
分析装置と侵入検知装置
【課題】被駆動装置と障害物との衝突を回避することが可能な分析装置と侵入検知装置とを提供すること。
【解決手段】基台1a上に設置された被駆動装置6,7,11と、被駆動装置を開閉自在に覆うカバー1bとを有する分析装置1と侵入検知装置20。分析装置1は、基台1a上を撮像する撮像装置21と、カバーの開放時に撮像装置が撮像した基台上の静止画を記録する静止画格納部と、撮像装置が撮像した基台上の画像と静止画との差分画像を形成する差分画像形成部と、被駆動装置の周囲に差分画像を形成する監視領域を設定する設定部と、差分画像に基づいて監視領域への障害物の侵入を検知する検知部と、検知部が監視領域への障害物の侵入を検知した際に、被駆動装置の駆動を停止させ、又は警報装置を作動させる制御部とを備えている。
【解決手段】基台1a上に設置された被駆動装置6,7,11と、被駆動装置を開閉自在に覆うカバー1bとを有する分析装置1と侵入検知装置20。分析装置1は、基台1a上を撮像する撮像装置21と、カバーの開放時に撮像装置が撮像した基台上の静止画を記録する静止画格納部と、撮像装置が撮像した基台上の画像と静止画との差分画像を形成する差分画像形成部と、被駆動装置の周囲に差分画像を形成する監視領域を設定する設定部と、差分画像に基づいて監視領域への障害物の侵入を検知する検知部と、検知部が監視領域への障害物の侵入を検知した際に、被駆動装置の駆動を停止させ、又は警報装置を作動させる制御部とを備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、分析装置と侵入検知装置に関するものである。
【背景技術】
【0002】
従来、分析装置は、分析動作に伴って検体又は試薬を分注する分注アームや液体を攪拌する攪拌棒、反応容器や分注用チップを移送させるロボットアームのような移送機構(特許文献1参照)等の被駆動装置が駆動されている。このため、従来の分析装置は、障害物が被駆動装置の駆動範囲に侵入して衝突した場合の液体の流出等を含む不具合を回避すべく侵入した障害物と被駆動装置との衝突を検知して被駆動部際、即ち、アームの動作を停止させている(例えば、特許文献2,請求項4参照)。
【0003】
【特許文献1】特開2003−83992号公報
【特許文献2】特開2000−221201号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献2に開示された従来の分析装置は、衝突を前提として障害物の侵入に対する対策としている。一方、分注アームで使用する分注ノズルや液体を攪拌する攪拌棒等の被駆動装置は、キュベットの大きさに対応して非常に小さいことから、障害物と衝突すると分注ノズル等が簡単に曲がってしまう。このため、従来の分析装置は、そのまま動作を続行すると分注ノズル等が折損し、分注量が不正確になる等の問題があり、障害物との衝突を回避することが求められていた。
【0005】
本発明は、上記に鑑みてなされたものであって、被駆動装置と障害物との衝突を回避することが可能な分析装置と侵入検知装置とを提供することを目的とする。
【課題を解決するための手段】
【0006】
上述した課題を解決し、目的を達成するために、請求項1に係る分析装置は、基台上に設置された被駆動装置と、少なくとも被駆動装置を開閉自在に覆うカバーとを有する分析装置において、前記基台上を撮像する撮像装置と、前記カバーの開放時に前記撮像装置が撮像した前記基台上の画像を静止画として記録する静止画記録手段と、前記カバーの開放後、前記撮像装置が撮像した前記基台上の画像と前記静止画との差分画像を形成する差分画像形成手段と、前記被駆動装置の周囲に前記差分画像を形成する監視領域を設定する設定手段と、前記差分画像に基づいて前記監視領域への障害物の侵入を検知する検知手段と、前記検知手段が前記監視領域への障害物の侵入を検知した際に、前記被駆動装置の駆動を停止させ、又は警報装置を作動させる制御手段と、を備えたことを特徴とする。
【0007】
また、請求項2に係る分析装置は、上記の発明において、前記監視領域は、前記基台上の前記被駆動装置の駆動範囲を含む作動範囲外側の所定幅を有する周辺範囲と、前記撮像装置の画角とによって囲まれる領域であることを特徴とする。
【0008】
また、請求項3に係る分析装置は、上記の発明において、前記監視領域は、前記基台上の前記被駆動装置の駆動範囲を含む作動範囲外側と、前記撮像装置の画角とによって囲まれる領域であることを特徴とする。
【0009】
また、請求項4に係る分析装置は、上記の発明において、前記検知手段は、前記監視領域が複数存在する場合には、それぞれの監視領域毎に前記障害物の侵入を検知することを特徴とする。
【0010】
また、請求項5に係る分析装置は、上記の発明において、前記制御手段は、前記障害物が侵入した前記監視領域の被駆動装置のみ、或いは前記複数の監視領域の被駆動装置総ての駆動を停止させることを特徴とする。
【0011】
また、請求項6に係る分析装置は、上記の発明において、前記撮像装置は、前記基台全体を一括して撮像する単一の撮像装置であることを特徴とする。
【0012】
また、請求項7に係る分析装置は、上記の発明において、前記撮像装置は、前記複数の監視領域を個別に撮像する複数の撮像装置であることを特徴とする。
【0013】
また、請求項8に係る分析装置は、上記の発明において、前記撮像装置は、前記カバーの前記基台を臨む位置に設けられていることを特徴とする。
【0014】
また、請求項9に係る分析装置は、上記の発明において、前記撮像装置は、略並行な光軸を有する一対の立体撮像光学系を備えることを特徴とする。
【0015】
また、請求項10に係る分析装置は、上記の発明において、前記撮像装置は、前記基台上に設けた支持部材に設置されていることを特徴とする。
【0016】
また、請求項11に係る分析装置は、上記の発明において、前記撮像装置は、複数台設けられていることを特徴とする。
【0017】
また、請求項12に係る分析装置は、上記の発明において、前記撮像装置は、2台設けられ、一方の撮像装置は、前記カバーの前記基台を臨む位置に設けられ、他方の撮像装置は、前記基台上の前記被駆動装置を水平方向側方から撮像する位置に設けられていることを特徴とする。
【0018】
また、請求項13に係る分析装置は、上記の発明において、前記被駆動装置は、検体又は試薬を分注する分注機構或いは液体を攪拌する攪拌装置であることを特徴とする。
【0019】
また、上述した課題を解決し、目的を達成するために、請求項14に係る分析装置は、基台上に設置され、検体又は試薬を分注する分注機構と、少なくとも前記分注機構を開閉自在に覆うカバーとを有する分析装置において、前記基台上を撮像する撮像装置と、前記カバーの開放時に前記撮像装置が撮像した前記基台上の画像を静止画として記録する静止画記録手段と、前記撮像装置から出力される画像出力と前記静止画記録手段から出力される静止画出力とをもとに前記撮像装置が撮像した画像に基づいて前記分注機構の周囲に設定される監視領域への障害物の侵入を検知する検知手段と、前記検知手段が前記監視領域への障害物の侵入を検知した際に、前記分注機構の駆動を停止させ、又は警報装置を作動させる制御手段と、を備えたことを特徴とする。
【0020】
また、請求項15に係る分析装置は、上記の発明において、さらに、分注された前記検体と試薬とを攪拌する攪拌手段が設けられていることを特徴とする。
【0021】
また、上述した課題を解決し、目的を達成するために、請求項16に係る分析装置は、基台上に設置され、検体又は試薬を分注する分注機構と、少なくとも前記分注機構を開閉自在に覆うカバーとを有する分析ユニットがラックを搬送する搬送装置に沿って複数並列して設けられた分析装置において、前記基台上及び搬送装置上を撮像する撮像装置と、前記カバーの開放時に前記撮像装置が撮像した前記基台上及び搬送装置上の画像を静止画として記録する静止画記録手段と、前記撮像装置から出力される画像出力と前記静止画記録手段から出力される静止画出力とをもとに前記撮像装置が撮像した画像に基づいて前記分注機構の周囲に設定される監視領域への障害物の侵入を検知する検知手段と、前記検知手段が前記監視領域への障害物の侵入を検知した際に、前記分注機構の駆動を停止させ、又は警報装置を作動させる制御手段と、を備えたことを特徴とする。
【0022】
また、上述した課題を解決し、目的を達成するために、請求項17に係る侵入検知装置は、物体を移送する移送機構が駆動される第一の範囲及び当該第一の範囲の外側の第二の範囲を撮像する撮像装置と、前記撮像装置が撮像した前記第一及び第二の範囲の画像を静止画として記録する静止画記録手段と、前記撮像装置から出力される画像出力と前記静止画記録手段から出力される静止画出力とをもとに前記撮像装置が撮像した画像に基づいて前記移送機構の周囲に設定される監視領域への障害物の侵入を検知する検知手段と、を備えたことを特徴とする。
【発明の効果】
【0023】
本発明の侵入検知装置は、監視領域への障害物の侵入を検知する検知手段を備え、本発明の分析装置は、検知手段が監視領域への障害物の侵入を検知した際に、被駆動装置の駆動を停止させ、又は警報装置を作動させる制御手段を備えているので、被駆動装置と障害物との衝突を回避することが可能な分析装置と侵入検知装置とを提供することができる。
【発明を実施するための最良の形態】
【0024】
(実施の形態1)
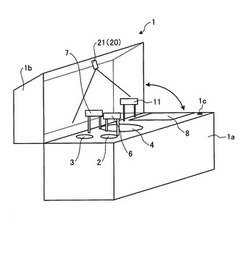
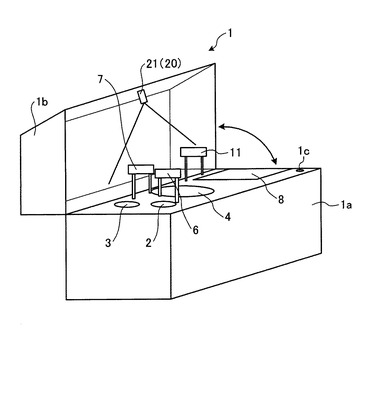
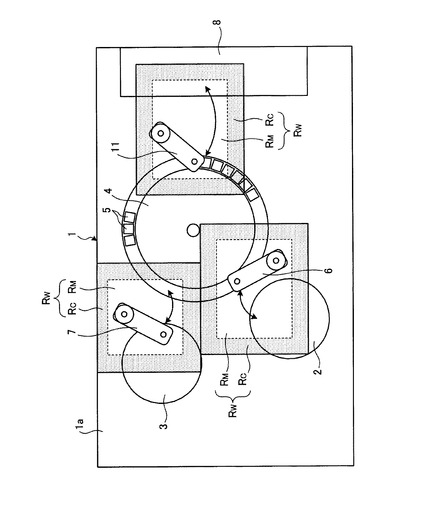
以下、本発明の分析装置と侵入検知装置にかかる実施の形態1について、図面を参照しつつ詳細に説明する。図1は、実施の形態1の自動分析装置の概略構成を示す斜視図である。図2は、図1に示す自動分析装置の基台の平面図を、制御部等を含むブロック図と共に示す図である。図3は、自動分析装置で使用する実施の形態1の侵入検知装置を制御部等と共に示すブロック図である。図4は、自動分析装置の基台上における被駆動装置の作動範囲と周辺範囲を示す模式図である。図5は、侵入検知装置の監視領域の形状と監視領域と障害物との位置関係を模式的に説明する斜視図である。
【0025】
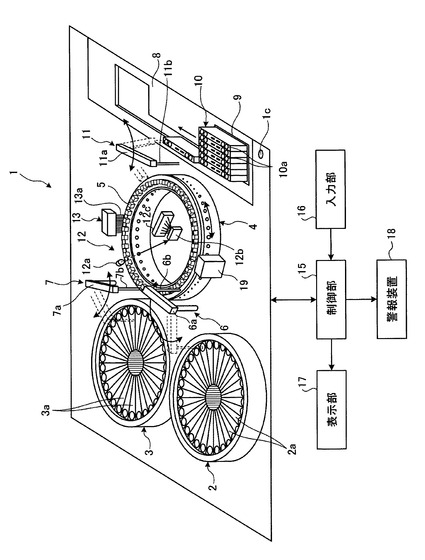
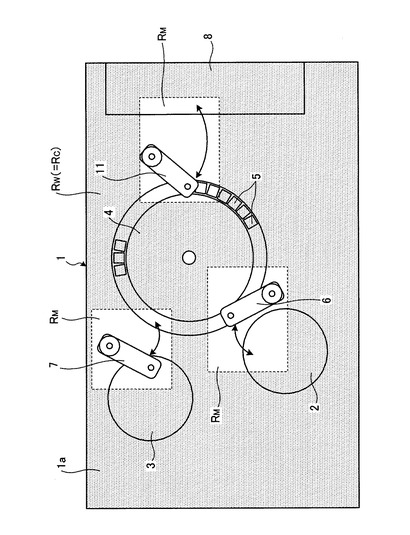
自動分析装置1は、図1及び図2に示すように、基台1a上に試薬テーブル2,3、キュベットホイール4、搬送機構8、分析光学系12、洗浄機構13、制御部15及び攪拌装置19が配置され、障害物の侵入検知装置20を備えている。基台1aは、試薬分注機構6,7及び検体分注機構11を含めて基台1a上を開閉自在に覆うカバー1bが取り付けられ、搬送機構8の近傍にはカバー1bの開閉を検出する近接スイッチ1cが設けられている。一方、カバー1bは、図1に示すように、開いた際に基台1a上を撮像する撮像装置21が取り付けられている。
【0026】
撮像装置21は、基台1a上を撮像する撮像装置であり、撮像した画像を既存の画像処理ソフトによって処理して所望範囲を切り出すことができれば、例えば、光学カメラやTVカメラ、CCDカメラやデジタルビデオカメラ等の電子カメラを使用することができる。
【0027】
試薬テーブル2,3は、図2に示すように、それぞれ周方向に配置される複数の試薬容器2a,3aを保持し、駆動手段に回転されて試薬容器2a,3aを周方向に搬送する。このとき、試薬テーブル2には、第一試薬を保持した試薬容器2aが配置され、試薬テーブル3には、第二試薬を保持した試薬容器3aが配置されている。
【0028】
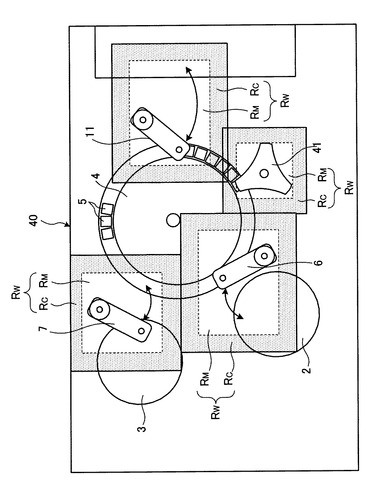
キュベットホイール4は、図2に示すように、周方向に沿って反応容器5を配置する複数のホルダが周方向に形成され、駆動手段によって矢印で示す方向に回転されて反応容器5を搬送する。キュベットホイール4は、各ホルダの下部に対応する位置に半径方向に対向する測光孔が形成されている。反応容器5は、近傍に設けた試薬分注機構6,7によって試薬テーブル2,3の試薬容器2a,3aから試薬が分注される。
【0029】
