
分析装置
【課題】キャリーオーバの発生を抑制しながら、磁性粒子を用いて検体中の目的物質を分析する分析装置の検体処理能力を向上させることが可能な分析装置を提供する。
【解決手段】この免疫分析装置(分析装置)1は、複数のBFポート51a〜51dと、複数のBFポート51a〜51dにそれぞれ対応する複数のノズル61a〜61dとを備えた1次BF分離部11と、キュベット100を移送する移送アーム30と、各々のBFポート51a〜51dに配置されたキュベット100内への洗浄液の吐出およびキュベット100内の液体の吸引を、対応する各々のノズル61a〜61dにより並行して行いながら、各々のBFポート51a〜51dに配置されたキュベット100に対するBF分離処理を、対応した各ノズル61a〜61dにより個別に完了するように、1次BF分離部11を制御するCPU2aとを備える。
【解決手段】この免疫分析装置(分析装置)1は、複数のBFポート51a〜51dと、複数のBFポート51a〜51dにそれぞれ対応する複数のノズル61a〜61dとを備えた1次BF分離部11と、キュベット100を移送する移送アーム30と、各々のBFポート51a〜51dに配置されたキュベット100内への洗浄液の吐出およびキュベット100内の液体の吸引を、対応する各々のノズル61a〜61dにより並行して行いながら、各々のBFポート51a〜51dに配置されたキュベット100に対するBF分離処理を、対応した各ノズル61a〜61dにより個別に完了するように、1次BF分離部11を制御するCPU2aとを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、分析装置に関し、特に、磁性粒子を含む試薬を用いて検体に含まれる目的物質を分析する分析装置に関する。
【背景技術】
【0002】
従来、磁性粒子を含む試薬を用いて検体に含まれる目的物質を分析する分析装置が知られている(たとえば、特許文献1および2参照)。このような分析装置では、目的物質を含む免疫複合体と未反応物質とを分離するBF(Bound−Free)分離処理が行われる。BF分離処理では、検体中の分析対象(抗原または抗体)と、分析対象と特異的に結合する反応物質を結合させた磁性粒子とが反応した免疫複合体を磁力により反応容器の内壁に捕集し、反応容器への洗浄液の供給および反応容器内の液体の吸引を行うことにより、反応容器の内壁に捕集された免疫複合体を残して反応容器内の未反応物質が除去される。
【0003】
上記特許文献1には、磁気分離器、不純物吸引機構、洗浄液吐出機構をそれぞれ1つずつ備え、磁気分離器に移送された反応容器内で不純物吸引機構による吸引と反応容器への洗浄液の吐出とを繰り返すことにより、BF分離処理を行う分析装置が開示されている。
【0004】
また、上記特許文献2には、反応容器を搬送する移送体と、移送体による反応容器の搬送方向に沿って設けられた3つの洗浄用ポートと、3つの洗浄用ポートにそれぞれ対応して設けられ、不純物の吸引と洗浄液の吐出とを行う3つのBFノズルとを有するBF分離機構を備えた分析装置が開示されている。上記特許文献2に記載のBF分離機構では、反応容器が移送体により3つの洗浄用ポートに順次搬送されていき、3つの洗浄用ポートの各々で不純物の吸引と洗浄液の吐出とが2回ずつ実施される。つまり、1つの反応容器が3つの洗浄用ポートを経由して、1つの反応容器について不純物の吸引と洗浄液の吐出とが合計6回実施されることにより、BF分離処理が完了される。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2008−209330号公報
【特許文献2】特開2001−91521号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、上記特許文献1に記載の分析装置では、一度に1つの反応容器に対するBF分離処理を行うことしかできないため、多数の反応容器を処理する場合にはBF分離処理に時間がかかり、その結果、分析装置の検体処理能力を向上させることが困難となるという問題点がある。
【0007】
また、上記特許文献2に記載の分析装置では、反応容器の搬送方向の上流側に位置する洗浄用ポートのBFノズルが、毎回、未反応物質の濃度が高い試料内に挿入されて吸引や吐出を行うことになるため、上流側の洗浄用ポートのBFノズルは、下流側の洗浄用ポートのBFノズルよりも汚染されてしまう。このため、次の検体へのキャリーオーバ(前検体に含まれる物質の次検体への持ち越し)の発生を防ぐために上流側のBFノズルだけ長い時間をかけて洗浄すると、上流側のBFノズルの洗浄が完了するまでBF分離処理が開始できずに分析装置の検体処理能力を向上させることが困難となるという問題点がある。また、処理効率を考慮して上流側のBFノズルと下流側のBFノズルとで洗浄時間を同一にした場合には、汚染度の高い上流側のBFノズルに付着した汚れによって次の検体へのキャリーオーバが生じるおそれがあるという問題点が生じることになる。
【0008】
この発明は、上記のような課題を解決するためになされたものであり、本発明の1つの目的は、キャリーオーバの発生を抑制しながら、磁性粒子を用いて検体中の目的物質を分析する分析装置の検体処理能力を向上させることが可能な分析装置を提供することである。
【課題を解決するための手段および発明の効果】
【0009】
上記目的を達成するために、この発明の一の局面による分析装置は、検体に含まれる目的物質を、磁性粒子を含む試薬を用いて分析する分析装置であって、磁性粒子を含む液体試料を収容した容器がそれぞれ配置され、配置された容器内の磁性粒子を磁気的に捕集する複数の第1磁気捕集部と、複数の第1磁気捕集部にそれぞれ対応する複数のノズルとを備え、当該複数のノズルにより、複数の第1磁気捕集部に配置された複数の容器内への洗浄液の吐出および容器内の液体の吸引を行う目的物質分離部と、容器を複数の第1磁気捕集部のいずれかに移送する容器移送部と、各々の第1磁気捕集部に配置された容器内への洗浄液の吐出および容器内の液体の吸引を、対応する各々のノズルにより並行して行いながら、各々の第1磁気捕集部に配置された容器に対する目的物質分離処理を、対応した各々のノズルにより個別に完了するように、目的物質分離部を制御する制御部とを備える。
【0010】
この発明の一の局面による分析装置では、上記のように、複数の第1磁気捕集部と、複数の第1磁気捕集部にそれぞれ対応する複数のノズルとを設け、各々の第1磁気捕集部に配置された容器内への洗浄液の吐出および容器内の液体の吸引を、対応する各々のノズルにより並行して行いながら、各々の第1磁気捕集部に配置された容器に対する目的物質分離処理を、対応した各々のノズルにより個別に完了するように構成することによって、目的物質分離処理を複数の容器に対して並行して行うことができるので、分析装置による検体処理能力を向上させることができる。さらに、1つの容器に対する目的物質分離処理を、容器が配置された第1磁気捕集部に対応するノズルによって完了させることができるため、複数のノズルのうち特定のノズルのみが他のノズルよりも高度に汚染されるという事態を回避することができる。このため、複数のノズルを用いて複数の容器に対する目的物質分離処理を並行して行うように構成した場合にも、特定のノズルの洗浄にのみ長い時間を要することがないとともに、次の検体へのキャリーオーバの発生を抑制することができる。これらにより、この発明の一の局面による分析装置では、キャリーオーバの発生を抑制しながら、磁性粒子を用いて検体中の目的物質を分析する分析装置の検体処理能力を向上させることができる。
【0011】
上記一の局面による分析装置において、好ましくは、制御部は、各々の第1磁気捕集部に配置された容器内への洗浄液の吐出および容器内の液体の吸引を対応する各々のノズルにより複数回行うことで、各々の第1磁気捕集部に配置された容器に対する目的物質分離処理を完了するように目的物質分離部を制御可能に構成されている。このように構成すれば、各々の第1磁気捕集部において、対応するノズルによって容器内への洗浄液の吐出および容器内の液体の吸引を複数回繰り返すため、容器内の未反応物質の濃度を段階的に低下させることができる。これにより、容器内の未反応物質の濃度が低下していく過程でノズルに付着している汚れを併せて低減させることができる(ノズルに付着する汚れの濃度も低下していく)。この結果、各々の第1磁気捕集部において、目的物質分離処理が完了した時点でノズルに付着している汚れが低減された状態となっているため、ノズルの洗浄に要する時間を減少させることができる。
【0012】
この場合において、好ましくは、目的物質分離部は、複数のノズルの上下移動に共用される第1共用駆動部を備える。このように構成すれば、複数のノズルを共通の駆動部で上下移動させることができるため、装置構成を簡略化させることができる。
【0013】
上記目的物質分離部が第1共用駆動部を備える構成において、好ましくは、目的物質分離部は、第1共用駆動部により複数のノズルを同期して上下移動させるように構成され、制御部は、一の第1磁気捕集部に配置された一の容器内の目的物質分離処理の途中において、一の第1磁気捕集部に対応した一のノズルが上方に移動されて一の容器から抜き出されたときに、容器が配置されていない他の第1磁気捕集部へ他の容器を移送するように容器移送部を制御可能に構成されている。このように構成すれば、同期して上下移動する複数のノズルが上方に移動されて、一の第1磁気捕集部に配置された一の容器からノズルが抜き出されたときに、容器が配置されていない他の第1磁気捕集部へ他の容器を移送すればよいので、第1共用駆動部の制御を簡略化させつつ、複数の容器を目的物質分離処理の途中で順次第1磁気捕集部に移送することができる。
【0014】
上記一の局面による分析装置において、好ましくは、目的物質分離部は、複数の第1磁気捕集部にそれぞれ対応する複数の把持部と、複数の第1磁気捕集部に配置された複数の容器に対する複数の把持部の移動に共用される第2共用駆動部とを備え、複数の把持部により複数の容器を把持して当該複数の容器内の液体試料を撹拌するように構成されている。このように構成すれば、把持部により、容器内の未反応物質を拡散させてノズルによる吸引を容易にすることができるとともに、複数の把持部を共通の駆動部で上下移動させることができるため、装置構成を簡略化させることができる。
【0015】
上記一の局面による分析装置において、好ましくは、磁性粒子を含む液体試料を収容した容器が配置され、目的物質分離部の複数の第1磁気捕集部とは別個に設けられるとともに、容器内の磁性粒子を磁気的に捕集する第2磁気捕集部をさらに備え、制御部は、第2磁気捕集部に容器が配置された後に、容器を目的物質分離部のいずれかの第1磁気捕集部に移送するように容器移送部を制御可能に構成されている。このように構成すれば、第1磁気捕集部に容器が移送される前に、第2磁気捕集部で予め容器内の磁性粒子を捕集しておくことができるので、第1磁気捕集部において磁性粒子を捕集するのに要する時間を短縮することができる。その結果、容器内の液体の吸引動作をより早く開始することができる。
【0016】
上記一の局面による分析装置において、好ましくは、分析装置に供給された複数の容器を同一の搬送経路を経由した後、容器移送部により目的物質分離部のいずれかの第1磁気捕集部に搬送するように構成されている。このように構成すれば、複数の第1磁気捕集部に容器を搬送する容器移送部までの容器の搬送経路を共通化することができるので、複数の第1磁気捕集部の各々において並行して目的物質分離処理を行う構成においても、分析装置の装置構成および動作制御を簡略化させることができる。
【0017】
この場合において、好ましくは、目的物質分離部は、複数の第1磁気捕集部を水平方向に移動させる水平駆動部を含み、容器移送部は、容器を保持するアームと、所定の回転軸を中心としてアームを水平方向に回転させる回転駆動部とを含み、制御部は、アームに保持された容器の回転移動の軌道上に、目的物質分離部の第1磁気捕集部が位置するように、水平駆動部を制御可能に構成されている。このように構成すれば、軸周りにアームを回転させる簡素な構成でも、アームの回転軌道上に第1磁気捕集部を移動させることによって複数の第1磁気捕集部の各々に容器を移送することができる。
【0018】
上記容器移送部がアームと回転駆動部とを含む構成において、好ましくは、磁性粒子を含む試薬と検体とが収容された容器を保持する反応部をさらに備え、制御部は、反応部の第1の所定位置にある容器をアームにより取り出し、取り出した容器を目的物質分離部の第1磁気捕集部にアームにより移送し、目的物質分離部の第1磁気捕集部からアームにより容器を取り出して反応部の第2の所定位置に移送するように、回転駆動部を制御可能に構成されている。このように構成すれば、共通のアームによって、反応部から第1磁気捕集部のいずれかへの容器の移送と、第1磁気捕集部から反応部への容器の移送とを行うことができるので、装置構成をさらに簡略化させることができる。
【0019】
上記反応部を備える構成において、好ましくは、容器移送部は、1つのアームを含み、制御部は、第1の所定位置から複数の容器を1つのアームにより順次取り出し、取り出した容器を目的物質分離部のそれぞれの第1磁気捕集部に順次移送するとともに、目的物質分離処理が完了した容器から順に1つのアームにより第2の所定位置に移送するように回転駆動部を制御することが可能に構成されている。このように構成すれば、1つのアームによって、それぞれの第1磁気捕集部に容器を順次移送するとともに、目的物質分離処理の完了した容器を順次反応部に返却することができるので、装置構成を簡略化させることができる。この場合にも、容器が配置された第1磁気捕集部から目的物質分離処理を開始して、それぞれの第1磁気捕集部で部分的に処理を並行して行うことができるので、分析装置による検体処理能力の向上を図ることができる。
【図面の簡単な説明】
【0020】
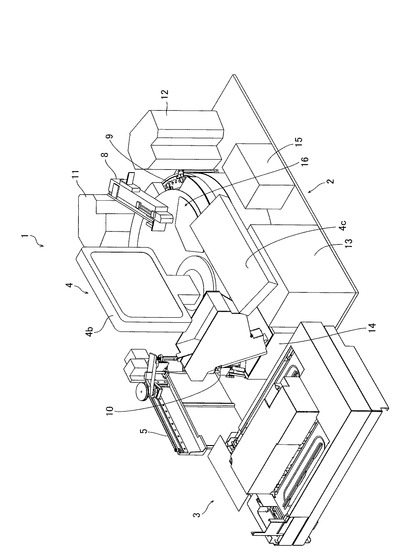
【図1】本発明の一実施形態による免疫分析装置の全体構成を示した斜視図である。
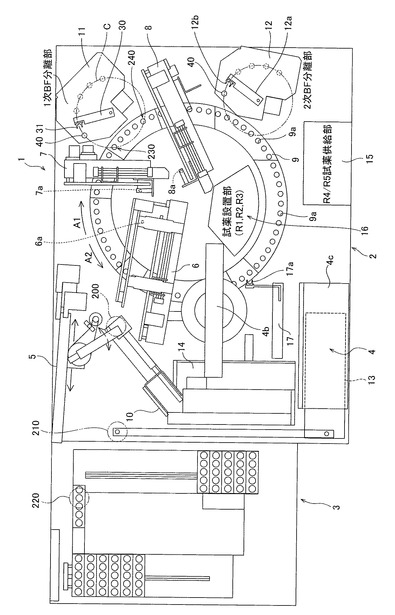
【図2】本発明の一実施形態による免疫分析装置の全体構成を示した平面図である。
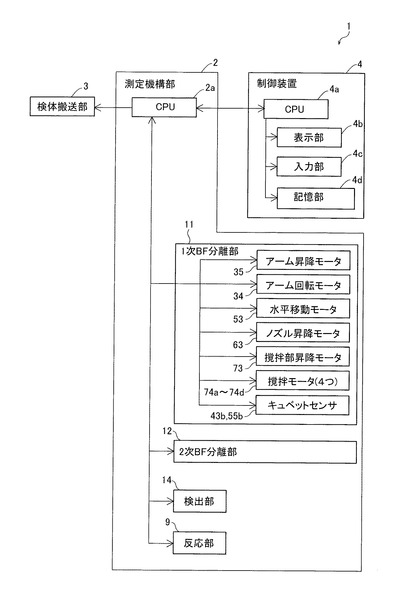
【図3】本発明の一実施形態による免疫分析装置の構成を説明するためのブロック図である。
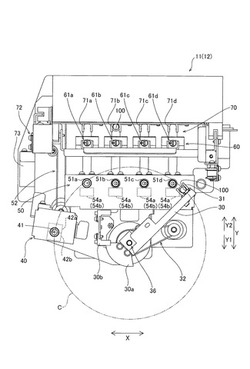
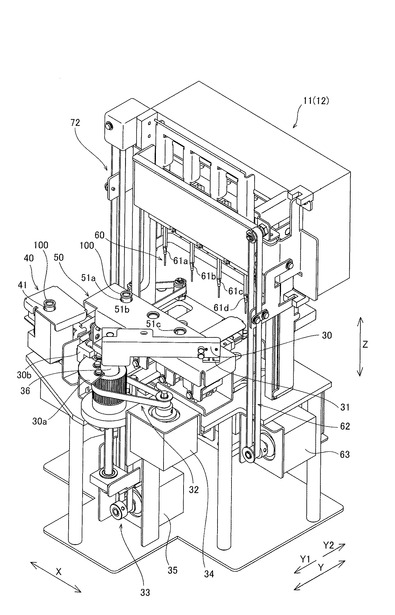
【図4】本発明の一実施形態による免疫分析装置の1次BF分離部の構成を説明するための斜視図である。
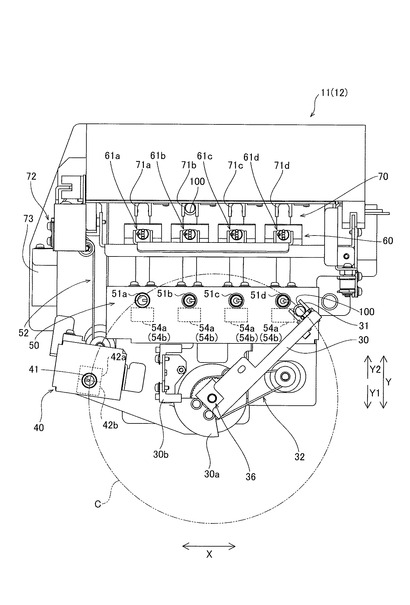
【図5】図4に示した1次BF分離部の平面図である。
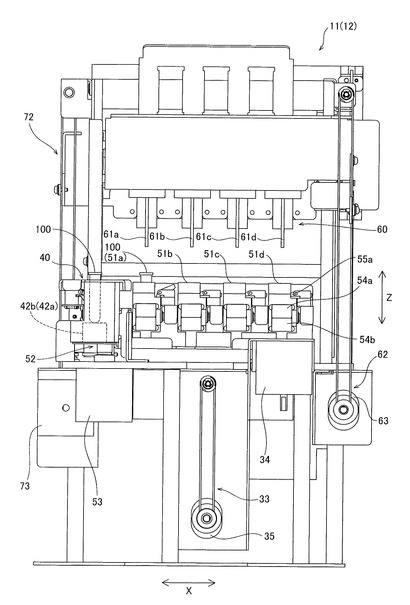
【図6】図4に示した1次BF分離部のプレ集磁部およびBFポートを正面側から示した模式図である。
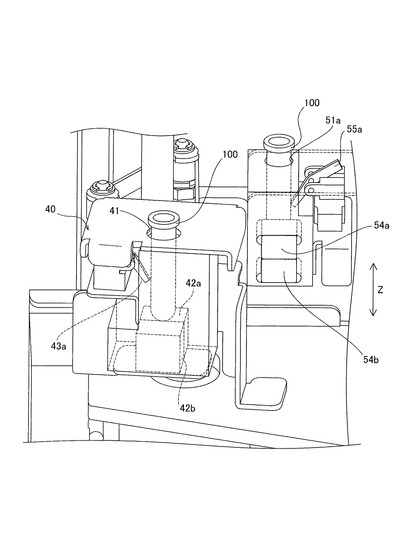
【図7】図4に示した1次BF分離部のプレ集磁部およびBFポートを説明するための斜視図である。
【図8】図4に示した1次BF分離部のプレ集磁部の内部構造を模式的に示した断面図である。
【図9】図4に示した1次BF分離部のプレ集磁部およびBFポートの機能を説明するための模式図である。
【図10】本発明の一実施形態による免疫分析装置の1次BF分離部によるBF分離処理を説明するためのタイミングチャートである。
【図11】図10に示したBF分離処理におけるBF洗浄処理(吸引・吐出処理)を説明するためのタイミングチャートである。
【図12】図10に示したBF分離処理におけるBF洗浄処理(吸引処理)を説明するためのタイミングチャートである。
【図13】本発明の一実施形態による免疫分析装置の1次BF分離部におけるプレ集磁部への移送処理の制御動作を示すフローチャートである。
【図14】本発明の一実施形態による免疫分析装置の1次BF分離部におけるBFポートへの移送処理の制御動作を示すフローチャートである。
【図15】本発明の一実施形態による免疫分析装置の1次BF分離部の各BFポートで実施されるBF洗浄処理の制御動作を示すフローチャートである。
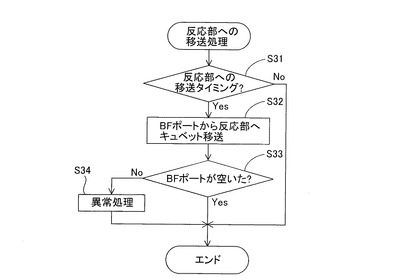
【図16】本発明の一実施形態による免疫分析装置の1次BF分離部における反応部への移送処理の制御動作を示すフローチャートである。
【発明を実施するための形態】
【0021】
以下、本発明を具体化した実施形態を図面に基づいて説明する。
【0022】
まず、図1〜図9を参照して、本発明の一実施形態による免疫分析装置1の構成について説明する。
【0023】
本発明の一実施形態による免疫分析装置1は、測定対象である血液などの検体(血液試料)に含まれる抗原や抗体などを定量測定または定性測定する装置である。この免疫分析装置1は、検体(血清)に含まれる抗原に結合した捕捉抗体(R1試薬)に磁性粒子(R2試薬)を結合させた後に、結合(Bound)した抗原、捕捉抗体および磁性粒子の複合体を1次BF分離部11の磁気により捕集するとともに、未反応(Free)の捕捉抗体を含むR1試薬を除去する(即ちBF分離)ように構成されている。そして、免疫分析装置1は、磁性粒子が結合した抗原と標識抗体(R3試薬)とを結合させた後に、結合(Bound)した磁性粒子、抗原および標識抗体の複合体を2次BF分離部12の磁気により捕集するとともに、未反応(Free)の標識抗体を含むR3試薬を除去する(即ちBF分離)。さらに、免疫分析装置1は、分散液(R4試薬)、および、標識抗体との反応過程で発光する発光基質(R5試薬)を添加した後、標識抗体と発光基質との反応によって生じる発光量を測定する。免疫分析装置1は、このような工程を経て、標識抗体に結合する検体に含まれる抗原を定量的に測定している。なお、免疫分析装置1は、検体に対して複数の異なる分析項目に対応する分析が可能なように構成されている。
【0024】
また、免疫分析装置1は、図1および図2に示すように、測定機構部2と、測定機構部2に隣接するように配置された検体搬送部(サンプラ)3と、測定機構部2に電気的に接続されたPC(パーソナルコンピュータ)からなる制御装置4とを備えている。
【0025】
検体搬送部3は、検体を収容した複数の試験管が載置されたラックを搬送可能に構成されている。また、検体搬送部3は、検体を収容した試験管を検体分注アーム5による検体吸引位置220まで搬送する機能を有する。
【0026】
制御装置4は、図3に示すように、CPU4a、表示部4b、入力部4cおよび記憶部4dを含む。CPU4aは、測定機構部2により得られた測定結果を分析し、その分析結果を表示部4bに表示する機能を有する。また、記憶部4dはHDD(ハードディスクドライブ)を含み、各種プログラムや測定結果のデータなどが記憶されるように構成されている。
【0027】
また、測定機構部2は、図2に示すように、検体分注アーム5と、R1試薬分注アーム6と、R2試薬分注アーム7と、R3試薬分注アーム8と、反応部9と、キュベット供給部10と、1次BF分離部11と、2次BF分離部12と、ピペットチップ供給部13と、検出部14と、R4/R5試薬供給部15と、試薬設置部16とから構成されている。
【0028】
