
処理装置および対象物検出装置
検出対象の接近に伴い変動する電気信号を生成するセンサ10に接続され、上記電気信号を処理する処理装置11であり、前記検出対象の接近に伴い変動する電気信号と前記電気信号よりも周波数の高い高周波信号とが重畳した信号から前記電気信号を抽出する手段7と、前記電気信号の波形から前記検出対象の接近を判定する手段8とを備える
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両、建物等への対象物の接近を検出する際の信号処理技術に関する。
【背景技術】
【0002】
近年、車両、建物等への対象物の接近を検知するセンサが注目されている。このようなセンサは、例えば、電磁波、あるいは、光の放射とその反射波の受信とにより、対象物としての人、または人体の一部(例えば、手)等の接近を検知する。このようなセンサの1つとしては、断続的な電磁波の放射により対象物を検知するインパルス式センサが知られている。
【0003】
このようなセンサにおいて、電磁波、あるいは、光等の信号を受信して処理する場合、信号成分とノイズ成分の識別が必要となる場合が多い。ノイズを信号として処理してしまうと、上記センサ等が過敏に動作し、本来存在しない対象物を存在すると誤検出するからである。
【0004】
従来から、信号成分とノイズ成分との周波数帯域の相違を利用して、様々なノイズ除去技術が提案されてきた。例えば、アナログのローパスフィルタ、ハイパスフィルタ、バンドパスフィルタ等により、信号成分とノイズ成分を分離していた。また、デジタル信号に対しては、平均値化処理により高周波ノイズを除去するものもあった。しかし、単純なアナログのフィルタ、あるいは、デジタルデータに対する平均値化処理では、完全にノイズを除去できない場合があった。すなわち、信号成分の周波数帯域とノイズの周波数帯域とが十分に分離されている場合には、単純なフィルタによっても信号とノイズを弁別可能である。しかし、信号成分の周波数帯域とノイズの周波数帯域とが近接するような場合には、その弁別が困難となる。
【0005】
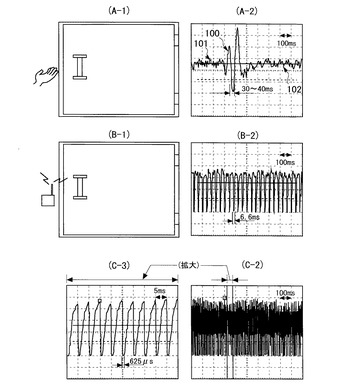
図1に、人の手の接近を検知するインパルス式センサが組み込まれたドアとセンサの検出信号例を示す。図1において、(A−1)は、このドアに人の手が接近した状態を示す。ここでは、インパルス式センサがドアの取っ手付近に組み込まれていると想定する。また、(A−2)は、(A−1)のようにこのドアに人の手が接近した場合におけるインパルス式センサの出力を示す。(A−2)に示すように、このドアに人の手が接近すると、30〜40ms程度の半値幅の山および谷からなる振動波形100が検出される。なお、振動波形100の前後の波形101および102は、各々インパルス式センサで受信される雑音である。
【0006】
図1において、(B−1)は、このドアにTDMA(Time Division Multiple Access)方式の携帯電話を接近させた状態を示す。また、(B−2)は、(B−1)のようにこのドアに携帯電話が接近した場合におけるインパルス式センサの出力を示す。典型的には、携帯電話は、1スロット6.6ms(20ms周期のフレームで1フレーム3スロット構成の場合)である。したがって、(B−2)に示すように、このような携帯電話により、幅が6.6ms程度の山または谷を有する振動波形が検出される。
【0007】
ここで、実際の携帯電話では、上記タイムスロットの間に800Mzあるいは、1.5GHz等の高周波帯域の搬送波により携帯電話と基地局との通信がなされる。そのため、そのような高周波も、受信アンテナ33から受信され、妨害波となる。しかし、そのような高周波は、人の手の接近を検出するインパルス式センサの検出信号帯域(基本波周期30〜40ms程度)と比較して十分に高周波数帯域にあり、従来のローパスフィルタ等により簡単に除去できる。そこで、図1においては、そのような高周波帯域の搬送波は省略されている(以下、(C−2)等も同様である)。
【0008】
一方、(C−2)は、携帯電話に代えてPHS(Personal Handyphone System)をこのドアに接近させた場合におけるインパルス式センサの出力を示す。また、(C−3)は、(C−2)の波形の時間軸を拡大した図である。PHSは、典型的には、1スロット625μs(5ms周期のフレームで1フレーム8スロット構成の場合)である。したがって、(C−3)に示すように、このようなPHSにより、波形の幅が625μs程度の山または谷を有する振動波形がインパルス式センサで検出される。このように、携帯電話、あるいは、PHS等の通信機器は、インパルス式センサに対して妨害波の発信源となる。
【0009】
従来、バンドパスフィルタ等により、インパルス式センサの検出信号から妨害波を除去することが一般的であった。しかし、そのようなフィルタは、妨害波の電力が小さい場合には効果を発揮しても、電力が大きい妨害波を完全には除去できない場合があった。特に、TDMA方式による携帯電話の場合、高周波数帯域の搬送波と比較してセンサ検出信号の帯域に近い低域側に、タイムスロットの切り替えに伴う振動成分が含まれる。このような振動成分は、インパルス式センサの検出信号との弁別が困難であった。
【0010】
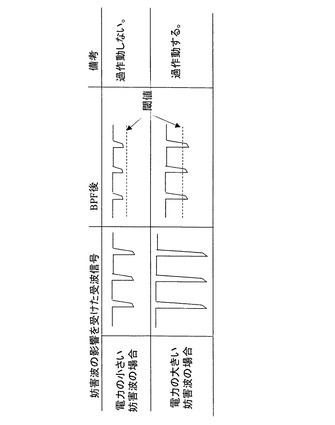
図2に、従来のバンドパスフィルタを含むインパルス式センサでの検出信号の処理結果例を示す。図2の上段は、電力の小さい妨害波が入力されたバンドパスフィルタの処理を示す。妨害波の電力が小さい場合には、バンドパスフィルタにより、妨害波が除去され、バンドパスフィルタ後の信号が閾値に達することはない。したがって、インパルス式センサの過作動(対象物が存在しないのに存在すると認識するような動作)を防止できる。
【0011】
図2の下段は、電力の大きい妨害波が入力されたバンドパスフィルタの処理を示す。妨害波の電力が大きい場合には、バンドパスフィルタにより、妨害波が完全には除去されない。その結果、バンドパスフィルタ後の信号が閾値に達する場合がある。この場合、インパルス式センサの過作動を防止できず、人が存在しないのに存在すると判定しまうことになる。以上のように、バンドパスフィルタを使用する場合には、インパルス式センサの検出信号帯域に近い帯域の妨害波によるインパルス式センサの過作動を完全には防止できない。
【0012】
このような問題に対する対策として、信号処理の対象となる装置に特有のノイズ除去方法が提案されてきた。例えば、通信機器向けのノイズブランカ回路において、妨害波が入力されたとき、受信部の出力を止め、妨害波による悪影響を抑制する技術が提案されている(特許文献1参照)。
【0013】
しかし、従来の技術においては、以下のような問題があった。
(1)上記ノイズブランカ回路をセンサ回路に適用した場合には、ノイズブランカ動作の間、センサの検知動作が停止することになる。すなわち、検知したい事象以外の事象に対してセンサが反応する過動作を抑制できる反面、検知すべき事象を検知しない不動作が発生する。
(2)回路構成が複雑である。したがって、小型化、低電力化が困難であり、利用用途が限定される。
【特許文献1】実開平6−52237号公報
【発明の開示】
【発明が解決しようとする課題】
【0014】
そこで、本発明では、検出対象の接近を検知するセンサの信号特性に着目し、上記従来技術の問題を解決する信号処理技術を提案する。すなわち、本発明の目的は、電磁波、あるいは、光の放射とその反射波の受信により検出対象の接近を検知するセンサにおいて、センサの検出信号に近接した帯域のノイズであっても簡易確実に除去できる技術を提供することにある。
【課題を解決するための手段】
【0015】
本発明は、検出対象の接近に伴い変動する電気信号を生成するセンサに接続され、上記電気信号を処理する処理装置であり、前記検出対象の接近に伴い変動する電気信号と前記電気信号よりも周波数の高い高周波信号とが重畳した信号から前記電気信号を抽出する手段と、前記電気信号の波形から前記検出対象の接近を判定する手段とを備えるものである。
【0016】
