
分析装置
【課題】無駄に使用される試薬の量を減らすとともに、送液に要する時間を短縮して分析のスループットを上げる。
【解決手段】マイクロシリンジによってサンプリングノズルにフローセルの容積とほぼ同量の必要最小限の試薬を吸引し、その後、サンプリングノズルをフローセルの注入ポートに挿入し、マイクロシリンジを駆動してフローセル内に試薬を注入する。サンプリングノズルの洗浄は、洗浄槽に移動したサンプリングノズルから洗浄水を吐出させることでノズル内側を洗浄し、洗浄槽内壁から洗浄水を噴出させてノズル外側を洗浄する。
【解決手段】マイクロシリンジによってサンプリングノズルにフローセルの容積とほぼ同量の必要最小限の試薬を吸引し、その後、サンプリングノズルをフローセルの注入ポートに挿入し、マイクロシリンジを駆動してフローセル内に試薬を注入する。サンプリングノズルの洗浄は、洗浄槽に移動したサンプリングノズルから洗浄水を吐出させることでノズル内側を洗浄し、洗浄槽内壁から洗浄水を噴出させてノズル外側を洗浄する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、試料が固定されたフローセルに試薬を注入し、フローセル内で生じる反応を検出して試料の分析を行う分析装置に関する。
【背景技術】
【0002】
DNAやRNAの塩基配列決定には、これまで主に電気泳動を利用した方法が用いられてきた。この方法においては、予め配列決定用のDNA断片又はRNA試料から逆転写反応を行い合成したcDNA断片試料を調製し、周知のサンガー法によるジデオキシ反応を実行した後、電気泳動を行い、分子量分離展開パターンを計測して解析する。これに対して、近年、基板に試料となるDNA断片を数多く固定して、パラレルに数多くの断片の配列情報を決定する次世代DNAシーケンサといわれる方法が提案されている。
【0003】
この次世代DNAシーケンサでは、例えば、反応場としてのフローセルの中に試料となるDNA断片を固定した多数のビーズを配置する。そして、フローセルへ試薬を供給し、塩基の伸張反応に伴って発生する蛍光信号を検出して、試料の塩基配列を解析する。これら次世代DNAシーケンサの多くは、試薬の供給にチューブとバルブを用いた送液システムを用いている。すなわち、それぞれの試薬の供給路を構成するチューブとフローセルに接続されたチューブとの間にバルブを配置し、バルブを切り替えることによって所望の試薬をフローセルに供給する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特表2008−528040号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
チューブを通して送られてくる試薬を、切り替えバルブで切り替えてフローセルに注入する送液システムには、次のような問題がある。
【0006】
1.送液に時間を要する。
チューブの長さが長くなると、送液にかかる時間も長くなる。
2.チューブ内で試薬の混合(コンタミネーション)が発生する。
複数の試薬が同じ流路を通るため、チューブ内を十分に洗浄しないとコンタミネーションが発生する。チューブ内を洗浄する洗浄液の液量もチューブ長さに比例して増える。
また、2種類の試薬を連続して送液する場合、試薬の流速分布は栓流(plug)ではなく楕円流(parabolic)であるため、流路が長いほど試薬は混合されていく。2種類の試薬の間に空気を挟んで混合されにくい状態で送液しても、チューブが長いと試薬の拡散が避けられず、混合が生じる。
3.余分な量の試薬を必要とし、分注精度が悪い。
チューブ内で試薬の混合が生じ、混合の生じていない試薬のみをフローセルへ注入して反応させるためには、フローセルの容量以上の試薬を送液する必要がある。
4.ユーザーがチューブを交換する場合があるため、装置メンテナンスが必要である。
5.洗浄が困難な切り替えバルブ内でコンタミネーションが発生する。
次世代DNAシーケンサは、方式により異なるが、高価な試薬を使用する必要があり、反応に用いられない無駄な試薬の量を減らすことが求められている。読み取り塩基長を長くするためには試薬の混合を極力避ける必要がある。また、送液に要する時間を短縮して分析のスループットを上げることが求められている。
【0007】
本発明は、これらの要請に応えることのできる分析装置を提供するものである。
【課題を解決するための手段】
【0008】
本発明による分析装置は、複数の試薬容器を保持する試薬ラックを設置する試薬ラック設置部と、内部流路と当該内部流路に接続した注入ポート及び排出ポートを備えるフローセルを設置するフローセル設置部と、サンプリングノズルと、サンプリングノズルが液面に接触したことを検知する液面検知部と、洗浄槽と、サンプリングノズルを試薬容器、洗浄槽及びフローセルの注入ポートの間に駆動するノズル駆動機構と、フローセル内の試料に生じた変化を検出する検出部と、送液システムと、装置各部を制御する制御部とを有する。
【0009】
送液システムは、洗浄液を収容した洗浄液タンクと、サンプリングノズルに接続されサンプリングノズルの先端から液体の吸引・吐出を行うためのマイクロシリンジと、洗浄液タンクからマイクロシリンジに洗浄液を送出するための第1機構と、洗浄液タンクから洗浄槽に洗浄液を送出するための第2機構とを有する。
【0010】
制御部は、液面検知部によって試薬容器中の試薬表面を検知してからサンプリングノズルを試薬中に所定距離だけ侵入させた状態でマイクロシリンジを制御することにより、サンプリングノズルに充填された洗浄液の先に試薬容器から所要量の試薬を吸引し、サンプリングノズルをフローセルの注入ポートに挿入した状態でマイクロシリンジを制御することにより、吸引した試薬を注入ポートからフローセルに注入し、また、サンプリングノズルを洗浄槽に位置決めした状態で第1機構及び/又は第2機構を作動させることによりサンプリングノズルの内側及び/又は外側の洗浄を行う。
【0011】
上記第1機構及び第2機構は、種々の手段により実現することができる。例えば、上記第1機構及び第2機構は、それぞれ開閉自在で一方が開状態のとき他方が閉状態となるように制御される一対の弁が上流側と下流側に配置されたシリンジによって構成することができる。あるいは、洗浄液タンクから洗浄液がポンプによって吸い上げられて再び洗浄液タンクに戻される洗浄液循環流路が形成されている場合には、上記第1機構を、その洗浄液循環流路及び洗浄液循環流路とマイクロシリンジを接続する流路中に設けられた弁によって構成することができる。このとき、上記第2機構は、その洗浄液循環流路及び洗浄液循環流路と洗浄槽を接続する流路中に設けられた弁によって構成することができる。
【0012】
試薬容器からサンプリングノズルに吸引する試薬の量は、フローセルの容積以上、かつフローセルの容積に10μLを加えた量以下で十分であり、使用する試薬の量を極力減らすことができる。
【0013】
試薬ラックの上面などサンプリングノズルがアクセス可能な位置に、サンプリングノズルが接触したことを液面検知部で検出できる部材を複数備えることができる。これらの部材は、ノズル駆動機構によるサンプリングノズルの駆動校正用の部材として利用される。
【0014】
ノズル駆動機構は、一例として、ガイドレールと、ガイドレールに沿って直線移動する移動ユニットと、サンプリングノズルが固定され移動ユニットに設定された回転軸の回りに回動するアームとを有するものとすることができる。また、サンプリングノズルの駆動校正用部材は、ガイドレールに沿った方向に既知の間隔で少なくとも2個が配置され、ガイドレールに垂直な方向に既知の間隔で少なくとも2個が配置されているのが好ましい。
【0015】
制御部は、液面検知部を用いて校正用部材の位置を検知することでサンプリングノズル位置のキャリブレーションを行う機能を有する。キャリブレーション機能の実行時、制御部は、サンプリングノズルをガイドレールに沿った方向に配置された少なくとも2個の部材の位置を検知し、そのときのノズル駆動機構への駆動信号と当該2つの部材間の間隔を元に直線移動方向への移動距離と駆動信号との比である直線移動係数を求める。また、ガイドレールに垂直な方向の距離が異なる少なくとも2個の部材に対してそれぞれ2方向から位置を検知し、そのときのノズル駆動機構への駆動信号と先の求めた直線移動係数とを元に、回転軸を中心としたサンプリングノズル先端の回転半径、及び回転角度と駆動信号との比である回転移動係数とを求める。更に、ガイドレールに対して垂直な方向に既知の間隔で配置された2つの部材を検知し、そのときのノズル駆動機構への駆動信号、先に求めた直線移動係数及び回転移動係数を元に当該部材を検知しているときのアームの回転角度を求める。こうしても求められたパラメータを用いることにより、サンプリングノズルを所望の位置に正確に位置決めすることができる。
【0016】
本発明による分析方法は、先端まで洗浄液が満たされたサンプリングノズルを試薬が入った試薬容器の上方に移動させる工程、サンプリングノズルを降下させる工程、液面検知手段によって試薬容器中の試薬表面を検知してから所定距離だけ試薬中に侵入させてサンプリングノズルの降下を停止させる工程、サンプリングノズルに所要量の試薬を吸引する工程、サンプリングノズルを洗浄槽に移動させる工程、洗浄槽内でサンプリングノズル表面に洗浄液を噴霧し、サンプリングノズルの外側に付着した試薬を洗浄除去する工程、サンプリングノズルをフローセルの注入ポートの上方に移動する工程、サンプリングノズルを降下させ、先端を注入ポートに挿入する工程、サンプリングノズルに吸引した試薬をフローセルに圧入する工程、圧入動作終了後、予め決められた時間の間、サンプリングノズルを注入ポートに挿入した状態を維持する工程、その後、サンプリングノズルを注入ポートから離脱させて上昇させる工程、サンプリングノズルを洗浄槽に移動させる工程、洗浄槽内でサンプリングノズルから洗浄液を吐出してサンプリングノズルの内側を洗浄すると共に、サンプリングノズルの外側に洗浄液を噴霧して洗浄する工程、サンプリングノズルをフローセルの注入ポートの上方に移動する工程、サンプリングノズルを降下させ、先端を注入ポートに挿入する工程、サンプリングノズルから洗浄液をフローセルに注入し、未反応の試薬を洗い流す工程、フローセルを撮像し、試薬注入による変化を検出する検出工程、を有する。未反応の試薬をフローセルから洗い流す工程で使用する洗浄液には一種の試薬を用いるが、それに代えてサンプリングノズルを洗浄する洗浄液、例えば純水、を用いることもできる。洗浄液として試薬を用いる場合には、その洗浄液(試薬)も試薬ラック上に置いて、他の試薬と同様の方法でフローセルに注入できる。
【0017】
また、未反応の試薬を洗い流す工程の前に、サンプリングノズルをフローセルの注入ポートに挿入し、フローセル内の試薬を吸引する工程、サンプリングノズルを回収試薬用容器の上方に移動させる工程、吸引した試薬を回収試薬用容器に吐出する工程、を実行することで、フローセルから試薬を回収して再利用することができる。
【発明の効果】
【0018】
本発明によると、使用する試薬の量を最小限にすると共に、送液に要する時間を短縮して分析のスループットを上げることが可能になる。
【0019】
上記した以外の、課題、構成及び効果は、以下の実施形態の説明により明らかにされる。
【図面の簡単な説明】
【0020】
【図1】本発明による分析装置の一例を示す概略図。
【図2】送液システムの一例を示す概略図。
【図3】フローセルの一例を示す概略図。
【図4】フローセルの注入ポートの説明図。
【図5】洗浄槽におけるサンプリングプノズル洗浄の様子を示す概略断面図。
【図6】サンプリングノズルの洗浄時の制御手順の例を示すフローチャート。
【図7】フローセル内部洗浄時の制御手順の例を示すフローチャート。
【図8】試薬容器から試薬を吸引する手順の例を示すフローチャート。
【図9】フローセルへの試薬注入の手順の例を示すフローチャート。
【図10】サンプリングノズルの注入ポートへの挿入・離脱、及びマイクロシリンジのプランジャの駆動のタイミングと、フローセル内の圧力変化の関係を示す模式図。
【図11】検出の手順を示すフローチャート。
【図12】2種類の試薬を混合後、フローセルに注入する手順を示すフローチャート。
【図13】試薬回収の手順を示すフローチャート。
【図14】試薬ラックの他の実施例を示す断面摸式図。
【図15】送液システムの他の例を示す概略図。
【図16】サンプリングノズル移動のキャリブレーション方法を説明する図。
【発明を実施するための形態】
【0021】
以下、図面を参照して本発明の実施の形態を説明する。本発明は、フローセルに試薬を注入して結果を観察することにより試料の分析を行う方式の分析装置一般に適用可能であるが、ここでは、本発明をDNAシーケンサに適用した場合の例について説明する。
【0022】
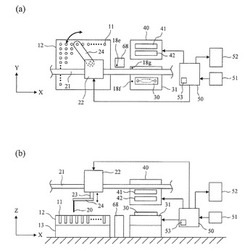
図1は、本発明による分析装置(DNAシーケンサ)の一例を示す概略図であり、図1(a)は平面摸式図、図1(b)はその正面摸式図である。図のようにXYZ軸を設定して説明する。
【0023】
本実施例の分析装置は、複数の試薬容器11を保持する試薬ラック12を載置する試薬ラック台13、1個又は複数個のフローセル30を保持して移動可能なフローセルステージ31、先端から液体を吸引・吐出することのできるサンプリングノズル20、サンプリングノズル20を所望の3次元位置に駆動するノズル駆動機構、サンプリングノズル20を洗浄する洗浄槽68、試薬注入によってフローセル30内の試料に生じた変化を検出するための検出ユニット40を備える。サンプリングノズル20による試薬の吸引・吐出、洗浄などは、図示しない送液システムによって実行される。送液システムについては、図2を用いて詳述する。
【0024】
分析装置の各部は制御・演算部50の制御下にあり、制御・演算部50は、入力部51を介して制御・演算部50に設定されたプログラムに従って分析装置を制御して連続運転する。制御・演算部50のメモリには、分析の手順、試薬ラック12に配置されている複数の試薬容器11や洗浄槽68の座標位置、各試薬容器に入っている試薬の種類、フローセル30に試薬や洗浄液を注入する注入ポートの座標位置、検出ユニット40による検出結果の処理手順等の情報が格納されている。制御・演算部50は、メモリに格納された情報を参照しながら、分析プログラムに従って装置各部を制御し、分析を実行する。
【0025】
サンプリングノズル20は、一例として、先端部が外径1mm、内径0.5mm、長さ150mm程度の金属材料、例えばSUSでできた中空ノズルであり、後述する送液システムに接続されて、先端部に試薬ラック12に配置された所望の試薬容器11から所要量の試薬を吸引し、フローセル30等に吐出することができる。また、サンプリングノズル20は、液面検知に適した材質と構造を有する。液面検知は、例えば、金属製のサンプリングノズル20の先端が液面などの導電性領域に接触したときの静電容量変化から液面検知を行う既知の方式を用いて制御・演算部50に設けられた液面検知部53で実行される。液面検知部53から出力される液面検知信号は、その後の装置制御に利用される。図4に示すように、サンプリングノズル20の先端部は金属が露出しているが、液面検知の誤作動を避けるため、サンプリングノズル20の上部は撥水性の樹脂層25で被覆されている。
【0026】
ノズル駆動機構は、ガイドレール21、ガイドレール21に沿ってX軸方向に直線移動する直線移動ユニット22、直線移動ユニット22に設けられた回転軸23の回りに回動可能なアーム24を有する。アーム24の回転軸23と反対側の部分にサンプリングノズル20が固定されている。直線移動ユニット22は、例えば、ガイドレール21に設けられたラックと噛み合うピニオンを有し、ピニオンをステッピングモータによって回転駆動することによって、X軸方向の所望位置に移動することができる。また、回転軸23は、同様にステッピングモータによってXY平面内に回転すると共に、Z軸方向に上下動してサンプリングノズル20の先端を所望のZ軸方向位置に位置付けることができる。サンプリングノズル20は、ノズル駆動機構によるX軸方向の直線移動、回転軸23の回りの回転移動、Z軸方向の上下移動を組み合わせることにより、試薬ラック12に配置された任意の位置の試薬容器11、洗浄槽68、後述するフローセルの注入ポートにアクセスすることができる。
【0027】
検出ユニット40は、フローセルを照射する光源41、及び励起光照射によってフローセル30から発生された蛍光を色分解して検出することのできるCCD等の撮像装置42を備える。フローセル30は、フローセルステージ31によってXY軸方向に移動可能である。フローセル30は、サンプリングノズル20を介した試薬注入や洗浄等の操作を受ける際には、図示するように検出ユニット40の下方から外れた場所に位置し、検出ユニット40を用いた検出を行う際には、フローセルステージ31によって検出ユニット40の下方位置に移動される。
【0028】
入力部51から入力された入力情報、検出ユニット40による撮像画像などの分析過程の情報、現在の装置状態や装置パラメータなどの情報、分析の全工程中での終了済み工程に関する情報、分析結果などの情報は表示部52に表示される。
【0029】
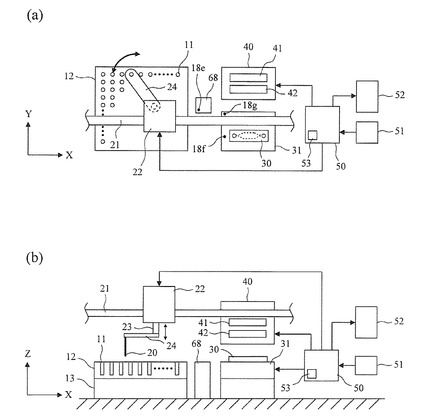
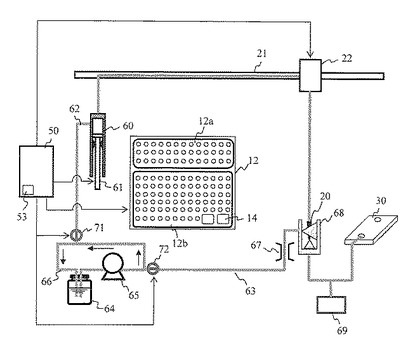
図2は、本実施例の分析装置に組み込まれている送液システムの一例を示す概略図である。サンプリングノズル20の先端からの試薬の吸引・吐出、及びサンプリングノズル20の洗浄が、この送液システムによって行われる。
【0030】
本実施例の送液システムは、サンプリングノズル20の先端から試薬を秤量して吸引・吐出するためのマイクロシリンジ60と、洗浄液をサンプリングノズル20及び洗浄槽68にそれぞれ供給する第1流路62及び第2流路63を有する。本実施例では、洗浄液タンク64に貯留された洗浄液は、連続運転されているポンプ65によって吸い上げられ、洗浄液循環流路66を通して再び洗浄液タンク64に戻される。すなわち、洗浄液はポンプ65によって洗浄液循環流路66を矢印方向に常時循環されている。第1電磁弁71を介して一端が洗浄液循環流路66と接続された第1流路62は、他端が、マイクロシリンジ60を介してサンプリングノズル20の内部に連通している。同様に第2電磁弁72を介して一端が洗浄液循環流路66と接続された第2流路63は、他端が、洗浄槽68の側壁に開口している。洗浄液としては、例えば純水が使用される。
【0031】
ノズル駆動機構によってサンプリングノズル20の先端部を洗浄槽68内に移動させ、その状態で、第1電磁弁71のみを開状態にすると、ポンプ65から圧送された洗浄液がサンプリングノズル20を通して洗浄槽68内に噴出され、それによってサンプリングノズル20の内側を洗浄することができる。洗浄中、マイクロシリンジ60のプランジャ61は動かしても、動かさなくても良い。また、第2電磁弁72のみを開状態にすると、洗浄槽68の内壁から洗浄液が噴出し、それによってサンプリングノズル20の外側を洗浄することができる。更に、第1電磁弁71及び第2電磁弁72を同時に開状態にすると、洗浄槽68内でサンプリングノズル20の内側と外側を同時に洗浄することができる。第1電磁弁71及び第2電磁弁72の開閉制御は、制御・演算部50によって行われる。
【0032】
第1流路62を介してサンプリングノズル20へ供給する洗浄液と第2流路63を介して洗浄槽68へ供給する洗浄液の割合は、第2流路63の洗浄槽68に近い箇所に設けられた流量調節絞り67により設定される。サンプリングノズル20を洗浄した洗浄液は廃液タンク69に貯留される。図示しない廃液排出ポンプを用いて、洗浄槽68に貯留された洗浄液を廃液タンク69に貯留することができる。洗浄槽68を封止して第2電磁弁72を開放して、廃液排出ポンプで引くことで、洗浄液タンク64から洗浄液を送液することもできる。また洗浄液タンク64を空にして同様の操作を行い、更に第1電磁弁71を開放することで、第1流路62、第2流路63、洗浄液循環流路66の液体を除くこともできる。またポンプ65、第2電磁弁72、配管が正しく接続されていない場合には、洗浄槽68から洗浄液が出ないため、サンプリングノズル20を洗浄できない。この場合、ノズルの液面検知機能が働かないため、故障を検知することができる。また、洗浄動作を行うことで洗浄液タンク64内の洗浄液は消費される。洗浄液タンク64には液面センサが設置され、洗浄液タンク64内の洗浄液が少なくなったときは、別途設置した図示しない洗浄液補充タンクから洗浄液タンク64に洗浄液が補充される。