反応容器5は、分析光学系12から出射された分析光(340〜800nm)に含まれる光を透過する素材、例えば、耐熱ガラスを含むガラス,環状オレフィンやポリスチレン等の合成樹脂から成形された四角筒状の容器である。
【0030】
試薬分注機構6,7は、それぞれ水平面内を矢印方向に回動するアーム6a,7aに試薬を分注するプローブ6b,7bが設けられ、洗浄水によってプローブ6b,7bを洗浄する洗浄手段を有している。試薬分注機構6,7は、駆動モータ6c,7c(図3参照)によってアーム6a,7aが回動される。
【0031】
搬送機構8は、図2に示すように、フィーダ9に配列した複数のラック10を矢印方向に沿って1つずつ搬送する搬送手段であり、ラック10を歩進させながら移送する。ラック10は、検体を収容した複数の検体容器10aを保持している。ここで、検体容器10aは、搬送機構8によって移送されるラック10の歩進が停止するごとに、水平方向に回動するアーム11aとプローブ11bとを有する検体分注機構11によって検体が各反応容器5へ分注される。このため、検体分注機構11は、洗浄水によってプローブ11bを洗浄する洗浄手段を有している。また、検体分注機構11は、駆動モータ11c(図3参照)によってアーム11aが回動される。
【0032】
分析光学系12は、試薬と検体とが反応した反応容器5内の液体試料を分析するための分析光(340〜800nm)を出射するもので、図2に示すように、発光部12a,分光部12b及び受光部12cを有している。発光部12aから出射された分析光は、反応容器5内の液体試料を透過し、分光部12bと対向する位置に設けた受光部12cによって受光される。受光部12cは、制御部15と接続されている。
【0033】
洗浄機構13は、ノズル13aによって反応容器5内の反応液を吸引して廃棄した後、ノズル13aから洗剤や洗浄水等の洗浄液等を繰り返し注入し、吸引することにより、分析光学系12による測光が終了した反応容器5を洗浄する。
【0034】
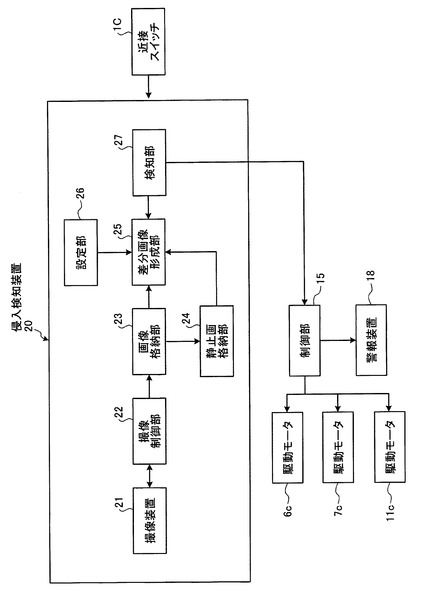
制御部15は、自動分析装置1の各部と電気的に接続されてこれら各部の作動を制御すると共に、発光部12aの出射光量と受光部12cが受光した光量に基づく反応容器5内の液体試料の吸光度に基づいて検体の成分濃度を算出するもので、例えば、マイクロコンピュータ等が使用される。また、制御部15は、検知部27が監視領域へ障害物が侵入したことを検知した際に、試薬分注機構6,7や検体分注機構11を含む被駆動装置の駆動を停止させ、又は警報装置18を作動させる。制御部15は、図2に示すように、入力部16、表示部17及び警報装置18と接続されている。
【0035】
入力部16は、制御部15へ検査項目や試薬,検体の分注指示等を含む検査情報の入力操作をする部分であり、例えば、キーボードやマウス等が使用される。入力部16から入力された検査項目や試薬,検体の分注指示等を含む検査情報は制御部15に記憶される。表示部17は、分析内容や警報等を表示するもので、ディスプレイパネル等が使用される。ここで、分析装置1は、表示部17が警報を表示する際、アラームを発する警報装置18(図3参照)を備えている。
【0036】
攪拌装置19は、音波(表面弾性波)によって反応容器5に分注された試薬と検体の混合液を非接触で攪拌させる攪拌装置である。
【0037】
侵入検知装置20は、カバー1bを開いた際に起動され、試薬分注機構6,7や検体分注機構11等の被駆動装置の周囲に形成される監視領域への障害物の侵入を検知するもので、図3に示すように、上述の撮像装置21の他、撮像制御部22、画像格納部23、静止画格納部24、差分画像形成部25、設定部26及び検知部27を有している。
【0038】
撮像制御部22は、撮像装置21が撮像した基台1a上の画像データを電子データへ置換する。このとき、撮像制御部22は、撮像装置21が撮像した基台1a上の画像の電子データを画像格納部23と静止画格納部24へ出力する。
【0039】
画像格納部23は、撮像装置21が撮像した基台1a上の動画の電子データを記録する。静止画格納部24は、カバー1bの開放時に撮像装置21が撮像した基台1a上の電子データを静止画として格納する。
【0040】
差分画像形成部25は、静止画格納部24に格納された静止画の電子データと、画像格納部23に記録される撮像装置21が撮像した基台1a上の動画の電子データとをもとに、画像の中から監視領域を切り出すと共に、差分画像を形成する画像処理を行い、監視領域に関して画像データの1フレーム毎に差分画像を形成する。
【0041】
設定部26は、試薬分注機構6,7や検体分注機構11の周囲に各被駆動装置毎に監視領域を設定する設定手段である。設定部26は、監視領域を設定するため、基台1a上の画像に関して被駆動装置の駆動範囲を含む作動範囲外側の所定幅を有する周辺範囲を設定する。即ち、撮像装置21が撮像した基台1a上の画像を示す図4において、被駆動装置である試薬分注機構6,試薬分注機構7及び検体分注機構11のそれぞれについて駆動範囲(矢印参照)を含む作動範囲RMと、作動範囲RM及び作動範囲RM外側の所定幅を有する周辺範囲RCを包含する警戒範囲RWとを個々に設定する。このとき、設定部26による作動範囲RMや警戒範囲RWの設定は、表示部17に表示された基台1a上の画像を見ながらオペレータがマウス等を利用して入力部16から設定する。
【0042】
この後、カバー1bの開の間、差分画像形成部25は、画像格納部23に記録される画像データ、即ち、撮像装置21による基台1a上の動画像データの1フレーム毎に、動画像データの周辺範囲RCの画像と、静止画格納部24に格納された静止画における周辺範囲RCの画像との差に基づく画像を作成する。
【0043】
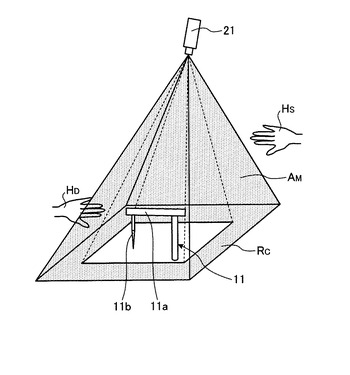
従って、差分画像形成部25が形成する周辺範囲RCに関する差分画像は、例えば、検体分注機構11に関しては、図5に示すように、基台1a上の周辺範囲RCと周辺範囲RCを見込む撮像装置21の画角とによって囲まれる四角錐形状の筒からなる領域(=監視領域AM)となる。この四角錐形状の筒からなる監視領域AMの形状は、他の試薬分注機構6や試薬分注機構7も同様である。このように、設定部26によって周辺範囲RCや警戒範囲RWを設定することにより、差分画像形成部25が差分画像を形成し、差分画像を形成した領域が障害物の侵入を監視する監視領域AMとなる。
【0044】
検知部27は、差分画像形成部25が形成した差分画像をもとに監視領域AMへ障害物が侵入したか否かを検知する。このとき、検知部27は、差分画像中の予め設定した所定の大きさ以上の物体を障害物として侵入の有無を検知する。なお、監視領域AMには、試薬テーブル2,3における試薬容器2a,3aの搬送路及びキュベットホイール4における反応容器5の搬送路がかかっているが、通常、蓋が閉っているため、差分画像として形成されることはない。
【0045】
以上のように構成される自動分析装置1は、回転するキュベットホイール4によって周方向に沿って搬送されてくる複数の反応容器5に試薬分注機構6が試薬容器2aから第一試薬を順次分注する。第一試薬が分注された反応容器5は、検体分注機構11によってラック10に保持された複数の検体容器10aから検体が順次分注される。そして、キュベットホイール4が停止する都度、反応容器5に分注された第一試薬と検体が攪拌装置19によって順次攪拌されて反応する。攪拌後、キュベットホイール4が回転され、反応容器5の反応液に試薬分注機構7によって試薬容器3aから第二試薬が順次分注され、再度、攪拌装置19によって攪拌される。
【0046】
自動分析装置1においては、通常、試薬の量に比べて検体の量が少なく、攪拌によって液体中に生ずる一連の流れによって反応容器5に分注された少量の検体が多量の試薬に引き込まれて検体と試薬との反応が促進される。このようにして検体と試薬が反応した反応液を保持した反応容器5は、キュベットホイール4が再び回転したときに分析光学系12を通過し、発光部12aから出射された光束が透過する。このとき、反応容器5が保持した反応液は、受光部12cで側光され、制御部15によって成分濃度等が分析される。そして、分析が終了した反応容器5は、洗浄機構13によって洗浄された後、再度検体の分析に使用される。
【0047】
このとき、自動分析装置1は、試薬切れ等によって試薬容器を交換する必要が生ずる。このような場合、自動分析装置1は、カバー1bを開いて試薬容器を交換し、試薬交換に伴うキャリブレーション等のメンテナンス操作を行う。このため、自動分析装置1は、メンテナンス操作に伴ってオペレータが試薬分注機構6,7や検体分注機構11の被駆動装置を作動させながら基台1a上でメンテナンス作業を行う。従って、メンテナンス作業の際にオペレータの手等が被駆動装置の作動範囲RMに侵入することがある。
【0048】
本発明の侵入検知装置20は、このような場合を想定して被駆動装置と障害物との衝突を回避することを可能にするものである。即ち、侵入検知装置20は、図5に示すように、オペレータの手HSが検体分注機構11に接近しても監視領域AMの外部にある場合には、検知部27は障害物の侵入を検知しない。これに対し、オペレータの手HDが検体分注機構11に接近し、監視領域AM内に侵入した場合、差分画像には侵入した手HDに対応する大きさの画像が表示される。このため、検知部27は、差分画像をもとに障害物(=手HD)が侵入したと検知し、制御部16に検知信号を出力する。
【0049】
これにより、制御部16は、停止信号を検体分注機構11に出力して駆動モータ11cの駆動を停止し、表示部17にその旨の警報を表示すると共に、警報装置18からアラームを発する。このため、自動分析装置1は、オペレータの手HDが検体分注機構11のアーム11aに衝突したり、手HDがプローブ11bと衝突して曲げたりする事故を回避することができる。このとき、制御部16は、検体分注機構11の他、試薬分注機構6,7も停止させてもよい。
【0050】
上述のように、自動分析装置1は、侵入検知装置20の差分画像形成部25が形成する差分画像に基づいて検知部27が監視領域への障害物の侵入を検知すると、制御部16による制御の下に、試薬分注機構6,7や検体分注機構11等の被駆動装置の駆動が停止される。このため、自動分析装置1は、侵入検知装置20を使用することによって、駆動される試薬分注機構6,7や検体分注機構11等と障害物との衝突を適切に回避することができる。
【0051】
特に、本発明の侵入検知装置20は、撮像装置21によって基台1a上を一括して撮像した画像を処理することにより監視領域へ侵入する障害物を検知している。このため、侵入検知装置20は、複数の光センサによって被駆動装置の周囲に監視領域を形成する場合に比べると、少なくとも撮像装置21が1台あれば良いので、非常に簡単な構造とすることができる。
【0052】
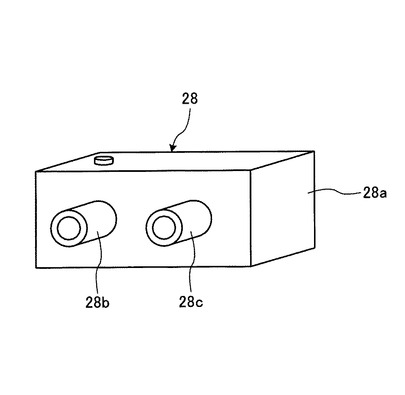
ここで、侵入検知装置20は、撮像装置21として、図6に示すステレオカメラ28を使用してもよい。ステレオカメラ28は、本体28aに撮像倍率が同じ撮像レンズ系28b,28cが設けられている。侵入検知装置20は、ステレオカメラ28を使用すると、障害物を3次元で検出することができるので、障害物の位置検出精度が向上する。
【0053】
特に、図5において、例えば、オペレータの手HSが監視領域AM内に侵入したとしても、この高さを保持して侵入するのであれば、アーム11aやプローブ11bと衝突することがなく、何ら危険はない。即ち、オペレータの手HSが、監視領域AM内の回動するアーム11aの上方へ侵入する場合には、検体分注機構11の駆動を停止する必要はない。このため、侵入検知装置20は、ステレオカメラ28を使用すると、被駆動装置の駆動停止やアラームの発生に関してより一層きめの細かい制御が可能になる。
【0054】
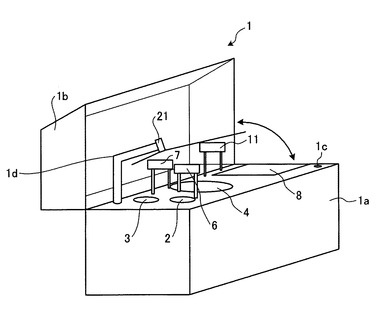
また、撮像装置21は、カバー1bに取り付ける他に、図7に示すように、基台1a上に設けた支持部材1dに設置してもよい。このようにすると、自動分析装置1は、撮像装置21を設けるうえで、設計上の自由度が増す。
【0055】
