
分注装置、自動分析装置及び分注装置のメンテナンス方法
【課題】駆動モータ停止時における振動の振幅の増大を抑えることが可能な分注装置、自動分析装置及び分注装置のメンテナンス方法を提供すること。
【解決手段】回動モータ34の回転がタイミングベルト36によって伝達される支柱21を中心として回動すると共に、支柱方向に昇降する分注アーム20aを備え、試薬又は検体を含む液体試料を分注する検体分注装置20、自動分析装置及び分注装置のメンテナンス方法。検体分注装置20は、駆動モータ34停止時の支柱21又は駆動モータの回転軸の回転方向の振動を検知するロータリエンコーダ38と、駆動モータの駆動速度を制御する制御部15とを備え、制御部は、ロータリエンコーダが検知した振動の振幅が所定の閾値を超えた場合に駆動モータの駆動速度を減速制御する。
【解決手段】回動モータ34の回転がタイミングベルト36によって伝達される支柱21を中心として回動すると共に、支柱方向に昇降する分注アーム20aを備え、試薬又は検体を含む液体試料を分注する検体分注装置20、自動分析装置及び分注装置のメンテナンス方法。検体分注装置20は、駆動モータ34停止時の支柱21又は駆動モータの回転軸の回転方向の振動を検知するロータリエンコーダ38と、駆動モータの駆動速度を制御する制御部15とを備え、制御部は、ロータリエンコーダが検知した振動の振幅が所定の閾値を超えた場合に駆動モータの駆動速度を減速制御する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、分注装置、自動分析装置及び分注装置のメンテナンス方法に関するものである。
【背景技術】
【0002】
従来、分注装置は、駆動モータの回転をタイミングベルトによって伝達して被従動部を駆動するものがある(例えば、特許文献1参照)。
【0003】
【特許文献1】特開2005−181045号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
ところで、駆動モータの回転をタイミングベルトによって分注アームを有する支柱へ伝達する分注装置は、駆動モータ停止時に駆動モータと支柱との間の駆動力の伝達タイミングのずれから支柱が回転方向に振動する。このとき、分注装置は、タイミングベルトが弛んでいたり、駆動モータの回転速度が速過ぎたりすると、支柱の回転方向における振動の振幅が大きくなることがある。駆動モータ停止時に支柱の振動の振幅が大きくなると、分注装置は、分注アーム、従って分注プローブ内に吸引した試薬や検体等の液体試料の揺れが増大し、分注精度が低下してしまうという問題があった。
【0005】
本発明は、上記に鑑みてなされたものであって、駆動モータ停止時における振動の振幅の増大を抑えることが可能な分注装置、自動分析装置及び分注装置のメンテナンス方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
上述した課題を解決し、目的を達成するために、本発明の分注装置は、駆動モータの回転がタイミングベルトによって伝達される従動軸を中心として回動すると共に、前記従動軸に方向に昇降する分注アームを備え、試薬又は検体を含む液体試料を分注する分注装置において、前記駆動モータ停止時の前記従動軸又は前記駆動モータの回転軸の回転方向の振動を検知する振動検知手段と、前記駆動モータの駆動速度を制御する制御手段と、を備え、前記制御手段は、前記振動検知手段が検知した振動の振幅が所定の閾値を超えた場合に前記駆動モータの駆動速度を減速制御することを特徴とする。
【0007】
また、本発明の分注装置は、上記の発明において、前記振動検知手段が検知した振動の振幅が所定の閾値を超えた場合、前記駆動モータの駆動速度を減速制御する旨、又は当該分注装置のメンテナンスをすべき旨の警報を告知する告知手段を備えることを特徴とする。
【0008】
また、本発明の分注装置は、上記の発明において、前記振動検知手段は、前記駆動モータの回転軸又は前記従動軸に設けられるロータリエンコーダであることを特徴とする。
【0009】
また、上述した課題を解決し、目的を達成するために、本発明の自動分析装置は、駆動モータの回転をタイミングベルトによって伝達される従動軸を中心として回動すると共に、前記従動軸に沿って昇降する分注アームを備え、試薬又は検体を含む液体試料を分注する分注装置を用いて分注される検体と試薬とを反応させ、反応液の光学的特性を測定して前記検体を分析する自動分析装置であって、前記分注装置は、前記駆動モータ停止時の前記従動軸又は前記駆動モータの回転軸の振動を検知する振動検知手段と、前記駆動モータの駆動速度を制御する制御手段とを備え、前記制御手段は、前記振動検知手段が検知した振動の振幅が所定の閾値を超えた場合に前記駆動モータの駆動速度を減速制御することを特徴とする。
【0010】
また、本発明の自動分析装置は、上記の発明において、前記分注装置は、前記振動検知手段が検知した振動が所定の閾値を超えた場合に、前記駆動モータの駆動速度を減速制御する旨、又は当該分注装置のメンテナンスをすべき旨の警報を告知する告知手段を備えることを特徴とする。
【0011】
また、本発明の自動分析装置は、上記の発明において、前記振動検知手段は、駆動モータの回転軸又は前記従動軸に設けられるロータリエンコーダであることを特徴とする。
【0012】
また、上述した課題を解決し、目的を達成するために、本発明の分注装置のメンテナンス方法は、駆動モータの回転をタイミングベルトによって伝達される従動軸を中心として回動すると共に、前記従動軸に沿って昇降する分注アームを備え、試薬又は検体を含む液体試料を分注する分注装置であって、前記駆動モータ停止時の前記従動軸又は前記駆動モータの回転軸の回転方向の振動を検知する振動検知工程と、前記駆動モータの駆動速度を制御する制御工程と、を含み、前記制御工程は、前記振動検知工程で検知した振動の振幅が所定の閾値を超えた場合に前記駆動モータの駆動速度を減速制御することを特徴とする。
【0013】
また、本発明の分注装置のメンテナンス方法は、上記の発明において、前記振動検知工程で検知した振動が所定の閾値を超えた場合に、前記駆動モータの駆動速度を減速制御する旨、又は当該分注装置のメンテナンスをすべき旨の警報を告知する告知工程を含むことを特徴とする。
【0014】
また、本発明の分注装置のメンテナンス方法は、上記の発明において、前記振動検知工程は、前記従動軸又は前記駆動モータの回転軸の回転方向の振動を駆動モータの回転軸又は前記従動軸に設けるロータリエンコーダによって検知することを特徴とする。
【発明の効果】
【0015】
本発明によれば、振動検知手段が検知した振動の振幅が所定の閾値を超えた場合に駆動モータの駆動速度を制御手段によって減速制御するので、駆動モータ停止時における振動の振幅の増大を抑えることができるという効果を奏する。
【発明を実施するための最良の形態】
【0016】
以下、本発明の分注装置、自動分析装置及び分注装置のメンテナンス方法にかかる実施の形態について、図面を参照して詳細に説明する。図1は、本発明の自動分析装置の概略構成図である。図2は、本発明の分注装置として図1の自動分析装置で使用する検体分注装置を示す概略構成図である。
【0017】
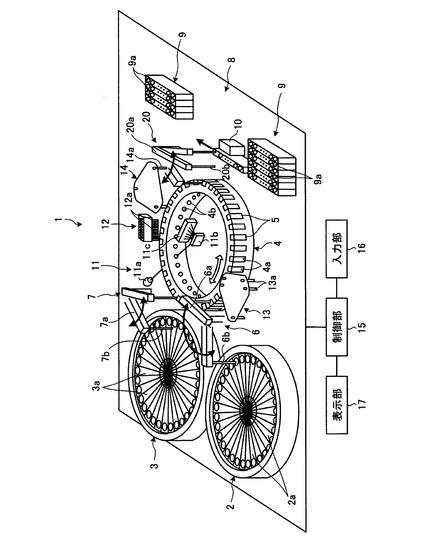
自動分析装置1は、血球成分を含む血液や尿等の検体を自動分析する装置であり、図1に示すように、試薬テーブル2,3、キュベットホイール4、検体容器移送機構8、分析光学系11、洗浄機構12、第一攪拌装置13、第二攪拌装置14、制御部15及び検体分注装置20を備えている。