【0033】
このように、本実施例の送液システムによると、ポンプによって短時間に多量の洗浄液をサンプリングノズルの内側や外側、あるいは内側と外側の両方に供給することができ、使用後にサンプリングノズルに付着している試薬を短時間で十分に洗浄することができる。従って、試薬のコンタミネーションを回避して分析精度を向上することができる。また、洗浄時間を短縮して分析のスループットを向上することができる。
【0034】
試薬ラック12には温度センサとペルチェ素子等の温度調節ユニットが設けられ、試薬容器11に保持された試薬を一定温度に維持している。例えば、試薬ラックの第1領域12aに保持されている試薬群は室温に維持され、第2領域12bに保持されている試薬群は4℃に維持されている。試薬ラック12の温度制御も、制御・演算部50から行うことができる。また、試薬の種類によっては、使用直前に複数の試薬を混合してからフローセルに供給することが望ましいものがある。そのため、試薬ラック12には、混合試薬の調製に使用するための予混合容器14が設けられている。混合試薬の使用に当たっては、別々の試薬容器11からサンプリングノズル20によって吸引したそれぞれの試薬を一旦、予混合容器14内に吐出し、予混合容器14内で混合して調製された混合試薬を再びサンプリングノズル20で吸引してフローセル30に供給する。
【0035】
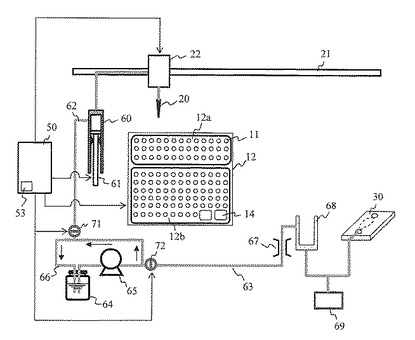
図3は、フローセルの一例を示す概略図である。図3(a)はフローセルの斜視図、図3(b)は図3(a)のX−X’断面図である。
【0036】
この例のフローセルは、注入ポート32と排出ポート33、及び液が流れる流路34を有する。DNAシーケンサ用フローセルは、核酸試料を表面に有するビーズ等の担体あるいは遊離の核酸試料が流路内に含まれるように設計されており、核酸試料を表面に有するビーズ等の担体あるいは遊離の核酸試料が結合するサンプル固定層35を備える上部基板36と、下部基板37とを有する。上部基板36と下部基板37との間に流路34が形成される。流路34は、核酸分析のための反応に必要な試薬が供給される流路として機能するとともに、反応が起こる反応チャンバとしても機能する。また、流路34のための空間を確保するために、上部基板36と下部基板37の間にはスペーサ38が配置されている。すなわち、図3に示したフローセルは、上部基板36と、流路に相当する部分がくり貫かれたスペーサ38と、下部基板37とが貼り合わされた構造を有する。反応溶液は、注入ポート32より注入されて、排出ポート33より排出される。一例として、スペーサの厚さは50〜100μm、スペーサをくり貫いて形成された流路の幅は20〜30mm、流路の長さは75〜100mmとすることができるが、これらの数値に限定されるものではない。
【0037】
検出ユニット40に対向する側の上部基板36は、励起光及び蛍光を透過することのできるガラス、石英、サファイア、あるいはアクリル樹脂やシクロオレフィンポリマー等の樹脂からなる。サンプル固定層35は無機酸化物で形成されている。固定層を形成する無機酸化物はチタニア、ジルコニア、アルミナ、ゼオライト、五酸化バナジウム、シリカ、サファイア、酸化タングステン及び五酸化タンタルからなる群から選択され、これらの少なくとも2種類の混合物であってもよい。この中でも、チタニア、ジルコニア、アルミナ、ゼオライト、五酸化バナジウム、又はこれらの混合物が望ましい。これらの無機酸化物は核酸試料分子内のリン酸部位、又はリン酸エステル部位と結合することで、核酸試料をサンプル固定層へ結合することができる。特に、チタニア、ジルコニア、アルミナ、ゼオライト、五酸化バナジウムは、DNAが結合し得る求電子性の大きいルイス酸サイトやブロンステッド酸サイトが多く含まれる。
【0038】
注入ポート32より核酸試料を表面に有するビーズ等の担体又は遊離の核酸試料を含む水溶液を注入した後、一定時間保持してサンプル固定層35上に核酸試料を固定する。この際、核酸試料を表面に有する担体又は遊離の核酸試料がサンプル固定層35上にほぼ均一に固定される。その後、カルボン酸化合物、リン酸化合物、硫酸化合物、ニトリル化合物、それらの塩、及びそれらの化合物の少なくとも2種類の混合物からなる群から選ばれる化合物の水溶液を同様に注入してブロッキング層を形成する。これらの化合物は、無機酸化物に特異的に結合するものであり、核酸試料とサンプル固定層結合部位以外の領域を、被覆率の高い状態でブロッキングすることができる。ブロッキング層により、核酸試料とサンプル固定層結合部への反応溶液の浸透を防ぐことで、サンプル固定層からの核酸試料のはがれを防止することができる。
【0039】
図3には、流路が3つ形成されたフローセルの例を示すが、流路の数は3つに限定されない。流路の数が多い場合、一度に多数の反応を行うことができ、高スループットの分析が可能である。核酸試料が内部の流路に固定されたフローセルを、分析装置のフローセルステージにセットし核酸分析を行う。分析中、フローセルは、フローセルステージが備える温度制御ユニットによって所定の温度に制御される。
【0040】
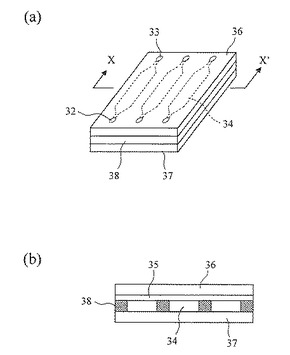
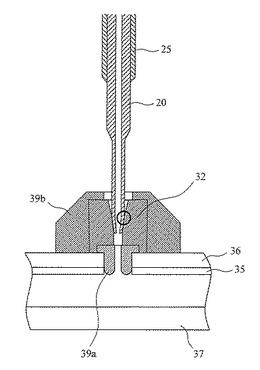
図4は、フローセルの注入ポートに挿入されたサンプリングノズルの様子を示す断面模式図である。
【0041】
フローセルの注入ポート32はpeek樹脂製で、上部が内径3mm程度、下部がサンプリングノズル20先端の外径と同じ内径1mm程度となったテーパ状(すり鉢状)の開口部を有する。注入ポート32は、Oリング39aを介してフローセルの上部基板36に液密に接続され、側面と上面の肩部を覆う固定部材39bによってフローセルに固定されている。サンプリングノズル20は、上方から下降して注入ポート32に挿入され、わずかな先細りのテーパを有するノズル先端が、図に○印で示すように、注入ポート32のテーパ部分に接触することによってシールがなされる。
【0042】
次に、分析装置の試薬ラック台13に試薬ラック12を設置し、フローセルステージ31にフローセル30を設置した状態から、試薬をフローセルに供給して分析を行う手順について説明する。
【0043】
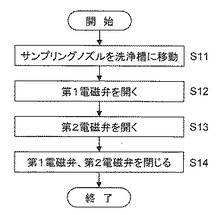
(1)サンプリングノズル洗浄
まず、サンプリングノズル20の洗浄を行う。このときの制御・演算部50による制御の手順を図6に示す。
【0044】
制御・演算部50は、最初にノズル駆動機構を制御して、サンプリングノズル20を洗浄槽68に移動する(S11)。次に、制御・演算部50は、ポンプ65によって洗浄液が循環している洗浄液循環流路66に接続されている第1電磁弁71を制御して開状態にする(S12)。マイクロシリンジ60のプランジャ61は、洗浄中であれば動かしても動かさなくてもよい。この状態では、ポンプ65から圧送された洗浄液が、第1電磁弁71、第1流路62を通ってマイクロシリンジ60に入り、そのままサンプリングノズル20を通ってノズル先端から洗浄槽68内に噴出される。この状態で、ノズル内側の洗浄が行われる。洗浄液としては純水を使用した。
【0045】
次に、制御・演算部50は、洗浄液循環流路66に接続している第2電磁弁72を制御して開状態にする(S13)。すると、ポンプ65から圧送された洗浄液が、第2電磁弁72、第2流路63を通って洗浄槽68の内壁から洗浄槽内に噴出し、洗浄槽68内に位置しているサンプリングノズル20の外側が洗浄される。こうして、図5に示すように、サンプリングノズル20の内側と外側の洗浄が行われる。洗浄が終了したら、制御・演算部50は、第1電磁弁71及び第2電磁弁72を閉じる(S14)。
【0046】
なお、最初に第1電磁弁71を開いて、次に第2電磁弁72を開く代わりに、第1電磁弁71と第2電磁弁72を同時に開いてもよい。この場合には、サンプリングノズルの内側と外側の洗浄が同時に行われることになる。また、洗浄の順序を、最初にノズルの外側とし、次にノズルの内側としてもよい。
【0047】
いずれの場合でも、サンプリングノズル内側の洗浄が終了し、第1電磁弁71を閉じた時点で、洗浄液循環流路66に接続されている第1流路62から、マイクロシリンジ60、及びサンプリングノズル20の先端までが、洗浄液で満たされた状態になる。
【0048】
本実施例の洗浄方法は、短時間に多量の洗浄液をサンプリングノズルの内側や外側、あるいは内側と外側の両方に供給することができ、洗浄時間を短縮して分析のスループットを向上することができる。
【0049】
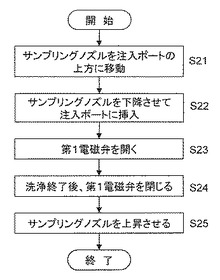
(2)フローセル洗浄
次に、フローセル30の内部を洗浄する。図5は、洗浄槽におけるサンプリングプノズル洗浄の様子を示す概略断面図である。このときの制御・演算部50による制御の手順を図7のフローチャートに示す。
【0050】
制御・演算部50は、ノズル駆動機構を制御して、サンプリングノズル20をフローセル30の注入ポート32の上方位置に移動させる(S21)。次に、サンプリングノズルを下降させ、図4に示したように、ノズル先端を注入ポートに挿入させる(S22)。
【0051】
このとき、フローセルの注入ポートの位置とサンプリングノズルの先端位置に1〜2mm程度の誤差があっても、ノズル先端が注入ポートのテーパに倣って挿入され、完全なシールがなされるように、サンプリングノズル20の後端が固定されているアーム24の剛性が設定されている。サンプリングノズルは、金属製ではあるが、細いため、大きな剛性を持たせることができない。従って、通常の自動分析装置のようにアーム24の剛性を大きく設定すると、フローセルの注入ポートに対してサンプリングノズル先端の位置決め誤差が生じた場合、その誤差はサンプリングノズルが曲がることによって吸収することになる。すると、回転軸23に対するサンプリングノズル20の先端位置の関係が当初の設定から狂い、ノズル先端を正確に位置決めすることができなって、所望の試薬の吸引やフローセルへの試薬注入ができなくなるという問題が生じる。従って、注入ポートに対するサンプリングノズル先端の位置決め誤差があった場合、サンプリングノズルの曲がりだけでその誤差を吸収するのではなく、極力、アーム24側の柔軟性でも吸収できるように、アーム24の剛性を低めに設定してある。このようにアームは、サンプリングノズルがフローセルのテーパ状の注入ポートへ挿入されるとき、アーム自体も撓むように剛性を小さくすることで、サンプリングノズルと共にアームも撓んで、ノズル駆動機構によるサンプリングノズルの位置決め誤差を吸収するように作製されている。
【0052】
次に、制御・演算部は、第1電磁弁71を開く(S23)。このとき、マイクロシリンジ60のプランジャ61は固定しておいてもよいし、動かしてもよい。すると、ポンプ65から圧送された洗浄液が、第1電磁弁71、第1流路62を通ってマイクロシリンジ60に入り、更にサンプリングノズル20の先端から注入ポート32を通ってフローセル30の流路34に流れ込み、フローセルの洗浄が行われる。フローセルの流路を洗浄した洗浄液は、廃液タンク69に溜められる。予め設定された時間の間、第1電磁弁71を開いてフローセルの洗浄が終了したら、制御・演算部50は、第1電磁弁71を閉じる(S24)。その後、制御・演算部50は、ノズル駆動機構を制御してサンプリングノズル20を上昇させ、注入ポート32から離す(S25)。このとき、制御・演算部50は、第1電磁弁71を閉じて直ちにノズル駆動機構にサンプリングノズルの上昇を指令するのではなく、フローセル内における洗浄液の圧力が安定するまでの時間として予め定められた時間だけ待ってからサンプリングノズルの上昇を指令する。これについては、フローセルへの試薬注入の個所で更に詳述する。
【0053】
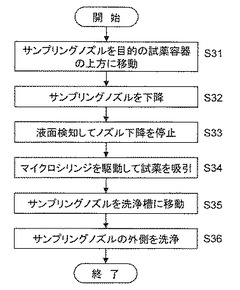
(3)試薬容器からの試薬吸引
図8のフローチャートを参照して、試薬ラック12中の所定位置の試薬容器11からサンプリングノズル20によって試薬を吸引する手順について説明する。
【0054】
制御・演算部50は、予めプログラムされている手順に従って、吸引すべき試薬の種類及び吸引量を決定し、次に、メモリに格納されている試薬容器の位置と試薬の種類との対応関係の情報を参照してサンプリングノズルの移動位置を決定する。次に、制御・演算部50は、ノズル駆動機構を制御して、サンプリングノズル20を目的の試薬が入っている試薬容器の上方位置に移動させる(S31)。続いて、サンプリングノズルを下降させてノズル先端を試薬容器内に挿入していく(S32)。このとき、液面検知部53による液面検知機能を利用して試薬容器内の試薬液面を検知する。試薬液面を検知したら、そこから更に一定距離だけサンプリングノズルを下降させ、ノズル先端が所定深さだけ試薬溶液内に挿入した状態で、サンプリングノズルを停止させる(S33)。次に、制御・演算部50は、マイクロシリンジ60のプランジャ61を吸引側に所定量だけ駆動し、サンプリングノズル20に充填されている洗浄液の先に、決められた量の試薬を吸引して保持する(S34)。
【0055】
次に、制御・演算部50は、ノズル駆動機構を制御してサンプリングノズルを上方に駆動してノズル先端を試薬容器から出し、更にサンプリングノズルを洗浄槽68に移動させる(S35)。その後、制御・演算部50は、第2電磁弁72を開く。すると、洗浄槽68の内壁面から洗浄液が噴出し、サンプリングノズル20の外側に付着した試薬を洗い流す(S36)。サンプリングノズルに吸引した試薬は、洗浄されずにそのままノズル内に保持される。サンプリングノズル外側の洗浄が終わると、制御・演算部50は、第2電磁弁72を閉じ、ノズル駆動機構を制御してサンプリングノズル20を上方に移動させる。
【0056】
液面検知機能を利用してサンプリングノズル20の先端は試薬中に必要最小限の深さだけ挿入されているため、サンプリングノズル20の外側に付着し、洗浄槽68で洗い流される試薬の量を常に最小限度に抑制することができる。また、試薬の液面検知を行うことの別の利点として、試薬容器の形状と液面高さの情報から試薬残量を知ることができる。これにより解析できる残り塩基数を計算したり、ユーザーに試薬交換の時期を知らせたりすることが可能になる。
【0057】
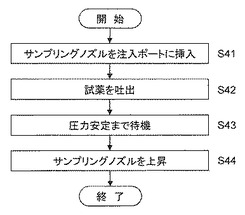
(4)フローセルへの試薬注入
図9のフローチャートを参照して、サンプリングノズル20の先端に吸引・保持している試薬をフローセル30に注入する手順について説明する。
【0058】
最初に、制御・演算部50は、ノズル駆動機構を制御してサンプリングノズル20をフローセル30の注入ポート32の上方位置に移動させる。次に、サンプリングノズル20を下降させ、図4に示したように、ノズル先端を注入ポート32に挿入させる(S41)。注入ポート32に対するサンプリングノズル20の先端の位置決め誤差があった場合、サンプリングノズル20の後端部が固定されているアーム24の柔軟性によってその誤差が吸収され、サンプリングノズルにダメージを与えることなく、注入ポート32のテーパに倣ってノズル先端が注入ポート32に挿入される。続いて、制御・演算部50は、マイクロシリンジ60のプランジャ61を吐出方向に駆動し、サンプリングノズル20に充填されている洗浄液の先に吸引した試薬を、注入ポート32を通してフローセル30に注入する(S42)。制御・演算部50は、プランジャ61の駆動が完了した後、フローセル30内の圧力が安定するまで待って(S43)、ノズル駆動機構を制御してサンプリングノズルを上方に引き上げる(S44)。
【0059】
図10は、注入ポートへのサンプリングノズルの挿入・離脱、及びマイクロシリンジのプランジャの駆動のタイミングと、フローセル内の圧力変化の関係を示す模式図である。横軸は時間である。図10は、サンプリングノズル20が時刻t0にフローセルの注入ポート32に挿入され、時刻t4に注入ポート32から上方に引き上げられることを示している。また、マイクロシリンジ60のプランジャ61は時刻t1〜t2に亘って、試薬吐出のために駆動されている。
【0060】
試薬は、マイクロシリンジ60のプランジャ61を駆動してコンダクタンスの小さなフローセルの流路に加圧注入されている。そのため、プランジャ61の駆動停止直後(時刻t2)にはフローセル30内の圧力が高く、サンプリングノズル20をすぐに注入ポート32から引き離すと、試薬が逆流して注入ポート32からあふれ出すことがある。本実施例では、試薬注入動作終了時刻t2から、フローセル30内の圧力が安定するまでの時間待った後、サンプリングノズル20を注入ポート32から離して上方に引き上げる。すなわち、サンプリングノズル20を注入ポート32から引き上げる時刻t4を、t4>t3に設定する。フローセル内の圧力が安定するまでの待ち時間(t3−t2)は、注入する試薬の粘性、注入速度、フローセルの流路抵抗などに依存して決まるが、典型的には0.5秒から1秒程度待てばよい。
【0061】
フローセルへの試薬注入後、制御・演算部50は、ノズル駆動機構を制御してサンプリングノズル20を洗浄槽68に移動する。そして、「(1)サンプリングノズル洗浄」に示した手順にてサンプリングノズルの内側及び外側を洗浄し、次の動作に備える。
【0062】
なお、本実施例に示した試薬吸引及び試薬注入の手順に従うと、サンプリングプローブからフローセルに注入すべき試薬の量は、フローセルの容積に、フローセルの注入ポート32の個所で生じるデッドスペース分の容積を余分に付加した量で十分である。デッドスペースの容積は、5μL以下と見積もられる。従って、フローセル30に注入すべき試薬の量、すなわち試薬容器11からサンプリングノズル20に吸引すべき試薬の量は、少なくともフローセル20の容積分が必要ではあるが、フローセルの容積分にせいぜい5μLから10μL程度を付加した量で十分である。従って、本実施例によると、フローセルに注入するために試薬容器から吸引する試薬量が少なく、サンプリングノズル20の外側に付着して洗い流される試薬量が少ない。つまり、使用試薬の量が少なく、試薬の無駄も少ない。こうして、本実施例によると、高価な試薬を有効に活用することが可能になる。
【0063】
更に、本実施例ではサンプリングノズルで試薬吸引とフローセルへの送液を実現しており、チューブと切り替えバルブを用いた方式に比べて送液時間を短縮することが可能である。また、試薬キャリーオーバが非常に少なく、より純粋な試薬をフローセルに供給できるため、解読塩基数の限界をのばすことができる。
【0064】
(5)検出
次に、検出の手順について、図11のフローチャートを参照して説明する。
フローセル内に試薬を注入した後、フローセル30の温度を反応に適した温度に制御する(S51)。こうしてフローセルの流路内に固定された核酸試料と試薬を温度調整することで反応が起こる。反応終了後、制御・演算部50は、上記「(2)フローセル洗浄」に説明した処理、又は試薬ラック12に置かれた洗浄液(試薬)に対して「(3)試薬容器からの試薬吸引と(4)フローセルへの試薬注入」に説明した処理を実行し、セル内を洗浄して未反応の試薬を洗い流す(S52)。次に、制御・演算部50は、フローセルステージ31を駆動制御し、フローセル30を検出ユニット40の下方位置に移動させる(S53)。次に、制御・演算部50は、検出ユニット40から励起光を照射し、フローセル30内の核酸試料から発せられる蛍光を検出する(S54)。
【0065】
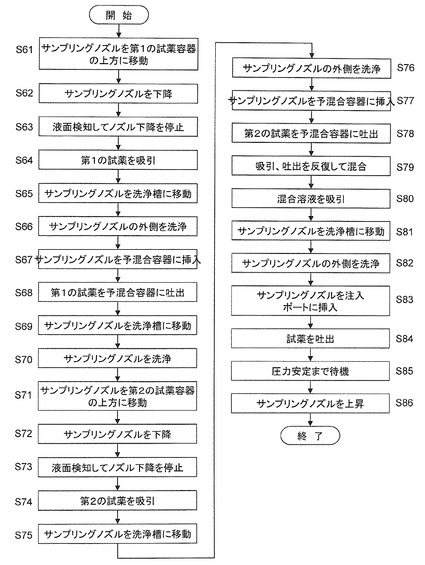
(6)予混合セルでの試薬混合
使用の直前に2種類の試薬(第1の試薬と第2の試薬)を混合してからフローセルに注入する手順について、図12のフローチャートを参照して説明する。
【0066】
最初に、制御・演算部50は、ノズル駆動機構を制御してサンプリングノズル20を第1の試薬が入っている試薬容器の上方に移動させる(S61)。次に、制御・演算部50は、サンプリングノズル20を下降させてノズル先端を第1の試薬の試薬容器内に挿入する(S62)。このとき、液面検知機能を利用して試薬液面を検知する。試薬液面を検知したら、そこから更に一定距離だけサンプリングノズル20を下降させ、ノズル先端が所定深さだけ試薬溶液内に挿入した状態で、サンプリングノズル29の下降を停止させる(63)。次に、制御・演算部50は、マイクロシリンジ60のプランジャ61を吸引側に所定量だけ駆動し、サンプリングノズル20に充填されている洗浄液の先に、第1の試薬を決められた量だけ吸引して保持する(S64)。
