
分析装置及び分析方法
【課題】分析装置の精度を向上させる。
【解決手段】走査型アトムプローブ200は、試料3の表面を走査する引出電極5と、試料3に電圧を供給する直流高圧電源2と、直流高圧電源2により供給された電圧により引出電極5と試料3の間に生じた電界によって、試料3の表面の原子又は原子団を試料3から脱離させたときに、脱離したイオン8を検出する位置感知型イオン検出器11とを備える。位置感知型イオン検出器11は、イオン8の入射により電子を放出する電子増倍板25と、電子増倍板25から放出された電子の一部が入射する螺旋状の遅延回路線41と、電子増倍板25から放出された電子のうち、遅延回路線41の線間を通過した電子が入射する導電板42とを含む。
【解決手段】走査型アトムプローブ200は、試料3の表面を走査する引出電極5と、試料3に電圧を供給する直流高圧電源2と、直流高圧電源2により供給された電圧により引出電極5と試料3の間に生じた電界によって、試料3の表面の原子又は原子団を試料3から脱離させたときに、脱離したイオン8を検出する位置感知型イオン検出器11とを備える。位置感知型イオン検出器11は、イオン8の入射により電子を放出する電子増倍板25と、電子増倍板25から放出された電子の一部が入射する螺旋状の遅延回路線41と、電子増倍板25から放出された電子のうち、遅延回路線41の線間を通過した電子が入射する導電板42とを含む。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、試料を分析する技術に関し、とくに、試料表面を原子レベルの分解能で分析可能な分析装置及び分析方法に関する。
【背景技術】
【0002】
試料の表面を原子レベルで分析するための装置に、本発明者が開発した走査型アトムプローブ(Scanning Atom Probe:以下、「SAP」とも表記する)がある(特許文献1参照)。SAPは、漏斗型の微細な引出電極を備えており、この引出電極により平面状の試料を面に沿って走査する。試料面上に数μmの凹凸があり、その突起の先端の位置に引出電極の先端の穴が合うと、先端と穴との間の微細な空間に発生した高電界が、突起先端の原子を電界蒸発させる。このように、試料を表面から個々の原子又は原子団を陽イオンとして電界蒸発させたときに、蒸発した陽イオンを質量分析器に導入して分析することにより、蒸発領域の組成分布を原子レベルの分解能で解明できる。
【特許文献1】特開平7−43373号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
SAPの開発により、分析可能な試料の幅は飛躍的に広がった。この優れた機能を有する装置が、より多くの研究者に利用され、素晴らしい研究成果を導き出すために、本発明者は、SAPのさらなる改良に努力を重ねている。とくに、有機物を分析対象とする場合は、陽イオンを精確に同定するために、高い質量分析能が必要となるので、より分析精度の高いSAPの開発が求められている。
【0004】
本発明は、こうした現状に鑑みてなされたものであり、その目的は、より分析精度の高い分析装置を提供することにある。
【課題を解決するための手段】
【0005】
本発明のある態様は、分析装置に関する。この分析装置は、試料の表面を走査する電極と、前記試料に電圧を供給する電圧供給部と、前記電圧供給部により供給された電圧により前記電極と前記試料の間に生じた電界によって、前記試料の表面の原子又は原子団を前記試料から脱離させたときに、脱離した粒子を検出する粒子検出部と、を備え、前記粒子検出部は、前記粒子の入射により電子を放出する電子増倍板と、前記電子増倍板の後方に設けられ、前記電子増倍板から放出された電子の一部が入射する螺旋状の遅延回路線と、前記遅延回路線の後方に設けられ、前記電子増倍板から放出された電子のうち、前記遅延回路線の線間を通過した電子が入射する導電板と、を含むことを特徴とする。
【0006】
本発明の別の態様も、分析装置に関する。この分析装置は、試料の表面を走査する電極と、前記試料に電圧を供給する電圧供給部と、前記電圧供給部により供給された電圧により前記電極と前記試料の間に生じた電界によって、前記試料の表面の原子又は原子団を前記試料から脱離させたときに、脱離した粒子を検出する粒子検出部と、を備え、前記粒子検出部は、前記粒子の入射により電子を放出する電子増倍板と、前記電子増倍板の後方に設けられ、前記電子増倍板から放出された電子が通過する可能性のある領域に、前記粒子が前記電子増倍板に入射したときに放出される電子の少なくとも一部が必ず入射するような間隔で交差しないように設けられた一本の遅延回路線と、前記遅延回路線の後方に設けられ、前記電子増倍板から放出された電子のうち、前記遅延回路線の線間を通過した電子が入射する導電板と、を含むことを特徴とする。
【0007】
前記遅延回路線は、前記電子増倍板に平行な平面上に設けられてもよい。
【0008】
分析装置は、前記遅延回路線の一端から電子が検出された時刻と、前記導電板から電子が検出された時刻の差を用いて、前記遅延回路線における前記電子の入射位置を算出することにより、前記粒子の入射位置を算出する解析部を更に備えてもよい。
【0009】
前記解析部は、複数の粒子が前記試料の表面から脱離して前記電子増倍板に入射した場合に、それぞれの粒子が前記電子増倍板に入射したときに前記電子増倍板から放射された電子について、前記遅延回路線の一端から電子が検出された時刻T1と前記導電板から電子が検出された時刻T0の差と、前記遅延回路線の他端から電子が検出された時刻T2と前記導電板から電子が検出された時刻T0の差との和T1+T2−2T0が一定であることを利用して、前記和が所定の定数となるT0、T1、T2の組合せを検出することにより、それぞれの粒子の入射位置を算出してもよい。
【0010】
前記遅延回路線の一端は前記導電板に接続されてもよく、前記遅延回路線の一端に到達した電子は、前記導電板を介して検出されてもよい。
【0011】
分析装置は、前記粒子検出部の後方に設けられ、前記粒子検出部よりも高い分解能で粒子の質量を分析することが可能な質量分析部を更に備えてもよく、前記粒子検出部は、前記試料の表面から脱離された粒子の少なくとも一部を通過させるための貫通孔を有してもよく、前記質量分析部は、前記貫通孔を通過した粒子の質量を分析してもよい。
【0012】
分析装置は、前記貫通孔に設けられ、前記貫通孔の外部の電界を遮断する中空管を更に備えてもよい。
【0013】
本発明の更に別の態様は、分析方法に関する。この分析方法は、試料に電圧を供給するステップと、前記試料の表面の原子又は原子団を前記電圧により脱離させるステップと、脱離した粒子を電子増倍板に入射させるステップと、前記粒子の入射により前記電子増倍板から放出された電子の一部が、螺旋状の遅延回路線に入射してから前記遅延回路線の一端に到達するまでの時間を算出するステップと、算出された時間から前記粒子の入射位置を算出するステップと、を含むことを特徴とする。
【0014】
なお、以上の構成要素の任意の組合せ、本発明の表現を方法、装置、システムなどの間で変換したものもまた、本発明の態様として有効である。
【発明の効果】
【0015】
本発明によれば、分析装置の精度を向上させることができる。
【発明を実施するための最良の形態】
【0016】
(前提技術)
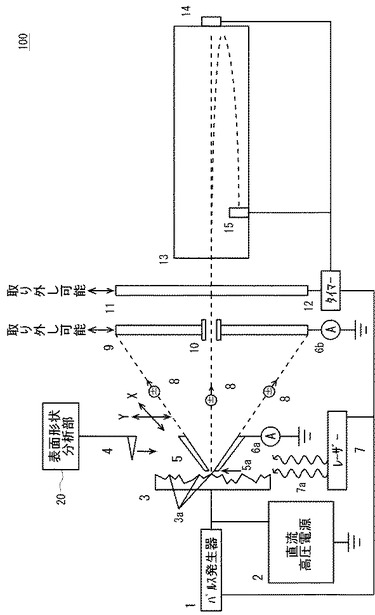
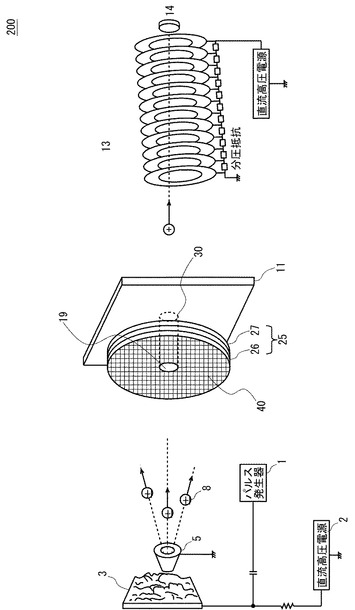
まず、前提技術として、走査型アトムプローブについて説明する。図1は、分析装置の一例である走査型アトムプローブの全体構成を示す図である。走査型アトムプローブ100は、主に、試料に電圧を供給するパルス発生器1および直流高圧電源2、試料3の表面を走査する漏斗型の引出電極5、引出電極5と交換可能に設けられた探針4、試料3から電界放射された電子による像を投影するスクリーン9、引出電極5に入射した電子の電流値を測定する第1の電流計6a、スクリーン9に入射した電子の電流値を測定する第2の電流計6b、試料3の表面にパルスレーザー光を照射するレーザー7、試料3から電界蒸発した陽イオンを検出する位置感知型イオン検出器11、試料3から電界蒸発した陽イオンの質量を分析するリフレクトロン型質量分析器13、イオンの飛行時間を測定するタイマー12、および探針4により試料3の表面形状を分析する表面形状分析部20を備える。
【0017】
この走査型アトムプローブによる試料の分析方法の手順を説明する。まず、試料3に直流高圧電源2から直流バイアス電圧を印加しつつ、接地された引出電極5により試料3の表面を走査し、微細な突起3aを探索する。試料3の表面が研磨されて平坦になっている場合は、ダイシングカッターにより碁盤目状に溝を入れてもよい。溝の深さおよび間隔は、10μm以下であることが好ましい。溝になっていない部分が分析領域となる。試料の腐食効果を研究するために、試料を腐食液またはガス内に置いた後、分析を行ってもよい。腐食領域はくぼむため、分析される領域、すなわちくぼんでいない領域が腐食に強い領域であることが分かる。
【0018】
