
分注装置のティーチング方法
【課題】ピペットを下降させる目標位置を制御プログラムにティーチングにより設定する際、作業者間のばらつきが発生することを防止する。
【解決手段】先端にチップ2が装着可能なノズル部1Aを、Z移動機構12によりZ方向に進退動可能なピペット1が搭載された分注ヘッドを、X・Y移動機構によりXY方向に移動させ、所定のステージに位置決めした後、該ステージ上の、対象物8に近接する位置に、前記Z移動機構によりピペットを下降させて位置決めする分注動作を制御プログラムにより行なう分注装置において、該制御プログラムに前記ピペットを下降させる目標位置を設定する分注装置のティーチング方法において、前記ピペットの接触を検知する接触センサ17を使用し、該ピペットを前記制御プログラムにより下降させた際に、該接触センサから検知信号が出力された時点のZ座標に基づいて、目標位置を設定する。
【解決手段】先端にチップ2が装着可能なノズル部1Aを、Z移動機構12によりZ方向に進退動可能なピペット1が搭載された分注ヘッドを、X・Y移動機構によりXY方向に移動させ、所定のステージに位置決めした後、該ステージ上の、対象物8に近接する位置に、前記Z移動機構によりピペットを下降させて位置決めする分注動作を制御プログラムにより行なう分注装置において、該制御プログラムに前記ピペットを下降させる目標位置を設定する分注装置のティーチング方法において、前記ピペットの接触を検知する接触センサ17を使用し、該ピペットを前記制御プログラムにより下降させた際に、該接触センサから検知信号が出力された時点のZ座標に基づいて、目標位置を設定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、液体を吸引、吐出する機能を有する分注装置において、分注ヘッドに搭載されたピペットを下降させる目標位置を設定する際に適用して好適な、分注装置のティーチング方法に関する。
【背景技術】
【0002】
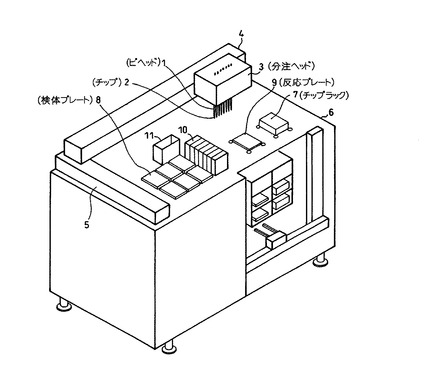
図1には、従来の分注装置の一例を示す。図中、符号1は、ノズル部の先端に取り外しが可能なチップ2が装着されたピペットであり、その内部にはチップ中に分取し、移動させたい液体を吸引・吐出する機構(図示せず)が形成されている。
【0003】
このピペット1は、分注ヘッド3に単数又は所定の複数(ここでは複数)を単位に上下方向にそれぞれ移動させるZ移動機構(後述する)を介して保持されている(例えば、特許文献1参照)。この分注ヘッド3は、X移動機構4と、Y移動機構5により、テーブル6上の任意の場所に移動可能である。
【0004】
このテーブル6上では、チップ1を保持しておくチップラック7、配列形成された複数の容器部に検体が貯留されている複数の検体プレート8、同構造の反応プレート9及び複数の試薬ボルト10等の各対象物が、対応する各ステージ上に載置され、且つ所定位置には下方にチップを落下させて廃棄するためのチップ廃棄口11が設置されている。
【0005】
ここで、この分注装置で行なわれる分注動作の一例を説明する。まず、分注ヘッド3はチップラック7に移動し、ピペット1のノズル部先端にチップ2を装着する。次いで、検体プレート8へ移動し、そこから検体をチップ2内に吸引し、反応プレート9へ移動してその容器部に吐出する。その後、分注ヘッド3は試薬ボトル10へ移動し、該ボトル10より試薬を吸引し、再び反応プレート9へ戻って該当する容器部へ吐出して反応を開始させる。以上の一連の動作の最後にチップ廃棄口11へ移動し、チップを廃棄する。
【0006】
