中心座標である実計測ポイント72の写真座標を得る。
【0038】
また、図8のように論理計測ポイント71が円形凹部の開口部の中心に設定されていた場合は、円形凹部の外側のエッジが必要であるため、ステップS5で保持しておいた論理計測ポイント71の写真座標へ向けて外側から内側に同心円状にサーチしていく処理方法を適用する。
このように、計測対象物モデル61を利用して、論理計測ポイント71毎に抽出処理方法を保存しておいて、実写真を用いた写真座標抽出処理方法として選択することで、精度良く実計測ポイント72の2次元写真座標を抽出することができる。
【0039】
ステップS11では、上記ステップS10で各実写真から抽出した各実計測ポイント72の2次元実写真座標を利用して3次元の写真計測を実施する。
【0040】
本実施の形態に係る写真計測システムおよび写真計測用写真撮影条件決定方法によれば、構造物の中で一定の範囲を占める部分から、写真計測用に適したピンポイントをシミュレーションにより抽出し、実際の写真計測時に所定の精度を期待できる位置を事前に確認することができる。
したがって、作業の無駄を省き効率よく写真計測を実施できる。
また、仮計測ポイントから論理計測ポイントを得、論理計測ポイントから実計測ポイントを得ることにより、精度の高い計測ポイントの抽出をすることができる。
【0041】
実施の形態2.
以下、この発明の実施の形態2を、実施の形態1と異なる部分を中心に図を用いて説明する。
図9は、本発明の実施の形態2に係る写真計測システムの概念図である。
図10は、本発明の実施の形態2に係る写真計測システムによる写真計測の作業手順を示すフローチャートである。
写真計測システム200では、仮想写真の写真撮影及び、実写真の写真撮影において照明を利用する。
図9の例では、実写真撮影位置・方向4aでの実写真撮影では、カメラに取り付けたストロボと両側からの補助照明5a、5bを利用している。
【0042】
図10に示すフローチャートと、実施の形態1で利用した図2に示すフローチャートとの違いは、ステップ5の直後に、最適な照明位置を算出し保持するステップS51を追加した部分と、ステップ8で出力する実撮影指示書に、実写真で使用する照明の位置、方向、光量などの条件データを付加した部分である。
【0043】
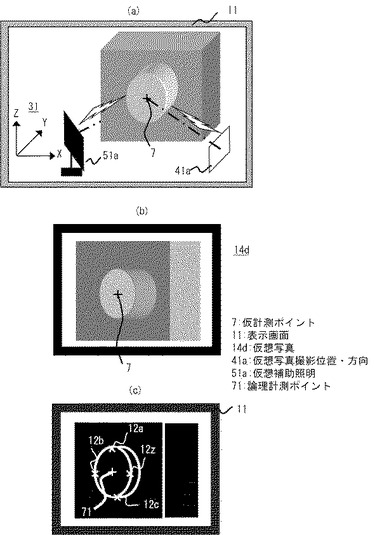
まず、ステップS51では、仮計測ポイント7の輪郭を鮮明に写すために最適な照明位置を算出・保持する。
具体例を図11、図12を用いて説明する。
図11(a)は、3DCAD空間31内において計測対象物モデル61の円形凸部の前面ほぼ中心に仮計測ポイント7を設定している。
そして、計測対象物モデル61に対して、向かって右前方に仮想写真撮影位置を設定して、仮計測ポイント7に向かってストロボ無しで撮影している図である。
図11(b)は、図11(a)の状態で撮影された仮想写真14cの図である。
図11(c)は、図11(b)の仮想写真14cを、論理計測ポイントの写真座標を抽出するために2値化処理した画像データを示す図である。
図12(a)は、算出された照明を利用して計測対象物モデル61を照らして仮想撮影している状態を示す概要図である。
図12(b)は、図12(a)で撮影された仮想写真14dの図である。