引出電極5の先端を試料表面に近づけ、試料3に負電圧を印加すると、試料表面の突起3aと引出電極5の穴との間の微細な空間に負の高電界が発生し、突起3aの先端部分から電子が電界放射される。引出電極5の先端の穴5aの中心が、ちょうど突起3aの先端部分の直上にあるときは、ほぼ全ての放射電子8がスクリーン9に向かって飛行し、突起表面をスクリーン9に拡大投影する。このとき、第2の電流計6bに流れる電流は最大となる。引出電極5の先端の穴5aが突起3aの先端部分からずれると、ほぼ全ての放射電子が引出電極5に向かい、第1の電流計6aにより電流が観測される。このとき、第2の電流計6bに流れる電流は減少する。このように、引出電極5が試料3の表面を走査するとき、第1の電流計6aおよび第2の電流計6bにおいて測定される、電界放射された電子による電流は、試料表面の形状を反映して変化する。この現象を利用して、分析すべき突起3aの先端の位置を推測し、その位置に引出電極5の位置を合わせることができる。
【0019】
引出電極5の位置を試料3の突起3aの先端に合わせる別の方法は、走査型トンネル顕微鏡(Scanning Tunneling Microscope:以下、「STM」とも表記する)、原子間力顕微鏡(Atomic Force Microscope:以下、「AFM」とも表記する)、または走査型プローブ顕微鏡(Scanning Probe Microscope:以下、「SPM」とも表記する)の技術を利用する。図1および図2に示した例においては、SAP100は、引出電極5と交換可能に設けられた探針4を備える。試料が導電性材料の場合は、表面形状分析部20としてSTMを、探針4としてSTM用の探針を用い、試料が絶縁性材料の場合は、表面形状分析部20としてAFMを、探針4としてAFM用の探針を用いればよい。
【0020】
引出電極5と探針4を交換し、探針4で試料表面を走査して、表面形状分析部20により試料表面の形状を描写する。探針4により、試料表面の形状のみならず、SAP100により質量分析される突起先端の表面の原子配列も描写される。表面形状を描写した後、引出電極5を所望の突起の直上に位置合わせする。この方法によれば、試料表面の形状および原子配列を取得してから、所望の領域を選択し、一層ごとに質量分析を行うことができるので、分析領域の原子配列と組成との相関関係を知ることができる。
【0021】
引出電極5を表面形状分析部20の探針4として用いてもよい。この場合、引出電極5の先端に、探針4として機能する突起を設けてもよい(例えば、本発明者らによる米国特許第6,797,952号参照)。
【0022】
引出電極5の先端の穴5aの中心と、試料3の突起3aの先端とを位置合わせした後、直流高圧電源2から負のバイアス電圧を試料3に印加し、突起3aの先端から電子を電界放射させる。放射電子8はスクリーン9に入射し、その放射電子による電流値が第2の電流計6bにより測定される。負のバイアス電圧値を変化させて、バイアス電圧値に対する電流値の変化(I−Vプロット)を測定する。これにより、分析領域の電子状態を知ることができる。
【0023】
つづいて、正の直流バイアス電圧を試料3に印加し、それに重畳させて、パルス発生器1により正のパルス電圧を印加する。直流バイアス電圧とパルス電圧の総和が十分に高いと、突起3aの先端部分の表面原子が電界蒸発して陽イオン8となり、放射電子8とほぼ同じ軌跡を描いてスクリーン9に入射する。試料3が絶縁性材料または半導体材料のような導電性の低い材料である場合は、パルス電圧が効率よく突起3aの先端まで伝わらないので、直流電圧が印加されている試料3に、レーザー7によりパルスレーザー光7aを照射し、光励起電界蒸発により表面原子を陽イオンとして脱離させる。これにより、従来のAPでは測定に適さないとされていた低電導性材料であっても、導電性材料と同様に分析することができる。
【0024】
電界蒸発した全ての陽イオン8を質量分析するために、スクリーン9を取り外し、陽イオン8を位置感知型イオン検出器11に入射させる。位置感知型イオン検出器11としては、たとえば、米国特許第5,644,128号に開示された装置が好適である。突起3aから位置感知型イオン検出器11までの陽イオン8の飛行時間は、タイマー12により計測される。タイマー12は、パルス発生器1から開始信号を受けて計測を開始し、位置感知型イオン検出器11からの信号で計測を停止することにより、陽イオン8の飛行時間を計測する。検出されたイオンの質量と電荷との比は、イオンの飛行時間、試料3に印加された電圧値の総和、および試料表面から位置感知型イオン検出器11までの飛行経路により得られる。位置感知型イオン検出器11の入射位置と、電界蒸発する前の原子の位置とは一対一に対応しており、電界蒸発により一層ずつ原子を蒸発させて検出することができるので、分析領域を構成する原子の3次元的な配置を得ることができる。たとえば、一辺が40mmで、位置分解能が0.5mmの位置感知型イオン検出器11を用いた場合、80原子×80原子の領域が分析できることになるが、深さ方向に100原子層分析すると、64万個の原子の立体的な組成分布が得られることになる。
【0025】
飛行時間計測型の質量分析器では、質量の分解能は、イオンの飛行時間計測の正確さに依存する。タイマー12の時間分解能には限界があるので、質量分解能を向上させるには、イオンの飛行経路を長くすることが好ましい。すなわち、飛行経路が長いほど、質量分解能が向上する。本実施の形態のSAP100では、高い質量分解能を実現するために、リフレクトロン型質量分析器13を用いている。分析領域の高分解能質量分析を行うために、位置感知型イオン検出器11を取り外し、スクリーン9を元の位置に戻す。
【0026】
突起3aの先端から電子を電界放射させて、電子状態を反映した像をスクリーン9に投影する。スクリーン9の探査穴10に所望の分析領域の像があるときに、パルス電圧またはパルスレーザー光を試料3に印加して、表面原子を電界蒸発させる。分析領域から電界蒸発した陽イオンは、探査穴10を通り抜けて、リフレクトロン型質量分析器13の飛行空間に入射する。リフレクトロン型質量分析器13は、直線飛行経路の末端に設けられた第1のイオン検出器14と、入射口側に設けられた第2のイオン検出器15を備える。第1のイオン検出器14は、電界蒸発の後に中性化された原子を検出できる。第2のイオン検出器15は、高い質量分解能でイオンを検出できる。第1のイオン検出器14および第2のイオン検出器15によりイオンが検出されたとき、その信号がタイマーに送られ、イオンの飛行時間が計測される。リフレクトロン型質量分析器13により分析される試料面上の領域は、位置感知型イオン検出器11よりも狭く、たとえば直径数nm程度であるが、位置感知型イオン検出器11よりも高い精度でイオンの質量を分析することができるので、用途に応じて、いずれを用いるかを適宜選択すればよい。
【0027】
本前提技術の走査型アトムプローブ100によれば、以下に列記するような優れた効果が得られる。
1)引出電極5を導入したことにより、試料を針状にする必要がなく、平面状の試料であっても、表面に数μm程度の凹凸があれば分析可能である。
2)試料が平面状であるため、パルスレーザー光の照射が容易であり、光励起電界蒸発を利用して、半絶縁性材料も分析可能である。
3)分析速度とデータ処理能力を向上させることにより、ppmからppb以上の微量分析が可能である。
4)電界放射のI−V特性により、分析領域の電子状態の解明が可能である。
5)電界蒸発の際に、弱い結合ほど切れやすいので、イオン種の統計分布から結合状態を知ることが可能である。
【0028】
また、SAPの利点を、二次イオン質量分析器(SIMS)およびオージェ電子分光器(AES)との比較により列記する。
1)SAPの分解能は、深さ方向では1原子層、横方向では原子レベルであり、組成の3次元分布を原子レベルの高分解能で得ることも可能である。
2)イオン検出器の検出感度は全ての原子、分子について同等であり、AESでは検出できない水素も検出可能である。
3)検出イオン種、とくにクラスターの検出により、試料内部の結合状態の解明が可能である。
4)分析領域からの電界放射電流のI−V特性により、電子状態と組成との関連性を究明することが可能である。
5)検出原子数を増やすことにより、ppmからppb以上の微量分析が可能である。
【0029】
(実施の形態)
上述したように、前提技術の走査型アトムプローブ100は、試料の表面から1原子層ずつ電界蒸発させてイオンを同定していくことにより、試料の組成分布を立体的に分析することが可能である。このとき、イオン検出器として位置感知型イオン検出器11を用いる場合は、質量分解能ではリフレクトロン型質量分析器13に劣るものの、広い領域の組成分布を立体的に取得することができるという利点がある。他方、リフレクトロン型質量分析器13を用いる場合は、分析範囲は位置感知型イオン検出器11よりも狭いものの、深さ方向の組成の変化を高質量分解能で取得できるという利点がある。
【0030】
しかし、前提技術で説明した走査型アトムプローブ100は、位置感知型イオン検出器11とリフレクトロン型質量分析器13の双方を有しているが、両者を同時に作動させて同一領域を分析する事はできない。位置感知型イオン検出器11を用いて3次元的な組成分布を分析する場合には、リフレクトロン型質量分析器13にはイオンが導入されないので高分解能の質量分析はできない。また、移動可能に設けられた位置感知型イオン検出器11を横方向にずらし、リフレクトロン型質量分析器13により高分解能の質量分析を行う場合には、位置感知型イオン検出器11にはイオンが導入されないので広い範囲の3次元的な組成分布は得られない。
【0031】
同一試料について、位置感知型イオン検出器11を移動しつつ、ある領域は位置感知型イオン検出器11により、別の領域はリフレクトロン型質量分析器13により分析することも可能ではあるが、この場合、それぞれのイオン検出器は深さの異なる領域を分析することになってしまう。その上、位置感知型イオン検出器11の位置を変えるには、遅延回路などを含む超高周波数の複数の導線を大きく撓ませなければならないので、移動させるたびにインピーダンスなどを調整する必要があり、実験に要する時間が長くなってしまう上に、実験精度を保つのは容易ではない。