更に、基台1a上に撮像装置21を設置し、撮像装置21により横(水平)方向からの撮影画像を用い、上記と同様に、被駆動装置の作動範囲RMと周辺範囲RCとを設定する。そして、作動範囲RMにおける画像格納部23と静止画格納部24の画像データに基づく差分画像形成部25による差分画像に基づいて検知部27によって監視領域AMへの障害物の侵入を監視するようにしてもよい。
【0056】
また、撮像装置21は、撮影光軸をカバー1b側に向けて基台1a上に設置し、カバー1bに反射鏡を設けることにより、前記反射鏡を介して被駆動装置を撮影するようにしてもよい。この場合、上方から撮影した像によって監視領域AMへの障害物の侵入を監視しながら、自動分析装置1を小型化し、且つ、カバー1bの開閉による撮像装置21の故障等を防ぐことができる。
【0057】
更に、侵入検知装置20は、設定部26によって画像格納部23及び静止画格納部24に格納される画像自体を監視領域AMの範囲内に設定してもよい。
【0058】
また、監視領域AMの形状を決める周辺範囲RCは、撮像装置21の画角が十分大きければ、図8に示すように、基台1a上の試薬分注機構6,7及び検体分注機構11の作動範囲RMの外側全体としてもよい。このようにすると、図5に示す監視領域AMが、試薬分注機構6,7及び検体分注機構11の作動範囲RMの外側全体とこの範囲全体を見込む撮像装置21の画角とによって囲まれる領域に広がり、オペレータは、試薬分注機構6,7及び検体分注機構11との衝突を回避して安心してメンテナンス作業を行うことができる。
【0059】
一方、実施の形態1の自動分析装置1は、被駆動装置として試薬分注機構6,7や検体分注機構11を使用した。但し、被駆動装置は、これらに限定されるものではなく、例えば、試薬容器2a,3a,反応容器5、検体容器10a或いは図示しない分注チップ等を搬送する搬送手段であってもよい。
【0060】
(実施の形態2)
次に、本発明の分析装置と侵入検知装置にかかる実施の形態2について、図面を参照しつつ詳細に説明する。実施の形態1の自動分析装置は、1台の撮像装置を使用したのに対し、実施の形態2の自動分析装置は、撮像装置を複数設け、個々の監視領域への障害物の侵入を1台の撮像装置で被駆動装置ごとに監視している。
【0061】
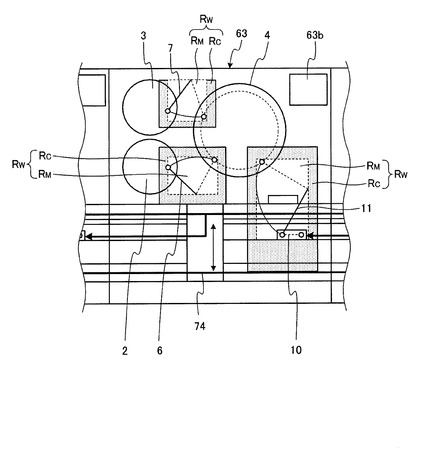
図9は、実施の形態2の自動分析装置の概略構成を示す斜視図である。図10は、自動分析装置の基台上における被駆動装置の作動範囲と周辺範囲と、各撮像装置が監視する警戒範囲とを示す模式図である。ここで、以下に説明する各実施の形態においては、実施の形態1の自動分析装置1及び侵入検知装置20と同一の構成部材には同一の符号を付して説明している。
【0062】
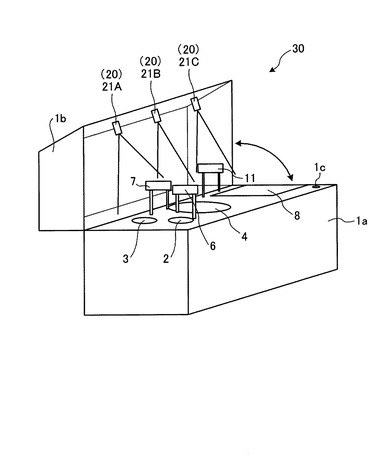
実施の形態2の自動分析装置30は、実施の形態1の侵入検知装置20を備えており、図9に示すように、カバー1bに撮像装置21A〜21Cが適宜の間隔を置いて取り付けられている。撮像装置21A〜21Cは、カバー1bを開いた際に基台1a上を撮像する。
【0063】
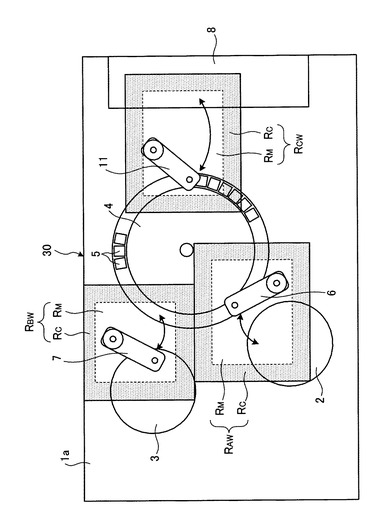
撮像装置21A〜21Cは、実施の形態1で使用した撮像装置21と同じ撮像装置であり、図10に示すように、撮像装置21Aが試薬分注機構6の警戒範囲RAWを、撮像装置21Bが試薬分注機構7の警戒範囲RBWを、撮像装置21Cが検体分注機構11の警戒範囲RCWを、それぞれ監視する。
【0064】
このため、自動分析装置30は、侵入検知装置20の差分画像形成部25が形成する差分画像に基づいて検知部27が監視領域への障害物の侵入を検知すると、制御部16による制御の下に、試薬分注機構6,7や検体分注機構11の駆動が停止される。
【0065】
従って、自動分析装置30は、侵入検知装置20を使用することによって、駆動される試薬分注機構6,7や検体分注機構11と障害物との衝突を適切に回避することができる。しかも、自動分析装置30は、侵入検知装置20に関して、個々の監視領域への障害物の侵入を1台の撮像装置で被駆動装置ごとに監視するようにすると、1台の撮像装置で総ての被駆動装置を監視する実施の形態1の場合に比べ、それぞれの撮像装置に対する負荷を小さくすることができる。
【0066】
(実施の形態3)
次に、本発明の分析装置と侵入検知装置にかかる実施の形態3について、図面を参照しつつ詳細に説明する。実施の形態1の自動分析装置は、被駆動装置が試薬分注機構6,7及び検体分注機構11であったのに対し、実施の形態3の自動分析装置は、更に攪拌棒を用いる攪拌装置を備えている。
【0067】
図11は、実施の形態3の自動分析装置の概略構成を示す斜視図である。図12は、自動分析装置の基台上における被駆動装置の作動範囲と周辺範囲を攪拌装置と共に示す模式図である。
【0068】
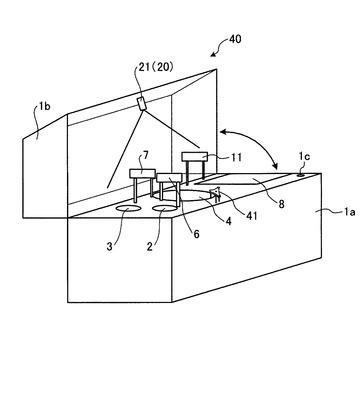
実施の形態3の自動分析装置40は、実施の形態1の侵入検知装置20を備えており、図11に示すように、実施の形態1の攪拌装置19に代えて、被駆動装置であり、攪拌棒によって反応容器5に分注された試薬と検体の混合液を攪拌する攪拌装置41を有している。攪拌装置41は、120°間隔で回転すると共に、上下動する回転板41aの下面に設けられて駆動手段によって回転され、試薬と検体の混合液を攪拌する攪拌棒を有している。
【0069】
撮像装置21は、設定部26によって試薬分注機構6,7、検体分注機構11及び攪拌装置41の周囲に作動範囲RMと、作動範囲RM及び作動範囲RM外側の所定幅を有する周辺範囲RCを包含する警戒範囲RWとを設定することにより、これらの被駆動装置毎に設定される警戒範囲RWを、それぞれ監視する。
【0070】
このため、自動分析装置40は、侵入検知装置20の差分画像形成部25が形成する差分画像に基づいて検知部27が監視領域への障害物の侵入を検知すると、制御部16による制御の下に、侵入を検知した監視領域の試薬分注機構6,7、検体分注機構11或いは攪拌装置41の駆動が停止される。
【0071】
従って、自動分析装置40は、侵入検知装置20を使用することによって、試薬分注機構6,7や検体分注機構11のみならず、攪拌装置41と障害物との衝突も適切に回避することができる。
【0072】
(実施の形態4)
次に、本発明の分析装置と侵入検知装置にかかる実施の形態4について、図面を参照しつつ詳細に説明する。実施の形態1の自動分析装置は、カバーに設けた1台の撮像装置を使用したのに対し、実施の形態4の自動分析装置は、更に基台上に設けた支持部材に撮像装置を設置し、2台の撮像装置を使用している。図13は、実施の形態4の自動分析装置の概略構成を示す斜視図である。
【0073】
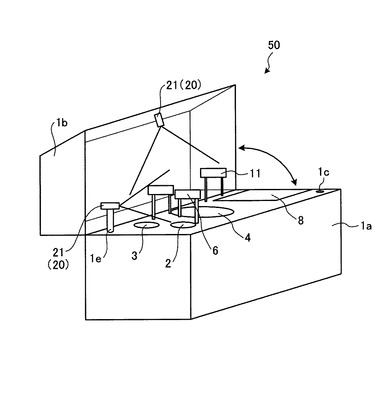
実施の形態4の自動分析装置50は、実施の形態1の侵入検知装置20を備えており、図13に示すように、カバー1bに取り付けた撮像装置21の他に、基台1a上に設けた支持部材1eに撮像装置21が設置されている。このとき、カバー1bに取り付けた撮像装置21は、基台1aを上方から俯瞰するように撮像する。これに対し、支持部材1eに設置した撮像装置21は、基台1a上に設けた試薬分注機構6,7や検体分注機構11を水平方向から撮像する。そして、支持部材1eに設置した撮像装置21が撮像した水平方向の映像をもとに実施の形態1と同様にして水平方向の監視領域を設定する。
【0074】
このように、自動分析装置50は、侵入検知装置20の差分画像形成部25が形成する差分画像に基づいて検知部27が監視領域への障害物の侵入を検知すると、制御部16による制御の下に、侵入を検知した監視領域の試薬分注機構6,7や検体分注機構11の駆動が停止される。従って、自動分析装置50は、侵入検知装置20を使用することによって、試薬分注機構6,7や検体分注機構11と障害物との衝突を適切に回避することができる。
【0075】
このとき、自動分析装置50は、基台1aを上方から俯瞰する撮像装置21の他に、基台1a上を水平方向から撮像する撮像装置21を設けた。このため、自動分析装置50は、ステレオカメラ28を使用した実施の形態1と同様に、障害物を3次元で検出することができるので、障害物の位置検出精度が向上すると共に、被駆動装置の駆動停止やアラームの発生に関してより一層きめの細かい制御が可能になる。
【0076】
(実施の形態5)
次に、本発明の分析装置と侵入検知装置にかかる実施の形態5について、図面を参照しつつ詳細に説明する。実施の形態1の自動分析装置は、キュベットホイールが1であったのに対し、実施の形態5の自動分析装置は、実施の形態1の自動分析装置を1ユニットとして複数の分析ユニットを有している。図14は、実施の形態5の自動分析装置の外観を示す斜視図である。図15は、図14の自動分析装置のカバーを外して複数の分析ユニットの上面を概略構成と共に示す平面図である。図16は、図15の1つの分析ユニットを拡大した拡大図である。
【0077】
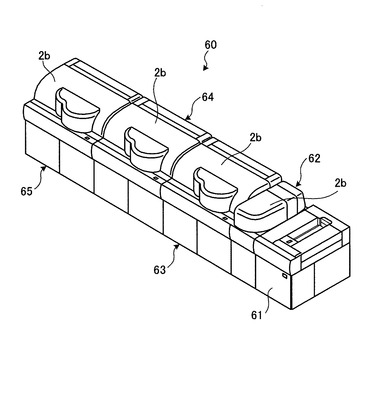
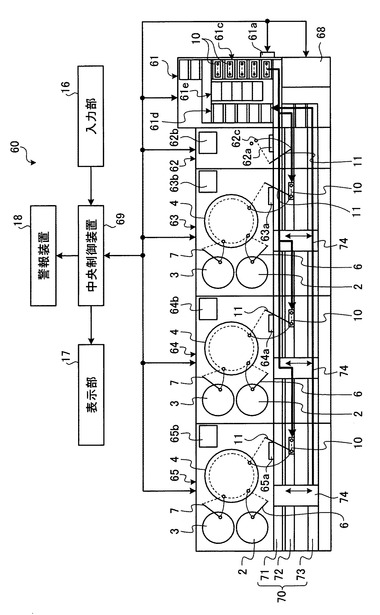
実施の形態5の自動分析装置60は、実施の形態1の侵入検知装置20の他に、図14及び図15に示すように、サンプラ61、搬送装置70に沿って並列して設けられる分析ユニット62〜65、搬送制御部68、中央制御装置69及び搬送装置70を備えている。ここで、自動分析装置60は、分析ユニット63〜65として実施の形態1の自動分析装置1を使用しており、撮像装置21を取り付けたカバー1b(図14参照)は、図15において、中央制御装置69側を中心として搬送装置70側を上方へ跳ね上げるようにして開かれる。
【0078】
サンプラ61は、分析ユニット62〜65と共に並列して設けられており、ラック供給部61c、ラック回収部61d及びラック収納部61eを有している。ラック供給部61cは、検体容器10aを保持した複数のラック10がセットされる部分であり、ラック回収部61dと共に中央制御装置69からの制御の下に作動し、これらのラック10を順次搬送装置70の追い越しライン71又は搬送ライン72に送り出す。ラック回収部61dは、戻しライン73によって搬送されてくるラック10を回収してラック収納部61eに搬送する。これにより、分析終了後の検体容器10aを保持したラック10は、ラック収納部61eに収納される。また、サンプラ61は、複数のラック10の搬送装置70への送り出し位置にバーコードリーダ61aが設けられている。バーコードリーダ61aは、サンプラ61から搬送装置70へ送り出されるラック10に貼付されたバーコードラベルから情報を読み取り、読み取ったラック情報を中央制御装置69へ出力する。バーコードラベルには、ラック10の種類,ラック番号及び各検体容器10aに保持された検体の分析項目等を含む情報を記録したバーコードが付されている。
【0079】
分析ユニット62〜65は、搬送装置70に沿って並列して設けられ、中央制御装置69の制御の下に作動する。
【0080】
分析ユニット62は、電極法によって検体中のナトリウム,塩素,カリウム,カルシウム,無機リン等のイオンからなる電解質を測定するユニットであり、測定容器62cに検体を分注する検体分注機構11、バーコードリーダ62a及びユニット制御部62bを有しており、自動分析装置1と同様に、基台上を開閉自在に覆うカバー1b(図14参照)が取り付けられている。
【0081】
バーコードリーダ62aは、搬送装置70を臨む位置に追い越しライン71に隣接して設けられ、追い越しライン71や搬送ライン72によって分析ユニット62へ搬送されてきたラック10に貼付されたバーコードラベルから情報を読み取る。バーコードリーダ62aは、読み取ったバーコードに記録された情報を中央制御装置69へ出力する。ユニット制御部62bは、CPU,RAM及びROM等により構成され、中央制御装置69からの指示を受けて検体分注機構11を含む分析ユニット62全体の動作を制御する。ユニット制御部62bは、分析ユニット62における測定項目,測定結果等を含む測定データを中央制御装置69へ出力する。
【0082】
分析ユニット63〜65は、分析ユニット63が生化学項目を、分析ユニット64が免疫項目を、分析ユニット65が遺伝子項目を、それぞれ分析するが、主要構成が同じであるので、分析ユニット63について説明する。
