
冷陰極電子銃の自動入射軸合わせ方法
【課題】本発明は冷陰極電子銃の自動入射軸合わせ方法に関し、電子ビームのアノード電極A2に対する入射軸を自動で最適化することができる冷陰極電子銃の自動入射軸合わせ方法を提供することを目的としている。
【解決手段】集束レンズ群と、対物レンズ群と、中間レンズ群と、投影レンズ群と、1個以上の対物絞りを備え、電子銃の第1のアノード電極A1及び第2のアノード電極A2に電界を印加することによってエミッタから電子ビームを発生させる冷陰極電子銃を備え、該電子銃のアノード電極A2に対する機械的位置を調整するためのモータを備えた透過型電子顕微鏡において、前記モータを駆動して電子銃を機械的に走査させ、環状のアノード電極A2の開口に対する電子ビームの入射軸を調整し、アノード電極A2の開口を通過する電流量が最大となる時の前記電子銃の最適な機械的位置を自動的に取得するように構成する。
【解決手段】集束レンズ群と、対物レンズ群と、中間レンズ群と、投影レンズ群と、1個以上の対物絞りを備え、電子銃の第1のアノード電極A1及び第2のアノード電極A2に電界を印加することによってエミッタから電子ビームを発生させる冷陰極電子銃を備え、該電子銃のアノード電極A2に対する機械的位置を調整するためのモータを備えた透過型電子顕微鏡において、前記モータを駆動して電子銃を機械的に走査させ、環状のアノード電極A2の開口に対する電子ビームの入射軸を調整し、アノード電極A2の開口を通過する電流量が最大となる時の前記電子銃の最適な機械的位置を自動的に取得するように構成する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は冷陰極電子銃の自動入射軸合わせ方法に関し、更に詳しくは電子ビームがアノード電極の中心を通るように自動入射軸合わせを行なうことができる冷陰極電子銃の自動入射軸合わせ方法に関する。冷陰極電子銃の軸合わせは、通常エミッタ交換後、電子銃焼き出し後、エミッタのビルドアップ後に行なうが、作業には熟練が必要である。冷陰極電子銃のエミッタのビルドアップを頻繁に行なう場合、その都度、電子ビームのアノード電極A2に対する入射軸合わせが必要不可欠であるため、入射軸合わせの自動化が望まれている。
【背景技術】
【0002】
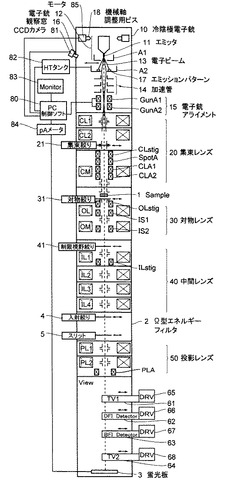
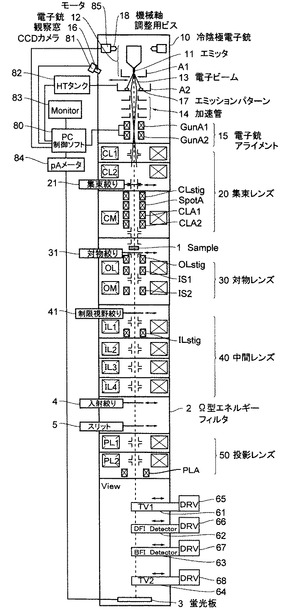
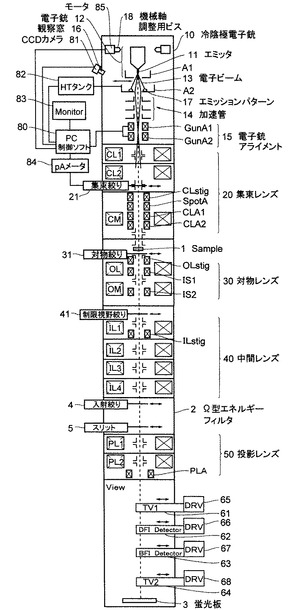
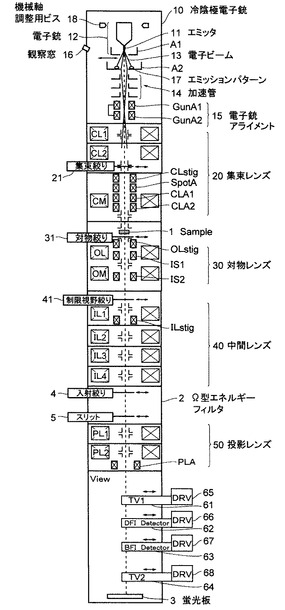
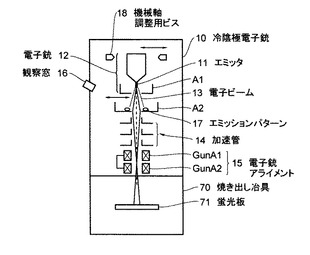
図7は冷陰極電子銃を搭載した透過型電子顕微鏡の構成図である。ここで、冷陰極電子銃とは、第1のアノードA1と第2のアノードA2に印加される電界の作用によりエミッタから電子を引き出すようにした電子銃のことである。図において、10は電子ビームを放射する冷陰極電子銃、20は電子ビームを集束する集束レンズ、1は該集束レンズ20の下部に配置されたサンプル(試料)、30は試料の透過電子ビーム像を拡大する対物レンズ、40は該対物レンズ30を通過して電子ビームを集束させる中間レンズ、2は中間レンズ40を通過した電子ビームを受けるΩ型エネルギーフィルタ、50は該エネルギーフィルタ2を通過した電子ビームを受ける投影レンズである。
【0003】
3は投影レンズ50を通過した電子ビームを受けて画像化する蛍光板である。61は透過電子ビームを電気信号に変換するCCD素子を具備するテレビカメラ、62はDFIディテクタ、63はBFIディテクタ、64は透過電子ビームを電気信号に変換するCCD素子を具備するテレビカメラ、65はテレビカメラ61を駆動するドライバ、66はDFIディテクタ62を駆動するドライバ、67はBFIディテクタ63を駆動するドライバ、68はテレビカメラ64を駆動するドライバである。
【0004】
冷陰極電子銃10において、11は電子を放出するエミッタ、A1は第1のアノード電極、A2は第2のアノード電極である。エミッタ11,第1のアノード電極A1とで電子銃12を構成する。13は電子ビーム、14は該電子ビーム13を加速する加速管、15は該加速管14の下部に配置される電子銃アライメントである。16は電子ビーム13が第2のアノード電極に照射された時のエミッションパターン17を観察する観察窓である。18は電子銃部分の機械的位置を調整するためのビスである。
【0005】
集束レンズ20において、CL1,CL2は集束用のレンズ、21は集束絞りである。対物レンズ30において、OLは対物用のレンズ、31は対物絞りである。中間レンズ40において、41は制限視野絞りである。4はΩ型エネルギーフィルタ2の上に配置された入射絞りである。5は該入射絞り4の下段に設けられたスリットである。
【0006】
アノード電極A1及びA2に印加された引き出し電圧により、エミッタ11から放射された電子ビーム13は、アノード電極A1及びA2,加速管14,電子銃アライメント15を通り、透過型電子顕微鏡のカラムへ導入される。この時、エミッタ11の先端より放射された電子ビーム13は環状のアノード電極A2の真ん中に設けられた開口を通過するが、エミッタ11の先端以外から放射された電子ビーム13は、アノード電極A2に衝突し、その電流はエミッション電流として計測される。
【0007】
冷陰極電子銃12から放射された電子ビーム13は、集束レンズ20,集束絞り21を通過した後に試料1へ照射される。試料を透過した透過電子ビーム13’は、対物レンズ30,対物絞り31,制限視野絞り41,中間レンズ40,投影レンズ50を通過した後に蛍光板3に投影され、試料1の拡大像が得られる。
【0008】
冷陰極電子銃を透過型電子顕微鏡のカラムに搭載する前の準備として、冷陰極電子銃を焼き出し治具70に搭載し、電子ビームのアノード電極A2に対する入射軸合わせを行なう。従来の手法においては、図8に示すように、機械軸調整用ビス18を用いて電子銃の水平位置を調整することで、電子ビーム13のアノード電極A2に対する入射軸合わせを行なう。
【0009】
その後、加速電圧50kVを印加し、電子ビーム出しを行ない、焼き出し治具70内部の蛍光板71まで電子ビーム13を投下させた後、電子銃アライメント15を利用して蛍光板71の中心に対する電子ビーム13の入射軸合わせを行ない、電子ビーム13が円形となるのを観察窓16で確認する。電子ビーム13のアノード電極A2に対する入射軸合わせが十分であるか否かを判断するには、第1に冷陰極電子銃の側面の観察窓16でエミッションパターン17を観察し、エミッタ11の先端から放射された電子ビーム13がアノード電極A2の真ん中の開口を通過しているかどうかを判断する。第2に電子銃アライメント15の偏向量が最大偏向量の半分程度であることを確認する。
【0010】
従来のこの種の装置としては、フィラメント13が取り付けられた内枠11をX方向にパルスモータ17で駆動し、所定のパルス数毎にその時の電流値をメモリに記憶し、所定位置まで移動させた時の電流値の最大の位置を測定し、同様の動作をY方向にも繰り返し、その時の電流値の最大の位置を測定し、X,Y方向の最大の位置を最適フィラメント位置とする装置が知られている(例えば特許文献1参照)。
【0011】
また、電子線をアライメントがとれている確率が最大の位置である原点から周辺に向けて円形状或いは矩形状にベクトルスキャンし、ビーム電流が最大となる位置を見い出すようにした装置が知られている(例えば特許文献2参照)。
【先行技術文献】
【特許文献】
【0012】
【特許文献1】特許第2650508号公報(段落0007〜0012、図1〜図3)
【特許文献2】特開平8−45454号公報(段落0018〜0024、図1)
【発明の概要】
【発明が解決しようとする課題】
【0013】
電子ビームのアノード電極A2に対する入射軸がずれている場合には、エミッタ先端より放出された輝度の高い電子ビームが環状のアノード電極A2に捕らえられ、試料に到達する輝度の高い電子ビームの電流量が少なくなり、冷陰極電子銃の特徴が活かせなくなる。従って、電子ビームのアノード電極A2に対する入射軸合わせが必要不可欠であるが、従来の冷陰極電子銃における、電子ビームのアノード電極A2に対する入射軸合わせ方法においては、さまざまな欠点が存在する。
【0014】
第1に、入射軸合わせの際、電子ビームを発生させない状態で電子銃の機械軸を調整するため、電子ビームのアノード電極A2に対する入射軸が最適であるかどうかを同時に確認することができない。一度、加速電圧を印加して電子ビームを放射させてから入射軸の状態を確認するため、機械軸の調整、入射軸の確認を繰り返さなければならない。このため、莫大な作業時間が必要となる。
【0015】
第2に、電子銃の機械軸調整を手動で行なうため、冷陰極電子銃を透過型電子顕微鏡本体に搭載した後には、高所作業となり作業員の落下等の危険を伴うため、電子ビームのアノード電極A2に対する入射軸の調整ができない。また、エミッタのビルドアップを行なうと、電子ビームのアノード電極A2に対する入射軸が最適な状態からずれることがあり、入射軸調整が必須となるが、冷陰極電子銃が透過型電子顕微鏡本体に搭載された後においては、従来の手法が利用できないことが問題である。
【0016】
本発明はこのような課題に鑑みてなされたものであって、電子ビームのアノード電極A2に対する入射軸を自動で最適化することができる冷陰極電子銃の自動入射軸合わせ方法を提供することを目的としている。
【課題を解決するための手段】
【0017】