【0067】
次に、制御・演算部50は、ノズル駆動機構を制御してサンプリングノズル20を上方に駆動してノズル先端を第1の試薬の試薬容器から出し、更にサンプリングノズル20を洗浄槽68に移動させる(S65)。その後、制御・演算部50は、第2電磁弁72を開く。すると、洗浄槽の内壁面から洗浄液が噴出し、サンプリングノズルの外側に付着した第1の試薬が洗い流される(S66)。液面検知機能を利用してノズル先端を第1の試薬中に必要最小限の深さだけ挿入しているため、サンプリングノズルの外側に付着し、洗い流される第1の試薬の量は極微量である。サンプリングノズル外側の洗浄が終わると、制御・演算部50は、第2電磁弁72を閉じる。
【0068】
次に、制御・演算部50は、ノズル駆動機構を制御してサンプリングノズル20を予混合容器14の上方に移動させた後、下降させ、サンプリングノズルを予混合容器に挿入する(S67)。その後、制御・演算部50は、マイクロシリンジ60のプランジャ61を吐出方向に駆動し、サンプリングノズル20に充填されている洗浄液の先に吸引した第1の試薬を、予混合容器14中に吐出する(S68)。
【0069】
次に、制御・演算部50は、ノズル駆動機構を制御してサンプリングノズル20を洗浄槽68に移動する(S69)。そして、「(1)サンプリングノズル洗浄」に示した手順にてサンプリングノズル20の内側及び外側を洗浄する(S70)。
【0070】
次に、制御・演算部50は、ノズル駆動機構を制御してサンプリングノズル20を第2の試薬が入っている試薬容器上方に移動させる(S71)。次に、制御・演算部50は、サンプリングノズル20を下降させてノズル先端を第2の試薬の試薬容器内に挿入する(S72)。このとき、液面検知機能を利用して試薬液面を検知する。試薬液面を検知したら、そこから更に一定距離だけサンプリングノズル20を下降させ、ノズル先端が所定深さだけ試薬溶液内に挿入した状態で、サンプリングノズルの下降を停止させる(S73)。次に、制御・演算部50は、マイクロシリンジ60のプランジャ61を吸引側に所定量だけ駆動し、サンプリングノズル20に充填されている洗浄液の先に、第2の試薬を決められた量だけ吸引して保持する(S74)。
【0071】
次に、制御・演算部50は、ノズル駆動機構を制御してサンプリングノズル20を洗浄槽68に移動する(S75)。そして、制御・演算部50は、洗浄液循環流路66に接続している第2電磁弁72を制御して開状態にする。すると、ポンプ65から圧送された洗浄液が、第2電磁弁72、第2流路63を通って洗浄槽68の内壁から噴出し、洗浄槽68内に位置しているサンプリングプノズル20の外側が洗浄される(S76)。洗浄が終了したら、制御・演算部は、第2電磁弁を閉じる。
【0072】
次に、制御・演算部50は、ノズル駆動機構を制御してサンプリングノズル20を予混合容器14の上方に移動させた後、下降させ、サンプリングノズル20を予混合容器14に挿入する(S77)。その後、制御・演算部50は、マイクロシリンジ60のプランジャ61を吐出方向に駆動し、サンプリングノズル20に充填されている洗浄液の先に吸引した第2の試薬を、予混合容器13中に吐出する(S78)。
【0073】
次に、制御・演算部50は、サンプリングノズル20を予混合容器13の底部に衝突しないようにして第1の試薬と第2の試薬の混合液中に所定深さまで挿入させる。その後、制御・演算部50は、マイクロシリンジ60のプランジャ61を吸引側と吐出側に交互に数回駆動し、第1の試薬と第2の試薬の混合液のサンプリングノズルへの吸引、予混合容器14内への吐出を反復することで、第1の試薬と第2の試薬を十分に混合させる(S79)。このとき、プランジャ61を吐出側に過剰に駆動して、サンプリングノズル20から洗浄液が予混合容器14内に吐出されないようにする。
【0074】
予混合容器14内での第1の試薬と第2の試薬の混合が完了したら、制御・演算部50は、マイクロシリンジ60のプランジャ61を吸引側に駆動して、混合液をサンプリングノズル20の先端に吸引する(S80)。
【0075】
その後、制御・演算部50は、ノズル駆動機構を制御してサンプリングノズル20を洗浄槽68に移動させる(S81)。そして、制御・演算部50は、洗浄液循環流路66に接続している第2電磁弁72を制御して開状態にする。すると、ポンプ65から圧送された洗浄液が、第2電磁弁72、第2流路63を通って洗浄槽68の内壁から噴出し、洗浄槽68内に位置しているサンプリングプノズル20の外側が洗浄される(S82)。洗浄が終了したら、制御・演算部50は、第2電磁弁72を閉じる。
【0076】
次に、制御・演算部50は、上記「(4)フローセルへの試薬注入」に示した手順に従って、第1の試薬と第2の試薬の混合試薬をフローセル30に注入する(S83からS86)。
【0077】
フローセルへの混合試料注入後、上記「(1)サンプリングノズル洗浄」に示した手順にてサンプリングノズル20の内側及び外側を洗浄する(S70)。
【0078】
その後、必要があれば予混合容器14の洗浄を行う。予混合容器14の洗浄に当たって、制御・演算部50は、サンプリングノズル20を使用後の予混合容器14へ移動させ、第1電磁弁71を開いて十分な量の洗浄液を予混合容器14内に注入する。その後、制御・演算部50は、マイクロシリンジ60のプランジャ61を吸引側と吐出側に交互に数回駆動し、予混合容器14の内壁に付着した試薬を洗浄液によって洗い流す。予混合容器内壁の洗浄が終わったら、制御・演算部50は、マイクロシリンジ60のプランジャ61を吸引側に駆動して、予混合容器14内の洗浄液をサンプリングノズル20に吸引する。その後、制御・演算部50は、サンプリングノズル20を洗浄槽68に移動させ、第1電磁弁71と第2電磁弁を開いて、吸引した洗浄液を放出させるとともに、サンプリングノズル20の内側と外側を洗浄する。
【0079】
なお、ここでは2種類の試薬を混合する例について説明したが、3種類以上の試薬を混合して調製した混合試薬をフローセルに注入する場合の手順も、上記と同様の原理に基づいて行うことができる。また、複数種類の試薬を連続的に吸引してから、予混合容器14へ一括して吐出することもできる。
【0080】
また、洗浄液が満たされているサンプリングノズル先端への吸引、吐出という動作に基づく本実施例の送液システムを用いると、フローセルに注入して反応が終了した後の試薬を、注入ポートからサンプリングノズルで吸引して別の反応に再利用することが可能である。フローセルに注入された試薬のうち実際に反応に使われて消費されるのは全試薬量の1%に満たない。そのため、反応終了後にフローセルから回収した試薬は、十分に再利用可能な濃度及び純度を持っている。
【0081】
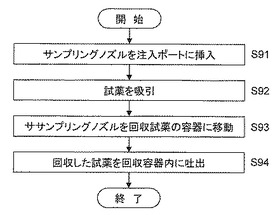
図13は、フローセルからの試薬回収の手順を示すフローチャートである。試薬の回収は、フローセル内での反応が終了した段階で、洗浄液によって試薬を洗い流すタイミングの前に実行する。
【0082】
制御・演算部50は、ノズル駆動機構を制御してサンプリングノズル20を反応が終了したフローセル30の注入ポート32に挿入する(S91)。次に、マイクロシリンジ60のプランジャ61を吸引側に駆動し、フローセル30内の試薬を吸引する(S92)。次に、制御・演算部50は、ノズル駆動機構を制御してサンプリングノズル20を試薬ラック12に用意されている回収試薬用の容器に移動させ(S93)、その容器内に吸引した試薬を吐出して回収する(S94)。当然ながら、回収試薬用の容器は、試薬の種別ごとに別々に用意する。試薬の回収が終わったら、制御・演算部50は、ノズル駆動機構を制御してサンプリングノズル20を洗浄槽68に移動し、サンプリングノズル20の内側及び外側の洗浄を行い、次の動作に備える。回収試薬用の容器に回収した試薬は、通常の試薬容器の試薬と同様に使用することができる。本実施例によると、更に効率的な試薬の利用が可能になり、分析コストの低減に寄与する。
【0083】
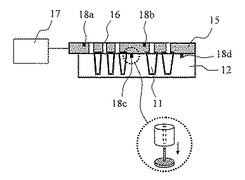
図14は、試薬ラックの他の実施例を示す断面摸式図である。本実施例の試薬ラックは、上面にスライド式に移動可動なカバー15を有する。上部が開放した容器に試薬を入れておくと、試薬が蒸発したり、酸化が進むなどの問題が生じることがある。そのため、試薬ラック12上に、試薬容器の位置に合わせてサンプリングノズルの先端部が通過することのできる複数の開口16が設けられているカバー15を配置した。カバー15は、制御・演算部50からの指令で駆動されるモータ17によって、一軸方向にスライド式に移動可能になっている。カバー15は、使用していない試薬容器に対しては開口の位置がずれて容器上部を覆い、使用する試薬容器に対しては開口の位置が一致してサンプリングノズルによるアクセスが可能なようにモータ17で位置決めされる。本実施例によると、試薬の蒸発や酸化の問題が軽減される。
【0084】
以上の実施例では、試薬は、サンプリングノズルに充填されている洗浄液の先端に、洗浄液と界面が接した状態で吸引されるものとして説明した。しかし、試薬吸引の前に空気を例えば5μL程度吸引して、洗浄液と試薬の間に空気層を形成することで、洗浄液に接触しないようにして試薬をサンプリングノズルの先端に吸引、保持することも可能である。この場合において、フローセルへの試薬吐出時にフローセル内に空気が導入されないようにするには、試薬を予め少し多めに吸引しておき、フローセルへの試薬注入の際に、サンプリングノズル内に試薬が少し残るようにして吐出すればよい。
【0085】
また、上記実施例の送液システムは、ポンプ65を備える洗浄液循環流路66を有し、洗浄液は洗浄液循環流路66から電磁弁71,72を介して第1流路62あるいは第2流路63に供給する構成をとったが、洗浄液循環流路は必ずしも必須ではない。
【0086】
図15は、洗浄液循環流路を持たない送液システムの例を示す概略図である。本実施例の送液システムは、破線内の要素が図2の実施例に示した送液システムとは異なる。本実施例の送液システムは、サンプリングノズル20に連通する第1流路62に配置された第1電磁弁71の上流側に、洗浄液送出用の第1洗浄液シリンジ81を有し、第1洗浄液シリンジ81と洗浄液タンク64の間に第3電磁弁83を備える。また、洗浄槽68の内壁に開口する第2流路63に配置された第2電磁弁72の上流側に、洗浄液送出用の第2洗浄液シリンジ84を有し、第2洗浄液シリンジ84と洗浄液タンク64の間に第4電磁弁86を備える。制御・演算部50は、第1電磁弁71、第2電磁弁72の制御に加えて、第3電磁弁83と第1洗浄液シリンジ81のプランジャ82、第4電磁弁86と第2洗浄液シリンジ84のプランジャ85の制御を行う。
【0087】
サンプリングノズル先端からの洗浄液吐出は、次の手順に従って実行される。制御・演算部50は、第1電磁弁71が閉じ、第3電磁弁83が開いた状態で、第1洗浄液シリンジ81のプランジャ82を吸引方向に駆動し、洗浄液タンク64から第1洗浄液シリンジ81に洗浄液を吸引する。洗浄液の吸引が終わったら、第3電磁弁を閉じる。ここまでの工程は、サンプリングノズルから洗浄液の吐出を行っていない空き時間に実行し、予め準備しておいてもよい。その後、洗浄液吐出が求められているタイミングで、制御・演算部50は、第1電磁弁71を開き、プランジャ82を吐出方向に駆動する。これにより、サンプリングノズル20の先端から洗浄液が吐出される。マイクロシリンジ60のプランジャ61は固定したままとする。なお、プランジャ82の駆動と同時にマイクロシリンジ60のプランジャ61も吐出方向に駆動すると、サンプリングノズルから吐出される洗浄液の流速を増大することができる。
【0088】
洗浄槽68の内壁から洗浄槽68内に洗浄液を噴出させるための手順は、以下のとおりである。制御・演算部50は、第2電磁弁72が閉じ、第4電磁弁86が開いた状態で、第2洗浄液シリンジ84のプランジャ85を吸引方向に駆動し、洗浄液タンク64から第2洗浄液シリンジ84に洗浄液を吸引する。洗浄液の吸引が終わったら、第4電磁弁を閉じる。ここまでの工程は、洗浄槽68内に洗浄液の噴出を行っていない空き時間に実行し、予め準備しておいてもよい。その後、洗浄槽68への洗浄液噴出が求められているタイミングで、制御・演算部50は、第2電磁弁72を開き、プランジャ85を吐出方向に駆動する。これにより、洗浄槽68の内壁から洗浄液が噴出される。
【0089】
マイクロシリンジ60を用いた試薬の吸引・吐出の動作については、図2に示した送液システムの場合と同じである。
【0090】
実際の装置では、サンプリングノズル20と注入ポート32との位置の誤差を±1mm以下、好ましくは±0.5mm以下にすることが必須となる。但し、例えサンプリングノズル20に触れない限り、初期設定値の誤差が変わらない構造を実現したとしても、実際にはサンプリングノズル20を交換した場合や誤って触れたり曲げたりした場合、回転軸23に対するサンプリングノズル20の先端の回転半径が変わることがある。例えば回転半径が100mmで、サンプリングノズル20が1mm外側へ曲がった場合、回転半径は101mm、内側へ曲がった場合、回転半径は99mmとなる。このような場合に備えてサンプリングノズル20の位置をキャリブレーションする必要がある。サンプリングノズルの曲がりが大きい場合、サンプリングノズル20を下降させたとき例えばカバー15へぶつかるが、ぶつかることでサンプリングノズル20が上側へ持ち上げられることを検知する図示しないジャミングセンサがあれば、位置ずれをキャリブレーションしないことによるサンプリングノズル20の破損を防ぐことはできる。但し、位置ずれが発生するたびに、サンプリングノズル20の位置を動かして、試薬容器11、洗浄槽68、注入ポート32の位置を目視で再度合わせるのは時間を要するだけでなく、合わせる人によって誤差が変わってしまうため、サンプリングノズル20が注入ポート32へ入ることを保証できなくなる。従って、自動でサンプリングノズル20のキャリブレーションを行う方法が必要となる。
【0091】
試薬ラック12、試薬ラック12上に設置するカバー15、洗浄槽68、フローセルステージ31、注入ポート32などに位置決めピン18を設置することにより、自動でサンプリングノズル20の位置を合わせる方法を以下に記載する。但し、位置決めピン18の位置や個数は、図示したものに限定されるものではない。位置決めピンはサンプリングノズル外径程度(例えば0.1〜1mmであるが、これらに限定されるものではない)の金属部分(導電性部分)を含んでおり、図14に破線で囲んで示したピン18cの拡大図のように、その周囲はプラスチックなどの非導電性物質で覆われている。あるいはその逆で、開口16のように位置決め部分が非導電性物質で液面検知せずに、それ以外の部分が導電性物質で液面検知できるようにすることもできる。但し、位置決めピン18の構造はこれに限定されるものではない。アーム24が下降してサンプリングノズル20の先端が位置決めピン18の導電性部分へ接触すると、液面検知機能が働く。これは液面検知機能が導電性部分に接触することで機能することを利用している。一方、アーム24が非導電性部分へ接触すると、液面検知機能が働かない。従って、アーム24の位置を少しずつ動かしながら液面検知が働く範囲を求めることで、位置決めピン18の中心を求めることができる。
【0092】
1箇所の位置決めピン18の位置を求めるだけでは、自動で精度良くキャリブレーションすることはできない。これは例えば装置が大きくなればなるほど、アーム24の移動量が大きくため、誤差が積み重なるためである。例えば、直線移動ユニット22が500mm移動することを考える。直線移動ユニット22は、例えば、図示しないモータが回転することで、それに付随する図示しない歯車が回転し、歯車に取り付けられた図示しないベルトが回転することで、ガイドレール21に沿って移動する構造とすることができる。歯車直径がφ10mmの場合、アーム24は例えば50回転で500mmの距離を移動するが、歯車直径には機械誤差が存在する。歯車直径が10.05mmと50μm大きかった場合、50回転で502.5mmと2.5mm余分に多く移動する。従って、位置決めピンを用いて複数の位置を求めて、機械公差を含む下記のパラメータを算出することで、サンプリングノズル20のキャリブレーションが可能となる。
【0093】
試薬ラック12で距離既知の長方形を構成するように4つの位置決めピン18を配置した図16の例を用いて、キャリブレーション方法を説明する。但し、位置決めピン18の位置と個数はこれに限定されるものではない。本キャリブレーションは、サンプリングノズル20から注入ポート32までの距離などが短い場合には発生しないため、新たな技術的課題である。
【0094】
いま、図16に示すように、試薬ラック12上に4個の位置決めピンA〜Dが設置されているものとする。各位置決めピンの位置は既知であり、位置決めピンA,B間及び位置決めピンC,D間は既知の距離dだけ離れており、位置決めピンA,C間及び位置決めピンB,D間は既知の距離Δyだけ離れている。位置決めピンA,Bを結ぶ直線、及び位置決めピンC,Dを結ぶ直線はガイドレール21に平行であるとする。アームの位置及び回転軸回りの姿勢は、ガイドレール21に沿ったX軸方向への移動と、回転軸の回りへの回転角度によって決まる。ここでは、アームのX軸方向への移動及び回転軸の回りへの回転は、いずれもステッピングモータをパルス駆動することにより行われるものとする。そして、サンプリングノズルを用いた液面検知機能によって、サンプリングノズルの先端を位置決めピンAの中心に位置づけた状態のアーム24Aを、X駆動ステッピングモータへの駆動パルス数XAとアームを回転させるステッピングモータへの駆動パルス数TAの組を用いて、(XA,TA)のように表示する。XA,TAはいずれも計測可能な量である。
【0095】
キャリブレーションは、次のステップ1〜5により実行される。
(1)ステップ1
図16の破線は、アーム24を移動してサンプリングノズル20によって各位置決めピンを検出したときのアーム24の姿勢を示している。また、アーム24の実線は回転角度が初期角度にあるときを示しており、ガイドレール21に対する角度がαであることを示す。β、γも同様にガイドレール21に対する角度を示す。サンプリングノズル20が位置決めピンAを検出しているアーム24Aの状態から位置決めピンBを検出するアーム24Bの状態にアームをX移動させたときのパルス数を距離で割ることで、アーム24が駆動信号である1パルスあたりに進むX方向の距離、すなわち直線移動係数Lを算出する。アーム24Aの状態は(XA,TA)、アーム24Bの状態は(XB,TB)で表され、TA=TBであるので、直線移動係数Lは次式により求めることができる。
【0096】
L=d/(XB−XA) …(1)
【0097】
位置決めピンC,Dに対して同様の測定を行い、平均値を算出して直線移動係数Lを求めてもよい。ガイドレール21と位置決めピンA,Bを結ぶ直線は平行であることが望ましいが、試薬ラック12がガイドレール21に対して平行ではない場合、位置決めピンAからBに位置合わせするときアームを回転させる必要がある。この場合、試薬容器11の各位置は試薬ラック12をθ回転(行列計算)させた位置にあるとして、サンプリングノズル20のキャリブレーションを行う。
【0098】
(2)ステップ2
位置決めピンBと位置決めピンDに対して、アームを24Bと24B’、及び24Dと24D’のように2方向から位置合わせすることで、駆動信号である1パルスあたりのアーム回転角度、すなわち回転移動係数Tと、アーム24の回転半径rを算出する。位置決めピンBとDの2点を2方向から位置決めすることで、2元連立方程式を導いて算出する。ここで、アーム24の回転半径rとは、正確には回転軸23に対するサンプリングノズル20の先端位置までの距離のことであるが、便宜上、アームの回転半径rという。
【0099】
例えば、位置決めピンBに対して2方向から位置決めした場合、回転半径rは変わらないため、破線で示した三角形は二等辺三角形を形成する。頂角は回転に要したアームのパルス数に相当する。二等辺三角形の底辺の長さは、直線移動ユニット22が1パルスあたりにX方向に進む距離である直線移動係数Lが既知のため、算出することができる。回転移動係数Tがわかると、アームの回転半径rも算出できる。