また、図3に示すように、測定機構部2における各機構部(反応部9および1次BF分離部11など)は、測定機構部2に設けられたCPU2aにより制御されている。また、CPU2aは、検体搬送部3および制御装置4と通信可能に接続されており、制御装置4からの動作命令の受信、および、制御装置4への測定結果データの送信や、検体搬送部3への動作命令の送信などを行う機能を有する。
【0029】
図2に示すキュベット供給部10は、複数のキュベット100(図7参照)を収納可能に構成されており、検体分注アーム5による検体吐出位置200にキュベットを1つずつ順次供給する機能を有している。キュベット100は、図7に示すように、上端が開放され、下端が丸みを帯びた底部を有するとともに、水平断面において内側面および外側面が円形状に形成された細長い円筒形状の容器である。キュベット100は、測定機構部2の各所に設けられたキャッチャにより把持可能なように、上端部の外側面から外側に突出する突出部が形成されている。
【0030】
図2に示すように、R1試薬分注アーム6は、試薬設置部16に設置されたR1試薬容器からピペット6aによりR1試薬を吸引し、吸引したR1試薬を検体吐出位置200に載置されたキュベット100に分注(吐出)するように構成されている。また、R1試薬分注アーム6は、キャッチャにより検体吐出位置200に載置されたキュベット100を反応部9に移送する機能を有している。
【0031】
ピペットチップ供給部13は、投入された複数のピペットチップを1つずつ検体分注アーム5によるチップ装着位置210まで搬送する機能を有している。
【0032】
検体分注アーム5は、移動可能に構成され、チップ装着位置210においてピペットチップを装着した後、検体搬送部3により検体吸引位置220に搬送された試験管内の検体を吸引し、R1試薬分注アーム6によりR1試薬が分注された検体吐出位置200のキュベットに検体を分注(吐出)する機能を有している。
【0033】
R2試薬分注アーム7は、試薬設置部16に設置されたR2試薬容器からピペット7aによりR2試薬を吸引するとともに、R1試薬および検体を収容するキュベット100に吸引したR2試薬を分注(吐出)するように構成されている。
【0034】
反応部9は、平面的に見て、略円形形状を有する試薬設置部16の周囲を取り囲むように略円環状に形成されている。また、反応部9は、回転可能に構成されており、キュベット保持部9aに保持されたキュベット100を各種処理(試薬の分注など)が行われる各々の処理位置まで移動させる機能を有している。具体的には、反応部9は、矢印A1方向に回転して、R1試薬分注アーム6により反応部9に移送されたキュベット100を、R2試薬分注アーム7、1次BF分離部11、R3試薬分注アーム8、2次BF分離部12およびR4/R5試薬供給部15のそれぞれの処理位置にこの順序で搬送した後、検出部14まで移送する。
【0035】
1次BF分離部11は、検体、R1試薬およびR2試薬を収容するキュベット100を、移送アーム30のキャッチャ31により反応部9から取り出して、キュベット100内の試料から未反応のR1試薬(不要成分)と磁性粒子とを分離(BF分離)するように構成されている。そして、BF分離処理が完了した後、1次BF分離部11は、移送アーム30のキャッチャ31によりキュベット100を反応部9に戻すように構成されている。なお、1次BF分離部11の構造については、後に詳細に説明する。
【0036】
R3試薬分注アーム8は、試薬設置部16に設置されたR3試薬容器からピペット8aによりR3試薬を吸引するように構成されている。そして、R3試薬分注アーム8は、1次BF分離部11によるBF分離後の試料を収容するキュベット100に、吸引したR3試薬を分注(吐出)するように構成されている。
【0037】
2次BF分離部12は、1次BF分離部11によるBF分離後の試料およびR3試薬を収容するキュベット100を、移送アーム12aのキャッチャ12bにより反応部9から取得して、キュベット内の試料から未反応のR3試薬(不要成分)と磁性粒子とを分離(BF分離)するように構成されている。その後、2次BF分離部12は、移送アーム12aのキャッチャ12bによりキュベット100を反応部9に戻すように構成されている。
【0038】
R4/R5試薬供給部15は、チューブにより、2次BF分離部12によるBF分離後の試料を収容するキュベット100に、R4試薬およびR5試薬を順に分注するように構成されている。
【0039】
検出部14は、所定の処理が行なわれた検体の抗原に結合する標識抗体と発光基質との反応過程で生じる光を光電子増倍管(Photo Multiplier Tube)で取得することにより、その検体に含まれる抗原の量を測定するために設けられている。なお、キュベット100は、キャッチャ17aを有するキュベット移送部17により反応部9から取り出されて検出部14にセットされる。また、キュベット移送部17は、キュベット100を検出部14に移送する他に、検出部14による測定終了後のキュベット100を検出部14から取り出して廃棄部に廃棄する機能を有する。
【0040】
試薬設置部16は、捕捉抗体を含むR1試薬が収容されたR1試薬容器と、磁性粒子を含むR2試薬が収容されたR2試薬容器と、標識抗体を含むR3試薬が収容されたR3試薬容器とを、それぞれ複数設置するために設けられている。
【0041】
次に、1次BF分離部11の構成について詳細に説明する。なお、2次BF分離部12の構成は1次BF分離部11と同様であるので、説明を省略する。
【0042】
図4〜図6に示すように、1次BF分離部11は、キュベット100を取り出すためのキャッチャ31を有する移送アーム30と、プレ集磁部40と、可動設置部50と、ノズル部60と、撹拌部70(図5参照)とを主として備えている。可動設置部50には、検体、R1試薬およびR2試薬を収容したキュベット100を設置してBF分離処理を行うためのBFポート51a〜51d(図5参照)が4つ並んで設けられている。ノズル部60には、これら4つのBFポート51a〜51dに対応する4つのノズル61a〜61d(図6参照)が設けられている。撹拌部70には、4つのBFポート51a〜51dに対応する4つの撹拌キャッチャ71a〜71d(図5参照)が設けられている。これにより、1次BF分離部11では、4つのBFポート51a〜51dのそれぞれに設置される最大4つのキュベット100(キュベット100内の試料)に対して、並行してBF分離処理を行うことが可能なように構成されている。なお、図6では、BFポート51a〜51dの構造を示すために、移送アーム30や可動設置部50の上部カバー部分などを取り除いた状態を模式的に示している。
【0043】
図5に示すように、移送アーム30は、先端にキュベット100を把持可能なキャッチャ31を有し、プレ集磁部40と、可動設置部50の4つのBFポート51a〜51dと、反応部9のキュベット保持部9a(図2参照)とのそれぞれの間でキュベット100の移送を行う機能を有する。具体的には、図4に示すように、移送アーム30は、ベルトおよびプーリからなる伝達機構32および33を介してそれぞれ接続されたアーム回転モータ34とアーム昇降モータ35とにより、上下(Z方向)に延びる回転軸36を中心に回動(旋回)可能で、かつ、上下(Z方向)に昇降可能に構成されている。これにより、キャッチャ31は、プレ集磁部40の後述するキュベット設置部41と、BFポート51a〜51dと、キュベット保持部9a(取出位置230および返却位置240、図2参照)とを通過する所定の円弧軌跡C(図5参照)上で移動し、上記の各部でのキュベット100の設置および取り出しが可能となっている。なお、移送アーム30には、回転軸36と一体的に回転する検知板30aが設けられており、光透過型のセンサ30bによって検知板30aを検出可能となっている。このセンサ30bの検知結果に基づいて、移送アーム30の旋回方向の原点セットが行われる。
【0044】
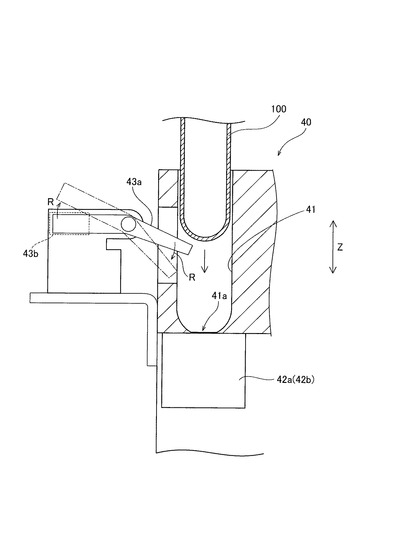
プレ集磁部40は、可動設置部50の各BFポート51a〜51dにおいて実施されるBF分離処理に先立って、キュベット100内の磁性粒子を予め捕集しておく機能を有する。プレ集磁部40は、1次BF分離部11の手前側(矢印Y1方向側)の位置において、移送アーム30(キャッチャ31)の円弧軌跡C上に設けられた1つのキュベット設置部41を備えている。図8に示すように、キュベット設置部41は、検体、R1試薬およびR2試薬を収容するキュベット100を配置可能に構成され、キュベット100の外形形状に対応した形状を有する穴部からなる。また、図7に示すように、プレ集磁部40は、キュベット100内の磁性粒子を磁気的に捕集するための直方体形状の2個1組の永久磁石42aおよび42bを内蔵している。
【0045】
永久磁石42aおよび42bは、図5に示すように、平面的に見て、キュベット設置部41にセットされたキュベット100と重なるように配置されている。より具体的には、図7に示すように、永久磁石42aおよび42bは、キュベット設置部41にセットされたキュベット100の直下の位置に配置されており、この位置でキュベット100内の磁性粒子を下方から磁気的に捕集する(集磁する)ように構成されている。なお、キュベット設置部41の底部は、キュベット100の底部の形状に対応して狭まる曲面状に形成されているとともに、セットされたキュベット100の底部が露出するように開口部41a(図8参照)が形成されている。永久磁石42aおよび42bは、キュベット100がキュベット設置部41にセットされた状態で、キュベット設置部41の開口部41aから露出するキュベット100の底部(外底面)と接触する位置に配置されている。なお、磁石42aおよび42bは、キュベット設置部41の開口部41aから露出するキュベット100の底部(外底面)から僅かに間隔を開ける位置に配置されてもよい。
【0046】
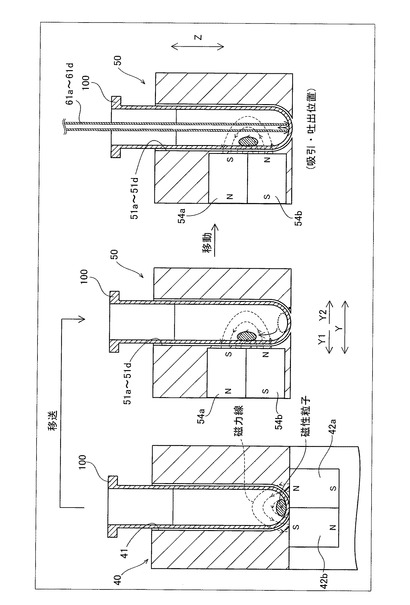
また、図9に示すように、2個1組の永久磁石42aおよび42bは、横並びに隣接して配置され、一方の永久磁石42aの上面側がN極(下面側がS極)となるとともに、他方の永久磁石42bの上面側がS極(下面側がN極)となるように設置されている。これにより、横並びに配置された2個1組の永久磁石42aおよび42bの中間の位置(境界線上)で最も磁力が強くなる。永久磁石42aおよび42bは、この最も磁力が強くなる中間部がキュベット設置部41にセットされたキュベット100の下端部の直下に位置するように配置されている。これにより、キュベット100内の磁性粒子がキュベット100の内底面(最も低い位置)に確実に捕集される。なお、プレ集磁部40は非磁性のアルミ(合金)製であるため、永久磁石42aおよび42bによる磁力線(図9参照)はキュベット100を取り囲む周壁にほとんど遮られることなく突き抜けてキュベット100に到達する。
【0047】
また、図8に示すように、キュベット設置部41の側面側には、キュベット設置部41の内部への進入および内部からの退出が可能な検知片43aと、この検知片43aを検出する光透過型のキュベットセンサ43b(図8の破線参照)が設けられている。検知片43aは、キュベット100がセットされていない状態でキュベットセンサ43bを遮光している。キュベット100がキュベット設置部41内にセットされるのに伴い検知片43aが矢印R方向に回動することにより、検知片43aによる遮光が解除される(図8の一点鎖線参照)。これにより、キュベット100がプレ集磁部40(キュベット設置部41)にセットされているか否かを検知することが可能なように構成されている。
【0048】
図5に示すように、可動設置部50は、横方向(X方向)に直線状に等間隔で配置された4つのBFポート51a〜51dを備えている。可動設置部50は、ベルトおよびプーリからなる伝達機構52を介して接続された水平移動モータ53(図6参照)により、Y方向に水平移動可能に構成されている。これにより、可動設置部50は、4つのBFポート51a〜51dのそれぞれを、移送アーム30(キャッチャ31)の円弧軌跡C上の位置(キュベットセット位置)と、各BFポート51a〜51dに対応するノズル61a〜61dの直下の位置(吸引・吐出位置)と、各BFポート51a〜51dに対応する撹拌キャッチャ71a〜71dのキュベット取り出し位置とに配置させる機能を有する。なお、図5から分かるように、Y方向に移動する各BFポート51a〜51dが円弧軌跡Cと交わる位置(キュベットセット位置)は、Y方向に関して互いに異なる。このため、可動設置部50は、移送アーム30から移送されるキュベット100をBFポート51a〜51dのいずれにセットするかに応じて、Y方向の移動位置を変えるように制御される。
【0049】
また、図6に示すように、可動設置部50の各BFポート51a〜51dは、同一構造を有し、キュベット100を配置可能な穴部からなる。また、各BFポート51a〜51dには、それぞれ、直方体形状の2個一組の永久磁石54aおよび54bが設けられ、BFポート51a〜51dに設置されたキュベット100内の磁性粒子を捕集するように構成されている。BFポート51a〜51dの永久磁石54aおよび54bは、上記プレ集磁部40の永久磁石42aおよび42bとは異なり、セットされたキュベット100の側方に位置するように配置されている。具体的には、図5および図7に示すように、永久磁石54aおよび54bは、BFポート51a〜51dに設置されたキュベット100の手前側(矢印Y1方向側)の側方の位置に配置されている。
【0050】
図9に示すように、2個1組の永久磁石54aおよび54bは、上下に隣接して配置され、上方の永久磁石54aのキュベット100側(矢印Y2方向側)の側面がS極(矢印Y1方向側がN極)となるとともに、下方の永久磁石54bのキュベット100側(矢印Y2方向側)の側面がN極(矢印Y1方向側がS極)となるように設置されている。これにより、上下に配置された2個1組の永久磁石54aおよび54bの中間の高さ位置(境界線上)で最も磁力が強くなる。このため、BFポート51a〜51dに設置されたキュベット100内の磁性粒子は、永久磁石54aおよび54bによって内底面よりも上方の高さ位置における内側面側に捕集される。
【0051】
ここで、BF分離処理において、プレ集磁部40で予め磁性粒子が捕集されたキュベット100が、移送アーム30(キャッチャ31)によってプレ集磁部40から取り出されて、4つのBFポート51a〜51dのいずれかに移送されるように構成されている。このため、BFポート51a〜51dのいずれかにキュベット100が設置される時には、既にキュベット100内の磁性粒子はキュベット100の内底面側に塊状に集められた状態となっている。そして、BFポート51a〜51dのいずれかにキュベット100が設置されると、キュベット100の内底面側に集められた磁性粒子の塊が、側方の永久磁石54aおよび54bの磁力によって塊状のままキュベット100の内壁に沿って上方の内側面側の捕集位置まで移動する。なお、キュベット100がプレ集磁部40で移送アーム30によって取り出されてからBFポート51a〜51dのいずれかにセットされるまでの間はキュベット100内の磁性粒子に磁力が付与されない状態となるが、キュベット100内の磁性粒子は、磁性粒子自体の自重によってキュベット100の内底面側に集められた状態を維持する。このため、キュベット100の移送時に磁性粒子に継続的に磁力を付与しなくても、BFポート51a〜51dで迅速に磁性粒子を捕集することが可能である。
【0052】
また、図5に示すように、移送アーム30は回転軸36周りに旋回する構造を有するため、4つのBFポート51a〜51dにセットされるキュベット100は、平面的に見て、移送アーム30の回転角度に応じてそれぞれ異なる向きでセットされる。本実施形態では、上記のようにプレ集磁部40で磁性粒子がキュベット100の内底面側に捕集され、かつ、各BFポート51a〜51dでは水平断面において円形状のキュベット100の内側面側に磁性粒子が捕集される。このため、各BFポート51a〜51dにセットされる際のキュベット100の向きが移送アーム30の回転角度に応じて異なっても、各BFポート51a〜51dで磁性粒子を全く同じように捕集した状態でBF分離処理を実施することが可能である。
【0053】
なお、図7に示すように、可動設置部50の各BFポート51a〜51dにも、プレ集磁部40と同様の検知片55aと、検知片55aを検出する光透過型のキュベットセンサ55b(図3参照)とが設けられている。これにより、4つのBFポート51a〜51dの各々にキュベット100がセットされているか否かを検知することが可能である。
【0054】
図5に示すように、ノズル部60は、4つのBFポート51a〜51dに対応して横方向(X方向)の直線状に等間隔で配置された4つのノズル61a〜61dを有している。図4に示すように、ノズル部60は、ベルトおよびプーリからなる伝達機構62を介して接続されたノズル昇降モータ63により、上下方向(Z方向)に昇降可能に構成されている。したがって、4つのノズル61a〜61dはノズル部60の1つのノズル昇降モータ63により、一体的に昇降する。これにより、ノズル部60は、可動設置部50の移動により4つのBFポート51a〜51dが対応する各ノズル61a〜61dの直下の位置(吸引・吐出位置)に配置された状態で、4つのノズル61a〜61dを4つのBFポート51a〜51dにそれぞれセットされたキュベット100の内部に進入(下降)させ、または、4つのノズル61a〜61dをキュベット100の内部から退出(上昇)させる機能を有する。
【0055】
4つのノズル61a〜61dは、同一構造を有し、洗浄液を吐出するための吐出ノズルと、キュベット100内の液体(未反応物質)を吸引するための吸引ノズルと、吐出ノズルおよび吸引ノズルを洗浄するために洗浄液を吐出する洗浄ノズルとの3本のノズルが一組となった構造を有する。4つのノズル61a〜61dの下方の位置には洗浄ポートがそれぞれ設けられており、ノズル61a〜61d自身の洗浄を行うことが可能である。なお、4つのノズル61a〜61dによる吸引や吐出は、それぞれ個別に動作可能に構成されており、4つのうちのいずれかのBFポート51a〜51dにキュベット100がセットされていない場合などでは、対応するノズル61a〜61dの吸引や吐出動作を行わないように制御することが可能である。
【0056】
また、図9に示すように、ノズル61a〜61dによりキュベット100内の液体(未反応物質)の吸引を行う際には、ノズル(吸引ノズル)61a〜61dの先端がキュベット100の底部(内底面)近傍まで下降された状態で行われるように構成されている。上記のようにBFポート51a〜51dでは磁性粒子がキュベット100の底部から上方に離間した内側面側に捕集されるので、液体(未反応物質)の吸引時に磁性粒子が吸引されてしまうのを抑制することが可能である。
【0057】
図5に示すように、撹拌部70は、4つのBFポート51a〜51dに対応して横方向(X方向)の直線状に等間隔で配置された4つの撹拌キャッチャ71a〜71dを有している。図6に示すように、撹拌部70は、ベルトおよびプーリからなる伝達機構72を介して接続された撹拌部昇降モータ73により、上下方向(Z方向)に昇降可能に構成されている。このため、4つの撹拌キャッチャ71a〜71dは撹拌部70の1つの撹拌部昇降モータ73により、一体的に昇降する。これにより、撹拌部70は、各BFポート51a〜51dにセットされたキュベット100をそれぞれ把持可能なキュベット取り出し位置に撹拌キャッチャ71a〜71dが配置されるように下降することにより、4つのBFポート51a〜51dのキュベット100を対応する撹拌キャッチャ71a〜71dに把持させる機能を有する。また、撹拌部70は、各BFポート51a〜51dのキュベット100を対応する撹拌キャッチャ71a〜71dで把持したまま上昇または下降することにより、BFポート51a〜51dからキュベット100を取り出し、または取り出したキュベット100を各BFポート51a〜51dに返却することが可能である。
