
出会い頭衝突防止支援装置
【課題】自車両の周囲の情報提供範囲内に他車両が入ったことに基づいて出会い頭衝突の警告を行う装置において、車両の混雑度に応じて情報提供範囲を適切に制御する。
【解決手段】出会い頭衝突防止支援装置は、他車両から受信した電波に基づいて、自車両4の周囲の車両の混雑度の指標を取得し、取得した混雑度の指標に基づいて、車両4の周囲の車両の混雑度が高いほど、情報提供範囲を狭くし、混雑度が小さいほど、情報提供範囲を広くする。
【解決手段】出会い頭衝突防止支援装置は、他車両から受信した電波に基づいて、自車両4の周囲の車両の混雑度の指標を取得し、取得した混雑度の指標に基づいて、車両4の周囲の車両の混雑度が高いほど、情報提供範囲を狭くし、混雑度が小さいほど、情報提供範囲を広くする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、出会い頭衝突防止支援装置に関するものである。
【背景技術】
【0002】
従来、車両間の出会い頭衝突防止を支援するため、車車間通信によって相手車両の位置の情報を取得し、取得した位置の情報に基づいて、出会い頭衝突の危険がある場合に警告を行う装置が知られている(例えば、特許文献1、2参照)。このような出会い頭衝突防止支援装置には、他車両から当該車両の位置の情報を受信し、その位置情報と自車両の情報とを比較し、他車両が自車両の情報提供範囲内にあることに基づいて、出会い頭衝突の警告を行うものがある。従来、この情報提供範囲は固定範囲であった。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−9486号公報
【特許文献2】特開2005−227978号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
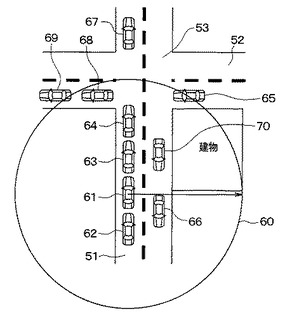
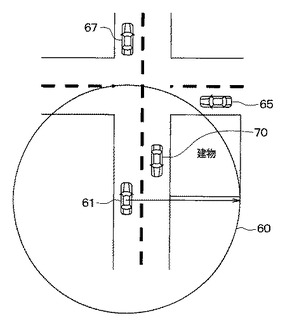
しかし、発明者の検討によれば、この情報提供範囲が固定であると、以下に示すような問題が発生する。すなわち、図11に示すように、道路51を走行する車両61の周囲に車両62〜64、66、70が密集していると、車両62〜64、66、70によって防護された状態にある車両61は、交差する道路52を走行する車両65と衝突する可能性が低い。したがって、車両65の存在に起因して出会い頭衝突の警告を行うタイミングは遅くてもよいが、情報提供範囲が固定であると、不必要な警告を行ってしまう可能性がある。
【0005】
一方、図12に示すように、車両61の周囲の車両が疎らな場合は、車両61が他の車両によって防護された状態にないので、車両65と衝突する可能性が比較的高くなる。したがって、車両65の存在に起因して出会い頭衝突の警告を行うタイミングを早くしたいが、情報提供範囲が固定であると、警告が遅れてしまう可能性がある。
【0006】
本発明は上記点に鑑み、自車両の周囲の情報提供範囲内に他車両が入ったことに基づいて出会い頭衝突の警告を行う装置において、車両の混雑度に応じて情報提供範囲を適切に制御することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するための請求項1に記載の発明は、第1の車両(4)に搭載される出会い頭衝突防止支援装置において、他の複数の車両のそれぞれから送信された電波を受信し、受信した電波中から他の複数の車両のそれぞれの位置の情報を含むパケットを取得する受信手段(11)と、他の複数の車両の位置の情報を、受信手段(11)が取得したパケットから読み出し、読み出した位置の情報に基づいて、第1の車両(4)を含む所定の情報提供範囲内に他の複数の車両のうち少なくとも1つがいるかを判定する判定手段(140、240、340)と、情報提供範囲内に他の複数の車両の少なくとも1つがいると判定手段(140、240、340)が判定したことに基づいて、出会い頭衝突に対する警告の報知を行う情報提供手段(150、160、250、260、350、360)と、受信手段(11)が他の複数の車両から受信した電波に基づいて、第1の車両(4)の周囲の車両の混雑度の指標を取得する混雑度指標取得手段(120、220、230)と、混雑度指標取得手段(120、220、230)が取得した混雑度の指標に基づいて、第1の車両(4)の周囲の車両の混雑度が高いほど、情報提供範囲を狭くする範囲決定手段(130、230、330)と、を備えたことを特徴とする。
【0008】
このように、出会い頭衝突防止支援装置は、第1の車両(4)の周囲の車両の混雑度の指標を取得し、取得した混雑度の指標に基づいて、第1の車両(4)の周囲の車両の混雑度が低いほど、情報提供範囲を狭くするので、車両の混雑度に応じて情報提供範囲を適切に制御することができる。
【0009】
また、請求項2に記載のように、他の複数の車両のそれぞれから送信されて受信手段(11)が受信する電波中のパケットは、他の複数の車両の位置の情報と共に他の複数の車両の走行方向の情報を含み、情報提供手段(150、160、250、260、350、360)は、情報提供範囲内に他の複数の車両の少なくとも1つがいると判定手段(140、240、340)が判定したことに基づいて、受信手段(11)が取得したパケット中の少なくとも1つの車両の走行方向の情報に基づいて、第1の車両(4)の走行方向と当該少なくとも1つの車両の走行方向が交差しているか否かを判定し、交差している車両がある場合に、出会い頭衝突に対する警告の報知を行うようになっていてもよい。
【0010】
このようになっている場合、混雑度が高いときに、情報提供範囲が狭くなるので、第1の車両(4)の走行方向と他の車両の走行方向が交差しているか否かを不必要に判定する可能性が低下し、その分、出会い頭衝突防止支援装置10の処理付加が低減する。
【0011】
また、請求項3に記載のように、他の複数の車両のそれぞれから送信されて受信手段(11)が受信する電波中の前記パケットは、それぞれ他の複数の車両の位置の情報と共に他の複数の車両の車両IDを含み、混雑度指標取得手段(120、220、230)は、第1の所定期間内に他の複数の車両から受信した車両IDの実数を、混雑度の指標として取得するようになっていてもよい。
【0012】
また、請求項4に記載のように、混雑度指標取得手段(120、220、230)は、第2の所定期間内に他の複数の車両から受信したパケットの平均受信電力を、混雑度の指標として取得するようになっていてもよい。
【0013】
また、請求項5に記載のように、混雑度指標取得手段(120、220、230)は、第3の所定期間内に他の複数の車両から受信したパケットのパケット誤り率を、混雑度の指標として取得するようになっていてもよい。
【0014】
なお、上記および特許請求の範囲における括弧内の符号は、特許請求の範囲に記載された用語と後述の実施形態に記載される当該用語を例示する具体物等との対応関係を示すものである。
【図面の簡単な説明】
【0015】
【図1】本発明の第1実施形態に係る出会い頭衝突防止支援の概要を示す模式図である。
【図2】車両に搭載される出会い頭衝突防止支援装置10の構成を示す図である。
【図3】制御装置13の構成を示す図である。
【図4】マイクロコンピュータ13cの処理の手順を示すフローチャートである。
【図5】自車両4の周囲が通常より混雑している場合の情報提供範囲42を示す図である。
【図6】自車両4の周囲が通常より疎らである場合の情報提供範囲43を示す図である。
【図7】第2実施形態における制御装置13の構成を示す図である。
【図8】第2実施形態におけるマイクロコンピュータ13cの処理の手順を示すフローチャートである。
【図9】第3実施形態における制御装置13の構成を示す図である。
【図10】第3実施形態におけるマイクロコンピュータ13cの処理の手順を示すフローチャートである。
【図11】車両61の周囲が混雑している場合を示す図である。
【図12】車両61の周囲が疎らな場合を示す図である。
【発明を実施するための形態】
【0016】
(第1実施形態)
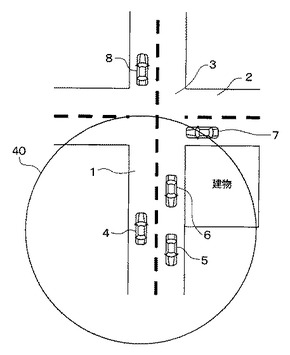
以下、本発明の第1実施形態について説明する。図1に例示するように、本実施形態は、道路1、2が交差する交差点3において、車両4〜8による出会い頭衝突の防止を支援することを目的とする。
【0017】
例えば、道路1から交差点3に進入しようとしている車両4は、道路2から交差点3に進入しようとしている車両7と出会い頭衝突を起こす恐れがあるので、ドライバに警告を行うことが好ましい。このような場合に、車両4および車両7に備えられた出会い頭衝突防止支援装置が、それぞれ当該車両4、7のドライバに対して警告を行うことで、車両4、7による出会い頭衝突の防止を支援する。
【0018】
このような出会い頭衝突の防止を支援するために、複数の車両(例えば図1では車両4〜8)のそれぞれに、図2に示すような出会い頭衝突防止支援装置10が搭載されている。これら出会い頭衝突防止支援装置10は、車車間無線通信によって、自車両の位置の情報および自車両の走行方向の情報を1つのパケットにまとめ、そのパケットを電波に含めて送信すると共に、他の複数の車両のそれぞれから送信された電波を受信し、受信した電波からパケットを取得し、取得したパケットに含まれる当該車両の位置の情報および当該車両の走行方向の情報を取得し、取得した情報に基づいて、ドライバに対して出会い頭衝突の警告を行うべきか否かを決定する。
【0019】
例えば、車両4(第1の車両の一例に相当する)の出会い頭衝突防止支援装置10は、自車両4を中心とする所定の情報提供範囲40内にある車両5〜7のそれぞれについて、自車両4と交差する方向に走行しているか否かを判定し、交差する方向に走行している車両が少なくとも1つあれば、自車両4のドライバに対して出会い頭衝突の警告を行う。本実施形態の特徴は、情報提供範囲40の大きさが変化することである。
【0020】
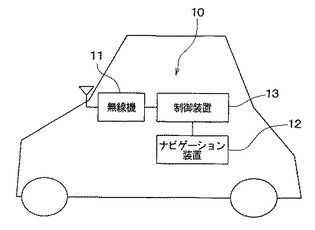
以下、この出会い頭衝突防止支援装置10の構成について説明する。図2に示すように、出会い頭衝突防止支援装置10は、無線機11、ナビゲーション装置12、制御装置13を有している。
【0021】
無線機11(受信手段の一例に相当する)は、車車間無線通信を実現するための装置であり、アンテナが受信した無線電波(データパケットを含む)に対して増幅、周波数変換、復調、A/D変換等、所定の無線通信プロトコル(例えばDSRC、携帯電話用データ通信)に従った処理を施し、その結果取得したデータパケット(以下、受信パケットという)を制御装置13に出力する。また無線機11は、制御装置13から受けた送信用のデータパケット(以下、送信パケットという)に対してD/A変換、変調、周波数変換、増幅等、所定の無線通信プロトコルに従った処理を施し、その結果の信号を上記のアンテナに出力する。これによって、送信パケットを含む無線電波が送信される。このような作動を行う無線機11を利用することで、制御装置13は、他車両の出会い頭衝突防止支援装置10の無線通信(すなわち車車間通信)を実現することができる。
