
分娩進行を監視するための方法及び装置
本発明は、位置センサを用いて母体上の所定の点を計測し、位置センサの3次元空間位置を監視し、母体上の所定の点を基準とした胎児先進部の位置を監視することによって、出産中の母体の分娩進行を監視する方法を提供する。胎児先進部の位置は、類似の位置センサまたは画像診断によって表示され得る。他の状態、例えば展退度、頸管開大度、頸管の位置姿勢なども、同じように監視され得る。基準点または取着点は、例えばキーまたは成形された物体を胎児または母体上の1若しくは複数の点に取り付けることによって、位置センサに与えられ得る。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、出産中の分娩進行を監視するための方法及び装置に関する。
【背景技術】
【0002】
正常分娩は通常、分娩第1期から第3期までの3つの段階に分けられる。分娩第1期は陣痛発来から子宮口の全開大まで、第2期は子宮頸管の全開大から胎児の娩出まで、第3期は胎児の娩出後から胎盤の娩出までの期間である。分娩中には、児の心拍数を記録する外部超音波システム及び母体の子宮収縮を検出する外部システムか、児頭に取り付けられた電極によって児の心脈を検出しかつ母体の子宮内に挿入されたカテーテルによって母体の子宮収縮を検出する電子システムかいずれかを用いるのが一般的である。
【0003】
しかしながら、分娩進行を判定するために、分娩中に他の多数の母児の生理的状態を監視することも可能である。そのような状態としては、(1)展退(分娩第1期及びそれ以前に子宮頸管が薄く伸びること)、(2)頸管の開大(子宮口の大きさが増大すること)、(3)頸管の位置姿勢(膣軸、通常は児頭、と頸管との位置関係)、(4)下降度(station)(母体の骨盤に対して胎児先進部の所定の点がどこまで下降しているかのレベル)、(5)骨盤と児頭との関係を示す胎向、(6)子宮口に胎児のどの部分があるかを示す胎位(例えば額位、顔位、または骨盤位)がある。
【0004】
下降度は、より一般的には、医師によって触知可能であるような両坐骨棘と児頭先端部との距離で決定されるが、より正確には、母体の骨盤入口部と児頭大横径(BPD)との距離として定義される。
【0005】
上記の状態は、通常は理学的検査によって、例えば母体の膣から指を挿入して触診することによって、判定される。しかしながら、そのような「指」診の精度は非常に主観的であり、医師の経験、判断と、内診指の大きさにも大きく依存する。このような理学的検査の欠点は他にもあり、例えば、間隔を空けて行われる場合があること、一般的には母体に不快感を与えること、そして、汚染、感染、胎児モニタのずれ(dislodgment)、児の損傷などを含む多くのリスクをはらんでいることが挙げられる。理学的検査から分娩進行の正確な段階を判定できなければ、児や母体が傷付けられるか場合によっては死亡することもある。
【0006】
これらの状態を自動的に監視するために多くの装置が過去にも提唱されてきた。例を挙げると、特許文献1は、分娩中に頸管開大度を監視するために長さ方向に沿って離隔した電極を有する長寸のチューブを提唱し、特許文献2及び特許文献3は、心拍動を監視するために児頭に取り付けられるような、下降経過を監視するために較正された胎児監視プローブを提唱し、特許文献4は、胎児の位置及び頸管の状態を監視するための長寸の可膨張性サックを提唱し、特許文献5は、頸管の状態を監視するためのペッサリーを提唱している。しかしながら、なんらかの理由により、以前に提唱された装置のいずれもが広範に使用されることはなく、長い歴史を持つ「指」診が今日まで一般的に利用され続けている。
【0007】
最近の研究(Sherer et al., Ultrasound Obstet Gynecol 2002 Mar 19 (3):258-68)は、児頭位置の経腟指診は第1期の活動期(active labor)及び分娩第2期においてエラー発生率が高いこと(それぞれ75%、65%)を実証した。下降度または児頭位置の評価が不正確であれば、児頭が高すぎて産道を通過できずにいる時に鉗子または吸引分娩器を使用する決断を下すことにもなり、帝王切開術が必要になった時にその実施が遅れることにもなりかねない。いずれの場合にも、最終的に、胎児にとっては致命的であり母体には大きなダメージを与える結果となることがある。
【0008】
更に、「指診(指による内診)」は、感染を引き起こすことがあり、早期破水の場合には禁止されている。指診はまた、特にピーク時には、分娩室スタッフに大きな作業負荷を課す。更に、指診は間欠的に行われるので、分娩進行の動向及び急激な変化が見逃されることがあり、潜在的に誤った決断を下しかねない。また、指診を複数回行うと炎症のリスクが増す。
【0009】
従って、分娩進行に関する正確な情報を提供する装置及び方法が必要である。
【0010】
【特許文献1】米国特許第4,476,871号
【特許文献2】米国特許第4,942,882号
【特許文献3】米国特許第5,135,006号
【特許文献4】米国特許第5,222,485号
【特許文献5】米国特許第5,406,961号
【特許文献6】米国特許第4,945,305号
【発明の開示】
【発明が解決しようとする課題】
【0011】
本発明のある側面によれば、出産中の分娩進行を監視する方法であって、母体骨盤上の所定の点に位置センサを装着する過程と、ある基準に対する位置センサの3次元空間位置を監視する過程と、母体骨盤上の所定の点に対する胎児先進部の位置を監視して分娩進行の指標を与える過程と、頸管にセンサを装着することによって頸管開大度を計測する過程とを含む方法を提供する。
【0012】
本発明の別の実施形態では、出産中に母体の分娩進行を非継続的に監視する方法であって、プローブまたは指装着型センサを用いて、母体骨盤上の所定の点に対する胎児先進部を計測し、かつ例えば頸管上のある2点に接触することによって頸管開大度を計測する過程を含む方法を提供する。
【0013】
本発明の種々の実施形態について、例示のために後述する。ある実施形態では、胎児先進部の位置と、母体の子宮頸管端部の両側部の位置とが、これらのそれぞれの要素に取り付けられた位置センサによって監視される。第2の実施形態では、後者は、ハンドヘルドプローブまたは指装着型センサを用いて非継続的に監視される。第3の実施形態では、後者は、超音波トランスデューサを作動させて母体の頸管及び骨盤と児頭とを表示画面に映し出し、かつ、超音波トランスデューサ上の位置センサと表示画面をマーキングするためのマーカとを用いてこれらの要素の位置を配置することによって監視される。第4の実施形態は、少なくとも2つのセンサを利用する。1つのセンサは、骨盤上の骨の位置に装着されて基準点として働き、他のセンサは、先ず体外から骨盤をマッピングし、超音波プローブに取り付けることによってBPD図(BPD plan)をマッピングし、体内から坐骨棘及び坐骨結節をマッピングし、次に頸管及び胎児先進部に装着されるように用いられ得る。
【0014】
本発明の更なる実施形態では、前上腸骨棘、恥骨結合、1〜3レベルの仙骨、坐骨棘及び坐骨結節にも位置センサが装着され得るか或いはその位置座標が得られる。そしてそのような位置は、骨盤入口部、出口部及び骨盤中央部(midpelvis)をマッピングするために用いられ得る。そのようなマッピングまたは骨盤計測は、児頭が産道を通過するのに適切な大きさであるかを判定するのに役立ち得る。
【0015】
実施形態に記載されている更なる機能によれば、頸管端部の両側部に装着された位置センサの位置を監視しかつその間の空間距離を継続的に表示することによって、母体の頸管の頸管開大度が継続的に表示される。胎児先進部(例えば児頭)の胎向もまた、それらのそれぞれの位置を監視及び表示することによって継続的に示される。
【0016】
第2の実施形態では、プローブまたは指装着型センサを頸管の各側部と児頭上のまたは児頭に接続された所定の点とに接触させることによって、母体の頸管の頸管開大度及び胎児先進部の胎向またはBPDが非継続ベースで監視される。
【0017】
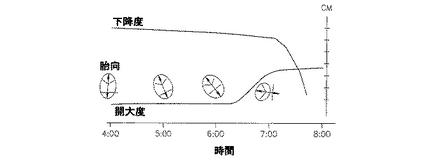
実施形態に記載されている更なる機能によれば、上記の状態は、計算され、距離の単位(たとえばcm)の形式及び/またはグラフの形式で表示される。グラフは、頸管開大度と胎児先進部の下降との相互関係を示すもので、パルトグラムと呼ばれることもある。その上、そのような表示部は、産道内の胎児の画像や、骨盤入口部、出口部及び骨盤中央部に対する児頭の経時的な関係及び方向を含み得る。図4−Bは、本発明のある実施形態に基づき、種々の分娩段階における先進部の胎向の表示を示す。他の方法を用いてそのような情報の表示を行なってもよい。
【0018】
本発明の更なる実施形態に基づき、出産中に母体における分娩進行を監視するための装置が提供される。この装置は、少なくとも2つのセンサを含み、1つのセンサは、骨盤8上の骨の位置に装着されて基準点として働き、他のセンサは、先ず体外から骨盤をマッピングし、超音波プローブに取り付けることによってBPD図をマッピングし、体内から坐骨棘及び坐骨結節をマッピングし、次に胎児先進部に装着されるように用いられることができ、頸管の両側部に装着されることができる。
【0019】
出力装置は、好適にはディスプレイであるが、コンピュータによって出力されるデータを表示、記録及び/または処理するための作図装置、記録装置、または他の装置であり得る。
【0020】
以下に特に詳述されるように、そのような方法及び装置は、継続的または定期的のいずれかで、分娩進行の監視を可能にする。そのような方法及び装置は、従来の「指診」に見られたような、経験、判断、及び内診指の大きさに基づく精度にはあまり左右されず、母体に与える不快感が少なく、また、汚染、感染、胎児モニタのずれ、或いは胎向または分娩進行の誤った評価に起因する児または母体の損傷または死亡のリスクが少ない。更に、この技術は、クリティカルな状態即ち骨盤入口部に対する児頭BPDの空間距離の変化をより正確に監視することを可能にする。
【0021】
本発明の更なる機能及び利点については、以下の記載から明らかになるであろう。
【発明を実施するための最良の形態】
【0022】
これより先の記載において、本発明の種々の側面を記述する。説明を分かり易くするため、本発明が十分に理解できるように特定の形態及び詳細について示されている。しかしながら、本明細書中に記載されている特定の詳細な説明がなくとも本発明を実施し得ることは、当業者であれば理解できよう。更に、本発明が不明瞭にならないように、公知の機能については省略するかまたは簡単な記載に留めた箇所がある。
【0023】
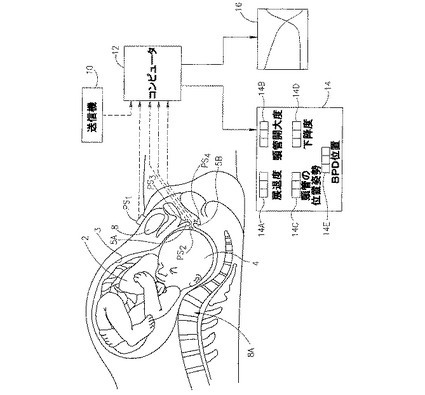
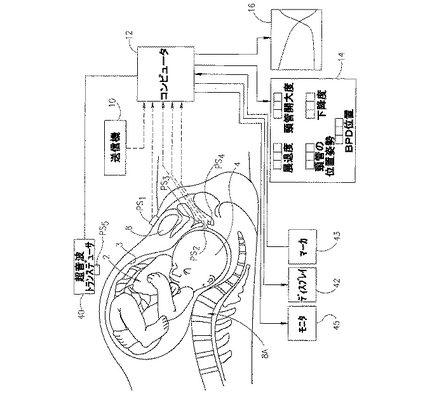
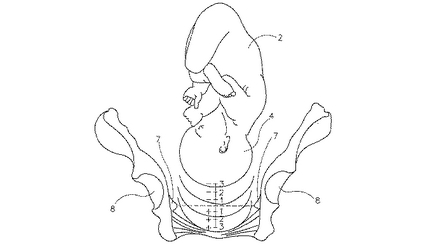
先ず、図1を参照されたい。図1は、分娩中の母体の子宮と、分娩進行を監視するシステムとを模式的に例示したものである。コンピュータ12(例えば、パーソナルコンピュータ、ワークステーション、または「コンピュータ・オン・チップ(computer on a chip)」を含む専用装置などであり得る)は、とりわけ、表示部14や16などの表示を例えばモニタに出力する。ここに示した表示部以外のものが用いられてもよい。コンピュータ12は、例えば送信機10及びセンサPSに動作可能に接続される。送信機10は、用いられなくてもよい。コンピュータ12は、通常、適切なソフトウエア及び1若しくは複数の適切な処理装置を含む。図1は、子宮3内で典型的な胎向即ち子宮頸管5からの出産に備えて児頭4を下にした姿勢をとっている胎児2を示す。頸管5は、胎児が子宮頸管及び膣腔を通過するのに備えて開大及び展退する。娩出中の児頭下降の種々の段階は、例えば両坐骨棘または骨盤8の骨盤入口部8aに対して計測され得る。
