
処理装置
【課題】ATCRBSトランスポンダが送信した応答信号がモードAコード又はモードCコードのいずれであるかを容易に識別する。
【解決手段】処理装置は、入力手段と、測位手段と、変換手段と、判定手段とを備える。入力手段は、受信装置が受信したATCRBSトランスポンダを搭載する航空機から送信された応答信号及び受信装置における当該応答信号の受信時刻を複数の受信装置から入力する。測位手段は、入力した応答信号及び受信時刻から、同一の応答信号の各受信装置での受信時刻を利用し、当該応答信号を送信した航空機の座標及び高度を特定する位置を測位する。変換手段は、入力した応答信号を高度に変換する。判定手段は、測位された位置に含まれる航空機の高度と、応答信号から変換された高度とが所定の相関範囲内であるとき当該応答信号はモードCコードであり、所定の相関範囲内でないとき当該応答信号はモードAコードであると判定する。
【解決手段】処理装置は、入力手段と、測位手段と、変換手段と、判定手段とを備える。入力手段は、受信装置が受信したATCRBSトランスポンダを搭載する航空機から送信された応答信号及び受信装置における当該応答信号の受信時刻を複数の受信装置から入力する。測位手段は、入力した応答信号及び受信時刻から、同一の応答信号の各受信装置での受信時刻を利用し、当該応答信号を送信した航空機の座標及び高度を特定する位置を測位する。変換手段は、入力した応答信号を高度に変換する。判定手段は、測位された位置に含まれる航空機の高度と、応答信号から変換された高度とが所定の相関範囲内であるとき当該応答信号はモードCコードであり、所定の相関範囲内でないとき当該応答信号はモードAコードであると判定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施形態は、航空機が送信する応答を受信して航空機を監視する広域マルチラテレーションシステムで利用する処理装置に関する。
【背景技術】
【0002】
航空機の飛行の監視には、航空機に質問信号を送信し、これに対して航空機のトランスポンダから送信される応答信号を受信し、応答信号を解析して航空機を監視するモードS二次監視レーダ(SSRモードS:Secondary Surveillance Radar Mode S)等のレーダ装置が利用されている。
【0003】
また、近年では、航空機の応答信号を複数の受信装置で受信し、各受信装置での受信時刻の差を利用して航空機の位置を測位するとともに、航空機に対して質問信号を送信して例えばモードAコード等の必要なデータを取得する広域マルチラテレーションシステム(WAM:Wide Area Multilateration)の開発も進められている。
【0004】
ここで、航空機に搭載されるトランスポンダにはモードSトランスポンダとATCRBSトランスポンダの2種類がある。ATCRBSトランスポンダが送信する応答信号には、モードAコードとモードCコードとがあるが、応答信号にはモードAコード又はモードCコードを識別する情報は含まれていない。
【0005】
すなわち、ATCRBSトランスポンダは、レーダ装置からの質問信号がモードA質問であるとき、モードAコードを応答信号として送信し、質問信号がモードC質問であるときモードCコードを応答信号として送信する。したがって、レーダ装置ではモードAコード又はモードCコードのいずれを応答信号として受信するかを把握しているため、レーダ装置及びトランスポンダ間では、モードAコード又はモードCコードを識別する情報の送信は不要であるためである。
【0006】
したがって、ATCRBSトランスポンダが二次監視レーダに対して送信した応答信号を広域マルチラテレーションシステムにおいて利用する場合、応答信号がモードAコード又はモードCコードのいずれであるかを識別する必要がある。
【先行技術文献】
【非特許文献】
【0007】
【非特許文献1】Michael C. Stevens “Secondary Surveillance Radar” 1988, ISBN 0-89006-292-7.
