
出力トルクの算出装置
【課題】エンジンの将来の出力トルクを精度よく算出する。
【解決手段】ドライバの操作、車両の挙動およびオートマチックトランスミッションの変速のための要求などに基づいてエンジンの第1目標トルクが設定される。第1目標トルクとエンジンの実際の出力トルクとの差が小さくなるようにエンジンが制御される。エンジンの運転状態から検出トルクが算出される。第1目標トルクから、エンジンの制御上の無駄時間が加味された算出トルクが算出されるとともに、検出トルクと算出トルクとの誤差eに応じて第1目標トルクをフィードバック補正することにより、エンジンにおける無駄時間が除かれた第1先読みトルクが算出される。
【解決手段】ドライバの操作、車両の挙動およびオートマチックトランスミッションの変速のための要求などに基づいてエンジンの第1目標トルクが設定される。第1目標トルクとエンジンの実際の出力トルクとの差が小さくなるようにエンジンが制御される。エンジンの運転状態から検出トルクが算出される。第1目標トルクから、エンジンの制御上の無駄時間が加味された算出トルクが算出されるとともに、検出トルクと算出トルクとの誤差eに応じて第1目標トルクをフィードバック補正することにより、エンジンにおける無駄時間が除かれた第1先読みトルクが算出される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、出力トルクの算出装置に関し、特に、駆動源における無駄時間が除かれた出力トルクを算出する技術に関する。
【背景技術】
【0002】
従来より、自動的に変速を行なう自動変速機が知られている。自動変速機は、たとえば複数の摩擦係合要素のうちの、係合する摩擦係合要素の組合せに応じたギヤを形成する。摩擦係合要素の係合力は、摩擦係合要素に供給される油圧に応じて定まる。すなわち、自動変速機は油圧により作動する。油圧は、たとえばエンジンにより駆動されるオイルポンプにより発生される。
【0003】
燃費を向上するためには、オイルポンプの負荷をできるだけ小さくすることが望ましい。オイルポンプの負荷を小さくするためには、摩擦係合要素に供給される油圧を低くすればよい。しかしながら、摩擦係合要素の供給される油圧が低すぎると、摩擦係合要素が滑り得る。したがって、自動変速機の入力トルク、すなわちエンジンの出力トルクを正確に把握し、エンジンの出力トルクに対して過不足のない油圧を実現することが望ましい。
【0004】
特開2006−46177号公報(特許文献1)は、エンジンの回転数および各気筒の点火時期に基づいて、第1のエンジントルクを算出するステップと、各気筒の点火時期の変動量に基づいて、第1のエンジントルクをなまし処理することにより自動変速機の制御に用いられる第2のエンジントルクを算出するステップとを含む、エンジンのトルク算出方法を開示する。
【0005】
この公報に記載のトルク算出方法によれば、エンジンの回転数に基づいて、第1のエンジントルク(実エンジン図示トルク)が算出される。たとえば、実エンジン図示トルクを繰返し算出し、前回算出された実エンジン図示トルクおよび今回算出された実エンジン図示トルクの差に基づいて算出された加算値を、前回算出された実エンジン図示トルクに加算するなまし処理により、第2のエンジントルク(実エンジン正味トルク)が算出される。点火時期の変動量が大きい場合は、小さい場合に比べて、加算値は抑制される。これにより、実エンジン図示トルクの変動量が大きい場合であっても、なまし処理により、滑らかに変動する実エンジン正味トルクを算出することができる。そのため、実エンジン正味トルクの急変を抑制することができる。その結果、自動変速機の制御に好ましいトルクを算出することができる。
【特許文献1】特開2006−46177号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
自動変速機の制御に用いられる油圧を所望の油圧に調圧するには、ある程度時間が必要である。したがって、エンジンの運転状態に基づいて得られた出力トルクに対して過不足のない油圧を即座に得られるとは限らない。油圧を調圧している間に出力トルクが変化した場合、油圧が目標値に達しても、その時の出力トルクに対して油圧が過剰であったり不足したりし得る。よって、エンジンの出力トルクと自動変速機の制御に用いられる油圧とを精度よく対応させるためには、将来の出力トルクを予め把握しておき、将来の出力トルクに対して過不足が無いように油圧を前もって調圧することが望ましい。しかしながら、特開2006−46177号公報に記載のトルク算出方法により算出される実エンジン正味トルクは、実時間におけるエンジンの運転状態に基づいた出力トルクであるため、将来の出力トルクではない。
【0007】
本発明は、上述の課題を解決するためになされたものであって、その目的は、駆動源の将来の出力トルクを精度よく算出することができる出力トルクの算出装置を提供することである。
【課題を解決するための手段】
【0008】
第1の発明に係る出力トルクの算出装置は、駆動源の目標トルクを設定するための設定手段と、駆動源の運転状態を検出するための検出手段と、駆動源の運転状態に応じて駆動源の第1の出力トルクを算出するための第1の算出手段と、駆動源における無駄時間が加味された駆動源の第2の出力トルクを目標トルクから算出するとともに、第1の出力トルクと第2の出力トルクとの差に応じて目標トルクを補正することにより、駆動源における無駄時間が除かれた駆動源の第3の出力トルクを目標トルクから算出するための第2の算出手段とを備える。
【0009】
この構成によると、駆動源の目標トルクが設定される。駆動源の実際の出力トルクは、目標トルクに対して1次遅れおよび無駄時間などの分だけ遅れて実現される。また、駆動源の実際の出力トルクは、外乱(たとえば摩擦抵抗の変化)などの影響を受けて、目標トルクとは異なり得る。駆動源の実際の出力トルクを得るために、駆動源の運転状態に応じて駆動源の第1の出力トルクが算出される。これにより、駆動源の実際の運転状態に応じて、駆動源の実際の出力トルクを表わす第1の出力トルクを精度よく得ることができる。第1の出力トルクとは別に、駆動源における無駄時間が加味された駆動源の第2の出力トルクが目標トルクから算出される。これにより、駆動源の実際の出力トルクを表わす第2の出力トルクを演算により得ることができる。第1の出力トルクと第2の出力トルクとの差、すなわち、目標トルクから第2の出力トルクを算出するために用いられる演算において生じる誤差に応じて目標トルクを補正することにより、駆動源における無駄時間が除かれた駆動源の第3の出力トルクが目標トルクから算出される。これにより、駆動源の運転状態に基づいて得られる第1の出力トルクと同程度の精度を有する将来の出力トルクを、駆動源の実際の出力トルクよりも無駄時間の分だけ早く得ることができる。そのため、駆動源の将来の出力トルクを精度よく算出することができる出力トルクの算出装置を提供することができる。
【0010】
第2の発明に係る出力トルクの算出装置においては、第1の発明の構成に加え、設定手段は、複数の種類のトルクを考慮して第1の目標トルクを設定するための手段と、複数の種類のトルクのうちの少なくともいずれか一つのトルクが除かれた第2の目標トルクを設定するための手段とを含む。第2の算出手段は、駆動源における無駄時間が加味された駆動源の第2の出力トルクを第1の目標トルクから算出するとともに、第1の出力トルクと第2の出力トルクとの差に応じて第2の目標トルクを補正することにより、駆動源における無駄時間が除かれた駆動源の第3の出力トルクを第2の目標トルクから算出するための手段を含む。
【0011】
この構成によると、複数の種類のトルクを考慮した第1の目標トルクを用いて算出された、第1の出力トルクと第2の出力トルクとの差に応じて、第3の出力トルクが、複数の種類のトルクのうちの少なくともいずれか一つのトルクが除かれた第2の目標トルクから算出される。これにより、複数の種類のトルクのうちのいずれかのトルクが除かれた第2の目標トルクが実現されることが無くても、駆動源の運転状態から得られる第1の出力トルクと同程度の精度を有する出力トルクを、駆動源の実際の出力トルクよりも無駄時間の分だけ早く得ることができる。そのため、たとえば変速時のショックを低減するために過渡的に要求されるトルクなどの、自動変速機の油圧の制御に対しては必要のないトルクが除かれた目標トルクから、自動変速機の油圧の制御に用いるべき出力トルクを無駄時間分だけ早く得ることができる。その結果、自動変速機の油圧の制御に対しては必要のないトルクが除かれた出力トルクを用いて、自動変速機を安定的に制御することができる。
【0012】
第3の発明に係る出力トルクの算出装置は、第1または2の発明の構成に加え、第3の出力トルクに対して予め定められた時間だけ遅れた出力トルクを算出するための手段をさらに備える。
【0013】
この構成によると、駆動源の実際の出力トルクよりも無駄時間の分だけ早く得られた将来の出力トルクに対して、予め定められた時間だけ遅れた出力トルクが算出される。これにより、将来の出力トルクを駆動源の実際の出力トルクよりも所望の時間だけ早く得ることができる。そのため、目標トルクに対応するトルクが実現される時期と、将来の出力トルクを用いた制御が実現される時期とを精度よく一致させることができる。
【0014】
第4の発明に係る出力トルクの算出装置は、第1〜3のいずれかの発明の構成に加え、第1の出力トルクと第2の出力トルクとの差に応じた補正量を、駆動源の運転状態毎に学習するための手段をさらに備える。第2の算出手段は、学習された補正量を用いて第3の出力トルクを算出するための手段を含む。
【0015】
この構成によると、第1の出力トルクと第2の出力トルクとの差に応じた補正量が、駆動源の運転状態毎に学習される。学習された補正量に応じて目標トルクを補正することにより、駆動源における無駄時間が除かれた駆動源の第3の出力トルクが目標トルクから算出される。これにより、駆動源の実際の運転状態から算出される第1の出力トルクと目標トルクから算出される第2の出力トルクとの差に応じた補正量が、駆動源の運転状態に応じて変化する場合であっても、駆動源における無駄時間が除かれた第3の出力トルクを目標トルクから速やかに算出することができる。そのため、第1の出力トルクと第2の出力トルクとの差に応じた補正量を算出するために生じ得る遅れを短くすることができる。
【0016】
第5の発明に係る出力トルクの算出装置においては、第1〜4のいずれかの発明の構成に加え、駆動源は内燃機関である。検出手段は、内燃機関に吸入される空気量を検出するための手段を含む。第1の算出手段は、検出された空気量に応じて内燃機関の第1の出力トルクを算出するための手段を含む。
【0017】
この構成によると、内燃機関に吸入される空気量から、内燃機関の実際の出力トルクを表わす第1の出力トルクを精度よく算出することができる。
【発明を実施するための最良の形態】
【0018】
以下、図面を参照しつつ、本発明の実施の形態について説明する。以下の説明では、同一の部品には同一の符号を付してある。それらの名称および機能も同一である。したがって、それらについての詳細な説明は繰返さない。
【0019】
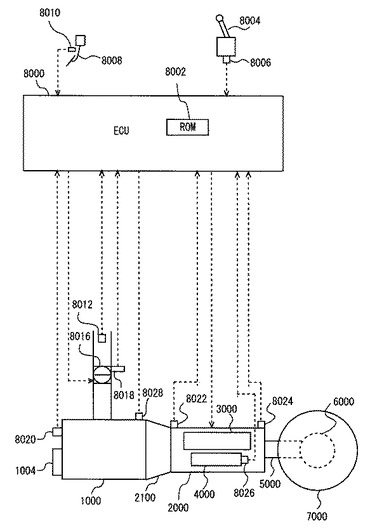
図1を参照して、本発明の実施の形態に係る制御装置を有する車両について説明する。この車両は、FR(Front engine Rear drive)車両である。なお、FR以外の車両であってもよい。
【0020】
車両は、エンジン1000と、オートマチックトランスミッション2000と、トルクコンバータ2100と、オートマチックトランスミッション2000の一部を構成するプラネタリギヤユニット3000と、オートマチックトランスミッション2000の一部を構成する油圧回路4000と、プロペラシャフト5000と、デファレンシャルギヤ6000と、後輪7000と、ECU(Electronic Control Unit)8000とを含む。
【0021】
