
分散処理システム、車載端末、及び基地局
【課題】 車載端末を計算ノードとする分散処理システムにおいて、処理効率と可用性を両立させる技術を提供する。
【解決手段】 車載端末を計算ノードとする分散処理システムにおいて、基地局が利用できる場合に基地局を管理ノードとして利用する形態(インフラ協調グリッド)と、基地局が利用できない場合に車載端末のいずれかが管理ノードとして機能する形態(車群グリッド)とを、切り替える切り替え手段を設けた。この切り替えは、車群が基地局と通信可能な場合にインフラ協調グリッドに移行させ、車群が基地局と通信不可能になると予測されるときに車群グリッドへと移行させる。この推測は、基地局からの電波の受信電界強度や、車群の位置情報と路側機の通信可能エリアに基づいて行われることが好ましい。
【解決手段】 車載端末を計算ノードとする分散処理システムにおいて、基地局が利用できる場合に基地局を管理ノードとして利用する形態(インフラ協調グリッド)と、基地局が利用できない場合に車載端末のいずれかが管理ノードとして機能する形態(車群グリッド)とを、切り替える切り替え手段を設けた。この切り替えは、車群が基地局と通信可能な場合にインフラ協調グリッドに移行させ、車群が基地局と通信不可能になると予測されるときに車群グリッドへと移行させる。この推測は、基地局からの電波の受信電界強度や、車群の位置情報と路側機の通信可能エリアに基づいて行われることが好ましい。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、分散処理システムに関し、特に車載端末から構成される分散処理システムに関する。
【背景技術】
【0002】
従来、分散処理システムの一形態としてグリッドコンピューティングシステムが知られている。グリッドコンピューティングシステムにおいては、ネットワークを介して複数の情報処理装置を接続し、これらの各情報処理装置に並列して処理を行わせることで、一台一台の情報処理装置の処理能力は低くても、全体として高速な処理が可能となる。あるいは、CPU使用率が低い情報処理装置に処理を割り当てることにより、利用されていない情報処理装置を活用することが可能となる。
【0003】
このようなグリッドコンピューティングシステムにおいては、演算資源として利用可能な情報処理装置に関する情報や、これら情報処理装置の稼働状況などを管理し、適切な情報処理装置に処理を割り当てる管理ノードが必要である。
【0004】
また、このようなグリッドコンピューティングシステムを車載端末で構成し、道路の合流地点における適切な車速を予測するシステムの研究がなされている(非特許文献1)。
【0005】
非特許文献1に記載のグリッドコンピューティングシステムでは、アドホック無線通信によって車載端末がネットワークを形成している。アドホック無線通信とは、アクセスポイントなどを利用せずに車載端末(無線端末)同士が直接通信する通信方式である。
【0006】
また、車両と路側機とが協調して通信を行う路車間通信の技術が知られている。
【非特許文献1】Joey Anda 他4名、"VGrid: Vehicular Ad Hoc Networking and Computing Grid for Intelligent Traffic Control", IEEE Vehicular Technology Conference, Spring 2005, インターネット<http://www.ece.ucdavis.edu/~chuah/paper/2005/vtc05-vgrid.pdf>
【発明の開示】
【発明が解決しようとする課題】
【0007】
路側機(基地局)と車載端末から構成されるグリッドコンピューティングシステムでは、路側機側のリソース(演算資源)を利用することができる。一般に車載端末よりも路側機側のリソースの方が高性能であるため、負荷の高い処理は路側機側に行わせることが効率的である。
【0008】
また、路車間通信は、車車間通信と異なり、アドホックに通信路を設定する必要がないため安定した通信品質が得られる。したがって、路側機がある場合にはこれを活用することにより、システムの安定性を得ることができる。
【0009】
しかしながら、あらゆる場所で車載端末が路側機と通信可能になるように路側機を配置することは経済的にも困難である。したがって、路側機の存在を前提とした分散処理システムでは、システムが利用できない場合(場所)が発生するおそれがある。
【0010】
本発明は上記実情に鑑みてなされたものであって、その目的とするところは、車載端末を計算ノードとする分散処理システムにおいて、処理効率を落とすことなく可用性を高める技術を提供することを目的とする。
【課題を解決するための手段】
【0011】
上記目的を達成するために本発明では、以下の手段又は処理によって分散処理システムを構成する。
【0012】
本発明に係る分散処理システムは、2つの形態をとりうる分散処理システムである。第1の形態は、無線通信によって互いに接続可能な基地局と複数の車載端末から構成され、基地局が管理ノードとして機能し、車載端末が計算ノードとして機能する形態である。つまり、車載端末が基地局と通信可能な場合であり、基地局が管理ノードとして機能する分散処理システムである。なお、基地局は、管理ノードとして機能するとともに、計算ノードとして機能しても良い。
【0013】
ここで、管理ノードは、計算ノードが有する演算資源に関する情報(資源情報)を管理し、この資源情報に基づいて、分散処理システムに投入される処理を適切な計算ノードに割り当てる機能を有する。
【0014】
第2の形態は、無線通信によって互いに接続可能な複数の車載端末から構成され、複数の車載端末のうちの少なくとも1つが管理ノードとして機能し、その他の車載端末が計算ノードとして機能する形態である。つまり、車載端末のみから構成され、一部の車載端末が管理ノードとなり、その他が計算ノードとなる分散処理システムである。なお、管理ノードとして機能する車載端末は、同時に計算ノードとして機能しても良い。
【0015】
本発明に係る分散処理システムは、第2の形態から第1の形態へと切り替える第1の切り替え手段と、第1の形態から第2の形態へと切り替える第2の切り替え手段とを有する。
【0016】
第1の形態と第2の形態との切り替えは、管理ノードとしての機能の有効/無効を車載端末と基地局との間で切り替えることにより行う。具体的には、管理ノードが保持している資源情報を新たな管理ノードに送信する。また、その時点で管理ノードが計算ノードに処理を割り当てている場合はその割り当て状況も新たな管理ノードに送信する。さらに、計算ノードから処理結果を取得している場合には、この処理結果も新たな管理ノードに送信する。そして、新たな管理ノードは管理ノードとしての機能を有効にするとともに、それまで管理ノードであった車載端末又は基地局は管理ノードとしての機能を停止する。
【0017】
第1の切り替え手段は、本分散処理システムが第2の形態のときに、複数の車載端末から形成される車群と基地局とが通信可能であるか判定し、通信可能であると判定された場合に第1の形態へと切り替える。つまり、本分散処理システムに基地局が含まれず車載端末のみから構成されている第2の形態のときに、車群と基地局が通信可能になると基地局が管理ノードとなる第1の形態へと切り替える。
【0018】
ここで、車群とは、無線通信によって直接あるいは他の車載端末を介して互いに通信することができる車両(車載端末)の集まりをいう。すなわち、車群内の車載端末は、直接あるいはホップを介して通信を行うことができる。
【0019】
このように車載端末はホップを介して通信を行うことができるので、車群内の少なくとも1台の車載端末が基地局と直接通信することが可能になれば、車群内の全ての車載端末が基地局と通信することが可能となる。したがって、第1の切り替え手段は、車群内の少なくとも1台の車載端末が基地局と通信可能な場合に、車群と基地局とが通信可能であると判定することができる。ただし、第2の形態のときに管理ノードとして機能する車載端末が基地局と直接通信可能な場合や、車群内の全ての車載端末が基地局と直接通信可能な
場合を、車群と基地局とが通信可能であると判定することもできる。
【0020】
この第1の切り替え手段により、本発明に係る分散処理システムは、車群が基地局と通信可能である場合には、基地局が管理ノードとして機能することになる。つまり、一般的に車載端末よりも高性能である基地局に、処理負荷の高い管理ノードとしての処理を行わせることで、システム全体の効率化が図られる。また、通信頻度の高い車群と管理ノードの間の通信にアドホック通信を使う必要がなくなるため、安定した通信品質を得られ、システム全体の安定が図られる。
【0021】
また、第2の切り替え手段は、本分散処理システムが第1の形態のときに、車群と基地局とが通信不可能になるか予測し、通信不可能になると予測された場合に第2の形態へと切り替える。
【0022】
第2の切り替え手段は、車群内の全ての車載端末が基地局と直接通信できない場合に、車群と基地局とが通信不可能と判定しても良い。また、車群内の所定台数以上の車載端末が基地局と直接通信できない場合に、車群と基地局とが通信不可能と判定しても良い。
【0023】
この第2の切り替え手段により、本発明に係る分散処理システムは、車群が基地局と通信できない場合には、車載端末のみで分散処理システムとして機能することが可能となる。つまり、基地局が存在しない場所においても、分散処理システムとしての機能を損なうことがない。
【0024】
なお、車群と基地局とが通信できなくなってから形態を切り替えると、切り替え後の管理ノードは計算ノードの資源情報等を改めて取得しなければならず効率が悪い。したがって、車群と基地局とが通信できなくなることを予測して、通信できなくなることが予測された場合には、あらかじめ管理ノードである基地局が保持している資源情報などを、新しく管理ノードとして機能する車載端末に送信することで、効率よく形態の切り替えを行うことができる。
【0025】
本発明に係る分散処理システムは、以下の方法により、車群と基地局とが通信不可能となるか予測することが好適である。すなわち、本発明に係る分散処理システムは、車群内の車載端末の位置情報及び走行方向を取得する車両位置情報取得手段と、基地局の通信可能範囲を取得する基地局エリア取得手段とを有し、車群内の車載端末の位置情報及び走行方向と基地局の通信可能範囲に基づいて、第2の切り替え手段は車群と基地局とが通信不可能になることを予測することが好適である。なお、車両位置取得手段と基地局エリア取得手段は、車載端末及び基地局のいずれが有していてもかまわない。
【0026】
車両位置情報取得手段は、GPS(Global Positioning System)などにより車両の位
置情報を取得し、また過去の位置情報の履歴やジャイロ等を用いて走行方向を取得することができる。走行方向は、電子方位計などを用いて取得するように構成しても良い。また、基地局エリア取得手段は、基地局の通信可能範囲をPOI(Point of Interest)情報
として取得する。
【0027】
第2の切り替え手段は、基地局の通信可能範囲と、車群の位置情報及び走行方向を用いて、車群が基地局の通信可能範囲から抜け出るか予測することができる。第2の切り替え手段は、さらに車速センサによって車載端末が搭載される車両の車速を取得し、車速も考慮して予測することも好適である。
【0028】
また、本発明に係る分散処理システムは、以下の方法により、車群と基地局とが通信可能であるか判定又は通信不可能となるか予測することも好適である。すなわち、基地局か
ら発せられる電波の車載端末における受信電界強度に基づいて、第1の切り替え手段は基地局と車群とが通信可能であるか判定し、第2の切り替え手段は基地局と車群とが通信不可能になるか予測することが好適である。
【0029】