【0024】
分娩進行の監視は、例えば、母体の子宮及び骨盤の種々の部分と児頭とに装着された1組の位置センサによって行われる。第1の位置センサPS1は、例えば、両坐骨棘及び骨盤入口部8aからの基準点として骨盤8の1つに装着され得る。第2の位置センサPS2は、児頭4(児頭でなければ他の典型的な胎児先進部)に装着され得る。第3の位置センサPS3及び第4の位置センサPS4は、例えば、外子宮口の2つの端部の両側部5A及び5Bに装着され得る。センサ装着位置は、図示されている位置と異なってもよい。
【0025】
別の実施形態では、位置センサPS2は、例えば当該分野で公知でありかつ胎児の生命徴候を監視するのに一般的に用いられるような胎児頭皮用電極に装着されるかその一部をなし得る。例えば、位置センサPS2は、フックで胎児に取り付けられるようなコープランド(Copeland)頭皮用電極、或いは、例えば、ねじ、ばね、スパイラルなどで胎児先進部に取り付けられるような胎児頭皮用電極に装着されるかその一部をなし得る。
【0026】
別の実施形態では、位置センサPS2は、他の方法、例えば、吸盤、テープ、または他の接着剤などによって胎児先進部に装着され得る。
【0027】
コンピュータまたはモニタ(例えば図5のコンピュータ12、後述)は、骨盤の動きを追跡することができ、従って、骨盤全体、特に骨盤入口部、出口部及び骨盤中央部の空間位置を監視できる。
【0028】
ある実施形態では、位置センサPS1〜PS4は、任意の適切な様式で(例えば、クリップ、吸盤、または他の接着剤などによって)それぞれの表面に固定され得る。各位置センサは、通常、ある基準に対してその正確な3次元空間位置及び方向を検出することが可能であるが、これについては後述する。位置センサは、一端がそれぞれの表面にクリップ留めされるような剛性ロッドまたは物体または他の支持体の他端に設けられることができる。
【0029】
本発明の別の実施形態では、分娩進行は、ハンドヘルドプローブに装着された位置センサ、指貫(thimble)に装着された位置センサ、または他の指装着型位置センサによって、非連続ベースで監視される。ある実施形態では、プローブの操作はユーザの指を用いて行われ、指には位置センサが装着されている。プローブは、胎児及び母体上の種々の点に接触させられる。プローブは、例えばロッドまたは他の剛性物体に設けられることもある。
【0030】
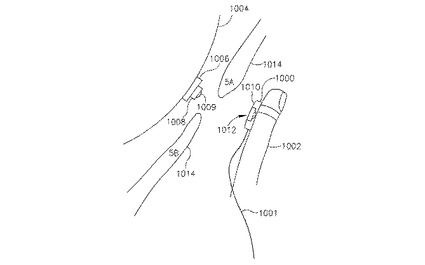
ここで、図10−Aを参照されたい。図10−Aは、本発明のある実施形態に基づく位置プローブまたは指装着型センサ1000の模式図である。例えば指貫形状の位置プローブまたは指装着型センサ1000は、検査を行なう医者または医師の指1002の先端部に適合し得る。そのようなセンサを保持するための他の形状及び嵌合、例えば指輪や手袋なども可能である。導線またはワイヤ1001は、指装着型センサを、コンピュータ、処理装置、または胎児監視ステーションに動作可能に接続する。或いは、動作可能な接続は、ワイヤレス電子データリンクによるものでもよい。センサ1000は、本明細書中に記載されているプローブPSと同様に作動し、同様の方法で用いられかつシステムに組み込まれることができる。
【0031】
図10−Aには、胎児先進部1004も示されている。胎児先進部1004は、例えば頭または他の部分であって、ここに胎児頭皮方向ガイド1006が取り付けられている。胎児頭皮方向ガイド1006は、適切な電極、ワイヤ、または伝送装置(例えば心拍数情報を伝送するためのもの)を含んでもよいし含まなくてもよい。胎児頭皮方向ガイド1006は、任意の適切な方法で(例えば、クリップ、吸盤、または他の接着剤などによって)胎児先進部の表面に固定され得る。胎児頭皮方向ガイド1006は、例えば、胎児の生命徴候を監視するのに一般的に用いられるような胎児頭皮用電極に取り付けられるか、これを含むか、或いはその一部をなすことができるが、そのような装置に関連するものでなくともよい。胎児頭皮方向ガイド1006は通常、位置プローブとの接触のための基準点または取着点(affixation point)を提供し、更に、通常は位置プローブと適切に接触して位置プローブ(対応キー部分を含む)を胎児頭皮方向ガイド1006に対してある一定の向きに方向付けするようなキー部分またはキー形状を与えることによって、位置プローブのための方向ガイドも提供する。頭皮方向ガイド1006は、適切な方法で胎児に取着される。
【0032】
指装着型センサ1000の先端部1010は、通常胎児頭皮方向ガイド1006の外面側1008に配置された1若しくは複数の凹部1009の形状に適合しかつ対応(マッチング)するような1若しくは複数の通常非対称的に形成された突部1012に適合され得る。凹部1009及び突部1012は、それぞれ、他方の部分に対応するようなキー部分を形成する。突部1012と凹部1009の箇所は、他の実施形態では、指装着型センサ1000の先端部1010と胎児頭皮方向ガイド1006の外面側1008となっていることもある。突部1012及び凹部の形状及び数は、図示されているものと異なってもよい。「突部」即ちキー部分は、電極の表面から突出しなくてもよい。例えば「突部」は、対応するキー部分をそこに挿入し得るか或いはそのようなキー部分に対応し得るような凹部であってもよい。ワイヤは必ずしも用いられる必要がなく、位置プローブは後述するようなワイヤレス方法に基づき作動し得る。
【0033】
本発明のある実施形態では、使用時に、プローブまたは指装着型センサ1000を、例えば児頭1004(または胎児の他の先進部)や母体上の1組の点(1組は1つの要素を含み得る)に接触させることができる。通常はセンサ1000を子宮頸管1014の外子宮口の各側部に接触させるが、母体の他の部分に接触させてもよい。子宮頸管1014の外子宮口の各側は、基準点または取着点及び方向点を与えるためのキー装置またはガイドを含むこともあるが、通常、そのような装置は母体に必要ない。もしそのような装置が用いられるのであれば、その形状はガイド1006に類似したものになるであろう。
【0034】
ある実施形態では、指装着型センサ1000などのセンサを胎児先進点1004または頸管に接触させたときにそのような点の位置の計算が開始するように、センサはタッチセンシティブであり得る。別の実施形態では、医師は、児頭などの指定された点に指装着型センサ1000を接触させることができ、コンピュータまたは監視装置に示すことによって位置捕捉を開始することができる。例えば、ユーザは、そのような位置センサに動作可能に接続されているような、マウスをクリックしたり、キーボード、フットパッドまたは他のスイッチを操作したりして、ユーザの意思表示を与えかつそれぞれの点の位置の計算を開始することができる。図示されているものと異なる基準点または取着点が用いられてもよい。例えば母体の子宮頸管の両端5A、5B(または他の点)に対する被接触胎児先進点1004の相対位置を計算することによって、分娩進行の予測が可能になる。
【0035】
ある実施形態では、例えば骨盤に対する被接触点の幾何学的配置の必要な精度を確立するために、指装着型センサ1000を胎児先進部1004上の点に接触させることによりもたらされる情報以上の情報を収集することが望ましい。従って、胎児先進部の位置を計算するために、センサ1000を胎児先進部1004に接触させる方向を固定することが望ましいであろう。
【0036】
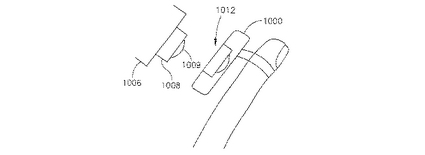
次に、図10−Bを参照されたい。図10−Bは、本発明のある実施形態に基づき、指装着型センサ1000上の非対称凹部/突部1012と、対応する胎児頭皮方向ガイド1006上の突部1008の拡大図である。突部1012及び1008は、通常、接触時に相対的な位置及び方向を固定するためのキーシステムを提供する。センサ1000と胎児頭皮方向ガイド1006とが接触する方向を固定するには、例えば、センサ1000の位置を計算する時点で(例えば、上述したようなマウスクリック時に)センサ1000の先端部1010の突部1012が胎児頭皮方向ガイド1006の外面側上の凹部1009に嵌合することを必要条件とすることができる。通常、突部は、センサ1000と方向ガイド1006とが完全に接触しているときにこれらが相互に特定の相対的な幾何学的配置(方向)を有するように形成される。
【0037】
或いは、センサ1000と胎児先進部1004とが接触する方向は、例えば、胎児先進部1004上または胎児頭皮方向ガイド1006上の幾つか(通常は3つであるが、他の数でもよい)の指定点との接触によって決定され得る。そのような指定点は、例えば、大泉門及び/または小泉門など児頭上の解剖学的標識のうち任意の3つのものであるか、胎児先進部1004に取り付けられた3つのステッカーまたはマーカであり得る。
【0038】
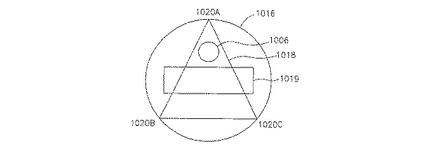
図10−Cを参照すると、本発明のある実施形態に基づくキャップまたはカバー1016が示されている。これは、胎児頭皮方向ガイド1006に取り付けられることができ、ここには非対称的に形成された形1018がエッチングされるか或いは取り付けられている。他の適切な形、しるし、または形状が用いられてもよい。胎児先進部1004に対してセンサ1000を接触させる方向の確立は、例えば、センサ1000を非対称的に形成された形1018上の幾つか(通常は3つであるが、他の数でもよい)の点に接触させることによって達成され得る。そのような3つの点は、例えば、胎児頭皮方向ガイド1006に取着またはエッチングされ得るような非二等辺三角形を形成する点1020A、1020B及び1020Cであり得る。他の形状が用いられることもある。ある実施形態では、キャップは省略され得る。ある実施形態では、胎児頭皮方向ガイド1006に直接、または胎児に装着された他のセンサに、非対称形状の形1018がエッチングされるか或いは取り付けられ得る。
【0039】
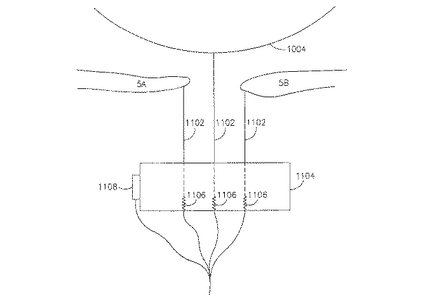
別の実施形態では、頸管の2つの端部5A、5Bと胎児先進部1004の各々に長さが既知である幾つか(通常は3つであるが、他の数でもよい)の剛性部材の第1の端部が取り付けられ得る。そのような各剛性部材の第2の端部は、例えば位置センサに取り付けられ得る。センサの位置は、頸管または胎児先進部の位置及び方向によって変わる。別の実施形態では、そのような剛性部材の第2の端部は、体外にあるレセプタクルに回転可能かつ移動可能に接続され得る。ここで、図11を参照すると、剛性部材1102が図示されている。剛性部材1102の第1の端部は、本発明のある実施形態に基づき、例えば頸管5A、5B及び胎児先進部1004に取り付けられ得る。他の適切な取付点及び他の部材数が用いられてもよい。そのような剛性部材1102の第2の端部は、例えばそのような部材1102の動き及び方向を計測するレセプタクル1104に、移動可能に挿入される。部材1102のそのような動きは、頸管5A、5Bの開大度及び展退度と、胎児先進部1004の下降度及び胎向とを反映し、例えばレセプタクル1104内に配置されかつ各剛性部材1102に取り付けられた電子的、機械的、または光学的読取装置による記録が可能である。レセプタクル1104はまた、レセプタクル1104の位置に対する剛性部材の位置がわかるように、レセプタクル1104の方向の基準点として位置センサを有し得る。
【0040】