【0032】
別の例として、位置感知型イオン検出器11を図2のDRの位置に置き、質量分解能を向上させることもできる。しかし、この場合は、リフレクトロン型質量分析器13への入射口が大きく、奥行きが浅いので、分解能はそれ程高くない。また、位置感知型イオン検出器11に映し出される像が歪むので、その補正も困難である。
【0033】
更に別の例として、位置感知型イオン検出器11とリフレクトロン型質量分析器13を横に並置し、試料3を回転させることにより、双方のイオン検出器へイオンを導入することもできる。しかし、この場合は、試料の同じ領域を分析するための位置合わせが非常に困難である。
【0034】
そこで、本実施の形態では、両者を同時に作動させ、同時に電界蒸発したイオンの一部をリフレクトロン型質量分析器13で精密に質量分析しつつ、他のイオンを位置感知型イオン検出器11で分析する技術を提案する。
【0035】
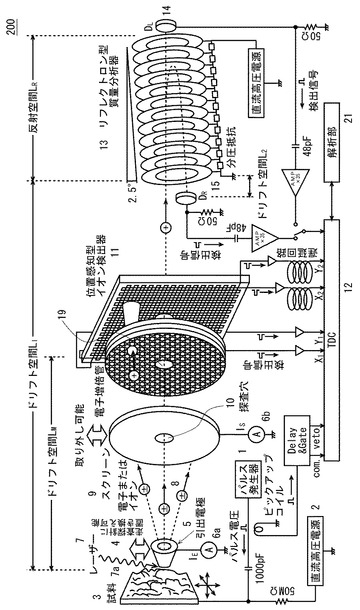
図2は、実施の形態に係る分析装置の一例である走査型アトムプローブ200の構成を示す。図2に示した走査型アトムプローブ200では、図1に示した前提技術の走査型アトムプローブ100の構成に比べて、電子増倍板及び位置感知型イオン検出器11の中央付近に、イオンを後方へ通過させるための貫通孔19が設けられている。その他の構成及び動作は、前提技術と同様である。
【0036】
試料表面の原子を、電界又は光照射などによりイオン化させたとき、イオン8は、試料3と引出電極5との間の電界により加速されて飛行する。位置感知型イオン検出器11とリフレクトロン型質量分析器13は、イオン8の飛行方向に対して直列に設けられているので、同じ領域から同時にイオン化されて引出電極5を通過した複数のイオンのうち、領域の中央付近からイオン化したイオンは、電子増倍板及び位置感知型イオン検出器11の貫通孔19を通過してリフレクトロン型質量分析器13へ導入され、それ以外のイオンは、位置感知型イオン検出器11へ導入される。
【0037】
リフレクトロン型質量分析器13へ導入されたイオンは、高質量分解能で分析同定され、より精確な質量が求められる。解析部21は、リフレクトロン型質量分析器13により検出されたイオンの質量を取得して、位置感知型イオン検出器11で検出されたイオンを同定するときに参照する。これにより、3次元的な組成分布の分析精度を格段に向上させることができる。
【0038】
試料が有機物である場合、複数原子からなるクラスターイオンが検出されるが、これらのイオンは多数の水素原子や炭素原子を含んでおり、質量数も大きい。したがって、このようなクラスターイオンを正確に同定するには、高い質量分解能が求められる。解析部21は、位置感知型イオン検出器11で検出されたイオンのうち、質量数が不明確なイオンについては、リフレクトロン型質量分析器13で検出されたほぼ同質量のイオンと比較対照することにより、それらのイオンの精確な質量を割り出す。これにより、試料が有機物であっても、精確な3次元の組成分布を分析することができる。
【0039】
位置感知型イオン検出器11に導入されるイオンと、リフレクトロン型質量分析器13に導入されるイオンは、同じ領域の同じ層からほぼ同時にイオン化したイオンであるから、組成などが類似していると考えられる。したがって、それらの一部の精確な質量分析結果を参照することにより、位置感知型イオン検出器11により検出されるイオンの分析精度が格段に向上することが期待できる。また、試料表面からイオン化したクラスターイオンを精確に同定することにより、試料表面の結合状態や結晶構造などを推定することができる。また、装置の各構成を移動させることなく、同時に位置感知型イオン検出器11とリフレクトロン型質量分析器13の双方による分析が可能となるので、実験に要する時間を飛躍的に短縮することができ、実験環境を均一に保つことができる。
【0040】
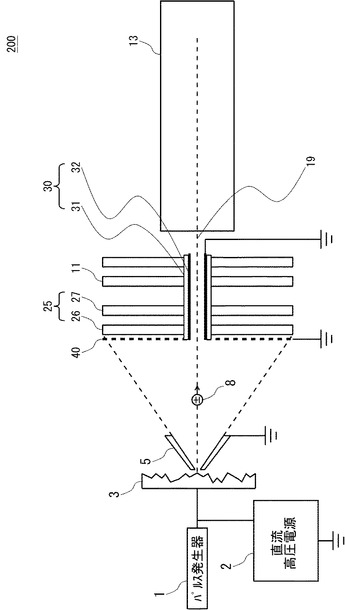
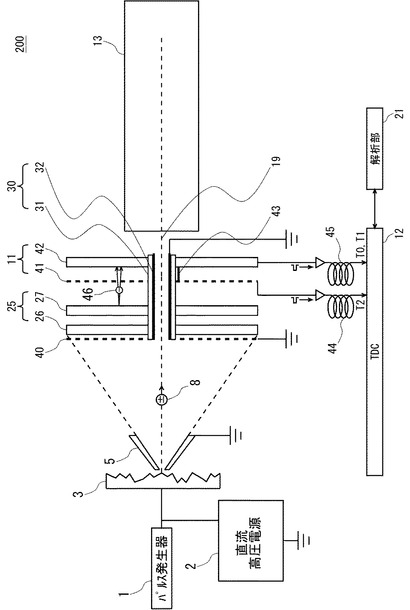
図3は、実施の形態に係る走査型アトムプローブの全体構成の別の例を示す図である。図3は、図を見やすくするために一部の構成を省略しているが、基本的な構成は図2に示した走査型アトムプローブ200と同様である。図3に示した走査型アトムプローブ200は、図2に示した走査型アトムプローブ200の構成に加えて、位置感知型イオン検出器11の貫通孔19に設けられた中空管30と、位置感知型イオン検出器11の試料3側に設けられたシールド板40を更に備える。
【0041】
図2にも示したように、位置感知型イオン検出器11の前段、すなわち試料3側には、試料3から脱離したイオン8を位置感知型イオン検出器11が検出できるように、イオン8の入射を契機として2次電子を次々と発生させ増幅する電子増倍板25が設けられている。本実施の形態では、2段のチャネルプレート26及び27を用いて電子増倍板25を構成している。試料3に近い1段目のチャネルプレート26の入射側は接地され、出射側は約+1kVの電圧が印加される。また、2段目のチャネルプレート27の入射側は約+1kV、出射側は約+2kVの電圧が印加される。また、位置感知型イオン検出器11の入射側は、+2kVよりも更に高い電圧が印加される。したがって、電子増倍板25と位置感知型イオン検出器11に設けられた貫通孔19を通過するイオンは、電子増倍板25と位置感知型イオン検出器11により発生された電界の影響を受ける。なお、チャネルプレート26及び27と位置感知型イオン検出器11に印加する電圧は、1段目のチャネルプレート26の入射側を約−2kV、出射側を約−1kV、2段目のチャネルプレート27の入射側を約−1kV、出射側を約0kVとしてもよい。この場合、位置感知型イオン検出器11の入射側を接地することになるので、位置感知型イオン検出器11からの信号を処理しやすいという利点がある。
【0042】
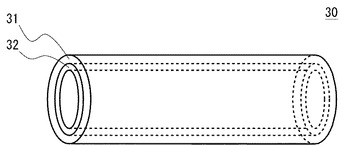
図3に示した構成例では、このような電界の影響を最小限に抑えるために、貫通孔19に中空管30を設ける。中空管30の内側には、中空管30の外部の電界を遮断するために、接地された導電層32が設けられ、中空管30の外側には、導電層32と電子増倍板25及び位置感知型イオン検出器11とを電気的に絶縁するための絶縁層31が設けられる。これにより、中空管30の内部の電界をほぼゼロとすることができ、電界によりイオンの飛行軌跡が曲がったり、イオンが不必要に加速されたりすることを防ぐことができる。したがって、イオンの検出精度を向上させることができる。
【0043】
試料3を脱離して、引出電極5から電子増倍板25に至るまでの空間を飛行するイオンも、電子増倍板25と位置感知型イオン検出器11により発生された電界の影響を受ける。図3に示した構成例では、このような電界の影響を最小限に抑えるために、シールド板40を設ける。シールド板40は、接地された導電体により構成されるが、飛行するイオンがシールド板40を通過して電子増倍板25に入射することができるように、多数の貫通孔が設けられている。これにより、イオンが引出電極5から電子増倍板25に至るまでの空間を飛行しているときに、電界により飛行軌跡が曲がったり、イオンが不必要に加速されたりすることを防ぎ、イオンの検出精度を向上させることができる。
【0044】
図4は、中空管の構成を示す。中空管30は、外側の絶縁層31と、内側の導電層32を含む。中空管30は、例えば、石英などの絶縁体の管の内側に、金、銀、銅などの金属メッキを施すなどして導電層32を形成したものであってもよい。
【0045】
図5は、図3に示した構成例を模式的に示す図である。本図も、図を見やすくするために一部の構成を省略している。シールド板40は、例えば、金属などの導電材料をメッシュ状に編んだものであってもよい。シールド板40は、電子増倍板25及び位置感知型イオン検出器11により発生される電界を適切に遮断するために、電子増倍板25の表面の90%以上を接地された導電材料で覆うものであることが好ましい。
【0046】
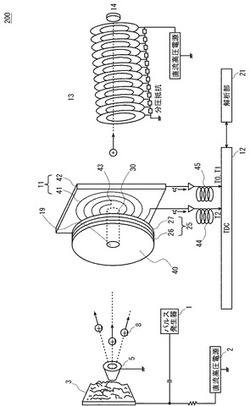
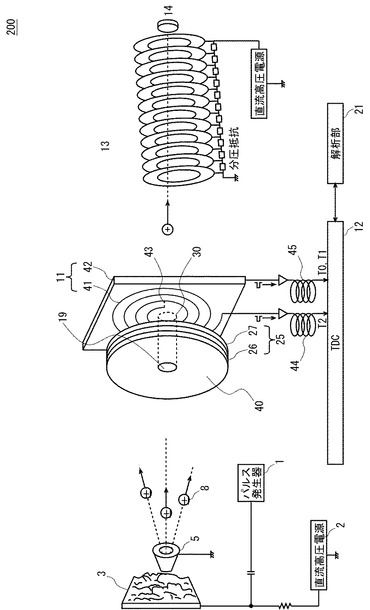
図6及び図7は、実施の形態に係る走査型アトムプローブの全体構成の更に別の例を示す図である。図6及び図7も、図を見やすくするために一部の構成を省略しているが、基本的な構成は図3及び図5に示した走査型アトムプローブ200と同様である。図3及び図5に示した走査型アトムプローブ200の位置感知型イオン検出器11は、イオンの入射位置を検知するために、櫛歯状に折れ曲がった直交する2本の遅延回路線を有しており、これらの2本の遅延回路線の両端から出力される4つの信号を用いて、粒子が入射した位置と、その粒子が試料から電界蒸発して位置感知型イオン検出器11に到達するまでの飛行時間とが算出される。これに対して、図6及び図7に示した走査型アトムプローブ200の位置感知型イオン検出器11は、1本の螺旋状の遅延回路線41と、導電板42とを備える。
【0047】