【0018】
試薬テーブル2,3は、図1に示すように、それぞれ第一試薬の試薬容器2aと第二試薬の試薬容器3aが周方向に複数配置され、駆動手段に回転されて試薬容器2a,3aを周方向に搬送する。複数の試薬容器2a,3aは、それぞれ検査項目に応じて血球成分を溶血させる前処理液を含む試薬が満たされ、外面には収容した試薬の種類,ロット及び有効期限等の情報を記録した情報記録媒体(図示せず)が付加されている。ここで、試薬テーブル2,3の外周には、試薬容器2a,3aに付加した情報記録媒体に記録された試薬情報を読み取り、制御部15へ出力する読取装置が設置されている。
【0019】
キュベットホイール4は、図1に示すように、複数の反応容器5が周方向に沿って配列されており、試薬テーブル2,3を駆動する駆動手段とは異なる駆動手段によって矢印で示す方向に回転されて反応容器5を周方向に移動させる。キュベットホイール4は、光源11aと分光部11bとの間に配置され、反応容器5を保持する保持部4aと光源11aが出射した光束を分光部11bへ導く円形の開口からなる光路4bとを有している。保持部4aは、キュベットホイール4の外周に周方向に沿って所定間隔で配置され、保持部4aの内周側に半径方向に延びる光路4bが形成されている。
【0020】
反応容器5は、分析光学系11から出射された分析光に含まれる光の80%以上を透過する光学的に透明な素材、例えば、耐熱ガラスを含むガラス,環状オレフィンやポリスチレン等によって四角筒状に成形されたキュベットと呼ばれる容器である。反応容器5は、近傍に設けた試薬分注装置6,7によって試薬テーブル2,3の試薬容器2a,3aから試薬が分注される。ここで、試薬分注装置6,7は、それぞれ水平面内を回動すると共に、上下方向に昇降されるアーム6a,7aに試薬を分注する分注プローブ6b,7bが設けられ、洗浄水によって分注プローブ6b,7bを洗浄する洗浄手段を有している。
【0021】
検体容器移送機構8は、図1に示すように、配列された複数のラック9を矢印方向に沿って1つずつ歩進させながら移送する。ラック9は、検体を収容した複数の検体容器9aを保持している。ここで、検体容器移送機構8には、図1に示すように、ラック9に保持される検体容器9aに貼付した前記記録媒体を読み取り、読み取った検体情報及び形状情報を制御部15へ出力する情報取得手段として読取装置10が設けられている。
【0022】
分析光学系11は、試薬と検体とが反応した反応容器5内の液体試料に分析光を透過させて測光する光学系であり、図1に示すように、光源11a、分光部11b及び受光部11cを有している。光源11aから出射された分析光は、反応容器5内の液体試料を透過し、分光部11bと対向する位置に設けた受光部11cによって受光される。受光部11cは、制御部15と接続されている。
【0023】
洗浄機構12は、ノズル12aによって反応容器5内の液体試料を吸引して排出した後、ノズル12aによって洗剤や洗浄水等の洗浄液等を繰り返し注入し、吸引することにより、分析光学系11による測光が終了した反応容器5を洗浄する。
【0024】
第一攪拌装置13及び第二攪拌装置14は、分注された検体と試薬とを攪拌棒13a,14aによって攪拌し、反応させる。
【0025】
制御部15は、試薬テーブル2,3、試薬分注装置6,7、検体容器移送機構8、分析光学系11、洗浄機構12、攪拌装置13,14、入力部16、表示部17及び検体分注装置20等と接続されてこれら各部の作動を制御し、マイクロコンピュータ等が使用される。また、制御部15は、試薬容器2a,3aに付加した情報記録媒体から読み取った情報に基づき、試薬のロットが異なる場合や有効期限外等の場合に分析作業を中止するように自動分析装置1を制御し、或いはオペレータに警報を発する。ここで、制御部15は、分析作業中の分注動作の都度、ロータリエンコーダ38から繰り返し入力される支柱21の振動信号をもとに、支柱21の振動が所定の閾値を超えた場合に回動モータ34の駆動速度を減速制御する。このため、制御部15は、予め所定の閾値が入力されて記憶している。
【0026】
入力部16は、制御部15へ検査項目や沈降成分を含む検体の分注手順等に関する入力操作を行う部分であり、例えば、キーボードやマウス等が使用される。表示部17は、分析内容,分析結果或いは警報等を表示するもので、ディスプレイパネル等が使用される。表示部17は、検体分注装置20が異常である場合にその旨を告知する場合にも使用される。この他、自動分析装置1は、分析結果を一覧表等にしてプリントアウトする出力部も備えている。
【0027】
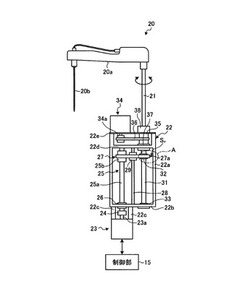
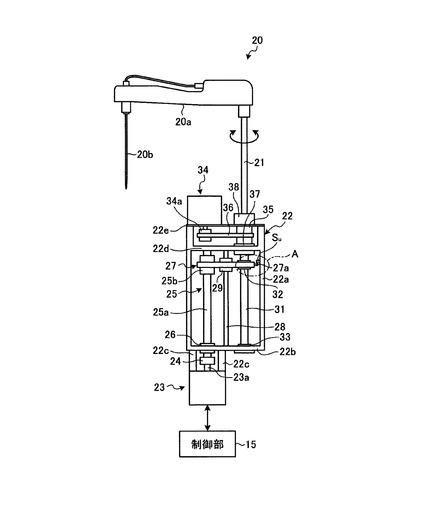
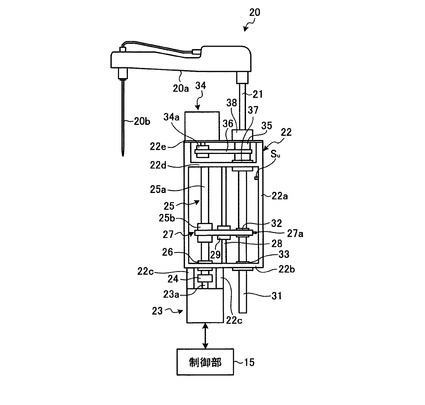
検体分注装置20は、検体容器9a内の検体の液面を検知する液面検知手段を備えており、図2に示すように、駆動機構22によって駆動される分注アーム20aに検体を分注する分注プローブ20bが設けられている。分注アーム20aは、駆動機構22によって昇降駆動と回動駆動される支柱21に支持されている。支柱21は、回動モータ34の回転がタイミングベルト36によって伝達される従動軸であり、外面にスプラインが形成されており、ロータリエンコーダ38が設けられている。
【0028】
駆動機構22は、図2に示すように、筺体22aに昇降モータ23、すべりねじ25、スライダ27、ガイド軸28、支持軸31及び回動モータ34を有している。
【0029】
昇降モータ23は、ステッピングモータが使用され、制御部15によって駆動パルス数を制御することにより、スライダ27の上下位置を微細に制御している。昇降モータ23は、図2に示すように、筺体22aの底板22bにスペーサ22cを介して支持され、回転軸23aがジョイント24によってねじ軸25aの下端と連結されている。すべりねじ25は、ねじ軸25aとナット25bを有している。ねじ軸25aは、底板22bに設けたベアリング26を介して下方へ延出し、上端が仕切り板22dに回転自在に支持されている。ナット25bは、スライダ27に取り付けられている。
【0030】
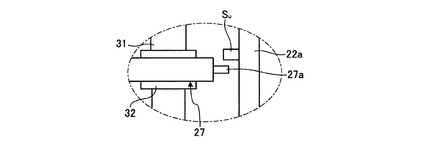
スライダ27は、ねじ軸25aの回転によってナット25bと共に上下動する昇降部材である。図2は、スライダ27が最上昇位置にある状態の図である。スライダ27は、図2及び図3に示すように、支持軸31側の端部にスライダ27の最上昇位置を検出する検出片27aが設けられている。このため、筺体22aは、最上昇位置にある検出片27aの近傍に上点センサSuが設けられている。ここで、スライダ27は、昇降モータ23によって最下降位置として図4に示す位置まで分注アーム20aと共に下降される。
【0031】
上点センサSuは、スライダ27の昇降位置を検知する位置検知手段であり、図2及び図3に示すように、スライダ27の最上昇位置を基準位置として検出片27aによって検知する。検体分注装置20は、スライダ27の最上昇位置を基準位置として制御部15による昇降位置が制御される。上点センサSuは、例えば、近接センサ等を使用しており、検出片27aの検知と非検知とに係るオンオフ信号を制御部15へ出力する。
【0032】
ガイド軸28は、スライダ27の上下動を案内する軸であり、図2に示すように、下端が筺体22aの底板22bに連結され、上端が仕切り板22dに連結されている。このとき、ガイド軸28は、スライダ27との間にスラストベアリング29が配置され、スライダ27の円滑な上下動を保証している。