位置センサは、例えば、磁気式、超音波式、機械式、慣性式、光ファイバ式、または他の既知の位置センサであってよい。この目的のための多くの種類の位置センサが知られている。図示されている例では、位置センサPS1〜PS4及びセンサ1000は、例えば特許文献6に記載されているような、磁界式センサである。他の位置センサ、及びセンサから位置を計算する他の方法が用いられてもよい。位置センサPSまたはセンサ1000は、例えば送信機10(図1)によって作動されたときに例えば信号を出力することができる。このことは、位置センサの出力と送信機10によって送信される信号とを受信するべく接続されたコンピュータ12(図1)によるセンサの正確な位置の計算を可能にする。コンピュータ12は、各センサ1000またはセンサPS1〜PS4の正確な位置及び方向を計算し、それらの計算から、分娩中の母児の種々の生理的状態を表示するための表示部を作成しかつ制御し得る。ここで、表示部は例えば14(図1)、16(図1)として示されているものであり、種々の生理的状態は特に以下のものを指す(その他の状態も示され得る)。
【0041】
1.展退14A:これは、分娩第1期及びそれ以前に子宮頸管が薄く伸びる過程である。頸管は、分娩プロセスのためにより広い空間を確保するべく収縮によって薄く伸ばされる。展退度は、0%(展退なし)から100%(頸管厚さ約0.25cm以下)までパーセンテージで表わされる。図1に示されているシステムでは、展退度は、児頭に装着された位置センサPS2と、子宮頸管5の端部に装着された2つの位置センサPS3、PS4を結ぶ線上の中間点との空間距離として計算され、14aに表示される。種々の点におけるセンサ1000の位置もまた、そのような計算に用いられ得る。他の方法を用いて展退度を定義または提示することもできる。
【0042】
2.頸管開大14B:これは、子宮口の開大である。正期産児の児頭は殆どの場合直径10cmの子宮口を通過することができるので、子宮口の径が10cmになったら全開大になったと考えられる。図1に示されているシステムでは、頸管開大度は、子宮頸管5の両側部に装着された2つの位置センサPS3とPS4との空間距離として計算され、14bに表示される。適切な点におけるセンサ1000の位置もまた、そのような計算のために用いられ得る。他の方法を用いて頸管開大度を定義または提示することもできる。
【0043】
3.頸管の位置姿勢14C:これは、頸管の前傾・後傾である。本願の場合、頸管の中心軸の向き、即ち胎児の先進部に装着された位置センサPS2と、頸管の両側部に装着された2つの位置センサPS3、PS4を結ぶ線上の中間点とを結ぶ線の方向として計測され得る。頸管軸の初期方向は、分娩開始時に得られる。頸管の位置姿勢の経過は、初期方向の角度と所与の時間における頸管軸とのなす相対角度として示される。医師は、任意の角度範囲、例えば「前方」または「中央」または「後方」を指定し得る。或いは、頸管の位置姿勢は、位置センサPS1によって測定されるような恥骨結合と、頸管の両側部に装着された2つの位置センサPS3、PS4を結ぶ線上の中間点との距離として表示され得る。他の方法を用いて頸管の位置を定義または提示することもできる。例えば、種々の点におけるセンサ1000の位置が用いられてもよい。
【0044】
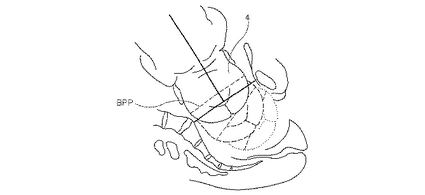
4.下降度14D:これは、母体骨盤の所定の点に対する児頭(または他の先進部)の位置である。前述のように、従来法の下降度は両坐骨棘と児頭先端部との距離である。ある実施形態では、骨盤入口部とBPDとの距離を計測するために、より正確な下降度計測法が用いられ得る。本明細書中に示されているようなシステムでは、下降度の計算及び表示は、図7に示されているような両坐骨棘と児頭先端部との距離に基づく従来の様式で、或いは、図8に示されているような骨盤入口部とBPDとの空間距離に基づくより正確な様式で行われ得る。他の方法を用いてそのような位置を定義または提示することもできる。
【0045】
5.骨盤と児頭の関係を示す胎向と、子宮口に胎児のどの部分があるかを示す胎位(例えば額位、顔位、または骨盤位)。他の方法を用いてそのような胎向を定義または提示することもできる。
【0046】
6.骨盤計測:これは、当該分野で既知であるような、骨盤入口部と骨盤出口部と骨盤中央部の領域及び形状のマッピングまたは計算である。そのようなマッピングの目的は、骨盤入口部、出口部及び骨盤中央部の領域が児の通過に適しているかを判定することであり得る。他の方法を用いてそのような領域及び形状を定義または提示することもできる。
【0047】
本発明は、ある実施形態において、高精度の骨盤計測を得る方法を提供し得る。そのような骨盤計測は、センサを、最初に骨骨盤及び棘の一部または全部に、そしてマッピング段階においては以下の点即ち前上腸骨棘、恥骨結合、外測または経膣により測定可能な1〜3レベルの仙骨、坐骨棘及び坐骨結節の一部または全部に、取り付けるか或いは接触させることによって得ることができる。他の計測領域が用いられてもよい。骨盤計測は、分娩第1期の活動期中、初期分娩の前、または他の任意の時間に、本発明の実施形態によって実施され得る。
【0048】
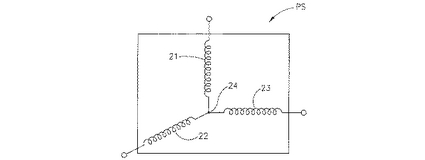
位置センサPS1〜PS4または1000は、種々の既知の型のセンサであり得る。図2は、そのような位置センサPSまたは1000の1つを模式的に示している。これは、例えば、全てが位置センサの中心点24から正確に分かっている距離にあるような幾つか(通常は3つであるが、他の数でもよい)の離間された磁気コイル21、22、23の三角形のアレイを含む。このように、ある基準に対する3つのコイル21〜23の位置及び方向を測定することによって、位置センサPSまたは1000の中心点24の正確な位置がその基準に対して測定され得る。
【0049】
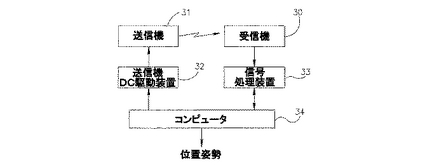
種々の実施形態と共に用いられ得る位置センサシステムの一例が、特許文献6に記載されている。そのようなシステムは、図3のブロック線図に示されているように、パルスDC磁気信号を利用して送信アンテナ31に対する6自由度の受信アンテナ30の位置姿勢(位置及び方向)の正確な計測を可能にする。送信及び受信コンポーネントは、互いに位置及び方向が既知である2つまたはそれ以上の送信アンテナからなる。送信アンテナ31は、DC駆動回路32から(パルス直流信号によって)1つずつ駆動される。受信アンテナ30は、送信された直流磁界及び地球磁界を信号処理回路33において計測し、この情報をコンピュータ34に与える。それによって、コンピュータ34は、受信アンテナ30の位置姿勢を判定する。特許文献6が教示する計算方法は、本発明のシステム及び方法の種々の実施形態と共に用いられることができ、例えばコンピュータ12及び/またはコンピュータ12内のソフトウエアにおいて実施可能であり得る。他の計算方法が用いられてもよい。
【0050】
そのような位置検出システムの構築及び操作については特許文献6に詳述されており、特許文献6は引用を以って本発明の一部となす。本発明の実施形態と共に用いられ得る他の磁界式システムは、例えば、特許文献6の先行技術の項に記述されている特許に記載されているような、交流磁界に基づくものであり得る。
【0051】
位置センサPS1〜PS4または1000に用いられ得る他の位置検出システムは、例えば、米国バーモント州バーリントンのポヒマス社(Polhemus Inc.)製または同アセンション・テクノロジー社(Ascension Technology Corporation)製のものである。そのようなシステムにおいては、例えば3つの相互に垂直な磁界が順に送信され、例えば3つの相互に垂直な方向のコイルが幾つかの磁界を検出するために利用される。複合コイルの空間位置及び方向を計算するために、コンピュータが利用される。
【0052】
位置センサPS1〜PS4または1000に用いられ得る更に別の位置検出システムは、米国マサチューセッツ州ケンブリッジのアダプティブ・オプティクス社(Adaptive Optics Associates, Inc.)製のものである。これは、位置及び方向を検出する対象体に取り付けられた複数の光源と、光源から放射される光を検出するべく既知の空間位置に配置された複数のカメラとを含む。コンピュータは、全てのデータを結合し、対象体の位置及び方向を計算する。
【0053】
位置センサPS1〜PS4または1000に用いられ得る更にもう1つの位置検出システムは、米国コネチカット州ニューヘヴンのサイエンス・アクセサリーズ社(Science Accessories Corporation)製のものである。これは、位置を検出する対象体上の点に取り付けられた超音波源と、超音波源から発せられる音を検出するべく既知の空間位置に配置された複数のマイクロホンとを含む。コンピュータは、データを結合し、対象体の位置を計算する。対象体に複数の離間された超音波エミッタを取り付けることによって、各エミッタの位置データを結合して対象体の方向を計算することもできる。
【0054】
ある実施形態では、位置センサはワイヤレス型であり、それによって分娩プロセスとの干渉を最小限に抑えている。場合によっては、追跡対象体に物理的に接続されかつ追跡対象体の正確な空間配置を可能にする機械式センサ(例えば回転エンコーダ)がジョイント部に設けられるようなロボットアームに基づく機械式位置決定システムを用いることは有利であり得る。
【0055】
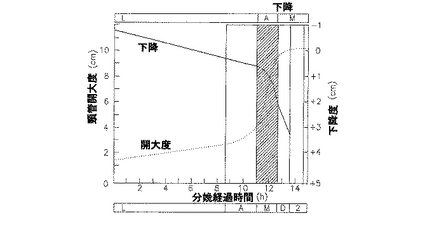
位置センサPS1〜PS4(或いは、ある実施形態では図10のセンサ1000)の位置に応じたデータを受信するコンピュータ12(図1)は、このデータを処理して所望の形式の表示部を提供する。コンピュータ12は、ソフトウエア、メモリ、大容量記憶装置、中央処理装置(CPU)などを含み得る。図1は、2種類の表示部14、16を示す。他の表示部が用いられてもよい。表示部14は、各パラメータ、展退度、頸管開大度、頸管の位置姿勢、下降度及び/またはBPP距離を、距離の単位(例えばcm)の形式で表示する。また一方、表示部16は、頸管開大度と児頭(または他の先進部)の下降との相互関係を示す時間の関数として頸管開大度及び下降度がグラフ形式で表示されかつ展退度及び頸管の位置姿勢も同様に表示され得るようなパルトグラムである。
【0056】
パルトグラム表示部16は、図4により具体的に示されているようなものであり、分娩進行の視覚的表示を提供しかつ所望であれば記録も可能なので価値がある。パルトグラムを用いることによって、分娩進行が正常か否かの判定が向上し得る。パルトグラム上には「アラート(Alert)」ライン及び「アクション(Action)」ラインがプリントされ得るが、これは分娩進行が正常であるか異常であるかを視覚的に示し、それによって、必要があれば迅速な行動を取るように立会い者に一層良く警告する。そのような「電子パルトグラム」はまた、遷延分娩の数と、分娩時、分娩後及び新生児期初期の感染率と、不必要な介入の数と、児頭の誤った評価に起因する新生児外傷とを顕著に低減させることができる。必ずしもパルトグラムが用いられる必要はなく、他の型のパルトグラムが用いられてもよい。
【0057】
図5に示す監視システムは、図1のシステムに類似しているが、母体の子宮領域を画像診断し、例えば、母体の頸管、骨盤、児頭(または他の先進部)を連続的に表示するための画像診断システムを更に備えている。他の部分も表示され得る。
【0058】