【発明の概要】
【発明が解決しようとする課題】
【0008】
本発明は、広域マルチラテレーションシステムで利用する処理装置において、ATCRBSトランスポンダが送信した応答信号がモードAコード又はモードCコードのいずれであるかを容易に識別する処理装置を提供する。
【課題を解決するための手段】
【0009】
本発明の実施形態に係る処理装置は、入力手段と、測位手段と、変換手段と、判定手段とを備える。入力手段は、受信装置が受信したATCRBSトランスポンダを搭載する航空機から送信された応答信号及び受信装置における当該応答信号の受信時刻を複数の受信装置から入力する。測位手段は、入力した応答信号及び受信時刻から、同一の応答信号の各受信装置での受信時刻を利用し、当該応答信号を送信した航空機の座標及び高度を特定する位置を測位する。変換手段は、入力した応答信号を高度に変換する。判定手段は、測位された位置に含まれる航空機の高度と、応答信号から変換された高度とが所定の相関範囲内であるとき当該応答信号はモードCコードであり、所定の相関範囲内でないとき当該応答信号はモードAコードであると判定する。
【図面の簡単な説明】
【0010】
【図1】実施形態に係る処理装置について説明するブロック図である。
【図2】図1処理装置における処理の一例を説明するフローチャートである。
【発明を実施するための形態】
【0011】
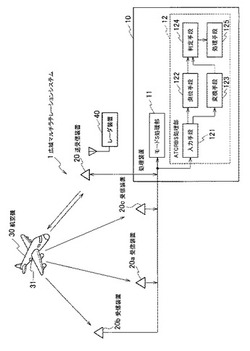
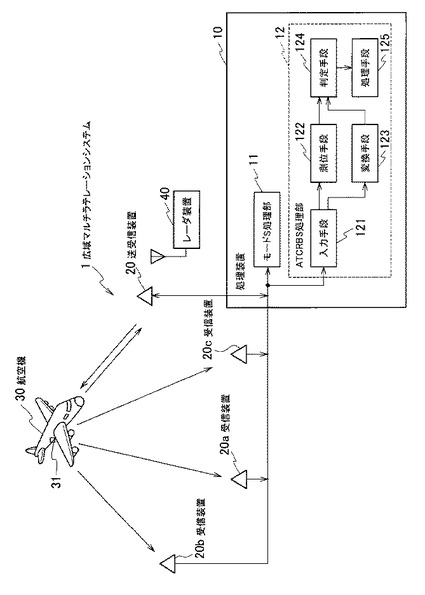
以下に、図面を用いて実施形態に係る処理装置について説明する。図1に示すように、実施形態に係る処理装置10は、広域マルチラテレーションシステム1で利用される装置であって、航空機30に搭載されるトランスポンダ31が送信する信号を入力して処理する装置である。この処理装置10は、レーダ装置40からの質問信号に対してトランスポンダ31から送信された応答信号を受信する少なくとも4台の装置20,20a〜20cと接続されている。処理装置10は、複数の装置20,20a〜20cにおける応答信号の受信時刻の差を利用して当該応答信号を送信した航空機30の位置を測位することができる。
【0012】
なお、図1に示す例では、複数の装置20,20a〜20cのうち1つは、信号の受信の他、信号の送信も可能な送受信装置20となっている。また、図1に示す例では、処理装置10と接続される装置20,20a〜20cは4台であるが、4台以上であればその数は限定されず、応答信号を受信する装置の数が多い程、測位される航空機30の位置が正確かつブラインド領域がなくなる。
【0013】
図1に示すように、処理装置10は、送受信装置20及び受信装置20a〜20cと接続されており、各装置20,20a〜20cから航空機30のトランスポンダ31が送信した応答信号及びこの応答信号の各装置20,20a〜20cでの受信時刻を入力する。処理装置10は、モードS処理部11とATCRBS処理部12とを備えており、入力した応答信号及び受信時刻のうち、モードSトランスポンダから送信された応答信号及び受信時刻とはモードS処理部11で処理され、ATCRBSトランスポンダから送信された応答信号及び受信時刻とはATCRBS処理部12で処理される。ここで、モードSトランスポンダから送信された応答信号及び受信時刻の処理については従来と同様であるため、モードS処理部11についての説明は省略する。
【0014】
ATCRBS処理部12は、図1に示すように、各装置20,20a〜20cから応答信号及び受信時刻を入力する入力手段121と、複数の受信時刻を利用して応答信号を送信した時点での航空機30の位置を測位する測位手段122と、応答信号を高度に変換する変換手段123と、変換手段123で変換された高度が測位手段122で測位された位置と相関の範囲内かに応じて応答信号の種別を判定する判定手段124と、判定結果に応じて航空機データを生成する処理手段125とを備えている。
【0015】
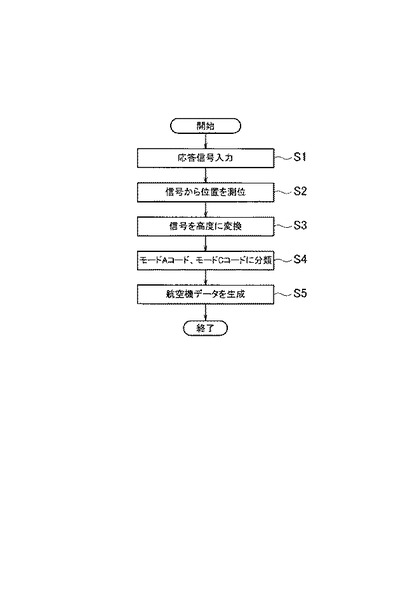
