
分析装置及び位置確認方法
【課題】容器に対するピペットの相対位置にずれが生じているか否かを容易に確認することができる分析装置を提供する。
【解決手段】液体を収容可能な容器を保持する容器保持部と、ピペットを備えており、当該ピペットを下降させて、前記容器保持部によって保持された容器内に収容された液体を吸引する、及び/又は、当該容器内に液体を吐出する液体分注部と、前記容器保持部に保持された容器又は前記容器保持部と前記ピペットとの接触を検知する接触検知部と、前記ピペットの先端を、前記容器又は前記容器保持部に設けられた開口内の水平方向における複数の位置に配置させるよう前記液体分注部を制御し、前記接触検知部により前記容器又は前記容器保持部と前記ピペットとの接触が検知されたか否かを判定する位置確認処理を実行する制御部とを備えている。
【解決手段】液体を収容可能な容器を保持する容器保持部と、ピペットを備えており、当該ピペットを下降させて、前記容器保持部によって保持された容器内に収容された液体を吸引する、及び/又は、当該容器内に液体を吐出する液体分注部と、前記容器保持部に保持された容器又は前記容器保持部と前記ピペットとの接触を検知する接触検知部と、前記ピペットの先端を、前記容器又は前記容器保持部に設けられた開口内の水平方向における複数の位置に配置させるよう前記液体分注部を制御し、前記接触検知部により前記容器又は前記容器保持部と前記ピペットとの接触が検知されたか否かを判定する位置確認処理を実行する制御部とを備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は分析装置及び位置確認方法に関する。
【背景技術】
【0002】
従来、試薬搬送テーブル、キュベット搬送テーブル、検体サンプラ等の搬送ユニットによって搬送されるキュベット等の容器に収容された試薬、検体、それらの混合液等の液体をピペットを介して吸引又は吐出し、検体を分析する検体分析装置が知られている。
【0003】
このような検体分析装置を長期間使用していると、ピペットを備えた試薬分注部等を駆動する機構の劣化等(駆動ベルトの伸び等)により当該ピペットの停止位置が徐々に所定の停止位置からずれてくる場合がある。このような状態でピペットを下降させ、ピペットが試薬容器等に接触してしまった場合に、なお下降動作を継続すると、ピペットや試薬容器を破損するおそれがある。そこで、センサによってピペットと試薬容器の接触を検出し、接触を検出した場合には分注動作を停止させる分析装置が知られている(例えば特許文献1)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平1−221673号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら上記のような分析装置では、ピペットと容器の位置関係に多少のずれが生じても、ピペットが容器に接触するほどのずれでなければ分注動作を継続して行なうことが可能である。そのため、検体の測定中に実際にピペットが障害物に接触して分注動作が中断されるまではピペットと容器との間の位置関係にずれが生じていることが判明しないという問題があった。
【0006】
本発明は、このような事情に鑑みてなされたものであり、容器とピペットとの相対位置にずれが生じているか否かを容易に確認することができる分析装置及び位置確認方法を提供することを目的としている。
【課題を解決するための手段】
【0007】
(1)本発明の第1の観点に係る分析装置は、液体を収容可能な容器を保持する容器保持部と、
ピペットを備えており、当該ピペットを下降させて、前記容器保持部によって保持された容器内に収容された液体を吸引する、及び/又は、当該容器内に液体を吐出する液体分注部と、
前記容器保持部に保持された容器又は前記容器保持部と前記ピペットとの接触を検知する接触検知部と、
前記ピペットの先端を、前記容器又は前記容器保持部に設けられた開口内の水平方向における複数の位置に配置させるよう前記液体分注部を制御し、前記接触検知部により前記容器又は前記容器保持部と前記ピペットとの接触が検知されたか否かを判定する位置確認処理を実行する制御部と
を備えたことを特徴としている。
【0008】
本発明の分析装置では、位置調整確認処理によって、容器搬送部に保持された容器又は当該容器搬送部に設けられた開口を所定の停止位置まで移動させるとともに、ピペットの先端を、前記容器又は開口の中心からずれた複数の位置に配置させる。この複数の位置は、容器又は開口の中心からの方向が互いに異なる複数の位置である。このようにピペットの先端を容器又は開口の中心から意図的にずらして配置させて、当該ピペットの先端と容器又は開口の内面等との接触が検知されたか否かを判定することで、分析装置は、容器搬送部と液体分注部の位置調整状態が正常であるか否かを確認することができる。換言すれば、容器搬送部と液体分注部との間に相対的な位置ずれが生じているか否かを確認することができる。そして、位置ずれが確認された場合には、容器搬送部及び液体分注部の少なくとも一方の移動動作に異常があるとして、適当なタイミングで当該容器搬送部及び液体分注部の駆動機構等のメンテナンスを行うことができる。早めにメンテナンスを行うことで、ピペットが容器に衝突して破損する等のトラブルを回避することができる。
【0009】
(2)前記(1)の分析装置において、前記容器保持部は、保持した容器を搬送する容器搬送部であり、
前記制御部は、前記位置確認処理において、前記開口が所定の停止位置に位置するよう前記容器搬送部を制御するとともに、前記ピペットの先端を、前記開口内の水平方向における複数の位置に配置させるよう前記液体分注部を制御してもよい。
【0010】
(3)前記(1)又は(2)の分析装置において、前記複数の位置は、前記開口の中心から水平方向にずれた複数の位置であって当該中心からの方向が互いに異なる複数の位置であってもよい。
【0011】
(4)前記(3)の分析装置において、前記位置確認処理では、前記開口の中心から互いに逆方向にずれた複数の位置で、前記ピペットの先端を当該開口内に配置させてもよい。
【0012】
(5)前記(3)又は(4)の分析装置において、前記位置確認処理では、前記ピペットを、前記開口の中心から水平方向にずれた位置から下降させることにより、当該ピペットの先端を前記開口内に配置させてもよい。
【0013】
(6)前記(5)の分析装置において、前記位置確認処理では、液体の吸引又は吐出時におけるピペットの下降速度よりも低速で当該ピペットを下降させて前記ピペットの先端を前記開口内に配置させてもよい。
【0014】
(7)前記(1)〜(6)の分析装置において、前記液体の測定開始指示を受け付ける測定開始指示受付手段をさらに備えており、
前記制御部は、前記測定開始指示受付手段が前記液体の測定開始指示を受け付けると、前記位置確認処理を実行してもよい。
【0015】
(8)前記(7)の分析装置において、前記制御部は、前記測定開始指示受付手段が前記液体の測定開始指示を受け付けると、前記位置確認処理により前記接触検知部が前記容器又は容器保持部と前記ピペットとの接触を検知したとしても、前記液体の測定を続行してもよい。
【0016】
(9)前記(1)〜(8)の分析装置において、前記容器搬送部及びピペットが金属で作製されており、
前記接触検知部は、前記ピペットの前記容器保持部との接触を検知する静電容量式の接触検知部であってもよい。
【0017】
(10)前記(3)、(4)、及び(7)〜(9)の分析装置において、前記位置確認処理では、前記ピペットを前記開口内に下降させた後に当該ピペットの先端を、前記開口の中心から水平方向にずれた複数の位置に配置させてもよい。
【0018】
(11)前記(1)〜(10)の分析装置において、前記接触検知部による検知結果を表示する表示部をさらに備えていてもよい。
【0019】
(12)前記(1)〜(11)の分析装置において、前記接触検知部による検知結果を外部に送信可能な送信部をさらに備えていてもよい。
【0020】
(13)前記(7)〜(12)の分析装置において、前記液体は、精度管理用検体であり、
前記測定開始指示受付手段は、前記精度管理用検体の測定開始指示を受け付ける精度管理開始指示受付手段であり、
前記制御部は、前記精度管理開始指示受付手段が精度管理用検体の測定開始指示を受け付けると、前記位置確認処理を実行してもよい。
【0021】
(14)本発明の第2の観点に係る分析装置は、液体を収容可能な容器を保持し、保持した容器を搬送する容器搬送部と、
ピペットを備えており、当該ピペットを下降させて、前記容器搬送部によって搬送された容器内に収容された液体を吸引する、及び/又は、当該容器内に液体を吐出する液体分注部と、
前記容器搬送部に保持された容器又は前記容器搬送部と前記ピペットとの接触を検知する接触検知部と、
前記容器又は前記容器搬送部に設けられた開口が水平方向における複数の停止位置に位置するよう前記容器搬送部を制御するとともに、それぞれの停止位置において、前記ピペットの先端を、前記開口内に配置させるよう前記液体分注部を制御し、前記接触検知部により前記容器又は前記容器搬送部と前記ピペットとの接触が検知されたか否かを判定する位置確認処理を実行する制御部と
を備えたことを特徴としている。
【0022】
(15)本発明の第3の観点に係る分析装置は、液体を収容可能な容器を保持する容器保持部と、
前記容器を把持する把持部を備えており、当該把持部により把持された容器を前記容器保持部に移動させることができ、さらに位置検査用の棒状体を実質的に垂直な状態で装着することができる容器移動部と、
前記容器保持部に保持された容器又は前記容器保持部と前記容器移動部に装着された棒状体との接触を検知する接触検知部と、
前記棒状体の先端を、前記容器又は前記容器保持部に設けられた開口内の水平方向における複数の位置に配置させるよう前記容器移動部を制御し、前記接触検知部により前記容器又は前記容器保持部と前記棒状体との接触が検知されたか否かを判定する位置確認処理を実行する制御部と
を備えたことを特徴としている。
【0023】
(16)本発明の位置確認方法は、液体を収容可能な容器を保持する容器保持部と、前記容器保持部によって保持された容器内に収容された液体を吸引する、及び/又は、当該容器内に液体を吐出するピペットと、を有する分析装置における、ピペットの位置確認方法であって、
ピペットの先端を、前記容器又は前記容器保持部に設けられた開口内の水平方向における複数の位置に配置させる配置ステップと、
前記配置ステップの実行中に、前記容器保持部に保持された容器又は前記容器保持部と前記ピペットとの接触を検知した場合に、通知を出力する出力ステップと、を有することを特徴としている。
【0024】
(17)前記(16)の位置確認方法において、前記容器保持部は水平方向に移動可能であり、前記ピペットは水平方向及び上下方向に移動可能であってもよい。
【発明の効果】
【0025】
本発明の分析装置及び位置確認方法によれば、容器に対するピペットの相対位置にずれが生じているか否かを容易に確認することができる。
【図面の簡単な説明】
【0026】
【図1】本発明の分析装置の一実施の形態である検体分析装置の全体構成を示す斜視説明図である。
【図2】図1に示される検体分析装置の測定装置の概略構成を示す平面説明図である。
【図3】第1試薬分注ユニットの構成を概略的に示す側面図である。
【図4】第1試薬分注ユニットにおけるアーム及び接触検出用センサを示す斜視説明図である。
【図5】検体分析装置の測定装置の構成を示すブロック図である。
【図6】測定装置の制御部の構成を示すブロック図である。
【図7】制御装置の構成を示すブロック図である。
【図8】位置確認の一例のフローチャート(前半部)である。
【図9】位置確認の一例のフローチャート(後半部)である。
【図10】位置確認の説明図である。
【図11】キュベットの一例の斜視説明図である。
【図12】他の実施の形態に係る位置確認の説明図である。
【図13】さらに他の実施の形態におけるキャッチャユニットの側面説明図である。
【図14】さらに他の実施の形態におけるキャッチャユニットの斜視説明図である。
【発明を実施するための形態】
【0027】
以下、添付図面を参照しつつ、本発明の分析装置の実施の形態を詳細に説明する。
<第1実施形態>
図1は、第1実施形態に係る検体分析装置1の全体構成を示す斜視説明図であり、図2は、検体分析装置1の測定装置の概略構成を示す平面説明図である。
【0028】
検体分析装置1は、血液の凝固・線溶機能に関連する特定の物質の量や活性の度合いを光学的に測定して分析するための装置であり、検体としては血漿を用いる。本実施の形態に係る検体分析装置1では、凝固時間法、合成基質法及び免疫比濁法を用いて検体の光学的な測定を行っている。本実施の形態で用いる凝固時間法は、検体が凝固する過程を透過光の変化として検出する測定方法である。そして、測定項目としては、PT(プロトロンビン時間)、APTT(活性化部分トロンボプラスチン時間)やFbg(フィブリノーゲン量)等がある。また、合成基質法の測定項目としてはATIII等があり、免疫比濁法の測定項目としてはDダイマー、FDP等がある。
【0029】
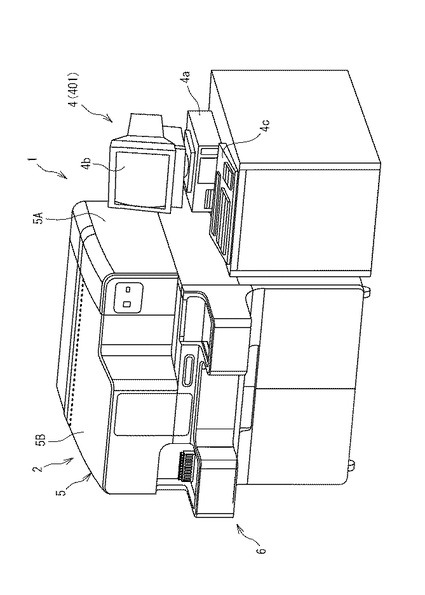
検体分析装置1は、図1及び図2に示されるように、測定装置2と、この測定装置2に電気的に接続された制御装置4とで構成されている。また、測定装置2は、測定機構部5と、測定機構部5の前面側に配置された搬送機構部6とで構成され、測定機構部5は、筐体5A及びカバー体5Bによって覆われている。カバー体5Bは、筐体5Aの前上部左側に開閉可能に取り付けられている。そして、カバー体5Bを開くことによって測定機構部5の前部側を外部に露出させることができる。
【0030】
〔搬送機構部の構成〕
搬送機構部6は、図2に示されるように、測定機構部5に検体を供給するために、検体を収容した複数本の検体容器13が保持された検体ラック14を搬送路6a上で左右方向に搬送し、検体容器13を所定の検体吸引位置15a,15bに位置づける機能を有している。また、搬送機構部6は、未処理の検体を収容した検体容器13が収納された検体ラック14をセットするためのラックセット領域6bと、処理済みの検体を収容した検体容器13が収納された検体ラック14を収容するためのラック収容領域6cとを搬送路6aの両端に有している。また、搬送機構部6は、検体容器13に貼付されたバーコードを読み取るための検体バーコードリーダ16を備えている。
【0031】