ここで、第1の切り替え手段は、基地局からの電波を所定の受信電界強度以上で受信できた場合を、車群と基地局とが通信可能であると判定することが好ましい。また、第2の切り替え手段は、基地局からの電波が所定の受信強度以下になった場合に、車群と基地局とが通信不可能になると判定することが好ましい。また、第2の切り替え手段は、受信電界強度の履歴に基づいて今後の受信電界強度を予測し、受信電界強度が所定の受信強度以下になると予測される場合に、車群と基地局とが通信不可能になると判定することも好ましい。
【0030】
なお、本発明は、上記手段の少なくとも一部を有する車載端末又は基地局として捉えることができる。
【0031】
例えば、本発明の一態様としての車載端末は、無線通信によって互いに接続可能な他の車載端末と車群を形成するとともに、他の車載端末及び基地局と分散処理システムを構成する車載端末であって、自端末が管理ノードとして機能する場合に、計算ノードとして機能する車載端末が有する演算資源に関する情報である資源情報を記憶する資源情報記憶手段と、自端末が管理ノードとして機能しているときに、車群が基地局と通信可能であるか判定し、通信可能であると判定された場合に、資源情報を基地局に送信するとともに、基地局を新たな管理ノードとして機能させる切り替え手段とを有する。
【0032】
上記の態様の車載端末における切り替え手段は、基地局から発せられる電波の受信強度に基づいて上記の判定をすることが好適である。
【0033】
また、本発明の一態様としての車載端末は、無線通信によって互いに接続可能な他の車載端末と車群を形成するとともに、他の車載端末及び基地局と分散処理システムを構成する車載端末であって、自端末が管理ノードとして機能する場合に、計算ノードとして機能する車載端末が有する演算資源に関する情報である資源情報を記憶する資源情報記憶手段と、基地局が管理ノードとして機能しているときに、車群が基地局と通信不可能になるか予測し、通信不可能になると予測された場合に、資源情報を受信するとともに、自端末が新たな管理ノードとして機能する切り替え手段とを有する。
【0034】
上記の態様の車載端末は、車群内の車載端末の位置情報及び走行方向を取得する車両位置情報取得手段と、基地局の通信可能範囲を取得する基地局エリア取得手段とを有し、切り替え手段は、車群内の車載端末の位置情報及び走行方向と、基地局の通信可能範囲に基づいて、車群が基地局と通信不可能になるか予測することが好適である。
【0035】
また、上記の態様の車載端末における切り替え手段は、基地局から発せられる電波の受信電界強度に基づいて、車群が基地局と通信不可能になるか予測することも好適である。
【0036】
さらに、本発明の一態様としての基地局は、無線通信によって互いに接続可能な複数の車載端末と分散処理システムを構成する基地局であって、計算ノードとして機能する車載端末が有する演算資源に関する情報である資源情報を記憶する資源情報記憶手段と、自局が管理ノードとして機能しているときに、前記複数の車載端末から構成される車群と自局とが通信不可能になるか予測し、通信不可能になると予測された場合に、資源情報を前記複数の車載端末のいずれかに送信するとともに、この車載端末を新たな管理ノードとして機能させる切り替え手段とを有する。
【発明の効果】
【0037】
本発明によれば、車載端末を計算ノードとする分散処理システムにおいて、処理効率を落とすことなく可用性を高めることが可能となる。
【発明を実施するための最良の形態】
【0038】
以下に図面を参照して、この発明の好適な実施の形態を例示的に詳しく説明する。
【0039】
<システム概要>
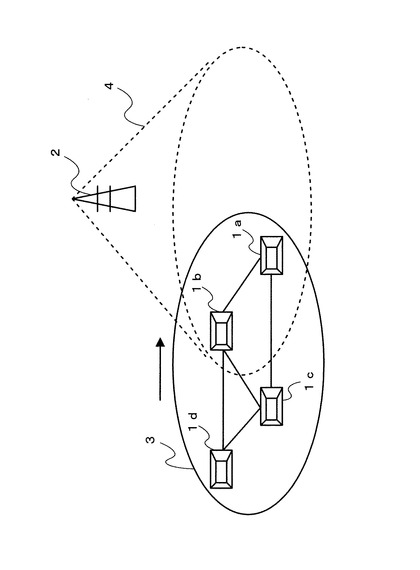
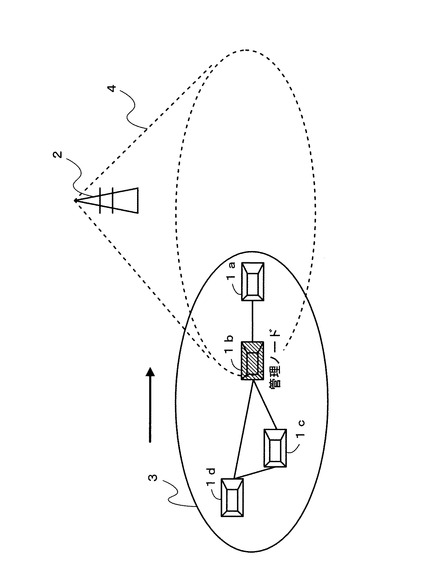
図1及び図2は、本実施形態に係るグリッドコンピューティングシステム(分散処理システム)の形態を示す図である。図1は車載端末と路側機(基地局)とが連携して分散処理システムを構成する形態であり、図2は車載端末のみからグリッドコンピューティングシステムを構成する形態である。
【0040】
図1では、車両1a〜1dは互いに無線通信によって通信可能であり、アドホック無線通信ネットワーク(自律分散協調ネットワーク)を形成している。アドホック無線通信方式では、車両間は直接あるいは他の車両の中継を介して、互いに通信可能である。例えば、車両1aは、車両1b、1cと直接通信可能であり、車両1dとは車両1b又は1cを介して通信することができる。なお、このように無線通信によって互いに通信可能な車両の集まりを車群という。
【0041】
路側機2と直接無線通信できる範囲のことを路側機サービスエリア(基地局エリア)4という。図1では、車群3内の車両のうち、車両1a及び1bが路側機サービスエリア4内に存在する。車両1c、1dは路側機2とは直接通信できないが、車両1a又は1bを介して通信することができる。すなわち、車群内の一部の車両が路側機サービスエリア4内に存在すれば、路側機はアドホック無線通信ネットワークの一員になり、車群内の全ての車両が路側機と通信することができる。
【0042】
図1におけるグリッドコンピューティングシステムの形態では、上記のように車群3と路側機2とが通信可能であり、路側機2が管理ノードとして機能し、車群3内の車両1a〜1dが計算ノードとして機能する。
【0043】
なお、管理ノードは、グリッドコンピューティングシステム内の計算ノードが有する演算資源に関する情報(資源情報)を管理し、この資源情報に基づいてグリッドコンピューティングシステムに処理依頼ノードから依頼される処理を適切な計算ノードに割り当てる。資源情報には、演算資源を提供する期間、計算ノードが有するCPUの能力、CPU稼働状況、空きメモリ、通信速度等の情報が含まれる。また、管理ノードは、可能であれば依頼された処理を複数の演算ジョブに分割して、それぞれを異なる計算ノードに割り当てることで、並列して演算ジョブの実行を行うことができる。さらに、管理ノードは、計算ノードに対する処理の割り当て状況を管理し、計算ノードから得られた処理結果を処理依頼ノードへと通知する。
【0044】
図1のように車両と路側機(インフラ設備)とが協調してグリッドコンピューティングシステムを構成する形態を、以下では「インフラ協調グリッド」という。
【0045】
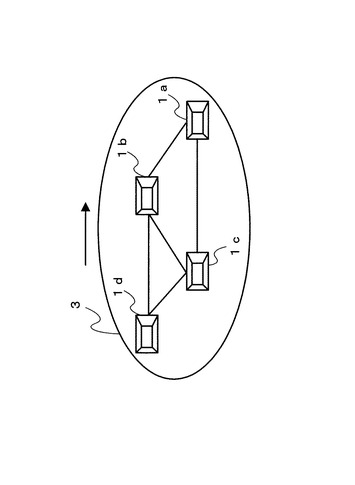
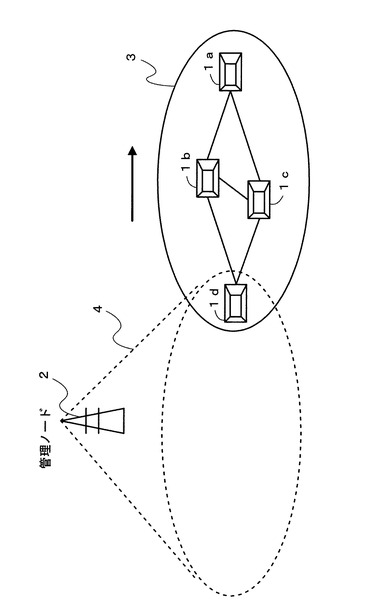
図2は、車両1a〜1dのみからグリッドコンピューティングシステムを構成する例である。車両1a〜1dは、上記と同様にアドホック通信ネットワークにより互いに通信可能であり、車群3を形成している。この場合、車群3内の少なくとも1台の車両が管理ノードとして機能し、その他の車両が計算ノードとして機能する。管理ノードの機能は上述したインフラ協調グリッドの場合と同様である。
【0046】
図2のように車両のみからグリッドコンピューティングシステムを構成する形態を、以下では「車群グリッド」という。
【0047】
なお、上述したインフラ協調グリッド及び車群グリッドのいずれにおいても、管理ノードとして機能する車載端末又は路側機は、計算ノードとして機能しても良く、またグリッドコンピューティングシステムに処理を依頼する処理依頼ノードとして機能しても良い。
【0048】
<ハードウェア構成>
[車載端末のハードウェア構成]
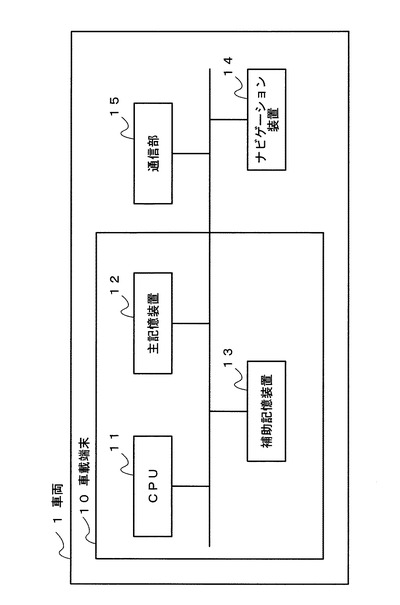
図3は、車両1に搭載される車載端末10の構成を示す図である。車載端末10は、CPU11、RAMなどの主記憶装置12、ハードディスクなどの補助記憶装置13を有する。また、車載端末10は、車両内のナビゲーション装置14や通信部15と接続されており、車両1の位置情報を取得したり、他の車両や路側機などと通信を行うことが可能である。
【0049】
CPU11は、補助記憶装置13に格納されたプログラムを主記憶装置12に読み出して、そのプログラムを実行する。
【0050】
ナビゲーション装置14は、車両1の現在位置や走行方向の取得や、周囲に存在する施設や店舗等に関する情報であるPOI情報を取得する。POI(Point of Interest)情
報には、路側機の存在する場所とその通信可能エリアが含まれ、車載端末10は、ナビゲーション装置14を介して、路側機の通信可能エリアを取得することができる。
【0051】
通信部15は、他の車載端末や路側機と無線通信を行う。他の車載端末や路側機との間の無線通信の方式は、IEEE802.11x等の無線LANや、DSRC(Dedicated Short Range Communication)など、どのような方式であってもかまわない。
【0052】
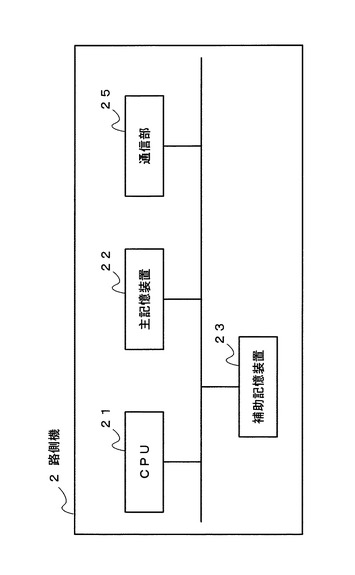
[路側機のハードウェア構成]
図4は、路側機2の構成を示す図である。路側機2は、CPU21、RAMなどの主記憶装置22、ハードディスクなどの補助記憶装置23、及び通信部25を有する。
【0053】
CPU21は、補助記憶装置23に格納されたプログラムを主記憶装置22に読み出して、そのプログラムを実行する。
【0054】
通信部25は、車載端末と無線通信を行う。車載端末との間の無線通信方式は上記と同様である。また、通信部25は有線通信あるいは無線通信によって、他の情報処理装置(固定端末)と接続されても良い。この場合、インフラ協調グリッドにおいて、固定端末を計算ノードとして使用することが可能となる。
【0055】
<機能構成>
[グリッドコンピューティングシステムとしての機能]
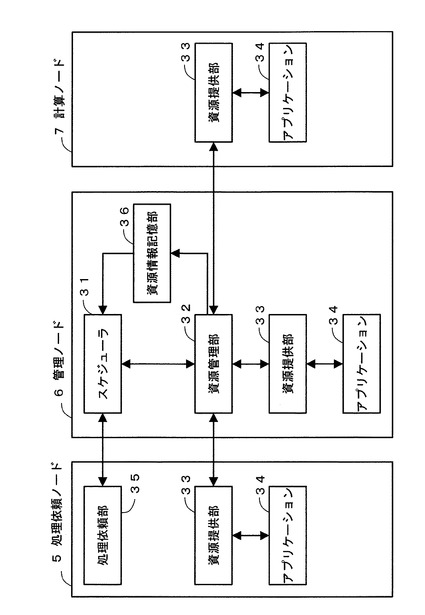
図5は、車載端末10及び路側機2が有する、グリッドコンピューティングに係る機能に関する機能ブロック図である。なお、上述のように、車載端末10及び路側機2のいずれも、管理ノード6、計算ノード7、及び処理依頼ノード5として機能可能であり、したがって、図5に示される機能は全て有する。図5では、説明のために、各車載端末及び路側機が役割に応じて必要とされる機能のみが描かれている。ただし、計算ノードとしての機能は、管理ノード6及び処理依頼ノード5にも描かれている。
【0056】
管理ノード6が有する資源管理部32は、計算ノード7として機能する車載端末及び路側機の演算資源に関する情報を、資源提供部33を介して取得する。資源管理部32が取
得する演算資源に関する情報は、例えば、各車載端末及び路側機が演算資源を提供する期限、CPUの処理能力に関する情報、CPUの稼働状況、空きメモリ容量、通信速度などである。資源管理部32が取得したこれらの資源情報は、資源情報記憶部36に格納される。
【0057】
また、資源管理部32は、後述するスケジューラ31からの指示に従って、演算ジョブを指示された計算ノードの資源提供部33に送信する。
【0058】
資源提供部33は、その車載端末又は路側機が有する演算資源に関する情報を資源管理部32に通知する。また、資源提供部33は、資源管理部32から与えられた演算ジョブを実行する。演算ジョブの実行は、アプリケーション34を計算ノードのCPUが実行することによって行われる。そして、実行結果を資源管理部32に対して送信する。
【0059】
処理依頼ノード5の処理依頼部35は、管理ノード6のスケジューラ31に対して実行すべき処理を依頼する。処理の依頼を受けたスケジューラ31は、可能であれば、その処理を複数の演算ジョブに分割する。1つの演算ジョブは、1台の計算ノードで独立して処理可能であり、依頼された処理を複数の演算ジョブに分割できる場合には、分割することによって並列処理が可能となる。
【0060】
また、スケジューラ31は、資源情報記憶部36に格納された各計算ノードの資源情報に基づいて、各演算ジョブを割り当てる計算ノードを特定する。そして、上述したように、特定した計算ノードに、資源管理部32を介して演算ジョブを実行させる。
【0061】
なお、上述した各機能部は、メモリに格納されたプログラムをCPU11、21が実行することによって実現される。
【0062】
[システム形態切り替えに係る機能]
次に、図6、7を用いて、インフラ協調グリッドと車群グリッドを切り替える処理に係る機能について説明する。