【0083】
分析ユニット63は、実施の形態1の自動分析装置1にバーコードリーダ63a及びユニット制御部63bが設けられている。
【0084】
バーコードリーダ63aは、追い越しライン71や搬送ライン72によって分析ユニット63へ搬送されてきたラック10のバーコードラベルから情報を読み取る。バーコードリーダ63aは、読み取ったバーコードに記録された情報を中央制御装置69へ出力する。ユニット制御部63bは、CPU,RAM及びROM等により構成され、中央制御装置69からの指示を受けて分析ユニット63全体の動作を制御する。ユニット制御部63bは、分析ユニット63における測定項目,測定結果等を含む測定データを中央制御装置69へ出力する。
【0085】
搬送制御部68は、中央制御装置69からの指示を受けてラック供給部61cから送り出されるラック10を追い越しライン71や搬送ライン72に振り分け、分析ユニット65における分析処理が終了したラックを戻しライン73に戻すと共に、戻しライン73を搬送されてくるラック10をラック回収部61dへ回収する等の動作を制御する。
【0086】
中央制御装置69は、自動分析装置60全体を制御するパーソナルコンピュータであり、ディスプレイパネル等の表示部、表示部に表示される情報をプリントアウトするプリンタ自動分析装置60へ分析操作に関連した分析項目等を含む種々の情報を入力する操作を行うキーボードやマウス等の入力部を有している。中央制御装置69は、バーコードリーダ61aから送られてくる情報(検体の分析項目)に基づいてラック10を搬送すべき分析ユニットを決定し、決定した搬送先の分析ユニットを搬送装置70に指示する。また、中央制御装置69は、バーコードリーダ62a〜65aが読み取ったバーコードラベルの情報に基づいてラック10が指示された正規の分析ユニットに搬送されているか否かを確認する。
【0087】
搬送装置70は、中央制御装置69からの指示を受けて駆動され、ベルトコンベアによってラック10を搬送する。搬送装置70は、分析ユニット62〜65の配列方向に沿って互いに並行して配置され、緊急検体や割り込み検体用のラック10を特定の分析ユニットに選択的に搬送する追い越しライン71と、ラック10を分析ユニット62〜65に順次搬送する搬送ライン72と、各分析ユニットに搬送後のラック10をラック回収部61dへ戻す戻しライン73と、ラック10を搬送するラインを変更するラインチェンジャ74を有している。
【0088】
以上のように構成される自動分析装置60は、サンプラ61のラック供給部61cに反応容器5を保持した複数のラック10をセットし、スイッチをオンすると、中央制御装置69の制御の下に、ラック10がラック供給部61cから順次送り出され、搬送装置70によってラック10が分析ユニット62〜65へ搬送される。搬送されたラック10は、搬送先の分析ユニット62〜65に配置されたバーコードリーダ62a〜65aが読み取ったバーコードラベルの情報に基づいてラック10が指示された正規の分析ユニットに搬送されているか否かが確認され、正規の場合にはその分析ユニットで分析が開始される。搬送先が誤っている場合、中央制御装置69の制御の下に、ラック10は、搬送装置70によって正規の分析ユニットへ転送される。そして、自動分析装置60は、搬送先の分析ユニットで反応容器5内の検体が分析された後、搬送装置70によってラック10がサンプラ61へ戻され、ラック回収部61dで回収される。
【0089】
このとき、自動分析装置60は、分析ユニット62〜65において、搬送装置70によって搬送されるラック10から検体分注機構11が検体を分注する。このため、検体分注機構11の作動範囲RMは、搬送装置70上まで及んでいる。従って、自動分析装置60の各分析ユニットにおいては、カバー2bに取り付ける撮像装置21は、基台上及び搬送装置70上を撮像する画角を有するものを使用する。
【0090】
一方、設定部26は、分析ユニット62〜65、例えば、分析ユニット63において、検体分注機構11の作動範囲RMと、作動範囲RM及び作動範囲RM外側の所定幅を有する周辺範囲RCを包含した警戒範囲RWを設定する際、図16に示すように、搬送装置70を含むように設定する。また、設定部26は、試薬分注機構6,7の作動範囲RM及び警戒範囲RWを、図16に示すように設定する。試薬分注装置7は、奥部側にカバー1bがあるので、奥部側に警戒範囲RWを設定する必要がないからである。
【0091】
このようにして作動範囲RM及び警戒範囲RWを設定することにより、差分画像形成部25が差分画像を形成し、差分画像を形成した領域が障害物の侵入を監視する監視領域AMとなる。このため、自動分析装置60においては、分析ユニット63〜65は、カバー1bを開いた場合、実施の形態1の自動分析装置1と同様に、各分析ユニットにおいて、侵入検知装置20の差分画像形成部25が形成する差分画像に基づいて検知部27が監視領域への障害物の侵入を検知する。
【0092】
この場合、検知部27が監視領域への障害物の侵入を検知すると、自動分析装置60は、中央制御装置69による制御の下に、試薬分注機構6,7や検体分注機構11の被駆動装置の駆動が停止される。従って、自動分析装置60は、侵入検知装置20を使用することによって、駆動される試薬分注機構6,7や検体分注機構11と障害物との衝突を適切に回避することができる。
【0093】
尚、本発明の自動分析装置は、実施の形態1〜5の自動分析装置に限定されるものではなく、本発明の目的の範囲内で実施の形態1〜5において説明した自動分析装置の構成を適宜組み合わせて使用してもよい。
【0094】
また、上記実施の形態は、監視領域AMに侵入する障害物としてオペレータの手を例に説明したが、分注装置等の被駆動装置が複数ある分析装置において、これら被駆動装置相互間の軌跡が重なる場合の制御エラーに起因した被駆動装置同士の衝突を侵入検知装置によって事前に検知することもできる。
【図面の簡単な説明】
【0095】
【図1】実施の形態1の自動分析装置の概略構成を示す斜視図である。
【図2】図1に示す自動分析装置の基台の平面図を、制御部等を含むブロック図と共に示す図である。
【図3】自動分析装置で使用する実施の形態1の侵入検知装置を制御部等と共に示すブロック図である。
【図4】自動分析装置の基台上における被駆動装置の作動範囲と周辺範囲を示す模式図である。
【図5】侵入検知装置の監視領域の形状と監視領域と障害物との位置関係を模式的に説明する斜視図である。
【図6】撮像装置の変形例を示す斜視図である。
【図7】撮像装置を基台上に設けた支持部材に設置した自動分析装置の変形例を示す斜視図である。
【図8】被駆動装置の周辺範囲に関する変形例を示す図4に対応する模式図である。
【図9】実施の形態2の自動分析装置の概略構成を示す斜視図である。
【図10】自動分析装置の基台上における被駆動装置の作動範囲と周辺範囲と、各撮像装置が監視する警戒範囲とを示す模式図である。
【図11】実施の形態3の自動分析装置の概略構成を示す斜視図である。
【図12】自動分析装置の基台上における被駆動装置の作動範囲と周辺範囲を攪拌装置と共に示す模式図である。
【図13】実施の形態4の自動分析装置の概略構成を示す斜視図である。
【図14】実施の形態5の自動分析装置の外観を示す斜視図である。
【図15】図14の自動分析装置のカバーを外して複数の分析ユニットの上面を概略構成と共に示す平面図である。
【図16】図15の1つの分析ユニットを拡大した拡大図である。
【符号の説明】
【0096】
1 自動分析装置
1a 基台
2,3 試薬テーブル
4 キュベットホイール
5 反応容器
6,7 試薬分注機構
8 搬送機構
9 フィーダ
10 ラック
11 検体分注機構
12 分析光学系
13 洗浄機構
15 制御部
16 入力部
17 表示部
18 警報装置
19 攪拌装置
20 侵入検知装置
21 撮像装置
21A〜21C 撮像装置
22 撮像制御部
23 画像格納部
24 静止画格納部
25 差分画像形成部
26 設定部
27 検知部
28 ステレオカメラ
30 自動分析装置
40 自動分析装置
41 攪拌装置
50 自動分析装置
60 自動分析装置
61 サンプラ
62〜65 分析ユニット
68 搬送制御部
69 中央制御装置
70 搬送装置
71 追い越しライン
72 搬送ライン
73 戻しライン
74 ラインチェンジャ
AM 監視領域
【技術分野】
【0001】
本発明は、分析装置と侵入検知装置に関するものである。
【背景技術】
【0002】
従来、分析装置は、分析動作に伴って検体又は試薬を分注する分注アームや液体を攪拌する攪拌棒、反応容器や分注用チップを移送させるロボットアームのような移送機構(特許文献1参照)等の被駆動装置が駆動されている。このため、従来の分析装置は、障害物が被駆動装置の駆動範囲に侵入して衝突した場合の液体の流出等を含む不具合を回避すべく侵入した障害物と被駆動装置との衝突を検知して被駆動部際、即ち、アームの動作を停止させている(例えば、特許文献2,請求項4参照)。
【0003】
【特許文献1】特開2003−83992号公報
【特許文献2】特開2000−221201号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献2に開示された従来の分析装置は、衝突を前提として障害物の侵入に対する対策としている。一方、分注アームで使用する分注ノズルや液体を攪拌する攪拌棒等の被駆動装置は、キュベットの大きさに対応して非常に小さいことから、障害物と衝突すると分注ノズル等が簡単に曲がってしまう。このため、従来の分析装置は、そのまま動作を続行すると分注ノズル等が折損し、分注量が不正確になる等の問題があり、障害物との衝突を回避することが求められていた。
【0005】
本発明は、上記に鑑みてなされたものであって、被駆動装置と障害物との衝突を回避することが可能な分析装置と侵入検知装置とを提供することを目的とする。
【課題を解決するための手段】
【0006】
上述した課題を解決し、目的を達成するために、請求項1に係る分析装置は、基台上に設置された被駆動装置と、少なくとも被駆動装置を開閉自在に覆うカバーとを有する分析装置において、前記基台上を撮像する撮像装置と、前記カバーの開放時に前記撮像装置が撮像した前記基台上の画像を静止画として記録する静止画記録手段と、前記カバーの開放後、前記撮像装置が撮像した前記基台上の画像と前記静止画との差分画像を形成する差分画像形成手段と、前記被駆動装置の周囲に前記差分画像を形成する監視領域を設定する設定手段と、前記差分画像に基づいて前記監視領域への障害物の侵入を検知する検知手段と、前記検知手段が前記監視領域への障害物の侵入を検知した際に、前記被駆動装置の駆動を停止させ、又は警報装置を作動させる制御手段と、を備えたことを特徴とする。
【0007】
また、請求項2に係る分析装置は、上記の発明において、前記監視領域は、前記基台上の前記被駆動装置の駆動範囲を含む作動範囲外側の所定幅を有する周辺範囲と、前記撮像装置の画角とによって囲まれる領域であることを特徴とする。
【0008】
また、請求項3に係る分析装置は、上記の発明において、前記監視領域は、前記基台上の前記被駆動装置の駆動範囲を含む作動範囲外側と、前記撮像装置の画角とによって囲まれる領域であることを特徴とする。
【0009】
また、請求項4に係る分析装置は、上記の発明において、前記検知手段は、前記監視領域が複数存在する場合には、それぞれの監視領域毎に前記障害物の侵入を検知することを特徴とする。
【0010】
また、請求項5に係る分析装置は、上記の発明において、前記制御手段は、前記障害物が侵入した前記監視領域の被駆動装置のみ、或いは前記複数の監視領域の被駆動装置総ての駆動を停止させることを特徴とする。
【0011】
また、請求項6に係る分析装置は、上記の発明において、前記撮像装置は、前記基台全体を一括して撮像する単一の撮像装置であることを特徴とする。
【0012】
また、請求項7に係る分析装置は、上記の発明において、前記撮像装置は、前記複数の監視領域を個別に撮像する複数の撮像装置であることを特徴とする。
【0013】
また、請求項8に係る分析装置は、上記の発明において、前記撮像装置は、前記カバーの前記基台を臨む位置に設けられていることを特徴とする。
【0014】