〔測定機構部の構成〕
測定機構部5は、搬送機構部6から供給された検体に対して光学的な測定を行うことにより、供給された検体に関する光学的な情報を取得することができるように構成されている。本実施の形態では、搬送機構部6の検体ラック14に載置された検体容器13から測定機構部5のキュベット内に分注された検体に対して光学的な測定が行われる。
【0032】
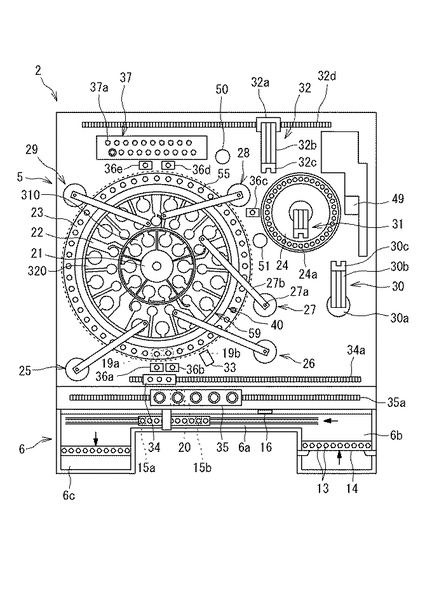
測定機構部5は、第1試薬テーブル21、第2試薬テーブル22、キュベットテーブル23、加温テーブル24、第1検体分注ユニット25、第2検体分注ユニット26、第1試薬分注ユニット27、第2試薬分注ユニット28、第3試薬分注ユニット29、第1キャッチャユニット30、第2キャッチャユニット31、第3キャッチャユニット32、試薬バーコードリーダ33、キュベット搬送機34、希釈液搬送機35、ピペット洗浄器36a〜36e、及び検出ユニット37等を備えている。
【0033】
第1試薬テーブル21、第2試薬テーブル22、キュベットテーブル23及び加温テーブル24は円形状のテーブルであり、それぞれステッピングモータ等の駆動部によって時計回り及び反時計回りの両方に独立して回転駆動される。第1試薬テーブル21は試薬テーブル駆動部97により駆動され、第2試薬テーブル22は試薬テーブル駆動部98により駆動される。キュベットテーブル23はキュベットテーブル駆動部142により駆動される。また、加温テーブル24は加温テーブル駆動部143により駆動される。
【0034】
また、第1試薬テーブル21及び第2試薬テーブル22は、試薬庫40(試薬保冷部)内に配置され、この第1試薬テーブル21及び第2試薬テーブル22上に試薬が収容された試薬容器を保持する第1試薬容器ラック310及び第2試薬容器ラック320がセットされる。
【0035】
図3は、第1試薬分注ユニット27の構成を概略的に示す側面図である。
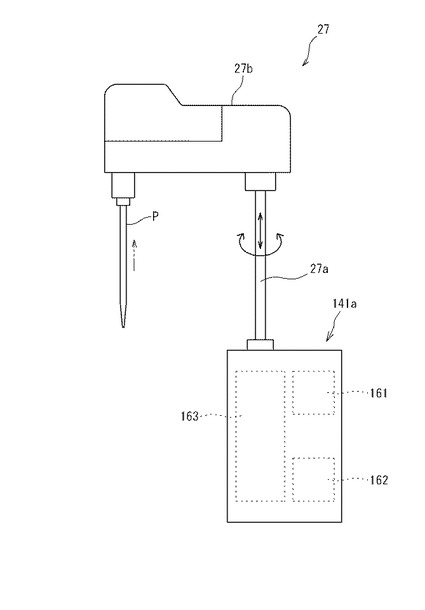
第1試薬分注ユニット27は、アーム27bを、軸27aを中心に回動させるとともに上下方向に移動させることができる駆動部141a(141)を備えている。アーム27bの先端部には、検体等の吸引及び吐出を行うためのピペットPが取り付けられている。
【0036】
駆動部141aは、回転用モータ161と、昇降用モータ162と、回転用モータ161及び昇降用モータ162の動力を軸27aに伝達する伝達機構163とを備えている。伝達機構163は、例えば回転用モータ161の回転動力を減速して軸27aに伝達するベルト伝達機構やギヤ機構等、昇降用モータ162の回転動力を上下方向の直線動力に変換して軸27aに伝達するベルト伝達機構やラック・ピニオン機構等からなる。回転用モータ161及び昇降用モータ162は、ステッピングモータからなっており、その回転パルスはエンコーダ(図示せず)によって検出される。
【0037】
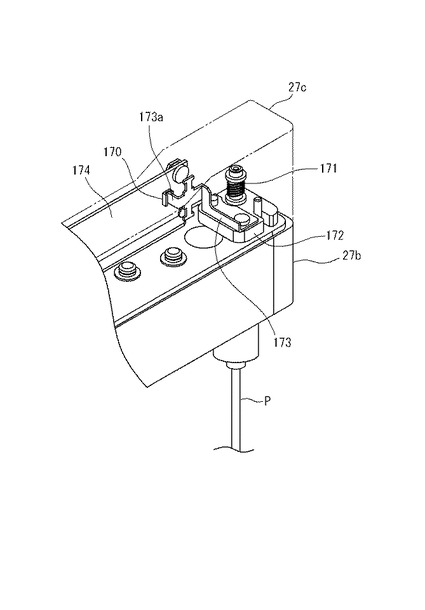
図4は、第1試薬検体分注ユニット27におけるアーム27b及び接触検出用センサを示す斜視説明図である。図4には、上部カバー27c(2点鎖線で示す)が取り外されることによって内部が露出したアーム27bが示されている。ピペットPは、アーム27bに上下方向に移動可能に支持されるとともに、下方への移動が所定に規制されている。また、ピペットPは、圧縮コイルバネからなる付勢部材171によって下方へ付勢されている。アーム27bには、ピペットPとともに上下方向に移動可能な台座172が設けられ、この台座172上に検知部材173が取り付けられている。アーム27bには回路基板174が立設され、この回路基板174に接触検出用センサ170が取り付けられている。
【0038】
接触検出用センサ170は、投光部と受光部とを有する透過型センサからなる。検知部材173には、接触検出用センサ170の投受光部の間に配置される遮光板173aが設けられている。遮光板173aは、正常時に接触検出用センサ170を遮光し、当該接触検出用センサ170をオフ状態とする。ピペットPが下降して容器の内周面と強く接触したり、当該容器の開口周縁部に衝突したりすると、アーム27bに対してピペットPが上昇し、台座172を介して遮光板173aも上昇するため、接触検出用センサ170の遮光が解除される。これにより接触検出用センサ170がオンとなった場合に、前記第1試薬分注ユニット25等の機構の動作制御を行う制御部501により、ピペットPが容器等に接触ないし衝突したことが検知される。
【0039】
第1検体分注ユニット25、第2検体分注ユニット26、第2試薬分注ユニット28及び第3試薬分注ユニット29についても、第1試薬分注ユニット27と同様の構成を備えている。すなわち、これらユニット25、26、28,29は、それぞれアーム及びピペットを有し、アームは、駆動部によって回転駆動、昇降駆動される。前記ピペットを用いて検体や試薬が吸引・吐出される。第1検体分注ユニット25は、駆動部141bにより駆動され、第2検体分注ユニット26は、駆動部141cにより駆動される。第2試薬分注ユニット28は、駆動部141dにより駆動され、第3試薬分注ユニット29は、駆動部141eにより駆動される。
【0040】
第1キャッチャユニット30は、支持部30aと、この支持部30aによって支持される伸縮可能なアーム30bと、アーム30bの先端部に設けられた把持部30cとで構成されている。アーム30bは、ステッピングモータ等で構成された駆動部144aによって回転駆動され、把持部30cはキュベットを把持する。第2キャッチャユニット31についても、第1キャッチャユニット30と同様の構成となっており、ステッピングモータ等で構成された駆動部144bによって駆動される。
【0041】
第3キャッチャユニット32は、支持部32aと、この支持部32aによって支持される伸縮可能なアーム32bと、アーム32bの先端の把持部32cとで構成されている。支持部32aは、左右方向に配置されたレール32dに沿って駆動部144cによって駆動される。把持部32cはキュベットを把持することができる。
【0042】
試薬バーコードリーダ33は、試薬庫40内に収納された試薬容器や、この試薬容器を保持する試薬容器ラック310,320に貼付されたバーコードを読み取る。試薬バーコードリーダ33は、試薬庫40の外側に配置されており、試薬庫40に形成され且つシャッタにより開閉されるスリット(図示せず)を介して試薬庫40内のバーコードを読み取ることが可能となっている。
【0043】
キュベット搬送機34と、希釈液搬送機35は、それぞれレール34a,35a上を左右方向に駆動する。キュベット搬送機34と希釈液搬送機35には、それぞれ、キュベット及び希釈液容器を保持するための保持孔が形成されている。
【0044】
測定機構部5には、キュベット口49、廃棄口50,51が設けられている。キュベット口49には、常に新しいキュベットが供給される。新しいキュベットは、第1キャッチャユニット30と、第2キャッチャユニット31により、キュベット搬送機34の保持孔とキュベットテーブル23の保持孔にセットされる。廃棄口50,51は、分析が終了し不要となったキュベットを廃棄するための孔である。検体分析装置1の筐体5A内には、廃棄されたキュベットを蓄積するキュベット廃棄部(図示せず)が設けられている。
【0045】
ピペット洗浄器36a〜36eは、それぞれ第1、第2検体分注ユニット25,26、及び第1〜第3試薬分注ユニット27〜29のピペットを洗浄するために用いられる。ピペット洗浄器36a〜36eには、ピペットが挿入される孔が上下方向に形成され、この孔に供給された洗浄液によってピペットの外面を洗浄する。
【0046】
検出ユニット37は、上面にキュベットを収容する複数個(図示例では20個)の保持孔37aが形成され、下面裏側に検出部(図示略)が配置されている。保持孔37aにキュベットがセットされると、検出部によってキュベット中の測定試料に含まれる成分を反映した光学的情報が検出される。
【0047】
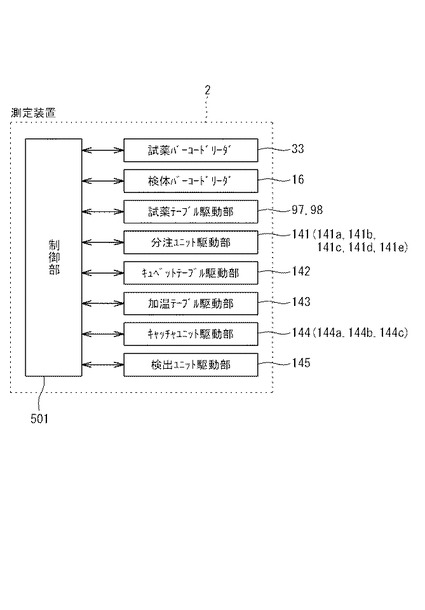
図5は、検体分析装置1の測定装置の構成を示すブロック図であり、図6は、測定装置の制御部の構成を示すブロック図である。図5に示されるように、第1,第2試薬テーブル21,22、キュベットテーブル23、加温テーブル24、第1,第2検体分注ユニット25,26、第1〜第3試薬分注ユニット27〜29、第1〜第3キャッチャユニット30〜32、キュベット搬送機34、希釈液搬送機35、ピペット洗浄器36a〜36e、及び検出ユニット37の各駆動部97,98,141〜145や、試薬バーコードリーダ33、検体バーコードリーダ16等は、測定装置2の制御部501に電気的に接続されており、この制御部501によって動作制御される。検出ユニット37は、取得した光学的情報を制御部501に対して送信することができるように構成されている。分注ユニット駆動部は、駆動部141a、141b、141c、141d及び141eを含む。また、キャッチャユニット駆動部は、駆動部144a、144b及び144cを含む。
【0048】
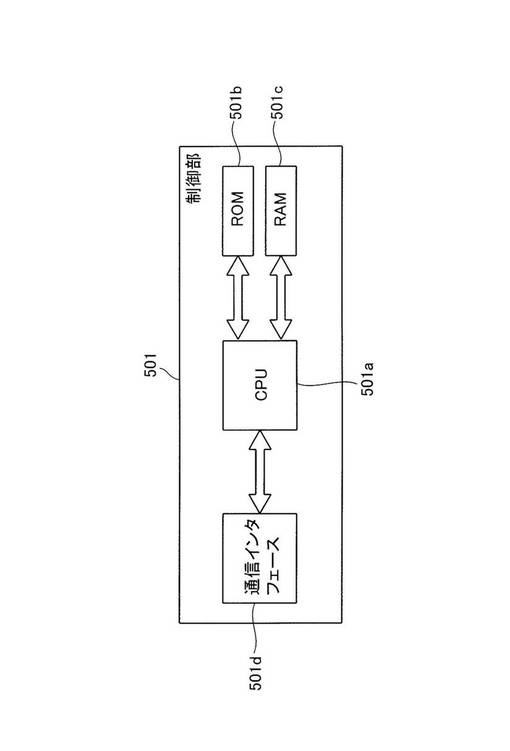
また、図6に示されるように、制御部501は、CPU501aとROM501bと、RAM501cと、通信インタフェース501dとから主として構成されている。CPU501aは、ROM501bに記憶されているコンピュータプログラム及びRAM501cに読み出したコンピュータプログラムを実行することができる。ROM501bは、CPUaに実行させるためのコンピュータプログラム及び当該コンピュータプログラムの実行に用いるデータ等を記憶している。RAM501cは、ROM501bに記憶しているコンピュータプログラム等の読み出しに用いられ、このコンピュータプログラムを実行するときの、CPU501aの作業領域として利用される。
【0049】
通信インタフェース501dは、制御装置4に接続されており、検体の光学的情報を制御装置4に送信するとともに、制御装置4の制御部4aからの信号を受信するための機能を有している。また、通信インタフェース501dは、搬送機構部6及び測定機構部5の各部を駆動するためのCPU501aからの指令を送信するための機能を有する。
【0050】
〔制御装置の構成〕
制御装置4は、パーソナルコンピュータ401(PC)等からなり、図1に示されるように、制御部4aと、表示部4bと、情報を入力するためのキーボード4cとを含んでいる。制御部4aは、測定機構部5の制御部501に当該測定機構部5の動作開始信号を送信するとともに、測定機構部5で得られた検体の光学的な情報を分析するための機能を有している。また、表示部4bは、検体中に存在する干渉物質(ヘモグロビン、乳び(脂質)およびビリルビン)に関する情報と、制御部4aで得られた分析結果とを表示するために設けられている。
【0051】
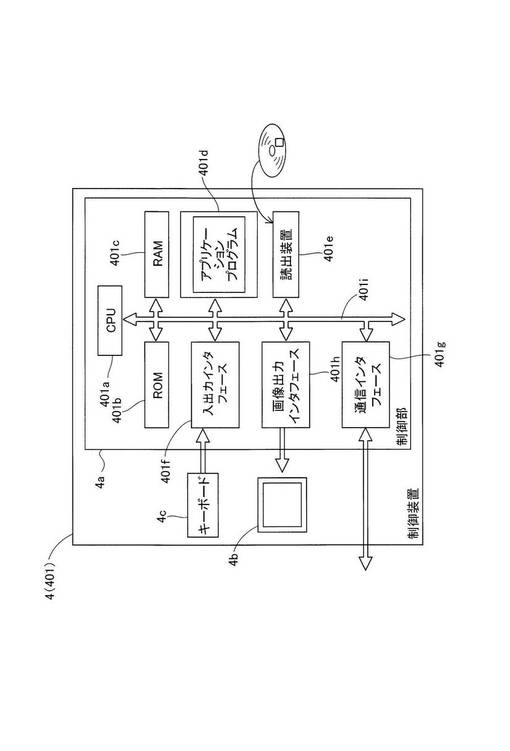
図7は、制御装置4の構成を示すブロック図である。制御部4aは、CPU401aと、ROM401bと、RAM401cと、ハードディスク401dと、読出装置401eと、入出力インタフェース401fと、通信インタフェース401gと、画像出力インタフェース401hとから主として構成されている。CPU401a、ROM401b、RAM401c、ハードディスク401d、読出装置401e、入出力インタフェース401f、通信インタフェース401g、および画像出力インタフェース401hは、バス401iによって接続されている。
【0052】
〔測定装置の動作の概要〕
次に、測定装置2における動作の概要について説明する。まず、図2に示されるように、検体容器13を収容した検体ラック14を搬送機構部6のラックセット領域6bにセットすると、この検体ラック14は、ラックセット領域6bにおいて後端(図中上側)まで送られた後、搬送路6a上を左方向に搬送される。そして、検体容器13に貼付されたバーコードラベルが検体バーコードリーダ16によって読み取られ、続いて、検体容器13が所定の検体吸引位置15aに位置づけられる。なお、検体の吸引が全て終了した検体ラック14は、ラック収容領域6cに搬送される。
【0053】
第1検体分注ユニット25は、搬送機構部6によって所定の検体吸引位置15aに位置づけられた検体容器13から検体を吸引する。第1検体分注ユニット25によって吸引された検体は、キュベットテーブル23の前部の検体吐出位置19aに位置づけられたキュベット保持孔55にセットされたキュベットに吐出される。
【0054】
第2検体分注ユニット26は、キュベットテーブル23の前部の検体吸引位置19bにあるキュベット保持孔55にセットされたキュベットに収容されている検体、又は、搬送機構部6によって所定の検体吸引位置15bに位置づけられた検体容器13の検体を吸引する。第2検体分注ユニット26によって吸引された検体は、キュベット搬送機34にセットされたキュベットに吐出される。なお、第2検体分注ユニット26は、希釈液搬送機35にセットされた希釈液を吸入することができる。この場合、第2検体分注ユニット26は、検体の吸引前に希釈液吸引位置20にて希釈液を吸引した後、検体吸引位置15bにて検体を吸引する。
【0055】
第1検体分注ユニット25及び第2検体分注ユニット26は、分注作業が終わると、それぞれピペットがピペット洗浄器36a,36bの孔に挿入され、この孔に供給された洗浄液によって洗浄される。
【0056】
キュベット搬送機34は、収容したキュベットに検体が吐出されると、所定のタイミングにて、レール34a上を右方向に駆動される。続いて、第1キャッチャユニット30によりキュベット搬送機34にセットされた検体を収容しているキュベットが把持され、加温テーブル24のキュベット保持孔24aにセットされる。
【0057】
続いて、第2キャッチャユニット31は、保持孔24aにセットされた検体を収容しているキュベットを把持し、ピペット洗浄器36cの真上まで移動させる。ここで、第1試薬分注ユニット27は、第1試薬テーブル21又は第2試薬テーブル22に配置されている所定の試薬容器内の試薬を吸引し、第2キャッチャユニット31に把持されているキュベットに試薬を吐出する。第2キャッチャユニット31は、試薬が吐出されたキュベットを攪拌し、加温テーブル24のキュベット保持孔24aにセットする。
【0058】