【0058】
4つの撹拌キャッチャ71a〜71dには、それぞれ撹拌キャッチャ71a〜71dを揺動(振動)させるための撹拌モータ74a〜74d(図3参照)が設けられている。これにより、撹拌キャッチャ71a〜71dは、それぞれ、キュベット100を把持してBFポート51a〜51dから取り出した状態(磁性粒子が永久磁石54aおよび54bにより捕集されていない状態)で撹拌モータ74a〜74dを駆動することによって、キュベット100内部の磁性粒子を撹拌する機能を有する。これにより、塊状に捕集された磁性粒子の間に挟まれた未反応物質などを分散させることができる。なお、4つの撹拌キャッチャ71a〜71dにそれぞれ設けられた撹拌モータ74a〜74dは、個別に駆動させることが可能である。このため、4つのうちのいずれかのBFポート51a〜51dにキュベット100がセットされていない場合などには、対応する撹拌キャッチャ71a〜71dによる撹拌動作も行わないように制御することが可能である。
【0059】
以上の構成によって、1次BF分離部11では、4つのBFポート51a〜51dのそれぞれにおいて、対応するノズル61a〜61dと撹拌キャッチャ71a〜71dとによって個別にBF分離処理を行うことが可能である。BF分離処理においては、BFポート51a〜51dにおいて磁性粒子を捕集した状態で対応するノズル61a〜61dによってキュベット100内の液体を吸引(除去)する動作と、対応するノズル61a〜61dによってキュベット100内に洗浄液を吐出する動作と、対応する撹拌キャッチャ71a〜71dによってキュベット100内の試料を撹拌する動作とが複数回にわたって繰り返し行われる。これにより、磁性粒子を残したままキュベット100内部の未反応物質の濃度を段階的に低下させていくことによって、磁性粒子、抗原および捕捉抗体の複合体と、未反応物質とを分離(BF分離)する。
【0060】
また、本実施形態では、図2に示すように、プレ集磁部40に移送されるまでは、BF分離処理に供されるキュベット100はすべて同一の搬送経路(反応部9および移送アーム30による搬送経路)を経由する。そして、プレ集磁部40からBFポート51a〜51dのいずれかに移送される際に、各キュベット100はそれぞれ異なる搬送経路で移送されることになる。
【0061】
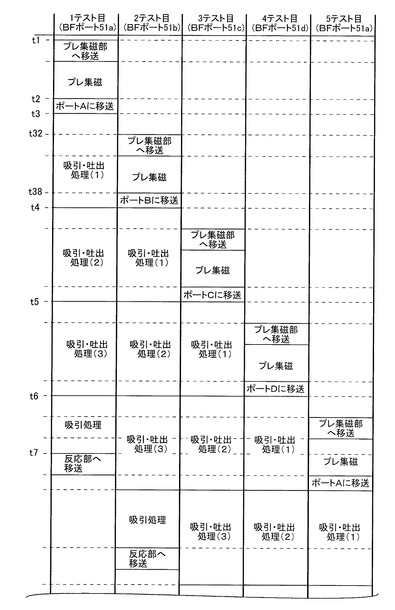
次に、図2、図3、図5および図9〜図12を参照して、本発明の一実施形態による免疫分析装置1(測定機構部2)の1次BF分離部11のBF分離処理動作について説明する。1次BF分離部11によるBF分離処理動作は、免疫分析装置1全体の測定処理動作の一部として、各種分注アームによる分注動作や、反応部9によるキュベット100の搬送と同期させるため、図10に示したタイミングチャートに従って予め設定された所定のタイミングで動作する。1次BF分離部11によるBF分離処理は、4つのBFポート51a〜51dによって最大4つのキュベット100(キュベット100内の試料)に対して並行して行われる。
【0062】
BF分離処理は、プレ集磁部40におけるプレ集磁(磁力による磁性粒子の捕集)処理と、BF洗浄処理(3回の吸引・吐出処理および吸引処理)とから主として構成されている。ここで、反応部9、プレ集磁部40および各BFポート51a〜51dへのキュベット100の移送が1つの移送アーム30によって行われるため、各BFポート51a〜51dにおける処理動作は、時間をずらしながら並行して行われる。以下では、BFポート51a(ポートA)、51b(ポートB)、51c(ポートC)、51d(ポートD)の順でそれぞれのBFポートへキュベット100が移送され、この順でBF分離処理が実施される例について説明する。
【0063】
図10に示すように、タイミングt1において、反応部9からプレ集磁部40へキュベット100が移送される。反応部9の取出位置230(図2参照)に配置されたキュベット100が移送アーム30により取り出され、プレ集磁部40へと移送される。このプレ集磁部40へのキュベット100の移送タイミングは所定の時間間隔毎に設定され、1つ目(1テスト目)のキュベット100がプレ集磁部40からBFポート51aへ移送された後に、次の(2テスト目)のキュベット100の移送タイミングt32となる。1テスト目のキュベット100がプレ集磁部40へ移送されると、タイミングt2までの所定時間の間、プレ集磁部40に保持されるプレ集磁処理が行われる。これにより、プレ集磁部40にセットされたキュベット100の底部に磁性粒子が捕集される(図9参照)。
【0064】
次に、タイミングt2において、移送アーム30(アーム回転モータ34およびアーム昇降モータ35)が駆動され、プレ集磁部40から1テスト目のキュベット100が取り出されるとともに、空いているBFポート51a(ポートA)に移送される。BFポートへの移送タイミングは所定の時間間隔毎に設定されている。1つ目(1テスト目)のキュベット100がプレ集磁部40からBFポート51aへ移送された後に、次の(2テスト目)のキュベット100のプレ集磁処理が終了すると、次の(2テスト目)のキュベット100をBFポート51b(ポートB)に移送するタイミングt38となる。
【0065】
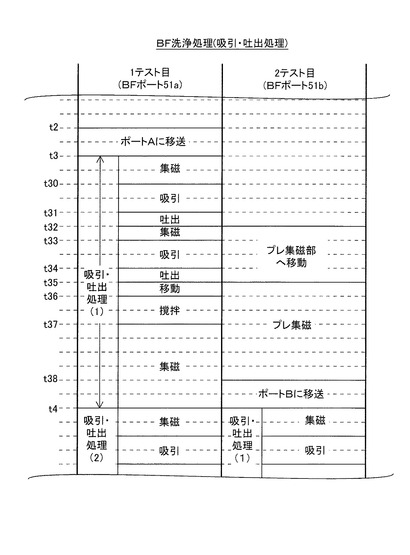
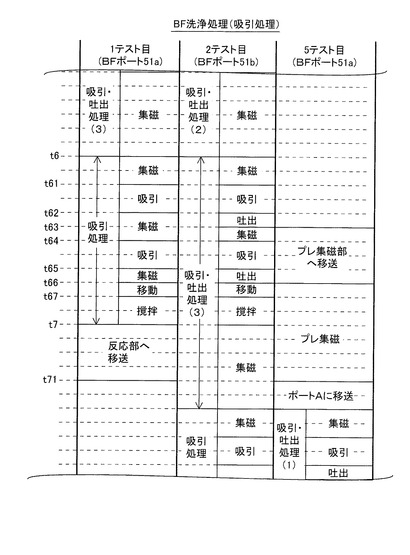
次に、タイミングt3において、1テスト目のキュベットに対してBF洗浄処理(吸引・吐出処理)が開始される。BF洗浄処理は、1つのキュベット100(試料)について、所定の時間間隔毎に設定されたタイミングt3、t4、t5において実施される3回の吸引・吐出処理(1)〜(3)と、3回の吸引・吐出処理終了後のタイミングt6で実施される吸引処理とによって構成される。BF洗浄処理は各BFポートで同一であるので、ここではBFポート51a(ポートA)における1テスト目のキュベット100に対するBF洗浄処理を説明する。
【0066】
図11に示すように、BF洗浄処理(吸引・吐出処理)の開始タイミングt3でBFポート51aに1テスト目のキュベット100がセットされると、BFポート51aにおいてタイミングt30までの間、集磁処理が実施される。これにより、キュベット100がセットされたBFポート51aにおいて、磁性粒子がキュベット100の内側面側に捕集(図9参照)される。また、この集磁処理中に、可動設置部50が移動してノズル61a〜61dによる吸引・吐出位置(ノズル61a〜61dの直下の位置)にBFポート51a〜51dが位置付けられる。
【0067】
次に、タイミングt30において、1テスト目のキュベット100内部の液体の吸引が行われる。具体的には、図9に示すように、キュベット100内の磁性粒子を捕集した状態でノズル部60が下降され、各BFポート51a〜51dに対応するノズル61a〜61dがキュベット100内に進入するとともに、ノズル61a〜61dによって液体の吸引が行われる。なお、1テスト目では、BFポート51b〜51dにキュベット100はセットされていない(BF洗浄処理が開始していない)ので、ノズル61b〜61dはそれぞれBFポート51b〜51d内で吸引・吐出位置まで位置付けられるが、吸引動作は実施されない。以下の各処理でも同様であり、可動設置部50の移動やノズル部60および撹拌部70の昇降移動などは各BFポート51a〜51dで同期して行われるが、BF洗浄処理が開始していないBFポートでは、液体の吸引、洗浄液の吐出や撹拌は行われない。
【0068】
液体の吸引後、タイミングt31において、1テスト目のキュベット内にノズル61aから所定量の洗浄液が吐出され、ノズル部60が上昇してノズル61aがキュベット100内部から退出する。
【0069】
その後、タイミングt32において集磁処理が行われ、タイミングt33において、1テスト目のキュベット100内部の液体の吸引が行われる。タイミングt34では、ノズル61aから所定量の洗浄液が吐出され、ノズル部60が上昇してノズル61aがキュベット100内部から退出する。つまり、1回のBF洗浄処理で、集磁処理、液体の吸引および洗浄液の吐出が各2回実施される。なお、このタイミングt32において2テスト目のキュベットをプレ集磁部40へ移送するタイミングとなる。したがって、次の(2テスト目の)キュベット100のプレ集磁部40への移動処理が開始され、タイミングt35からプレ集磁が開始される。
【0070】
続いて、タイミングt35において、撹拌部70が下降され、各撹拌キャッチャ71a〜71dがキュベット取り出し位置に位置付けられるとともに、可動設置部50が移動してBFポート51aのキュベット100を対応する撹拌キャッチャ71aに把持させる。
【0071】
次に、タイミングt36において、撹拌部70(図5参照)が上昇され、把持されたキュベット100がBFポート51aから取り出されるとともに、撹拌キャッチャ71aの撹拌モータ74a(図3参照)が駆動されることにより、磁性粒子が集磁されていない状態で撹拌処理が実施される。その後、撹拌部70が下降され、キュベット100が撹拌キャッチャ71aから対応するBFポート51aに返却される。
【0072】
撹拌後、タイミングt37において、分散された磁性粒子を永久磁石54aおよび54bにより再度捕集するため、集磁処理が所定時間の間(次のタイミングt4まで)実施される。以上により、1回のBF洗浄動作が終了する。
【0073】
なお、この集磁処理の実施中にタイミングt38において、次の(2テスト目の)キュベット100のBFポート51b(ポートB)への移送処理が実施される。したがって、次に吸引・吐出処理が開始されるタイミングt4がくると、BFポート51a(ポートA)では1テスト目のキュベット100に対する2回目の吸引・吐出処理が実施され、BFポート51b(ポートB)では2テスト目のキュベット100に対するBF洗浄処理(1回目の吸引・吐出処理)が開始される。このように、BF洗浄処理中には、ノズル61a(61b〜61d)がキュベット100内部から抜き出されたときに、キュベット100を保持していない次の空きBFポート(ここでは、BFポート51b)にキュベット100が移送される。そして、BF洗浄処理の内容は同一であるので、BFポート51aとBFポート51bとで同期して同じBF洗浄処理動作が実行される。図10に示すように、3テスト目以降も同様である。
【0074】
吸引・吐出動作が3回実施されたBFポート51aでは、次のタイミングt6で吸引処理が行われる。なお、吸引処理は他のBFポートにおけるBF洗浄処理と同期して行われる。
【0075】
図12に示すように、吸引処理では、タイミングt6でBFポート51aにおいて集磁処理が実施され、タイミングt61においてノズル61aによるキュベット100内部の液体の吸引が行われる。
【0076】
タイミングt62では、1テスト目のキュベットに対して、吸引・吐出処理と異なり、再度集磁処理がタイミングt64まで実施される(洗浄液の吐出が行われない)。なお、タイミングt63では、5テスト目のキュベット100のプレ集磁部40への移送タイミングとなる。これにより、移送アーム30により5テスト目のキュベット100が反応部9からプレ集磁部40へ移送される。この5テスト目のキュベット100が、1テスト目のキュベット100に対するBF洗浄処理の完了後にBFポート51aにセットされる次のキュベット100となる。
【0077】
タイミングt64では、再度、1テスト目のキュベット100内部の液体の吸引が行われる。続いて、タイミングt65において、1テスト目のキュベットに対して、吸引・吐出処理と異なり、集磁処理が実施される(液体の吐出が行われない)。
【0078】
タイミングt66では、撹拌部70が下降されるとともに、可動設置部50が移動してBFポート51aのキュベット100を対応する撹拌キャッチャ71aに把持させる。
【0079】
次に、タイミングt67において、撹拌部70が上昇され、把持されたキュベット100がBFポート51aから取り出されるとともに撹拌キャッチャ71aの撹拌モータ74aが駆動されることにより、撹拌処理が実施される。その後、撹拌部70が下降され、キュベット100が各撹拌キャッチャ71aから対応するBFポート51aに返却される。
【0080】
以上により、吸引処理が終了する。図10に示すように、撹拌後、反応部への移送タイミングt7において、移送アーム30(アーム回転モータ34およびアーム昇降モータ35)が駆動され、BFポート51a(ポートA)からキュベット100が取り出されるとともに、所定の返却位置240(図2参照)でキュベット100が反応部9に返却される。これにより、1テスト目のキュベット100に対するBF洗浄処理が完了する。
【0081】
なお、1テスト目のキュベット100が反応部9に返却されると、タイミングt71において、プレ集磁部40から5テスト目のキュベット100が移送アーム30により取り出されるとともに、空いているBFポート51a(ポートA)に移送される。そして、BFポート51a(ポートA)では、次の(5テスト目の)キュベット100(試料)に対するBF洗浄処理が開始される。
【0082】
このようにして、BFポート51a〜51dの各々におけるBF洗浄処理は、移送アーム30によりセットされた順番で個別に開始される一方、一部の処理(吸引・吐出処理や吸引処理)を並行して実施する。そして、BFポート51a〜51dの各々においてBF洗浄処理が完了した順番で、移送アーム30により反応部9へとキュベット100が返却される。
【0083】
次に、図2、図3、図5および図10〜図16を参照して、本発明の一実施形態による免疫分析装置1(測定機構部2)の1次BF分離部11のBF分離処理における制御処理について説明する。
【0084】
BF分離処理における制御処理は、図10〜図12に示した各タイミングにおいて実施される4つの処理から構成されるとともに、これらの処理が並行して行われる。4つの処理は、具体的には、反応部9からプレ集磁部40へのキュベット100の移送処理(取出)と、プレ集磁部40からBFポート(51a〜51dのいずれか)へのキュベット100の移送処理と、BFポート51a〜51dのそれぞれにおけるBF洗浄処理(吸引・吐出処理および吸引処理)と、BFポート(51a〜51dのいずれか)から反応部9へのキュベット100の移送処理(返却)とである。なお、1次BF分離部11によるBF分離処理動作は、測定機構部2のCPU2aにより1次BF分離部11の各部が制御されることにより実施される。また、2次BF分離部12によるBF分離処理も同様であるので、説明を省略する。
【0085】
まず、図13に示す反応部9からプレ集磁部40へのキュベット100の移送処理について説明する。
【0086】
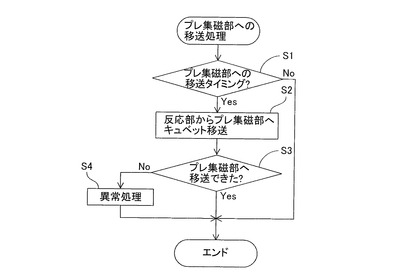
プレ集磁部40への移送処理では、ステップS1において、CPU2aによって、プレ集磁部40へのキュベット100の移送タイミング(タイミングt1、タイミングt32等)(図10参照)であるか否かが判断される。プレ集磁部40への移送タイミングでなければ、反応部9からプレ集磁部40へのキュベット100の移送は実施されない。
【0087】
プレ集磁部40へのキュベット100の移送タイミングである場合には、ステップS2において、移送アーム30により反応部9の取出位置230(図2参照)から所定のキュベット100が取り出されるとともに、プレ集磁部40のキュベット設置部41にセットされる。ステップS3では、キュベット設置部41のキュベットセンサ43bによる検知結果に基づいて、キュベット100がプレ集磁部40のキュベット設置部41にセットされたか否かが判断される。
【0088】
キュベット設置部41にセットできた場合にはプレ集磁部40へのキュベット100の移送処理が終了する。キュベットセンサ43bによる検知が確認できない場合には、ステップS4に進み、所定の異常(エラー)処理が行われた後、処理が終了する。プレ集磁部40への移送タイミングがくるたびにプレ集磁部40への移送処理が実施されることにより、処理対象のキュベット100が、順次、反応部9の取出位置230からプレ集磁部40へと移送される。
【0089】
次に、図14に示すBFポートへのキュベット100の移送処理について説明する。
【0090】
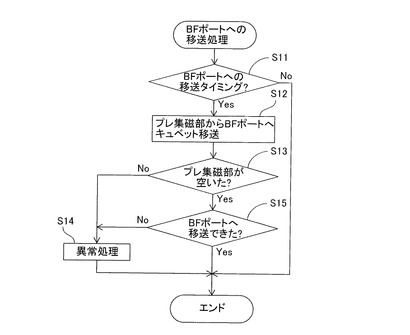
まず、ステップS11において、BFポート(51a〜51dのいずれか)への移送タイミング(タイミングt2、タイミングt38等)(図10参照)であるか否かが判断される。BFポートへの移送タイミングでなければ、プレ集磁部40からBFポート51a〜51dのいずれかへのキュベット100の移送は実施されない。
【0091】
BFポートへの移送タイミングである場合には、ステップS12に進み、移送アーム30(アーム回転モータ34およびアーム昇降モータ35)が駆動され、プレ集磁部40のキュベット設置部41からキュベット100がキャッチャ31によって取り出されるとともに、BFポート51a、51b、51c、51dの順で空いているBFポートに移送される。この際、図5に示すように、移送先のBFポート(51a〜51dのいずれか)がキャッチャ31の円弧軌跡C上に位置付けられるように水平移動モータ53が制御され、可動設置部50が移送アーム30と同期して移動する。
【0092】
ステップS13では、キュベット設置部41のキュベットセンサ43bによる検知結果に基づいて、プレ集磁部40(キュベット設置部41)が空いたか否か(キュベット100が正常に取り出されたか否か)が判断される。プレ集磁部40(キュベット設置部41)が空いていないと判断される場合には、ステップS14に進み、所定の異常(エラー)処理が行われた後、処理が終了する。
【0093】
プレ集磁部40(キュベット設置部41)が空いたと判断された場合には、ステップS15に進み、移送先のBFポート(51a〜51dのいずれか)のキュベットセンサ55b(図3参照)による検知結果に基づいて、移送先のBFポート(51a〜51dのいずれか)にキュベット100を移送することができたか否かが判断される。移送先のBFポート(51a〜51dのいずれか)に移送することができたと判断されれば、そのBFポート(51a〜51dのいずれか)へのキュベット100の移送処理が終了する。一方、移送先のBFポート(51a〜51dのいずれか)のキュベットセンサ55bによる検知が確認できない場合には、ステップS14に進み、所定の異常(エラー)処理が行われた後、処理が終了する。BFポートへの移送タイミングがくるたびにこのBFポートへの移送処理が実施されることにより、処理対象のキュベット100がプレ集磁部40から空いているBFポート(51a〜51dのいずれか)に順番に移送される。
【0094】
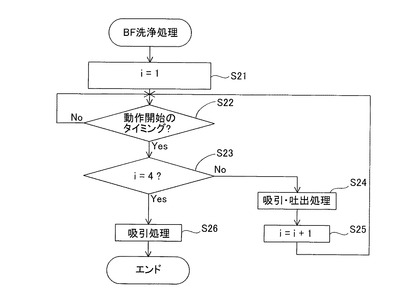
次に、図15に示すBFポート51a〜51dにおけるBF洗浄処理について説明する。上記の通り、BF洗浄処理は、3回の吸引・吐出処理(1)〜(3)と、吸引・吐出処理終了後の吸引処理(図11参照)とによって構成される。
【0095】
BF洗浄処理では、ステップS21において、吸引・吐出処理の実施回数を示す変数iが「1」にセット(初期化)される。そして、ステップS22において、処理動作の開始タイミング(タイミングt3、t4、t5、t6等)であるか否かが判断される。処理動作の開始タイミングでなければ、次の動作開始タイミングまでこのステップS22の判断が繰り返される。