エンジン1000は、インジェクタ(図示せず)から噴射された燃料と空気との混合気を、シリンダの燃焼室内で燃焼させる内燃機関である。燃焼によりシリンダ内のピストンが押し下げられて、クランクシャフトが回転させられる。エンジン1000により、オルタネータおよびエアコンディショナーなどの補機1004が駆動される。エンジン1000の出力トルク(エンジントルクTE)は、電子スロットルバルブ8016の作動量、すなわちスロットル開度などに応じて変化する。なお、エンジン1000の代わりにもしくは加えて、動力源にモータを用いるようにしてもよい。また、ディーゼルエンジンを用いるようにしてもよい。ディーゼルエンジンにおいては、インジェクタの開弁時間(作動量)、すなわち燃料噴射量に応じて出力トルクが変化する。
【0022】
オートマチックトランスミッション2000は、トルクコンバータ2100を介してエンジン1000に連結される。オートマチックトランスミッション2000は、所望のギヤ段を形成することにより、クランクシャフトの回転数を所望の回転数に変速する。なお、ギヤ段を形成するオートマチックトランスミッションの代わりに、ギヤ比を無段階に変更するCVT(Continuously Variable Transmission)を搭載するようにしてもよい。さらに、油圧アクチュエータもしくは電動モータにより変速される常時噛合式歯車からなる自動変速機を搭載するようにしてもよい。
【0023】
オートマチックトランスミッション2000から出力されたトルクは、プロペラシャフト5000およびデファレンシャルギヤ6000を介して、左右の後輪7000に伝達される。
【0024】
ECU8000には、シフトレバー8004のポジションスイッチ8006と、アクセルペダル8008のアクセル開度センサ8010と、エアフローメータ8012と、電子スロットルバルブ8016のスロットル開度センサ8018と、エンジン回転数センサ8020と、入力軸回転数センサ8022と、出力軸回転数センサ8024と、油温センサ8026と、水温センサ8028とがハーネスなどを介して接続されている。
【0025】
シフトレバー8004の位置(シフトポジション)は、ポジションスイッチ8006により検出され、検出結果を表す信号がECU8000に送信される。シフトレバー8004の位置に対応して、オートマチックトランスミッション2000のギヤ段が自動で形成される。また、運転者の操作に応じて、運転者が任意のギヤ段を選択できるマニュアルシフトモードを選択できるように構成してもよい。
【0026】
アクセル開度センサ8010は、アクセルペダル8008の開度を検出し、検出結果を表す信号をECU8000に送信する。エアフローメータ8012は、エンジン1000に吸入される空気量を検出し、検出結果を表す信号をECU8000に送信する。
【0027】
スロットル開度センサ8018は、アクチュエータにより開度が調整される電子スロットルバルブ8016の開度を検出し、検出結果を表す信号をECU8000に送信する。電子スロットルバルブ8016により、エンジン1000に吸入される空気量が調整される。
【0028】
なお、電子スロットルバルブ8016の代わりにもしくは加えて、吸気バルブ(図示せず)や排気バルブ(図示せず)のリフト量や開閉する位相を変更する可変バルブリフトシステムにより、エンジン1000に吸入される空気量を調整するようにしてもよい。
【0029】
エンジン回転数センサ8020は、エンジン1000の出力軸(クランクシャフト)の回転数(以下、エンジン回転数NEとも記載する)を検出し、検出結果を表す信号をECU8000に送信する。入力軸回転数センサ8022は、オートマチックトランスミッション2000の入力軸回転数NI(トルクコンバータ2100のタービン回転数NT)を検出し、検出結果を表す信号をECU8000に送信する。出力軸回転数センサ8024は、オートマチックトランスミッション2000の出力軸回転数NOを検出し、検出結果を表す信号をECU8000に送信する。
【0030】
油温センサ8026は、オートマチックトランスミッション2000の作動や潤滑に用いられるオイル(ATF:Automatic Transmission Fluid)の温度(油温)を検出し、検出結果を表す信号をECU8000に送信する。
【0031】
水温センサ8028は、エンジン1000の冷却水の温度(水温)を検出し、検出結果を表わす信号をECU8000に送信する。
【0032】
ECU8000は、ポジションスイッチ8006、アクセル開度センサ8010、エアフローメータ8012、スロットル開度センサ8018、エンジン回転数センサ8020、入力軸回転数センサ8022、出力軸回転数センサ8024、油温センサ8026、水温センサ8028などから送られてきた信号、ROM(Read Only Memory)8002に記憶されたマップおよびプログラムに基づいて、車両が所望の走行状態となるように、機器類を制御する。
【0033】
本実施の形態においては、ドライバの操作(アクセル開度、車速)、車両の挙動およびオートマチックトランスミッション2000の変速のための要求などに基づいてエンジンの目標トルクが設定される。より具体的には、ドライバの操作および車両の挙動などに基づいて車両の駆動力が設定され、オートマチックトランスミッション2000のギヤ比などを考慮して駆動力がトルクに変換される。得られたトルクに、オートマチックトランスミッション2000の変速のための要求などに基づくトルクが加味されて、目標トルクが設定される。目標トルクを実現するように、エンジン1000が制御される。
【0034】
オートマチックトランスミッション2000の油圧制御は、エンジン1000の出力トルクに基づいて実行される。なお、エンジン1000およびオートマチックトランスミッション2000の制御方法はこれに限らない。また、ECU8000により実行されるプログラムをCD(Compact Disc)、DVD(Digital Versatile Disc)などの記録媒体に記録して市場に流通させてもよい。また、ECU8000を複数のECUに分割するようにしてもよい。
【0035】
本実施の形態において、ECU8000は、シフトレバー8004がD(ドライブ)ポジションであることにより、オートマチックトランスミッション2000のシフトレンジにD(ドライブ)レンジが選択された場合、前進1速〜8速ギヤ段のうちのいずれかのギヤ段が形成されるように、オートマチックトランスミッション2000を制御する。オートマチックトランスミッション2000の入力軸と出力軸とを連結するように、後述する摩擦係合要素(クラッチおよびブレーキ)が予め定められた組合せで係合されることにより、ギヤ段が形成される。前進1速〜8速ギヤ段のうちのいずれかのギヤ段が形成されると、後輪7000にトルクが伝達され得る。なおDレンジにおいて、8速ギヤ段よりも高速のギヤ段を形成可能であるようにしてもよい。形成するギヤ段は、車速とアクセル開度とをパラメータとして実験等により予め作成された変速線図に基づいて決定される。
【0036】
シフトレバー8004がN(ニュートラル)ポジションもしくはP(パーキング)ポジションであることにより、オートマチックトランスミッション2000のシフトレンジにN(ニュートラル)レンジもしくはP(パーキング)レンジが選択された場合、摩擦係合要素が解放され、オートマチックトランスミッション2000はニュートラル状態になる。ニュートラル状態では、オートマチックトランスミッション2000の入力軸と出力軸とが遮断される。
【0037】
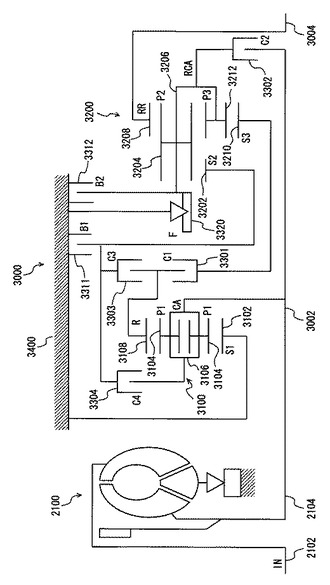
図2を参照して、プラネタリギヤユニット3000について説明する。プラネタリギヤユニット3000は、クランクシャフトに連結された入力軸2102を有するトルクコンバータ2100に接続されている。
【0038】
プラネタリギヤユニット3000は、フロントプラネタリ3100と、リアプラネタリ3200と、C1クラッチ3301と、C2クラッチ3302と、C3クラッチ3303と、C4クラッチ3304と、B1ブレーキ3311と、B2ブレーキ3312と、ワンウェイクラッチ(F)3320とを含む。
【0039】
フロントプラネタリ3100は、ダブルピニオン型の遊星歯車機構である。フロントプラネタリ3100は、第1サンギヤ(S1)3102と、1対の第1ピニオンギヤ(P1)3104と、キャリア(CA)3106と、リングギヤ(R)3108とを含む。
【0040】
第1ピニオンギヤ(P1)3104は、第1サンギヤ(S1)3102および第1リングギヤ(R)3108と噛合っている。第1キャリア(CA)3106は、第1ピニオンギヤ(P1)3104が公転および自転可能であるように支持している。
【0041】
第1サンギヤ(S1)3102は、回転不能であるようにギヤケース3400に固定される。第1キャリア(CA)3106は、プラネタリギヤユニット3000の入力軸3002に連結される。
【0042】
リアプラネタリ3200は、ラビニヨ型の遊星歯車機構である。リアプラネタリ3200は、第2サンギヤ(S2)3202と、第2ピニオンギヤ(P2)3204と、リアキャリア(RCA)3206と、リアリングギヤ(RR)3208と、第3サンギヤ(S3)3210と、第3ピニオンギヤ(P3)3212とを含む。
【0043】
第2ピニオンギヤ(P2)3204は、第2サンギヤ(S2)3202、リアリングギヤ(RR)3208および第3ピニオンギヤ(P3)3212と噛合っている。第3ピニオンギヤ(P3)3212は、第2ピニオンギヤ(P2)3204に加えて、第3サンギ
ヤ(S3)3210と噛合っている。
【0044】
リアキャリア(RCA)3206は、第2ピニオンギヤ(P2)3204および第3ピニオンギヤ(P3)3212が公転および自転可能であるように支持している。リアキャリア(RCA)3206は、ワンウェイクラッチ(F)3320に連結される。リアキャリア(RCA)3206は、1速ギヤ段の駆動時(エンジン1000から出力された駆動力を用いた走行時)に回転不能となる。リアリングギヤ(RR)3208は、プラネタリギヤユニット3000の出力軸3004に連結される。
【0045】
ワンウェイクラッチ(F)3320は、B2ブレーキ3312と並列に設けられる。すなわち、ワンウェイクラッチ(F)3320のアウターレースはギヤケース3400に固定され、インナーレースはリアキャリア(RCA)3206に連結される。
【0046】
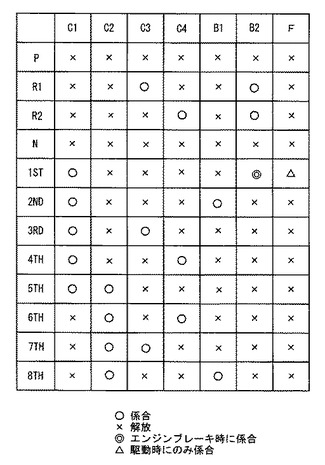
図3に、各変速ギヤ段と、各クラッチおよび各ブレーキの作動状態との関係を表した作動表を示す。この作動表に示された組み合わせで各ブレーキおよび各クラッチを作動させることにより、前進1速〜8速のギヤ段と、後進1速および2速のギヤ段が形成される。
【0047】
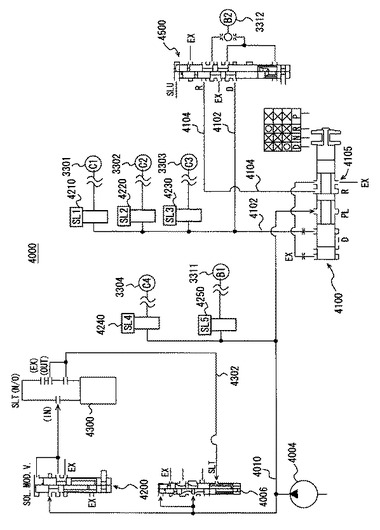
図4を参照して、油圧回路4000の要部について説明する。なお、油圧回路4000は、以下に説明するものに限られない。
【0048】
油圧回路4000は、オイルポンプ4004と、プライマリレギュレータバルブ4006と、マニュアルバルブ4100と、ソレノイドモジュレータバルブ4200と、SL1リニアソレノイド(以下、SL(1)と記載する)4210と、SL2リニアソレノイド(以下、SL(2)と記載する)4220と、SL3リニアソレノイド(以下、SL(3)と記載する)4230と、SL4リニアソレノイド(以下、SL(4)と記載する)4240と、SL5リニアソレノイド(以下、SL(5)と記載する)4250と、SLTリニアソレノイド(以下、SLTと記載する)4300と、B2コントロールバルブ4500とを含む。
【0049】
オイルポンプ4004は、エンジン1000のクランクシャフトに連結されている。クランクシャフトが回転することにより、オイルポンプ4004が駆動し、油圧を発生する。オイルポンプ4004で発生した油圧は、プライマリレギュレータバルブ4006により調圧され、ライン圧が生成される。
【0050】