【0022】
ナビゲーション装置12は、現在位置から目的地までの最適な経路を算出し、算出した経路に沿って車両が移動するよう案内する装置である。この案内は、車両内に搭載されたスピーカおよび画像表示装置を用いて、音声および画像で行うようになっている。またナビゲーション装置12は、GPS受信機、車速センサ、加速度センサ、ヨーレートセンサ等のセンサ群を備え、これらセンサ群からの信号に基づいて、自車両の現在位置、走行方向、走行速度等を特定するようになっている。
【0023】
またナビゲーション装置12は、制御装置13からの指令に応じて、上記スピーカに出力する音声の内容および画像表示装置に表示する画像の内容を制御するようになっている。またナビゲーション装置12は、制御装置13からの要求に応じて、現在の自車両の位置、走行方向、走行速度等の情報を制御装置13に出力するようになっている。
【0024】
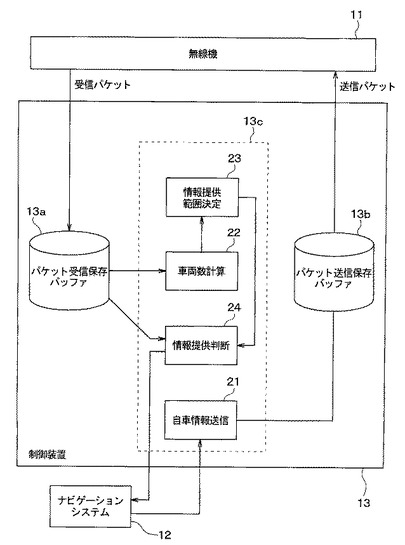
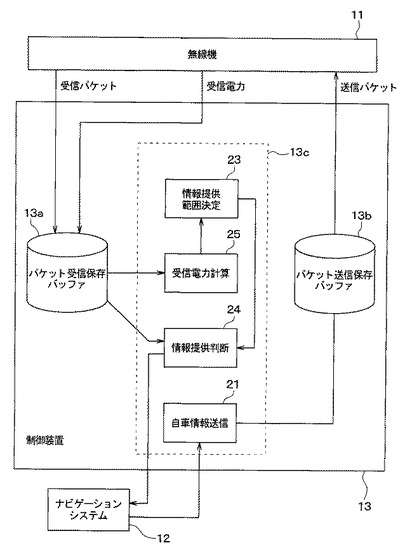
制御装置13は、パケット受信保存バッファ13a、パケット送信保存バッファ13b、およびマイクロコンピュータ13cを有している。パケット受信保存バッファ13aは、無線機11から制御装置13に出力された受信パケットを取得して蓄積する記憶装置である。なお、受信パケットの蓄積の際、その受信パケットを蓄積した時刻の情報を当該受信パケットに関連付けて記録する。受信パケットを蓄積した時刻は、実質的に無線機11が電波を受信して受信パケットを取得した時刻と同じである。したがって、このようにすることで、蓄積されている受信パケットをいつ受信したかがわかるようになる。
【0025】
パケット送信保存バッファ13bは、マイクロコンピュータ13cから出力された送信パケットを一時的に格納し、所定のタイミング(例えば100ミリ秒に1回)でその送信パケットを無線機11に出力する記憶装置である。
【0026】
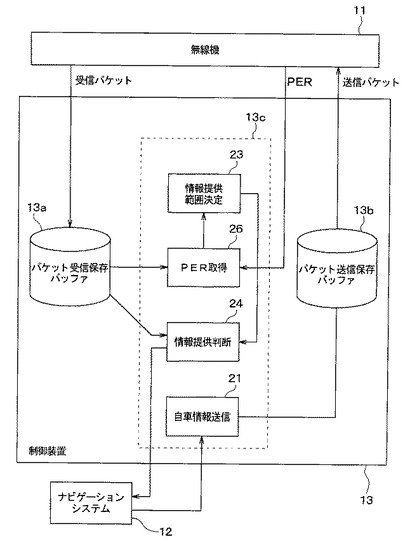
マイクロコンピュータ13cは、図示しないCPU、RAM、ROMを備え、CPUがROMに保存されているプログラムを実行することで、各種処理を実現する。具体的には、マイクロコンピュータ13cが実現する機能としては、自車情報送信機能21、車両数計算機能22、情報提供範囲決定機能23、情報提供判断機能24等がある。
【0027】
自車情報送信機能21は、自車両の情報を定期的に(例えば100ミリ秒毎に)無線送信する機能である。この自車情報送信機能21を実現するために、マイクロコンピュータ13cは、定期的に、ナビゲーション装置12に対して自車両の現在の位置および走行方向の情報を要求して取得し、また、ROMにあらかじめ記録されている自車両の車両IDの情報を読み出す。そして、これら自車両の車両ID、位置、および走行方向の情報を、1つの送信パケットに含め、パケット送信保存バッファ13bに出力する。これによって、パケット送信保存バッファ13bは、送信パケットを所定のタイミングで定期的に無線機11に出力するようになる。その結果、無線機11は、車両ID、自車位置、および自車両の走行方向の情報を含む送信パケットを、所定のタイミングで定期的に周囲の車両に、電波に含めて無線送信する。このような、車両の走行情報(具体的には、車両ID、自車位置、および自車両の走行方向)の情報を含む送信パケットを、車両情報パケットという。
【0028】
車両数計算機能22は、他車両から送信され、自車両の無線機11が受信して制御装置13のパケット受信保存バッファ13aに蓄積された車両情報パケット(すなわち受信パケット)中の車両IDに基づいて、自車両の周囲の車両の数を算出する機能である。
【0029】
この車両数計算機能22を実現するために、マイクロコンピュータ13cは、パケット受信保存バッファ13aから、現在から遡る所定期間(第1の所定期間に相当する)内において受信した受信パケットを読み出す。この所定期間は、出会い頭衝突防止支援装置10における車両情報パケットの送信周期よりも長い期間とする。
【0030】
そしてマイクロコンピュータ13cは、読み出した受信パケット中の車両IDの数をカウントする。この際、同じ値の車両IDが複数個あったとしても、それらは1個であるとカウントする。
【0031】
このようにカウントされた車両IDの数は、現在から遡る所定期間内において、自車両の通信可能範囲(例えば、自車両を中心とする半径300メートル〜400メートル程度の円の内部)から車両情報パケットを送信した車両の数(延べではなく実数)である。したがって、このようにカウントされた車両数は、自車両の通信可能範囲内の他車両の数であるので、自車両の周囲における車両の混雑度の指標となる。
【0032】
情報提供範囲決定機能23は、車両数計算機能22によって算出した車両数に基づいて、情報提供範囲を決定する機能である。情報提供範囲とは、その範囲外の車両を、出会い頭衝突の原因とみなす車両から除外するための範囲である。すなわち、マイクロコンピュータ13cは、情報提供範囲内の車両を、自車両と出会い頭衝突する可能性がある車両とみなす一方、情報提供範囲外の車両を、自車両と出会い頭衝突する可能性がある車両とみなさない。情報提供範囲は、自車両の通信可能範囲よりも狭い。
【0033】
この情報提供範囲決定機能23を実現するために、マイクロコンピュータ13cは、ROMに記録されている数−範囲テーブルを参照して、情報提供範囲を決定する。数−範囲テーブルは、車両数と情報提供範囲の大きさとの対応関係を規定するテーブルである。具体的には、数−範囲テーブルにおいては、車両数は、通常範囲、通常範囲よりも少ない疎範囲、通常範囲よりも多い混雑範囲の3つに分類されており、これら3つの車両数の範囲のそれぞれに、1つの情報提供範囲の大きさが対応付けられている。より具体的には、情報提供範囲は、自車両を中心とする円の内部とし、その円の半径で、情報提供範囲の大きさを規定するようになっている。そして、疎範囲に割り当てられる円の半径(例えば120メートル)は、通常範囲に割り当てられる円の半径(例えば100メートル)よりも大きく、混雑範囲に割り当てられる円の半径(例えば80メートル)は、通常範囲に割り当てられる円の半径よりも小さい。
【0034】
情報提供判断機能24は、情報提供範囲決定機能23によって決められた情報提供範囲と、受信パケット中の位置および走行方向の情報に基づいて、出会い頭衝突に対する警告(すなわち、情報提供)を行うか否かを決定し、警告を行うと決定した場合は、警告を実行する機能である。この機能の具体的な内容については後述する。
【0035】
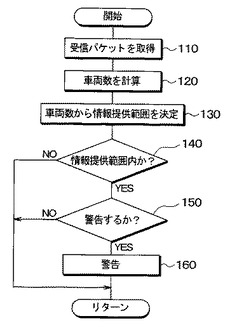
以下、車両数計算機能22、情報提供範囲決定機能23、および情報提供判断機能24に対応する機能の作動手順について、図4のフローチャートを用いて説明する。なお、自車情報送信機能21の機能は、図4のフローチャートの処理と並列的に実行されるようになっている。図4のステップ110、120の処理によって車両数計算機能22が実現し、ステップ130の処理によって情報提供範囲決定機能23が実現し、ステップ140〜160の処理によって情報提供判断機能24が実現する。
【0036】
マイクロコンピュータ13cは、自車両が基点ノードまで基準距離(例えば200メートル)以内に入ったときに、図4に示す処理の繰り返し実行を開始するようになっている。基点ノードとは、出会い頭衝突の発生の恐れが高いとみなされた交差点の位置である。基点ノードの位置は、あらかじめマイクロコンピュータ13cのROMに記録されている。そして、自車両の現在の位置は、ナビゲーション装置12に要求して取得する。
【0037】
マイクロコンピュータ13cは、この図4の処理の実行の各回において、まずステップ110で、現在から遡る所定期間内に受信した受信パケットを、パケット受信保存バッファ13aから読み出して取得する。続いてステップ120では、既に説明した通り、ステップ110で読み出した受信パケット中の車両IDの数(延べ数ではなく実数(すなわち異なり数))をカウントする。この車両IDの数は、既に説明した通り、自車両の通信可能範囲内における他車両の実数である。
【0038】
続いてステップ130では、上述の数−範囲テーブルを参照し、ステップ120でカウントした車両の実数に対応する情報提供範囲の大きさを決定する。
【0039】
続いてステップ140では、読み出した受信パケットのうち、今回のステップ140で新たに読み出した新しい受信パケットのそれぞれから、位置の情報を読み出し、それぞれの位置が、自車両を中心とする情報提供範囲内に入っているか否かを判定する。なお、自車両の位置は、ナビゲーション装置12に要求して取得する。そして、それらのうち1つでも情報提供範囲内に入っていると判定した場合は、続いてステップ150を実行し、それらのうち1つも情報提供範囲内にはいっていないと判定した場合は、ステップ150、160をバイパスして図4の1回分の処理を終了する。
【0040】
このようにステップ150、160をバイパスするのは、当該受信パケットの送信元の他車両と自車両との間の距離が十分離れているので、出会い頭衝突を警告するには尚早であるという観点に基づくものである。
【0041】
なお、「今回のステップ140で新たに読み出した新しい受信パケット」とは、図4に示す処理の繰り返し実行の開始後、2回目以降のステップ140の実行機会においては、前回のステップ140でも読み出した受信パケット以外のパケットとなり、図4に示す処理の繰り返し実行の開始後、初めてのステップ140の実行機会においては、読み出したすべての受信パケットとなる。
【0042】
ステップ150では、出会い頭衝突の警告(すなわち情報提供)をするか否かを判定する。具体的には、ステップ140で情報提供範囲内にあると判定した位置にある他車両のそれぞれについて、自車両の走行方向と当該他車両の走行方向とが交差している場合は警告するか否か判定し、1つでも交差している場合は警告すると判定し、1つも交差していない場合は警告しないと判定する。
【0043】
なお、自車両の走行方向は、ナビゲーション装置12に要求することで取得する。また、当該他車両の走行方向は、当該当該他車両から受信した受信パケット中の走行方向に基づいて決定する。
【0044】
また、自車両の走行方向と当該他車両の走行方向とが交差しているか否かについては、例えば、自車両の走行方向と他車両の走行方向が成す角θ(ただし0°≦θ≦180°)が、第1所定角度(例えば45°)以上第2所定角度(例えば135°)以下である場合に、自車両の走行方向と当該他車両の走行方向とが交差していると判定し、それ以外の場合に、自車両の走行方向と当該他車両の走行方向とが交差していないと判定してもよい。
【0045】
警告すると判定した場合は続いてステップ160で、ナビゲーション装置12に対して音声および画像で警告を行うよう指令する。ナビゲーション装置12は、この指令に応じて、出会い頭衝突の恐れがある旨を警告する音声(例えば、「出会い頭衝突に注意してください」という音声)をスピーカに出力させ、また、出会い頭衝突の恐れがある旨を警告する画像を画像表示装置に表示させる。この警告は、所定の時間(例えば10秒)継続してもよいし、自車両が交差点(より詳しくは基点ノード)の位置を通り過ぎるまで継続するようになっていてもよい。