この処理装置は、前記検出対象の接近に伴い変動する電気信号と前記電気信号よりも周波数の高い高周波信号とが重畳した信号から前記電気信号を抽出し、前記電気信号の波形から前記検出対象の接近を判定するので、前記高周波信号の影響を除去して検出対象の接近を判定できる。
【0017】
また、本発明は、検出対象の接近に伴い変動する電気信号を生成するセンサと、前記検出対象の接近に伴い変動する電気信号と前記電気信号よりも周波数の高い高周波信号とが重畳した信号から前記電気信号を抽出する手段と、前記電気信号の波形から前記検出対象の接近を判定する手段とを備える対象物検出装置であってもよい。
【0018】
好ましくは、上記センサは、所定の時間間隔でインパルス信号を生成する生成部と、上記インパルス信号を放射する放射部と、上記放射されたインパルス信号が検出対象により反射された反射信号を受信する受信部と、上記インパルス信号と上記反射信号とにより変動する電気信号を生成する検波部とを有するものでもよい。
【0019】
好ましくは、上記放射部は、電磁波または光によりインパルス信号を放射し、上記受信部は、電磁波または光の反射信号を受信するものでもよい。
【0020】
前記センサは、建物の出入り口の開閉操作手段、車両の乗降口の開閉操作手段、船舶の乗降口の開閉操作手段、旅客運搬手段の乗降口の開閉操作手段、輸送手段の出入り口の開閉操作手段、または、所定の操作対象物を操作する操作手段の内部に埋め込まれている構成としてもよい。また、前記センサは、建物の出入り口の開閉機能を提供する操作手段が設置される出入り口開閉部外壁内、車両の乗降口の開閉操作手段が設置される乗降口開閉部外壁内、船舶の乗降口の開閉操作手段が設置される乗降口開閉部外壁内、旅客運搬手段の乗降口の開閉機能を提供する操作手段が設置される乗降口開閉部外壁内、輸送手段の出入り口の開閉機能を提供する操作手段が設置される出入り口開閉部外壁内、または、所定の操作対象物を操作する機能を提供する操作手段が設置される筐体内に設けられている構成としてもよい。
【0021】
センサが、これらの開閉操作手段等、これらの開閉操作手段が設置される外壁内、または筐体等に設置されることで、これらの開閉操作手段を操作しようとする検出対象の接近を確実に検知できる。
【発明の効果】
【0022】
本発明によれば、電磁波、あるいは、光の放射とその反射波の受信により検出対象の接近を検知するセンサにおいて、センサの検出信号帯域に近接する帯域のノイズを簡易確実に除去することができる。
【図面の簡単な説明】
【0023】
【図1】インパルス式センサが組み込まれたドアとセンサの検出信号を示す図
【図2】従来のバンドパスフィルタの処理結果の例を示す図
【図3】本発明の一実施形態の原理を示す図
【図4】インパルス式センサの原理的構成図
【図5】実施例1に係るインパルス式センサの構成図
【図6】インパルス式センサの検出信号を二値化積分ユニットで処理する処理例
【図7】実施例2に係るインパルス式センサの構成図
【図8】実施例2に係る接近物体有無判定部で実行される処理のフローチャート
【図9】Vth1と継続時間の関係を示す図
【図10】インパルス式センサを押しボタンスイッチの突起内に収容した例を示す図
【図11】インパルス式センサをドアハンドル内に収容した例を示す図
【図12】インパルス式センサをドアハンドル背面のドア内に収容した例を示す図
【図13】インパルス式センサを適用するドアハンドルの例
【符号の説明】
【0024】
10 インパルス式センサ
11 センサ回路
1 局部発振器
2 インパルス生成部
3 検波部
4 閾値判定部
5 二値化処理部
6 積分処理部
32 送信アンテナ
33 受信アンテナ
【発明を実施するための最良の形態】
【0025】
以下、図面を参照して本発明を実施するための最良の形態について説明する。以下に示す実施の形態の構成は例示であり、本発明は実施の形態の構成に限定されない。
【0026】
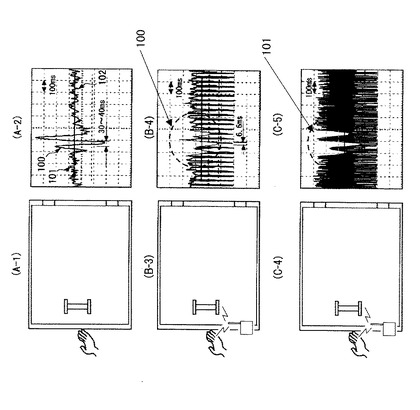
図3は、本実施形態の原理を示す図であり、図4は、本実施形態に係るインパルス式センサ10の原理的構成図である。図3において、(A−1)および(A−2)は、図1に示したものと同様であり、インパルス式センサが組み込まれたドアとセンサの検出信号例である。
【0027】
このようなインパルス式センサにTDMA方式の携帯電話、PHSが接近した場合、(A−2)の手の接近よる検出信号に重畳して、すでに述べたようなタイムスロットの切替に伴う振動成分がノイズとなって検出される。
【0028】
(B−4)では、円100付近に高周波のノイズ(約6.6msを1スロットする20msの周期)に重畳した手の接近による検出信号(数十ms程度の周期)が示されている。また、(C−5)では、円101付近に高周波のノイズ(約625μsを1スロットとする5msの周期)に重畳した手の接近による検出信号が示されている。このように、インパルス式センサの周囲に携帯電話、PHS等の高周波の発生体が存在した場合、インパルス式センサが手の接近を検出したときは、手の接近による比較的低周波の検出信号が高周波のノイズ上側(ないし下側)の包絡線の変化として現れることになる。
【0029】
したがって、このような高周波のノイズが存在する環境であっても、手の接近に伴う低周波の検出信号を分離し抽出できれば、インパルス式センサで手の接近を正確に検知できる。
【0030】
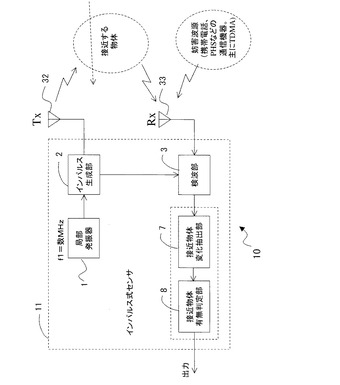
図4に示すように、このインパルス式センサ10は、センサ回路11と、送信アンテナ32と、受信アンテナ33とを有する。そして、センサ回路11は、局部発振器1と、インパルス生成部2と、検波部3と、接近物体変化抽出部7と、接近物体有無判定部8とを有する。
【0031】
局部発信器1は、インパルスレーダの基準クロックを生成する。インパルス生成部2は、局部発振器1で生成された基準クロックから所定の矩形波(複数の基準クロックパルスを連続させ、矩形波に相当する所定期間だけ継続する高周波パルス)を成形し、送信アンテナ32に入力する。これにより、送信アンテナ32が矩形波に相当する所定期間オンオフされ、送信波が放射される。
【0032】
放射された送信波は検出対象である人の手等により反射され、反射波として受信アンテナ33から受信される。検波部3は、受信アンテナ33から受信される受信信号とインパルス生成部2からの高周波パルスとに基づき、反射波信号を検出する。例えば、本出願人が特願2003−009656において提案した錠管理装置の実施例では、この検波部3は、送信クロックと受信クロックとのビート生成回路およびサンプルホールド回路により実現されている。
【0033】
この反射波信号では、検出対象である人の手の動作により、局部発振器1あるいはインパルス生成部2の信号に対する位相が変動する。その結果、この反射波信号は、人の手の動作に伴い変動したものとなる。また、この反射波信号の振幅は、検出対象である人の手等の誘電率に応じた値となる。また、インパルス式センサ10の周囲に高周波発生体が存在した場合には、図3に示したように高周波の妨害波に重畳して反射波信号が検出されることになる。
【0034】
接近物体変化抽出部7は、反射波信号と高周波の妨害波が重畳した信号から反射波信号部分を抽出する。接近物体有無判定部8は、接近物体変化抽出部7が抽出した信号成分が所定の基準を満たした場合に、人の手などの検出対象が検出されたと判定する。
【実施例1】
【0035】
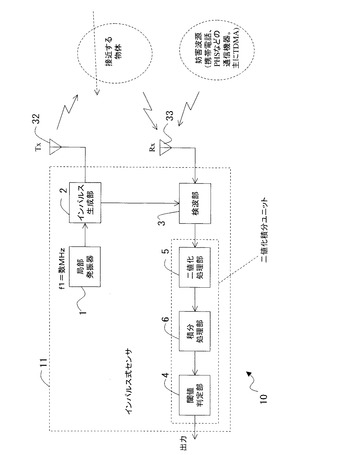
以下、図5および図6の図面を参照して、本発明の実施例1を説明する。図5は、本実施例に係る二値化積分ユニットを搭載したインパルス式センサ10の構成図であり、図6は、本インパルス式センサ10の検出信号を二値化積分ユニットで処理する処理例である。
【0036】
図5に示すように、このインパルス式センサ10は、センサ回路11と、送信アンテナ32と、受信アンテナ33とを有する。そして、センサ回路11は、局部発振器1と、インパルス生成部2と、検波部3と、二値化処理部5と、積分処理部6と、閾値判定部4とを有する。このうち、送信アンテナ32、受信アンテナ33、局部発振器1、インパルス生成部2、および検波部3については、図4の場合と同様の構成であるので、その説明を省略する。図5に示すように、本実施例では、接近物体変化抽出部7および接近物体有無判定部8に相当する構成要素として、二値化処理部5、積分処理部6、および閾値判定部4が設けられている。