プライマリレギュレータバルブ4006は、SLT4300により調圧されたスロットル圧をパイロット圧として作動する。ライン圧は、ライン圧油路4010を介してマニュアルバルブ4100に供給される。
【0051】
マニュアルバルブ4100は、ドレンポート4105を含む。ドレンポート4105から、Dレンジ圧油路4102およびRレンジ圧油路4104の油圧が排出される。マニュアルバルブ4100のスプールがDポジションにある場合、ライン圧油路4010とDレンジ圧油路4102とが連通させられ、Dレンジ圧油路4102に油圧が供給される。このとき、Rレンジ圧油路4104とドレンポート4105とが連通させられ、Rレンジ圧油路4104のRレンジ圧がドレンポート4105から排出される。
【0052】
マニュアルバルブ4100のスプールがRポジションにある場合、ライン圧油路4010とRレンジ圧油路4104とが連通させられ、Rレンジ圧油路4104に油圧が供給される。このとき、Dレンジ圧油路4102とドレンポート4105とが連通させられ、Dレンジ圧油路4102のDレンジ圧がドレンポート4105から排出される。
【0053】
マニュアルバルブ4100のスプールがNポジションもしくはPポジションにある場合、Dレンジ圧油路4102およびRレンジ圧油路4104の両方と、ドレンポート4105とが連通させられ、Dレンジ圧油路4102のDレンジ圧およびRレンジ圧油路4104のRレンジ圧がドレンポート4105から排出される。
【0054】
Dレンジ圧油路4102に供給された油圧は、最終的には、C1クラッチ3301、C2クラッチ3302およびC3クラッチ3303に供給される。Rレンジ圧油路4104に供給された油圧は、最終的には、B2ブレーキ3312に供給される。
【0055】
ソレノイドモジュレータバルブ4200は、ライン圧を元圧とし、SLT4300に供給する油圧(ソレノイドモジュレータ圧)を一定の圧力に調圧する。
【0056】
SL(1)4210は、C1クラッチ3301に供給される油圧を調圧する。SL(2)4220は、C2クラッチ3302に供給される油圧を調圧する。SL(3)4230は、C3クラッチ3303に供給される油圧を調圧する。SL(4)4240は、C4クラッチ3304に供給される油圧を調圧する。SL(5)4250は、B1ブレーキ3311に供給される油圧を調圧する。
【0057】
SLT4300は、アクセル開度センサ8010により検出されたアクセル開度に基づいたECU8000からの制御信号に応じて、ソレノイドモジュレータ圧を調圧し、スロットル圧を生成する。スロットル圧は、SLT油路4302を介して、プライマリレギュレータバルブ4006に供給される。スロットル圧は、プライマリレギュレータバルブ4006のパイロット圧として利用される。
【0058】
SL(1)4210、SL(2)4220、SL(3)4230、SL(4)4240、SL(5)4250およびSLT4300は、ECU8000から送信される制御信号により制御される。
【0059】
B2コントロールバルブ4500は、Dレンジ圧油路4102およびRレンジ圧油路4104のいずれか一方からの油圧を選択的に、B2ブレーキ3312に供給する。B2コントロールバルブ4500に、Dレンジ圧油路4102およびRレンジ圧油路4104が接続されている。B2コントロールバルブ4500は、SLUソレノイドバルブ(図示せず)から供給された油圧とスプリングの付勢力とにより制御される。
【0060】
SLUソレノイドバルブがオンの場合、B2コントロールバルブ4500は、図4において左側の状態となる。この場合、B2ブレーキ3312には、SLUソレノイドバルブから供給された油圧をパイロット圧として、Dレンジ圧を調圧した油圧が供給される。
【0061】
SLUソレノイドバルブがオフの場合、B2コントロールバルブ4500は、図4において右側の状態となる。この場合、B2ブレーキ3312には、Rレンジ圧が供給される。
【0062】
図5を参照して、ECU8000についてさらに説明する。なお、以下に説明するECU8000の各機能は、ハードウエアにより実現するようにしてもよく、ソフトウエアにより実現するようにしてもよい。
【0063】
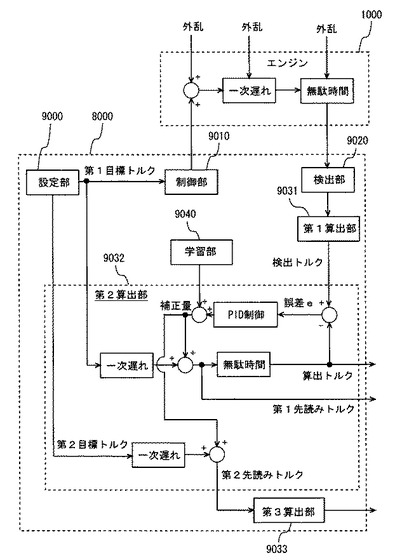
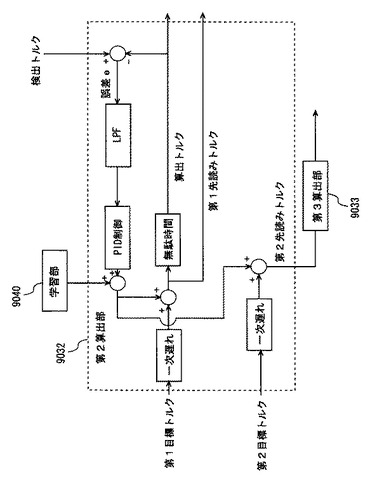
ECU8000は、設定部9000と、制御部9010と、検出部9020と、第1算出部9031と、第2算出部9032と、第3算出部9033と、学習部9040とを備える。
【0064】
設定部9000は、ドライバの操作、車両の挙動およびオートマチックトランスミッション2000の変速のための要求などに基づいてエンジン1000の第1目標トルクを設定する。
【0065】
たとえば、実験およびシミュレーションの結果などに基づいて予め定められたマップに従って、アクセル開度および車速などから、ドライバの操作に基づいた出力トルクが設定される。
【0066】
また、VDIM(Vehicle Dynamics Integrated Management)、制振制御、クルーズコントロールなどによりエンジン1000の出力トルクが設定される。
【0067】
VDIMは、VSC(Vehicle Stability Control)、TRC(TRaction Control)、ABS(Anti lock Brake System)、EPS(Electric Power Steering)などを統合するシステムであって、アクセル、ステアリング、ブレーキの操作量によるドライバの走行イメージと、各種センサ情報による車両挙動との差を算出し、その差を縮めるように車両の駆動力(エンジン1000の出力トルク)、ブレーキ油圧などを制御する。
【0068】
VSCは、前後輪が横滑りしそうな状態をセンサが検出した場合において、各輪のブレーキ油圧および車両の駆動力(エンジン1000の出力トルク)などを自動的に設定し、車両の安定性を確保する制御である。
【0069】
TRCは、滑りやすい路面での発進時および加速時に、駆動輪の空転をセンサが感知すると、各輪のブレーキ油圧および車両の駆動力(エンジン1000の出力トルク)などを自動的に設定し、最適な駆動力を確保する制御である。
【0070】
ABSは、ブレーキ油圧の最適値を自動的に設定し、車輪のロックを防止する制御システムである。EPSは、電動モータの力によってステアリングホイールの操舵をアシストする制御システムである。
【0071】
制振制御は、車両の実際の駆動力などから、車両モデルを用いて算出される車両のピッチングおよびバウンシングを抑制するための駆動力(エンジン1000の出力トルク)を設定する制御である。車両のピッチングおよびバウンシングを抑制するための駆動力を設定する方法については、従来の技術を利用すればよいため、ここではその詳細な説明は繰り返さない。
【0072】
クルーズコントールは、車速を予め定められた車速に維持するための駆動力(エンジン1000の出力トルク)を設定する制御である。
【0073】
さらに、オートマチックトランスミッション2000の変速時に発生し得るショックなどを低減するためのトルクダウンもしくはトルクアップを実現し得るような出力トルクが設定される。
【0074】
ECU8000は、これらの出力トルクを調停したり、加減算したりすることにより、最終的なエンジン1000の第1目標トルクを設定する。たとえば、ドライバの操作に基づいた出力トルクおよび車両の挙動に基づいたトルクのうちの最も小さい出力トルクもしくは最も大きい出力トルクが選択される。選択された出力トルクに対して、オートマチックトランスミッション2000の変速のための要求に基づく出力トルクを加算もしくは減算することにより、エンジン1000の目標トルクが設定される。なお、第1目標トルクの設定方法はこれに限らない。
【0075】
また、ECU8000は、ドライバの操作、車両の挙動およびオートマチックトランスミッション2000の変速のための要求などに基づく出力トルクのうちの、少なくともいずれか一つの出力トルクが除かれた第2目標トルクを設定する。
【0076】
たとえば、オートマチックトランスミッション2000の変速のための要求に基づく出力トルクが除かれた第2目標トルクが設定される。すなわち、ドライバの操作および車両の挙動に基づいて第2目標トルクが設定される。
【0077】
ドライバの操作に基づいた出力トルクおよび車両の挙動に基づいたトルクのうちの最も小さい出力トルクもしくは最も大きい出力トルクが、第2目標トルクとして設定される。なお、第2目標トルクの設定方法はこれに限らない。ドライバの操作または車両の挙動に基づく出力トルクを除いて第2目標トルクが設定するようにしてもよい。
【0078】
制御部9010は、第1目標トルクとエンジン1000の実際の出力トルクとの差が小さくなるようにエンジン1000を制御する。より具体的には、第1目標トルクとエンジン1000の実際の出力トルクとの差が小さくなるように、すなわち、エンジン1000の実際の出力トルクが第1目標トルクに一致するように、スロットル開度、点火時期、燃料噴射量などが制御される。
【0079】
検出部9020は、エンジン1000の運転状態を検出する。検出される運転状態には、エンジン1000に吸入される空気量(吸気量)、エンジン回転数NEなどが含まれる。
【0080】
第1算出部9031は、エンジン1000の運転状態に応じてエンジン1000の実際の出力トルクを算出(推定)する。たとえば、吸気量およびエンジン回転数などをパラメータとして有するマップに従って、エンジン1000の実際の出力トルクが算出される。
【0081】
なお、吸気量の代わりに吸気管内の圧力を用いてもよい。また、トルクセンサによりエンジン1000の出力トルクを直接検出するようにしてもよい。エンジン1000の運転状態に応じてエンジン1000の実際の出力トルクを算出する方法については、周知の一般的な技術を利用すればよいため、ここではさらなる詳細な説明は繰り返さない。
【0082】
以下、検出された運転状態に基づいて算出されるエンジン1000の出力トルクを検出トルクとも記載する。エンジン1000の検出トルクには、エンジン1000の制御上の一次遅れならびに無駄時間が反映される。
【0083】
第2算出部9032は、エンジン1000の制御上の一次遅れならびに無駄時間が加味された、エンジン1000の実際の出力トルクを、第1目標トルクから算出する。以下、第1目標トルクから算出されるエンジン1000の出力トルクを算出トルクとも記載する。
【0084】
算出トルクは、たとえばエンジン回転数NEなどの運転状態ならびに第1目標トルクをパラメータとして有するマップなどに従って、エンジン1000の制御上の一次遅れならびに無駄時間を反映するように算出される。
【0085】
また、第2算出部9032は、検出トルクと算出トルクとの誤差eに応じて第1目標トルクをフィードバック補正することにより、エンジン1000における無駄時間が除かれた、エンジン1000の出力トルクを第1目標トルクから算出する。以下、第1目標トルクから算出される、エンジン1000における無駄時間が除かれたエンジン1000の出力トルクを第1先読みトルクとも記載する。
【0086】
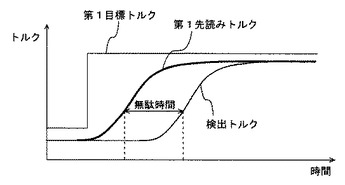
第1目標トルクの補正量は、PID(Proportion Integration Differential)制御により定められる。すなわち、検出トルクと算出トルクとの誤差eが小さくなるように、PID制御により第1目標トルクの補正量が定められる。たとえば、検出トルクと算出トルクとの誤差e、誤差eの微分値および誤差eの積分値が大きいほどより大きくなるように補正量が定められる。なお、補正量を定める方法はこれに限らない。
【0087】
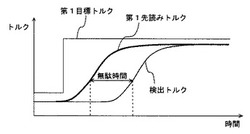
検出トルクと算出トルクとの誤差eに応じた補正量を用いて第1目標トルクをフィードバック補正することにより、図6に示すように、エンジン1000の運転状態から得られる検出トルクと同程度の精度を有する将来の出力トルクを、第1目標トルクに応じたトルクが実現される時期よりも無駄時間の分だけ早く第1先読みトルクとして得ることができる。そのため、エンジン1000の将来の出力トルクを精度よく算出することができる。