加温テーブル24のキュベット保持孔24aに保持されているキュベットは、第3キャッチャユニット32により把持され、ピペット洗浄器36dの真上領域又はピペット洗浄器36eの真上領域に位置づけられる。ここで、第2試薬分注ユニット28と第3試薬分注ユニット29は、第1試薬テーブル21又は第2試薬テーブル22に配置されている試薬容器から試薬を吸引し、第3キャッチャユニット32により把持されているキュベットに試薬を吐出する。第3キャッチャユニット32は、試薬が吐出されたキュベットを検出ユニット37の保持孔37aにセットする。その後、検出ユニット37においてキュベットに収容された測定試料から光学的情報が検出される。
【0059】
第1〜第3試薬分注ユニット27〜29は、分注作業が終了すると、それぞれのピペットがピペット洗浄器36c〜36eの孔に挿入され、異なる試薬の分注毎に洗浄される。
検出ユニット37による検出が終了し不要となったキュベットは、第3キャッチャユニット32によって把持され、廃棄口50に廃棄される。キュベットテーブル23のキュベット保持孔55に保持されているキュベットについても、分析が終了して不要になると、キュベットテーブル23の回転によって第2キャッチャユニット31に近い場所に位置づけられる。第2キャッチャユニット31は、キュベット保持孔55に保持されている不要となったキュベットを把持し、廃棄口51に廃棄する。
【0060】
〔位置ずれの確認〕
本実施の形態に係る検体分析装置1では、例えば1日の分析作業が開始される前に行われる精度管理用検体の測定に先立って、ピペットと容器であるキュベットの相対位置にずれが生じているか否かの確認(位置確認)が行われる。本実施の形態において、位置確認において検出の有無が判定されるエラー(後述するステップS7及びステップS12)とは、ピペットがキュベットの内壁に接触すること及びキュベットの鍔部41の上面に衝突すること等の接触の検出を示す。
【0061】
図8〜9は、かかる位置確認の一例(ステップS2〜ステップS15)を含む精度管理検体の測定のフローチャートである。前半部を示す図8と後半部を示す図9は、A点でつながっている。この例では、便宜的に第1試薬分注ユニット27とキュベットテーブル23との位置確認を行っている例を挙げているが、本実施の形態に係る検体分析装置1では、以下の表1に示されるように、ピペットと容器を搬送する容器搬送部との組合せが複数存在しており、他の組合せにおいても図8〜9に示されるフローと同様にして位置確認が行われる。表1において、例えば第1試薬分注ユニット27に装着されたピペットは、キュベットテーブル23、第1試薬テーブル21、第2試薬テーブル22及び加温テーブル24に配置された容器内の液体を吸引するか、又は当該容器内に液体を吐出する。従って、第1試薬分注ユニット27に装着されたピペットと、キュベットテーブル23等の容器搬送部の所定位置(液体の吸引・吐出位置)の容器との間で位置確認が行われる必要がある。
【0062】
【表1】

【0063】
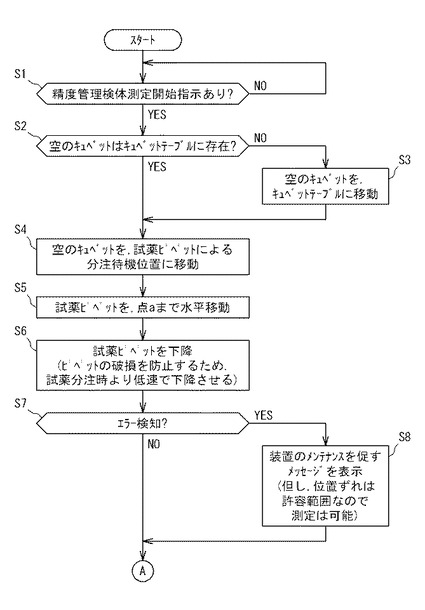
図8に戻って、位置確認の(ステップS2〜ステップS15)を含む精度管理検体の測定の説明を行う。精度管理用検体の測定開始指示は、表示部4bに表示された精度管理検体の測定を行うための精度管理用画面において、ユーザーがキーボード4cを操作又は表示部4bの画面をタッチすることにより行うことができる。これにより、制御装置4の制御部4aは、測定装置2の制御部501に測定開始信号を送信する。まず、測定装置2が起動された後、ステップS1において、測定装置2の制御部501は、制御装置4からの、精度管理用検体の測定開始指示が受信されたか否かを判断する。制御部501は、測定開始指示が受信された(YES)と判断すると、ステップS2に処理を進める。
【0064】
ステップS2において、測定装置2の制御部501は、位置確認に用いる空のキュベット(容器)がキュベットテーブル23に存在しているか否かを判断する。この判断は、例えばキュベットが配置される保持孔に配設された反射型センサからの信号に基づいて行うことができる。制御部501は、空のキュベットがキュベットテーブル23に存在している(YES)と判断した場合には、ステップS4に処理を進め、空のキュベットがキュベットテーブル23に存在していない(NO)と判断した場合には、ステップS3に処理を進める。
【0065】
ステップS3において、測定装置2の制御部501は、駆動部144bにより第2キャッチャユニット31を駆動させて、キュベット口49に供給された空のキュベットをキュベットテーブル23の所定位置に移動させる。
ステップS4において、測定装置2の制御部501は、キュベットテーブル駆動部142を駆動させてキュベットテーブル23に配設された空のキュベットを所定の停止位置、すなわち第1試薬分注ユニット27に装着されたピペットによる分注待機位置まで移動させる。この空のキュベットの移動と並行して、又はキュベットの移動に続いて、測定装置2の制御部501は、第1試薬分注ユニット27の駆動部141aを駆動させて当該第1試薬分注ユニット27に装着されたピペットを所定の待機位置に移動させる。
【0066】
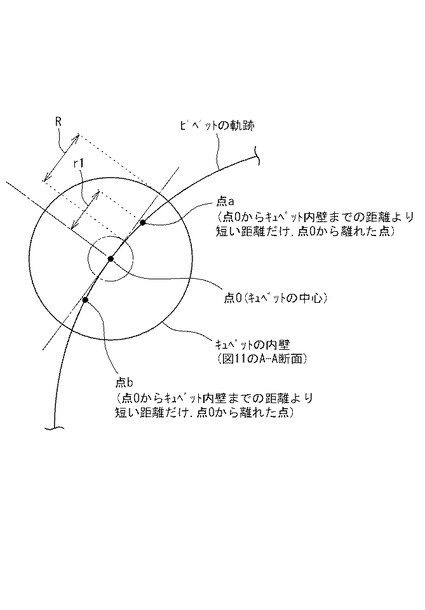
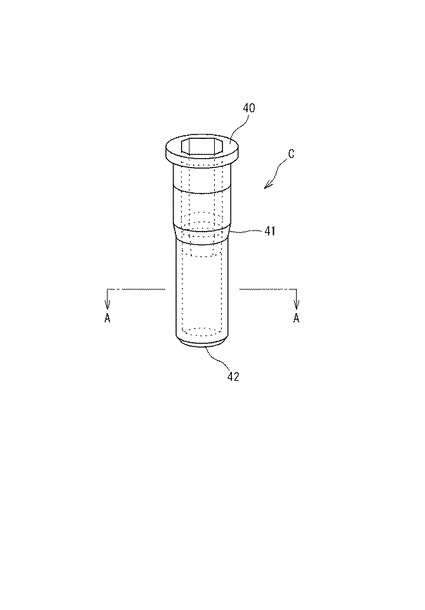
ステップS5において、測定装置2の制御部501は、第1試薬分注ユニット27の駆動部141aを駆動させて当該第1試薬分注ユニット27に装着されたピペットを、キュベットの中心からずれた第1の位置(図10の点a)まで水平移動させる。図10は、本実施の形態における位置確認を説明する図であり、ピペットの軌跡及びキュベットの内壁を模式的に示している。キュベットCは、図11に示されるように、一端側が開放された有底円筒体からなっており、開放された一端側に鍔部40が形成されている。キュベットCの長手方向中央付近には、縮径部41が形成されており、この縮径部41から底42に向かう部分の横断面(A―A断面)は円形である。
【0067】
前記点aは、キュベットの中心である点Oからキュベット内壁までの距離より短い距離だけ、当該点Oから離れた点である。この点aは、その中心がキュベットの中心Oと一致するように当該キュベット内に配置されたピペットの外壁(図10において2点鎖線で示す)とキュベットの内壁との距離Rに基づいて設定される。具体的に、点aは、点Oとの距離r1が例えば0.7〜0.8Rとなるように設定される。距離r1が0.8Rに設定された場合、ピペットとキュベットとの位置調整が正確である限り、キュベットの中心である点Oから0.8Rだけずれた点aにおいてピペットがキュベット内に挿入されたとしても、当該ピペットの外壁とキュベットの内壁との間には、R−0.8R=0.2Rのクリアランスが確保されるので、ピペットがキュベットの内壁に接触することはない。
【0068】
換言すれば、ピペットとキュベットとの相対位置が0.2R以上ずれていると、点aでピペットを下降させたときに当該ピペットがキュベットの内壁に接触するか、又は、場合によってはキュベットの鍔部41の上面に衝突することになる。ピペットを用いた検体分析装置では、分注時におけるピペットの下降位置が容器の中心から若干ずれたとしても、当該容器内に挿入されている限り、エラーは検出されない。しかし、このように下降位置がずれた状態は、これを放置して分析作業を続けるうちに、ピペットが容器内に挿入されずに当該容器に衝突する等して破損するおそれがあるため、早期にメンテナンスを実行してピペットと容器との位置調整を行うことが好ましい。本実施の形態によれば、ピペットの下降位置がキュベットの中心Oから所定距離だけずれた場合には、点a又は後述する点bでの下降位置においてピペットとキュベットとが接触するため、エラーの検出が可能となる。本実施の形態では、ピペットとキュベットとの相対位置のずれを早期に検出することでピペットの破損や、破損に伴う分析作業の中断を防止することができる。
【0069】
ついでステップS6において、測定装置2の制御部501は、第1試薬分注ユニット27の駆動部141aを駆動させて当該第1試薬分注ユニット27に装着されたピペットを下降させる。このときの下降速度は、衝突によるピペットの破損を防止するため、通常の分析作業における試薬分注時よりも低速で下降させる。具体的に、試薬分注時の下降速度(例えば、320mm/s)の1/4〜1/2程度の速度で下降させる。
【0070】
下降したピペットの先端がキュベットCの内壁に強く接触するか又は当該キュベットCの鍔部40等に衝突すると、第1試薬分注ユニット27の、検知部材173及び接触検出用センサ170からなる接触検知部により当該接触又は衝突が検知される。
【0071】
ついでステップS7において、測定装置2の制御部501は、エラーが検知されたか否かの判断をする。測定装置2の制御部501は、エラーが検知された(YES)と判断する場合、ステップS8に処理を進め、エラーが検知されていない(NO)と判断する場合、ステップS9に処理を進める。前述した検知部材173及び接触検出用センサ170からなる接触検知部からの信号に基づいて、エラーが検知されたか否かの判断が行われる。
【0072】
ステップS8において、測定装置2の制御部501は、エラー検知信号を制御装置4に送信し、エラー検知信号を受信した制御装置4は、表示部4bに装置のメンテナンスを促す旨のメッセージを表示させる。このメッセージには、メンテナンスが必要である部位が、第1試薬分注ユニット27及びキュベットテーブル23であることが含まれる。ユーザーは、このメッセージに従って、サービス会社にメンテナンスの依頼を行う。ただし、ピペットの下降位置を意図的に中心からずらした結果エラーが検知されたものと考えられ、位置ずれはほとんどの場合において許容範囲内である(中心からずらさずに所定位置で下降させた場合、前記接触や衝突が生じない状態である)ので、ステップS1において受信された精度管理用検体の測定開始指示による測定自体は継続して行われる。つまり、メンテナンスは、ステップS1において受信された精度管理用検体の測定開始指示による測定が終了してから行われる。なお、万一、実際の測定時にピペットがキュベットに接触又は衝突すると、前記接触検知部からの検知信号に基づいて、その時点でピペットの移動は停止される。
【0073】
本実施の形態では、第1試薬分注ユニット27に装着されたピペットと及びキュベットテーブル23に配設されたキュベットとの相対位置にずれが生じたことが検出される。この場合、前記相対位置のずれは、第1試薬分注ユニット27及び/又はキュベットテーブル23の駆動部等の異常により生じるので、メンテナンスに際しては、第1試薬分注ユニット27及びキュベットテーブル23の両方を点検する必要がある。
【0074】
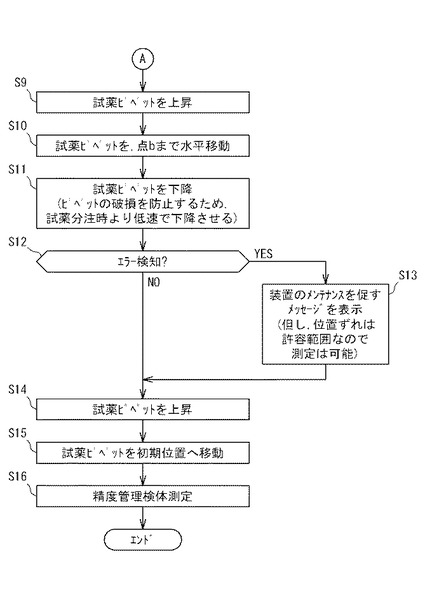
ついでステップS9において、測定装置2の制御部501は、第1試薬分注ユニット27の駆動部141aを駆動させて下降位置にあるピペットを上昇させる。
【0075】
ついでステップS10において、測定装置2の制御部501は、第1試薬分注ユニット27の駆動部141aを駆動させて当該第1試薬分注ユニット27に装着されたピペットを、キュベットの中心からずれた第2の位置(図10の点b)まで水平移動させる。前記点bは、キュベットの中心である点Oからキュベット内壁までの距離より短い距離だけ、当該点Oから離れた点である。前記点bは、また、ピペットの軌跡上において、キュベットの中心から前記点aと逆方向にずれた点である。この点bも、前記点aと同様に、その中心がキュベットの中心Oと一致するように当該キュベット内に配置されたピペットの外壁(図10において2点鎖線で示す)とキュベットの内壁との距離Rに基づいて設定される。具体的に、点bは、点Oとの距離r2が例えば0.7〜0.8Rとなるように設定される。
【0076】
ついでステップS11において、測定装置2の制御部501は、第1試薬分注ユニット27の駆動部141aを駆動させて当該第1試薬分注ユニット27に装着されたピペットを下降させる。このときの下降速度も、衝突によるピペットの破損を防止するため、ステップS6同様に、通常の分析作業における試薬分注時よりも低速で下降させる。
【0077】
ついでステップS12において、測定装置2の制御部501は、エラーが検知されたか否かの判断をする。測定装置2の制御部501は、エラーが検知された(YES)と判断する場合、ステップS13に処理を進め、エラーが検知されていない(NO)と判断する場合、ステップS14に処理を進める。前述した検知部材173及び接触検出用センサ170からなる接触検知部からの信号に基づいて、エラーが検知されたか否かの判断が行われる。
【0078】
ステップS13において、測定装置2の制御部501は、エラー検知信号を制御装置4に送信し、エラー検知信号を受信した制御装置4は、ステップS8と同様にして、表示部4bに装置のメンテナンスを促す旨のメッセージを表示させる。
ついでステップS14において、測定装置2の制御部501は、第1試薬分注ユニット27の駆動部141aを駆動させて下降位置にあるピペットを上昇させる。
【0079】
ついでステップS15において、測定装置2の制御部501は、第1試薬分注ユニット27の駆動部141aを駆動させて当該第1試薬分注ユニット27に装着されたピペットを、初期位置に移動させる。
【0080】
なお、図8〜9に示される位置確認では、例として第1試薬分注ユニット27とキュベットテーブル23との位置確認が終了した後に精度管理用検体の測定が行われているが、実際には、表1に示される組合せのすべてについて位置確認が終了した後に精度管理用検体の測定が行われる。この場合、18種類の組合せについて順に位置確認を行なってもよいし、複数の組合せを並行して行なってもよい。例えば、確認対象が重複していないので、第1試薬分注ユニット27とキュベットテーブル23との位置確認と並行して、第2検体分注ユニット26と搬送機構部6との位置確認を行うことができる。並行して位置確認を行なうことで、位置確認に要する時間を短縮することができる。並行した位置確認は、後述する容器移動部とテーブル等との位置確認(表2参照)でも行なうことができる。
【0081】
<第2実施形態>
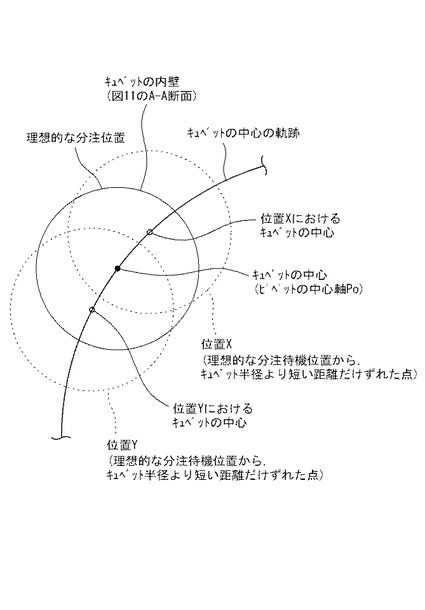