【0096】
処理動作の開始タイミングがくると、ステップS23に進み、変数iが「4」か否かが判断される。変数iが「4」でない場合には、ステップS24に進んで吸引・吐出処理が実施される。吸引・吐出処理では、図11に示したように、各処理が所定のタイミングで実施されるように、可動設置部50、ノズル部60、撹拌部70等の各部が制御される。
【0097】
吸引・吐出処理が終了すると、ステップS25において、吸引・吐出処理の実施回数を示す変数iに「1」が加算される。そして、ステップS22に進み、次の動作開始タイミングまで待機する。このステップS22〜S25が3回繰り返される(吸引・吐出処理が3回実施される)と変数iが「4」になるため、ステップS23からステップS26に進む。
【0098】
ステップS26では、吸引処理が行われる。吸引処理では、図12に示したように、各処理が所定のタイミングで実施されるように、可動設置部50、ノズル部60、撹拌部70等の各部が制御される。このステップS26の吸引処理の完了によって、BFポート51a〜51dにおけるBF洗浄処理が完了する。BFポート51a〜51dにおけるBF洗浄処理は、各BFポート51a〜51d毎に判断されるため、図10に示したように各BFポート51a〜51dにおける処理の段階(何回目の吸引・吐出処理か)はBFポートによって異なる。
【0099】
次に、図16に示すBFポート51a〜51dから反応部9へのキュベット100の移送処理について説明する。
【0100】
反応部9への移送処理では、ステップS31において、反応部9へのキュベット100の移送タイミング(タイミングt7等)(図10参照)であるか否かが判断される。反応部9への移送タイミングでなければ、BFポート51a〜51dから反応部9へのキュベット100の移送は実施されない。
【0101】
反応部9へのキュベット100の移送タイミングである場合には、ステップS32において、可動設置部50が駆動されて移送対象のキュベット100がセットされたBFポート51a〜51dをキャッチャ31の円弧軌跡C(図5参照)上に位置付けるとともに、移送アーム30(アーム回転モータ34およびアーム昇降モータ35)が駆動されてBFポート51a〜51dの移送対象のキュベット100がキャッチャ31によって取り出される。そして、円弧軌跡C上の所定の返却位置240(図2参照)で反応部9のキュベット保持部9aにキュベット100がセットされる。
【0102】
ステップS33では、移送対象のキュベット100を保持していたBFポート51a〜51dのキュベットセンサ55bによる検知結果に基づいて、BFポート51a〜51dが空いたか否か(キュベットが正常に取り出されたか否か)が判断される。
【0103】
BFポート51a〜51dが空いた場合には、BFポート51a〜51dから反応部9へのキュベット100の移送処理が終了する。一方、移送対象のキュベット100を保持していたBFポート51a〜51dのキュベットセンサ55bによる検知(キュベット100の検知が無くなったこと)が確認できない場合には、BFポート51a〜51dが空いていない判断され、ステップS34に進み、所定の異常(エラー)処理が行われた後、処理が終了する。反応部9への移送タイミングがくるたびにこの反応部9への移送処理が実施されることにより、BF洗浄処理の完了したキュベット100から順番に、BFポート51a〜51dから反応部9へ移送される。
【0104】
本実施形態では、上記のように、複数のBFポート51a〜51dと、複数のBFポート51a〜51dにそれぞれ対応して設けられた複数のノズル61a〜61dを有するノズル部60とを設け、BF分離処理を各々のBFポート51a〜51dと各BFポート51a〜51dに対応するノズル61a〜61dとで並行して行うように構成することによって、BF分離処理を複数のキュベット100に対して並行して行うことができるので、免疫分析装置1の検体処理能力を向上させることができる。さらに、各々のBFポート51a〜51dに配置された各々のキュベット100に対するBF分離処理を、各々のBFポート51a〜51dにそれぞれ対応した各々のノズル61a〜61dにより個別に完了するように構成することによって、1つのキュベット100に対するBF分離処理を、キュベット100が配置されたBFポート51a〜51dに対応するノズル61a〜61dによってそれぞれ完了させることができるため、複数のノズル61a〜61dのうち特定のノズルのみが他のノズルよりも高度に汚染されるという事態を回避することができる。このため、複数のノズル61a〜61dを用いて複数のキュベット100に対するBF分離処理を並行して行うように構成した場合にも、特定のノズル61a〜61dの洗浄にのみ長時間を要することがないとともに、次検体へのキャリーオーバの発生を抑制することができる。これらにより、本実施形態による免疫分析装置1では、キャリーオーバの発生を抑制しながら、免疫分析装置1の検体処理能力を向上させることができる。
【0105】
また、本実施形態では、上記のように、CPU2aは、各々のBFポート51a〜51dに配置された各々のキュベット100内への洗浄液の吐出および液体吸引を対応する各ノズル61a〜61dにより複数回行うことでBF分離処理を完了するようにノズル部60を制御する。このように構成すれば、各々のBFポート51a〜51dにおいて、対応するノズル61a〜61dによってキュベット100内への洗浄液の吐出およびキュベット100内の液体の吸引を複数回繰り返すため、キュベット100内の未反応物質の濃度を低下させていく過程でノズル61a〜61dに付着している汚れを併せて低減させることができる。この結果、各々のBFポート51a〜51dにおいて、BF分離処理が完了した時点でノズル61a〜61dに付着している汚れが低減された状態となっているため、ノズル61a〜61dの洗浄に要する時間を減少させることができる。
【0106】
また、本実施形態では、上記のように、複数のノズル61a〜61dの上下移動に共用される1つのノズル昇降モータ63が設けられている。このように構成すれば、複数のノズル61a〜61dを共通の駆動部(ノズル昇降モータ63)で上下移動させることができるため、装置構成を簡略化させることができる。
【0107】
また、本実施形態では、上記のように、CPU2aは、BFポート51a〜51dに配置されたキュベット100に対するBF分離処理の途中において、BFポート51a〜51dに対応したノズル61a〜61dが上方に移動されてキュベット100から抜き出されたときに、キュベット100が配置されていないBFポート51a〜51dへ他のキュベット100を移送するように移送アーム30を制御する。このように構成すれば、同期して上下移動する複数のノズル61a〜61dが上方に移動されてキュベット100から抜き出されたときに、キュベット100が配置されていないBFポート(51a〜51dのいずれか)へキュベット100を移送すればよいので、ノズル昇降モータ63の制御を簡略化させつつ、複数のキュベット100をBF分離処理の途中で順次BFポート51a〜51dに移送することができる。
【0108】
また、本実施形態では、上記のように、複数の撹拌キャッチャ71a〜71dの上下移動に共用される1つの撹拌部昇降モータ73が設けられている。このように構成すれば、複数の撹拌キャッチャ71a〜71dを共通の駆動部(撹拌部昇降モータ73)で上下移動させることができるため、装置構成を簡略化させることができる。
【0109】
また、本実施形態では、上記のように、CPU2aは、プレ集磁部40にキュベット100が配置された後に、キュベット100を1次BF分離部11のいずれかのBFポート51a〜51dに移送するように移送アーム30を制御し、移送先のBFポート(51a〜51dのいずれか)に配置されたキュベット100内の液体の吸引を開始するようにノズル部60を制御する。このように構成すれば、各BFポート51a〜51dにキュベット100が移送される前に、プレ集磁部40で予めキュベット100内の磁性粒子を捕集しておくことができるので、各BFポート51a〜51dにおいて磁性粒子を捕集するのに要する時間を短縮することができる。その結果、キュベット100内の液体の吸引動作をより早く開始することができる。
【0110】
また、本実施形態では、上記のように、複数のキュベット100が同一の搬送経路(反応部9および移送アーム30による搬送経路)を経由した後、移送アーム30によりキュベット100がいずれかのBFポート51a〜51dに搬送されるように構成されている。このように構成すれば、複数のBFポート51a〜51dに容器を移送する移送アーム30までのキュベット100の搬送経路を共通化することができるので、複数のBFポート51a〜51dの各々において並行してBF分離処理を行う構成においても、免疫分析装置1の装置構成および動作制御を簡略化させることができる。
【0111】
また、本実施形態では、上記のように、CPU2aは、移送アーム30に保持されたキュベット100の回転移動の軌道上に、1次BF分離部11のBFポート51a〜51dが位置するように、水平移動モータ53を制御する。このように構成すれば、回転軸36周りに移送アーム30を回転させる簡素な構成でも、移送アーム30の円弧軌道C上にBFポート51a〜51dを移動させることによって複数のBFポート51a〜51dの各々にキュベット100を移送することができる。
【0112】
また、本実施形態では、上記のように、CPU2aは、反応部9の取出位置230にあるキュベット100を移送アーム30により取り出し、取り出したキュベット100を1次BF分離部11のBFポート51a〜51dに移送アーム30により移送し、1次BF分離部11のBFポート51a〜51dから移送アーム30によりキュベット100を取り出して反応部9の返却位置240に移送するように、アーム回転モータ34を制御可能に構成されている。このように構成すれば、共通の移送アーム30によって、反応部9からBFポート51a〜51dのいずれかへのキュベット100の移送と、BFポート51a〜51dから反応部9へのキュベット100の移送とを行うことができるので、装置構成をさらに簡略化させることができる。
【0113】
また、本実施形態では、上記のように、CPU2aは、取出位置230から複数のキュベット100を1つの移送アーム30により順次取り出し、取り出したキュベット100を1次BF分離部11のそれぞれのBFポート51a〜51dに順次移送するとともに、BF分離処理の完了したキュベット100から順に1つの移送アーム30により返却位置240に移送するようにアーム回転モータ34を制御し、BF分離処理を、各BFポート51a〜51dと各BFポート51a〜51dに対応するノズル61a〜61dとで部分的に並行して実行させる。このように構成すれば、1つの移送アーム30によって、それぞれのBFポート51a〜51dにキュベット100を順次移送するとともに、BF分離処理の完了したキュベット100を順次反応部9に返却することができるので、装置構成を簡略化させることができる。この場合にも、キュベット100が配置されたBFポート51a〜51dからBF分離処理を開始して、各BFポート51a〜51dで部分的に処理を並行して行うことができるので、免疫分析装置1の検体処理能力の向上を図ることができる。
【0114】
なお、今回開示された実施形態は、すべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は、上記した実施形態の説明ではなく特許請求の範囲によって示され、さらに特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれる。
【0115】
たとえば、上記実施形態では、本発明の分析装置を免疫分析装置1に適用した例を示したが、本発明はこれに限られない。磁性粒子を含む試薬を用いて分析する分析装置であれば本発明は適用可能であり、免疫分析装置以外の分析装置にも適用可能である。例えば、BF分離処理を利用して特定のDNAを抽出する装置に本発明を適用してもよい。
【0116】
また、上記実施形態では、1つのプレ集磁部を設けた例を示したが、本発明はこれに限られない。本発明では、複数のプレ集磁部を設けてもよい。
【0117】
また、上記実施形態では、プレ集磁部を1次BF分離部(2次BF分離部)に設けた例を示したが、本発明はこれに限られない。本発明は、プレ集磁部を1次(2次)BF分離部とは別個に設けて、プレ集磁部で予め集磁処理が行われたキュベットを1次(2次)BF分離部に移送する構成であってもよい。
【0118】
また、上記実施形態では、4つのBFポートを設けた例を示したが、本発明はこれに限られない。本発明では、2つ〜3つ、または、5つ以上のBFポートを設けてもよい。
【0119】
また、上記実施形態では、1次(2次)BF分離部に設けた1つの移送アームにより各BFポートにキュベットを移送するように構成した例を示したが、本発明はこれに限られない。本発明では、移送アームを複数設けてもよい。また、移送アームを1次(2次)BF分離部とは別個に設けてもよい。たとえば、1次BF分離部と2次BF分離部とに共通の移送アームを1次(2次)BF分離部とは別個に設けてもよい。
【0120】
また、上記実施形態では、キュベット設置部にセットされたキュベットを移送アームのキャッチャにより取り出して、各BFポートに移送するように構成した例を示したが、本発明はこれに限られない。たとえば、コンベヤなどの容器移送部によってキュベット設置部から各BFポートにキュベットを移送するように構成してもよい。
【0121】
また、上記実施形態では、4つのBFポートと、4つのノズルと、4つの撹拌キャッチャとを、それぞれ、1つの水平移動モータと、1つのノズル昇降モータと、1つの撹拌部昇降モータとによって移動させるように構成した例を示したが、本発明はこれに限られない。本発明では、各BFポート、ノズルおよび撹拌キャッチャにそれぞれ個別に駆動部を設けて、互いに独立して移動させるようにしてもよい。また、たとえば、BFポートのみ個別に移動するようにしてもよい。
【0122】
また、上記実施形態では、BF分離処理に関わる各部の動作制御を測定機構部2のCPU2aにより行うように構成した例を示したが、本発明はこれに限られない。たとえば、制御装置4のCPU4aがBF分離処理に関わる各部の動作制御を行うように構成してもよいし、制御装置4のCPU4aと測定機構部2のCPU2aとの両方が共同で動作制御を行うように構成してもよい。
【0123】
また、上記実施形態では、各BFポートにおけるBF洗浄処理を、対応するノズルが洗浄液の吐出と液体吸引とを複数回行うことによって完了させるように構成した例を示したが、本発明はこれに限られない。本発明では、対応するノズルが洗浄液の吐出と液体吸引とを1回だけ行うように構成してもよい。
【0124】
同様に、上記実施形態では、各BFポートにおけるBF洗浄処理を、3回の吸引・吐出処理と1回の吸引処理とによって構成した例を示したが、本発明はこれに限られない。たとえば、吸引・吐出処理が1回または2回でもよいし、4回以上でもよい。吸引処理を複数回行ってもよいし、吸引処理が無くてもよい。BF洗浄処理の内容は、装置(1次(2次)BF分離部)の性能に応じて設定すればよい。
【0125】
また、上記実施形態では、4つのBFポートのいずれかにキュベットが搬送される前のプレ集磁部までのキュベットの搬送経路が同一となるように構成した例を示したが、本発明はこれに限られない。本発明では、たとえばプレ集磁部を複数設けて、反応部における搬送経路のみが同一となるようにしてもよい。また、搬送経路を共通化せずに、キュベットを異なる搬送経路で各BFポートに搬送するように構成してもよい。
【符号の説明】
【0126】
1 免疫分析装置
2a CPU
9 反応部
11 1次BF分離部
12 2次BF分離部
12a、30 移送アーム
34 アーム回転モータ
40 プレ集磁部
51a、51b、51c、51d BFポート
53 水平移動モータ
60 ノズル部
61a、61b、61c、61d ノズル
63 ノズル昇降モータ
70 撹拌部
71a、71b、71c、71d 撹拌キャッチャ
73 撹拌部昇降モータ
100 キュベット
230 取出位置
240 返却位置
【技術分野】
【0001】
本発明は、分析装置に関し、特に、磁性粒子を含む試薬を用いて検体に含まれる目的物質を分析する分析装置に関する。
【背景技術】
【0002】
従来、磁性粒子を含む試薬を用いて検体に含まれる目的物質を分析する分析装置が知られている(たとえば、特許文献1および2参照)。このような分析装置では、目的物質を含む免疫複合体と未反応物質とを分離するBF(Bound−Free)分離処理が行われる。BF分離処理では、検体中の分析対象(抗原または抗体)と、分析対象と特異的に結合する反応物質を結合させた磁性粒子とが反応した免疫複合体を磁力により反応容器の内壁に捕集し、反応容器への洗浄液の供給および反応容器内の液体の吸引を行うことにより、反応容器の内壁に捕集された免疫複合体を残して反応容器内の未反応物質が除去される。
【0003】
上記特許文献1には、磁気分離器、不純物吸引機構、洗浄液吐出機構をそれぞれ1つずつ備え、磁気分離器に移送された反応容器内で不純物吸引機構による吸引と反応容器への洗浄液の吐出とを繰り返すことにより、BF分離処理を行う分析装置が開示されている。
【0004】
また、上記特許文献2には、反応容器を搬送する移送体と、移送体による反応容器の搬送方向に沿って設けられた3つの洗浄用ポートと、3つの洗浄用ポートにそれぞれ対応して設けられ、不純物の吸引と洗浄液の吐出とを行う3つのBFノズルとを有するBF分離機構を備えた分析装置が開示されている。上記特許文献2に記載のBF分離機構では、反応容器が移送体により3つの洗浄用ポートに順次搬送されていき、3つの洗浄用ポートの各々で不純物の吸引と洗浄液の吐出とが2回ずつ実施される。つまり、1つの反応容器が3つの洗浄用ポートを経由して、1つの反応容器について不純物の吸引と洗浄液の吐出とが合計6回実施されることにより、BF分離処理が完了される。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2008−209330号公報
【特許文献2】特開2001−91521号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、上記特許文献1に記載の分析装置では、一度に1つの反応容器に対するBF分離処理を行うことしかできないため、多数の反応容器を処理する場合にはBF分離処理に時間がかかり、その結果、分析装置の検体処理能力を向上させることが困難となるという問題点がある。
【0007】
また、上記特許文献2に記載の分析装置では、反応容器の搬送方向の上流側に位置する洗浄用ポートのBFノズルが、毎回、未反応物質の濃度が高い試料内に挿入されて吸引や吐出を行うことになるため、上流側の洗浄用ポートのBFノズルは、下流側の洗浄用ポートのBFノズルよりも汚染されてしまう。このため、次の検体へのキャリーオーバ(前検体に含まれる物質の次検体への持ち越し)の発生を防ぐために上流側のBFノズルだけ長い時間をかけて洗浄すると、上流側のBFノズルの洗浄が完了するまでBF分離処理が開始できずに分析装置の検体処理能力を向上させることが困難となるという問題点がある。また、処理効率を考慮して上流側のBFノズルと下流側のBFノズルとで洗浄時間を同一にした場合には、汚染度の高い上流側のBFノズルに付着した汚れによって次の検体へのキャリーオーバが生じるおそれがあるという問題点が生じることになる。