【0033】
支持軸31は、図2に示すように、スライダ27に設けたベアリング32を介して上方へ延出し、支柱21の下端と連結されている。また、支持軸31は、下端が筺体22aの底板22bに設けたスラストベアリング33によって下方へ下降自在に支持されている。
【0034】
回動モータ34は、図2に示すように、筺体22aの天板22eに設置され、天板22eの下方へ延出した回転軸にプーリ34aが取り付けられている。プーリ34aは、プーリ35との間にタイミングベルト36が掛け渡されている。プーリ35は、回動モータ34の回転によって支柱21を軸廻りに回動させる。このとき、プーリ35は、内部で支柱21の下端が支持軸31の上端と係合されると共に、支柱21と係合し、筺体22aの仕切り板22dに設けたベアリング37に回動自在に支持されている。このため、支持軸31は、スライダ27と共に上下動し、支柱21及び分注アーム20aを昇降駆動させると共に、軸周りに回動して支柱21を回動させ、分注アーム20aを水平面内で回動させる。
【0035】
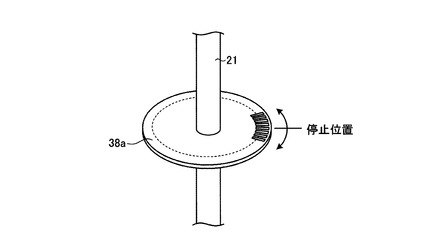
ロータリエンコーダ38は、回動モータ34停止時の支柱21の回転方向の振動を検知する振動検知手段であり、筺体22aの天板22eに設置されている。ロータリエンコーダ38は、図5に示すように、支柱21に取り付けたスリット円板38aによって回動モータ34停止時におけるスリット円板38aの停止位置からの回転角度と回転方向を支柱21の回転方向の振動として検知し、検知した振動を振動信号として制御部15へ出力する。
【0036】
以上のように構成される自動分析装置1は、回転するキュベットホイール4によって周方向に沿って搬送されてくる複数の反応容器5に試薬分注装置6が試薬容器2aから第一試薬を順次分注する。第一試薬が分注された反応容器5は、検体分注装置20によってラック9に保持された複数の検体容器9aから検体が順次分注される。
【0037】
このとき、検体分注装置20は、昇降モータ23の回転によるスライダ27の昇降による支柱21及び分注アーム20aの昇降と、回動モータ34の回転による支柱21及び分注アーム20aを回動とを適宜組み合わせて利用する。これにより、検体分注装置20は、検体容器移送機構8によって分注位置へ搬送されてくるラック9が保持した検体容器9aから検体を吸引し、キュベットホイール4に配列された反応容器5に検体を吐出して検体の分注を行う。
【0038】
そして、検体が分注された反応容器5は、キュベットホイール4が停止する都度、第一攪拌装置13によって攪拌されて第一試薬と検体が反応する。第一試薬と検体が攪拌された反応容器5は、試薬分注装置7によって試薬容器3aから第二試薬が順次分注された後、キュベットホイール4の停止時に第二攪拌装置14によって攪拌され、更なる反応が促進される。ここで、分析対象の検体によっては、必ずしも第一試薬と第二試薬の両方を分注せず、いずれか一方の場合もある。
【0039】
次いで、キュベットホイール4が再び回転すると、キュベットホイール4は、反応容器5が光源11aに対して順次相対移動し、反応容器5が分析光学系11を通過する。これにより、受光部11cが制御部15に光量に応じた信号を出力する。制御部15は、受光部11cから入力される波長ごとの光量に応じた信号をもとに各反応容器5内の液体試料の波長ごとの吸光度を求め、検体の成分濃度等を分析する。このとき、制御部15は、分析した検体の成分濃度等の分析結果を記憶し、分析結果を表示部17に表示する。このようにして、分析が終了した反応容器5は、洗浄機構12によって洗浄された後、再度検体の分析に使用される。
【0040】
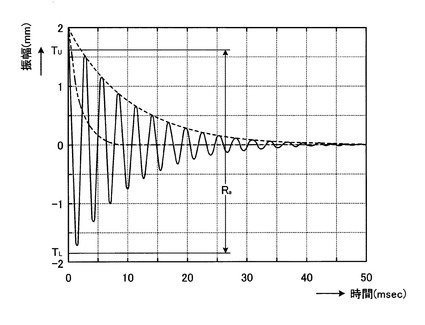
このとき、検体分注装置20は、回動モータ34の回転がタイミングベルト36によって伝達される従動軸である支柱21の回転方向の振動をロータリエンコーダ38によって検知する。ここで、回動モータ34が停止した際、タイミングベルトの経時的な弛みや駆動モータの回転速度が速過ぎたりする等、メンテナンスが不十分であると、支柱21は、回転方向に減衰振動することがある。このため、回動モータ34が停止した際に、ロータリエンコーダ38は、支柱21の回転方向の振動として図6に実線で示す減衰振動を検知する。この場合、図6に示す振幅が所定値を越えると、分注アーム20aが過度に振動し、検体分注装置20は、分注プローブ20b内に吸引した検体の揺れが増大し、分注精度が低下してしまう。
【0041】
そこで、制御部15は、図6に示す支柱21の回転方向の振動に関し、予め所定の上振幅閾値TUと下振幅閾値TLとによって許容振幅範囲Raを決めて、制御部15に記憶させておく。これにより、制御部15は、分析中にロータリエンコーダ38が検知した支柱21の回転方向の振動の振幅が許容振幅範囲Raを超えた場合、回動モータ34の駆動速度を制御し、分注アーム20aの過度な振動を抑制する。この場合、予め複数の速度テーブルを用意して制御部15に記憶しておき、制御部15が、これら複数の速度テーブルの中から許容振幅範囲Ra内に振幅が収まるような速度テーブルを選択し、回動モータ34の駆動速度を自動で減速制御する。
【0042】
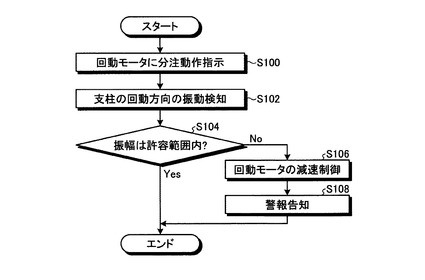
このとき、制御部15は、例えば、分析終了時に、以下のようにして支柱21の回転方向の振動を検知し、回動モータ34の駆動速度を減速制御する。この制御手順として、本発明に係る分注装置のメンテナンス方法を図7に示すフローチャートを参照して以下に説明する。
【0043】
先ず、制御部15は、回動モータ34に分注動作を指示する(ステップS100)。次に、制御部15は、回動モータ34が停止した際の支柱21の回転方向の振動を検知する(ステップS102)。このとき、制御部15は、ロータリエンコーダ38から入力される振動信号から支柱21の回転方向の振動を検知する。
【0044】
次いで、制御部15は、検知した支柱21の回転方向の振動から振幅が許容振幅範囲Ra内か否かを判定する(ステップS104)。判定の結果、振幅が許容振幅範囲Ra内でない場合(ステップS104,No)、制御部15は、回動モータ34の駆動速度を減速制御する(ステップS106)。そして、制御部15は、回動モータ34の駆動速度を減速制御した旨の警報を表示部17に表示させて告知し(ステップS108)、制御手順を終了する。
【0045】
一方、判定の結果、振幅が許容振幅範囲Ra内の場合(ステップS104,Yes)、回動モータ34の駆動速度を制御する必要がないので、制御部15は、制御手順を終了する。
【0046】
このように、制御部15は、回動モータ34の停止時に検体分注装置20における支柱21の回転方向の減衰振動の振幅を許容振幅範囲Ra内に抑制することができる。このため、検体分注装置20は、分注アーム20a、従って分注プローブ20b内に吸引した検体の揺れを抑え、分注精度の低下を防止することができる。従って、自動分析装置1は、検体分注装置20のメンテナンスの頻度を低減すると共に、メンテナンスの周期を延ばすことができる。このとき、検体分注装置20は、上記のように上振幅閾値TUと下振幅閾値TLとによって回動モータ34の駆動速度を減速制御すると、支柱21は、図6に示す一点鎖線のように回転方向の振動を抑制することも可能である。
【0047】
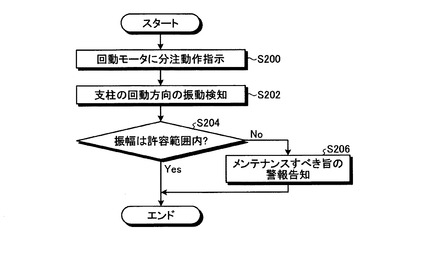
