
処理システム
【課題】一の処理装置の機能上必要な計時を他の処理装置で代替し、前記一の処理装置で有効に消費電力を低減することができる処理システムを提供する。
【解決手段】一の処理装置である電源管理ECU1は、常時的に高精度に計時処理を行なうことが可能な特定の処理装置であるボディECU2での計時の要否を判断し(ステップS1)、要と判断した場合は(S1:YES)、指定時間と共に計時依頼をボディECU2へ送信する(ステップS3)。特定の処理装置であるボディECU2は、計時依頼を受信し(ステップS6)、指定時間の計時を開始し(ステップS8)、指定時間が経過したと判断した場合(S9:YES)、指定時間経過の通知を電源管理ECU1へ送信する(ステップS10)。
【解決手段】一の処理装置である電源管理ECU1は、常時的に高精度に計時処理を行なうことが可能な特定の処理装置であるボディECU2での計時の要否を判断し(ステップS1)、要と判断した場合は(S1:YES)、指定時間と共に計時依頼をボディECU2へ送信する(ステップS3)。特定の処理装置であるボディECU2は、計時依頼を受信し(ステップS6)、指定時間の計時を開始し(ステップS8)、指定時間が経過したと判断した場合(S9:YES)、指定時間経過の通知を電源管理ECU1へ送信する(ステップS10)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、各々でクロック回路を備えて処理を行なう処理装置を複数含み、夫々の処理により連携して処理を行なう処理システムに関し、特に、一の処理装置の機能上必要な計時を他の処理装置で代替し、前記一の処理装置で有効に消費電力を低減することができる処理システムに関する。
【背景技術】
【0002】
多数の処理装置に夫々の処理を実行させ、全体として多様な機能を実現させる処理システムが普及している。各処理装置は通信手段を設けて相互にデータを交換させ、個々の処理装置が独立した処理のみならず、他の処理装置が出力するデータに基づいて演算を行なうか、又は制御対象の機器を制御するなど、連携して処理を実行する処理システムが各分野で利用されている。
【0003】
このような処理システム全体としては動作中でも、常時的に全ての処理装置が稼動している必要はない。各分野で機器の省電力化が進められていることから、一部の処理装置は、自身の動作が不要である場合は、クロック回路を停止させるなど休止状態(スリープ状態)へ移行してもよい。各処理装置に用いられるマイクロコンピュータ(以下、マイコンという)では昨今、省電力モードへの移行が可能なものが普及している。
【0004】
マイコンにおける省電力モードは、クロック回路におけるクロック周波数を低周波数に切り替えるか、クロック周波数の異なる複数のクロック回路を備えて高周波数のクロック回路を停止させるか、又はクロック回路を休止させるなどにより実現される。
【0005】
しかしながら、マイコンを用いて行なう処理の内容によっては、休止状態へ移行するとしても、その間の期間の経過を計時する必要がある場合がある。そこで、異なるクロック周波数のクロック回路を備えて、省電力状態では低周波数のクロック回路に基づく計時を行ないつつ、間欠的に高周波数のクロック回路を起動させて低周波数のクロック回路を用いた計時を補正する方法が提案されている(特許文献1、2)。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2000−098067号公報
【特許文献2】特開2007−304007号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
特許文献1,2に開示されている発明により、省電力状態へ移行しつつも計時を続行することができる。しかしながら、省電力状態であっても、高周波数のクロック回路が短時間でも起動するから、その分電力が消費される。
【0008】
本発明は斯かる事情に鑑みてなされたものであり、省電力状態へ移行する処理装置の機能上必要な計時を、省電力状態とはならない他の処理装置で代替して、計時をしつつ消費電力をより少なくして省電力化を更に効果的にすることができる処理システムを提供することを目的とする。
【課題を解決するための手段】
【0009】
第1発明に係る処理システムは、計時手段による計時に基づき信号処理を行なう複数の処理装置を含み、該複数の処理装置は連携して処理を行なうようにしてある処理システムにおいて、前記複数の処理装置の内の一の処理装置は、他の処理装置の内の特定の処理装置での計時の要否を判断する判断手段と、該判断手段が要と判断した場合、前記特定の処理装置へ指定時間の計時依頼を出力する手段とを備え、前記特定の処理装置は、前記計時依頼を受け付ける手段を備え、依頼された指定時間を計時手段により計時するようにしてあり、前記指定時間が経過した場合、前記一の処理装置へ指定時間経過の通知を出力する手段を備えることを特徴とする。
【0010】
第2発明に係る処理システムは、前記一の処理装置は、計時手段での計時を含む自身の動作を休止する休止状態へ移行する手段を備え、計時依頼を出力後、休止状態へ移行するようにしてあることを特徴とする。
【0011】
第3発明に係る処理システムは、前記一の処理装置は、自身が休止状態へ移行するか否かを判断する休止判断手段を備え、前記判断手段は、前記休止判断手段が休止状態へ移行すると判断したときに前記特定の処理装置へ計時依頼を出力するようにしてあることを特徴とする。
【0012】
第4発明に係る処理システムは、前記複数の処理装置は、車両に搭載されており、前記休止判断手段は、イグニッションスイッチのオフを検知した場合に、休止状態へ移行すると判断し、前記特定の処理装置へ計時依頼を出力するようにしてあることを特徴とする。
【0013】
第5発明に係る処理システムは、前記一の処理装置は、他から任意の入力を受けた場合に、休止状態から非休止状態へ移行するようにしてあり、前記一の処理装置は、前記特定の処理装置からの指定時間経過の通知以外で非休止状態へ移行した場合、計時中止の通知を前記特定の処理装置へ出力する手段を備えることを特徴とする。
【0014】
第6発明に係る処理システムは、前記特定の処理装置は、前記計時依頼を受け付けた場合、前記一の処理装置へ応答を出力する手段を備え、前記一の処理装置は、前記応答を受け付ける手段を備え、前記応答がない場合、休止状態への移行を中止するようにしてあることを特徴とする。
【0015】
第7発明に係る処理システムは、前記一の処理装置は、クロック周波数が異なる複数の計時手段を備え、クロック周波数がより高い計時手段による計時を停止させる際に、前記判断手段により前記特定の処理装置での計時を要と判断するようにしてあることを特徴とする。
【0016】
第8発明に係る処理システムは、前記複数の処理装置は、車両に搭載されており、前記処理装置は、車両状況情報を取得する手段と、取得した車両状況情報に基づき指定時間を算出する手段とを備えることを特徴とする。
【0017】
第1発明では、各々計時手段を備えて信号処理を行なう処理装置の内、一の処理装置にて特定の処理装置での計時が要と判断された場合、前記一の処理装置から特定の処理装置へ指定時間と共に計時依頼が出力され、特定の処理装置では計時依頼に応じて計時がなされて、指定時間が経過した場合に、依頼元の一の処理装置へ通知がなされる。これにより、一の処理装置では特定の処理装置で計時が代替されている間に、計時手段による計時を停止することが可能である。
【0018】
第2発明では、特定の処理装置に計時の代替を依頼した一の処理装置は、計時依頼を出力した後は、任意のタイミングで、計時手段での計時を含む自身の動作を休止する休止状態へ移行することが可能である。
【0019】
第3発明では、一の処理装置が、自身が休止状態へ移行すべきと判断した時点で、特定の処理装置で以後の計時を行なわれるべく計時依頼が出力される。第1発明又は第2発明では、特定の処理装置での計時依頼がされたとしても、一の処理装置で必ず休止状態へ移行するとは限らなかったところ、第3発明では、自身が休止状態へ移行する場合は計時の代替処理が必要であると判断されて計時依頼が出力される。
【0020】
第4発明では、処理システムは車両に搭載されており、イグニッションスイッチがオフとなって特定の処理装置以外の処理装置が休止状態へ移行する際に、計時が必要な一の処理装置から特定の処理装置へ計時依頼が出力される。車両の制御システムなどの処理システムに、監視機能のために計時を持続する特定の処理装置が存在する場合、当該特定の処理装置にて計時が肩代わりされる。これにより、車両の制御システムで効果的に消費電力を低減させることが可能である。
【0021】
第5発明では、処理装置は休止状態にある場合でも他の装置から信号の出力を受けた場合に非休止状態へ移行して処理を開始する。特定の処理装置から指定時間経過の通知の出力を受けた場合もこれを契機に非休止状態へ移行する。ただし、特定の処理装置へ計時依頼を出力して休止状態へ移行していた一の処理装置が、他の出力を受けて非休止状態へ移行し、特定の処理装置での計時が不要となった場合は、特定の処理装置へ計時中止の通知が出力される。これにより、特定の処理装置では、代替して行なう計時を中止でき、不要な処理が行なわれることを回避して処理負荷を軽減させることができる。
【0022】
第6発明では、特定の処理装置は、依頼元の一の処理装置から計時依頼を受け付けた場合に応答を出力し、一の処理装置では、特定の処理装置から応答が無い場合には、計時の代替がされないことを認識することが可能である。この場合、不要に休止状態へ移行して計時がされなくなることを回避することが可能である。
【0023】
第7発明では、一の処理装置はクロック周波数が異なる複数の計時手段を備え、周波数が高い計時手段による計時について、特定の処理装置で代替させるべく計時を依頼する。非休止状態及び休止状態のいずれかのみならず、複数段階で消費電力を節減する状態へ移行する処理装置でも、高精度での計時を他の特定の処理装置にて代替させることで休止状態でなくとも、消費電力を低減させることが可能である。
【0024】
第8発明では、一の処理装置が特定の処理装置に計時を依頼する指定時間は、処理システムが搭載される車両の状況に応じて算出される。これにより、車両状況に応じて柔軟に処理システム全体では機能を落すことなく有効に消費電力を低減させることができる。
【発明の効果】
【0025】
本発明による場合、他の処理装置で代替して計時を行なっている間、一の処理装置では計時手段を停止させることが可能であるから、一の処理装置は任意のタイミングでその後、休止状態(スリープ状態)へ移行でき、有効に消費電力を低減させることができる。処理システム内にシステム状況などを常時的に監視するなどの計時を行なう特定の処理装置が存在する場合、当該特定の処理装置に計時を代替させることにより、他の処理装置は有効に計時を停止して省電力状態へ移行できる。このとき、消費電力が少ない低精度での計時さえも停止させることができるので更に消費電力を低減することができる。
【図面の簡単な説明】
【0026】
【図1】実施の形態1における車載制御システムの構成の一部を示すブロック図である。
【図2】実施の形態1における電源管理ECUからボディECUへ計時依頼がされる場合の処理手順の一例を示すフローチャートである。
【図3】実施の形態2における電源管理ECUからボディECUへ計時依頼がされる場合の処理手順の一例を示すフローチャートである。
【図4】実施の形態3における電源管理ECUからボディECUへ計時依頼がされる場合の処理手順の一例を示すフローチャートである。
【図5】実施の形態4における車載制御システムの構成の一部を示すブロック図である。
【図6】実施の形態4における電源管理ECUからボディECUへ計時依頼がされる場合の処理手順の一例を示すフローチャートである。
【図7】実施の形態5における電源管理ECUからボディECUへ計時依頼がされる場合の処理手順の一例を示すフローチャートである。
【発明を実施するための形態】
【0027】
以下、本発明をその実施の形態を示す図面に基づいて具体的に説明する。
【0028】
なお、以下に示す実施の形態では、本発明に係る処理システムを車両に搭載されて種々の制御を行なうECU(Electronic Control Unit)を含む車載制御システムに適用した例を示す。
【0029】
(実施の形態1)
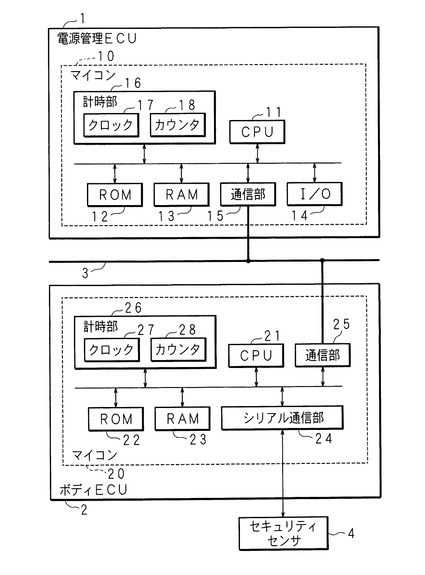