【0088】
本実施の形態においては、第1先読みトルクを用いてエンジン1000以外の制御システム(たとえば、VSCおよびクルーズコントロール)が制御される。これにより、エンジン1000以外の制御システムにおける無駄時間の分だけ早めに制御システムを作動することができる。そのため、第1目標トルクに対応する出力トルクが実現される時期と、エンジン1000以外の制御システムにおける制御が実現される時期との差を小さくすることができる。その結果、エンジン1000の実際の出力トルクに応じて、精度よく制御システムを作動することができる。
【0089】
図5に戻って、さらに、第2算出部9032は、検出トルクと算出トルクとの誤差eに応じて第2目標トルクを補正することにより、エンジン1000における無駄時間が除かれた、エンジン1000の出力トルクを第2目標トルクから算出する。以下、第2目標トルクから算出される、エンジン1000における無駄時間が除かれたエンジン1000の出力トルクを第2先読みトルクとも記載する。第2先読みトルクには1次遅れが反映される。
【0090】
第2目標トルクの補正量は、第1目標トルクの補正量と同じである。すなわち、オートマチックトランスミッション2000の変速のための要求に基づく出力トルクを含む第1目標トルクを用いて算出される、検出トルクと算出トルクとの誤差eに応じて、オートマチックトランスミッション2000の変速のための要求に基づく出力トルクが除かれた第2目標トルクを補正することにより、第2先読みトルクが算出される。
【0091】
仮に第2目標トルクを実現するようにエンジン1000を制御した場合にエンジン1000の運転状態から得られる検出トルクと第2目標トルクから得られる算出トルクとの誤差は、第1目標トルクを実現するようにエンジン1000を制御した場合の検出トルクと第1目標トルクから得られる算出トルクとの誤差eと同程度と考えられるからである。
【0092】
これにより、第2目標トルクが実現されることが無くても、運転状態から得られる出力トルクと同程度の精度を有する出力トルクを、第2先読みトルクとしてエンジン1000の実際の出力トルクよりも無駄時間の分だけ早く得ることができる。
【0093】
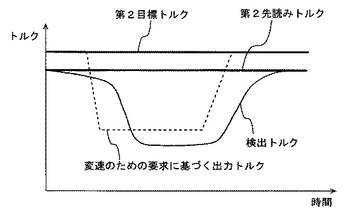
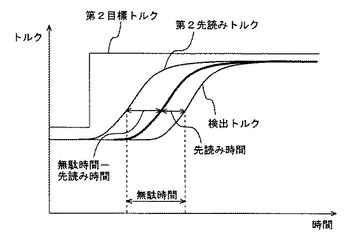
本実施の形態においては、オートマチックトランスミッション2000の変速のための要求に基づく出力トルクが除かれた第2目標トルクから、第2先読みトルクが算出される。これにより、図7に示すように、変速時のショックを低減するために過渡的に要求されるトルクなどが除かれた第2目標トルクから、第2先読みトルクを無駄時間分だけ早く得ることができる。
【0094】
第2先読みトルクは、たとえばオートマチックトランスミッション2000の油圧回路4000におけるライン圧ならびに摩擦係合要素に供給する油圧を定めるために用いられる。すなわち、ライン圧ならびに摩擦係合要素に供給する油圧は、第2先読みトルクに応じて制御される。そのため、オートマチックトランスミッション2000の油圧の制御に対しては必要のないトルクが除かれた第2先読みトルクを用いて、オートマチックトランスミッション2000を安定的に制御することができる。
【0095】
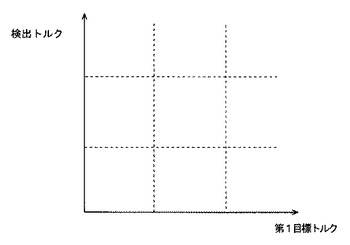
図5に戻って、学習部9040は、検出トルクと算出トルクとの誤差eに応じた補正量を、エンジン1000の運転状態毎に学習(記憶)する。たとえば、図8に示すように、第1目標トルクならびに検出トルクをパラメータとして区分される領域毎に、検出トルクと算出トルクとの誤差eに応じた補正量が学習される。
【0096】
なお、図8における破線は、補正量が学習される領域の境界を示す。第1目標トルクおよび検出トルクの代わりにもしくは加えて、エンジン回転数NEおよび負荷をパラメータとして用いるようにしてもよい。
【0097】
第2算出部9032は、エンジン1000の運転状態毎に学習された補正量を用いて、第1先読みトルクおよび第2先読みトルクを算出する。すなわち、PID制御により定められる補正量に、エンジン1000の運転状態毎に学習された補正量が加算される。
【0098】
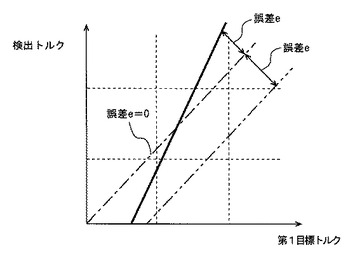
これにより、図9において実線で示すように、検出トルクと算出トルクとの誤差eがエンジン1000の運転状態に応じて変化するために、検出トルクと算出トルクとの誤差eに応じた補正量が変化する場合であっても、第1目標トルクおよび第2目標トルクを速やかに補正することができる。そのため、エンジン1000における無駄時間が除かれた第1先読みトルクおよび第2先読みトルクを、第1目標トルクおよび第2目標トルクから速やかに算出することができる。その結果、検出トルクと算出トルクとの誤差eに応じた補正量を算出するために生じ得る遅れを短くすることができる。
【0099】
なお、図9における一点鎖線は、検出トルクと算出トルクとの誤差eが零になる理想的な状態を示す。図9における破線との距離が、誤差eの大きさを示す。図9における二点鎖線は、検出トルクと算出トルクとの誤差eが略一定になる状態を示す。検出トルクと算出トルクとの誤差eが略一定になる場合は、補正量を逐次更新する必要性が小さい。そのため、略全ての運転状態において同程度の補正量を用いることができる。この場合、補正量を学習せずとも、第1先読みトルクおよび第2先読みトルクを速やかに算出することができる。
【0100】
第3算出部9033は、図10に示すように、第2先読みトルクに対して、無駄時間から先読み時間を減算して得られる時間だけ遅れた出力トルクを算出する。言い換えると、実際の出力トルクに対して先読み時間分だけ早い出力トルクが算出される。これにより、検出トルクと同程度の精度を有する将来の出力トルクを、エンジン1000の実際の出力トルクよりも所望の時間だけ早く得ることができる。
【0101】
本実施の形態においては、第2先読みトルクに対して無駄時間から先読み時間を減算して得られる時間だけ遅れた出力トルクに基づいて、オートマチックトランスミッション2000の油圧が制御される。そのため、第1目標トルクに応じた実際の出力トルクが実現される時期と、第2先読みトルクを用いた制御が実現される時期とを精度よく一致させることができる。
【0102】
以上のように、本実施の形態に係る出力トルクの算出装置によれば、ドライバの操作、車両の挙動およびオートマチックトランスミッションの変速のための要求などに基づいてエンジンの目標トルクが設定される。目標トルクとエンジンの実際の出力トルクとの差が小さくなるようにエンジンが制御される。エンジンの運転状態にから、エンジンの実際の出力トルクを表わす検出トルクが算出される。さらに、エンジンの無駄時間を加味して、エンジンの実際の出力トルクを表わす算出トルクが第1目標トルクから算出されるとともに、検出トルクと算出トルクとの誤差eに応じて第1目標トルクをフィードバック補正することにより、エンジンにおける無駄時間が除かれた出力トルクを表わす先読みトルクが算出される。これにより、エンジンの運転状態から得られる検出トルクと同程度の精度を有する将来の出力トルクを、第1目標トルクに応じた出力トルクが実現される時期よりも無駄時間の分だけ早く得ることができる。そのため、エンジンの将来の出力トルクを精度よく算出することができる。
【0103】
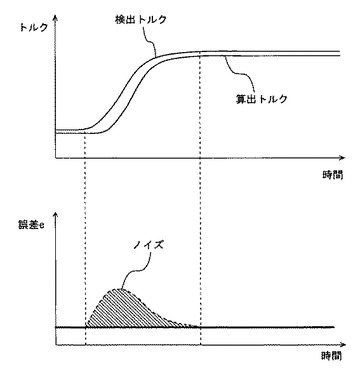
なお、図11に示すように、第2算出部9032において、検出トルクと算出トルクとの誤差eをローパスフィルタLPFに通すようにしてもよい。このようにすれば、図12に示すように、検出トルクと算出トルクとの誤差eに含まれるノイズを除去することができる。
【0104】
今回開示された実施の形態は、すべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上記した説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。
【図面の簡単な説明】
【0105】
【図1】車両のパワートレーンを示す概略構成図である。
【図2】オートマチックトランスミッションのプラネタリギヤユニットを示すスケルトン図である。
【図3】オートマチックトランスミッションの作動表を示す図である。
【図4】オートマチックトランスミッションの油圧回路を示す図である。
【図5】ECUの機能ブロック図(その1)である。
【図6】第1目標トルク、検出トルクおよび第1先読みトルクを示す図である。
【図7】第2目標トルク、検出トルクおよび第2先読みトルクを示す図である。
【図8】補正量が学習される領域を示す図である。
【図9】検出トルクと算出トルクとの誤差eを示す図である。
【図10】第2先読みトルクに対して、無駄時間から先読み時間を減算して得られる時間だけ遅れた出力トルクを示す図である。
【図11】ECUの機能ブロック図(その2)である。
【図12】ノイズが除去された検出トルクと算出トルクとの誤差eを示す図である。
【符号の説明】
【0106】
1000 エンジン、2000 オートマチックトランスミッション、2100 トルクコンバータ、3000 プラネタリギヤユニット、4000 油圧回路、4004 オイルポンプ、4006 プライマリレギュレータバルブ、4010 ライン圧油路、4100 マニュアルバルブ、4102 Dレンジ圧油路、4104 Rレンジ圧油路、4105 ドレンポート、4200 ソレノイドモジュレータバルブ、4210 SL1リニアソレノイド、4220 SL2リニアソレノイド、4230 SL3リニアソレノイド、4240 SL4リニアソレノイド、4250 SL5リニアソレノイド、4300 SLTリニアソレノイド、4302 SLT油路、4500 B2コントロールバルブ、5000 プロペラシャフト、6000 デファレンシャルギヤ、7000 後輪、8000 ECU、8002 ROM、8004 シフトレバー、8006 ポジションスイッチ、8008 アクセルペダル、8010 アクセル開度センサ、8012 エアフローメータ、8016 電子スロットルバルブ、8018 スロットル開度センサ、8020 エンジン回転数センサ、8022 入力軸回転数センサ、8024 出力軸回転数センサ、8026 油温センサ、8028 水温センサ、9000 設定部、9010 制御部、9020 検出部、9031 第1算出部、9032 第2算出部、9033 第3算出部、9040 学習部。
【技術分野】
【0001】
本発明は、出力トルクの算出装置に関し、特に、駆動源における無駄時間が除かれた出力トルクを算出する技術に関する。
【背景技術】
【0002】
従来より、自動的に変速を行なう自動変速機が知られている。自動変速機は、たとえば複数の摩擦係合要素のうちの、係合する摩擦係合要素の組合せに応じたギヤを形成する。摩擦係合要素の係合力は、摩擦係合要素に供給される油圧に応じて定まる。すなわち、自動変速機は油圧により作動する。油圧は、たとえばエンジンにより駆動されるオイルポンプにより発生される。
【0003】
燃費を向上するためには、オイルポンプの負荷をできるだけ小さくすることが望ましい。オイルポンプの負荷を小さくするためには、摩擦係合要素に供給される油圧を低くすればよい。しかしながら、摩擦係合要素の供給される油圧が低すぎると、摩擦係合要素が滑り得る。したがって、自動変速機の入力トルク、すなわちエンジンの出力トルクを正確に把握し、エンジンの出力トルクに対して過不足のない油圧を実現することが望ましい。
【0004】
特開2006−46177号公報(特許文献1)は、エンジンの回転数および各気筒の点火時期に基づいて、第1のエンジントルクを算出するステップと、各気筒の点火時期の変動量に基づいて、第1のエンジントルクをなまし処理することにより自動変速機の制御に用いられる第2のエンジントルクを算出するステップとを含む、エンジンのトルク算出方法を開示する。