【0046】
ステップ160の後、図4の1回分の処理を終了する。また、警告しないと判定した場合は、ステップ160の警告処理をバイパスして、図4の1回分の処理を終了する。
【0047】
以上説明した通り、本実施形態の出会い頭衝突防止支援装置10は、新たな受信パケットの送信元の他車両が1台でも情報提供範囲40内にあれば(ステップ140参照)、その情報提供範囲内の他車両の走行方向と自車両の走行方向とが交差しているか否かを判定し(ステップ150参照)、1台でも交差していれば出会い頭衝突の警告を行い、1台も交差していなければ出会い頭衝突の警告を行わないという作動を繰り返す。したがって、出会い頭衝突防止支援装置10は、自車両の走行方向と交差する方向に走行する他車両が情報提供範囲内に入ってこない間は、出会い頭衝突の警告を行わず、自車両の走行方向と交差する方向に走行する他車両が1台でも情報提供範囲内に入ってくれば、出会い頭衝突の警告を行う。
【0048】
例えば、図1に示すような場面において、車両4(第1の車両の一例に相当する)に搭載された出会い頭衝突防止支援装置10は、自車両4の情報提供範囲内に他車両7(第2の車両の一例に相当する)が進入したとき、当該他車両7から送信された車両情報パケットに基づいて、当該他車両7が情報提供範囲40内に入ったと判定し(ステップ140参照)、さらに、他車両7の走行方向が自車両の走行方向と交差すると判定し(ステップ150参照)、続いて警告を行う(ステップ160参照)。
【0049】
そして出会い頭衝突防止支援装置10は、現在から遡った所定期間内に受信した車両情報パケットの送信元の他車両の実数(すなわち、所定期間内に他の車両から受信した車両IDの実数)が、通常の範囲を超えている場合、すなわち、自車両の周囲で他車両が通常よりも混雑している場合、情報提供範囲を通常よりも小さくする。また、出会い頭衝突防止支援装置10は、現在から遡った所定期間内に受信した車両情報パケットの送信元の他車両の実数が、通常の範囲を下回っている場合、すなわち、自車両の周囲で他車両が通常よりも疎らである場合、情報提供範囲を通常よりも拡大する。
【0050】
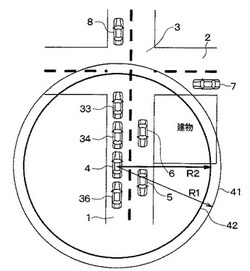
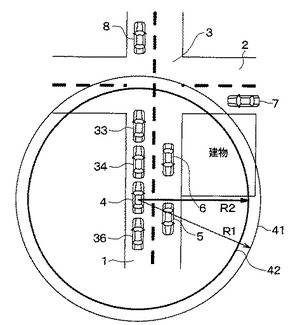
このように、自車両の周囲における他車両の混雑度が高いほど情報提供範囲を狭くすることの効果について説明する。自車両の周囲において車両数が多いということは、図5に示すように、道路1を交差点3に進入する自車両4の前後左右に他車両33、34、36、5、6が密集している可能性が高い。そのような場合には、自車両4が周囲の他車両33、34、36、5、6によって防護されている状態なので、道路2を走行する他車両7と自車両4とが出会い頭衝突を起こす可能性は低い。したがって、出会い頭衝突の警告を行うタイミングは比較的遅くてもよい。
【0051】
このとき、本実施形態のように、自車両4の情報提供範囲を通常時の範囲41よりも狭い範囲42とすれば、道路2から交差点3に進入する他車両7の存在に起因して警告を行うタイミングが、通常よりも遅くなる。したがって、出会い頭衝突の警告を不必要に早く行ってしまう可能性が低下する。また、自車両4の情報提供範囲を通常時の範囲41よりも狭い範囲42とすれば、ステップ150で走行方向の判定を行う頻度も低下するので、走行方向の判定を不必要に多く実行してしまう可能性が低減される。
【0052】
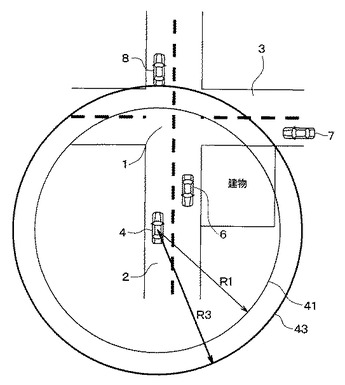
また逆に、自車両の周囲において車両数が少ないということは、図6に示すように、道路1を交差点3に進入する自車両4の前後左右の近傍に車両が存在しない可能性が高い。そのような場合には、自車両4が周囲の他車両によって防護されておらず、いわば裸の状態にある。したがって、道路2を走行する他車両7と自車両4とが出会い頭衝突を起こす可能性は、通常よりも高い。
【0053】
このとき、本実施形態のように、自車両4の情報提供範囲を通常時の範囲41よりも広い範囲43とすれば、道路2から交差点3に進入する他車両7の存在に起因して警告を行うタイミングを、通常よりも早くすることができ、その結果、出会い頭衝突の可能性が高い場合に、車両4のドライバは、その危険性をいち早く察知して対処することが可能となる。
【0054】
このように、出会い頭衝突防止支援装置10は、自車両7の周囲の車両の混雑度の指標を取得し、取得した混雑度の指標に基づいて、自車両7の周囲の車両の混雑度が高いほど、情報提供範囲を狭くする(すなわち、混雑度が低いほど、情報提供範囲を広くする)ので、車両の混雑度に応じて情報提供範囲を適切に制御することができる。
【0055】
また、出会い頭衝突防止支援装置10は、情報提供範囲内に少なくとも1つの他車両(具体的には他車両7)がいると判定したことに基づいて、受信パケット中の当該少なくとも1つの他車両(具体的には他車両7)の走行方向の情報に基づいて、自車両の走行方向と当該他車両7の走行方向が交差している他車両があるか否かを判定し、ある場合に、出会い頭衝突に対する警告の報知を行うようになっている。
【0056】
このようになっているので、混雑度が高いときに情報提供範囲が狭くなった場合、自車両4の走行方向と他車両7の走行方向が交差しているか否かを不必要に判定する可能性が低下し、その分、出会い頭衝突防止支援装置10の処理付加が低減する。
【0057】
(第2実施形態)
次に、本発明の第2実施形態について、第1実施形態と異なる部分を中心に説明する。本実施形態が第1実施形態と異なるのは、第1実施形態においては、自車両の周囲の混雑度の指標として、通信可能範囲内の車両数を用いたのに対し、本実施形態では、他車両から受信する車両情報パケット(すなわち受信パケット)の受信電力を用いる点である。この受信電力は、無線機11による車両情報パケットの受信時の電波環境の一例に相当する。
【0058】
このために、無線機11は、電波の受信信号強度を出力するRSSI回路(図示せず)を有し、図7に示すように、制御装置13はこのRSSI回路の出力を取得するようになっている。
【0059】
より詳しくは、パケット受信保存バッファ13aは、受信パケットに関連付けられて、その受信パケットを受信したときのRSSI回路の出力を記録するようになっている。そしてマイクロコンピュータ13cは、車両数計算機能22に代えて、受信電力計算機能25を実現するようになっている。
【0060】
受信電力計算機能25は、受信パケットを受信したときの無線機11の平均受信電力を計算する機能である。この受信電力計算機能25を実現するために、マイクロコンピュータ13cは、パケット受信保存バッファ13aから、現在から遡る所定期間(第2の所定期間に相当する)内において受信した受信パケットに関連付けられたRSSI出力を読み出す。これら読み出したRSSI出力の値は、それぞれ対応する受信パケットの受信時における受信信号強度である。この所定期間は、出会い頭衝突防止支援装置10における車両情報パケットの送信周期よりも長い期間とする。そしてパケット受信保存バッファ13aは、読み出した受信信号強度のそれぞれから受信電力(dBm)を算出し、これら受信電力の平均値を算出する。
【0061】
すなわち、現在から遡る所定期間内においてN個の車両送信パケットを受信している場合は、各車両送信パケットの受信時の受信電力をPi(i=1、2、…、N)とすると、平均受信電力は、ΣPi/Nとなる。ただし、Σは、iについて1〜Nまでの総和を意味する。
【0062】
このように算出された平均受信電力は、自車両の通信可能範囲内にいる他車両が、自車両に近い位置に偏っているほど大きくなる値である。したがって、このように算出された平均受信電力は、自車両の周囲における車両の混雑度の指標となる。
【0063】
また、本実施形態の情報提供範囲決定機能23は、受信電力計算機能25によって算出した平均受信電力に基づいて、情報提供範囲を決定する。
【0064】
この情報提供範囲決定機能23を実現するために、マイクロコンピュータ13cは、ROMに記録されている電力−範囲テーブルを参照して、情報提供範囲を決定する。電力−範囲テーブルは、平均受信電力と情報提供範囲の大きさとの対応関係を規定するテーブルである。具体的には、電力−範囲テーブルにおいては、電力は、通常範囲、通常範囲よりも小さい小電力範囲、通常範囲よりも大きい大電力範囲の3つに分類されており、これら3つの電力の範囲のそれぞれに、1つの情報提供範囲の大きさが対応付けられている。より具体的には、情報提供範囲は、自車両を中心とする円の内部とし、その円の半径で、情報提供範囲の大きさを規定するようになっている。そして、小電力範囲に割り当てられる円の半径(例えば120メートル)は、通常範囲に割り当てられる円の半径(例えば100メートル)よりも大きく、大電力範囲に割り当てられる円の半径(例えば80メートル)は、通常範囲に割り当てられる円の半径よりも小さい。
【0065】
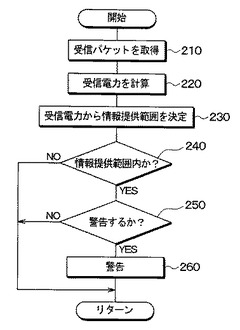
以下、受信電力計算機能25、情報提供範囲決定機能23に対応する機能の作動手順について、図8のフローチャートを用いて説明する。なお、自車情報送信機能21の機能は、図8のフローチャートの処理と並列的に実行されるようになっている。図8のステップ210、220の処理によって受信電力計算機能25が実現し、ステップ230の処理によって情報提供範囲決定機能23が実現し、ステップ240〜260の処理によって情報提供判断機能24が実現する。なお、ステップ240〜260の処理内容は、図4のステップ140〜160の処理内容と同じであるので、その説明は省略する。
【0066】
マイクロコンピュータ13cは、自車両が基点ノードまで基準距離以内に入ったときに、図8に示す処理の繰り返し実行を開始するようになっている。マイクロコンピュータ13cは、この図8の処理の実行の各回において、まずステップ210で、現在から遡る所定期間内に受信した受信パケットおよびそれらに関連付けられた受信信号強度を、パケット受信保存バッファ13aから読み出して取得する。続いてステップ220では、既に説明した通り、ステップ210で読み出した受信信号強度から受信電力を算出し、更にそれらの平均値を算出する。
【0067】
続いてステップ230では、上述の電力−範囲テーブルを参照し、ステップ220で算出した平均受信電力に対応する情報提供範囲の大きさを決定し、続いてステップ240を実行する。
【0068】
このように、本実施形態の出会い頭衝突防止支援装置10は、自車両の周囲における他車両の混雑度の指標として、車両情報パケットの受信時における平均受信電力を用い、この平均受信電力に応じて情報提供範囲を変化させる。従って、第1実施形態と同様の効果を得ることができる。しかも、無線機11は多くの場合RSSI回路を有しているので、そのようなRSSI回路の出力を利用することで、簡易に混雑度の指標を算出することができる。