(1)請求項1記載の発明は、1個以上のレンズで構成される集束レンズ群と、1個以上のレンズで構成される対物レンズ群と、1個以上のレンズで構成される中間レンズ群と、1個以上のレンズで構成される投影レンズ群と、1個以上の対物絞りを備え、電子銃の第1のアノード電極A1及び第2のアノード電極A2に電界を印加することによってエミッタから電子ビームを発生させる冷陰極電子銃を備え、該電子銃のアノード電極A2に対する機械的位置を調整するためのモータを備えた透過型電子顕微鏡において、前記モータを駆動して電子銃を機械的に走査させ、環状のアノード電極A2の開口に対する電子ビームの入射軸を調整し、アノード電極A2の開口を通過する電流量が最大となる時の前記電子銃の最適な機械的位置を自動的に取得することを特徴とする。
【0018】
(2)請求項2記載の発明は、電子銃のエミッタから放射された電子が前記第2のアノード電極A2に照射された時のスポットを第1スポット、エミッタ以外の部分から放射された電子が前記第2のアノード電極A2に照射された時のスポットを第2スポットとし、電子銃をモータ駆動により走査させながら、それぞれの第1スポットの座標(Xn,Yn)毎に、第2のアノード電極A2に流れる電流IA2(Xn,Yn)を測定してメモリに記憶し、(Xn,Yn)毎に電子銃アライメントを走査させて電子銃アライメントコイルのデータ毎に蛍光板で検出される電流IS(Xn,Yn)を測定してメモリに記憶し、一通り電子銃を走査させた後、アノード電極A2で検出した電流IA2(Xn,Yn)の最大値IA2maxと、蛍光板で検出した電流IS(Xn,Yn)の最大値ISmaxを取得し、Its=C1・ISmaxで定義される蛍光板で検出した電流の閾値と、ItA2=C2・IA2maxで定義されるアノード電極A2で検出した電流の閾値に対して、
Is≧Its=C1・ISmaxかつIA2<ItA2=C2・IA2maxが満たされる時、第1スポットが最適な位置(Xopt,Yopt)にあると判定することを特徴とする。
【0019】
(3)請求項3記載の発明は、前記電流IS(Xn,Yn)を蛍光板の代わりに集束絞りで検出することを特徴とする。
【発明の効果】
【0020】
(1)請求項1記載の発明によれば、モータを駆動して電子銃を機械的に走査させ、環状のアノード電極A2の開口に対する電子ビームの入射軸を調整し、アノード電極A2の開口を通過する電流量が最大となる時の前記電子銃の最適な機械的位置を自動的に取得することができるので、電子ビームのアノード電極A2に対する入射軸を自動で最適化することができる。
【0021】
(2)請求項2記載の発明によれば、電子銃のエミッタからアノード電極A2に放出された電子のスポットのうち、第1スポットが最適な位置にあると判定することができるための条件を決めることができる。
【0022】
(3)請求項3記載の発明によれば、電子銃のエミッタからアノード電極A2に放出された電子のスポットのうち、第1スポットが最適な位置にあると判定することができるための条件を決めることができる。
【図面の簡単な説明】
【0023】
【図1】焼き出し治具上に冷陰極電子銃が搭載された場合における電子ビームのアノード電極A2に対する入射軸合わせの説明図である。
【図2】エミッションパターンとアノード電極A2の関係を示す図である。
【図3】自動入射軸合わせ処理のフローチャートである。
【図4】透過型電子顕微鏡本体上に冷陰極電子銃が搭載された場合で、蛍光板を利用した電子ビームのアノード電極A2に対する入射軸合わせの説明図である。
【図5】IA2とISの関係を示す図である。
【図6】透過型電子顕微鏡本体上に冷陰極電子銃が搭載された場合で、集束絞りを利用した電子ビームのアノード電極A2に対する入射軸合わせの説明図である。
【図7】冷陰極電子銃を搭載した透過型電子顕微鏡の構成図である。
【図8】従来の方法による電子ビームのアノード電極A2に対する入射軸合わせの説明図である。
【発明を実施するための形態】
【0024】
以下、図面を参照して本発明の実施の形態について、詳細に説明する。
(実施例1)
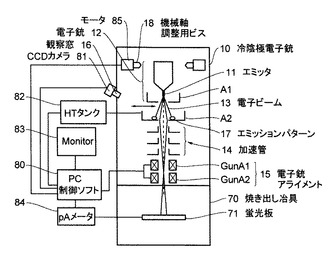
焼き出し治具上で電子ビームのアノード電極A2に対する入射軸合わせを行なう時の構成について説明する。図1は焼き出し治具上に冷陰極電子銃が搭載された場合における電子ビームのアノード電極A2に対する入射軸合わせの模式図である。図8と同一のものは、同一の符号を付して示す。図において、85は電子銃を水平方向に移動させるモータ、81は観察窓16からエミッションパターン17を撮影するCCDカメラ、82はアノード電極A2に印加する高圧を発生するHTタンク、80は本発明を制御するための制御ソフトウェァを具備するパソコン(PC)、83はエミッションパターンを表示するモニタ、84は蛍光板71に流れる電流を測定するpAメータである。
【0025】
図1に示すように、モータ85に取り付けられた機械軸調整用ビス18によって、エミッタ11と第1のアノード電極A1から構成される電子銃12が第2のアノード電極A2や加速管14や電子銃アライメント15に対して水平方向に移動できるようになっている。エミッタ11より放射された電子ビーム13の一部はアノード電極A2に衝突し、その電流は高圧タンク82を介してエミッション電流として計測される。
【0026】
アノード電極A2には蛍光塗料が塗布してあり、エミッションパターン17が観察窓16より観察できる。焼き出し治具70の内部には蛍光板71が据え付けてあり、蛍光板71まで到達した電子ビーム13の電流量がpAメータ84で計測され、パソコン80に記憶される。機械軸調整用ビス18が取り付けられたモータ85、電子銃アライメント15はパソコン80に接続されており、パソコンから制御可能となっている。
【0027】
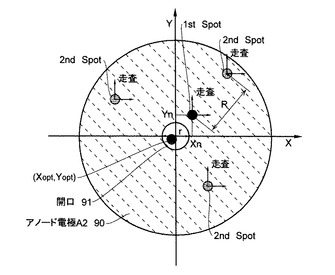
次に、実施例1の動作について説明する。図2はエミッションパターンとアノード電極A2の関係を示す図である。図において、90はアノード電極A2である。91は該アノード電極A2の中央に形成された電子ビームを通過させるための開口である。エミッションパターンはエミッタ11の結晶方位に依存するが、第1スポットの周りに3つの第2スポットが観察されるエミッタの場合を例にとって説明する。
【0028】
第1スポットはエミッタ先端より放出された電子ビームに対応し、第2スポットはエミッタ11の先端以外から放出された電子ビームに対応するものとする。第1スポットと第2スポットの間の距離Rはビルドアップの条件により変化する。アノード電極A2の開口(半径r)の中心に対する第1スポットの座標を(Xn,Yn)とする。第1スポットの位置(Xn,Yn)はX方向及びY方向のモータ85のギア部分に取り付けられた可変抵抗に印加される電圧(VXn,VYn)に1対1に対応する。電子ビーム13のアノード電極A2に対する入射軸が最適である時の第1スポットの位置を(XOpt,YOpt)と定義する。
【0029】
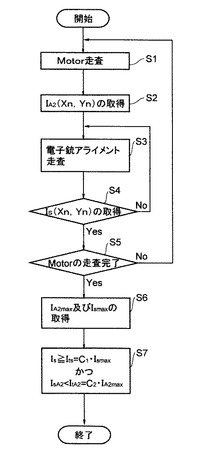
図3は自動入射軸合わせ処理のフローチャートである。以下、このフローチャートを参照しつつ実施例1の動作を説明する。
図4は透過型電子顕微鏡本体上に冷陰極電子銃が搭載された場合で、蛍光板を利用した電子ビームのアノード電極A2に対する入射軸合わせの模式図である。以下、この模式図と図3のフローチャートを参照しつつ、実施例1を説明する。
[準備:電子銃アライメントによる電子ビーム投下]
1)アノード電極A1及びA2に電界を印加することで、エミッタ11より電子ビーム13を放出させる。
【0030】
2)エミッションパターン観察窓16に接続されたCCDカメラ81を利用して、図2に示すようなエミッションパターン17が観察されることを確認する。
3)エミッタ11の先端から最も電子ビームの放出が行なわれるような条件を利用してエミッタ11のビルドアップを行なう。
【0031】
4)次に、パソコン80にインストールされた制御ソフトにより、電子銃アライメント15を走査させ、電子銃アライメントコイルのデータ毎に蛍光板3で検出される電流量の測定を行ない、検出される電流量が最大となる電子銃アライメント15の値を取得する。ここで、電子銃アライメント15の値を検出される電流量が最大となる値に設定する。
[電子銃の走査による電子ビームのアノード電極A2に対する自動入射軸合わせ]
この自動入射軸合わせ方法を適用するにあたり、エミッションパターンの第1スポットの強度即ち電流量が第2スポットのそれよりも大きいエミッション条件をエミッタのビルドアップにより達成していることが前提となる。即ち、第1スポットの電流量I1と第2スポット1個の電流量I2との間にI1>I2の関係が成り立つ場合を前提とする。
【0032】
5)制御ソフトによりモータ85を駆動させ、エミッタ11とアノード電極A1から構成される電子銃部分をアノード電極A2に対して走査させる(S1)。電子銃12を走査させることにより、図2に示したエミッションパターンの第1及び第2スポットがアノード電極A2に対して平行移動する。電子銃の水平方向の可変ステップは制御ソフトにより設定することができる。
【0033】
6)第1スポットの位置が(Xn,Yn)の時、アノード電極A2で検出した電流IA2(Xn,Yn)を取得し(S2)、メモリに保存する。ここで、メモリは例えばパソコン80内に設けられている。
【0034】
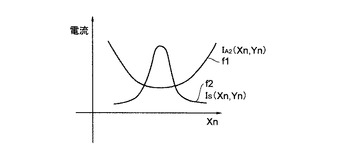
7)制御ソフトにより電子銃アライメントを走査させ(S3)、電子銃アライメントコイルのデータ毎に蛍光板3で検出される電流の測定を行ない、検出される電流量が最大となる電子銃アライメントの値を取得する。電子銃アライメントを走査させた時に、蛍光板3で検出される電流の最大値をIS(Xn,Yn)とし(S4)、電子銃アライメントのデータはIS(Xn,Yn)を得た時の値に設定する。図5はIA2とISの関係を示す図である。横軸はXn,Y軸は電流である。f1はIA2の特性を、f2はISの特性をそれぞれ示す。
【0035】