図12(c)は、図12(b)の仮想写真14dを、論理計測ポイント71の写真座標を抽出するために2値化処理した画像データを示す図である。
【0044】
この例では、計測対象物モデル61に向かって右前方の斜め方向からの仮想撮影であるため、得られる写真は図11(b)のように円形凸部の右側は外周輪郭部が際立っているが、前面の左側外周輪郭部が本体前面と同化し、判別しにくくなっている。
そのため、図11(c)のように、輪郭を抽出する際にエッジが消失してしまうことがある。
このような場合は、論理計測ポイントである円形凸部の前面中心座標の算出に必要な外周輪郭部の座標が得られないため、精度良く円形凸部前面の中心座標、すなわち論理計測ポイントの仮想写真座標を得ることができない。
【0045】
そこで本実施の形態では、論理計測ポイントの周辺の輪郭を鮮明に撮影できるよう、前述の各仮計測ポイント7近傍の形状を解析して得た情報と各撮影位置の関係から、仮想照明位置を算出する。
例えば、図11(a)では、計測対象物モデル61に向かって右前方を仮想写真撮影位置に設定しており、かつ、仮計測ポイント7は円形凸部前面のほぼ中心位置であることより、円形凸部の外周輪郭部を際立たせるためには、仮想写真撮影位置・方向41aに仮想ストロボを設置し、更に仮想補助照明51aを仮計測ポイント7を挟んで仮想写真撮影位置・方向41aの逆側、すなわち計測対象物モデル61の左側に位置するよう配置すべき事が算出される。
なお、この機能は、制御ソフト2の仮想照明設定機能が担当する。
【0046】
図12(a)〜(c)に示すように、仮想写真撮影位置・方向41aからのカメラストロボに加え、左側にも仮想補助照明51aを設けることにより、円形凸部の両側の外周輪郭部が鮮明に撮影できることが分かる。
これにより、正確に論理計測ポイント71となる円形凸部前面の中心座標を計算できる。
【0047】
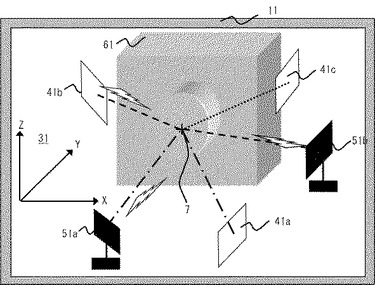
図13は、仮想補助照明の配置のバリエーションを示す図である。
先に説明した図12の例では、仮想補助照明は一つであったが、複数の仮想補助照明が同期する構成でもよい。例えば、図13において、仮想写真撮影位置・方向41aで撮影する場合、仮想補助照明51aが対応し、その他の仮想補助照明はOFFとなってもよい。また、他の例として、仮想写真撮影位置・方向41bで撮影する場合、複数の仮想補助照明51a,51bが仮計測ポイント7を照射する組み合わせでもよい。
【0048】
ステップS8では、ステップS4、ステップS51で設定した仮想写真撮影位置・方向、仮想補助照明位置等を、精度の保証された実際の写真計測時の、照明位置、照明の向き、カメラの位置およびカメラの方向として、論理計測ポイント71の仮想3次元座標又はそれぞれの仮想写真における論理計測ポイント71の写真座標、及びその抽出処理方法とともに、実撮影指示書として表示画面11に表示又は印刷出力する。
【0049】
本実施の形態に係る写真計測システムおよび写真計測用写真撮影条件決定方法によれば、実施の形態1の効果に加えて、予め、高精度の期待できる撮影場所、方向、照明等の撮影条件を特定でき、写真計測を効率よく実施できる。
【0050】
実施の形態3.