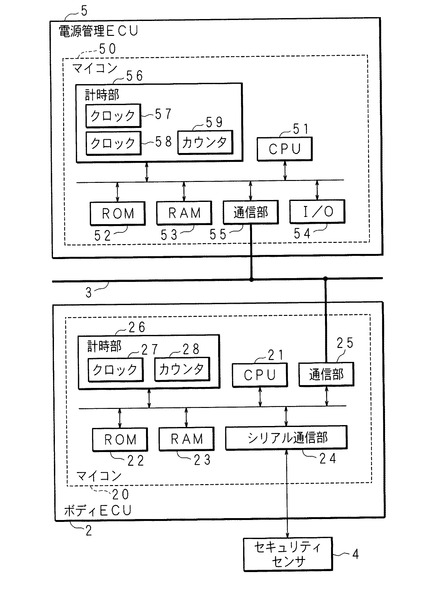
図1は、実施の形態1における車載制御システムの構成の一部を示すブロック図である。車載制御システムは、電源管理ECU1及びボディECU2と、車載ネットワーク3とを含む。車載制御システムは、図1に示す電源管理ECU1及びボディECU2以外のECU、各種アクチュエータ、センサなどを含むことは言うまでもない。
【0030】
電源管理ECU1は、バッテリ残量を監視し、バッテリ上がりを防止するための処理、電力分配の効率化処理などを実現するECUである。ボディECU2は、ボディ系の各センサから出力される情報を用いてドアロック、ヘッドライト、ワイパーなどのボディ系のアクチュエータの動作を制御するECUである。本実施の形態におけるボディECU2は特に、セキュリティセンサ4と接続され、エンジン停止中でも車両の内外状況を監視して盗難、いたずらなどを防止する機能を実現する。
【0031】
電源管理ECU1は、CPU11、ROM(Read Only Memory)12、RAM(Random Access Memory)13、I/O(Input/Output)14、通信部15、計時部16を含むマイクロコンピュータ(以下、マイコン)10を備える。
【0032】
CPU11は、ROM12に記憶されている制御プログラムを読み出して実行することにより、マイコン10を電源管理処理を行なうハードウェアとして動作させ、接続されるバッテリ、オルタネータなどから得られる信号に基づく処理を行なう。例えば、電源管理ECU1のマイコン10は、バッテリの駆動が停止してからの期間を測定し、所定時間を経過した場合にはバッテリ上がりを警告する処理を行なうなどの処理を実現する。
【0033】
ROM12は、フラッシュメモリ、マスクROM、EPROM(Erasable Programmable ROM)、又はEEPROM(Electrically Erasable Programmable ROM)等の不揮発性メモリを利用する。ROM12には、CPU11が読み出して実行する制御プログラム、または電源管理処理を行なうための各種情報が記憶されている。
【0034】
RAM13は、SRAM(Static Random Access Memory)又はDRAM(Dynamic Random Access Memory)等のデータの書き換えが可能で且つ高速にアクセスすることが可能なメモリを利用する。RAM13には、CPU11にて実行される各種プログラムが読み出されて記憶されると共に、CPU11による演算処理の過程で発生するデータが一時的に記憶される。
【0035】
I/O14は、外部からの信号入力を受け付けると共に、外部への信号出力を実現する複数の端子を含むインタフェースである。A/D変換、D/A変換機能を有している構成としてもよい。I/O14には、バッテリ又はオルタネータなどの動作状態を検知するセンサが接続される。
【0036】
通信部15は、ネットワークコントローラ機能を有し、マイコン10による車載ネットワーク3における通信を実現する。通信部15は具体的に、CAN(Control Area Network)、LIN(Local Interconnect Network)、又はFlexRayなどのプロトコルに準じたネットワークコントローラを用い、CPU11から与えられるデータをプロトコルに準じた信号へ変換して車載ネットワーク3へ出力する。なお、物理層での送受信を実現するトランシーバは図示を省略する。
【0037】
計時部16は、水晶振動子、セラミック振動子などのクロック17と、クロック17からのクロック信号を計数して時間を測定するカウンタ18とを含む。計時部16は、クロック17からの所定の周波数のクロック信号を、CPU11等のマイコン10の各構成部へ出力する。実施の形態1における電源管理ECU1のクロック17は、例えば32KHzのクロック信号を出力する。マイコン10の各構成部は、計時部16から出力されるクロック信号に同期して処理を行なう。なお、計時部16はマイコン10外部に備えられる構成としてもよい。
【0038】
ボディECU2は、CPU21、ROM22、RAM23、シリアル通信部24、通信部25、計時部26を含むマイクロコンピュータ(以下、マイコン)20を備える。図1では、マイコン20のI/Oの図示を省略しているが、I/Oにより各種アクチュエータ、センサなどと接続されていてもよい。
【0039】
CPU21は、ROM22に記憶されている制御プログラムを読み出して実行することにより、マイコン20をボディ系の各種アクチュエータの動作を制御するハードウェアとして動作させる。
【0040】
ROM22は、フラッシュメモリ、マスクROM、EPROM、EEPROM等の不揮発性メモリを利用する。ROM22にはCPU21が読み出して実行する制御プログラム、又は制御に用いる各種情報が記憶されている。
【0041】
RAM23は、SRAM又はDRAM等のメモリを利用する。RAM23には、CPU21にて実行される各種プログラムが読み出されて記憶されると共に、CPU21による演算処理の過程で発生するデータが一時的に記憶される。
【0042】
シリアル通信部24は、図1中のセキュリティセンサ4などのセンサまたは他の装置などとのシリアル通信を実現する。なお、シリアル通信部24におけるシリアル通信では、後述する計時部26からのクロック信号が必要である。セキュリティセンサ4は、特にエンジン停止中に車両の内外の状況を監視して情報をボディECU2へ通知する。したがって、エンジン停止中でもシリアル通信部24は、通信が可能なように待機する。
【0043】
通信部25は、ネットワークコントローラ機能を有し、マイコン20による車載ネットワーク3における通信を実現する。電源管理ECU1の通信部15同様に、データを所定のプロトコルの信号に変換して出力する。ボディECU2は、通信部25により、車載ネットワーク3を介して電源管理ECU1と通信が可能である。
【0044】
計時部26は、水晶振動子、セラミック振動子などのクロック27と、クロック27からのクロック信号を計数して時間を測定するカウンタ28とを含む。計時部26は、クロック27からの所定の周波数のクロック信号をCPU21等のマイコン20の各構成部へ出力する。実施の形態1におけるボディECU2のクロック27は、例えば4MHzのクロック信号を出力する。マイコン20の各構成部は、計時部26から出力されるクロック信号に同期して処理を行なう。特に、上述したようにシリアル通信部24は、計時部26から出力される4MHzのクロック信号に同期して通信信号を送受信する。なお、計時部26はマイコン20外部に備えられる構成としてもよい。更に、CPU21、ROM22、RAM23等では低周波数のクロック信号に同期して処理を行なうために、クロック信号を分波して一方を低周波数のクロック信号へ変換する周波数変換部を備えてもよい。
【0045】
このように構成される車載制御システムにおいて、電源管理ECU1のマイコン10は、電源管理処理の内のバッテリ上がりを防止する処理として、エンジンが停止した場合などオルタネータからの充電が停止してから所定時間が経過したとき、バッテリ残量が維持されるように他の機器の電力消費を停止させるか、ユーザへの警告処理などを行なう。このときマイコン10は、計時部16におけるカウンタ18にて、前記所定時間が経過したか否かを監視させてもよい。しかしながら、エンジン停止中は当該所定時間が経過したか否かの処理、即ち所定時間の計時処理以外の処理は行なわずともよくなる。
【0046】
一方、ボディECU2では、エンジン停止中であっても、セキュリティセンサ4からの情報を受けるために、シリアル通信部24を含む各構成部の動作を継続する。したがって、計時部26からのクロック信号の出力は継続され、計時部26における計時も可能である。
【0047】
そこで、実施の形態1における車載制御システムでは、電源管理ECU1は、計時処理を高精度のクロック27を備えるボディECU2へ依頼し、自身はスリープ状態(休止状態)への移行が可能な状態となるようにする。ボディECU2では、依頼に応じて計時部26にて計時を肩代わりし、電源管理ECU1から指定された時間が経過した場合に、電源管理ECU1へ通知する。
【0048】
以下、フローチャートを参照して、電源管理ECU1のマイコン10及びボディECU2のマイコン20による処理の詳細を説明する。
【0049】
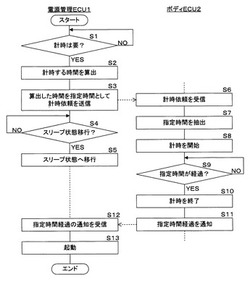
図2は、実施の形態1における電源管理ECU1からボディECU2へ計時依頼がされる場合の処理手順の一例を示すフローチャートである。
【0050】
電源管理ECU1のCPU11は、高精度のクロック27を備えた特定の処理装置であるボディECU2での計時の要否を判断する(ステップS1)。詳細には、CPU11はバッテリ残量を監視する処理を行なっており、残量が所定量未満となった場合、以後バッテリ残量に応じた所定の時間が経過したときにバッテリ上がりの発生が推測されることから、前記所定の時間の計時を要と判断する。このとき、所定の時間は例えば20日間である。20日間等の期間を計時するには、クロックの精度が高精度であることが望まれる。期間が長いために誤差の影響が非常に大きくなるからである。また、ステップS1では、CPU11はエンジンが停止されたか、バッテリからの電源供給が停止されたかなどを監視しており、エンジンが停止され且つアクセサリもオフとなってバッテリからの電源供給が停止された場合に、計時を要と判断するようにしてもよい。
【0051】
CPU11は、ボディECU2での計時を不要と判断した場合(S1:NO)、処理をステップS1へ戻す。
【0052】
CPU11は、ボディECU2での計時を要と判断した場合(S1:YES)、バッテリ残量などの車両の電源状況に基づき、計時する時間を算出する(ステップS2)。なお、ステップS2は必須ではなく、CPU11は車両の状況に関わらず、ROM12に記憶してある時間を読み出す処理を行なう構成としてもよい。
【0053】
CPU11は、ステップS2にて算出した時間を指定時間として、計時依頼をボディECU2へ通信部15により送信する(ステップS3)。CPU11は、計時依頼を送信した後はアイドル状態へ移行し、マイコン10がスリープ状態への移行が可能な状態へ遷移する。CPU11は、以後、車載ネットワーク3に接続されている他のECUと共に、車載ネットワーク3を介してスリープ状態への移行指示を受信したか否かを判断し(ステップS4)、移行指示を受信したと判断した場合は(S4:YES)、計時部16のクロック17を停止し、マイコン10はスリープ状態へ移行する(ステップS5)。CPU11は、スリープ状態への移行指示を受信していないと判断した場合(S4:NO)、処理をステップS4へ戻す。このとき、他のECUからのメッセージが通信部15により受信された場合など、アイドル状態から稼働状態へ移行して電源管理処理を持続する。
【0054】
電源管理ECU1から計時依頼が送信されたボディECU2では、CPU21が通信部25により計時依頼を受信する(ステップS6)。CPU21は、受信した計時依頼に含まれる指定時間を抽出し(ステップS7)、前記指定時間の計時を計時部26のカウンタ28により開始する(ステップS8)。
【0055】
CPU21は、カウンタ28により指定時間が経過したか否かを判断し(ステップS9)、経過していないと判断した場合(S9:NO)、処理をステップS9へ戻して指定期間が経過するまで待機する。CPU21は、ステップS9にて経過したと判断した場合(S9:YES)、カウンタ28における計数を停止して計時を終了し(ステップS10)、指定時間経過の通知を通信部25により電源管理ECU1へ送信する(ステップS11)。
【0056】
電源管理ECU1のCPU10は、ステップS5にてスリープ状態へ移行している場合、ボディECU2から指定時間経過の通知が送信された場合、通信部15にてこれを受信し(ステップS12)、マイコン10はスリープ状態から起動し(ステップS13)、処理を終了する。なおこのとき、車載ネットワーク3に指定時間経過の通知が送信されるので、スリープ状態へ移行している他のECUも起動させる可能性がある。当該指定時間経過の通知では、電源管理ECU1のマイコン10のみ起動することができるように構成とすることが好ましい。具体的には、指定時間経過の通知が車載ネットワーク3を介して送信された場合、当該通知であることを検知した他のECUの通信部はマイコンへ通知しないように制御される。