【0063】
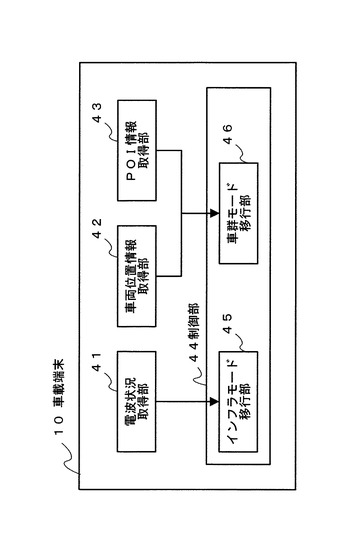
図6は、車載端末10が有する、システム形態切り替え処理に係る機能である。車載端末10は、路側機2から発せられる電波の受信電界強度を取得する電波状況取得部41、車載端末10が搭載された車両1の位置情報及び走行方向を取得する車両位置情報取得部42、路側機2の通信可能エリアを取得するPOI情報取得部43、及びグリッドコンピューティングに係る機能の有効/無効を制御する制御部44を有する。制御部44は、車群グリッドからインフラ協調グリッドへの移行に係るインフラモード移行部45と、インフラグリッドから車群グリッドへの移行に係る車群モード移行部46とを含む。
【0064】
電波状況取得部41は、通信部15における路側機からの受信電界強度を取得する。また、電波状況取得部41は、車群内の他の車両が路側機2から受信する電波の受信電界強度を取得することも望ましい。こうすることで、自車の受信電界強度のみでなく、他の車両の受信電界強度に基づいて、後述する制御部44に対してシステム切り替え処理を要求することができる。
【0065】
車両位置情報取得部42は、ナビゲーション装置14からGPSによって取得された位置情報及び位置情報の履歴から求められる走行方向を取得する。走行方向は、さらにジャイロ等を用いて取得することでより精度を高めることも可能である。また、車両位置情報取得部42は、車群内の他の車両の位置情報及び走行方向を取得することも望ましい。他の車両位置情報及び走行方向は、他の車両が自車に搭載されたナビゲーション装置14から取得した情報を、通信によって取得すればよい。こうすることで、自車が路側機と通信
不可能になるか予測できるだけでなく、車群内の任意の車両が路側機に通信不可能になるか予測することができ、他の車両の通信可能性に基づいて、後述する制御部44に対してシステム切り替え処理を要求することができる。
【0066】
POI情報取得部43は、ナビゲーション装置14にあらかじめ格納されたPOI情報を用いて、車両1が存在する場所近辺の路側機の通信可能エリアを取得する。
【0067】
インフラモード移行部45は、本実施形態に係るグリッドコンピューティングシステムが車群グリッドの形態をとっているときに、電波状況取得部41が路側機2からの電波を所定の受信電界強度以上で受信した場合に、インフラ協調グリッドの形態へと移行させる。なお、上述したように、自車が所定の受信電界強度以上で路側機2からの電波を受信した場合のみでなく、他の車両が所定の受信電界強度以上で路側機2からの電波を受信した場合に、インフラ協調グリッドの形態へと移行させても良い。
【0068】
インフラ協調グリッドへの移行は、管理ノード(車群内のいずれかの車載端末)が保持している資源情報や演算ジョブの割り当て状況、管理ノードが一時的に保持している計算ノードからの処理結果(これらの情報を合わせて、「資源情報等」という)を路側機2に送信し、さらに、路側機2のスケジューラ31や、資源管理部32などの機能を有効にさせることによって行う。なお、路側機2が管理ノードとして機能した後は、それまで管理ノードであった車載端末の管理ノードとしての機能を無効にする。
【0069】
車群モード移行部46は、本実施形態に係るグリッドコンピューティングシステムがインフラ協調グリッドの形態をとっているときに、車両位置情報取得部42から取得される車両の位置情報及び走行方向と、POI情報取得部43から取得される路側機2に通信可能エリアに基づいて、車群が路側機の通信可能エリアから離れることが予測された場合に、車群グリッドの形態へと移行させる。
【0070】
車群グリッドへの移行は、管理ノード(路側機2)が保持している資源情報や演算ジョブの割り当て情報や、管理ノードが一時的に保持している計算ノードからの処理結果を、車群内のいずれかの車載端末に送信し、さらに、その車載端末のスケジューラ31や資源管理部32などの機能を有効にさせることによって行う。
【0071】
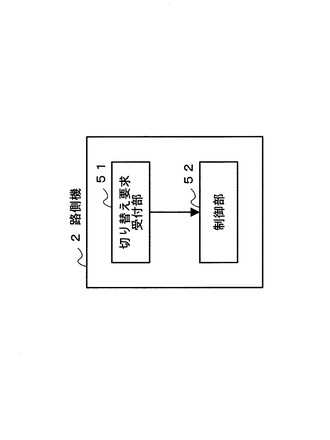
図7は、路側機2が有する、システム切り替え処理に係る機能である。路側機2は、インフラ協調グリッドと車群グリッドの形態を切り替える要求を受け付ける切り替え要求受付部51と、グリッドコンピューティング処理に係る機能の有効・無効を制御する制御部52とを有する。
【0072】
切り替え要求受付部51は、車載端末の制御部44からの切り替え要求を受け付ける。そして、切り替え要求を受け付けた場合にインフラ協調グリッドと車群グリッドとを切り替える。すなわち、インフラ協調グリッドの形態のときに、車載端末から車群グリッドへの切り替え要求を受け付けた場合には、資源情報等を車載端末へ送信し、その後路側機2のスケジューラ31や資源管理部32などの機能を無効にする。また、車群グリッドの形態のときに、車載端末からインフラ協調グリッドへの切り替え要求を受け付けた場合には、資源情報等を車載端末から受信し、その後路側機2のスケジューラ31や資源管理部32などの機能を有効にする。
【0073】
<処理フロー>
[車群グリッドからインフラ協調グリッドへの切り替え処理]
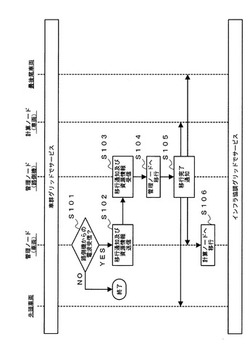
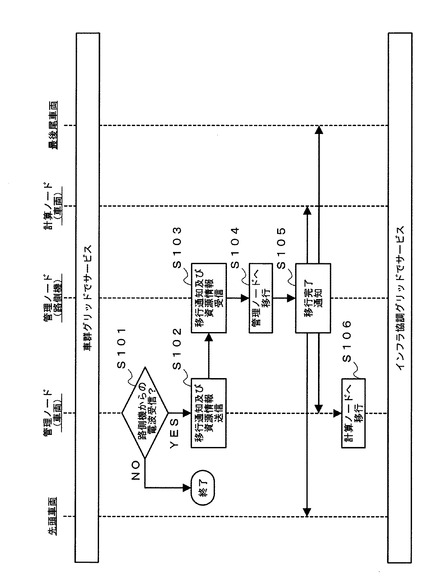
図8は、本実施形態に係るグリッドコンピューティングシステムが、車群グリッドの形態からインフラ協調グリッドに移行する処理を示すフローチャートである。この処理は、
図9に示すように、車群グリッドの形態をとる車群3(図中で右方向に移動)が、路側機2の通信可能エリア4に進入するときに行われる処理である。なお、図9においては、車両1bが管理ノードとして機能している。
【0074】
図8のフローチャートを用いて切り替え処理の内容を説明する。ステップS101で、管理ノードとして機能している車両の電波状況取得部41が、路側機2からの電波を受信したか否か判定する。管理ノードである車両は、所定強度以上の受信電界強度で路側機2からの電波を受信した場合に、ステップS101で肯定判定する。この所定の強度は、安定した通信が行える受信強度以上であることが好適である。
【0075】
ステップS101で、路側機2からの電波を受信していないと判定された場合には、車群3は、インフラ協調グリッドへの切り替えは行わず、処理を終了する。
【0076】
ステップS101において路側機2からの電波を受信したと判定された場合には、ステップS102へ進み、管理ノードのインフラモード移行部45が、路側機2に対してインフラ協調グリッドへの移行通知を送信する。この際、資源情報記憶部36に格納された資源情報等も合わせて送信する。
【0077】
ステップS103で、路側機2は、移行通知と資源情報等とを受信する。受信した資源情報等は、路側機2の資源情報記憶部36に格納される。そして、ステップS104で、路側機2の制御部52が、スケジューラ31や資源管理部32などの機能を有効にし、路側機2が管理ノードとしての機能を開始する。
【0078】
ステップS105で、路側機2は管理ノードとして機能を開始したことを、車群3内の全ての車両に対して通知する。それまで管理ノードとして機能していた車両は、この移行完了通知を受けると、ステップS106で管理ノードとしての機能を無効にし、計算ノードとして機能することとなる。
【0079】
このようにして、車群グリッドからインフラ協調グリッドへの移行が行われる。上記のように、それまで管理ノードとして機能していた車両から資源情報等が路側機2に引き継がれるため、新たに管理ノードとなる路側機2が再び資源情報等を収集する処理を省略することができる。また、管理ノードが移行されたことを通知された車両は、グリッドコンピューティングシステムに処理を依頼するときや、すでに割り当てられているグリッドジョブを返信する際に、路側機2に対してこれらを送信すればよいことが分かり、円滑な移行が実現できる。
【0080】
[インフラ協調グリッドから車群グリッドへの切り替え処理]
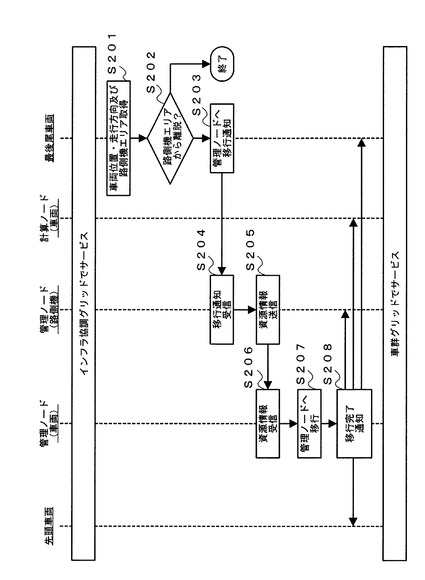
次に、図10、図11を用いてインフラ協調グリッドから車群グリッドへ切り替える処理を説明する。図10は、この切り替え処理を示すフローチャートである。図11に示すように、インフラ協調グリッドの形態をとる車群3が、路側機2の通信可能エリアから離脱するときに行われる処理である。なお、図11においては、路側機2が管理ノードとして機能している。
【0081】
なお、車群内においてどの車両が最後尾の車両であるかは以下のようにして判断できる。すなわち、車群内の各車両がナビゲーション装置14から自車の位置情報及び走行方向を取得し、これらの情報を車群内の全ての車両に対して通知する。したがって、各車両は車群内の全ての車両の位置情報と走行方向を取得する。そして、全車両の位置情報と走行方向とから、最後尾の車両を決定することができる。
【0082】
図10のフローチャートを用いて切り替え処理を詳しく説明する。ステップS201で
、最後尾車両は、車両位置情報取得部42から自車の位置情報及び走行方向を取得し、POI情報取得部43から路側機2の通信可能エリアを取得する。
【0083】
ステップS202で、最後尾車両は、自車が路側機2の通信可能エリアから離脱することが予測されるか判定する。この処理は、自車の位置情報と走行方向から所定時間後の自車の位置を予測し、この予測位置が路側機2の通信可能エリア内にあるか否かによって判定することができる。
【0084】
ステップS202において最後尾車両が路側機2の通信可能エリアから離脱しないと予測された場合には、インフラ協調グリッドの形態を維持できるので、車群グリッドへの切り替え処理は行わず処理を終了する。
【0085】
ステップS202において最後尾車両が路側機2の通信可能エリアから離脱すると予測された場合にはステップS203に進み、車群モード移行部46が路側機2に対して車群グリッドへの移行通知を送信する。
【0086】
ステップS204で、路側機2の切り替え要求受付部51は、車群グリッドへの移行通知を受信する。ステップS205で、路側機2の制御部52は、資源情報記憶部36に格納された資源情報等を新たに管理ノードとして機能する車両に対して送信する。なお、車群グリッドにおいてどの車両が管理ノードになるかは、どのような方法によって決定しても良い。例えば、車群内の先頭車両や最後尾車両を新たな管理ノードとして選択することができる。また、車群の中心付近に位置する車両を新たな管理ノードとして選択することもできる。また、これら以外にも様々な条件を用いて新たな管理ノードを選択しても良い。
【0087】
ステップS206で、新たな管理ノードは資源情報等を受信し、資源情報記憶部36に格納する。そして、ステップS207で、スケジューラ31や資源管理部32などの機能を有効にし、管理ノードとしての機能を有効にする。
【0088】
ステップS208で、新たな管理ノードは、新たな管理ノードに移行したことを車群内の全車両及び路側機2に対して通知する。
【0089】
このようにして、インフラ協調グリッドから車群グリッドへの移行が行われる。上記の処理によると、路側機2と通信不可能なることを予測して切り替え処理を行うことで、路側機と車群とが通信可能なうちにあらかじめ切り替え処理を行うことができる。また、それまで管理ノードとして機能していた路側機2から資源情報等が新たな管理ノードに引き継がれるため、資源情報等を収集する処理を省略することができる。また、管理ノードが移行されたことを通知された車両は、グリッドコンピューティングシステムに処理を依頼するときや、すでに割り当てられているグリッドジョブを返信する際に、路側機2に対してこれらを送信すればよいことが分かり、円滑な移行が実現できる。
【0090】
<実施形態の効果>