【0069】
(第3実施形態)
次に、本発明の第3実施形態について、第1実施形態と異なる部分を中心に説明する。本実施形態が第1実施形態と異なるのは、第1実施形態においては、自車両の周囲の混雑度の指標として、通信可能範囲内の車両数を用いたのに対し、本実施形態では、他車両から受信する車両情報パケット(すなわち受信パケット)のパケット誤り率(PER:Packet Error Ratio)を用いる点である。このパケット誤り率は、無線機11による車両情報パケットの受信時の電波環境の一例に相当する。
【0070】
このために、無線機11は、図9に示すように、パケット誤り率を出力するようになっている。パケット誤り率とは、現在から遡る所定期間(第3の所定期間に相当する)内に受信したすべての車両情報パケットのうち、伝送誤りのある車両情報パケットの割合をいう。パケット誤り率を出力する無線機11は周知である。例えば、無線機11は、受信した車両情報パケットに対して巡回冗長検査(CRC:Cyclic Redundancy Check)等の誤り検出を行うことで、各車両情報パケットに伝送誤りがあるか否かを判定する。
【0071】
また、マイクロコンピュータ13cは、車両数計算機能22に代えて、PER取得機能26を実現するようになっている。PER取得機能26は、上述のように無線機11から出力されたパケット誤り率を取得する機能である。
【0072】
このようなPER取得機能26を実現することでマイクロコンピュータ13cが取得したパケット誤り率は、自車両の周囲において車両が混雑している程増大する。これは、自車両の周囲において他車両が混雑している程、無線送信の障害物が増えるからである。したがって、パケット誤り率は、自車両の周囲における車両の混雑度の指標となる。
【0073】
また、本実施形態の情報提供範囲決定機能23は、PER取得機能26によって取得したパケット誤り率に基づいて、情報提供範囲を決定する。
【0074】
この情報提供範囲決定機能23を実現するために、マイクロコンピュータ13cは、ROMに記録されているPER−範囲テーブルを参照して、情報提供範囲を決定する。PER−範囲テーブルは、パケット誤り率と情報提供範囲の大きさとの対応関係を規定するテーブルである。具体的には、PER−範囲テーブルにおいては、パケット誤り率は、通常範囲、通常範囲よりも小さい低誤り範囲、通常範囲よりも大きい高誤り範囲の3つに分類されており、これら3つのパケット誤り率の範囲のそれぞれに、1つの情報提供範囲の大きさが対応付けられている。より具体的には、情報提供範囲は、自車両を中心とする円の内部とし、その円の半径で、情報提供範囲の大きさを規定するようになっている。そして、低誤り範囲に割り当てられる円の半径(例えば120メートル)は、通常範囲に割り当てられる円の半径(例えば100メートル)よりも大きく、高誤り範囲に割り当てられる円の半径(例えば80メートル)は、通常範囲に割り当てられる円の半径よりも小さい。
【0075】
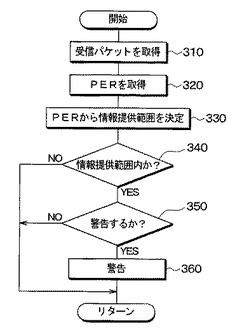
以下、PER取得機能26、情報提供範囲決定機能23に対応する機能の作動手順について、図10のフローチャートを用いて説明する。なお、自車情報送信機能21の機能は、図10のフローチャートの処理と並列的に実行されるようになっている。図10のステップ310、320の処理によってPER取得機能26が実現し、ステップ330の処理によって情報提供範囲決定機能23が実現し、ステップ340〜360の処理によって情報提供判断機能24が実現する。なお、ステップ340〜360の処理内容は、図4のステップ140〜160の処理内容と同じであるので、その説明は省略する。
【0076】
マイクロコンピュータ13cは、自車両が基点ノードまで基準距離以内に入ったときに、図10に示す処理の繰り返し実行を開始するようになっている。マイクロコンピュータ13cは、この図10の処理の実行の各回において、まずステップ310で、現在から遡る所定期間内に受信した受信パケットを取得する。続いてステップ320では、既に説明した通り、無線機11から出力されたパケット誤り率を取得する。
【0077】
続いてステップ330では、上述のPER−範囲テーブルを参照し、ステップ320で算出したパケット誤り率に対応する情報提供範囲の大きさを決定し、続いてステップ340を実行する。
【0078】
このように、本実施形態の出会い頭衝突防止支援装置10は、自車両の周囲における他車両の混雑度の指標として、受信パケットのパケット誤り率を用い、このパケット誤り率を取得に応じて情報提供範囲を変化させる。従って、第1実施形態と同様の効果を得ることができる。しかも、無線機11は多くの場合パケット誤り率を出力するようになっているので、そのような出力を利用することで、簡易に混雑度の指標を算出することができる。
【0079】
(他の実施形態)
以上、本発明の実施形態について説明したが、本発明の範囲は、上記実施形態のみに限定されるものではなく、本発明の各発明特定事項の機能を実現し得る種々の形態を包含するものである。
【0080】
例えば、上記実施形態では、マイクロコンピュータ13cは、無線機11がが他の複数の車両から受信した電波に基づいて、自車両の周囲の車両の混雑度の指標を取得するようになっている。具体的には、第1実施形態では、第1の所定期間内に他の複数の車両から受信した車両IDの実数を混雑度の指標とし、第2実施形態では、第2の所定期間内に前記他の複数の車両から受信した電波中のパケットの平均受信電力を、混雑度の指標とし、第3実施形態では、第3の所定期間内に他の複数の車両から受信した電波中のパケットのパケット誤り率を、混雑度の指標とするようになっている。しかし、マイクロコンピュータ13cは、他の複数の車両から受信した電波に基づいて、これら第1〜第3実施形態で示した情報以外の情報を取得し、それを混雑度の指標とするようになっていてもよい。
【0081】
また、第1実施形態においては、所定期間内に受信した車両情報パケットの送信元の車両の実数という指標に基づいて情報提供範囲を変化させ、第2実施形態においては、所定期間内の車両情報パケットの平均受信電力という指標に基づいて情報提供範囲を変化させ、第3実施形態においては、受信した車両情報パケットのパケット誤り率という指標に基づいて情報提供範囲を変化させている。しかし、これら3つの指標のうち2つ以上に基づいて情報提供範囲を変化させるようになっていてもよい。例えば、平均受信電力が通常範囲よりも大きく、かつ、パケット誤り率が通常よりも大きい場合にのみ、情報提供範囲を通常よりも小さくするようになっていてもよい。
【0082】
また、上記実施形態においては、情報提供範囲は、自車両の周囲の混雑度の指標(より具体的には、自車両の周囲が混雑するほど増大する量)に応じて変化するようになっているが、当該指標に加えて他の要因に応じて変化するようになっていてもよい。例えば、マイクロコンピュータ13cは、自車両の走行速度に応じて情報提供範囲の大きさを変化させるようになっていてもよい。
【0083】
また、上記実施形態においては、情報提供範囲は、自車両を中心とする所定の半径の円内であったが、必ずしもこのようになっておらずともよい。例えば情報提供範囲は、自車両を中心とする所定の矩形の範囲内であってもよいし、自車両を焦点の1つとする楕円の範囲内であってもよい。すなわち、情報提供範囲は、自車両を含む範囲内であれば足りる。
【0084】
また、無線機11と制御装置13とは、車内LAN(例えばEthernet(登録商標)規格に準じたLAN)を介して接続されていてもよい。その場合、送信パケット、受信パケット、受信電波強度を示す信号、パケットエラーレートを示す信号は、この車内LANを介して無線機11と制御装置13との間で授受される。
【0085】
また、上記の実施形態において、マイクロコンピュータ13cがプログラムを実行することで実現している各機能は、それらの機能を有するハードウェア(例えば回路構成をプログラムすることが可能なFPGA)を用いて実現するようになっていてもよい。
【符号の説明】
【0086】
1、2、51、52 道路
3、53 交差点
4〜8、33〜36、61〜70 車両
10 出会い頭衝突防止支援装置
11 無線機
12 ナビゲーション装置
13 制御装置
13a パケット受信保存バッファ
13b パケット送信保存バッファ
13c マイクロコンピュータ
21 自車情報送信機能
22 車両数計算機能
23 情報提供範囲決定機能
24 情報提供判断機能
25 受信電力計算機能
26 PER取得機能
40〜43 情報提供範囲
【技術分野】
【0001】
本発明は、出会い頭衝突防止支援装置に関するものである。
【背景技術】
【0002】
従来、車両間の出会い頭衝突防止を支援するため、車車間通信によって相手車両の位置の情報を取得し、取得した位置の情報に基づいて、出会い頭衝突の危険がある場合に警告を行う装置が知られている(例えば、特許文献1、2参照)。このような出会い頭衝突防止支援装置には、他車両から当該車両の位置の情報を受信し、その位置情報と自車両の情報とを比較し、他車両が自車両の情報提供範囲内にあることに基づいて、出会い頭衝突の警告を行うものがある。従来、この情報提供範囲は固定範囲であった。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−9486号公報
【特許文献2】特開2005−227978号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、発明者の検討によれば、この情報提供範囲が固定であると、以下に示すような問題が発生する。すなわち、図11に示すように、道路51を走行する車両61の周囲に車両62〜64、66、70が密集していると、車両62〜64、66、70によって防護された状態にある車両61は、交差する道路52を走行する車両65と衝突する可能性が低い。したがって、車両65の存在に起因して出会い頭衝突の警告を行うタイミングは遅くてもよいが、情報提供範囲が固定であると、不必要な警告を行ってしまう可能性がある。
【0005】
一方、図12に示すように、車両61の周囲の車両が疎らな場合は、車両61が他の車両によって防護された状態にないので、車両65と衝突する可能性が比較的高くなる。したがって、車両65の存在に起因して出会い頭衝突の警告を行うタイミングを早くしたいが、情報提供範囲が固定であると、警告が遅れてしまう可能性がある。
【0006】