前述した第1実施形態では、ピペットと容器の位置確認を行うために、ピペットを、容器の中心からずれた複数の位置で下降させているが、第2実施形態では、容器の方を複数の停止位置まで移動させ、それぞれの停止位置において、ピペットの先端を、前記容器内に配置させる。この場合、前記複数の停止位置における前記容器の中心が、前記ピペットの中心軸を基準として互いに異なる方向に(互いに逆方向に)位置するように、前記容器が配設されたテーブル等の移動が制御される。
【0082】
図12は、第2実施形態に係る位置確認の説明図である。図12において、実線の円は、理想的な分注位置におけるキュベットの内壁(図11のA―A断面における内壁)を示しており、キュベットの中心とピペットの中心軸Poとが一致している。破線で示される円は、ピペットの中心軸Poを基準として互いに逆方向の位置X又は位置Yを示している。位置X及び位置Yは、実線で示される理想的な分注待機位置から、キュベット半径とピペット半径との差より短い距離だけずれた位置である。より詳細には、その中心がキュベットの中心と一致するように当該キュベット内に配置されたピペットの外壁とキュベットの内壁との距離より短い距離だけずれた位置である。
【0083】
この第2実施形態においても、前記第1実施形態と同様に、ピペットと容器との相対位置のずれが所定量を超えているか否かを確認することができる。
なお、図12で描かれた軌跡は、キュベットの中心の軌跡である。
【0084】
<第3実施形態>
前述した第1実施形態及び第2実施形態では、ピペットと容器の相対位置のずれを確認しているが、第3実施形態では、容器を把持して移動させる容器移動部に把持された容器と、この容器が載置される保持孔との相対位置のずれを確認する。分析に際しては、第1〜第3キャッチャユニットを用いて、キュベットの移動が行われるが、キャッチャユニットに把持されたキュベットの中心と、このキュベットを受け入れる保持孔等の中心とのずれが所定量を超えると、キュベットを保持孔内に配置することができなくなる。従って、このようなずれを前述した第1実施形態と同様に1日の分析作業の開始前に確認することで、キュベットが保持孔内に配置できないといった事態が発生するのを防止することができる。
【0085】
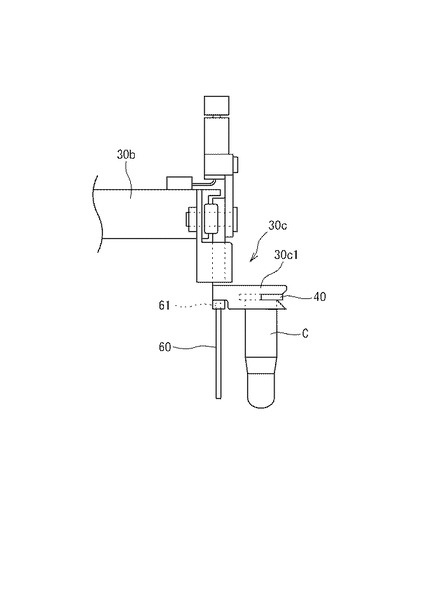
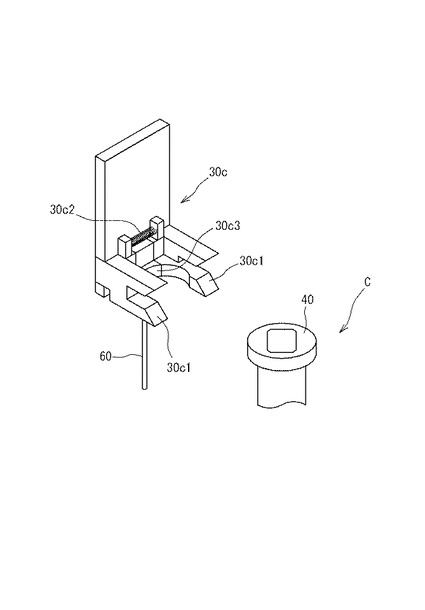
図13は、第3実施形態に係る検体分析装置における第1キャッチャユニット30の把持部30cの側面説明図であり、図14は同斜視説明図である。図13〜14に示されるように、第1キャッチャユニット30は、アーム30bの先端部に設けられた把持部30cによってキュベットCを挟み込んで把持することが可能である。また、第1キャッチャユニット30は、キュベットCを把持した状態でアーム30bを回動させることにより、把持したキュベットCを加温テーブル24等に供給することができる。
【0086】
把持部30cは、キュベットCの鍔部40を水平方向から挟持するための二股形状を有する一対の挟持部材30c1と、この一対の挟持部材30c1を互いに近づく方向に付勢する圧縮コイルバネ30c2とを有している。キュベットCの鍔部40は、互いに近づく方向に付勢された挟持部材30c1の二股形状部分に挟持されることにより、把持部30cに把持される。
【0087】
本実施の形態における第1キャッチャユニット30では、前記一対の挟持部材30c1間の部材30c3の下面に位置検査用の金属製の棒状体60を装着することができる穴61が形成されている。この穴61は、第1キャッチャユニット30の把持部30を正面から見て(図13において右側から見て)その中心位置に形成されている。棒状体60の端部は前記穴61内に圧入可能な太さに選定されている。なお、穴61の内周面に雌ねじを形成し、棒状体60の端部に形成した雄ねじを前記雌ねじに螺合させるようにしてもよい。
【0088】
また、第1キャッチャユニット30は静電容量型の接触検知部を備えており、加温テーブル24も金属で作製されている。したがって、金属製の棒状体60と加温テーブル24の保持孔内壁との接触を前記静電容量型の接触検知部で検知することができる。
【0089】
本実施の形態においても、前述した第1実施形態と同様に、金属製の棒状体60を、保持孔の中心からずれた複数の位置であって当該中心からの方向が互いに異なる複数の位置で前記保持孔内に配置させることにより、容器を把持して移動させる容器移動部に把持された容器と、この容器が載置される保持孔との相対位置のずれを確認することができる。ここでは、加温テーブル24を駆動することによって、保持孔の中心からずれた複数の位置であって当該中心からの方向が互いに異なる複数の位置で前記保持孔内に配置させる。ただし、一対の挟持部材30c1により挟持される容器の中心位置と棒状体60の中心軸とは前後(図13において左右方向)にずれているので、位置確認する際には、第1キャッチャユニット30は、容器を把持するときよりも一定距離だけ前進してから位置確認動作を行う必要がある。
【0090】
上記の説明では、加温テーブル24を駆動することによって、保持孔の中心からずれた複数の位置であって当該中心からの方向が互いに異なる複数の位置で前記保持孔内に配置させているが、前記第1キャッチャユニット30を駆動することによって、保持孔の中心からずれた複数の位置であって当該中心からの方向が互いに異なる複数の位置で前記保持孔内に配置させてもよい。また、前述した検体分析装置1では、以下の表2に示されるように、容器を把持する容器移動部と当該容器が配設されるテーブル等との組合せが複数存在しており、各組合せにおいて位置確認が行われる。
【0091】
【表2】
【0092】
〔その他の変形例〕
なお、本発明は前述した実施の形態に限定されるものではなく、特許請求の範囲内において種々の変更が可能である。例えば、前述した実施の形態では、精度管理用検体の測定時に位置確認を実行しているが、患者検体の測定時に実行してもよいし、位置確認開始ボタンを表示部に表示させ、ユーザーがこのボタンを押下したときに実行してもよい。
【0093】
また、前述した実施の形態では、位置確認の結果を表示部に表示しているが、表示部に表示せず、又は、表示部に表示させるとともに、制御装置の送信部からネットワークを介してサービス(メンテナンス)会社のサーバに送信してもよい。これにより、メンテナンス会社では、予想される必要な部品及び技術者の手配を効率的に行うことができる。
【0094】
また、前述した実施の形態では、ピペットをキュベットテーブルの保持孔に保持されたキュベット内に挿入して位置確認を行っているが、ピペットを、当該キュベットを保持する保持孔(開口)に挿入して位置確認を行なってもよい。また、キュベットを保持する保持孔に代えて、位置確認用の開口をキュベットテーブル等のテーブル上に設けてもよい。
【0095】
また、前述した実施の形態では、ピペットを水平方向にずらした後に当該ピペットを下降させて位置確認を行なっているが、まずピペットをキュベットの中心位置で下降させて当該キュベット内に挿入し、その後、ピペットを水平方向にずらすことにより、位置確認を行なってもよい。
【0096】
また、前述した実施の形態では、ピペットとキュベットとの接触を、検知部材173及び接触検出用センサ170からなる接触検知部を用いて光学的に検知しているが、容器搬送部及びピペットを金属で作製する場合には、静電容量式の接触検知部を採用することもできる。検知部材173及び接触検出用センサ170からなる接触検知部の場合は、ピペットの軸方向の移動を検知する機構であるため、ピペットの外面とキュベットの内壁とが接触するだけでピペットの軸方向の移動がない場合は検知されない。この点、静電容量式の接触検知部は、ピペットの外面とキュベットの内壁とが接触するだけで検知可能であるので、前述した、ピペット下降後に水平移動させる態様における接触検知部として効果的である。
【0097】
また、前述した実施の形態では、位置確認の結果エラーが検出された場合に、エラーメッセージを表示部に表示するものの測定の続行を許可しているが、精度管理用検体の測定に入る前に、ピペットを空キュベットの中心(意図的に中心からずらした位置ではなく、ピペットの所定の分注位置)で下降させる工程を実行することもできる。この場合、中心位置でピペットが挿入可能であることを確認することで、測定時にピペットがキュベットに接触又は衝突して作業が中断される事態を避けることができる。また、測定時に作業が中断してそれまでに使用した試薬や検体が無駄になることを防ぐことが出来る。
【0098】
また、前述した実施の形態では、ピペットが回動するアームの端部に取り付けられており、円形の軌跡に沿って水平面内を移動しているが、ピペットが互いに直交するX軸及びY軸に沿って水平面内を移動する機構においても、本発明を適用することができる。
【0099】
また、前述した実施の形態では、血液凝固測定装置に本発明を適用しているが、免疫分析装置、生化学測定装置等の他の臨床検体分析装置にも本発明を適用することができる。
【符号の説明】
【0100】
1 検体分析装置
2 測定装置
4 制御装置
4a 制御部
4b 表示部
4c キーボード
5 測定機構部
6 搬送機構部
13 検体容器
14 検体ラック
21 第1試薬テーブル
22 第2試薬テーブル
23 キュベットテーブル
24 加温テーブル
25 第1検体分注ユニット
26 第2検体分注ユニット
27 第1試薬分注ユニット
27a 軸
27b アーム
28 第2試薬分注ユニット
29 第3試薬分注ユニット
30 第1キャッチャユニット
31 第2キャッチャユニット
32 第3キャッチャユニット
34 キュベット搬送機
37 検出ユニット
P ピペット
C キュベット(容器)
【技術分野】
【0001】
本発明は分析装置及び位置確認方法に関する。
【背景技術】
【0002】
従来、試薬搬送テーブル、キュベット搬送テーブル、検体サンプラ等の搬送ユニットによって搬送されるキュベット等の容器に収容された試薬、検体、それらの混合液等の液体をピペットを介して吸引又は吐出し、検体を分析する検体分析装置が知られている。
【0003】
このような検体分析装置を長期間使用していると、ピペットを備えた試薬分注部等を駆動する機構の劣化等(駆動ベルトの伸び等)により当該ピペットの停止位置が徐々に所定の停止位置からずれてくる場合がある。このような状態でピペットを下降させ、ピペットが試薬容器等に接触してしまった場合に、なお下降動作を継続すると、ピペットや試薬容器を破損するおそれがある。そこで、センサによってピペットと試薬容器の接触を検出し、接触を検出した場合には分注動作を停止させる分析装置が知られている(例えば特許文献1)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平1−221673号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら上記のような分析装置では、ピペットと容器の位置関係に多少のずれが生じても、ピペットが容器に接触するほどのずれでなければ分注動作を継続して行なうことが可能である。そのため、検体の測定中に実際にピペットが障害物に接触して分注動作が中断されるまではピペットと容器との間の位置関係にずれが生じていることが判明しないという問題があった。
【0006】
本発明は、このような事情に鑑みてなされたものであり、容器とピペットとの相対位置にずれが生じているか否かを容易に確認することができる分析装置及び位置確認方法を提供することを目的としている。
【課題を解決するための手段】
【0007】
(1)本発明の第1の観点に係る分析装置は、液体を収容可能な容器を保持する容器保持部と、
ピペットを備えており、当該ピペットを下降させて、前記容器保持部によって保持された容器内に収容された液体を吸引する、及び/又は、当該容器内に液体を吐出する液体分注部と、
前記容器保持部に保持された容器又は前記容器保持部と前記ピペットとの接触を検知する接触検知部と、
前記ピペットの先端を、前記容器又は前記容器保持部に設けられた開口内の水平方向における複数の位置に配置させるよう前記液体分注部を制御し、前記接触検知部により前記容器又は前記容器保持部と前記ピペットとの接触が検知されたか否かを判定する位置確認処理を実行する制御部と
を備えたことを特徴としている。
【0008】
本発明の分析装置では、位置調整確認処理によって、容器搬送部に保持された容器又は当該容器搬送部に設けられた開口を所定の停止位置まで移動させるとともに、ピペットの先端を、前記容器又は開口の中心からずれた複数の位置に配置させる。この複数の位置は、容器又は開口の中心からの方向が互いに異なる複数の位置である。このようにピペットの先端を容器又は開口の中心から意図的にずらして配置させて、当該ピペットの先端と容器又は開口の内面等との接触が検知されたか否かを判定することで、分析装置は、容器搬送部と液体分注部の位置調整状態が正常であるか否かを確認することができる。換言すれば、容器搬送部と液体分注部との間に相対的な位置ずれが生じているか否かを確認することができる。そして、位置ずれが確認された場合には、容器搬送部及び液体分注部の少なくとも一方の移動動作に異常があるとして、適当なタイミングで当該容器搬送部及び液体分注部の駆動機構等のメンテナンスを行うことができる。早めにメンテナンスを行うことで、ピペットが容器に衝突して破損する等のトラブルを回避することができる。
【0009】
(2)前記(1)の分析装置において、前記容器保持部は、保持した容器を搬送する容器搬送部であり、
前記制御部は、前記位置確認処理において、前記開口が所定の停止位置に位置するよう前記容器搬送部を制御するとともに、前記ピペットの先端を、前記開口内の水平方向における複数の位置に配置させるよう前記液体分注部を制御してもよい。
【0010】
(3)前記(1)又は(2)の分析装置において、前記複数の位置は、前記開口の中心から水平方向にずれた複数の位置であって当該中心からの方向が互いに異なる複数の位置であってもよい。
【0011】
(4)前記(3)の分析装置において、前記位置確認処理では、前記開口の中心から互いに逆方向にずれた複数の位置で、前記ピペットの先端を当該開口内に配置させてもよい。
【0012】
(5)前記(3)又は(4)の分析装置において、前記位置確認処理では、前記ピペットを、前記開口の中心から水平方向にずれた位置から下降させることにより、当該ピペットの先端を前記開口内に配置させてもよい。
【0013】
(6)前記(5)の分析装置において、前記位置確認処理では、液体の吸引又は吐出時におけるピペットの下降速度よりも低速で当該ピペットを下降させて前記ピペットの先端を前記開口内に配置させてもよい。