本実施形態によると、車群が路側機と通信可能な場合にはインフラ協調グリッドの形態をとることでき、したがって、路側機側に存在する高性能な演算資源を利用することが可能となる。また、路側機が存在しないような場所においては車群グリッドの形態をとることで、グリッドコンピューティングシステムとしての機能を継続することが可能である。したがって、路側機が整備されていないような場所においてもグリッドコンピューティング処理が可能となる。このように、本実施形態では、システムの性能と可用性を同時に向上させることが可能である。
【0091】
また、車群グリッドとインフラ協調グリッドの切り替え処理の際に、管理ノードが有している資源情報等を新たな管理ノードに引き継ぐため再収集する必要がなく、効率的に管理ノードの移行(システム形態の切り替え)を行うことができる。さらに、インフラ協調グリッドから車群グリッドの切り替えの際には、通信不可能になることを予測して切り替えるため、切り替え処理を行うタイミングも最適化される。
【0092】
<変形例>
[車群グリッドからインフラ協調グリッドへの切り替え処理]
上述した実施例では、車群グリッドからインフラ協調グリッドへの切り替えを車群内の管理ノードとして機能している車両が路側機の通信可能エリアに入った場合に行うが、これに限られるものではない。
【0093】
例えば、車群グリッドにおいて先頭車両が路側機の通信可能エリアに入った場合に、切り替え処理を行うようにしても良い。この場合、先頭車両が路側機からの電波を所定の受信強度以上で受信したときに、管理ノードの電波状況取得部41に対して通知を行う。この通知を受けた管理ノードは上述の実施例と同様にインフラ協調グリッドへの切り替え処理を開始する。このような構成をとることで、路側機が利用可能な状況でいち早くインフラ協調グリッドの形態に移行でき、路側機が有する高性能な演算資源が利用可能となり、処理の効率化が図れる。
【0094】
また別の例として、車群内の全ての車両が路側機と直接通信可能になった場合に、切り替え処理を行うようにしても良い。この場合、各車両は路側機からの電波を所定の受信強度以上で受信しているかを、管理ノードとして機能している車両の電波状況取得部41に通知し、管理ノードにおいて車群内の全車両が路側機と直接通信できるか否か判断する。そして、全ての車両が路側機と直接通信可能になった場合に、インフラ協調グリッドへの移行処理を開始する。このような構成をとることで、インフラ協調グリッドに移行した後、全ての車両が中継を介さずに路側機(管理ノード)と直接通信できるため安定した処理が可能となる。
【0095】
[インフラ協調グリッドから車群グリッドへの切り替え処理]
上述した実施例では、車群内の最後尾車両が路側機の通信可能エリアから抜け出ると予測される場合に、インフラ協調グリッドから車群グリッドへの切り替えを行っていたが、これに限られるものではない。
【0096】
例えば、車群内の先頭車両が路側機の通信可能エリアから抜け出ると予測される場合に、切り替え処理を行うようにしても良い。この場合、予測処理(図10におけるステップS201〜S203の処理)は先頭車両において行われることが好ましい。
【0097】
また例えば、車群の中心など所定の車両が路側機の通信可能エリアを抜け出ると予測される場合に切り替え処理を行うようにしても良い。この場合、予測処理(図10におけるステップS201〜S203の処理)は、この所定の車両において行われることが好ましい。
【0098】
また例えば、車群内の車両のうち所定の割合の車両が路側機の通信可能エリアから抜け出ると予測される場合に、切り替え処理を行うようにしても良い。車群内の各車両の位置情報及び走行方向は、車群内の全車両に対して通知されているので、車群内の任意の車両が予測処理を行うことができる。
【0099】
また、先頭車両や最後尾車両など特定の車両が路側機の通信可能エリアから抜け出ることの予測も、その車両において行う必要は必ずしもなく、車群内の任意の車両が行っても
良い。
【0100】
さらに、上記の説明ではいずれの場合も、車両側において、車群と路側機とが通信不可能になることの予測を行っているが、これに限られるものでもなく、路側機において予測を行っても良い。すなわち、車群内の各車両は、自車の位置情報と走行方向を取得し、路側機に通知する。路側機は、車群内の全車両から、各車両の位置情報及び走行方向を取得し、これらの情報と、路側機があらかじめ保持している通信可能エリアに関する情報を基に、上記の推測を行っても良い。
【0101】
なお、この場合も上記と同様に、先頭車両、最後尾車両、中心の車両が路側機と通信不可能になる場合や、所定の数以上の車両が路側機と通信不可能になる場合に、車群と路側機とが通信不可能になると予測することができる。
【0102】
このように、車群グリッドへの切り替えを、車群内の最後尾の車両が路側機の通信可能エリアから抜け出る前に開始することで、切り替え処理の最中に車群が路側機と通信できなくなってしまう可能性を最小限にできる。
【0103】
さらに、車群と路側機が通信不可能になることの予測を、位置情報と走行方向ではなく、路側機から発せられる電波の受信電界強度に基づいて行う構成をとっても良い。すなわち、車両において受信される路側機からの電波が所定の受信電界強度以下になった場合に路側機と通信不可能になると予測することができる。この際、さらに受信電界強度の履歴に基づいて、今後の受信電界強度の推移を予測し、受信電界強度が徐々に弱くなる場合であって所定の受信電界強度以下になる場合に、路側機と通信不可能になると予測することが好ましい。
【0104】
なお、受信電界強度に基づいて車群と路側機が通信不可能になることを予測する場合も、前述の位置情報等に基づいて推測する場合と同様に、先頭車両、最後尾車両、中心の車両など任意の車両において受信電界強度が所定の強度以下になる場合や、車群内の所定の数以上の車両において受信電界強度が所定の強度以下になる場合に、車群と路側機が通信不可能になると予測することができる。
【0105】
このように受信電界強度に基づいて判断するため、天候などの影響によって電波状況が変化するような場合であっても、実際の受信電界強度に基づいて通信可能性を判断するため、適切な判断をすることが可能である。
【0106】
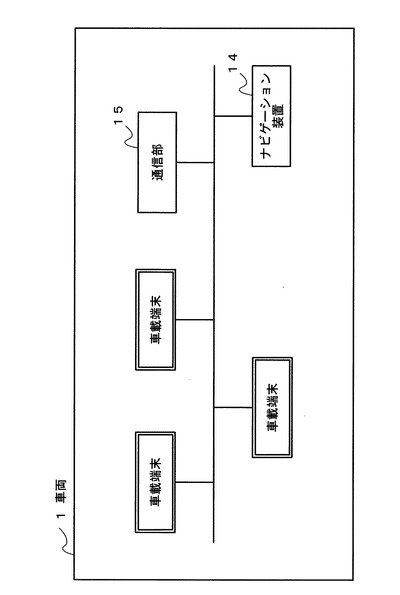
[ハードウェア構成]
上記の実施形態では、車両1内に車載端末10が1台しか存在しなかったが、図12に示すように複数存在しても良い。また、車載端末はプログラムを実行することによってグリッドコンピューティングシステムを構成できるものであれば、どのような種類のものであってもかまわない。例えば、パーソナルコンピュータ、PDA(Personal Digital Assistant)、携帯電話やカーナビゲーション装置、ECU(Electronic Control Unit)な
どが考えられる。
【0107】
各車載端末のうちグリッドコンピューティングシステムにおいて管理ノードとなる機能を有するものが1台のみであっても良く、全ての車載端末が管理ノードとなる機能を有しても良い。
【図面の簡単な説明】
【0108】
【図1】インフラ協調グリッドの形態のときのグリッドコンピューティングシステムのシステム構成を示す図である。
【図2】車群グリッドの形態のときのグリッドコンピューティングシステムのシステム形態を示すである。
【図3】車載端末の構成を示す図である。
【図4】路側機の構成を示す図である。
【図5】車載端末及び路側機のグリッドコンピューティング処理に係る機能の機能ブロックを示す図である。
【図6】車載端末のシステム形態切り替え処理に係る機能の機能ブロック図である。
【図7】路側機のシステム形態切り替え処理に係る機能の機能ブロック図である。
【図8】車群グリッドからインフラ協調グリッドへの切り替え処理の流れを示すフローチャートである。
【図9】車群グリッドからインフラ協調グリッドへの切り替え処理を行うタイミングを説明する図である。
【図10】インフラ協調グリッドから車群グリッドへの切り替え処理の流れを示すフローチャートである。
【図11】インフラ協調グリッドから車群グリッドへの切り替え処理を行うタイミングを説明する図である。
【図12】車両の構成を示す図である。
【符号の説明】
【0109】
1、1a、1b、1c、1d 車両
2 路側機
3 車群
4 通信可能エリア
10 車載端末
11 CPU
12 主記憶装置
13 補助記憶装置
14 ナビゲーション装置
15 通信部
21 CPU
22 主記憶装置
23 補助記憶装置
25 通信部
31 スケジューラ
32 資源管理部
33 資源提供部
34 アプリケーション
35 処理依頼部
36 資源情報記憶部
41 電波状況取得部
42 車両位置情報取得部
43 POI情報取得部
44 制御部
45 インフラモード移行部
46 車群モード移行部
51 切り替え要求受付部
52 制御部
【技術分野】
【0001】
本発明は、分散処理システムに関し、特に車載端末から構成される分散処理システムに関する。
【背景技術】
【0002】
従来、分散処理システムの一形態としてグリッドコンピューティングシステムが知られている。グリッドコンピューティングシステムにおいては、ネットワークを介して複数の情報処理装置を接続し、これらの各情報処理装置に並列して処理を行わせることで、一台一台の情報処理装置の処理能力は低くても、全体として高速な処理が可能となる。あるいは、CPU使用率が低い情報処理装置に処理を割り当てることにより、利用されていない情報処理装置を活用することが可能となる。
【0003】
このようなグリッドコンピューティングシステムにおいては、演算資源として利用可能な情報処理装置に関する情報や、これら情報処理装置の稼働状況などを管理し、適切な情報処理装置に処理を割り当てる管理ノードが必要である。
【0004】
また、このようなグリッドコンピューティングシステムを車載端末で構成し、道路の合流地点における適切な車速を予測するシステムの研究がなされている(非特許文献1)。
【0005】
非特許文献1に記載のグリッドコンピューティングシステムでは、アドホック無線通信によって車載端末がネットワークを形成している。アドホック無線通信とは、アクセスポイントなどを利用せずに車載端末(無線端末)同士が直接通信する通信方式である。
【0006】
また、車両と路側機とが協調して通信を行う路車間通信の技術が知られている。
【非特許文献1】Joey Anda 他4名、"VGrid: Vehicular Ad Hoc Networking and Computing Grid for Intelligent Traffic Control", IEEE Vehicular Technology Conference, Spring 2005, インターネット<http://www.ece.ucdavis.edu/~chuah/paper/2005/vtc05-vgrid.pdf>
【発明の開示】
【発明が解決しようとする課題】
【0007】
路側機(基地局)と車載端末から構成されるグリッドコンピューティングシステムでは、路側機側のリソース(演算資源)を利用することができる。一般に車載端末よりも路側機側のリソースの方が高性能であるため、負荷の高い処理は路側機側に行わせることが効率的である。
【0008】
また、路車間通信は、車車間通信と異なり、アドホックに通信路を設定する必要がないため安定した通信品質が得られる。したがって、路側機がある場合にはこれを活用することにより、システムの安定性を得ることができる。
【0009】
しかしながら、あらゆる場所で車載端末が路側機と通信可能になるように路側機を配置することは経済的にも困難である。したがって、路側機の存在を前提とした分散処理システムでは、システムが利用できない場合(場所)が発生するおそれがある。
【0010】
本発明は上記実情に鑑みてなされたものであって、その目的とするところは、車載端末を計算ノードとする分散処理システムにおいて、処理効率を落とすことなく可用性を高める技術を提供することを目的とする。
【課題を解決するための手段】
【0011】
上記目的を達成するために本発明では、以下の手段又は処理によって分散処理システムを構成する。