【0008】
この発明は、上記のような課題を解決するためになされたものであり、本発明の1つの目的は、キャリーオーバの発生を抑制しながら、磁性粒子を用いて検体中の目的物質を分析する分析装置の検体処理能力を向上させることが可能な分析装置を提供することである。
【課題を解決するための手段および発明の効果】
【0009】
上記目的を達成するために、この発明の一の局面による分析装置は、検体に含まれる目的物質を、磁性粒子を含む試薬を用いて分析する分析装置であって、磁性粒子を含む液体試料を収容した容器がそれぞれ配置され、配置された容器内の磁性粒子を磁気的に捕集する複数の第1磁気捕集部と、複数の第1磁気捕集部にそれぞれ対応する複数のノズルとを備え、当該複数のノズルにより、複数の第1磁気捕集部に配置された複数の容器内への洗浄液の吐出および容器内の液体の吸引を行う目的物質分離部と、容器を複数の第1磁気捕集部のいずれかに移送する容器移送部と、各々の第1磁気捕集部に配置された容器内への洗浄液の吐出および容器内の液体の吸引を、対応する各々のノズルにより並行して行いながら、各々の第1磁気捕集部に配置された容器に対する目的物質分離処理を、対応した各々のノズルにより個別に完了するように、目的物質分離部を制御する制御部とを備える。
【0010】
この発明の一の局面による分析装置では、上記のように、複数の第1磁気捕集部と、複数の第1磁気捕集部にそれぞれ対応する複数のノズルとを設け、各々の第1磁気捕集部に配置された容器内への洗浄液の吐出および容器内の液体の吸引を、対応する各々のノズルにより並行して行いながら、各々の第1磁気捕集部に配置された容器に対する目的物質分離処理を、対応した各々のノズルにより個別に完了するように構成することによって、目的物質分離処理を複数の容器に対して並行して行うことができるので、分析装置による検体処理能力を向上させることができる。さらに、1つの容器に対する目的物質分離処理を、容器が配置された第1磁気捕集部に対応するノズルによって完了させることができるため、複数のノズルのうち特定のノズルのみが他のノズルよりも高度に汚染されるという事態を回避することができる。このため、複数のノズルを用いて複数の容器に対する目的物質分離処理を並行して行うように構成した場合にも、特定のノズルの洗浄にのみ長い時間を要することがないとともに、次の検体へのキャリーオーバの発生を抑制することができる。これらにより、この発明の一の局面による分析装置では、キャリーオーバの発生を抑制しながら、磁性粒子を用いて検体中の目的物質を分析する分析装置の検体処理能力を向上させることができる。
【0011】
上記一の局面による分析装置において、好ましくは、制御部は、各々の第1磁気捕集部に配置された容器内への洗浄液の吐出および容器内の液体の吸引を対応する各々のノズルにより複数回行うことで、各々の第1磁気捕集部に配置された容器に対する目的物質分離処理を完了するように目的物質分離部を制御可能に構成されている。このように構成すれば、各々の第1磁気捕集部において、対応するノズルによって容器内への洗浄液の吐出および容器内の液体の吸引を複数回繰り返すため、容器内の未反応物質の濃度を段階的に低下させることができる。これにより、容器内の未反応物質の濃度が低下していく過程でノズルに付着している汚れを併せて低減させることができる(ノズルに付着する汚れの濃度も低下していく)。この結果、各々の第1磁気捕集部において、目的物質分離処理が完了した時点でノズルに付着している汚れが低減された状態となっているため、ノズルの洗浄に要する時間を減少させることができる。
【0012】
この場合において、好ましくは、目的物質分離部は、複数のノズルの上下移動に共用される第1共用駆動部を備える。このように構成すれば、複数のノズルを共通の駆動部で上下移動させることができるため、装置構成を簡略化させることができる。
【0013】
上記目的物質分離部が第1共用駆動部を備える構成において、好ましくは、目的物質分離部は、第1共用駆動部により複数のノズルを同期して上下移動させるように構成され、制御部は、一の第1磁気捕集部に配置された一の容器内の目的物質分離処理の途中において、一の第1磁気捕集部に対応した一のノズルが上方に移動されて一の容器から抜き出されたときに、容器が配置されていない他の第1磁気捕集部へ他の容器を移送するように容器移送部を制御可能に構成されている。このように構成すれば、同期して上下移動する複数のノズルが上方に移動されて、一の第1磁気捕集部に配置された一の容器からノズルが抜き出されたときに、容器が配置されていない他の第1磁気捕集部へ他の容器を移送すればよいので、第1共用駆動部の制御を簡略化させつつ、複数の容器を目的物質分離処理の途中で順次第1磁気捕集部に移送することができる。
【0014】
上記一の局面による分析装置において、好ましくは、目的物質分離部は、複数の第1磁気捕集部にそれぞれ対応する複数の把持部と、複数の第1磁気捕集部に配置された複数の容器に対する複数の把持部の移動に共用される第2共用駆動部とを備え、複数の把持部により複数の容器を把持して当該複数の容器内の液体試料を撹拌するように構成されている。このように構成すれば、把持部により、容器内の未反応物質を拡散させてノズルによる吸引を容易にすることができるとともに、複数の把持部を共通の駆動部で上下移動させることができるため、装置構成を簡略化させることができる。
【0015】
上記一の局面による分析装置において、好ましくは、磁性粒子を含む液体試料を収容した容器が配置され、目的物質分離部の複数の第1磁気捕集部とは別個に設けられるとともに、容器内の磁性粒子を磁気的に捕集する第2磁気捕集部をさらに備え、制御部は、第2磁気捕集部に容器が配置された後に、容器を目的物質分離部のいずれかの第1磁気捕集部に移送するように容器移送部を制御可能に構成されている。このように構成すれば、第1磁気捕集部に容器が移送される前に、第2磁気捕集部で予め容器内の磁性粒子を捕集しておくことができるので、第1磁気捕集部において磁性粒子を捕集するのに要する時間を短縮することができる。その結果、容器内の液体の吸引動作をより早く開始することができる。
【0016】
上記一の局面による分析装置において、好ましくは、分析装置に供給された複数の容器を同一の搬送経路を経由した後、容器移送部により目的物質分離部のいずれかの第1磁気捕集部に搬送するように構成されている。このように構成すれば、複数の第1磁気捕集部に容器を搬送する容器移送部までの容器の搬送経路を共通化することができるので、複数の第1磁気捕集部の各々において並行して目的物質分離処理を行う構成においても、分析装置の装置構成および動作制御を簡略化させることができる。
【0017】
この場合において、好ましくは、目的物質分離部は、複数の第1磁気捕集部を水平方向に移動させる水平駆動部を含み、容器移送部は、容器を保持するアームと、所定の回転軸を中心としてアームを水平方向に回転させる回転駆動部とを含み、制御部は、アームに保持された容器の回転移動の軌道上に、目的物質分離部の第1磁気捕集部が位置するように、水平駆動部を制御可能に構成されている。このように構成すれば、軸周りにアームを回転させる簡素な構成でも、アームの回転軌道上に第1磁気捕集部を移動させることによって複数の第1磁気捕集部の各々に容器を移送することができる。
【0018】
上記容器移送部がアームと回転駆動部とを含む構成において、好ましくは、磁性粒子を含む試薬と検体とが収容された容器を保持する反応部をさらに備え、制御部は、反応部の第1の所定位置にある容器をアームにより取り出し、取り出した容器を目的物質分離部の第1磁気捕集部にアームにより移送し、目的物質分離部の第1磁気捕集部からアームにより容器を取り出して反応部の第2の所定位置に移送するように、回転駆動部を制御可能に構成されている。このように構成すれば、共通のアームによって、反応部から第1磁気捕集部のいずれかへの容器の移送と、第1磁気捕集部から反応部への容器の移送とを行うことができるので、装置構成をさらに簡略化させることができる。
【0019】
上記反応部を備える構成において、好ましくは、容器移送部は、1つのアームを含み、制御部は、第1の所定位置から複数の容器を1つのアームにより順次取り出し、取り出した容器を目的物質分離部のそれぞれの第1磁気捕集部に順次移送するとともに、目的物質分離処理が完了した容器から順に1つのアームにより第2の所定位置に移送するように回転駆動部を制御することが可能に構成されている。このように構成すれば、1つのアームによって、それぞれの第1磁気捕集部に容器を順次移送するとともに、目的物質分離処理の完了した容器を順次反応部に返却することができるので、装置構成を簡略化させることができる。この場合にも、容器が配置された第1磁気捕集部から目的物質分離処理を開始して、それぞれの第1磁気捕集部で部分的に処理を並行して行うことができるので、分析装置による検体処理能力の向上を図ることができる。
【図面の簡単な説明】
【0020】
【図1】本発明の一実施形態による免疫分析装置の全体構成を示した斜視図である。
【図2】本発明の一実施形態による免疫分析装置の全体構成を示した平面図である。
【図3】本発明の一実施形態による免疫分析装置の構成を説明するためのブロック図である。
【図4】本発明の一実施形態による免疫分析装置の1次BF分離部の構成を説明するための斜視図である。
【図5】図4に示した1次BF分離部の平面図である。
【図6】図4に示した1次BF分離部のプレ集磁部およびBFポートを正面側から示した模式図である。
【図7】図4に示した1次BF分離部のプレ集磁部およびBFポートを説明するための斜視図である。
【図8】図4に示した1次BF分離部のプレ集磁部の内部構造を模式的に示した断面図である。
【図9】図4に示した1次BF分離部のプレ集磁部およびBFポートの機能を説明するための模式図である。
【図10】本発明の一実施形態による免疫分析装置の1次BF分離部によるBF分離処理を説明するためのタイミングチャートである。
【図11】図10に示したBF分離処理におけるBF洗浄処理(吸引・吐出処理)を説明するためのタイミングチャートである。
【図12】図10に示したBF分離処理におけるBF洗浄処理(吸引処理)を説明するためのタイミングチャートである。
【図13】本発明の一実施形態による免疫分析装置の1次BF分離部におけるプレ集磁部への移送処理の制御動作を示すフローチャートである。
【図14】本発明の一実施形態による免疫分析装置の1次BF分離部におけるBFポートへの移送処理の制御動作を示すフローチャートである。
【図15】本発明の一実施形態による免疫分析装置の1次BF分離部の各BFポートで実施されるBF洗浄処理の制御動作を示すフローチャートである。
【図16】本発明の一実施形態による免疫分析装置の1次BF分離部における反応部への移送処理の制御動作を示すフローチャートである。
【発明を実施するための形態】
【0021】
以下、本発明を具体化した実施形態を図面に基づいて説明する。
【0022】
まず、図1〜図9を参照して、本発明の一実施形態による免疫分析装置1の構成について説明する。
【0023】
本発明の一実施形態による免疫分析装置1は、測定対象である血液などの検体(血液試料)に含まれる抗原や抗体などを定量測定または定性測定する装置である。この免疫分析装置1は、検体(血清)に含まれる抗原に結合した捕捉抗体(R1試薬)に磁性粒子(R2試薬)を結合させた後に、結合(Bound)した抗原、捕捉抗体および磁性粒子の複合体を1次BF分離部11の磁気により捕集するとともに、未反応(Free)の捕捉抗体を含むR1試薬を除去する(即ちBF分離)ように構成されている。そして、免疫分析装置1は、磁性粒子が結合した抗原と標識抗体(R3試薬)とを結合させた後に、結合(Bound)した磁性粒子、抗原および標識抗体の複合体を2次BF分離部12の磁気により捕集するとともに、未反応(Free)の標識抗体を含むR3試薬を除去する(即ちBF分離)。さらに、免疫分析装置1は、分散液(R4試薬)、および、標識抗体との反応過程で発光する発光基質(R5試薬)を添加した後、標識抗体と発光基質との反応によって生じる発光量を測定する。免疫分析装置1は、このような工程を経て、標識抗体に結合する検体に含まれる抗原を定量的に測定している。なお、免疫分析装置1は、検体に対して複数の異なる分析項目に対応する分析が可能なように構成されている。
【0024】
また、免疫分析装置1は、図1および図2に示すように、測定機構部2と、測定機構部2に隣接するように配置された検体搬送部(サンプラ)3と、測定機構部2に電気的に接続されたPC(パーソナルコンピュータ)からなる制御装置4とを備えている。
【0025】
検体搬送部3は、検体を収容した複数の試験管が載置されたラックを搬送可能に構成されている。また、検体搬送部3は、検体を収容した試験管を検体分注アーム5による検体吸引位置220まで搬送する機能を有する。
【0026】
制御装置4は、図3に示すように、CPU4a、表示部4b、入力部4cおよび記憶部4dを含む。CPU4aは、測定機構部2により得られた測定結果を分析し、その分析結果を表示部4bに表示する機能を有する。また、記憶部4dはHDD(ハードディスクドライブ)を含み、各種プログラムや測定結果のデータなどが記憶されるように構成されている。
【0027】
また、測定機構部2は、図2に示すように、検体分注アーム5と、R1試薬分注アーム6と、R2試薬分注アーム7と、R3試薬分注アーム8と、反応部9と、キュベット供給部10と、1次BF分離部11と、2次BF分離部12と、ピペットチップ供給部13と、検出部14と、R4/R5試薬供給部15と、試薬設置部16とから構成されている。
【0028】
また、図3に示すように、測定機構部2における各機構部(反応部9および1次BF分離部11など)は、測定機構部2に設けられたCPU2aにより制御されている。また、CPU2aは、検体搬送部3および制御装置4と通信可能に接続されており、制御装置4からの動作命令の受信、および、制御装置4への測定結果データの送信や、検体搬送部3への動作命令の送信などを行う機能を有する。
【0029】
図2に示すキュベット供給部10は、複数のキュベット100(図7参照)を収納可能に構成されており、検体分注アーム5による検体吐出位置200にキュベットを1つずつ順次供給する機能を有している。キュベット100は、図7に示すように、上端が開放され、下端が丸みを帯びた底部を有するとともに、水平断面において内側面および外側面が円形状に形成された細長い円筒形状の容器である。キュベット100は、測定機構部2の各所に設けられたキャッチャにより把持可能なように、上端部の外側面から外側に突出する突出部が形成されている。
【0030】
図2に示すように、R1試薬分注アーム6は、試薬設置部16に設置されたR1試薬容器からピペット6aによりR1試薬を吸引し、吸引したR1試薬を検体吐出位置200に載置されたキュベット100に分注(吐出)するように構成されている。また、R1試薬分注アーム6は、キャッチャにより検体吐出位置200に載置されたキュベット100を反応部9に移送する機能を有している。
【0031】
ピペットチップ供給部13は、投入された複数のピペットチップを1つずつ検体分注アーム5によるチップ装着位置210まで搬送する機能を有している。
【0032】
検体分注アーム5は、移動可能に構成され、チップ装着位置210においてピペットチップを装着した後、検体搬送部3により検体吸引位置220に搬送された試験管内の検体を吸引し、R1試薬分注アーム6によりR1試薬が分注された検体吐出位置200のキュベットに検体を分注(吐出)する機能を有している。
【0033】
R2試薬分注アーム7は、試薬設置部16に設置されたR2試薬容器からピペット7aによりR2試薬を吸引するとともに、R1試薬および検体を収容するキュベット100に吸引したR2試薬を分注(吐出)するように構成されている。
【0034】
反応部9は、平面的に見て、略円形形状を有する試薬設置部16の周囲を取り囲むように略円環状に形成されている。また、反応部9は、回転可能に構成されており、キュベット保持部9aに保持されたキュベット100を各種処理(試薬の分注など)が行われる各々の処理位置まで移動させる機能を有している。具体的には、反応部9は、矢印A1方向に回転して、R1試薬分注アーム6により反応部9に移送されたキュベット100を、R2試薬分注アーム7、1次BF分離部11、R3試薬分注アーム8、2次BF分離部12およびR4/R5試薬供給部15のそれぞれの処理位置にこの順序で搬送した後、検出部14まで移送する。
【0035】
1次BF分離部11は、検体、R1試薬およびR2試薬を収容するキュベット100を、移送アーム30のキャッチャ31により反応部9から取り出して、キュベット100内の試料から未反応のR1試薬(不要成分)と磁性粒子とを分離(BF分離)するように構成されている。そして、BF分離処理が完了した後、1次BF分離部11は、移送アーム30のキャッチャ31によりキュベット100を反応部9に戻すように構成されている。なお、1次BF分離部11の構造については、後に詳細に説明する。
【0036】
R3試薬分注アーム8は、試薬設置部16に設置されたR3試薬容器からピペット8aによりR3試薬を吸引するように構成されている。そして、R3試薬分注アーム8は、1次BF分離部11によるBF分離後の試料を収容するキュベット100に、吸引したR3試薬を分注(吐出)するように構成されている。
【0037】
2次BF分離部12は、1次BF分離部11によるBF分離後の試料およびR3試薬を収容するキュベット100を、移送アーム12aのキャッチャ12bにより反応部9から取得して、キュベット内の試料から未反応のR3試薬(不要成分)と磁性粒子とを分離(BF分離)するように構成されている。その後、2次BF分離部12は、移送アーム12aのキャッチャ12bによりキュベット100を反応部9に戻すように構成されている。
【0038】
R4/R5試薬供給部15は、チューブにより、2次BF分離部12によるBF分離後の試料を収容するキュベット100に、R4試薬およびR5試薬を順に分注するように構成されている。
【0039】
検出部14は、所定の処理が行なわれた検体の抗原に結合する標識抗体と発光基質との反応過程で生じる光を光電子増倍管(Photo Multiplier Tube)で取得することにより、その検体に含まれる抗原の量を測定するために設けられている。なお、キュベット100は、キャッチャ17aを有するキュベット移送部17により反応部9から取り出されて検出部14にセットされる。また、キュベット移送部17は、キュベット100を検出部14に移送する他に、検出部14による測定終了後のキュベット100を検出部14から取り出して廃棄部に廃棄する機能を有する。
【0040】
試薬設置部16は、捕捉抗体を含むR1試薬が収容されたR1試薬容器と、磁性粒子を含むR2試薬が収容されたR2試薬容器と、標識抗体を含むR3試薬が収容されたR3試薬容器とを、それぞれ複数設置するために設けられている。
【0041】
次に、1次BF分離部11の構成について詳細に説明する。なお、2次BF分離部12の構成は1次BF分離部11と同様であるので、説明を省略する。
【0042】