8)電子銃12をモータ85の駆動により走査させながら(S5)、各々の第1スポットの座標(Xn,Yn)毎に、アノード電極A2で検出した電流IA2(Xn,Yn)を取得し、メモリに保存する。更に、(Xn,Yn)毎に手順7)の作業を行ない、電子銃アライメント15を走査させた時の蛍光板3で検出した最大電流IS(Xn,Yn)を取得し、メモリに保存する。
【0036】
9)一通り電子銃を走査させた後、アノード電極A2で検出した電流IA2(Xn,Yn)の最大値IA2maxを取得する。また、蛍光板3で検出した電流IS(Xn,Yn)の最大値ISmaxを取得する(S6)。
【0037】
10)電子銃12の位置が最適な位置(Xopt,Yopt)にある時、蛍光板3で検出される電流は最大値近傍の値となり、かつ第1スポットより放射された電子ビームのみがアノード電極A2の開口91を投下する。
【0038】
11)ここで、エミッションパターンの第1スポットの電流量が第2スポットのそれよりも大きいという前提を用いると、電子銃12の位置が最適な位置(Xopt,Yopt)は、蛍光板で検出した電流ISが最大値の近傍であり、かつアノード電極A2で検出された電流IA2が最大ではないという条件により特定される。
【0039】
12)即ち、Its=C1・Ismaxで定義される蛍光板3で検出した電流の閾値と、
ItA2=C2・IA2maxで定義されるアノード電極A2で検出した電流の閾値に対して、
IS≧Its=C1・IsmaxかつIA2<ItA2=C2・IA2maxが満たされる時、第1スポットが最適な位置(Xopt,Yopt)に存在することを意味する(S7)。
【0040】
つまり、電子銃の最適な水平位置が探し出せたことになる。ここで、C1及びC2は0〜1.0まで可変できる任意定数であり制御ソフトで設定する。C1はできるだけ1.0に近い値を使用した方が、高い精度で最適な電子銃位置を特定することができる。
【0041】
13)実際には、手順5)〜12)までの操作を制御ソフトで制御し、手順12)を満たす最適な電子銃の位置(Xopt,Yopt)を自動的に見つけ出した後、電子銃12の位置を最適位置に設定する。
【0042】
この実施例によれば、モータを駆動して電子銃を機械的に走査させ、環状のアノード電極A2の開口に対する電子ビームの入射軸を調整し、アノード電極A2の開口を通過する電流量が最大となる時の前記電子銃の最適な機械的位置を自動的に取得することができるので、電子ビームのアノード電極A2に対する入射軸を自動で最適化することができる。
(実施例2)
透過型電子顕微鏡本体上に冷陰極電子銃が搭載されている場合に、電子ビームのアノード電極A2に対する入射軸合わせを行なう場合について説明する。図4に示すように、モータ85に取り付けられた機械軸調整用ビス18によって、エミッタ11とアノード電極A1から構成される電子銃12がアノード電極A2や加速管14や電子銃アライメント15に対して水平方向に移動できるようになっている。
【0043】
エミッタ11より放射された電子ビーム13の一部はアノード電極A2に衝突し、その電流はHTタンク82を介してエミッション電流として計測される。アノード電極A2には蛍光塗料が塗布してあり、エミッションパターン17が観察窓16から観察できる。冷陰極電子銃を投下した電子ビーム13は、集束レンズ20,対物レンズ30,中間レンズ40,投影レンズ50を通過し、透過型電子顕微鏡の最下部に位置する蛍光板3まで到達する。
【0044】
蛍光板3まで到達した電子ビームの電流量はpAメータ84で計測され、パソコン80に記録される。機械軸調整用ビス18が取り付けられたモータ85,電子銃アライメント15はパソコン80に接続されており、パソコン80からの制御が可能となっている。このように構成された装置の動作を説明すれば、以下の通りである。
【0045】
図2にエミッションパターンとアノード電極A2の関係を示す。エミッションパターンは、エミッタ11の結晶方位に依存するが、第1スポットの周りに3つの第2スポットが観察されるエミッタ11の場合を例にあげて動作説明を行なう。第1スポットはエミッタ先端より放出された電子ビームに対応し、第2スポットはエミッタの先端以外から放出された電子ビームに対応するものとする。
【0046】
第1スポットと第2スポットの間の距離Rは、ビルドアップの条件により変化する。アノード電極A2の開口91(半径r)の中心に対する第1スポットの座標を(Xn,Yn)とする。第1スポットの位置(Xn,Yn)は、X方向及びY方向のモータのギア部分に取り付けられた可変抵抗に印加される電圧(VXn,VYn)に1対1に対応する。電子ビームのアノード電極A2に対する入射軸が最適である時の第1スポットの位置を
(Xopt,Yopt)と定義する。基本となる手順を図3のフローチャートに示した。
[準備:電子銃アライメントによる電子ビーム投下]
1)アノード電極A1及びA2に電界を印加することで、エミッタ11より電子ビーム13を放出させる。エミッションパターン観察窓に接続されたCCDカメラ81を利用して図2に示すようなエミッションパターンが観察されることを確認する。
【0047】
2)エミッタ11の先端から最も電子ビームの放出が行なわれるような条件を利用してエミッタ11のビルドアップを行なう。
3)電子ビーム13から試料1を外し、蛍光板3に電子ビームが集束されるような集束レンズ20のの励磁にする。全ての絞り、スリットをオープンにする。対物レンズ30,中間レンズ40,投影レンズ50の励磁は固定しておく。
【0048】
4)次に、パソコン80にインストールされた制御ソフトにより、電子銃アライメント15を走査させ、電子銃アライメントコイルのデータ毎に蛍光板3で検出される電流量の測定を行ない、検出される電流量が最大となる電子銃アライメント15の値を取得する。ここで、電子銃アライメント15の値を検出される電流量が最大となる値に設定する。
[電子銃の走査による電子ビームのアノード電極A2に対する自動入射軸合わせ]
この自動入射軸合わせ方法を適用するにあたり、エミッションパターンの第1スポットの強度即ち電流量が第2スポットのそれよりも大きいエミッション条件をエミッタのビルドアップにより達成していることが前提となる。即ち、第1スポットの電流量I1と第2スポット1個の電流量I2との間にI1>I2の関係が成り立つ場合を前提とする。
【0049】
5)制御ソフトによりモータ85を駆動させ、エミッタ11とアノード電極A1から構成される電子銃部分をアノード電極A2に対して走査させる(S1)。電子銃12を走査させることにより、図2に示したエミッションパターンの第1及び第2スポットがアノード電極A2に対して平行移動する。電子銃の水平方向の可変ステップは制御ソフトにより設定することができる。
【0050】
6)第1スポットの位置が(Xn,Yn)の時、アノード電極A2で検出した電流IA2(Xn,Yn)を取得し(S2)、メモリに保存する。ここで、メモリはパソコン80内に設けられている。
【0051】
7)制御ソフトにより電子銃アライメントを走査させ(S3)、電子銃アライメントコイルのデータ毎に蛍光板3で検出される電流の測定を行ない、検出される電流量が最大となる電子銃アライメントの値を取得する。電子銃アライメントを走査させた時に、蛍光板3で検出される電流の最大値をIS(Xn,Yn)とし(S4)、電子銃アライメントのデータはIS(Xn,Yn)を得た時の値に設定する。
【0052】
8)電子銃12をモータ85の駆動により走査させながら(S5)、各々の第1スポットの座標(Xn,Yn)毎に、アノード電極A2で検出した電流IA2(Xn,Yn)を取得し、メモリに保存する。更に、(Xn,Yn)毎に手順7)の作業を行ない、電子銃アライメント15を走査させた時の蛍光板3で検出した最大電流IS(Xn,Yn)を取得し、メモリに保存する。
【0053】
9)一通り電子銃を走査させた後、アノード電極A2で検出した電流IA2(Xn,Yn)の最大値IA2maxを取得する。また、蛍光板3で検出した電流IS(Xn,Yn)の最大値ISmaxを取得する(S6)。
【0054】
10)電子銃12の位置が最適な位置(Xopt,Yopt)にある時、蛍光板3で検出される電流は最大値近傍の値となり、かつ第1スポットより放射された電子ビームのみがアノード電極A2の開口91を投下する。
【0055】
11)ここで、エミッションパターンの第1スポットの電流量が第2スポットのそれよりも大きいという前提を用いると、電子銃12の位置が最適な位置(Xopt,Yopt)は、蛍光板で検出した電流ISが最大値の近傍であり、かつアノード電極A2で検出された電流IA2が最大ではないという条件により特定される。
【0056】
12)即ち、Its=C1・Ismaxで定義される蛍光板3で検出した電流の閾値と、
ItA2=C2・IA2maxで定義されるアノード電極A2で検出した電流の閾値に対して、
IS≧Its=C1・IsmaxかつIA2<ItA2=C2・IA2maxが満たされる時、第1スポットが最適な位置(Xopt,Yopt)に存在することを意味する(S7)。
【0057】
つまり、電子銃の最適な水平位置が探し出せたことになる。ここで、C1及びC2は0〜1.0まで可変できる任意定数であり制御ソフトで設定する。C1はできるだけ1.0に近い値を使用した方が、高い精度で最適な電子銃位置を特定することができる。
【0058】
13)実際には、手順5)〜12)までの操作を制御ソフトで制御し、手順12)を満たす最適な電子銃の位置(Xopt,Yopt)を自動的に見つけ出した後、電子銃12の位置を最適位置に設定する。
【0059】
この実施例によれば、モータを駆動して電子銃を機械的に走査させ、環状のアノード電極A2の開口に対する電子ビームの入射軸を調整し、アノード電極A2の開口を通過する電流量が最大となる時の前記電子銃の最適な機械的位置を自動的に取得することができるので、電子ビームのアノード電極A2に対する入射軸を自動で最適化することができる。
(実施例3)