また、請求項9に係る分析装置は、上記の発明において、前記撮像装置は、略並行な光軸を有する一対の立体撮像光学系を備えることを特徴とする。
【0015】
また、請求項10に係る分析装置は、上記の発明において、前記撮像装置は、前記基台上に設けた支持部材に設置されていることを特徴とする。
【0016】
また、請求項11に係る分析装置は、上記の発明において、前記撮像装置は、複数台設けられていることを特徴とする。
【0017】
また、請求項12に係る分析装置は、上記の発明において、前記撮像装置は、2台設けられ、一方の撮像装置は、前記カバーの前記基台を臨む位置に設けられ、他方の撮像装置は、前記基台上の前記被駆動装置を水平方向側方から撮像する位置に設けられていることを特徴とする。
【0018】
また、請求項13に係る分析装置は、上記の発明において、前記被駆動装置は、検体又は試薬を分注する分注機構或いは液体を攪拌する攪拌装置であることを特徴とする。
【0019】
また、上述した課題を解決し、目的を達成するために、請求項14に係る分析装置は、基台上に設置され、検体又は試薬を分注する分注機構と、少なくとも前記分注機構を開閉自在に覆うカバーとを有する分析装置において、前記基台上を撮像する撮像装置と、前記カバーの開放時に前記撮像装置が撮像した前記基台上の画像を静止画として記録する静止画記録手段と、前記撮像装置から出力される画像出力と前記静止画記録手段から出力される静止画出力とをもとに前記撮像装置が撮像した画像に基づいて前記分注機構の周囲に設定される監視領域への障害物の侵入を検知する検知手段と、前記検知手段が前記監視領域への障害物の侵入を検知した際に、前記分注機構の駆動を停止させ、又は警報装置を作動させる制御手段と、を備えたことを特徴とする。
【0020】
また、請求項15に係る分析装置は、上記の発明において、さらに、分注された前記検体と試薬とを攪拌する攪拌手段が設けられていることを特徴とする。
【0021】
また、上述した課題を解決し、目的を達成するために、請求項16に係る分析装置は、基台上に設置され、検体又は試薬を分注する分注機構と、少なくとも前記分注機構を開閉自在に覆うカバーとを有する分析ユニットがラックを搬送する搬送装置に沿って複数並列して設けられた分析装置において、前記基台上及び搬送装置上を撮像する撮像装置と、前記カバーの開放時に前記撮像装置が撮像した前記基台上及び搬送装置上の画像を静止画として記録する静止画記録手段と、前記撮像装置から出力される画像出力と前記静止画記録手段から出力される静止画出力とをもとに前記撮像装置が撮像した画像に基づいて前記分注機構の周囲に設定される監視領域への障害物の侵入を検知する検知手段と、前記検知手段が前記監視領域への障害物の侵入を検知した際に、前記分注機構の駆動を停止させ、又は警報装置を作動させる制御手段と、を備えたことを特徴とする。
【0022】
また、上述した課題を解決し、目的を達成するために、請求項17に係る侵入検知装置は、物体を移送する移送機構が駆動される第一の範囲及び当該第一の範囲の外側の第二の範囲を撮像する撮像装置と、前記撮像装置が撮像した前記第一及び第二の範囲の画像を静止画として記録する静止画記録手段と、前記撮像装置から出力される画像出力と前記静止画記録手段から出力される静止画出力とをもとに前記撮像装置が撮像した画像に基づいて前記移送機構の周囲に設定される監視領域への障害物の侵入を検知する検知手段と、を備えたことを特徴とする。
【発明の効果】
【0023】
本発明の侵入検知装置は、監視領域への障害物の侵入を検知する検知手段を備え、本発明の分析装置は、検知手段が監視領域への障害物の侵入を検知した際に、被駆動装置の駆動を停止させ、又は警報装置を作動させる制御手段を備えているので、被駆動装置と障害物との衝突を回避することが可能な分析装置と侵入検知装置とを提供することができる。
【発明を実施するための最良の形態】
【0024】
(実施の形態1)
以下、本発明の分析装置と侵入検知装置にかかる実施の形態1について、図面を参照しつつ詳細に説明する。図1は、実施の形態1の自動分析装置の概略構成を示す斜視図である。図2は、図1に示す自動分析装置の基台の平面図を、制御部等を含むブロック図と共に示す図である。図3は、自動分析装置で使用する実施の形態1の侵入検知装置を制御部等と共に示すブロック図である。図4は、自動分析装置の基台上における被駆動装置の作動範囲と周辺範囲を示す模式図である。図5は、侵入検知装置の監視領域の形状と監視領域と障害物との位置関係を模式的に説明する斜視図である。
【0025】
自動分析装置1は、図1及び図2に示すように、基台1a上に試薬テーブル2,3、キュベットホイール4、搬送機構8、分析光学系12、洗浄機構13、制御部15及び攪拌装置19が配置され、障害物の侵入検知装置20を備えている。基台1aは、試薬分注機構6,7及び検体分注機構11を含めて基台1a上を開閉自在に覆うカバー1bが取り付けられ、搬送機構8の近傍にはカバー1bの開閉を検出する近接スイッチ1cが設けられている。一方、カバー1bは、図1に示すように、開いた際に基台1a上を撮像する撮像装置21が取り付けられている。
【0026】
撮像装置21は、基台1a上を撮像する撮像装置であり、撮像した画像を既存の画像処理ソフトによって処理して所望範囲を切り出すことができれば、例えば、光学カメラやTVカメラ、CCDカメラやデジタルビデオカメラ等の電子カメラを使用することができる。
【0027】
試薬テーブル2,3は、図2に示すように、それぞれ周方向に配置される複数の試薬容器2a,3aを保持し、駆動手段に回転されて試薬容器2a,3aを周方向に搬送する。このとき、試薬テーブル2には、第一試薬を保持した試薬容器2aが配置され、試薬テーブル3には、第二試薬を保持した試薬容器3aが配置されている。
【0028】
キュベットホイール4は、図2に示すように、周方向に沿って反応容器5を配置する複数のホルダが周方向に形成され、駆動手段によって矢印で示す方向に回転されて反応容器5を搬送する。キュベットホイール4は、各ホルダの下部に対応する位置に半径方向に対向する測光孔が形成されている。反応容器5は、近傍に設けた試薬分注機構6,7によって試薬テーブル2,3の試薬容器2a,3aから試薬が分注される。
【0029】
反応容器5は、分析光学系12から出射された分析光(340〜800nm)に含まれる光を透過する素材、例えば、耐熱ガラスを含むガラス,環状オレフィンやポリスチレン等の合成樹脂から成形された四角筒状の容器である。
【0030】
試薬分注機構6,7は、それぞれ水平面内を矢印方向に回動するアーム6a,7aに試薬を分注するプローブ6b,7bが設けられ、洗浄水によってプローブ6b,7bを洗浄する洗浄手段を有している。試薬分注機構6,7は、駆動モータ6c,7c(図3参照)によってアーム6a,7aが回動される。
【0031】
搬送機構8は、図2に示すように、フィーダ9に配列した複数のラック10を矢印方向に沿って1つずつ搬送する搬送手段であり、ラック10を歩進させながら移送する。ラック10は、検体を収容した複数の検体容器10aを保持している。ここで、検体容器10aは、搬送機構8によって移送されるラック10の歩進が停止するごとに、水平方向に回動するアーム11aとプローブ11bとを有する検体分注機構11によって検体が各反応容器5へ分注される。このため、検体分注機構11は、洗浄水によってプローブ11bを洗浄する洗浄手段を有している。また、検体分注機構11は、駆動モータ11c(図3参照)によってアーム11aが回動される。
【0032】
分析光学系12は、試薬と検体とが反応した反応容器5内の液体試料を分析するための分析光(340〜800nm)を出射するもので、図2に示すように、発光部12a,分光部12b及び受光部12cを有している。発光部12aから出射された分析光は、反応容器5内の液体試料を透過し、分光部12bと対向する位置に設けた受光部12cによって受光される。受光部12cは、制御部15と接続されている。
【0033】
洗浄機構13は、ノズル13aによって反応容器5内の反応液を吸引して廃棄した後、ノズル13aから洗剤や洗浄水等の洗浄液等を繰り返し注入し、吸引することにより、分析光学系12による測光が終了した反応容器5を洗浄する。
【0034】
制御部15は、自動分析装置1の各部と電気的に接続されてこれら各部の作動を制御すると共に、発光部12aの出射光量と受光部12cが受光した光量に基づく反応容器5内の液体試料の吸光度に基づいて検体の成分濃度を算出するもので、例えば、マイクロコンピュータ等が使用される。また、制御部15は、検知部27が監視領域へ障害物が侵入したことを検知した際に、試薬分注機構6,7や検体分注機構11を含む被駆動装置の駆動を停止させ、又は警報装置18を作動させる。制御部15は、図2に示すように、入力部16、表示部17及び警報装置18と接続されている。
【0035】
入力部16は、制御部15へ検査項目や試薬,検体の分注指示等を含む検査情報の入力操作をする部分であり、例えば、キーボードやマウス等が使用される。入力部16から入力された検査項目や試薬,検体の分注指示等を含む検査情報は制御部15に記憶される。表示部17は、分析内容や警報等を表示するもので、ディスプレイパネル等が使用される。ここで、分析装置1は、表示部17が警報を表示する際、アラームを発する警報装置18(図3参照)を備えている。
【0036】
攪拌装置19は、音波(表面弾性波)によって反応容器5に分注された試薬と検体の混合液を非接触で攪拌させる攪拌装置である。
【0037】
侵入検知装置20は、カバー1bを開いた際に起動され、試薬分注機構6,7や検体分注機構11等の被駆動装置の周囲に形成される監視領域への障害物の侵入を検知するもので、図3に示すように、上述の撮像装置21の他、撮像制御部22、画像格納部23、静止画格納部24、差分画像形成部25、設定部26及び検知部27を有している。
【0038】
撮像制御部22は、撮像装置21が撮像した基台1a上の画像データを電子データへ置換する。このとき、撮像制御部22は、撮像装置21が撮像した基台1a上の画像の電子データを画像格納部23と静止画格納部24へ出力する。
【0039】
画像格納部23は、撮像装置21が撮像した基台1a上の動画の電子データを記録する。静止画格納部24は、カバー1bの開放時に撮像装置21が撮像した基台1a上の電子データを静止画として格納する。
【0040】
差分画像形成部25は、静止画格納部24に格納された静止画の電子データと、画像格納部23に記録される撮像装置21が撮像した基台1a上の動画の電子データとをもとに、画像の中から監視領域を切り出すと共に、差分画像を形成する画像処理を行い、監視領域に関して画像データの1フレーム毎に差分画像を形成する。
【0041】
設定部26は、試薬分注機構6,7や検体分注機構11の周囲に各被駆動装置毎に監視領域を設定する設定手段である。設定部26は、監視領域を設定するため、基台1a上の画像に関して被駆動装置の駆動範囲を含む作動範囲外側の所定幅を有する周辺範囲を設定する。即ち、撮像装置21が撮像した基台1a上の画像を示す図4において、被駆動装置である試薬分注機構6,試薬分注機構7及び検体分注機構11のそれぞれについて駆動範囲(矢印参照)を含む作動範囲RMと、作動範囲RM及び作動範囲RM外側の所定幅を有する周辺範囲RCを包含する警戒範囲RWとを個々に設定する。このとき、設定部26による作動範囲RMや警戒範囲RWの設定は、表示部17に表示された基台1a上の画像を見ながらオペレータがマウス等を利用して入力部16から設定する。
【0042】
この後、カバー1bの開の間、差分画像形成部25は、画像格納部23に記録される画像データ、即ち、撮像装置21による基台1a上の動画像データの1フレーム毎に、動画像データの周辺範囲RCの画像と、静止画格納部24に格納された静止画における周辺範囲RCの画像との差に基づく画像を作成する。
【0043】
従って、差分画像形成部25が形成する周辺範囲RCに関する差分画像は、例えば、検体分注機構11に関しては、図5に示すように、基台1a上の周辺範囲RCと周辺範囲RCを見込む撮像装置21の画角とによって囲まれる四角錐形状の筒からなる領域(=監視領域AM)となる。この四角錐形状の筒からなる監視領域AMの形状は、他の試薬分注機構6や試薬分注機構7も同様である。このように、設定部26によって周辺範囲RCや警戒範囲RWを設定することにより、差分画像形成部25が差分画像を形成し、差分画像を形成した領域が障害物の侵入を監視する監視領域AMとなる。