図2に示すフローチャートにあるように、ATCRBS処理部12では、まず、入力手段121が、各装置20,20a〜20cから応答信号及び受信時刻を入力する(S1)。具体的には、入力手段121は、送受信装置20及び受信装置20a〜20cから、各装置20,20a〜20cが受信したATCRBSトランスポンダを搭載する航空機の応答信号及びこの応答信号の受信時刻を入力する。また、入力手段121は、入力した応答信号及び受信時刻を測位手段122及び変換手段123へ出力する。ここで、入力手段121が入力する応答信号は、フライトプラン情報であるモードAコード又は高度情報であるモードCコードのいずれかであるが、入力手段121が入力した時点ではいずれであるか識別されていない。
【0016】
応答信号及び受信時刻を入力した測位手段122は、各装置20,20a〜20cにおける同一の応答信号の受信時刻の差を利用して、応答信号送信時の航空機30の位置(座標及び高度)を測位する(S2)。また、測位手段122は、測位結果を判定手段124に出力する。ここで、測位手段122は、異なる4箇所の装置20,20a〜20cにおける受信時刻を入力しているため、航空機の座標に加えて高度を特定する位置を求めることができる。
【0017】
なお、いずれかの装置20,20a〜20cで応答信号が受信されず、4箇所での受信時刻を取得できていない場合、測位手段122は、座標及び高度を測位できないため、測位不可である旨の測位結果を出力する。
【0018】
また、応答信号及び受信時刻を入力した変換手段123は、応答信号を高度に変換する(S3)。具体的には、変換手段123は、応答信号を高度情報であるモードCコードと仮定して応答信号を高度に変換(feet変換)し、変換結果を判定手段124に出力する。
【0019】
ATCRBSトランスポンダから送信される応答信号はフライトプラン情報であるモードAコード又は高度情報であるモードCコードのいずれかである。したがって、応答信号がモードAコードであるとき、変換手段123による変換によって意味のない情報が得られるが、応答信号がモードCコードであれば、変換手段123によって得られる情報は、正しい高度情報である。なお、ステップS2及びS3の処理の順序はいずれが先でもよく、並列して実行することもできる。
【0020】
測位手段122から測位結果を入力するとともに、変換手段123から変換結果を入力した判定手段124は、ステップS2で測位手段122により受信時刻から測位された位置に含まれる高度と、ステップS3で変換手段123により応答信号から変換された高度とが所定の相関範囲内であるかを判定し、判定結果に基づいて応答信号がモードAコードであるか又はモードCコードであるか否かを分類する(S4)。
【0021】
すなわち、応答信号がモードCコードであれば、応答信号の受信時刻から測位された高度と、応答信号から変換された高度とが、誤差はあるものの、略一致すると考えられるためである。したがって、判定手段124で判定に利用する相関範囲は、測位手段122で測位される高度の誤差の範囲によって定められる。また、判定手段124は、相関範囲内である場合には対象の応答信号はモードCコードであると判定し、相関範囲内でない場合には対象の応答信号はモードAコードであると判定する。その後、判定手段124は、応答信号に、この応答信号から測位された位置及びこの応答信号がモードAコード又はモードCコードのいずれであるかの判定結果を関連づけた応答信号データを処理手段125に出力する。
【0022】
例えば、入力手段121は、複数の応答信号及び受信時刻を入力すると、入力した応答信号から同一の応答信号を選択し、応答信号に全ての装置での受信時刻関連づけて測位手段122及び変換手段123へ出力することで、測位手段122及び変換手段123で同一の応答信号についての処理を容易にすることができる。
【0023】