【0037】
二値化処理部5には、検波部3の出力(以下、検波信号という)が入力される。二値化処理部5は、コンパレータを有しており、検波信号が所定値以上か否か(所定値を超えたか否か)で高電位または低電位に二値化する。二値化により、矩形形状の信号が生成される。
【0038】
積分処理部6は、いわゆるアナログ積分回路であり、二値化処理部5から入力される信号(以下、二値信号という)を積分する。この二値化処理部5および積分処理部6を二値化積分ユニットと呼ぶ。二値信号は矩形波形を複数組み合わせた形状であり、積分後の信号は、ランプ波形(いわゆるのこぎり波)となる。
【0039】
ランプ波形の傾きは、積分処理部6の積分回路の時定数にしたがう所定値となる。したがって、二値信号の矩形波形の幅が広い(矩形幅に相当する時間が長い)場合には、ランプ波形の変化量(出力値の変化量)が大きくなる。すなわち、のこぎり波の山の高さが高く(谷の深さが深く)なる。
【0040】
一方、二値信号の矩形波形の幅が狭い(矩形幅に相当する時間が短い)場合には、ランプ波形の変化量(出力値の変化量)が小さくなる。すなわち、のこぎり波の山の高さが低く(谷の深さが浅く)なる。
【0041】
閾値判定部4は、例えば、コンパレータを含み、検波部3の出力が所定値以上か否か(所定値を超えたか否か)に応じて、高電位(HI)または低電位(LO)の信号を出力する。
【0042】
したがって、積分処理部6の出力(以下、積分信号という)を入力される閾値判定部4では、矩形波形の幅が十分広い二値信号については、その二値信号積分後の積分信号値が所定の閾値を超えることになる。一方、矩形波形の幅が十分狭い二値信号については、その二値信号積分後の積分信号値が所定の閾値を超えることはない。
【0043】
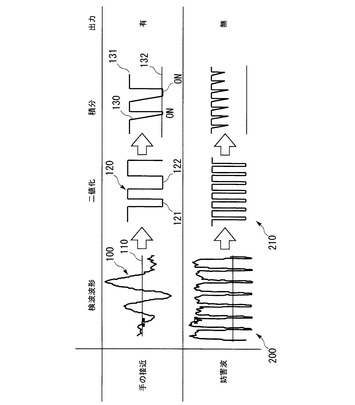
図6に、インパルス式センサ10(検波部3)の検出信号を二値化積分ユニットで処理する処理例を示す。図6において、上段は、手を接近させた場合の信号波形を示している。手が接近した場合、検波部3からは、ピークに対する半値幅が30ms〜40ms程度の山および谷からなる振動波形100が出力される。
【0044】
この振動波形100を所定のスライスレベル110で二値化することで、矩形信号120が生成される。そして、矩形信号120を積分することで、ランプ波形130が生成される。このランプ波形は、矩形信号の矩形が継続する区間(例えば、区間121、122の間)継続して所定の傾きで変化する。その結果、ランプ波形は、例えば、初期値131から開始し、閾値132に達する。閾値132に到達した後のオンの区間(図6でONの文字にて表示した区間)は、矩形信号120の幅、したがって、検出信号の波形の幅(例えば、半値幅)に依存する。
【0045】
一方、図6の下段に妨害波200に対する処理を示す。携帯電話による妨害波200について検波信号は、6.6ms程度の幅の波形となり、PHSによる妨害波200について検波信号は、625μs程度の幅の波形となる。
【0046】
この波形を二値化すると、手を接近させた場合の検出信号と比較して幅の狭い矩形信号210が生成される。したがって、この矩形信号210を手の接近の場合と同様の時定数を有する積分回路で積分しても、矩形信号210の矩形幅が狭いため、積分信号値出力が閾値に到達する前に、矩形の区間が終了する。その結果、閾値判定部4がONになることはない。
【0047】
すなわち、二値化積分ユニットを含むインパルス式センサ10は、妨害波の電力の大小によらず、時間幅により信号を弁別し、安定した妨害波除去機能を発揮する。特に、インパルス式センサの検出信号帯域(例えば、基本波の周期が30ms〜40ms)に近接した帯域のノイズであっても、積分処理部6の時定数と閾値判定部4の閾値との組み合わせにより、確実に弁別できる。
【0048】
<変形例>
上記実施の形態では、二値化処理部5をコンパレータで、また、積分処理部6をアナログ積分回路で構成した。しかし、本発明の実施は、このような構成には限定されない。例えば、二値化処理部5および積分処理部6をデジタルデータに対する信号処理、例えば、DSP(Digital Signal Processor)に搭載した信号処理プログラムで実現してもよい。
【0049】
上記実施の形態では、インパルス式レーダによる対象物検出処理に二値化積分を適用する例を示した。しかし、本発明の実施は、このような構成には限定されない。例えば、光を放射し、その反射波を受信するセンサにおいて本発明を実施してもよい。
【実施例2】
【0050】
図7から図9の図面を参照して本発明の実施例2を説明する。実施例1では、二値化処理部5、積分処理部6、および閾値判定部4により、インパルス式センサ10の検出信号の帯域に近接した帯域のノイズが検出信号に重畳した場合でも、検出信号を弁別するセンサ回路11の構成とその処理例を示した。本実施例では、二値化処理部5、積分処理部6、および閾値判定部4に代えて、波形形状を解析することにより反射波信号より高域の高周波ノイズの重畳した信号から反射波信号を抽出する例を示す。本実施例の他の構成および作用は実施例1の場合と同様である。そこで、同一の構成要素については同一の符号を付してその説明を省略する。
【0051】
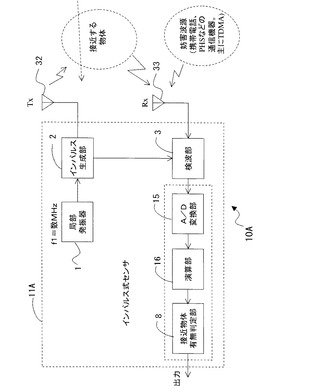
図7は、本実施例に係るインパルス式センサ10Aの構成図である。インパルス式センサ10Aは、センサ回路11Aに、検波部3の検出信号を受けるA/D変換部15、A/D変換部15によってデジタルデータに変換された検出信号を処理する演算部16、および演算部16の出力信号に基づき接近物体の有無を判定する接近物体有無判定部8を有する点で、実施例1の場合と相違する。
【0052】
A/D変換部15は、検波部3の検出した検波信号をデジタルデータに変換する。演算部16は、CPU(Central Processing Unit)、DSP(Digital Signal Processor)等により実現され、デジタルデータに変換された検波信号に対して信号処理を実行する。例えば、演算部16は、図3に示した(B−4)(C−5)のような波形から包絡線信号を抽出する。
【0053】
接近物体判定部8は、演算部16での信号処理の結果から接近物体の有無を判定する。例えば、接近物体判定部8は、演算部16が抽出した包絡線信号が所定の基準を満たすか否かを判定することにより、接近物体の有無を検知する。なお、図7では、演算部16と接近物体有無判定部8とを異なる機能ブロックで示しているが、演算部16と接近物体有無判定部8とが単一のCPU上で実行される信号処理プログラムであってもよい。また、これらが単一のDSP上で実行される信号処理プログラムであってもよい。また、演算部16と接近物体有無判定部8とを加減算回路、乗算回路、論理演算回路等のハードウェアで実現してもよい。
【0054】
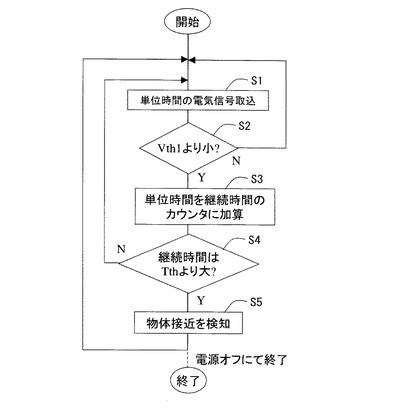
図8に、接近物体有無判定部8で実行される処理のフローチャートを示す。この処理では、A/D変換部15から演算部16に、刻々とデジタルデータに変換された検出信号(電気信号)が入力されている。演算部16は、デジタルデータに変換された検出信号の波形を整形し、接近物体有無判定部8に引き渡す。例えば、演算部16は、デジタルデータに変換された検出信号から包絡線信号を抽出する。包絡線の抽出手順については、広く知られているのでその説明を省略する。
【0055】
接近物体有無判定部8は、順次各時刻の検出信号(単位時間区間の包絡線に相当する電気信号)を取り込む(S1)。次に、接近物体有無判定部8は、その検出信号が所定の閾値Vth1より小さいか否かを判定する(S2)。その検出信号が所定の閾値Vth1より小さくない場合、接近物体有無判定部8は、制御をS1に戻し、次の検出信号を処理する。