上述したように、位置感知型イオン検出器11の前段に設けられた電子増倍板25に、試料3から脱離した粒子が入射すると、入射粒子数の数億倍からそれ以上の電子46が背後に放出される。これらの電子46の一部は、電子増倍板25の背後に設けられた遅延回路線41に入射し、線間を通り抜けた他の電子46は、更に背後に設けられた導電板42に入射する。導電板42に直接入射した電子46は、回路45を介して検出される。このときの時刻をT0とする。
【0048】
遅延回路線41は、電子増倍板25に平行な平面上に設けられており、中空管30が挿設される貫通孔19の近傍から周縁へ螺旋状に伸びている。遅延回路線41に入射した電子46の一部は、入射した位置から内側に向かって遅延回路線41を流れ、遅延回路線41の内側の端に到達すると、遅延回路線41と導電板42との接点43を介して導電板42に流れ、回路45を介して検出される。このときの時刻をT1とする。また、遅延回路線41に入射した他の電子46は、入射した位置から外側に向かって遅延回路線41を流れ、遅延回路線41の外側の端に到達すると、回路44を介して検出される。このときの時刻をT2とする。
【0049】
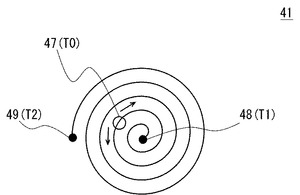
説明を分かりやすくするために、導電板42、回路44、回路45を信号が伝達する時間や、遅延回路線41を通り抜けた電子が導電板42に入射するまでに要する時間を無視すると、図8に示すように、電子46が入射位置47に入射した時刻がT0であり、入射した電子46が遅延回路線41の内側の端48で検出される時刻がT1であり、入射した電子46が遅延回路線41の外側の端49で検出される時刻がT2である。したがって、(T1−T0)を算出することにより、内側の端48と入射位置47との間の距離が分かり、(T2−T0)を算出することにより、外側の端49と入射位置47との間の距離が分かる。T1とT2のいずれか一方が分かれば入射位置47を算出することは可能であるが、(T1−T0)+(T2−T0)=(T1+T2−2T0)は、遅延回路線41の両端間を信号が伝達する時間であり一定であるという関係があるので、T1とT2の両者を測定することにより、測定の精度を向上させることができる。
【0050】
タイマー12は、パルス発生器1によりパルスが発生された時刻Tと、上述した時刻T0、T1、T2を検出して解析部21に伝達する。解析部21は、それらの時刻を用いて、粒子の入射位置47と、その粒子が試料から離脱して位置感知型イオン検出器11に到達するまでの飛行時間とを算出する。解析部21は、算出した飛行時間を用いて、入射した粒子の質量と荷電数の比を更に算出してもよい。上述した、導電板42、回路44、回路45を信号が伝達する時間や、遅延回路線41を通り抜けた電子が導電板42に入射するまでに要する時間は一定であるから、解析部21は、これらの時間を定数として予め保持しておき、入射位置や飛行時間の算出に利用してもよい。
【0051】
複数の粒子が試料から離脱して電子増倍板25に入射した場合であっても、上述したように、T1+T2−2T0は一定であるという関係があるので、解析部21は、T1+T2−2T0が所定の定数になるという条件を満たすT0、T1、T2の組合せを検出することにより、それぞれの粒子の入射に起因する信号を分離し、それぞれの粒子について入射位置と飛行時間を算出することができる。
【0052】
なお、図7では、遅延回路線41と導電板42とを空間的に分離して描いているが、製造を容易にする観点から、遅延回路線41は絶縁層を介して導電板42と一体的に構成されてもよい。この場合であっても、電子増倍板25から放射された電子を、遅延回路線41と導電板42の両者に入射させるために、遅延回路線41が導電板42に接する部分にのみ絶縁層を設け、それ以外の部分は電子が直接導電板42に入射できるようにしておく。
【0053】
このような構成によれば、より少ない信号数で入射位置と飛行時間を算出することができるので、回路の構成を簡易にすることができるとともに、解析を容易にすることができる。また、貫通孔19を有し、中空管30を挿設可能な位置感知型イオン検出器11の作製を容易にすることができる。遅延回路線41として、螺旋状の形状を有する例を示したが、中央付近に設けられる貫通孔19を除く、電子増倍板25から放出された電子が通過する可能性のある領域が実質的にカバーされ、かつ交差しないように設けられていれば、いかなる形状を有していてもよい。
【0054】
なお、電子増倍板25から放射される2次電子群は、多少の広がりをもって位置感知型イオン検出器11に入射するので、遅延回路線41の間隔が狭い場合、1つの粒子の入射に起因する2次電子が、遅延回路線41の隣接する複数の異なる位置に入射する可能性があるが、その場合であっても、上述したように、T1+T2−2T0が所定の定数になるという条件を利用して信号を分離することができる。逆に、遅延回路線41の間隔が広い場合、電子増倍板25から放射された全ての電子が遅延回路線41の線間を通過する可能性があるが、このような事態を低減するために、電子増倍板25から放射される2次電子群の放射角を考慮して、イオンが電子増倍板25に入射したときに放出される電子の少なくとも一部が必ず遅延回路線41に入射するように、遅延回路線41の間隔や、電子増倍板25と位置感知型イオン検出器11との間の距離などを設計するのが望ましい。
【図面の簡単な説明】
【0055】
【図1】前提技術に係る走査型アトムプローブの全体構成を示す図である。
【図2】実施の形態に係る走査型アトムプローブの全体構成を模式的に示す図である。
【図3】実施の形態に係る走査型アトムプローブの全体構成の別の例を示す図である。
【図4】中空管の構成を示す図である。
【図5】図3に示した構成例を模式的に示す図である。
【図6】実施の形態に係る走査型アトムプローブの全体構成の更に別の例を示す図である。
【図7】実施の形態に係る走査型アトムプローブの全体構成の更に別の例を示す図である。
【図8】実施の形態に係る遅延回路線の例を示す図である。
【符号の説明】
【0056】
1 パルス発生器、2 直流高圧電源、3 試料、4 探針、5 引出電極、9 スクリーン、10 探査穴、11 位置感知型イオン検出器、12 タイマー、13 リフレクトロン型質量分析器、19 貫通孔、20 表面形状分析部、21 解析部、25 電子増倍板、30 中空管、31 絶縁層、32 導電層、40 シールド板、41 遅延回路線、42 導電板、43 接点、100,200 走査型アトムプローブ。
【技術分野】
【0001】
本発明は、試料を分析する技術に関し、とくに、試料表面を原子レベルの分解能で分析可能な分析装置及び分析方法に関する。
【背景技術】
【0002】
試料の表面を原子レベルで分析するための装置に、本発明者が開発した走査型アトムプローブ(Scanning Atom Probe:以下、「SAP」とも表記する)がある(特許文献1参照)。SAPは、漏斗型の微細な引出電極を備えており、この引出電極により平面状の試料を面に沿って走査する。試料面上に数μmの凹凸があり、その突起の先端の位置に引出電極の先端の穴が合うと、先端と穴との間の微細な空間に発生した高電界が、突起先端の原子を電界蒸発させる。このように、試料を表面から個々の原子又は原子団を陽イオンとして電界蒸発させたときに、蒸発した陽イオンを質量分析器に導入して分析することにより、蒸発領域の組成分布を原子レベルの分解能で解明できる。
【特許文献1】特開平7−43373号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
SAPの開発により、分析可能な試料の幅は飛躍的に広がった。この優れた機能を有する装置が、より多くの研究者に利用され、素晴らしい研究成果を導き出すために、本発明者は、SAPのさらなる改良に努力を重ねている。とくに、有機物を分析対象とする場合は、陽イオンを精確に同定するために、高い質量分析能が必要となるので、より分析精度の高いSAPの開発が求められている。
【0004】
本発明は、こうした現状に鑑みてなされたものであり、その目的は、より分析精度の高い分析装置を提供することにある。
【課題を解決するための手段】
【0005】
本発明のある態様は、分析装置に関する。この分析装置は、試料の表面を走査する電極と、前記試料に電圧を供給する電圧供給部と、前記電圧供給部により供給された電圧により前記電極と前記試料の間に生じた電界によって、前記試料の表面の原子又は原子団を前記試料から脱離させたときに、脱離した粒子を検出する粒子検出部と、を備え、前記粒子検出部は、前記粒子の入射により電子を放出する電子増倍板と、前記電子増倍板の後方に設けられ、前記電子増倍板から放出された電子の一部が入射する螺旋状の遅延回路線と、前記遅延回路線の後方に設けられ、前記電子増倍板から放出された電子のうち、前記遅延回路線の線間を通過した電子が入射する導電板と、を含むことを特徴とする。
【0006】
本発明の別の態様も、分析装置に関する。この分析装置は、試料の表面を走査する電極と、前記試料に電圧を供給する電圧供給部と、前記電圧供給部により供給された電圧により前記電極と前記試料の間に生じた電界によって、前記試料の表面の原子又は原子団を前記試料から脱離させたときに、脱離した粒子を検出する粒子検出部と、を備え、前記粒子検出部は、前記粒子の入射により電子を放出する電子増倍板と、前記電子増倍板の後方に設けられ、前記電子増倍板から放出された電子が通過する可能性のある領域に、前記粒子が前記電子増倍板に入射したときに放出される電子の少なくとも一部が必ず入射するような間隔で交差しないように設けられた一本の遅延回路線と、前記遅延回路線の後方に設けられ、前記電子増倍板から放出された電子のうち、前記遅延回路線の線間を通過した電子が入射する導電板と、を含むことを特徴とする。