応答信号データを入力した処理手段125は、入力した応答信号データから必要なモードAコード及びモードCコードを使用して航空機データを生成する(S5)。このとき、処理手段125は、入力する応答信号データから、同一の航空機30から送信された応答信号に関する応答データを抽出して航空機データを生成し、それ以外の応答データは不要な信号として破棄する。
【0024】
レーダ装置40は、モードA質問とモードC質問とを決められたパターン(例えば、交互)で送信する。したがって、航空機30も、レーダ装置40に合わせて、モードAコードとモードCコードとを決められたパターンで送信する。例えば、モードAコードとモードCコードが交互に送信される場合、モードAコードを送信した位置とモードCコードを送信した位置とは異なるものの、この位置の差は航空機30が移動可能な範囲内である。したがって、処理手段125は、航空機30による応答信号の送信パターンと航空機30が移動可能な範囲から、同一の航空機30が連続して送信したモードAコードとモードCコードを特定することができ、同一の航空機30が送信した応答信号(モードAコード、モードCコード)を含む応答データを選択することができる。一方、このような連続して送信されていないモードAコードとモードCコードを含む応答データについては、処理することはできないため、処理手段125は、不要なデータとして破棄する。したがって、処理手段125で必要な応答データを選択することで、処理装置10は、信頼性の高い応答信号のみを利用することができる。
【0025】
広域マルチラテレーションシステム1では、処理装置10のモードS処理部11で得られた応答信号の処理結果と、上述したように処理装置10のATCRBS処理部12で得られた応答信号の処理結果(航空機データ)とを利用して航空機30を監視することができる。なお、広域マルチラテレーションシステム1における航空機30の監視に関する処理は処理装置10内で実行してもよいし、処理装置10とは別に設けた装置(図示せず)で実行してもよい。
【0026】
上述したように、実施形態に係る処理装置10は、同一の応答信号の異なる場所での受信時刻の差を利用して測位により得られる高度と、応答信号の変換により得られる高度とを比較して、ATCRBSトランスポンダから得られる応答信号をモードAコードとモードCコードとに分類することができる。したがって、広域マルチラテレーションシステム1においてモードAコード又はモードCコードの種別を含まないATCRBSトランスポンダから受信する応答信号の有効利用が可能となる。
【0027】
また、処理装置10は、測位により得られる高度と、変換により得られる高度とを比較して、相関範囲内の応答信号のみを利用する。したがって、広域マルチラテレーションシステム1において応答信号から正確な測位結果が得られない場合や誤りを含む応答信号を変換した場合にはこれらの応答信号は使用しないため、信頼性の高いデータのみを利用することが可能となる。
【0028】
上記のように、本発明を実施形態によって記載したが、この開示の一部をなす論述および図面はこの発明を限定するものであると理解すべきではない。この開示から当業者には様々な代替実施形態、実施例および運用技術が明らかとなる。また、本発明はここでは記載していない様々な実施形態等を含むことは勿論である。
【符号の説明】
【0029】
1…広域マルチラテレーションシステム
10…処理装置
11…処理部
12…ATCRBS処理部
121…入力手段
122…測位手段
123…変換手段
124…判定手段
125…処理手段
20…送受信装置
20a〜20c…受信装置
30…航空機
31…トランスポンダ
40…レーダ装置
【技術分野】
【0001】
本発明の実施形態は、航空機が送信する応答を受信して航空機を監視する広域マルチラテレーションシステムで利用する処理装置に関する。
【背景技術】
【0002】
航空機の飛行の監視には、航空機に質問信号を送信し、これに対して航空機のトランスポンダから送信される応答信号を受信し、応答信号を解析して航空機を監視するモードS二次監視レーダ(SSRモードS:Secondary Surveillance Radar Mode S)等のレーダ装置が利用されている。