【0012】
本発明に係る分散処理システムは、2つの形態をとりうる分散処理システムである。第1の形態は、無線通信によって互いに接続可能な基地局と複数の車載端末から構成され、基地局が管理ノードとして機能し、車載端末が計算ノードとして機能する形態である。つまり、車載端末が基地局と通信可能な場合であり、基地局が管理ノードとして機能する分散処理システムである。なお、基地局は、管理ノードとして機能するとともに、計算ノードとして機能しても良い。
【0013】
ここで、管理ノードは、計算ノードが有する演算資源に関する情報(資源情報)を管理し、この資源情報に基づいて、分散処理システムに投入される処理を適切な計算ノードに割り当てる機能を有する。
【0014】
第2の形態は、無線通信によって互いに接続可能な複数の車載端末から構成され、複数の車載端末のうちの少なくとも1つが管理ノードとして機能し、その他の車載端末が計算ノードとして機能する形態である。つまり、車載端末のみから構成され、一部の車載端末が管理ノードとなり、その他が計算ノードとなる分散処理システムである。なお、管理ノードとして機能する車載端末は、同時に計算ノードとして機能しても良い。
【0015】
本発明に係る分散処理システムは、第2の形態から第1の形態へと切り替える第1の切り替え手段と、第1の形態から第2の形態へと切り替える第2の切り替え手段とを有する。
【0016】
第1の形態と第2の形態との切り替えは、管理ノードとしての機能の有効/無効を車載端末と基地局との間で切り替えることにより行う。具体的には、管理ノードが保持している資源情報を新たな管理ノードに送信する。また、その時点で管理ノードが計算ノードに処理を割り当てている場合はその割り当て状況も新たな管理ノードに送信する。さらに、計算ノードから処理結果を取得している場合には、この処理結果も新たな管理ノードに送信する。そして、新たな管理ノードは管理ノードとしての機能を有効にするとともに、それまで管理ノードであった車載端末又は基地局は管理ノードとしての機能を停止する。
【0017】
第1の切り替え手段は、本分散処理システムが第2の形態のときに、複数の車載端末から形成される車群と基地局とが通信可能であるか判定し、通信可能であると判定された場合に第1の形態へと切り替える。つまり、本分散処理システムに基地局が含まれず車載端末のみから構成されている第2の形態のときに、車群と基地局が通信可能になると基地局が管理ノードとなる第1の形態へと切り替える。
【0018】
ここで、車群とは、無線通信によって直接あるいは他の車載端末を介して互いに通信することができる車両(車載端末)の集まりをいう。すなわち、車群内の車載端末は、直接あるいはホップを介して通信を行うことができる。
【0019】
このように車載端末はホップを介して通信を行うことができるので、車群内の少なくとも1台の車載端末が基地局と直接通信することが可能になれば、車群内の全ての車載端末が基地局と通信することが可能となる。したがって、第1の切り替え手段は、車群内の少なくとも1台の車載端末が基地局と通信可能な場合に、車群と基地局とが通信可能であると判定することができる。ただし、第2の形態のときに管理ノードとして機能する車載端末が基地局と直接通信可能な場合や、車群内の全ての車載端末が基地局と直接通信可能な
場合を、車群と基地局とが通信可能であると判定することもできる。
【0020】
この第1の切り替え手段により、本発明に係る分散処理システムは、車群が基地局と通信可能である場合には、基地局が管理ノードとして機能することになる。つまり、一般的に車載端末よりも高性能である基地局に、処理負荷の高い管理ノードとしての処理を行わせることで、システム全体の効率化が図られる。また、通信頻度の高い車群と管理ノードの間の通信にアドホック通信を使う必要がなくなるため、安定した通信品質を得られ、システム全体の安定が図られる。
【0021】
また、第2の切り替え手段は、本分散処理システムが第1の形態のときに、車群と基地局とが通信不可能になるか予測し、通信不可能になると予測された場合に第2の形態へと切り替える。
【0022】
第2の切り替え手段は、車群内の全ての車載端末が基地局と直接通信できない場合に、車群と基地局とが通信不可能と判定しても良い。また、車群内の所定台数以上の車載端末が基地局と直接通信できない場合に、車群と基地局とが通信不可能と判定しても良い。
【0023】
この第2の切り替え手段により、本発明に係る分散処理システムは、車群が基地局と通信できない場合には、車載端末のみで分散処理システムとして機能することが可能となる。つまり、基地局が存在しない場所においても、分散処理システムとしての機能を損なうことがない。
【0024】
なお、車群と基地局とが通信できなくなってから形態を切り替えると、切り替え後の管理ノードは計算ノードの資源情報等を改めて取得しなければならず効率が悪い。したがって、車群と基地局とが通信できなくなることを予測して、通信できなくなることが予測された場合には、あらかじめ管理ノードである基地局が保持している資源情報などを、新しく管理ノードとして機能する車載端末に送信することで、効率よく形態の切り替えを行うことができる。
【0025】
本発明に係る分散処理システムは、以下の方法により、車群と基地局とが通信不可能となるか予測することが好適である。すなわち、本発明に係る分散処理システムは、車群内の車載端末の位置情報及び走行方向を取得する車両位置情報取得手段と、基地局の通信可能範囲を取得する基地局エリア取得手段とを有し、車群内の車載端末の位置情報及び走行方向と基地局の通信可能範囲に基づいて、第2の切り替え手段は車群と基地局とが通信不可能になることを予測することが好適である。なお、車両位置取得手段と基地局エリア取得手段は、車載端末及び基地局のいずれが有していてもかまわない。
【0026】
車両位置情報取得手段は、GPS(Global Positioning System)などにより車両の位
置情報を取得し、また過去の位置情報の履歴やジャイロ等を用いて走行方向を取得することができる。走行方向は、電子方位計などを用いて取得するように構成しても良い。また、基地局エリア取得手段は、基地局の通信可能範囲をPOI(Point of Interest)情報
として取得する。
【0027】
第2の切り替え手段は、基地局の通信可能範囲と、車群の位置情報及び走行方向を用いて、車群が基地局の通信可能範囲から抜け出るか予測することができる。第2の切り替え手段は、さらに車速センサによって車載端末が搭載される車両の車速を取得し、車速も考慮して予測することも好適である。
【0028】
また、本発明に係る分散処理システムは、以下の方法により、車群と基地局とが通信可能であるか判定又は通信不可能となるか予測することも好適である。すなわち、基地局か
ら発せられる電波の車載端末における受信電界強度に基づいて、第1の切り替え手段は基地局と車群とが通信可能であるか判定し、第2の切り替え手段は基地局と車群とが通信不可能になるか予測することが好適である。
【0029】
ここで、第1の切り替え手段は、基地局からの電波を所定の受信電界強度以上で受信できた場合を、車群と基地局とが通信可能であると判定することが好ましい。また、第2の切り替え手段は、基地局からの電波が所定の受信強度以下になった場合に、車群と基地局とが通信不可能になると判定することが好ましい。また、第2の切り替え手段は、受信電界強度の履歴に基づいて今後の受信電界強度を予測し、受信電界強度が所定の受信強度以下になると予測される場合に、車群と基地局とが通信不可能になると判定することも好ましい。
【0030】
なお、本発明は、上記手段の少なくとも一部を有する車載端末又は基地局として捉えることができる。
【0031】
例えば、本発明の一態様としての車載端末は、無線通信によって互いに接続可能な他の車載端末と車群を形成するとともに、他の車載端末及び基地局と分散処理システムを構成する車載端末であって、自端末が管理ノードとして機能する場合に、計算ノードとして機能する車載端末が有する演算資源に関する情報である資源情報を記憶する資源情報記憶手段と、自端末が管理ノードとして機能しているときに、車群が基地局と通信可能であるか判定し、通信可能であると判定された場合に、資源情報を基地局に送信するとともに、基地局を新たな管理ノードとして機能させる切り替え手段とを有する。
【0032】
上記の態様の車載端末における切り替え手段は、基地局から発せられる電波の受信強度に基づいて上記の判定をすることが好適である。
【0033】
また、本発明の一態様としての車載端末は、無線通信によって互いに接続可能な他の車載端末と車群を形成するとともに、他の車載端末及び基地局と分散処理システムを構成する車載端末であって、自端末が管理ノードとして機能する場合に、計算ノードとして機能する車載端末が有する演算資源に関する情報である資源情報を記憶する資源情報記憶手段と、基地局が管理ノードとして機能しているときに、車群が基地局と通信不可能になるか予測し、通信不可能になると予測された場合に、資源情報を受信するとともに、自端末が新たな管理ノードとして機能する切り替え手段とを有する。
【0034】
上記の態様の車載端末は、車群内の車載端末の位置情報及び走行方向を取得する車両位置情報取得手段と、基地局の通信可能範囲を取得する基地局エリア取得手段とを有し、切り替え手段は、車群内の車載端末の位置情報及び走行方向と、基地局の通信可能範囲に基づいて、車群が基地局と通信不可能になるか予測することが好適である。
【0035】
また、上記の態様の車載端末における切り替え手段は、基地局から発せられる電波の受信電界強度に基づいて、車群が基地局と通信不可能になるか予測することも好適である。
【0036】
さらに、本発明の一態様としての基地局は、無線通信によって互いに接続可能な複数の車載端末と分散処理システムを構成する基地局であって、計算ノードとして機能する車載端末が有する演算資源に関する情報である資源情報を記憶する資源情報記憶手段と、自局が管理ノードとして機能しているときに、前記複数の車載端末から構成される車群と自局とが通信不可能になるか予測し、通信不可能になると予測された場合に、資源情報を前記複数の車載端末のいずれかに送信するとともに、この車載端末を新たな管理ノードとして機能させる切り替え手段とを有する。
【発明の効果】
【0037】
本発明によれば、車載端末を計算ノードとする分散処理システムにおいて、処理効率を落とすことなく可用性を高めることが可能となる。
【発明を実施するための最良の形態】
【0038】
以下に図面を参照して、この発明の好適な実施の形態を例示的に詳しく説明する。
【0039】
<システム概要>
図1及び図2は、本実施形態に係るグリッドコンピューティングシステム(分散処理システム)の形態を示す図である。図1は車載端末と路側機(基地局)とが連携して分散処理システムを構成する形態であり、図2は車載端末のみからグリッドコンピューティングシステムを構成する形態である。
【0040】
図1では、車両1a〜1dは互いに無線通信によって通信可能であり、アドホック無線通信ネットワーク(自律分散協調ネットワーク)を形成している。アドホック無線通信方式では、車両間は直接あるいは他の車両の中継を介して、互いに通信可能である。例えば、車両1aは、車両1b、1cと直接通信可能であり、車両1dとは車両1b又は1cを介して通信することができる。なお、このように無線通信によって互いに通信可能な車両の集まりを車群という。
【0041】
路側機2と直接無線通信できる範囲のことを路側機サービスエリア(基地局エリア)4という。図1では、車群3内の車両のうち、車両1a及び1bが路側機サービスエリア4内に存在する。車両1c、1dは路側機2とは直接通信できないが、車両1a又は1bを介して通信することができる。すなわち、車群内の一部の車両が路側機サービスエリア4内に存在すれば、路側機はアドホック無線通信ネットワークの一員になり、車群内の全ての車両が路側機と通信することができる。
【0042】
