
分光特性測定装置及びその校正方法
【課題】広視野分光イメージングを行う場合であっても高精度に分光特性を測定することができる分光特性測定装置及びその校正方法を提供する。
【解決手段】測定モードでは被測定物の各輝点から発せられた光を分割光学系を通して第1及び第2反射部に入射させ、そこで反射された光を結像光学系によって干渉像を形成する。第1反射部を移動させることにより分割光学系から第1及び第2反射部を経て結像光学系に向かう第1及び第2反射光の間の相対的な光路長差を伸縮させ、そのときの干渉像の光強度変化に基づき被測定物の各輝点のインターフェログラムを求める。校正モードでは、輝点から出射される所定波長λの光を分割光学系に入射させることにより、該輝点に対応する複数の干渉像を形成させ、そのときの光強度変化に基づき該光強度変化の1周期に対応する第1反射部の移動量を求め、輝点の波長λ、第1反射部の移動量、前記干渉像の画角θから前記第1反射部の設置角を求める。
【解決手段】測定モードでは被測定物の各輝点から発せられた光を分割光学系を通して第1及び第2反射部に入射させ、そこで反射された光を結像光学系によって干渉像を形成する。第1反射部を移動させることにより分割光学系から第1及び第2反射部を経て結像光学系に向かう第1及び第2反射光の間の相対的な光路長差を伸縮させ、そのときの干渉像の光強度変化に基づき被測定物の各輝点のインターフェログラムを求める。校正モードでは、輝点から出射される所定波長λの光を分割光学系に入射させることにより、該輝点に対応する複数の干渉像を形成させ、そのときの光強度変化に基づき該光強度変化の1周期に対応する第1反射部の移動量を求め、輝点の波長λ、第1反射部の移動量、前記干渉像の画角θから前記第1反射部の設置角を求める。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、広視野イメージングに有用な分光特性測定装置及びその校正方法に関する。
【背景技術】
【0002】
分光特性の測定技術として、波長分散型分光法或いはフーリエ分光法と呼ばれる分光技術を用いた手法が提案されている(非特許文献1参照)。
波長分散型分光法は、測定試料を透過した光、或いは測定試料面で反射した光(以下、物体光という)を回折格子や音響光学可変波長フィルタ(AOTF;Acousto-Optic Tunable Filter)に照射したときに得られる回折光の回折角が、当該物体光の波長に応じて異なる原理を利用した分光法である。
【0003】
一方、フーリエ分光法(FTIR(フーリエ変換赤外分光光度計:Fourier Transform Infrared Spectroscopy))は、マイケルソン型の2光束干渉光学系を用いた位相シフト干渉による分光計測技術である。物体光をハーフミラーなどのビームスプリッタにより2分岐し、それぞれの光束をミラーにより反射させて再度ハーフミラーに到達させ、2光束を合流させて干渉現象を観察する。2分岐した光束のうちの一方(参照光)を反射するミラーは参照ミラーと呼ばれる。フーリエ分光法では、参照ミラーを光の波長よりも短い分解能で高精度に移動させて干渉光強度を変化させ、いわゆるインターフェログラムを検出し、このインターフェログラムを数学的にフーリエ変換することにより分光特性を取得する。
【0004】
測定試料面から射出される物体光の光線方向は、散乱、屈折、反射等により様々な方向となる。このように多様な方向の光線成分が回折格子や参照ミラーに照射されると、分光精度が低下する。
そのため、いずれの分光法においても物体光の空間的コヒーレンシー(可干渉性)を高めるために、微小開口を有するピンホールやスリットを用いて物体光のうち特定方向の光線成分のみを回折格子や参照ミラーに照射させている。求められる分光性能にもよるが、分散型分光法では穴径が数十ミクロン程度のピンホールが用いられ、フーリエ分光法では数ミリ程度の開口幅を有するスリットが用いられる。
【0005】
このようにピンホールやスリットを用いると、大半の物体光はピンホールやスリットを通過せず測定に供しないことから、光の利用効率が低い。一方、生体膜の内部を透過あるいは反射した散乱光は極微弱光であり、従来の分光技術ではこのような生体膜内部から生じる散乱光等の分光特性を評価することが困難であった。
【0006】
そこで、本発明者は、被測定物を光学的に構成する各輝点から生じる物体光束の干渉現象を利用することにより被測定物のインターフェログラムを求める手法を提案した(特許文献1参照)。
特許文献1に記載の手法では、各輝点から生じる透過光や拡散・散乱光等の物体光は対物レンズを介して位相シフターの固定ミラー部と可動ミラー部に導かれ、これら2つのミラー部から反射される物体光束が結像面において干渉像を形成する。可動ミラー部はピエゾ素子などにより移動されるようになっており、該可動ミラー部の移動に伴い干渉像強度が変化して、いわゆるインターフェログラムを形成する。従って、このインターフェログラムをフーリエ変換することにより物体光の分光特性(スペクトル)を取得することができる。
【0007】
このように特許文献1に記載の手法では、分割光学系(対物レンズ、固定ミラー部、可動ミラー部)を通過してきた光の全てを分析に用いることができるため、光の利用効率が高く、微弱光であってもその分光特性を測定することができる。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2008-309706号公報
【非特許文献】
【0009】
【非特許文献1】平石次郎編「フーリエ変換赤外分光法」学会出版センター, 1985年11月
【発明の概要】
【発明が解決しようとする課題】
【0010】
特許文献1に記載の手法では、可動ミラーを機械的に移動させることにより、その移動量に応じた位相差を固定ミラー部と可動ミラー部で反射される物体光束に与える。このため、可動ミラー部の移動軸に対して様々な角度の光軸を有する光束が入射すると、可動ミラー部の移動量が同じであっても、各物体光に与えられる位相差量が入射角度により異なってしまう。このように異なる位相差量を与えられた物体光は受光面において干渉現象を生じ、インターフェログラムとして一括して検出される。従って、位相差量に光軸の傾き(即ち入射角度)に応じた誤差を有すると、分光特性を劣化させる。特に広視野分光イメージングを行う場合は、測定位置毎の物体光の光軸に対する傾きの変化が大きくなるため、分光特性を大きく劣化させることになる。
【0011】
本発明が解決しようとする課題は、広視野分光イメージングを行う場合であっても高精度に分光特性を測定することができる分光特性測定装置及びその校正方法を提供することである。
【課題を解決するための手段】
【0012】
上記課題を解決するために成された本発明に係る分光特性測定装置は、
a) 被測定物の測定点から出射された光を第1反射部と第2反射部に導く分割光学系と、
b) 前記第1及び第2反射部によって反射された光を同一点に導き干渉像を形成する結像光学系と、
c) 前記第1反射部を移動させることにより前記分割光学系から前記第1反射部を経て前記結像光学系に向かう第1反射光と前記分割光学系から前記第2反射部を経て前記結像光学系に向かう第2反射光の間の光路長差を伸縮する光路長差伸縮手段と、
d) 前記第1反射部の移動量を検出する移動量検出部と、
e) 前記干渉像の光強度を検出する、複数の検出素子が2次元配列された光検出部と、
f) 前記光路長差伸縮手段によって前記光路長差を伸縮させることにより前記光検出部で検出される光強度変化に基づき、前記被測定物の測定点のインターフェログラムを求め、このインターフェログラムをフーリエ変換することによりスペクトルを取得する処理部と
を備える分光特性測定装置において、
さらに、画角が既知の輝点から波長が既知の校正光を出射させる校正光出射手段と、
前記光路長差伸縮手段によって前記光路長差を伸縮させることにより前記光検出部で検出される前記輝点の干渉像の光強度変化の1周期に相当する前記第1反射部の移動量と、前記輝点の画角と、前記校正光の波長とに基づき、前記第1反射部の設置角を求める設置角算出部と、
前記被測定物の測定点の画角を求める画角検出部とを備え、
前記処理部は、前記第1反射部の設置角と前記測定点の画角とから、前記第1反射部の移動量に対応する前記光路長差を求め、該光路長差に基づきスペクトルを校正することを特徴とする。
【0013】
また、本発明の分光特性測定装置は、前記設置角算出部が、前記校正光の前記第1反射部への入射点を原点とするxyz座標系であって、前記第1反射部の反射面の法線を含む面をxz平面、該xz平面に垂直な軸をy軸とする校正光学座標系を定義し、当該校正光学座標系における前記設置角φy(ただし、設置角φyは前記第1反射部の反射面の法線の前記y軸回りの回転角を示す。)を以下の式
φy=(90°+θy)+cos-1{(λ/2Mλ)×θx}
(上記式において、θx及びθyは、前記輝点の干渉像の画角であって当該干渉像と前記校正光学座標系の原点とを結ぶ線とx軸及びy軸との角度、λは前記校正光の波長、Mλは前記輝点の干渉像の光強度変化の1周期に相当する前記第1反射部の移動量を示す。)
から算出することを特徴とする。
【0014】
さらに本発明の分光特性測定装置は、前記設置角算出部が、z軸が前記輝点の干渉像と原点とを結ぶ線となる前記校正光学座標系における前記設置角φyを算出することを特徴とする。
上記構成では、前記輝点の画角θx及びθyがそれぞれθx=0及びθy=0となり、前記設置角φyを容易に算出することができる。
【0015】
また、前記処理部が、前記光路長差Lを、以下の式
L={2Mcos(φy-θ1'y)}/cos(θ1x) (ただし、θ1'y=θ1y+90°)
(上記式において、θ1x及びθ1yは前記測定点の画角、Mは前記第1反射部の移動量を示す。)
から算出するようにしても良い。
【0016】
また、校正光出射手段が、波長が既知の単色光源発せられた光をフライアイレンズに入射させることにより複数の離散輝点を形成するように構成することも可能である。
【0017】
本発明の分光特性測定装置の校正方法は、
a) 被測定物の測定点から出射された光を第1反射部と第2反射部に導く分割光学系と、
b) 前記第1及び第2反射部によって反射された光を同一点に導き干渉像を形成する結像光学系と、
c) 前記第1反射部を移動させることにより前記分割光学系から前記第1反射部を経て前記結像光学系に向かう第1反射光と前記分割光学系から前記第2反射部を経て前記結像光学系に向かう第2反射光の間の光路長差を伸縮する光路長差伸縮手段と、
d) 前記第1反射部の移動量を検出する移動量検出部と、
e) 前記干渉像の光強度を検出する、複数の検出素子が2次元配列された光検出部と、
f) 前記光路長差伸縮手段によって前記光路長差を伸縮させることにより前記光検出部で検出される光強度変化に基づき、前記被測定物の測定点のインターフェログラムを求め、このインターフェログラムをフーリエ変換することによりスペクトルを取得する処理部と、
前記被測定物の測定点の画角を求める画角検出部と
を備える分光特性測定装置において、