【0003】
また、近年では、航空機の応答信号を複数の受信装置で受信し、各受信装置での受信時刻の差を利用して航空機の位置を測位するとともに、航空機に対して質問信号を送信して例えばモードAコード等の必要なデータを取得する広域マルチラテレーションシステム(WAM:Wide Area Multilateration)の開発も進められている。
【0004】
ここで、航空機に搭載されるトランスポンダにはモードSトランスポンダとATCRBSトランスポンダの2種類がある。ATCRBSトランスポンダが送信する応答信号には、モードAコードとモードCコードとがあるが、応答信号にはモードAコード又はモードCコードを識別する情報は含まれていない。
【0005】
すなわち、ATCRBSトランスポンダは、レーダ装置からの質問信号がモードA質問であるとき、モードAコードを応答信号として送信し、質問信号がモードC質問であるときモードCコードを応答信号として送信する。したがって、レーダ装置ではモードAコード又はモードCコードのいずれを応答信号として受信するかを把握しているため、レーダ装置及びトランスポンダ間では、モードAコード又はモードCコードを識別する情報の送信は不要であるためである。
【0006】
したがって、ATCRBSトランスポンダが二次監視レーダに対して送信した応答信号を広域マルチラテレーションシステムにおいて利用する場合、応答信号がモードAコード又はモードCコードのいずれであるかを識別する必要がある。
【先行技術文献】
【非特許文献】
【0007】
【非特許文献1】Michael C. Stevens “Secondary Surveillance Radar” 1988, ISBN 0-89006-292-7.
【発明の概要】
【発明が解決しようとする課題】
【0008】
本発明は、広域マルチラテレーションシステムで利用する処理装置において、ATCRBSトランスポンダが送信した応答信号がモードAコード又はモードCコードのいずれであるかを容易に識別する処理装置を提供する。
【課題を解決するための手段】
【0009】
本発明の実施形態に係る処理装置は、入力手段と、測位手段と、変換手段と、判定手段とを備える。入力手段は、受信装置が受信したATCRBSトランスポンダを搭載する航空機から送信された応答信号及び受信装置における当該応答信号の受信時刻を複数の受信装置から入力する。測位手段は、入力した応答信号及び受信時刻から、同一の応答信号の各受信装置での受信時刻を利用し、当該応答信号を送信した航空機の座標及び高度を特定する位置を測位する。変換手段は、入力した応答信号を高度に変換する。判定手段は、測位された位置に含まれる航空機の高度と、応答信号から変換された高度とが所定の相関範囲内であるとき当該応答信号はモードCコードであり、所定の相関範囲内でないとき当該応答信号はモードAコードであると判定する。
【図面の簡単な説明】
【0010】
【図1】実施形態に係る処理装置について説明するブロック図である。
【図2】図1処理装置における処理の一例を説明するフローチャートである。
【発明を実施するための形態】
【0011】
以下に、図面を用いて実施形態に係る処理装置について説明する。図1に示すように、実施形態に係る処理装置10は、広域マルチラテレーションシステム1で利用される装置であって、航空機30に搭載されるトランスポンダ31が送信する信号を入力して処理する装置である。この処理装置10は、レーダ装置40からの質問信号に対してトランスポンダ31から送信された応答信号を受信する少なくとも4台の装置20,20a〜20cと接続されている。処理装置10は、複数の装置20,20a〜20cにおける応答信号の受信時刻の差を利用して当該応答信号を送信した航空機30の位置を測位することができる。
【0012】
なお、図1に示す例では、複数の装置20,20a〜20cのうち1つは、信号の受信の他、信号の送信も可能な送受信装置20となっている。また、図1に示す例では、処理装置10と接続される装置20,20a〜20cは4台であるが、4台以上であればその数は限定されず、応答信号を受信する装置の数が多い程、測位される航空機30の位置が正確かつブラインド領域がなくなる。