ここで、上記した制御手順は、分析中に支柱21の回転方向の振動を検知し、回動モータ34の駆動速度を減速制御することにより、回動モータ34が停止した際の支柱21の回転方向の減衰振動の振幅を許容振幅範囲Ra内に抑える場合である。この他、本発明に係る分注装置のメンテナンス方法は、例えば、自動分析装置1の電源をオンし、装置を初期化する際に、例えば、メンテナンスモードを選択した場合にも実行可能である。この場合の本発明に係る分注装置のメンテナンス方法を図8に示すフローチャートを参照して以下に説明する。
【0048】
先ず、制御部15は、回動モータ34に分注動作を指示する(ステップS200)。次に、制御部15は、回動モータ34が停止した際の支柱21の回転方向の振動を検知する(ステップS202)。このとき、制御部15は、ロータリエンコーダ38から入力される振動信号から支柱21の回転方向の振動を検知する。
【0049】
次いで、制御部15は、検知した支柱21の回転方向の振動から振幅が許容振幅範囲Ra内か否かを判定する(ステップS204)。判定の結果、振幅が許容振幅範囲Ra内でない場合(ステップS204,No)、制御部15は、分注装置20のメンテナンスをすべき旨の警報を表示部17に表示して告知する(ステップS206)。このとき、制御部15は、回動モータ34の回転を従動軸である支柱21へ伝達するタイミングベルト36のテンション調整を行うように表示部17に表示させた後、制御手順を終了する。
【0050】
一方、判定の結果、振幅が許容振幅範囲Ra内の場合(ステップS104,Yes)、回動モータ34の駆動速度を制御する必要がないので、制御部15は、制御手順を終了する。
【0051】
このように、制御部15は、回動モータ34の停止時に、検体分注装置20における支柱21の回転方向の減衰振動をもとに、振幅が許容振幅範囲Raを超えた場合にタイミングベルト36のテンション調整を行うよう告知する。このため、検体分注装置20は、タイミングベルト36のテンション調整を行うことにより、回動モータ34の停止時に検体分注装置20における支柱21の回転方向の減衰振動の振幅を許容振幅範囲Ra内に抑制することができる。この結果、検体分注装置20は、分注アーム20a、従って分注プローブ20b内に吸引した検体の揺れを抑え、分注精度の低下を防止することができる。従って、自動分析装置1は、適切なタイミングで検体分注装置20をメンテナンスし、検体分注装置20の寿命を延ばすことができる。
【0052】
尚、上記実施の形態は、駆動モータの回転がタイミングベルトによって伝達される分注装置として検体分注装置20の場合について説明した。しかし、本発明は、駆動モータの回転がタイミングベルトによって伝達される分注装置であれば、試薬分注装置に適用してもよい。
【0053】
また、上記実施の形態は、振動検知手段として支柱21の回転方向の振動を検知するロータリエンコーダ38を使用したが、回動モータ34停止時の回動モータ34の回転軸の回転方向の振動を検知するロータリエンコーダを回動モータ34に設けてもよい。
【0054】
更に、上記実施の形態は、振動検知手段として支柱21の回転方向の振動を検知するロータリエンコーダ38を使用した。しかし、振動検知手段は、回動モータ34停止時の支柱21の回転方向の振動を検知することができれば、ロータリエンコーダ38に限定されるものではなく、例えば、支柱21の回転を検知する回転センサを使用してもよい。
【図面の簡単な説明】
【0055】
【図1】本発明の自動分析装置の概略構成図である。
【図2】本発明の分注装置として図1の自動分析装置で使用する検体分注装置を示す概略構成図である。
【図3】図2に示す分注装置のA部拡大図である。
【図4】スライダが最下降位置まで下降した際の図2に示す検体分注装置の概略構成図である。
【図5】ロータリエンコーダ38は、図5に示すように、支柱に取り付けたスリット円板によって回動モータ停止時における支柱の回転方向の振動の検知を説明する図である。
【図6】回動モータが停止した際に、ロータリエンコーダが検出する従動軸である支柱の回転方向の振動の時間変化を示す図である。
【図7】本発明に係る分注装置のメンテナンス方法を説明するフローチャートである。
【図8】図7に示すメンテナンス方法の変形例を説明するフローチャートである。
【符号の説明】
【0056】
1 自動分析装置
2,3 試薬テーブル
4 キュベットホイール
5 反応容器
6,7 試薬分注装置
8 検体容器移送機構
9 ラック
10 読取装置
11 分析光学系
12 洗浄機構
13 第一攪拌装置
14 第二攪拌装置
15 制御部
16 入力部
17 表示部
20 検体分注装置
20a 分注アーム
20b 分注プローブ
21 支柱
22 駆動機構
23 昇降モータ
24 ジョイント
25 すべりねじ
26 ベアリング
27 スライダ
28 ガイド軸
29 スラストベアリング
31 支持軸
32 ベアリング
33 スラストベアリング
34 回動モータ
35 プーリ
36 タイミングベルト
37 ベアリング
38 ロータリエンコーダ
Su 上点センサ
【技術分野】
【0001】
本発明は、分注装置、自動分析装置及び分注装置のメンテナンス方法に関するものである。
【背景技術】
【0002】
従来、分注装置は、駆動モータの回転をタイミングベルトによって伝達して被従動部を駆動するものがある(例えば、特許文献1参照)。
【0003】
【特許文献1】特開2005−181045号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
ところで、駆動モータの回転をタイミングベルトによって分注アームを有する支柱へ伝達する分注装置は、駆動モータ停止時に駆動モータと支柱との間の駆動力の伝達タイミングのずれから支柱が回転方向に振動する。このとき、分注装置は、タイミングベルトが弛んでいたり、駆動モータの回転速度が速過ぎたりすると、支柱の回転方向における振動の振幅が大きくなることがある。駆動モータ停止時に支柱の振動の振幅が大きくなると、分注装置は、分注アーム、従って分注プローブ内に吸引した試薬や検体等の液体試料の揺れが増大し、分注精度が低下してしまうという問題があった。
【0005】
本発明は、上記に鑑みてなされたものであって、駆動モータ停止時における振動の振幅の増大を抑えることが可能な分注装置、自動分析装置及び分注装置のメンテナンス方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
上述した課題を解決し、目的を達成するために、本発明の分注装置は、駆動モータの回転がタイミングベルトによって伝達される従動軸を中心として回動すると共に、前記従動軸に方向に昇降する分注アームを備え、試薬又は検体を含む液体試料を分注する分注装置において、前記駆動モータ停止時の前記従動軸又は前記駆動モータの回転軸の回転方向の振動を検知する振動検知手段と、前記駆動モータの駆動速度を制御する制御手段と、を備え、前記制御手段は、前記振動検知手段が検知した振動の振幅が所定の閾値を超えた場合に前記駆動モータの駆動速度を減速制御することを特徴とする。
【0007】
また、本発明の分注装置は、上記の発明において、前記振動検知手段が検知した振動の振幅が所定の閾値を超えた場合、前記駆動モータの駆動速度を減速制御する旨、又は当該分注装置のメンテナンスをすべき旨の警報を告知する告知手段を備えることを特徴とする。
【0008】
また、本発明の分注装置は、上記の発明において、前記振動検知手段は、前記駆動モータの回転軸又は前記従動軸に設けられるロータリエンコーダであることを特徴とする。
【0009】