【0014】
(7)前記(1)〜(6)の分析装置において、前記液体の測定開始指示を受け付ける測定開始指示受付手段をさらに備えており、
前記制御部は、前記測定開始指示受付手段が前記液体の測定開始指示を受け付けると、前記位置確認処理を実行してもよい。
【0015】
(8)前記(7)の分析装置において、前記制御部は、前記測定開始指示受付手段が前記液体の測定開始指示を受け付けると、前記位置確認処理により前記接触検知部が前記容器又は容器保持部と前記ピペットとの接触を検知したとしても、前記液体の測定を続行してもよい。
【0016】
(9)前記(1)〜(8)の分析装置において、前記容器搬送部及びピペットが金属で作製されており、
前記接触検知部は、前記ピペットの前記容器保持部との接触を検知する静電容量式の接触検知部であってもよい。
【0017】
(10)前記(3)、(4)、及び(7)〜(9)の分析装置において、前記位置確認処理では、前記ピペットを前記開口内に下降させた後に当該ピペットの先端を、前記開口の中心から水平方向にずれた複数の位置に配置させてもよい。
【0018】
(11)前記(1)〜(10)の分析装置において、前記接触検知部による検知結果を表示する表示部をさらに備えていてもよい。
【0019】
(12)前記(1)〜(11)の分析装置において、前記接触検知部による検知結果を外部に送信可能な送信部をさらに備えていてもよい。
【0020】
(13)前記(7)〜(12)の分析装置において、前記液体は、精度管理用検体であり、
前記測定開始指示受付手段は、前記精度管理用検体の測定開始指示を受け付ける精度管理開始指示受付手段であり、
前記制御部は、前記精度管理開始指示受付手段が精度管理用検体の測定開始指示を受け付けると、前記位置確認処理を実行してもよい。
【0021】
(14)本発明の第2の観点に係る分析装置は、液体を収容可能な容器を保持し、保持した容器を搬送する容器搬送部と、
ピペットを備えており、当該ピペットを下降させて、前記容器搬送部によって搬送された容器内に収容された液体を吸引する、及び/又は、当該容器内に液体を吐出する液体分注部と、
前記容器搬送部に保持された容器又は前記容器搬送部と前記ピペットとの接触を検知する接触検知部と、
前記容器又は前記容器搬送部に設けられた開口が水平方向における複数の停止位置に位置するよう前記容器搬送部を制御するとともに、それぞれの停止位置において、前記ピペットの先端を、前記開口内に配置させるよう前記液体分注部を制御し、前記接触検知部により前記容器又は前記容器搬送部と前記ピペットとの接触が検知されたか否かを判定する位置確認処理を実行する制御部と
を備えたことを特徴としている。
【0022】
(15)本発明の第3の観点に係る分析装置は、液体を収容可能な容器を保持する容器保持部と、
前記容器を把持する把持部を備えており、当該把持部により把持された容器を前記容器保持部に移動させることができ、さらに位置検査用の棒状体を実質的に垂直な状態で装着することができる容器移動部と、
前記容器保持部に保持された容器又は前記容器保持部と前記容器移動部に装着された棒状体との接触を検知する接触検知部と、
前記棒状体の先端を、前記容器又は前記容器保持部に設けられた開口内の水平方向における複数の位置に配置させるよう前記容器移動部を制御し、前記接触検知部により前記容器又は前記容器保持部と前記棒状体との接触が検知されたか否かを判定する位置確認処理を実行する制御部と
を備えたことを特徴としている。
【0023】
(16)本発明の位置確認方法は、液体を収容可能な容器を保持する容器保持部と、前記容器保持部によって保持された容器内に収容された液体を吸引する、及び/又は、当該容器内に液体を吐出するピペットと、を有する分析装置における、ピペットの位置確認方法であって、
ピペットの先端を、前記容器又は前記容器保持部に設けられた開口内の水平方向における複数の位置に配置させる配置ステップと、
前記配置ステップの実行中に、前記容器保持部に保持された容器又は前記容器保持部と前記ピペットとの接触を検知した場合に、通知を出力する出力ステップと、を有することを特徴としている。
【0024】
(17)前記(16)の位置確認方法において、前記容器保持部は水平方向に移動可能であり、前記ピペットは水平方向及び上下方向に移動可能であってもよい。
【発明の効果】
【0025】
本発明の分析装置及び位置確認方法によれば、容器に対するピペットの相対位置にずれが生じているか否かを容易に確認することができる。
【図面の簡単な説明】
【0026】
【図1】本発明の分析装置の一実施の形態である検体分析装置の全体構成を示す斜視説明図である。
【図2】図1に示される検体分析装置の測定装置の概略構成を示す平面説明図である。
【図3】第1試薬分注ユニットの構成を概略的に示す側面図である。
【図4】第1試薬分注ユニットにおけるアーム及び接触検出用センサを示す斜視説明図である。
【図5】検体分析装置の測定装置の構成を示すブロック図である。
【図6】測定装置の制御部の構成を示すブロック図である。
【図7】制御装置の構成を示すブロック図である。
【図8】位置確認の一例のフローチャート(前半部)である。
【図9】位置確認の一例のフローチャート(後半部)である。
【図10】位置確認の説明図である。
【図11】キュベットの一例の斜視説明図である。
【図12】他の実施の形態に係る位置確認の説明図である。
【図13】さらに他の実施の形態におけるキャッチャユニットの側面説明図である。
【図14】さらに他の実施の形態におけるキャッチャユニットの斜視説明図である。
【発明を実施するための形態】
【0027】
以下、添付図面を参照しつつ、本発明の分析装置の実施の形態を詳細に説明する。
<第1実施形態>
図1は、第1実施形態に係る検体分析装置1の全体構成を示す斜視説明図であり、図2は、検体分析装置1の測定装置の概略構成を示す平面説明図である。
【0028】
検体分析装置1は、血液の凝固・線溶機能に関連する特定の物質の量や活性の度合いを光学的に測定して分析するための装置であり、検体としては血漿を用いる。本実施の形態に係る検体分析装置1では、凝固時間法、合成基質法及び免疫比濁法を用いて検体の光学的な測定を行っている。本実施の形態で用いる凝固時間法は、検体が凝固する過程を透過光の変化として検出する測定方法である。そして、測定項目としては、PT(プロトロンビン時間)、APTT(活性化部分トロンボプラスチン時間)やFbg(フィブリノーゲン量)等がある。また、合成基質法の測定項目としてはATIII等があり、免疫比濁法の測定項目としてはDダイマー、FDP等がある。
【0029】
検体分析装置1は、図1及び図2に示されるように、測定装置2と、この測定装置2に電気的に接続された制御装置4とで構成されている。また、測定装置2は、測定機構部5と、測定機構部5の前面側に配置された搬送機構部6とで構成され、測定機構部5は、筐体5A及びカバー体5Bによって覆われている。カバー体5Bは、筐体5Aの前上部左側に開閉可能に取り付けられている。そして、カバー体5Bを開くことによって測定機構部5の前部側を外部に露出させることができる。
【0030】
〔搬送機構部の構成〕
搬送機構部6は、図2に示されるように、測定機構部5に検体を供給するために、検体を収容した複数本の検体容器13が保持された検体ラック14を搬送路6a上で左右方向に搬送し、検体容器13を所定の検体吸引位置15a,15bに位置づける機能を有している。また、搬送機構部6は、未処理の検体を収容した検体容器13が収納された検体ラック14をセットするためのラックセット領域6bと、処理済みの検体を収容した検体容器13が収納された検体ラック14を収容するためのラック収容領域6cとを搬送路6aの両端に有している。また、搬送機構部6は、検体容器13に貼付されたバーコードを読み取るための検体バーコードリーダ16を備えている。
【0031】
〔測定機構部の構成〕
測定機構部5は、搬送機構部6から供給された検体に対して光学的な測定を行うことにより、供給された検体に関する光学的な情報を取得することができるように構成されている。本実施の形態では、搬送機構部6の検体ラック14に載置された検体容器13から測定機構部5のキュベット内に分注された検体に対して光学的な測定が行われる。
【0032】
測定機構部5は、第1試薬テーブル21、第2試薬テーブル22、キュベットテーブル23、加温テーブル24、第1検体分注ユニット25、第2検体分注ユニット26、第1試薬分注ユニット27、第2試薬分注ユニット28、第3試薬分注ユニット29、第1キャッチャユニット30、第2キャッチャユニット31、第3キャッチャユニット32、試薬バーコードリーダ33、キュベット搬送機34、希釈液搬送機35、ピペット洗浄器36a〜36e、及び検出ユニット37等を備えている。
【0033】
第1試薬テーブル21、第2試薬テーブル22、キュベットテーブル23及び加温テーブル24は円形状のテーブルであり、それぞれステッピングモータ等の駆動部によって時計回り及び反時計回りの両方に独立して回転駆動される。第1試薬テーブル21は試薬テーブル駆動部97により駆動され、第2試薬テーブル22は試薬テーブル駆動部98により駆動される。キュベットテーブル23はキュベットテーブル駆動部142により駆動される。また、加温テーブル24は加温テーブル駆動部143により駆動される。
【0034】
また、第1試薬テーブル21及び第2試薬テーブル22は、試薬庫40(試薬保冷部)内に配置され、この第1試薬テーブル21及び第2試薬テーブル22上に試薬が収容された試薬容器を保持する第1試薬容器ラック310及び第2試薬容器ラック320がセットされる。
【0035】
図3は、第1試薬分注ユニット27の構成を概略的に示す側面図である。
第1試薬分注ユニット27は、アーム27bを、軸27aを中心に回動させるとともに上下方向に移動させることができる駆動部141a(141)を備えている。アーム27bの先端部には、検体等の吸引及び吐出を行うためのピペットPが取り付けられている。
【0036】
駆動部141aは、回転用モータ161と、昇降用モータ162と、回転用モータ161及び昇降用モータ162の動力を軸27aに伝達する伝達機構163とを備えている。伝達機構163は、例えば回転用モータ161の回転動力を減速して軸27aに伝達するベルト伝達機構やギヤ機構等、昇降用モータ162の回転動力を上下方向の直線動力に変換して軸27aに伝達するベルト伝達機構やラック・ピニオン機構等からなる。回転用モータ161及び昇降用モータ162は、ステッピングモータからなっており、その回転パルスはエンコーダ(図示せず)によって検出される。
【0037】
図4は、第1試薬検体分注ユニット27におけるアーム27b及び接触検出用センサを示す斜視説明図である。図4には、上部カバー27c(2点鎖線で示す)が取り外されることによって内部が露出したアーム27bが示されている。ピペットPは、アーム27bに上下方向に移動可能に支持されるとともに、下方への移動が所定に規制されている。また、ピペットPは、圧縮コイルバネからなる付勢部材171によって下方へ付勢されている。アーム27bには、ピペットPとともに上下方向に移動可能な台座172が設けられ、この台座172上に検知部材173が取り付けられている。アーム27bには回路基板174が立設され、この回路基板174に接触検出用センサ170が取り付けられている。
【0038】
接触検出用センサ170は、投光部と受光部とを有する透過型センサからなる。検知部材173には、接触検出用センサ170の投受光部の間に配置される遮光板173aが設けられている。遮光板173aは、正常時に接触検出用センサ170を遮光し、当該接触検出用センサ170をオフ状態とする。ピペットPが下降して容器の内周面と強く接触したり、当該容器の開口周縁部に衝突したりすると、アーム27bに対してピペットPが上昇し、台座172を介して遮光板173aも上昇するため、接触検出用センサ170の遮光が解除される。これにより接触検出用センサ170がオンとなった場合に、前記第1試薬分注ユニット25等の機構の動作制御を行う制御部501により、ピペットPが容器等に接触ないし衝突したことが検知される。
【0039】
第1検体分注ユニット25、第2検体分注ユニット26、第2試薬分注ユニット28及び第3試薬分注ユニット29についても、第1試薬分注ユニット27と同様の構成を備えている。すなわち、これらユニット25、26、28,29は、それぞれアーム及びピペットを有し、アームは、駆動部によって回転駆動、昇降駆動される。前記ピペットを用いて検体や試薬が吸引・吐出される。第1検体分注ユニット25は、駆動部141bにより駆動され、第2検体分注ユニット26は、駆動部141cにより駆動される。第2試薬分注ユニット28は、駆動部141dにより駆動され、第3試薬分注ユニット29は、駆動部141eにより駆動される。
【0040】
第1キャッチャユニット30は、支持部30aと、この支持部30aによって支持される伸縮可能なアーム30bと、アーム30bの先端部に設けられた把持部30cとで構成されている。アーム30bは、ステッピングモータ等で構成された駆動部144aによって回転駆動され、把持部30cはキュベットを把持する。第2キャッチャユニット31についても、第1キャッチャユニット30と同様の構成となっており、ステッピングモータ等で構成された駆動部144bによって駆動される。
【0041】
第3キャッチャユニット32は、支持部32aと、この支持部32aによって支持される伸縮可能なアーム32bと、アーム32bの先端の把持部32cとで構成されている。支持部32aは、左右方向に配置されたレール32dに沿って駆動部144cによって駆動される。把持部32cはキュベットを把持することができる。
【0042】
試薬バーコードリーダ33は、試薬庫40内に収納された試薬容器や、この試薬容器を保持する試薬容器ラック310,320に貼付されたバーコードを読み取る。試薬バーコードリーダ33は、試薬庫40の外側に配置されており、試薬庫40に形成され且つシャッタにより開閉されるスリット(図示せず)を介して試薬庫40内のバーコードを読み取ることが可能となっている。
【0043】
キュベット搬送機34と、希釈液搬送機35は、それぞれレール34a,35a上を左右方向に駆動する。キュベット搬送機34と希釈液搬送機35には、それぞれ、キュベット及び希釈液容器を保持するための保持孔が形成されている。
【0044】