【0013】
図1に示すように、処理装置10は、送受信装置20及び受信装置20a〜20cと接続されており、各装置20,20a〜20cから航空機30のトランスポンダ31が送信した応答信号及びこの応答信号の各装置20,20a〜20cでの受信時刻を入力する。処理装置10は、モードS処理部11とATCRBS処理部12とを備えており、入力した応答信号及び受信時刻のうち、モードSトランスポンダから送信された応答信号及び受信時刻とはモードS処理部11で処理され、ATCRBSトランスポンダから送信された応答信号及び受信時刻とはATCRBS処理部12で処理される。ここで、モードSトランスポンダから送信された応答信号及び受信時刻の処理については従来と同様であるため、モードS処理部11についての説明は省略する。
【0014】
ATCRBS処理部12は、図1に示すように、各装置20,20a〜20cから応答信号及び受信時刻を入力する入力手段121と、複数の受信時刻を利用して応答信号を送信した時点での航空機30の位置を測位する測位手段122と、応答信号を高度に変換する変換手段123と、変換手段123で変換された高度が測位手段122で測位された位置と相関の範囲内かに応じて応答信号の種別を判定する判定手段124と、判定結果に応じて航空機データを生成する処理手段125とを備えている。
【0015】
図2に示すフローチャートにあるように、ATCRBS処理部12では、まず、入力手段121が、各装置20,20a〜20cから応答信号及び受信時刻を入力する(S1)。具体的には、入力手段121は、送受信装置20及び受信装置20a〜20cから、各装置20,20a〜20cが受信したATCRBSトランスポンダを搭載する航空機の応答信号及びこの応答信号の受信時刻を入力する。また、入力手段121は、入力した応答信号及び受信時刻を測位手段122及び変換手段123へ出力する。ここで、入力手段121が入力する応答信号は、フライトプラン情報であるモードAコード又は高度情報であるモードCコードのいずれかであるが、入力手段121が入力した時点ではいずれであるか識別されていない。
【0016】
応答信号及び受信時刻を入力した測位手段122は、各装置20,20a〜20cにおける同一の応答信号の受信時刻の差を利用して、応答信号送信時の航空機30の位置(座標及び高度)を測位する(S2)。また、測位手段122は、測位結果を判定手段124に出力する。ここで、測位手段122は、異なる4箇所の装置20,20a〜20cにおける受信時刻を入力しているため、航空機の座標に加えて高度を特定する位置を求めることができる。
【0017】
なお、いずれかの装置20,20a〜20cで応答信号が受信されず、4箇所での受信時刻を取得できていない場合、測位手段122は、座標及び高度を測位できないため、測位不可である旨の測位結果を出力する。
【0018】
また、応答信号及び受信時刻を入力した変換手段123は、応答信号を高度に変換する(S3)。具体的には、変換手段123は、応答信号を高度情報であるモードCコードと仮定して応答信号を高度に変換(feet変換)し、変換結果を判定手段124に出力する。
【0019】
ATCRBSトランスポンダから送信される応答信号はフライトプラン情報であるモードAコード又は高度情報であるモードCコードのいずれかである。したがって、応答信号がモードAコードであるとき、変換手段123による変換によって意味のない情報が得られるが、応答信号がモードCコードであれば、変換手段123によって得られる情報は、正しい高度情報である。なお、ステップS2及びS3の処理の順序はいずれが先でもよく、並列して実行することもできる。
【0020】
測位手段122から測位結果を入力するとともに、変換手段123から変換結果を入力した判定手段124は、ステップS2で測位手段122により受信時刻から測位された位置に含まれる高度と、ステップS3で変換手段123により応答信号から変換された高度とが所定の相関範囲内であるかを判定し、判定結果に基づいて応答信号がモードAコードであるか又はモードCコードであるか否かを分類する(S4)。