以下、この発明の実施の形態3を、実施の形態1と異なる部分を中心に図を用いて説明する。
図14は、本発明の実施の形態3に係る写真計測システムによる写真計測の作業手順を示すフローチャートである。
図14に示すフローチャートと、実施の形態2で利用した図10に示すフローチャートとの違いは、ステップS7での計測精度の判定がNOであった場合の戻り先をステップS51の照明の再設定としている点である。
ステップS51では、照明の位置や明るさをのみを変更して再度ステップS6の写真計測シミュレーションを実施する。
【0051】
本実施の形態に係る写真計測システムおよび写真計測用写真撮影条件決定方法によれば、照明位置を変更するだけで所望の計測精度を確保できる場合が多く、写真計測シミュレーション及び実際の写真計測を効率よく実施できる。
【0052】
なお、本発明は、その発明の範囲内において、実施の形態を自由に組み合わせたり、各実施の形態を適宜、変形、省略することが可能である。
【符号の説明】
【0053】
100,200 写真計測システム、1 コンピュータ、11 表示画面、
2 制御ソフト、21 表示・指示部、22 演算部、3 3次元座標空間、
31 3DCAD空間、4a 実写真撮影位置・方向、5a 補助照明、
6 計測対象物、7 仮計測ポイント、12a〜12z 点、
14a〜14d 仮想写真、16a 実写真、71 論理計測ポイント、
72 実計測ポイント、41a,41b 仮想写真撮影位置・方向、
51a 仮想補助照明、61 計測対象物モデル。
【特許請求の範囲】
【請求項1】
計測対象物のデジタル写真撮影を行い、その写真に計測ポイントを設定して解析することにより前記計測対象物の前記計測ポイントの3次元座標を解析する写真計測システムにおいて、
前記計測対象物の設計データを読み込み、仮想の3次元の計測対象物モデルを生成する3Dモデリング機能と、
前記計測対象物モデルに対して、仮想写真計測を所望する位置を仮に仮計測ポイントとして指定する仮計測ポイント指定機能と、
前記仮計測ポイントに対する仮想写真の撮影位置・方向を指定して前記仮想写真を撮影する仮想写真撮影機能と、
前記仮想写真の前記仮計測ポイントの周囲の形状を解析することにより、前記仮計測ポイント近傍の自動抽出可能な位置としての論理計測ポイントを、前記仮想写真から自動抽出する論理計測ポイント抽出処理方法を選定する論理計測ポイント抽出処理方法選定機能と、
異なる位置から撮影された複数の前記仮想写真から、前記論理計測ポイント抽出処理方法を用いて自動抽出された同一の前記論理計測ポイントの、それぞれの前記仮想写真上における仮想写真座標を取得する仮想写真座標取得機能と、
前記仮想写真座標取得機能で取得した複数の前記仮想写真座標と、それぞれの前記仮想写真の仮想撮影をした位置、方向から、前記論理計測ポイントの仮想3次元空間座標を算出する3次元空間座標算出機能と、
前記計測対象物の設計データから直接求めた前記論理計測ポイントとなるべきポイントの仮想3次元空間座標と、3次元空間座標算出機能により求めた前記論理計測ポイントの仮想3次元空間座標との誤差を算出する仮想計測誤差算出機能とを有する制御ソフトを備えたコンピュータを備えた写真計測システム。
【請求項2】
前記制御ソフトは、前記仮想写真を濃淡によって2値化する画像処理機能を有する請求項1に記載の写真計測システム。
【請求項3】
前記制御ソフトは、前記論理計測ポイント抽出処理方法として、前記仮計測ポイントから外側に向けて同心円状に2値化されたデータの境界をサーチするサーチ機能を有する請求項2に記載の写真計測システム。
【請求項4】
前記制御ソフトは、前記論理計測ポイント抽出処理方法として、前記仮計測ポイントから所定の距離だけ離れた位置から、前記仮計測ポイントに向けて同心円状に2値化されたデータの境界をサーチするサーチ機能を有する請求項2に記載の写真計測システム。
【請求項5】
前記制御ソフトは、前記仮計測ポイントの周囲を照射する仮想照明の設定条件を算出する仮想照明設定機能を有する請求項1乃至請求項4のいずれか1項に記載の写真計測システム。
【請求項6】
前記制御ソフトは、前記論理計測ポイントが抽出できなかった場合に、前記仮想照明設定機能により、前記仮想照明の設定条件を変更して処理をリトライする請求項5に記載の写真計測システム。
【請求項7】