【0005】
この公報に記載のトルク算出方法によれば、エンジンの回転数に基づいて、第1のエンジントルク(実エンジン図示トルク)が算出される。たとえば、実エンジン図示トルクを繰返し算出し、前回算出された実エンジン図示トルクおよび今回算出された実エンジン図示トルクの差に基づいて算出された加算値を、前回算出された実エンジン図示トルクに加算するなまし処理により、第2のエンジントルク(実エンジン正味トルク)が算出される。点火時期の変動量が大きい場合は、小さい場合に比べて、加算値は抑制される。これにより、実エンジン図示トルクの変動量が大きい場合であっても、なまし処理により、滑らかに変動する実エンジン正味トルクを算出することができる。そのため、実エンジン正味トルクの急変を抑制することができる。その結果、自動変速機の制御に好ましいトルクを算出することができる。
【特許文献1】特開2006−46177号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
自動変速機の制御に用いられる油圧を所望の油圧に調圧するには、ある程度時間が必要である。したがって、エンジンの運転状態に基づいて得られた出力トルクに対して過不足のない油圧を即座に得られるとは限らない。油圧を調圧している間に出力トルクが変化した場合、油圧が目標値に達しても、その時の出力トルクに対して油圧が過剰であったり不足したりし得る。よって、エンジンの出力トルクと自動変速機の制御に用いられる油圧とを精度よく対応させるためには、将来の出力トルクを予め把握しておき、将来の出力トルクに対して過不足が無いように油圧を前もって調圧することが望ましい。しかしながら、特開2006−46177号公報に記載のトルク算出方法により算出される実エンジン正味トルクは、実時間におけるエンジンの運転状態に基づいた出力トルクであるため、将来の出力トルクではない。
【0007】
本発明は、上述の課題を解決するためになされたものであって、その目的は、駆動源の将来の出力トルクを精度よく算出することができる出力トルクの算出装置を提供することである。
【課題を解決するための手段】
【0008】
第1の発明に係る出力トルクの算出装置は、駆動源の目標トルクを設定するための設定手段と、駆動源の運転状態を検出するための検出手段と、駆動源の運転状態に応じて駆動源の第1の出力トルクを算出するための第1の算出手段と、駆動源における無駄時間が加味された駆動源の第2の出力トルクを目標トルクから算出するとともに、第1の出力トルクと第2の出力トルクとの差に応じて目標トルクを補正することにより、駆動源における無駄時間が除かれた駆動源の第3の出力トルクを目標トルクから算出するための第2の算出手段とを備える。
【0009】
この構成によると、駆動源の目標トルクが設定される。駆動源の実際の出力トルクは、目標トルクに対して1次遅れおよび無駄時間などの分だけ遅れて実現される。また、駆動源の実際の出力トルクは、外乱(たとえば摩擦抵抗の変化)などの影響を受けて、目標トルクとは異なり得る。駆動源の実際の出力トルクを得るために、駆動源の運転状態に応じて駆動源の第1の出力トルクが算出される。これにより、駆動源の実際の運転状態に応じて、駆動源の実際の出力トルクを表わす第1の出力トルクを精度よく得ることができる。第1の出力トルクとは別に、駆動源における無駄時間が加味された駆動源の第2の出力トルクが目標トルクから算出される。これにより、駆動源の実際の出力トルクを表わす第2の出力トルクを演算により得ることができる。第1の出力トルクと第2の出力トルクとの差、すなわち、目標トルクから第2の出力トルクを算出するために用いられる演算において生じる誤差に応じて目標トルクを補正することにより、駆動源における無駄時間が除かれた駆動源の第3の出力トルクが目標トルクから算出される。これにより、駆動源の運転状態に基づいて得られる第1の出力トルクと同程度の精度を有する将来の出力トルクを、駆動源の実際の出力トルクよりも無駄時間の分だけ早く得ることができる。そのため、駆動源の将来の出力トルクを精度よく算出することができる出力トルクの算出装置を提供することができる。
【0010】
第2の発明に係る出力トルクの算出装置においては、第1の発明の構成に加え、設定手段は、複数の種類のトルクを考慮して第1の目標トルクを設定するための手段と、複数の種類のトルクのうちの少なくともいずれか一つのトルクが除かれた第2の目標トルクを設定するための手段とを含む。第2の算出手段は、駆動源における無駄時間が加味された駆動源の第2の出力トルクを第1の目標トルクから算出するとともに、第1の出力トルクと第2の出力トルクとの差に応じて第2の目標トルクを補正することにより、駆動源における無駄時間が除かれた駆動源の第3の出力トルクを第2の目標トルクから算出するための手段を含む。
【0011】
この構成によると、複数の種類のトルクを考慮した第1の目標トルクを用いて算出された、第1の出力トルクと第2の出力トルクとの差に応じて、第3の出力トルクが、複数の種類のトルクのうちの少なくともいずれか一つのトルクが除かれた第2の目標トルクから算出される。これにより、複数の種類のトルクのうちのいずれかのトルクが除かれた第2の目標トルクが実現されることが無くても、駆動源の運転状態から得られる第1の出力トルクと同程度の精度を有する出力トルクを、駆動源の実際の出力トルクよりも無駄時間の分だけ早く得ることができる。そのため、たとえば変速時のショックを低減するために過渡的に要求されるトルクなどの、自動変速機の油圧の制御に対しては必要のないトルクが除かれた目標トルクから、自動変速機の油圧の制御に用いるべき出力トルクを無駄時間分だけ早く得ることができる。その結果、自動変速機の油圧の制御に対しては必要のないトルクが除かれた出力トルクを用いて、自動変速機を安定的に制御することができる。
【0012】
第3の発明に係る出力トルクの算出装置は、第1または2の発明の構成に加え、第3の出力トルクに対して予め定められた時間だけ遅れた出力トルクを算出するための手段をさらに備える。
【0013】
この構成によると、駆動源の実際の出力トルクよりも無駄時間の分だけ早く得られた将来の出力トルクに対して、予め定められた時間だけ遅れた出力トルクが算出される。これにより、将来の出力トルクを駆動源の実際の出力トルクよりも所望の時間だけ早く得ることができる。そのため、目標トルクに対応するトルクが実現される時期と、将来の出力トルクを用いた制御が実現される時期とを精度よく一致させることができる。
【0014】
第4の発明に係る出力トルクの算出装置は、第1〜3のいずれかの発明の構成に加え、第1の出力トルクと第2の出力トルクとの差に応じた補正量を、駆動源の運転状態毎に学習するための手段をさらに備える。第2の算出手段は、学習された補正量を用いて第3の出力トルクを算出するための手段を含む。
【0015】
この構成によると、第1の出力トルクと第2の出力トルクとの差に応じた補正量が、駆動源の運転状態毎に学習される。学習された補正量に応じて目標トルクを補正することにより、駆動源における無駄時間が除かれた駆動源の第3の出力トルクが目標トルクから算出される。これにより、駆動源の実際の運転状態から算出される第1の出力トルクと目標トルクから算出される第2の出力トルクとの差に応じた補正量が、駆動源の運転状態に応じて変化する場合であっても、駆動源における無駄時間が除かれた第3の出力トルクを目標トルクから速やかに算出することができる。そのため、第1の出力トルクと第2の出力トルクとの差に応じた補正量を算出するために生じ得る遅れを短くすることができる。
【0016】
第5の発明に係る出力トルクの算出装置においては、第1〜4のいずれかの発明の構成に加え、駆動源は内燃機関である。検出手段は、内燃機関に吸入される空気量を検出するための手段を含む。第1の算出手段は、検出された空気量に応じて内燃機関の第1の出力トルクを算出するための手段を含む。
【0017】
この構成によると、内燃機関に吸入される空気量から、内燃機関の実際の出力トルクを表わす第1の出力トルクを精度よく算出することができる。
【発明を実施するための最良の形態】
【0018】
以下、図面を参照しつつ、本発明の実施の形態について説明する。以下の説明では、同一の部品には同一の符号を付してある。それらの名称および機能も同一である。したがって、それらについての詳細な説明は繰返さない。
【0019】
図1を参照して、本発明の実施の形態に係る制御装置を有する車両について説明する。この車両は、FR(Front engine Rear drive)車両である。なお、FR以外の車両であってもよい。
【0020】
車両は、エンジン1000と、オートマチックトランスミッション2000と、トルクコンバータ2100と、オートマチックトランスミッション2000の一部を構成するプラネタリギヤユニット3000と、オートマチックトランスミッション2000の一部を構成する油圧回路4000と、プロペラシャフト5000と、デファレンシャルギヤ6000と、後輪7000と、ECU(Electronic Control Unit)8000とを含む。
【0021】
エンジン1000は、インジェクタ(図示せず)から噴射された燃料と空気との混合気を、シリンダの燃焼室内で燃焼させる内燃機関である。燃焼によりシリンダ内のピストンが押し下げられて、クランクシャフトが回転させられる。エンジン1000により、オルタネータおよびエアコンディショナーなどの補機1004が駆動される。エンジン1000の出力トルク(エンジントルクTE)は、電子スロットルバルブ8016の作動量、すなわちスロットル開度などに応じて変化する。なお、エンジン1000の代わりにもしくは加えて、動力源にモータを用いるようにしてもよい。また、ディーゼルエンジンを用いるようにしてもよい。ディーゼルエンジンにおいては、インジェクタの開弁時間(作動量)、すなわち燃料噴射量に応じて出力トルクが変化する。
【0022】
オートマチックトランスミッション2000は、トルクコンバータ2100を介してエンジン1000に連結される。オートマチックトランスミッション2000は、所望のギヤ段を形成することにより、クランクシャフトの回転数を所望の回転数に変速する。なお、ギヤ段を形成するオートマチックトランスミッションの代わりに、ギヤ比を無段階に変更するCVT(Continuously Variable Transmission)を搭載するようにしてもよい。さらに、油圧アクチュエータもしくは電動モータにより変速される常時噛合式歯車からなる自動変速機を搭載するようにしてもよい。
【0023】
オートマチックトランスミッション2000から出力されたトルクは、プロペラシャフト5000およびデファレンシャルギヤ6000を介して、左右の後輪7000に伝達される。
【0024】
ECU8000には、シフトレバー8004のポジションスイッチ8006と、アクセルペダル8008のアクセル開度センサ8010と、エアフローメータ8012と、電子スロットルバルブ8016のスロットル開度センサ8018と、エンジン回転数センサ8020と、入力軸回転数センサ8022と、出力軸回転数センサ8024と、油温センサ8026と、水温センサ8028とがハーネスなどを介して接続されている。
【0025】
シフトレバー8004の位置(シフトポジション)は、ポジションスイッチ8006により検出され、検出結果を表す信号がECU8000に送信される。シフトレバー8004の位置に対応して、オートマチックトランスミッション2000のギヤ段が自動で形成される。また、運転者の操作に応じて、運転者が任意のギヤ段を選択できるマニュアルシフトモードを選択できるように構成してもよい。
【0026】
アクセル開度センサ8010は、アクセルペダル8008の開度を検出し、検出結果を表す信号をECU8000に送信する。エアフローメータ8012は、エンジン1000に吸入される空気量を検出し、検出結果を表す信号をECU8000に送信する。
【0027】