このように分注時には分注ヘッド3はテーブル6上の各ステージに移動し、ピペットを下降させてノズル部の先端を部品(例えばチップ)に合致させたり、チップの先端を各プレートの容器部底面に合致させたりする必要がある。
【0007】
そのため、従来はピペット1を下降させる目標位置を制御プログラムに設定する場合には、実際に分注ヘッド3を該当するステージ位置にXY移動させた後、ピペット1を下降させ、装着されているチップ2の先端とプレートの容器底面やノズル部先端と部品の位置関係を目視で確認しながら、例えば0.1mmずつ下降量を入力することにより、制御プログラム(ソフト)に目標値として設定するティーチングを行なっていた。
【0008】
【特許文献1】特開2004−245715号公報
【発明の開示】
【発明が解決しようとする課題】
【0009】
しかしながら、前述したピペットを下降させる目標位置をティーチングにより設定する方法には、目視によりチップ先端等の到達位置を判断しているため、作業者間のばらつきが大きい上に、容器の底が深い場合等では先端の到達位置を目視で判断することができない場合もあるという問題があった。
【0010】
本発明は、前記従来の問題点を解決するべくなされたもので、ピペットを下降させる目標位置を制御プログラムにティーチングにより設定する際、作業者間でばらつきが発生することを防止でき、しかも先端の下降位置を目視で判断できない場合でも確実に設定することができる分注装置のティーチング方法を提供することを課題とする。
【課題を解決するための手段】
【0011】
本発明は、先端にチップが装着可能で、且つ、Z移動機構によりZ方向に進退動可能なノズル部を備えたピペットが搭載されている分注ヘッドを、X・Y移動機構によりXY方向に移動させ、テーブル上の所定のステージに位置決めした後、該ステージ上に載置されている対象物に近接する位置に、前記Z移動機構によりピペットを下降させて位置決めする分注動作を制御プログラムにより行なう分注装置で、該制御プログラムに前記ピペットを下降させる目標位置を設定する分注装置のティーチング方法において、前記ピペットの接触を検知する接触センサを使用し、該ピペットを前記制御プログラムにより下降させた際に、該接触センサから検知信号が出力された時点のZ座標に基づいて、目標位置を設定することにより、前記課題を解決したものである。
【0012】
本発明は、又、前記接触センサとして、ピペットに対する過負荷発生を防止する安全装置として用いられているセンサとドグを利用するようにしてもよい。
【発明の効果】
【0013】
本発明によれば、ピペットを下降させて制御プログラムに目標位置をティーチングにより設定する際、ピペットの下降時に出力される接触センサの検知信号に基づいて目標位置を設定するようにしたので、作業者間でばらつきが発生することを防止でき、しかも目視で到達位置を確認できない場合でも、確実に目標位置をティーチングにより設定することができる。
【発明を実施するための最良の形態】
【0014】
以下、図面を参照して、本発明の実施の形態について詳細に説明する。
【0015】
本実施形態に適用される分注装置の基本構成は、前記図1に示したものと実質的に同一である。
【0016】
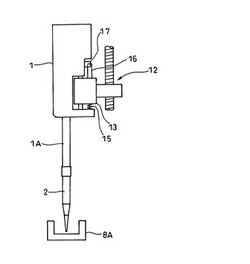
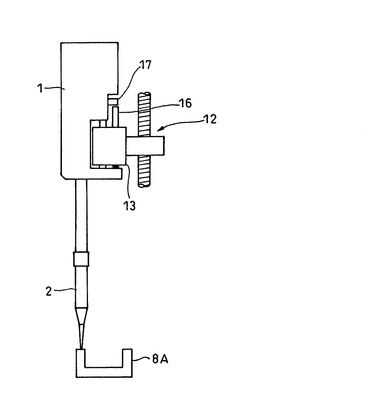
図2には、前記分注ヘッド3に搭載されている1本のピペット1を抽出し、拡大して示す。このピペット1は、分注ヘッド3に固定されているモータ(図示せず)により回転されるボールねじと、これが螺合されたナット部とからなる上下(Z)移動機構12に連結されたブロック13を介して該ヘッド3に搭載されている。
【0017】