図5のシステムは、コンピュータ12経由で画像ディスプレイ42上に子宮領域を映し出すための超音波トランスデューサ40を含む。このシステムはまた、超音波トランスデューサ40に装着された位置センサPS5を含む。本実施形態では、位置情報を捕捉するために位置センサ1000も用いられ得る。従って、ディスプレイ42上の画像における任意の点はマウスやタッチスクリーンなどのマーカ43によって選択され、その位置はコンピュータ12に送られ、母体の恥骨に装着された位置センサPS1の位置に対するそれぞれの点の位置を確認することができる。キーボードなどの他の装置は、マーカ43の機能に影響し得る。他の位置または追加の位置がマッピングされてもよい。この情報を用いて、コンピュータ12は、(例えば)表示部14、16に表示される種々の関係を計算することができるので、場合によっては位置センサPS2、PS3、PS4が必要なくなる。ディスプレイ42に表示される画像は、例えば図8に示されている如く児頭上にBPDをマーキングするのと同じように用いられることができ、それによって、特に骨盤入口部と胎児のBPDとの空間距離の計算及び監視を可能にする。他の計算もなされ得る。母体の骨盤の他の点のみならずBPDまたは児頭の先端部以外の他の基準点が、分娩進行を監視するための基準点として用いられ得ることを理解されたい。医師にはそれぞれに好みがあるので、このような自由は望ましいであろう。
【0059】
図5に示されている画像診断システムはまた、例えば、頸管の進行的開大及び展退を示す図6A〜6Dや、種々の下降度によって両坐骨棘7(図7)または母体の骨盤入口部(図8)に対する児頭先端部の進行的下降を示す図7及び図8などに図示されているような、種々の分娩段階の視覚的表示を与えるためにも用いられ得る。画像診断システムが図5に示されている5つの位置センサPS1〜PS5全てと共に用いられるのであれば、分娩開始時またはその後にBPDを計測するためだけに超音波画像診断が用いられ得る。他の幾何学的配置及び他の形態を有するような他の1組の位置センサが用いられてもよい。ここで、コンピュータ12は、BPDと例えば児頭先端部との距離を決定し、その後児頭先端部の位置を用いてBPD位置を決定することもできる。超音波画像診断は、所望であれば、その後検証のためだけに用いられ得る。超音波画像診断は、頸管の開大度及び展退度を検証するためにも用いられ得る。
【0060】
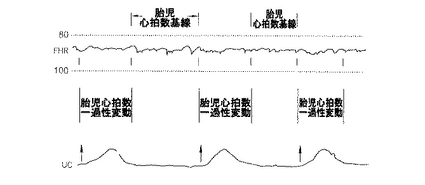
図5に示されているようなシステムは、例えば母体の子宮収縮を検出するためにも用いられ得る。収縮中には、胎児の頭は僅かに動き、開大も僅かに進行する。収縮後には、両者は共に以前の位置まで後退する。従って、開大度及び/または児頭位置を時間の関数として観察することによって、担当医は、収縮の発生と収縮の持続時間及び強さを見極めることができる。更に、児頭位置センサPS2に心脈センサを組み込むことによって、医師は、子宮収縮(UC)と胎児心拍数(FHR)の関係を観察し、両者の関係を図9に示されているように示し得る。種々のセンサから上記の情報を受信し、例えば、図9に示されているような子宮収縮(UC)との関連から見た胎児心拍数(FHR)に相当する表示をモニタ45に作り出すように、コンピュータ12をプログラムすることもできる。そのような情報は、合併症の存在が確証または予測される場合には特に望ましい。他の分析を実行することもできる。
【0061】
図中には個別の表示部が示されているが、同一の大型コンピュータディスプレイ上にマルチウィンドウ形式で表示できることも理解されたい。
【0062】
本発明は幾つかの好適実施形態に関連して述べられているが、これらの好適実施形態は単に説明目的で示されたものであり、本発明の他の変形、改変、適用が適宜なされ得ることは理解されるであろう。
【図面の簡単な説明】
【0063】
【図1】本発明に基づき構築されたシステムのある実施形態を示すブロック線図である。
【図2】本発明のある実施形態に基づいた、図1のシステムにおける位置センサの1つを示す。
【図3】本発明のある実施形態に基づいた、用いられ得るある種の位置センサシステムのブロック線図である。
【図4−A】本発明のある実施形態に基づいた、図1のシステムにおけるパルトグラム表示部をより具体的に示す図である。
【図4−B】本発明のある実施形態に基づいた、種々の分娩段階における先進部の胎向の表示を示す図である。
【図5】本発明のある実施形態に基づいた、母体の子宮、特に頸管、骨盤、及び児頭の画像を表示して分娩進行をより良好に示すための画像診断システムを説明するブロック線図である。
【図6−A】本発明のある実施形態に基づいた、種々の分娩段階において図5のシステムにより作り出される表示を示す。
【図6−B】本発明のある実施形態に基づいた、種々の分娩段階において図5のシステムにより作り出される表示を示す。
【図6−C】本発明のある実施形態に基づいた、種々の分娩段階において図5のシステムにより作り出される表示を示す。
【図6−D】本発明のある実施形態に基づいた、種々の分娩段階において図5のシステムにより作り出される表示を示す。
【図7】本発明のある実施形態に基づいた、児頭の下降中に図5のシステムにより作り出される表示を示す。
【図8】本発明のある実施形態に基づいた、監視データを如何に処理して母体の骨盤入口部に対する児頭BPDの空間距離の変化を表示し得るかを示す。
【図9】本発明のある実施形態に含まれ得るような胎児心臓監視表示画面及び子宮収縮を示す。
【図10−A】本発明のある実施形態に基づいた指装着型センサを示す。
【図10−B】本発明のある実施形態に基づいた、指装着型センサの非対称凹部とこれに対応する児頭に装着されたセンサの突部の拡大図を示す。
【図10−C】本発明のある実施形態に基づいた、胎児側のセンサに取付可能な非対称的に形成されたカバーを示す。
【図11】本発明のある実施形態に基づいた、頸管及び胎児先進部に取付可能な剛性部材を示す。
【技術分野】
【0001】
本発明は、出産中の分娩進行を監視するための方法及び装置に関する。
【背景技術】
【0002】
正常分娩は通常、分娩第1期から第3期までの3つの段階に分けられる。分娩第1期は陣痛発来から子宮口の全開大まで、第2期は子宮頸管の全開大から胎児の娩出まで、第3期は胎児の娩出後から胎盤の娩出までの期間である。分娩中には、児の心拍数を記録する外部超音波システム及び母体の子宮収縮を検出する外部システムか、児頭に取り付けられた電極によって児の心脈を検出しかつ母体の子宮内に挿入されたカテーテルによって母体の子宮収縮を検出する電子システムかいずれかを用いるのが一般的である。
【0003】
しかしながら、分娩進行を判定するために、分娩中に他の多数の母児の生理的状態を監視することも可能である。そのような状態としては、(1)展退(分娩第1期及びそれ以前に子宮頸管が薄く伸びること)、(2)頸管の開大(子宮口の大きさが増大すること)、(3)頸管の位置姿勢(膣軸、通常は児頭、と頸管との位置関係)、(4)下降度(station)(母体の骨盤に対して胎児先進部の所定の点がどこまで下降しているかのレベル)、(5)骨盤と児頭との関係を示す胎向、(6)子宮口に胎児のどの部分があるかを示す胎位(例えば額位、顔位、または骨盤位)がある。
【0004】
下降度は、より一般的には、医師によって触知可能であるような両坐骨棘と児頭先端部との距離で決定されるが、より正確には、母体の骨盤入口部と児頭大横径(BPD)との距離として定義される。
【0005】
上記の状態は、通常は理学的検査によって、例えば母体の膣から指を挿入して触診することによって、判定される。しかしながら、そのような「指」診の精度は非常に主観的であり、医師の経験、判断と、内診指の大きさにも大きく依存する。このような理学的検査の欠点は他にもあり、例えば、間隔を空けて行われる場合があること、一般的には母体に不快感を与えること、そして、汚染、感染、胎児モニタのずれ(dislodgment)、児の損傷などを含む多くのリスクをはらんでいることが挙げられる。理学的検査から分娩進行の正確な段階を判定できなければ、児や母体が傷付けられるか場合によっては死亡することもある。
【0006】
これらの状態を自動的に監視するために多くの装置が過去にも提唱されてきた。例を挙げると、特許文献1は、分娩中に頸管開大度を監視するために長さ方向に沿って離隔した電極を有する長寸のチューブを提唱し、特許文献2及び特許文献3は、心拍動を監視するために児頭に取り付けられるような、下降経過を監視するために較正された胎児監視プローブを提唱し、特許文献4は、胎児の位置及び頸管の状態を監視するための長寸の可膨張性サックを提唱し、特許文献5は、頸管の状態を監視するためのペッサリーを提唱している。しかしながら、なんらかの理由により、以前に提唱された装置のいずれもが広範に使用されることはなく、長い歴史を持つ「指」診が今日まで一般的に利用され続けている。
【0007】
最近の研究(Sherer et al., Ultrasound Obstet Gynecol 2002 Mar 19 (3):258-68)は、児頭位置の経腟指診は第1期の活動期(active labor)及び分娩第2期においてエラー発生率が高いこと(それぞれ75%、65%)を実証した。下降度または児頭位置の評価が不正確であれば、児頭が高すぎて産道を通過できずにいる時に鉗子または吸引分娩器を使用する決断を下すことにもなり、帝王切開術が必要になった時にその実施が遅れることにもなりかねない。いずれの場合にも、最終的に、胎児にとっては致命的であり母体には大きなダメージを与える結果となることがある。
【0008】
更に、「指診(指による内診)」は、感染を引き起こすことがあり、早期破水の場合には禁止されている。指診はまた、特にピーク時には、分娩室スタッフに大きな作業負荷を課す。更に、指診は間欠的に行われるので、分娩進行の動向及び急激な変化が見逃されることがあり、潜在的に誤った決断を下しかねない。また、指診を複数回行うと炎症のリスクが増す。
【0009】
従って、分娩進行に関する正確な情報を提供する装置及び方法が必要である。
【0010】
【特許文献1】米国特許第4,476,871号
【特許文献2】米国特許第4,942,882号
【特許文献3】米国特許第5,135,006号
【特許文献4】米国特許第5,222,485号
【特許文献5】米国特許第5,406,961号
【特許文献6】米国特許第4,945,305号
【発明の開示】
【発明が解決しようとする課題】
【0011】
本発明のある側面によれば、出産中の分娩進行を監視する方法であって、母体骨盤上の所定の点に位置センサを装着する過程と、ある基準に対する位置センサの3次元空間位置を監視する過程と、母体骨盤上の所定の点に対する胎児先進部の位置を監視して分娩進行の指標を与える過程と、頸管にセンサを装着することによって頸管開大度を計測する過程とを含む方法を提供する。
【0012】
本発明の別の実施形態では、出産中に母体の分娩進行を非継続的に監視する方法であって、プローブまたは指装着型センサを用いて、母体骨盤上の所定の点に対する胎児先進部を計測し、かつ例えば頸管上のある2点に接触することによって頸管開大度を計測する過程を含む方法を提供する。
【0013】
本発明の種々の実施形態について、例示のために後述する。ある実施形態では、胎児先進部の位置と、母体の子宮頸管端部の両側部の位置とが、これらのそれぞれの要素に取り付けられた位置センサによって監視される。第2の実施形態では、後者は、ハンドヘルドプローブまたは指装着型センサを用いて非継続的に監視される。第3の実施形態では、後者は、超音波トランスデューサを作動させて母体の頸管及び骨盤と児頭とを表示画面に映し出し、かつ、超音波トランスデューサ上の位置センサと表示画面をマーキングするためのマーカとを用いてこれらの要素の位置を配置することによって監視される。第4の実施形態は、少なくとも2つのセンサを利用する。1つのセンサは、骨盤上の骨の位置に装着されて基準点として働き、他のセンサは、先ず体外から骨盤をマッピングし、超音波プローブに取り付けることによってBPD図(BPD plan)をマッピングし、体内から坐骨棘及び坐骨結節をマッピングし、次に頸管及び胎児先進部に装着されるように用いられ得る。
【0014】
本発明の更なる実施形態では、前上腸骨棘、恥骨結合、1〜3レベルの仙骨、坐骨棘及び坐骨結節にも位置センサが装着され得るか或いはその位置座標が得られる。そしてそのような位置は、骨盤入口部、出口部及び骨盤中央部(midpelvis)をマッピングするために用いられ得る。そのようなマッピングまたは骨盤計測は、児頭が産道を通過するのに適切な大きさであるかを判定するのに役立ち得る。