スロットル開度センサ8018は、アクチュエータにより開度が調整される電子スロットルバルブ8016の開度を検出し、検出結果を表す信号をECU8000に送信する。電子スロットルバルブ8016により、エンジン1000に吸入される空気量が調整される。
【0028】
なお、電子スロットルバルブ8016の代わりにもしくは加えて、吸気バルブ(図示せず)や排気バルブ(図示せず)のリフト量や開閉する位相を変更する可変バルブリフトシステムにより、エンジン1000に吸入される空気量を調整するようにしてもよい。
【0029】
エンジン回転数センサ8020は、エンジン1000の出力軸(クランクシャフト)の回転数(以下、エンジン回転数NEとも記載する)を検出し、検出結果を表す信号をECU8000に送信する。入力軸回転数センサ8022は、オートマチックトランスミッション2000の入力軸回転数NI(トルクコンバータ2100のタービン回転数NT)を検出し、検出結果を表す信号をECU8000に送信する。出力軸回転数センサ8024は、オートマチックトランスミッション2000の出力軸回転数NOを検出し、検出結果を表す信号をECU8000に送信する。
【0030】
油温センサ8026は、オートマチックトランスミッション2000の作動や潤滑に用いられるオイル(ATF:Automatic Transmission Fluid)の温度(油温)を検出し、検出結果を表す信号をECU8000に送信する。
【0031】
水温センサ8028は、エンジン1000の冷却水の温度(水温)を検出し、検出結果を表わす信号をECU8000に送信する。
【0032】
ECU8000は、ポジションスイッチ8006、アクセル開度センサ8010、エアフローメータ8012、スロットル開度センサ8018、エンジン回転数センサ8020、入力軸回転数センサ8022、出力軸回転数センサ8024、油温センサ8026、水温センサ8028などから送られてきた信号、ROM(Read Only Memory)8002に記憶されたマップおよびプログラムに基づいて、車両が所望の走行状態となるように、機器類を制御する。
【0033】
本実施の形態においては、ドライバの操作(アクセル開度、車速)、車両の挙動およびオートマチックトランスミッション2000の変速のための要求などに基づいてエンジンの目標トルクが設定される。より具体的には、ドライバの操作および車両の挙動などに基づいて車両の駆動力が設定され、オートマチックトランスミッション2000のギヤ比などを考慮して駆動力がトルクに変換される。得られたトルクに、オートマチックトランスミッション2000の変速のための要求などに基づくトルクが加味されて、目標トルクが設定される。目標トルクを実現するように、エンジン1000が制御される。
【0034】
オートマチックトランスミッション2000の油圧制御は、エンジン1000の出力トルクに基づいて実行される。なお、エンジン1000およびオートマチックトランスミッション2000の制御方法はこれに限らない。また、ECU8000により実行されるプログラムをCD(Compact Disc)、DVD(Digital Versatile Disc)などの記録媒体に記録して市場に流通させてもよい。また、ECU8000を複数のECUに分割するようにしてもよい。
【0035】
本実施の形態において、ECU8000は、シフトレバー8004がD(ドライブ)ポジションであることにより、オートマチックトランスミッション2000のシフトレンジにD(ドライブ)レンジが選択された場合、前進1速〜8速ギヤ段のうちのいずれかのギヤ段が形成されるように、オートマチックトランスミッション2000を制御する。オートマチックトランスミッション2000の入力軸と出力軸とを連結するように、後述する摩擦係合要素(クラッチおよびブレーキ)が予め定められた組合せで係合されることにより、ギヤ段が形成される。前進1速〜8速ギヤ段のうちのいずれかのギヤ段が形成されると、後輪7000にトルクが伝達され得る。なおDレンジにおいて、8速ギヤ段よりも高速のギヤ段を形成可能であるようにしてもよい。形成するギヤ段は、車速とアクセル開度とをパラメータとして実験等により予め作成された変速線図に基づいて決定される。
【0036】
シフトレバー8004がN(ニュートラル)ポジションもしくはP(パーキング)ポジションであることにより、オートマチックトランスミッション2000のシフトレンジにN(ニュートラル)レンジもしくはP(パーキング)レンジが選択された場合、摩擦係合要素が解放され、オートマチックトランスミッション2000はニュートラル状態になる。ニュートラル状態では、オートマチックトランスミッション2000の入力軸と出力軸とが遮断される。
【0037】
図2を参照して、プラネタリギヤユニット3000について説明する。プラネタリギヤユニット3000は、クランクシャフトに連結された入力軸2102を有するトルクコンバータ2100に接続されている。
【0038】
プラネタリギヤユニット3000は、フロントプラネタリ3100と、リアプラネタリ3200と、C1クラッチ3301と、C2クラッチ3302と、C3クラッチ3303と、C4クラッチ3304と、B1ブレーキ3311と、B2ブレーキ3312と、ワンウェイクラッチ(F)3320とを含む。
【0039】
フロントプラネタリ3100は、ダブルピニオン型の遊星歯車機構である。フロントプラネタリ3100は、第1サンギヤ(S1)3102と、1対の第1ピニオンギヤ(P1)3104と、キャリア(CA)3106と、リングギヤ(R)3108とを含む。
【0040】
第1ピニオンギヤ(P1)3104は、第1サンギヤ(S1)3102および第1リングギヤ(R)3108と噛合っている。第1キャリア(CA)3106は、第1ピニオンギヤ(P1)3104が公転および自転可能であるように支持している。
【0041】
第1サンギヤ(S1)3102は、回転不能であるようにギヤケース3400に固定される。第1キャリア(CA)3106は、プラネタリギヤユニット3000の入力軸3002に連結される。
【0042】
リアプラネタリ3200は、ラビニヨ型の遊星歯車機構である。リアプラネタリ3200は、第2サンギヤ(S2)3202と、第2ピニオンギヤ(P2)3204と、リアキャリア(RCA)3206と、リアリングギヤ(RR)3208と、第3サンギヤ(S3)3210と、第3ピニオンギヤ(P3)3212とを含む。
【0043】
第2ピニオンギヤ(P2)3204は、第2サンギヤ(S2)3202、リアリングギヤ(RR)3208および第3ピニオンギヤ(P3)3212と噛合っている。第3ピニオンギヤ(P3)3212は、第2ピニオンギヤ(P2)3204に加えて、第3サンギ
ヤ(S3)3210と噛合っている。
【0044】
リアキャリア(RCA)3206は、第2ピニオンギヤ(P2)3204および第3ピニオンギヤ(P3)3212が公転および自転可能であるように支持している。リアキャリア(RCA)3206は、ワンウェイクラッチ(F)3320に連結される。リアキャリア(RCA)3206は、1速ギヤ段の駆動時(エンジン1000から出力された駆動力を用いた走行時)に回転不能となる。リアリングギヤ(RR)3208は、プラネタリギヤユニット3000の出力軸3004に連結される。
【0045】
ワンウェイクラッチ(F)3320は、B2ブレーキ3312と並列に設けられる。すなわち、ワンウェイクラッチ(F)3320のアウターレースはギヤケース3400に固定され、インナーレースはリアキャリア(RCA)3206に連結される。
【0046】
図3に、各変速ギヤ段と、各クラッチおよび各ブレーキの作動状態との関係を表した作動表を示す。この作動表に示された組み合わせで各ブレーキおよび各クラッチを作動させることにより、前進1速〜8速のギヤ段と、後進1速および2速のギヤ段が形成される。
【0047】
図4を参照して、油圧回路4000の要部について説明する。なお、油圧回路4000は、以下に説明するものに限られない。
【0048】
油圧回路4000は、オイルポンプ4004と、プライマリレギュレータバルブ4006と、マニュアルバルブ4100と、ソレノイドモジュレータバルブ4200と、SL1リニアソレノイド(以下、SL(1)と記載する)4210と、SL2リニアソレノイド(以下、SL(2)と記載する)4220と、SL3リニアソレノイド(以下、SL(3)と記載する)4230と、SL4リニアソレノイド(以下、SL(4)と記載する)4240と、SL5リニアソレノイド(以下、SL(5)と記載する)4250と、SLTリニアソレノイド(以下、SLTと記載する)4300と、B2コントロールバルブ4500とを含む。
【0049】
オイルポンプ4004は、エンジン1000のクランクシャフトに連結されている。クランクシャフトが回転することにより、オイルポンプ4004が駆動し、油圧を発生する。オイルポンプ4004で発生した油圧は、プライマリレギュレータバルブ4006により調圧され、ライン圧が生成される。
【0050】
プライマリレギュレータバルブ4006は、SLT4300により調圧されたスロットル圧をパイロット圧として作動する。ライン圧は、ライン圧油路4010を介してマニュアルバルブ4100に供給される。
【0051】
マニュアルバルブ4100は、ドレンポート4105を含む。ドレンポート4105から、Dレンジ圧油路4102およびRレンジ圧油路4104の油圧が排出される。マニュアルバルブ4100のスプールがDポジションにある場合、ライン圧油路4010とDレンジ圧油路4102とが連通させられ、Dレンジ圧油路4102に油圧が供給される。このとき、Rレンジ圧油路4104とドレンポート4105とが連通させられ、Rレンジ圧油路4104のRレンジ圧がドレンポート4105から排出される。
【0052】
マニュアルバルブ4100のスプールがRポジションにある場合、ライン圧油路4010とRレンジ圧油路4104とが連通させられ、Rレンジ圧油路4104に油圧が供給される。このとき、Dレンジ圧油路4102とドレンポート4105とが連通させられ、Dレンジ圧油路4102のDレンジ圧がドレンポート4105から排出される。
【0053】
マニュアルバルブ4100のスプールがNポジションもしくはPポジションにある場合、Dレンジ圧油路4102およびRレンジ圧油路4104の両方と、ドレンポート4105とが連通させられ、Dレンジ圧油路4102のDレンジ圧およびRレンジ圧油路4104のRレンジ圧がドレンポート4105から排出される。
【0054】
Dレンジ圧油路4102に供給された油圧は、最終的には、C1クラッチ3301、C2クラッチ3302およびC3クラッチ3303に供給される。Rレンジ圧油路4104に供給された油圧は、最終的には、B2ブレーキ3312に供給される。
【0055】
ソレノイドモジュレータバルブ4200は、ライン圧を元圧とし、SLT4300に供給する油圧(ソレノイドモジュレータ圧)を一定の圧力に調圧する。
【0056】
SL(1)4210は、C1クラッチ3301に供給される油圧を調圧する。SL(2)4220は、C2クラッチ3302に供給される油圧を調圧する。SL(3)4230は、C3クラッチ3303に供給される油圧を調圧する。SL(4)4240は、C4クラッチ3304に供給される油圧を調圧する。SL(5)4250は、B1ブレーキ3311に供給される油圧を調圧する。
【0057】
SLT4300は、アクセル開度センサ8010により検出されたアクセル開度に基づいたECU8000からの制御信号に応じて、ソレノイドモジュレータ圧を調圧し、スロットル圧を生成する。スロットル圧は、SLT油路4302を介して、プライマリレギュレータバルブ4006に供給される。スロットル圧は、プライマリレギュレータバルブ4006のパイロット圧として利用される。
【0058】
SL(1)4210、SL(2)4220、SL(3)4230、SL(4)4240、SL(5)4250およびSLT4300は、ECU8000から送信される制御信号により制御される。
【0059】