測定機構部5には、キュベット口49、廃棄口50,51が設けられている。キュベット口49には、常に新しいキュベットが供給される。新しいキュベットは、第1キャッチャユニット30と、第2キャッチャユニット31により、キュベット搬送機34の保持孔とキュベットテーブル23の保持孔にセットされる。廃棄口50,51は、分析が終了し不要となったキュベットを廃棄するための孔である。検体分析装置1の筐体5A内には、廃棄されたキュベットを蓄積するキュベット廃棄部(図示せず)が設けられている。
【0045】
ピペット洗浄器36a〜36eは、それぞれ第1、第2検体分注ユニット25,26、及び第1〜第3試薬分注ユニット27〜29のピペットを洗浄するために用いられる。ピペット洗浄器36a〜36eには、ピペットが挿入される孔が上下方向に形成され、この孔に供給された洗浄液によってピペットの外面を洗浄する。
【0046】
検出ユニット37は、上面にキュベットを収容する複数個(図示例では20個)の保持孔37aが形成され、下面裏側に検出部(図示略)が配置されている。保持孔37aにキュベットがセットされると、検出部によってキュベット中の測定試料に含まれる成分を反映した光学的情報が検出される。
【0047】
図5は、検体分析装置1の測定装置の構成を示すブロック図であり、図6は、測定装置の制御部の構成を示すブロック図である。図5に示されるように、第1,第2試薬テーブル21,22、キュベットテーブル23、加温テーブル24、第1,第2検体分注ユニット25,26、第1〜第3試薬分注ユニット27〜29、第1〜第3キャッチャユニット30〜32、キュベット搬送機34、希釈液搬送機35、ピペット洗浄器36a〜36e、及び検出ユニット37の各駆動部97,98,141〜145や、試薬バーコードリーダ33、検体バーコードリーダ16等は、測定装置2の制御部501に電気的に接続されており、この制御部501によって動作制御される。検出ユニット37は、取得した光学的情報を制御部501に対して送信することができるように構成されている。分注ユニット駆動部は、駆動部141a、141b、141c、141d及び141eを含む。また、キャッチャユニット駆動部は、駆動部144a、144b及び144cを含む。
【0048】
また、図6に示されるように、制御部501は、CPU501aとROM501bと、RAM501cと、通信インタフェース501dとから主として構成されている。CPU501aは、ROM501bに記憶されているコンピュータプログラム及びRAM501cに読み出したコンピュータプログラムを実行することができる。ROM501bは、CPUaに実行させるためのコンピュータプログラム及び当該コンピュータプログラムの実行に用いるデータ等を記憶している。RAM501cは、ROM501bに記憶しているコンピュータプログラム等の読み出しに用いられ、このコンピュータプログラムを実行するときの、CPU501aの作業領域として利用される。
【0049】
通信インタフェース501dは、制御装置4に接続されており、検体の光学的情報を制御装置4に送信するとともに、制御装置4の制御部4aからの信号を受信するための機能を有している。また、通信インタフェース501dは、搬送機構部6及び測定機構部5の各部を駆動するためのCPU501aからの指令を送信するための機能を有する。
【0050】
〔制御装置の構成〕
制御装置4は、パーソナルコンピュータ401(PC)等からなり、図1に示されるように、制御部4aと、表示部4bと、情報を入力するためのキーボード4cとを含んでいる。制御部4aは、測定機構部5の制御部501に当該測定機構部5の動作開始信号を送信するとともに、測定機構部5で得られた検体の光学的な情報を分析するための機能を有している。また、表示部4bは、検体中に存在する干渉物質(ヘモグロビン、乳び(脂質)およびビリルビン)に関する情報と、制御部4aで得られた分析結果とを表示するために設けられている。
【0051】
図7は、制御装置4の構成を示すブロック図である。制御部4aは、CPU401aと、ROM401bと、RAM401cと、ハードディスク401dと、読出装置401eと、入出力インタフェース401fと、通信インタフェース401gと、画像出力インタフェース401hとから主として構成されている。CPU401a、ROM401b、RAM401c、ハードディスク401d、読出装置401e、入出力インタフェース401f、通信インタフェース401g、および画像出力インタフェース401hは、バス401iによって接続されている。
【0052】
〔測定装置の動作の概要〕
次に、測定装置2における動作の概要について説明する。まず、図2に示されるように、検体容器13を収容した検体ラック14を搬送機構部6のラックセット領域6bにセットすると、この検体ラック14は、ラックセット領域6bにおいて後端(図中上側)まで送られた後、搬送路6a上を左方向に搬送される。そして、検体容器13に貼付されたバーコードラベルが検体バーコードリーダ16によって読み取られ、続いて、検体容器13が所定の検体吸引位置15aに位置づけられる。なお、検体の吸引が全て終了した検体ラック14は、ラック収容領域6cに搬送される。
【0053】
第1検体分注ユニット25は、搬送機構部6によって所定の検体吸引位置15aに位置づけられた検体容器13から検体を吸引する。第1検体分注ユニット25によって吸引された検体は、キュベットテーブル23の前部の検体吐出位置19aに位置づけられたキュベット保持孔55にセットされたキュベットに吐出される。
【0054】
第2検体分注ユニット26は、キュベットテーブル23の前部の検体吸引位置19bにあるキュベット保持孔55にセットされたキュベットに収容されている検体、又は、搬送機構部6によって所定の検体吸引位置15bに位置づけられた検体容器13の検体を吸引する。第2検体分注ユニット26によって吸引された検体は、キュベット搬送機34にセットされたキュベットに吐出される。なお、第2検体分注ユニット26は、希釈液搬送機35にセットされた希釈液を吸入することができる。この場合、第2検体分注ユニット26は、検体の吸引前に希釈液吸引位置20にて希釈液を吸引した後、検体吸引位置15bにて検体を吸引する。
【0055】
第1検体分注ユニット25及び第2検体分注ユニット26は、分注作業が終わると、それぞれピペットがピペット洗浄器36a,36bの孔に挿入され、この孔に供給された洗浄液によって洗浄される。
【0056】
キュベット搬送機34は、収容したキュベットに検体が吐出されると、所定のタイミングにて、レール34a上を右方向に駆動される。続いて、第1キャッチャユニット30によりキュベット搬送機34にセットされた検体を収容しているキュベットが把持され、加温テーブル24のキュベット保持孔24aにセットされる。
【0057】
続いて、第2キャッチャユニット31は、保持孔24aにセットされた検体を収容しているキュベットを把持し、ピペット洗浄器36cの真上まで移動させる。ここで、第1試薬分注ユニット27は、第1試薬テーブル21又は第2試薬テーブル22に配置されている所定の試薬容器内の試薬を吸引し、第2キャッチャユニット31に把持されているキュベットに試薬を吐出する。第2キャッチャユニット31は、試薬が吐出されたキュベットを攪拌し、加温テーブル24のキュベット保持孔24aにセットする。
【0058】
加温テーブル24のキュベット保持孔24aに保持されているキュベットは、第3キャッチャユニット32により把持され、ピペット洗浄器36dの真上領域又はピペット洗浄器36eの真上領域に位置づけられる。ここで、第2試薬分注ユニット28と第3試薬分注ユニット29は、第1試薬テーブル21又は第2試薬テーブル22に配置されている試薬容器から試薬を吸引し、第3キャッチャユニット32により把持されているキュベットに試薬を吐出する。第3キャッチャユニット32は、試薬が吐出されたキュベットを検出ユニット37の保持孔37aにセットする。その後、検出ユニット37においてキュベットに収容された測定試料から光学的情報が検出される。
【0059】
第1〜第3試薬分注ユニット27〜29は、分注作業が終了すると、それぞれのピペットがピペット洗浄器36c〜36eの孔に挿入され、異なる試薬の分注毎に洗浄される。
検出ユニット37による検出が終了し不要となったキュベットは、第3キャッチャユニット32によって把持され、廃棄口50に廃棄される。キュベットテーブル23のキュベット保持孔55に保持されているキュベットについても、分析が終了して不要になると、キュベットテーブル23の回転によって第2キャッチャユニット31に近い場所に位置づけられる。第2キャッチャユニット31は、キュベット保持孔55に保持されている不要となったキュベットを把持し、廃棄口51に廃棄する。
【0060】
〔位置ずれの確認〕
本実施の形態に係る検体分析装置1では、例えば1日の分析作業が開始される前に行われる精度管理用検体の測定に先立って、ピペットと容器であるキュベットの相対位置にずれが生じているか否かの確認(位置確認)が行われる。本実施の形態において、位置確認において検出の有無が判定されるエラー(後述するステップS7及びステップS12)とは、ピペットがキュベットの内壁に接触すること及びキュベットの鍔部41の上面に衝突すること等の接触の検出を示す。
【0061】
図8〜9は、かかる位置確認の一例(ステップS2〜ステップS15)を含む精度管理検体の測定のフローチャートである。前半部を示す図8と後半部を示す図9は、A点でつながっている。この例では、便宜的に第1試薬分注ユニット27とキュベットテーブル23との位置確認を行っている例を挙げているが、本実施の形態に係る検体分析装置1では、以下の表1に示されるように、ピペットと容器を搬送する容器搬送部との組合せが複数存在しており、他の組合せにおいても図8〜9に示されるフローと同様にして位置確認が行われる。表1において、例えば第1試薬分注ユニット27に装着されたピペットは、キュベットテーブル23、第1試薬テーブル21、第2試薬テーブル22及び加温テーブル24に配置された容器内の液体を吸引するか、又は当該容器内に液体を吐出する。従って、第1試薬分注ユニット27に装着されたピペットと、キュベットテーブル23等の容器搬送部の所定位置(液体の吸引・吐出位置)の容器との間で位置確認が行われる必要がある。
【0062】
【表1】
【0063】
図8に戻って、位置確認の(ステップS2〜ステップS15)を含む精度管理検体の測定の説明を行う。精度管理用検体の測定開始指示は、表示部4bに表示された精度管理検体の測定を行うための精度管理用画面において、ユーザーがキーボード4cを操作又は表示部4bの画面をタッチすることにより行うことができる。これにより、制御装置4の制御部4aは、測定装置2の制御部501に測定開始信号を送信する。まず、測定装置2が起動された後、ステップS1において、測定装置2の制御部501は、制御装置4からの、精度管理用検体の測定開始指示が受信されたか否かを判断する。制御部501は、測定開始指示が受信された(YES)と判断すると、ステップS2に処理を進める。
【0064】
ステップS2において、測定装置2の制御部501は、位置確認に用いる空のキュベット(容器)がキュベットテーブル23に存在しているか否かを判断する。この判断は、例えばキュベットが配置される保持孔に配設された反射型センサからの信号に基づいて行うことができる。制御部501は、空のキュベットがキュベットテーブル23に存在している(YES)と判断した場合には、ステップS4に処理を進め、空のキュベットがキュベットテーブル23に存在していない(NO)と判断した場合には、ステップS3に処理を進める。
【0065】
ステップS3において、測定装置2の制御部501は、駆動部144bにより第2キャッチャユニット31を駆動させて、キュベット口49に供給された空のキュベットをキュベットテーブル23の所定位置に移動させる。
ステップS4において、測定装置2の制御部501は、キュベットテーブル駆動部142を駆動させてキュベットテーブル23に配設された空のキュベットを所定の停止位置、すなわち第1試薬分注ユニット27に装着されたピペットによる分注待機位置まで移動させる。この空のキュベットの移動と並行して、又はキュベットの移動に続いて、測定装置2の制御部501は、第1試薬分注ユニット27の駆動部141aを駆動させて当該第1試薬分注ユニット27に装着されたピペットを所定の待機位置に移動させる。
【0066】
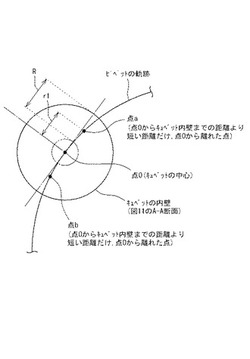
ステップS5において、測定装置2の制御部501は、第1試薬分注ユニット27の駆動部141aを駆動させて当該第1試薬分注ユニット27に装着されたピペットを、キュベットの中心からずれた第1の位置(図10の点a)まで水平移動させる。図10は、本実施の形態における位置確認を説明する図であり、ピペットの軌跡及びキュベットの内壁を模式的に示している。キュベットCは、図11に示されるように、一端側が開放された有底円筒体からなっており、開放された一端側に鍔部40が形成されている。キュベットCの長手方向中央付近には、縮径部41が形成されており、この縮径部41から底42に向かう部分の横断面(A―A断面)は円形である。
【0067】
前記点aは、キュベットの中心である点Oからキュベット内壁までの距離より短い距離だけ、当該点Oから離れた点である。この点aは、その中心がキュベットの中心Oと一致するように当該キュベット内に配置されたピペットの外壁(図10において2点鎖線で示す)とキュベットの内壁との距離Rに基づいて設定される。具体的に、点aは、点Oとの距離r1が例えば0.7〜0.8Rとなるように設定される。距離r1が0.8Rに設定された場合、ピペットとキュベットとの位置調整が正確である限り、キュベットの中心である点Oから0.8Rだけずれた点aにおいてピペットがキュベット内に挿入されたとしても、当該ピペットの外壁とキュベットの内壁との間には、R−0.8R=0.2Rのクリアランスが確保されるので、ピペットがキュベットの内壁に接触することはない。
【0068】