また、上述した課題を解決し、目的を達成するために、本発明の自動分析装置は、駆動モータの回転をタイミングベルトによって伝達される従動軸を中心として回動すると共に、前記従動軸に沿って昇降する分注アームを備え、試薬又は検体を含む液体試料を分注する分注装置を用いて分注される検体と試薬とを反応させ、反応液の光学的特性を測定して前記検体を分析する自動分析装置であって、前記分注装置は、前記駆動モータ停止時の前記従動軸又は前記駆動モータの回転軸の振動を検知する振動検知手段と、前記駆動モータの駆動速度を制御する制御手段とを備え、前記制御手段は、前記振動検知手段が検知した振動の振幅が所定の閾値を超えた場合に前記駆動モータの駆動速度を減速制御することを特徴とする。
【0010】
また、本発明の自動分析装置は、上記の発明において、前記分注装置は、前記振動検知手段が検知した振動が所定の閾値を超えた場合に、前記駆動モータの駆動速度を減速制御する旨、又は当該分注装置のメンテナンスをすべき旨の警報を告知する告知手段を備えることを特徴とする。
【0011】
また、本発明の自動分析装置は、上記の発明において、前記振動検知手段は、駆動モータの回転軸又は前記従動軸に設けられるロータリエンコーダであることを特徴とする。
【0012】
また、上述した課題を解決し、目的を達成するために、本発明の分注装置のメンテナンス方法は、駆動モータの回転をタイミングベルトによって伝達される従動軸を中心として回動すると共に、前記従動軸に沿って昇降する分注アームを備え、試薬又は検体を含む液体試料を分注する分注装置であって、前記駆動モータ停止時の前記従動軸又は前記駆動モータの回転軸の回転方向の振動を検知する振動検知工程と、前記駆動モータの駆動速度を制御する制御工程と、を含み、前記制御工程は、前記振動検知工程で検知した振動の振幅が所定の閾値を超えた場合に前記駆動モータの駆動速度を減速制御することを特徴とする。
【0013】
また、本発明の分注装置のメンテナンス方法は、上記の発明において、前記振動検知工程で検知した振動が所定の閾値を超えた場合に、前記駆動モータの駆動速度を減速制御する旨、又は当該分注装置のメンテナンスをすべき旨の警報を告知する告知工程を含むことを特徴とする。
【0014】
また、本発明の分注装置のメンテナンス方法は、上記の発明において、前記振動検知工程は、前記従動軸又は前記駆動モータの回転軸の回転方向の振動を駆動モータの回転軸又は前記従動軸に設けるロータリエンコーダによって検知することを特徴とする。
【発明の効果】
【0015】
本発明によれば、振動検知手段が検知した振動の振幅が所定の閾値を超えた場合に駆動モータの駆動速度を制御手段によって減速制御するので、駆動モータ停止時における振動の振幅の増大を抑えることができるという効果を奏する。
【発明を実施するための最良の形態】
【0016】
以下、本発明の分注装置、自動分析装置及び分注装置のメンテナンス方法にかかる実施の形態について、図面を参照して詳細に説明する。図1は、本発明の自動分析装置の概略構成図である。図2は、本発明の分注装置として図1の自動分析装置で使用する検体分注装置を示す概略構成図である。
【0017】
自動分析装置1は、血球成分を含む血液や尿等の検体を自動分析する装置であり、図1に示すように、試薬テーブル2,3、キュベットホイール4、検体容器移送機構8、分析光学系11、洗浄機構12、第一攪拌装置13、第二攪拌装置14、制御部15及び検体分注装置20を備えている。
【0018】
試薬テーブル2,3は、図1に示すように、それぞれ第一試薬の試薬容器2aと第二試薬の試薬容器3aが周方向に複数配置され、駆動手段に回転されて試薬容器2a,3aを周方向に搬送する。複数の試薬容器2a,3aは、それぞれ検査項目に応じて血球成分を溶血させる前処理液を含む試薬が満たされ、外面には収容した試薬の種類,ロット及び有効期限等の情報を記録した情報記録媒体(図示せず)が付加されている。ここで、試薬テーブル2,3の外周には、試薬容器2a,3aに付加した情報記録媒体に記録された試薬情報を読み取り、制御部15へ出力する読取装置が設置されている。
【0019】
キュベットホイール4は、図1に示すように、複数の反応容器5が周方向に沿って配列されており、試薬テーブル2,3を駆動する駆動手段とは異なる駆動手段によって矢印で示す方向に回転されて反応容器5を周方向に移動させる。キュベットホイール4は、光源11aと分光部11bとの間に配置され、反応容器5を保持する保持部4aと光源11aが出射した光束を分光部11bへ導く円形の開口からなる光路4bとを有している。保持部4aは、キュベットホイール4の外周に周方向に沿って所定間隔で配置され、保持部4aの内周側に半径方向に延びる光路4bが形成されている。
【0020】
反応容器5は、分析光学系11から出射された分析光に含まれる光の80%以上を透過する光学的に透明な素材、例えば、耐熱ガラスを含むガラス,環状オレフィンやポリスチレン等によって四角筒状に成形されたキュベットと呼ばれる容器である。反応容器5は、近傍に設けた試薬分注装置6,7によって試薬テーブル2,3の試薬容器2a,3aから試薬が分注される。ここで、試薬分注装置6,7は、それぞれ水平面内を回動すると共に、上下方向に昇降されるアーム6a,7aに試薬を分注する分注プローブ6b,7bが設けられ、洗浄水によって分注プローブ6b,7bを洗浄する洗浄手段を有している。
【0021】
検体容器移送機構8は、図1に示すように、配列された複数のラック9を矢印方向に沿って1つずつ歩進させながら移送する。ラック9は、検体を収容した複数の検体容器9aを保持している。ここで、検体容器移送機構8には、図1に示すように、ラック9に保持される検体容器9aに貼付した前記記録媒体を読み取り、読み取った検体情報及び形状情報を制御部15へ出力する情報取得手段として読取装置10が設けられている。
【0022】
分析光学系11は、試薬と検体とが反応した反応容器5内の液体試料に分析光を透過させて測光する光学系であり、図1に示すように、光源11a、分光部11b及び受光部11cを有している。光源11aから出射された分析光は、反応容器5内の液体試料を透過し、分光部11bと対向する位置に設けた受光部11cによって受光される。受光部11cは、制御部15と接続されている。
【0023】
洗浄機構12は、ノズル12aによって反応容器5内の液体試料を吸引して排出した後、ノズル12aによって洗剤や洗浄水等の洗浄液等を繰り返し注入し、吸引することにより、分析光学系11による測光が終了した反応容器5を洗浄する。
【0024】
第一攪拌装置13及び第二攪拌装置14は、分注された検体と試薬とを攪拌棒13a,14aによって攪拌し、反応させる。
【0025】
制御部15は、試薬テーブル2,3、試薬分注装置6,7、検体容器移送機構8、分析光学系11、洗浄機構12、攪拌装置13,14、入力部16、表示部17及び検体分注装置20等と接続されてこれら各部の作動を制御し、マイクロコンピュータ等が使用される。また、制御部15は、試薬容器2a,3aに付加した情報記録媒体から読み取った情報に基づき、試薬のロットが異なる場合や有効期限外等の場合に分析作業を中止するように自動分析装置1を制御し、或いはオペレータに警報を発する。ここで、制御部15は、分析作業中の分注動作の都度、ロータリエンコーダ38から繰り返し入力される支柱21の振動信号をもとに、支柱21の振動が所定の閾値を超えた場合に回動モータ34の駆動速度を減速制御する。このため、制御部15は、予め所定の閾値が入力されて記憶している。
【0026】