図1におけるグリッドコンピューティングシステムの形態では、上記のように車群3と路側機2とが通信可能であり、路側機2が管理ノードとして機能し、車群3内の車両1a〜1dが計算ノードとして機能する。
【0043】
なお、管理ノードは、グリッドコンピューティングシステム内の計算ノードが有する演算資源に関する情報(資源情報)を管理し、この資源情報に基づいてグリッドコンピューティングシステムに処理依頼ノードから依頼される処理を適切な計算ノードに割り当てる。資源情報には、演算資源を提供する期間、計算ノードが有するCPUの能力、CPU稼働状況、空きメモリ、通信速度等の情報が含まれる。また、管理ノードは、可能であれば依頼された処理を複数の演算ジョブに分割して、それぞれを異なる計算ノードに割り当てることで、並列して演算ジョブの実行を行うことができる。さらに、管理ノードは、計算ノードに対する処理の割り当て状況を管理し、計算ノードから得られた処理結果を処理依頼ノードへと通知する。
【0044】
図1のように車両と路側機(インフラ設備)とが協調してグリッドコンピューティングシステムを構成する形態を、以下では「インフラ協調グリッド」という。
【0045】
図2は、車両1a〜1dのみからグリッドコンピューティングシステムを構成する例である。車両1a〜1dは、上記と同様にアドホック通信ネットワークにより互いに通信可能であり、車群3を形成している。この場合、車群3内の少なくとも1台の車両が管理ノードとして機能し、その他の車両が計算ノードとして機能する。管理ノードの機能は上述したインフラ協調グリッドの場合と同様である。
【0046】
図2のように車両のみからグリッドコンピューティングシステムを構成する形態を、以下では「車群グリッド」という。
【0047】
なお、上述したインフラ協調グリッド及び車群グリッドのいずれにおいても、管理ノードとして機能する車載端末又は路側機は、計算ノードとして機能しても良く、またグリッドコンピューティングシステムに処理を依頼する処理依頼ノードとして機能しても良い。
【0048】
<ハードウェア構成>
[車載端末のハードウェア構成]
図3は、車両1に搭載される車載端末10の構成を示す図である。車載端末10は、CPU11、RAMなどの主記憶装置12、ハードディスクなどの補助記憶装置13を有する。また、車載端末10は、車両内のナビゲーション装置14や通信部15と接続されており、車両1の位置情報を取得したり、他の車両や路側機などと通信を行うことが可能である。
【0049】
CPU11は、補助記憶装置13に格納されたプログラムを主記憶装置12に読み出して、そのプログラムを実行する。
【0050】
ナビゲーション装置14は、車両1の現在位置や走行方向の取得や、周囲に存在する施設や店舗等に関する情報であるPOI情報を取得する。POI(Point of Interest)情
報には、路側機の存在する場所とその通信可能エリアが含まれ、車載端末10は、ナビゲーション装置14を介して、路側機の通信可能エリアを取得することができる。
【0051】
通信部15は、他の車載端末や路側機と無線通信を行う。他の車載端末や路側機との間の無線通信の方式は、IEEE802.11x等の無線LANや、DSRC(Dedicated Short Range Communication)など、どのような方式であってもかまわない。
【0052】
[路側機のハードウェア構成]
図4は、路側機2の構成を示す図である。路側機2は、CPU21、RAMなどの主記憶装置22、ハードディスクなどの補助記憶装置23、及び通信部25を有する。
【0053】
CPU21は、補助記憶装置23に格納されたプログラムを主記憶装置22に読み出して、そのプログラムを実行する。
【0054】
通信部25は、車載端末と無線通信を行う。車載端末との間の無線通信方式は上記と同様である。また、通信部25は有線通信あるいは無線通信によって、他の情報処理装置(固定端末)と接続されても良い。この場合、インフラ協調グリッドにおいて、固定端末を計算ノードとして使用することが可能となる。
【0055】
<機能構成>
[グリッドコンピューティングシステムとしての機能]
図5は、車載端末10及び路側機2が有する、グリッドコンピューティングに係る機能に関する機能ブロック図である。なお、上述のように、車載端末10及び路側機2のいずれも、管理ノード6、計算ノード7、及び処理依頼ノード5として機能可能であり、したがって、図5に示される機能は全て有する。図5では、説明のために、各車載端末及び路側機が役割に応じて必要とされる機能のみが描かれている。ただし、計算ノードとしての機能は、管理ノード6及び処理依頼ノード5にも描かれている。
【0056】
管理ノード6が有する資源管理部32は、計算ノード7として機能する車載端末及び路側機の演算資源に関する情報を、資源提供部33を介して取得する。資源管理部32が取
得する演算資源に関する情報は、例えば、各車載端末及び路側機が演算資源を提供する期限、CPUの処理能力に関する情報、CPUの稼働状況、空きメモリ容量、通信速度などである。資源管理部32が取得したこれらの資源情報は、資源情報記憶部36に格納される。
【0057】
また、資源管理部32は、後述するスケジューラ31からの指示に従って、演算ジョブを指示された計算ノードの資源提供部33に送信する。
【0058】
資源提供部33は、その車載端末又は路側機が有する演算資源に関する情報を資源管理部32に通知する。また、資源提供部33は、資源管理部32から与えられた演算ジョブを実行する。演算ジョブの実行は、アプリケーション34を計算ノードのCPUが実行することによって行われる。そして、実行結果を資源管理部32に対して送信する。
【0059】
処理依頼ノード5の処理依頼部35は、管理ノード6のスケジューラ31に対して実行すべき処理を依頼する。処理の依頼を受けたスケジューラ31は、可能であれば、その処理を複数の演算ジョブに分割する。1つの演算ジョブは、1台の計算ノードで独立して処理可能であり、依頼された処理を複数の演算ジョブに分割できる場合には、分割することによって並列処理が可能となる。
【0060】
また、スケジューラ31は、資源情報記憶部36に格納された各計算ノードの資源情報に基づいて、各演算ジョブを割り当てる計算ノードを特定する。そして、上述したように、特定した計算ノードに、資源管理部32を介して演算ジョブを実行させる。
【0061】
なお、上述した各機能部は、メモリに格納されたプログラムをCPU11、21が実行することによって実現される。
【0062】
[システム形態切り替えに係る機能]
次に、図6、7を用いて、インフラ協調グリッドと車群グリッドを切り替える処理に係る機能について説明する。
【0063】
図6は、車載端末10が有する、システム形態切り替え処理に係る機能である。車載端末10は、路側機2から発せられる電波の受信電界強度を取得する電波状況取得部41、車載端末10が搭載された車両1の位置情報及び走行方向を取得する車両位置情報取得部42、路側機2の通信可能エリアを取得するPOI情報取得部43、及びグリッドコンピューティングに係る機能の有効/無効を制御する制御部44を有する。制御部44は、車群グリッドからインフラ協調グリッドへの移行に係るインフラモード移行部45と、インフラグリッドから車群グリッドへの移行に係る車群モード移行部46とを含む。
【0064】
電波状況取得部41は、通信部15における路側機からの受信電界強度を取得する。また、電波状況取得部41は、車群内の他の車両が路側機2から受信する電波の受信電界強度を取得することも望ましい。こうすることで、自車の受信電界強度のみでなく、他の車両の受信電界強度に基づいて、後述する制御部44に対してシステム切り替え処理を要求することができる。
【0065】
車両位置情報取得部42は、ナビゲーション装置14からGPSによって取得された位置情報及び位置情報の履歴から求められる走行方向を取得する。走行方向は、さらにジャイロ等を用いて取得することでより精度を高めることも可能である。また、車両位置情報取得部42は、車群内の他の車両の位置情報及び走行方向を取得することも望ましい。他の車両位置情報及び走行方向は、他の車両が自車に搭載されたナビゲーション装置14から取得した情報を、通信によって取得すればよい。こうすることで、自車が路側機と通信
不可能になるか予測できるだけでなく、車群内の任意の車両が路側機に通信不可能になるか予測することができ、他の車両の通信可能性に基づいて、後述する制御部44に対してシステム切り替え処理を要求することができる。
【0066】
POI情報取得部43は、ナビゲーション装置14にあらかじめ格納されたPOI情報を用いて、車両1が存在する場所近辺の路側機の通信可能エリアを取得する。
【0067】
インフラモード移行部45は、本実施形態に係るグリッドコンピューティングシステムが車群グリッドの形態をとっているときに、電波状況取得部41が路側機2からの電波を所定の受信電界強度以上で受信した場合に、インフラ協調グリッドの形態へと移行させる。なお、上述したように、自車が所定の受信電界強度以上で路側機2からの電波を受信した場合のみでなく、他の車両が所定の受信電界強度以上で路側機2からの電波を受信した場合に、インフラ協調グリッドの形態へと移行させても良い。
【0068】
インフラ協調グリッドへの移行は、管理ノード(車群内のいずれかの車載端末)が保持している資源情報や演算ジョブの割り当て状況、管理ノードが一時的に保持している計算ノードからの処理結果(これらの情報を合わせて、「資源情報等」という)を路側機2に送信し、さらに、路側機2のスケジューラ31や、資源管理部32などの機能を有効にさせることによって行う。なお、路側機2が管理ノードとして機能した後は、それまで管理ノードであった車載端末の管理ノードとしての機能を無効にする。
【0069】
車群モード移行部46は、本実施形態に係るグリッドコンピューティングシステムがインフラ協調グリッドの形態をとっているときに、車両位置情報取得部42から取得される車両の位置情報及び走行方向と、POI情報取得部43から取得される路側機2に通信可能エリアに基づいて、車群が路側機の通信可能エリアから離れることが予測された場合に、車群グリッドの形態へと移行させる。
【0070】
車群グリッドへの移行は、管理ノード(路側機2)が保持している資源情報や演算ジョブの割り当て情報や、管理ノードが一時的に保持している計算ノードからの処理結果を、車群内のいずれかの車載端末に送信し、さらに、その車載端末のスケジューラ31や資源管理部32などの機能を有効にさせることによって行う。
【0071】
図7は、路側機2が有する、システム切り替え処理に係る機能である。路側機2は、インフラ協調グリッドと車群グリッドの形態を切り替える要求を受け付ける切り替え要求受付部51と、グリッドコンピューティング処理に係る機能の有効・無効を制御する制御部52とを有する。
【0072】
切り替え要求受付部51は、車載端末の制御部44からの切り替え要求を受け付ける。そして、切り替え要求を受け付けた場合にインフラ協調グリッドと車群グリッドとを切り替える。すなわち、インフラ協調グリッドの形態のときに、車載端末から車群グリッドへの切り替え要求を受け付けた場合には、資源情報等を車載端末へ送信し、その後路側機2のスケジューラ31や資源管理部32などの機能を無効にする。また、車群グリッドの形態のときに、車載端末からインフラ協調グリッドへの切り替え要求を受け付けた場合には、資源情報等を車載端末から受信し、その後路側機2のスケジューラ31や資源管理部32などの機能を有効にする。
【0073】
<処理フロー>
[車群グリッドからインフラ協調グリッドへの切り替え処理]
図8は、本実施形態に係るグリッドコンピューティングシステムが、車群グリッドの形態からインフラ協調グリッドに移行する処理を示すフローチャートである。この処理は、
図9に示すように、車群グリッドの形態をとる車群3(図中で右方向に移動)が、路側機2の通信可能エリア4に進入するときに行われる処理である。なお、図9においては、車両1bが管理ノードとして機能している。
【0074】