透過型電子顕微鏡本体上に冷陰極電子銃が搭載されている場合に、電子ビームのアノード電極A2に対する入射軸合わせを行なう時の構成について説明する。図6は透過型電子顕微鏡本体上に冷陰極電子銃が搭載された場合で、集束絞りを利用した電子ビームのアノード電極A2に対する入射軸合わせの模式図である。図4と同一のものは、同一の符号を付して示す。
【0060】
モータ85に取り付けられた機械軸調整用ビス18によって、エミッタとアノード電極A1から構成される電子銃12がアノード電極A2や加速管14や電子銃アライメント15に対して水平方向に移動できるようになっている。エミッタ11より放射された電子ビームの一部はアノード電極A2に衝突し、その電流はHTタンク82を介してエミッション電流として計測される。
【0061】
電極A2には蛍光塗料が塗布してあり、エミッションパターンが観察窓16より観察できる。冷陰極電子銃を投下した電子ビーム13は、集束レンズ20を通過し、集束絞り21まで到達する。集束絞り21に衝突した電子ビームの電流量は、pAメータ84で計測され、パソコン80に記録される。機械軸調整用ビス18が取り付けられたモータ85,電子銃アライメント15はパソコン80に接続されており、パソコンから制御可能となっている。このように構成された装置の動作を説明すれば、以下の通りである。
【0062】
図2にエミッションパターンとアノード電極A2の関係を示す。エミッションパターンは、エミッタ11の結晶方位に依存するが、第1スポットの周りに3つの第2スポットが観察されるエミッタ11の場合を例にあげて動作説明を行なう。第1スポットはエミッタ先端より放出された電子ビームに対応し、第2スポットはエミッタの先端以外から放出された電子ビームに対応するものとする。
【0063】
第1スポットと第2スポットの間の距離Rは、ビルドアップの条件により変化する。アノード電極A2の開口91(半径r)の中心に対する第1スポットの座標を(Xn,Yn)とする。第1スポットの位置(Xn,Yn)は、X方向及びY方向のモータのギア部分に取り付けられた可変抵抗に印加される電圧(VXn,VYn)に1対1に対応する。電子ビームのアノード電極A2に対する入射軸が最適である時の第1スポットの位置を
(Xopt,Yopt)と定義する。基本となる手順を図3のフローチャートに示した。
[準備:電子銃アライメントによる電子ビーム投下]
1)アノード電極A1及びA2に電界を印加することで、エミッタ11より電子ビーム13を放出させる。エミッションパターン観察窓に接続されたCCDカメラ81を利用して図2に示すようなエミッションパターンが観察されることを確認する。
【0064】
2)エミッタ11の先端から最も電子ビームの放出が行なわれるような条件を利用してエミッタ11のビルドアップを行なう。
3)集束絞り21に電子ビーム13が集束されるような集束レンズ20の励磁及び集束絞りの位置にする。
【0065】
4)次に、パソコン80にインストールされた制御ソフトにより、電子銃アライメント15を走査させ、電子銃アライメントコイルのデータ毎に集束絞り21で検出される電流量の測定を行ない、検出される電流量が最大となる電子銃アライメント15の値を取得する。電子銃アライメント15の値を検出される電流量が最大となる値に設定する。
[電子銃の走査による電子ビームのアノード電極A2に対する自動入射軸合わせ]
この自動入射軸合わせ方法を適用するにあたり、エミッションパターンの第1スポットの強度即ち電流量が第2スポットのそれよりも大きいエミッション条件をエミッタのビルドアップにより達成していることが前提となる。即ち、第1スポットの電流量I1と第2スポット1個の電流量I2との間にI1>I2の関係が成り立つ場合を前提とする。
【0066】
5)制御ソフトによりモータ85を駆動させ、エミッタ11とアノード電極A1から構成される電子銃12をアノード電極A2に対して走査させる(S1)。電子銃12を走査させることにより、図2に示したエミッションパターンの第1及び第2スポットがアノード電極A2に対して平行移動する。電子銃の水平方向の可変ステップは制御ソフトにより設定することができる。
【0067】
6)第1スポットの位置が(Xn,Yn)の時、アノード電極A2で検出した電流IA2(Xn,Yn)を取得し(S2)、メモリに保存する。ここで、メモリはパソコン80内に設けられている。
【0068】
7)制御ソフトにより電子銃アライメントを走査させ(S3)、電子銃アライメントコイルのデータ毎に集束絞り21で検出される電流の測定を行ない、検出される電流量が最大となる電子銃アライメントの値を取得する。電子銃アライメント15を走査させた時に、集束絞り21で検出される電流の最大値をIS(Xn,Yn)とし(S4)、電子銃アライメントのデータはIS(Xn,Yn)を得た時の値に設定する。
【0069】
8)電子銃12をモータ85の駆動により走査させながら(S5)、各々の第1スポットの座標(Xn,Yn)毎に、アノード電極A2で検出した電流IA2(Xn,Yn)を取得し、メモリに保存する。更に、(Xn,Yn)毎に手順7)の作業を行ない、電子銃アライメント15を走査させた時の集束絞り21で検出した最大電流IS(Xn,Yn)を取得し、メモリに保存する。
【0070】
9)一通り電子銃を走査させた後、アノード電極A2で検出した電流IA2(Xn,Yn)の最大値IA2maxを取得する。また、集束絞り21で検出した電流IS(Xn,Yn)の最大値ISmaxを取得する(S6)。
【0071】
10)電子銃12の位置が最適な位置(Xopt,Yopt)にある時、集束絞り21で検出される電流は最大値近傍の値となり、かつ第1スポットより放射された電子ビームのみがアノード電極A2の開口91を投下する。
【0072】
11)ここで、エミッションパターンの第1スポットの電流量が第2スポットのそれよりも大きいという前提を用いると、電子銃12の位置が最適な位置(Xopt,Yopt)は、集束絞り21で検出した電流ISが最大値の近傍であり、かつアノード電極A2で検出された電流IA2が最大ではないという条件により特定される。
【0073】
12)即ち、Its=C1・Ismaxで定義される集束絞り21で検出した電流の閾値と、
ItA2=C2・IA2maxで定義されるアノード電極A2で検出した電流の閾値に対して、
IS≧Its=C1・IsmaxかつIA2<ItA2=C2・IA2maxが満たされる時、第1スポットが最適な位置(Xopt,Yopt)に存在することを意味する(S7)。
【0074】
つまり、電子銃の最適な水平位置が探し出せたことになる。ここで、C1及びC2は0〜1.0まで可変できる任意定数であり制御ソフトで設定する。C1はできるだけ1.0に近い値を使用した方が、高い精度で最適な電子銃位置を特定することができる。
【0075】
13)実際には、手順5)〜12)までの操作を制御ソフトで制御し、手順12)を満たす最適な電子銃の位置(Xopt,Yopt)を自動的に見つけ出した後、電子銃12の位置を最適位置に設定する。
【0076】
この実施例によれば、モータを駆動して電子銃を機械的に走査させ、環状のアノード電極A2の開口に対する電子ビームの入射軸を調整し、アノード電極A2の開口を通過する電流量が最大となる時の前記電子銃の最適な機械的位置を自動的に取得することができるので、電子ビームのアノード電極A2に対する入射軸を自動で最適化することができる。
【0077】
以上詳細に説明したとおり、本発明によれば電子ビームのアノード電極A2に対する入射軸の自動調整方法の発明によって、電子ビームのアノード電極A2に対する入射軸合わせが容易になり、軸合わせに必要な時間が短くなる。また、エミッタ先端より放出された輝度の高い電子ビームが常にアノード電極A2の内部を通過することで、アノード電極A1に印加する引き出し電圧を下げても試料に到達する電流を維持できるようになる。引き出し電圧を下げると、電子ビームのエネルギー幅の低減化につながり、電子エネルギー損失分光法による分析を効果的に行なうことができるようになる。
【符号の説明】
【0078】
1 試料
2 Ω型エネルギーフィルタ
3 蛍光板
4 入射絞り
5 スリット
10 冷陰極電子銃
11 エミッタ
12 電子銃
13 電子ビーム
14 加速管
15 電子銃アライメント
16 観察用窓
17 エミッションパターン
18 機械軸調整用ビス
20 集束レンズ
21 集束絞り
30 対物レンズ
31 対物絞り
40 中間レンズ
41 制限視野絞り
50 投影レンズ
61 テレビカメラ
62 DFI検出器
63 BFI検出器
64 テレビカメラ
65 ドライバ
66 ドライバ
67 ドライバ
68 ドライバ
80 パソコン
81 CCDカメラ
82 HTタンク
83 モニタ
84 pAメータ
【技術分野】
【0001】
本発明は冷陰極電子銃の自動入射軸合わせ方法に関し、更に詳しくは電子ビームがアノード電極の中心を通るように自動入射軸合わせを行なうことができる冷陰極電子銃の自動入射軸合わせ方法に関する。冷陰極電子銃の軸合わせは、通常エミッタ交換後、電子銃焼き出し後、エミッタのビルドアップ後に行なうが、作業には熟練が必要である。冷陰極電子銃のエミッタのビルドアップを頻繁に行なう場合、その都度、電子ビームのアノード電極A2に対する入射軸合わせが必要不可欠であるため、入射軸合わせの自動化が望まれている。
【背景技術】
【0002】
図7は冷陰極電子銃を搭載した透過型電子顕微鏡の構成図である。ここで、冷陰極電子銃とは、第1のアノードA1と第2のアノードA2に印加される電界の作用によりエミッタから電子を引き出すようにした電子銃のことである。図において、10は電子ビームを放射する冷陰極電子銃、20は電子ビームを集束する集束レンズ、1は該集束レンズ20の下部に配置されたサンプル(試料)、30は試料の透過電子ビーム像を拡大する対物レンズ、40は該対物レンズ30を通過して電子ビームを集束させる中間レンズ、2は中間レンズ40を通過した電子ビームを受けるΩ型エネルギーフィルタ、50は該エネルギーフィルタ2を通過した電子ビームを受ける投影レンズである。
【0003】