本発明は上記点に鑑み、自車両の周囲の情報提供範囲内に他車両が入ったことに基づいて出会い頭衝突の警告を行う装置において、車両の混雑度に応じて情報提供範囲を適切に制御することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するための請求項1に記載の発明は、第1の車両(4)に搭載される出会い頭衝突防止支援装置において、他の複数の車両のそれぞれから送信された電波を受信し、受信した電波中から他の複数の車両のそれぞれの位置の情報を含むパケットを取得する受信手段(11)と、他の複数の車両の位置の情報を、受信手段(11)が取得したパケットから読み出し、読み出した位置の情報に基づいて、第1の車両(4)を含む所定の情報提供範囲内に他の複数の車両のうち少なくとも1つがいるかを判定する判定手段(140、240、340)と、情報提供範囲内に他の複数の車両の少なくとも1つがいると判定手段(140、240、340)が判定したことに基づいて、出会い頭衝突に対する警告の報知を行う情報提供手段(150、160、250、260、350、360)と、受信手段(11)が他の複数の車両から受信した電波に基づいて、第1の車両(4)の周囲の車両の混雑度の指標を取得する混雑度指標取得手段(120、220、230)と、混雑度指標取得手段(120、220、230)が取得した混雑度の指標に基づいて、第1の車両(4)の周囲の車両の混雑度が高いほど、情報提供範囲を狭くする範囲決定手段(130、230、330)と、を備えたことを特徴とする。
【0008】
このように、出会い頭衝突防止支援装置は、第1の車両(4)の周囲の車両の混雑度の指標を取得し、取得した混雑度の指標に基づいて、第1の車両(4)の周囲の車両の混雑度が低いほど、情報提供範囲を狭くするので、車両の混雑度に応じて情報提供範囲を適切に制御することができる。
【0009】
また、請求項2に記載のように、他の複数の車両のそれぞれから送信されて受信手段(11)が受信する電波中のパケットは、他の複数の車両の位置の情報と共に他の複数の車両の走行方向の情報を含み、情報提供手段(150、160、250、260、350、360)は、情報提供範囲内に他の複数の車両の少なくとも1つがいると判定手段(140、240、340)が判定したことに基づいて、受信手段(11)が取得したパケット中の少なくとも1つの車両の走行方向の情報に基づいて、第1の車両(4)の走行方向と当該少なくとも1つの車両の走行方向が交差しているか否かを判定し、交差している車両がある場合に、出会い頭衝突に対する警告の報知を行うようになっていてもよい。
【0010】
このようになっている場合、混雑度が高いときに、情報提供範囲が狭くなるので、第1の車両(4)の走行方向と他の車両の走行方向が交差しているか否かを不必要に判定する可能性が低下し、その分、出会い頭衝突防止支援装置10の処理付加が低減する。
【0011】
また、請求項3に記載のように、他の複数の車両のそれぞれから送信されて受信手段(11)が受信する電波中の前記パケットは、それぞれ他の複数の車両の位置の情報と共に他の複数の車両の車両IDを含み、混雑度指標取得手段(120、220、230)は、第1の所定期間内に他の複数の車両から受信した車両IDの実数を、混雑度の指標として取得するようになっていてもよい。
【0012】
また、請求項4に記載のように、混雑度指標取得手段(120、220、230)は、第2の所定期間内に他の複数の車両から受信したパケットの平均受信電力を、混雑度の指標として取得するようになっていてもよい。
【0013】
また、請求項5に記載のように、混雑度指標取得手段(120、220、230)は、第3の所定期間内に他の複数の車両から受信したパケットのパケット誤り率を、混雑度の指標として取得するようになっていてもよい。
【0014】
なお、上記および特許請求の範囲における括弧内の符号は、特許請求の範囲に記載された用語と後述の実施形態に記載される当該用語を例示する具体物等との対応関係を示すものである。
【図面の簡単な説明】
【0015】
【図1】本発明の第1実施形態に係る出会い頭衝突防止支援の概要を示す模式図である。
【図2】車両に搭載される出会い頭衝突防止支援装置10の構成を示す図である。
【図3】制御装置13の構成を示す図である。
【図4】マイクロコンピュータ13cの処理の手順を示すフローチャートである。
【図5】自車両4の周囲が通常より混雑している場合の情報提供範囲42を示す図である。
【図6】自車両4の周囲が通常より疎らである場合の情報提供範囲43を示す図である。
【図7】第2実施形態における制御装置13の構成を示す図である。
【図8】第2実施形態におけるマイクロコンピュータ13cの処理の手順を示すフローチャートである。
【図9】第3実施形態における制御装置13の構成を示す図である。
【図10】第3実施形態におけるマイクロコンピュータ13cの処理の手順を示すフローチャートである。
【図11】車両61の周囲が混雑している場合を示す図である。
【図12】車両61の周囲が疎らな場合を示す図である。
【発明を実施するための形態】
【0016】
(第1実施形態)
以下、本発明の第1実施形態について説明する。図1に例示するように、本実施形態は、道路1、2が交差する交差点3において、車両4〜8による出会い頭衝突の防止を支援することを目的とする。
【0017】
例えば、道路1から交差点3に進入しようとしている車両4は、道路2から交差点3に進入しようとしている車両7と出会い頭衝突を起こす恐れがあるので、ドライバに警告を行うことが好ましい。このような場合に、車両4および車両7に備えられた出会い頭衝突防止支援装置が、それぞれ当該車両4、7のドライバに対して警告を行うことで、車両4、7による出会い頭衝突の防止を支援する。
【0018】
このような出会い頭衝突の防止を支援するために、複数の車両(例えば図1では車両4〜8)のそれぞれに、図2に示すような出会い頭衝突防止支援装置10が搭載されている。これら出会い頭衝突防止支援装置10は、車車間無線通信によって、自車両の位置の情報および自車両の走行方向の情報を1つのパケットにまとめ、そのパケットを電波に含めて送信すると共に、他の複数の車両のそれぞれから送信された電波を受信し、受信した電波からパケットを取得し、取得したパケットに含まれる当該車両の位置の情報および当該車両の走行方向の情報を取得し、取得した情報に基づいて、ドライバに対して出会い頭衝突の警告を行うべきか否かを決定する。
【0019】
例えば、車両4(第1の車両の一例に相当する)の出会い頭衝突防止支援装置10は、自車両4を中心とする所定の情報提供範囲40内にある車両5〜7のそれぞれについて、自車両4と交差する方向に走行しているか否かを判定し、交差する方向に走行している車両が少なくとも1つあれば、自車両4のドライバに対して出会い頭衝突の警告を行う。本実施形態の特徴は、情報提供範囲40の大きさが変化することである。
【0020】
以下、この出会い頭衝突防止支援装置10の構成について説明する。図2に示すように、出会い頭衝突防止支援装置10は、無線機11、ナビゲーション装置12、制御装置13を有している。
【0021】
無線機11(受信手段の一例に相当する)は、車車間無線通信を実現するための装置であり、アンテナが受信した無線電波(データパケットを含む)に対して増幅、周波数変換、復調、A/D変換等、所定の無線通信プロトコル(例えばDSRC、携帯電話用データ通信)に従った処理を施し、その結果取得したデータパケット(以下、受信パケットという)を制御装置13に出力する。また無線機11は、制御装置13から受けた送信用のデータパケット(以下、送信パケットという)に対してD/A変換、変調、周波数変換、増幅等、所定の無線通信プロトコルに従った処理を施し、その結果の信号を上記のアンテナに出力する。これによって、送信パケットを含む無線電波が送信される。このような作動を行う無線機11を利用することで、制御装置13は、他車両の出会い頭衝突防止支援装置10の無線通信(すなわち車車間通信)を実現することができる。
【0022】
ナビゲーション装置12は、現在位置から目的地までの最適な経路を算出し、算出した経路に沿って車両が移動するよう案内する装置である。この案内は、車両内に搭載されたスピーカおよび画像表示装置を用いて、音声および画像で行うようになっている。またナビゲーション装置12は、GPS受信機、車速センサ、加速度センサ、ヨーレートセンサ等のセンサ群を備え、これらセンサ群からの信号に基づいて、自車両の現在位置、走行方向、走行速度等を特定するようになっている。
【0023】
またナビゲーション装置12は、制御装置13からの指令に応じて、上記スピーカに出力する音声の内容および画像表示装置に表示する画像の内容を制御するようになっている。またナビゲーション装置12は、制御装置13からの要求に応じて、現在の自車両の位置、走行方向、走行速度等の情報を制御装置13に出力するようになっている。
【0024】
制御装置13は、パケット受信保存バッファ13a、パケット送信保存バッファ13b、およびマイクロコンピュータ13cを有している。パケット受信保存バッファ13aは、無線機11から制御装置13に出力された受信パケットを取得して蓄積する記憶装置である。なお、受信パケットの蓄積の際、その受信パケットを蓄積した時刻の情報を当該受信パケットに関連付けて記録する。受信パケットを蓄積した時刻は、実質的に無線機11が電波を受信して受信パケットを取得した時刻と同じである。したがって、このようにすることで、蓄積されている受信パケットをいつ受信したかがわかるようになる。
【0025】
パケット送信保存バッファ13bは、マイクロコンピュータ13cから出力された送信パケットを一時的に格納し、所定のタイミング(例えば100ミリ秒に1回)でその送信パケットを無線機11に出力する記憶装置である。
【0026】
マイクロコンピュータ13cは、図示しないCPU、RAM、ROMを備え、CPUがROMに保存されているプログラムを実行することで、各種処理を実現する。具体的には、マイクロコンピュータ13cが実現する機能としては、自車情報送信機能21、車両数計算機能22、情報提供範囲決定機能23、情報提供判断機能24等がある。
【0027】
自車情報送信機能21は、自車両の情報を定期的に(例えば100ミリ秒毎に)無線送信する機能である。この自車情報送信機能21を実現するために、マイクロコンピュータ13cは、定期的に、ナビゲーション装置12に対して自車両の現在の位置および走行方向の情報を要求して取得し、また、ROMにあらかじめ記録されている自車両の車両IDの情報を読み出す。そして、これら自車両の車両ID、位置、および走行方向の情報を、1つの送信パケットに含め、パケット送信保存バッファ13bに出力する。これによって、パケット送信保存バッファ13bは、送信パケットを所定のタイミングで定期的に無線機11に出力するようになる。その結果、無線機11は、車両ID、自車位置、および自車両の走行方向の情報を含む送信パケットを、所定のタイミングで定期的に周囲の車両に、電波に含めて無線送信する。このような、車両の走行情報(具体的には、車両ID、自車位置、および自車両の走行方向)の情報を含む送信パケットを、車両情報パケットという。
【0028】
車両数計算機能22は、他車両から送信され、自車両の無線機11が受信して制御装置13のパケット受信保存バッファ13aに蓄積された車両情報パケット(すなわち受信パケット)中の車両IDに基づいて、自車両の周囲の車両の数を算出する機能である。
【0029】
この車両数計算機能22を実現するために、マイクロコンピュータ13cは、パケット受信保存バッファ13aから、現在から遡る所定期間(第1の所定期間に相当する)内において受信した受信パケットを読み出す。この所定期間は、出会い頭衝突防止支援装置10における車両情報パケットの送信周期よりも長い期間とする。