B2コントロールバルブ4500は、Dレンジ圧油路4102およびRレンジ圧油路4104のいずれか一方からの油圧を選択的に、B2ブレーキ3312に供給する。B2コントロールバルブ4500に、Dレンジ圧油路4102およびRレンジ圧油路4104が接続されている。B2コントロールバルブ4500は、SLUソレノイドバルブ(図示せず)から供給された油圧とスプリングの付勢力とにより制御される。
【0060】
SLUソレノイドバルブがオンの場合、B2コントロールバルブ4500は、図4において左側の状態となる。この場合、B2ブレーキ3312には、SLUソレノイドバルブから供給された油圧をパイロット圧として、Dレンジ圧を調圧した油圧が供給される。
【0061】
SLUソレノイドバルブがオフの場合、B2コントロールバルブ4500は、図4において右側の状態となる。この場合、B2ブレーキ3312には、Rレンジ圧が供給される。
【0062】
図5を参照して、ECU8000についてさらに説明する。なお、以下に説明するECU8000の各機能は、ハードウエアにより実現するようにしてもよく、ソフトウエアにより実現するようにしてもよい。
【0063】
ECU8000は、設定部9000と、制御部9010と、検出部9020と、第1算出部9031と、第2算出部9032と、第3算出部9033と、学習部9040とを備える。
【0064】
設定部9000は、ドライバの操作、車両の挙動およびオートマチックトランスミッション2000の変速のための要求などに基づいてエンジン1000の第1目標トルクを設定する。
【0065】
たとえば、実験およびシミュレーションの結果などに基づいて予め定められたマップに従って、アクセル開度および車速などから、ドライバの操作に基づいた出力トルクが設定される。
【0066】
また、VDIM(Vehicle Dynamics Integrated Management)、制振制御、クルーズコントロールなどによりエンジン1000の出力トルクが設定される。
【0067】
VDIMは、VSC(Vehicle Stability Control)、TRC(TRaction Control)、ABS(Anti lock Brake System)、EPS(Electric Power Steering)などを統合するシステムであって、アクセル、ステアリング、ブレーキの操作量によるドライバの走行イメージと、各種センサ情報による車両挙動との差を算出し、その差を縮めるように車両の駆動力(エンジン1000の出力トルク)、ブレーキ油圧などを制御する。
【0068】
VSCは、前後輪が横滑りしそうな状態をセンサが検出した場合において、各輪のブレーキ油圧および車両の駆動力(エンジン1000の出力トルク)などを自動的に設定し、車両の安定性を確保する制御である。
【0069】
TRCは、滑りやすい路面での発進時および加速時に、駆動輪の空転をセンサが感知すると、各輪のブレーキ油圧および車両の駆動力(エンジン1000の出力トルク)などを自動的に設定し、最適な駆動力を確保する制御である。
【0070】
ABSは、ブレーキ油圧の最適値を自動的に設定し、車輪のロックを防止する制御システムである。EPSは、電動モータの力によってステアリングホイールの操舵をアシストする制御システムである。
【0071】
制振制御は、車両の実際の駆動力などから、車両モデルを用いて算出される車両のピッチングおよびバウンシングを抑制するための駆動力(エンジン1000の出力トルク)を設定する制御である。車両のピッチングおよびバウンシングを抑制するための駆動力を設定する方法については、従来の技術を利用すればよいため、ここではその詳細な説明は繰り返さない。
【0072】
クルーズコントールは、車速を予め定められた車速に維持するための駆動力(エンジン1000の出力トルク)を設定する制御である。
【0073】
さらに、オートマチックトランスミッション2000の変速時に発生し得るショックなどを低減するためのトルクダウンもしくはトルクアップを実現し得るような出力トルクが設定される。
【0074】
ECU8000は、これらの出力トルクを調停したり、加減算したりすることにより、最終的なエンジン1000の第1目標トルクを設定する。たとえば、ドライバの操作に基づいた出力トルクおよび車両の挙動に基づいたトルクのうちの最も小さい出力トルクもしくは最も大きい出力トルクが選択される。選択された出力トルクに対して、オートマチックトランスミッション2000の変速のための要求に基づく出力トルクを加算もしくは減算することにより、エンジン1000の目標トルクが設定される。なお、第1目標トルクの設定方法はこれに限らない。
【0075】
また、ECU8000は、ドライバの操作、車両の挙動およびオートマチックトランスミッション2000の変速のための要求などに基づく出力トルクのうちの、少なくともいずれか一つの出力トルクが除かれた第2目標トルクを設定する。
【0076】
たとえば、オートマチックトランスミッション2000の変速のための要求に基づく出力トルクが除かれた第2目標トルクが設定される。すなわち、ドライバの操作および車両の挙動に基づいて第2目標トルクが設定される。
【0077】
ドライバの操作に基づいた出力トルクおよび車両の挙動に基づいたトルクのうちの最も小さい出力トルクもしくは最も大きい出力トルクが、第2目標トルクとして設定される。なお、第2目標トルクの設定方法はこれに限らない。ドライバの操作または車両の挙動に基づく出力トルクを除いて第2目標トルクが設定するようにしてもよい。
【0078】
制御部9010は、第1目標トルクとエンジン1000の実際の出力トルクとの差が小さくなるようにエンジン1000を制御する。より具体的には、第1目標トルクとエンジン1000の実際の出力トルクとの差が小さくなるように、すなわち、エンジン1000の実際の出力トルクが第1目標トルクに一致するように、スロットル開度、点火時期、燃料噴射量などが制御される。
【0079】
検出部9020は、エンジン1000の運転状態を検出する。検出される運転状態には、エンジン1000に吸入される空気量(吸気量)、エンジン回転数NEなどが含まれる。
【0080】
第1算出部9031は、エンジン1000の運転状態に応じてエンジン1000の実際の出力トルクを算出(推定)する。たとえば、吸気量およびエンジン回転数などをパラメータとして有するマップに従って、エンジン1000の実際の出力トルクが算出される。
【0081】
なお、吸気量の代わりに吸気管内の圧力を用いてもよい。また、トルクセンサによりエンジン1000の出力トルクを直接検出するようにしてもよい。エンジン1000の運転状態に応じてエンジン1000の実際の出力トルクを算出する方法については、周知の一般的な技術を利用すればよいため、ここではさらなる詳細な説明は繰り返さない。
【0082】
以下、検出された運転状態に基づいて算出されるエンジン1000の出力トルクを検出トルクとも記載する。エンジン1000の検出トルクには、エンジン1000の制御上の一次遅れならびに無駄時間が反映される。
【0083】
第2算出部9032は、エンジン1000の制御上の一次遅れならびに無駄時間が加味された、エンジン1000の実際の出力トルクを、第1目標トルクから算出する。以下、第1目標トルクから算出されるエンジン1000の出力トルクを算出トルクとも記載する。
【0084】
算出トルクは、たとえばエンジン回転数NEなどの運転状態ならびに第1目標トルクをパラメータとして有するマップなどに従って、エンジン1000の制御上の一次遅れならびに無駄時間を反映するように算出される。
【0085】
また、第2算出部9032は、検出トルクと算出トルクとの誤差eに応じて第1目標トルクをフィードバック補正することにより、エンジン1000における無駄時間が除かれた、エンジン1000の出力トルクを第1目標トルクから算出する。以下、第1目標トルクから算出される、エンジン1000における無駄時間が除かれたエンジン1000の出力トルクを第1先読みトルクとも記載する。
【0086】
第1目標トルクの補正量は、PID(Proportion Integration Differential)制御により定められる。すなわち、検出トルクと算出トルクとの誤差eが小さくなるように、PID制御により第1目標トルクの補正量が定められる。たとえば、検出トルクと算出トルクとの誤差e、誤差eの微分値および誤差eの積分値が大きいほどより大きくなるように補正量が定められる。なお、補正量を定める方法はこれに限らない。
【0087】
検出トルクと算出トルクとの誤差eに応じた補正量を用いて第1目標トルクをフィードバック補正することにより、図6に示すように、エンジン1000の運転状態から得られる検出トルクと同程度の精度を有する将来の出力トルクを、第1目標トルクに応じたトルクが実現される時期よりも無駄時間の分だけ早く第1先読みトルクとして得ることができる。そのため、エンジン1000の将来の出力トルクを精度よく算出することができる。
【0088】
本実施の形態においては、第1先読みトルクを用いてエンジン1000以外の制御システム(たとえば、VSCおよびクルーズコントロール)が制御される。これにより、エンジン1000以外の制御システムにおける無駄時間の分だけ早めに制御システムを作動することができる。そのため、第1目標トルクに対応する出力トルクが実現される時期と、エンジン1000以外の制御システムにおける制御が実現される時期との差を小さくすることができる。その結果、エンジン1000の実際の出力トルクに応じて、精度よく制御システムを作動することができる。
【0089】
図5に戻って、さらに、第2算出部9032は、検出トルクと算出トルクとの誤差eに応じて第2目標トルクを補正することにより、エンジン1000における無駄時間が除かれた、エンジン1000の出力トルクを第2目標トルクから算出する。以下、第2目標トルクから算出される、エンジン1000における無駄時間が除かれたエンジン1000の出力トルクを第2先読みトルクとも記載する。第2先読みトルクには1次遅れが反映される。
【0090】
第2目標トルクの補正量は、第1目標トルクの補正量と同じである。すなわち、オートマチックトランスミッション2000の変速のための要求に基づく出力トルクを含む第1目標トルクを用いて算出される、検出トルクと算出トルクとの誤差eに応じて、オートマチックトランスミッション2000の変速のための要求に基づく出力トルクが除かれた第2目標トルクを補正することにより、第2先読みトルクが算出される。
【0091】
仮に第2目標トルクを実現するようにエンジン1000を制御した場合にエンジン1000の運転状態から得られる検出トルクと第2目標トルクから得られる算出トルクとの誤差は、第1目標トルクを実現するようにエンジン1000を制御した場合の検出トルクと第1目標トルクから得られる算出トルクとの誤差eと同程度と考えられるからである。
【0092】
これにより、第2目標トルクが実現されることが無くても、運転状態から得られる出力トルクと同程度の精度を有する出力トルクを、第2先読みトルクとしてエンジン1000の実際の出力トルクよりも無駄時間の分だけ早く得ることができる。
【0093】
本実施の形態においては、オートマチックトランスミッション2000の変速のための要求に基づく出力トルクが除かれた第2目標トルクから、第2先読みトルクが算出される。これにより、図7に示すように、変速時のショックを低減するために過渡的に要求されるトルクなどが除かれた第2目標トルクから、第2先読みトルクを無駄時間分だけ早く得ることができる。
【0094】
第2先読みトルクは、たとえばオートマチックトランスミッション2000の油圧回路4000におけるライン圧ならびに摩擦係合要素に供給する油圧を定めるために用いられる。すなわち、ライン圧ならびに摩擦係合要素に供給する油圧は、第2先読みトルクに応じて制御される。そのため、オートマチックトランスミッション2000の油圧の制御に対しては必要のないトルクが除かれた第2先読みトルクを用いて、オートマチックトランスミッション2000を安定的に制御することができる。
【0095】