画角が既知の輝点から出射された波長が既知の校正光を前記分割光学系に入射させ、そのとき前記結像光学系によって形成される干渉像の光強度変化1周期に相当する前記第1反射部の移動量を前記移動量検出部から取得し、
当該第1反射部の移動量と、前記輝点の画角と、前記校正光の波長とに基づき、前記第1反射部の設置角を求め、
前記第1反射部の設置角と前記測定点の画角とから、前記第1反射部の移動量に対応する前記光路長差を求め、該光路長差に基づきスペクトルを校正することを特徴とする。
【0018】
又、本発明の校正方法は、前記第1反射部の設置角が、前記校正光の前記第1反射部への入射点を原点とするxyz座標系であって、前記第1反射部の反射面の法線を含む面をxz平面、該xz平面に垂直な軸をy軸とする校正光学座標系における前記設置角φy(ただし、設置角φyは前記第1反射部の反射面の法線の前記y軸回りの回転角を示す。)であり、当該設置角φyを以下の式
φy=(90°+θy)+cos-1{(λ/2Mλ)×θx}
(上記式において、θx及びθyは、前記輝点の干渉像の画角であって当該干渉像と前記校正光学座標系の原点とを結ぶ線とx軸及びy軸との角度、λは前記校正光の波長、Mλは前記輝点の干渉像の光強度変化の1周期に相当する前記第1反射部の移動量を示す。)
から算出することを特徴とする。
【0019】
この場合、前記校正光学座標系は、そのz軸が前記輝点の干渉像と原点とを結ぶ線であると、前記輝点の画角θx及びθyがそれぞれθx=0及びθy=0となり、前記設置角φyを容易に算出することができる。
【0020】
また、前記光路長差Lは、以下の式
L={2Mcos(φy-θ1'y)}/cos(θ1x) (ただし、θ1'y=θ1y+90°)
(上記式において、θ1x及びθ1yは前記測定点の画角、Mは前記第1反射部の移動量を示す。)
から算出することを特徴とする。
【発明の効果】
【0021】
本発明によれば、第1反射部の設置角を予め求め、この設置角と第1反射部の移動量及び被測定物の各測定点の画角から画角毎の光路長差を求めることができるので、検出感度の低下を招くことなく高精度に被測定物の各測定点の分光特性を測定することができる。また、被測定物の測定点の画角の大小に関係なく真の光路長差を求めることができるので、広視野分光イメージングに有用な分光特性測定装置を提供することができる。
【図面の簡単な説明】
【0022】
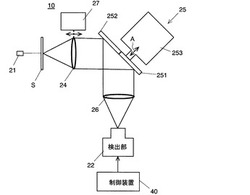
【図1】本発明の一実施形態に係る分光特性測定装置の測定モードを示す概略的なシステム構成図。
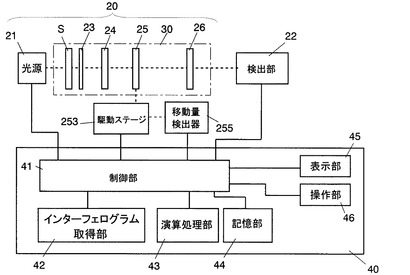
【図2】分光特性測定装置のブロック図。
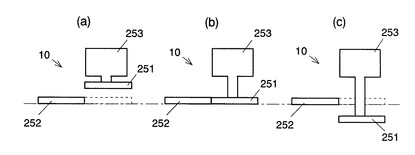
【図3】位相シフターの動作説明図。
【図4】インターフェログラム(a)とそれをフーリエ変換したスペクトルの波形図(b)。
【図5】インターフェログラムの生成原理の説明図。
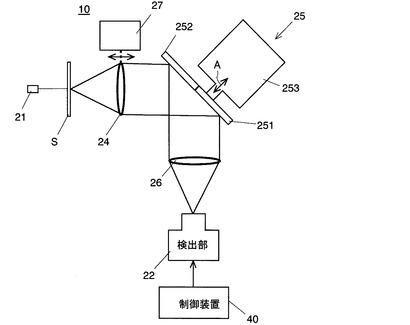
【図6】分光特性測定装置の校正モードを示す概略的なシステム構成図。
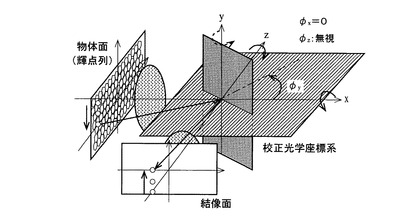
【図7】校正光学座標系と位相シフターの位置関係を示す図。
【図8】xz平面が可動ミラー部の反射面の法線を含むように校正光学座標系を定義したときの校正光学座標系と位相シフターの位置関係を示す図。
【図9】位相シフト量と位相差との関係を説明するための図。
【図10】画角θx≠0である場合の位相差の求め方を説明するための図。
【図11】反射の法則を説明するための図。
【図12】位相シフターの移動に伴い得られたインターフェログラム(a)、インターフェログラムをフーリエ変換して得られた分光特性(b)を示す図。
【図13】校正光学座標系の求め方の説明図。
【図14】干渉像の画角θx及びθyの求め方の説明図。
【図15】離散輝点像を用いて構築した校正光学座標系と画角補正幾何モデルにより測定面(結像面)全体で校正を行った実験結果を示す図。
【発明を実施するための形態】
【0023】
以下、本発明の具体的な実施形態について説明する。
詳しくは後述するように、本実施形態に係る分光特性測定装置は測定モード及び校正モードを備えている。測定モードは被測定物の分光特性測定時に用いられるもので、まずは測定モードの装置構成を図1及び図2を参照しながら説明する。測定モードの分光特性測定装置10は、光学系20と、検出部22と、制御装置40とから構成されている。
光学系20は、光源21と検出部22を結ぶ光路上に設けられた、対物レンズ24、位相シフター25、結像レンズ26とから構成されている。対物レンズ24が分割光学系を、結像レンズ26が結像光学系をそれぞれ構成する。また、検出部22が光検出部に相当する。
【0024】
制御装置40は、制御部41、インターフェログラム取得部42、演算処理部43、記憶部44、表示部45、操作部46等を備えて構成されている。演算処理部43は、後述する、位相シフター25の設置角度の算出、スペクトルの補正、インターフェログラムのフーリエ変換といった演算処理を実行する。従って、本実施例では、演算処理部43が処理部、設置角算出部として機能する。なお、演算処理部43の実体はCPUを中心に構成されるパーソナルコンピュータであって、該コンピュータ上で所定のプログラムを実行することにより演算処理が達成される。
【0025】
光源21から出射された光は被測定物Sに照射され、これにより当該被測定物Sの輝点から多様な方向に向かって散乱光や蛍光発光等の光線(「物体光」ともいう)が放射状に出射する。被測定物Sから出射する光線は、対物レンズ24に入射して平行光束へ変換され、その後、位相シフター25を介して結像レンズ26に入射し、検出部22の受光面22a上に集光する。
【0026】
前記対物レンズ24は、レンズ駆動機構27によって光軸方向に移動可能に構成されている。レンズ駆動機構27は、対物レンズ24の合焦位置を走査するためのもので、例えばピエゾ素子により構成することができる。
【0027】
なお、対物レンズ24を透過した後の光束は完全な平行光束である必要はない。後述するように、1つの輝点から生じた光束を2分割あるいはそれ以上に分割できる程度に広げることができればよい。ただし、平行光束でない場合は、後述の位相シフト量に応じて生じる位相差量に誤差を生じ易い。従って、より高い分光計測精度を得るためにはできるだけ平行光束とすることが望ましい。
【0028】
対物レンズ24を透過してきた平行光束は位相シフター25に到達する。位相シフター25は、可動ミラー部251と、その左部に配置された固定ミラー部252と、可動ミラー部251を移動させる駆動ステージ253とを備えて構成されている。可動ミラー部251及び固定ミラー部252の表面(反射面)は光学的に平坦で且つ本装置10が測定対象とする光の波長帯域を反射可能な光学鏡面となっている。
【0029】
本実施例では、位相シフター25が本発明の光路長差伸縮手段に相当し、可動ミラー部251及び固定ミラー部252がそれぞれ第1及び第2反射部に相当する。また、ここでは、反射光としたが透過光でも良い。
なお、以下の説明では、位相シフター25に到達した光束のうち可動ミラー部251の反射面に到達して反射される光束を可動光、固定ミラー部252の反射面に到達して反射される光束を固定光ともいう。
【0030】
駆動ステージ253は、例えば静電容量センサーを具備する圧電素子から構成されており、制御装置40からの制御信号を受けて可動ミラー部251を光の波長に応じた精度で矢印A方向に移動させる。分光測定能力にもよるが、例えば可視光領域では10nm程度の高精度な位置制御が必要となる。
【0031】
また、位相シフター25は、対物レンズ24からの平行光束の光軸に対して可動ミラー部251及び固定ミラー部252の反射面が45度傾くように配置されている。駆動ステージ253は、可動ミラー部251の反射面の光軸に対する傾きを45度に維持した状態で当該可動ミラー部251を移動する。このような構成により、可動ミラー部251の光軸方向の移動量は、駆動ステージ253の移動量の√2倍となる。また、固定光と可動光の2光束間の相対的な位相変化を与える光路長差は、可動ミラー部251の光軸方向の移動量の2倍となる。
【0032】
位相シフター25に到達し、可動ミラー部251及び固定ミラー部252の反射面で反射された固定光及び可動光は、それぞれ結像レンズ26により収束されて検出部22の受光面(結像面)に入る。検出部22は例えば多数のCCD撮像素子が2次元マトリックス配置された2次元CCDカメラから構成されている。可動ミラー部251の反射面と固定ミラー部252の反射面は、検出部22の結像面で2つの光束の集光位置がずれない程度の精度で平行に構成されている。
【0033】
[測定原理]
次に、本実施形態に係る分光特性測定装置10の測定原理について図3〜図5を用いて説明する。ここでは蛍光や散乱光などの光線が、対物レンズ24と結像レンズ26を経て検出部22の結像面で一つの点に集光し、干渉像を形成する光学モデルに基づいて説明する。
【0034】
前述したように、被測定物Sの一輝点から発せられた物体光は、対物レンズ24を経て位相シフター25の可動ミラー部251及び固定ミラー部252の表面に到達する。このとき、物体光は可動ミラー部251及び固定ミラー部252に分割されて到達する。
なお、固定ミラー部252の表面に到達する光束即ち固定光と、可動ミラー部251の表面に到達する光束即ち可動光の光量がほぼ等しくなるように、対物レンズ24に対する可動ミラー部251及び固定ミラー部252の位置が設定されているが、固定光及び可動光の一方或いは両方の光路に減光フィルタを設置して相対的な光量差を調整し、光量の均等化を行うことも可能である。
【0035】
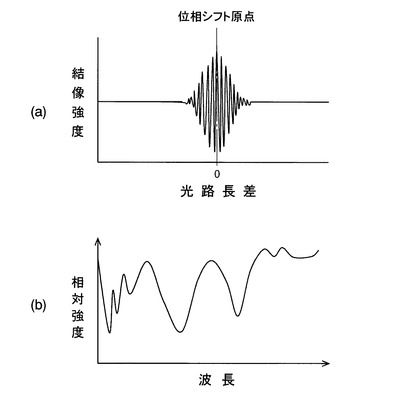
可動ミラー部251及び固定ミラー部252の表面で反射された光は、それぞれ可動光及び固定光として結像レンズ26に入射し、検出部22の結像面において干渉像を形成する。このとき、被測定物Sから発せられる光線には様々な波長の光が含まれることから、可動ミラー部251を移動させて可動光と固定光の光路長差を変化させることにより、図4(a)に示すようなインターフェログラムと呼ばれる結像強度変化(干渉光強度変化)の波形が得られる。図4(a)は検出部22の一つの画素におけるインターフェログラムである。なお、図4(a)において、横軸は可動ミラー部251の移動に伴う可動光と固定光の間の光路長差を、縦軸は結像面上の一点における結像強度を示す。
【0036】
このインターフェログラムをフーリエ変換することにより、被測定物Sの一輝点から発せられた光の波長毎の相対強度である分光特性を取得することができる(図4(b)参照)。本実施形態では検出部22に2次元CCDカメラを用いていることから、被測定物Sの2次元分光測定が可能となる。
【0037】
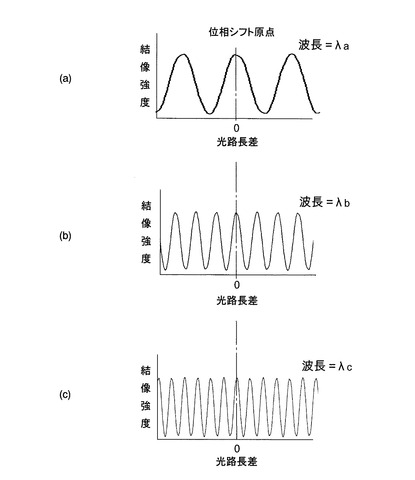