【0100】
位置決めピンBに対してアームを右側から位置決めしたアーム24Bの状態(XB,TB)と、左側から位置決めしたアーム24B’の状態(XB’,TB’)から次式(2)(3)が成り立つ。但し、θB’=θBとした。
【0101】
2θB=(TB’− TB)×T−π …(2)
L×(XB’− XB)=2rcosθB …(3)
【0102】
同様の操作を位置決めピンDに対して行う。すなわち、位置決めピンDに対してアームを右側から位置決めしたアーム24Dの状態(XD,TD)と、左側から位置決めしたアーム24D’の状態(XD’,TD’)から次式(4)(5)が得られる。
【0103】
2θD=(TD’− TD)×T−π …(4)
L×(XD’− XD)=2rcosθD …(5)
【0104】
式(2)のθBを(3)に代入することでTとrの関係式が得られ、同様に式(4)のθDを(5)に代入することで、別のTとrの関係式が得られる。これより、1パルスあたりのアーム回転角度である回転移動係数Tとアーム24の回転半径rを求めることができる。
【0105】
なお、ここでは2個の位置決めピンに対する位置決めによってTとrを求めたが、3個以上の位置決めピンに対して同様の操作を行い、Tとrについて複数の値の平均値を求め、それを回転移動係数及びアームの回転半径としてもよい。
【0106】
(3)ステップ3
位置決めピンA(角度β)から位置決めピンC(角度γ)へ位置決めするためにアームを回転させるのに要したパルス数と、既知の距離Δy及び上記で求めたアームの回転半径rを用いて、次式(6)の関係から角度βを算出する。
【0107】
rsinγ−rsinβ=Δy …(6)
式(6)において、角度γへは、角度βの状態からパルス数(TC−TA)分アームを回転させることで位置づけられる。すなわち、式(6)は未知数としてβだけを含む式に変形可能であり、それから角度βを求めることができる。角度βが分かれば、式(6)から角度γも求まる。角度の値が必要なのは、アームを同じパルス数回転させても、アームの初期位置(角度α)によってサンプリングノズルがY方向へ進む距離が異なるためで、キャリブレーションを行う際には求める必要がある。
【0108】
(4)ステップ4
アームの初期位置に対する試薬容器11、予混同容器14、開口カバー16、注入ポート32、洗浄槽68の位置を算出して、算出した上述のパラメータからサンプリングノズル20の位置決めを行う。
【0109】
(5)ステップ5
Z方向に関しては、試薬ラック12が金属製の場合、試薬容器を除いた試薬ラック底面へ液面検知を行うことで底面までの高さを把握できる。例えばその位置から試薬容器底面までの距離を引いた位置をZの降下位置としてキャリブレーションできる。試薬ラック12に対するガイドレール21の傾きを算出できる。
【0110】
ステップ1〜4に説明した位置決めの方法は、液面検知で位置決めピンの位置を特定する上記実施例の方法に限定されるものではない。ピンの位置を特定する別の方法(センサで検知するなど)があれば、同様の方法論で位置決め可能である。
【0111】
ノズルを交換した場合や曲げた場合は、アーム24の回転半径のみが変わるだけである。X,θの1パルスあたりの分解能は変わらないため、例えば位置決めピン18iを2方向から位置決めするだけでキャリブレーションを行うことができる。キャリブレーションのログを取ることで、算出したパラメータの誤差を検証することができる。
【0112】
なお、制御・演算部50は、算出したパラメータが想定したパラメータ範囲(機械公差、液面検知誤差などから推定可能)を外れたことを検知した場合、装置の異常状態と判定して装置の運転、具体的にはサンプリングノズルの駆動を中止し、異常を報知するように構成することも可能である。異常の報知は警報音、異常灯の点灯、あるいは表示部52への異常表示など適宜の手段で行うことができる。
【0113】
制御・演算部50が異常状態と判定するのは、次のような場合である。
(a)計算した試薬容器の位置(X,T)が、アームが動ける範囲のX,Tを超えていて実際にはアクセスできない。またはX,Tの解が無い場合。
(b)計算したアームの回転半径rがある値より小さい、あるいは大きい場合。この場合には、サンプリングノズルが曲がっていることが想定され、サンプリングノズルが試薬容器側面にぶつかることがある。
(c)液面検知で位置決めピンA,BのZから算出した試薬ラックに対するアーム(X方向)の傾きが大きい場合。この場合には、サンプリングノズルが試薬容器側面にぶつかることがある。
(d)液面検知で位置決めピンA,Cを2方向からアクセスした場合のZから算出した試薬ラックに対するノズル先端の回転面の傾きが大きい場合。この場合には、サンプリングノズルが試薬容器側面にぶつかることがある。
(e)液面検知で位置決めピンA,B,C,DのZから算出した試薬ラック面の傾きが大きい場合。この場合には、サンプリングノズルが試薬容器側面にぶつかることがある。
【0114】
また、装置の出荷時検査で上記(a)〜(e)の異常が発生しない場合でも、サンプリングノズルを交換した場合に上記(a)〜(e)の異常が発生する場合が想定される。これは、サンプリングノズルには曲げ角度などの公差があるために、サンプリングノズルを交換するたびにアームの回転半径rが変化するためである。従って、出荷時検査で上記(a)〜(e)の検査に加えて、サンプリングノズル回転半径rの最大値と最小値を代入した計算を行うことで、サンプリングノズル交換時に上記(a)〜(e)の異常が発生するリスクを回避できる。そのための対策としてサンプリングノズルを交換すること、アームや試薬ラックの据付位置や角度を再調整することが挙げられる。
【0115】
次に、一例として、分析すべき試料DNA断片を1分子ずつ捕捉し、1塩基ずつ伸長させて、取り込まれた蛍光標識を1分子ごと検出して塩基配列を決定する方法について説明する。具体的には、DNAポリメラーゼの基質として鋳型DNAに取り込まれてDNA鎖伸長反応を保護基の存在により停止することができかつ検出され得る標識を持つ4種のdNTPの誘導体を用いてDNAポリメラーゼ反応を行わせる工程、次いで取り込まれたdNTP誘導体を蛍光等で検出する工程、及びdNTP誘導体を伸長可能な状態に戻す工程を1サイクルとし、それを繰り返すことにより試料DNAの塩基配列を決定する。この時、フローセルへの試薬注入、洗浄等の各送液処理工程を、上記(1)〜(6)に説明した本実施例の工程を組み合わせることにより行う。
【0116】
試料DNA断片は、ビオチン化DNAをストレプトアビジン化ビーズに固定し、ビーズをフローセル内にばら撒くことで、フローセル内にランダムに配置した。ビーズの大きさは2000nm以下であり、より好ましくは10〜1000nmである。
【0117】
dNTPの蛍光標識としては、種々の蛍光体を使うことができる。たとえば、Bodipy−FL−510,R6G,ROX,Bodipy−650を使用し、これらそれぞれ異なる4種の蛍光体で標識された3′末端がアリル基で修飾された4種のdNTPを使用する。このとき、検出ユニットは、光源として、Arレーザ(488nm)、He−Neレーザ(594.1nm)、及びYAGレーザ(355nm)を備えるのが好ましい。ArレーザはBodipy−FL−510,R6G励起用、He−NeレーザはROX,Bodipy−650励起用である。また、YAGレーザは、取り込まれたdNTP誘導体の蛍光検出後、dNTP誘導体を伸長可能な状態に戻すために使用する。
【0118】
段階的伸長反応の工程例を以下に示す。ビオチン修飾したターゲットである一本鎖鋳型DNAにプライマをハイブリさせる。次に、それぞれ異なる4種の蛍光体で標識された3′末端がアリル基で修飾された4種のdNTP(3′−O−allyl−dGTP−PC−Bodipy−FL−510,3′−O−allyl−dTTP−PC−R6G,3′−O−allyl−dATP−PC−ROX,3′−O−allyl−dCTP−PC−Bodipy−650)及びThermo Sequenaseポリメラーゼを加えたThermo Sequenase Reactionバッファを注入ポートよりフローセルへ導入し、伸長反応を行う。鋳型DNA−プライマ複合体に取込まれたdNTPは、3′末端はアリル基で修飾されているため、鋳型DNA−プライマ複合体に1塩基より多く取込まれることはない。伸長反応後、未反応の各種dNTP及びポリメラーゼを洗浄用バッファで洗い流し、Arレーザ,He−Neレーザのそれぞれから発振するレーザ光を同時にフローセルに照射する。レーザ光照射により鋳型DNA−プライマ複合体に取込まれたdNTPに標識された蛍光体を励起し、そこから発する蛍光を検出ユニットの撮像装置によって検出する。鋳型DNA−プライマ複合体に取込まれたdNTPに標識された蛍光体の蛍光波長を特定することにより、取り込まれたdNTPの塩基種を特定できる。次に、YAGレーザより発振するレーザ光をフローセルに照射し、複合体に取込まれたdNTPに標識された蛍光体を光切断により取り除く。次に、パラジウムを含んだ溶液を流路内に導入し、パラジウム触媒反応により、複合体に取込まれたdNTPの3′末端のアリル基を水酸基に変える。3′末端のアリル基を水酸基に変えることにより、鋳型DNA−プライマ複合体の伸長反応が再開可能となる。この触媒反応後に、洗浄用バッファにてチャンバを洗浄する。これを繰返すことにより、固定された一本鎖鋳型DNAの配列を決定する。
【0119】
以上、本発明をDNAシーケンサに適用した実施例について説明した。しかし、本発明の適用はDNAシーケンサだけに限られるものではなく、小分子、タンパク質、抗原抗体、ホルモン、細菌などの生体分子相互作用解析など、フローセルに試薬を順次注入して分析を行う分析装置一般に適用可能である。
【0120】
なお、本発明は上記した実施例に限定されるものではなく、様々な変形例が含まれる。例えば、上記した実施例は本発明を分かりやすく説明するために詳細に説明したものであり、必ずしも説明した全ての構成を備えるものに限定されるものではない。また、ある実施例の構成の一部を他の実施例の構成に置き換えることが可能であり、また、ある実施例の構成に他の実施例の構成を加えることも可能である。また、各実施例の構成の一部について、他の構成の追加・削除・置換をすることが可能である。
【0121】
また、上記の各構成、機能、処理部、処理手段等は、それらの一部や全部を、例えば集積回路で設計する等によりハードウェアで実現してもよい。また、上記の各構成、機能等は、プロセッサがそれぞれの機能を実現するプログラムを解釈し、実行することによりソフトウェアで実現してもよい。各機能を実現するプログラム、テーブル、ファイル等の情報は、メモリやハードディスク、SSD(Solid State Drive)等の記録装置、または、ICカード、SDカード、DVD等の記録媒体に置くことができる。
【符号の説明】
【0122】
11 試薬容器
12 試薬ラック
13 試薬ラック台
14 予混合容器
15 カバー
16 開口
17 モータ
18 位置決めピン
20 サンプリングノズル
21 ガイドレール
22 直線移動ユニット
23 回転軸
24 アーム
30 フローセル
31 フローセルステージ
32 注入ポート
33 排出ポート
34 流路
35 サンプル固定層
36 上部基板
37 下部基板
38 スペーサ
40 検出ユニット
41 光源
42 撮像装置
50 制御・演算部
51 入力部
52 表示部
53 液面検知部
60 マイクロシリンジ
61 プランジャ
62 第1流路
63 第2流路
64 洗浄液タンク
65 ポンプ
66 洗浄液循環流路
67 流量調節絞り
68 洗浄槽
69 廃液タンク
71 第1電磁弁
72 第2電磁弁
81 第1洗浄液シリンジ
84 第2洗浄液シリンジ
【技術分野】
【0001】
本発明は、試料が固定されたフローセルに試薬を注入し、フローセル内で生じる反応を検出して試料の分析を行う分析装置に関する。
【背景技術】
【0002】
DNAやRNAの塩基配列決定には、これまで主に電気泳動を利用した方法が用いられてきた。この方法においては、予め配列決定用のDNA断片又はRNA試料から逆転写反応を行い合成したcDNA断片試料を調製し、周知のサンガー法によるジデオキシ反応を実行した後、電気泳動を行い、分子量分離展開パターンを計測して解析する。これに対して、近年、基板に試料となるDNA断片を数多く固定して、パラレルに数多くの断片の配列情報を決定する次世代DNAシーケンサといわれる方法が提案されている。
【0003】
この次世代DNAシーケンサでは、例えば、反応場としてのフローセルの中に試料となるDNA断片を固定した多数のビーズを配置する。そして、フローセルへ試薬を供給し、塩基の伸張反応に伴って発生する蛍光信号を検出して、試料の塩基配列を解析する。これら次世代DNAシーケンサの多くは、試薬の供給にチューブとバルブを用いた送液システムを用いている。すなわち、それぞれの試薬の供給路を構成するチューブとフローセルに接続されたチューブとの間にバルブを配置し、バルブを切り替えることによって所望の試薬をフローセルに供給する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特表2008−528040号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
チューブを通して送られてくる試薬を、切り替えバルブで切り替えてフローセルに注入する送液システムには、次のような問題がある。
【0006】
1.送液に時間を要する。
チューブの長さが長くなると、送液にかかる時間も長くなる。
2.チューブ内で試薬の混合(コンタミネーション)が発生する。
複数の試薬が同じ流路を通るため、チューブ内を十分に洗浄しないとコンタミネーションが発生する。チューブ内を洗浄する洗浄液の液量もチューブ長さに比例して増える。
また、2種類の試薬を連続して送液する場合、試薬の流速分布は栓流(plug)ではなく楕円流(parabolic)であるため、流路が長いほど試薬は混合されていく。2種類の試薬の間に空気を挟んで混合されにくい状態で送液しても、チューブが長いと試薬の拡散が避けられず、混合が生じる。
3.余分な量の試薬を必要とし、分注精度が悪い。
チューブ内で試薬の混合が生じ、混合の生じていない試薬のみをフローセルへ注入して反応させるためには、フローセルの容量以上の試薬を送液する必要がある。
4.ユーザーがチューブを交換する場合があるため、装置メンテナンスが必要である。
5.洗浄が困難な切り替えバルブ内でコンタミネーションが発生する。
次世代DNAシーケンサは、方式により異なるが、高価な試薬を使用する必要があり、反応に用いられない無駄な試薬の量を減らすことが求められている。読み取り塩基長を長くするためには試薬の混合を極力避ける必要がある。また、送液に要する時間を短縮して分析のスループットを上げることが求められている。
【0007】
本発明は、これらの要請に応えることのできる分析装置を提供するものである。
【課題を解決するための手段】
【0008】
本発明による分析装置は、複数の試薬容器を保持する試薬ラックを設置する試薬ラック設置部と、内部流路と当該内部流路に接続した注入ポート及び排出ポートを備えるフローセルを設置するフローセル設置部と、サンプリングノズルと、サンプリングノズルが液面に接触したことを検知する液面検知部と、洗浄槽と、サンプリングノズルを試薬容器、洗浄槽及びフローセルの注入ポートの間に駆動するノズル駆動機構と、フローセル内の試料に生じた変化を検出する検出部と、送液システムと、装置各部を制御する制御部とを有する。
【0009】
送液システムは、洗浄液を収容した洗浄液タンクと、サンプリングノズルに接続されサンプリングノズルの先端から液体の吸引・吐出を行うためのマイクロシリンジと、洗浄液タンクからマイクロシリンジに洗浄液を送出するための第1機構と、洗浄液タンクから洗浄槽に洗浄液を送出するための第2機構とを有する。
【0010】
制御部は、液面検知部によって試薬容器中の試薬表面を検知してからサンプリングノズルを試薬中に所定距離だけ侵入させた状態でマイクロシリンジを制御することにより、サンプリングノズルに充填された洗浄液の先に試薬容器から所要量の試薬を吸引し、サンプリングノズルをフローセルの注入ポートに挿入した状態でマイクロシリンジを制御することにより、吸引した試薬を注入ポートからフローセルに注入し、また、サンプリングノズルを洗浄槽に位置決めした状態で第1機構及び/又は第2機構を作動させることによりサンプリングノズルの内側及び/又は外側の洗浄を行う。
【0011】
上記第1機構及び第2機構は、種々の手段により実現することができる。例えば、上記第1機構及び第2機構は、それぞれ開閉自在で一方が開状態のとき他方が閉状態となるように制御される一対の弁が上流側と下流側に配置されたシリンジによって構成することができる。あるいは、洗浄液タンクから洗浄液がポンプによって吸い上げられて再び洗浄液タンクに戻される洗浄液循環流路が形成されている場合には、上記第1機構を、その洗浄液循環流路及び洗浄液循環流路とマイクロシリンジを接続する流路中に設けられた弁によって構成することができる。このとき、上記第2機構は、その洗浄液循環流路及び洗浄液循環流路と洗浄槽を接続する流路中に設けられた弁によって構成することができる。
【0012】
試薬容器からサンプリングノズルに吸引する試薬の量は、フローセルの容積以上、かつフローセルの容積に10μLを加えた量以下で十分であり、使用する試薬の量を極力減らすことができる。
【0013】
試薬ラックの上面などサンプリングノズルがアクセス可能な位置に、サンプリングノズルが接触したことを液面検知部で検出できる部材を複数備えることができる。これらの部材は、ノズル駆動機構によるサンプリングノズルの駆動校正用の部材として利用される。
【0014】
ノズル駆動機構は、一例として、ガイドレールと、ガイドレールに沿って直線移動する移動ユニットと、サンプリングノズルが固定され移動ユニットに設定された回転軸の回りに回動するアームとを有するものとすることができる。また、サンプリングノズルの駆動校正用部材は、ガイドレールに沿った方向に既知の間隔で少なくとも2個が配置され、ガイドレールに垂直な方向に既知の間隔で少なくとも2個が配置されているのが好ましい。
【0015】
制御部は、液面検知部を用いて校正用部材の位置を検知することでサンプリングノズル位置のキャリブレーションを行う機能を有する。キャリブレーション機能の実行時、制御部は、サンプリングノズルをガイドレールに沿った方向に配置された少なくとも2個の部材の位置を検知し、そのときのノズル駆動機構への駆動信号と当該2つの部材間の間隔を元に直線移動方向への移動距離と駆動信号との比である直線移動係数を求める。また、ガイドレールに垂直な方向の距離が異なる少なくとも2個の部材に対してそれぞれ2方向から位置を検知し、そのときのノズル駆動機構への駆動信号と先の求めた直線移動係数とを元に、回転軸を中心としたサンプリングノズル先端の回転半径、及び回転角度と駆動信号との比である回転移動係数とを求める。更に、ガイドレールに対して垂直な方向に既知の間隔で配置された2つの部材を検知し、そのときのノズル駆動機構への駆動信号、先に求めた直線移動係数及び回転移動係数を元に当該部材を検知しているときのアームの回転角度を求める。こうしても求められたパラメータを用いることにより、サンプリングノズルを所望の位置に正確に位置決めすることができる。
【0016】
本発明による分析方法は、先端まで洗浄液が満たされたサンプリングノズルを試薬が入った試薬容器の上方に移動させる工程、サンプリングノズルを降下させる工程、液面検知手段によって試薬容器中の試薬表面を検知してから所定距離だけ試薬中に侵入させてサンプリングノズルの降下を停止させる工程、サンプリングノズルに所要量の試薬を吸引する工程、サンプリングノズルを洗浄槽に移動させる工程、洗浄槽内でサンプリングノズル表面に洗浄液を噴霧し、サンプリングノズルの外側に付着した試薬を洗浄除去する工程、サンプリングノズルをフローセルの注入ポートの上方に移動する工程、サンプリングノズルを降下させ、先端を注入ポートに挿入する工程、サンプリングノズルに吸引した試薬をフローセルに圧入する工程、圧入動作終了後、予め決められた時間の間、サンプリングノズルを注入ポートに挿入した状態を維持する工程、その後、サンプリングノズルを注入ポートから離脱させて上昇させる工程、サンプリングノズルを洗浄槽に移動させる工程、洗浄槽内でサンプリングノズルから洗浄液を吐出してサンプリングノズルの内側を洗浄すると共に、サンプリングノズルの外側に洗浄液を噴霧して洗浄する工程、サンプリングノズルをフローセルの注入ポートの上方に移動する工程、サンプリングノズルを降下させ、先端を注入ポートに挿入する工程、サンプリングノズルから洗浄液をフローセルに注入し、未反応の試薬を洗い流す工程、フローセルを撮像し、試薬注入による変化を検出する検出工程、を有する。未反応の試薬をフローセルから洗い流す工程で使用する洗浄液には一種の試薬を用いるが、それに代えてサンプリングノズルを洗浄する洗浄液、例えば純水、を用いることもできる。洗浄液として試薬を用いる場合には、その洗浄液(試薬)も試薬ラック上に置いて、他の試薬と同様の方法でフローセルに注入できる。