このブロック13は、Z方向に挿通されているガイドシャフト14により上下に移動可能にピペット1に連結されており、該ピペット1はブロック13の下端のばね15の作用により下向きに付勢されている。又、ブロック13に対してピペット1の上下位置が正常であることは、フォトインタラプタを構成するセンサとドグにより、即ちブロック13の上端に設けられているドグ16がピペット1側に設けられているセンサ17により検知された状態にあることによって制御上認識されている。
【0018】
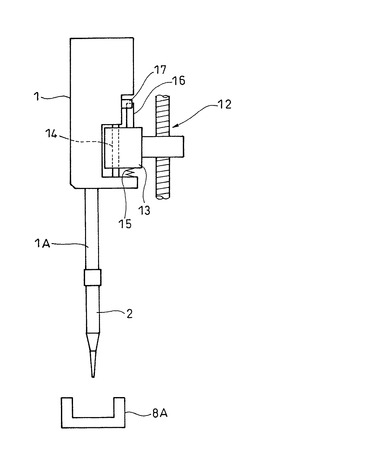
図3に、ピペット1と容器(検体プレートの1つの容器部に相当する)8Aとの位置関係を示す。該ピペット1が正常に設定された高さ(図では容器底面直近)まで下降した場合は、ピペット1とブロック13の位置関係は変化せず、ドグ16はセンサ17に検知されたままである。
【0019】
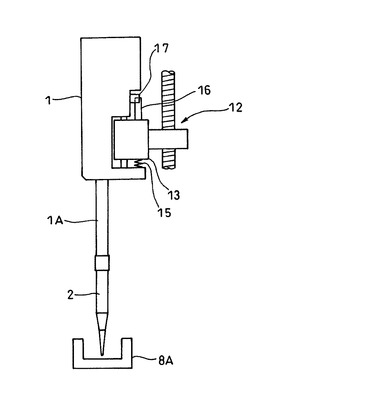
ところが、図4に示すように、ピペット下降時にチップ先端(場合によってはノズル先端やピペット本体)が何かに衝突し、ピペット自体の下降が妨げられた場合は、ピペット1はその高さに留まるが分注ヘッド3の上下移動機構12はばね15の長さ分下降を続ける。
【0020】
その結果、ブロック13の上端に取付けられているドグ16がピペット1に取付けられているセンサ17から外れて検知されなくなると、制御ユニット(図示せず)によりヘッド3の上下移動機構12に停止命令が下り、下降を中止する。このようにセンサ17とドグ16からなる安全装置(フォトインタラプタ)によりピペット1に対する過負荷の発生が回避されるようになっている。
【0021】
本実施形態においては、この安全装置を利用して、ピペット1を下降させる目標位置のティーチングによる設定を行なう。
【0022】
例えば、検体プレート8の底面高さをティーチングする場合であれば、ノズル部1Aにチップ2を装着した状態で該プレートに対してピペット1を下降させる。その際、ピペット1を下降させた状態が、便宜上図3に示すようであるとすると、チップ2の先端が底面と接触した位置をドグ16がセンサ17に検知されるぎりぎりになるように、予め該センサ17を調整しておく。これにより、チップ2の先端が底面に接触した後、上下移動機構12によりブロック13の位置が少しでも下がると、センサ17からドグ16が外れたことが検知されることになる。
【0023】
即ち、その直前の位置がチップ2の先端とプレートの底面が一致した接触高さ(Z座標)と認識され、その値より、例えば0.1mmを減じた値を実際の目標高さとして制御プログラムに取り込むことができる。又、ピペット1を下降させるXY座標の位置認識、チップ2の先端と各ステージの対象物との接触認識は、制御プログラムにより自動で行なうことができ、且つZ方向の位置も人の判断を介さずに取得できるため、テーブル6上の各ステージについてZ位置情報を自動で取得できるようになる。
【0024】
以上詳述した本実施形態によれば、以下の効果が得られる。
【0025】
(1)安全装置として使っているセンサとドグを調整し、接触センサとして利用することにより、新たにセンサを付加することなく、検知されるZ方向の座標値に基づいてピペットを下降させる目標位置を設定することができる。
【0026】
(2)作業者による目視等の感覚による判断が無くなるため、取得される高さデータの精度が向上する。
【0027】
(3)制御ソフトにより高さ位置情報を取得し、目標高さを設定するティーチングの自動化ができる。
【0028】
(4)対象物の表面にチップ等の先端を実際に接触させるため、正確な高さをティーチング(設定)することができる。