【0056】
一方、S2の判定で、その検出信号が所定の閾値Vth1より小さい場合、接近物体有無判定部8は、その電気信号の単位時間を加算して継続時間を算出する(S3)。この継続時間は、検出信号が、継続して閾値Vth1を下回った時間である。そして、演算部8は、その継続時間が所定の閾値Tthより大きいか否かを判定する(S4)。
【0057】
継続時間が所定の閾値Tthより大きくない場合、接近物体有無判定部8は、制御をS1に戻し、次の検出信号を処理する。一方、継続時間が所定の閾値Tthより大きい場合、接近物体有無判定部8は、物体の接近を検知する(S5)。以上の処理は、電源のオフにより終了する。
【0058】
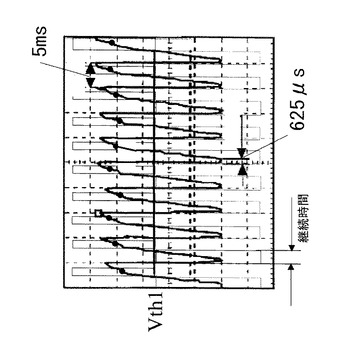
図9に、Vth1と継続時間の関係を示す。図9は、図3に示した(B−4)(C−5)の波形を拡大した図である。ここで、閾値Vth1は、検出信号の値(例えば、電圧値)に対する基準値である。また、継続時間は、検出信号がこの閾値Vth1を継続して下回る時間である。例えば、人の手が接近したときの波形では、継続時間は、30〜40ms程度となる。一方、携帯電話あるいはPHSに対しては、搬送波を除去したスロットの切替に伴う振動成分の周期、すなわち、概ねスロットの時間幅程度の時間となる。
【0059】
以上述べたように、本実施例のインパルス式センサ10Aによれば、A/D変換部15、演算部16および接近物体有無判定部8の処理により、検波部3の検出信号の包絡線が、所定の閾値Vth1を所定時間Tthより長く下回ったか否かにより、接近物体の有無を判定する。したがって、図3の(B−4)(C−5)に示したような高周波のノイズ上側の包絡線として接近物体の反射波信号が検出された場合も、正確に接近物体の有無を検知できる。
【実施例3】
【0060】
図10から図13の図面を参照して本発明の実施例3を説明する。実施例3では、インパルス式センサ10の各種設備への適用例を示す。
【0061】
図10は、インパルス式センサ10のアンテナ送信32、受信アンテナ33を押しボタンスイッチ40の突起内に収容した例を示す。この場合、インパルス式センサ10のセンサ回路11は、突起内に格納してもよいし、他の位置、例えば、不図示の制御基板上に設けてもよい。
【0062】
このような押しボタンスイッチ40に、インパルス式センサ10(少なくとも、送信アンテナ32および受信アンテナ33)を格納することにより、押しボタンを操作しようとする人の手の接近を検知できる。このような押しボタンは、様々な設備、例えば、建物の出入り口の開閉操作手段、車両の乗降口の開閉操作手段、船舶の乗降口の開閉操作手段、旅客運搬手段の乗降口の開閉操作手段、輸送手段の出入り口の開閉操作手段、または、所定の操作対象物を操作する操作手段として使用される。したがって、押しボタンスイッチ40に、インパルス式センサ10(少なくとも、送信アンテナ32および受信アンテナ33)を格納することにより、例えば、これらの機械または設備の操作のために接近する人体の一部を検知できる。
【0063】
図11は、インパルス式センサ10の送信アンテナ32、受信アンテナ33をドアハンドル41内に収容した例を示す。この場合、インパルス式センサ10のセンサ回路11は、ドアハンドル41内に格納してもよいし、他の位置、例えば、不図示の制御基板上に設けてもよい。また、ドアハンドル41の形状は、図11のようなハンドル状(棒状)に限定されず、レバー状、ノブ状、バー状、フラップ状等、様々な形状のものに適用できる。
【0064】
図11に示すように、ドアハンドル41の内部にインパルス式センサ10(少なくとも送信アンテナ32、受信アンテナ33)を設けることにより、ドアハンドル41に四方、八方から接近する人体の一部の動きを検知できる。
【0065】
図12は、インパルス式センサ10の送信アンテナ32、受信アンテナ33をドアハンドル41が設置されたドアの内部(ドアハンドル41の背面のドア内)に収容した例を示す。図11に示すドアの内部のように、人が操作する操作部であるドアハンドルが設置されている壁部内にインパルス式センサ10(または、は、少なくとも送信アンテナ32、受信アンテナ33)を組み込むことで、壁部の正面から接近する人体の一部を検知できる。この場合も、ドアハンドル41の形状は、図12のようなハンドル状(棒状)に限定されず、レバー状、ノブ状、バー状、フラップ状等、様々な形状のものに適用できる。
【0066】
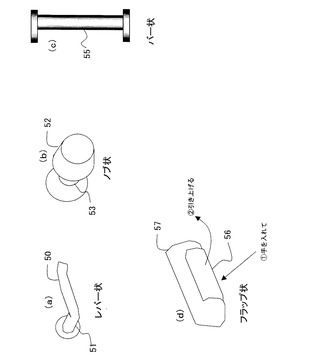
図13に、インパルス式センサ10(または、少なくとも送信アンテナ32、受信アンテナ33)を適用する操作部の例として、ドアハンドルの例を列挙する。ドアハンドルとしては、図13に示すような、レバー状、ノブ状、バー状、フラップ状のいずれについても、インパルス式センサ10(または、は、少なくとも送信アンテナ32、受信アンテナ33)を組み込み可能である。
【0067】
インパルス式センサ10は、これらのドアバンドルを操作する場合に、人の手が確実に接近する位置に設ければよい。例えば、レバー状ノブハンドルのレバー50内、レバー50を支持する回転軸51の内部である。また、ノブ52の内部、ノブ52を支持する回転軸53の内部である。
【0068】
バー状のドアハンドルの場合は、バー55の内部が好ましい。フラップ状のドアハンドルの場合は、フラップ56の裏側、フラップ56を支持する箱部57の内部等である。
【0069】
また、すでに述べたように、これらのドアハンドルが設定されるドアの内部にインパルス式センサ10を設けてもよい。
【0070】
<変形例>
上記実施の形態では、主として人体の一部、例えば、人の手等が接近する場合の検出処理を示した。しかし、本発明の実施において、検出対象は、人に限定されるものではない。予め、その検出対象の誘電率が分かっている場合には、その誘電率に基づいて反射波のゲイン調整をすればよい。したがって、本発明は、人以外の動物、機械等、様々な対象の検出処理にも適用できる。
【技術分野】
【0001】
本発明は、車両、建物等への対象物の接近を検出する際の信号処理技術に関する。
【背景技術】
【0002】
近年、車両、建物等への対象物の接近を検知するセンサが注目されている。このようなセンサは、例えば、電磁波、あるいは、光の放射とその反射波の受信とにより、対象物としての人、または人体の一部(例えば、手)等の接近を検知する。このようなセンサの1つとしては、断続的な電磁波の放射により対象物を検知するインパルス式センサが知られている。
【0003】
このようなセンサにおいて、電磁波、あるいは、光等の信号を受信して処理する場合、信号成分とノイズ成分の識別が必要となる場合が多い。ノイズを信号として処理してしまうと、上記センサ等が過敏に動作し、本来存在しない対象物を存在すると誤検出するからである。
【0004】
従来から、信号成分とノイズ成分との周波数帯域の相違を利用して、様々なノイズ除去技術が提案されてきた。例えば、アナログのローパスフィルタ、ハイパスフィルタ、バンドパスフィルタ等により、信号成分とノイズ成分を分離していた。また、デジタル信号に対しては、平均値化処理により高周波ノイズを除去するものもあった。しかし、単純なアナログのフィルタ、あるいは、デジタルデータに対する平均値化処理では、完全にノイズを除去できない場合があった。すなわち、信号成分の周波数帯域とノイズの周波数帯域とが十分に分離されている場合には、単純なフィルタによっても信号とノイズを弁別可能である。しかし、信号成分の周波数帯域とノイズの周波数帯域とが近接するような場合には、その弁別が困難となる。
【0005】
図1に、人の手の接近を検知するインパルス式センサが組み込まれたドアとセンサの検出信号例を示す。図1において、(A−1)は、このドアに人の手が接近した状態を示す。ここでは、インパルス式センサがドアの取っ手付近に組み込まれていると想定する。また、(A−2)は、(A−1)のようにこのドアに人の手が接近した場合におけるインパルス式センサの出力を示す。(A−2)に示すように、このドアに人の手が接近すると、30〜40ms程度の半値幅の山および谷からなる振動波形100が検出される。なお、振動波形100の前後の波形101および102は、各々インパルス式センサで受信される雑音である。