【0030】
そしてマイクロコンピュータ13cは、読み出した受信パケット中の車両IDの数をカウントする。この際、同じ値の車両IDが複数個あったとしても、それらは1個であるとカウントする。
【0031】
このようにカウントされた車両IDの数は、現在から遡る所定期間内において、自車両の通信可能範囲(例えば、自車両を中心とする半径300メートル〜400メートル程度の円の内部)から車両情報パケットを送信した車両の数(延べではなく実数)である。したがって、このようにカウントされた車両数は、自車両の通信可能範囲内の他車両の数であるので、自車両の周囲における車両の混雑度の指標となる。
【0032】
情報提供範囲決定機能23は、車両数計算機能22によって算出した車両数に基づいて、情報提供範囲を決定する機能である。情報提供範囲とは、その範囲外の車両を、出会い頭衝突の原因とみなす車両から除外するための範囲である。すなわち、マイクロコンピュータ13cは、情報提供範囲内の車両を、自車両と出会い頭衝突する可能性がある車両とみなす一方、情報提供範囲外の車両を、自車両と出会い頭衝突する可能性がある車両とみなさない。情報提供範囲は、自車両の通信可能範囲よりも狭い。
【0033】
この情報提供範囲決定機能23を実現するために、マイクロコンピュータ13cは、ROMに記録されている数−範囲テーブルを参照して、情報提供範囲を決定する。数−範囲テーブルは、車両数と情報提供範囲の大きさとの対応関係を規定するテーブルである。具体的には、数−範囲テーブルにおいては、車両数は、通常範囲、通常範囲よりも少ない疎範囲、通常範囲よりも多い混雑範囲の3つに分類されており、これら3つの車両数の範囲のそれぞれに、1つの情報提供範囲の大きさが対応付けられている。より具体的には、情報提供範囲は、自車両を中心とする円の内部とし、その円の半径で、情報提供範囲の大きさを規定するようになっている。そして、疎範囲に割り当てられる円の半径(例えば120メートル)は、通常範囲に割り当てられる円の半径(例えば100メートル)よりも大きく、混雑範囲に割り当てられる円の半径(例えば80メートル)は、通常範囲に割り当てられる円の半径よりも小さい。
【0034】
情報提供判断機能24は、情報提供範囲決定機能23によって決められた情報提供範囲と、受信パケット中の位置および走行方向の情報に基づいて、出会い頭衝突に対する警告(すなわち、情報提供)を行うか否かを決定し、警告を行うと決定した場合は、警告を実行する機能である。この機能の具体的な内容については後述する。
【0035】
以下、車両数計算機能22、情報提供範囲決定機能23、および情報提供判断機能24に対応する機能の作動手順について、図4のフローチャートを用いて説明する。なお、自車情報送信機能21の機能は、図4のフローチャートの処理と並列的に実行されるようになっている。図4のステップ110、120の処理によって車両数計算機能22が実現し、ステップ130の処理によって情報提供範囲決定機能23が実現し、ステップ140〜160の処理によって情報提供判断機能24が実現する。
【0036】
マイクロコンピュータ13cは、自車両が基点ノードまで基準距離(例えば200メートル)以内に入ったときに、図4に示す処理の繰り返し実行を開始するようになっている。基点ノードとは、出会い頭衝突の発生の恐れが高いとみなされた交差点の位置である。基点ノードの位置は、あらかじめマイクロコンピュータ13cのROMに記録されている。そして、自車両の現在の位置は、ナビゲーション装置12に要求して取得する。
【0037】
マイクロコンピュータ13cは、この図4の処理の実行の各回において、まずステップ110で、現在から遡る所定期間内に受信した受信パケットを、パケット受信保存バッファ13aから読み出して取得する。続いてステップ120では、既に説明した通り、ステップ110で読み出した受信パケット中の車両IDの数(延べ数ではなく実数(すなわち異なり数))をカウントする。この車両IDの数は、既に説明した通り、自車両の通信可能範囲内における他車両の実数である。
【0038】
続いてステップ130では、上述の数−範囲テーブルを参照し、ステップ120でカウントした車両の実数に対応する情報提供範囲の大きさを決定する。
【0039】
続いてステップ140では、読み出した受信パケットのうち、今回のステップ140で新たに読み出した新しい受信パケットのそれぞれから、位置の情報を読み出し、それぞれの位置が、自車両を中心とする情報提供範囲内に入っているか否かを判定する。なお、自車両の位置は、ナビゲーション装置12に要求して取得する。そして、それらのうち1つでも情報提供範囲内に入っていると判定した場合は、続いてステップ150を実行し、それらのうち1つも情報提供範囲内にはいっていないと判定した場合は、ステップ150、160をバイパスして図4の1回分の処理を終了する。
【0040】
このようにステップ150、160をバイパスするのは、当該受信パケットの送信元の他車両と自車両との間の距離が十分離れているので、出会い頭衝突を警告するには尚早であるという観点に基づくものである。
【0041】
なお、「今回のステップ140で新たに読み出した新しい受信パケット」とは、図4に示す処理の繰り返し実行の開始後、2回目以降のステップ140の実行機会においては、前回のステップ140でも読み出した受信パケット以外のパケットとなり、図4に示す処理の繰り返し実行の開始後、初めてのステップ140の実行機会においては、読み出したすべての受信パケットとなる。
【0042】
ステップ150では、出会い頭衝突の警告(すなわち情報提供)をするか否かを判定する。具体的には、ステップ140で情報提供範囲内にあると判定した位置にある他車両のそれぞれについて、自車両の走行方向と当該他車両の走行方向とが交差している場合は警告するか否か判定し、1つでも交差している場合は警告すると判定し、1つも交差していない場合は警告しないと判定する。
【0043】
なお、自車両の走行方向は、ナビゲーション装置12に要求することで取得する。また、当該他車両の走行方向は、当該当該他車両から受信した受信パケット中の走行方向に基づいて決定する。
【0044】
また、自車両の走行方向と当該他車両の走行方向とが交差しているか否かについては、例えば、自車両の走行方向と他車両の走行方向が成す角θ(ただし0°≦θ≦180°)が、第1所定角度(例えば45°)以上第2所定角度(例えば135°)以下である場合に、自車両の走行方向と当該他車両の走行方向とが交差していると判定し、それ以外の場合に、自車両の走行方向と当該他車両の走行方向とが交差していないと判定してもよい。
【0045】
警告すると判定した場合は続いてステップ160で、ナビゲーション装置12に対して音声および画像で警告を行うよう指令する。ナビゲーション装置12は、この指令に応じて、出会い頭衝突の恐れがある旨を警告する音声(例えば、「出会い頭衝突に注意してください」という音声)をスピーカに出力させ、また、出会い頭衝突の恐れがある旨を警告する画像を画像表示装置に表示させる。この警告は、所定の時間(例えば10秒)継続してもよいし、自車両が交差点(より詳しくは基点ノード)の位置を通り過ぎるまで継続するようになっていてもよい。
【0046】
ステップ160の後、図4の1回分の処理を終了する。また、警告しないと判定した場合は、ステップ160の警告処理をバイパスして、図4の1回分の処理を終了する。
【0047】
以上説明した通り、本実施形態の出会い頭衝突防止支援装置10は、新たな受信パケットの送信元の他車両が1台でも情報提供範囲40内にあれば(ステップ140参照)、その情報提供範囲内の他車両の走行方向と自車両の走行方向とが交差しているか否かを判定し(ステップ150参照)、1台でも交差していれば出会い頭衝突の警告を行い、1台も交差していなければ出会い頭衝突の警告を行わないという作動を繰り返す。したがって、出会い頭衝突防止支援装置10は、自車両の走行方向と交差する方向に走行する他車両が情報提供範囲内に入ってこない間は、出会い頭衝突の警告を行わず、自車両の走行方向と交差する方向に走行する他車両が1台でも情報提供範囲内に入ってくれば、出会い頭衝突の警告を行う。
【0048】
例えば、図1に示すような場面において、車両4(第1の車両の一例に相当する)に搭載された出会い頭衝突防止支援装置10は、自車両4の情報提供範囲内に他車両7(第2の車両の一例に相当する)が進入したとき、当該他車両7から送信された車両情報パケットに基づいて、当該他車両7が情報提供範囲40内に入ったと判定し(ステップ140参照)、さらに、他車両7の走行方向が自車両の走行方向と交差すると判定し(ステップ150参照)、続いて警告を行う(ステップ160参照)。
【0049】
そして出会い頭衝突防止支援装置10は、現在から遡った所定期間内に受信した車両情報パケットの送信元の他車両の実数(すなわち、所定期間内に他の車両から受信した車両IDの実数)が、通常の範囲を超えている場合、すなわち、自車両の周囲で他車両が通常よりも混雑している場合、情報提供範囲を通常よりも小さくする。また、出会い頭衝突防止支援装置10は、現在から遡った所定期間内に受信した車両情報パケットの送信元の他車両の実数が、通常の範囲を下回っている場合、すなわち、自車両の周囲で他車両が通常よりも疎らである場合、情報提供範囲を通常よりも拡大する。
【0050】
このように、自車両の周囲における他車両の混雑度が高いほど情報提供範囲を狭くすることの効果について説明する。自車両の周囲において車両数が多いということは、図5に示すように、道路1を交差点3に進入する自車両4の前後左右に他車両33、34、36、5、6が密集している可能性が高い。そのような場合には、自車両4が周囲の他車両33、34、36、5、6によって防護されている状態なので、道路2を走行する他車両7と自車両4とが出会い頭衝突を起こす可能性は低い。したがって、出会い頭衝突の警告を行うタイミングは比較的遅くてもよい。
【0051】
このとき、本実施形態のように、自車両4の情報提供範囲を通常時の範囲41よりも狭い範囲42とすれば、道路2から交差点3に進入する他車両7の存在に起因して警告を行うタイミングが、通常よりも遅くなる。したがって、出会い頭衝突の警告を不必要に早く行ってしまう可能性が低下する。また、自車両4の情報提供範囲を通常時の範囲41よりも狭い範囲42とすれば、ステップ150で走行方向の判定を行う頻度も低下するので、走行方向の判定を不必要に多く実行してしまう可能性が低減される。
【0052】
また逆に、自車両の周囲において車両数が少ないということは、図6に示すように、道路1を交差点3に進入する自車両4の前後左右の近傍に車両が存在しない可能性が高い。そのような場合には、自車両4が周囲の他車両によって防護されておらず、いわば裸の状態にある。したがって、道路2を走行する他車両7と自車両4とが出会い頭衝突を起こす可能性は、通常よりも高い。
【0053】