3は投影レンズ50を通過した電子ビームを受けて画像化する蛍光板である。61は透過電子ビームを電気信号に変換するCCD素子を具備するテレビカメラ、62はDFIディテクタ、63はBFIディテクタ、64は透過電子ビームを電気信号に変換するCCD素子を具備するテレビカメラ、65はテレビカメラ61を駆動するドライバ、66はDFIディテクタ62を駆動するドライバ、67はBFIディテクタ63を駆動するドライバ、68はテレビカメラ64を駆動するドライバである。
【0004】
冷陰極電子銃10において、11は電子を放出するエミッタ、A1は第1のアノード電極、A2は第2のアノード電極である。エミッタ11,第1のアノード電極A1とで電子銃12を構成する。13は電子ビーム、14は該電子ビーム13を加速する加速管、15は該加速管14の下部に配置される電子銃アライメントである。16は電子ビーム13が第2のアノード電極に照射された時のエミッションパターン17を観察する観察窓である。18は電子銃部分の機械的位置を調整するためのビスである。
【0005】
集束レンズ20において、CL1,CL2は集束用のレンズ、21は集束絞りである。対物レンズ30において、OLは対物用のレンズ、31は対物絞りである。中間レンズ40において、41は制限視野絞りである。4はΩ型エネルギーフィルタ2の上に配置された入射絞りである。5は該入射絞り4の下段に設けられたスリットである。
【0006】
アノード電極A1及びA2に印加された引き出し電圧により、エミッタ11から放射された電子ビーム13は、アノード電極A1及びA2,加速管14,電子銃アライメント15を通り、透過型電子顕微鏡のカラムへ導入される。この時、エミッタ11の先端より放射された電子ビーム13は環状のアノード電極A2の真ん中に設けられた開口を通過するが、エミッタ11の先端以外から放射された電子ビーム13は、アノード電極A2に衝突し、その電流はエミッション電流として計測される。
【0007】
冷陰極電子銃12から放射された電子ビーム13は、集束レンズ20,集束絞り21を通過した後に試料1へ照射される。試料を透過した透過電子ビーム13’は、対物レンズ30,対物絞り31,制限視野絞り41,中間レンズ40,投影レンズ50を通過した後に蛍光板3に投影され、試料1の拡大像が得られる。
【0008】
冷陰極電子銃を透過型電子顕微鏡のカラムに搭載する前の準備として、冷陰極電子銃を焼き出し治具70に搭載し、電子ビームのアノード電極A2に対する入射軸合わせを行なう。従来の手法においては、図8に示すように、機械軸調整用ビス18を用いて電子銃の水平位置を調整することで、電子ビーム13のアノード電極A2に対する入射軸合わせを行なう。
【0009】
その後、加速電圧50kVを印加し、電子ビーム出しを行ない、焼き出し治具70内部の蛍光板71まで電子ビーム13を投下させた後、電子銃アライメント15を利用して蛍光板71の中心に対する電子ビーム13の入射軸合わせを行ない、電子ビーム13が円形となるのを観察窓16で確認する。電子ビーム13のアノード電極A2に対する入射軸合わせが十分であるか否かを判断するには、第1に冷陰極電子銃の側面の観察窓16でエミッションパターン17を観察し、エミッタ11の先端から放射された電子ビーム13がアノード電極A2の真ん中の開口を通過しているかどうかを判断する。第2に電子銃アライメント15の偏向量が最大偏向量の半分程度であることを確認する。
【0010】
従来のこの種の装置としては、フィラメント13が取り付けられた内枠11をX方向にパルスモータ17で駆動し、所定のパルス数毎にその時の電流値をメモリに記憶し、所定位置まで移動させた時の電流値の最大の位置を測定し、同様の動作をY方向にも繰り返し、その時の電流値の最大の位置を測定し、X,Y方向の最大の位置を最適フィラメント位置とする装置が知られている(例えば特許文献1参照)。
【0011】
また、電子線をアライメントがとれている確率が最大の位置である原点から周辺に向けて円形状或いは矩形状にベクトルスキャンし、ビーム電流が最大となる位置を見い出すようにした装置が知られている(例えば特許文献2参照)。
【先行技術文献】
【特許文献】
【0012】
【特許文献1】特許第2650508号公報(段落0007〜0012、図1〜図3)
【特許文献2】特開平8−45454号公報(段落0018〜0024、図1)
【発明の概要】
【発明が解決しようとする課題】
【0013】
電子ビームのアノード電極A2に対する入射軸がずれている場合には、エミッタ先端より放出された輝度の高い電子ビームが環状のアノード電極A2に捕らえられ、試料に到達する輝度の高い電子ビームの電流量が少なくなり、冷陰極電子銃の特徴が活かせなくなる。従って、電子ビームのアノード電極A2に対する入射軸合わせが必要不可欠であるが、従来の冷陰極電子銃における、電子ビームのアノード電極A2に対する入射軸合わせ方法においては、さまざまな欠点が存在する。
【0014】
第1に、入射軸合わせの際、電子ビームを発生させない状態で電子銃の機械軸を調整するため、電子ビームのアノード電極A2に対する入射軸が最適であるかどうかを同時に確認することができない。一度、加速電圧を印加して電子ビームを放射させてから入射軸の状態を確認するため、機械軸の調整、入射軸の確認を繰り返さなければならない。このため、莫大な作業時間が必要となる。
【0015】
第2に、電子銃の機械軸調整を手動で行なうため、冷陰極電子銃を透過型電子顕微鏡本体に搭載した後には、高所作業となり作業員の落下等の危険を伴うため、電子ビームのアノード電極A2に対する入射軸の調整ができない。また、エミッタのビルドアップを行なうと、電子ビームのアノード電極A2に対する入射軸が最適な状態からずれることがあり、入射軸調整が必須となるが、冷陰極電子銃が透過型電子顕微鏡本体に搭載された後においては、従来の手法が利用できないことが問題である。
【0016】
本発明はこのような課題に鑑みてなされたものであって、電子ビームのアノード電極A2に対する入射軸を自動で最適化することができる冷陰極電子銃の自動入射軸合わせ方法を提供することを目的としている。
【課題を解決するための手段】
【0017】
(1)請求項1記載の発明は、1個以上のレンズで構成される集束レンズ群と、1個以上のレンズで構成される対物レンズ群と、1個以上のレンズで構成される中間レンズ群と、1個以上のレンズで構成される投影レンズ群と、1個以上の対物絞りを備え、電子銃の第1のアノード電極A1及び第2のアノード電極A2に電界を印加することによってエミッタから電子ビームを発生させる冷陰極電子銃を備え、該電子銃のアノード電極A2に対する機械的位置を調整するためのモータを備えた透過型電子顕微鏡において、前記モータを駆動して電子銃を機械的に走査させ、環状のアノード電極A2の開口に対する電子ビームの入射軸を調整し、アノード電極A2の開口を通過する電流量が最大となる時の前記電子銃の最適な機械的位置を自動的に取得することを特徴とする。
【0018】
(2)請求項2記載の発明は、電子銃のエミッタから放射された電子が前記第2のアノード電極A2に照射された時のスポットを第1スポット、エミッタ以外の部分から放射された電子が前記第2のアノード電極A2に照射された時のスポットを第2スポットとし、電子銃をモータ駆動により走査させながら、それぞれの第1スポットの座標(Xn,Yn)毎に、第2のアノード電極A2に流れる電流IA2(Xn,Yn)を測定してメモリに記憶し、(Xn,Yn)毎に電子銃アライメントを走査させて電子銃アライメントコイルのデータ毎に蛍光板で検出される電流IS(Xn,Yn)を測定してメモリに記憶し、一通り電子銃を走査させた後、アノード電極A2で検出した電流IA2(Xn,Yn)の最大値IA2maxと、蛍光板で検出した電流IS(Xn,Yn)の最大値ISmaxを取得し、Its=C1・ISmaxで定義される蛍光板で検出した電流の閾値と、ItA2=C2・IA2maxで定義されるアノード電極A2で検出した電流の閾値に対して、
Is≧Its=C1・ISmaxかつIA2<ItA2=C2・IA2maxが満たされる時、第1スポットが最適な位置(Xopt,Yopt)にあると判定することを特徴とする。
【0019】
(3)請求項3記載の発明は、前記電流IS(Xn,Yn)を蛍光板の代わりに集束絞りで検出することを特徴とする。
【発明の効果】
【0020】
(1)請求項1記載の発明によれば、モータを駆動して電子銃を機械的に走査させ、環状のアノード電極A2の開口に対する電子ビームの入射軸を調整し、アノード電極A2の開口を通過する電流量が最大となる時の前記電子銃の最適な機械的位置を自動的に取得することができるので、電子ビームのアノード電極A2に対する入射軸を自動で最適化することができる。
【0021】
(2)請求項2記載の発明によれば、電子銃のエミッタからアノード電極A2に放出された電子のスポットのうち、第1スポットが最適な位置にあると判定することができるための条件を決めることができる。
【0022】
(3)請求項3記載の発明によれば、電子銃のエミッタからアノード電極A2に放出された電子のスポットのうち、第1スポットが最適な位置にあると判定することができるための条件を決めることができる。
【図面の簡単な説明】
【0023】
【図1】焼き出し治具上に冷陰極電子銃が搭載された場合における電子ビームのアノード電極A2に対する入射軸合わせの説明図である。
【図2】エミッションパターンとアノード電極A2の関係を示す図である。
【図3】自動入射軸合わせ処理のフローチャートである。
【図4】透過型電子顕微鏡本体上に冷陰極電子銃が搭載された場合で、蛍光板を利用した電子ビームのアノード電極A2に対する入射軸合わせの説明図である。
【図5】IA2とISの関係を示す図である。
【図6】透過型電子顕微鏡本体上に冷陰極電子銃が搭載された場合で、集束絞りを利用した電子ビームのアノード電極A2に対する入射軸合わせの説明図である。
【図7】冷陰極電子銃を搭載した透過型電子顕微鏡の構成図である。