【0006】
図1において、(B−1)は、このドアにTDMA(Time Division Multiple Access)方式の携帯電話を接近させた状態を示す。また、(B−2)は、(B−1)のようにこのドアに携帯電話が接近した場合におけるインパルス式センサの出力を示す。典型的には、携帯電話は、1スロット6.6ms(20ms周期のフレームで1フレーム3スロット構成の場合)である。したがって、(B−2)に示すように、このような携帯電話により、幅が6.6ms程度の山または谷を有する振動波形が検出される。
【0007】
ここで、実際の携帯電話では、上記タイムスロットの間に800Mzあるいは、1.5GHz等の高周波帯域の搬送波により携帯電話と基地局との通信がなされる。そのため、そのような高周波も、受信アンテナ33から受信され、妨害波となる。しかし、そのような高周波は、人の手の接近を検出するインパルス式センサの検出信号帯域(基本波周期30〜40ms程度)と比較して十分に高周波数帯域にあり、従来のローパスフィルタ等により簡単に除去できる。そこで、図1においては、そのような高周波帯域の搬送波は省略されている(以下、(C−2)等も同様である)。
【0008】
一方、(C−2)は、携帯電話に代えてPHS(Personal Handyphone System)をこのドアに接近させた場合におけるインパルス式センサの出力を示す。また、(C−3)は、(C−2)の波形の時間軸を拡大した図である。PHSは、典型的には、1スロット625μs(5ms周期のフレームで1フレーム8スロット構成の場合)である。したがって、(C−3)に示すように、このようなPHSにより、波形の幅が625μs程度の山または谷を有する振動波形がインパルス式センサで検出される。このように、携帯電話、あるいは、PHS等の通信機器は、インパルス式センサに対して妨害波の発信源となる。
【0009】
従来、バンドパスフィルタ等により、インパルス式センサの検出信号から妨害波を除去することが一般的であった。しかし、そのようなフィルタは、妨害波の電力が小さい場合には効果を発揮しても、電力が大きい妨害波を完全には除去できない場合があった。特に、TDMA方式による携帯電話の場合、高周波数帯域の搬送波と比較してセンサ検出信号の帯域に近い低域側に、タイムスロットの切り替えに伴う振動成分が含まれる。このような振動成分は、インパルス式センサの検出信号との弁別が困難であった。
【0010】
図2に、従来のバンドパスフィルタを含むインパルス式センサでの検出信号の処理結果例を示す。図2の上段は、電力の小さい妨害波が入力されたバンドパスフィルタの処理を示す。妨害波の電力が小さい場合には、バンドパスフィルタにより、妨害波が除去され、バンドパスフィルタ後の信号が閾値に達することはない。したがって、インパルス式センサの過作動(対象物が存在しないのに存在すると認識するような動作)を防止できる。
【0011】
図2の下段は、電力の大きい妨害波が入力されたバンドパスフィルタの処理を示す。妨害波の電力が大きい場合には、バンドパスフィルタにより、妨害波が完全には除去されない。その結果、バンドパスフィルタ後の信号が閾値に達する場合がある。この場合、インパルス式センサの過作動を防止できず、人が存在しないのに存在すると判定しまうことになる。以上のように、バンドパスフィルタを使用する場合には、インパルス式センサの検出信号帯域に近い帯域の妨害波によるインパルス式センサの過作動を完全には防止できない。
【0012】
このような問題に対する対策として、信号処理の対象となる装置に特有のノイズ除去方法が提案されてきた。例えば、通信機器向けのノイズブランカ回路において、妨害波が入力されたとき、受信部の出力を止め、妨害波による悪影響を抑制する技術が提案されている(特許文献1参照)。
【0013】
しかし、従来の技術においては、以下のような問題があった。
(1)上記ノイズブランカ回路をセンサ回路に適用した場合には、ノイズブランカ動作の間、センサの検知動作が停止することになる。すなわち、検知したい事象以外の事象に対してセンサが反応する過動作を抑制できる反面、検知すべき事象を検知しない不動作が発生する。
(2)回路構成が複雑である。したがって、小型化、低電力化が困難であり、利用用途が限定される。
【特許文献1】実開平6−52237号公報
【発明の開示】
【発明が解決しようとする課題】
【0014】
そこで、本発明では、検出対象の接近を検知するセンサの信号特性に着目し、上記従来技術の問題を解決する信号処理技術を提案する。すなわち、本発明の目的は、電磁波、あるいは、光の放射とその反射波の受信により検出対象の接近を検知するセンサにおいて、センサの検出信号に近接した帯域のノイズであっても簡易確実に除去できる技術を提供することにある。
【課題を解決するための手段】
【0015】
本発明は、検出対象の接近に伴い変動する電気信号を生成するセンサに接続され、上記電気信号を処理する処理装置であり、前記検出対象の接近に伴い変動する電気信号と前記電気信号よりも周波数の高い高周波信号とが重畳した信号から前記電気信号を抽出する手段と、前記電気信号の波形から前記検出対象の接近を判定する手段とを備えるものである。
【0016】
この処理装置は、前記検出対象の接近に伴い変動する電気信号と前記電気信号よりも周波数の高い高周波信号とが重畳した信号から前記電気信号を抽出し、前記電気信号の波形から前記検出対象の接近を判定するので、前記高周波信号の影響を除去して検出対象の接近を判定できる。
【0017】
また、本発明は、検出対象の接近に伴い変動する電気信号を生成するセンサと、前記検出対象の接近に伴い変動する電気信号と前記電気信号よりも周波数の高い高周波信号とが重畳した信号から前記電気信号を抽出する手段と、前記電気信号の波形から前記検出対象の接近を判定する手段とを備える対象物検出装置であってもよい。
【0018】
好ましくは、上記センサは、所定の時間間隔でインパルス信号を生成する生成部と、上記インパルス信号を放射する放射部と、上記放射されたインパルス信号が検出対象により反射された反射信号を受信する受信部と、上記インパルス信号と上記反射信号とにより変動する電気信号を生成する検波部とを有するものでもよい。
【0019】
好ましくは、上記放射部は、電磁波または光によりインパルス信号を放射し、上記受信部は、電磁波または光の反射信号を受信するものでもよい。
【0020】
前記センサは、建物の出入り口の開閉操作手段、車両の乗降口の開閉操作手段、船舶の乗降口の開閉操作手段、旅客運搬手段の乗降口の開閉操作手段、輸送手段の出入り口の開閉操作手段、または、所定の操作対象物を操作する操作手段の内部に埋め込まれている構成としてもよい。また、前記センサは、建物の出入り口の開閉機能を提供する操作手段が設置される出入り口開閉部外壁内、車両の乗降口の開閉操作手段が設置される乗降口開閉部外壁内、船舶の乗降口の開閉操作手段が設置される乗降口開閉部外壁内、旅客運搬手段の乗降口の開閉機能を提供する操作手段が設置される乗降口開閉部外壁内、輸送手段の出入り口の開閉機能を提供する操作手段が設置される出入り口開閉部外壁内、または、所定の操作対象物を操作する機能を提供する操作手段が設置される筐体内に設けられている構成としてもよい。
【0021】
センサが、これらの開閉操作手段等、これらの開閉操作手段が設置される外壁内、または筐体等に設置されることで、これらの開閉操作手段を操作しようとする検出対象の接近を確実に検知できる。
【発明の効果】
【0022】
本発明によれば、電磁波、あるいは、光の放射とその反射波の受信により検出対象の接近を検知するセンサにおいて、センサの検出信号帯域に近接する帯域のノイズを簡易確実に除去することができる。
【図面の簡単な説明】
【0023】
【図1】インパルス式センサが組み込まれたドアとセンサの検出信号を示す図
【図2】従来のバンドパスフィルタの処理結果の例を示す図
【図3】本発明の一実施形態の原理を示す図
【図4】インパルス式センサの原理的構成図
【図5】実施例1に係るインパルス式センサの構成図