このとき、本実施形態のように、自車両4の情報提供範囲を通常時の範囲41よりも広い範囲43とすれば、道路2から交差点3に進入する他車両7の存在に起因して警告を行うタイミングを、通常よりも早くすることができ、その結果、出会い頭衝突の可能性が高い場合に、車両4のドライバは、その危険性をいち早く察知して対処することが可能となる。
【0054】
このように、出会い頭衝突防止支援装置10は、自車両7の周囲の車両の混雑度の指標を取得し、取得した混雑度の指標に基づいて、自車両7の周囲の車両の混雑度が高いほど、情報提供範囲を狭くする(すなわち、混雑度が低いほど、情報提供範囲を広くする)ので、車両の混雑度に応じて情報提供範囲を適切に制御することができる。
【0055】
また、出会い頭衝突防止支援装置10は、情報提供範囲内に少なくとも1つの他車両(具体的には他車両7)がいると判定したことに基づいて、受信パケット中の当該少なくとも1つの他車両(具体的には他車両7)の走行方向の情報に基づいて、自車両の走行方向と当該他車両7の走行方向が交差している他車両があるか否かを判定し、ある場合に、出会い頭衝突に対する警告の報知を行うようになっている。
【0056】
このようになっているので、混雑度が高いときに情報提供範囲が狭くなった場合、自車両4の走行方向と他車両7の走行方向が交差しているか否かを不必要に判定する可能性が低下し、その分、出会い頭衝突防止支援装置10の処理付加が低減する。
【0057】
(第2実施形態)
次に、本発明の第2実施形態について、第1実施形態と異なる部分を中心に説明する。本実施形態が第1実施形態と異なるのは、第1実施形態においては、自車両の周囲の混雑度の指標として、通信可能範囲内の車両数を用いたのに対し、本実施形態では、他車両から受信する車両情報パケット(すなわち受信パケット)の受信電力を用いる点である。この受信電力は、無線機11による車両情報パケットの受信時の電波環境の一例に相当する。
【0058】
このために、無線機11は、電波の受信信号強度を出力するRSSI回路(図示せず)を有し、図7に示すように、制御装置13はこのRSSI回路の出力を取得するようになっている。
【0059】
より詳しくは、パケット受信保存バッファ13aは、受信パケットに関連付けられて、その受信パケットを受信したときのRSSI回路の出力を記録するようになっている。そしてマイクロコンピュータ13cは、車両数計算機能22に代えて、受信電力計算機能25を実現するようになっている。
【0060】
受信電力計算機能25は、受信パケットを受信したときの無線機11の平均受信電力を計算する機能である。この受信電力計算機能25を実現するために、マイクロコンピュータ13cは、パケット受信保存バッファ13aから、現在から遡る所定期間(第2の所定期間に相当する)内において受信した受信パケットに関連付けられたRSSI出力を読み出す。これら読み出したRSSI出力の値は、それぞれ対応する受信パケットの受信時における受信信号強度である。この所定期間は、出会い頭衝突防止支援装置10における車両情報パケットの送信周期よりも長い期間とする。そしてパケット受信保存バッファ13aは、読み出した受信信号強度のそれぞれから受信電力(dBm)を算出し、これら受信電力の平均値を算出する。
【0061】
すなわち、現在から遡る所定期間内においてN個の車両送信パケットを受信している場合は、各車両送信パケットの受信時の受信電力をPi(i=1、2、…、N)とすると、平均受信電力は、ΣPi/Nとなる。ただし、Σは、iについて1〜Nまでの総和を意味する。
【0062】
このように算出された平均受信電力は、自車両の通信可能範囲内にいる他車両が、自車両に近い位置に偏っているほど大きくなる値である。したがって、このように算出された平均受信電力は、自車両の周囲における車両の混雑度の指標となる。
【0063】
また、本実施形態の情報提供範囲決定機能23は、受信電力計算機能25によって算出した平均受信電力に基づいて、情報提供範囲を決定する。
【0064】
この情報提供範囲決定機能23を実現するために、マイクロコンピュータ13cは、ROMに記録されている電力−範囲テーブルを参照して、情報提供範囲を決定する。電力−範囲テーブルは、平均受信電力と情報提供範囲の大きさとの対応関係を規定するテーブルである。具体的には、電力−範囲テーブルにおいては、電力は、通常範囲、通常範囲よりも小さい小電力範囲、通常範囲よりも大きい大電力範囲の3つに分類されており、これら3つの電力の範囲のそれぞれに、1つの情報提供範囲の大きさが対応付けられている。より具体的には、情報提供範囲は、自車両を中心とする円の内部とし、その円の半径で、情報提供範囲の大きさを規定するようになっている。そして、小電力範囲に割り当てられる円の半径(例えば120メートル)は、通常範囲に割り当てられる円の半径(例えば100メートル)よりも大きく、大電力範囲に割り当てられる円の半径(例えば80メートル)は、通常範囲に割り当てられる円の半径よりも小さい。
【0065】
以下、受信電力計算機能25、情報提供範囲決定機能23に対応する機能の作動手順について、図8のフローチャートを用いて説明する。なお、自車情報送信機能21の機能は、図8のフローチャートの処理と並列的に実行されるようになっている。図8のステップ210、220の処理によって受信電力計算機能25が実現し、ステップ230の処理によって情報提供範囲決定機能23が実現し、ステップ240〜260の処理によって情報提供判断機能24が実現する。なお、ステップ240〜260の処理内容は、図4のステップ140〜160の処理内容と同じであるので、その説明は省略する。
【0066】
マイクロコンピュータ13cは、自車両が基点ノードまで基準距離以内に入ったときに、図8に示す処理の繰り返し実行を開始するようになっている。マイクロコンピュータ13cは、この図8の処理の実行の各回において、まずステップ210で、現在から遡る所定期間内に受信した受信パケットおよびそれらに関連付けられた受信信号強度を、パケット受信保存バッファ13aから読み出して取得する。続いてステップ220では、既に説明した通り、ステップ210で読み出した受信信号強度から受信電力を算出し、更にそれらの平均値を算出する。
【0067】
続いてステップ230では、上述の電力−範囲テーブルを参照し、ステップ220で算出した平均受信電力に対応する情報提供範囲の大きさを決定し、続いてステップ240を実行する。
【0068】
このように、本実施形態の出会い頭衝突防止支援装置10は、自車両の周囲における他車両の混雑度の指標として、車両情報パケットの受信時における平均受信電力を用い、この平均受信電力に応じて情報提供範囲を変化させる。従って、第1実施形態と同様の効果を得ることができる。しかも、無線機11は多くの場合RSSI回路を有しているので、そのようなRSSI回路の出力を利用することで、簡易に混雑度の指標を算出することができる。
【0069】
(第3実施形態)
次に、本発明の第3実施形態について、第1実施形態と異なる部分を中心に説明する。本実施形態が第1実施形態と異なるのは、第1実施形態においては、自車両の周囲の混雑度の指標として、通信可能範囲内の車両数を用いたのに対し、本実施形態では、他車両から受信する車両情報パケット(すなわち受信パケット)のパケット誤り率(PER:Packet Error Ratio)を用いる点である。このパケット誤り率は、無線機11による車両情報パケットの受信時の電波環境の一例に相当する。
【0070】
このために、無線機11は、図9に示すように、パケット誤り率を出力するようになっている。パケット誤り率とは、現在から遡る所定期間(第3の所定期間に相当する)内に受信したすべての車両情報パケットのうち、伝送誤りのある車両情報パケットの割合をいう。パケット誤り率を出力する無線機11は周知である。例えば、無線機11は、受信した車両情報パケットに対して巡回冗長検査(CRC:Cyclic Redundancy Check)等の誤り検出を行うことで、各車両情報パケットに伝送誤りがあるか否かを判定する。
【0071】
また、マイクロコンピュータ13cは、車両数計算機能22に代えて、PER取得機能26を実現するようになっている。PER取得機能26は、上述のように無線機11から出力されたパケット誤り率を取得する機能である。
【0072】
このようなPER取得機能26を実現することでマイクロコンピュータ13cが取得したパケット誤り率は、自車両の周囲において車両が混雑している程増大する。これは、自車両の周囲において他車両が混雑している程、無線送信の障害物が増えるからである。したがって、パケット誤り率は、自車両の周囲における車両の混雑度の指標となる。
【0073】
また、本実施形態の情報提供範囲決定機能23は、PER取得機能26によって取得したパケット誤り率に基づいて、情報提供範囲を決定する。
【0074】
この情報提供範囲決定機能23を実現するために、マイクロコンピュータ13cは、ROMに記録されているPER−範囲テーブルを参照して、情報提供範囲を決定する。PER−範囲テーブルは、パケット誤り率と情報提供範囲の大きさとの対応関係を規定するテーブルである。具体的には、PER−範囲テーブルにおいては、パケット誤り率は、通常範囲、通常範囲よりも小さい低誤り範囲、通常範囲よりも大きい高誤り範囲の3つに分類されており、これら3つのパケット誤り率の範囲のそれぞれに、1つの情報提供範囲の大きさが対応付けられている。より具体的には、情報提供範囲は、自車両を中心とする円の内部とし、その円の半径で、情報提供範囲の大きさを規定するようになっている。そして、低誤り範囲に割り当てられる円の半径(例えば120メートル)は、通常範囲に割り当てられる円の半径(例えば100メートル)よりも大きく、高誤り範囲に割り当てられる円の半径(例えば80メートル)は、通常範囲に割り当てられる円の半径よりも小さい。
【0075】
以下、PER取得機能26、情報提供範囲決定機能23に対応する機能の作動手順について、図10のフローチャートを用いて説明する。なお、自車情報送信機能21の機能は、図10のフローチャートの処理と並列的に実行されるようになっている。図10のステップ310、320の処理によってPER取得機能26が実現し、ステップ330の処理によって情報提供範囲決定機能23が実現し、ステップ340〜360の処理によって情報提供判断機能24が実現する。なお、ステップ340〜360の処理内容は、図4のステップ140〜160の処理内容と同じであるので、その説明は省略する。
【0076】
マイクロコンピュータ13cは、自車両が基点ノードまで基準距離以内に入ったときに、図10に示す処理の繰り返し実行を開始するようになっている。マイクロコンピュータ13cは、この図10の処理の実行の各回において、まずステップ310で、現在から遡る所定期間内に受信した受信パケットを取得する。続いてステップ320では、既に説明した通り、無線機11から出力されたパケット誤り率を取得する。
【0077】
続いてステップ330では、上述のPER−範囲テーブルを参照し、ステップ320で算出したパケット誤り率に対応する情報提供範囲の大きさを決定し、続いてステップ340を実行する。
【0078】