図8のフローチャートを用いて切り替え処理の内容を説明する。ステップS101で、管理ノードとして機能している車両の電波状況取得部41が、路側機2からの電波を受信したか否か判定する。管理ノードである車両は、所定強度以上の受信電界強度で路側機2からの電波を受信した場合に、ステップS101で肯定判定する。この所定の強度は、安定した通信が行える受信強度以上であることが好適である。
【0075】
ステップS101で、路側機2からの電波を受信していないと判定された場合には、車群3は、インフラ協調グリッドへの切り替えは行わず、処理を終了する。
【0076】
ステップS101において路側機2からの電波を受信したと判定された場合には、ステップS102へ進み、管理ノードのインフラモード移行部45が、路側機2に対してインフラ協調グリッドへの移行通知を送信する。この際、資源情報記憶部36に格納された資源情報等も合わせて送信する。
【0077】
ステップS103で、路側機2は、移行通知と資源情報等とを受信する。受信した資源情報等は、路側機2の資源情報記憶部36に格納される。そして、ステップS104で、路側機2の制御部52が、スケジューラ31や資源管理部32などの機能を有効にし、路側機2が管理ノードとしての機能を開始する。
【0078】
ステップS105で、路側機2は管理ノードとして機能を開始したことを、車群3内の全ての車両に対して通知する。それまで管理ノードとして機能していた車両は、この移行完了通知を受けると、ステップS106で管理ノードとしての機能を無効にし、計算ノードとして機能することとなる。
【0079】
このようにして、車群グリッドからインフラ協調グリッドへの移行が行われる。上記のように、それまで管理ノードとして機能していた車両から資源情報等が路側機2に引き継がれるため、新たに管理ノードとなる路側機2が再び資源情報等を収集する処理を省略することができる。また、管理ノードが移行されたことを通知された車両は、グリッドコンピューティングシステムに処理を依頼するときや、すでに割り当てられているグリッドジョブを返信する際に、路側機2に対してこれらを送信すればよいことが分かり、円滑な移行が実現できる。
【0080】
[インフラ協調グリッドから車群グリッドへの切り替え処理]
次に、図10、図11を用いてインフラ協調グリッドから車群グリッドへ切り替える処理を説明する。図10は、この切り替え処理を示すフローチャートである。図11に示すように、インフラ協調グリッドの形態をとる車群3が、路側機2の通信可能エリアから離脱するときに行われる処理である。なお、図11においては、路側機2が管理ノードとして機能している。
【0081】
なお、車群内においてどの車両が最後尾の車両であるかは以下のようにして判断できる。すなわち、車群内の各車両がナビゲーション装置14から自車の位置情報及び走行方向を取得し、これらの情報を車群内の全ての車両に対して通知する。したがって、各車両は車群内の全ての車両の位置情報と走行方向を取得する。そして、全車両の位置情報と走行方向とから、最後尾の車両を決定することができる。
【0082】
図10のフローチャートを用いて切り替え処理を詳しく説明する。ステップS201で
、最後尾車両は、車両位置情報取得部42から自車の位置情報及び走行方向を取得し、POI情報取得部43から路側機2の通信可能エリアを取得する。
【0083】
ステップS202で、最後尾車両は、自車が路側機2の通信可能エリアから離脱することが予測されるか判定する。この処理は、自車の位置情報と走行方向から所定時間後の自車の位置を予測し、この予測位置が路側機2の通信可能エリア内にあるか否かによって判定することができる。
【0084】
ステップS202において最後尾車両が路側機2の通信可能エリアから離脱しないと予測された場合には、インフラ協調グリッドの形態を維持できるので、車群グリッドへの切り替え処理は行わず処理を終了する。
【0085】
ステップS202において最後尾車両が路側機2の通信可能エリアから離脱すると予測された場合にはステップS203に進み、車群モード移行部46が路側機2に対して車群グリッドへの移行通知を送信する。
【0086】
ステップS204で、路側機2の切り替え要求受付部51は、車群グリッドへの移行通知を受信する。ステップS205で、路側機2の制御部52は、資源情報記憶部36に格納された資源情報等を新たに管理ノードとして機能する車両に対して送信する。なお、車群グリッドにおいてどの車両が管理ノードになるかは、どのような方法によって決定しても良い。例えば、車群内の先頭車両や最後尾車両を新たな管理ノードとして選択することができる。また、車群の中心付近に位置する車両を新たな管理ノードとして選択することもできる。また、これら以外にも様々な条件を用いて新たな管理ノードを選択しても良い。
【0087】
ステップS206で、新たな管理ノードは資源情報等を受信し、資源情報記憶部36に格納する。そして、ステップS207で、スケジューラ31や資源管理部32などの機能を有効にし、管理ノードとしての機能を有効にする。
【0088】
ステップS208で、新たな管理ノードは、新たな管理ノードに移行したことを車群内の全車両及び路側機2に対して通知する。
【0089】
このようにして、インフラ協調グリッドから車群グリッドへの移行が行われる。上記の処理によると、路側機2と通信不可能なることを予測して切り替え処理を行うことで、路側機と車群とが通信可能なうちにあらかじめ切り替え処理を行うことができる。また、それまで管理ノードとして機能していた路側機2から資源情報等が新たな管理ノードに引き継がれるため、資源情報等を収集する処理を省略することができる。また、管理ノードが移行されたことを通知された車両は、グリッドコンピューティングシステムに処理を依頼するときや、すでに割り当てられているグリッドジョブを返信する際に、路側機2に対してこれらを送信すればよいことが分かり、円滑な移行が実現できる。
【0090】
<実施形態の効果>
本実施形態によると、車群が路側機と通信可能な場合にはインフラ協調グリッドの形態をとることでき、したがって、路側機側に存在する高性能な演算資源を利用することが可能となる。また、路側機が存在しないような場所においては車群グリッドの形態をとることで、グリッドコンピューティングシステムとしての機能を継続することが可能である。したがって、路側機が整備されていないような場所においてもグリッドコンピューティング処理が可能となる。このように、本実施形態では、システムの性能と可用性を同時に向上させることが可能である。
【0091】
また、車群グリッドとインフラ協調グリッドの切り替え処理の際に、管理ノードが有している資源情報等を新たな管理ノードに引き継ぐため再収集する必要がなく、効率的に管理ノードの移行(システム形態の切り替え)を行うことができる。さらに、インフラ協調グリッドから車群グリッドの切り替えの際には、通信不可能になることを予測して切り替えるため、切り替え処理を行うタイミングも最適化される。
【0092】
<変形例>
[車群グリッドからインフラ協調グリッドへの切り替え処理]
上述した実施例では、車群グリッドからインフラ協調グリッドへの切り替えを車群内の管理ノードとして機能している車両が路側機の通信可能エリアに入った場合に行うが、これに限られるものではない。
【0093】
例えば、車群グリッドにおいて先頭車両が路側機の通信可能エリアに入った場合に、切り替え処理を行うようにしても良い。この場合、先頭車両が路側機からの電波を所定の受信強度以上で受信したときに、管理ノードの電波状況取得部41に対して通知を行う。この通知を受けた管理ノードは上述の実施例と同様にインフラ協調グリッドへの切り替え処理を開始する。このような構成をとることで、路側機が利用可能な状況でいち早くインフラ協調グリッドの形態に移行でき、路側機が有する高性能な演算資源が利用可能となり、処理の効率化が図れる。
【0094】
また別の例として、車群内の全ての車両が路側機と直接通信可能になった場合に、切り替え処理を行うようにしても良い。この場合、各車両は路側機からの電波を所定の受信強度以上で受信しているかを、管理ノードとして機能している車両の電波状況取得部41に通知し、管理ノードにおいて車群内の全車両が路側機と直接通信できるか否か判断する。そして、全ての車両が路側機と直接通信可能になった場合に、インフラ協調グリッドへの移行処理を開始する。このような構成をとることで、インフラ協調グリッドに移行した後、全ての車両が中継を介さずに路側機(管理ノード)と直接通信できるため安定した処理が可能となる。
【0095】
[インフラ協調グリッドから車群グリッドへの切り替え処理]
上述した実施例では、車群内の最後尾車両が路側機の通信可能エリアから抜け出ると予測される場合に、インフラ協調グリッドから車群グリッドへの切り替えを行っていたが、これに限られるものではない。
【0096】
例えば、車群内の先頭車両が路側機の通信可能エリアから抜け出ると予測される場合に、切り替え処理を行うようにしても良い。この場合、予測処理(図10におけるステップS201〜S203の処理)は先頭車両において行われることが好ましい。
【0097】
また例えば、車群の中心など所定の車両が路側機の通信可能エリアを抜け出ると予測される場合に切り替え処理を行うようにしても良い。この場合、予測処理(図10におけるステップS201〜S203の処理)は、この所定の車両において行われることが好ましい。
【0098】
また例えば、車群内の車両のうち所定の割合の車両が路側機の通信可能エリアから抜け出ると予測される場合に、切り替え処理を行うようにしても良い。車群内の各車両の位置情報及び走行方向は、車群内の全車両に対して通知されているので、車群内の任意の車両が予測処理を行うことができる。
【0099】
また、先頭車両や最後尾車両など特定の車両が路側機の通信可能エリアから抜け出ることの予測も、その車両において行う必要は必ずしもなく、車群内の任意の車両が行っても
良い。
【0100】
さらに、上記の説明ではいずれの場合も、車両側において、車群と路側機とが通信不可能になることの予測を行っているが、これに限られるものでもなく、路側機において予測を行っても良い。すなわち、車群内の各車両は、自車の位置情報と走行方向を取得し、路側機に通知する。路側機は、車群内の全車両から、各車両の位置情報及び走行方向を取得し、これらの情報と、路側機があらかじめ保持している通信可能エリアに関する情報を基に、上記の推測を行っても良い。
【0101】
なお、この場合も上記と同様に、先頭車両、最後尾車両、中心の車両が路側機と通信不可能になる場合や、所定の数以上の車両が路側機と通信不可能になる場合に、車群と路側機とが通信不可能になると予測することができる。
【0102】
このように、車群グリッドへの切り替えを、車群内の最後尾の車両が路側機の通信可能エリアから抜け出る前に開始することで、切り替え処理の最中に車群が路側機と通信できなくなってしまう可能性を最小限にできる。
【0103】
さらに、車群と路側機が通信不可能になることの予測を、位置情報と走行方向ではなく、路側機から発せられる電波の受信電界強度に基づいて行う構成をとっても良い。すなわち、車両において受信される路側機からの電波が所定の受信電界強度以下になった場合に路側機と通信不可能になると予測することができる。この際、さらに受信電界強度の履歴に基づいて、今後の受信電界強度の推移を予測し、受信電界強度が徐々に弱くなる場合であって所定の受信電界強度以下になる場合に、路側機と通信不可能になると予測することが好ましい。
【0104】
なお、受信電界強度に基づいて車群と路側機が通信不可能になることを予測する場合も、前述の位置情報等に基づいて推測する場合と同様に、先頭車両、最後尾車両、中心の車両など任意の車両において受信電界強度が所定の強度以下になる場合や、車群内の所定の数以上の車両において受信電界強度が所定の強度以下になる場合に、車群と路側機が通信不可能になると予測することができる。
【0105】
このように受信電界強度に基づいて判断するため、天候などの影響によって電波状況が変化するような場合であっても、実際の受信電界強度に基づいて通信可能性を判断するため、適切な判断をすることが可能である。