【0057】
なお、電源管理ECU1のマイコン10がステップS5にてスリープ状態へ移行していない場合も、CPU11は、ステップS12のように指定時間経過の通知を受信し、指定時間が経過したときの電源管理処理、例えば、他のECUへの電源の供給を停止するか、又は警告を出力するなどの処理を実行する。
【0058】
図2に示した処理手順により、電源管理ECU1の電源管理処理の内の計時処理は継続してボディECU2で代替して行なわれるから、マイコン10が計時部16を停止してスリープ状態へ移行することができる。従来では、電源管理ECU1は、エンジン停止中などでも、バッテリ上がり防止の目的で経過時間を測定するためにクロックを停止させない構成としていた。たとえば、エンジン停止中などスリープ状態へ移行できるときでも、低精度クロックは少なくとも稼働させて経過時間の測定を行なう構成としていた。このような構成と比較して、実施の形態1における車載制御システムでは、計時処理は継続されつつも電源管理ECU1はスリープ状態へ移行することができ、効果的に消費電力を低減させることができる。
【0059】
(実施の形態2)
実施の形態2では、電源管理ECU1のマイコン10は車両のイグニッションスイッチがオフとなったことを検知し、スリープ状態へ移行する際に所定の時間の計測をボディECU2に代替させるべく計時依頼を出力する。
【0060】
実施の形態2における車載制御システムの構成は、電源管理ECU1がボディECU2へ計時依頼を出力する処理手順が異なる以外は、実施の形態1と同様である。したがって、以下、実施の形態1と共通する構成については同一の符号を付して説明を省略し、電源管理ECU1のマイコン10及びボディECU2のマイコン20による計時依頼についての処理の詳細を説明する。
【0061】
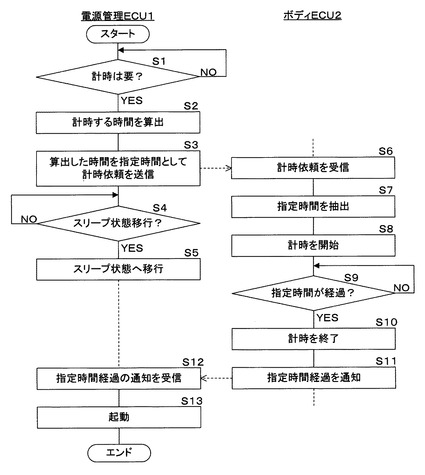
図3は、実施の形態2における電源管理ECU1からボディECU2へ計時依頼がされる場合の処理手順の一例を示すフローチャートである。なお、以下に示す処理手順の内、実施の形態1の図2に示した処理手順と共通するステップについては同一のステップ番号を付し、詳細な説明を省略する。
【0062】
電源管理ECU1のCPU11は、通信部15により車載ネットワーク3を介して受信するデータに基づき、イグニッションスイッチのオフを検知したか否かを判断する(ステップS21)。イグニッションスイッチに接続されている図示しない他のECUは、スイッチがイグニッションキーにより切り替えられた場合にこれを検知して車載ネットワークへスイッチ状態を示すデータを送信するようにしてある。CPU11は、イグニッションスイッチのオフを検知していないと判断した場合(S21:NO)、処理をステップS21へ戻す。
【0063】
CPU11は、イグニッションスイッチのオフを検知したと判断した場合(S21:YES)、自身もスリープ状態へ移行すべく、またエンジンが停止されてオルタネータからのバッテリへの充電も停止されるから、バッテリ残量に応じた所定の時間の計測が必要であると判断する(ステップS22)。
【0064】
CPU11は、計時する時間を算出し(S2)、計時依頼を送信して(S3)、計時部16のクロック17を停止させ、これによりマイコン10はスリープ状態へ移行する(S5)。
【0065】
計時依頼を電源管理ECU1から受信するボディECU2における処理(S6〜S11)、及び指定時間経過の通知を受ける電源管理ECU1の処理(S12,13)は図2のフローチャートに示した処理と同様であるので詳細な説明は省略する。
【0066】
実施の形態1では、電源管理ECU1のマイコン10がスリープ状態へ移行するか否かに関わらず、バッテリ残量などから計時が必要と判断された場合に、ボディECU2での代替処理が行なわれる構成とした。これに対し、実施の形態2では、上述のように、車載制御システムにてイグニッションスイッチがオフされたことに応じて、システム全体で小電力状態へ移行すべき場合に、電源管理ECU1のマイコン10はクロック17を停止させる。この場合も、低精度クロックは少なくとも稼働させて経過時間の測定を行なう構成と比較して、車載制御システム全体として効果的に消費電力を低減させることができる点で、優れた効果を奏する。
【0067】
(実施の形態3)
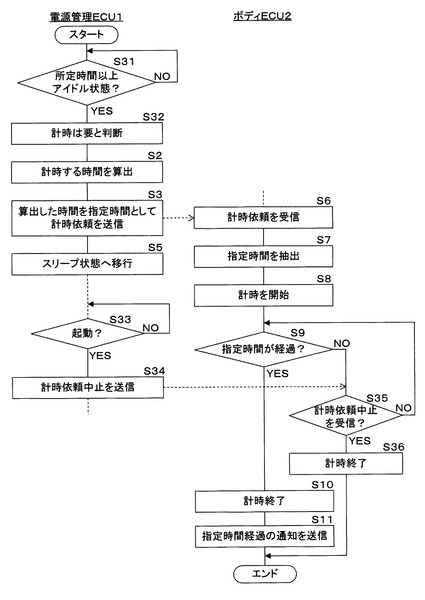
実施の形態3では、電源管理ECU1のマイコン10はアイドル状態が一定時間以上となった場合に自身がスリープ状態へ移行すべきと判断してスリープ状態へ移行すると共に計時依頼を送信する。更に、実施の形態3ではボディECU2から指定時間経過の通知を受けること以外を契機に起動し、指定時間の計測が不要となった場合にボディECU2での計時を中止させる。
【0068】
実施の形態3における車載制御システムの構成は、電源管理ECU1がボディECU2へ計時依頼を出力する処理手順が異なる以外は、実施の形態1と同様である。したがって、以下、実施の形態1と共通する構成については同一の符号を付して説明を省略し、電源管理ECU1のマイコン10及びボディECU2のマイコン20による計時依頼についての処理の詳細を説明する。
【0069】
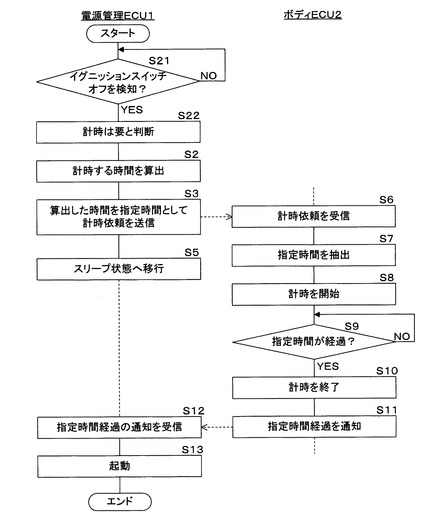
図4は、実施の形態3における電源管理ECU1からボディECU2へ計時依頼がされる場合の処理手順の一例を示すフローチャートである。なお、以下に示す処理手順の内、実施の形態1の図2に示した処理手順と共通するステップについては同一のステップ番号を付し、詳細な説明を省略する。
【0070】
電源管理ECU1のCPU11は、マイコン10のI/O14における入出力がないアイドル状態が所定時間以上継続しているか否かを判断する(ステップS31)。ステップS31の処理は、マイコン10がスリープ状態へ移行するか否かの判断の一例である。スリープ状態へ移行するか否かの判断が可能であれば、アイドル状態が所定時間以上継続しているか否かの判断には限られない。明示的に他の装置からスリープ状態への移行指示があった場合に、スリープ状態へ移行すると判断してもよい。
【0071】
CPU11は、アイドル状態は所定時間未満であると判断した場合(S31:NO)、処理をステップS31へ戻す。
【0072】
CPU11は、アイドル状態が所定時間以上継続していると判断した場合(S31:YES)、スリープ状態へ移行すべく、またエンジンが停止されてオルタネータからのバッテリへの充電も停止されるから、バッテリ残量に応じた所定の時間の計測が必要であると判断する(ステップS32)。
【0073】
CPU11は、計時する時間を算出し(S2)、計時依頼を送信して(S3)、計時部16のクロック17を停止させる、これによりマイコン10はスリープ状態へ移行する(S5)。
【0074】
ボディECU2のCPU21は、通信部25により計時依頼を受信し(S6)、指定時間を抽出して(S7)、計時を開始し(S8)、指定時間が経過したか否か判断する(S9)。
【0075】
このとき電源管理ECU1では、CPU11は、スリープ状態へ移行した後、I/O14に外部からの入力を受け付けて起動されたか否かを判断する(ステップS33)。マイコン10は、外部からの入力をI/O14から受け付けた場合、稼働状態へ起動するようにしてある。なお、通信部15により指定時間結果の通知以外でも特定のデータ、例えばイグニッションスイッチがスタートとなったことを示すデータを受信した場合などに起動してもよい。
【0076】
CPU11は、外部から起動されない場合は(S33:NO)、そのままスリープ状態である。CPU11は、起動されたと判断した場合(S33:YES)、計時依頼中止をボディECU2へ通信部15により送信する(ステップS34)。電源管理ECU1が起動して、バッテリへの充電も開始されてバッテリ上がりが予想される所定時間の経過を測定する必要がなくなった場合に、ボディECU2での不要な処理を停止させるためである。
【0077】
一方でボディECU2のCPU21は、計時依頼中止が送信される場合に対応して、計時を開始した後、指定時間が経過していないと判断した場合(S9:NO)、計時依頼中止を通信部25により受信したか否かを判断する(ステップS35)。CPU21は、指定時間も経過せず、計時依頼中止も受信していないと判断した場合(S35:NO)、処理をステップS9へ戻し、指定時間が経過するか、計時依頼中止を受信するまで待機する。
【0078】
CPU21は、計時依頼中止を受信する前にステップS9で指定時間が経過したと判断した場合は(S9:YES)、計時を終了して(S10)、指定時間経過の通知を送信し(S15)、処理を終了する。この場合の電源管理ECU1が指定時間経過の通知を受信し場合の処理は、実施の形態1の図2のフローチャートの説明で示した。
【0079】
CPU21は、指定時間が経過する前に、電源管理ECU1から計時依頼中止を受信したと判断した場合(S35:YES)、CPU21は、カウンタ28における計数を停止して計時を終了し(ステップS36)、処理を終了する。
【0080】
このように実施の形態3では、電源管理ECU1にてアイドル状態が続いて一旦、ボディECU2での計時が必要と判断されて、計時依頼が送信された後でも、指定時間が経過する前に、以後の計時が不要と判断された場合には、無駄にボディECU2で計時処理が継続されることがない。したがって、車載制御システムにおけるスリープ状態への移行を効果的としつつも、計時を肩代わりするボディECU2での処理負荷を軽減することができる。
【0081】
(実施の形態4)
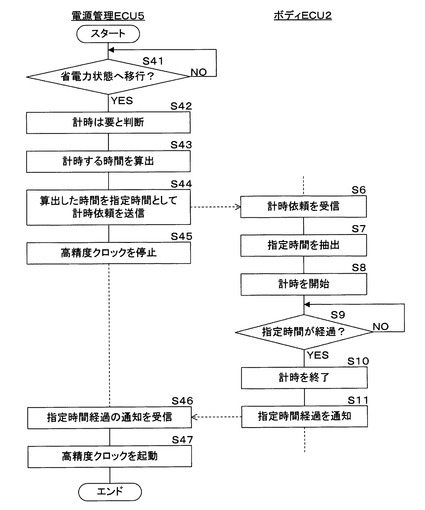
実施の形態1乃至3では、電源管理ECU1は、低精度のクロック17のみを備え、ボディECU2へ計時を依頼した後はスリープ状態へ移行して、自身の動作を休止する構成とした。実施の形態4では、電源管理ECUは、低精度のクロックのみならず高精度のクロックをも備え、計時を依頼した後は、高精度のクロックの動作のみ不要として停止させ、スリープ状態ではないものの、消費電力が少ない省電力状態へ移行する構成とする。
【0082】
図5は、実施の形態4における車載制御システムの構成の一部を示すブロック図である。実施の形態4における車載制御システムの構成は、クロック周波数が異なる複数のクロックを備える電源管理ECU5であること、及び電源管理ECU5における省電力状態への移行処理が異なること以外、ボディECU2の内部構成などは実施の形態1の構成と同様である。したがって、以下の説明では、実施の形態1の構成と共通する部分については同一の符号を付して詳細な説明を省略する。
【0083】
電源管理ECU5は、実施の形態1の電源管理ECU1同様に、CPU51、ROM52、RAM53、I/O54、通信部55、計時部56を含むマイコン50を備える。マイコン50の構成部の内、計時部56の構成以外は、実施の形態1の電源管理ECU1の各構成部と同様であるので詳細な説明は省略する。
【0084】
実施の形態4の電源管理ECU5のマイコン50は、計時部56に、周波数が異なる複数のクロック57,58を備える。クロック57,58は、水晶振動子、セラミック振動子などを用いる。一方のクロック57は例えば、32KHzのクロック信号を出力するようにしてあり、他方のクロック58は、4MHzのクロック信号を出力するようにしてある。また、計時部56に、クロック57,58のいずれかから出力されるクロック信号を計数して時間を測定するカウンタ59を含む。
【0085】
マイコン50の構成部は基本的に、低周波数のクロック信号を出力する低精度のクロック57から出力されるクロック信号に同期して処理を行なう。ただし、高速な処理を行なうことが必要な場合、また、特に動作中に高精度の計時が必要な場合は高周波数のクロック信号を出力する高精度のクロック58から出力されるクロック信号を用いる。例えば、マイコン50のCPU51は、バッテリ残量を監視する処理を行なっており、残量が所定量未満となった場合、以後バッテリ残量に応じた所定の時間が経過したときにバッテリ上がりの発生が推測されることから、前記所定の時間の計時を行なう。このとき、所定の時間は例えば20日間である。20日間等の期間を計時するには、クロックの精度が高精度であることが望まれるから、当該期間を計時する場合にはマイコン50は、クロック58からのクロック信号を用いてカウンタ59にて計時する。