【0029】
なお、前記実施形態では、安全装置としてのフォトインタラプタを構成するセンサとドグを利用する場合を説明したが、これに限定されず近接センサ等の専用の接触センサを別途設けるようにしても良い。
【図面の簡単な説明】
【0030】
【図1】分注装置全体の概要を示す斜視図
【図2】分注ヘッドに搭載されているピペットを拡大して示す側面図
【図3】ピペット下降時の正常状態を示す側面図
【図4】ピペット下降時の異常状態を示す側面図
【符号の説明】
【0031】
1…ピペット
1A…ノズル部
2…チップ
3…分注ヘッド
4…X移動機構
5…Y移動機構
8…検体プレート
9…反応プレート
10…試薬ボトル
12…上下(Z)移動機構
16…ドグ
17…センサ
【技術分野】
【0001】
本発明は、液体を吸引、吐出する機能を有する分注装置において、分注ヘッドに搭載されたピペットを下降させる目標位置を設定する際に適用して好適な、分注装置のティーチング方法に関する。
【背景技術】
【0002】
図1には、従来の分注装置の一例を示す。図中、符号1は、ノズル部の先端に取り外しが可能なチップ2が装着されたピペットであり、その内部にはチップ中に分取し、移動させたい液体を吸引・吐出する機構(図示せず)が形成されている。
【0003】
このピペット1は、分注ヘッド3に単数又は所定の複数(ここでは複数)を単位に上下方向にそれぞれ移動させるZ移動機構(後述する)を介して保持されている(例えば、特許文献1参照)。この分注ヘッド3は、X移動機構4と、Y移動機構5により、テーブル6上の任意の場所に移動可能である。
【0004】
このテーブル6上では、チップ1を保持しておくチップラック7、配列形成された複数の容器部に検体が貯留されている複数の検体プレート8、同構造の反応プレート9及び複数の試薬ボルト10等の各対象物が、対応する各ステージ上に載置され、且つ所定位置には下方にチップを落下させて廃棄するためのチップ廃棄口11が設置されている。
【0005】
ここで、この分注装置で行なわれる分注動作の一例を説明する。まず、分注ヘッド3はチップラック7に移動し、ピペット1のノズル部先端にチップ2を装着する。次いで、検体プレート8へ移動し、そこから検体をチップ2内に吸引し、反応プレート9へ移動してその容器部に吐出する。その後、分注ヘッド3は試薬ボトル10へ移動し、該ボトル10より試薬を吸引し、再び反応プレート9へ戻って該当する容器部へ吐出して反応を開始させる。以上の一連の動作の最後にチップ廃棄口11へ移動し、チップを廃棄する。
【0006】
このように分注時には分注ヘッド3はテーブル6上の各ステージに移動し、ピペットを下降させてノズル部の先端を部品(例えばチップ)に合致させたり、チップの先端を各プレートの容器部底面に合致させたりする必要がある。
【0007】
そのため、従来はピペット1を下降させる目標位置を制御プログラムに設定する場合には、実際に分注ヘッド3を該当するステージ位置にXY移動させた後、ピペット1を下降させ、装着されているチップ2の先端とプレートの容器底面やノズル部先端と部品の位置関係を目視で確認しながら、例えば0.1mmずつ下降量を入力することにより、制御プログラム(ソフト)に目標値として設定するティーチングを行なっていた。
【0008】
【特許文献1】特開2004−245715号公報
【発明の開示】
【発明が解決しようとする課題】
【0009】
しかしながら、前述したピペットを下降させる目標位置をティーチングにより設定する方法には、目視によりチップ先端等の到達位置を判断しているため、作業者間のばらつきが大きい上に、容器の底が深い場合等では先端の到達位置を目視で判断することができない場合もあるという問題があった。