【0106】
[ハードウェア構成]
上記の実施形態では、車両1内に車載端末10が1台しか存在しなかったが、図12に示すように複数存在しても良い。また、車載端末はプログラムを実行することによってグリッドコンピューティングシステムを構成できるものであれば、どのような種類のものであってもかまわない。例えば、パーソナルコンピュータ、PDA(Personal Digital Assistant)、携帯電話やカーナビゲーション装置、ECU(Electronic Control Unit)な
どが考えられる。
【0107】
各車載端末のうちグリッドコンピューティングシステムにおいて管理ノードとなる機能を有するものが1台のみであっても良く、全ての車載端末が管理ノードとなる機能を有しても良い。
【図面の簡単な説明】
【0108】
【図1】インフラ協調グリッドの形態のときのグリッドコンピューティングシステムのシステム構成を示す図である。
【図2】車群グリッドの形態のときのグリッドコンピューティングシステムのシステム形態を示すである。
【図3】車載端末の構成を示す図である。
【図4】路側機の構成を示す図である。
【図5】車載端末及び路側機のグリッドコンピューティング処理に係る機能の機能ブロックを示す図である。
【図6】車載端末のシステム形態切り替え処理に係る機能の機能ブロック図である。
【図7】路側機のシステム形態切り替え処理に係る機能の機能ブロック図である。
【図8】車群グリッドからインフラ協調グリッドへの切り替え処理の流れを示すフローチャートである。
【図9】車群グリッドからインフラ協調グリッドへの切り替え処理を行うタイミングを説明する図である。
【図10】インフラ協調グリッドから車群グリッドへの切り替え処理の流れを示すフローチャートである。
【図11】インフラ協調グリッドから車群グリッドへの切り替え処理を行うタイミングを説明する図である。
【図12】車両の構成を示す図である。
【符号の説明】
【0109】
1、1a、1b、1c、1d 車両
2 路側機
3 車群
4 通信可能エリア
10 車載端末
11 CPU
12 主記憶装置
13 補助記憶装置
14 ナビゲーション装置
15 通信部
21 CPU
22 主記憶装置
23 補助記憶装置
25 通信部
31 スケジューラ
32 資源管理部
33 資源提供部
34 アプリケーション
35 処理依頼部
36 資源情報記憶部
41 電波状況取得部
42 車両位置情報取得部
43 POI情報取得部
44 制御部
45 インフラモード移行部
46 車群モード移行部
51 切り替え要求受付部
52 制御部
【特許請求の範囲】
【請求項1】
無線通信によって互いに接続可能な基地局と複数の車載端末から構成され、前記基地局が管理ノードとして機能し、前記複数の車載端末が計算ノードとして機能する第1の形態と、
無線通信によって互いに接続可能な複数の車載端末から構成され、前記複数の車載端末のうちの少なくとも1つが管理ノードとして機能し、その他の車載端末が計算ノードとして機能する第2の形態と、
をとりうる分散処理システムであって、
前記第2の形態のときに、前記複数の車載端末から形成される車群と前記基地局とが通信可能であるか判定し、通信可能であると判定された場合に前記第1の形態に移行させる第1の切り替え手段と、
前記第1の形態のときに、前記車群と前記基地局とが通信不可能になるか予測し、通信不可能になると予測された場合に前記第2の形態に移行させる第2の切り替え手段と、
を有することを特徴とする分散処理システム。
【請求項2】
請求項1に記載の分散処理システムであって、
前記複数の車載端末の位置情報及び走行方向を取得する車両位置情報取得手段と、
前記基地局の通信可能範囲を取得する基地局エリア取得手段と、
を有し、
前記第2の切り替え手段は、前記複数の車載端末の位置情報及び走行方向と、前記基地局の通信可能範囲に基づいて、前記予測をする
ことを特徴とする分散処理システム。
【請求項3】
請求項1に記載の分散処理システムであって、
前記第1の切り替え手段及び/又は前記第2の切り替え手段は、前記基地局から発せられる電波の受信電界強度に基づいて前記判定又は前記予測をする
ことを特徴とする分散処理システム。
【請求項4】
無線通信によって互いに接続可能な他の車載端末と車群を形成するとともに、前記他の車載端末及び基地局と分散処理システムを構成する車載端末であって、
自端末が管理ノードとして機能する場合に、計算ノードとして機能する車載端末が有する演算資源に関する情報である資源情報を記憶する資源情報記憶手段と、
自端末が管理ノードとして機能しているときに、前記車群が前記基地局と通信可能であるか判定し、通信可能であると判定された場合に、前記資源情報を前記基地局に送信するとともに、前記基地局を新たな管理ノードとして機能させる切り替え手段と、
を有する車載端末。
【請求項5】
請求項4に記載の車載端末であって、
前記切り替え手段は、前記基地局から発せられる電波の受信電界強度に基づいて前記判定をする
ことを特徴とする車載端末。
【請求項6】
無線通信によって互いに接続可能な他の車載端末と車群を形成するとともに、前記他の車載端末及び基地局と分散処理システムを構成する車載端末であって、
自端末が管理ノードとして機能する場合に、計算ノードとして機能する車載端末が有する演算資源に関する情報である資源情報を記憶する資源情報記憶手段と、
前記基地局が管理ノードとして機能しているときに、前記車群が前記基地局と通信不可能になるか予測し、通信不可能になると予測された場合に、前記資源情報を前記基地局から受信するとともに、自端末が新たな管理ノードとして機能する切り替え手段と、
を有することを特徴とする車載端末。
【請求項7】
請求項6に記載の車載端末であって、
前記車群内の車載端末の位置情報及び走行方向を取得する車両位置情報取得手段と、
前記基地局の通信可能範囲を取得する基地局エリア取得手段と、
を有し、
前記切り替え手段は、前記複数の車載端末の位置情報及び走行方向と、前記基地局の通信可能範囲に基づいて、前記予測をする
ことを特徴とする車載端末。
【請求項8】
請求項6に記載の車載端末であって、
前記切り替え手段は、前記基地局から発せられる電波の受信電界強度に基づいて前記予測をする
ことを特徴とする車載端末。
【請求項9】
無線通信によって互いに接続可能な複数の車載端末と分散処理システムを構成する基地局であって、
計算ノードとして機能する車載端末が有する演算資源に関する情報である資源情報を記憶する資源情報記憶手段と、
自局が管理ノードとして機能しているときに、前記複数の車載端末から構成される車群と自局とが通信不可能になるか予測し、通信不可能になると予測された場合に、前記資源情報を前記複数の車載端末のいずれかに送信するとともに、該車載端末を新たな管理ノードとして機能させる切り替え手段と、
を有する基地局。
【請求項1】
無線通信によって互いに接続可能な基地局と複数の車載端末から構成され、前記基地局が管理ノードとして機能し、前記複数の車載端末が計算ノードとして機能する第1の形態と、
無線通信によって互いに接続可能な複数の車載端末から構成され、前記複数の車載端末のうちの少なくとも1つが管理ノードとして機能し、その他の車載端末が計算ノードとして機能する第2の形態と、
をとりうる分散処理システムであって、
前記第2の形態のときに、前記複数の車載端末から形成される車群と前記基地局とが通信可能であるか判定し、通信可能であると判定された場合に前記第1の形態に移行させる第1の切り替え手段と、
前記第1の形態のときに、前記車群と前記基地局とが通信不可能になるか予測し、通信不可能になると予測された場合に前記第2の形態に移行させる第2の切り替え手段と、
を有することを特徴とする分散処理システム。
【請求項2】
請求項1に記載の分散処理システムであって、
前記複数の車載端末の位置情報及び走行方向を取得する車両位置情報取得手段と、
前記基地局の通信可能範囲を取得する基地局エリア取得手段と、
を有し、
前記第2の切り替え手段は、前記複数の車載端末の位置情報及び走行方向と、前記基地局の通信可能範囲に基づいて、前記予測をする
ことを特徴とする分散処理システム。
【請求項3】
請求項1に記載の分散処理システムであって、
前記第1の切り替え手段及び/又は前記第2の切り替え手段は、前記基地局から発せられる電波の受信電界強度に基づいて前記判定又は前記予測をする
ことを特徴とする分散処理システム。
【請求項4】
無線通信によって互いに接続可能な他の車載端末と車群を形成するとともに、前記他の車載端末及び基地局と分散処理システムを構成する車載端末であって、
自端末が管理ノードとして機能する場合に、計算ノードとして機能する車載端末が有する演算資源に関する情報である資源情報を記憶する資源情報記憶手段と、
自端末が管理ノードとして機能しているときに、前記車群が前記基地局と通信可能であるか判定し、通信可能であると判定された場合に、前記資源情報を前記基地局に送信するとともに、前記基地局を新たな管理ノードとして機能させる切り替え手段と、
を有する車載端末。
【請求項5】
請求項4に記載の車載端末であって、
前記切り替え手段は、前記基地局から発せられる電波の受信電界強度に基づいて前記判定をする
ことを特徴とする車載端末。
【請求項6】
無線通信によって互いに接続可能な他の車載端末と車群を形成するとともに、前記他の車載端末及び基地局と分散処理システムを構成する車載端末であって、
自端末が管理ノードとして機能する場合に、計算ノードとして機能する車載端末が有する演算資源に関する情報である資源情報を記憶する資源情報記憶手段と、
前記基地局が管理ノードとして機能しているときに、前記車群が前記基地局と通信不可能になるか予測し、通信不可能になると予測された場合に、前記資源情報を前記基地局から受信するとともに、自端末が新たな管理ノードとして機能する切り替え手段と、
を有することを特徴とする車載端末。
【請求項7】
請求項6に記載の車載端末であって、
前記車群内の車載端末の位置情報及び走行方向を取得する車両位置情報取得手段と、
前記基地局の通信可能範囲を取得する基地局エリア取得手段と、
を有し、
前記切り替え手段は、前記複数の車載端末の位置情報及び走行方向と、前記基地局の通信可能範囲に基づいて、前記予測をする
ことを特徴とする車載端末。
【請求項8】
請求項6に記載の車載端末であって、
前記切り替え手段は、前記基地局から発せられる電波の受信電界強度に基づいて前記予測をする
ことを特徴とする車載端末。
【請求項9】
無線通信によって互いに接続可能な複数の車載端末と分散処理システムを構成する基地局であって、
計算ノードとして機能する車載端末が有する演算資源に関する情報である資源情報を記憶する資源情報記憶手段と、
自局が管理ノードとして機能しているときに、前記複数の車載端末から構成される車群と自局とが通信不可能になるか予測し、通信不可能になると予測された場合に、前記資源情報を前記複数の車載端末のいずれかに送信するとともに、該車載端末を新たな管理ノードとして機能させる切り替え手段と、
を有する基地局。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2007−89021(P2007−89021A)
【公開日】平成19年4月5日(2007.4.5)
【国際特許分類】
【出願番号】特願2005−277861(P2005−277861)
【出願日】平成17年9月26日(2005.9.26)
【出願人】(502087460)株式会社トヨタIT開発センター (232)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成19年4月5日(2007.4.5)
【国際特許分類】
【出願日】平成17年9月26日(2005.9.26)
【出願人】(502087460)株式会社トヨタIT開発センター (232)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]