前記制御ソフトは、前記誤差が予め設定した所定の計測精度以下の場合は、
複数の前記仮想写真の撮影を行った仮想写真撮影位置・方向と、
前記論理計測ポイントの仮想3次元空間座標又はそれぞれの前記仮想写真における前記論理計測ポイントの写真座標と、
前記論理計測ポイントの抽出処理方法とを、実撮影指示書として出力する請求項1乃至請求項4のいずれか1項に記載の写真計測システム。
【請求項8】
前記制御ソフトは、前記誤差が予め設定した所定の計測精度以下の場合は、
複数の前記仮想写真の撮影を行った仮想写真撮影位置・方向及び仮想照明の設定条件と、
前記論理計測ポイントの仮想3次元空間座標又はそれぞれの前記仮想写真における前記論理計測ポイントの写真座標と、
前記論理計測ポイントの抽出処理方法とを、実撮影指示書として出力する請求項5又は請求項6のいずれか1項に記載の写真計測システム。
【請求項9】
前記仮想照明の前記設定条件は、前記仮想照明の位置、方向である請求項5又は請求項6又は請求項8に記載の写真計測システム。
【請求項10】
前記仮想照明の条件には、前記仮想照明の光量を含む請求項9に記載の写真計測システム。
【請求項11】
計測対象物のデジタル写真撮影を行うための写真計測用写真撮影条件決定方法であって、
前記計測対象物の設計データを読み込み、仮想の3次元の計測対象物モデルを生成するステップと、
前記計測対象物モデルに対して、仮想写真計測を所望する位置を仮に仮計測ポイントとして指定するステップと、
実写真計測時に必要とする計測精度を設定するステップと、
前記仮計測ポイントに対する仮想写真の撮影位置・方向を指定して仮想写真を撮影するステップと、
前記仮計測ポイントの周囲の形状を解析することにより、前記仮想写真から自動抽出可能な位置としての論理計測ポイント抽出処理方法を選定して前記論理計測ポイントを取得するステップと、
異なる位置から撮影された複数の前記仮想写真から、自動抽出された同一の前記論理計測ポイントの、それぞれの前記仮想写真上における仮想写真座標を取得するステップと、
前記仮想写真座標取得機能で取得した複数の前記仮想写真座標と及びそれぞれの仮想写真の仮想撮影をした位置、方向から、前記論理計測ポイントの仮想3次元空間座標を算出するステップと、
前記計測対象物の設計データから直接求めた前記論理計測ポイントとなるべきポイントの仮想3次元空間座標と、前記仮想写真から求めた前記論理計測ポイントの仮想3次元空間座標との誤差を算出するステップとからなる写真計測用写真撮影条件決定方法。
【請求項1】
計測対象物のデジタル写真撮影を行い、その写真に計測ポイントを設定して解析することにより前記計測対象物の前記計測ポイントの3次元座標を解析する写真計測システムにおいて、
前記計測対象物の設計データを読み込み、仮想の3次元の計測対象物モデルを生成する3Dモデリング機能と、
前記計測対象物モデルに対して、仮想写真計測を所望する位置を仮に仮計測ポイントとして指定する仮計測ポイント指定機能と、
前記仮計測ポイントに対する仮想写真の撮影位置・方向を指定して前記仮想写真を撮影する仮想写真撮影機能と、
前記仮想写真の前記仮計測ポイントの周囲の形状を解析することにより、前記仮計測ポイント近傍の自動抽出可能な位置としての論理計測ポイントを、前記仮想写真から自動抽出する論理計測ポイント抽出処理方法を選定する論理計測ポイント抽出処理方法選定機能と、
異なる位置から撮影された複数の前記仮想写真から、前記論理計測ポイント抽出処理方法を用いて自動抽出された同一の前記論理計測ポイントの、それぞれの前記仮想写真上における仮想写真座標を取得する仮想写真座標取得機能と、
前記仮想写真座標取得機能で取得した複数の前記仮想写真座標と、それぞれの前記仮想写真の仮想撮影をした位置、方向から、前記論理計測ポイントの仮想3次元空間座標を算出する3次元空間座標算出機能と、
前記計測対象物の設計データから直接求めた前記論理計測ポイントとなるべきポイントの仮想3次元空間座標と、3次元空間座標算出機能により求めた前記論理計測ポイントの仮想3次元空間座標との誤差を算出する仮想計測誤差算出機能とを有する制御ソフトを備えたコンピュータを備えた写真計測システム。
【請求項2】
前記制御ソフトは、前記仮想写真を濃淡によって2値化する画像処理機能を有する請求項1に記載の写真計測システム。
【請求項3】