図5(a)〜(c)はインターフェログラムの生成原理の説明図である。まず、測定波長が単一波長の光の場合の光路長差と干渉光強度との関係について説明する。図5において、横軸は可動ミラー部251の移動に伴う固定光と可動光間の相対的な光路長差を示し、縦軸は、検出部22の一つの画素における結像強度を示している。
【0038】
図5(a)〜(c)は波長の長さが異なる3種類の単色光(λa>λb>λc)の光路長差と結像強度との関係を示している。図5の中央付近に示す位相シフト原点(図中、一点鎖線で示す)は、図3(b)に示す状態(可動ミラー部251の反射面が固定ミラー部252の反射面と一致している状態)をいう。可動ミラー部251と固定ミラー部252の反射面が一致しているときは、固定光と可動光に相対的な位相差が生じていない。つまり、これら2光束は結像面において位相が揃って到達するため、互いに強め合う。このため、結像面には明るい輝点が形成され、結像強度が大きくなる。
【0039】
これに対して、可動ミラー部251を図3(b)に示す位置から図3(a)や(c)に示す位置に移動させて固定光と可動光との間に相対的な光路長差を生じさせると、この光路長差が半波長(λ/2)の奇数倍になった時点で弱め合う干渉条件となるため結像強度は小さくなる。また、光路長差が1波長の整数倍になると、2光束間の干渉条件が強め合う状態となり、結像強度が大きくなる。
従って、可動ミラー部251を移動させて光路長差を順次変化させていくと、2光束間の干渉現象による結像強度は周期的に変化することになる。この結像強度変化の周期は、図5(a)〜(c)に示すように、波長が長い光の場合は長く、波長が短い光の場合は短くなる。
【0040】
一方、多波長の光を測定する分光特性測定装置では、多様な長さの波長の干渉光強度変化が足し合わされた輝度値変化として検出されることになる。これが図4(a)に示すインターフェログラムである。可動光と固定光の相対的な光路長差が無い位相シフト原点では、波長に依存せずに2光束は強め合うため、多波長の強度変化を足し合わせた測定値においても高い結像強度となる。しかし、光路長差が大きくなると、各波長の強度変化の周期が合わないため、多波長の強度変化を足し合わせても結像強度は大きくならない。このため、インターフェログラムは、光路長差が大きくなるに従い徐々に輝度値が小さくなっていく結像強度変化が観察される。このようにインターフェログラムは、単一波長の単周期結像強度変化が足し合わされた波形であることから、この波形データをフーリエ変換することにより図4(b)に示すような、波長ごとの相対強度である分光特性を取得することができる。
【0041】
[校正方法]
次に、本実施形態の分光特性測定装置10の校正方法について説明する。
上述したように、本実施形態の分光特性測定装置10では、可動ミラー部251を徐々に移動させて固定光と可動光との間に相対的な光路長差(位相差)を生じさせることにより、インターフェログラムと呼ばれる結像強度変化の波形を得る。そして、このインターフェログラムをフーリエ変換することにより被測定物の輝点から発せられた光の波長毎の相対強度である分光特性を取得する。分光特性を精度良く求めるためには、固定光と可動光との間の位相差を正確に求める必要がある。可動ミラー部251の移動量が同じであっても、可動光と固定光との間の位相差量は、被測定物Sの各輝点から出射した光の位相シフター25(可動ミラー部251及び固定ミラー部252)に対する入射角度により異なる。当該入射角は、各輝点位置における物体光束の光軸の画角と、位相シフター25の設置角(前記物体光の光軸に対する可動ミラー部251及び固定ミラー部252の反射面の角度)によって決まる。このことから、本装置10では、画角補正幾何モデルを構築して位相シフター25の設置角を求め、この設置角を用いて画角毎の前記位相差を求めるようにしている。校正モードとは、位相シフター25の設置角を求めるための装置構成をいう。
【0042】
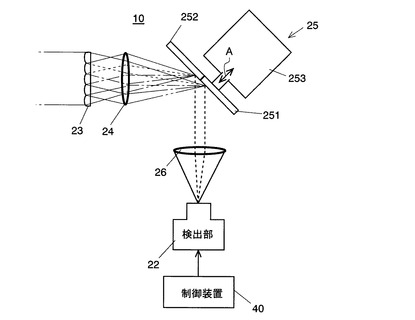
図6に示すように、校正モードでは、波長が既知の単色光源から出射された平行光束がフライアイレンズ23を透過した後、対物レンズ24に入射する。つまり、フライアイレンズ23が校正光射出手段として機能する。フライアイレンズ23は小レンズが複数、碁盤目状に配列されたものから成る。光源21から出射された光束はフライアイレンズ23に入射した後、各小レンズによって集光点を形成し、その後、再び広がって対物レンズ24に入射し、該対物レンズ24を経て位相シフター25の可動ミラー部251及び固定ミラー部252の表面に到達する。そして、可動ミラー部251及び固定ミラー部252の表面で反射された後、可動光及び固定光として結像レンズ26に入射し、検出部22の結像面において干渉する。校正モードでは、照明光学系にフライアイレンズ23を用いることにより複数の離散輝点を形成している。結像面には輝点に対応して干渉像が形成されることから、校正モードでは複数の離散輝点に対応する複数の離散干渉像が結像面に形成される。
【0043】
次に、画角補正幾何モデルを構築するに当たって定義する校正光学座標系について説明する。
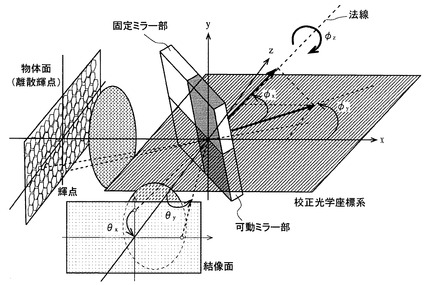
校正光学座標系を定義するためには、位相シフター25の設置角度として3自由度(φx、φy、φz)、輝点から出射され対物レンズ24を経て位相シフター25に入射する光の画角(θx、θy)として2自由度の合計5自由度を考慮する必要がある。しかし、考慮すべきパラメータが多いと画角補正幾何モデルの構築が難しくなる。そこで、本実施形態では反射の法則に着目して校正光学座標系を定義する。すなわち、位相シフター25の可動ミラー部251及び固定ミラー部252の表面である反射面の法線で位相シフター25の設置角度φx、φy、φzを定義する。
【0044】
図7は校正光学座標系と位相シフターとの位置関係を示す図である。この図7に示すように、設置角φxはxz平面からの仰角(つまり、可動ミラー部251の反射面の法線とxz平面のなす角度)、設置角φyはy軸回りの回転角(ここでは、前記法線のxz平面に対する投影とx軸のなす角度としている)、設置角φzは前記反射面に対する法線回りの回転角を示す。設置角φzは法線周りの回転角であるため、反射の法則では無視することができる。
また、図8に示すように、法線を含む平面をxz平面とする校正光学座標系を定義すると、設置角φxは0deg.となる。つまり、このモデルで考慮すべき設置角はφyのみとなる。
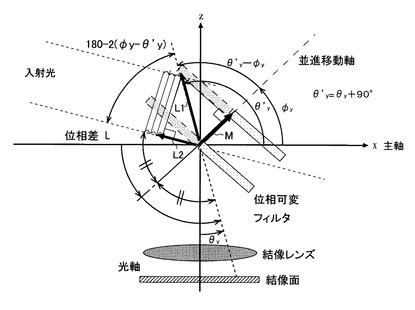
【0045】
このようにxz平面を定義した校正光学座標系において、フライアイレンズ23の各小レンズから放射された光が対物レンズ24を経て位相シフター25に入射すると、これらの入射光は位相シフター25の反射面で反射され、結像面上に干渉像を形成する。また、位相シフター25の可動ミラー部251は主軸(x軸)から設置角φy傾いた並進移動軸(つまり、法線)に沿って位相シフト量Mだけ機械的に移動するものとする。このとき、xz平面上に位置する輝点から出射されて位相シフター25に入射する光、つまり画角θx=0の入射光について考えると、当該入射光の波面に与えられる位相差Lは、図9に示すように位相シフト量Mによって波面に与えられる位相差L1と、初期位置にある可動ミラー部251の反射点から移動後の可動ミラー部251の反射点までの入射光に沿う方向の距離L2との差となる。以上より、θ'y=θy+90°とすると、以下の式(1)〜(3)が得られる。
L=L1−L2 ・・・ (1)
L1=M/cos(φy-θ'y) ・・・ (2)
L2=−1×L1×cos(2(φy-θ'y) ・・・ (3)
式(1)〜(3)より位相差Lは
L=M/cos(φy-θ'y){1+cos(2(φy-θ'y)}
=M/cos(φy-θ'y)×2cos2(φy-θ'y)
=2Mcos(φy-θ'y) ・・・ (4)
となる。
【0046】
位相シフター25の位相シフト量Mは、可動ミラー部251の移動軸に沿う方向の移動量を示し、例えば位相シフター25の駆動ステージ253にリニアエンコーダ等の移動量検出器255(図2参照)を設けることにより該検出器255の検出値から求めることができる。従って、本実施例では移動量検出器255が移動量検出部に相当する。
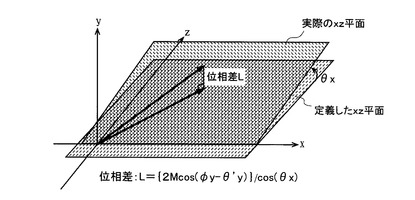
【0047】
なお、式(4)は画角θx=0の輝点からの入射光の位相差Lであるが、画角θx≠0の輝点からの入射光の場合は、図10に示すように、予め定義したxz平面に対して画角θxだけ傾いたxz平面を考えれば良い。この場合は、上述の校正光学座標系を使って求めた位相差は、実際のxz平面における位相差Lを、予め定義したxy平面に投影した長さとなる。つまり、実際の位相差Lは、校正光学座標系で求めた位相差をcosθxで除算したものとなり、下記式(5)で表すことができる。
L={2Mcos(φy-θ'y)}/cos(θx) ・・・ (5)
式(5)より、位相シフター25の設置角φyが求まれば、位相シフト量Mから、画角θx及びθyに応じた位相差量Lが算出可能となることが分かる。
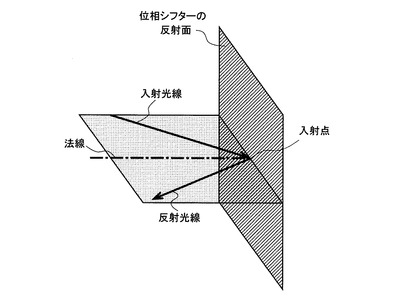
【0048】
逆に、位相シフト量M、位相差量L、輝点の画角、画角θx及びθyが分かれば上記した式(5)から位相シフター25の設置角φyを求めることができる。ただし、式(5)から設置角φyを求めることができるのは、上述したように法線を含む面をxz平面とする校正光学座標系を定義できることが前提となる。実験的に求めることができるデータは結像面上の離散干渉像の分光特性のみであり、法線は視認できない。そこで、結像面上の複数の離散干渉像の中の一つを通る軸をz軸と定義し、画角θx=0、θy=0として設置角φyを算出する。この画角は干渉像の画角であるが、反射の法則より位相シフター25に対する入射角と反射角は同じであることから、図11に示すように、反射光線と法線を含む面をxz平面とした場合には、離散干渉像の画角と離散輝点像の画角は同じになる。
【0049】
以下、位相シフター25の設置角φyを算出する手順について説明する。
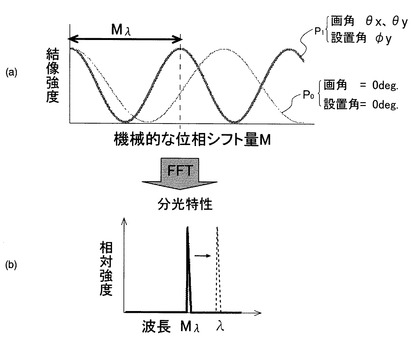
位相シフター25を移動させると、結像面上では位相シフター25の位相シフト量Mに従って干渉像の結像強度が変化する。例えば図12(a)に破線で示すグラフP0は、画角θx=0、θy=0、設置角φy=0のときの波長λの結像強度変化を示している。グラフP0では、結像強度変化1周期分が波長λとなる。これを理論値とする。それに対して画角及び設置角が理論値以外のときの波長λの結像強度変化は実線で示すグラフP1となり、理論値とは異なる周期で結像強度が変化する。これは、画角に応じて1周期に対する波面に与えられる位相差Lの移動軸が位相シフター25の機械的な移動軸に対して傾いていることから、実質的に波面に与えられる位相差量が異なるためである。このときの位相シフト量をMλとすると、画角及び設置角が理論値以外のときは、位相シフト量がMλのときに波長λと等しい位相差Lが与えられたことになる。このMλは、図12(b)に示すように、位相シフトに伴う結像強度変化のデータ(インターフェログラム)をフーリエ変換することにより得られる分光特性から求めることができる。単一波長の光源を用いた場合は、インターフェログラムをフーリエ変換することにより輝線スペクトルが得られ、この輝線スペクトルのピーク値としてMλを求めることができる。