【0017】
また、未反応の試薬を洗い流す工程の前に、サンプリングノズルをフローセルの注入ポートに挿入し、フローセル内の試薬を吸引する工程、サンプリングノズルを回収試薬用容器の上方に移動させる工程、吸引した試薬を回収試薬用容器に吐出する工程、を実行することで、フローセルから試薬を回収して再利用することができる。
【発明の効果】
【0018】
本発明によると、使用する試薬の量を最小限にすると共に、送液に要する時間を短縮して分析のスループットを上げることが可能になる。
【0019】
上記した以外の、課題、構成及び効果は、以下の実施形態の説明により明らかにされる。
【図面の簡単な説明】
【0020】
【図1】本発明による分析装置の一例を示す概略図。
【図2】送液システムの一例を示す概略図。
【図3】フローセルの一例を示す概略図。
【図4】フローセルの注入ポートの説明図。
【図5】洗浄槽におけるサンプリングプノズル洗浄の様子を示す概略断面図。
【図6】サンプリングノズルの洗浄時の制御手順の例を示すフローチャート。
【図7】フローセル内部洗浄時の制御手順の例を示すフローチャート。
【図8】試薬容器から試薬を吸引する手順の例を示すフローチャート。
【図9】フローセルへの試薬注入の手順の例を示すフローチャート。
【図10】サンプリングノズルの注入ポートへの挿入・離脱、及びマイクロシリンジのプランジャの駆動のタイミングと、フローセル内の圧力変化の関係を示す模式図。
【図11】検出の手順を示すフローチャート。
【図12】2種類の試薬を混合後、フローセルに注入する手順を示すフローチャート。
【図13】試薬回収の手順を示すフローチャート。
【図14】試薬ラックの他の実施例を示す断面摸式図。
【図15】送液システムの他の例を示す概略図。
【図16】サンプリングノズル移動のキャリブレーション方法を説明する図。
【発明を実施するための形態】
【0021】
以下、図面を参照して本発明の実施の形態を説明する。本発明は、フローセルに試薬を注入して結果を観察することにより試料の分析を行う方式の分析装置一般に適用可能であるが、ここでは、本発明をDNAシーケンサに適用した場合の例について説明する。
【0022】
図1は、本発明による分析装置(DNAシーケンサ)の一例を示す概略図であり、図1(a)は平面摸式図、図1(b)はその正面摸式図である。図のようにXYZ軸を設定して説明する。
【0023】
本実施例の分析装置は、複数の試薬容器11を保持する試薬ラック12を載置する試薬ラック台13、1個又は複数個のフローセル30を保持して移動可能なフローセルステージ31、先端から液体を吸引・吐出することのできるサンプリングノズル20、サンプリングノズル20を所望の3次元位置に駆動するノズル駆動機構、サンプリングノズル20を洗浄する洗浄槽68、試薬注入によってフローセル30内の試料に生じた変化を検出するための検出ユニット40を備える。サンプリングノズル20による試薬の吸引・吐出、洗浄などは、図示しない送液システムによって実行される。送液システムについては、図2を用いて詳述する。
【0024】
分析装置の各部は制御・演算部50の制御下にあり、制御・演算部50は、入力部51を介して制御・演算部50に設定されたプログラムに従って分析装置を制御して連続運転する。制御・演算部50のメモリには、分析の手順、試薬ラック12に配置されている複数の試薬容器11や洗浄槽68の座標位置、各試薬容器に入っている試薬の種類、フローセル30に試薬や洗浄液を注入する注入ポートの座標位置、検出ユニット40による検出結果の処理手順等の情報が格納されている。制御・演算部50は、メモリに格納された情報を参照しながら、分析プログラムに従って装置各部を制御し、分析を実行する。
【0025】
サンプリングノズル20は、一例として、先端部が外径1mm、内径0.5mm、長さ150mm程度の金属材料、例えばSUSでできた中空ノズルであり、後述する送液システムに接続されて、先端部に試薬ラック12に配置された所望の試薬容器11から所要量の試薬を吸引し、フローセル30等に吐出することができる。また、サンプリングノズル20は、液面検知に適した材質と構造を有する。液面検知は、例えば、金属製のサンプリングノズル20の先端が液面などの導電性領域に接触したときの静電容量変化から液面検知を行う既知の方式を用いて制御・演算部50に設けられた液面検知部53で実行される。液面検知部53から出力される液面検知信号は、その後の装置制御に利用される。図4に示すように、サンプリングノズル20の先端部は金属が露出しているが、液面検知の誤作動を避けるため、サンプリングノズル20の上部は撥水性の樹脂層25で被覆されている。
【0026】
ノズル駆動機構は、ガイドレール21、ガイドレール21に沿ってX軸方向に直線移動する直線移動ユニット22、直線移動ユニット22に設けられた回転軸23の回りに回動可能なアーム24を有する。アーム24の回転軸23と反対側の部分にサンプリングノズル20が固定されている。直線移動ユニット22は、例えば、ガイドレール21に設けられたラックと噛み合うピニオンを有し、ピニオンをステッピングモータによって回転駆動することによって、X軸方向の所望位置に移動することができる。また、回転軸23は、同様にステッピングモータによってXY平面内に回転すると共に、Z軸方向に上下動してサンプリングノズル20の先端を所望のZ軸方向位置に位置付けることができる。サンプリングノズル20は、ノズル駆動機構によるX軸方向の直線移動、回転軸23の回りの回転移動、Z軸方向の上下移動を組み合わせることにより、試薬ラック12に配置された任意の位置の試薬容器11、洗浄槽68、後述するフローセルの注入ポートにアクセスすることができる。
【0027】
検出ユニット40は、フローセルを照射する光源41、及び励起光照射によってフローセル30から発生された蛍光を色分解して検出することのできるCCD等の撮像装置42を備える。フローセル30は、フローセルステージ31によってXY軸方向に移動可能である。フローセル30は、サンプリングノズル20を介した試薬注入や洗浄等の操作を受ける際には、図示するように検出ユニット40の下方から外れた場所に位置し、検出ユニット40を用いた検出を行う際には、フローセルステージ31によって検出ユニット40の下方位置に移動される。
【0028】
入力部51から入力された入力情報、検出ユニット40による撮像画像などの分析過程の情報、現在の装置状態や装置パラメータなどの情報、分析の全工程中での終了済み工程に関する情報、分析結果などの情報は表示部52に表示される。
【0029】
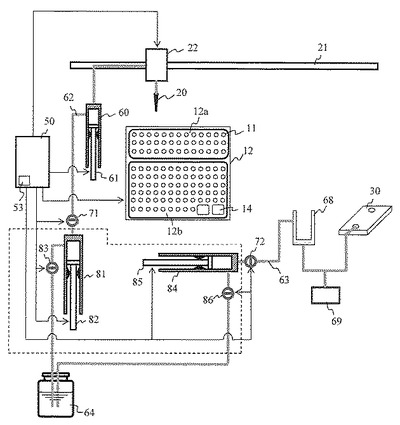
図2は、本実施例の分析装置に組み込まれている送液システムの一例を示す概略図である。サンプリングノズル20の先端からの試薬の吸引・吐出、及びサンプリングノズル20の洗浄が、この送液システムによって行われる。
【0030】
本実施例の送液システムは、サンプリングノズル20の先端から試薬を秤量して吸引・吐出するためのマイクロシリンジ60と、洗浄液をサンプリングノズル20及び洗浄槽68にそれぞれ供給する第1流路62及び第2流路63を有する。本実施例では、洗浄液タンク64に貯留された洗浄液は、連続運転されているポンプ65によって吸い上げられ、洗浄液循環流路66を通して再び洗浄液タンク64に戻される。すなわち、洗浄液はポンプ65によって洗浄液循環流路66を矢印方向に常時循環されている。第1電磁弁71を介して一端が洗浄液循環流路66と接続された第1流路62は、他端が、マイクロシリンジ60を介してサンプリングノズル20の内部に連通している。同様に第2電磁弁72を介して一端が洗浄液循環流路66と接続された第2流路63は、他端が、洗浄槽68の側壁に開口している。洗浄液としては、例えば純水が使用される。
【0031】
ノズル駆動機構によってサンプリングノズル20の先端部を洗浄槽68内に移動させ、その状態で、第1電磁弁71のみを開状態にすると、ポンプ65から圧送された洗浄液がサンプリングノズル20を通して洗浄槽68内に噴出され、それによってサンプリングノズル20の内側を洗浄することができる。洗浄中、マイクロシリンジ60のプランジャ61は動かしても、動かさなくても良い。また、第2電磁弁72のみを開状態にすると、洗浄槽68の内壁から洗浄液が噴出し、それによってサンプリングノズル20の外側を洗浄することができる。更に、第1電磁弁71及び第2電磁弁72を同時に開状態にすると、洗浄槽68内でサンプリングノズル20の内側と外側を同時に洗浄することができる。第1電磁弁71及び第2電磁弁72の開閉制御は、制御・演算部50によって行われる。
【0032】
第1流路62を介してサンプリングノズル20へ供給する洗浄液と第2流路63を介して洗浄槽68へ供給する洗浄液の割合は、第2流路63の洗浄槽68に近い箇所に設けられた流量調節絞り67により設定される。サンプリングノズル20を洗浄した洗浄液は廃液タンク69に貯留される。図示しない廃液排出ポンプを用いて、洗浄槽68に貯留された洗浄液を廃液タンク69に貯留することができる。洗浄槽68を封止して第2電磁弁72を開放して、廃液排出ポンプで引くことで、洗浄液タンク64から洗浄液を送液することもできる。また洗浄液タンク64を空にして同様の操作を行い、更に第1電磁弁71を開放することで、第1流路62、第2流路63、洗浄液循環流路66の液体を除くこともできる。またポンプ65、第2電磁弁72、配管が正しく接続されていない場合には、洗浄槽68から洗浄液が出ないため、サンプリングノズル20を洗浄できない。この場合、ノズルの液面検知機能が働かないため、故障を検知することができる。また、洗浄動作を行うことで洗浄液タンク64内の洗浄液は消費される。洗浄液タンク64には液面センサが設置され、洗浄液タンク64内の洗浄液が少なくなったときは、別途設置した図示しない洗浄液補充タンクから洗浄液タンク64に洗浄液が補充される。
【0033】
このように、本実施例の送液システムによると、ポンプによって短時間に多量の洗浄液をサンプリングノズルの内側や外側、あるいは内側と外側の両方に供給することができ、使用後にサンプリングノズルに付着している試薬を短時間で十分に洗浄することができる。従って、試薬のコンタミネーションを回避して分析精度を向上することができる。また、洗浄時間を短縮して分析のスループットを向上することができる。
【0034】
試薬ラック12には温度センサとペルチェ素子等の温度調節ユニットが設けられ、試薬容器11に保持された試薬を一定温度に維持している。例えば、試薬ラックの第1領域12aに保持されている試薬群は室温に維持され、第2領域12bに保持されている試薬群は4℃に維持されている。試薬ラック12の温度制御も、制御・演算部50から行うことができる。また、試薬の種類によっては、使用直前に複数の試薬を混合してからフローセルに供給することが望ましいものがある。そのため、試薬ラック12には、混合試薬の調製に使用するための予混合容器14が設けられている。混合試薬の使用に当たっては、別々の試薬容器11からサンプリングノズル20によって吸引したそれぞれの試薬を一旦、予混合容器14内に吐出し、予混合容器14内で混合して調製された混合試薬を再びサンプリングノズル20で吸引してフローセル30に供給する。
【0035】
図3は、フローセルの一例を示す概略図である。図3(a)はフローセルの斜視図、図3(b)は図3(a)のX−X’断面図である。
【0036】
この例のフローセルは、注入ポート32と排出ポート33、及び液が流れる流路34を有する。DNAシーケンサ用フローセルは、核酸試料を表面に有するビーズ等の担体あるいは遊離の核酸試料が流路内に含まれるように設計されており、核酸試料を表面に有するビーズ等の担体あるいは遊離の核酸試料が結合するサンプル固定層35を備える上部基板36と、下部基板37とを有する。上部基板36と下部基板37との間に流路34が形成される。流路34は、核酸分析のための反応に必要な試薬が供給される流路として機能するとともに、反応が起こる反応チャンバとしても機能する。また、流路34のための空間を確保するために、上部基板36と下部基板37の間にはスペーサ38が配置されている。すなわち、図3に示したフローセルは、上部基板36と、流路に相当する部分がくり貫かれたスペーサ38と、下部基板37とが貼り合わされた構造を有する。反応溶液は、注入ポート32より注入されて、排出ポート33より排出される。一例として、スペーサの厚さは50〜100μm、スペーサをくり貫いて形成された流路の幅は20〜30mm、流路の長さは75〜100mmとすることができるが、これらの数値に限定されるものではない。
【0037】
検出ユニット40に対向する側の上部基板36は、励起光及び蛍光を透過することのできるガラス、石英、サファイア、あるいはアクリル樹脂やシクロオレフィンポリマー等の樹脂からなる。サンプル固定層35は無機酸化物で形成されている。固定層を形成する無機酸化物はチタニア、ジルコニア、アルミナ、ゼオライト、五酸化バナジウム、シリカ、サファイア、酸化タングステン及び五酸化タンタルからなる群から選択され、これらの少なくとも2種類の混合物であってもよい。この中でも、チタニア、ジルコニア、アルミナ、ゼオライト、五酸化バナジウム、又はこれらの混合物が望ましい。これらの無機酸化物は核酸試料分子内のリン酸部位、又はリン酸エステル部位と結合することで、核酸試料をサンプル固定層へ結合することができる。特に、チタニア、ジルコニア、アルミナ、ゼオライト、五酸化バナジウムは、DNAが結合し得る求電子性の大きいルイス酸サイトやブロンステッド酸サイトが多く含まれる。
【0038】
注入ポート32より核酸試料を表面に有するビーズ等の担体又は遊離の核酸試料を含む水溶液を注入した後、一定時間保持してサンプル固定層35上に核酸試料を固定する。この際、核酸試料を表面に有する担体又は遊離の核酸試料がサンプル固定層35上にほぼ均一に固定される。その後、カルボン酸化合物、リン酸化合物、硫酸化合物、ニトリル化合物、それらの塩、及びそれらの化合物の少なくとも2種類の混合物からなる群から選ばれる化合物の水溶液を同様に注入してブロッキング層を形成する。これらの化合物は、無機酸化物に特異的に結合するものであり、核酸試料とサンプル固定層結合部位以外の領域を、被覆率の高い状態でブロッキングすることができる。ブロッキング層により、核酸試料とサンプル固定層結合部への反応溶液の浸透を防ぐことで、サンプル固定層からの核酸試料のはがれを防止することができる。
【0039】
図3には、流路が3つ形成されたフローセルの例を示すが、流路の数は3つに限定されない。流路の数が多い場合、一度に多数の反応を行うことができ、高スループットの分析が可能である。核酸試料が内部の流路に固定されたフローセルを、分析装置のフローセルステージにセットし核酸分析を行う。分析中、フローセルは、フローセルステージが備える温度制御ユニットによって所定の温度に制御される。
【0040】
図4は、フローセルの注入ポートに挿入されたサンプリングノズルの様子を示す断面模式図である。
【0041】
フローセルの注入ポート32はpeek樹脂製で、上部が内径3mm程度、下部がサンプリングノズル20先端の外径と同じ内径1mm程度となったテーパ状(すり鉢状)の開口部を有する。注入ポート32は、Oリング39aを介してフローセルの上部基板36に液密に接続され、側面と上面の肩部を覆う固定部材39bによってフローセルに固定されている。サンプリングノズル20は、上方から下降して注入ポート32に挿入され、わずかな先細りのテーパを有するノズル先端が、図に○印で示すように、注入ポート32のテーパ部分に接触することによってシールがなされる。
【0042】
次に、分析装置の試薬ラック台13に試薬ラック12を設置し、フローセルステージ31にフローセル30を設置した状態から、試薬をフローセルに供給して分析を行う手順について説明する。
【0043】
(1)サンプリングノズル洗浄
まず、サンプリングノズル20の洗浄を行う。このときの制御・演算部50による制御の手順を図6に示す。
【0044】
制御・演算部50は、最初にノズル駆動機構を制御して、サンプリングノズル20を洗浄槽68に移動する(S11)。次に、制御・演算部50は、ポンプ65によって洗浄液が循環している洗浄液循環流路66に接続されている第1電磁弁71を制御して開状態にする(S12)。マイクロシリンジ60のプランジャ61は、洗浄中であれば動かしても動かさなくてもよい。この状態では、ポンプ65から圧送された洗浄液が、第1電磁弁71、第1流路62を通ってマイクロシリンジ60に入り、そのままサンプリングノズル20を通ってノズル先端から洗浄槽68内に噴出される。この状態で、ノズル内側の洗浄が行われる。洗浄液としては純水を使用した。
【0045】
次に、制御・演算部50は、洗浄液循環流路66に接続している第2電磁弁72を制御して開状態にする(S13)。すると、ポンプ65から圧送された洗浄液が、第2電磁弁72、第2流路63を通って洗浄槽68の内壁から洗浄槽内に噴出し、洗浄槽68内に位置しているサンプリングノズル20の外側が洗浄される。こうして、図5に示すように、サンプリングノズル20の内側と外側の洗浄が行われる。洗浄が終了したら、制御・演算部50は、第1電磁弁71及び第2電磁弁72を閉じる(S14)。
【0046】
なお、最初に第1電磁弁71を開いて、次に第2電磁弁72を開く代わりに、第1電磁弁71と第2電磁弁72を同時に開いてもよい。この場合には、サンプリングノズルの内側と外側の洗浄が同時に行われることになる。また、洗浄の順序を、最初にノズルの外側とし、次にノズルの内側としてもよい。
【0047】
いずれの場合でも、サンプリングノズル内側の洗浄が終了し、第1電磁弁71を閉じた時点で、洗浄液循環流路66に接続されている第1流路62から、マイクロシリンジ60、及びサンプリングノズル20の先端までが、洗浄液で満たされた状態になる。
【0048】
本実施例の洗浄方法は、短時間に多量の洗浄液をサンプリングノズルの内側や外側、あるいは内側と外側の両方に供給することができ、洗浄時間を短縮して分析のスループットを向上することができる。
【0049】
(2)フローセル洗浄
次に、フローセル30の内部を洗浄する。図5は、洗浄槽におけるサンプリングプノズル洗浄の様子を示す概略断面図である。このときの制御・演算部50による制御の手順を図7のフローチャートに示す。
【0050】
制御・演算部50は、ノズル駆動機構を制御して、サンプリングノズル20をフローセル30の注入ポート32の上方位置に移動させる(S21)。次に、サンプリングノズルを下降させ、図4に示したように、ノズル先端を注入ポートに挿入させる(S22)。
【0051】
このとき、フローセルの注入ポートの位置とサンプリングノズルの先端位置に1〜2mm程度の誤差があっても、ノズル先端が注入ポートのテーパに倣って挿入され、完全なシールがなされるように、サンプリングノズル20の後端が固定されているアーム24の剛性が設定されている。サンプリングノズルは、金属製ではあるが、細いため、大きな剛性を持たせることができない。従って、通常の自動分析装置のようにアーム24の剛性を大きく設定すると、フローセルの注入ポートに対してサンプリングノズル先端の位置決め誤差が生じた場合、その誤差はサンプリングノズルが曲がることによって吸収することになる。すると、回転軸23に対するサンプリングノズル20の先端位置の関係が当初の設定から狂い、ノズル先端を正確に位置決めすることができなって、所望の試薬の吸引やフローセルへの試薬注入ができなくなるという問題が生じる。従って、注入ポートに対するサンプリングノズル先端の位置決め誤差があった場合、サンプリングノズルの曲がりだけでその誤差を吸収するのではなく、極力、アーム24側の柔軟性でも吸収できるように、アーム24の剛性を低めに設定してある。このようにアームは、サンプリングノズルがフローセルのテーパ状の注入ポートへ挿入されるとき、アーム自体も撓むように剛性を小さくすることで、サンプリングノズルと共にアームも撓んで、ノズル駆動機構によるサンプリングノズルの位置決め誤差を吸収するように作製されている。