【0015】
実施形態に記載されている更なる機能によれば、頸管端部の両側部に装着された位置センサの位置を監視しかつその間の空間距離を継続的に表示することによって、母体の頸管の頸管開大度が継続的に表示される。胎児先進部(例えば児頭)の胎向もまた、それらのそれぞれの位置を監視及び表示することによって継続的に示される。
【0016】
第2の実施形態では、プローブまたは指装着型センサを頸管の各側部と児頭上のまたは児頭に接続された所定の点とに接触させることによって、母体の頸管の頸管開大度及び胎児先進部の胎向またはBPDが非継続ベースで監視される。
【0017】
実施形態に記載されている更なる機能によれば、上記の状態は、計算され、距離の単位(たとえばcm)の形式及び/またはグラフの形式で表示される。グラフは、頸管開大度と胎児先進部の下降との相互関係を示すもので、パルトグラムと呼ばれることもある。その上、そのような表示部は、産道内の胎児の画像や、骨盤入口部、出口部及び骨盤中央部に対する児頭の経時的な関係及び方向を含み得る。図4−Bは、本発明のある実施形態に基づき、種々の分娩段階における先進部の胎向の表示を示す。他の方法を用いてそのような情報の表示を行なってもよい。
【0018】
本発明の更なる実施形態に基づき、出産中に母体における分娩進行を監視するための装置が提供される。この装置は、少なくとも2つのセンサを含み、1つのセンサは、骨盤8上の骨の位置に装着されて基準点として働き、他のセンサは、先ず体外から骨盤をマッピングし、超音波プローブに取り付けることによってBPD図をマッピングし、体内から坐骨棘及び坐骨結節をマッピングし、次に胎児先進部に装着されるように用いられることができ、頸管の両側部に装着されることができる。
【0019】
出力装置は、好適にはディスプレイであるが、コンピュータによって出力されるデータを表示、記録及び/または処理するための作図装置、記録装置、または他の装置であり得る。
【0020】
以下に特に詳述されるように、そのような方法及び装置は、継続的または定期的のいずれかで、分娩進行の監視を可能にする。そのような方法及び装置は、従来の「指診」に見られたような、経験、判断、及び内診指の大きさに基づく精度にはあまり左右されず、母体に与える不快感が少なく、また、汚染、感染、胎児モニタのずれ、或いは胎向または分娩進行の誤った評価に起因する児または母体の損傷または死亡のリスクが少ない。更に、この技術は、クリティカルな状態即ち骨盤入口部に対する児頭BPDの空間距離の変化をより正確に監視することを可能にする。
【0021】
本発明の更なる機能及び利点については、以下の記載から明らかになるであろう。
【発明を実施するための最良の形態】
【0022】
これより先の記載において、本発明の種々の側面を記述する。説明を分かり易くするため、本発明が十分に理解できるように特定の形態及び詳細について示されている。しかしながら、本明細書中に記載されている特定の詳細な説明がなくとも本発明を実施し得ることは、当業者であれば理解できよう。更に、本発明が不明瞭にならないように、公知の機能については省略するかまたは簡単な記載に留めた箇所がある。
【0023】
先ず、図1を参照されたい。図1は、分娩中の母体の子宮と、分娩進行を監視するシステムとを模式的に例示したものである。コンピュータ12(例えば、パーソナルコンピュータ、ワークステーション、または「コンピュータ・オン・チップ(computer on a chip)」を含む専用装置などであり得る)は、とりわけ、表示部14や16などの表示を例えばモニタに出力する。ここに示した表示部以外のものが用いられてもよい。コンピュータ12は、例えば送信機10及びセンサPSに動作可能に接続される。送信機10は、用いられなくてもよい。コンピュータ12は、通常、適切なソフトウエア及び1若しくは複数の適切な処理装置を含む。図1は、子宮3内で典型的な胎向即ち子宮頸管5からの出産に備えて児頭4を下にした姿勢をとっている胎児2を示す。頸管5は、胎児が子宮頸管及び膣腔を通過するのに備えて開大及び展退する。娩出中の児頭下降の種々の段階は、例えば両坐骨棘または骨盤8の骨盤入口部8aに対して計測され得る。
【0024】
分娩進行の監視は、例えば、母体の子宮及び骨盤の種々の部分と児頭とに装着された1組の位置センサによって行われる。第1の位置センサPS1は、例えば、両坐骨棘及び骨盤入口部8aからの基準点として骨盤8の1つに装着され得る。第2の位置センサPS2は、児頭4(児頭でなければ他の典型的な胎児先進部)に装着され得る。第3の位置センサPS3及び第4の位置センサPS4は、例えば、外子宮口の2つの端部の両側部5A及び5Bに装着され得る。センサ装着位置は、図示されている位置と異なってもよい。
【0025】
別の実施形態では、位置センサPS2は、例えば当該分野で公知でありかつ胎児の生命徴候を監視するのに一般的に用いられるような胎児頭皮用電極に装着されるかその一部をなし得る。例えば、位置センサPS2は、フックで胎児に取り付けられるようなコープランド(Copeland)頭皮用電極、或いは、例えば、ねじ、ばね、スパイラルなどで胎児先進部に取り付けられるような胎児頭皮用電極に装着されるかその一部をなし得る。
【0026】
別の実施形態では、位置センサPS2は、他の方法、例えば、吸盤、テープ、または他の接着剤などによって胎児先進部に装着され得る。
【0027】
コンピュータまたはモニタ(例えば図5のコンピュータ12、後述)は、骨盤の動きを追跡することができ、従って、骨盤全体、特に骨盤入口部、出口部及び骨盤中央部の空間位置を監視できる。
【0028】
ある実施形態では、位置センサPS1〜PS4は、任意の適切な様式で(例えば、クリップ、吸盤、または他の接着剤などによって)それぞれの表面に固定され得る。各位置センサは、通常、ある基準に対してその正確な3次元空間位置及び方向を検出することが可能であるが、これについては後述する。位置センサは、一端がそれぞれの表面にクリップ留めされるような剛性ロッドまたは物体または他の支持体の他端に設けられることができる。
【0029】
本発明の別の実施形態では、分娩進行は、ハンドヘルドプローブに装着された位置センサ、指貫(thimble)に装着された位置センサ、または他の指装着型位置センサによって、非連続ベースで監視される。ある実施形態では、プローブの操作はユーザの指を用いて行われ、指には位置センサが装着されている。プローブは、胎児及び母体上の種々の点に接触させられる。プローブは、例えばロッドまたは他の剛性物体に設けられることもある。
【0030】
ここで、図10−Aを参照されたい。図10−Aは、本発明のある実施形態に基づく位置プローブまたは指装着型センサ1000の模式図である。例えば指貫形状の位置プローブまたは指装着型センサ1000は、検査を行なう医者または医師の指1002の先端部に適合し得る。そのようなセンサを保持するための他の形状及び嵌合、例えば指輪や手袋なども可能である。導線またはワイヤ1001は、指装着型センサを、コンピュータ、処理装置、または胎児監視ステーションに動作可能に接続する。或いは、動作可能な接続は、ワイヤレス電子データリンクによるものでもよい。センサ1000は、本明細書中に記載されているプローブPSと同様に作動し、同様の方法で用いられかつシステムに組み込まれることができる。
【0031】
図10−Aには、胎児先進部1004も示されている。胎児先進部1004は、例えば頭または他の部分であって、ここに胎児頭皮方向ガイド1006が取り付けられている。胎児頭皮方向ガイド1006は、適切な電極、ワイヤ、または伝送装置(例えば心拍数情報を伝送するためのもの)を含んでもよいし含まなくてもよい。胎児頭皮方向ガイド1006は、任意の適切な方法で(例えば、クリップ、吸盤、または他の接着剤などによって)胎児先進部の表面に固定され得る。胎児頭皮方向ガイド1006は、例えば、胎児の生命徴候を監視するのに一般的に用いられるような胎児頭皮用電極に取り付けられるか、これを含むか、或いはその一部をなすことができるが、そのような装置に関連するものでなくともよい。胎児頭皮方向ガイド1006は通常、位置プローブとの接触のための基準点または取着点(affixation point)を提供し、更に、通常は位置プローブと適切に接触して位置プローブ(対応キー部分を含む)を胎児頭皮方向ガイド1006に対してある一定の向きに方向付けするようなキー部分またはキー形状を与えることによって、位置プローブのための方向ガイドも提供する。頭皮方向ガイド1006は、適切な方法で胎児に取着される。
【0032】
指装着型センサ1000の先端部1010は、通常胎児頭皮方向ガイド1006の外面側1008に配置された1若しくは複数の凹部1009の形状に適合しかつ対応(マッチング)するような1若しくは複数の通常非対称的に形成された突部1012に適合され得る。凹部1009及び突部1012は、それぞれ、他方の部分に対応するようなキー部分を形成する。突部1012と凹部1009の箇所は、他の実施形態では、指装着型センサ1000の先端部1010と胎児頭皮方向ガイド1006の外面側1008となっていることもある。突部1012及び凹部の形状及び数は、図示されているものと異なってもよい。「突部」即ちキー部分は、電極の表面から突出しなくてもよい。例えば「突部」は、対応するキー部分をそこに挿入し得るか或いはそのようなキー部分に対応し得るような凹部であってもよい。ワイヤは必ずしも用いられる必要がなく、位置プローブは後述するようなワイヤレス方法に基づき作動し得る。
【0033】
本発明のある実施形態では、使用時に、プローブまたは指装着型センサ1000を、例えば児頭1004(または胎児の他の先進部)や母体上の1組の点(1組は1つの要素を含み得る)に接触させることができる。通常はセンサ1000を子宮頸管1014の外子宮口の各側部に接触させるが、母体の他の部分に接触させてもよい。子宮頸管1014の外子宮口の各側は、基準点または取着点及び方向点を与えるためのキー装置またはガイドを含むこともあるが、通常、そのような装置は母体に必要ない。もしそのような装置が用いられるのであれば、その形状はガイド1006に類似したものになるであろう。
【0034】
ある実施形態では、指装着型センサ1000などのセンサを胎児先進点1004または頸管に接触させたときにそのような点の位置の計算が開始するように、センサはタッチセンシティブであり得る。別の実施形態では、医師は、児頭などの指定された点に指装着型センサ1000を接触させることができ、コンピュータまたは監視装置に示すことによって位置捕捉を開始することができる。例えば、ユーザは、そのような位置センサに動作可能に接続されているような、マウスをクリックしたり、キーボード、フットパッドまたは他のスイッチを操作したりして、ユーザの意思表示を与えかつそれぞれの点の位置の計算を開始することができる。図示されているものと異なる基準点または取着点が用いられてもよい。例えば母体の子宮頸管の両端5A、5B(または他の点)に対する被接触胎児先進点1004の相対位置を計算することによって、分娩進行の予測が可能になる。
【0035】
ある実施形態では、例えば骨盤に対する被接触点の幾何学的配置の必要な精度を確立するために、指装着型センサ1000を胎児先進部1004上の点に接触させることによりもたらされる情報以上の情報を収集することが望ましい。従って、胎児先進部の位置を計算するために、センサ1000を胎児先進部1004に接触させる方向を固定することが望ましいであろう。
【0036】