【0007】
前記遅延回路線は、前記電子増倍板に平行な平面上に設けられてもよい。
【0008】
分析装置は、前記遅延回路線の一端から電子が検出された時刻と、前記導電板から電子が検出された時刻の差を用いて、前記遅延回路線における前記電子の入射位置を算出することにより、前記粒子の入射位置を算出する解析部を更に備えてもよい。
【0009】
前記解析部は、複数の粒子が前記試料の表面から脱離して前記電子増倍板に入射した場合に、それぞれの粒子が前記電子増倍板に入射したときに前記電子増倍板から放射された電子について、前記遅延回路線の一端から電子が検出された時刻T1と前記導電板から電子が検出された時刻T0の差と、前記遅延回路線の他端から電子が検出された時刻T2と前記導電板から電子が検出された時刻T0の差との和T1+T2−2T0が一定であることを利用して、前記和が所定の定数となるT0、T1、T2の組合せを検出することにより、それぞれの粒子の入射位置を算出してもよい。
【0010】
前記遅延回路線の一端は前記導電板に接続されてもよく、前記遅延回路線の一端に到達した電子は、前記導電板を介して検出されてもよい。
【0011】
分析装置は、前記粒子検出部の後方に設けられ、前記粒子検出部よりも高い分解能で粒子の質量を分析することが可能な質量分析部を更に備えてもよく、前記粒子検出部は、前記試料の表面から脱離された粒子の少なくとも一部を通過させるための貫通孔を有してもよく、前記質量分析部は、前記貫通孔を通過した粒子の質量を分析してもよい。
【0012】
分析装置は、前記貫通孔に設けられ、前記貫通孔の外部の電界を遮断する中空管を更に備えてもよい。
【0013】
本発明の更に別の態様は、分析方法に関する。この分析方法は、試料に電圧を供給するステップと、前記試料の表面の原子又は原子団を前記電圧により脱離させるステップと、脱離した粒子を電子増倍板に入射させるステップと、前記粒子の入射により前記電子増倍板から放出された電子の一部が、螺旋状の遅延回路線に入射してから前記遅延回路線の一端に到達するまでの時間を算出するステップと、算出された時間から前記粒子の入射位置を算出するステップと、を含むことを特徴とする。
【0014】
なお、以上の構成要素の任意の組合せ、本発明の表現を方法、装置、システムなどの間で変換したものもまた、本発明の態様として有効である。
【発明の効果】
【0015】
本発明によれば、分析装置の精度を向上させることができる。
【発明を実施するための最良の形態】
【0016】
(前提技術)
まず、前提技術として、走査型アトムプローブについて説明する。図1は、分析装置の一例である走査型アトムプローブの全体構成を示す図である。走査型アトムプローブ100は、主に、試料に電圧を供給するパルス発生器1および直流高圧電源2、試料3の表面を走査する漏斗型の引出電極5、引出電極5と交換可能に設けられた探針4、試料3から電界放射された電子による像を投影するスクリーン9、引出電極5に入射した電子の電流値を測定する第1の電流計6a、スクリーン9に入射した電子の電流値を測定する第2の電流計6b、試料3の表面にパルスレーザー光を照射するレーザー7、試料3から電界蒸発した陽イオンを検出する位置感知型イオン検出器11、試料3から電界蒸発した陽イオンの質量を分析するリフレクトロン型質量分析器13、イオンの飛行時間を測定するタイマー12、および探針4により試料3の表面形状を分析する表面形状分析部20を備える。
【0017】
この走査型アトムプローブによる試料の分析方法の手順を説明する。まず、試料3に直流高圧電源2から直流バイアス電圧を印加しつつ、接地された引出電極5により試料3の表面を走査し、微細な突起3aを探索する。試料3の表面が研磨されて平坦になっている場合は、ダイシングカッターにより碁盤目状に溝を入れてもよい。溝の深さおよび間隔は、10μm以下であることが好ましい。溝になっていない部分が分析領域となる。試料の腐食効果を研究するために、試料を腐食液またはガス内に置いた後、分析を行ってもよい。腐食領域はくぼむため、分析される領域、すなわちくぼんでいない領域が腐食に強い領域であることが分かる。
【0018】
引出電極5の先端を試料表面に近づけ、試料3に負電圧を印加すると、試料表面の突起3aと引出電極5の穴との間の微細な空間に負の高電界が発生し、突起3aの先端部分から電子が電界放射される。引出電極5の先端の穴5aの中心が、ちょうど突起3aの先端部分の直上にあるときは、ほぼ全ての放射電子8がスクリーン9に向かって飛行し、突起表面をスクリーン9に拡大投影する。このとき、第2の電流計6bに流れる電流は最大となる。引出電極5の先端の穴5aが突起3aの先端部分からずれると、ほぼ全ての放射電子が引出電極5に向かい、第1の電流計6aにより電流が観測される。このとき、第2の電流計6bに流れる電流は減少する。このように、引出電極5が試料3の表面を走査するとき、第1の電流計6aおよび第2の電流計6bにおいて測定される、電界放射された電子による電流は、試料表面の形状を反映して変化する。この現象を利用して、分析すべき突起3aの先端の位置を推測し、その位置に引出電極5の位置を合わせることができる。
【0019】
引出電極5の位置を試料3の突起3aの先端に合わせる別の方法は、走査型トンネル顕微鏡(Scanning Tunneling Microscope:以下、「STM」とも表記する)、原子間力顕微鏡(Atomic Force Microscope:以下、「AFM」とも表記する)、または走査型プローブ顕微鏡(Scanning Probe Microscope:以下、「SPM」とも表記する)の技術を利用する。図1および図2に示した例においては、SAP100は、引出電極5と交換可能に設けられた探針4を備える。試料が導電性材料の場合は、表面形状分析部20としてSTMを、探針4としてSTM用の探針を用い、試料が絶縁性材料の場合は、表面形状分析部20としてAFMを、探針4としてAFM用の探針を用いればよい。
【0020】
引出電極5と探針4を交換し、探針4で試料表面を走査して、表面形状分析部20により試料表面の形状を描写する。探針4により、試料表面の形状のみならず、SAP100により質量分析される突起先端の表面の原子配列も描写される。表面形状を描写した後、引出電極5を所望の突起の直上に位置合わせする。この方法によれば、試料表面の形状および原子配列を取得してから、所望の領域を選択し、一層ごとに質量分析を行うことができるので、分析領域の原子配列と組成との相関関係を知ることができる。
【0021】
引出電極5を表面形状分析部20の探針4として用いてもよい。この場合、引出電極5の先端に、探針4として機能する突起を設けてもよい(例えば、本発明者らによる米国特許第6,797,952号参照)。
【0022】
引出電極5の先端の穴5aの中心と、試料3の突起3aの先端とを位置合わせした後、直流高圧電源2から負のバイアス電圧を試料3に印加し、突起3aの先端から電子を電界放射させる。放射電子8はスクリーン9に入射し、その放射電子による電流値が第2の電流計6bにより測定される。負のバイアス電圧値を変化させて、バイアス電圧値に対する電流値の変化(I−Vプロット)を測定する。これにより、分析領域の電子状態を知ることができる。
【0023】
つづいて、正の直流バイアス電圧を試料3に印加し、それに重畳させて、パルス発生器1により正のパルス電圧を印加する。直流バイアス電圧とパルス電圧の総和が十分に高いと、突起3aの先端部分の表面原子が電界蒸発して陽イオン8となり、放射電子8とほぼ同じ軌跡を描いてスクリーン9に入射する。試料3が絶縁性材料または半導体材料のような導電性の低い材料である場合は、パルス電圧が効率よく突起3aの先端まで伝わらないので、直流電圧が印加されている試料3に、レーザー7によりパルスレーザー光7aを照射し、光励起電界蒸発により表面原子を陽イオンとして脱離させる。これにより、従来のAPでは測定に適さないとされていた低電導性材料であっても、導電性材料と同様に分析することができる。
【0024】
電界蒸発した全ての陽イオン8を質量分析するために、スクリーン9を取り外し、陽イオン8を位置感知型イオン検出器11に入射させる。位置感知型イオン検出器11としては、たとえば、米国特許第5,644,128号に開示された装置が好適である。突起3aから位置感知型イオン検出器11までの陽イオン8の飛行時間は、タイマー12により計測される。タイマー12は、パルス発生器1から開始信号を受けて計測を開始し、位置感知型イオン検出器11からの信号で計測を停止することにより、陽イオン8の飛行時間を計測する。検出されたイオンの質量と電荷との比は、イオンの飛行時間、試料3に印加された電圧値の総和、および試料表面から位置感知型イオン検出器11までの飛行経路により得られる。位置感知型イオン検出器11の入射位置と、電界蒸発する前の原子の位置とは一対一に対応しており、電界蒸発により一層ずつ原子を蒸発させて検出することができるので、分析領域を構成する原子の3次元的な配置を得ることができる。たとえば、一辺が40mmで、位置分解能が0.5mmの位置感知型イオン検出器11を用いた場合、80原子×80原子の領域が分析できることになるが、深さ方向に100原子層分析すると、64万個の原子の立体的な組成分布が得られることになる。
【0025】