図4〜図6に示すように、1次BF分離部11は、キュベット100を取り出すためのキャッチャ31を有する移送アーム30と、プレ集磁部40と、可動設置部50と、ノズル部60と、撹拌部70(図5参照)とを主として備えている。可動設置部50には、検体、R1試薬およびR2試薬を収容したキュベット100を設置してBF分離処理を行うためのBFポート51a〜51d(図5参照)が4つ並んで設けられている。ノズル部60には、これら4つのBFポート51a〜51dに対応する4つのノズル61a〜61d(図6参照)が設けられている。撹拌部70には、4つのBFポート51a〜51dに対応する4つの撹拌キャッチャ71a〜71d(図5参照)が設けられている。これにより、1次BF分離部11では、4つのBFポート51a〜51dのそれぞれに設置される最大4つのキュベット100(キュベット100内の試料)に対して、並行してBF分離処理を行うことが可能なように構成されている。なお、図6では、BFポート51a〜51dの構造を示すために、移送アーム30や可動設置部50の上部カバー部分などを取り除いた状態を模式的に示している。
【0043】
図5に示すように、移送アーム30は、先端にキュベット100を把持可能なキャッチャ31を有し、プレ集磁部40と、可動設置部50の4つのBFポート51a〜51dと、反応部9のキュベット保持部9a(図2参照)とのそれぞれの間でキュベット100の移送を行う機能を有する。具体的には、図4に示すように、移送アーム30は、ベルトおよびプーリからなる伝達機構32および33を介してそれぞれ接続されたアーム回転モータ34とアーム昇降モータ35とにより、上下(Z方向)に延びる回転軸36を中心に回動(旋回)可能で、かつ、上下(Z方向)に昇降可能に構成されている。これにより、キャッチャ31は、プレ集磁部40の後述するキュベット設置部41と、BFポート51a〜51dと、キュベット保持部9a(取出位置230および返却位置240、図2参照)とを通過する所定の円弧軌跡C(図5参照)上で移動し、上記の各部でのキュベット100の設置および取り出しが可能となっている。なお、移送アーム30には、回転軸36と一体的に回転する検知板30aが設けられており、光透過型のセンサ30bによって検知板30aを検出可能となっている。このセンサ30bの検知結果に基づいて、移送アーム30の旋回方向の原点セットが行われる。
【0044】
プレ集磁部40は、可動設置部50の各BFポート51a〜51dにおいて実施されるBF分離処理に先立って、キュベット100内の磁性粒子を予め捕集しておく機能を有する。プレ集磁部40は、1次BF分離部11の手前側(矢印Y1方向側)の位置において、移送アーム30(キャッチャ31)の円弧軌跡C上に設けられた1つのキュベット設置部41を備えている。図8に示すように、キュベット設置部41は、検体、R1試薬およびR2試薬を収容するキュベット100を配置可能に構成され、キュベット100の外形形状に対応した形状を有する穴部からなる。また、図7に示すように、プレ集磁部40は、キュベット100内の磁性粒子を磁気的に捕集するための直方体形状の2個1組の永久磁石42aおよび42bを内蔵している。
【0045】
永久磁石42aおよび42bは、図5に示すように、平面的に見て、キュベット設置部41にセットされたキュベット100と重なるように配置されている。より具体的には、図7に示すように、永久磁石42aおよび42bは、キュベット設置部41にセットされたキュベット100の直下の位置に配置されており、この位置でキュベット100内の磁性粒子を下方から磁気的に捕集する(集磁する)ように構成されている。なお、キュベット設置部41の底部は、キュベット100の底部の形状に対応して狭まる曲面状に形成されているとともに、セットされたキュベット100の底部が露出するように開口部41a(図8参照)が形成されている。永久磁石42aおよび42bは、キュベット100がキュベット設置部41にセットされた状態で、キュベット設置部41の開口部41aから露出するキュベット100の底部(外底面)と接触する位置に配置されている。なお、磁石42aおよび42bは、キュベット設置部41の開口部41aから露出するキュベット100の底部(外底面)から僅かに間隔を開ける位置に配置されてもよい。
【0046】
また、図9に示すように、2個1組の永久磁石42aおよび42bは、横並びに隣接して配置され、一方の永久磁石42aの上面側がN極(下面側がS極)となるとともに、他方の永久磁石42bの上面側がS極(下面側がN極)となるように設置されている。これにより、横並びに配置された2個1組の永久磁石42aおよび42bの中間の位置(境界線上)で最も磁力が強くなる。永久磁石42aおよび42bは、この最も磁力が強くなる中間部がキュベット設置部41にセットされたキュベット100の下端部の直下に位置するように配置されている。これにより、キュベット100内の磁性粒子がキュベット100の内底面(最も低い位置)に確実に捕集される。なお、プレ集磁部40は非磁性のアルミ(合金)製であるため、永久磁石42aおよび42bによる磁力線(図9参照)はキュベット100を取り囲む周壁にほとんど遮られることなく突き抜けてキュベット100に到達する。
【0047】
また、図8に示すように、キュベット設置部41の側面側には、キュベット設置部41の内部への進入および内部からの退出が可能な検知片43aと、この検知片43aを検出する光透過型のキュベットセンサ43b(図8の破線参照)が設けられている。検知片43aは、キュベット100がセットされていない状態でキュベットセンサ43bを遮光している。キュベット100がキュベット設置部41内にセットされるのに伴い検知片43aが矢印R方向に回動することにより、検知片43aによる遮光が解除される(図8の一点鎖線参照)。これにより、キュベット100がプレ集磁部40(キュベット設置部41)にセットされているか否かを検知することが可能なように構成されている。
【0048】
図5に示すように、可動設置部50は、横方向(X方向)に直線状に等間隔で配置された4つのBFポート51a〜51dを備えている。可動設置部50は、ベルトおよびプーリからなる伝達機構52を介して接続された水平移動モータ53(図6参照)により、Y方向に水平移動可能に構成されている。これにより、可動設置部50は、4つのBFポート51a〜51dのそれぞれを、移送アーム30(キャッチャ31)の円弧軌跡C上の位置(キュベットセット位置)と、各BFポート51a〜51dに対応するノズル61a〜61dの直下の位置(吸引・吐出位置)と、各BFポート51a〜51dに対応する撹拌キャッチャ71a〜71dのキュベット取り出し位置とに配置させる機能を有する。なお、図5から分かるように、Y方向に移動する各BFポート51a〜51dが円弧軌跡Cと交わる位置(キュベットセット位置)は、Y方向に関して互いに異なる。このため、可動設置部50は、移送アーム30から移送されるキュベット100をBFポート51a〜51dのいずれにセットするかに応じて、Y方向の移動位置を変えるように制御される。
【0049】
また、図6に示すように、可動設置部50の各BFポート51a〜51dは、同一構造を有し、キュベット100を配置可能な穴部からなる。また、各BFポート51a〜51dには、それぞれ、直方体形状の2個一組の永久磁石54aおよび54bが設けられ、BFポート51a〜51dに設置されたキュベット100内の磁性粒子を捕集するように構成されている。BFポート51a〜51dの永久磁石54aおよび54bは、上記プレ集磁部40の永久磁石42aおよび42bとは異なり、セットされたキュベット100の側方に位置するように配置されている。具体的には、図5および図7に示すように、永久磁石54aおよび54bは、BFポート51a〜51dに設置されたキュベット100の手前側(矢印Y1方向側)の側方の位置に配置されている。
【0050】
図9に示すように、2個1組の永久磁石54aおよび54bは、上下に隣接して配置され、上方の永久磁石54aのキュベット100側(矢印Y2方向側)の側面がS極(矢印Y1方向側がN極)となるとともに、下方の永久磁石54bのキュベット100側(矢印Y2方向側)の側面がN極(矢印Y1方向側がS極)となるように設置されている。これにより、上下に配置された2個1組の永久磁石54aおよび54bの中間の高さ位置(境界線上)で最も磁力が強くなる。このため、BFポート51a〜51dに設置されたキュベット100内の磁性粒子は、永久磁石54aおよび54bによって内底面よりも上方の高さ位置における内側面側に捕集される。
【0051】
ここで、BF分離処理において、プレ集磁部40で予め磁性粒子が捕集されたキュベット100が、移送アーム30(キャッチャ31)によってプレ集磁部40から取り出されて、4つのBFポート51a〜51dのいずれかに移送されるように構成されている。このため、BFポート51a〜51dのいずれかにキュベット100が設置される時には、既にキュベット100内の磁性粒子はキュベット100の内底面側に塊状に集められた状態となっている。そして、BFポート51a〜51dのいずれかにキュベット100が設置されると、キュベット100の内底面側に集められた磁性粒子の塊が、側方の永久磁石54aおよび54bの磁力によって塊状のままキュベット100の内壁に沿って上方の内側面側の捕集位置まで移動する。なお、キュベット100がプレ集磁部40で移送アーム30によって取り出されてからBFポート51a〜51dのいずれかにセットされるまでの間はキュベット100内の磁性粒子に磁力が付与されない状態となるが、キュベット100内の磁性粒子は、磁性粒子自体の自重によってキュベット100の内底面側に集められた状態を維持する。このため、キュベット100の移送時に磁性粒子に継続的に磁力を付与しなくても、BFポート51a〜51dで迅速に磁性粒子を捕集することが可能である。
【0052】
また、図5に示すように、移送アーム30は回転軸36周りに旋回する構造を有するため、4つのBFポート51a〜51dにセットされるキュベット100は、平面的に見て、移送アーム30の回転角度に応じてそれぞれ異なる向きでセットされる。本実施形態では、上記のようにプレ集磁部40で磁性粒子がキュベット100の内底面側に捕集され、かつ、各BFポート51a〜51dでは水平断面において円形状のキュベット100の内側面側に磁性粒子が捕集される。このため、各BFポート51a〜51dにセットされる際のキュベット100の向きが移送アーム30の回転角度に応じて異なっても、各BFポート51a〜51dで磁性粒子を全く同じように捕集した状態でBF分離処理を実施することが可能である。
【0053】
なお、図7に示すように、可動設置部50の各BFポート51a〜51dにも、プレ集磁部40と同様の検知片55aと、検知片55aを検出する光透過型のキュベットセンサ55b(図3参照)とが設けられている。これにより、4つのBFポート51a〜51dの各々にキュベット100がセットされているか否かを検知することが可能である。
【0054】
図5に示すように、ノズル部60は、4つのBFポート51a〜51dに対応して横方向(X方向)の直線状に等間隔で配置された4つのノズル61a〜61dを有している。図4に示すように、ノズル部60は、ベルトおよびプーリからなる伝達機構62を介して接続されたノズル昇降モータ63により、上下方向(Z方向)に昇降可能に構成されている。したがって、4つのノズル61a〜61dはノズル部60の1つのノズル昇降モータ63により、一体的に昇降する。これにより、ノズル部60は、可動設置部50の移動により4つのBFポート51a〜51dが対応する各ノズル61a〜61dの直下の位置(吸引・吐出位置)に配置された状態で、4つのノズル61a〜61dを4つのBFポート51a〜51dにそれぞれセットされたキュベット100の内部に進入(下降)させ、または、4つのノズル61a〜61dをキュベット100の内部から退出(上昇)させる機能を有する。
【0055】
4つのノズル61a〜61dは、同一構造を有し、洗浄液を吐出するための吐出ノズルと、キュベット100内の液体(未反応物質)を吸引するための吸引ノズルと、吐出ノズルおよび吸引ノズルを洗浄するために洗浄液を吐出する洗浄ノズルとの3本のノズルが一組となった構造を有する。4つのノズル61a〜61dの下方の位置には洗浄ポートがそれぞれ設けられており、ノズル61a〜61d自身の洗浄を行うことが可能である。なお、4つのノズル61a〜61dによる吸引や吐出は、それぞれ個別に動作可能に構成されており、4つのうちのいずれかのBFポート51a〜51dにキュベット100がセットされていない場合などでは、対応するノズル61a〜61dの吸引や吐出動作を行わないように制御することが可能である。
【0056】
また、図9に示すように、ノズル61a〜61dによりキュベット100内の液体(未反応物質)の吸引を行う際には、ノズル(吸引ノズル)61a〜61dの先端がキュベット100の底部(内底面)近傍まで下降された状態で行われるように構成されている。上記のようにBFポート51a〜51dでは磁性粒子がキュベット100の底部から上方に離間した内側面側に捕集されるので、液体(未反応物質)の吸引時に磁性粒子が吸引されてしまうのを抑制することが可能である。
【0057】
図5に示すように、撹拌部70は、4つのBFポート51a〜51dに対応して横方向(X方向)の直線状に等間隔で配置された4つの撹拌キャッチャ71a〜71dを有している。図6に示すように、撹拌部70は、ベルトおよびプーリからなる伝達機構72を介して接続された撹拌部昇降モータ73により、上下方向(Z方向)に昇降可能に構成されている。このため、4つの撹拌キャッチャ71a〜71dは撹拌部70の1つの撹拌部昇降モータ73により、一体的に昇降する。これにより、撹拌部70は、各BFポート51a〜51dにセットされたキュベット100をそれぞれ把持可能なキュベット取り出し位置に撹拌キャッチャ71a〜71dが配置されるように下降することにより、4つのBFポート51a〜51dのキュベット100を対応する撹拌キャッチャ71a〜71dに把持させる機能を有する。また、撹拌部70は、各BFポート51a〜51dのキュベット100を対応する撹拌キャッチャ71a〜71dで把持したまま上昇または下降することにより、BFポート51a〜51dからキュベット100を取り出し、または取り出したキュベット100を各BFポート51a〜51dに返却することが可能である。
【0058】
4つの撹拌キャッチャ71a〜71dには、それぞれ撹拌キャッチャ71a〜71dを揺動(振動)させるための撹拌モータ74a〜74d(図3参照)が設けられている。これにより、撹拌キャッチャ71a〜71dは、それぞれ、キュベット100を把持してBFポート51a〜51dから取り出した状態(磁性粒子が永久磁石54aおよび54bにより捕集されていない状態)で撹拌モータ74a〜74dを駆動することによって、キュベット100内部の磁性粒子を撹拌する機能を有する。これにより、塊状に捕集された磁性粒子の間に挟まれた未反応物質などを分散させることができる。なお、4つの撹拌キャッチャ71a〜71dにそれぞれ設けられた撹拌モータ74a〜74dは、個別に駆動させることが可能である。このため、4つのうちのいずれかのBFポート51a〜51dにキュベット100がセットされていない場合などには、対応する撹拌キャッチャ71a〜71dによる撹拌動作も行わないように制御することが可能である。
【0059】
以上の構成によって、1次BF分離部11では、4つのBFポート51a〜51dのそれぞれにおいて、対応するノズル61a〜61dと撹拌キャッチャ71a〜71dとによって個別にBF分離処理を行うことが可能である。BF分離処理においては、BFポート51a〜51dにおいて磁性粒子を捕集した状態で対応するノズル61a〜61dによってキュベット100内の液体を吸引(除去)する動作と、対応するノズル61a〜61dによってキュベット100内に洗浄液を吐出する動作と、対応する撹拌キャッチャ71a〜71dによってキュベット100内の試料を撹拌する動作とが複数回にわたって繰り返し行われる。これにより、磁性粒子を残したままキュベット100内部の未反応物質の濃度を段階的に低下させていくことによって、磁性粒子、抗原および捕捉抗体の複合体と、未反応物質とを分離(BF分離)する。
【0060】
また、本実施形態では、図2に示すように、プレ集磁部40に移送されるまでは、BF分離処理に供されるキュベット100はすべて同一の搬送経路(反応部9および移送アーム30による搬送経路)を経由する。そして、プレ集磁部40からBFポート51a〜51dのいずれかに移送される際に、各キュベット100はそれぞれ異なる搬送経路で移送されることになる。
【0061】
次に、図2、図3、図5および図9〜図12を参照して、本発明の一実施形態による免疫分析装置1(測定機構部2)の1次BF分離部11のBF分離処理動作について説明する。1次BF分離部11によるBF分離処理動作は、免疫分析装置1全体の測定処理動作の一部として、各種分注アームによる分注動作や、反応部9によるキュベット100の搬送と同期させるため、図10に示したタイミングチャートに従って予め設定された所定のタイミングで動作する。1次BF分離部11によるBF分離処理は、4つのBFポート51a〜51dによって最大4つのキュベット100(キュベット100内の試料)に対して並行して行われる。
【0062】
BF分離処理は、プレ集磁部40におけるプレ集磁(磁力による磁性粒子の捕集)処理と、BF洗浄処理(3回の吸引・吐出処理および吸引処理)とから主として構成されている。ここで、反応部9、プレ集磁部40および各BFポート51a〜51dへのキュベット100の移送が1つの移送アーム30によって行われるため、各BFポート51a〜51dにおける処理動作は、時間をずらしながら並行して行われる。以下では、BFポート51a(ポートA)、51b(ポートB)、51c(ポートC)、51d(ポートD)の順でそれぞれのBFポートへキュベット100が移送され、この順でBF分離処理が実施される例について説明する。
【0063】
図10に示すように、タイミングt1において、反応部9からプレ集磁部40へキュベット100が移送される。反応部9の取出位置230(図2参照)に配置されたキュベット100が移送アーム30により取り出され、プレ集磁部40へと移送される。このプレ集磁部40へのキュベット100の移送タイミングは所定の時間間隔毎に設定され、1つ目(1テスト目)のキュベット100がプレ集磁部40からBFポート51aへ移送された後に、次の(2テスト目)のキュベット100の移送タイミングt32となる。1テスト目のキュベット100がプレ集磁部40へ移送されると、タイミングt2までの所定時間の間、プレ集磁部40に保持されるプレ集磁処理が行われる。これにより、プレ集磁部40にセットされたキュベット100の底部に磁性粒子が捕集される(図9参照)。
【0064】
次に、タイミングt2において、移送アーム30(アーム回転モータ34およびアーム昇降モータ35)が駆動され、プレ集磁部40から1テスト目のキュベット100が取り出されるとともに、空いているBFポート51a(ポートA)に移送される。BFポートへの移送タイミングは所定の時間間隔毎に設定されている。1つ目(1テスト目)のキュベット100がプレ集磁部40からBFポート51aへ移送された後に、次の(2テスト目)のキュベット100のプレ集磁処理が終了すると、次の(2テスト目)のキュベット100をBFポート51b(ポートB)に移送するタイミングt38となる。
【0065】
次に、タイミングt3において、1テスト目のキュベットに対してBF洗浄処理(吸引・吐出処理)が開始される。BF洗浄処理は、1つのキュベット100(試料)について、所定の時間間隔毎に設定されたタイミングt3、t4、t5において実施される3回の吸引・吐出処理(1)〜(3)と、3回の吸引・吐出処理終了後のタイミングt6で実施される吸引処理とによって構成される。BF洗浄処理は各BFポートで同一であるので、ここではBFポート51a(ポートA)における1テスト目のキュベット100に対するBF洗浄処理を説明する。