このように、本実施形態の出会い頭衝突防止支援装置10は、自車両の周囲における他車両の混雑度の指標として、受信パケットのパケット誤り率を用い、このパケット誤り率を取得に応じて情報提供範囲を変化させる。従って、第1実施形態と同様の効果を得ることができる。しかも、無線機11は多くの場合パケット誤り率を出力するようになっているので、そのような出力を利用することで、簡易に混雑度の指標を算出することができる。
【0079】
(他の実施形態)
以上、本発明の実施形態について説明したが、本発明の範囲は、上記実施形態のみに限定されるものではなく、本発明の各発明特定事項の機能を実現し得る種々の形態を包含するものである。
【0080】
例えば、上記実施形態では、マイクロコンピュータ13cは、無線機11がが他の複数の車両から受信した電波に基づいて、自車両の周囲の車両の混雑度の指標を取得するようになっている。具体的には、第1実施形態では、第1の所定期間内に他の複数の車両から受信した車両IDの実数を混雑度の指標とし、第2実施形態では、第2の所定期間内に前記他の複数の車両から受信した電波中のパケットの平均受信電力を、混雑度の指標とし、第3実施形態では、第3の所定期間内に他の複数の車両から受信した電波中のパケットのパケット誤り率を、混雑度の指標とするようになっている。しかし、マイクロコンピュータ13cは、他の複数の車両から受信した電波に基づいて、これら第1〜第3実施形態で示した情報以外の情報を取得し、それを混雑度の指標とするようになっていてもよい。
【0081】
また、第1実施形態においては、所定期間内に受信した車両情報パケットの送信元の車両の実数という指標に基づいて情報提供範囲を変化させ、第2実施形態においては、所定期間内の車両情報パケットの平均受信電力という指標に基づいて情報提供範囲を変化させ、第3実施形態においては、受信した車両情報パケットのパケット誤り率という指標に基づいて情報提供範囲を変化させている。しかし、これら3つの指標のうち2つ以上に基づいて情報提供範囲を変化させるようになっていてもよい。例えば、平均受信電力が通常範囲よりも大きく、かつ、パケット誤り率が通常よりも大きい場合にのみ、情報提供範囲を通常よりも小さくするようになっていてもよい。
【0082】
また、上記実施形態においては、情報提供範囲は、自車両の周囲の混雑度の指標(より具体的には、自車両の周囲が混雑するほど増大する量)に応じて変化するようになっているが、当該指標に加えて他の要因に応じて変化するようになっていてもよい。例えば、マイクロコンピュータ13cは、自車両の走行速度に応じて情報提供範囲の大きさを変化させるようになっていてもよい。
【0083】
また、上記実施形態においては、情報提供範囲は、自車両を中心とする所定の半径の円内であったが、必ずしもこのようになっておらずともよい。例えば情報提供範囲は、自車両を中心とする所定の矩形の範囲内であってもよいし、自車両を焦点の1つとする楕円の範囲内であってもよい。すなわち、情報提供範囲は、自車両を含む範囲内であれば足りる。
【0084】
また、無線機11と制御装置13とは、車内LAN(例えばEthernet(登録商標)規格に準じたLAN)を介して接続されていてもよい。その場合、送信パケット、受信パケット、受信電波強度を示す信号、パケットエラーレートを示す信号は、この車内LANを介して無線機11と制御装置13との間で授受される。
【0085】
また、上記の実施形態において、マイクロコンピュータ13cがプログラムを実行することで実現している各機能は、それらの機能を有するハードウェア(例えば回路構成をプログラムすることが可能なFPGA)を用いて実現するようになっていてもよい。
【符号の説明】
【0086】
1、2、51、52 道路
3、53 交差点
4〜8、33〜36、61〜70 車両
10 出会い頭衝突防止支援装置
11 無線機
12 ナビゲーション装置
13 制御装置
13a パケット受信保存バッファ
13b パケット送信保存バッファ
13c マイクロコンピュータ
21 自車情報送信機能
22 車両数計算機能
23 情報提供範囲決定機能
24 情報提供判断機能
25 受信電力計算機能
26 PER取得機能
40〜43 情報提供範囲
【特許請求の範囲】
【請求項1】
第1の車両(4)に搭載される出会い頭衝突防止支援装置であって、
他の複数の車両のそれぞれから送信された電波を受信し、受信した電波中から前記他の複数の車両のそれぞれの位置の情報を含むパケットを取得する受信手段(11)と、
前記他の複数の車両の位置の情報を、前記受信手段(11)が取得した前記パケットから読み出し、読み出した位置の情報に基づいて、前記第1の車両(4)を含む所定の情報提供範囲内に前記他の複数の車両のうち少なくとも1つがいるかを判定する判定手段(140、240、340)と、
前記情報提供範囲内に前記他の複数の車両の少なくとも1つがいると前記判定手段(140、240、340)が判定したことに基づいて、出会い頭衝突に対する警告の報知を行う情報提供手段(150、160、250、260、350、360)と、
前記受信手段(11)が他の複数の車両から受信した電波に基づいて、前記第1の車両(4)の周囲の車両の混雑度の指標を取得する混雑度指標取得手段(120、220、230)と、
前記混雑度指標取得手段(120、220、230)が取得した前記混雑度の指標に基づいて、前記第1の車両(4)の周囲の車両の混雑度が高いほど、前記情報提供範囲を狭くする範囲決定手段(130、230、330)と、を備えた出会い頭衝突防止支援装置。
【請求項2】
前記他の複数の車両のそれぞれから送信されて前記受信手段(11)が受信する電波中の前記パケットは、前記他の複数の車両の位置の情報と共に前記他の複数の車両の走行方向の情報を含み、
前記情報提供手段(150、160、250、260、350、360)は、前記情報提供範囲内に前記他の複数の車両の少なくとも1つがいると前記判定手段(140、240、340)が判定したことに基づいて、前記受信手段(11)が取得した前記パケット中の前記少なくとも1つの車両の走行方向の情報に基づいて、前記第1の車両(4)の走行方向と前記少なくとも1つの車両の走行方向が交差しているか否かを判定し、交差している車両がある場合に、出会い頭衝突に対する警告の報知を行うことを特徴とする請求項1に記載の出会い頭衝突防止支援装置。
【請求項3】
前記他の複数の車両のそれぞれから送信されて前記受信手段(11)が受信する電波中の前記パケットは、それぞれ前記他の複数の車両の位置の情報と共に前記他の複数の車両の車両IDを含み、
前記混雑度指標取得手段(120、220、230)は、第1の所定期間内に他の複数の車両から受信した車両IDの実数を、前記混雑度の指標として取得することを特徴とする請求項1または2に記載の出会い頭衝突防止支援装置。
【請求項4】
前記混雑度指標取得手段(120、220、230)は、第2の所定期間内に他の複数の車両から受信したパケットの平均受信電力を、前記混雑度の指標として取得することを特徴とする請求項1ないし3のいずれか1つに記載の出会い頭衝突防止支援装置。
【請求項5】
前記混雑度指標取得手段(120、220、230)は、第3の所定期間内に他の複数の車両から受信したパケットのパケット誤り率を、前記混雑度の指標として取得することを特徴とする請求項1ないし4のいずれか1つに記載の出会い頭衝突防止支援装置。
【請求項1】
第1の車両(4)に搭載される出会い頭衝突防止支援装置であって、
他の複数の車両のそれぞれから送信された電波を受信し、受信した電波中から前記他の複数の車両のそれぞれの位置の情報を含むパケットを取得する受信手段(11)と、
前記他の複数の車両の位置の情報を、前記受信手段(11)が取得した前記パケットから読み出し、読み出した位置の情報に基づいて、前記第1の車両(4)を含む所定の情報提供範囲内に前記他の複数の車両のうち少なくとも1つがいるかを判定する判定手段(140、240、340)と、
前記情報提供範囲内に前記他の複数の車両の少なくとも1つがいると前記判定手段(140、240、340)が判定したことに基づいて、出会い頭衝突に対する警告の報知を行う情報提供手段(150、160、250、260、350、360)と、
前記受信手段(11)が他の複数の車両から受信した電波に基づいて、前記第1の車両(4)の周囲の車両の混雑度の指標を取得する混雑度指標取得手段(120、220、230)と、
前記混雑度指標取得手段(120、220、230)が取得した前記混雑度の指標に基づいて、前記第1の車両(4)の周囲の車両の混雑度が高いほど、前記情報提供範囲を狭くする範囲決定手段(130、230、330)と、を備えた出会い頭衝突防止支援装置。
【請求項2】
前記他の複数の車両のそれぞれから送信されて前記受信手段(11)が受信する電波中の前記パケットは、前記他の複数の車両の位置の情報と共に前記他の複数の車両の走行方向の情報を含み、
前記情報提供手段(150、160、250、260、350、360)は、前記情報提供範囲内に前記他の複数の車両の少なくとも1つがいると前記判定手段(140、240、340)が判定したことに基づいて、前記受信手段(11)が取得した前記パケット中の前記少なくとも1つの車両の走行方向の情報に基づいて、前記第1の車両(4)の走行方向と前記少なくとも1つの車両の走行方向が交差しているか否かを判定し、交差している車両がある場合に、出会い頭衝突に対する警告の報知を行うことを特徴とする請求項1に記載の出会い頭衝突防止支援装置。
【請求項3】
前記他の複数の車両のそれぞれから送信されて前記受信手段(11)が受信する電波中の前記パケットは、それぞれ前記他の複数の車両の位置の情報と共に前記他の複数の車両の車両IDを含み、
前記混雑度指標取得手段(120、220、230)は、第1の所定期間内に他の複数の車両から受信した車両IDの実数を、前記混雑度の指標として取得することを特徴とする請求項1または2に記載の出会い頭衝突防止支援装置。
【請求項4】
前記混雑度指標取得手段(120、220、230)は、第2の所定期間内に他の複数の車両から受信したパケットの平均受信電力を、前記混雑度の指標として取得することを特徴とする請求項1ないし3のいずれか1つに記載の出会い頭衝突防止支援装置。
【請求項5】
前記混雑度指標取得手段(120、220、230)は、第3の所定期間内に他の複数の車両から受信したパケットのパケット誤り率を、前記混雑度の指標として取得することを特徴とする請求項1ないし4のいずれか1つに記載の出会い頭衝突防止支援装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2010−282282(P2010−282282A)
【公開日】平成22年12月16日(2010.12.16)
【国際特許分類】
【出願番号】特願2009−133211(P2009−133211)
【出願日】平成21年6月2日(2009.6.2)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成22年12月16日(2010.12.16)
【国際特許分類】
【出願日】平成21年6月2日(2009.6.2)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]