飛行時間計測型の質量分析器では、質量の分解能は、イオンの飛行時間計測の正確さに依存する。タイマー12の時間分解能には限界があるので、質量分解能を向上させるには、イオンの飛行経路を長くすることが好ましい。すなわち、飛行経路が長いほど、質量分解能が向上する。本実施の形態のSAP100では、高い質量分解能を実現するために、リフレクトロン型質量分析器13を用いている。分析領域の高分解能質量分析を行うために、位置感知型イオン検出器11を取り外し、スクリーン9を元の位置に戻す。
【0026】
突起3aの先端から電子を電界放射させて、電子状態を反映した像をスクリーン9に投影する。スクリーン9の探査穴10に所望の分析領域の像があるときに、パルス電圧またはパルスレーザー光を試料3に印加して、表面原子を電界蒸発させる。分析領域から電界蒸発した陽イオンは、探査穴10を通り抜けて、リフレクトロン型質量分析器13の飛行空間に入射する。リフレクトロン型質量分析器13は、直線飛行経路の末端に設けられた第1のイオン検出器14と、入射口側に設けられた第2のイオン検出器15を備える。第1のイオン検出器14は、電界蒸発の後に中性化された原子を検出できる。第2のイオン検出器15は、高い質量分解能でイオンを検出できる。第1のイオン検出器14および第2のイオン検出器15によりイオンが検出されたとき、その信号がタイマーに送られ、イオンの飛行時間が計測される。リフレクトロン型質量分析器13により分析される試料面上の領域は、位置感知型イオン検出器11よりも狭く、たとえば直径数nm程度であるが、位置感知型イオン検出器11よりも高い精度でイオンの質量を分析することができるので、用途に応じて、いずれを用いるかを適宜選択すればよい。
【0027】
本前提技術の走査型アトムプローブ100によれば、以下に列記するような優れた効果が得られる。
1)引出電極5を導入したことにより、試料を針状にする必要がなく、平面状の試料であっても、表面に数μm程度の凹凸があれば分析可能である。
2)試料が平面状であるため、パルスレーザー光の照射が容易であり、光励起電界蒸発を利用して、半絶縁性材料も分析可能である。
3)分析速度とデータ処理能力を向上させることにより、ppmからppb以上の微量分析が可能である。
4)電界放射のI−V特性により、分析領域の電子状態の解明が可能である。
5)電界蒸発の際に、弱い結合ほど切れやすいので、イオン種の統計分布から結合状態を知ることが可能である。
【0028】
また、SAPの利点を、二次イオン質量分析器(SIMS)およびオージェ電子分光器(AES)との比較により列記する。
1)SAPの分解能は、深さ方向では1原子層、横方向では原子レベルであり、組成の3次元分布を原子レベルの高分解能で得ることも可能である。
2)イオン検出器の検出感度は全ての原子、分子について同等であり、AESでは検出できない水素も検出可能である。
3)検出イオン種、とくにクラスターの検出により、試料内部の結合状態の解明が可能である。
4)分析領域からの電界放射電流のI−V特性により、電子状態と組成との関連性を究明することが可能である。
5)検出原子数を増やすことにより、ppmからppb以上の微量分析が可能である。
【0029】
(実施の形態)
上述したように、前提技術の走査型アトムプローブ100は、試料の表面から1原子層ずつ電界蒸発させてイオンを同定していくことにより、試料の組成分布を立体的に分析することが可能である。このとき、イオン検出器として位置感知型イオン検出器11を用いる場合は、質量分解能ではリフレクトロン型質量分析器13に劣るものの、広い領域の組成分布を立体的に取得することができるという利点がある。他方、リフレクトロン型質量分析器13を用いる場合は、分析範囲は位置感知型イオン検出器11よりも狭いものの、深さ方向の組成の変化を高質量分解能で取得できるという利点がある。
【0030】
しかし、前提技術で説明した走査型アトムプローブ100は、位置感知型イオン検出器11とリフレクトロン型質量分析器13の双方を有しているが、両者を同時に作動させて同一領域を分析する事はできない。位置感知型イオン検出器11を用いて3次元的な組成分布を分析する場合には、リフレクトロン型質量分析器13にはイオンが導入されないので高分解能の質量分析はできない。また、移動可能に設けられた位置感知型イオン検出器11を横方向にずらし、リフレクトロン型質量分析器13により高分解能の質量分析を行う場合には、位置感知型イオン検出器11にはイオンが導入されないので広い範囲の3次元的な組成分布は得られない。
【0031】
同一試料について、位置感知型イオン検出器11を移動しつつ、ある領域は位置感知型イオン検出器11により、別の領域はリフレクトロン型質量分析器13により分析することも可能ではあるが、この場合、それぞれのイオン検出器は深さの異なる領域を分析することになってしまう。その上、位置感知型イオン検出器11の位置を変えるには、遅延回路などを含む超高周波数の複数の導線を大きく撓ませなければならないので、移動させるたびにインピーダンスなどを調整する必要があり、実験に要する時間が長くなってしまう上に、実験精度を保つのは容易ではない。
【0032】
別の例として、位置感知型イオン検出器11を図2のDRの位置に置き、質量分解能を向上させることもできる。しかし、この場合は、リフレクトロン型質量分析器13への入射口が大きく、奥行きが浅いので、分解能はそれ程高くない。また、位置感知型イオン検出器11に映し出される像が歪むので、その補正も困難である。
【0033】
更に別の例として、位置感知型イオン検出器11とリフレクトロン型質量分析器13を横に並置し、試料3を回転させることにより、双方のイオン検出器へイオンを導入することもできる。しかし、この場合は、試料の同じ領域を分析するための位置合わせが非常に困難である。
【0034】
そこで、本実施の形態では、両者を同時に作動させ、同時に電界蒸発したイオンの一部をリフレクトロン型質量分析器13で精密に質量分析しつつ、他のイオンを位置感知型イオン検出器11で分析する技術を提案する。
【0035】
図2は、実施の形態に係る分析装置の一例である走査型アトムプローブ200の構成を示す。図2に示した走査型アトムプローブ200では、図1に示した前提技術の走査型アトムプローブ100の構成に比べて、電子増倍板及び位置感知型イオン検出器11の中央付近に、イオンを後方へ通過させるための貫通孔19が設けられている。その他の構成及び動作は、前提技術と同様である。
【0036】
試料表面の原子を、電界又は光照射などによりイオン化させたとき、イオン8は、試料3と引出電極5との間の電界により加速されて飛行する。位置感知型イオン検出器11とリフレクトロン型質量分析器13は、イオン8の飛行方向に対して直列に設けられているので、同じ領域から同時にイオン化されて引出電極5を通過した複数のイオンのうち、領域の中央付近からイオン化したイオンは、電子増倍板及び位置感知型イオン検出器11の貫通孔19を通過してリフレクトロン型質量分析器13へ導入され、それ以外のイオンは、位置感知型イオン検出器11へ導入される。
【0037】
リフレクトロン型質量分析器13へ導入されたイオンは、高質量分解能で分析同定され、より精確な質量が求められる。解析部21は、リフレクトロン型質量分析器13により検出されたイオンの質量を取得して、位置感知型イオン検出器11で検出されたイオンを同定するときに参照する。これにより、3次元的な組成分布の分析精度を格段に向上させることができる。
【0038】
試料が有機物である場合、複数原子からなるクラスターイオンが検出されるが、これらのイオンは多数の水素原子や炭素原子を含んでおり、質量数も大きい。したがって、このようなクラスターイオンを正確に同定するには、高い質量分解能が求められる。解析部21は、位置感知型イオン検出器11で検出されたイオンのうち、質量数が不明確なイオンについては、リフレクトロン型質量分析器13で検出されたほぼ同質量のイオンと比較対照することにより、それらのイオンの精確な質量を割り出す。これにより、試料が有機物であっても、精確な3次元の組成分布を分析することができる。
【0039】
位置感知型イオン検出器11に導入されるイオンと、リフレクトロン型質量分析器13に導入されるイオンは、同じ領域の同じ層からほぼ同時にイオン化したイオンであるから、組成などが類似していると考えられる。したがって、それらの一部の精確な質量分析結果を参照することにより、位置感知型イオン検出器11により検出されるイオンの分析精度が格段に向上することが期待できる。また、試料表面からイオン化したクラスターイオンを精確に同定することにより、試料表面の結合状態や結晶構造などを推定することができる。また、装置の各構成を移動させることなく、同時に位置感知型イオン検出器11とリフレクトロン型質量分析器13の双方による分析が可能となるので、実験に要する時間を飛躍的に短縮することができ、実験環境を均一に保つことができる。
【0040】
図3は、実施の形態に係る走査型アトムプローブの全体構成の別の例を示す図である。図3は、図を見やすくするために一部の構成を省略しているが、基本的な構成は図2に示した走査型アトムプローブ200と同様である。図3に示した走査型アトムプローブ200は、図2に示した走査型アトムプローブ200の構成に加えて、位置感知型イオン検出器11の貫通孔19に設けられた中空管30と、位置感知型イオン検出器11の試料3側に設けられたシールド板40を更に備える。
【0041】