【0050】
そこで、式(5)の位相差量Lに波長λを、位相シフト量Mに実験的に求めたMλを代入することにより、以下に示す設置角φyの算出式(6)を求めることができる。
φy=cos-1(λ/2Mλcosθx)+θ'y ・・・ (6)
【0051】
式(6)では、画角θx及びθyも未知である。しかし、上述したように、結像面上の複数の干渉像の中の1つを選択し、この干渉像を通る軸をz軸と仮定すると、画角θx及びθyはいずれも0となり、波長λ及び位相シフト量Mλが分かれば、式(6)から設置角φyを算出することができる。
【0052】
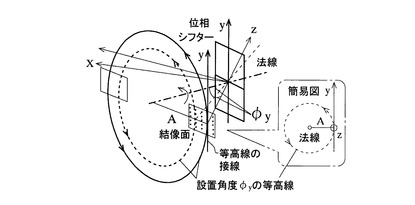
なお、図13に示すように、法線及びz軸によって構成されるxz平面を法線を中心に回転させる。このとき、位相シフター25の設置角φyが変化しないようにすると、その円の接線が空間座標系(校正光学座標系)のy軸となる。これは、円の接線が、結像面に対するxz平面の射影であるA線(図13参照)、つまり、常に円の中心を通る線に対して垂直となるからである。取得した2次元データは設置角φyの等高線の一部である。従って、複数の離散干渉像の任意の一点をz軸が通ると決定して校正光学座標系を定義することにより、設置角φyを求めることができる。
【0053】
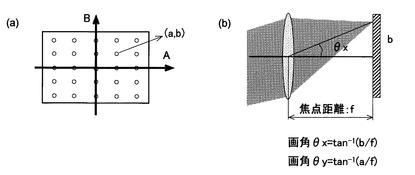
上記のようにして設置角φyを求めることができれば、結像面上の全ての干渉像について、その画角θx、θyと位相シフト量Mから、前述した式(5)を用いて真の位相差Lを求めることができる。この場合の干渉像の画角θx、θyは、図14に示すように、結像レンズの焦点距離と干渉像の形成位置から次の式(7)及び(8)により求めることができる。
θx=tan-1(b/f) ・・・ (7)
θy=tan-1(a/f) ・・・ (8)
ここで、fは結象レンズの焦点距離、aは図14(a)のA軸方向の距離、bはB軸方向の距離を示す。結像面に複数の画素が所定の間隔でm×n配列されたCCDカメラにおいては、その画素の位置からa及びbを求めることができる。従って、前記CCDカメラ(検出部22)及び演算処理部43が本発明の画角検出部を構成する。
【0054】
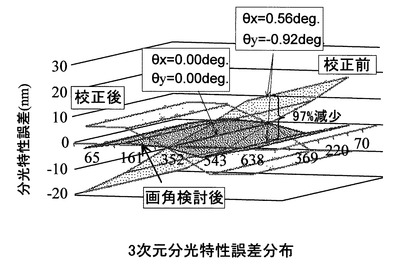
図15は物体面に形成した離散輝点像を用いて構築した校正光学座標系と画角補正幾何モデルにより測定面(結像面)全体で校正を行った実験結果を示したものである。この実験では、フライアイレンズ(焦点距離:10mm、直径:2.3mm、中心間距離:1.7mm)を用いて離散輝点像を形成し、CCDカメラ(型番:XC-75、画素サイズ:8.4μm(H)×9.8μm(V))上にて光学倍率1/2倍で観察した。また、本実験系の視野範囲は12.9mmである。光源には輝線スペクトルを有するHe-Neレーザ(波長:632.8nm)を用いた。その結果、設置角φyの値は30deg.となった。
【0055】
このように求めた設置角φyを用いて結像面上の全ての干渉像の2次元データから式(5)から位相差Lを求めることで各干渉像の分光特性を校正することができる。図15では、CCDカメラの画素毎、つまり結像面上における干渉像の形成位置と校正前後の分光特性誤差及び校正後の分光特性誤差の関係を示している。図15から、画角が小さいときは校正前と校正後の分光特性の差はほとんどないが、画角が大きくなると校正前と校正後の分光特性の差が大きくなることが分かる。具体的には、例えば画角θx=0.56deg.、θy=-0.92deg.の位置にある干渉像の場合、取得した分光特性の誤差を20.2mmから0.70mmまで最大97%減少した。また、測定面全体でも±3mmの範囲で校正することができた。
【0056】
このように本実施形態によれば、位相シフター25の設置角φyを予め実験的に求め、この設置角φyを用いて画角毎の位相差を算出するようにしたので、分光特性を正しく校正することができる。
【0057】
尚、本発明は上記した実施形態に限らず、本発明の要旨を変更しない範囲で種々の拡張、変形が可能である。
例えば、上記実施形態では離散干渉像の任意の一つについて校正光学座標系を定義して位相シフターの設置角を求めるようにしたが、図13に示すように、求まる設置角が理論的には同じになる複数の離散干渉像についてそれぞれ校正光学座標系を定義して位相シフターの設置角を求め、これらの平均値を用いて画角毎の位相差を求めるようにしても良い。このようにすれば、測定誤差を小さく抑えることができる。
【0058】
また、全ての離散干渉像の結像強度変化から、画角毎に波長及び位相シフターの移動量と位相差量との関係を表すデータテーブルを作成し、このデータテーブルを用いて画角毎に分光特性を校正するようにしても良い。
【0059】
離散輝点はフライアイレンズを用いる他、2次元マトリックス配列された多数の光源を用いて形成することができる。
位相シフターの設置角は、少なくとも一つの干渉像について結像強度変化のデータが分かれば求めることが可能である。従って、校正モードでは、物体面上に1個の輝点を形成し、この輝点に対応する干渉像の分光特性から位相シフターの設置角を求めるようにしても良い。
【符号の説明】
【0060】
10…分光特性測定装置
20…光学系
21…光源
22…検出部
22a…受光面(結像面)
23…フライアイレンズ
24…対物レンズ
25…位相シフター
251…可動ミラー部
252…固定ミラー部
253…駆動ステージ
255…移動量検出器
26…結像レンズ
27…レンズ駆動機構
40…制御装置
41…制御部
43…演算処理部
【技術分野】
【0001】
本発明は、広視野イメージングに有用な分光特性測定装置及びその校正方法に関する。
【背景技術】
【0002】
分光特性の測定技術として、波長分散型分光法或いはフーリエ分光法と呼ばれる分光技術を用いた手法が提案されている(非特許文献1参照)。
波長分散型分光法は、測定試料を透過した光、或いは測定試料面で反射した光(以下、物体光という)を回折格子や音響光学可変波長フィルタ(AOTF;Acousto-Optic Tunable Filter)に照射したときに得られる回折光の回折角が、当該物体光の波長に応じて異なる原理を利用した分光法である。
【0003】
一方、フーリエ分光法(FTIR(フーリエ変換赤外分光光度計:Fourier Transform Infrared Spectroscopy))は、マイケルソン型の2光束干渉光学系を用いた位相シフト干渉による分光計測技術である。物体光をハーフミラーなどのビームスプリッタにより2分岐し、それぞれの光束をミラーにより反射させて再度ハーフミラーに到達させ、2光束を合流させて干渉現象を観察する。2分岐した光束のうちの一方(参照光)を反射するミラーは参照ミラーと呼ばれる。フーリエ分光法では、参照ミラーを光の波長よりも短い分解能で高精度に移動させて干渉光強度を変化させ、いわゆるインターフェログラムを検出し、このインターフェログラムを数学的にフーリエ変換することにより分光特性を取得する。
【0004】
測定試料面から射出される物体光の光線方向は、散乱、屈折、反射等により様々な方向となる。このように多様な方向の光線成分が回折格子や参照ミラーに照射されると、分光精度が低下する。
そのため、いずれの分光法においても物体光の空間的コヒーレンシー(可干渉性)を高めるために、微小開口を有するピンホールやスリットを用いて物体光のうち特定方向の光線成分のみを回折格子や参照ミラーに照射させている。求められる分光性能にもよるが、分散型分光法では穴径が数十ミクロン程度のピンホールが用いられ、フーリエ分光法では数ミリ程度の開口幅を有するスリットが用いられる。
【0005】
このようにピンホールやスリットを用いると、大半の物体光はピンホールやスリットを通過せず測定に供しないことから、光の利用効率が低い。一方、生体膜の内部を透過あるいは反射した散乱光は極微弱光であり、従来の分光技術ではこのような生体膜内部から生じる散乱光等の分光特性を評価することが困難であった。
【0006】
そこで、本発明者は、被測定物を光学的に構成する各輝点から生じる物体光束の干渉現象を利用することにより被測定物のインターフェログラムを求める手法を提案した(特許文献1参照)。
特許文献1に記載の手法では、各輝点から生じる透過光や拡散・散乱光等の物体光は対物レンズを介して位相シフターの固定ミラー部と可動ミラー部に導かれ、これら2つのミラー部から反射される物体光束が結像面において干渉像を形成する。可動ミラー部はピエゾ素子などにより移動されるようになっており、該可動ミラー部の移動に伴い干渉像強度が変化して、いわゆるインターフェログラムを形成する。従って、このインターフェログラムをフーリエ変換することにより物体光の分光特性(スペクトル)を取得することができる。
【0007】
このように特許文献1に記載の手法では、分割光学系(対物レンズ、固定ミラー部、可動ミラー部)を通過してきた光の全てを分析に用いることができるため、光の利用効率が高く、微弱光であってもその分光特性を測定することができる。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2008-309706号公報
【非特許文献】
【0009】
【非特許文献1】平石次郎編「フーリエ変換赤外分光法」学会出版センター, 1985年11月
【発明の概要】
【発明が解決しようとする課題】
【0010】
特許文献1に記載の手法では、可動ミラーを機械的に移動させることにより、その移動量に応じた位相差を固定ミラー部と可動ミラー部で反射される物体光束に与える。このため、可動ミラー部の移動軸に対して様々な角度の光軸を有する光束が入射すると、可動ミラー部の移動量が同じであっても、各物体光に与えられる位相差量が入射角度により異なってしまう。このように異なる位相差量を与えられた物体光は受光面において干渉現象を生じ、インターフェログラムとして一括して検出される。従って、位相差量に光軸の傾き(即ち入射角度)に応じた誤差を有すると、分光特性を劣化させる。特に広視野分光イメージングを行う場合は、測定位置毎の物体光の光軸に対する傾きの変化が大きくなるため、分光特性を大きく劣化させることになる。
【0011】
本発明が解決しようとする課題は、広視野分光イメージングを行う場合であっても高精度に分光特性を測定することができる分光特性測定装置及びその校正方法を提供することである。
【課題を解決するための手段】
【0012】
上記課題を解決するために成された本発明に係る分光特性測定装置は、
a) 被測定物の測定点から出射された光を第1反射部と第2反射部に導く分割光学系と、