入力部16は、制御部15へ検査項目や沈降成分を含む検体の分注手順等に関する入力操作を行う部分であり、例えば、キーボードやマウス等が使用される。表示部17は、分析内容,分析結果或いは警報等を表示するもので、ディスプレイパネル等が使用される。表示部17は、検体分注装置20が異常である場合にその旨を告知する場合にも使用される。この他、自動分析装置1は、分析結果を一覧表等にしてプリントアウトする出力部も備えている。
【0027】
検体分注装置20は、検体容器9a内の検体の液面を検知する液面検知手段を備えており、図2に示すように、駆動機構22によって駆動される分注アーム20aに検体を分注する分注プローブ20bが設けられている。分注アーム20aは、駆動機構22によって昇降駆動と回動駆動される支柱21に支持されている。支柱21は、回動モータ34の回転がタイミングベルト36によって伝達される従動軸であり、外面にスプラインが形成されており、ロータリエンコーダ38が設けられている。
【0028】
駆動機構22は、図2に示すように、筺体22aに昇降モータ23、すべりねじ25、スライダ27、ガイド軸28、支持軸31及び回動モータ34を有している。
【0029】
昇降モータ23は、ステッピングモータが使用され、制御部15によって駆動パルス数を制御することにより、スライダ27の上下位置を微細に制御している。昇降モータ23は、図2に示すように、筺体22aの底板22bにスペーサ22cを介して支持され、回転軸23aがジョイント24によってねじ軸25aの下端と連結されている。すべりねじ25は、ねじ軸25aとナット25bを有している。ねじ軸25aは、底板22bに設けたベアリング26を介して下方へ延出し、上端が仕切り板22dに回転自在に支持されている。ナット25bは、スライダ27に取り付けられている。
【0030】
スライダ27は、ねじ軸25aの回転によってナット25bと共に上下動する昇降部材である。図2は、スライダ27が最上昇位置にある状態の図である。スライダ27は、図2及び図3に示すように、支持軸31側の端部にスライダ27の最上昇位置を検出する検出片27aが設けられている。このため、筺体22aは、最上昇位置にある検出片27aの近傍に上点センサSuが設けられている。ここで、スライダ27は、昇降モータ23によって最下降位置として図4に示す位置まで分注アーム20aと共に下降される。
【0031】
上点センサSuは、スライダ27の昇降位置を検知する位置検知手段であり、図2及び図3に示すように、スライダ27の最上昇位置を基準位置として検出片27aによって検知する。検体分注装置20は、スライダ27の最上昇位置を基準位置として制御部15による昇降位置が制御される。上点センサSuは、例えば、近接センサ等を使用しており、検出片27aの検知と非検知とに係るオンオフ信号を制御部15へ出力する。
【0032】
ガイド軸28は、スライダ27の上下動を案内する軸であり、図2に示すように、下端が筺体22aの底板22bに連結され、上端が仕切り板22dに連結されている。このとき、ガイド軸28は、スライダ27との間にスラストベアリング29が配置され、スライダ27の円滑な上下動を保証している。
【0033】
支持軸31は、図2に示すように、スライダ27に設けたベアリング32を介して上方へ延出し、支柱21の下端と連結されている。また、支持軸31は、下端が筺体22aの底板22bに設けたスラストベアリング33によって下方へ下降自在に支持されている。
【0034】
回動モータ34は、図2に示すように、筺体22aの天板22eに設置され、天板22eの下方へ延出した回転軸にプーリ34aが取り付けられている。プーリ34aは、プーリ35との間にタイミングベルト36が掛け渡されている。プーリ35は、回動モータ34の回転によって支柱21を軸廻りに回動させる。このとき、プーリ35は、内部で支柱21の下端が支持軸31の上端と係合されると共に、支柱21と係合し、筺体22aの仕切り板22dに設けたベアリング37に回動自在に支持されている。このため、支持軸31は、スライダ27と共に上下動し、支柱21及び分注アーム20aを昇降駆動させると共に、軸周りに回動して支柱21を回動させ、分注アーム20aを水平面内で回動させる。
【0035】
ロータリエンコーダ38は、回動モータ34停止時の支柱21の回転方向の振動を検知する振動検知手段であり、筺体22aの天板22eに設置されている。ロータリエンコーダ38は、図5に示すように、支柱21に取り付けたスリット円板38aによって回動モータ34停止時におけるスリット円板38aの停止位置からの回転角度と回転方向を支柱21の回転方向の振動として検知し、検知した振動を振動信号として制御部15へ出力する。
【0036】
以上のように構成される自動分析装置1は、回転するキュベットホイール4によって周方向に沿って搬送されてくる複数の反応容器5に試薬分注装置6が試薬容器2aから第一試薬を順次分注する。第一試薬が分注された反応容器5は、検体分注装置20によってラック9に保持された複数の検体容器9aから検体が順次分注される。
【0037】
このとき、検体分注装置20は、昇降モータ23の回転によるスライダ27の昇降による支柱21及び分注アーム20aの昇降と、回動モータ34の回転による支柱21及び分注アーム20aを回動とを適宜組み合わせて利用する。これにより、検体分注装置20は、検体容器移送機構8によって分注位置へ搬送されてくるラック9が保持した検体容器9aから検体を吸引し、キュベットホイール4に配列された反応容器5に検体を吐出して検体の分注を行う。
【0038】
そして、検体が分注された反応容器5は、キュベットホイール4が停止する都度、第一攪拌装置13によって攪拌されて第一試薬と検体が反応する。第一試薬と検体が攪拌された反応容器5は、試薬分注装置7によって試薬容器3aから第二試薬が順次分注された後、キュベットホイール4の停止時に第二攪拌装置14によって攪拌され、更なる反応が促進される。ここで、分析対象の検体によっては、必ずしも第一試薬と第二試薬の両方を分注せず、いずれか一方の場合もある。
【0039】
次いで、キュベットホイール4が再び回転すると、キュベットホイール4は、反応容器5が光源11aに対して順次相対移動し、反応容器5が分析光学系11を通過する。これにより、受光部11cが制御部15に光量に応じた信号を出力する。制御部15は、受光部11cから入力される波長ごとの光量に応じた信号をもとに各反応容器5内の液体試料の波長ごとの吸光度を求め、検体の成分濃度等を分析する。このとき、制御部15は、分析した検体の成分濃度等の分析結果を記憶し、分析結果を表示部17に表示する。このようにして、分析が終了した反応容器5は、洗浄機構12によって洗浄された後、再度検体の分析に使用される。
【0040】
このとき、検体分注装置20は、回動モータ34の回転がタイミングベルト36によって伝達される従動軸である支柱21の回転方向の振動をロータリエンコーダ38によって検知する。ここで、回動モータ34が停止した際、タイミングベルトの経時的な弛みや駆動モータの回転速度が速過ぎたりする等、メンテナンスが不十分であると、支柱21は、回転方向に減衰振動することがある。このため、回動モータ34が停止した際に、ロータリエンコーダ38は、支柱21の回転方向の振動として図6に実線で示す減衰振動を検知する。この場合、図6に示す振幅が所定値を越えると、分注アーム20aが過度に振動し、検体分注装置20は、分注プローブ20b内に吸引した検体の揺れが増大し、分注精度が低下してしまう。
【0041】