【0066】
図11に示すように、BF洗浄処理(吸引・吐出処理)の開始タイミングt3でBFポート51aに1テスト目のキュベット100がセットされると、BFポート51aにおいてタイミングt30までの間、集磁処理が実施される。これにより、キュベット100がセットされたBFポート51aにおいて、磁性粒子がキュベット100の内側面側に捕集(図9参照)される。また、この集磁処理中に、可動設置部50が移動してノズル61a〜61dによる吸引・吐出位置(ノズル61a〜61dの直下の位置)にBFポート51a〜51dが位置付けられる。
【0067】
次に、タイミングt30において、1テスト目のキュベット100内部の液体の吸引が行われる。具体的には、図9に示すように、キュベット100内の磁性粒子を捕集した状態でノズル部60が下降され、各BFポート51a〜51dに対応するノズル61a〜61dがキュベット100内に進入するとともに、ノズル61a〜61dによって液体の吸引が行われる。なお、1テスト目では、BFポート51b〜51dにキュベット100はセットされていない(BF洗浄処理が開始していない)ので、ノズル61b〜61dはそれぞれBFポート51b〜51d内で吸引・吐出位置まで位置付けられるが、吸引動作は実施されない。以下の各処理でも同様であり、可動設置部50の移動やノズル部60および撹拌部70の昇降移動などは各BFポート51a〜51dで同期して行われるが、BF洗浄処理が開始していないBFポートでは、液体の吸引、洗浄液の吐出や撹拌は行われない。
【0068】
液体の吸引後、タイミングt31において、1テスト目のキュベット内にノズル61aから所定量の洗浄液が吐出され、ノズル部60が上昇してノズル61aがキュベット100内部から退出する。
【0069】
その後、タイミングt32において集磁処理が行われ、タイミングt33において、1テスト目のキュベット100内部の液体の吸引が行われる。タイミングt34では、ノズル61aから所定量の洗浄液が吐出され、ノズル部60が上昇してノズル61aがキュベット100内部から退出する。つまり、1回のBF洗浄処理で、集磁処理、液体の吸引および洗浄液の吐出が各2回実施される。なお、このタイミングt32において2テスト目のキュベットをプレ集磁部40へ移送するタイミングとなる。したがって、次の(2テスト目の)キュベット100のプレ集磁部40への移動処理が開始され、タイミングt35からプレ集磁が開始される。
【0070】
続いて、タイミングt35において、撹拌部70が下降され、各撹拌キャッチャ71a〜71dがキュベット取り出し位置に位置付けられるとともに、可動設置部50が移動してBFポート51aのキュベット100を対応する撹拌キャッチャ71aに把持させる。
【0071】
次に、タイミングt36において、撹拌部70(図5参照)が上昇され、把持されたキュベット100がBFポート51aから取り出されるとともに、撹拌キャッチャ71aの撹拌モータ74a(図3参照)が駆動されることにより、磁性粒子が集磁されていない状態で撹拌処理が実施される。その後、撹拌部70が下降され、キュベット100が撹拌キャッチャ71aから対応するBFポート51aに返却される。
【0072】
撹拌後、タイミングt37において、分散された磁性粒子を永久磁石54aおよび54bにより再度捕集するため、集磁処理が所定時間の間(次のタイミングt4まで)実施される。以上により、1回のBF洗浄動作が終了する。
【0073】
なお、この集磁処理の実施中にタイミングt38において、次の(2テスト目の)キュベット100のBFポート51b(ポートB)への移送処理が実施される。したがって、次に吸引・吐出処理が開始されるタイミングt4がくると、BFポート51a(ポートA)では1テスト目のキュベット100に対する2回目の吸引・吐出処理が実施され、BFポート51b(ポートB)では2テスト目のキュベット100に対するBF洗浄処理(1回目の吸引・吐出処理)が開始される。このように、BF洗浄処理中には、ノズル61a(61b〜61d)がキュベット100内部から抜き出されたときに、キュベット100を保持していない次の空きBFポート(ここでは、BFポート51b)にキュベット100が移送される。そして、BF洗浄処理の内容は同一であるので、BFポート51aとBFポート51bとで同期して同じBF洗浄処理動作が実行される。図10に示すように、3テスト目以降も同様である。
【0074】
吸引・吐出動作が3回実施されたBFポート51aでは、次のタイミングt6で吸引処理が行われる。なお、吸引処理は他のBFポートにおけるBF洗浄処理と同期して行われる。
【0075】
図12に示すように、吸引処理では、タイミングt6でBFポート51aにおいて集磁処理が実施され、タイミングt61においてノズル61aによるキュベット100内部の液体の吸引が行われる。
【0076】
タイミングt62では、1テスト目のキュベットに対して、吸引・吐出処理と異なり、再度集磁処理がタイミングt64まで実施される(洗浄液の吐出が行われない)。なお、タイミングt63では、5テスト目のキュベット100のプレ集磁部40への移送タイミングとなる。これにより、移送アーム30により5テスト目のキュベット100が反応部9からプレ集磁部40へ移送される。この5テスト目のキュベット100が、1テスト目のキュベット100に対するBF洗浄処理の完了後にBFポート51aにセットされる次のキュベット100となる。
【0077】
タイミングt64では、再度、1テスト目のキュベット100内部の液体の吸引が行われる。続いて、タイミングt65において、1テスト目のキュベットに対して、吸引・吐出処理と異なり、集磁処理が実施される(液体の吐出が行われない)。
【0078】
タイミングt66では、撹拌部70が下降されるとともに、可動設置部50が移動してBFポート51aのキュベット100を対応する撹拌キャッチャ71aに把持させる。
【0079】
次に、タイミングt67において、撹拌部70が上昇され、把持されたキュベット100がBFポート51aから取り出されるとともに撹拌キャッチャ71aの撹拌モータ74aが駆動されることにより、撹拌処理が実施される。その後、撹拌部70が下降され、キュベット100が各撹拌キャッチャ71aから対応するBFポート51aに返却される。
【0080】
以上により、吸引処理が終了する。図10に示すように、撹拌後、反応部への移送タイミングt7において、移送アーム30(アーム回転モータ34およびアーム昇降モータ35)が駆動され、BFポート51a(ポートA)からキュベット100が取り出されるとともに、所定の返却位置240(図2参照)でキュベット100が反応部9に返却される。これにより、1テスト目のキュベット100に対するBF洗浄処理が完了する。
【0081】
なお、1テスト目のキュベット100が反応部9に返却されると、タイミングt71において、プレ集磁部40から5テスト目のキュベット100が移送アーム30により取り出されるとともに、空いているBFポート51a(ポートA)に移送される。そして、BFポート51a(ポートA)では、次の(5テスト目の)キュベット100(試料)に対するBF洗浄処理が開始される。
【0082】
このようにして、BFポート51a〜51dの各々におけるBF洗浄処理は、移送アーム30によりセットされた順番で個別に開始される一方、一部の処理(吸引・吐出処理や吸引処理)を並行して実施する。そして、BFポート51a〜51dの各々においてBF洗浄処理が完了した順番で、移送アーム30により反応部9へとキュベット100が返却される。
【0083】
次に、図2、図3、図5および図10〜図16を参照して、本発明の一実施形態による免疫分析装置1(測定機構部2)の1次BF分離部11のBF分離処理における制御処理について説明する。
【0084】
BF分離処理における制御処理は、図10〜図12に示した各タイミングにおいて実施される4つの処理から構成されるとともに、これらの処理が並行して行われる。4つの処理は、具体的には、反応部9からプレ集磁部40へのキュベット100の移送処理(取出)と、プレ集磁部40からBFポート(51a〜51dのいずれか)へのキュベット100の移送処理と、BFポート51a〜51dのそれぞれにおけるBF洗浄処理(吸引・吐出処理および吸引処理)と、BFポート(51a〜51dのいずれか)から反応部9へのキュベット100の移送処理(返却)とである。なお、1次BF分離部11によるBF分離処理動作は、測定機構部2のCPU2aにより1次BF分離部11の各部が制御されることにより実施される。また、2次BF分離部12によるBF分離処理も同様であるので、説明を省略する。
【0085】
まず、図13に示す反応部9からプレ集磁部40へのキュベット100の移送処理について説明する。
【0086】
プレ集磁部40への移送処理では、ステップS1において、CPU2aによって、プレ集磁部40へのキュベット100の移送タイミング(タイミングt1、タイミングt32等)(図10参照)であるか否かが判断される。プレ集磁部40への移送タイミングでなければ、反応部9からプレ集磁部40へのキュベット100の移送は実施されない。
【0087】
プレ集磁部40へのキュベット100の移送タイミングである場合には、ステップS2において、移送アーム30により反応部9の取出位置230(図2参照)から所定のキュベット100が取り出されるとともに、プレ集磁部40のキュベット設置部41にセットされる。ステップS3では、キュベット設置部41のキュベットセンサ43bによる検知結果に基づいて、キュベット100がプレ集磁部40のキュベット設置部41にセットされたか否かが判断される。
【0088】
キュベット設置部41にセットできた場合にはプレ集磁部40へのキュベット100の移送処理が終了する。キュベットセンサ43bによる検知が確認できない場合には、ステップS4に進み、所定の異常(エラー)処理が行われた後、処理が終了する。プレ集磁部40への移送タイミングがくるたびにプレ集磁部40への移送処理が実施されることにより、処理対象のキュベット100が、順次、反応部9の取出位置230からプレ集磁部40へと移送される。
【0089】
次に、図14に示すBFポートへのキュベット100の移送処理について説明する。
【0090】
まず、ステップS11において、BFポート(51a〜51dのいずれか)への移送タイミング(タイミングt2、タイミングt38等)(図10参照)であるか否かが判断される。BFポートへの移送タイミングでなければ、プレ集磁部40からBFポート51a〜51dのいずれかへのキュベット100の移送は実施されない。
【0091】
BFポートへの移送タイミングである場合には、ステップS12に進み、移送アーム30(アーム回転モータ34およびアーム昇降モータ35)が駆動され、プレ集磁部40のキュベット設置部41からキュベット100がキャッチャ31によって取り出されるとともに、BFポート51a、51b、51c、51dの順で空いているBFポートに移送される。この際、図5に示すように、移送先のBFポート(51a〜51dのいずれか)がキャッチャ31の円弧軌跡C上に位置付けられるように水平移動モータ53が制御され、可動設置部50が移送アーム30と同期して移動する。
【0092】
ステップS13では、キュベット設置部41のキュベットセンサ43bによる検知結果に基づいて、プレ集磁部40(キュベット設置部41)が空いたか否か(キュベット100が正常に取り出されたか否か)が判断される。プレ集磁部40(キュベット設置部41)が空いていないと判断される場合には、ステップS14に進み、所定の異常(エラー)処理が行われた後、処理が終了する。
【0093】
プレ集磁部40(キュベット設置部41)が空いたと判断された場合には、ステップS15に進み、移送先のBFポート(51a〜51dのいずれか)のキュベットセンサ55b(図3参照)による検知結果に基づいて、移送先のBFポート(51a〜51dのいずれか)にキュベット100を移送することができたか否かが判断される。移送先のBFポート(51a〜51dのいずれか)に移送することができたと判断されれば、そのBFポート(51a〜51dのいずれか)へのキュベット100の移送処理が終了する。一方、移送先のBFポート(51a〜51dのいずれか)のキュベットセンサ55bによる検知が確認できない場合には、ステップS14に進み、所定の異常(エラー)処理が行われた後、処理が終了する。BFポートへの移送タイミングがくるたびにこのBFポートへの移送処理が実施されることにより、処理対象のキュベット100がプレ集磁部40から空いているBFポート(51a〜51dのいずれか)に順番に移送される。
【0094】
次に、図15に示すBFポート51a〜51dにおけるBF洗浄処理について説明する。上記の通り、BF洗浄処理は、3回の吸引・吐出処理(1)〜(3)と、吸引・吐出処理終了後の吸引処理(図11参照)とによって構成される。
【0095】
BF洗浄処理では、ステップS21において、吸引・吐出処理の実施回数を示す変数iが「1」にセット(初期化)される。そして、ステップS22において、処理動作の開始タイミング(タイミングt3、t4、t5、t6等)であるか否かが判断される。処理動作の開始タイミングでなければ、次の動作開始タイミングまでこのステップS22の判断が繰り返される。
【0096】
処理動作の開始タイミングがくると、ステップS23に進み、変数iが「4」か否かが判断される。変数iが「4」でない場合には、ステップS24に進んで吸引・吐出処理が実施される。吸引・吐出処理では、図11に示したように、各処理が所定のタイミングで実施されるように、可動設置部50、ノズル部60、撹拌部70等の各部が制御される。
【0097】
吸引・吐出処理が終了すると、ステップS25において、吸引・吐出処理の実施回数を示す変数iに「1」が加算される。そして、ステップS22に進み、次の動作開始タイミングまで待機する。このステップS22〜S25が3回繰り返される(吸引・吐出処理が3回実施される)と変数iが「4」になるため、ステップS23からステップS26に進む。
【0098】
ステップS26では、吸引処理が行われる。吸引処理では、図12に示したように、各処理が所定のタイミングで実施されるように、可動設置部50、ノズル部60、撹拌部70等の各部が制御される。このステップS26の吸引処理の完了によって、BFポート51a〜51dにおけるBF洗浄処理が完了する。BFポート51a〜51dにおけるBF洗浄処理は、各BFポート51a〜51d毎に判断されるため、図10に示したように各BFポート51a〜51dにおける処理の段階(何回目の吸引・吐出処理か)はBFポートによって異なる。
【0099】
次に、図16に示すBFポート51a〜51dから反応部9へのキュベット100の移送処理について説明する。
【0100】
反応部9への移送処理では、ステップS31において、反応部9へのキュベット100の移送タイミング(タイミングt7等)(図10参照)であるか否かが判断される。反応部9への移送タイミングでなければ、BFポート51a〜51dから反応部9へのキュベット100の移送は実施されない。
【0101】
反応部9へのキュベット100の移送タイミングである場合には、ステップS32において、可動設置部50が駆動されて移送対象のキュベット100がセットされたBFポート51a〜51dをキャッチャ31の円弧軌跡C(図5参照)上に位置付けるとともに、移送アーム30(アーム回転モータ34およびアーム昇降モータ35)が駆動されてBFポート51a〜51dの移送対象のキュベット100がキャッチャ31によって取り出される。そして、円弧軌跡C上の所定の返却位置240(図2参照)で反応部9のキュベット保持部9aにキュベット100がセットされる。
【0102】
ステップS33では、移送対象のキュベット100を保持していたBFポート51a〜51dのキュベットセンサ55bによる検知結果に基づいて、BFポート51a〜51dが空いたか否か(キュベットが正常に取り出されたか否か)が判断される。
【0103】
BFポート51a〜51dが空いた場合には、BFポート51a〜51dから反応部9へのキュベット100の移送処理が終了する。一方、移送対象のキュベット100を保持していたBFポート51a〜51dのキュベットセンサ55bによる検知(キュベット100の検知が無くなったこと)が確認できない場合には、BFポート51a〜51dが空いていない判断され、ステップS34に進み、所定の異常(エラー)処理が行われた後、処理が終了する。反応部9への移送タイミングがくるたびにこの反応部9への移送処理が実施されることにより、BF洗浄処理の完了したキュベット100から順番に、BFポート51a〜51dから反応部9へ移送される。
【0104】
本実施形態では、上記のように、複数のBFポート51a〜51dと、複数のBFポート51a〜51dにそれぞれ対応して設けられた複数のノズル61a〜61dを有するノズル部60とを設け、BF分離処理を各々のBFポート51a〜51dと各BFポート51a〜51dに対応するノズル61a〜61dとで並行して行うように構成することによって、BF分離処理を複数のキュベット100に対して並行して行うことができるので、免疫分析装置1の検体処理能力を向上させることができる。さらに、各々のBFポート51a〜51dに配置された各々のキュベット100に対するBF分離処理を、各々のBFポート51a〜51dにそれぞれ対応した各々のノズル61a〜61dにより個別に完了するように構成することによって、1つのキュベット100に対するBF分離処理を、キュベット100が配置されたBFポート51a〜51dに対応するノズル61a〜61dによってそれぞれ完了させることができるため、複数のノズル61a〜61dのうち特定のノズルのみが他のノズルよりも高度に汚染されるという事態を回避することができる。このため、複数のノズル61a〜61dを用いて複数のキュベット100に対するBF分離処理を並行して行うように構成した場合にも、特定のノズル61a〜61dの洗浄にのみ長時間を要することがないとともに、次検体へのキャリーオーバの発生を抑制することができる。これらにより、本実施形態による免疫分析装置1では、キャリーオーバの発生を抑制しながら、免疫分析装置1の検体処理能力を向上させることができる。
【0105】
また、本実施形態では、上記のように、CPU2aは、各々のBFポート51a〜51dに配置された各々のキュベット100内への洗浄液の吐出および液体吸引を対応する各ノズル61a〜61dにより複数回行うことでBF分離処理を完了するようにノズル部60を制御する。このように構成すれば、各々のBFポート51a〜51dにおいて、対応するノズル61a〜61dによってキュベット100内への洗浄液の吐出およびキュベット100内の液体の吸引を複数回繰り返すため、キュベット100内の未反応物質の濃度を低下させていく過程でノズル61a〜61dに付着している汚れを併せて低減させることができる。この結果、各々のBFポート51a〜51dにおいて、BF分離処理が完了した時点でノズル61a〜61dに付着している汚れが低減された状態となっているため、ノズル61a〜61dの洗浄に要する時間を減少させることができる。
【0106】
また、本実施形態では、上記のように、複数のノズル61a〜61dの上下移動に共用される1つのノズル昇降モータ63が設けられている。このように構成すれば、複数のノズル61a〜61dを共通の駆動部(ノズル昇降モータ63)で上下移動させることができるため、装置構成を簡略化させることができる。
【0107】