前記制御ソフトは、前記論理計測ポイント抽出処理方法として、前記仮計測ポイントから外側に向けて同心円状に2値化されたデータの境界をサーチするサーチ機能を有する請求項2に記載の写真計測システム。
【請求項4】
前記制御ソフトは、前記論理計測ポイント抽出処理方法として、前記仮計測ポイントから所定の距離だけ離れた位置から、前記仮計測ポイントに向けて同心円状に2値化されたデータの境界をサーチするサーチ機能を有する請求項2に記載の写真計測システム。
【請求項5】
前記制御ソフトは、前記仮計測ポイントの周囲を照射する仮想照明の設定条件を算出する仮想照明設定機能を有する請求項1乃至請求項4のいずれか1項に記載の写真計測システム。
【請求項6】
前記制御ソフトは、前記論理計測ポイントが抽出できなかった場合に、前記仮想照明設定機能により、前記仮想照明の設定条件を変更して処理をリトライする請求項5に記載の写真計測システム。
【請求項7】
前記制御ソフトは、前記誤差が予め設定した所定の計測精度以下の場合は、
複数の前記仮想写真の撮影を行った仮想写真撮影位置・方向と、
前記論理計測ポイントの仮想3次元空間座標又はそれぞれの前記仮想写真における前記論理計測ポイントの写真座標と、
前記論理計測ポイントの抽出処理方法とを、実撮影指示書として出力する請求項1乃至請求項4のいずれか1項に記載の写真計測システム。
【請求項8】
前記制御ソフトは、前記誤差が予め設定した所定の計測精度以下の場合は、
複数の前記仮想写真の撮影を行った仮想写真撮影位置・方向及び仮想照明の設定条件と、
前記論理計測ポイントの仮想3次元空間座標又はそれぞれの前記仮想写真における前記論理計測ポイントの写真座標と、
前記論理計測ポイントの抽出処理方法とを、実撮影指示書として出力する請求項5又は請求項6のいずれか1項に記載の写真計測システム。
【請求項9】
前記仮想照明の前記設定条件は、前記仮想照明の位置、方向である請求項5又は請求項6又は請求項8に記載の写真計測システム。
【請求項10】
前記仮想照明の条件には、前記仮想照明の光量を含む請求項9に記載の写真計測システム。
【請求項11】
計測対象物のデジタル写真撮影を行うための写真計測用写真撮影条件決定方法であって、
前記計測対象物の設計データを読み込み、仮想の3次元の計測対象物モデルを生成するステップと、
前記計測対象物モデルに対して、仮想写真計測を所望する位置を仮に仮計測ポイントとして指定するステップと、
実写真計測時に必要とする計測精度を設定するステップと、
前記仮計測ポイントに対する仮想写真の撮影位置・方向を指定して仮想写真を撮影するステップと、
前記仮計測ポイントの周囲の形状を解析することにより、前記仮想写真から自動抽出可能な位置としての論理計測ポイント抽出処理方法を選定して前記論理計測ポイントを取得するステップと、
異なる位置から撮影された複数の前記仮想写真から、自動抽出された同一の前記論理計測ポイントの、それぞれの前記仮想写真上における仮想写真座標を取得するステップと、
前記仮想写真座標取得機能で取得した複数の前記仮想写真座標と及びそれぞれの仮想写真の仮想撮影をした位置、方向から、前記論理計測ポイントの仮想3次元空間座標を算出するステップと、
前記計測対象物の設計データから直接求めた前記論理計測ポイントとなるべきポイントの仮想3次元空間座標と、前記仮想写真から求めた前記論理計測ポイントの仮想3次元空間座標との誤差を算出するステップとからなる写真計測用写真撮影条件決定方法。
【図1】


【図2】
【図3】
【図4】

【図5】
【図6】

【図7】
【図8】

【図9】
【図10】
【図11】
【図12】
【図13】
【図14】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2013−64618(P2013−64618A)
【公開日】平成25年4月11日(2013.4.11)
【国際特許分類】
【出願番号】特願2011−202491(P2011−202491)
【出願日】平成23年9月16日(2011.9.16)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成25年4月11日(2013.4.11)
【国際特許分類】
【出願日】平成23年9月16日(2011.9.16)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]