b) 前記第1及び第2反射部によって反射された光を同一点に導き干渉像を形成する結像光学系と、
c) 前記第1反射部を移動させることにより前記分割光学系から前記第1反射部を経て前記結像光学系に向かう第1反射光と前記分割光学系から前記第2反射部を経て前記結像光学系に向かう第2反射光の間の光路長差を伸縮する光路長差伸縮手段と、
d) 前記第1反射部の移動量を検出する移動量検出部と、
e) 前記干渉像の光強度を検出する、複数の検出素子が2次元配列された光検出部と、
f) 前記光路長差伸縮手段によって前記光路長差を伸縮させることにより前記光検出部で検出される光強度変化に基づき、前記被測定物の測定点のインターフェログラムを求め、このインターフェログラムをフーリエ変換することによりスペクトルを取得する処理部と
を備える分光特性測定装置において、
さらに、画角が既知の輝点から波長が既知の校正光を出射させる校正光出射手段と、
前記光路長差伸縮手段によって前記光路長差を伸縮させることにより前記光検出部で検出される前記輝点の干渉像の光強度変化の1周期に相当する前記第1反射部の移動量と、前記輝点の画角と、前記校正光の波長とに基づき、前記第1反射部の設置角を求める設置角算出部と、
前記被測定物の測定点の画角を求める画角検出部とを備え、
前記処理部は、前記第1反射部の設置角と前記測定点の画角とから、前記第1反射部の移動量に対応する前記光路長差を求め、該光路長差に基づきスペクトルを校正することを特徴とする。
【0013】
また、本発明の分光特性測定装置は、前記設置角算出部が、前記校正光の前記第1反射部への入射点を原点とするxyz座標系であって、前記第1反射部の反射面の法線を含む面をxz平面、該xz平面に垂直な軸をy軸とする校正光学座標系を定義し、当該校正光学座標系における前記設置角φy(ただし、設置角φyは前記第1反射部の反射面の法線の前記y軸回りの回転角を示す。)を以下の式
φy=(90°+θy)+cos-1{(λ/2Mλ)×θx}
(上記式において、θx及びθyは、前記輝点の干渉像の画角であって当該干渉像と前記校正光学座標系の原点とを結ぶ線とx軸及びy軸との角度、λは前記校正光の波長、Mλは前記輝点の干渉像の光強度変化の1周期に相当する前記第1反射部の移動量を示す。)
から算出することを特徴とする。
【0014】
さらに本発明の分光特性測定装置は、前記設置角算出部が、z軸が前記輝点の干渉像と原点とを結ぶ線となる前記校正光学座標系における前記設置角φyを算出することを特徴とする。
上記構成では、前記輝点の画角θx及びθyがそれぞれθx=0及びθy=0となり、前記設置角φyを容易に算出することができる。
【0015】
また、前記処理部が、前記光路長差Lを、以下の式
L={2Mcos(φy-θ1'y)}/cos(θ1x) (ただし、θ1'y=θ1y+90°)
(上記式において、θ1x及びθ1yは前記測定点の画角、Mは前記第1反射部の移動量を示す。)
から算出するようにしても良い。
【0016】
また、校正光出射手段が、波長が既知の単色光源発せられた光をフライアイレンズに入射させることにより複数の離散輝点を形成するように構成することも可能である。
【0017】
本発明の分光特性測定装置の校正方法は、
a) 被測定物の測定点から出射された光を第1反射部と第2反射部に導く分割光学系と、
b) 前記第1及び第2反射部によって反射された光を同一点に導き干渉像を形成する結像光学系と、
c) 前記第1反射部を移動させることにより前記分割光学系から前記第1反射部を経て前記結像光学系に向かう第1反射光と前記分割光学系から前記第2反射部を経て前記結像光学系に向かう第2反射光の間の光路長差を伸縮する光路長差伸縮手段と、
d) 前記第1反射部の移動量を検出する移動量検出部と、
e) 前記干渉像の光強度を検出する、複数の検出素子が2次元配列された光検出部と、
f) 前記光路長差伸縮手段によって前記光路長差を伸縮させることにより前記光検出部で検出される光強度変化に基づき、前記被測定物の測定点のインターフェログラムを求め、このインターフェログラムをフーリエ変換することによりスペクトルを取得する処理部と、
前記被測定物の測定点の画角を求める画角検出部と
を備える分光特性測定装置において、
画角が既知の輝点から出射された波長が既知の校正光を前記分割光学系に入射させ、そのとき前記結像光学系によって形成される干渉像の光強度変化1周期に相当する前記第1反射部の移動量を前記移動量検出部から取得し、
当該第1反射部の移動量と、前記輝点の画角と、前記校正光の波長とに基づき、前記第1反射部の設置角を求め、
前記第1反射部の設置角と前記測定点の画角とから、前記第1反射部の移動量に対応する前記光路長差を求め、該光路長差に基づきスペクトルを校正することを特徴とする。
【0018】
又、本発明の校正方法は、前記第1反射部の設置角が、前記校正光の前記第1反射部への入射点を原点とするxyz座標系であって、前記第1反射部の反射面の法線を含む面をxz平面、該xz平面に垂直な軸をy軸とする校正光学座標系における前記設置角φy(ただし、設置角φyは前記第1反射部の反射面の法線の前記y軸回りの回転角を示す。)であり、当該設置角φyを以下の式
φy=(90°+θy)+cos-1{(λ/2Mλ)×θx}
(上記式において、θx及びθyは、前記輝点の干渉像の画角であって当該干渉像と前記校正光学座標系の原点とを結ぶ線とx軸及びy軸との角度、λは前記校正光の波長、Mλは前記輝点の干渉像の光強度変化の1周期に相当する前記第1反射部の移動量を示す。)
から算出することを特徴とする。
【0019】
この場合、前記校正光学座標系は、そのz軸が前記輝点の干渉像と原点とを結ぶ線であると、前記輝点の画角θx及びθyがそれぞれθx=0及びθy=0となり、前記設置角φyを容易に算出することができる。
【0020】
また、前記光路長差Lは、以下の式
L={2Mcos(φy-θ1'y)}/cos(θ1x) (ただし、θ1'y=θ1y+90°)
(上記式において、θ1x及びθ1yは前記測定点の画角、Mは前記第1反射部の移動量を示す。)
から算出することを特徴とする。
【発明の効果】
【0021】
本発明によれば、第1反射部の設置角を予め求め、この設置角と第1反射部の移動量及び被測定物の各測定点の画角から画角毎の光路長差を求めることができるので、検出感度の低下を招くことなく高精度に被測定物の各測定点の分光特性を測定することができる。また、被測定物の測定点の画角の大小に関係なく真の光路長差を求めることができるので、広視野分光イメージングに有用な分光特性測定装置を提供することができる。
【図面の簡単な説明】
【0022】
【図1】本発明の一実施形態に係る分光特性測定装置の測定モードを示す概略的なシステム構成図。
【図2】分光特性測定装置のブロック図。
【図3】位相シフターの動作説明図。
【図4】インターフェログラム(a)とそれをフーリエ変換したスペクトルの波形図(b)。
【図5】インターフェログラムの生成原理の説明図。
【図6】分光特性測定装置の校正モードを示す概略的なシステム構成図。
【図7】校正光学座標系と位相シフターの位置関係を示す図。
【図8】xz平面が可動ミラー部の反射面の法線を含むように校正光学座標系を定義したときの校正光学座標系と位相シフターの位置関係を示す図。
【図9】位相シフト量と位相差との関係を説明するための図。
【図10】画角θx≠0である場合の位相差の求め方を説明するための図。
【図11】反射の法則を説明するための図。
【図12】位相シフターの移動に伴い得られたインターフェログラム(a)、インターフェログラムをフーリエ変換して得られた分光特性(b)を示す図。
【図13】校正光学座標系の求め方の説明図。
【図14】干渉像の画角θx及びθyの求め方の説明図。
【図15】離散輝点像を用いて構築した校正光学座標系と画角補正幾何モデルにより測定面(結像面)全体で校正を行った実験結果を示す図。
【発明を実施するための形態】
【0023】
以下、本発明の具体的な実施形態について説明する。
詳しくは後述するように、本実施形態に係る分光特性測定装置は測定モード及び校正モードを備えている。測定モードは被測定物の分光特性測定時に用いられるもので、まずは測定モードの装置構成を図1及び図2を参照しながら説明する。測定モードの分光特性測定装置10は、光学系20と、検出部22と、制御装置40とから構成されている。
光学系20は、光源21と検出部22を結ぶ光路上に設けられた、対物レンズ24、位相シフター25、結像レンズ26とから構成されている。対物レンズ24が分割光学系を、結像レンズ26が結像光学系をそれぞれ構成する。また、検出部22が光検出部に相当する。
【0024】
制御装置40は、制御部41、インターフェログラム取得部42、演算処理部43、記憶部44、表示部45、操作部46等を備えて構成されている。演算処理部43は、後述する、位相シフター25の設置角度の算出、スペクトルの補正、インターフェログラムのフーリエ変換といった演算処理を実行する。従って、本実施例では、演算処理部43が処理部、設置角算出部として機能する。なお、演算処理部43の実体はCPUを中心に構成されるパーソナルコンピュータであって、該コンピュータ上で所定のプログラムを実行することにより演算処理が達成される。
【0025】
光源21から出射された光は被測定物Sに照射され、これにより当該被測定物Sの輝点から多様な方向に向かって散乱光や蛍光発光等の光線(「物体光」ともいう)が放射状に出射する。被測定物Sから出射する光線は、対物レンズ24に入射して平行光束へ変換され、その後、位相シフター25を介して結像レンズ26に入射し、検出部22の受光面22a上に集光する。
【0026】
前記対物レンズ24は、レンズ駆動機構27によって光軸方向に移動可能に構成されている。レンズ駆動機構27は、対物レンズ24の合焦位置を走査するためのもので、例えばピエゾ素子により構成することができる。
【0027】
なお、対物レンズ24を透過した後の光束は完全な平行光束である必要はない。後述するように、1つの輝点から生じた光束を2分割あるいはそれ以上に分割できる程度に広げることができればよい。ただし、平行光束でない場合は、後述の位相シフト量に応じて生じる位相差量に誤差を生じ易い。従って、より高い分光計測精度を得るためにはできるだけ平行光束とすることが望ましい。
【0028】
対物レンズ24を透過してきた平行光束は位相シフター25に到達する。位相シフター25は、可動ミラー部251と、その左部に配置された固定ミラー部252と、可動ミラー部251を移動させる駆動ステージ253とを備えて構成されている。可動ミラー部251及び固定ミラー部252の表面(反射面)は光学的に平坦で且つ本装置10が測定対象とする光の波長帯域を反射可能な光学鏡面となっている。
【0029】
本実施例では、位相シフター25が本発明の光路長差伸縮手段に相当し、可動ミラー部251及び固定ミラー部252がそれぞれ第1及び第2反射部に相当する。また、ここでは、反射光としたが透過光でも良い。