また、本実施形態では、上記のように、CPU2aは、BFポート51a〜51dに配置されたキュベット100に対するBF分離処理の途中において、BFポート51a〜51dに対応したノズル61a〜61dが上方に移動されてキュベット100から抜き出されたときに、キュベット100が配置されていないBFポート51a〜51dへ他のキュベット100を移送するように移送アーム30を制御する。このように構成すれば、同期して上下移動する複数のノズル61a〜61dが上方に移動されてキュベット100から抜き出されたときに、キュベット100が配置されていないBFポート(51a〜51dのいずれか)へキュベット100を移送すればよいので、ノズル昇降モータ63の制御を簡略化させつつ、複数のキュベット100をBF分離処理の途中で順次BFポート51a〜51dに移送することができる。
【0108】
また、本実施形態では、上記のように、複数の撹拌キャッチャ71a〜71dの上下移動に共用される1つの撹拌部昇降モータ73が設けられている。このように構成すれば、複数の撹拌キャッチャ71a〜71dを共通の駆動部(撹拌部昇降モータ73)で上下移動させることができるため、装置構成を簡略化させることができる。
【0109】
また、本実施形態では、上記のように、CPU2aは、プレ集磁部40にキュベット100が配置された後に、キュベット100を1次BF分離部11のいずれかのBFポート51a〜51dに移送するように移送アーム30を制御し、移送先のBFポート(51a〜51dのいずれか)に配置されたキュベット100内の液体の吸引を開始するようにノズル部60を制御する。このように構成すれば、各BFポート51a〜51dにキュベット100が移送される前に、プレ集磁部40で予めキュベット100内の磁性粒子を捕集しておくことができるので、各BFポート51a〜51dにおいて磁性粒子を捕集するのに要する時間を短縮することができる。その結果、キュベット100内の液体の吸引動作をより早く開始することができる。
【0110】
また、本実施形態では、上記のように、複数のキュベット100が同一の搬送経路(反応部9および移送アーム30による搬送経路)を経由した後、移送アーム30によりキュベット100がいずれかのBFポート51a〜51dに搬送されるように構成されている。このように構成すれば、複数のBFポート51a〜51dに容器を移送する移送アーム30までのキュベット100の搬送経路を共通化することができるので、複数のBFポート51a〜51dの各々において並行してBF分離処理を行う構成においても、免疫分析装置1の装置構成および動作制御を簡略化させることができる。
【0111】
また、本実施形態では、上記のように、CPU2aは、移送アーム30に保持されたキュベット100の回転移動の軌道上に、1次BF分離部11のBFポート51a〜51dが位置するように、水平移動モータ53を制御する。このように構成すれば、回転軸36周りに移送アーム30を回転させる簡素な構成でも、移送アーム30の円弧軌道C上にBFポート51a〜51dを移動させることによって複数のBFポート51a〜51dの各々にキュベット100を移送することができる。
【0112】
また、本実施形態では、上記のように、CPU2aは、反応部9の取出位置230にあるキュベット100を移送アーム30により取り出し、取り出したキュベット100を1次BF分離部11のBFポート51a〜51dに移送アーム30により移送し、1次BF分離部11のBFポート51a〜51dから移送アーム30によりキュベット100を取り出して反応部9の返却位置240に移送するように、アーム回転モータ34を制御可能に構成されている。このように構成すれば、共通の移送アーム30によって、反応部9からBFポート51a〜51dのいずれかへのキュベット100の移送と、BFポート51a〜51dから反応部9へのキュベット100の移送とを行うことができるので、装置構成をさらに簡略化させることができる。
【0113】
また、本実施形態では、上記のように、CPU2aは、取出位置230から複数のキュベット100を1つの移送アーム30により順次取り出し、取り出したキュベット100を1次BF分離部11のそれぞれのBFポート51a〜51dに順次移送するとともに、BF分離処理の完了したキュベット100から順に1つの移送アーム30により返却位置240に移送するようにアーム回転モータ34を制御し、BF分離処理を、各BFポート51a〜51dと各BFポート51a〜51dに対応するノズル61a〜61dとで部分的に並行して実行させる。このように構成すれば、1つの移送アーム30によって、それぞれのBFポート51a〜51dにキュベット100を順次移送するとともに、BF分離処理の完了したキュベット100を順次反応部9に返却することができるので、装置構成を簡略化させることができる。この場合にも、キュベット100が配置されたBFポート51a〜51dからBF分離処理を開始して、各BFポート51a〜51dで部分的に処理を並行して行うことができるので、免疫分析装置1の検体処理能力の向上を図ることができる。
【0114】
なお、今回開示された実施形態は、すべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は、上記した実施形態の説明ではなく特許請求の範囲によって示され、さらに特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれる。
【0115】
たとえば、上記実施形態では、本発明の分析装置を免疫分析装置1に適用した例を示したが、本発明はこれに限られない。磁性粒子を含む試薬を用いて分析する分析装置であれば本発明は適用可能であり、免疫分析装置以外の分析装置にも適用可能である。例えば、BF分離処理を利用して特定のDNAを抽出する装置に本発明を適用してもよい。
【0116】
また、上記実施形態では、1つのプレ集磁部を設けた例を示したが、本発明はこれに限られない。本発明では、複数のプレ集磁部を設けてもよい。
【0117】
また、上記実施形態では、プレ集磁部を1次BF分離部(2次BF分離部)に設けた例を示したが、本発明はこれに限られない。本発明は、プレ集磁部を1次(2次)BF分離部とは別個に設けて、プレ集磁部で予め集磁処理が行われたキュベットを1次(2次)BF分離部に移送する構成であってもよい。
【0118】
また、上記実施形態では、4つのBFポートを設けた例を示したが、本発明はこれに限られない。本発明では、2つ〜3つ、または、5つ以上のBFポートを設けてもよい。
【0119】
また、上記実施形態では、1次(2次)BF分離部に設けた1つの移送アームにより各BFポートにキュベットを移送するように構成した例を示したが、本発明はこれに限られない。本発明では、移送アームを複数設けてもよい。また、移送アームを1次(2次)BF分離部とは別個に設けてもよい。たとえば、1次BF分離部と2次BF分離部とに共通の移送アームを1次(2次)BF分離部とは別個に設けてもよい。
【0120】
また、上記実施形態では、キュベット設置部にセットされたキュベットを移送アームのキャッチャにより取り出して、各BFポートに移送するように構成した例を示したが、本発明はこれに限られない。たとえば、コンベヤなどの容器移送部によってキュベット設置部から各BFポートにキュベットを移送するように構成してもよい。
【0121】
また、上記実施形態では、4つのBFポートと、4つのノズルと、4つの撹拌キャッチャとを、それぞれ、1つの水平移動モータと、1つのノズル昇降モータと、1つの撹拌部昇降モータとによって移動させるように構成した例を示したが、本発明はこれに限られない。本発明では、各BFポート、ノズルおよび撹拌キャッチャにそれぞれ個別に駆動部を設けて、互いに独立して移動させるようにしてもよい。また、たとえば、BFポートのみ個別に移動するようにしてもよい。
【0122】
また、上記実施形態では、BF分離処理に関わる各部の動作制御を測定機構部2のCPU2aにより行うように構成した例を示したが、本発明はこれに限られない。たとえば、制御装置4のCPU4aがBF分離処理に関わる各部の動作制御を行うように構成してもよいし、制御装置4のCPU4aと測定機構部2のCPU2aとの両方が共同で動作制御を行うように構成してもよい。
【0123】
また、上記実施形態では、各BFポートにおけるBF洗浄処理を、対応するノズルが洗浄液の吐出と液体吸引とを複数回行うことによって完了させるように構成した例を示したが、本発明はこれに限られない。本発明では、対応するノズルが洗浄液の吐出と液体吸引とを1回だけ行うように構成してもよい。
【0124】
同様に、上記実施形態では、各BFポートにおけるBF洗浄処理を、3回の吸引・吐出処理と1回の吸引処理とによって構成した例を示したが、本発明はこれに限られない。たとえば、吸引・吐出処理が1回または2回でもよいし、4回以上でもよい。吸引処理を複数回行ってもよいし、吸引処理が無くてもよい。BF洗浄処理の内容は、装置(1次(2次)BF分離部)の性能に応じて設定すればよい。
【0125】
また、上記実施形態では、4つのBFポートのいずれかにキュベットが搬送される前のプレ集磁部までのキュベットの搬送経路が同一となるように構成した例を示したが、本発明はこれに限られない。本発明では、たとえばプレ集磁部を複数設けて、反応部における搬送経路のみが同一となるようにしてもよい。また、搬送経路を共通化せずに、キュベットを異なる搬送経路で各BFポートに搬送するように構成してもよい。
【符号の説明】
【0126】
1 免疫分析装置
2a CPU
9 反応部
11 1次BF分離部
12 2次BF分離部
12a、30 移送アーム
34 アーム回転モータ
40 プレ集磁部
51a、51b、51c、51d BFポート
53 水平移動モータ
60 ノズル部
61a、61b、61c、61d ノズル
63 ノズル昇降モータ
70 撹拌部
71a、71b、71c、71d 撹拌キャッチャ
73 撹拌部昇降モータ
100 キュベット
230 取出位置
240 返却位置
【特許請求の範囲】
【請求項1】
検体に含まれる目的物質を、磁性粒子を含む試薬を用いて分析する分析装置であって、
磁性粒子を含む液体試料を収容した容器がそれぞれ配置され、配置された容器内の磁性粒子を磁気的に捕集する複数の第1磁気捕集部と、前記複数の第1磁気捕集部にそれぞれ対応する複数のノズルとを備え、当該複数のノズルにより、前記複数の第1磁気捕集部に配置された複数の容器内への洗浄液の吐出および容器内の液体の吸引を行う目的物質分離部と、
容器を前記複数の第1磁気捕集部のいずれかに移送する容器移送部と、
各々の第1磁気捕集部に配置された容器内への洗浄液の吐出および容器内の液体の吸引を、対応する各々のノズルにより並行して行いながら、各々の第1磁気捕集部に配置された容器に対する目的物質分離処理を、対応した各々のノズルにより個別に完了するように、前記目的物質分離部を制御する制御部とを備える、分析装置。
【請求項2】
前記制御部は、各々の第1磁気捕集部に配置された容器内への洗浄液の吐出および容器内の液体の吸引を対応する各々のノズルにより複数回行うことで、各々の第1磁気捕集部に配置された容器に対する目的物質分離処理を完了するように前記目的物質分離部を制御可能に構成されている、請求項1に記載の分析装置。
【請求項3】
前記目的物質分離部は、前記複数のノズルの上下移動に共用される第1共用駆動部を備える、請求項2に記載の分析装置。
【請求項4】
前記目的物質分離部は、前記第1共用駆動部により前記複数のノズルを同期して上下移動させるように構成され、
前記制御部は、一の第1磁気捕集部に配置された一の容器内の目的物質分離処理の途中において、前記一の第1磁気捕集部に対応した一のノズルが上方に移動されて前記一の容器から抜き出されたときに、容器が配置されていない他の第1磁気捕集部へ他の容器を移送するように前記容器移送部を制御可能に構成されている、請求項3に記載の分析装置。
【請求項5】
前記目的物質分離部は、前記複数の第1磁気捕集部にそれぞれ対応する複数の把持部と、前記複数の第1磁気捕集部に配置された複数の容器に対する前記複数の把持部の移動に共用される第2共用駆動部とを備え、前記複数の把持部により前記複数の容器を把持して当該複数の容器内の液体試料を撹拌するように構成されている、請求項1〜4のいずれか1項に記載の分析装置。
【請求項6】
磁性粒子を含む液体試料を収容した容器が配置され、前記目的物質分離部の前記複数の第1磁気捕集部とは別個に設けられるとともに、前記容器内の磁性粒子を磁気的に捕集する第2磁気捕集部をさらに備え、
前記制御部は、前記第2磁気捕集部に容器が配置された後に、前記容器を前記目的物質分離部のいずれかの第1磁気捕集部に移送するように前記容器移送部を制御可能に構成されている、請求項1〜5のいずれか1項に記載の分析装置。
【請求項7】
前記分析装置に供給された複数の容器を同一の搬送経路を経由した後、前記容器移送部により前記目的物質分離部のいずれかの第1磁気捕集部に搬送するように構成されている、請求項1〜6のいずれか1項に記載の分析装置。
【請求項8】
前記目的物質分離部は、前記複数の第1磁気捕集部を水平方向に移動させる水平駆動部を含み、
前記容器移送部は、容器を保持するアームと、所定の回転軸を中心として前記アームを水平方向に回転させる回転駆動部とを含み、
前記制御部は、前記アームに保持された前記容器の回転移動の軌道上に、前記目的物質分離部の第1磁気捕集部が位置するように、前記水平駆動部を制御可能に構成されている、請求項7に記載の分析装置。
【請求項9】
磁性粒子を含む試薬と検体とが収容された容器を保持する反応部をさらに備え、
前記制御部は、前記反応部の第1の所定位置にある容器を前記アームにより取り出し、取り出した前記容器を前記目的物質分離部の第1磁気捕集部に前記アームにより移送し、前記目的物質分離部の第1磁気捕集部から前記アームにより前記容器を取り出して前記反応部の第2の所定位置に移送するように、前記回転駆動部を制御可能に構成されている、請求項8に記載の分析装置。
【請求項10】
前記容器移送部は、1つの前記アームを含み、
前記制御部は、前記第1の所定位置から複数の容器を前記1つのアームにより順次取り出し、取り出した容器を前記目的物質分離部のそれぞれの第1磁気捕集部に順次移送するとともに、目的物質分離処理が完了した容器から順に前記1つのアームにより前記第2の所定位置に移送するように前記回転駆動部を制御することが可能に構成されている、請求項9に記載の分析装置。
【請求項1】
検体に含まれる目的物質を、磁性粒子を含む試薬を用いて分析する分析装置であって、
磁性粒子を含む液体試料を収容した容器がそれぞれ配置され、配置された容器内の磁性粒子を磁気的に捕集する複数の第1磁気捕集部と、前記複数の第1磁気捕集部にそれぞれ対応する複数のノズルとを備え、当該複数のノズルにより、前記複数の第1磁気捕集部に配置された複数の容器内への洗浄液の吐出および容器内の液体の吸引を行う目的物質分離部と、
容器を前記複数の第1磁気捕集部のいずれかに移送する容器移送部と、
各々の第1磁気捕集部に配置された容器内への洗浄液の吐出および容器内の液体の吸引を、対応する各々のノズルにより並行して行いながら、各々の第1磁気捕集部に配置された容器に対する目的物質分離処理を、対応した各々のノズルにより個別に完了するように、前記目的物質分離部を制御する制御部とを備える、分析装置。
【請求項2】
前記制御部は、各々の第1磁気捕集部に配置された容器内への洗浄液の吐出および容器内の液体の吸引を対応する各々のノズルにより複数回行うことで、各々の第1磁気捕集部に配置された容器に対する目的物質分離処理を完了するように前記目的物質分離部を制御可能に構成されている、請求項1に記載の分析装置。
【請求項3】
前記目的物質分離部は、前記複数のノズルの上下移動に共用される第1共用駆動部を備える、請求項2に記載の分析装置。
【請求項4】
前記目的物質分離部は、前記第1共用駆動部により前記複数のノズルを同期して上下移動させるように構成され、
前記制御部は、一の第1磁気捕集部に配置された一の容器内の目的物質分離処理の途中において、前記一の第1磁気捕集部に対応した一のノズルが上方に移動されて前記一の容器から抜き出されたときに、容器が配置されていない他の第1磁気捕集部へ他の容器を移送するように前記容器移送部を制御可能に構成されている、請求項3に記載の分析装置。
【請求項5】
前記目的物質分離部は、前記複数の第1磁気捕集部にそれぞれ対応する複数の把持部と、前記複数の第1磁気捕集部に配置された複数の容器に対する前記複数の把持部の移動に共用される第2共用駆動部とを備え、前記複数の把持部により前記複数の容器を把持して当該複数の容器内の液体試料を撹拌するように構成されている、請求項1〜4のいずれか1項に記載の分析装置。
【請求項6】
磁性粒子を含む液体試料を収容した容器が配置され、前記目的物質分離部の前記複数の第1磁気捕集部とは別個に設けられるとともに、前記容器内の磁性粒子を磁気的に捕集する第2磁気捕集部をさらに備え、
前記制御部は、前記第2磁気捕集部に容器が配置された後に、前記容器を前記目的物質分離部のいずれかの第1磁気捕集部に移送するように前記容器移送部を制御可能に構成されている、請求項1〜5のいずれか1項に記載の分析装置。
【請求項7】
前記分析装置に供給された複数の容器を同一の搬送経路を経由した後、前記容器移送部により前記目的物質分離部のいずれかの第1磁気捕集部に搬送するように構成されている、請求項1〜6のいずれか1項に記載の分析装置。
【請求項8】
前記目的物質分離部は、前記複数の第1磁気捕集部を水平方向に移動させる水平駆動部を含み、
前記容器移送部は、容器を保持するアームと、所定の回転軸を中心として前記アームを水平方向に回転させる回転駆動部とを含み、
前記制御部は、前記アームに保持された前記容器の回転移動の軌道上に、前記目的物質分離部の第1磁気捕集部が位置するように、前記水平駆動部を制御可能に構成されている、請求項7に記載の分析装置。
【請求項9】
磁性粒子を含む試薬と検体とが収容された容器を保持する反応部をさらに備え、
前記制御部は、前記反応部の第1の所定位置にある容器を前記アームにより取り出し、取り出した前記容器を前記目的物質分離部の第1磁気捕集部に前記アームにより移送し、前記目的物質分離部の第1磁気捕集部から前記アームにより前記容器を取り出して前記反応部の第2の所定位置に移送するように、前記回転駆動部を制御可能に構成されている、請求項8に記載の分析装置。
【請求項10】
前記容器移送部は、1つの前記アームを含み、
前記制御部は、前記第1の所定位置から複数の容器を前記1つのアームにより順次取り出し、取り出した容器を前記目的物質分離部のそれぞれの第1磁気捕集部に順次移送するとともに、目的物質分離処理が完了した容器から順に前記1つのアームにより前記第2の所定位置に移送するように前記回転駆動部を制御することが可能に構成されている、請求項9に記載の分析装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2012−127757(P2012−127757A)
【公開日】平成24年7月5日(2012.7.5)
【国際特許分類】
【出願番号】特願2010−278440(P2010−278440)
【出願日】平成22年12月14日(2010.12.14)
【出願人】(390014960)シスメックス株式会社 (810)
【Fターム(参考)】
【公開日】平成24年7月5日(2012.7.5)
【国際特許分類】
【出願日】平成22年12月14日(2010.12.14)
【出願人】(390014960)シスメックス株式会社 (810)
【Fターム(参考)】
[ Back to top ]