そこで、制御部15は、図6に示す支柱21の回転方向の振動に関し、予め所定の上振幅閾値TUと下振幅閾値TLとによって許容振幅範囲Raを決めて、制御部15に記憶させておく。これにより、制御部15は、分析中にロータリエンコーダ38が検知した支柱21の回転方向の振動の振幅が許容振幅範囲Raを超えた場合、回動モータ34の駆動速度を制御し、分注アーム20aの過度な振動を抑制する。この場合、予め複数の速度テーブルを用意して制御部15に記憶しておき、制御部15が、これら複数の速度テーブルの中から許容振幅範囲Ra内に振幅が収まるような速度テーブルを選択し、回動モータ34の駆動速度を自動で減速制御する。
【0042】
このとき、制御部15は、例えば、分析終了時に、以下のようにして支柱21の回転方向の振動を検知し、回動モータ34の駆動速度を減速制御する。この制御手順として、本発明に係る分注装置のメンテナンス方法を図7に示すフローチャートを参照して以下に説明する。
【0043】
先ず、制御部15は、回動モータ34に分注動作を指示する(ステップS100)。次に、制御部15は、回動モータ34が停止した際の支柱21の回転方向の振動を検知する(ステップS102)。このとき、制御部15は、ロータリエンコーダ38から入力される振動信号から支柱21の回転方向の振動を検知する。
【0044】
次いで、制御部15は、検知した支柱21の回転方向の振動から振幅が許容振幅範囲Ra内か否かを判定する(ステップS104)。判定の結果、振幅が許容振幅範囲Ra内でない場合(ステップS104,No)、制御部15は、回動モータ34の駆動速度を減速制御する(ステップS106)。そして、制御部15は、回動モータ34の駆動速度を減速制御した旨の警報を表示部17に表示させて告知し(ステップS108)、制御手順を終了する。
【0045】
一方、判定の結果、振幅が許容振幅範囲Ra内の場合(ステップS104,Yes)、回動モータ34の駆動速度を制御する必要がないので、制御部15は、制御手順を終了する。
【0046】
このように、制御部15は、回動モータ34の停止時に検体分注装置20における支柱21の回転方向の減衰振動の振幅を許容振幅範囲Ra内に抑制することができる。このため、検体分注装置20は、分注アーム20a、従って分注プローブ20b内に吸引した検体の揺れを抑え、分注精度の低下を防止することができる。従って、自動分析装置1は、検体分注装置20のメンテナンスの頻度を低減すると共に、メンテナンスの周期を延ばすことができる。このとき、検体分注装置20は、上記のように上振幅閾値TUと下振幅閾値TLとによって回動モータ34の駆動速度を減速制御すると、支柱21は、図6に示す一点鎖線のように回転方向の振動を抑制することも可能である。
【0047】
ここで、上記した制御手順は、分析中に支柱21の回転方向の振動を検知し、回動モータ34の駆動速度を減速制御することにより、回動モータ34が停止した際の支柱21の回転方向の減衰振動の振幅を許容振幅範囲Ra内に抑える場合である。この他、本発明に係る分注装置のメンテナンス方法は、例えば、自動分析装置1の電源をオンし、装置を初期化する際に、例えば、メンテナンスモードを選択した場合にも実行可能である。この場合の本発明に係る分注装置のメンテナンス方法を図8に示すフローチャートを参照して以下に説明する。
【0048】
先ず、制御部15は、回動モータ34に分注動作を指示する(ステップS200)。次に、制御部15は、回動モータ34が停止した際の支柱21の回転方向の振動を検知する(ステップS202)。このとき、制御部15は、ロータリエンコーダ38から入力される振動信号から支柱21の回転方向の振動を検知する。
【0049】
次いで、制御部15は、検知した支柱21の回転方向の振動から振幅が許容振幅範囲Ra内か否かを判定する(ステップS204)。判定の結果、振幅が許容振幅範囲Ra内でない場合(ステップS204,No)、制御部15は、分注装置20のメンテナンスをすべき旨の警報を表示部17に表示して告知する(ステップS206)。このとき、制御部15は、回動モータ34の回転を従動軸である支柱21へ伝達するタイミングベルト36のテンション調整を行うように表示部17に表示させた後、制御手順を終了する。
【0050】
一方、判定の結果、振幅が許容振幅範囲Ra内の場合(ステップS104,Yes)、回動モータ34の駆動速度を制御する必要がないので、制御部15は、制御手順を終了する。
【0051】
このように、制御部15は、回動モータ34の停止時に、検体分注装置20における支柱21の回転方向の減衰振動をもとに、振幅が許容振幅範囲Raを超えた場合にタイミングベルト36のテンション調整を行うよう告知する。このため、検体分注装置20は、タイミングベルト36のテンション調整を行うことにより、回動モータ34の停止時に検体分注装置20における支柱21の回転方向の減衰振動の振幅を許容振幅範囲Ra内に抑制することができる。この結果、検体分注装置20は、分注アーム20a、従って分注プローブ20b内に吸引した検体の揺れを抑え、分注精度の低下を防止することができる。従って、自動分析装置1は、適切なタイミングで検体分注装置20をメンテナンスし、検体分注装置20の寿命を延ばすことができる。
【0052】
尚、上記実施の形態は、駆動モータの回転がタイミングベルトによって伝達される分注装置として検体分注装置20の場合について説明した。しかし、本発明は、駆動モータの回転がタイミングベルトによって伝達される分注装置であれば、試薬分注装置に適用してもよい。
【0053】
また、上記実施の形態は、振動検知手段として支柱21の回転方向の振動を検知するロータリエンコーダ38を使用したが、回動モータ34停止時の回動モータ34の回転軸の回転方向の振動を検知するロータリエンコーダを回動モータ34に設けてもよい。
【0054】
更に、上記実施の形態は、振動検知手段として支柱21の回転方向の振動を検知するロータリエンコーダ38を使用した。しかし、振動検知手段は、回動モータ34停止時の支柱21の回転方向の振動を検知することができれば、ロータリエンコーダ38に限定されるものではなく、例えば、支柱21の回転を検知する回転センサを使用してもよい。
【図面の簡単な説明】
【0055】
【図1】本発明の自動分析装置の概略構成図である。
【図2】本発明の分注装置として図1の自動分析装置で使用する検体分注装置を示す概略構成図である。
【図3】図2に示す分注装置のA部拡大図である。
【図4】スライダが最下降位置まで下降した際の図2に示す検体分注装置の概略構成図である。
【図5】ロータリエンコーダ38は、図5に示すように、支柱に取り付けたスリット円板によって回動モータ停止時における支柱の回転方向の振動の検知を説明する図である。
【図6】回動モータが停止した際に、ロータリエンコーダが検出する従動軸である支柱の回転方向の振動の時間変化を示す図である。
【図7】本発明に係る分注装置のメンテナンス方法を説明するフローチャートである。
【図8】図7に示すメンテナンス方法の変形例を説明するフローチャートである。
【符号の説明】
【0056】
1 自動分析装置
2,3 試薬テーブル
4 キュベットホイール
5 反応容器
6,7 試薬分注装置
8 検体容器移送機構
9 ラック
10 読取装置
11 分析光学系
12 洗浄機構
13 第一攪拌装置
14 第二攪拌装置
15 制御部
16 入力部
17 表示部
20 検体分注装置
20a 分注アーム
20b 分注プローブ
21 支柱
22 駆動機構
23 昇降モータ
24 ジョイント
25 すべりねじ
26 ベアリング
27 スライダ
28 ガイド軸
29 スラストベアリング
31 支持軸
32 ベアリング
33 スラストベアリング
34 回動モータ