換言すれば、ピペットとキュベットとの相対位置が0.2R以上ずれていると、点aでピペットを下降させたときに当該ピペットがキュベットの内壁に接触するか、又は、場合によってはキュベットの鍔部41の上面に衝突することになる。ピペットを用いた検体分析装置では、分注時におけるピペットの下降位置が容器の中心から若干ずれたとしても、当該容器内に挿入されている限り、エラーは検出されない。しかし、このように下降位置がずれた状態は、これを放置して分析作業を続けるうちに、ピペットが容器内に挿入されずに当該容器に衝突する等して破損するおそれがあるため、早期にメンテナンスを実行してピペットと容器との位置調整を行うことが好ましい。本実施の形態によれば、ピペットの下降位置がキュベットの中心Oから所定距離だけずれた場合には、点a又は後述する点bでの下降位置においてピペットとキュベットとが接触するため、エラーの検出が可能となる。本実施の形態では、ピペットとキュベットとの相対位置のずれを早期に検出することでピペットの破損や、破損に伴う分析作業の中断を防止することができる。
【0069】
ついでステップS6において、測定装置2の制御部501は、第1試薬分注ユニット27の駆動部141aを駆動させて当該第1試薬分注ユニット27に装着されたピペットを下降させる。このときの下降速度は、衝突によるピペットの破損を防止するため、通常の分析作業における試薬分注時よりも低速で下降させる。具体的に、試薬分注時の下降速度(例えば、320mm/s)の1/4〜1/2程度の速度で下降させる。
【0070】
下降したピペットの先端がキュベットCの内壁に強く接触するか又は当該キュベットCの鍔部40等に衝突すると、第1試薬分注ユニット27の、検知部材173及び接触検出用センサ170からなる接触検知部により当該接触又は衝突が検知される。
【0071】
ついでステップS7において、測定装置2の制御部501は、エラーが検知されたか否かの判断をする。測定装置2の制御部501は、エラーが検知された(YES)と判断する場合、ステップS8に処理を進め、エラーが検知されていない(NO)と判断する場合、ステップS9に処理を進める。前述した検知部材173及び接触検出用センサ170からなる接触検知部からの信号に基づいて、エラーが検知されたか否かの判断が行われる。
【0072】
ステップS8において、測定装置2の制御部501は、エラー検知信号を制御装置4に送信し、エラー検知信号を受信した制御装置4は、表示部4bに装置のメンテナンスを促す旨のメッセージを表示させる。このメッセージには、メンテナンスが必要である部位が、第1試薬分注ユニット27及びキュベットテーブル23であることが含まれる。ユーザーは、このメッセージに従って、サービス会社にメンテナンスの依頼を行う。ただし、ピペットの下降位置を意図的に中心からずらした結果エラーが検知されたものと考えられ、位置ずれはほとんどの場合において許容範囲内である(中心からずらさずに所定位置で下降させた場合、前記接触や衝突が生じない状態である)ので、ステップS1において受信された精度管理用検体の測定開始指示による測定自体は継続して行われる。つまり、メンテナンスは、ステップS1において受信された精度管理用検体の測定開始指示による測定が終了してから行われる。なお、万一、実際の測定時にピペットがキュベットに接触又は衝突すると、前記接触検知部からの検知信号に基づいて、その時点でピペットの移動は停止される。
【0073】
本実施の形態では、第1試薬分注ユニット27に装着されたピペットと及びキュベットテーブル23に配設されたキュベットとの相対位置にずれが生じたことが検出される。この場合、前記相対位置のずれは、第1試薬分注ユニット27及び/又はキュベットテーブル23の駆動部等の異常により生じるので、メンテナンスに際しては、第1試薬分注ユニット27及びキュベットテーブル23の両方を点検する必要がある。
【0074】
ついでステップS9において、測定装置2の制御部501は、第1試薬分注ユニット27の駆動部141aを駆動させて下降位置にあるピペットを上昇させる。
【0075】
ついでステップS10において、測定装置2の制御部501は、第1試薬分注ユニット27の駆動部141aを駆動させて当該第1試薬分注ユニット27に装着されたピペットを、キュベットの中心からずれた第2の位置(図10の点b)まで水平移動させる。前記点bは、キュベットの中心である点Oからキュベット内壁までの距離より短い距離だけ、当該点Oから離れた点である。前記点bは、また、ピペットの軌跡上において、キュベットの中心から前記点aと逆方向にずれた点である。この点bも、前記点aと同様に、その中心がキュベットの中心Oと一致するように当該キュベット内に配置されたピペットの外壁(図10において2点鎖線で示す)とキュベットの内壁との距離Rに基づいて設定される。具体的に、点bは、点Oとの距離r2が例えば0.7〜0.8Rとなるように設定される。
【0076】
ついでステップS11において、測定装置2の制御部501は、第1試薬分注ユニット27の駆動部141aを駆動させて当該第1試薬分注ユニット27に装着されたピペットを下降させる。このときの下降速度も、衝突によるピペットの破損を防止するため、ステップS6同様に、通常の分析作業における試薬分注時よりも低速で下降させる。
【0077】
ついでステップS12において、測定装置2の制御部501は、エラーが検知されたか否かの判断をする。測定装置2の制御部501は、エラーが検知された(YES)と判断する場合、ステップS13に処理を進め、エラーが検知されていない(NO)と判断する場合、ステップS14に処理を進める。前述した検知部材173及び接触検出用センサ170からなる接触検知部からの信号に基づいて、エラーが検知されたか否かの判断が行われる。
【0078】
ステップS13において、測定装置2の制御部501は、エラー検知信号を制御装置4に送信し、エラー検知信号を受信した制御装置4は、ステップS8と同様にして、表示部4bに装置のメンテナンスを促す旨のメッセージを表示させる。
ついでステップS14において、測定装置2の制御部501は、第1試薬分注ユニット27の駆動部141aを駆動させて下降位置にあるピペットを上昇させる。
【0079】
ついでステップS15において、測定装置2の制御部501は、第1試薬分注ユニット27の駆動部141aを駆動させて当該第1試薬分注ユニット27に装着されたピペットを、初期位置に移動させる。
【0080】
なお、図8〜9に示される位置確認では、例として第1試薬分注ユニット27とキュベットテーブル23との位置確認が終了した後に精度管理用検体の測定が行われているが、実際には、表1に示される組合せのすべてについて位置確認が終了した後に精度管理用検体の測定が行われる。この場合、18種類の組合せについて順に位置確認を行なってもよいし、複数の組合せを並行して行なってもよい。例えば、確認対象が重複していないので、第1試薬分注ユニット27とキュベットテーブル23との位置確認と並行して、第2検体分注ユニット26と搬送機構部6との位置確認を行うことができる。並行して位置確認を行なうことで、位置確認に要する時間を短縮することができる。並行した位置確認は、後述する容器移動部とテーブル等との位置確認(表2参照)でも行なうことができる。
【0081】
<第2実施形態>
前述した第1実施形態では、ピペットと容器の位置確認を行うために、ピペットを、容器の中心からずれた複数の位置で下降させているが、第2実施形態では、容器の方を複数の停止位置まで移動させ、それぞれの停止位置において、ピペットの先端を、前記容器内に配置させる。この場合、前記複数の停止位置における前記容器の中心が、前記ピペットの中心軸を基準として互いに異なる方向に(互いに逆方向に)位置するように、前記容器が配設されたテーブル等の移動が制御される。
【0082】
図12は、第2実施形態に係る位置確認の説明図である。図12において、実線の円は、理想的な分注位置におけるキュベットの内壁(図11のA―A断面における内壁)を示しており、キュベットの中心とピペットの中心軸Poとが一致している。破線で示される円は、ピペットの中心軸Poを基準として互いに逆方向の位置X又は位置Yを示している。位置X及び位置Yは、実線で示される理想的な分注待機位置から、キュベット半径とピペット半径との差より短い距離だけずれた位置である。より詳細には、その中心がキュベットの中心と一致するように当該キュベット内に配置されたピペットの外壁とキュベットの内壁との距離より短い距離だけずれた位置である。
【0083】
この第2実施形態においても、前記第1実施形態と同様に、ピペットと容器との相対位置のずれが所定量を超えているか否かを確認することができる。
なお、図12で描かれた軌跡は、キュベットの中心の軌跡である。
【0084】
<第3実施形態>
前述した第1実施形態及び第2実施形態では、ピペットと容器の相対位置のずれを確認しているが、第3実施形態では、容器を把持して移動させる容器移動部に把持された容器と、この容器が載置される保持孔との相対位置のずれを確認する。分析に際しては、第1〜第3キャッチャユニットを用いて、キュベットの移動が行われるが、キャッチャユニットに把持されたキュベットの中心と、このキュベットを受け入れる保持孔等の中心とのずれが所定量を超えると、キュベットを保持孔内に配置することができなくなる。従って、このようなずれを前述した第1実施形態と同様に1日の分析作業の開始前に確認することで、キュベットが保持孔内に配置できないといった事態が発生するのを防止することができる。
【0085】
図13は、第3実施形態に係る検体分析装置における第1キャッチャユニット30の把持部30cの側面説明図であり、図14は同斜視説明図である。図13〜14に示されるように、第1キャッチャユニット30は、アーム30bの先端部に設けられた把持部30cによってキュベットCを挟み込んで把持することが可能である。また、第1キャッチャユニット30は、キュベットCを把持した状態でアーム30bを回動させることにより、把持したキュベットCを加温テーブル24等に供給することができる。
【0086】
把持部30cは、キュベットCの鍔部40を水平方向から挟持するための二股形状を有する一対の挟持部材30c1と、この一対の挟持部材30c1を互いに近づく方向に付勢する圧縮コイルバネ30c2とを有している。キュベットCの鍔部40は、互いに近づく方向に付勢された挟持部材30c1の二股形状部分に挟持されることにより、把持部30cに把持される。
【0087】
本実施の形態における第1キャッチャユニット30では、前記一対の挟持部材30c1間の部材30c3の下面に位置検査用の金属製の棒状体60を装着することができる穴61が形成されている。この穴61は、第1キャッチャユニット30の把持部30を正面から見て(図13において右側から見て)その中心位置に形成されている。棒状体60の端部は前記穴61内に圧入可能な太さに選定されている。なお、穴61の内周面に雌ねじを形成し、棒状体60の端部に形成した雄ねじを前記雌ねじに螺合させるようにしてもよい。
【0088】
また、第1キャッチャユニット30は静電容量型の接触検知部を備えており、加温テーブル24も金属で作製されている。したがって、金属製の棒状体60と加温テーブル24の保持孔内壁との接触を前記静電容量型の接触検知部で検知することができる。
【0089】
本実施の形態においても、前述した第1実施形態と同様に、金属製の棒状体60を、保持孔の中心からずれた複数の位置であって当該中心からの方向が互いに異なる複数の位置で前記保持孔内に配置させることにより、容器を把持して移動させる容器移動部に把持された容器と、この容器が載置される保持孔との相対位置のずれを確認することができる。ここでは、加温テーブル24を駆動することによって、保持孔の中心からずれた複数の位置であって当該中心からの方向が互いに異なる複数の位置で前記保持孔内に配置させる。ただし、一対の挟持部材30c1により挟持される容器の中心位置と棒状体60の中心軸とは前後(図13において左右方向)にずれているので、位置確認する際には、第1キャッチャユニット30は、容器を把持するときよりも一定距離だけ前進してから位置確認動作を行う必要がある。
【0090】
上記の説明では、加温テーブル24を駆動することによって、保持孔の中心からずれた複数の位置であって当該中心からの方向が互いに異なる複数の位置で前記保持孔内に配置させているが、前記第1キャッチャユニット30を駆動することによって、保持孔の中心からずれた複数の位置であって当該中心からの方向が互いに異なる複数の位置で前記保持孔内に配置させてもよい。また、前述した検体分析装置1では、以下の表2に示されるように、容器を把持する容器移動部と当該容器が配設されるテーブル等との組合せが複数存在しており、各組合せにおいて位置確認が行われる。
【0091】
【表2】
【0092】
〔その他の変形例〕
なお、本発明は前述した実施の形態に限定されるものではなく、特許請求の範囲内において種々の変更が可能である。例えば、前述した実施の形態では、精度管理用検体の測定時に位置確認を実行しているが、患者検体の測定時に実行してもよいし、位置確認開始ボタンを表示部に表示させ、ユーザーがこのボタンを押下したときに実行してもよい。
【0093】
また、前述した実施の形態では、位置確認の結果を表示部に表示しているが、表示部に表示せず、又は、表示部に表示させるとともに、制御装置の送信部からネットワークを介してサービス(メンテナンス)会社のサーバに送信してもよい。これにより、メンテナンス会社では、予想される必要な部品及び技術者の手配を効率的に行うことができる。
【0094】
また、前述した実施の形態では、ピペットをキュベットテーブルの保持孔に保持されたキュベット内に挿入して位置確認を行っているが、ピペットを、当該キュベットを保持する保持孔(開口)に挿入して位置確認を行なってもよい。また、キュベットを保持する保持孔に代えて、位置確認用の開口をキュベットテーブル等のテーブル上に設けてもよい。
【0095】
また、前述した実施の形態では、ピペットを水平方向にずらした後に当該ピペットを下降させて位置確認を行なっているが、まずピペットをキュベットの中心位置で下降させて当該キュベット内に挿入し、その後、ピペットを水平方向にずらすことにより、位置確認を行なってもよい。
【0096】
また、前述した実施の形態では、ピペットとキュベットとの接触を、検知部材173及び接触検出用センサ170からなる接触検知部を用いて光学的に検知しているが、容器搬送部及びピペットを金属で作製する場合には、静電容量式の接触検知部を採用することもできる。検知部材173及び接触検出用センサ170からなる接触検知部の場合は、ピペットの軸方向の移動を検知する機構であるため、ピペットの外面とキュベットの内壁とが接触するだけでピペットの軸方向の移動がない場合は検知されない。この点、静電容量式の接触検知部は、ピペットの外面とキュベットの内壁とが接触するだけで検知可能であるので、前述した、ピペット下降後に水平移動させる態様における接触検知部として効果的である。