【0086】
ただし、実施の形態1乃至3に示したように、電源管理ECU5が、エンジン停止中などに、所定の時間の経過を測定する処理のみを行なう場合をもクロック58を依然として動作させる構成では、エンジン停止中にも拘わらず、電源管理ECU5は通常同様の消費電力を消費する。この場合、省電力化は効果的でない。
【0087】
したがって、実施の形態4でも、エンジンが停止されるなどの状況で、バッテリ上がりを防止するための所定の時間の計時が必要な場合には、自身の計時部56の代わりに、所定の時間の計時を、高精度のクロック27を備えるボディECU2にて行なわれるべく、ボディECU2へ計時依頼を送信する。
【0088】
以下、電源管理ECU5のマイコン50及びボディECU2のマイコン20による処理の詳細を説明する。
【0089】
図6は、実施の形態4における電源管理ECU5からボディECU2へ計時依頼がされる場合の処理手順の一例を示すフローチャートである。なお、以下に示す処理手順の内、実施の形態1の図2に示した処理手順と共通するボディECU2における処理手順については同一のステップ番号を付し、詳細な説明を省略する。
【0090】
電源管理ECU5のCPU51は、自身が省電力状態へ移行するか否かを判断する(ステップS41)。ステップS41は具体的には、アイドル状態が所定時間以上継続した場合、イグニッションスイッチのオフが検知された場合、また車載ネットワーク3に接続される他の装置から明示的に省電力状態への移行が指示された場合に、省電力状態へ移行すると判断する。
【0091】
CPU51は、省電力状態へ移行しないと判断した場合(S41:NO)、処理をステップS41へ戻す。CPU51は、省電力状態へ移行すると判断した場合(S41:YES)、自身の計時部56の代わりにボディECU2における計時が要と判断する(ステップS42)。
【0092】
CPU51は、以後、計時する時間を算出し(ステップS43)、算出した時間を指定時間として、計時依頼をボディECU2へ通信部35により送信する(ステップS44)。なお、算出する時間は、現在計時中であれば残時間が算出されてもよいし、改めてバッテリ残量などの車両の電源状況に基づき、計時する時間を算出してもよい。なお、ステップS43の算出は必須でなく、CPU51は車両の状況に関わらず、ROM52に記憶してある時間を読み出す処理を行なう構成としてもよい。
【0093】
次にCPU51は、計時依頼を送信した後は、高精度のクロック58を停止させ(ステップS45)、低精度のクロック57から出力されるクロック信号に基づき処理を行なう。これにより、電源管理ECU5の消費電力は、クロック58の分だけ低減されて省電力状態へ移行される。
【0094】
ボディECU2では、CPU21が計時依頼を受信し(S6)、指定時間を抽出し(S7)、指定時間の計時を開始し(S8)、指定時間が経過した場合に(S9:YES)、計時を終了し(S10)、指定時間経過の通知を電源管理ECU5へ送信する(S11)。
【0095】
電源管理ECU5のCPU51は、ボディECU2から送信された指定時間経過の通知を受信し(ステップS46)、高精度のクロック58を起動して(ステップS47)、処理を終了する。このときマイコン50は省電力状態から稼働状態へ戻り、指定時間が経過したときの電源管理処理、例えば、他のECUへの電源の供給を停止するか、又は警告を出力するなどの処理を実行する。
【0096】
なお、実施の形態4でも、車載ネットワーク3に指定時間経過の通知が送信されるときには、省電力状態又はスリープ状態へ移行している他のECUも起動させる可能性がある。当該指定時間経過の通知では、電源管理ECU5による電源管理処理が稼働すればよいから、マイコン50のみ起動することができるように構成とすることが好ましい。具体的には、指定時間経過の通知が車載ネットワーク3を介して送信された場合、当該通知であることを検知した他のECUの通信部はマイコンへ通知しないように制御される。
【0097】
このような処理手順により、電源管理ECU5の電源管理処理の内、エンジンが停止されている間での高精度計時処理は、ボディECU2で代替して行なわれるから、マイコン50の計時部56における高精度のクロック58、即ち消費電力が多いクロック58が停止し続ける省電力状態へ移行することができる。従来では、電源管理ECU1は、エンジン停止中などでも、バッテリ上がり防止の目的で経過時間を測定するために低精度のクロック57により計時し、間欠的に高精度のクロック58を起動して誤差を補正するなどの処理が行なわれていた。このような構成と比較して、実施の形態4における車載制御システムでは、計時処理は継続されつつも消費電力が多いクロック58は代替されている期間は完全に停止されるから、効果的に消費電力を低減させることができる。
【0098】
(実施の形態5)
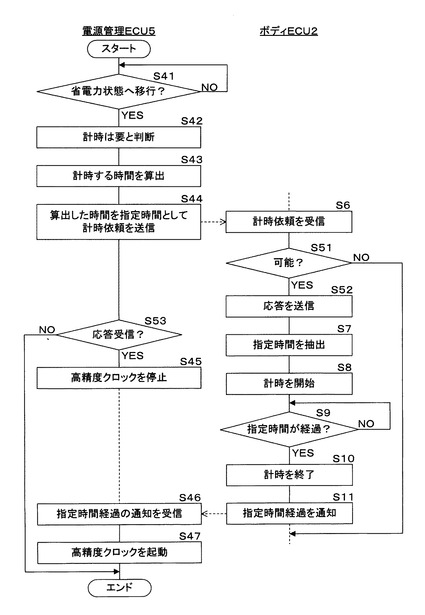
実施の形態5では、電源管理ECU5のCPU51は、ボディECU2へ計時依頼を送信した場合に、ボディECU2から応答がないときには計時依頼ができないことを認識し、省電力状態へ移行せずに自身の計時部56による計時を続行する。
【0099】
実施の形態5における車載制御システムの構成は、電源管理ECU1がボディECU2へ計時依頼を出力する処理手順が異なる以外は、実施の形態4と同様である。したがって、以下、実施の形態4と共通する構成については同一の符号を付して説明を省略し、電源管理ECU5のマイコン50及びボディECU2のマイコン20による計時依頼についての処理の詳細を説明する。
【0100】
図7は、実施の形態5における電源管理ECU5からボディECU2へ計時依頼がされる場合の処理手順の一例を示すフローチャートである。なお、以下に示す処理手順の内、実施の形態4の図6に示した処理手順と共通する処理手順については同一のステップ番号を付し、詳細な説明を省略する。
【0101】
実施の形態5におけるボディECU2では、CPU21は計時依頼を受信した場合(S6)、計時部26で代替して計時が可能か否かを判断する(ステップ51)。例えば、CPU21の処理負荷が過重である場合などは代替して計時することは不可能であると判断する。CPU21は、計時が不可能であると判断した場合(S51:NO)、そのまま処理を終了し、ボディECU2としての処理を継続する。CPU21は、代替して計時が可能であると判断した場合(S51:YES)、応答を通信部25により送信し(ステップS52)、以後、ステップS6で受信した計時依頼に対応して指定時間を抽出し(S7)、指定時間の計時を開始し(S8)、指定時間が経過した場合に(S9:YES)、計時を終了し(S10)、指定時間経過の通知を電源管理ECU5へ送信する(S11)。
【0102】
これに対して電源管理ECU5のCPU51は、計時依頼をボディECU2へ送信した後(S44)、ボディECU2からの応答を通信部55により受信したか否かを判断する(ステップS53)。このとき、CPU51は、応答を受信するまで例えば1秒などの所定時間待機するとする。
【0103】
CPU51は、ステップS53にて応答を受信したと判断した場合(S53:YES)、高精度のクロック58を停止させ(S45)、低精度のクロック57から出力されるクロック信号に基づき処理を行なう。これにより、電源管理ECU5の消費電力は、クロック58の分だけ低減されて省電力状態へ移行される。その後、ボディECU2から送信された指定時間経過の通知を受信した場合は(S46)、高精度のクロック58を起動して(S47)、処理を終了する。このときマイコン50は省電力状態から稼働状態へ戻り、指定時間が経過したときの電源管理処理、例えば、他のECUへの電源の供給を停止するか、又は警告を出力するなどの処理を実行する。
【0104】
CPU51は、ステップS53にて応答を受信しなかったと判断した場合(S53:NO)、ボディECU2での計時は不可能であったとして処理を終了し、省電力状態への移行をせずに以後、クロック58の動作を継続する。バッテリ上がり防止のための所定の時間の計時をクロック58からのクロック信号を用いて行っている場合もこれを継続する。
【0105】
このように、実施の形態5では、電源管理ECU5は、ボディECU2から応答が無い場合には、計時の代替がされないことを認識することが可能である。この場合、電源管理ECU5が不要に省電力状態へ移行して計時がされなくなることを回避することが可能である。
【0106】
上述の実施の形態1乃至5では、電源管理ECU1(又は5、以下同様)とボディECU2とは、車載ネットワーク3を介した通信により、計時依頼の送信及び所定時間経過の通知の送信を行なう構成とした。しかしながら本発明はこれに限らず、電源管理ECU1及びボディECU2は通信部15,25によらず、計時依頼のために直に信号線を介して信号を入出力する構成としてもよい。つまり、電源管理ECU1のCPU11は、通信部15によらず、計時依頼を示す信号をボディECU2へ出力し、ボディECU2も指定時間経過の通知を示す信号を電源管理ECU1へ出力する。この場合、信号の入力により電源管理ECU1のマイコン10が起動するように構成されることが好ましい。これにより、指定時間経過の通知がボディECU2から入力されることにより、電源管理ECU1のみが起動し、他のECUまでも起動することがない。
【0107】
なお、開示された実施の形態は、全ての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上述の説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味及び範囲内での全ての変更が含まれることが意図される。
【符号の説明】
【0108】
1,5 電源管理ECU(一の処理装置)
15,55 通信部
16,56 計時部(計時手段)
2 ボディECU(特定の処理装置)
25 通信部
26 計時部(計時手段)
【技術分野】
【0001】
本発明は、各々でクロック回路を備えて処理を行なう処理装置を複数含み、夫々の処理により連携して処理を行なう処理システムに関し、特に、一の処理装置の機能上必要な計時を他の処理装置で代替し、前記一の処理装置で有効に消費電力を低減することができる処理システムに関する。
【背景技術】
【0002】
多数の処理装置に夫々の処理を実行させ、全体として多様な機能を実現させる処理システムが普及している。各処理装置は通信手段を設けて相互にデータを交換させ、個々の処理装置が独立した処理のみならず、他の処理装置が出力するデータに基づいて演算を行なうか、又は制御対象の機器を制御するなど、連携して処理を実行する処理システムが各分野で利用されている。
【0003】
このような処理システム全体としては動作中でも、常時的に全ての処理装置が稼動している必要はない。各分野で機器の省電力化が進められていることから、一部の処理装置は、自身の動作が不要である場合は、クロック回路を停止させるなど休止状態(スリープ状態)へ移行してもよい。各処理装置に用いられるマイクロコンピュータ(以下、マイコンという)では昨今、省電力モードへの移行が可能なものが普及している。
【0004】
マイコンにおける省電力モードは、クロック回路におけるクロック周波数を低周波数に切り替えるか、クロック周波数の異なる複数のクロック回路を備えて高周波数のクロック回路を停止させるか、又はクロック回路を休止させるなどにより実現される。
【0005】
しかしながら、マイコンを用いて行なう処理の内容によっては、休止状態へ移行するとしても、その間の期間の経過を計時する必要がある場合がある。そこで、異なるクロック周波数のクロック回路を備えて、省電力状態では低周波数のクロック回路に基づく計時を行ないつつ、間欠的に高周波数のクロック回路を起動させて低周波数のクロック回路を用いた計時を補正する方法が提案されている(特許文献1、2)。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2000−098067号公報
【特許文献2】特開2007−304007号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
特許文献1,2に開示されている発明により、省電力状態へ移行しつつも計時を続行することができる。しかしながら、省電力状態であっても、高周波数のクロック回路が短時間でも起動するから、その分電力が消費される。