35 プーリ
36 タイミングベルト
37 ベアリング
38 ロータリエンコーダ
Su 上点センサ
【特許請求の範囲】
【請求項1】
駆動モータの回転がタイミングベルトによって伝達される従動軸を中心として回動すると共に、前記従動軸方向に昇降する分注アームを備え、試薬又は検体を含む液体試料を分注する分注装置において、
前記駆動モータ停止時の前記従動軸又は前記駆動モータの回転軸の回転方向の振動を検知する振動検知手段と、
前記駆動モータの駆動速度を制御する制御手段と、
を備え、前記制御手段は、前記振動検知手段が検知した振動の振幅が所定の閾値を超えた場合に前記駆動モータの駆動速度を減速制御することを特徴とする分注装置。
【請求項2】
前記振動検知手段が検知した振動の振幅が所定の閾値を超えた場合、前記駆動モータの駆動速度を減速制御する旨、又は当該分注装置のメンテナンスをすべき旨の警報を告知する告知手段を備えることを特徴とする請求項1に記載の分注装置。
【請求項3】
前記振動検知手段は、前記駆動モータの回転軸又は前記従動軸に設けられるロータリエンコーダであることを特徴とする請求項1又は2に記載の分注装置。
【請求項4】
駆動モータの回転をタイミングベルトによって伝達される従動軸を中心として回動すると共に、前記従動軸に沿って昇降する分注アームを備え、試薬又は検体を含む液体試料を分注する分注装置を用いて分注される検体と試薬とを反応させ、反応液の光学的特性を測定して前記検体を分析する自動分析装置であって、
前記分注装置は、前記駆動モータ停止時の前記従動軸又は前記駆動モータの回転軸の振動を検知する振動検知手段と、前記駆動モータの駆動速度を制御する制御手段とを備え、前記制御手段は、前記振動検知手段が検知した振動の振幅が所定の閾値を超えた場合に前記駆動モータの駆動速度を減速制御することを特徴とする自動分析装置。
【請求項5】
前記分注装置は、前記振動検知手段が検知した振動が所定の閾値を超えた場合に、前記駆動モータの駆動速度を減速制御する旨、又は当該分注装置のメンテナンスをすべき旨の警報を告知する告知手段を備えることを特徴とする請求項4に記載の自動分析装置。
【請求項6】
前記振動検知手段は、駆動モータの回転軸又は前記従動軸に設けられるロータリエンコーダであることを特徴とする請求項4又は5に記載の自動分析装置。
【請求項7】
駆動モータの回転をタイミングベルトによって伝達される従動軸を中心として回動すると共に、前記従動軸に沿って昇降する分注アームを備え、試薬又は検体を含む液体試料を分注する分注装置であって、
前記駆動モータ停止時の前記従動軸又は前記駆動モータの回転軸の回転方向の振動を検知する振動検知工程と、
前記駆動モータの駆動速度を制御する制御工程と、
を含み、前記制御工程は、前記振動検知工程で検知した振動の振幅が所定の閾値を超えた場合に前記駆動モータの駆動速度を減速制御することを特徴とする分注装置のメンテナンス方法。
【請求項8】
前記振動検知工程で検知した振動が所定の閾値を超えた場合に、前記駆動モータの駆動速度を減速制御する旨、又は当該分注装置のメンテナンスをすべき旨の警報を告知する告知工程を含むことを特徴とする請求項7に記載の分注装置のメンテナンス方法。
【請求項9】
前記振動検知工程は、前記従動軸又は前記駆動モータの回転軸の回転方向の振動を駆動モータの回転軸又は前記従動軸に設けるロータリエンコーダによって検知することを特徴とする請求項7又は8に記載の分注装置のメンテナンス方法。
【請求項1】
駆動モータの回転がタイミングベルトによって伝達される従動軸を中心として回動すると共に、前記従動軸方向に昇降する分注アームを備え、試薬又は検体を含む液体試料を分注する分注装置において、
前記駆動モータ停止時の前記従動軸又は前記駆動モータの回転軸の回転方向の振動を検知する振動検知手段と、
前記駆動モータの駆動速度を制御する制御手段と、
を備え、前記制御手段は、前記振動検知手段が検知した振動の振幅が所定の閾値を超えた場合に前記駆動モータの駆動速度を減速制御することを特徴とする分注装置。
【請求項2】
前記振動検知手段が検知した振動の振幅が所定の閾値を超えた場合、前記駆動モータの駆動速度を減速制御する旨、又は当該分注装置のメンテナンスをすべき旨の警報を告知する告知手段を備えることを特徴とする請求項1に記載の分注装置。
【請求項3】
前記振動検知手段は、前記駆動モータの回転軸又は前記従動軸に設けられるロータリエンコーダであることを特徴とする請求項1又は2に記載の分注装置。
【請求項4】
駆動モータの回転をタイミングベルトによって伝達される従動軸を中心として回動すると共に、前記従動軸に沿って昇降する分注アームを備え、試薬又は検体を含む液体試料を分注する分注装置を用いて分注される検体と試薬とを反応させ、反応液の光学的特性を測定して前記検体を分析する自動分析装置であって、
前記分注装置は、前記駆動モータ停止時の前記従動軸又は前記駆動モータの回転軸の振動を検知する振動検知手段と、前記駆動モータの駆動速度を制御する制御手段とを備え、前記制御手段は、前記振動検知手段が検知した振動の振幅が所定の閾値を超えた場合に前記駆動モータの駆動速度を減速制御することを特徴とする自動分析装置。
【請求項5】
前記分注装置は、前記振動検知手段が検知した振動が所定の閾値を超えた場合に、前記駆動モータの駆動速度を減速制御する旨、又は当該分注装置のメンテナンスをすべき旨の警報を告知する告知手段を備えることを特徴とする請求項4に記載の自動分析装置。
【請求項6】
前記振動検知手段は、駆動モータの回転軸又は前記従動軸に設けられるロータリエンコーダであることを特徴とする請求項4又は5に記載の自動分析装置。
【請求項7】
駆動モータの回転をタイミングベルトによって伝達される従動軸を中心として回動すると共に、前記従動軸に沿って昇降する分注アームを備え、試薬又は検体を含む液体試料を分注する分注装置であって、
前記駆動モータ停止時の前記従動軸又は前記駆動モータの回転軸の回転方向の振動を検知する振動検知工程と、
前記駆動モータの駆動速度を制御する制御工程と、
を含み、前記制御工程は、前記振動検知工程で検知した振動の振幅が所定の閾値を超えた場合に前記駆動モータの駆動速度を減速制御することを特徴とする分注装置のメンテナンス方法。
【請求項8】
前記振動検知工程で検知した振動が所定の閾値を超えた場合に、前記駆動モータの駆動速度を減速制御する旨、又は当該分注装置のメンテナンスをすべき旨の警報を告知する告知工程を含むことを特徴とする請求項7に記載の分注装置のメンテナンス方法。
【請求項9】
前記振動検知工程は、前記従動軸又は前記駆動モータの回転軸の回転方向の振動を駆動モータの回転軸又は前記従動軸に設けるロータリエンコーダによって検知することを特徴とする請求項7又は8に記載の分注装置のメンテナンス方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2010−181292(P2010−181292A)
【公開日】平成22年8月19日(2010.8.19)
【国際特許分類】
【出願番号】特願2009−25386(P2009−25386)
【出願日】平成21年2月5日(2009.2.5)
【出願人】(510005889)ベックマン・コールター・インコーポレーテッド (174)
【Fターム(参考)】
【公開日】平成22年8月19日(2010.8.19)
【国際特許分類】
【出願日】平成21年2月5日(2009.2.5)
【出願人】(510005889)ベックマン・コールター・インコーポレーテッド (174)
【Fターム(参考)】
[ Back to top ]