【0097】
また、前述した実施の形態では、位置確認の結果エラーが検出された場合に、エラーメッセージを表示部に表示するものの測定の続行を許可しているが、精度管理用検体の測定に入る前に、ピペットを空キュベットの中心(意図的に中心からずらした位置ではなく、ピペットの所定の分注位置)で下降させる工程を実行することもできる。この場合、中心位置でピペットが挿入可能であることを確認することで、測定時にピペットがキュベットに接触又は衝突して作業が中断される事態を避けることができる。また、測定時に作業が中断してそれまでに使用した試薬や検体が無駄になることを防ぐことが出来る。
【0098】
また、前述した実施の形態では、ピペットが回動するアームの端部に取り付けられており、円形の軌跡に沿って水平面内を移動しているが、ピペットが互いに直交するX軸及びY軸に沿って水平面内を移動する機構においても、本発明を適用することができる。
【0099】
また、前述した実施の形態では、血液凝固測定装置に本発明を適用しているが、免疫分析装置、生化学測定装置等の他の臨床検体分析装置にも本発明を適用することができる。
【符号の説明】
【0100】
1 検体分析装置
2 測定装置
4 制御装置
4a 制御部
4b 表示部
4c キーボード
5 測定機構部
6 搬送機構部
13 検体容器
14 検体ラック
21 第1試薬テーブル
22 第2試薬テーブル
23 キュベットテーブル
24 加温テーブル
25 第1検体分注ユニット
26 第2検体分注ユニット
27 第1試薬分注ユニット
27a 軸
27b アーム
28 第2試薬分注ユニット
29 第3試薬分注ユニット
30 第1キャッチャユニット
31 第2キャッチャユニット
32 第3キャッチャユニット
34 キュベット搬送機
37 検出ユニット
P ピペット
C キュベット(容器)
【特許請求の範囲】
【請求項1】
液体を収容可能な容器を保持する容器保持部と、
ピペットを備えており、当該ピペットを下降させて、前記容器保持部によって保持された容器内に収容された液体を吸引する、及び/又は、当該容器内に液体を吐出する液体分注部と、
前記容器保持部に保持された容器又は前記容器保持部と前記ピペットとの接触を検知する接触検知部と、
前記ピペットの先端を、前記容器又は前記容器保持部に設けられた開口内の水平方向における複数の位置に配置させるよう前記液体分注部を制御し、前記接触検知部により前記容器又は前記容器保持部と前記ピペットとの接触が検知されたか否かを判定する位置確認処理を実行する制御部と
を備えたことを特徴とする分析装置。
【請求項2】
前記容器保持部は、保持した容器を搬送する容器搬送部であり、
前記制御部は、前記位置確認処理において、前記開口が所定の停止位置に位置するよう前記容器搬送部を制御するとともに、前記ピペットの先端を、前記開口内の水平方向における複数の位置に配置させるよう前記液体分注部を制御する、請求項1に記載の分析装置。
【請求項3】
前記複数の位置は、前記開口の中心から水平方向にずれた複数の位置であって当該中心からの方向が互いに異なる複数の位置である、請求項1又は2に記載の分析装置。
【請求項4】
前記位置確認処理では、前記開口の中心から互いに逆方向にずれた複数の位置で、前記ピペットの先端を当該開口内に配置させる、請求項3に記載の分析装置。
【請求項5】
前記位置確認処理では、前記ピペットを、前記開口の中心から水平方向にずれた位置から下降させることにより、当該ピペットの先端を前記開口内に配置させる、請求項3又は4に記載の分析装置。
【請求項6】
前記位置確認処理では、液体の吸引又は吐出時におけるピペットの下降速度よりも低速で当該ピペットを下降させて前記ピペットの先端を前記開口内に配置させる、請求項5に記載の分析装置。
【請求項7】
前記液体の測定開始指示を受け付ける測定開始指示受付手段をさらに備えており、
前記制御部は、前記測定開始指示受付手段が前記液体の測定開始指示を受け付けると、前記位置確認処理を実行する、請求項1〜6のいずれかに記載の分析装置。
【請求項8】
前記制御部は、前記測定開始指示受付手段が前記液体の測定開始指示を受け付けると、前記位置確認処理により前記接触検知部が前記容器又は容器保持部と前記ピペットとの接触を検知したとしても、前記液体の測定を続行する、請求項7に記載の分析装置。
【請求項9】
前記容器搬送部及びピペットが金属で作製されており、
前記接触検知部は、前記ピペットの前記容器保持部との接触を検知する静電容量式の接触検知部である、請求項1〜8のいずれかに記載の分析装置。
【請求項10】
前記位置確認処理では、前記ピペットを前記開口内に下降させた後に当該ピペットの先端を、前記開口の中心から水平方向にずれた複数の位置に配置させる、請求項3、4、及び7〜9のいずれかに記載の分析装置。
【請求項11】
前記接触検知部による検知結果を表示する表示部をさらに備えている請求項1〜10のいずれかに記載の分析装置。
【請求項12】
前記接触検知部による検知結果を外部に送信可能な送信部をさらに備えている請求項1〜11のいずれかに記載の分析装置。
【請求項13】
前記液体は、精度管理用検体であり、
前記測定開始指示受付手段は、前記精度管理用検体の測定開始指示を受け付ける精度管理開始指示受付手段であり、
前記制御部は、前記精度管理開始指示受付手段が精度管理用検体の測定開始指示を受け付けると、前記位置確認処理を実行する、請求項7〜12のいずれかに記載の分析装置。
【請求項14】
液体を収容可能な容器を保持し、保持した容器を搬送する容器搬送部と、
ピペットを備えており、当該ピペットを下降させて、前記容器搬送部によって搬送された容器内に収容された液体を吸引する、及び/又は、当該容器内に液体を吐出する液体分注部と、
前記容器搬送部に保持された容器又は前記容器搬送部と前記ピペットとの接触を検知する接触検知部と、
前記容器又は前記容器搬送部に設けられた開口が水平方向における複数の停止位置に位置するよう前記容器搬送部を制御するとともに、それぞれの停止位置において、前記ピペットの先端を、前記開口内に配置させるよう前記液体分注部を制御し、前記接触検知部により前記容器又は前記容器搬送部と前記ピペットとの接触が検知されたか否かを判定する位置確認処理を実行する制御部と
を備えたことを特徴とする分析装置。
【請求項15】
液体を収容可能な容器を保持する容器保持部と、
前記容器を把持する把持部を備えており、当該把持部により把持された容器を前記容器保持部に移動させることができ、さらに位置検査用の棒状体を実質的に垂直な状態で装着することができる容器移動部と、
前記容器保持部に保持された容器又は前記容器保持部と前記容器移動部に装着された棒状体との接触を検知する接触検知部と、
前記棒状体の先端を、前記容器又は前記容器保持部に設けられた開口内の水平方向における複数の位置に配置させるよう前記容器移動部を制御し、前記接触検知部により前記容器又は前記容器保持部と前記棒状体との接触が検知されたか否かを判定する位置確認処理を実行する制御部と
を備えたことを特徴とする分析装置。
【請求項16】
液体を収容可能な容器を保持する容器保持部と、前記容器保持部によって保持された容器内に収容された液体を吸引する、及び/又は、当該容器内に液体を吐出するピペットと、を有する分析装置における、ピペットの位置確認方法であって、
ピペットの先端を、前記容器又は前記容器保持部に設けられた開口内の水平方向における複数の位置に配置させる配置ステップと、
前記配置ステップの実行中に、前記容器保持部に保持された容器又は前記容器保持部と前記ピペットとの接触を検知した場合に、通知を出力する出力ステップと、を有する、位置確認方法。
【請求項17】
前記容器保持部は水平方向に移動可能であり、前記ピペットは水平方向及び上下方向に移動可能である、請求項16に記載の位置確認方法。
【請求項1】
液体を収容可能な容器を保持する容器保持部と、
ピペットを備えており、当該ピペットを下降させて、前記容器保持部によって保持された容器内に収容された液体を吸引する、及び/又は、当該容器内に液体を吐出する液体分注部と、
前記容器保持部に保持された容器又は前記容器保持部と前記ピペットとの接触を検知する接触検知部と、
前記ピペットの先端を、前記容器又は前記容器保持部に設けられた開口内の水平方向における複数の位置に配置させるよう前記液体分注部を制御し、前記接触検知部により前記容器又は前記容器保持部と前記ピペットとの接触が検知されたか否かを判定する位置確認処理を実行する制御部と
を備えたことを特徴とする分析装置。
【請求項2】
前記容器保持部は、保持した容器を搬送する容器搬送部であり、
前記制御部は、前記位置確認処理において、前記開口が所定の停止位置に位置するよう前記容器搬送部を制御するとともに、前記ピペットの先端を、前記開口内の水平方向における複数の位置に配置させるよう前記液体分注部を制御する、請求項1に記載の分析装置。
【請求項3】
前記複数の位置は、前記開口の中心から水平方向にずれた複数の位置であって当該中心からの方向が互いに異なる複数の位置である、請求項1又は2に記載の分析装置。
【請求項4】
前記位置確認処理では、前記開口の中心から互いに逆方向にずれた複数の位置で、前記ピペットの先端を当該開口内に配置させる、請求項3に記載の分析装置。
【請求項5】
前記位置確認処理では、前記ピペットを、前記開口の中心から水平方向にずれた位置から下降させることにより、当該ピペットの先端を前記開口内に配置させる、請求項3又は4に記載の分析装置。
【請求項6】
前記位置確認処理では、液体の吸引又は吐出時におけるピペットの下降速度よりも低速で当該ピペットを下降させて前記ピペットの先端を前記開口内に配置させる、請求項5に記載の分析装置。
【請求項7】
前記液体の測定開始指示を受け付ける測定開始指示受付手段をさらに備えており、
前記制御部は、前記測定開始指示受付手段が前記液体の測定開始指示を受け付けると、前記位置確認処理を実行する、請求項1〜6のいずれかに記載の分析装置。
【請求項8】
前記制御部は、前記測定開始指示受付手段が前記液体の測定開始指示を受け付けると、前記位置確認処理により前記接触検知部が前記容器又は容器保持部と前記ピペットとの接触を検知したとしても、前記液体の測定を続行する、請求項7に記載の分析装置。
【請求項9】
前記容器搬送部及びピペットが金属で作製されており、
前記接触検知部は、前記ピペットの前記容器保持部との接触を検知する静電容量式の接触検知部である、請求項1〜8のいずれかに記載の分析装置。
【請求項10】
前記位置確認処理では、前記ピペットを前記開口内に下降させた後に当該ピペットの先端を、前記開口の中心から水平方向にずれた複数の位置に配置させる、請求項3、4、及び7〜9のいずれかに記載の分析装置。
【請求項11】
前記接触検知部による検知結果を表示する表示部をさらに備えている請求項1〜10のいずれかに記載の分析装置。
【請求項12】
前記接触検知部による検知結果を外部に送信可能な送信部をさらに備えている請求項1〜11のいずれかに記載の分析装置。
【請求項13】
前記液体は、精度管理用検体であり、
前記測定開始指示受付手段は、前記精度管理用検体の測定開始指示を受け付ける精度管理開始指示受付手段であり、
前記制御部は、前記精度管理開始指示受付手段が精度管理用検体の測定開始指示を受け付けると、前記位置確認処理を実行する、請求項7〜12のいずれかに記載の分析装置。
【請求項14】
液体を収容可能な容器を保持し、保持した容器を搬送する容器搬送部と、
ピペットを備えており、当該ピペットを下降させて、前記容器搬送部によって搬送された容器内に収容された液体を吸引する、及び/又は、当該容器内に液体を吐出する液体分注部と、
前記容器搬送部に保持された容器又は前記容器搬送部と前記ピペットとの接触を検知する接触検知部と、
前記容器又は前記容器搬送部に設けられた開口が水平方向における複数の停止位置に位置するよう前記容器搬送部を制御するとともに、それぞれの停止位置において、前記ピペットの先端を、前記開口内に配置させるよう前記液体分注部を制御し、前記接触検知部により前記容器又は前記容器搬送部と前記ピペットとの接触が検知されたか否かを判定する位置確認処理を実行する制御部と
を備えたことを特徴とする分析装置。
【請求項15】
液体を収容可能な容器を保持する容器保持部と、
前記容器を把持する把持部を備えており、当該把持部により把持された容器を前記容器保持部に移動させることができ、さらに位置検査用の棒状体を実質的に垂直な状態で装着することができる容器移動部と、
前記容器保持部に保持された容器又は前記容器保持部と前記容器移動部に装着された棒状体との接触を検知する接触検知部と、
前記棒状体の先端を、前記容器又は前記容器保持部に設けられた開口内の水平方向における複数の位置に配置させるよう前記容器移動部を制御し、前記接触検知部により前記容器又は前記容器保持部と前記棒状体との接触が検知されたか否かを判定する位置確認処理を実行する制御部と
を備えたことを特徴とする分析装置。
【請求項16】
液体を収容可能な容器を保持する容器保持部と、前記容器保持部によって保持された容器内に収容された液体を吸引する、及び/又は、当該容器内に液体を吐出するピペットと、を有する分析装置における、ピペットの位置確認方法であって、
ピペットの先端を、前記容器又は前記容器保持部に設けられた開口内の水平方向における複数の位置に配置させる配置ステップと、
前記配置ステップの実行中に、前記容器保持部に保持された容器又は前記容器保持部と前記ピペットとの接触を検知した場合に、通知を出力する出力ステップと、を有する、位置確認方法。
【請求項17】
前記容器保持部は水平方向に移動可能であり、前記ピペットは水平方向及び上下方向に移動可能である、請求項16に記載の位置確認方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図6】
【図7】
【公開番号】特開2012−181136(P2012−181136A)
【公開日】平成24年9月20日(2012.9.20)
【国際特許分類】
【出願番号】特願2011−45133(P2011−45133)
【出願日】平成23年3月2日(2011.3.2)
【出願人】(390014960)シスメックス株式会社 (810)
【Fターム(参考)】
【公開日】平成24年9月20日(2012.9.20)
【国際特許分類】
【出願日】平成23年3月2日(2011.3.2)
【出願人】(390014960)シスメックス株式会社 (810)
【Fターム(参考)】
[ Back to top ]