【0044】
検知部27は、差分画像形成部25が形成した差分画像をもとに監視領域AMへ障害物が侵入したか否かを検知する。このとき、検知部27は、差分画像中の予め設定した所定の大きさ以上の物体を障害物として侵入の有無を検知する。なお、監視領域AMには、試薬テーブル2,3における試薬容器2a,3aの搬送路及びキュベットホイール4における反応容器5の搬送路がかかっているが、通常、蓋が閉っているため、差分画像として形成されることはない。
【0045】
以上のように構成される自動分析装置1は、回転するキュベットホイール4によって周方向に沿って搬送されてくる複数の反応容器5に試薬分注機構6が試薬容器2aから第一試薬を順次分注する。第一試薬が分注された反応容器5は、検体分注機構11によってラック10に保持された複数の検体容器10aから検体が順次分注される。そして、キュベットホイール4が停止する都度、反応容器5に分注された第一試薬と検体が攪拌装置19によって順次攪拌されて反応する。攪拌後、キュベットホイール4が回転され、反応容器5の反応液に試薬分注機構7によって試薬容器3aから第二試薬が順次分注され、再度、攪拌装置19によって攪拌される。
【0046】
自動分析装置1においては、通常、試薬の量に比べて検体の量が少なく、攪拌によって液体中に生ずる一連の流れによって反応容器5に分注された少量の検体が多量の試薬に引き込まれて検体と試薬との反応が促進される。このようにして検体と試薬が反応した反応液を保持した反応容器5は、キュベットホイール4が再び回転したときに分析光学系12を通過し、発光部12aから出射された光束が透過する。このとき、反応容器5が保持した反応液は、受光部12cで側光され、制御部15によって成分濃度等が分析される。そして、分析が終了した反応容器5は、洗浄機構13によって洗浄された後、再度検体の分析に使用される。
【0047】
このとき、自動分析装置1は、試薬切れ等によって試薬容器を交換する必要が生ずる。このような場合、自動分析装置1は、カバー1bを開いて試薬容器を交換し、試薬交換に伴うキャリブレーション等のメンテナンス操作を行う。このため、自動分析装置1は、メンテナンス操作に伴ってオペレータが試薬分注機構6,7や検体分注機構11の被駆動装置を作動させながら基台1a上でメンテナンス作業を行う。従って、メンテナンス作業の際にオペレータの手等が被駆動装置の作動範囲RMに侵入することがある。
【0048】
本発明の侵入検知装置20は、このような場合を想定して被駆動装置と障害物との衝突を回避することを可能にするものである。即ち、侵入検知装置20は、図5に示すように、オペレータの手HSが検体分注機構11に接近しても監視領域AMの外部にある場合には、検知部27は障害物の侵入を検知しない。これに対し、オペレータの手HDが検体分注機構11に接近し、監視領域AM内に侵入した場合、差分画像には侵入した手HDに対応する大きさの画像が表示される。このため、検知部27は、差分画像をもとに障害物(=手HD)が侵入したと検知し、制御部16に検知信号を出力する。
【0049】
これにより、制御部16は、停止信号を検体分注機構11に出力して駆動モータ11cの駆動を停止し、表示部17にその旨の警報を表示すると共に、警報装置18からアラームを発する。このため、自動分析装置1は、オペレータの手HDが検体分注機構11のアーム11aに衝突したり、手HDがプローブ11bと衝突して曲げたりする事故を回避することができる。このとき、制御部16は、検体分注機構11の他、試薬分注機構6,7も停止させてもよい。
【0050】
上述のように、自動分析装置1は、侵入検知装置20の差分画像形成部25が形成する差分画像に基づいて検知部27が監視領域への障害物の侵入を検知すると、制御部16による制御の下に、試薬分注機構6,7や検体分注機構11等の被駆動装置の駆動が停止される。このため、自動分析装置1は、侵入検知装置20を使用することによって、駆動される試薬分注機構6,7や検体分注機構11等と障害物との衝突を適切に回避することができる。
【0051】
特に、本発明の侵入検知装置20は、撮像装置21によって基台1a上を一括して撮像した画像を処理することにより監視領域へ侵入する障害物を検知している。このため、侵入検知装置20は、複数の光センサによって被駆動装置の周囲に監視領域を形成する場合に比べると、少なくとも撮像装置21が1台あれば良いので、非常に簡単な構造とすることができる。
【0052】
ここで、侵入検知装置20は、撮像装置21として、図6に示すステレオカメラ28を使用してもよい。ステレオカメラ28は、本体28aに撮像倍率が同じ撮像レンズ系28b,28cが設けられている。侵入検知装置20は、ステレオカメラ28を使用すると、障害物を3次元で検出することができるので、障害物の位置検出精度が向上する。
【0053】
特に、図5において、例えば、オペレータの手HSが監視領域AM内に侵入したとしても、この高さを保持して侵入するのであれば、アーム11aやプローブ11bと衝突することがなく、何ら危険はない。即ち、オペレータの手HSが、監視領域AM内の回動するアーム11aの上方へ侵入する場合には、検体分注機構11の駆動を停止する必要はない。このため、侵入検知装置20は、ステレオカメラ28を使用すると、被駆動装置の駆動停止やアラームの発生に関してより一層きめの細かい制御が可能になる。
【0054】
また、撮像装置21は、カバー1bに取り付ける他に、図7に示すように、基台1a上に設けた支持部材1dに設置してもよい。このようにすると、自動分析装置1は、撮像装置21を設けるうえで、設計上の自由度が増す。
【0055】
更に、基台1a上に撮像装置21を設置し、撮像装置21により横(水平)方向からの撮影画像を用い、上記と同様に、被駆動装置の作動範囲RMと周辺範囲RCとを設定する。そして、作動範囲RMにおける画像格納部23と静止画格納部24の画像データに基づく差分画像形成部25による差分画像に基づいて検知部27によって監視領域AMへの障害物の侵入を監視するようにしてもよい。
【0056】
また、撮像装置21は、撮影光軸をカバー1b側に向けて基台1a上に設置し、カバー1bに反射鏡を設けることにより、前記反射鏡を介して被駆動装置を撮影するようにしてもよい。この場合、上方から撮影した像によって監視領域AMへの障害物の侵入を監視しながら、自動分析装置1を小型化し、且つ、カバー1bの開閉による撮像装置21の故障等を防ぐことができる。
【0057】
更に、侵入検知装置20は、設定部26によって画像格納部23及び静止画格納部24に格納される画像自体を監視領域AMの範囲内に設定してもよい。
【0058】
また、監視領域AMの形状を決める周辺範囲RCは、撮像装置21の画角が十分大きければ、図8に示すように、基台1a上の試薬分注機構6,7及び検体分注機構11の作動範囲RMの外側全体としてもよい。このようにすると、図5に示す監視領域AMが、試薬分注機構6,7及び検体分注機構11の作動範囲RMの外側全体とこの範囲全体を見込む撮像装置21の画角とによって囲まれる領域に広がり、オペレータは、試薬分注機構6,7及び検体分注機構11との衝突を回避して安心してメンテナンス作業を行うことができる。
【0059】
一方、実施の形態1の自動分析装置1は、被駆動装置として試薬分注機構6,7や検体分注機構11を使用した。但し、被駆動装置は、これらに限定されるものではなく、例えば、試薬容器2a,3a,反応容器5、検体容器10a或いは図示しない分注チップ等を搬送する搬送手段であってもよい。
【0060】
(実施の形態2)
次に、本発明の分析装置と侵入検知装置にかかる実施の形態2について、図面を参照しつつ詳細に説明する。実施の形態1の自動分析装置は、1台の撮像装置を使用したのに対し、実施の形態2の自動分析装置は、撮像装置を複数設け、個々の監視領域への障害物の侵入を1台の撮像装置で被駆動装置ごとに監視している。
【0061】
図9は、実施の形態2の自動分析装置の概略構成を示す斜視図である。図10は、自動分析装置の基台上における被駆動装置の作動範囲と周辺範囲と、各撮像装置が監視する警戒範囲とを示す模式図である。ここで、以下に説明する各実施の形態においては、実施の形態1の自動分析装置1及び侵入検知装置20と同一の構成部材には同一の符号を付して説明している。
【0062】
実施の形態2の自動分析装置30は、実施の形態1の侵入検知装置20を備えており、図9に示すように、カバー1bに撮像装置21A〜21Cが適宜の間隔を置いて取り付けられている。撮像装置21A〜21Cは、カバー1bを開いた際に基台1a上を撮像する。
【0063】
撮像装置21A〜21Cは、実施の形態1で使用した撮像装置21と同じ撮像装置であり、図10に示すように、撮像装置21Aが試薬分注機構6の警戒範囲RAWを、撮像装置21Bが試薬分注機構7の警戒範囲RBWを、撮像装置21Cが検体分注機構11の警戒範囲RCWを、それぞれ監視する。
【0064】
このため、自動分析装置30は、侵入検知装置20の差分画像形成部25が形成する差分画像に基づいて検知部27が監視領域への障害物の侵入を検知すると、制御部16による制御の下に、試薬分注機構6,7や検体分注機構11の駆動が停止される。
【0065】
従って、自動分析装置30は、侵入検知装置20を使用することによって、駆動される試薬分注機構6,7や検体分注機構11と障害物との衝突を適切に回避することができる。しかも、自動分析装置30は、侵入検知装置20に関して、個々の監視領域への障害物の侵入を1台の撮像装置で被駆動装置ごとに監視するようにすると、1台の撮像装置で総ての被駆動装置を監視する実施の形態1の場合に比べ、それぞれの撮像装置に対する負荷を小さくすることができる。
【0066】
(実施の形態3)
次に、本発明の分析装置と侵入検知装置にかかる実施の形態3について、図面を参照しつつ詳細に説明する。実施の形態1の自動分析装置は、被駆動装置が試薬分注機構6,7及び検体分注機構11であったのに対し、実施の形態3の自動分析装置は、更に攪拌棒を用いる攪拌装置を備えている。
【0067】
図11は、実施の形態3の自動分析装置の概略構成を示す斜視図である。図12は、自動分析装置の基台上における被駆動装置の作動範囲と周辺範囲を攪拌装置と共に示す模式図である。
【0068】
実施の形態3の自動分析装置40は、実施の形態1の侵入検知装置20を備えており、図11に示すように、実施の形態1の攪拌装置19に代えて、被駆動装置であり、攪拌棒によって反応容器5に分注された試薬と検体の混合液を攪拌する攪拌装置41を有している。攪拌装置41は、120°間隔で回転すると共に、上下動する回転板41aの下面に設けられて駆動手段によって回転され、試薬と検体の混合液を攪拌する攪拌棒を有している。
【0069】
撮像装置21は、設定部26によって試薬分注機構6,7、検体分注機構11及び攪拌装置41の周囲に作動範囲RMと、作動範囲RM及び作動範囲RM外側の所定幅を有する周辺範囲RCを包含する警戒範囲RWとを設定することにより、これらの被駆動装置毎に設定される警戒範囲RWを、それぞれ監視する。
【0070】
このため、自動分析装置40は、侵入検知装置20の差分画像形成部25が形成する差分画像に基づいて検知部27が監視領域への障害物の侵入を検知すると、制御部16による制御の下に、侵入を検知した監視領域の試薬分注機構6,7、検体分注機構11或いは攪拌装置41の駆動が停止される。
【0071】
従って、自動分析装置40は、侵入検知装置20を使用することによって、試薬分注機構6,7や検体分注機構11のみならず、攪拌装置41と障害物との衝突も適切に回避することができる。
【0072】
(実施の形態4)
次に、本発明の分析装置と侵入検知装置にかかる実施の形態4について、図面を参照しつつ詳細に説明する。実施の形態1の自動分析装置は、カバーに設けた1台の撮像装置を使用したのに対し、実施の形態4の自動分析装置は、更に基台上に設けた支持部材に撮像装置を設置し、2台の撮像装置を使用している。図13は、実施の形態4の自動分析装置の概略構成を示す斜視図である。
【0073】