【図6】インパルス式センサの検出信号を二値化積分ユニットで処理する処理例
【図7】実施例2に係るインパルス式センサの構成図
【図8】実施例2に係る接近物体有無判定部で実行される処理のフローチャート
【図9】Vth1と継続時間の関係を示す図
【図10】インパルス式センサを押しボタンスイッチの突起内に収容した例を示す図
【図11】インパルス式センサをドアハンドル内に収容した例を示す図
【図12】インパルス式センサをドアハンドル背面のドア内に収容した例を示す図
【図13】インパルス式センサを適用するドアハンドルの例
【符号の説明】
【0024】
10 インパルス式センサ
11 センサ回路
1 局部発振器
2 インパルス生成部
3 検波部
4 閾値判定部
5 二値化処理部
6 積分処理部
32 送信アンテナ
33 受信アンテナ
【発明を実施するための最良の形態】
【0025】
以下、図面を参照して本発明を実施するための最良の形態について説明する。以下に示す実施の形態の構成は例示であり、本発明は実施の形態の構成に限定されない。
【0026】
図3は、本実施形態の原理を示す図であり、図4は、本実施形態に係るインパルス式センサ10の原理的構成図である。図3において、(A−1)および(A−2)は、図1に示したものと同様であり、インパルス式センサが組み込まれたドアとセンサの検出信号例である。
【0027】
このようなインパルス式センサにTDMA方式の携帯電話、PHSが接近した場合、(A−2)の手の接近よる検出信号に重畳して、すでに述べたようなタイムスロットの切替に伴う振動成分がノイズとなって検出される。
【0028】
(B−4)では、円100付近に高周波のノイズ(約6.6msを1スロットする20msの周期)に重畳した手の接近による検出信号(数十ms程度の周期)が示されている。また、(C−5)では、円101付近に高周波のノイズ(約625μsを1スロットとする5msの周期)に重畳した手の接近による検出信号が示されている。このように、インパルス式センサの周囲に携帯電話、PHS等の高周波の発生体が存在した場合、インパルス式センサが手の接近を検出したときは、手の接近による比較的低周波の検出信号が高周波のノイズ上側(ないし下側)の包絡線の変化として現れることになる。
【0029】
したがって、このような高周波のノイズが存在する環境であっても、手の接近に伴う低周波の検出信号を分離し抽出できれば、インパルス式センサで手の接近を正確に検知できる。
【0030】
図4に示すように、このインパルス式センサ10は、センサ回路11と、送信アンテナ32と、受信アンテナ33とを有する。そして、センサ回路11は、局部発振器1と、インパルス生成部2と、検波部3と、接近物体変化抽出部7と、接近物体有無判定部8とを有する。
【0031】
局部発信器1は、インパルスレーダの基準クロックを生成する。インパルス生成部2は、局部発振器1で生成された基準クロックから所定の矩形波(複数の基準クロックパルスを連続させ、矩形波に相当する所定期間だけ継続する高周波パルス)を成形し、送信アンテナ32に入力する。これにより、送信アンテナ32が矩形波に相当する所定期間オンオフされ、送信波が放射される。
【0032】
放射された送信波は検出対象である人の手等により反射され、反射波として受信アンテナ33から受信される。検波部3は、受信アンテナ33から受信される受信信号とインパルス生成部2からの高周波パルスとに基づき、反射波信号を検出する。例えば、本出願人が特願2003−009656において提案した錠管理装置の実施例では、この検波部3は、送信クロックと受信クロックとのビート生成回路およびサンプルホールド回路により実現されている。
【0033】
この反射波信号では、検出対象である人の手の動作により、局部発振器1あるいはインパルス生成部2の信号に対する位相が変動する。その結果、この反射波信号は、人の手の動作に伴い変動したものとなる。また、この反射波信号の振幅は、検出対象である人の手等の誘電率に応じた値となる。また、インパルス式センサ10の周囲に高周波発生体が存在した場合には、図3に示したように高周波の妨害波に重畳して反射波信号が検出されることになる。
【0034】
接近物体変化抽出部7は、反射波信号と高周波の妨害波が重畳した信号から反射波信号部分を抽出する。接近物体有無判定部8は、接近物体変化抽出部7が抽出した信号成分が所定の基準を満たした場合に、人の手などの検出対象が検出されたと判定する。
【実施例1】
【0035】
以下、図5および図6の図面を参照して、本発明の実施例1を説明する。図5は、本実施例に係る二値化積分ユニットを搭載したインパルス式センサ10の構成図であり、図6は、本インパルス式センサ10の検出信号を二値化積分ユニットで処理する処理例である。
【0036】
図5に示すように、このインパルス式センサ10は、センサ回路11と、送信アンテナ32と、受信アンテナ33とを有する。そして、センサ回路11は、局部発振器1と、インパルス生成部2と、検波部3と、二値化処理部5と、積分処理部6と、閾値判定部4とを有する。このうち、送信アンテナ32、受信アンテナ33、局部発振器1、インパルス生成部2、および検波部3については、図4の場合と同様の構成であるので、その説明を省略する。図5に示すように、本実施例では、接近物体変化抽出部7および接近物体有無判定部8に相当する構成要素として、二値化処理部5、積分処理部6、および閾値判定部4が設けられている。
【0037】
二値化処理部5には、検波部3の出力(以下、検波信号という)が入力される。二値化処理部5は、コンパレータを有しており、検波信号が所定値以上か否か(所定値を超えたか否か)で高電位または低電位に二値化する。二値化により、矩形形状の信号が生成される。
【0038】
積分処理部6は、いわゆるアナログ積分回路であり、二値化処理部5から入力される信号(以下、二値信号という)を積分する。この二値化処理部5および積分処理部6を二値化積分ユニットと呼ぶ。二値信号は矩形波形を複数組み合わせた形状であり、積分後の信号は、ランプ波形(いわゆるのこぎり波)となる。
【0039】
ランプ波形の傾きは、積分処理部6の積分回路の時定数にしたがう所定値となる。したがって、二値信号の矩形波形の幅が広い(矩形幅に相当する時間が長い)場合には、ランプ波形の変化量(出力値の変化量)が大きくなる。すなわち、のこぎり波の山の高さが高く(谷の深さが深く)なる。
【0040】
一方、二値信号の矩形波形の幅が狭い(矩形幅に相当する時間が短い)場合には、ランプ波形の変化量(出力値の変化量)が小さくなる。すなわち、のこぎり波の山の高さが低く(谷の深さが浅く)なる。
【0041】
閾値判定部4は、例えば、コンパレータを含み、検波部3の出力が所定値以上か否か(所定値を超えたか否か)に応じて、高電位(HI)または低電位(LO)の信号を出力する。
【0042】
したがって、積分処理部6の出力(以下、積分信号という)を入力される閾値判定部4では、矩形波形の幅が十分広い二値信号については、その二値信号積分後の積分信号値が所定の閾値を超えることになる。一方、矩形波形の幅が十分狭い二値信号については、その二値信号積分後の積分信号値が所定の閾値を超えることはない。
【0043】
図6に、インパルス式センサ10(検波部3)の検出信号を二値化積分ユニットで処理する処理例を示す。図6において、上段は、手を接近させた場合の信号波形を示している。手が接近した場合、検波部3からは、ピークに対する半値幅が30ms〜40ms程度の山および谷からなる振動波形100が出力される。
【0044】
この振動波形100を所定のスライスレベル110で二値化することで、矩形信号120が生成される。そして、矩形信号120を積分することで、ランプ波形130が生成される。このランプ波形は、矩形信号の矩形が継続する区間(例えば、区間121、122の間)継続して所定の傾きで変化する。その結果、ランプ波形は、例えば、初期値131から開始し、閾値132に達する。閾値132に到達した後のオンの区間(図6でONの文字にて表示した区間)は、矩形信号120の幅、したがって、検出信号の波形の幅(例えば、半値幅)に依存する。
【0045】