なお、以下の説明では、位相シフター25に到達した光束のうち可動ミラー部251の反射面に到達して反射される光束を可動光、固定ミラー部252の反射面に到達して反射される光束を固定光ともいう。
【0030】
駆動ステージ253は、例えば静電容量センサーを具備する圧電素子から構成されており、制御装置40からの制御信号を受けて可動ミラー部251を光の波長に応じた精度で矢印A方向に移動させる。分光測定能力にもよるが、例えば可視光領域では10nm程度の高精度な位置制御が必要となる。
【0031】
また、位相シフター25は、対物レンズ24からの平行光束の光軸に対して可動ミラー部251及び固定ミラー部252の反射面が45度傾くように配置されている。駆動ステージ253は、可動ミラー部251の反射面の光軸に対する傾きを45度に維持した状態で当該可動ミラー部251を移動する。このような構成により、可動ミラー部251の光軸方向の移動量は、駆動ステージ253の移動量の√2倍となる。また、固定光と可動光の2光束間の相対的な位相変化を与える光路長差は、可動ミラー部251の光軸方向の移動量の2倍となる。
【0032】
位相シフター25に到達し、可動ミラー部251及び固定ミラー部252の反射面で反射された固定光及び可動光は、それぞれ結像レンズ26により収束されて検出部22の受光面(結像面)に入る。検出部22は例えば多数のCCD撮像素子が2次元マトリックス配置された2次元CCDカメラから構成されている。可動ミラー部251の反射面と固定ミラー部252の反射面は、検出部22の結像面で2つの光束の集光位置がずれない程度の精度で平行に構成されている。
【0033】
[測定原理]
次に、本実施形態に係る分光特性測定装置10の測定原理について図3〜図5を用いて説明する。ここでは蛍光や散乱光などの光線が、対物レンズ24と結像レンズ26を経て検出部22の結像面で一つの点に集光し、干渉像を形成する光学モデルに基づいて説明する。
【0034】
前述したように、被測定物Sの一輝点から発せられた物体光は、対物レンズ24を経て位相シフター25の可動ミラー部251及び固定ミラー部252の表面に到達する。このとき、物体光は可動ミラー部251及び固定ミラー部252に分割されて到達する。
なお、固定ミラー部252の表面に到達する光束即ち固定光と、可動ミラー部251の表面に到達する光束即ち可動光の光量がほぼ等しくなるように、対物レンズ24に対する可動ミラー部251及び固定ミラー部252の位置が設定されているが、固定光及び可動光の一方或いは両方の光路に減光フィルタを設置して相対的な光量差を調整し、光量の均等化を行うことも可能である。
【0035】
可動ミラー部251及び固定ミラー部252の表面で反射された光は、それぞれ可動光及び固定光として結像レンズ26に入射し、検出部22の結像面において干渉像を形成する。このとき、被測定物Sから発せられる光線には様々な波長の光が含まれることから、可動ミラー部251を移動させて可動光と固定光の光路長差を変化させることにより、図4(a)に示すようなインターフェログラムと呼ばれる結像強度変化(干渉光強度変化)の波形が得られる。図4(a)は検出部22の一つの画素におけるインターフェログラムである。なお、図4(a)において、横軸は可動ミラー部251の移動に伴う可動光と固定光の間の光路長差を、縦軸は結像面上の一点における結像強度を示す。
【0036】
このインターフェログラムをフーリエ変換することにより、被測定物Sの一輝点から発せられた光の波長毎の相対強度である分光特性を取得することができる(図4(b)参照)。本実施形態では検出部22に2次元CCDカメラを用いていることから、被測定物Sの2次元分光測定が可能となる。
【0037】
図5(a)〜(c)はインターフェログラムの生成原理の説明図である。まず、測定波長が単一波長の光の場合の光路長差と干渉光強度との関係について説明する。図5において、横軸は可動ミラー部251の移動に伴う固定光と可動光間の相対的な光路長差を示し、縦軸は、検出部22の一つの画素における結像強度を示している。
【0038】
図5(a)〜(c)は波長の長さが異なる3種類の単色光(λa>λb>λc)の光路長差と結像強度との関係を示している。図5の中央付近に示す位相シフト原点(図中、一点鎖線で示す)は、図3(b)に示す状態(可動ミラー部251の反射面が固定ミラー部252の反射面と一致している状態)をいう。可動ミラー部251と固定ミラー部252の反射面が一致しているときは、固定光と可動光に相対的な位相差が生じていない。つまり、これら2光束は結像面において位相が揃って到達するため、互いに強め合う。このため、結像面には明るい輝点が形成され、結像強度が大きくなる。
【0039】
これに対して、可動ミラー部251を図3(b)に示す位置から図3(a)や(c)に示す位置に移動させて固定光と可動光との間に相対的な光路長差を生じさせると、この光路長差が半波長(λ/2)の奇数倍になった時点で弱め合う干渉条件となるため結像強度は小さくなる。また、光路長差が1波長の整数倍になると、2光束間の干渉条件が強め合う状態となり、結像強度が大きくなる。
従って、可動ミラー部251を移動させて光路長差を順次変化させていくと、2光束間の干渉現象による結像強度は周期的に変化することになる。この結像強度変化の周期は、図5(a)〜(c)に示すように、波長が長い光の場合は長く、波長が短い光の場合は短くなる。
【0040】
一方、多波長の光を測定する分光特性測定装置では、多様な長さの波長の干渉光強度変化が足し合わされた輝度値変化として検出されることになる。これが図4(a)に示すインターフェログラムである。可動光と固定光の相対的な光路長差が無い位相シフト原点では、波長に依存せずに2光束は強め合うため、多波長の強度変化を足し合わせた測定値においても高い結像強度となる。しかし、光路長差が大きくなると、各波長の強度変化の周期が合わないため、多波長の強度変化を足し合わせても結像強度は大きくならない。このため、インターフェログラムは、光路長差が大きくなるに従い徐々に輝度値が小さくなっていく結像強度変化が観察される。このようにインターフェログラムは、単一波長の単周期結像強度変化が足し合わされた波形であることから、この波形データをフーリエ変換することにより図4(b)に示すような、波長ごとの相対強度である分光特性を取得することができる。
【0041】
[校正方法]
次に、本実施形態の分光特性測定装置10の校正方法について説明する。
上述したように、本実施形態の分光特性測定装置10では、可動ミラー部251を徐々に移動させて固定光と可動光との間に相対的な光路長差(位相差)を生じさせることにより、インターフェログラムと呼ばれる結像強度変化の波形を得る。そして、このインターフェログラムをフーリエ変換することにより被測定物の輝点から発せられた光の波長毎の相対強度である分光特性を取得する。分光特性を精度良く求めるためには、固定光と可動光との間の位相差を正確に求める必要がある。可動ミラー部251の移動量が同じであっても、可動光と固定光との間の位相差量は、被測定物Sの各輝点から出射した光の位相シフター25(可動ミラー部251及び固定ミラー部252)に対する入射角度により異なる。当該入射角は、各輝点位置における物体光束の光軸の画角と、位相シフター25の設置角(前記物体光の光軸に対する可動ミラー部251及び固定ミラー部252の反射面の角度)によって決まる。このことから、本装置10では、画角補正幾何モデルを構築して位相シフター25の設置角を求め、この設置角を用いて画角毎の前記位相差を求めるようにしている。校正モードとは、位相シフター25の設置角を求めるための装置構成をいう。
【0042】
図6に示すように、校正モードでは、波長が既知の単色光源から出射された平行光束がフライアイレンズ23を透過した後、対物レンズ24に入射する。つまり、フライアイレンズ23が校正光射出手段として機能する。フライアイレンズ23は小レンズが複数、碁盤目状に配列されたものから成る。光源21から出射された光束はフライアイレンズ23に入射した後、各小レンズによって集光点を形成し、その後、再び広がって対物レンズ24に入射し、該対物レンズ24を経て位相シフター25の可動ミラー部251及び固定ミラー部252の表面に到達する。そして、可動ミラー部251及び固定ミラー部252の表面で反射された後、可動光及び固定光として結像レンズ26に入射し、検出部22の結像面において干渉する。校正モードでは、照明光学系にフライアイレンズ23を用いることにより複数の離散輝点を形成している。結像面には輝点に対応して干渉像が形成されることから、校正モードでは複数の離散輝点に対応する複数の離散干渉像が結像面に形成される。
【0043】
次に、画角補正幾何モデルを構築するに当たって定義する校正光学座標系について説明する。
校正光学座標系を定義するためには、位相シフター25の設置角度として3自由度(φx、φy、φz)、輝点から出射され対物レンズ24を経て位相シフター25に入射する光の画角(θx、θy)として2自由度の合計5自由度を考慮する必要がある。しかし、考慮すべきパラメータが多いと画角補正幾何モデルの構築が難しくなる。そこで、本実施形態では反射の法則に着目して校正光学座標系を定義する。すなわち、位相シフター25の可動ミラー部251及び固定ミラー部252の表面である反射面の法線で位相シフター25の設置角度φx、φy、φzを定義する。
【0044】
図7は校正光学座標系と位相シフターとの位置関係を示す図である。この図7に示すように、設置角φxはxz平面からの仰角(つまり、可動ミラー部251の反射面の法線とxz平面のなす角度)、設置角φyはy軸回りの回転角(ここでは、前記法線のxz平面に対する投影とx軸のなす角度としている)、設置角φzは前記反射面に対する法線回りの回転角を示す。設置角φzは法線周りの回転角であるため、反射の法則では無視することができる。
また、図8に示すように、法線を含む平面をxz平面とする校正光学座標系を定義すると、設置角φxは0deg.となる。つまり、このモデルで考慮すべき設置角はφyのみとなる。
【0045】
このようにxz平面を定義した校正光学座標系において、フライアイレンズ23の各小レンズから放射された光が対物レンズ24を経て位相シフター25に入射すると、これらの入射光は位相シフター25の反射面で反射され、結像面上に干渉像を形成する。また、位相シフター25の可動ミラー部251は主軸(x軸)から設置角φy傾いた並進移動軸(つまり、法線)に沿って位相シフト量Mだけ機械的に移動するものとする。このとき、xz平面上に位置する輝点から出射されて位相シフター25に入射する光、つまり画角θx=0の入射光について考えると、当該入射光の波面に与えられる位相差Lは、図9に示すように位相シフト量Mによって波面に与えられる位相差L1と、初期位置にある可動ミラー部251の反射点から移動後の可動ミラー部251の反射点までの入射光に沿う方向の距離L2との差となる。以上より、θ'y=θy+90°とすると、以下の式(1)〜(3)が得られる。
L=L1−L2 ・・・ (1)
L1=M/cos(φy-θ'y) ・・・ (2)
L2=−1×L1×cos(2(φy-θ'y) ・・・ (3)
式(1)〜(3)より位相差Lは