実施の形態4の自動分析装置50は、実施の形態1の侵入検知装置20を備えており、図13に示すように、カバー1bに取り付けた撮像装置21の他に、基台1a上に設けた支持部材1eに撮像装置21が設置されている。このとき、カバー1bに取り付けた撮像装置21は、基台1aを上方から俯瞰するように撮像する。これに対し、支持部材1eに設置した撮像装置21は、基台1a上に設けた試薬分注機構6,7や検体分注機構11を水平方向から撮像する。そして、支持部材1eに設置した撮像装置21が撮像した水平方向の映像をもとに実施の形態1と同様にして水平方向の監視領域を設定する。
【0074】
このように、自動分析装置50は、侵入検知装置20の差分画像形成部25が形成する差分画像に基づいて検知部27が監視領域への障害物の侵入を検知すると、制御部16による制御の下に、侵入を検知した監視領域の試薬分注機構6,7や検体分注機構11の駆動が停止される。従って、自動分析装置50は、侵入検知装置20を使用することによって、試薬分注機構6,7や検体分注機構11と障害物との衝突を適切に回避することができる。
【0075】
このとき、自動分析装置50は、基台1aを上方から俯瞰する撮像装置21の他に、基台1a上を水平方向から撮像する撮像装置21を設けた。このため、自動分析装置50は、ステレオカメラ28を使用した実施の形態1と同様に、障害物を3次元で検出することができるので、障害物の位置検出精度が向上すると共に、被駆動装置の駆動停止やアラームの発生に関してより一層きめの細かい制御が可能になる。
【0076】
(実施の形態5)
次に、本発明の分析装置と侵入検知装置にかかる実施の形態5について、図面を参照しつつ詳細に説明する。実施の形態1の自動分析装置は、キュベットホイールが1であったのに対し、実施の形態5の自動分析装置は、実施の形態1の自動分析装置を1ユニットとして複数の分析ユニットを有している。図14は、実施の形態5の自動分析装置の外観を示す斜視図である。図15は、図14の自動分析装置のカバーを外して複数の分析ユニットの上面を概略構成と共に示す平面図である。図16は、図15の1つの分析ユニットを拡大した拡大図である。
【0077】
実施の形態5の自動分析装置60は、実施の形態1の侵入検知装置20の他に、図14及び図15に示すように、サンプラ61、搬送装置70に沿って並列して設けられる分析ユニット62〜65、搬送制御部68、中央制御装置69及び搬送装置70を備えている。ここで、自動分析装置60は、分析ユニット63〜65として実施の形態1の自動分析装置1を使用しており、撮像装置21を取り付けたカバー1b(図14参照)は、図15において、中央制御装置69側を中心として搬送装置70側を上方へ跳ね上げるようにして開かれる。
【0078】
サンプラ61は、分析ユニット62〜65と共に並列して設けられており、ラック供給部61c、ラック回収部61d及びラック収納部61eを有している。ラック供給部61cは、検体容器10aを保持した複数のラック10がセットされる部分であり、ラック回収部61dと共に中央制御装置69からの制御の下に作動し、これらのラック10を順次搬送装置70の追い越しライン71又は搬送ライン72に送り出す。ラック回収部61dは、戻しライン73によって搬送されてくるラック10を回収してラック収納部61eに搬送する。これにより、分析終了後の検体容器10aを保持したラック10は、ラック収納部61eに収納される。また、サンプラ61は、複数のラック10の搬送装置70への送り出し位置にバーコードリーダ61aが設けられている。バーコードリーダ61aは、サンプラ61から搬送装置70へ送り出されるラック10に貼付されたバーコードラベルから情報を読み取り、読み取ったラック情報を中央制御装置69へ出力する。バーコードラベルには、ラック10の種類,ラック番号及び各検体容器10aに保持された検体の分析項目等を含む情報を記録したバーコードが付されている。
【0079】
分析ユニット62〜65は、搬送装置70に沿って並列して設けられ、中央制御装置69の制御の下に作動する。
【0080】
分析ユニット62は、電極法によって検体中のナトリウム,塩素,カリウム,カルシウム,無機リン等のイオンからなる電解質を測定するユニットであり、測定容器62cに検体を分注する検体分注機構11、バーコードリーダ62a及びユニット制御部62bを有しており、自動分析装置1と同様に、基台上を開閉自在に覆うカバー1b(図14参照)が取り付けられている。
【0081】
バーコードリーダ62aは、搬送装置70を臨む位置に追い越しライン71に隣接して設けられ、追い越しライン71や搬送ライン72によって分析ユニット62へ搬送されてきたラック10に貼付されたバーコードラベルから情報を読み取る。バーコードリーダ62aは、読み取ったバーコードに記録された情報を中央制御装置69へ出力する。ユニット制御部62bは、CPU,RAM及びROM等により構成され、中央制御装置69からの指示を受けて検体分注機構11を含む分析ユニット62全体の動作を制御する。ユニット制御部62bは、分析ユニット62における測定項目,測定結果等を含む測定データを中央制御装置69へ出力する。
【0082】
分析ユニット63〜65は、分析ユニット63が生化学項目を、分析ユニット64が免疫項目を、分析ユニット65が遺伝子項目を、それぞれ分析するが、主要構成が同じであるので、分析ユニット63について説明する。
【0083】
分析ユニット63は、実施の形態1の自動分析装置1にバーコードリーダ63a及びユニット制御部63bが設けられている。
【0084】
バーコードリーダ63aは、追い越しライン71や搬送ライン72によって分析ユニット63へ搬送されてきたラック10のバーコードラベルから情報を読み取る。バーコードリーダ63aは、読み取ったバーコードに記録された情報を中央制御装置69へ出力する。ユニット制御部63bは、CPU,RAM及びROM等により構成され、中央制御装置69からの指示を受けて分析ユニット63全体の動作を制御する。ユニット制御部63bは、分析ユニット63における測定項目,測定結果等を含む測定データを中央制御装置69へ出力する。
【0085】
搬送制御部68は、中央制御装置69からの指示を受けてラック供給部61cから送り出されるラック10を追い越しライン71や搬送ライン72に振り分け、分析ユニット65における分析処理が終了したラックを戻しライン73に戻すと共に、戻しライン73を搬送されてくるラック10をラック回収部61dへ回収する等の動作を制御する。
【0086】
中央制御装置69は、自動分析装置60全体を制御するパーソナルコンピュータであり、ディスプレイパネル等の表示部、表示部に表示される情報をプリントアウトするプリンタ自動分析装置60へ分析操作に関連した分析項目等を含む種々の情報を入力する操作を行うキーボードやマウス等の入力部を有している。中央制御装置69は、バーコードリーダ61aから送られてくる情報(検体の分析項目)に基づいてラック10を搬送すべき分析ユニットを決定し、決定した搬送先の分析ユニットを搬送装置70に指示する。また、中央制御装置69は、バーコードリーダ62a〜65aが読み取ったバーコードラベルの情報に基づいてラック10が指示された正規の分析ユニットに搬送されているか否かを確認する。
【0087】
搬送装置70は、中央制御装置69からの指示を受けて駆動され、ベルトコンベアによってラック10を搬送する。搬送装置70は、分析ユニット62〜65の配列方向に沿って互いに並行して配置され、緊急検体や割り込み検体用のラック10を特定の分析ユニットに選択的に搬送する追い越しライン71と、ラック10を分析ユニット62〜65に順次搬送する搬送ライン72と、各分析ユニットに搬送後のラック10をラック回収部61dへ戻す戻しライン73と、ラック10を搬送するラインを変更するラインチェンジャ74を有している。
【0088】
以上のように構成される自動分析装置60は、サンプラ61のラック供給部61cに反応容器5を保持した複数のラック10をセットし、スイッチをオンすると、中央制御装置69の制御の下に、ラック10がラック供給部61cから順次送り出され、搬送装置70によってラック10が分析ユニット62〜65へ搬送される。搬送されたラック10は、搬送先の分析ユニット62〜65に配置されたバーコードリーダ62a〜65aが読み取ったバーコードラベルの情報に基づいてラック10が指示された正規の分析ユニットに搬送されているか否かが確認され、正規の場合にはその分析ユニットで分析が開始される。搬送先が誤っている場合、中央制御装置69の制御の下に、ラック10は、搬送装置70によって正規の分析ユニットへ転送される。そして、自動分析装置60は、搬送先の分析ユニットで反応容器5内の検体が分析された後、搬送装置70によってラック10がサンプラ61へ戻され、ラック回収部61dで回収される。
【0089】
このとき、自動分析装置60は、分析ユニット62〜65において、搬送装置70によって搬送されるラック10から検体分注機構11が検体を分注する。このため、検体分注機構11の作動範囲RMは、搬送装置70上まで及んでいる。従って、自動分析装置60の各分析ユニットにおいては、カバー2bに取り付ける撮像装置21は、基台上及び搬送装置70上を撮像する画角を有するものを使用する。
【0090】
一方、設定部26は、分析ユニット62〜65、例えば、分析ユニット63において、検体分注機構11の作動範囲RMと、作動範囲RM及び作動範囲RM外側の所定幅を有する周辺範囲RCを包含した警戒範囲RWを設定する際、図16に示すように、搬送装置70を含むように設定する。また、設定部26は、試薬分注機構6,7の作動範囲RM及び警戒範囲RWを、図16に示すように設定する。試薬分注装置7は、奥部側にカバー1bがあるので、奥部側に警戒範囲RWを設定する必要がないからである。
【0091】
このようにして作動範囲RM及び警戒範囲RWを設定することにより、差分画像形成部25が差分画像を形成し、差分画像を形成した領域が障害物の侵入を監視する監視領域AMとなる。このため、自動分析装置60においては、分析ユニット63〜65は、カバー1bを開いた場合、実施の形態1の自動分析装置1と同様に、各分析ユニットにおいて、侵入検知装置20の差分画像形成部25が形成する差分画像に基づいて検知部27が監視領域への障害物の侵入を検知する。
【0092】
この場合、検知部27が監視領域への障害物の侵入を検知すると、自動分析装置60は、中央制御装置69による制御の下に、試薬分注機構6,7や検体分注機構11の被駆動装置の駆動が停止される。従って、自動分析装置60は、侵入検知装置20を使用することによって、駆動される試薬分注機構6,7や検体分注機構11と障害物との衝突を適切に回避することができる。
【0093】
尚、本発明の自動分析装置は、実施の形態1〜5の自動分析装置に限定されるものではなく、本発明の目的の範囲内で実施の形態1〜5において説明した自動分析装置の構成を適宜組み合わせて使用してもよい。
【0094】
また、上記実施の形態は、監視領域AMに侵入する障害物としてオペレータの手を例に説明したが、分注装置等の被駆動装置が複数ある分析装置において、これら被駆動装置相互間の軌跡が重なる場合の制御エラーに起因した被駆動装置同士の衝突を侵入検知装置によって事前に検知することもできる。
【図面の簡単な説明】
【0095】
【図1】実施の形態1の自動分析装置の概略構成を示す斜視図である。
【図2】図1に示す自動分析装置の基台の平面図を、制御部等を含むブロック図と共に示す図である。
【図3】自動分析装置で使用する実施の形態1の侵入検知装置を制御部等と共に示すブロック図である。
【図4】自動分析装置の基台上における被駆動装置の作動範囲と周辺範囲を示す模式図である。
【図5】侵入検知装置の監視領域の形状と監視領域と障害物との位置関係を模式的に説明する斜視図である。
【図6】撮像装置の変形例を示す斜視図である。
【図7】撮像装置を基台上に設けた支持部材に設置した自動分析装置の変形例を示す斜視図である。
【図8】被駆動装置の周辺範囲に関する変形例を示す図4に対応する模式図である。
【図9】実施の形態2の自動分析装置の概略構成を示す斜視図である。
【図10】自動分析装置の基台上における被駆動装置の作動範囲と周辺範囲と、各撮像装置が監視する警戒範囲とを示す模式図である。
【図11】実施の形態3の自動分析装置の概略構成を示す斜視図である。
【図12】自動分析装置の基台上における被駆動装置の作動範囲と周辺範囲を攪拌装置と共に示す模式図である。