次に、図10−Bを参照されたい。図10−Bは、本発明のある実施形態に基づき、指装着型センサ1000上の非対称凹部/突部1012と、対応する胎児頭皮方向ガイド1006上の突部1008の拡大図である。突部1012及び1008は、通常、接触時に相対的な位置及び方向を固定するためのキーシステムを提供する。センサ1000と胎児頭皮方向ガイド1006とが接触する方向を固定するには、例えば、センサ1000の位置を計算する時点で(例えば、上述したようなマウスクリック時に)センサ1000の先端部1010の突部1012が胎児頭皮方向ガイド1006の外面側上の凹部1009に嵌合することを必要条件とすることができる。通常、突部は、センサ1000と方向ガイド1006とが完全に接触しているときにこれらが相互に特定の相対的な幾何学的配置(方向)を有するように形成される。
【0037】
或いは、センサ1000と胎児先進部1004とが接触する方向は、例えば、胎児先進部1004上または胎児頭皮方向ガイド1006上の幾つか(通常は3つであるが、他の数でもよい)の指定点との接触によって決定され得る。そのような指定点は、例えば、大泉門及び/または小泉門など児頭上の解剖学的標識のうち任意の3つのものであるか、胎児先進部1004に取り付けられた3つのステッカーまたはマーカであり得る。
【0038】
図10−Cを参照すると、本発明のある実施形態に基づくキャップまたはカバー1016が示されている。これは、胎児頭皮方向ガイド1006に取り付けられることができ、ここには非対称的に形成された形1018がエッチングされるか或いは取り付けられている。他の適切な形、しるし、または形状が用いられてもよい。胎児先進部1004に対してセンサ1000を接触させる方向の確立は、例えば、センサ1000を非対称的に形成された形1018上の幾つか(通常は3つであるが、他の数でもよい)の点に接触させることによって達成され得る。そのような3つの点は、例えば、胎児頭皮方向ガイド1006に取着またはエッチングされ得るような非二等辺三角形を形成する点1020A、1020B及び1020Cであり得る。他の形状が用いられることもある。ある実施形態では、キャップは省略され得る。ある実施形態では、胎児頭皮方向ガイド1006に直接、または胎児に装着された他のセンサに、非対称形状の形1018がエッチングされるか或いは取り付けられ得る。
【0039】
別の実施形態では、頸管の2つの端部5A、5Bと胎児先進部1004の各々に長さが既知である幾つか(通常は3つであるが、他の数でもよい)の剛性部材の第1の端部が取り付けられ得る。そのような各剛性部材の第2の端部は、例えば位置センサに取り付けられ得る。センサの位置は、頸管または胎児先進部の位置及び方向によって変わる。別の実施形態では、そのような剛性部材の第2の端部は、体外にあるレセプタクルに回転可能かつ移動可能に接続され得る。ここで、図11を参照すると、剛性部材1102が図示されている。剛性部材1102の第1の端部は、本発明のある実施形態に基づき、例えば頸管5A、5B及び胎児先進部1004に取り付けられ得る。他の適切な取付点及び他の部材数が用いられてもよい。そのような剛性部材1102の第2の端部は、例えばそのような部材1102の動き及び方向を計測するレセプタクル1104に、移動可能に挿入される。部材1102のそのような動きは、頸管5A、5Bの開大度及び展退度と、胎児先進部1004の下降度及び胎向とを反映し、例えばレセプタクル1104内に配置されかつ各剛性部材1102に取り付けられた電子的、機械的、または光学的読取装置による記録が可能である。レセプタクル1104はまた、レセプタクル1104の位置に対する剛性部材の位置がわかるように、レセプタクル1104の方向の基準点として位置センサを有し得る。
【0040】
位置センサは、例えば、磁気式、超音波式、機械式、慣性式、光ファイバ式、または他の既知の位置センサであってよい。この目的のための多くの種類の位置センサが知られている。図示されている例では、位置センサPS1〜PS4及びセンサ1000は、例えば特許文献6に記載されているような、磁界式センサである。他の位置センサ、及びセンサから位置を計算する他の方法が用いられてもよい。位置センサPSまたはセンサ1000は、例えば送信機10(図1)によって作動されたときに例えば信号を出力することができる。このことは、位置センサの出力と送信機10によって送信される信号とを受信するべく接続されたコンピュータ12(図1)によるセンサの正確な位置の計算を可能にする。コンピュータ12は、各センサ1000またはセンサPS1〜PS4の正確な位置及び方向を計算し、それらの計算から、分娩中の母児の種々の生理的状態を表示するための表示部を作成しかつ制御し得る。ここで、表示部は例えば14(図1)、16(図1)として示されているものであり、種々の生理的状態は特に以下のものを指す(その他の状態も示され得る)。
【0041】
1.展退14A:これは、分娩第1期及びそれ以前に子宮頸管が薄く伸びる過程である。頸管は、分娩プロセスのためにより広い空間を確保するべく収縮によって薄く伸ばされる。展退度は、0%(展退なし)から100%(頸管厚さ約0.25cm以下)までパーセンテージで表わされる。図1に示されているシステムでは、展退度は、児頭に装着された位置センサPS2と、子宮頸管5の端部に装着された2つの位置センサPS3、PS4を結ぶ線上の中間点との空間距離として計算され、14aに表示される。種々の点におけるセンサ1000の位置もまた、そのような計算に用いられ得る。他の方法を用いて展退度を定義または提示することもできる。
【0042】
2.頸管開大14B:これは、子宮口の開大である。正期産児の児頭は殆どの場合直径10cmの子宮口を通過することができるので、子宮口の径が10cmになったら全開大になったと考えられる。図1に示されているシステムでは、頸管開大度は、子宮頸管5の両側部に装着された2つの位置センサPS3とPS4との空間距離として計算され、14bに表示される。適切な点におけるセンサ1000の位置もまた、そのような計算のために用いられ得る。他の方法を用いて頸管開大度を定義または提示することもできる。
【0043】
3.頸管の位置姿勢14C:これは、頸管の前傾・後傾である。本願の場合、頸管の中心軸の向き、即ち胎児の先進部に装着された位置センサPS2と、頸管の両側部に装着された2つの位置センサPS3、PS4を結ぶ線上の中間点とを結ぶ線の方向として計測され得る。頸管軸の初期方向は、分娩開始時に得られる。頸管の位置姿勢の経過は、初期方向の角度と所与の時間における頸管軸とのなす相対角度として示される。医師は、任意の角度範囲、例えば「前方」または「中央」または「後方」を指定し得る。或いは、頸管の位置姿勢は、位置センサPS1によって測定されるような恥骨結合と、頸管の両側部に装着された2つの位置センサPS3、PS4を結ぶ線上の中間点との距離として表示され得る。他の方法を用いて頸管の位置を定義または提示することもできる。例えば、種々の点におけるセンサ1000の位置が用いられてもよい。
【0044】
4.下降度14D:これは、母体骨盤の所定の点に対する児頭(または他の先進部)の位置である。前述のように、従来法の下降度は両坐骨棘と児頭先端部との距離である。ある実施形態では、骨盤入口部とBPDとの距離を計測するために、より正確な下降度計測法が用いられ得る。本明細書中に示されているようなシステムでは、下降度の計算及び表示は、図7に示されているような両坐骨棘と児頭先端部との距離に基づく従来の様式で、或いは、図8に示されているような骨盤入口部とBPDとの空間距離に基づくより正確な様式で行われ得る。他の方法を用いてそのような位置を定義または提示することもできる。
【0045】
5.骨盤と児頭の関係を示す胎向と、子宮口に胎児のどの部分があるかを示す胎位(例えば額位、顔位、または骨盤位)。他の方法を用いてそのような胎向を定義または提示することもできる。
【0046】
6.骨盤計測:これは、当該分野で既知であるような、骨盤入口部と骨盤出口部と骨盤中央部の領域及び形状のマッピングまたは計算である。そのようなマッピングの目的は、骨盤入口部、出口部及び骨盤中央部の領域が児の通過に適しているかを判定することであり得る。他の方法を用いてそのような領域及び形状を定義または提示することもできる。
【0047】
本発明は、ある実施形態において、高精度の骨盤計測を得る方法を提供し得る。そのような骨盤計測は、センサを、最初に骨骨盤及び棘の一部または全部に、そしてマッピング段階においては以下の点即ち前上腸骨棘、恥骨結合、外測または経膣により測定可能な1〜3レベルの仙骨、坐骨棘及び坐骨結節の一部または全部に、取り付けるか或いは接触させることによって得ることができる。他の計測領域が用いられてもよい。骨盤計測は、分娩第1期の活動期中、初期分娩の前、または他の任意の時間に、本発明の実施形態によって実施され得る。
【0048】
位置センサPS1〜PS4または1000は、種々の既知の型のセンサであり得る。図2は、そのような位置センサPSまたは1000の1つを模式的に示している。これは、例えば、全てが位置センサの中心点24から正確に分かっている距離にあるような幾つか(通常は3つであるが、他の数でもよい)の離間された磁気コイル21、22、23の三角形のアレイを含む。このように、ある基準に対する3つのコイル21〜23の位置及び方向を測定することによって、位置センサPSまたは1000の中心点24の正確な位置がその基準に対して測定され得る。
【0049】
種々の実施形態と共に用いられ得る位置センサシステムの一例が、特許文献6に記載されている。そのようなシステムは、図3のブロック線図に示されているように、パルスDC磁気信号を利用して送信アンテナ31に対する6自由度の受信アンテナ30の位置姿勢(位置及び方向)の正確な計測を可能にする。送信及び受信コンポーネントは、互いに位置及び方向が既知である2つまたはそれ以上の送信アンテナからなる。送信アンテナ31は、DC駆動回路32から(パルス直流信号によって)1つずつ駆動される。受信アンテナ30は、送信された直流磁界及び地球磁界を信号処理回路33において計測し、この情報をコンピュータ34に与える。それによって、コンピュータ34は、受信アンテナ30の位置姿勢を判定する。特許文献6が教示する計算方法は、本発明のシステム及び方法の種々の実施形態と共に用いられることができ、例えばコンピュータ12及び/またはコンピュータ12内のソフトウエアにおいて実施可能であり得る。他の計算方法が用いられてもよい。
【0050】
そのような位置検出システムの構築及び操作については特許文献6に詳述されており、特許文献6は引用を以って本発明の一部となす。本発明の実施形態と共に用いられ得る他の磁界式システムは、例えば、特許文献6の先行技術の項に記述されている特許に記載されているような、交流磁界に基づくものであり得る。
【0051】
位置センサPS1〜PS4または1000に用いられ得る他の位置検出システムは、例えば、米国バーモント州バーリントンのポヒマス社(Polhemus Inc.)製または同アセンション・テクノロジー社(Ascension Technology Corporation)製のものである。そのようなシステムにおいては、例えば3つの相互に垂直な磁界が順に送信され、例えば3つの相互に垂直な方向のコイルが幾つかの磁界を検出するために利用される。複合コイルの空間位置及び方向を計算するために、コンピュータが利用される。
【0052】
位置センサPS1〜PS4または1000に用いられ得る更に別の位置検出システムは、米国マサチューセッツ州ケンブリッジのアダプティブ・オプティクス社(Adaptive Optics Associates, Inc.)製のものである。これは、位置及び方向を検出する対象体に取り付けられた複数の光源と、光源から放射される光を検出するべく既知の空間位置に配置された複数のカメラとを含む。コンピュータは、全てのデータを結合し、対象体の位置及び方向を計算する。
【0053】