L=M/cos(φy-θ'y){1+cos(2(φy-θ'y)}
=M/cos(φy-θ'y)×2cos2(φy-θ'y)
=2Mcos(φy-θ'y) ・・・ (4)
となる。
【0046】
位相シフター25の位相シフト量Mは、可動ミラー部251の移動軸に沿う方向の移動量を示し、例えば位相シフター25の駆動ステージ253にリニアエンコーダ等の移動量検出器255(図2参照)を設けることにより該検出器255の検出値から求めることができる。従って、本実施例では移動量検出器255が移動量検出部に相当する。
【0047】
なお、式(4)は画角θx=0の輝点からの入射光の位相差Lであるが、画角θx≠0の輝点からの入射光の場合は、図10に示すように、予め定義したxz平面に対して画角θxだけ傾いたxz平面を考えれば良い。この場合は、上述の校正光学座標系を使って求めた位相差は、実際のxz平面における位相差Lを、予め定義したxy平面に投影した長さとなる。つまり、実際の位相差Lは、校正光学座標系で求めた位相差をcosθxで除算したものとなり、下記式(5)で表すことができる。
L={2Mcos(φy-θ'y)}/cos(θx) ・・・ (5)
式(5)より、位相シフター25の設置角φyが求まれば、位相シフト量Mから、画角θx及びθyに応じた位相差量Lが算出可能となることが分かる。
【0048】
逆に、位相シフト量M、位相差量L、輝点の画角、画角θx及びθyが分かれば上記した式(5)から位相シフター25の設置角φyを求めることができる。ただし、式(5)から設置角φyを求めることができるのは、上述したように法線を含む面をxz平面とする校正光学座標系を定義できることが前提となる。実験的に求めることができるデータは結像面上の離散干渉像の分光特性のみであり、法線は視認できない。そこで、結像面上の複数の離散干渉像の中の一つを通る軸をz軸と定義し、画角θx=0、θy=0として設置角φyを算出する。この画角は干渉像の画角であるが、反射の法則より位相シフター25に対する入射角と反射角は同じであることから、図11に示すように、反射光線と法線を含む面をxz平面とした場合には、離散干渉像の画角と離散輝点像の画角は同じになる。
【0049】
以下、位相シフター25の設置角φyを算出する手順について説明する。
位相シフター25を移動させると、結像面上では位相シフター25の位相シフト量Mに従って干渉像の結像強度が変化する。例えば図12(a)に破線で示すグラフP0は、画角θx=0、θy=0、設置角φy=0のときの波長λの結像強度変化を示している。グラフP0では、結像強度変化1周期分が波長λとなる。これを理論値とする。それに対して画角及び設置角が理論値以外のときの波長λの結像強度変化は実線で示すグラフP1となり、理論値とは異なる周期で結像強度が変化する。これは、画角に応じて1周期に対する波面に与えられる位相差Lの移動軸が位相シフター25の機械的な移動軸に対して傾いていることから、実質的に波面に与えられる位相差量が異なるためである。このときの位相シフト量をMλとすると、画角及び設置角が理論値以外のときは、位相シフト量がMλのときに波長λと等しい位相差Lが与えられたことになる。このMλは、図12(b)に示すように、位相シフトに伴う結像強度変化のデータ(インターフェログラム)をフーリエ変換することにより得られる分光特性から求めることができる。単一波長の光源を用いた場合は、インターフェログラムをフーリエ変換することにより輝線スペクトルが得られ、この輝線スペクトルのピーク値としてMλを求めることができる。
【0050】
そこで、式(5)の位相差量Lに波長λを、位相シフト量Mに実験的に求めたMλを代入することにより、以下に示す設置角φyの算出式(6)を求めることができる。
φy=cos-1(λ/2Mλcosθx)+θ'y ・・・ (6)
【0051】
式(6)では、画角θx及びθyも未知である。しかし、上述したように、結像面上の複数の干渉像の中の1つを選択し、この干渉像を通る軸をz軸と仮定すると、画角θx及びθyはいずれも0となり、波長λ及び位相シフト量Mλが分かれば、式(6)から設置角φyを算出することができる。
【0052】
なお、図13に示すように、法線及びz軸によって構成されるxz平面を法線を中心に回転させる。このとき、位相シフター25の設置角φyが変化しないようにすると、その円の接線が空間座標系(校正光学座標系)のy軸となる。これは、円の接線が、結像面に対するxz平面の射影であるA線(図13参照)、つまり、常に円の中心を通る線に対して垂直となるからである。取得した2次元データは設置角φyの等高線の一部である。従って、複数の離散干渉像の任意の一点をz軸が通ると決定して校正光学座標系を定義することにより、設置角φyを求めることができる。
【0053】
上記のようにして設置角φyを求めることができれば、結像面上の全ての干渉像について、その画角θx、θyと位相シフト量Mから、前述した式(5)を用いて真の位相差Lを求めることができる。この場合の干渉像の画角θx、θyは、図14に示すように、結像レンズの焦点距離と干渉像の形成位置から次の式(7)及び(8)により求めることができる。
θx=tan-1(b/f) ・・・ (7)
θy=tan-1(a/f) ・・・ (8)
ここで、fは結象レンズの焦点距離、aは図14(a)のA軸方向の距離、bはB軸方向の距離を示す。結像面に複数の画素が所定の間隔でm×n配列されたCCDカメラにおいては、その画素の位置からa及びbを求めることができる。従って、前記CCDカメラ(検出部22)及び演算処理部43が本発明の画角検出部を構成する。
【0054】
図15は物体面に形成した離散輝点像を用いて構築した校正光学座標系と画角補正幾何モデルにより測定面(結像面)全体で校正を行った実験結果を示したものである。この実験では、フライアイレンズ(焦点距離:10mm、直径:2.3mm、中心間距離:1.7mm)を用いて離散輝点像を形成し、CCDカメラ(型番:XC-75、画素サイズ:8.4μm(H)×9.8μm(V))上にて光学倍率1/2倍で観察した。また、本実験系の視野範囲は12.9mmである。光源には輝線スペクトルを有するHe-Neレーザ(波長:632.8nm)を用いた。その結果、設置角φyの値は30deg.となった。
【0055】
このように求めた設置角φyを用いて結像面上の全ての干渉像の2次元データから式(5)から位相差Lを求めることで各干渉像の分光特性を校正することができる。図15では、CCDカメラの画素毎、つまり結像面上における干渉像の形成位置と校正前後の分光特性誤差及び校正後の分光特性誤差の関係を示している。図15から、画角が小さいときは校正前と校正後の分光特性の差はほとんどないが、画角が大きくなると校正前と校正後の分光特性の差が大きくなることが分かる。具体的には、例えば画角θx=0.56deg.、θy=-0.92deg.の位置にある干渉像の場合、取得した分光特性の誤差を20.2mmから0.70mmまで最大97%減少した。また、測定面全体でも±3mmの範囲で校正することができた。
【0056】
このように本実施形態によれば、位相シフター25の設置角φyを予め実験的に求め、この設置角φyを用いて画角毎の位相差を算出するようにしたので、分光特性を正しく校正することができる。
【0057】
尚、本発明は上記した実施形態に限らず、本発明の要旨を変更しない範囲で種々の拡張、変形が可能である。
例えば、上記実施形態では離散干渉像の任意の一つについて校正光学座標系を定義して位相シフターの設置角を求めるようにしたが、図13に示すように、求まる設置角が理論的には同じになる複数の離散干渉像についてそれぞれ校正光学座標系を定義して位相シフターの設置角を求め、これらの平均値を用いて画角毎の位相差を求めるようにしても良い。このようにすれば、測定誤差を小さく抑えることができる。
【0058】
また、全ての離散干渉像の結像強度変化から、画角毎に波長及び位相シフターの移動量と位相差量との関係を表すデータテーブルを作成し、このデータテーブルを用いて画角毎に分光特性を校正するようにしても良い。
【0059】
離散輝点はフライアイレンズを用いる他、2次元マトリックス配列された多数の光源を用いて形成することができる。
位相シフターの設置角は、少なくとも一つの干渉像について結像強度変化のデータが分かれば求めることが可能である。従って、校正モードでは、物体面上に1個の輝点を形成し、この輝点に対応する干渉像の分光特性から位相シフターの設置角を求めるようにしても良い。
【符号の説明】
【0060】
10…分光特性測定装置
20…光学系
21…光源
22…検出部
22a…受光面(結像面)
23…フライアイレンズ
24…対物レンズ
25…位相シフター
251…可動ミラー部
252…固定ミラー部
253…駆動ステージ
255…移動量検出器
26…結像レンズ
27…レンズ駆動機構
40…制御装置
41…制御部
43…演算処理部
【特許請求の範囲】
【請求項1】
a) 被測定物の測定点から出射された光を第1反射部と第2反射部に導く分割光学系と、
b) 前記第1及び第2反射部によって反射された光を同一点に導き干渉像を形成する結像光学系と、
c) 前記第1反射部を移動させることにより前記分割光学系から前記第1反射部を経て前記結像光学系に向かう第1反射光と前記分割光学系から前記第2反射部を経て前記結像光学系に向かう第2反射光の間の光路長差を伸縮する光路長差伸縮手段と、
d) 前記第1反射部の移動量を検出する移動量検出部と、
e) 前記干渉像の光強度を検出する、複数の検出素子が2次元配列された光検出部と、
f) 前記光路長差伸縮手段によって前記光路長差を伸縮させることにより前記光検出部で検出される光強度変化に基づき、前記被測定物の測定点のインターフェログラムを求め、このインターフェログラムをフーリエ変換することによりスペクトルを取得する処理部と
を備える分光特性測定装置において、
さらに、画角が既知の輝点から波長が既知の校正光を出射させる校正光出射手段と、
前記光路長差伸縮手段によって前記光路長差を伸縮させることにより前記光検出部で検出される前記輝点の干渉像の光強度変化の1周期に相当する前記第1反射部の移動量と、前記輝点の画角と、前記校正光の波長とに基づき、前記第1反射部の設置角を求める設置角算出部と、
前記被測定物の測定点の画角を求める画角検出部とを備え、
前記処理部は、前記第1反射部の設置角と前記測定点の画角とから、前記第1反射部の移動量に対応する前記光路長差を求め、該光路長差に基づきスペクトルを校正することを特徴とする分光特性測定装置。
【請求項2】
前記設置角算出部が、前記校正光の前記第1反射部への入射点を原点とするxyz座標系であって、前記第1反射部の反射面の法線を含む面をxz平面、該xz平面に垂直な軸をy軸とする校正光学座標系を定義し、当該校正光学座標系における前記設置角φy(ただし、設置角φyは前記第1反射部の反射面の法線の前記y軸回りの回転角を示す。)を以下の式
φy=(90°+θy)+cos-1{(λ/2Mλ)×θx}