【図13】実施の形態4の自動分析装置の概略構成を示す斜視図である。
【図14】実施の形態5の自動分析装置の外観を示す斜視図である。
【図15】図14の自動分析装置のカバーを外して複数の分析ユニットの上面を概略構成と共に示す平面図である。
【図16】図15の1つの分析ユニットを拡大した拡大図である。
【符号の説明】
【0096】
1 自動分析装置
1a 基台
2,3 試薬テーブル
4 キュベットホイール
5 反応容器
6,7 試薬分注機構
8 搬送機構
9 フィーダ
10 ラック
11 検体分注機構
12 分析光学系
13 洗浄機構
15 制御部
16 入力部
17 表示部
18 警報装置
19 攪拌装置
20 侵入検知装置
21 撮像装置
21A〜21C 撮像装置
22 撮像制御部
23 画像格納部
24 静止画格納部
25 差分画像形成部
26 設定部
27 検知部
28 ステレオカメラ
30 自動分析装置
40 自動分析装置
41 攪拌装置
50 自動分析装置
60 自動分析装置
61 サンプラ
62〜65 分析ユニット
68 搬送制御部
69 中央制御装置
70 搬送装置
71 追い越しライン
72 搬送ライン
73 戻しライン
74 ラインチェンジャ
AM 監視領域
【特許請求の範囲】
【請求項1】
基台上に設置された被駆動装置と、少なくとも前記被駆動装置を開閉自在に覆うカバーとを有する分析装置において、
前記基台上を撮像する撮像装置と、
前記カバーの開放時に前記撮像装置が撮像した前記基台上の画像を静止画として記録する静止画記録手段と、
前記カバーの開放後、前記撮像装置が撮像した前記基台上の画像と前記静止画との差分画像を形成する差分画像形成手段と、
前記被駆動装置の周囲に前記差分画像を形成する監視領域を設定する設定手段と、
前記差分画像に基づいて前記監視領域への障害物の侵入を検知する検知手段と、
前記検知手段が前記監視領域への障害物の侵入を検知した際に、前記被駆動装置の駆動を停止させ、又は警報装置を作動させる制御手段と、
を備えたことを特徴とする分析装置。
【請求項2】
前記監視領域は、前記基台上の前記被駆動装置の駆動範囲を含む作動範囲外側の所定幅を有する周辺範囲と、前記撮像装置の画角とによって囲まれる領域であることを特徴とする請求項1に記載の分析装置。
【請求項3】
前記監視領域は、前記基台上の前記被駆動装置の駆動範囲を含む作動範囲外側と、前記撮像装置の画角とによって囲まれる領域であることを特徴とする請求項1に記載の分析装置。
【請求項4】
前記検知手段は、前記監視領域が複数存在する場合には、それぞれの監視領域毎に前記障害物の侵入を検知することを特徴とする請求項1〜3のいずれか一つに記載の分析装置。
【請求項5】
前記制御手段は、前記障害物が侵入した前記監視領域の被駆動装置のみ、或いは前記複数の監視領域の被駆動装置総ての駆動を停止させることを特徴とする請求項4に記載の分析装置。
【請求項6】
前記撮像装置は、前記基台全体を一括して撮像する単一の撮像装置であることを特徴とする請求項4に記載の分析装置。
【請求項7】
前記撮像装置は、前記複数の監視領域を個別に撮像する複数の撮像装置であることを特徴とする請求項4に記載の分析装置。
【請求項8】
前記撮像装置は、前記カバーの前記基台を臨む位置に設けられていることを特徴とする請求項1に記載の分析装置。
【請求項9】
前記撮像装置は、略並行な光軸を有する一対の立体撮像光学系を備えることを特徴とする請求項8に記載の分析装置。
【請求項10】
前記撮像装置は、前記基台上に設けた支持部材に設置されていることを特徴とする請求項1に記載の分析装置。
【請求項11】
前記撮像装置は、複数台設けられていることを特徴とする請求項8に記載の分析装置。
【請求項12】
前記撮像装置は、2台設けられ、
一方の撮像装置は、前記カバーの前記基台を臨む位置に設けられ、
他方の撮像装置は、前記基台上の前記被駆動装置を水平方向側方から撮像する位置に設けられていることを特徴とする請求項1に記載の分析装置。
【請求項13】
前記被駆動装置は、検体又は試薬を分注する分注機構或いは液体を攪拌する攪拌装置であることを特徴とする請求項1に記載の分析装置。
【請求項14】
基台上に設置され、検体又は試薬を分注する分注機構と、少なくとも前記分注機構を開閉自在に覆うカバーとを有する分析装置において、
前記基台上を撮像する撮像装置と、
前記カバーの開放時に前記撮像装置が撮像した前記基台上の画像を静止画として記録する静止画記録手段と、
前記撮像装置から出力される画像出力と前記静止画記録手段から出力される静止画出力とをもとに前記撮像装置が撮像した画像に基づいて前記分注機構の周囲に設定される監視領域への障害物の侵入を検知する検知手段と、
前記検知手段が前記監視領域への障害物の侵入を検知した際に、前記分注機構の駆動を停止させ、又は警報装置を作動させる制御手段と、
を備えたことを特徴とする分析装置。
【請求項15】
さらに、分注された前記検体と試薬とを攪拌する攪拌手段が設けられていることを特徴とする請求項14に記載の分析装置。
【請求項16】
基台上に設置され、検体又は試薬を分注する分注機構と、少なくとも前記分注機構を開閉自在に覆うカバーとを有する分析ユニットがラックを搬送する搬送装置に沿って複数並列して設けられた分析装置において、
前記基台上及び搬送装置上を撮像する撮像装置と、
前記カバーの開放時に前記撮像装置が撮像した前記基台上及び搬送装置上の画像を静止画として記録する静止画記録手段と、
前記撮像装置から出力される画像出力と前記静止画記録手段から出力される静止画出力とをもとに前記撮像装置が撮像した画像に基づいて前記分注機構の周囲に設定される監視領域への障害物の侵入を検知する検知手段と、
前記検知手段が前記監視領域への障害物の侵入を検知した際に、前記分注機構の駆動を停止させ、又は警報装置を作動させる制御手段と、
を備えたことを特徴とする分析装置。
【請求項17】
物体を移送する移送機構が駆動される第一の範囲及び当該第一の範囲の外側の第二の範囲を撮像する撮像装置と、
前記撮像装置が撮像した前記第一及び第二の範囲の画像を静止画として記録する静止画記録手段と、
前記撮像装置から出力される画像出力と前記静止画記録手段から出力される静止画出力とをもとに前記撮像装置が撮像した画像に基づいて前記移送機構の周囲に設定される監視領域への障害物の侵入を検知する検知手段と、
を備えたことを特徴とする侵入検知装置。
【請求項1】
基台上に設置された被駆動装置と、少なくとも前記被駆動装置を開閉自在に覆うカバーとを有する分析装置において、
前記基台上を撮像する撮像装置と、
前記カバーの開放時に前記撮像装置が撮像した前記基台上の画像を静止画として記録する静止画記録手段と、
前記カバーの開放後、前記撮像装置が撮像した前記基台上の画像と前記静止画との差分画像を形成する差分画像形成手段と、
前記被駆動装置の周囲に前記差分画像を形成する監視領域を設定する設定手段と、
前記差分画像に基づいて前記監視領域への障害物の侵入を検知する検知手段と、
前記検知手段が前記監視領域への障害物の侵入を検知した際に、前記被駆動装置の駆動を停止させ、又は警報装置を作動させる制御手段と、
を備えたことを特徴とする分析装置。
【請求項2】
前記監視領域は、前記基台上の前記被駆動装置の駆動範囲を含む作動範囲外側の所定幅を有する周辺範囲と、前記撮像装置の画角とによって囲まれる領域であることを特徴とする請求項1に記載の分析装置。
【請求項3】
前記監視領域は、前記基台上の前記被駆動装置の駆動範囲を含む作動範囲外側と、前記撮像装置の画角とによって囲まれる領域であることを特徴とする請求項1に記載の分析装置。
【請求項4】
前記検知手段は、前記監視領域が複数存在する場合には、それぞれの監視領域毎に前記障害物の侵入を検知することを特徴とする請求項1〜3のいずれか一つに記載の分析装置。
【請求項5】
前記制御手段は、前記障害物が侵入した前記監視領域の被駆動装置のみ、或いは前記複数の監視領域の被駆動装置総ての駆動を停止させることを特徴とする請求項4に記載の分析装置。
【請求項6】
前記撮像装置は、前記基台全体を一括して撮像する単一の撮像装置であることを特徴とする請求項4に記載の分析装置。
【請求項7】
前記撮像装置は、前記複数の監視領域を個別に撮像する複数の撮像装置であることを特徴とする請求項4に記載の分析装置。
【請求項8】
前記撮像装置は、前記カバーの前記基台を臨む位置に設けられていることを特徴とする請求項1に記載の分析装置。
【請求項9】
前記撮像装置は、略並行な光軸を有する一対の立体撮像光学系を備えることを特徴とする請求項8に記載の分析装置。
【請求項10】
前記撮像装置は、前記基台上に設けた支持部材に設置されていることを特徴とする請求項1に記載の分析装置。
【請求項11】
前記撮像装置は、複数台設けられていることを特徴とする請求項8に記載の分析装置。
【請求項12】
前記撮像装置は、2台設けられ、
一方の撮像装置は、前記カバーの前記基台を臨む位置に設けられ、
他方の撮像装置は、前記基台上の前記被駆動装置を水平方向側方から撮像する位置に設けられていることを特徴とする請求項1に記載の分析装置。
【請求項13】
前記被駆動装置は、検体又は試薬を分注する分注機構或いは液体を攪拌する攪拌装置であることを特徴とする請求項1に記載の分析装置。
【請求項14】
基台上に設置され、検体又は試薬を分注する分注機構と、少なくとも前記分注機構を開閉自在に覆うカバーとを有する分析装置において、
前記基台上を撮像する撮像装置と、
前記カバーの開放時に前記撮像装置が撮像した前記基台上の画像を静止画として記録する静止画記録手段と、
前記撮像装置から出力される画像出力と前記静止画記録手段から出力される静止画出力とをもとに前記撮像装置が撮像した画像に基づいて前記分注機構の周囲に設定される監視領域への障害物の侵入を検知する検知手段と、
前記検知手段が前記監視領域への障害物の侵入を検知した際に、前記分注機構の駆動を停止させ、又は警報装置を作動させる制御手段と、
を備えたことを特徴とする分析装置。
【請求項15】
さらに、分注された前記検体と試薬とを攪拌する攪拌手段が設けられていることを特徴とする請求項14に記載の分析装置。
【請求項16】
基台上に設置され、検体又は試薬を分注する分注機構と、少なくとも前記分注機構を開閉自在に覆うカバーとを有する分析ユニットがラックを搬送する搬送装置に沿って複数並列して設けられた分析装置において、
前記基台上及び搬送装置上を撮像する撮像装置と、
前記カバーの開放時に前記撮像装置が撮像した前記基台上及び搬送装置上の画像を静止画として記録する静止画記録手段と、
前記撮像装置から出力される画像出力と前記静止画記録手段から出力される静止画出力とをもとに前記撮像装置が撮像した画像に基づいて前記分注機構の周囲に設定される監視領域への障害物の侵入を検知する検知手段と、
前記検知手段が前記監視領域への障害物の侵入を検知した際に、前記分注機構の駆動を停止させ、又は警報装置を作動させる制御手段と、
を備えたことを特徴とする分析装置。
【請求項17】
物体を移送する移送機構が駆動される第一の範囲及び当該第一の範囲の外側の第二の範囲を撮像する撮像装置と、
前記撮像装置が撮像した前記第一及び第二の範囲の画像を静止画として記録する静止画記録手段と、
前記撮像装置から出力される画像出力と前記静止画記録手段から出力される静止画出力とをもとに前記撮像装置が撮像した画像に基づいて前記移送機構の周囲に設定される監視領域への障害物の侵入を検知する検知手段と、
を備えたことを特徴とする侵入検知装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2007−303885(P2007−303885A)
【公開日】平成19年11月22日(2007.11.22)
【国際特許分類】
【出願番号】特願2006−130468(P2006−130468)
【出願日】平成18年5月9日(2006.5.9)
【出願人】(000000376)オリンパス株式会社 (11,466)
【Fターム(参考)】
【公開日】平成19年11月22日(2007.11.22)
【国際特許分類】
【出願日】平成18年5月9日(2006.5.9)
【出願人】(000000376)オリンパス株式会社 (11,466)
【Fターム(参考)】
[ Back to top ]