【0052】
次に、制御・演算部は、第1電磁弁71を開く(S23)。このとき、マイクロシリンジ60のプランジャ61は固定しておいてもよいし、動かしてもよい。すると、ポンプ65から圧送された洗浄液が、第1電磁弁71、第1流路62を通ってマイクロシリンジ60に入り、更にサンプリングノズル20の先端から注入ポート32を通ってフローセル30の流路34に流れ込み、フローセルの洗浄が行われる。フローセルの流路を洗浄した洗浄液は、廃液タンク69に溜められる。予め設定された時間の間、第1電磁弁71を開いてフローセルの洗浄が終了したら、制御・演算部50は、第1電磁弁71を閉じる(S24)。その後、制御・演算部50は、ノズル駆動機構を制御してサンプリングノズル20を上昇させ、注入ポート32から離す(S25)。このとき、制御・演算部50は、第1電磁弁71を閉じて直ちにノズル駆動機構にサンプリングノズルの上昇を指令するのではなく、フローセル内における洗浄液の圧力が安定するまでの時間として予め定められた時間だけ待ってからサンプリングノズルの上昇を指令する。これについては、フローセルへの試薬注入の個所で更に詳述する。
【0053】
(3)試薬容器からの試薬吸引
図8のフローチャートを参照して、試薬ラック12中の所定位置の試薬容器11からサンプリングノズル20によって試薬を吸引する手順について説明する。
【0054】
制御・演算部50は、予めプログラムされている手順に従って、吸引すべき試薬の種類及び吸引量を決定し、次に、メモリに格納されている試薬容器の位置と試薬の種類との対応関係の情報を参照してサンプリングノズルの移動位置を決定する。次に、制御・演算部50は、ノズル駆動機構を制御して、サンプリングノズル20を目的の試薬が入っている試薬容器の上方位置に移動させる(S31)。続いて、サンプリングノズルを下降させてノズル先端を試薬容器内に挿入していく(S32)。このとき、液面検知部53による液面検知機能を利用して試薬容器内の試薬液面を検知する。試薬液面を検知したら、そこから更に一定距離だけサンプリングノズルを下降させ、ノズル先端が所定深さだけ試薬溶液内に挿入した状態で、サンプリングノズルを停止させる(S33)。次に、制御・演算部50は、マイクロシリンジ60のプランジャ61を吸引側に所定量だけ駆動し、サンプリングノズル20に充填されている洗浄液の先に、決められた量の試薬を吸引して保持する(S34)。
【0055】
次に、制御・演算部50は、ノズル駆動機構を制御してサンプリングノズルを上方に駆動してノズル先端を試薬容器から出し、更にサンプリングノズルを洗浄槽68に移動させる(S35)。その後、制御・演算部50は、第2電磁弁72を開く。すると、洗浄槽68の内壁面から洗浄液が噴出し、サンプリングノズル20の外側に付着した試薬を洗い流す(S36)。サンプリングノズルに吸引した試薬は、洗浄されずにそのままノズル内に保持される。サンプリングノズル外側の洗浄が終わると、制御・演算部50は、第2電磁弁72を閉じ、ノズル駆動機構を制御してサンプリングノズル20を上方に移動させる。
【0056】
液面検知機能を利用してサンプリングノズル20の先端は試薬中に必要最小限の深さだけ挿入されているため、サンプリングノズル20の外側に付着し、洗浄槽68で洗い流される試薬の量を常に最小限度に抑制することができる。また、試薬の液面検知を行うことの別の利点として、試薬容器の形状と液面高さの情報から試薬残量を知ることができる。これにより解析できる残り塩基数を計算したり、ユーザーに試薬交換の時期を知らせたりすることが可能になる。
【0057】
(4)フローセルへの試薬注入
図9のフローチャートを参照して、サンプリングノズル20の先端に吸引・保持している試薬をフローセル30に注入する手順について説明する。
【0058】
最初に、制御・演算部50は、ノズル駆動機構を制御してサンプリングノズル20をフローセル30の注入ポート32の上方位置に移動させる。次に、サンプリングノズル20を下降させ、図4に示したように、ノズル先端を注入ポート32に挿入させる(S41)。注入ポート32に対するサンプリングノズル20の先端の位置決め誤差があった場合、サンプリングノズル20の後端部が固定されているアーム24の柔軟性によってその誤差が吸収され、サンプリングノズルにダメージを与えることなく、注入ポート32のテーパに倣ってノズル先端が注入ポート32に挿入される。続いて、制御・演算部50は、マイクロシリンジ60のプランジャ61を吐出方向に駆動し、サンプリングノズル20に充填されている洗浄液の先に吸引した試薬を、注入ポート32を通してフローセル30に注入する(S42)。制御・演算部50は、プランジャ61の駆動が完了した後、フローセル30内の圧力が安定するまで待って(S43)、ノズル駆動機構を制御してサンプリングノズルを上方に引き上げる(S44)。
【0059】
図10は、注入ポートへのサンプリングノズルの挿入・離脱、及びマイクロシリンジのプランジャの駆動のタイミングと、フローセル内の圧力変化の関係を示す模式図である。横軸は時間である。図10は、サンプリングノズル20が時刻t0にフローセルの注入ポート32に挿入され、時刻t4に注入ポート32から上方に引き上げられることを示している。また、マイクロシリンジ60のプランジャ61は時刻t1〜t2に亘って、試薬吐出のために駆動されている。
【0060】
試薬は、マイクロシリンジ60のプランジャ61を駆動してコンダクタンスの小さなフローセルの流路に加圧注入されている。そのため、プランジャ61の駆動停止直後(時刻t2)にはフローセル30内の圧力が高く、サンプリングノズル20をすぐに注入ポート32から引き離すと、試薬が逆流して注入ポート32からあふれ出すことがある。本実施例では、試薬注入動作終了時刻t2から、フローセル30内の圧力が安定するまでの時間待った後、サンプリングノズル20を注入ポート32から離して上方に引き上げる。すなわち、サンプリングノズル20を注入ポート32から引き上げる時刻t4を、t4>t3に設定する。フローセル内の圧力が安定するまでの待ち時間(t3−t2)は、注入する試薬の粘性、注入速度、フローセルの流路抵抗などに依存して決まるが、典型的には0.5秒から1秒程度待てばよい。
【0061】
フローセルへの試薬注入後、制御・演算部50は、ノズル駆動機構を制御してサンプリングノズル20を洗浄槽68に移動する。そして、「(1)サンプリングノズル洗浄」に示した手順にてサンプリングノズルの内側及び外側を洗浄し、次の動作に備える。
【0062】
なお、本実施例に示した試薬吸引及び試薬注入の手順に従うと、サンプリングプローブからフローセルに注入すべき試薬の量は、フローセルの容積に、フローセルの注入ポート32の個所で生じるデッドスペース分の容積を余分に付加した量で十分である。デッドスペースの容積は、5μL以下と見積もられる。従って、フローセル30に注入すべき試薬の量、すなわち試薬容器11からサンプリングノズル20に吸引すべき試薬の量は、少なくともフローセル20の容積分が必要ではあるが、フローセルの容積分にせいぜい5μLから10μL程度を付加した量で十分である。従って、本実施例によると、フローセルに注入するために試薬容器から吸引する試薬量が少なく、サンプリングノズル20の外側に付着して洗い流される試薬量が少ない。つまり、使用試薬の量が少なく、試薬の無駄も少ない。こうして、本実施例によると、高価な試薬を有効に活用することが可能になる。
【0063】
更に、本実施例ではサンプリングノズルで試薬吸引とフローセルへの送液を実現しており、チューブと切り替えバルブを用いた方式に比べて送液時間を短縮することが可能である。また、試薬キャリーオーバが非常に少なく、より純粋な試薬をフローセルに供給できるため、解読塩基数の限界をのばすことができる。
【0064】
(5)検出
次に、検出の手順について、図11のフローチャートを参照して説明する。
フローセル内に試薬を注入した後、フローセル30の温度を反応に適した温度に制御する(S51)。こうしてフローセルの流路内に固定された核酸試料と試薬を温度調整することで反応が起こる。反応終了後、制御・演算部50は、上記「(2)フローセル洗浄」に説明した処理、又は試薬ラック12に置かれた洗浄液(試薬)に対して「(3)試薬容器からの試薬吸引と(4)フローセルへの試薬注入」に説明した処理を実行し、セル内を洗浄して未反応の試薬を洗い流す(S52)。次に、制御・演算部50は、フローセルステージ31を駆動制御し、フローセル30を検出ユニット40の下方位置に移動させる(S53)。次に、制御・演算部50は、検出ユニット40から励起光を照射し、フローセル30内の核酸試料から発せられる蛍光を検出する(S54)。
【0065】
(6)予混合セルでの試薬混合
使用の直前に2種類の試薬(第1の試薬と第2の試薬)を混合してからフローセルに注入する手順について、図12のフローチャートを参照して説明する。
【0066】
最初に、制御・演算部50は、ノズル駆動機構を制御してサンプリングノズル20を第1の試薬が入っている試薬容器の上方に移動させる(S61)。次に、制御・演算部50は、サンプリングノズル20を下降させてノズル先端を第1の試薬の試薬容器内に挿入する(S62)。このとき、液面検知機能を利用して試薬液面を検知する。試薬液面を検知したら、そこから更に一定距離だけサンプリングノズル20を下降させ、ノズル先端が所定深さだけ試薬溶液内に挿入した状態で、サンプリングノズル29の下降を停止させる(63)。次に、制御・演算部50は、マイクロシリンジ60のプランジャ61を吸引側に所定量だけ駆動し、サンプリングノズル20に充填されている洗浄液の先に、第1の試薬を決められた量だけ吸引して保持する(S64)。
【0067】
次に、制御・演算部50は、ノズル駆動機構を制御してサンプリングノズル20を上方に駆動してノズル先端を第1の試薬の試薬容器から出し、更にサンプリングノズル20を洗浄槽68に移動させる(S65)。その後、制御・演算部50は、第2電磁弁72を開く。すると、洗浄槽の内壁面から洗浄液が噴出し、サンプリングノズルの外側に付着した第1の試薬が洗い流される(S66)。液面検知機能を利用してノズル先端を第1の試薬中に必要最小限の深さだけ挿入しているため、サンプリングノズルの外側に付着し、洗い流される第1の試薬の量は極微量である。サンプリングノズル外側の洗浄が終わると、制御・演算部50は、第2電磁弁72を閉じる。
【0068】
次に、制御・演算部50は、ノズル駆動機構を制御してサンプリングノズル20を予混合容器14の上方に移動させた後、下降させ、サンプリングノズルを予混合容器に挿入する(S67)。その後、制御・演算部50は、マイクロシリンジ60のプランジャ61を吐出方向に駆動し、サンプリングノズル20に充填されている洗浄液の先に吸引した第1の試薬を、予混合容器14中に吐出する(S68)。
【0069】
次に、制御・演算部50は、ノズル駆動機構を制御してサンプリングノズル20を洗浄槽68に移動する(S69)。そして、「(1)サンプリングノズル洗浄」に示した手順にてサンプリングノズル20の内側及び外側を洗浄する(S70)。
【0070】
次に、制御・演算部50は、ノズル駆動機構を制御してサンプリングノズル20を第2の試薬が入っている試薬容器上方に移動させる(S71)。次に、制御・演算部50は、サンプリングノズル20を下降させてノズル先端を第2の試薬の試薬容器内に挿入する(S72)。このとき、液面検知機能を利用して試薬液面を検知する。試薬液面を検知したら、そこから更に一定距離だけサンプリングノズル20を下降させ、ノズル先端が所定深さだけ試薬溶液内に挿入した状態で、サンプリングノズルの下降を停止させる(S73)。次に、制御・演算部50は、マイクロシリンジ60のプランジャ61を吸引側に所定量だけ駆動し、サンプリングノズル20に充填されている洗浄液の先に、第2の試薬を決められた量だけ吸引して保持する(S74)。
【0071】
次に、制御・演算部50は、ノズル駆動機構を制御してサンプリングノズル20を洗浄槽68に移動する(S75)。そして、制御・演算部50は、洗浄液循環流路66に接続している第2電磁弁72を制御して開状態にする。すると、ポンプ65から圧送された洗浄液が、第2電磁弁72、第2流路63を通って洗浄槽68の内壁から噴出し、洗浄槽68内に位置しているサンプリングプノズル20の外側が洗浄される(S76)。洗浄が終了したら、制御・演算部は、第2電磁弁を閉じる。
【0072】
次に、制御・演算部50は、ノズル駆動機構を制御してサンプリングノズル20を予混合容器14の上方に移動させた後、下降させ、サンプリングノズル20を予混合容器14に挿入する(S77)。その後、制御・演算部50は、マイクロシリンジ60のプランジャ61を吐出方向に駆動し、サンプリングノズル20に充填されている洗浄液の先に吸引した第2の試薬を、予混合容器13中に吐出する(S78)。
【0073】
次に、制御・演算部50は、サンプリングノズル20を予混合容器13の底部に衝突しないようにして第1の試薬と第2の試薬の混合液中に所定深さまで挿入させる。その後、制御・演算部50は、マイクロシリンジ60のプランジャ61を吸引側と吐出側に交互に数回駆動し、第1の試薬と第2の試薬の混合液のサンプリングノズルへの吸引、予混合容器14内への吐出を反復することで、第1の試薬と第2の試薬を十分に混合させる(S79)。このとき、プランジャ61を吐出側に過剰に駆動して、サンプリングノズル20から洗浄液が予混合容器14内に吐出されないようにする。
【0074】
予混合容器14内での第1の試薬と第2の試薬の混合が完了したら、制御・演算部50は、マイクロシリンジ60のプランジャ61を吸引側に駆動して、混合液をサンプリングノズル20の先端に吸引する(S80)。
【0075】
その後、制御・演算部50は、ノズル駆動機構を制御してサンプリングノズル20を洗浄槽68に移動させる(S81)。そして、制御・演算部50は、洗浄液循環流路66に接続している第2電磁弁72を制御して開状態にする。すると、ポンプ65から圧送された洗浄液が、第2電磁弁72、第2流路63を通って洗浄槽68の内壁から噴出し、洗浄槽68内に位置しているサンプリングプノズル20の外側が洗浄される(S82)。洗浄が終了したら、制御・演算部50は、第2電磁弁72を閉じる。
【0076】
次に、制御・演算部50は、上記「(4)フローセルへの試薬注入」に示した手順に従って、第1の試薬と第2の試薬の混合試薬をフローセル30に注入する(S83からS86)。
【0077】
フローセルへの混合試料注入後、上記「(1)サンプリングノズル洗浄」に示した手順にてサンプリングノズル20の内側及び外側を洗浄する(S70)。
【0078】
その後、必要があれば予混合容器14の洗浄を行う。予混合容器14の洗浄に当たって、制御・演算部50は、サンプリングノズル20を使用後の予混合容器14へ移動させ、第1電磁弁71を開いて十分な量の洗浄液を予混合容器14内に注入する。その後、制御・演算部50は、マイクロシリンジ60のプランジャ61を吸引側と吐出側に交互に数回駆動し、予混合容器14の内壁に付着した試薬を洗浄液によって洗い流す。予混合容器内壁の洗浄が終わったら、制御・演算部50は、マイクロシリンジ60のプランジャ61を吸引側に駆動して、予混合容器14内の洗浄液をサンプリングノズル20に吸引する。その後、制御・演算部50は、サンプリングノズル20を洗浄槽68に移動させ、第1電磁弁71と第2電磁弁を開いて、吸引した洗浄液を放出させるとともに、サンプリングノズル20の内側と外側を洗浄する。
【0079】
なお、ここでは2種類の試薬を混合する例について説明したが、3種類以上の試薬を混合して調製した混合試薬をフローセルに注入する場合の手順も、上記と同様の原理に基づいて行うことができる。また、複数種類の試薬を連続的に吸引してから、予混合容器14へ一括して吐出することもできる。
【0080】
また、洗浄液が満たされているサンプリングノズル先端への吸引、吐出という動作に基づく本実施例の送液システムを用いると、フローセルに注入して反応が終了した後の試薬を、注入ポートからサンプリングノズルで吸引して別の反応に再利用することが可能である。フローセルに注入された試薬のうち実際に反応に使われて消費されるのは全試薬量の1%に満たない。そのため、反応終了後にフローセルから回収した試薬は、十分に再利用可能な濃度及び純度を持っている。
【0081】
図13は、フローセルからの試薬回収の手順を示すフローチャートである。試薬の回収は、フローセル内での反応が終了した段階で、洗浄液によって試薬を洗い流すタイミングの前に実行する。
【0082】
制御・演算部50は、ノズル駆動機構を制御してサンプリングノズル20を反応が終了したフローセル30の注入ポート32に挿入する(S91)。次に、マイクロシリンジ60のプランジャ61を吸引側に駆動し、フローセル30内の試薬を吸引する(S92)。次に、制御・演算部50は、ノズル駆動機構を制御してサンプリングノズル20を試薬ラック12に用意されている回収試薬用の容器に移動させ(S93)、その容器内に吸引した試薬を吐出して回収する(S94)。当然ながら、回収試薬用の容器は、試薬の種別ごとに別々に用意する。試薬の回収が終わったら、制御・演算部50は、ノズル駆動機構を制御してサンプリングノズル20を洗浄槽68に移動し、サンプリングノズル20の内側及び外側の洗浄を行い、次の動作に備える。回収試薬用の容器に回収した試薬は、通常の試薬容器の試薬と同様に使用することができる。本実施例によると、更に効率的な試薬の利用が可能になり、分析コストの低減に寄与する。
【0083】
図14は、試薬ラックの他の実施例を示す断面摸式図である。本実施例の試薬ラックは、上面にスライド式に移動可動なカバー15を有する。上部が開放した容器に試薬を入れておくと、試薬が蒸発したり、酸化が進むなどの問題が生じることがある。そのため、試薬ラック12上に、試薬容器の位置に合わせてサンプリングノズルの先端部が通過することのできる複数の開口16が設けられているカバー15を配置した。カバー15は、制御・演算部50からの指令で駆動されるモータ17によって、一軸方向にスライド式に移動可能になっている。カバー15は、使用していない試薬容器に対しては開口の位置がずれて容器上部を覆い、使用する試薬容器に対しては開口の位置が一致してサンプリングノズルによるアクセスが可能なようにモータ17で位置決めされる。本実施例によると、試薬の蒸発や酸化の問題が軽減される。
【0084】
以上の実施例では、試薬は、サンプリングノズルに充填されている洗浄液の先端に、洗浄液と界面が接した状態で吸引されるものとして説明した。しかし、試薬吸引の前に空気を例えば5μL程度吸引して、洗浄液と試薬の間に空気層を形成することで、洗浄液に接触しないようにして試薬をサンプリングノズルの先端に吸引、保持することも可能である。この場合において、フローセルへの試薬吐出時にフローセル内に空気が導入されないようにするには、試薬を予め少し多めに吸引しておき、フローセルへの試薬注入の際に、サンプリングノズル内に試薬が少し残るようにして吐出すればよい。
【0085】
また、上記実施例の送液システムは、ポンプ65を備える洗浄液循環流路66を有し、洗浄液は洗浄液循環流路66から電磁弁71,72を介して第1流路62あるいは第2流路63に供給する構成をとったが、洗浄液循環流路は必ずしも必須ではない。
【0086】
図15は、洗浄液循環流路を持たない送液システムの例を示す概略図である。本実施例の送液システムは、破線内の要素が図2の実施例に示した送液システムとは異なる。本実施例の送液システムは、サンプリングノズル20に連通する第1流路62に配置された第1電磁弁71の上流側に、洗浄液送出用の第1洗浄液シリンジ81を有し、第1洗浄液シリンジ81と洗浄液タンク64の間に第3電磁弁83を備える。また、洗浄槽68の内壁に開口する第2流路63に配置された第2電磁弁72の上流側に、洗浄液送出用の第2洗浄液シリンジ84を有し、第2洗浄液シリンジ84と洗浄液タンク64の間に第4電磁弁86を備える。制御・演算部50は、第1電磁弁71、第2電磁弁72の制御に加えて、第3電磁弁83と第1洗浄液シリンジ81のプランジャ82、第4電磁弁86と第2洗浄液シリンジ84のプランジャ85の制御を行う。