位置センサPS1〜PS4または1000に用いられ得る更にもう1つの位置検出システムは、米国コネチカット州ニューヘヴンのサイエンス・アクセサリーズ社(Science Accessories Corporation)製のものである。これは、位置を検出する対象体上の点に取り付けられた超音波源と、超音波源から発せられる音を検出するべく既知の空間位置に配置された複数のマイクロホンとを含む。コンピュータは、データを結合し、対象体の位置を計算する。対象体に複数の離間された超音波エミッタを取り付けることによって、各エミッタの位置データを結合して対象体の方向を計算することもできる。
【0054】
ある実施形態では、位置センサはワイヤレス型であり、それによって分娩プロセスとの干渉を最小限に抑えている。場合によっては、追跡対象体に物理的に接続されかつ追跡対象体の正確な空間配置を可能にする機械式センサ(例えば回転エンコーダ)がジョイント部に設けられるようなロボットアームに基づく機械式位置決定システムを用いることは有利であり得る。
【0055】
位置センサPS1〜PS4(或いは、ある実施形態では図10のセンサ1000)の位置に応じたデータを受信するコンピュータ12(図1)は、このデータを処理して所望の形式の表示部を提供する。コンピュータ12は、ソフトウエア、メモリ、大容量記憶装置、中央処理装置(CPU)などを含み得る。図1は、2種類の表示部14、16を示す。他の表示部が用いられてもよい。表示部14は、各パラメータ、展退度、頸管開大度、頸管の位置姿勢、下降度及び/またはBPP距離を、距離の単位(例えばcm)の形式で表示する。また一方、表示部16は、頸管開大度と児頭(または他の先進部)の下降との相互関係を示す時間の関数として頸管開大度及び下降度がグラフ形式で表示されかつ展退度及び頸管の位置姿勢も同様に表示され得るようなパルトグラムである。
【0056】
パルトグラム表示部16は、図4により具体的に示されているようなものであり、分娩進行の視覚的表示を提供しかつ所望であれば記録も可能なので価値がある。パルトグラムを用いることによって、分娩進行が正常か否かの判定が向上し得る。パルトグラム上には「アラート(Alert)」ライン及び「アクション(Action)」ラインがプリントされ得るが、これは分娩進行が正常であるか異常であるかを視覚的に示し、それによって、必要があれば迅速な行動を取るように立会い者に一層良く警告する。そのような「電子パルトグラム」はまた、遷延分娩の数と、分娩時、分娩後及び新生児期初期の感染率と、不必要な介入の数と、児頭の誤った評価に起因する新生児外傷とを顕著に低減させることができる。必ずしもパルトグラムが用いられる必要はなく、他の型のパルトグラムが用いられてもよい。
【0057】
図5に示す監視システムは、図1のシステムに類似しているが、母体の子宮領域を画像診断し、例えば、母体の頸管、骨盤、児頭(または他の先進部)を連続的に表示するための画像診断システムを更に備えている。他の部分も表示され得る。
【0058】
図5のシステムは、コンピュータ12経由で画像ディスプレイ42上に子宮領域を映し出すための超音波トランスデューサ40を含む。このシステムはまた、超音波トランスデューサ40に装着された位置センサPS5を含む。本実施形態では、位置情報を捕捉するために位置センサ1000も用いられ得る。従って、ディスプレイ42上の画像における任意の点はマウスやタッチスクリーンなどのマーカ43によって選択され、その位置はコンピュータ12に送られ、母体の恥骨に装着された位置センサPS1の位置に対するそれぞれの点の位置を確認することができる。キーボードなどの他の装置は、マーカ43の機能に影響し得る。他の位置または追加の位置がマッピングされてもよい。この情報を用いて、コンピュータ12は、(例えば)表示部14、16に表示される種々の関係を計算することができるので、場合によっては位置センサPS2、PS3、PS4が必要なくなる。ディスプレイ42に表示される画像は、例えば図8に示されている如く児頭上にBPDをマーキングするのと同じように用いられることができ、それによって、特に骨盤入口部と胎児のBPDとの空間距離の計算及び監視を可能にする。他の計算もなされ得る。母体の骨盤の他の点のみならずBPDまたは児頭の先端部以外の他の基準点が、分娩進行を監視するための基準点として用いられ得ることを理解されたい。医師にはそれぞれに好みがあるので、このような自由は望ましいであろう。
【0059】
図5に示されている画像診断システムはまた、例えば、頸管の進行的開大及び展退を示す図6A〜6Dや、種々の下降度によって両坐骨棘7(図7)または母体の骨盤入口部(図8)に対する児頭先端部の進行的下降を示す図7及び図8などに図示されているような、種々の分娩段階の視覚的表示を与えるためにも用いられ得る。画像診断システムが図5に示されている5つの位置センサPS1〜PS5全てと共に用いられるのであれば、分娩開始時またはその後にBPDを計測するためだけに超音波画像診断が用いられ得る。他の幾何学的配置及び他の形態を有するような他の1組の位置センサが用いられてもよい。ここで、コンピュータ12は、BPDと例えば児頭先端部との距離を決定し、その後児頭先端部の位置を用いてBPD位置を決定することもできる。超音波画像診断は、所望であれば、その後検証のためだけに用いられ得る。超音波画像診断は、頸管の開大度及び展退度を検証するためにも用いられ得る。
【0060】
図5に示されているようなシステムは、例えば母体の子宮収縮を検出するためにも用いられ得る。収縮中には、胎児の頭は僅かに動き、開大も僅かに進行する。収縮後には、両者は共に以前の位置まで後退する。従って、開大度及び/または児頭位置を時間の関数として観察することによって、担当医は、収縮の発生と収縮の持続時間及び強さを見極めることができる。更に、児頭位置センサPS2に心脈センサを組み込むことによって、医師は、子宮収縮(UC)と胎児心拍数(FHR)の関係を観察し、両者の関係を図9に示されているように示し得る。種々のセンサから上記の情報を受信し、例えば、図9に示されているような子宮収縮(UC)との関連から見た胎児心拍数(FHR)に相当する表示をモニタ45に作り出すように、コンピュータ12をプログラムすることもできる。そのような情報は、合併症の存在が確証または予測される場合には特に望ましい。他の分析を実行することもできる。
【0061】
図中には個別の表示部が示されているが、同一の大型コンピュータディスプレイ上にマルチウィンドウ形式で表示できることも理解されたい。
【0062】
本発明は幾つかの好適実施形態に関連して述べられているが、これらの好適実施形態は単に説明目的で示されたものであり、本発明の他の変形、改変、適用が適宜なされ得ることは理解されるであろう。
【図面の簡単な説明】
【0063】
【図1】本発明に基づき構築されたシステムのある実施形態を示すブロック線図である。
【図2】本発明のある実施形態に基づいた、図1のシステムにおける位置センサの1つを示す。
【図3】本発明のある実施形態に基づいた、用いられ得るある種の位置センサシステムのブロック線図である。
【図4−A】本発明のある実施形態に基づいた、図1のシステムにおけるパルトグラム表示部をより具体的に示す図である。
【図4−B】本発明のある実施形態に基づいた、種々の分娩段階における先進部の胎向の表示を示す図である。
【図5】本発明のある実施形態に基づいた、母体の子宮、特に頸管、骨盤、及び児頭の画像を表示して分娩進行をより良好に示すための画像診断システムを説明するブロック線図である。
【図6−A】本発明のある実施形態に基づいた、種々の分娩段階において図5のシステムにより作り出される表示を示す。
【図6−B】本発明のある実施形態に基づいた、種々の分娩段階において図5のシステムにより作り出される表示を示す。
【図6−C】本発明のある実施形態に基づいた、種々の分娩段階において図5のシステムにより作り出される表示を示す。
【図6−D】本発明のある実施形態に基づいた、種々の分娩段階において図5のシステムにより作り出される表示を示す。
【図7】本発明のある実施形態に基づいた、児頭の下降中に図5のシステムにより作り出される表示を示す。
【図8】本発明のある実施形態に基づいた、監視データを如何に処理して母体の骨盤入口部に対する児頭BPDの空間距離の変化を表示し得るかを示す。
【図9】本発明のある実施形態に含まれ得るような胎児心臓監視表示画面及び子宮収縮を示す。
【図10−A】本発明のある実施形態に基づいた指装着型センサを示す。
【図10−B】本発明のある実施形態に基づいた、指装着型センサの非対称凹部とこれに対応する児頭に装着されたセンサの突部の拡大図を示す。
【図10−C】本発明のある実施形態に基づいた、胎児側のセンサに取付可能な非対称的に形成されたカバーを示す。
【図11】本発明のある実施形態に基づいた、頸管及び胎児先進部に取付可能な剛性部材を示す。
【特許請求の範囲】
【請求項1】
出産中の分娩進行を監視する方法であって、
胎児先進部上の点に位置センサを接触させ、かつ前記位置センサの位置を捕捉する過程と、
母体上の1組の点に前記位置センサを接触させ、かつ各点における前記位置センサの位置を捕捉する過程と、
前記母体上の1組の点のうちの少なくとも1つの点に対する前記胎児先進部上の点の位置を監視する過程とを含むことを特徴とする方法。
【請求項2】
前記母体上の1組の点のうちの少なくとも1つの点に対する前記胎児先進部上の点の方向を監視する過程を含むことを特徴とする請求項1に記載の方法。
【請求項3】
胎児及び母体上の1組の点での前記位置センサの位置を捕捉する過程を含むことを特徴とする請求項1に記載の方法。
【請求項4】
胎児先進部の1若しくは複数の点にマッチングプローブを取着する過程を含み、
前記マッチングプローブが、前記位置センサのキー部分に対応するようなキー部分を含むことを特徴とする請求項1に記載の方法。
【請求項5】
前記マッチングプローブの前記キー部分が、前記位置センサの前記キー部分に対応する形状を有することを特徴とする請求項1に記載の方法。
【請求項6】
ユーザの意思表示を受け取ることによって前記捕捉を開始する過程を含むことを特徴とする請求項1に記載の方法。
【請求項7】
前記ユーザの意思表示が、マウスをクリックするか或いはスイッチを足踏みするかのいずれか一方によってなされることを特徴とする請求項1に記載の方法。
【請求項8】
母体上で計測された少なくとも2つの点の間の距離を計算する過程を含むことを特徴とする請求項1に記載の方法。
【請求項9】
胎児先進部上で計測された少なくとも1つの点と母体上で計測された少なくとも1つの点との間の距離を計算する過程を含むことを特徴とする請求項1に記載の方法。
【請求項10】
前記母体上の1組の点に対する前記胎児先進部上の点の位置を監視する過程を含むことを特徴とする請求項1に記載の方法。
【請求項11】
分娩進行の指標を計算する過程を含むことを特徴とする請求項1に記載の方法。
【請求項12】
分娩進行の指標を与える過程を含むことを特徴とする請求項1に記載の方法。
【請求項13】
前記各位置が、ある基準に対する3次元空間位置であることを特徴とする請求項1に記載の方法。
【請求項14】
前記位置センサが、ユーザの指に装着されることを特徴とする請求項1に記載の方法。
【請求項15】
前記位置センサが、磁界式センサであることを特徴とする請求項1に記載の方法。
【請求項16】
前記位置センサが、超音波式センサであることを特徴とする請求項1に記載の方法。
【請求項17】
前記母体上の1組の点が、子宮頸管上の点を含み、
子宮頸管端部の両側部の位置を監視する過程を更に含むことを特徴とする請求項1に記載の方法。
【請求項18】
頸管開大度の指標を与える過程を含むことを特徴とする請求項1に記載の方法。
【請求項19】
母体の頸管の位置姿勢の指標を与える過程を含むことを特徴とする請求項1に記載の方法。
【請求項20】
頸管開大度と胎児先進部の下降との相互関係を示すパルトグラムを与える過程を含むことを特徴とする請求項1に記載の方法。
【請求項21】