図2にも示したように、位置感知型イオン検出器11の前段、すなわち試料3側には、試料3から脱離したイオン8を位置感知型イオン検出器11が検出できるように、イオン8の入射を契機として2次電子を次々と発生させ増幅する電子増倍板25が設けられている。本実施の形態では、2段のチャネルプレート26及び27を用いて電子増倍板25を構成している。試料3に近い1段目のチャネルプレート26の入射側は接地され、出射側は約+1kVの電圧が印加される。また、2段目のチャネルプレート27の入射側は約+1kV、出射側は約+2kVの電圧が印加される。また、位置感知型イオン検出器11の入射側は、+2kVよりも更に高い電圧が印加される。したがって、電子増倍板25と位置感知型イオン検出器11に設けられた貫通孔19を通過するイオンは、電子増倍板25と位置感知型イオン検出器11により発生された電界の影響を受ける。なお、チャネルプレート26及び27と位置感知型イオン検出器11に印加する電圧は、1段目のチャネルプレート26の入射側を約−2kV、出射側を約−1kV、2段目のチャネルプレート27の入射側を約−1kV、出射側を約0kVとしてもよい。この場合、位置感知型イオン検出器11の入射側を接地することになるので、位置感知型イオン検出器11からの信号を処理しやすいという利点がある。
【0042】
図3に示した構成例では、このような電界の影響を最小限に抑えるために、貫通孔19に中空管30を設ける。中空管30の内側には、中空管30の外部の電界を遮断するために、接地された導電層32が設けられ、中空管30の外側には、導電層32と電子増倍板25及び位置感知型イオン検出器11とを電気的に絶縁するための絶縁層31が設けられる。これにより、中空管30の内部の電界をほぼゼロとすることができ、電界によりイオンの飛行軌跡が曲がったり、イオンが不必要に加速されたりすることを防ぐことができる。したがって、イオンの検出精度を向上させることができる。
【0043】
試料3を脱離して、引出電極5から電子増倍板25に至るまでの空間を飛行するイオンも、電子増倍板25と位置感知型イオン検出器11により発生された電界の影響を受ける。図3に示した構成例では、このような電界の影響を最小限に抑えるために、シールド板40を設ける。シールド板40は、接地された導電体により構成されるが、飛行するイオンがシールド板40を通過して電子増倍板25に入射することができるように、多数の貫通孔が設けられている。これにより、イオンが引出電極5から電子増倍板25に至るまでの空間を飛行しているときに、電界により飛行軌跡が曲がったり、イオンが不必要に加速されたりすることを防ぎ、イオンの検出精度を向上させることができる。
【0044】
図4は、中空管の構成を示す。中空管30は、外側の絶縁層31と、内側の導電層32を含む。中空管30は、例えば、石英などの絶縁体の管の内側に、金、銀、銅などの金属メッキを施すなどして導電層32を形成したものであってもよい。
【0045】
図5は、図3に示した構成例を模式的に示す図である。本図も、図を見やすくするために一部の構成を省略している。シールド板40は、例えば、金属などの導電材料をメッシュ状に編んだものであってもよい。シールド板40は、電子増倍板25及び位置感知型イオン検出器11により発生される電界を適切に遮断するために、電子増倍板25の表面の90%以上を接地された導電材料で覆うものであることが好ましい。
【0046】
図6及び図7は、実施の形態に係る走査型アトムプローブの全体構成の更に別の例を示す図である。図6及び図7も、図を見やすくするために一部の構成を省略しているが、基本的な構成は図3及び図5に示した走査型アトムプローブ200と同様である。図3及び図5に示した走査型アトムプローブ200の位置感知型イオン検出器11は、イオンの入射位置を検知するために、櫛歯状に折れ曲がった直交する2本の遅延回路線を有しており、これらの2本の遅延回路線の両端から出力される4つの信号を用いて、粒子が入射した位置と、その粒子が試料から電界蒸発して位置感知型イオン検出器11に到達するまでの飛行時間とが算出される。これに対して、図6及び図7に示した走査型アトムプローブ200の位置感知型イオン検出器11は、1本の螺旋状の遅延回路線41と、導電板42とを備える。
【0047】
上述したように、位置感知型イオン検出器11の前段に設けられた電子増倍板25に、試料3から脱離した粒子が入射すると、入射粒子数の数億倍からそれ以上の電子46が背後に放出される。これらの電子46の一部は、電子増倍板25の背後に設けられた遅延回路線41に入射し、線間を通り抜けた他の電子46は、更に背後に設けられた導電板42に入射する。導電板42に直接入射した電子46は、回路45を介して検出される。このときの時刻をT0とする。
【0048】
遅延回路線41は、電子増倍板25に平行な平面上に設けられており、中空管30が挿設される貫通孔19の近傍から周縁へ螺旋状に伸びている。遅延回路線41に入射した電子46の一部は、入射した位置から内側に向かって遅延回路線41を流れ、遅延回路線41の内側の端に到達すると、遅延回路線41と導電板42との接点43を介して導電板42に流れ、回路45を介して検出される。このときの時刻をT1とする。また、遅延回路線41に入射した他の電子46は、入射した位置から外側に向かって遅延回路線41を流れ、遅延回路線41の外側の端に到達すると、回路44を介して検出される。このときの時刻をT2とする。
【0049】
説明を分かりやすくするために、導電板42、回路44、回路45を信号が伝達する時間や、遅延回路線41を通り抜けた電子が導電板42に入射するまでに要する時間を無視すると、図8に示すように、電子46が入射位置47に入射した時刻がT0であり、入射した電子46が遅延回路線41の内側の端48で検出される時刻がT1であり、入射した電子46が遅延回路線41の外側の端49で検出される時刻がT2である。したがって、(T1−T0)を算出することにより、内側の端48と入射位置47との間の距離が分かり、(T2−T0)を算出することにより、外側の端49と入射位置47との間の距離が分かる。T1とT2のいずれか一方が分かれば入射位置47を算出することは可能であるが、(T1−T0)+(T2−T0)=(T1+T2−2T0)は、遅延回路線41の両端間を信号が伝達する時間であり一定であるという関係があるので、T1とT2の両者を測定することにより、測定の精度を向上させることができる。
【0050】
タイマー12は、パルス発生器1によりパルスが発生された時刻Tと、上述した時刻T0、T1、T2を検出して解析部21に伝達する。解析部21は、それらの時刻を用いて、粒子の入射位置47と、その粒子が試料から離脱して位置感知型イオン検出器11に到達するまでの飛行時間とを算出する。解析部21は、算出した飛行時間を用いて、入射した粒子の質量と荷電数の比を更に算出してもよい。上述した、導電板42、回路44、回路45を信号が伝達する時間や、遅延回路線41を通り抜けた電子が導電板42に入射するまでに要する時間は一定であるから、解析部21は、これらの時間を定数として予め保持しておき、入射位置や飛行時間の算出に利用してもよい。
【0051】
複数の粒子が試料から離脱して電子増倍板25に入射した場合であっても、上述したように、T1+T2−2T0は一定であるという関係があるので、解析部21は、T1+T2−2T0が所定の定数になるという条件を満たすT0、T1、T2の組合せを検出することにより、それぞれの粒子の入射に起因する信号を分離し、それぞれの粒子について入射位置と飛行時間を算出することができる。
【0052】
なお、図7では、遅延回路線41と導電板42とを空間的に分離して描いているが、製造を容易にする観点から、遅延回路線41は絶縁層を介して導電板42と一体的に構成されてもよい。この場合であっても、電子増倍板25から放射された電子を、遅延回路線41と導電板42の両者に入射させるために、遅延回路線41が導電板42に接する部分にのみ絶縁層を設け、それ以外の部分は電子が直接導電板42に入射できるようにしておく。
【0053】
このような構成によれば、より少ない信号数で入射位置と飛行時間を算出することができるので、回路の構成を簡易にすることができるとともに、解析を容易にすることができる。また、貫通孔19を有し、中空管30を挿設可能な位置感知型イオン検出器11の作製を容易にすることができる。遅延回路線41として、螺旋状の形状を有する例を示したが、中央付近に設けられる貫通孔19を除く、電子増倍板25から放出された電子が通過する可能性のある領域が実質的にカバーされ、かつ交差しないように設けられていれば、いかなる形状を有していてもよい。
【0054】
なお、電子増倍板25から放射される2次電子群は、多少の広がりをもって位置感知型イオン検出器11に入射するので、遅延回路線41の間隔が狭い場合、1つの粒子の入射に起因する2次電子が、遅延回路線41の隣接する複数の異なる位置に入射する可能性があるが、その場合であっても、上述したように、T1+T2−2T0が所定の定数になるという条件を利用して信号を分離することができる。逆に、遅延回路線41の間隔が広い場合、電子増倍板25から放射された全ての電子が遅延回路線41の線間を通過する可能性があるが、このような事態を低減するために、電子増倍板25から放射される2次電子群の放射角を考慮して、イオンが電子増倍板25に入射したときに放出される電子の少なくとも一部が必ず遅延回路線41に入射するように、遅延回路線41の間隔や、電子増倍板25と位置感知型イオン検出器11との間の距離などを設計するのが望ましい。
【図面の簡単な説明】
【0055】
【図1】前提技術に係る走査型アトムプローブの全体構成を示す図である。
【図2】実施の形態に係る走査型アトムプローブの全体構成を模式的に示す図である。