【図8】従来の方法による電子ビームのアノード電極A2に対する入射軸合わせの説明図である。
【発明を実施するための形態】
【0024】
以下、図面を参照して本発明の実施の形態について、詳細に説明する。
(実施例1)
焼き出し治具上で電子ビームのアノード電極A2に対する入射軸合わせを行なう時の構成について説明する。図1は焼き出し治具上に冷陰極電子銃が搭載された場合における電子ビームのアノード電極A2に対する入射軸合わせの模式図である。図8と同一のものは、同一の符号を付して示す。図において、85は電子銃を水平方向に移動させるモータ、81は観察窓16からエミッションパターン17を撮影するCCDカメラ、82はアノード電極A2に印加する高圧を発生するHTタンク、80は本発明を制御するための制御ソフトウェァを具備するパソコン(PC)、83はエミッションパターンを表示するモニタ、84は蛍光板71に流れる電流を測定するpAメータである。
【0025】
図1に示すように、モータ85に取り付けられた機械軸調整用ビス18によって、エミッタ11と第1のアノード電極A1から構成される電子銃12が第2のアノード電極A2や加速管14や電子銃アライメント15に対して水平方向に移動できるようになっている。エミッタ11より放射された電子ビーム13の一部はアノード電極A2に衝突し、その電流は高圧タンク82を介してエミッション電流として計測される。
【0026】
アノード電極A2には蛍光塗料が塗布してあり、エミッションパターン17が観察窓16より観察できる。焼き出し治具70の内部には蛍光板71が据え付けてあり、蛍光板71まで到達した電子ビーム13の電流量がpAメータ84で計測され、パソコン80に記憶される。機械軸調整用ビス18が取り付けられたモータ85、電子銃アライメント15はパソコン80に接続されており、パソコンから制御可能となっている。
【0027】
次に、実施例1の動作について説明する。図2はエミッションパターンとアノード電極A2の関係を示す図である。図において、90はアノード電極A2である。91は該アノード電極A2の中央に形成された電子ビームを通過させるための開口である。エミッションパターンはエミッタ11の結晶方位に依存するが、第1スポットの周りに3つの第2スポットが観察されるエミッタの場合を例にとって説明する。
【0028】
第1スポットはエミッタ先端より放出された電子ビームに対応し、第2スポットはエミッタ11の先端以外から放出された電子ビームに対応するものとする。第1スポットと第2スポットの間の距離Rはビルドアップの条件により変化する。アノード電極A2の開口(半径r)の中心に対する第1スポットの座標を(Xn,Yn)とする。第1スポットの位置(Xn,Yn)はX方向及びY方向のモータ85のギア部分に取り付けられた可変抵抗に印加される電圧(VXn,VYn)に1対1に対応する。電子ビーム13のアノード電極A2に対する入射軸が最適である時の第1スポットの位置を(XOpt,YOpt)と定義する。
【0029】
図3は自動入射軸合わせ処理のフローチャートである。以下、このフローチャートを参照しつつ実施例1の動作を説明する。
図4は透過型電子顕微鏡本体上に冷陰極電子銃が搭載された場合で、蛍光板を利用した電子ビームのアノード電極A2に対する入射軸合わせの模式図である。以下、この模式図と図3のフローチャートを参照しつつ、実施例1を説明する。
[準備:電子銃アライメントによる電子ビーム投下]
1)アノード電極A1及びA2に電界を印加することで、エミッタ11より電子ビーム13を放出させる。
【0030】
2)エミッションパターン観察窓16に接続されたCCDカメラ81を利用して、図2に示すようなエミッションパターン17が観察されることを確認する。
3)エミッタ11の先端から最も電子ビームの放出が行なわれるような条件を利用してエミッタ11のビルドアップを行なう。
【0031】
4)次に、パソコン80にインストールされた制御ソフトにより、電子銃アライメント15を走査させ、電子銃アライメントコイルのデータ毎に蛍光板3で検出される電流量の測定を行ない、検出される電流量が最大となる電子銃アライメント15の値を取得する。ここで、電子銃アライメント15の値を検出される電流量が最大となる値に設定する。
[電子銃の走査による電子ビームのアノード電極A2に対する自動入射軸合わせ]
この自動入射軸合わせ方法を適用するにあたり、エミッションパターンの第1スポットの強度即ち電流量が第2スポットのそれよりも大きいエミッション条件をエミッタのビルドアップにより達成していることが前提となる。即ち、第1スポットの電流量I1と第2スポット1個の電流量I2との間にI1>I2の関係が成り立つ場合を前提とする。
【0032】
5)制御ソフトによりモータ85を駆動させ、エミッタ11とアノード電極A1から構成される電子銃部分をアノード電極A2に対して走査させる(S1)。電子銃12を走査させることにより、図2に示したエミッションパターンの第1及び第2スポットがアノード電極A2に対して平行移動する。電子銃の水平方向の可変ステップは制御ソフトにより設定することができる。
【0033】
6)第1スポットの位置が(Xn,Yn)の時、アノード電極A2で検出した電流IA2(Xn,Yn)を取得し(S2)、メモリに保存する。ここで、メモリは例えばパソコン80内に設けられている。
【0034】
7)制御ソフトにより電子銃アライメントを走査させ(S3)、電子銃アライメントコイルのデータ毎に蛍光板3で検出される電流の測定を行ない、検出される電流量が最大となる電子銃アライメントの値を取得する。電子銃アライメントを走査させた時に、蛍光板3で検出される電流の最大値をIS(Xn,Yn)とし(S4)、電子銃アライメントのデータはIS(Xn,Yn)を得た時の値に設定する。図5はIA2とISの関係を示す図である。横軸はXn,Y軸は電流である。f1はIA2の特性を、f2はISの特性をそれぞれ示す。
【0035】
8)電子銃12をモータ85の駆動により走査させながら(S5)、各々の第1スポットの座標(Xn,Yn)毎に、アノード電極A2で検出した電流IA2(Xn,Yn)を取得し、メモリに保存する。更に、(Xn,Yn)毎に手順7)の作業を行ない、電子銃アライメント15を走査させた時の蛍光板3で検出した最大電流IS(Xn,Yn)を取得し、メモリに保存する。
【0036】
9)一通り電子銃を走査させた後、アノード電極A2で検出した電流IA2(Xn,Yn)の最大値IA2maxを取得する。また、蛍光板3で検出した電流IS(Xn,Yn)の最大値ISmaxを取得する(S6)。
【0037】
10)電子銃12の位置が最適な位置(Xopt,Yopt)にある時、蛍光板3で検出される電流は最大値近傍の値となり、かつ第1スポットより放射された電子ビームのみがアノード電極A2の開口91を投下する。
【0038】
11)ここで、エミッションパターンの第1スポットの電流量が第2スポットのそれよりも大きいという前提を用いると、電子銃12の位置が最適な位置(Xopt,Yopt)は、蛍光板で検出した電流ISが最大値の近傍であり、かつアノード電極A2で検出された電流IA2が最大ではないという条件により特定される。
【0039】
12)即ち、Its=C1・Ismaxで定義される蛍光板3で検出した電流の閾値と、
ItA2=C2・IA2maxで定義されるアノード電極A2で検出した電流の閾値に対して、
IS≧Its=C1・IsmaxかつIA2<ItA2=C2・IA2maxが満たされる時、第1スポットが最適な位置(Xopt,Yopt)に存在することを意味する(S7)。
【0040】
つまり、電子銃の最適な水平位置が探し出せたことになる。ここで、C1及びC2は0〜1.0まで可変できる任意定数であり制御ソフトで設定する。C1はできるだけ1.0に近い値を使用した方が、高い精度で最適な電子銃位置を特定することができる。
【0041】
13)実際には、手順5)〜12)までの操作を制御ソフトで制御し、手順12)を満たす最適な電子銃の位置(Xopt,Yopt)を自動的に見つけ出した後、電子銃12の位置を最適位置に設定する。
【0042】
この実施例によれば、モータを駆動して電子銃を機械的に走査させ、環状のアノード電極A2の開口に対する電子ビームの入射軸を調整し、アノード電極A2の開口を通過する電流量が最大となる時の前記電子銃の最適な機械的位置を自動的に取得することができるので、電子ビームのアノード電極A2に対する入射軸を自動で最適化することができる。
(実施例2)
透過型電子顕微鏡本体上に冷陰極電子銃が搭載されている場合に、電子ビームのアノード電極A2に対する入射軸合わせを行なう場合について説明する。図4に示すように、モータ85に取り付けられた機械軸調整用ビス18によって、エミッタ11とアノード電極A1から構成される電子銃12がアノード電極A2や加速管14や電子銃アライメント15に対して水平方向に移動できるようになっている。
【0043】
エミッタ11より放射された電子ビーム13の一部はアノード電極A2に衝突し、その電流はHTタンク82を介してエミッション電流として計測される。アノード電極A2には蛍光塗料が塗布してあり、エミッションパターン17が観察窓16から観察できる。冷陰極電子銃を投下した電子ビーム13は、集束レンズ20,対物レンズ30,中間レンズ40,投影レンズ50を通過し、透過型電子顕微鏡の最下部に位置する蛍光板3まで到達する。
【0044】
蛍光板3まで到達した電子ビームの電流量はpAメータ84で計測され、パソコン80に記録される。機械軸調整用ビス18が取り付けられたモータ85,電子銃アライメント15はパソコン80に接続されており、パソコン80からの制御が可能となっている。このように構成された装置の動作を説明すれば、以下の通りである。
【0045】
図2にエミッションパターンとアノード電極A2の関係を示す。エミッションパターンは、エミッタ11の結晶方位に依存するが、第1スポットの周りに3つの第2スポットが観察されるエミッタ11の場合を例にあげて動作説明を行なう。第1スポットはエミッタ先端より放出された電子ビームに対応し、第2スポットはエミッタの先端以外から放出された電子ビームに対応するものとする。