(上記式において、θx及びθyは、前記輝点の干渉像の画角であって当該干渉像と前記校正光学座標系の原点とを結ぶ線とx軸及びy軸との角度、λは前記校正光の波長、Mλは前記輝点の干渉像の光強度変化の1周期に相当する前記第1反射部の移動量を示す。)
から算出することを特徴とする請求項1に記載の分光特性測定装置。
【請求項3】
前記設置角算出部は、z軸が前記輝点の干渉像と原点とを結ぶ線となる前記校正光学座標系における前記設置角φyを算出することを特徴とする請求項2に記載の分光特性測定装置。
前記設置角算出部は、前記輝点の画角θx及びθyをそれぞれθx=0及びθy=0として前記設置角φyを算出することを
【請求項4】
前記処理部は、前記光路長差Lを、以下の式
L={2Mcos(φy-θ1'y)}/cos(θ1x) (ただし、θ1'y=θ1y+90°)
(上記式において、θ1x及びθ1yは前記測定点の画角、Mは前記第1反射部の移動量を示す。)
から算出することを特徴とする請求項2又は3に記載の分光特性測定装置。
【請求項5】
校正光出射手段が、波長が既知の単色光源発せられた光をフライアイレンズに入射させることにより複数の離散輝点を形成することを特徴とする請求項1〜4のいずれかに記載の分光特性測定装置。
【請求項6】
a) 被測定物の測定点から出射された光を第1反射部と第2反射部に導く分割光学系と、
b) 前記第1及び第2反射部によって反射された光を同一点に導き干渉像を形成する結像光学系と、
c) 前記第1反射部を移動させることにより前記分割光学系から前記第1反射部を経て前記結像光学系に向かう第1反射光と前記分割光学系から前記第2反射部を経て前記結像光学系に向かう第2反射光の間の光路長差を伸縮する光路長差伸縮手段と、
d) 前記第1反射部の移動量を検出する移動量検出部と、
e) 前記干渉像の光強度を検出する、複数の検出素子が2次元配列された光検出部と、
f) 前記光路長差伸縮手段によって前記光路長差を伸縮させることにより前記光検出部で検出される光強度変化に基づき、前記被測定物の測定点のインターフェログラムを求め、このインターフェログラムをフーリエ変換することによりスペクトルを取得する処理部と、
前記被測定物の測定点の画角を求める画角検出部と
を備える分光特性測定装置において、
画角が既知の輝点から出射された波長が既知の校正光を前記分割光学系に入射させ、そのとき前記結像光学系によって形成される干渉像の光強度変化1周期に相当する前記第1反射部の移動量を前記移動量検出部から取得し、
当該第1反射部の移動量と、前記輝点の画角と、前記校正光の波長とに基づき、前記第1反射部の設置角を求め、
前記第1反射部の設置角と前記測定点の画角とから、前記第1反射部の移動量に対応する前記光路長差を求め、該光路長差に基づきスペクトルを校正することを特徴とする分光特性測定装置の校正方法。
【請求項7】
前記第1反射部の設置角が、前記校正光の前記第1反射部への入射点を原点とするxyz座標系であって、前記第1反射部の反射面の法線を含む面をxz平面、該xz平面に垂直な軸をy軸とする校正光学座標系における前記設置角φy(ただし、設置角φyは前記第1反射部の反射面の法線の前記y軸回りの回転角を示す。)であり、当該設置角φyを以下の式
φy=(90°+θy)+cos-1{(λ/2Mλ)×θx}
(上記式において、θx及びθyは、前記輝点の干渉像の画角であって当該干渉像と前記校正光学座標系の原点とを結ぶ線とx軸及びy軸との角度、λは前記校正光の波長、Mλは前記輝点の干渉像の光強度変化の1周期に相当する前記第1反射部の移動量を示す。)
から算出することを特徴とする請求項6に記載の分光特性測定装置の校正方法。
【請求項8】
前記校正光学座標系は、そのz軸が前記輝点の干渉像と原点とを結ぶ線であることを特徴とする請求項7に記載の分光特性測定装置の校正方法。
【請求項9】
前記光路長差Lは、以下の式
L={2Mcos(φy-θ1'y)}/cos(θ1x) (ただし、θ1'y=θ1y+90°)
(上記式において、θ1x及びθ1yは前記測定点の画角、Mは前記第1反射部の移動量を示す。)
から算出することを特徴とする請求項7又は8に記載の分光特性測定装置の校正方法。
【請求項1】
a) 被測定物の測定点から出射された光を第1反射部と第2反射部に導く分割光学系と、
b) 前記第1及び第2反射部によって反射された光を同一点に導き干渉像を形成する結像光学系と、
c) 前記第1反射部を移動させることにより前記分割光学系から前記第1反射部を経て前記結像光学系に向かう第1反射光と前記分割光学系から前記第2反射部を経て前記結像光学系に向かう第2反射光の間の光路長差を伸縮する光路長差伸縮手段と、
d) 前記第1反射部の移動量を検出する移動量検出部と、
e) 前記干渉像の光強度を検出する、複数の検出素子が2次元配列された光検出部と、
f) 前記光路長差伸縮手段によって前記光路長差を伸縮させることにより前記光検出部で検出される光強度変化に基づき、前記被測定物の測定点のインターフェログラムを求め、このインターフェログラムをフーリエ変換することによりスペクトルを取得する処理部と
を備える分光特性測定装置において、
さらに、画角が既知の輝点から波長が既知の校正光を出射させる校正光出射手段と、
前記光路長差伸縮手段によって前記光路長差を伸縮させることにより前記光検出部で検出される前記輝点の干渉像の光強度変化の1周期に相当する前記第1反射部の移動量と、前記輝点の画角と、前記校正光の波長とに基づき、前記第1反射部の設置角を求める設置角算出部と、
前記被測定物の測定点の画角を求める画角検出部とを備え、
前記処理部は、前記第1反射部の設置角と前記測定点の画角とから、前記第1反射部の移動量に対応する前記光路長差を求め、該光路長差に基づきスペクトルを校正することを特徴とする分光特性測定装置。
【請求項2】
前記設置角算出部が、前記校正光の前記第1反射部への入射点を原点とするxyz座標系であって、前記第1反射部の反射面の法線を含む面をxz平面、該xz平面に垂直な軸をy軸とする校正光学座標系を定義し、当該校正光学座標系における前記設置角φy(ただし、設置角φyは前記第1反射部の反射面の法線の前記y軸回りの回転角を示す。)を以下の式
φy=(90°+θy)+cos-1{(λ/2Mλ)×θx}
(上記式において、θx及びθyは、前記輝点の干渉像の画角であって当該干渉像と前記校正光学座標系の原点とを結ぶ線とx軸及びy軸との角度、λは前記校正光の波長、Mλは前記輝点の干渉像の光強度変化の1周期に相当する前記第1反射部の移動量を示す。)
から算出することを特徴とする請求項1に記載の分光特性測定装置。
【請求項3】
前記設置角算出部は、z軸が前記輝点の干渉像と原点とを結ぶ線となる前記校正光学座標系における前記設置角φyを算出することを特徴とする請求項2に記載の分光特性測定装置。
前記設置角算出部は、前記輝点の画角θx及びθyをそれぞれθx=0及びθy=0として前記設置角φyを算出することを
【請求項4】
前記処理部は、前記光路長差Lを、以下の式
L={2Mcos(φy-θ1'y)}/cos(θ1x) (ただし、θ1'y=θ1y+90°)
(上記式において、θ1x及びθ1yは前記測定点の画角、Mは前記第1反射部の移動量を示す。)
から算出することを特徴とする請求項2又は3に記載の分光特性測定装置。
【請求項5】
校正光出射手段が、波長が既知の単色光源発せられた光をフライアイレンズに入射させることにより複数の離散輝点を形成することを特徴とする請求項1〜4のいずれかに記載の分光特性測定装置。
【請求項6】
a) 被測定物の測定点から出射された光を第1反射部と第2反射部に導く分割光学系と、
b) 前記第1及び第2反射部によって反射された光を同一点に導き干渉像を形成する結像光学系と、
c) 前記第1反射部を移動させることにより前記分割光学系から前記第1反射部を経て前記結像光学系に向かう第1反射光と前記分割光学系から前記第2反射部を経て前記結像光学系に向かう第2反射光の間の光路長差を伸縮する光路長差伸縮手段と、
d) 前記第1反射部の移動量を検出する移動量検出部と、
e) 前記干渉像の光強度を検出する、複数の検出素子が2次元配列された光検出部と、
f) 前記光路長差伸縮手段によって前記光路長差を伸縮させることにより前記光検出部で検出される光強度変化に基づき、前記被測定物の測定点のインターフェログラムを求め、このインターフェログラムをフーリエ変換することによりスペクトルを取得する処理部と、
前記被測定物の測定点の画角を求める画角検出部と
を備える分光特性測定装置において、
画角が既知の輝点から出射された波長が既知の校正光を前記分割光学系に入射させ、そのとき前記結像光学系によって形成される干渉像の光強度変化1周期に相当する前記第1反射部の移動量を前記移動量検出部から取得し、
当該第1反射部の移動量と、前記輝点の画角と、前記校正光の波長とに基づき、前記第1反射部の設置角を求め、
前記第1反射部の設置角と前記測定点の画角とから、前記第1反射部の移動量に対応する前記光路長差を求め、該光路長差に基づきスペクトルを校正することを特徴とする分光特性測定装置の校正方法。
【請求項7】
前記第1反射部の設置角が、前記校正光の前記第1反射部への入射点を原点とするxyz座標系であって、前記第1反射部の反射面の法線を含む面をxz平面、該xz平面に垂直な軸をy軸とする校正光学座標系における前記設置角φy(ただし、設置角φyは前記第1反射部の反射面の法線の前記y軸回りの回転角を示す。)であり、当該設置角φyを以下の式
φy=(90°+θy)+cos-1{(λ/2Mλ)×θx}
(上記式において、θx及びθyは、前記輝点の干渉像の画角であって当該干渉像と前記校正光学座標系の原点とを結ぶ線とx軸及びy軸との角度、λは前記校正光の波長、Mλは前記輝点の干渉像の光強度変化の1周期に相当する前記第1反射部の移動量を示す。)
から算出することを特徴とする請求項6に記載の分光特性測定装置の校正方法。
【請求項8】
前記校正光学座標系は、そのz軸が前記輝点の干渉像と原点とを結ぶ線であることを特徴とする請求項7に記載の分光特性測定装置の校正方法。
【請求項9】
前記光路長差Lは、以下の式
L={2Mcos(φy-θ1'y)}/cos(θ1x) (ただし、θ1'y=θ1y+90°)
(上記式において、θ1x及びθ1yは前記測定点の画角、Mは前記第1反射部の移動量を示す。)
から算出することを特徴とする請求項7又は8に記載の分光特性測定装置の校正方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2012−181060(P2012−181060A)
【公開日】平成24年9月20日(2012.9.20)
【国際特許分類】
【出願番号】特願2011−43171(P2011−43171)
【出願日】平成23年2月28日(2011.2.28)
【出願人】(304028346)国立大学法人 香川大学 (285)
【Fターム(参考)】
【公開日】平成24年9月20日(2012.9.20)
【国際特許分類】
【出願日】平成23年2月28日(2011.2.28)
【出願人】(304028346)国立大学法人 香川大学 (285)
【Fターム(参考)】
[ Back to top ]