一方、図6の下段に妨害波200に対する処理を示す。携帯電話による妨害波200について検波信号は、6.6ms程度の幅の波形となり、PHSによる妨害波200について検波信号は、625μs程度の幅の波形となる。
【0046】
この波形を二値化すると、手を接近させた場合の検出信号と比較して幅の狭い矩形信号210が生成される。したがって、この矩形信号210を手の接近の場合と同様の時定数を有する積分回路で積分しても、矩形信号210の矩形幅が狭いため、積分信号値出力が閾値に到達する前に、矩形の区間が終了する。その結果、閾値判定部4がONになることはない。
【0047】
すなわち、二値化積分ユニットを含むインパルス式センサ10は、妨害波の電力の大小によらず、時間幅により信号を弁別し、安定した妨害波除去機能を発揮する。特に、インパルス式センサの検出信号帯域(例えば、基本波の周期が30ms〜40ms)に近接した帯域のノイズであっても、積分処理部6の時定数と閾値判定部4の閾値との組み合わせにより、確実に弁別できる。
【0048】
<変形例>
上記実施の形態では、二値化処理部5をコンパレータで、また、積分処理部6をアナログ積分回路で構成した。しかし、本発明の実施は、このような構成には限定されない。例えば、二値化処理部5および積分処理部6をデジタルデータに対する信号処理、例えば、DSP(Digital Signal Processor)に搭載した信号処理プログラムで実現してもよい。
【0049】
上記実施の形態では、インパルス式レーダによる対象物検出処理に二値化積分を適用する例を示した。しかし、本発明の実施は、このような構成には限定されない。例えば、光を放射し、その反射波を受信するセンサにおいて本発明を実施してもよい。
【実施例2】
【0050】
図7から図9の図面を参照して本発明の実施例2を説明する。実施例1では、二値化処理部5、積分処理部6、および閾値判定部4により、インパルス式センサ10の検出信号の帯域に近接した帯域のノイズが検出信号に重畳した場合でも、検出信号を弁別するセンサ回路11の構成とその処理例を示した。本実施例では、二値化処理部5、積分処理部6、および閾値判定部4に代えて、波形形状を解析することにより反射波信号より高域の高周波ノイズの重畳した信号から反射波信号を抽出する例を示す。本実施例の他の構成および作用は実施例1の場合と同様である。そこで、同一の構成要素については同一の符号を付してその説明を省略する。
【0051】
図7は、本実施例に係るインパルス式センサ10Aの構成図である。インパルス式センサ10Aは、センサ回路11Aに、検波部3の検出信号を受けるA/D変換部15、A/D変換部15によってデジタルデータに変換された検出信号を処理する演算部16、および演算部16の出力信号に基づき接近物体の有無を判定する接近物体有無判定部8を有する点で、実施例1の場合と相違する。
【0052】
A/D変換部15は、検波部3の検出した検波信号をデジタルデータに変換する。演算部16は、CPU(Central Processing Unit)、DSP(Digital Signal Processor)等により実現され、デジタルデータに変換された検波信号に対して信号処理を実行する。例えば、演算部16は、図3に示した(B−4)(C−5)のような波形から包絡線信号を抽出する。
【0053】
接近物体判定部8は、演算部16での信号処理の結果から接近物体の有無を判定する。例えば、接近物体判定部8は、演算部16が抽出した包絡線信号が所定の基準を満たすか否かを判定することにより、接近物体の有無を検知する。なお、図7では、演算部16と接近物体有無判定部8とを異なる機能ブロックで示しているが、演算部16と接近物体有無判定部8とが単一のCPU上で実行される信号処理プログラムであってもよい。また、これらが単一のDSP上で実行される信号処理プログラムであってもよい。また、演算部16と接近物体有無判定部8とを加減算回路、乗算回路、論理演算回路等のハードウェアで実現してもよい。
【0054】
図8に、接近物体有無判定部8で実行される処理のフローチャートを示す。この処理では、A/D変換部15から演算部16に、刻々とデジタルデータに変換された検出信号(電気信号)が入力されている。演算部16は、デジタルデータに変換された検出信号の波形を整形し、接近物体有無判定部8に引き渡す。例えば、演算部16は、デジタルデータに変換された検出信号から包絡線信号を抽出する。包絡線の抽出手順については、広く知られているのでその説明を省略する。
【0055】
接近物体有無判定部8は、順次各時刻の検出信号(単位時間区間の包絡線に相当する電気信号)を取り込む(S1)。次に、接近物体有無判定部8は、その検出信号が所定の閾値Vth1より小さいか否かを判定する(S2)。その検出信号が所定の閾値Vth1より小さくない場合、接近物体有無判定部8は、制御をS1に戻し、次の検出信号を処理する。
【0056】
一方、S2の判定で、その検出信号が所定の閾値Vth1より小さい場合、接近物体有無判定部8は、その電気信号の単位時間を加算して継続時間を算出する(S3)。この継続時間は、検出信号が、継続して閾値Vth1を下回った時間である。そして、演算部8は、その継続時間が所定の閾値Tthより大きいか否かを判定する(S4)。
【0057】
継続時間が所定の閾値Tthより大きくない場合、接近物体有無判定部8は、制御をS1に戻し、次の検出信号を処理する。一方、継続時間が所定の閾値Tthより大きい場合、接近物体有無判定部8は、物体の接近を検知する(S5)。以上の処理は、電源のオフにより終了する。
【0058】
図9に、Vth1と継続時間の関係を示す。図9は、図3に示した(B−4)(C−5)の波形を拡大した図である。ここで、閾値Vth1は、検出信号の値(例えば、電圧値)に対する基準値である。また、継続時間は、検出信号がこの閾値Vth1を継続して下回る時間である。例えば、人の手が接近したときの波形では、継続時間は、30〜40ms程度となる。一方、携帯電話あるいはPHSに対しては、搬送波を除去したスロットの切替に伴う振動成分の周期、すなわち、概ねスロットの時間幅程度の時間となる。
【0059】
以上述べたように、本実施例のインパルス式センサ10Aによれば、A/D変換部15、演算部16および接近物体有無判定部8の処理により、検波部3の検出信号の包絡線が、所定の閾値Vth1を所定時間Tthより長く下回ったか否かにより、接近物体の有無を判定する。したがって、図3の(B−4)(C−5)に示したような高周波のノイズ上側の包絡線として接近物体の反射波信号が検出された場合も、正確に接近物体の有無を検知できる。
【実施例3】
【0060】
図10から図13の図面を参照して本発明の実施例3を説明する。実施例3では、インパルス式センサ10の各種設備への適用例を示す。
【0061】
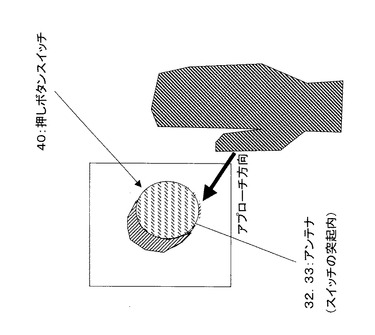
図10は、インパルス式センサ10のアンテナ送信32、受信アンテナ33を押しボタンスイッチ40の突起内に収容した例を示す。この場合、インパルス式センサ10のセンサ回路11は、突起内に格納してもよいし、他の位置、例えば、不図示の制御基板上に設けてもよい。
【0062】
このような押しボタンスイッチ40に、インパルス式センサ10(少なくとも、送信アンテナ32および受信アンテナ33)を格納することにより、押しボタンを操作しようとする人の手の接近を検知できる。このような押しボタンは、様々な設備、例えば、建物の出入り口の開閉操作手段、車両の乗降口の開閉操作手段、船舶の乗降口の開閉操作手段、旅客運搬手段の乗降口の開閉操作手段、輸送手段の出入り口の開閉操作手段、または、所定の操作対象物を操作する操作手段として使用される。したがって、押しボタンスイッチ40に、インパルス式センサ10(少なくとも、送信アンテナ32および受信アンテナ33)を格納することにより、例えば、これらの機械または設備の操作のために接近する人体の一部を検知できる。
【0063】
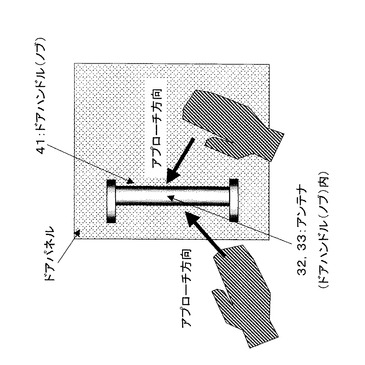