【0046】
第1スポットと第2スポットの間の距離Rは、ビルドアップの条件により変化する。アノード電極A2の開口91(半径r)の中心に対する第1スポットの座標を(Xn,Yn)とする。第1スポットの位置(Xn,Yn)は、X方向及びY方向のモータのギア部分に取り付けられた可変抵抗に印加される電圧(VXn,VYn)に1対1に対応する。電子ビームのアノード電極A2に対する入射軸が最適である時の第1スポットの位置を
(Xopt,Yopt)と定義する。基本となる手順を図3のフローチャートに示した。
[準備:電子銃アライメントによる電子ビーム投下]
1)アノード電極A1及びA2に電界を印加することで、エミッタ11より電子ビーム13を放出させる。エミッションパターン観察窓に接続されたCCDカメラ81を利用して図2に示すようなエミッションパターンが観察されることを確認する。
【0047】
2)エミッタ11の先端から最も電子ビームの放出が行なわれるような条件を利用してエミッタ11のビルドアップを行なう。
3)電子ビーム13から試料1を外し、蛍光板3に電子ビームが集束されるような集束レンズ20のの励磁にする。全ての絞り、スリットをオープンにする。対物レンズ30,中間レンズ40,投影レンズ50の励磁は固定しておく。
【0048】
4)次に、パソコン80にインストールされた制御ソフトにより、電子銃アライメント15を走査させ、電子銃アライメントコイルのデータ毎に蛍光板3で検出される電流量の測定を行ない、検出される電流量が最大となる電子銃アライメント15の値を取得する。ここで、電子銃アライメント15の値を検出される電流量が最大となる値に設定する。
[電子銃の走査による電子ビームのアノード電極A2に対する自動入射軸合わせ]
この自動入射軸合わせ方法を適用するにあたり、エミッションパターンの第1スポットの強度即ち電流量が第2スポットのそれよりも大きいエミッション条件をエミッタのビルドアップにより達成していることが前提となる。即ち、第1スポットの電流量I1と第2スポット1個の電流量I2との間にI1>I2の関係が成り立つ場合を前提とする。
【0049】
5)制御ソフトによりモータ85を駆動させ、エミッタ11とアノード電極A1から構成される電子銃部分をアノード電極A2に対して走査させる(S1)。電子銃12を走査させることにより、図2に示したエミッションパターンの第1及び第2スポットがアノード電極A2に対して平行移動する。電子銃の水平方向の可変ステップは制御ソフトにより設定することができる。
【0050】
6)第1スポットの位置が(Xn,Yn)の時、アノード電極A2で検出した電流IA2(Xn,Yn)を取得し(S2)、メモリに保存する。ここで、メモリはパソコン80内に設けられている。
【0051】
7)制御ソフトにより電子銃アライメントを走査させ(S3)、電子銃アライメントコイルのデータ毎に蛍光板3で検出される電流の測定を行ない、検出される電流量が最大となる電子銃アライメントの値を取得する。電子銃アライメントを走査させた時に、蛍光板3で検出される電流の最大値をIS(Xn,Yn)とし(S4)、電子銃アライメントのデータはIS(Xn,Yn)を得た時の値に設定する。
【0052】
8)電子銃12をモータ85の駆動により走査させながら(S5)、各々の第1スポットの座標(Xn,Yn)毎に、アノード電極A2で検出した電流IA2(Xn,Yn)を取得し、メモリに保存する。更に、(Xn,Yn)毎に手順7)の作業を行ない、電子銃アライメント15を走査させた時の蛍光板3で検出した最大電流IS(Xn,Yn)を取得し、メモリに保存する。
【0053】
9)一通り電子銃を走査させた後、アノード電極A2で検出した電流IA2(Xn,Yn)の最大値IA2maxを取得する。また、蛍光板3で検出した電流IS(Xn,Yn)の最大値ISmaxを取得する(S6)。
【0054】
10)電子銃12の位置が最適な位置(Xopt,Yopt)にある時、蛍光板3で検出される電流は最大値近傍の値となり、かつ第1スポットより放射された電子ビームのみがアノード電極A2の開口91を投下する。
【0055】
11)ここで、エミッションパターンの第1スポットの電流量が第2スポットのそれよりも大きいという前提を用いると、電子銃12の位置が最適な位置(Xopt,Yopt)は、蛍光板で検出した電流ISが最大値の近傍であり、かつアノード電極A2で検出された電流IA2が最大ではないという条件により特定される。
【0056】
12)即ち、Its=C1・Ismaxで定義される蛍光板3で検出した電流の閾値と、
ItA2=C2・IA2maxで定義されるアノード電極A2で検出した電流の閾値に対して、
IS≧Its=C1・IsmaxかつIA2<ItA2=C2・IA2maxが満たされる時、第1スポットが最適な位置(Xopt,Yopt)に存在することを意味する(S7)。
【0057】
つまり、電子銃の最適な水平位置が探し出せたことになる。ここで、C1及びC2は0〜1.0まで可変できる任意定数であり制御ソフトで設定する。C1はできるだけ1.0に近い値を使用した方が、高い精度で最適な電子銃位置を特定することができる。
【0058】
13)実際には、手順5)〜12)までの操作を制御ソフトで制御し、手順12)を満たす最適な電子銃の位置(Xopt,Yopt)を自動的に見つけ出した後、電子銃12の位置を最適位置に設定する。
【0059】
この実施例によれば、モータを駆動して電子銃を機械的に走査させ、環状のアノード電極A2の開口に対する電子ビームの入射軸を調整し、アノード電極A2の開口を通過する電流量が最大となる時の前記電子銃の最適な機械的位置を自動的に取得することができるので、電子ビームのアノード電極A2に対する入射軸を自動で最適化することができる。
(実施例3)
透過型電子顕微鏡本体上に冷陰極電子銃が搭載されている場合に、電子ビームのアノード電極A2に対する入射軸合わせを行なう時の構成について説明する。図6は透過型電子顕微鏡本体上に冷陰極電子銃が搭載された場合で、集束絞りを利用した電子ビームのアノード電極A2に対する入射軸合わせの模式図である。図4と同一のものは、同一の符号を付して示す。
【0060】
モータ85に取り付けられた機械軸調整用ビス18によって、エミッタとアノード電極A1から構成される電子銃12がアノード電極A2や加速管14や電子銃アライメント15に対して水平方向に移動できるようになっている。エミッタ11より放射された電子ビームの一部はアノード電極A2に衝突し、その電流はHTタンク82を介してエミッション電流として計測される。
【0061】
電極A2には蛍光塗料が塗布してあり、エミッションパターンが観察窓16より観察できる。冷陰極電子銃を投下した電子ビーム13は、集束レンズ20を通過し、集束絞り21まで到達する。集束絞り21に衝突した電子ビームの電流量は、pAメータ84で計測され、パソコン80に記録される。機械軸調整用ビス18が取り付けられたモータ85,電子銃アライメント15はパソコン80に接続されており、パソコンから制御可能となっている。このように構成された装置の動作を説明すれば、以下の通りである。
【0062】
図2にエミッションパターンとアノード電極A2の関係を示す。エミッションパターンは、エミッタ11の結晶方位に依存するが、第1スポットの周りに3つの第2スポットが観察されるエミッタ11の場合を例にあげて動作説明を行なう。第1スポットはエミッタ先端より放出された電子ビームに対応し、第2スポットはエミッタの先端以外から放出された電子ビームに対応するものとする。
【0063】
第1スポットと第2スポットの間の距離Rは、ビルドアップの条件により変化する。アノード電極A2の開口91(半径r)の中心に対する第1スポットの座標を(Xn,Yn)とする。第1スポットの位置(Xn,Yn)は、X方向及びY方向のモータのギア部分に取り付けられた可変抵抗に印加される電圧(VXn,VYn)に1対1に対応する。電子ビームのアノード電極A2に対する入射軸が最適である時の第1スポットの位置を
(Xopt,Yopt)と定義する。基本となる手順を図3のフローチャートに示した。
[準備:電子銃アライメントによる電子ビーム投下]
1)アノード電極A1及びA2に電界を印加することで、エミッタ11より電子ビーム13を放出させる。エミッションパターン観察窓に接続されたCCDカメラ81を利用して図2に示すようなエミッションパターンが観察されることを確認する。
【0064】
2)エミッタ11の先端から最も電子ビームの放出が行なわれるような条件を利用してエミッタ11のビルドアップを行なう。
3)集束絞り21に電子ビーム13が集束されるような集束レンズ20の励磁及び集束絞りの位置にする。
【0065】
4)次に、パソコン80にインストールされた制御ソフトにより、電子銃アライメント15を走査させ、電子銃アライメントコイルのデータ毎に集束絞り21で検出される電流量の測定を行ない、検出される電流量が最大となる電子銃アライメント15の値を取得する。電子銃アライメント15の値を検出される電流量が最大となる値に設定する。
[電子銃の走査による電子ビームのアノード電極A2に対する自動入射軸合わせ]
この自動入射軸合わせ方法を適用するにあたり、エミッションパターンの第1スポットの強度即ち電流量が第2スポットのそれよりも大きいエミッション条件をエミッタのビルドアップにより達成していることが前提となる。即ち、第1スポットの電流量I1と第2スポット1個の電流量I2との間にI1>I2の関係が成り立つ場合を前提とする。
【0066】
5)制御ソフトによりモータ85を駆動させ、エミッタ11とアノード電極A1から構成される電子銃12をアノード電極A2に対して走査させる(S1)。電子銃12を走査させることにより、図2に示したエミッションパターンの第1及び第2スポットがアノード電極A2に対して平行移動する。電子銃の水平方向の可変ステップは制御ソフトにより設定することができる。