【0008】
本発明は斯かる事情に鑑みてなされたものであり、省電力状態へ移行する処理装置の機能上必要な計時を、省電力状態とはならない他の処理装置で代替して、計時をしつつ消費電力をより少なくして省電力化を更に効果的にすることができる処理システムを提供することを目的とする。
【課題を解決するための手段】
【0009】
第1発明に係る処理システムは、計時手段による計時に基づき信号処理を行なう複数の処理装置を含み、該複数の処理装置は連携して処理を行なうようにしてある処理システムにおいて、前記複数の処理装置の内の一の処理装置は、他の処理装置の内の特定の処理装置での計時の要否を判断する判断手段と、該判断手段が要と判断した場合、前記特定の処理装置へ指定時間の計時依頼を出力する手段とを備え、前記特定の処理装置は、前記計時依頼を受け付ける手段を備え、依頼された指定時間を計時手段により計時するようにしてあり、前記指定時間が経過した場合、前記一の処理装置へ指定時間経過の通知を出力する手段を備えることを特徴とする。
【0010】
第2発明に係る処理システムは、前記一の処理装置は、計時手段での計時を含む自身の動作を休止する休止状態へ移行する手段を備え、計時依頼を出力後、休止状態へ移行するようにしてあることを特徴とする。
【0011】
第3発明に係る処理システムは、前記一の処理装置は、自身が休止状態へ移行するか否かを判断する休止判断手段を備え、前記判断手段は、前記休止判断手段が休止状態へ移行すると判断したときに前記特定の処理装置へ計時依頼を出力するようにしてあることを特徴とする。
【0012】
第4発明に係る処理システムは、前記複数の処理装置は、車両に搭載されており、前記休止判断手段は、イグニッションスイッチのオフを検知した場合に、休止状態へ移行すると判断し、前記特定の処理装置へ計時依頼を出力するようにしてあることを特徴とする。
【0013】
第5発明に係る処理システムは、前記一の処理装置は、他から任意の入力を受けた場合に、休止状態から非休止状態へ移行するようにしてあり、前記一の処理装置は、前記特定の処理装置からの指定時間経過の通知以外で非休止状態へ移行した場合、計時中止の通知を前記特定の処理装置へ出力する手段を備えることを特徴とする。
【0014】
第6発明に係る処理システムは、前記特定の処理装置は、前記計時依頼を受け付けた場合、前記一の処理装置へ応答を出力する手段を備え、前記一の処理装置は、前記応答を受け付ける手段を備え、前記応答がない場合、休止状態への移行を中止するようにしてあることを特徴とする。
【0015】
第7発明に係る処理システムは、前記一の処理装置は、クロック周波数が異なる複数の計時手段を備え、クロック周波数がより高い計時手段による計時を停止させる際に、前記判断手段により前記特定の処理装置での計時を要と判断するようにしてあることを特徴とする。
【0016】
第8発明に係る処理システムは、前記複数の処理装置は、車両に搭載されており、前記処理装置は、車両状況情報を取得する手段と、取得した車両状況情報に基づき指定時間を算出する手段とを備えることを特徴とする。
【0017】
第1発明では、各々計時手段を備えて信号処理を行なう処理装置の内、一の処理装置にて特定の処理装置での計時が要と判断された場合、前記一の処理装置から特定の処理装置へ指定時間と共に計時依頼が出力され、特定の処理装置では計時依頼に応じて計時がなされて、指定時間が経過した場合に、依頼元の一の処理装置へ通知がなされる。これにより、一の処理装置では特定の処理装置で計時が代替されている間に、計時手段による計時を停止することが可能である。
【0018】
第2発明では、特定の処理装置に計時の代替を依頼した一の処理装置は、計時依頼を出力した後は、任意のタイミングで、計時手段での計時を含む自身の動作を休止する休止状態へ移行することが可能である。
【0019】
第3発明では、一の処理装置が、自身が休止状態へ移行すべきと判断した時点で、特定の処理装置で以後の計時を行なわれるべく計時依頼が出力される。第1発明又は第2発明では、特定の処理装置での計時依頼がされたとしても、一の処理装置で必ず休止状態へ移行するとは限らなかったところ、第3発明では、自身が休止状態へ移行する場合は計時の代替処理が必要であると判断されて計時依頼が出力される。
【0020】
第4発明では、処理システムは車両に搭載されており、イグニッションスイッチがオフとなって特定の処理装置以外の処理装置が休止状態へ移行する際に、計時が必要な一の処理装置から特定の処理装置へ計時依頼が出力される。車両の制御システムなどの処理システムに、監視機能のために計時を持続する特定の処理装置が存在する場合、当該特定の処理装置にて計時が肩代わりされる。これにより、車両の制御システムで効果的に消費電力を低減させることが可能である。
【0021】
第5発明では、処理装置は休止状態にある場合でも他の装置から信号の出力を受けた場合に非休止状態へ移行して処理を開始する。特定の処理装置から指定時間経過の通知の出力を受けた場合もこれを契機に非休止状態へ移行する。ただし、特定の処理装置へ計時依頼を出力して休止状態へ移行していた一の処理装置が、他の出力を受けて非休止状態へ移行し、特定の処理装置での計時が不要となった場合は、特定の処理装置へ計時中止の通知が出力される。これにより、特定の処理装置では、代替して行なう計時を中止でき、不要な処理が行なわれることを回避して処理負荷を軽減させることができる。
【0022】
第6発明では、特定の処理装置は、依頼元の一の処理装置から計時依頼を受け付けた場合に応答を出力し、一の処理装置では、特定の処理装置から応答が無い場合には、計時の代替がされないことを認識することが可能である。この場合、不要に休止状態へ移行して計時がされなくなることを回避することが可能である。
【0023】
第7発明では、一の処理装置はクロック周波数が異なる複数の計時手段を備え、周波数が高い計時手段による計時について、特定の処理装置で代替させるべく計時を依頼する。非休止状態及び休止状態のいずれかのみならず、複数段階で消費電力を節減する状態へ移行する処理装置でも、高精度での計時を他の特定の処理装置にて代替させることで休止状態でなくとも、消費電力を低減させることが可能である。
【0024】
第8発明では、一の処理装置が特定の処理装置に計時を依頼する指定時間は、処理システムが搭載される車両の状況に応じて算出される。これにより、車両状況に応じて柔軟に処理システム全体では機能を落すことなく有効に消費電力を低減させることができる。
【発明の効果】
【0025】
本発明による場合、他の処理装置で代替して計時を行なっている間、一の処理装置では計時手段を停止させることが可能であるから、一の処理装置は任意のタイミングでその後、休止状態(スリープ状態)へ移行でき、有効に消費電力を低減させることができる。処理システム内にシステム状況などを常時的に監視するなどの計時を行なう特定の処理装置が存在する場合、当該特定の処理装置に計時を代替させることにより、他の処理装置は有効に計時を停止して省電力状態へ移行できる。このとき、消費電力が少ない低精度での計時さえも停止させることができるので更に消費電力を低減することができる。
【図面の簡単な説明】
【0026】
【図1】実施の形態1における車載制御システムの構成の一部を示すブロック図である。
【図2】実施の形態1における電源管理ECUからボディECUへ計時依頼がされる場合の処理手順の一例を示すフローチャートである。
【図3】実施の形態2における電源管理ECUからボディECUへ計時依頼がされる場合の処理手順の一例を示すフローチャートである。
【図4】実施の形態3における電源管理ECUからボディECUへ計時依頼がされる場合の処理手順の一例を示すフローチャートである。
【図5】実施の形態4における車載制御システムの構成の一部を示すブロック図である。
【図6】実施の形態4における電源管理ECUからボディECUへ計時依頼がされる場合の処理手順の一例を示すフローチャートである。
【図7】実施の形態5における電源管理ECUからボディECUへ計時依頼がされる場合の処理手順の一例を示すフローチャートである。
【発明を実施するための形態】
【0027】
以下、本発明をその実施の形態を示す図面に基づいて具体的に説明する。
【0028】
なお、以下に示す実施の形態では、本発明に係る処理システムを車両に搭載されて種々の制御を行なうECU(Electronic Control Unit)を含む車載制御システムに適用した例を示す。
【0029】
(実施の形態1)
図1は、実施の形態1における車載制御システムの構成の一部を示すブロック図である。車載制御システムは、電源管理ECU1及びボディECU2と、車載ネットワーク3とを含む。車載制御システムは、図1に示す電源管理ECU1及びボディECU2以外のECU、各種アクチュエータ、センサなどを含むことは言うまでもない。
【0030】
電源管理ECU1は、バッテリ残量を監視し、バッテリ上がりを防止するための処理、電力分配の効率化処理などを実現するECUである。ボディECU2は、ボディ系の各センサから出力される情報を用いてドアロック、ヘッドライト、ワイパーなどのボディ系のアクチュエータの動作を制御するECUである。本実施の形態におけるボディECU2は特に、セキュリティセンサ4と接続され、エンジン停止中でも車両の内外状況を監視して盗難、いたずらなどを防止する機能を実現する。
【0031】
電源管理ECU1は、CPU11、ROM(Read Only Memory)12、RAM(Random Access Memory)13、I/O(Input/Output)14、通信部15、計時部16を含むマイクロコンピュータ(以下、マイコン)10を備える。
【0032】
CPU11は、ROM12に記憶されている制御プログラムを読み出して実行することにより、マイコン10を電源管理処理を行なうハードウェアとして動作させ、接続されるバッテリ、オルタネータなどから得られる信号に基づく処理を行なう。例えば、電源管理ECU1のマイコン10は、バッテリの駆動が停止してからの期間を測定し、所定時間を経過した場合にはバッテリ上がりを警告する処理を行なうなどの処理を実現する。
【0033】
ROM12は、フラッシュメモリ、マスクROM、EPROM(Erasable Programmable ROM)、又はEEPROM(Electrically Erasable Programmable ROM)等の不揮発性メモリを利用する。ROM12には、CPU11が読み出して実行する制御プログラム、または電源管理処理を行なうための各種情報が記憶されている。
【0034】
RAM13は、SRAM(Static Random Access Memory)又はDRAM(Dynamic Random Access Memory)等のデータの書き換えが可能で且つ高速にアクセスすることが可能なメモリを利用する。RAM13には、CPU11にて実行される各種プログラムが読み出されて記憶されると共に、CPU11による演算処理の過程で発生するデータが一時的に記憶される。
【0035】
I/O14は、外部からの信号入力を受け付けると共に、外部への信号出力を実現する複数の端子を含むインタフェースである。A/D変換、D/A変換機能を有している構成としてもよい。I/O14には、バッテリ又はオルタネータなどの動作状態を検知するセンサが接続される。
【0036】
通信部15は、ネットワークコントローラ機能を有し、マイコン10による車載ネットワーク3における通信を実現する。通信部15は具体的に、CAN(Control Area Network)、LIN(Local Interconnect Network)、又はFlexRayなどのプロトコルに準じたネットワークコントローラを用い、CPU11から与えられるデータをプロトコルに準じた信号へ変換して車載ネットワーク3へ出力する。なお、物理層での送受信を実現するトランシーバは図示を省略する。
【0037】
計時部16は、水晶振動子、セラミック振動子などのクロック17と、クロック17からのクロック信号を計数して時間を測定するカウンタ18とを含む。計時部16は、クロック17からの所定の周波数のクロック信号を、CPU11等のマイコン10の各構成部へ出力する。実施の形態1における電源管理ECU1のクロック17は、例えば32KHzのクロック信号を出力する。マイコン10の各構成部は、計時部16から出力されるクロック信号に同期して処理を行なう。なお、計時部16はマイコン10外部に備えられる構成としてもよい。