母体の頸管の展退度を示す過程を含むことを特徴とする請求項1に記載の方法。
【請求項22】
母体の頸管の位置姿勢を示す過程を含むことを特徴とする請求項1に記載の方法。
【請求項23】
前記捕捉された位置を監視することによって母体の子宮頸管の収縮を監視する過程を含むことを特徴とする請求項1に記載の方法。
【請求項24】
少なくとも1つのマッチングプローブを含むキャップを胎児に付ける過程を含むことを特徴とする請求項1に記載の方法。
【請求項25】
分娩進行を監視するための装置であって、
胎児上の1点に取付可能な胎児キーと、
前記胎児キーの形状に対応するような位置キーを含む位置センサと、
前記位置センサの位置を検出することが可能なモニタとを含むことを特徴とする装置。
【請求項26】
前記モニタが、母体の頸管開大度の指標を出力することが可能であることを特徴とする請求項25に記載の装置。
【請求項27】
前記モニタが、前記位置センサの方向を検出することが可能であることを特徴とする請求項25に記載の装置。
【請求項28】
前記モニタが、母体の頸管の位置姿勢の指標を出力することが可能であることを特徴とする請求項25に記載の装置。
【請求項29】
前記モニタが、前記第2の位置センサの位置の指標を出力することが可能であることを特徴とする請求項25に記載の装置。
【請求項30】
前記モニタが、胎児先進部の下降度の指標を出力することが可能であることを特徴とする請求項25に記載の装置。
【請求項31】
前記モニタが、前記位置センサの位置を複数の位置で検出し、そこから母体の一部分に対する胎児の一部分の位置及び方向を計算することが可能であることを特徴とする請求項25に記載の装置。
【請求項32】
前記モニタが、前記位置センサの位置を複数の位置で検出し、そこから頸管の性状を計算することが可能であることを特徴とする請求項25に記載の装置。
【請求項33】
前記モニタが、パルトグラムを出力することが可能であることを特徴とする請求項25に記載の装置。
【請求項34】
前記位置センサが、磁界式センサであることを特徴とする請求項25に記載の装置。
【請求項35】
前記位置センサが、超音波式センサであることを特徴とする請求項25に記載の装置。
【請求項36】
前記胎児キーが取り付けられているようなキャップを含むことを特徴とする請求項25に記載の装置。
【請求項37】
分娩進行を監視する装置であって、
胎児上のある点との付着のため並びに位置及び方向を位置センサに与えるための胎児キー手段と、
前記胎児キーと接続するための位置キー手段を含むような、位置を与えるための位置センサ手段と、
前記位置センサの前記位置を検出するための監視手段とを含むことを特徴とする装置。
【請求項38】
分娩進行を監視する方法であって、
胎児先進部に取り付けられたキーに位置センサを接触させ、かつ前記位置センサの位置及び方向を捕捉する過程と、
母体上の1組の点に前記位置センサを接触させ、かつ各点における前記位置センサの位置及び方向を捕捉する過程と、
胎児と母体の相対位置を計算する過程とを含むことを特徴とする方法。
【請求項39】
分娩進行を監視する方法であって、
胎児先進部に取り付けられたキーに位置センサを接触させ、かつ前記位置センサから位置データを捕捉する過程と、
母体上の1組の点に前記位置センサを接触させ、かつ前記位置センサから位置データを捕捉する過程と、
前記位置データに基づき胎児または母体の分娩進行状況を計算する過程とを含むことを特徴とする方法。
【請求項1】
出産中の分娩進行を監視する方法であって、
胎児先進部上の点に位置センサを接触させ、かつ前記位置センサの位置を捕捉する過程と、
母体上の1組の点に前記位置センサを接触させ、かつ各点における前記位置センサの位置を捕捉する過程と、
前記母体上の1組の点のうちの少なくとも1つの点に対する前記胎児先進部上の点の位置を監視する過程とを含むことを特徴とする方法。
【請求項2】
前記母体上の1組の点のうちの少なくとも1つの点に対する前記胎児先進部上の点の方向を監視する過程を含むことを特徴とする請求項1に記載の方法。
【請求項3】
胎児及び母体上の1組の点での前記位置センサの位置を捕捉する過程を含むことを特徴とする請求項1に記載の方法。
【請求項4】
胎児先進部の1若しくは複数の点にマッチングプローブを取着する過程を含み、
前記マッチングプローブが、前記位置センサのキー部分に対応するようなキー部分を含むことを特徴とする請求項1に記載の方法。
【請求項5】
前記マッチングプローブの前記キー部分が、前記位置センサの前記キー部分に対応する形状を有することを特徴とする請求項1に記載の方法。
【請求項6】
ユーザの意思表示を受け取ることによって前記捕捉を開始する過程を含むことを特徴とする請求項1に記載の方法。
【請求項7】
前記ユーザの意思表示が、マウスをクリックするか或いはスイッチを足踏みするかのいずれか一方によってなされることを特徴とする請求項1に記載の方法。
【請求項8】
母体上で計測された少なくとも2つの点の間の距離を計算する過程を含むことを特徴とする請求項1に記載の方法。
【請求項9】
胎児先進部上で計測された少なくとも1つの点と母体上で計測された少なくとも1つの点との間の距離を計算する過程を含むことを特徴とする請求項1に記載の方法。
【請求項10】
前記母体上の1組の点に対する前記胎児先進部上の点の位置を監視する過程を含むことを特徴とする請求項1に記載の方法。
【請求項11】
分娩進行の指標を計算する過程を含むことを特徴とする請求項1に記載の方法。
【請求項12】
分娩進行の指標を与える過程を含むことを特徴とする請求項1に記載の方法。
【請求項13】
前記各位置が、ある基準に対する3次元空間位置であることを特徴とする請求項1に記載の方法。
【請求項14】
前記位置センサが、ユーザの指に装着されることを特徴とする請求項1に記載の方法。
【請求項15】
前記位置センサが、磁界式センサであることを特徴とする請求項1に記載の方法。
【請求項16】
前記位置センサが、超音波式センサであることを特徴とする請求項1に記載の方法。
【請求項17】
前記母体上の1組の点が、子宮頸管上の点を含み、
子宮頸管端部の両側部の位置を監視する過程を更に含むことを特徴とする請求項1に記載の方法。
【請求項18】
頸管開大度の指標を与える過程を含むことを特徴とする請求項1に記載の方法。
【請求項19】
母体の頸管の位置姿勢の指標を与える過程を含むことを特徴とする請求項1に記載の方法。
【請求項20】
頸管開大度と胎児先進部の下降との相互関係を示すパルトグラムを与える過程を含むことを特徴とする請求項1に記載の方法。
【請求項21】
母体の頸管の展退度を示す過程を含むことを特徴とする請求項1に記載の方法。
【請求項22】
母体の頸管の位置姿勢を示す過程を含むことを特徴とする請求項1に記載の方法。
【請求項23】
前記捕捉された位置を監視することによって母体の子宮頸管の収縮を監視する過程を含むことを特徴とする請求項1に記載の方法。
【請求項24】
少なくとも1つのマッチングプローブを含むキャップを胎児に付ける過程を含むことを特徴とする請求項1に記載の方法。
【請求項25】
分娩進行を監視するための装置であって、
胎児上の1点に取付可能な胎児キーと、
前記胎児キーの形状に対応するような位置キーを含む位置センサと、
前記位置センサの位置を検出することが可能なモニタとを含むことを特徴とする装置。
【請求項26】
前記モニタが、母体の頸管開大度の指標を出力することが可能であることを特徴とする請求項25に記載の装置。
【請求項27】
前記モニタが、前記位置センサの方向を検出することが可能であることを特徴とする請求項25に記載の装置。
【請求項28】
前記モニタが、母体の頸管の位置姿勢の指標を出力することが可能であることを特徴とする請求項25に記載の装置。
【請求項29】
前記モニタが、前記第2の位置センサの位置の指標を出力することが可能であることを特徴とする請求項25に記載の装置。
【請求項30】
前記モニタが、胎児先進部の下降度の指標を出力することが可能であることを特徴とする請求項25に記載の装置。
【請求項31】
前記モニタが、前記位置センサの位置を複数の位置で検出し、そこから母体の一部分に対する胎児の一部分の位置及び方向を計算することが可能であることを特徴とする請求項25に記載の装置。
【請求項32】
前記モニタが、前記位置センサの位置を複数の位置で検出し、そこから頸管の性状を計算することが可能であることを特徴とする請求項25に記載の装置。
【請求項33】
前記モニタが、パルトグラムを出力することが可能であることを特徴とする請求項25に記載の装置。
【請求項34】
前記位置センサが、磁界式センサであることを特徴とする請求項25に記載の装置。
【請求項35】
前記位置センサが、超音波式センサであることを特徴とする請求項25に記載の装置。
【請求項36】
前記胎児キーが取り付けられているようなキャップを含むことを特徴とする請求項25に記載の装置。
【請求項37】
分娩進行を監視する装置であって、
胎児上のある点との付着のため並びに位置及び方向を位置センサに与えるための胎児キー手段と、
前記胎児キーと接続するための位置キー手段を含むような、位置を与えるための位置センサ手段と、
前記位置センサの前記位置を検出するための監視手段とを含むことを特徴とする装置。
【請求項38】
分娩進行を監視する方法であって、
胎児先進部に取り付けられたキーに位置センサを接触させ、かつ前記位置センサの位置及び方向を捕捉する過程と、
母体上の1組の点に前記位置センサを接触させ、かつ各点における前記位置センサの位置及び方向を捕捉する過程と、
胎児と母体の相対位置を計算する過程とを含むことを特徴とする方法。
【請求項39】
分娩進行を監視する方法であって、
胎児先進部に取り付けられたキーに位置センサを接触させ、かつ前記位置センサから位置データを捕捉する過程と、
母体上の1組の点に前記位置センサを接触させ、かつ前記位置センサから位置データを捕捉する過程と、
前記位置データに基づき胎児または母体の分娩進行状況を計算する過程とを含むことを特徴とする方法。
【図1】

【図2】
【図3】
【図4−A】
【図4−B】
【図5】
【図6−A】

【図6−B】

【図6−C】

【図6−D】

【図7】
【図8】
【図9】
【図10−A】
【図10−B】
【図10−C】
【図11】
【図2】
【図3】
【図4−A】
【図4−B】
【図5】
【図6−A】
【図6−B】
【図6−C】
【図6−D】
【図7】
【図8】
【図9】
【図10−A】
【図10−B】
【図10−C】
【図11】
【公表番号】特表2006−505323(P2006−505323A)
【公表日】平成18年2月16日(2006.2.16)
【国際特許分類】
【出願番号】特願2004−549525(P2004−549525)
【出願日】平成15年11月6日(2003.11.6)
【国際出願番号】PCT/IL2003/000928
【国際公開番号】WO2004/041059
【国際公開日】平成16年5月21日(2004.5.21)
【出願人】(505166889)トリグ・メディカル・リミテッド (1)
【氏名又は名称原語表記】TRIG MEDICAL LTD.
【住所又は居所原語表記】POB 538, 36603 Nesher ISRAEL
【Fターム(参考)】
【公表日】平成18年2月16日(2006.2.16)
【国際特許分類】
【出願日】平成15年11月6日(2003.11.6)
【国際出願番号】PCT/IL2003/000928
【国際公開番号】WO2004/041059
【国際公開日】平成16年5月21日(2004.5.21)
【出願人】(505166889)トリグ・メディカル・リミテッド (1)
【氏名又は名称原語表記】TRIG MEDICAL LTD.
【住所又は居所原語表記】POB 538, 36603 Nesher ISRAEL
【Fターム(参考)】
[ Back to top ]