図11は、インパルス式センサ10の送信アンテナ32、受信アンテナ33をドアハンドル41内に収容した例を示す。この場合、インパルス式センサ10のセンサ回路11は、ドアハンドル41内に格納してもよいし、他の位置、例えば、不図示の制御基板上に設けてもよい。また、ドアハンドル41の形状は、図11のようなハンドル状(棒状)に限定されず、レバー状、ノブ状、バー状、フラップ状等、様々な形状のものに適用できる。
【0064】
図11に示すように、ドアハンドル41の内部にインパルス式センサ10(少なくとも送信アンテナ32、受信アンテナ33)を設けることにより、ドアハンドル41に四方、八方から接近する人体の一部の動きを検知できる。
【0065】
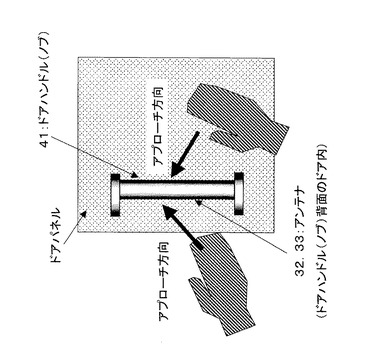
図12は、インパルス式センサ10の送信アンテナ32、受信アンテナ33をドアハンドル41が設置されたドアの内部(ドアハンドル41の背面のドア内)に収容した例を示す。図11に示すドアの内部のように、人が操作する操作部であるドアハンドルが設置されている壁部内にインパルス式センサ10(または、は、少なくとも送信アンテナ32、受信アンテナ33)を組み込むことで、壁部の正面から接近する人体の一部を検知できる。この場合も、ドアハンドル41の形状は、図12のようなハンドル状(棒状)に限定されず、レバー状、ノブ状、バー状、フラップ状等、様々な形状のものに適用できる。
【0066】
図13に、インパルス式センサ10(または、少なくとも送信アンテナ32、受信アンテナ33)を適用する操作部の例として、ドアハンドルの例を列挙する。ドアハンドルとしては、図13に示すような、レバー状、ノブ状、バー状、フラップ状のいずれについても、インパルス式センサ10(または、は、少なくとも送信アンテナ32、受信アンテナ33)を組み込み可能である。
【0067】
インパルス式センサ10は、これらのドアバンドルを操作する場合に、人の手が確実に接近する位置に設ければよい。例えば、レバー状ノブハンドルのレバー50内、レバー50を支持する回転軸51の内部である。また、ノブ52の内部、ノブ52を支持する回転軸53の内部である。
【0068】
バー状のドアハンドルの場合は、バー55の内部が好ましい。フラップ状のドアハンドルの場合は、フラップ56の裏側、フラップ56を支持する箱部57の内部等である。
【0069】
また、すでに述べたように、これらのドアハンドルが設定されるドアの内部にインパルス式センサ10を設けてもよい。
【0070】
<変形例>
上記実施の形態では、主として人体の一部、例えば、人の手等が接近する場合の検出処理を示した。しかし、本発明の実施において、検出対象は、人に限定されるものではない。予め、その検出対象の誘電率が分かっている場合には、その誘電率に基づいて反射波のゲイン調整をすればよい。したがって、本発明は、人以外の動物、機械等、様々な対象の検出処理にも適用できる。
【特許請求の範囲】
【請求項1】
検出対象の接近に伴い変動する電気信号を生成するセンサに接続され、前記電気信号を処理する処理装置であり、
前記検出対象の接近に伴い変動する電気信号と前記電気信号よりも周波数の高い高周波信号とが重畳した信号から前記電気信号を抽出する手段と、
前記電気信号の波形から前記検出対象の接近を判定する手段とを備える処理装置。
【請求項2】
検出対象の接近に伴い変動する電気信号を生成するセンサと、
前記検出対象の接近に伴い変動する電気信号と前記電気信号よりも周波数の高い高周波信号とが重畳した信号から前記電気信号を抽出する手段と、
前記電気信号の波形から前記検出対象の接近を判定する手段とを備える対象物検出装置。
【請求項3】
前記センサは、所定の時間間隔でインパルス信号を生成する生成部と、前記インパルス信号を放射する放射部と、前記放射されたインパルス信号が検出対象により反射された反射信号を受信する受信部と、前記インパルス信号と前記反射信号とにより変動する電気信号を生成する検波部とを有する請求項2に記載の対象物検出装置。
【請求項4】
前記放射部は、電磁波または光によりインパルス信号を放射し、前記受信部は、電磁波または光の反射信号を受信する請求項3に記載の対象物検出装置。
【請求項5】
前記センサは、建物の出入り口の開閉操作手段、車両の乗降口の開閉操作手段、船舶の乗降口の開閉操作手段、旅客運搬手段の乗降口の開閉操作手段、輸送手段の出入り口の開閉操作手段、または、所定の操作対象物を操作する操作手段の内部に埋め込まれている請求項2から4のいずれかに記載の対象物検出装置。
【請求項6】
前記センサは、建物の出入り口の開閉機能を提供する操作手段が設置される出入り口開閉部外壁内、車両の乗降口の開閉操作手段が設置される乗降口開閉部外壁内、船舶の乗降口の開閉操作手段が設置される乗降口開閉部外壁内、旅客運搬手段の乗降口の開閉機能を提供する操作手段が設置される乗降口開閉部外壁内、輸送手段の出入り口の開閉機能を提供する操作手段が設置される出入り口開閉部外壁内、または、所定の操作対象物を操作する機能を提供する操作手段が設置される筐体内に設けられている請求項2から4のいずれかに記載の対象物検出装置。
【請求項1】
検出対象の接近に伴い変動する電気信号を生成するセンサに接続され、前記電気信号を処理する処理装置であり、
前記検出対象の接近に伴い変動する電気信号と前記電気信号よりも周波数の高い高周波信号とが重畳した信号から前記電気信号を抽出する手段と、
前記電気信号の波形から前記検出対象の接近を判定する手段とを備える処理装置。
【請求項2】
検出対象の接近に伴い変動する電気信号を生成するセンサと、
前記検出対象の接近に伴い変動する電気信号と前記電気信号よりも周波数の高い高周波信号とが重畳した信号から前記電気信号を抽出する手段と、
前記電気信号の波形から前記検出対象の接近を判定する手段とを備える対象物検出装置。
【請求項3】
前記センサは、所定の時間間隔でインパルス信号を生成する生成部と、前記インパルス信号を放射する放射部と、前記放射されたインパルス信号が検出対象により反射された反射信号を受信する受信部と、前記インパルス信号と前記反射信号とにより変動する電気信号を生成する検波部とを有する請求項2に記載の対象物検出装置。
【請求項4】
前記放射部は、電磁波または光によりインパルス信号を放射し、前記受信部は、電磁波または光の反射信号を受信する請求項3に記載の対象物検出装置。
【請求項5】
前記センサは、建物の出入り口の開閉操作手段、車両の乗降口の開閉操作手段、船舶の乗降口の開閉操作手段、旅客運搬手段の乗降口の開閉操作手段、輸送手段の出入り口の開閉操作手段、または、所定の操作対象物を操作する操作手段の内部に埋め込まれている請求項2から4のいずれかに記載の対象物検出装置。
【請求項6】
前記センサは、建物の出入り口の開閉機能を提供する操作手段が設置される出入り口開閉部外壁内、車両の乗降口の開閉操作手段が設置される乗降口開閉部外壁内、船舶の乗降口の開閉操作手段が設置される乗降口開閉部外壁内、旅客運搬手段の乗降口の開閉機能を提供する操作手段が設置される乗降口開閉部外壁内、輸送手段の出入り口の開閉機能を提供する操作手段が設置される出入り口開閉部外壁内、または、所定の操作対象物を操作する機能を提供する操作手段が設置される筐体内に設けられている請求項2から4のいずれかに記載の対象物検出装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【国際公開番号】WO2005/045473
【国際公開日】平成17年5月19日(2005.5.19)
【発行日】平成19年5月17日(2007.5.17)
【国際特許分類】
【出願番号】特願2005−515356(P2005−515356)
【国際出願番号】PCT/JP2004/016639
【国際出願日】平成16年11月10日(2004.11.10)
【出願人】(000002945)オムロン株式会社 (3,542)
【Fターム(参考)】
【国際公開日】平成17年5月19日(2005.5.19)
【発行日】平成19年5月17日(2007.5.17)
【国際特許分類】
【国際出願番号】PCT/JP2004/016639
【国際出願日】平成16年11月10日(2004.11.10)
【出願人】(000002945)オムロン株式会社 (3,542)
【Fターム(参考)】
[ Back to top ]