【0021】
すなわち、応答信号がモードCコードであれば、応答信号の受信時刻から測位された高度と、応答信号から変換された高度とが、誤差はあるものの、略一致すると考えられるためである。したがって、判定手段124で判定に利用する相関範囲は、測位手段122で測位される高度の誤差の範囲によって定められる。また、判定手段124は、相関範囲内である場合には対象の応答信号はモードCコードであると判定し、相関範囲内でない場合には対象の応答信号はモードAコードであると判定する。その後、判定手段124は、応答信号に、この応答信号から測位された位置及びこの応答信号がモードAコード又はモードCコードのいずれであるかの判定結果を関連づけた応答信号データを処理手段125に出力する。
【0022】
例えば、入力手段121は、複数の応答信号及び受信時刻を入力すると、入力した応答信号から同一の応答信号を選択し、応答信号に全ての装置での受信時刻関連づけて測位手段122及び変換手段123へ出力することで、測位手段122及び変換手段123で同一の応答信号についての処理を容易にすることができる。
【0023】
応答信号データを入力した処理手段125は、入力した応答信号データから必要なモードAコード及びモードCコードを使用して航空機データを生成する(S5)。このとき、処理手段125は、入力する応答信号データから、同一の航空機30から送信された応答信号に関する応答データを抽出して航空機データを生成し、それ以外の応答データは不要な信号として破棄する。
【0024】
レーダ装置40は、モードA質問とモードC質問とを決められたパターン(例えば、交互)で送信する。したがって、航空機30も、レーダ装置40に合わせて、モードAコードとモードCコードとを決められたパターンで送信する。例えば、モードAコードとモードCコードが交互に送信される場合、モードAコードを送信した位置とモードCコードを送信した位置とは異なるものの、この位置の差は航空機30が移動可能な範囲内である。したがって、処理手段125は、航空機30による応答信号の送信パターンと航空機30が移動可能な範囲から、同一の航空機30が連続して送信したモードAコードとモードCコードを特定することができ、同一の航空機30が送信した応答信号(モードAコード、モードCコード)を含む応答データを選択することができる。一方、このような連続して送信されていないモードAコードとモードCコードを含む応答データについては、処理することはできないため、処理手段125は、不要なデータとして破棄する。したがって、処理手段125で必要な応答データを選択することで、処理装置10は、信頼性の高い応答信号のみを利用することができる。
【0025】
広域マルチラテレーションシステム1では、処理装置10のモードS処理部11で得られた応答信号の処理結果と、上述したように処理装置10のATCRBS処理部12で得られた応答信号の処理結果(航空機データ)とを利用して航空機30を監視することができる。なお、広域マルチラテレーションシステム1における航空機30の監視に関する処理は処理装置10内で実行してもよいし、処理装置10とは別に設けた装置(図示せず)で実行してもよい。
【0026】
上述したように、実施形態に係る処理装置10は、同一の応答信号の異なる場所での受信時刻の差を利用して測位により得られる高度と、応答信号の変換により得られる高度とを比較して、ATCRBSトランスポンダから得られる応答信号をモードAコードとモードCコードとに分類することができる。したがって、広域マルチラテレーションシステム1においてモードAコード又はモードCコードの種別を含まないATCRBSトランスポンダから受信する応答信号の有効利用が可能となる。
【0027】