【0038】
ボディECU2は、CPU21、ROM22、RAM23、シリアル通信部24、通信部25、計時部26を含むマイクロコンピュータ(以下、マイコン)20を備える。図1では、マイコン20のI/Oの図示を省略しているが、I/Oにより各種アクチュエータ、センサなどと接続されていてもよい。
【0039】
CPU21は、ROM22に記憶されている制御プログラムを読み出して実行することにより、マイコン20をボディ系の各種アクチュエータの動作を制御するハードウェアとして動作させる。
【0040】
ROM22は、フラッシュメモリ、マスクROM、EPROM、EEPROM等の不揮発性メモリを利用する。ROM22にはCPU21が読み出して実行する制御プログラム、又は制御に用いる各種情報が記憶されている。
【0041】
RAM23は、SRAM又はDRAM等のメモリを利用する。RAM23には、CPU21にて実行される各種プログラムが読み出されて記憶されると共に、CPU21による演算処理の過程で発生するデータが一時的に記憶される。
【0042】
シリアル通信部24は、図1中のセキュリティセンサ4などのセンサまたは他の装置などとのシリアル通信を実現する。なお、シリアル通信部24におけるシリアル通信では、後述する計時部26からのクロック信号が必要である。セキュリティセンサ4は、特にエンジン停止中に車両の内外の状況を監視して情報をボディECU2へ通知する。したがって、エンジン停止中でもシリアル通信部24は、通信が可能なように待機する。
【0043】
通信部25は、ネットワークコントローラ機能を有し、マイコン20による車載ネットワーク3における通信を実現する。電源管理ECU1の通信部15同様に、データを所定のプロトコルの信号に変換して出力する。ボディECU2は、通信部25により、車載ネットワーク3を介して電源管理ECU1と通信が可能である。
【0044】
計時部26は、水晶振動子、セラミック振動子などのクロック27と、クロック27からのクロック信号を計数して時間を測定するカウンタ28とを含む。計時部26は、クロック27からの所定の周波数のクロック信号をCPU21等のマイコン20の各構成部へ出力する。実施の形態1におけるボディECU2のクロック27は、例えば4MHzのクロック信号を出力する。マイコン20の各構成部は、計時部26から出力されるクロック信号に同期して処理を行なう。特に、上述したようにシリアル通信部24は、計時部26から出力される4MHzのクロック信号に同期して通信信号を送受信する。なお、計時部26はマイコン20外部に備えられる構成としてもよい。更に、CPU21、ROM22、RAM23等では低周波数のクロック信号に同期して処理を行なうために、クロック信号を分波して一方を低周波数のクロック信号へ変換する周波数変換部を備えてもよい。
【0045】
このように構成される車載制御システムにおいて、電源管理ECU1のマイコン10は、電源管理処理の内のバッテリ上がりを防止する処理として、エンジンが停止した場合などオルタネータからの充電が停止してから所定時間が経過したとき、バッテリ残量が維持されるように他の機器の電力消費を停止させるか、ユーザへの警告処理などを行なう。このときマイコン10は、計時部16におけるカウンタ18にて、前記所定時間が経過したか否かを監視させてもよい。しかしながら、エンジン停止中は当該所定時間が経過したか否かの処理、即ち所定時間の計時処理以外の処理は行なわずともよくなる。
【0046】
一方、ボディECU2では、エンジン停止中であっても、セキュリティセンサ4からの情報を受けるために、シリアル通信部24を含む各構成部の動作を継続する。したがって、計時部26からのクロック信号の出力は継続され、計時部26における計時も可能である。
【0047】
そこで、実施の形態1における車載制御システムでは、電源管理ECU1は、計時処理を高精度のクロック27を備えるボディECU2へ依頼し、自身はスリープ状態(休止状態)への移行が可能な状態となるようにする。ボディECU2では、依頼に応じて計時部26にて計時を肩代わりし、電源管理ECU1から指定された時間が経過した場合に、電源管理ECU1へ通知する。
【0048】
以下、フローチャートを参照して、電源管理ECU1のマイコン10及びボディECU2のマイコン20による処理の詳細を説明する。
【0049】
図2は、実施の形態1における電源管理ECU1からボディECU2へ計時依頼がされる場合の処理手順の一例を示すフローチャートである。
【0050】
電源管理ECU1のCPU11は、高精度のクロック27を備えた特定の処理装置であるボディECU2での計時の要否を判断する(ステップS1)。詳細には、CPU11はバッテリ残量を監視する処理を行なっており、残量が所定量未満となった場合、以後バッテリ残量に応じた所定の時間が経過したときにバッテリ上がりの発生が推測されることから、前記所定の時間の計時を要と判断する。このとき、所定の時間は例えば20日間である。20日間等の期間を計時するには、クロックの精度が高精度であることが望まれる。期間が長いために誤差の影響が非常に大きくなるからである。また、ステップS1では、CPU11はエンジンが停止されたか、バッテリからの電源供給が停止されたかなどを監視しており、エンジンが停止され且つアクセサリもオフとなってバッテリからの電源供給が停止された場合に、計時を要と判断するようにしてもよい。
【0051】
CPU11は、ボディECU2での計時を不要と判断した場合(S1:NO)、処理をステップS1へ戻す。
【0052】
CPU11は、ボディECU2での計時を要と判断した場合(S1:YES)、バッテリ残量などの車両の電源状況に基づき、計時する時間を算出する(ステップS2)。なお、ステップS2は必須ではなく、CPU11は車両の状況に関わらず、ROM12に記憶してある時間を読み出す処理を行なう構成としてもよい。
【0053】
CPU11は、ステップS2にて算出した時間を指定時間として、計時依頼をボディECU2へ通信部15により送信する(ステップS3)。CPU11は、計時依頼を送信した後はアイドル状態へ移行し、マイコン10がスリープ状態への移行が可能な状態へ遷移する。CPU11は、以後、車載ネットワーク3に接続されている他のECUと共に、車載ネットワーク3を介してスリープ状態への移行指示を受信したか否かを判断し(ステップS4)、移行指示を受信したと判断した場合は(S4:YES)、計時部16のクロック17を停止し、マイコン10はスリープ状態へ移行する(ステップS5)。CPU11は、スリープ状態への移行指示を受信していないと判断した場合(S4:NO)、処理をステップS4へ戻す。このとき、他のECUからのメッセージが通信部15により受信された場合など、アイドル状態から稼働状態へ移行して電源管理処理を持続する。
【0054】
電源管理ECU1から計時依頼が送信されたボディECU2では、CPU21が通信部25により計時依頼を受信する(ステップS6)。CPU21は、受信した計時依頼に含まれる指定時間を抽出し(ステップS7)、前記指定時間の計時を計時部26のカウンタ28により開始する(ステップS8)。
【0055】
CPU21は、カウンタ28により指定時間が経過したか否かを判断し(ステップS9)、経過していないと判断した場合(S9:NO)、処理をステップS9へ戻して指定期間が経過するまで待機する。CPU21は、ステップS9にて経過したと判断した場合(S9:YES)、カウンタ28における計数を停止して計時を終了し(ステップS10)、指定時間経過の通知を通信部25により電源管理ECU1へ送信する(ステップS11)。
【0056】
電源管理ECU1のCPU10は、ステップS5にてスリープ状態へ移行している場合、ボディECU2から指定時間経過の通知が送信された場合、通信部15にてこれを受信し(ステップS12)、マイコン10はスリープ状態から起動し(ステップS13)、処理を終了する。なおこのとき、車載ネットワーク3に指定時間経過の通知が送信されるので、スリープ状態へ移行している他のECUも起動させる可能性がある。当該指定時間経過の通知では、電源管理ECU1のマイコン10のみ起動することができるように構成とすることが好ましい。具体的には、指定時間経過の通知が車載ネットワーク3を介して送信された場合、当該通知であることを検知した他のECUの通信部はマイコンへ通知しないように制御される。
【0057】
なお、電源管理ECU1のマイコン10がステップS5にてスリープ状態へ移行していない場合も、CPU11は、ステップS12のように指定時間経過の通知を受信し、指定時間が経過したときの電源管理処理、例えば、他のECUへの電源の供給を停止するか、又は警告を出力するなどの処理を実行する。
【0058】
図2に示した処理手順により、電源管理ECU1の電源管理処理の内の計時処理は継続してボディECU2で代替して行なわれるから、マイコン10が計時部16を停止してスリープ状態へ移行することができる。従来では、電源管理ECU1は、エンジン停止中などでも、バッテリ上がり防止の目的で経過時間を測定するためにクロックを停止させない構成としていた。たとえば、エンジン停止中などスリープ状態へ移行できるときでも、低精度クロックは少なくとも稼働させて経過時間の測定を行なう構成としていた。このような構成と比較して、実施の形態1における車載制御システムでは、計時処理は継続されつつも電源管理ECU1はスリープ状態へ移行することができ、効果的に消費電力を低減させることができる。
【0059】
(実施の形態2)
実施の形態2では、電源管理ECU1のマイコン10は車両のイグニッションスイッチがオフとなったことを検知し、スリープ状態へ移行する際に所定の時間の計測をボディECU2に代替させるべく計時依頼を出力する。
【0060】
実施の形態2における車載制御システムの構成は、電源管理ECU1がボディECU2へ計時依頼を出力する処理手順が異なる以外は、実施の形態1と同様である。したがって、以下、実施の形態1と共通する構成については同一の符号を付して説明を省略し、電源管理ECU1のマイコン10及びボディECU2のマイコン20による計時依頼についての処理の詳細を説明する。
【0061】
図3は、実施の形態2における電源管理ECU1からボディECU2へ計時依頼がされる場合の処理手順の一例を示すフローチャートである。なお、以下に示す処理手順の内、実施の形態1の図2に示した処理手順と共通するステップについては同一のステップ番号を付し、詳細な説明を省略する。
【0062】
電源管理ECU1のCPU11は、通信部15により車載ネットワーク3を介して受信するデータに基づき、イグニッションスイッチのオフを検知したか否かを判断する(ステップS21)。イグニッションスイッチに接続されている図示しない他のECUは、スイッチがイグニッションキーにより切り替えられた場合にこれを検知して車載ネットワークへスイッチ状態を示すデータを送信するようにしてある。CPU11は、イグニッションスイッチのオフを検知していないと判断した場合(S21:NO)、処理をステップS21へ戻す。
【0063】
CPU11は、イグニッションスイッチのオフを検知したと判断した場合(S21:YES)、自身もスリープ状態へ移行すべく、またエンジンが停止されてオルタネータからのバッテリへの充電も停止されるから、バッテリ残量に応じた所定の時間の計測が必要であると判断する(ステップS22)。
【0064】
CPU11は、計時する時間を算出し(S2)、計時依頼を送信して(S3)、計時部16のクロック17を停止させ、これによりマイコン10はスリープ状態へ移行する(S5)。
【0065】
計時依頼を電源管理ECU1から受信するボディECU2における処理(S6〜S11)、及び指定時間経過の通知を受ける電源管理ECU1の処理(S12,13)は図2のフローチャートに示した処理と同様であるので詳細な説明は省略する。
【0066】
実施の形態1では、電源管理ECU1のマイコン10がスリープ状態へ移行するか否かに関わらず、バッテリ残量などから計時が必要と判断された場合に、ボディECU2での代替処理が行なわれる構成とした。これに対し、実施の形態2では、上述のように、車載制御システムにてイグニッションスイッチがオフされたことに応じて、システム全体で小電力状態へ移行すべき場合に、電源管理ECU1のマイコン10はクロック17を停止させる。この場合も、低精度クロックは少なくとも稼働させて経過時間の測定を行なう構成と比較して、車載制御システム全体として効果的に消費電力を低減させることができる点で、優れた効果を奏する。