図5に戻って、学習部9040は、検出トルクと算出トルクとの誤差eに応じた補正量を、エンジン1000の運転状態毎に学習(記憶)する。たとえば、図8に示すように、第1目標トルクならびに検出トルクをパラメータとして区分される領域毎に、検出トルクと算出トルクとの誤差eに応じた補正量が学習される。
【0096】
なお、図8における破線は、補正量が学習される領域の境界を示す。第1目標トルクおよび検出トルクの代わりにもしくは加えて、エンジン回転数NEおよび負荷をパラメータとして用いるようにしてもよい。
【0097】
第2算出部9032は、エンジン1000の運転状態毎に学習された補正量を用いて、第1先読みトルクおよび第2先読みトルクを算出する。すなわち、PID制御により定められる補正量に、エンジン1000の運転状態毎に学習された補正量が加算される。
【0098】
これにより、図9において実線で示すように、検出トルクと算出トルクとの誤差eがエンジン1000の運転状態に応じて変化するために、検出トルクと算出トルクとの誤差eに応じた補正量が変化する場合であっても、第1目標トルクおよび第2目標トルクを速やかに補正することができる。そのため、エンジン1000における無駄時間が除かれた第1先読みトルクおよび第2先読みトルクを、第1目標トルクおよび第2目標トルクから速やかに算出することができる。その結果、検出トルクと算出トルクとの誤差eに応じた補正量を算出するために生じ得る遅れを短くすることができる。
【0099】
なお、図9における一点鎖線は、検出トルクと算出トルクとの誤差eが零になる理想的な状態を示す。図9における破線との距離が、誤差eの大きさを示す。図9における二点鎖線は、検出トルクと算出トルクとの誤差eが略一定になる状態を示す。検出トルクと算出トルクとの誤差eが略一定になる場合は、補正量を逐次更新する必要性が小さい。そのため、略全ての運転状態において同程度の補正量を用いることができる。この場合、補正量を学習せずとも、第1先読みトルクおよび第2先読みトルクを速やかに算出することができる。
【0100】
第3算出部9033は、図10に示すように、第2先読みトルクに対して、無駄時間から先読み時間を減算して得られる時間だけ遅れた出力トルクを算出する。言い換えると、実際の出力トルクに対して先読み時間分だけ早い出力トルクが算出される。これにより、検出トルクと同程度の精度を有する将来の出力トルクを、エンジン1000の実際の出力トルクよりも所望の時間だけ早く得ることができる。
【0101】
本実施の形態においては、第2先読みトルクに対して無駄時間から先読み時間を減算して得られる時間だけ遅れた出力トルクに基づいて、オートマチックトランスミッション2000の油圧が制御される。そのため、第1目標トルクに応じた実際の出力トルクが実現される時期と、第2先読みトルクを用いた制御が実現される時期とを精度よく一致させることができる。
【0102】
以上のように、本実施の形態に係る出力トルクの算出装置によれば、ドライバの操作、車両の挙動およびオートマチックトランスミッションの変速のための要求などに基づいてエンジンの目標トルクが設定される。目標トルクとエンジンの実際の出力トルクとの差が小さくなるようにエンジンが制御される。エンジンの運転状態にから、エンジンの実際の出力トルクを表わす検出トルクが算出される。さらに、エンジンの無駄時間を加味して、エンジンの実際の出力トルクを表わす算出トルクが第1目標トルクから算出されるとともに、検出トルクと算出トルクとの誤差eに応じて第1目標トルクをフィードバック補正することにより、エンジンにおける無駄時間が除かれた出力トルクを表わす先読みトルクが算出される。これにより、エンジンの運転状態から得られる検出トルクと同程度の精度を有する将来の出力トルクを、第1目標トルクに応じた出力トルクが実現される時期よりも無駄時間の分だけ早く得ることができる。そのため、エンジンの将来の出力トルクを精度よく算出することができる。
【0103】
なお、図11に示すように、第2算出部9032において、検出トルクと算出トルクとの誤差eをローパスフィルタLPFに通すようにしてもよい。このようにすれば、図12に示すように、検出トルクと算出トルクとの誤差eに含まれるノイズを除去することができる。
【0104】
今回開示された実施の形態は、すべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上記した説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。
【図面の簡単な説明】
【0105】
【図1】車両のパワートレーンを示す概略構成図である。
【図2】オートマチックトランスミッションのプラネタリギヤユニットを示すスケルトン図である。
【図3】オートマチックトランスミッションの作動表を示す図である。
【図4】オートマチックトランスミッションの油圧回路を示す図である。
【図5】ECUの機能ブロック図(その1)である。
【図6】第1目標トルク、検出トルクおよび第1先読みトルクを示す図である。
【図7】第2目標トルク、検出トルクおよび第2先読みトルクを示す図である。
【図8】補正量が学習される領域を示す図である。
【図9】検出トルクと算出トルクとの誤差eを示す図である。
【図10】第2先読みトルクに対して、無駄時間から先読み時間を減算して得られる時間だけ遅れた出力トルクを示す図である。
【図11】ECUの機能ブロック図(その2)である。
【図12】ノイズが除去された検出トルクと算出トルクとの誤差eを示す図である。
【符号の説明】
【0106】
1000 エンジン、2000 オートマチックトランスミッション、2100 トルクコンバータ、3000 プラネタリギヤユニット、4000 油圧回路、4004 オイルポンプ、4006 プライマリレギュレータバルブ、4010 ライン圧油路、4100 マニュアルバルブ、4102 Dレンジ圧油路、4104 Rレンジ圧油路、4105 ドレンポート、4200 ソレノイドモジュレータバルブ、4210 SL1リニアソレノイド、4220 SL2リニアソレノイド、4230 SL3リニアソレノイド、4240 SL4リニアソレノイド、4250 SL5リニアソレノイド、4300 SLTリニアソレノイド、4302 SLT油路、4500 B2コントロールバルブ、5000 プロペラシャフト、6000 デファレンシャルギヤ、7000 後輪、8000 ECU、8002 ROM、8004 シフトレバー、8006 ポジションスイッチ、8008 アクセルペダル、8010 アクセル開度センサ、8012 エアフローメータ、8016 電子スロットルバルブ、8018 スロットル開度センサ、8020 エンジン回転数センサ、8022 入力軸回転数センサ、8024 出力軸回転数センサ、8026 油温センサ、8028 水温センサ、9000 設定部、9010 制御部、9020 検出部、9031 第1算出部、9032 第2算出部、9033 第3算出部、9040 学習部。
【特許請求の範囲】
【請求項1】
出力トルクの算出装置であって、
駆動源の目標トルクを設定するための設定手段と、
駆動源の運転状態を検出するための検出手段と、
前記駆動源の運転状態に応じて前記駆動源の第1の出力トルクを算出するための第1の算出手段と、
前記駆動源における無駄時間が加味された前記駆動源の第2の出力トルクを前記目標トルクから算出するとともに、前記第1の出力トルクと前記第2の出力トルクとの差に応じて前記目標トルクを補正することにより、前記駆動源における無駄時間が除かれた前記駆動源の第3の出力トルクを前記目標トルクから算出するための第2の算出手段とを備える、出力トルクの算出装置。
【請求項2】
前記設定手段は、
複数の種類のトルクを考慮して第1の目標トルクを設定するための手段と、
前記複数の種類のトルクのうちの少なくともいずれか一つのトルクが除かれた第2の目標トルクを設定するための手段とを含み、
前記第2の算出手段は、前記駆動源における無駄時間が加味された前記駆動源の前記第2の出力トルクを前記第1の目標トルクから算出するとともに、前記第1の出力トルクと前記第2の出力トルクとの差に応じて前記第2の目標トルクを補正することにより、前記駆動源における無駄時間が除かれた前記駆動源の前記第3の出力トルクを前記第2の目標トルクから算出するための手段を含む、請求項1に記載の出力トルクの算出装置。
【請求項3】
前記第3の出力トルクに対して予め定められた時間だけ遅れた出力トルクを算出するための手段をさらに備える、請求項1または2に記載の出力トルクの算出装置。
【請求項4】
前記第1の出力トルクと前記第2の出力トルクとの差に応じた補正量を、前記駆動源の運転状態毎に学習するための手段をさらに備え、
前記第2の算出手段は、学習された補正量を用いて前記第3の出力トルクを算出するための手段を含む、請求項1〜3のいずれかに記載の出力トルクの算出装置。
【請求項5】
前記駆動源は内燃機関であって、
前記検出手段は、前記内燃機関に吸入される空気量を検出するための手段を含み、
前記第1の算出手段は、検出された空気量に応じて前記内燃機関の第1の出力トルクを算出するための手段を含む、請求項1〜4のいずれかに記載の出力トルクの算出装置。
【請求項1】
出力トルクの算出装置であって、
駆動源の目標トルクを設定するための設定手段と、
駆動源の運転状態を検出するための検出手段と、
前記駆動源の運転状態に応じて前記駆動源の第1の出力トルクを算出するための第1の算出手段と、
前記駆動源における無駄時間が加味された前記駆動源の第2の出力トルクを前記目標トルクから算出するとともに、前記第1の出力トルクと前記第2の出力トルクとの差に応じて前記目標トルクを補正することにより、前記駆動源における無駄時間が除かれた前記駆動源の第3の出力トルクを前記目標トルクから算出するための第2の算出手段とを備える、出力トルクの算出装置。
【請求項2】
前記設定手段は、
複数の種類のトルクを考慮して第1の目標トルクを設定するための手段と、
前記複数の種類のトルクのうちの少なくともいずれか一つのトルクが除かれた第2の目標トルクを設定するための手段とを含み、
前記第2の算出手段は、前記駆動源における無駄時間が加味された前記駆動源の前記第2の出力トルクを前記第1の目標トルクから算出するとともに、前記第1の出力トルクと前記第2の出力トルクとの差に応じて前記第2の目標トルクを補正することにより、前記駆動源における無駄時間が除かれた前記駆動源の前記第3の出力トルクを前記第2の目標トルクから算出するための手段を含む、請求項1に記載の出力トルクの算出装置。
【請求項3】
前記第3の出力トルクに対して予め定められた時間だけ遅れた出力トルクを算出するための手段をさらに備える、請求項1または2に記載の出力トルクの算出装置。
【請求項4】
前記第1の出力トルクと前記第2の出力トルクとの差に応じた補正量を、前記駆動源の運転状態毎に学習するための手段をさらに備え、
前記第2の算出手段は、学習された補正量を用いて前記第3の出力トルクを算出するための手段を含む、請求項1〜3のいずれかに記載の出力トルクの算出装置。
【請求項5】
前記駆動源は内燃機関であって、
前記検出手段は、前記内燃機関に吸入される空気量を検出するための手段を含み、
前記第1の算出手段は、検出された空気量に応じて前記内燃機関の第1の出力トルクを算出するための手段を含む、請求項1〜4のいずれかに記載の出力トルクの算出装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2010−13949(P2010−13949A)
【公開日】平成22年1月21日(2010.1.21)
【国際特許分類】
【出願番号】特願2008−172538(P2008−172538)
【出願日】平成20年7月1日(2008.7.1)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成22年1月21日(2010.1.21)
【国際特許分類】
【出願日】平成20年7月1日(2008.7.1)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]