また、処理装置10は、測位により得られる高度と、変換により得られる高度とを比較して、相関範囲内の応答信号のみを利用する。したがって、広域マルチラテレーションシステム1において応答信号から正確な測位結果が得られない場合や誤りを含む応答信号を変換した場合にはこれらの応答信号は使用しないため、信頼性の高いデータのみを利用することが可能となる。
【0028】
上記のように、本発明を実施形態によって記載したが、この開示の一部をなす論述および図面はこの発明を限定するものであると理解すべきではない。この開示から当業者には様々な代替実施形態、実施例および運用技術が明らかとなる。また、本発明はここでは記載していない様々な実施形態等を含むことは勿論である。
【符号の説明】
【0029】
1…広域マルチラテレーションシステム
10…処理装置
11…処理部
12…ATCRBS処理部
121…入力手段
122…測位手段
123…変換手段
124…判定手段
125…処理手段
20…送受信装置
20a〜20c…受信装置
30…航空機
31…トランスポンダ
40…レーダ装置
【特許請求の範囲】
【請求項1】
レーダ装置からの質問信号に対して航空機から送信された応答信号を受信する少なくとも4台の異なる場所に設置される受信装置と、複数の前記受信装置における応答信号の受信時刻の差を利用して当該応答信号を送信した時点の航空機の位置を測位する処理装置とが接続される広域マルチラテレーションシステムで利用される前記処理装置であって、
受信装置が受信したATCRBSトランスポンダを搭載する航空機から送信された応答信号及び前記受信装置における当該応答信号の受信時刻を少なくとも4台の異なる場所に設置される受信装置から入力する入力手段と、
前記入力手段が入力した応答信号及び受信時刻から、同一の応答信号の各受信装置での受信時刻を利用し、当該応答信号を送信した航空機の座標及び高度を特定する位置を測位する測位手段と、
前記入力手段が入力した応答信号を高度に変換する変換手段と、
前記測位手段で測位された位置に含まれる航空機の高度と、前記変換手段で応答信号から変換された高度とが所定の相関範囲内であるとき当該応答信号はモードCコードであり、所定の相関範囲内でないとき当該応答信号はモードAコードであると判定する判定手段と、
を備えることを特徴とする処理装置。
【請求項1】
レーダ装置からの質問信号に対して航空機から送信された応答信号を受信する少なくとも4台の異なる場所に設置される受信装置と、複数の前記受信装置における応答信号の受信時刻の差を利用して当該応答信号を送信した時点の航空機の位置を測位する処理装置とが接続される広域マルチラテレーションシステムで利用される前記処理装置であって、
受信装置が受信したATCRBSトランスポンダを搭載する航空機から送信された応答信号及び前記受信装置における当該応答信号の受信時刻を少なくとも4台の異なる場所に設置される受信装置から入力する入力手段と、
前記入力手段が入力した応答信号及び受信時刻から、同一の応答信号の各受信装置での受信時刻を利用し、当該応答信号を送信した航空機の座標及び高度を特定する位置を測位する測位手段と、
前記入力手段が入力した応答信号を高度に変換する変換手段と、
前記測位手段で測位された位置に含まれる航空機の高度と、前記変換手段で応答信号から変換された高度とが所定の相関範囲内であるとき当該応答信号はモードCコードであり、所定の相関範囲内でないとき当該応答信号はモードAコードであると判定する判定手段と、
を備えることを特徴とする処理装置。
【図1】


【図2】
【図2】
【公開番号】特開2012−247238(P2012−247238A)
【公開日】平成24年12月13日(2012.12.13)
【国際特許分類】
【出願番号】特願2011−117789(P2011−117789)
【出願日】平成23年5月26日(2011.5.26)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成24年12月13日(2012.12.13)
【国際特許分類】
【出願日】平成23年5月26日(2011.5.26)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]