【0067】
(実施の形態3)
実施の形態3では、電源管理ECU1のマイコン10はアイドル状態が一定時間以上となった場合に自身がスリープ状態へ移行すべきと判断してスリープ状態へ移行すると共に計時依頼を送信する。更に、実施の形態3ではボディECU2から指定時間経過の通知を受けること以外を契機に起動し、指定時間の計測が不要となった場合にボディECU2での計時を中止させる。
【0068】
実施の形態3における車載制御システムの構成は、電源管理ECU1がボディECU2へ計時依頼を出力する処理手順が異なる以外は、実施の形態1と同様である。したがって、以下、実施の形態1と共通する構成については同一の符号を付して説明を省略し、電源管理ECU1のマイコン10及びボディECU2のマイコン20による計時依頼についての処理の詳細を説明する。
【0069】
図4は、実施の形態3における電源管理ECU1からボディECU2へ計時依頼がされる場合の処理手順の一例を示すフローチャートである。なお、以下に示す処理手順の内、実施の形態1の図2に示した処理手順と共通するステップについては同一のステップ番号を付し、詳細な説明を省略する。
【0070】
電源管理ECU1のCPU11は、マイコン10のI/O14における入出力がないアイドル状態が所定時間以上継続しているか否かを判断する(ステップS31)。ステップS31の処理は、マイコン10がスリープ状態へ移行するか否かの判断の一例である。スリープ状態へ移行するか否かの判断が可能であれば、アイドル状態が所定時間以上継続しているか否かの判断には限られない。明示的に他の装置からスリープ状態への移行指示があった場合に、スリープ状態へ移行すると判断してもよい。
【0071】
CPU11は、アイドル状態は所定時間未満であると判断した場合(S31:NO)、処理をステップS31へ戻す。
【0072】
CPU11は、アイドル状態が所定時間以上継続していると判断した場合(S31:YES)、スリープ状態へ移行すべく、またエンジンが停止されてオルタネータからのバッテリへの充電も停止されるから、バッテリ残量に応じた所定の時間の計測が必要であると判断する(ステップS32)。
【0073】
CPU11は、計時する時間を算出し(S2)、計時依頼を送信して(S3)、計時部16のクロック17を停止させる、これによりマイコン10はスリープ状態へ移行する(S5)。
【0074】
ボディECU2のCPU21は、通信部25により計時依頼を受信し(S6)、指定時間を抽出して(S7)、計時を開始し(S8)、指定時間が経過したか否か判断する(S9)。
【0075】
このとき電源管理ECU1では、CPU11は、スリープ状態へ移行した後、I/O14に外部からの入力を受け付けて起動されたか否かを判断する(ステップS33)。マイコン10は、外部からの入力をI/O14から受け付けた場合、稼働状態へ起動するようにしてある。なお、通信部15により指定時間結果の通知以外でも特定のデータ、例えばイグニッションスイッチがスタートとなったことを示すデータを受信した場合などに起動してもよい。
【0076】
CPU11は、外部から起動されない場合は(S33:NO)、そのままスリープ状態である。CPU11は、起動されたと判断した場合(S33:YES)、計時依頼中止をボディECU2へ通信部15により送信する(ステップS34)。電源管理ECU1が起動して、バッテリへの充電も開始されてバッテリ上がりが予想される所定時間の経過を測定する必要がなくなった場合に、ボディECU2での不要な処理を停止させるためである。
【0077】
一方でボディECU2のCPU21は、計時依頼中止が送信される場合に対応して、計時を開始した後、指定時間が経過していないと判断した場合(S9:NO)、計時依頼中止を通信部25により受信したか否かを判断する(ステップS35)。CPU21は、指定時間も経過せず、計時依頼中止も受信していないと判断した場合(S35:NO)、処理をステップS9へ戻し、指定時間が経過するか、計時依頼中止を受信するまで待機する。
【0078】
CPU21は、計時依頼中止を受信する前にステップS9で指定時間が経過したと判断した場合は(S9:YES)、計時を終了して(S10)、指定時間経過の通知を送信し(S15)、処理を終了する。この場合の電源管理ECU1が指定時間経過の通知を受信し場合の処理は、実施の形態1の図2のフローチャートの説明で示した。
【0079】
CPU21は、指定時間が経過する前に、電源管理ECU1から計時依頼中止を受信したと判断した場合(S35:YES)、CPU21は、カウンタ28における計数を停止して計時を終了し(ステップS36)、処理を終了する。
【0080】
このように実施の形態3では、電源管理ECU1にてアイドル状態が続いて一旦、ボディECU2での計時が必要と判断されて、計時依頼が送信された後でも、指定時間が経過する前に、以後の計時が不要と判断された場合には、無駄にボディECU2で計時処理が継続されることがない。したがって、車載制御システムにおけるスリープ状態への移行を効果的としつつも、計時を肩代わりするボディECU2での処理負荷を軽減することができる。
【0081】
(実施の形態4)
実施の形態1乃至3では、電源管理ECU1は、低精度のクロック17のみを備え、ボディECU2へ計時を依頼した後はスリープ状態へ移行して、自身の動作を休止する構成とした。実施の形態4では、電源管理ECUは、低精度のクロックのみならず高精度のクロックをも備え、計時を依頼した後は、高精度のクロックの動作のみ不要として停止させ、スリープ状態ではないものの、消費電力が少ない省電力状態へ移行する構成とする。
【0082】
図5は、実施の形態4における車載制御システムの構成の一部を示すブロック図である。実施の形態4における車載制御システムの構成は、クロック周波数が異なる複数のクロックを備える電源管理ECU5であること、及び電源管理ECU5における省電力状態への移行処理が異なること以外、ボディECU2の内部構成などは実施の形態1の構成と同様である。したがって、以下の説明では、実施の形態1の構成と共通する部分については同一の符号を付して詳細な説明を省略する。
【0083】
電源管理ECU5は、実施の形態1の電源管理ECU1同様に、CPU51、ROM52、RAM53、I/O54、通信部55、計時部56を含むマイコン50を備える。マイコン50の構成部の内、計時部56の構成以外は、実施の形態1の電源管理ECU1の各構成部と同様であるので詳細な説明は省略する。
【0084】
実施の形態4の電源管理ECU5のマイコン50は、計時部56に、周波数が異なる複数のクロック57,58を備える。クロック57,58は、水晶振動子、セラミック振動子などを用いる。一方のクロック57は例えば、32KHzのクロック信号を出力するようにしてあり、他方のクロック58は、4MHzのクロック信号を出力するようにしてある。また、計時部56に、クロック57,58のいずれかから出力されるクロック信号を計数して時間を測定するカウンタ59を含む。
【0085】
マイコン50の構成部は基本的に、低周波数のクロック信号を出力する低精度のクロック57から出力されるクロック信号に同期して処理を行なう。ただし、高速な処理を行なうことが必要な場合、また、特に動作中に高精度の計時が必要な場合は高周波数のクロック信号を出力する高精度のクロック58から出力されるクロック信号を用いる。例えば、マイコン50のCPU51は、バッテリ残量を監視する処理を行なっており、残量が所定量未満となった場合、以後バッテリ残量に応じた所定の時間が経過したときにバッテリ上がりの発生が推測されることから、前記所定の時間の計時を行なう。このとき、所定の時間は例えば20日間である。20日間等の期間を計時するには、クロックの精度が高精度であることが望まれるから、当該期間を計時する場合にはマイコン50は、クロック58からのクロック信号を用いてカウンタ59にて計時する。
【0086】
ただし、実施の形態1乃至3に示したように、電源管理ECU5が、エンジン停止中などに、所定の時間の経過を測定する処理のみを行なう場合をもクロック58を依然として動作させる構成では、エンジン停止中にも拘わらず、電源管理ECU5は通常同様の消費電力を消費する。この場合、省電力化は効果的でない。
【0087】
したがって、実施の形態4でも、エンジンが停止されるなどの状況で、バッテリ上がりを防止するための所定の時間の計時が必要な場合には、自身の計時部56の代わりに、所定の時間の計時を、高精度のクロック27を備えるボディECU2にて行なわれるべく、ボディECU2へ計時依頼を送信する。
【0088】
以下、電源管理ECU5のマイコン50及びボディECU2のマイコン20による処理の詳細を説明する。
【0089】
図6は、実施の形態4における電源管理ECU5からボディECU2へ計時依頼がされる場合の処理手順の一例を示すフローチャートである。なお、以下に示す処理手順の内、実施の形態1の図2に示した処理手順と共通するボディECU2における処理手順については同一のステップ番号を付し、詳細な説明を省略する。
【0090】
電源管理ECU5のCPU51は、自身が省電力状態へ移行するか否かを判断する(ステップS41)。ステップS41は具体的には、アイドル状態が所定時間以上継続した場合、イグニッションスイッチのオフが検知された場合、また車載ネットワーク3に接続される他の装置から明示的に省電力状態への移行が指示された場合に、省電力状態へ移行すると判断する。
【0091】
CPU51は、省電力状態へ移行しないと判断した場合(S41:NO)、処理をステップS41へ戻す。CPU51は、省電力状態へ移行すると判断した場合(S41:YES)、自身の計時部56の代わりにボディECU2における計時が要と判断する(ステップS42)。
【0092】
CPU51は、以後、計時する時間を算出し(ステップS43)、算出した時間を指定時間として、計時依頼をボディECU2へ通信部35により送信する(ステップS44)。なお、算出する時間は、現在計時中であれば残時間が算出されてもよいし、改めてバッテリ残量などの車両の電源状況に基づき、計時する時間を算出してもよい。なお、ステップS43の算出は必須でなく、CPU51は車両の状況に関わらず、ROM52に記憶してある時間を読み出す処理を行なう構成としてもよい。
【0093】
次にCPU51は、計時依頼を送信した後は、高精度のクロック58を停止させ(ステップS45)、低精度のクロック57から出力されるクロック信号に基づき処理を行なう。これにより、電源管理ECU5の消費電力は、クロック58の分だけ低減されて省電力状態へ移行される。
【0094】
ボディECU2では、CPU21が計時依頼を受信し(S6)、指定時間を抽出し(S7)、指定時間の計時を開始し(S8)、指定時間が経過した場合に(S9:YES)、計時を終了し(S10)、指定時間経過の通知を電源管理ECU5へ送信する(S11)。
【0095】
電源管理ECU5のCPU51は、ボディECU2から送信された指定時間経過の通知を受信し(ステップS46)、高精度のクロック58を起動して(ステップS47)、処理を終了する。このときマイコン50は省電力状態から稼働状態へ戻り、指定時間が経過したときの電源管理処理、例えば、他のECUへの電源の供給を停止するか、又は警告を出力するなどの処理を実行する。
【0096】
なお、実施の形態4でも、車載ネットワーク3に指定時間経過の通知が送信されるときには、省電力状態又はスリープ状態へ移行している他のECUも起動させる可能性がある。当該指定時間経過の通知では、電源管理ECU5による電源管理処理が稼働すればよいから、マイコン50のみ起動することができるように構成とすることが好ましい。具体的には、指定時間経過の通知が車載ネットワーク3を介して送信された場合、当該通知であることを検知した他のECUの通信部はマイコンへ通知しないように制御される。
【0097】
このような処理手順により、電源管理ECU5の電源管理処理の内、エンジンが停止されている間での高精度計時処理は、ボディECU2で代替して行なわれるから、マイコン50の計時部56における高精度のクロック58、即ち消費電力が多いクロック58が停止し続ける省電力状態へ移行することができる。従来では、電源管理ECU1は、エンジン停止中などでも、バッテリ上がり防止の目的で経過時間を測定するために低精度のクロック57により計時し、間欠的に高精度のクロック58を起動して誤差を補正するなどの処理が行なわれていた。このような構成と比較して、実施の形態4における車載制御システムでは、計時処理は継続されつつも消費電力が多いクロック58は代替されている期間は完全に停止されるから、効果的に消費電力を低減させることができる。