【0067】
6)第1スポットの位置が(Xn,Yn)の時、アノード電極A2で検出した電流IA2(Xn,Yn)を取得し(S2)、メモリに保存する。ここで、メモリはパソコン80内に設けられている。
【0068】
7)制御ソフトにより電子銃アライメントを走査させ(S3)、電子銃アライメントコイルのデータ毎に集束絞り21で検出される電流の測定を行ない、検出される電流量が最大となる電子銃アライメントの値を取得する。電子銃アライメント15を走査させた時に、集束絞り21で検出される電流の最大値をIS(Xn,Yn)とし(S4)、電子銃アライメントのデータはIS(Xn,Yn)を得た時の値に設定する。
【0069】
8)電子銃12をモータ85の駆動により走査させながら(S5)、各々の第1スポットの座標(Xn,Yn)毎に、アノード電極A2で検出した電流IA2(Xn,Yn)を取得し、メモリに保存する。更に、(Xn,Yn)毎に手順7)の作業を行ない、電子銃アライメント15を走査させた時の集束絞り21で検出した最大電流IS(Xn,Yn)を取得し、メモリに保存する。
【0070】
9)一通り電子銃を走査させた後、アノード電極A2で検出した電流IA2(Xn,Yn)の最大値IA2maxを取得する。また、集束絞り21で検出した電流IS(Xn,Yn)の最大値ISmaxを取得する(S6)。
【0071】
10)電子銃12の位置が最適な位置(Xopt,Yopt)にある時、集束絞り21で検出される電流は最大値近傍の値となり、かつ第1スポットより放射された電子ビームのみがアノード電極A2の開口91を投下する。
【0072】
11)ここで、エミッションパターンの第1スポットの電流量が第2スポットのそれよりも大きいという前提を用いると、電子銃12の位置が最適な位置(Xopt,Yopt)は、集束絞り21で検出した電流ISが最大値の近傍であり、かつアノード電極A2で検出された電流IA2が最大ではないという条件により特定される。
【0073】
12)即ち、Its=C1・Ismaxで定義される集束絞り21で検出した電流の閾値と、
ItA2=C2・IA2maxで定義されるアノード電極A2で検出した電流の閾値に対して、
IS≧Its=C1・IsmaxかつIA2<ItA2=C2・IA2maxが満たされる時、第1スポットが最適な位置(Xopt,Yopt)に存在することを意味する(S7)。
【0074】
つまり、電子銃の最適な水平位置が探し出せたことになる。ここで、C1及びC2は0〜1.0まで可変できる任意定数であり制御ソフトで設定する。C1はできるだけ1.0に近い値を使用した方が、高い精度で最適な電子銃位置を特定することができる。
【0075】
13)実際には、手順5)〜12)までの操作を制御ソフトで制御し、手順12)を満たす最適な電子銃の位置(Xopt,Yopt)を自動的に見つけ出した後、電子銃12の位置を最適位置に設定する。
【0076】
この実施例によれば、モータを駆動して電子銃を機械的に走査させ、環状のアノード電極A2の開口に対する電子ビームの入射軸を調整し、アノード電極A2の開口を通過する電流量が最大となる時の前記電子銃の最適な機械的位置を自動的に取得することができるので、電子ビームのアノード電極A2に対する入射軸を自動で最適化することができる。
【0077】
以上詳細に説明したとおり、本発明によれば電子ビームのアノード電極A2に対する入射軸の自動調整方法の発明によって、電子ビームのアノード電極A2に対する入射軸合わせが容易になり、軸合わせに必要な時間が短くなる。また、エミッタ先端より放出された輝度の高い電子ビームが常にアノード電極A2の内部を通過することで、アノード電極A1に印加する引き出し電圧を下げても試料に到達する電流を維持できるようになる。引き出し電圧を下げると、電子ビームのエネルギー幅の低減化につながり、電子エネルギー損失分光法による分析を効果的に行なうことができるようになる。
【符号の説明】
【0078】
1 試料
2 Ω型エネルギーフィルタ
3 蛍光板
4 入射絞り
5 スリット
10 冷陰極電子銃
11 エミッタ
12 電子銃
13 電子ビーム
14 加速管
15 電子銃アライメント
16 観察用窓
17 エミッションパターン
18 機械軸調整用ビス
20 集束レンズ
21 集束絞り
30 対物レンズ
31 対物絞り
40 中間レンズ
41 制限視野絞り
50 投影レンズ
61 テレビカメラ
62 DFI検出器
63 BFI検出器
64 テレビカメラ
65 ドライバ
66 ドライバ
67 ドライバ
68 ドライバ
80 パソコン
81 CCDカメラ
82 HTタンク
83 モニタ
84 pAメータ
【特許請求の範囲】
【請求項1】
1個以上のレンズで構成される集束レンズ群と、1個以上のレンズで構成される対物レンズ群と、1個以上のレンズで構成される中間レンズ群と、1個以上のレンズで構成される投影レンズ群と、1個以上の対物絞りを備え、電子銃の第1のアノード電極A1及び第2のアノード電極A2に電界を印加することによってエミッタから電子ビームを発生させる冷陰極電子銃を備え、該電子銃のアノード電極A2に対する機械的位置を調整するためのモータを備えた透過型電子顕微鏡において、
前記モータを駆動して電子銃を機械的に走査させ、環状のアノード電極A2の開口に対する電子ビームの入射軸を調整し、アノード電極A2の開口を通過する電流量が最大となる時の前記電子銃の最適な機械的位置を自動的に取得することを特徴とする冷陰極電子銃の自動入射軸合わせ方法。
【請求項2】
電子銃のエミッタから放射された電子が前記第2のアノード電極A2に照射された時のスポットを第1スポット、エミッタ以外の部分から放射された電子が前記第2のアノード電極A2に照射された時のスポットを第2スポットとし、電子銃をモータ駆動により走査させながら、それぞれの第1スポットの座標(Xn,Yn)毎に、第2のアノード電極A2に流れる電流IA2(Xn,Yn)を測定してメモリに記憶し、(Xn,Yn)毎に電子銃アライメントを走査させて電子銃アライメントコイルのデータ毎に蛍光板で検出される電流IS(Xn,Yn)を測定してメモリに記憶し、
一通り電子銃を走査させた後、アノード電極A2で検出した電流IA2(Xn,Yn)の最大値IA2maxと、蛍光板で検出した電流IS(Xn,Yn)の最大値ISmaxを取得し、Its=C1・ISmaxで定義される蛍光板で検出した電流の閾値と、ItA2=C2・IA2maxで定義されるアノード電極A2で検出した電流の閾値に対して、
Is≧Its=C1・ISmaxかつIA2<ItA2=C2・IA2maxが満たされる時、第1スポットが最適な位置(Xopt,Yopt)にあると判定することを特徴とする請求項1記載の冷陰極電子銃の自動入射軸合わせ方法。
【請求項3】
前記電流IS(Xn,Yn)を蛍光板の代わりに集束絞りで検出することを特徴とする請求項2記載の冷陰極電子銃の自動入射軸合わせ方法。
【請求項1】
1個以上のレンズで構成される集束レンズ群と、1個以上のレンズで構成される対物レンズ群と、1個以上のレンズで構成される中間レンズ群と、1個以上のレンズで構成される投影レンズ群と、1個以上の対物絞りを備え、電子銃の第1のアノード電極A1及び第2のアノード電極A2に電界を印加することによってエミッタから電子ビームを発生させる冷陰極電子銃を備え、該電子銃のアノード電極A2に対する機械的位置を調整するためのモータを備えた透過型電子顕微鏡において、
前記モータを駆動して電子銃を機械的に走査させ、環状のアノード電極A2の開口に対する電子ビームの入射軸を調整し、アノード電極A2の開口を通過する電流量が最大となる時の前記電子銃の最適な機械的位置を自動的に取得することを特徴とする冷陰極電子銃の自動入射軸合わせ方法。
【請求項2】
電子銃のエミッタから放射された電子が前記第2のアノード電極A2に照射された時のスポットを第1スポット、エミッタ以外の部分から放射された電子が前記第2のアノード電極A2に照射された時のスポットを第2スポットとし、電子銃をモータ駆動により走査させながら、それぞれの第1スポットの座標(Xn,Yn)毎に、第2のアノード電極A2に流れる電流IA2(Xn,Yn)を測定してメモリに記憶し、(Xn,Yn)毎に電子銃アライメントを走査させて電子銃アライメントコイルのデータ毎に蛍光板で検出される電流IS(Xn,Yn)を測定してメモリに記憶し、
一通り電子銃を走査させた後、アノード電極A2で検出した電流IA2(Xn,Yn)の最大値IA2maxと、蛍光板で検出した電流IS(Xn,Yn)の最大値ISmaxを取得し、Its=C1・ISmaxで定義される蛍光板で検出した電流の閾値と、ItA2=C2・IA2maxで定義されるアノード電極A2で検出した電流の閾値に対して、
Is≧Its=C1・ISmaxかつIA2<ItA2=C2・IA2maxが満たされる時、第1スポットが最適な位置(Xopt,Yopt)にあると判定することを特徴とする請求項1記載の冷陰極電子銃の自動入射軸合わせ方法。
【請求項3】
前記電流IS(Xn,Yn)を蛍光板の代わりに集束絞りで検出することを特徴とする請求項2記載の冷陰極電子銃の自動入射軸合わせ方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2010−182466(P2010−182466A)
【公開日】平成22年8月19日(2010.8.19)
【国際特許分類】
【出願番号】特願2009−23270(P2009−23270)
【出願日】平成21年2月4日(2009.2.4)
【出願人】(000004271)日本電子株式会社 (811)
【Fターム(参考)】
【公開日】平成22年8月19日(2010.8.19)
【国際特許分類】
【出願日】平成21年2月4日(2009.2.4)
【出願人】(000004271)日本電子株式会社 (811)
【Fターム(参考)】
[ Back to top ]