【図3】実施の形態に係る走査型アトムプローブの全体構成の別の例を示す図である。
【図4】中空管の構成を示す図である。
【図5】図3に示した構成例を模式的に示す図である。
【図6】実施の形態に係る走査型アトムプローブの全体構成の更に別の例を示す図である。
【図7】実施の形態に係る走査型アトムプローブの全体構成の更に別の例を示す図である。
【図8】実施の形態に係る遅延回路線の例を示す図である。
【符号の説明】
【0056】
1 パルス発生器、2 直流高圧電源、3 試料、4 探針、5 引出電極、9 スクリーン、10 探査穴、11 位置感知型イオン検出器、12 タイマー、13 リフレクトロン型質量分析器、19 貫通孔、20 表面形状分析部、21 解析部、25 電子増倍板、30 中空管、31 絶縁層、32 導電層、40 シールド板、41 遅延回路線、42 導電板、43 接点、100,200 走査型アトムプローブ。
【特許請求の範囲】
【請求項1】
試料の表面を走査する電極と、
前記試料に電圧を供給する電圧供給部と、
前記電圧供給部により供給された電圧により前記電極と前記試料の間に生じた電界によって、前記試料の表面の原子又は原子団を前記試料から脱離させたときに、脱離した粒子を検出する粒子検出部と、を備え、
前記粒子検出部は、
前記粒子の入射により電子を放出する電子増倍板と、
前記電子増倍板の後方に設けられ、前記電子増倍板から放出された電子の一部が入射する螺旋状の遅延回路線と、
前記遅延回路線の後方に設けられ、前記電子増倍板から放出された電子のうち、前記遅延回路線の線間を通過した電子が入射する導電板と、
を含むことを特徴とする分析装置。
【請求項2】
試料の表面を走査する電極と、
前記試料に電圧を供給する電圧供給部と、
前記電圧供給部により供給された電圧により前記電極と前記試料の間に生じた電界によって、前記試料の表面の原子又は原子団を前記試料から脱離させたときに、脱離した粒子を検出する粒子検出部と、を備え、
前記粒子検出部は、
前記粒子の入射により電子を放出する電子増倍板と、
前記電子増倍板の後方に設けられ、前記電子増倍板から放出された電子が通過する可能性のある領域に、前記粒子が前記電子増倍板に入射したときに放出される電子の少なくとも一部が必ず入射するような間隔で交差しないように設けられた一本の遅延回路線と、
前記遅延回路線の後方に設けられ、前記電子増倍板から放出された電子のうち、前記遅延回路線の線間を通過した電子が入射する導電板と、
を含むことを特徴とする分析装置。
【請求項3】
前記遅延回路線は、前記電子増倍板に平行な平面上に設けられることを特徴とする請求項1又は2に記載の分析装置。
【請求項4】
前記遅延回路線の一端から電子が検出された時刻と、前記導電板から電子が検出された時刻の差を用いて、前記遅延回路線における前記電子の入射位置を算出することにより、前記粒子の入射位置を算出する解析部を更に備えることを特徴とする請求項1から3のいずれかに記載の分析装置。
【請求項5】
前記解析部は、複数の粒子が前記試料の表面から脱離して前記電子増倍板に入射した場合に、それぞれの粒子が前記電子増倍板に入射したときに前記電子増倍板から放射された電子について、前記遅延回路線の一端から電子が検出された時刻T1と前記導電板から電子が検出された時刻T0の差と、前記遅延回路線の他端から電子が検出された時刻T2と前記導電板から電子が検出された時刻T0の差との和T1+T2−2T0が一定であることを利用して、前記和が所定の定数となるT0、T1、T2の組合せを検出することにより、それぞれの粒子の入射位置を算出することを特徴とする請求項4に記載の分析装置。
【請求項6】
前記遅延回路線の一端は前記導電板に接続され、前記遅延回路線の一端に到達した電子は、前記導電板を介して検出されることを特徴とする請求項1から5のいずれかに記載の分析装置。
【請求項7】
前記粒子検出部の後方に設けられ、前記粒子検出部よりも高い分解能で粒子の質量を分析することが可能な質量分析部を更に備え、
前記粒子検出部は、前記試料の表面から脱離された粒子の少なくとも一部を通過させるための貫通孔を有し、
前記質量分析部は、前記貫通孔を通過した粒子の質量を分析することを特徴とする請求項1から6のいずれかに記載の分析装置。
【請求項8】
前記貫通孔に設けられ、前記貫通孔の外部の電界を遮断する中空管を更に備えることを特徴とする請求項7に記載の分析装置。
【請求項9】
試料に電圧を供給するステップと、
前記試料の表面の原子又は原子団を前記電圧により脱離させるステップと、
脱離した粒子を電子増倍板に入射させるステップと、
前記粒子の入射により前記電子増倍板から放出された電子の一部が、螺旋状の遅延回路線に入射してから前記遅延回路線の一端に到達するまでの時間を算出するステップと、
算出された時間から前記粒子の入射位置を算出するステップと、
を含むことを特徴とする分析方法。
【請求項1】
試料の表面を走査する電極と、
前記試料に電圧を供給する電圧供給部と、
前記電圧供給部により供給された電圧により前記電極と前記試料の間に生じた電界によって、前記試料の表面の原子又は原子団を前記試料から脱離させたときに、脱離した粒子を検出する粒子検出部と、を備え、
前記粒子検出部は、
前記粒子の入射により電子を放出する電子増倍板と、
前記電子増倍板の後方に設けられ、前記電子増倍板から放出された電子の一部が入射する螺旋状の遅延回路線と、
前記遅延回路線の後方に設けられ、前記電子増倍板から放出された電子のうち、前記遅延回路線の線間を通過した電子が入射する導電板と、
を含むことを特徴とする分析装置。
【請求項2】
試料の表面を走査する電極と、
前記試料に電圧を供給する電圧供給部と、
前記電圧供給部により供給された電圧により前記電極と前記試料の間に生じた電界によって、前記試料の表面の原子又は原子団を前記試料から脱離させたときに、脱離した粒子を検出する粒子検出部と、を備え、
前記粒子検出部は、
前記粒子の入射により電子を放出する電子増倍板と、
前記電子増倍板の後方に設けられ、前記電子増倍板から放出された電子が通過する可能性のある領域に、前記粒子が前記電子増倍板に入射したときに放出される電子の少なくとも一部が必ず入射するような間隔で交差しないように設けられた一本の遅延回路線と、
前記遅延回路線の後方に設けられ、前記電子増倍板から放出された電子のうち、前記遅延回路線の線間を通過した電子が入射する導電板と、
を含むことを特徴とする分析装置。
【請求項3】
前記遅延回路線は、前記電子増倍板に平行な平面上に設けられることを特徴とする請求項1又は2に記載の分析装置。
【請求項4】
前記遅延回路線の一端から電子が検出された時刻と、前記導電板から電子が検出された時刻の差を用いて、前記遅延回路線における前記電子の入射位置を算出することにより、前記粒子の入射位置を算出する解析部を更に備えることを特徴とする請求項1から3のいずれかに記載の分析装置。
【請求項5】
前記解析部は、複数の粒子が前記試料の表面から脱離して前記電子増倍板に入射した場合に、それぞれの粒子が前記電子増倍板に入射したときに前記電子増倍板から放射された電子について、前記遅延回路線の一端から電子が検出された時刻T1と前記導電板から電子が検出された時刻T0の差と、前記遅延回路線の他端から電子が検出された時刻T2と前記導電板から電子が検出された時刻T0の差との和T1+T2−2T0が一定であることを利用して、前記和が所定の定数となるT0、T1、T2の組合せを検出することにより、それぞれの粒子の入射位置を算出することを特徴とする請求項4に記載の分析装置。
【請求項6】
前記遅延回路線の一端は前記導電板に接続され、前記遅延回路線の一端に到達した電子は、前記導電板を介して検出されることを特徴とする請求項1から5のいずれかに記載の分析装置。
【請求項7】
前記粒子検出部の後方に設けられ、前記粒子検出部よりも高い分解能で粒子の質量を分析することが可能な質量分析部を更に備え、
前記粒子検出部は、前記試料の表面から脱離された粒子の少なくとも一部を通過させるための貫通孔を有し、
前記質量分析部は、前記貫通孔を通過した粒子の質量を分析することを特徴とする請求項1から6のいずれかに記載の分析装置。
【請求項8】
前記貫通孔に設けられ、前記貫通孔の外部の電界を遮断する中空管を更に備えることを特徴とする請求項7に記載の分析装置。
【請求項9】
試料に電圧を供給するステップと、
前記試料の表面の原子又は原子団を前記電圧により脱離させるステップと、
脱離した粒子を電子増倍板に入射させるステップと、
前記粒子の入射により前記電子増倍板から放出された電子の一部が、螺旋状の遅延回路線に入射してから前記遅延回路線の一端に到達するまでの時間を算出するステップと、
算出された時間から前記粒子の入射位置を算出するステップと、
を含むことを特徴とする分析方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2009−295304(P2009−295304A)
【公開日】平成21年12月17日(2009.12.17)
【国際特許分類】
【出願番号】特願2008−145033(P2008−145033)
【出願日】平成20年6月2日(2008.6.2)
【出願人】(593165487)学校法人金沢工業大学 (202)
【Fターム(参考)】
【公開日】平成21年12月17日(2009.12.17)
【国際特許分類】
【出願日】平成20年6月2日(2008.6.2)
【出願人】(593165487)学校法人金沢工業大学 (202)
【Fターム(参考)】
[ Back to top ]