【0098】
(実施の形態5)
実施の形態5では、電源管理ECU5のCPU51は、ボディECU2へ計時依頼を送信した場合に、ボディECU2から応答がないときには計時依頼ができないことを認識し、省電力状態へ移行せずに自身の計時部56による計時を続行する。
【0099】
実施の形態5における車載制御システムの構成は、電源管理ECU1がボディECU2へ計時依頼を出力する処理手順が異なる以外は、実施の形態4と同様である。したがって、以下、実施の形態4と共通する構成については同一の符号を付して説明を省略し、電源管理ECU5のマイコン50及びボディECU2のマイコン20による計時依頼についての処理の詳細を説明する。
【0100】
図7は、実施の形態5における電源管理ECU5からボディECU2へ計時依頼がされる場合の処理手順の一例を示すフローチャートである。なお、以下に示す処理手順の内、実施の形態4の図6に示した処理手順と共通する処理手順については同一のステップ番号を付し、詳細な説明を省略する。
【0101】
実施の形態5におけるボディECU2では、CPU21は計時依頼を受信した場合(S6)、計時部26で代替して計時が可能か否かを判断する(ステップ51)。例えば、CPU21の処理負荷が過重である場合などは代替して計時することは不可能であると判断する。CPU21は、計時が不可能であると判断した場合(S51:NO)、そのまま処理を終了し、ボディECU2としての処理を継続する。CPU21は、代替して計時が可能であると判断した場合(S51:YES)、応答を通信部25により送信し(ステップS52)、以後、ステップS6で受信した計時依頼に対応して指定時間を抽出し(S7)、指定時間の計時を開始し(S8)、指定時間が経過した場合に(S9:YES)、計時を終了し(S10)、指定時間経過の通知を電源管理ECU5へ送信する(S11)。
【0102】
これに対して電源管理ECU5のCPU51は、計時依頼をボディECU2へ送信した後(S44)、ボディECU2からの応答を通信部55により受信したか否かを判断する(ステップS53)。このとき、CPU51は、応答を受信するまで例えば1秒などの所定時間待機するとする。
【0103】
CPU51は、ステップS53にて応答を受信したと判断した場合(S53:YES)、高精度のクロック58を停止させ(S45)、低精度のクロック57から出力されるクロック信号に基づき処理を行なう。これにより、電源管理ECU5の消費電力は、クロック58の分だけ低減されて省電力状態へ移行される。その後、ボディECU2から送信された指定時間経過の通知を受信した場合は(S46)、高精度のクロック58を起動して(S47)、処理を終了する。このときマイコン50は省電力状態から稼働状態へ戻り、指定時間が経過したときの電源管理処理、例えば、他のECUへの電源の供給を停止するか、又は警告を出力するなどの処理を実行する。
【0104】
CPU51は、ステップS53にて応答を受信しなかったと判断した場合(S53:NO)、ボディECU2での計時は不可能であったとして処理を終了し、省電力状態への移行をせずに以後、クロック58の動作を継続する。バッテリ上がり防止のための所定の時間の計時をクロック58からのクロック信号を用いて行っている場合もこれを継続する。
【0105】
このように、実施の形態5では、電源管理ECU5は、ボディECU2から応答が無い場合には、計時の代替がされないことを認識することが可能である。この場合、電源管理ECU5が不要に省電力状態へ移行して計時がされなくなることを回避することが可能である。
【0106】
上述の実施の形態1乃至5では、電源管理ECU1(又は5、以下同様)とボディECU2とは、車載ネットワーク3を介した通信により、計時依頼の送信及び所定時間経過の通知の送信を行なう構成とした。しかしながら本発明はこれに限らず、電源管理ECU1及びボディECU2は通信部15,25によらず、計時依頼のために直に信号線を介して信号を入出力する構成としてもよい。つまり、電源管理ECU1のCPU11は、通信部15によらず、計時依頼を示す信号をボディECU2へ出力し、ボディECU2も指定時間経過の通知を示す信号を電源管理ECU1へ出力する。この場合、信号の入力により電源管理ECU1のマイコン10が起動するように構成されることが好ましい。これにより、指定時間経過の通知がボディECU2から入力されることにより、電源管理ECU1のみが起動し、他のECUまでも起動することがない。
【0107】
なお、開示された実施の形態は、全ての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上述の説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味及び範囲内での全ての変更が含まれることが意図される。
【符号の説明】
【0108】
1,5 電源管理ECU(一の処理装置)
15,55 通信部
16,56 計時部(計時手段)
2 ボディECU(特定の処理装置)
25 通信部
26 計時部(計時手段)
【特許請求の範囲】
【請求項1】
計時手段による計時に基づき信号処理を行なう複数の処理装置を含み、該複数の処理装置は連携して処理を行なうようにしてある処理システムにおいて、
前記複数の処理装置の内の一の処理装置は、
他の処理装置の内の特定の処理装置での計時の要否を判断する判断手段と、
該判断手段が要と判断した場合、前記特定の処理装置へ指定時間の計時依頼を出力する手段と
を備え、
前記特定の処理装置は、
前記計時依頼を受け付ける手段を備え、依頼された指定時間を計時手段により計時するようにしてあり、
前記指定時間が経過した場合、前記一の処理装置へ指定時間経過の通知を出力する手段を備えること
を特徴とする処理システム。
【請求項2】
前記一の処理装置は、計時手段での計時を含む自身の動作を休止する休止状態へ移行する手段を備え、
計時依頼を出力後、休止状態へ移行するようにしてあること
を特徴とする請求項1に記載の処理システム。
【請求項3】
前記一の処理装置は、自身が休止状態へ移行するか否かを判断する休止判断手段を備え、
前記判断手段は、前記休止判断手段が休止状態へ移行すると判断したときに前記特定の処理装置へ計時依頼を出力するようにしてあること
を特徴とする請求項2に記載の処理システム。
【請求項4】
前記複数の処理装置は、車両に搭載されており、
前記休止判断手段は、イグニッションスイッチのオフを検知した場合に、休止状態へ移行すると判断し、前記特定の処理装置へ計時依頼を出力するようにしてあること
を特徴とする請求項3に記載の処理システム。
【請求項5】
前記一の処理装置は、他から任意の入力を受けた場合に、休止状態から非休止状態へ移行するようにしてあり、
前記一の処理装置は、前記特定の処理装置からの指定時間経過の通知以外で非休止状態へ移行した場合、計時中止の通知を前記特定の処理装置へ出力する手段を備えること
を特徴とする請求項2乃至4のいずれかに記載の処理システム。
【請求項6】
前記特定の処理装置は、
前記計時依頼を受け付けた場合、前記一の処理装置へ応答を出力する手段を備え、
前記一の処理装置は、前記応答を受け付ける手段を備え、前記応答がない場合、休止状態への移行を中止するようにしてあること
を特徴とする請求項2乃至5のいずれかに記載の処理システム。
【請求項7】
前記一の処理装置は、クロック周波数が異なる複数の計時手段を備え、
クロック周波数がより高い計時手段による計時を停止させる際に、前記判断手段により前記特定の処理装置での計時を要と判断するようにしてあること
を特徴とする請求項1に記載の処理システム。
【請求項8】
前記複数の処理装置は、車両に搭載されており、
前記処理装置は、車両状況情報を取得する手段と、
取得した車両状況情報に基づき指定時間を算出する手段と
を備えることを特徴とする請求項1乃至7のいずれかに記載の処理システム。
【請求項1】
計時手段による計時に基づき信号処理を行なう複数の処理装置を含み、該複数の処理装置は連携して処理を行なうようにしてある処理システムにおいて、
前記複数の処理装置の内の一の処理装置は、
他の処理装置の内の特定の処理装置での計時の要否を判断する判断手段と、
該判断手段が要と判断した場合、前記特定の処理装置へ指定時間の計時依頼を出力する手段と
を備え、
前記特定の処理装置は、
前記計時依頼を受け付ける手段を備え、依頼された指定時間を計時手段により計時するようにしてあり、
前記指定時間が経過した場合、前記一の処理装置へ指定時間経過の通知を出力する手段を備えること
を特徴とする処理システム。
【請求項2】
前記一の処理装置は、計時手段での計時を含む自身の動作を休止する休止状態へ移行する手段を備え、
計時依頼を出力後、休止状態へ移行するようにしてあること
を特徴とする請求項1に記載の処理システム。
【請求項3】
前記一の処理装置は、自身が休止状態へ移行するか否かを判断する休止判断手段を備え、
前記判断手段は、前記休止判断手段が休止状態へ移行すると判断したときに前記特定の処理装置へ計時依頼を出力するようにしてあること
を特徴とする請求項2に記載の処理システム。
【請求項4】
前記複数の処理装置は、車両に搭載されており、
前記休止判断手段は、イグニッションスイッチのオフを検知した場合に、休止状態へ移行すると判断し、前記特定の処理装置へ計時依頼を出力するようにしてあること
を特徴とする請求項3に記載の処理システム。
【請求項5】
前記一の処理装置は、他から任意の入力を受けた場合に、休止状態から非休止状態へ移行するようにしてあり、
前記一の処理装置は、前記特定の処理装置からの指定時間経過の通知以外で非休止状態へ移行した場合、計時中止の通知を前記特定の処理装置へ出力する手段を備えること
を特徴とする請求項2乃至4のいずれかに記載の処理システム。
【請求項6】
前記特定の処理装置は、
前記計時依頼を受け付けた場合、前記一の処理装置へ応答を出力する手段を備え、
前記一の処理装置は、前記応答を受け付ける手段を備え、前記応答がない場合、休止状態への移行を中止するようにしてあること
を特徴とする請求項2乃至5のいずれかに記載の処理システム。
【請求項7】
前記一の処理装置は、クロック周波数が異なる複数の計時手段を備え、
クロック周波数がより高い計時手段による計時を停止させる際に、前記判断手段により前記特定の処理装置での計時を要と判断するようにしてあること
を特徴とする請求項1に記載の処理システム。
【請求項8】
前記複数の処理装置は、車両に搭載されており、
前記処理装置は、車両状況情報を取得する手段と、
取得した車両状況情報に基づき指定時間を算出する手段と
を備えることを特徴とする請求項1乃至7のいずれかに記載の処理システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2010−230571(P2010−230571A)
【公開日】平成22年10月14日(2010.10.14)
【国際特許分類】
【出願番号】特願2009−80046(P2009−80046)
【出願日】平成21年3月27日(2009.3.27)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.EEPROM
【出願人】(395011665)株式会社オートネットワーク技術研究所 (2,668)
【出願人】(000183406)住友電装株式会社 (6,135)
【出願人】(000002130)住友電気工業株式会社 (12,747)
【Fターム(参考)】
【公開日】平成22年10月14日(2010.10.14)
【国際特許分類】
【出願日】平成21年3月27日(2009.3.27)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.EEPROM
【出願人】(395011665)株式会社オートネットワーク技術研究所 (2,668)
【出願人】(000183406)住友電装株式会社 (6,135)
【出願人】(000002130)住友電気工業株式会社 (12,747)
【Fターム(参考)】
[ Back to top ]