【0087】
サンプリングノズル先端からの洗浄液吐出は、次の手順に従って実行される。制御・演算部50は、第1電磁弁71が閉じ、第3電磁弁83が開いた状態で、第1洗浄液シリンジ81のプランジャ82を吸引方向に駆動し、洗浄液タンク64から第1洗浄液シリンジ81に洗浄液を吸引する。洗浄液の吸引が終わったら、第3電磁弁を閉じる。ここまでの工程は、サンプリングノズルから洗浄液の吐出を行っていない空き時間に実行し、予め準備しておいてもよい。その後、洗浄液吐出が求められているタイミングで、制御・演算部50は、第1電磁弁71を開き、プランジャ82を吐出方向に駆動する。これにより、サンプリングノズル20の先端から洗浄液が吐出される。マイクロシリンジ60のプランジャ61は固定したままとする。なお、プランジャ82の駆動と同時にマイクロシリンジ60のプランジャ61も吐出方向に駆動すると、サンプリングノズルから吐出される洗浄液の流速を増大することができる。
【0088】
洗浄槽68の内壁から洗浄槽68内に洗浄液を噴出させるための手順は、以下のとおりである。制御・演算部50は、第2電磁弁72が閉じ、第4電磁弁86が開いた状態で、第2洗浄液シリンジ84のプランジャ85を吸引方向に駆動し、洗浄液タンク64から第2洗浄液シリンジ84に洗浄液を吸引する。洗浄液の吸引が終わったら、第4電磁弁を閉じる。ここまでの工程は、洗浄槽68内に洗浄液の噴出を行っていない空き時間に実行し、予め準備しておいてもよい。その後、洗浄槽68への洗浄液噴出が求められているタイミングで、制御・演算部50は、第2電磁弁72を開き、プランジャ85を吐出方向に駆動する。これにより、洗浄槽68の内壁から洗浄液が噴出される。
【0089】
マイクロシリンジ60を用いた試薬の吸引・吐出の動作については、図2に示した送液システムの場合と同じである。
【0090】
実際の装置では、サンプリングノズル20と注入ポート32との位置の誤差を±1mm以下、好ましくは±0.5mm以下にすることが必須となる。但し、例えサンプリングノズル20に触れない限り、初期設定値の誤差が変わらない構造を実現したとしても、実際にはサンプリングノズル20を交換した場合や誤って触れたり曲げたりした場合、回転軸23に対するサンプリングノズル20の先端の回転半径が変わることがある。例えば回転半径が100mmで、サンプリングノズル20が1mm外側へ曲がった場合、回転半径は101mm、内側へ曲がった場合、回転半径は99mmとなる。このような場合に備えてサンプリングノズル20の位置をキャリブレーションする必要がある。サンプリングノズルの曲がりが大きい場合、サンプリングノズル20を下降させたとき例えばカバー15へぶつかるが、ぶつかることでサンプリングノズル20が上側へ持ち上げられることを検知する図示しないジャミングセンサがあれば、位置ずれをキャリブレーションしないことによるサンプリングノズル20の破損を防ぐことはできる。但し、位置ずれが発生するたびに、サンプリングノズル20の位置を動かして、試薬容器11、洗浄槽68、注入ポート32の位置を目視で再度合わせるのは時間を要するだけでなく、合わせる人によって誤差が変わってしまうため、サンプリングノズル20が注入ポート32へ入ることを保証できなくなる。従って、自動でサンプリングノズル20のキャリブレーションを行う方法が必要となる。
【0091】
試薬ラック12、試薬ラック12上に設置するカバー15、洗浄槽68、フローセルステージ31、注入ポート32などに位置決めピン18を設置することにより、自動でサンプリングノズル20の位置を合わせる方法を以下に記載する。但し、位置決めピン18の位置や個数は、図示したものに限定されるものではない。位置決めピンはサンプリングノズル外径程度(例えば0.1〜1mmであるが、これらに限定されるものではない)の金属部分(導電性部分)を含んでおり、図14に破線で囲んで示したピン18cの拡大図のように、その周囲はプラスチックなどの非導電性物質で覆われている。あるいはその逆で、開口16のように位置決め部分が非導電性物質で液面検知せずに、それ以外の部分が導電性物質で液面検知できるようにすることもできる。但し、位置決めピン18の構造はこれに限定されるものではない。アーム24が下降してサンプリングノズル20の先端が位置決めピン18の導電性部分へ接触すると、液面検知機能が働く。これは液面検知機能が導電性部分に接触することで機能することを利用している。一方、アーム24が非導電性部分へ接触すると、液面検知機能が働かない。従って、アーム24の位置を少しずつ動かしながら液面検知が働く範囲を求めることで、位置決めピン18の中心を求めることができる。
【0092】
1箇所の位置決めピン18の位置を求めるだけでは、自動で精度良くキャリブレーションすることはできない。これは例えば装置が大きくなればなるほど、アーム24の移動量が大きくため、誤差が積み重なるためである。例えば、直線移動ユニット22が500mm移動することを考える。直線移動ユニット22は、例えば、図示しないモータが回転することで、それに付随する図示しない歯車が回転し、歯車に取り付けられた図示しないベルトが回転することで、ガイドレール21に沿って移動する構造とすることができる。歯車直径がφ10mmの場合、アーム24は例えば50回転で500mmの距離を移動するが、歯車直径には機械誤差が存在する。歯車直径が10.05mmと50μm大きかった場合、50回転で502.5mmと2.5mm余分に多く移動する。従って、位置決めピンを用いて複数の位置を求めて、機械公差を含む下記のパラメータを算出することで、サンプリングノズル20のキャリブレーションが可能となる。
【0093】
試薬ラック12で距離既知の長方形を構成するように4つの位置決めピン18を配置した図16の例を用いて、キャリブレーション方法を説明する。但し、位置決めピン18の位置と個数はこれに限定されるものではない。本キャリブレーションは、サンプリングノズル20から注入ポート32までの距離などが短い場合には発生しないため、新たな技術的課題である。
【0094】
いま、図16に示すように、試薬ラック12上に4個の位置決めピンA〜Dが設置されているものとする。各位置決めピンの位置は既知であり、位置決めピンA,B間及び位置決めピンC,D間は既知の距離dだけ離れており、位置決めピンA,C間及び位置決めピンB,D間は既知の距離Δyだけ離れている。位置決めピンA,Bを結ぶ直線、及び位置決めピンC,Dを結ぶ直線はガイドレール21に平行であるとする。アームの位置及び回転軸回りの姿勢は、ガイドレール21に沿ったX軸方向への移動と、回転軸の回りへの回転角度によって決まる。ここでは、アームのX軸方向への移動及び回転軸の回りへの回転は、いずれもステッピングモータをパルス駆動することにより行われるものとする。そして、サンプリングノズルを用いた液面検知機能によって、サンプリングノズルの先端を位置決めピンAの中心に位置づけた状態のアーム24Aを、X駆動ステッピングモータへの駆動パルス数XAとアームを回転させるステッピングモータへの駆動パルス数TAの組を用いて、(XA,TA)のように表示する。XA,TAはいずれも計測可能な量である。
【0095】
キャリブレーションは、次のステップ1〜5により実行される。
(1)ステップ1
図16の破線は、アーム24を移動してサンプリングノズル20によって各位置決めピンを検出したときのアーム24の姿勢を示している。また、アーム24の実線は回転角度が初期角度にあるときを示しており、ガイドレール21に対する角度がαであることを示す。β、γも同様にガイドレール21に対する角度を示す。サンプリングノズル20が位置決めピンAを検出しているアーム24Aの状態から位置決めピンBを検出するアーム24Bの状態にアームをX移動させたときのパルス数を距離で割ることで、アーム24が駆動信号である1パルスあたりに進むX方向の距離、すなわち直線移動係数Lを算出する。アーム24Aの状態は(XA,TA)、アーム24Bの状態は(XB,TB)で表され、TA=TBであるので、直線移動係数Lは次式により求めることができる。
【0096】
L=d/(XB−XA) …(1)
【0097】
位置決めピンC,Dに対して同様の測定を行い、平均値を算出して直線移動係数Lを求めてもよい。ガイドレール21と位置決めピンA,Bを結ぶ直線は平行であることが望ましいが、試薬ラック12がガイドレール21に対して平行ではない場合、位置決めピンAからBに位置合わせするときアームを回転させる必要がある。この場合、試薬容器11の各位置は試薬ラック12をθ回転(行列計算)させた位置にあるとして、サンプリングノズル20のキャリブレーションを行う。
【0098】
(2)ステップ2
位置決めピンBと位置決めピンDに対して、アームを24Bと24B’、及び24Dと24D’のように2方向から位置合わせすることで、駆動信号である1パルスあたりのアーム回転角度、すなわち回転移動係数Tと、アーム24の回転半径rを算出する。位置決めピンBとDの2点を2方向から位置決めすることで、2元連立方程式を導いて算出する。ここで、アーム24の回転半径rとは、正確には回転軸23に対するサンプリングノズル20の先端位置までの距離のことであるが、便宜上、アームの回転半径rという。
【0099】
例えば、位置決めピンBに対して2方向から位置決めした場合、回転半径rは変わらないため、破線で示した三角形は二等辺三角形を形成する。頂角は回転に要したアームのパルス数に相当する。二等辺三角形の底辺の長さは、直線移動ユニット22が1パルスあたりにX方向に進む距離である直線移動係数Lが既知のため、算出することができる。回転移動係数Tがわかると、アームの回転半径rも算出できる。
【0100】
位置決めピンBに対してアームを右側から位置決めしたアーム24Bの状態(XB,TB)と、左側から位置決めしたアーム24B’の状態(XB’,TB’)から次式(2)(3)が成り立つ。但し、θB’=θBとした。
【0101】
2θB=(TB’− TB)×T−π …(2)
L×(XB’− XB)=2rcosθB …(3)
【0102】
同様の操作を位置決めピンDに対して行う。すなわち、位置決めピンDに対してアームを右側から位置決めしたアーム24Dの状態(XD,TD)と、左側から位置決めしたアーム24D’の状態(XD’,TD’)から次式(4)(5)が得られる。
【0103】
2θD=(TD’− TD)×T−π …(4)
L×(XD’− XD)=2rcosθD …(5)
【0104】
式(2)のθBを(3)に代入することでTとrの関係式が得られ、同様に式(4)のθDを(5)に代入することで、別のTとrの関係式が得られる。これより、1パルスあたりのアーム回転角度である回転移動係数Tとアーム24の回転半径rを求めることができる。
【0105】
なお、ここでは2個の位置決めピンに対する位置決めによってTとrを求めたが、3個以上の位置決めピンに対して同様の操作を行い、Tとrについて複数の値の平均値を求め、それを回転移動係数及びアームの回転半径としてもよい。
【0106】
(3)ステップ3
位置決めピンA(角度β)から位置決めピンC(角度γ)へ位置決めするためにアームを回転させるのに要したパルス数と、既知の距離Δy及び上記で求めたアームの回転半径rを用いて、次式(6)の関係から角度βを算出する。
【0107】
rsinγ−rsinβ=Δy …(6)
式(6)において、角度γへは、角度βの状態からパルス数(TC−TA)分アームを回転させることで位置づけられる。すなわち、式(6)は未知数としてβだけを含む式に変形可能であり、それから角度βを求めることができる。角度βが分かれば、式(6)から角度γも求まる。角度の値が必要なのは、アームを同じパルス数回転させても、アームの初期位置(角度α)によってサンプリングノズルがY方向へ進む距離が異なるためで、キャリブレーションを行う際には求める必要がある。
【0108】
(4)ステップ4
アームの初期位置に対する試薬容器11、予混同容器14、開口カバー16、注入ポート32、洗浄槽68の位置を算出して、算出した上述のパラメータからサンプリングノズル20の位置決めを行う。
【0109】
(5)ステップ5
Z方向に関しては、試薬ラック12が金属製の場合、試薬容器を除いた試薬ラック底面へ液面検知を行うことで底面までの高さを把握できる。例えばその位置から試薬容器底面までの距離を引いた位置をZの降下位置としてキャリブレーションできる。試薬ラック12に対するガイドレール21の傾きを算出できる。
【0110】
ステップ1〜4に説明した位置決めの方法は、液面検知で位置決めピンの位置を特定する上記実施例の方法に限定されるものではない。ピンの位置を特定する別の方法(センサで検知するなど)があれば、同様の方法論で位置決め可能である。
【0111】
ノズルを交換した場合や曲げた場合は、アーム24の回転半径のみが変わるだけである。X,θの1パルスあたりの分解能は変わらないため、例えば位置決めピン18iを2方向から位置決めするだけでキャリブレーションを行うことができる。キャリブレーションのログを取ることで、算出したパラメータの誤差を検証することができる。
【0112】
なお、制御・演算部50は、算出したパラメータが想定したパラメータ範囲(機械公差、液面検知誤差などから推定可能)を外れたことを検知した場合、装置の異常状態と判定して装置の運転、具体的にはサンプリングノズルの駆動を中止し、異常を報知するように構成することも可能である。異常の報知は警報音、異常灯の点灯、あるいは表示部52への異常表示など適宜の手段で行うことができる。
【0113】
制御・演算部50が異常状態と判定するのは、次のような場合である。
(a)計算した試薬容器の位置(X,T)が、アームが動ける範囲のX,Tを超えていて実際にはアクセスできない。またはX,Tの解が無い場合。
(b)計算したアームの回転半径rがある値より小さい、あるいは大きい場合。この場合には、サンプリングノズルが曲がっていることが想定され、サンプリングノズルが試薬容器側面にぶつかることがある。
(c)液面検知で位置決めピンA,BのZから算出した試薬ラックに対するアーム(X方向)の傾きが大きい場合。この場合には、サンプリングノズルが試薬容器側面にぶつかることがある。
(d)液面検知で位置決めピンA,Cを2方向からアクセスした場合のZから算出した試薬ラックに対するノズル先端の回転面の傾きが大きい場合。この場合には、サンプリングノズルが試薬容器側面にぶつかることがある。
(e)液面検知で位置決めピンA,B,C,DのZから算出した試薬ラック面の傾きが大きい場合。この場合には、サンプリングノズルが試薬容器側面にぶつかることがある。
【0114】
また、装置の出荷時検査で上記(a)〜(e)の異常が発生しない場合でも、サンプリングノズルを交換した場合に上記(a)〜(e)の異常が発生する場合が想定される。これは、サンプリングノズルには曲げ角度などの公差があるために、サンプリングノズルを交換するたびにアームの回転半径rが変化するためである。従って、出荷時検査で上記(a)〜(e)の検査に加えて、サンプリングノズル回転半径rの最大値と最小値を代入した計算を行うことで、サンプリングノズル交換時に上記(a)〜(e)の異常が発生するリスクを回避できる。そのための対策としてサンプリングノズルを交換すること、アームや試薬ラックの据付位置や角度を再調整することが挙げられる。
【0115】
次に、一例として、分析すべき試料DNA断片を1分子ずつ捕捉し、1塩基ずつ伸長させて、取り込まれた蛍光標識を1分子ごと検出して塩基配列を決定する方法について説明する。具体的には、DNAポリメラーゼの基質として鋳型DNAに取り込まれてDNA鎖伸長反応を保護基の存在により停止することができかつ検出され得る標識を持つ4種のdNTPの誘導体を用いてDNAポリメラーゼ反応を行わせる工程、次いで取り込まれたdNTP誘導体を蛍光等で検出する工程、及びdNTP誘導体を伸長可能な状態に戻す工程を1サイクルとし、それを繰り返すことにより試料DNAの塩基配列を決定する。この時、フローセルへの試薬注入、洗浄等の各送液処理工程を、上記(1)〜(6)に説明した本実施例の工程を組み合わせることにより行う。
【0116】
試料DNA断片は、ビオチン化DNAをストレプトアビジン化ビーズに固定し、ビーズをフローセル内にばら撒くことで、フローセル内にランダムに配置した。ビーズの大きさは2000nm以下であり、より好ましくは10〜1000nmである。
【0117】
dNTPの蛍光標識としては、種々の蛍光体を使うことができる。たとえば、Bodipy−FL−510,R6G,ROX,Bodipy−650を使用し、これらそれぞれ異なる4種の蛍光体で標識された3′末端がアリル基で修飾された4種のdNTPを使用する。このとき、検出ユニットは、光源として、Arレーザ(488nm)、He−Neレーザ(594.1nm)、及びYAGレーザ(355nm)を備えるのが好ましい。ArレーザはBodipy−FL−510,R6G励起用、He−NeレーザはROX,Bodipy−650励起用である。また、YAGレーザは、取り込まれたdNTP誘導体の蛍光検出後、dNTP誘導体を伸長可能な状態に戻すために使用する。
【0118】
段階的伸長反応の工程例を以下に示す。ビオチン修飾したターゲットである一本鎖鋳型DNAにプライマをハイブリさせる。次に、それぞれ異なる4種の蛍光体で標識された3′末端がアリル基で修飾された4種のdNTP(3′−O−allyl−dGTP−PC−Bodipy−FL−510,3′−O−allyl−dTTP−PC−R6G,3′−O−allyl−dATP−PC−ROX,3′−O−allyl−dCTP−PC−Bodipy−650)及びThermo Sequenaseポリメラーゼを加えたThermo Sequenase Reactionバッファを注入ポートよりフローセルへ導入し、伸長反応を行う。鋳型DNA−プライマ複合体に取込まれたdNTPは、3′末端はアリル基で修飾されているため、鋳型DNA−プライマ複合体に1塩基より多く取込まれることはない。伸長反応後、未反応の各種dNTP及びポリメラーゼを洗浄用バッファで洗い流し、Arレーザ,He−Neレーザのそれぞれから発振するレーザ光を同時にフローセルに照射する。レーザ光照射により鋳型DNA−プライマ複合体に取込まれたdNTPに標識された蛍光体を励起し、そこから発する蛍光を検出ユニットの撮像装置によって検出する。鋳型DNA−プライマ複合体に取込まれたdNTPに標識された蛍光体の蛍光波長を特定することにより、取り込まれたdNTPの塩基種を特定できる。次に、YAGレーザより発振するレーザ光をフローセルに照射し、複合体に取込まれたdNTPに標識された蛍光体を光切断により取り除く。次に、パラジウムを含んだ溶液を流路内に導入し、パラジウム触媒反応により、複合体に取込まれたdNTPの3′末端のアリル基を水酸基に変える。3′末端のアリル基を水酸基に変えることにより、鋳型DNA−プライマ複合体の伸長反応が再開可能となる。この触媒反応後に、洗浄用バッファにてチャンバを洗浄する。これを繰返すことにより、固定された一本鎖鋳型DNAの配列を決定する。
【0119】
以上、本発明をDNAシーケンサに適用した実施例について説明した。しかし、本発明の適用はDNAシーケンサだけに限られるものではなく、小分子、タンパク質、抗原抗体、ホルモン、細菌などの生体分子相互作用解析など、フローセルに試薬を順次注入して分析を行う分析装置一般に適用可能である。
【0120】
なお、本発明は上記した実施例に限定されるものではなく、様々な変形例が含まれる。例えば、上記した実施例は本発明を分かりやすく説明するために詳細に説明したものであり、必ずしも説明した全ての構成を備えるものに限定されるものではない。また、ある実施例の構成の一部を他の実施例の構成に置き換えることが可能であり、また、ある実施例の構成に他の実施例の構成を加えることも可能である。また、各実施例の構成の一部について、他の構成の追加・削除・置換をすることが可能である。
【0121】
また、上記の各構成、機能、処理部、処理手段等は、それらの一部や全部を、例えば集積回路で設計する等によりハードウェアで実現してもよい。また、上記の各構成、機能等は、プロセッサがそれぞれの機能を実現するプログラムを解釈し、実行することによりソフトウェアで実現してもよい。各機能を実現するプログラム、テーブル、ファイル等の情報は、メモリやハードディスク、SSD(Solid State Drive)等の記録装置、または、ICカード、SDカード、DVD等の記録媒体に置くことができる。
【符号の説明】
【0122】
11 試薬容器
12 試薬ラック
13 試薬ラック台
14 予混合容器
15 カバー
16 開口
17 モータ
18 位置決めピン
20 サンプリングノズル
21 ガイドレール
22 直線移動ユニット
23 回転軸
24 アーム
30 フローセル
31 フローセルステージ
32 注入ポート
33 排出ポート
34 流路
35 サンプル固定層
36 上部基板
37 下部基板
38 スペーサ
40 検出ユニット
41 光源
42 撮像装置
50 制御・演算部
51 入力部
52 表示部
53 液面検知部
60 マイクロシリンジ
61 プランジャ
62 第1流路
63 第2流路
64 洗浄液タンク
65 ポンプ
66 洗浄液循環流路
67 流量調節絞り
68 洗浄槽
69 廃液タンク
71 第1電磁弁
72 第2電磁弁
81 第1洗浄液シリンジ
84 第2洗浄液シリンジ
【特許請求の範囲】
【請求項1】
複数の試薬容器を保持する試薬ラックを設置する試薬ラック設置部と、
内部流路と当該内部流路に接続した注入ポート及び排出ポートを備えるフローセルを設置するフローセル設置部と、
サンプリングノズルと、
前記サンプリングノズルが液面に接触したことを検知する液面検知部と、
洗浄槽と、
前記サンプリングノズルを前記試薬容器、前記洗浄槽及び前記フローセルの注入ポートの間に駆動するノズル駆動機構と、
前記フローセル内の試料に生じた変化を検出する検出部と、
洗浄液を収容した洗浄液タンクと、前記サンプリングノズルに接続され前記サンプリングノズルの先端から液体の吸引・吐出を行うためのマイクロシリンジと、前記洗浄液タンクから前記マイクロシリンジに洗浄液を送出するための第1機構と、前記洗浄液タンクから前記洗浄槽に洗浄液を送出するための第2機構とを有する送液システムと、
装置各部を制御する制御部とを有し、
前記制御部は、前記液面検知部によって前記試薬容器中の試薬表面を検知してから前記サンプリングノズルを試薬中に所定距離だけ侵入させた状態で前記マイクロシリンジを制御することにより、前記サンプリングノズルに充填された洗浄液の先に前記試薬容器から所要量の試薬を吸引し、前記サンプリングノズルを前記フローセルの前記注入ポートに挿入した状態で前記マイクロシリンジを制御することにより、前記吸引した試薬を前記注入ポートから前記フローセルに注入し、また、前記サンプリングノズルを前記洗浄槽に位置決めした状態で前記第1機構及び/又は前記第2機構を作動させることにより前記サンプリングノズルの内側及び/又は外側の洗浄を行う
ことを特徴とする分析装置。
【請求項2】
請求項1記載の分析装置において、前記サンプリングノズルが接触したことを前記液面検知部を用いて検出できる部材を、前記ノズル駆動機構による前記サンプリングノズルの駆動校正用の部材として複数個備えることを特徴とする分析装置。
【請求項3】
請求項2記載の分析装置において、
前記ノズル駆動機構は、ガイドレールと、前記ガイドレールに沿って直線移動する移動ユニットと、前記サンプリングノズルが固定され前記移動ユニットに設定された回転軸の回りに回動するアームとを有し、
前記部材は、前記ガイドレールに沿った方向に既知の間隔で少なくとも2個が配置され、前記ガイドレールに垂直な方向に既知の間隔で少なくとも2個が配置されていることを特徴とする分析装置。
【請求項4】
請求項3記載の分析装置において、前記制御部は、前記液面検知部を用いて前記部材の位置を検知することで前記サンプリングノズル位置のキャリブレーションを行う機能を有し、前記制御部は、前記サンプリングノズルを前記ガイドレールに沿った方向に配置された少なくとも2個の部材の位置を検知し、そのときの前記ノズル駆動機構への駆動信号と当該2つの部材間の間隔を元に前記直線移動方向への移動距離と駆動信号との比である直線移動係数を求め、また、少なくとも2個の部材に対してそれぞれ2方向から位置を検知し、そのときの前記ノズル駆動機構への駆動信号と前記直線移動係数とを元に、前記回転軸を中心としたサンプリングノズル先端の回転半径、及び回転角度と駆動信号との比である回転移動係数を求め、更に、前記ガイドレールに対して垂直な方向に既知の間隔で配置された2つの部材を検知し、そのときの前記ノズル駆動機構への駆動信号と前記直線移動係数と前記回転移動係数とを元に当該部材を検知しているときの前記アームの回転角度を求めることを特徴とする分析装置。
【請求項5】
請求項4記載の分析装置において、求めたサンプリングノズル先端の回転半径が予め定められた許容範囲を外れていた場合、前記制御部は、前記ノズル駆動機構による前記サンプリングノズルの駆動を中止し、異常を報知することを特徴とする分析装置。
【請求項6】
請求項1記載の分析装置において、前記内部流路に一本鎖鋳型DNAが固定されたフローセルを用い、DNAシーケンサとして機能することを特徴とする分析装置。
【請求項7】
請求項1記載の分析装置において、
前記ノズル駆動機構は、ガイドレールと、前記ガイドレールに沿って直線移動する移動ユニットと、前記サンプリングノズルが固定され前記移動ユニットに設定された回転軸の回りに回動するアームとを有し、
前記アームは、前記サンプリングノズルが前記フローセルのテーパ状の注入ポートへ挿入されるとき、アーム自体も撓むように剛性を小さくすることで、前記ノズル駆動機構による前記サンプリングノズルの位置決め誤差を吸収することを特徴とする分析装置。
【請求項8】
請求項1記載の分析装置において、前記サンプリングノズルを前記注入ポートに挿入して前記フローセルに試薬を注入するとき、前記制御部は、前記送液システムによる試薬注入動作終了後、予め決められた時間だけ待った後、前記ノズル駆動機構を制御して前記サンプリングノズルを前記注入ポートから離脱させることを特徴とする分析装置。
【請求項9】
請求項1記載の分析装置において、前記試薬容器から前記サンプリングノズルに吸引する試薬の量は、前記フローセルの容積以上、かつ前記フローセルの容積に10μLを加えた量以下であることを特徴とする分析装置。
【請求項10】
請求項1記載の分析装置において、前記送液システムは、前記洗浄液タンク内の洗浄液がポンプによって吸い上げられて再び前記洗浄液タンクに戻される洗浄液循環流路を有し、前記第1機構は、前記洗浄液循環流路と前記マイクロシリンジを接続する流路中に設けられた第1の電磁弁を有し、前記第2機構は、前記洗浄液循環流路と前記洗浄槽を接続する流路中に設けられた第2の電磁弁を有することを特徴とする分析装置。
【請求項11】
先端まで洗浄液が満たされたサンプリングノズルを試薬が入った試薬容器の上方に移動させる工程と、
前記サンプリングノズルを降下させる工程と、
液面検知手段によって前記試薬容器中の試薬表面を検知してから所定距離だけ試薬中に侵入させて前記サンプリングノズルの降下を停止させる工程と、
前記サンプリングノズルに所要量の試薬を吸引する工程と、
前記サンプリングノズルを洗浄槽に移動させる工程と、
前記洗浄槽内で前記サンプリングノズル表面に洗浄液を噴霧し、前記サンプリングノズルの外側に付着した試薬を洗浄除去する工程と、
前記サンプリングノズルをフローセルの注入ポートの上方に移動する工程と、
前記サンプリングノズルを降下させ、先端を前記注入ポートに挿入する工程と、
前記サンプリングノズルに吸引した前記試薬を前記フローセルに圧入する工程と、
前記圧入動作終了後、予め決められた時間の間、前記サンプリングノズルを前記注入ポートに挿入した状態を維持する工程と、
その後、前記サンプリングノズルを前記注入ポートから離脱させて上昇させる工程と、
前記サンプリングノズルを前記洗浄槽に移動させる工程と、
前記洗浄槽内で前記サンプリングノズルから洗浄液を吐出して前記サンプリングノズルの内側を洗浄すると共に、前記サンプリングノズルの外側に洗浄液を噴霧して洗浄する工程と、
前記サンプリングノズルをフローセルの注入ポートの上方に移動する工程と、
前記サンプリングノズルを降下させ、先端を前記注入ポートに挿入する工程と、
前記サンプリングノズルから洗浄液を前記フローセルに注入し、未反応の試薬を洗い流す工程と、
フローセルを撮像し、前記試薬注入による変化を検出する検出工程と、
を有することを特徴とする分析方法。
【請求項12】
請求項11記載の分析方法において、前記所要量は、前記フローセルの容積以上、かつ前記フローセルの容積に10μLを加えた量以下であることを特徴とする分析方法。
【請求項13】
請求項11記載の分析方法において、前記未反応の試薬を洗い流す工程の前に、
前記サンプリングノズルを前記フローセルの注入ポートに挿入し、前記フローセル内の前記試薬を吸引する工程と、
前記サンプリングノズルを回収試薬用容器の上方に移動させる工程と、
吸引した試薬を前記回収試薬用容器に吐出する工程と、
を有することを特徴とする分析方法。
【請求項14】
請求項11記載の分析方法において、
前記サンプリングノズルは一方向に沿った直線移動、前記直線移動の方向に垂直な回転軸の回りへの回転移動、前記回転軸の方向に沿った上下移動との組み合わせによって所望の位置に移動制御され、
前記液面検知手段を用いて既知の位置関係に配置された複数の導電性位置決めピンの位置を検知することで、サンプリングノズル位置のキャリブレーションを行う工程を有することを特徴とする分析方法。
【請求項15】
請求項14記載の分析方法において、前記サンプリングノズル位置のキャリブレーションを行う工程は、
前記サンプリングノズルを前記直線移動方向に配置された複数の位置決めピンの位置を検知することで前記直線移動方向への移動係数を求める工程と、
少なくとも2個の位置決めピンに対して、それぞれ2方向から位置を検知することにより前記回転軸を中心としたサンプリングノズル先端の回転半径と回転移動係数とを求める工程と、
前記直線移動方向に対して垂直な方向の間隔が既知の2つの位置決めピンの位置を検知することにより、当該位置決めピンを検知しているときの前記回転移動の角度を求める工程と、
を含むことを特徴とする分析方法。
【請求項16】
請求項15記載の分析方法において、求めた前記サンプリングノズル先端の回転半径が許容範囲を外れていたとき、前記サンプリングノズルの移動を中止し異常を報知することを特徴とする分析方法。
【請求項1】
複数の試薬容器を保持する試薬ラックを設置する試薬ラック設置部と、
内部流路と当該内部流路に接続した注入ポート及び排出ポートを備えるフローセルを設置するフローセル設置部と、
サンプリングノズルと、
前記サンプリングノズルが液面に接触したことを検知する液面検知部と、
洗浄槽と、
前記サンプリングノズルを前記試薬容器、前記洗浄槽及び前記フローセルの注入ポートの間に駆動するノズル駆動機構と、
前記フローセル内の試料に生じた変化を検出する検出部と、
洗浄液を収容した洗浄液タンクと、前記サンプリングノズルに接続され前記サンプリングノズルの先端から液体の吸引・吐出を行うためのマイクロシリンジと、前記洗浄液タンクから前記マイクロシリンジに洗浄液を送出するための第1機構と、前記洗浄液タンクから前記洗浄槽に洗浄液を送出するための第2機構とを有する送液システムと、
装置各部を制御する制御部とを有し、
前記制御部は、前記液面検知部によって前記試薬容器中の試薬表面を検知してから前記サンプリングノズルを試薬中に所定距離だけ侵入させた状態で前記マイクロシリンジを制御することにより、前記サンプリングノズルに充填された洗浄液の先に前記試薬容器から所要量の試薬を吸引し、前記サンプリングノズルを前記フローセルの前記注入ポートに挿入した状態で前記マイクロシリンジを制御することにより、前記吸引した試薬を前記注入ポートから前記フローセルに注入し、また、前記サンプリングノズルを前記洗浄槽に位置決めした状態で前記第1機構及び/又は前記第2機構を作動させることにより前記サンプリングノズルの内側及び/又は外側の洗浄を行う
ことを特徴とする分析装置。
【請求項2】
請求項1記載の分析装置において、前記サンプリングノズルが接触したことを前記液面検知部を用いて検出できる部材を、前記ノズル駆動機構による前記サンプリングノズルの駆動校正用の部材として複数個備えることを特徴とする分析装置。
【請求項3】
請求項2記載の分析装置において、
前記ノズル駆動機構は、ガイドレールと、前記ガイドレールに沿って直線移動する移動ユニットと、前記サンプリングノズルが固定され前記移動ユニットに設定された回転軸の回りに回動するアームとを有し、
前記部材は、前記ガイドレールに沿った方向に既知の間隔で少なくとも2個が配置され、前記ガイドレールに垂直な方向に既知の間隔で少なくとも2個が配置されていることを特徴とする分析装置。
【請求項4】
請求項3記載の分析装置において、前記制御部は、前記液面検知部を用いて前記部材の位置を検知することで前記サンプリングノズル位置のキャリブレーションを行う機能を有し、前記制御部は、前記サンプリングノズルを前記ガイドレールに沿った方向に配置された少なくとも2個の部材の位置を検知し、そのときの前記ノズル駆動機構への駆動信号と当該2つの部材間の間隔を元に前記直線移動方向への移動距離と駆動信号との比である直線移動係数を求め、また、少なくとも2個の部材に対してそれぞれ2方向から位置を検知し、そのときの前記ノズル駆動機構への駆動信号と前記直線移動係数とを元に、前記回転軸を中心としたサンプリングノズル先端の回転半径、及び回転角度と駆動信号との比である回転移動係数を求め、更に、前記ガイドレールに対して垂直な方向に既知の間隔で配置された2つの部材を検知し、そのときの前記ノズル駆動機構への駆動信号と前記直線移動係数と前記回転移動係数とを元に当該部材を検知しているときの前記アームの回転角度を求めることを特徴とする分析装置。
【請求項5】
請求項4記載の分析装置において、求めたサンプリングノズル先端の回転半径が予め定められた許容範囲を外れていた場合、前記制御部は、前記ノズル駆動機構による前記サンプリングノズルの駆動を中止し、異常を報知することを特徴とする分析装置。
【請求項6】
請求項1記載の分析装置において、前記内部流路に一本鎖鋳型DNAが固定されたフローセルを用い、DNAシーケンサとして機能することを特徴とする分析装置。
【請求項7】
請求項1記載の分析装置において、
前記ノズル駆動機構は、ガイドレールと、前記ガイドレールに沿って直線移動する移動ユニットと、前記サンプリングノズルが固定され前記移動ユニットに設定された回転軸の回りに回動するアームとを有し、
前記アームは、前記サンプリングノズルが前記フローセルのテーパ状の注入ポートへ挿入されるとき、アーム自体も撓むように剛性を小さくすることで、前記ノズル駆動機構による前記サンプリングノズルの位置決め誤差を吸収することを特徴とする分析装置。
【請求項8】
請求項1記載の分析装置において、前記サンプリングノズルを前記注入ポートに挿入して前記フローセルに試薬を注入するとき、前記制御部は、前記送液システムによる試薬注入動作終了後、予め決められた時間だけ待った後、前記ノズル駆動機構を制御して前記サンプリングノズルを前記注入ポートから離脱させることを特徴とする分析装置。
【請求項9】
請求項1記載の分析装置において、前記試薬容器から前記サンプリングノズルに吸引する試薬の量は、前記フローセルの容積以上、かつ前記フローセルの容積に10μLを加えた量以下であることを特徴とする分析装置。
【請求項10】
請求項1記載の分析装置において、前記送液システムは、前記洗浄液タンク内の洗浄液がポンプによって吸い上げられて再び前記洗浄液タンクに戻される洗浄液循環流路を有し、前記第1機構は、前記洗浄液循環流路と前記マイクロシリンジを接続する流路中に設けられた第1の電磁弁を有し、前記第2機構は、前記洗浄液循環流路と前記洗浄槽を接続する流路中に設けられた第2の電磁弁を有することを特徴とする分析装置。
【請求項11】
先端まで洗浄液が満たされたサンプリングノズルを試薬が入った試薬容器の上方に移動させる工程と、
前記サンプリングノズルを降下させる工程と、
液面検知手段によって前記試薬容器中の試薬表面を検知してから所定距離だけ試薬中に侵入させて前記サンプリングノズルの降下を停止させる工程と、
前記サンプリングノズルに所要量の試薬を吸引する工程と、
前記サンプリングノズルを洗浄槽に移動させる工程と、
前記洗浄槽内で前記サンプリングノズル表面に洗浄液を噴霧し、前記サンプリングノズルの外側に付着した試薬を洗浄除去する工程と、
前記サンプリングノズルをフローセルの注入ポートの上方に移動する工程と、
前記サンプリングノズルを降下させ、先端を前記注入ポートに挿入する工程と、
前記サンプリングノズルに吸引した前記試薬を前記フローセルに圧入する工程と、
前記圧入動作終了後、予め決められた時間の間、前記サンプリングノズルを前記注入ポートに挿入した状態を維持する工程と、
その後、前記サンプリングノズルを前記注入ポートから離脱させて上昇させる工程と、
前記サンプリングノズルを前記洗浄槽に移動させる工程と、
前記洗浄槽内で前記サンプリングノズルから洗浄液を吐出して前記サンプリングノズルの内側を洗浄すると共に、前記サンプリングノズルの外側に洗浄液を噴霧して洗浄する工程と、
前記サンプリングノズルをフローセルの注入ポートの上方に移動する工程と、
前記サンプリングノズルを降下させ、先端を前記注入ポートに挿入する工程と、
前記サンプリングノズルから洗浄液を前記フローセルに注入し、未反応の試薬を洗い流す工程と、
フローセルを撮像し、前記試薬注入による変化を検出する検出工程と、
を有することを特徴とする分析方法。
【請求項12】
請求項11記載の分析方法において、前記所要量は、前記フローセルの容積以上、かつ前記フローセルの容積に10μLを加えた量以下であることを特徴とする分析方法。
【請求項13】
請求項11記載の分析方法において、前記未反応の試薬を洗い流す工程の前に、
前記サンプリングノズルを前記フローセルの注入ポートに挿入し、前記フローセル内の前記試薬を吸引する工程と、
前記サンプリングノズルを回収試薬用容器の上方に移動させる工程と、
吸引した試薬を前記回収試薬用容器に吐出する工程と、
を有することを特徴とする分析方法。
【請求項14】
請求項11記載の分析方法において、
前記サンプリングノズルは一方向に沿った直線移動、前記直線移動の方向に垂直な回転軸の回りへの回転移動、前記回転軸の方向に沿った上下移動との組み合わせによって所望の位置に移動制御され、
前記液面検知手段を用いて既知の位置関係に配置された複数の導電性位置決めピンの位置を検知することで、サンプリングノズル位置のキャリブレーションを行う工程を有することを特徴とする分析方法。
【請求項15】
請求項14記載の分析方法において、前記サンプリングノズル位置のキャリブレーションを行う工程は、
前記サンプリングノズルを前記直線移動方向に配置された複数の位置決めピンの位置を検知することで前記直線移動方向への移動係数を求める工程と、
少なくとも2個の位置決めピンに対して、それぞれ2方向から位置を検知することにより前記回転軸を中心としたサンプリングノズル先端の回転半径と回転移動係数とを求める工程と、
前記直線移動方向に対して垂直な方向の間隔が既知の2つの位置決めピンの位置を検知することにより、当該位置決めピンを検知しているときの前記回転移動の角度を求める工程と、
を含むことを特徴とする分析方法。
【請求項16】
請求項15記載の分析方法において、求めた前記サンプリングノズル先端の回転半径が許容範囲を外れていたとき、前記サンプリングノズルの移動を中止し異常を報知することを特徴とする分析方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】

【図11】

【図12】
【図13】
【図14】
【図15】
【図16】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2012−173059(P2012−173059A)
【公開日】平成24年9月10日(2012.9.10)
【国際特許分類】
【出願番号】特願2011−33730(P2011−33730)
【出願日】平成23年2月18日(2011.2.18)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
【公開日】平成24年9月10日(2012.9.10)
【国際特許分類】
【出願日】平成23年2月18日(2011.2.18)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
[ Back to top ]