【0010】
本発明は、前記従来の問題点を解決するべくなされたもので、ピペットを下降させる目標位置を制御プログラムにティーチングにより設定する際、作業者間でばらつきが発生することを防止でき、しかも先端の下降位置を目視で判断できない場合でも確実に設定することができる分注装置のティーチング方法を提供することを課題とする。
【課題を解決するための手段】
【0011】
本発明は、先端にチップが装着可能で、且つ、Z移動機構によりZ方向に進退動可能なノズル部を備えたピペットが搭載されている分注ヘッドを、X・Y移動機構によりXY方向に移動させ、テーブル上の所定のステージに位置決めした後、該ステージ上に載置されている対象物に近接する位置に、前記Z移動機構によりピペットを下降させて位置決めする分注動作を制御プログラムにより行なう分注装置で、該制御プログラムに前記ピペットを下降させる目標位置を設定する分注装置のティーチング方法において、前記ピペットの接触を検知する接触センサを使用し、該ピペットを前記制御プログラムにより下降させた際に、該接触センサから検知信号が出力された時点のZ座標に基づいて、目標位置を設定することにより、前記課題を解決したものである。
【0012】
本発明は、又、前記接触センサとして、ピペットに対する過負荷発生を防止する安全装置として用いられているセンサとドグを利用するようにしてもよい。
【発明の効果】
【0013】
本発明によれば、ピペットを下降させて制御プログラムに目標位置をティーチングにより設定する際、ピペットの下降時に出力される接触センサの検知信号に基づいて目標位置を設定するようにしたので、作業者間でばらつきが発生することを防止でき、しかも目視で到達位置を確認できない場合でも、確実に目標位置をティーチングにより設定することができる。
【発明を実施するための最良の形態】
【0014】
以下、図面を参照して、本発明の実施の形態について詳細に説明する。
【0015】
本実施形態に適用される分注装置の基本構成は、前記図1に示したものと実質的に同一である。
【0016】
図2には、前記分注ヘッド3に搭載されている1本のピペット1を抽出し、拡大して示す。このピペット1は、分注ヘッド3に固定されているモータ(図示せず)により回転されるボールねじと、これが螺合されたナット部とからなる上下(Z)移動機構12に連結されたブロック13を介して該ヘッド3に搭載されている。
【0017】
このブロック13は、Z方向に挿通されているガイドシャフト14により上下に移動可能にピペット1に連結されており、該ピペット1はブロック13の下端のばね15の作用により下向きに付勢されている。又、ブロック13に対してピペット1の上下位置が正常であることは、フォトインタラプタを構成するセンサとドグにより、即ちブロック13の上端に設けられているドグ16がピペット1側に設けられているセンサ17により検知された状態にあることによって制御上認識されている。
【0018】
図3に、ピペット1と容器(検体プレートの1つの容器部に相当する)8Aとの位置関係を示す。該ピペット1が正常に設定された高さ(図では容器底面直近)まで下降した場合は、ピペット1とブロック13の位置関係は変化せず、ドグ16はセンサ17に検知されたままである。
【0019】
ところが、図4に示すように、ピペット下降時にチップ先端(場合によってはノズル先端やピペット本体)が何かに衝突し、ピペット自体の下降が妨げられた場合は、ピペット1はその高さに留まるが分注ヘッド3の上下移動機構12はばね15の長さ分下降を続ける。
【0020】
その結果、ブロック13の上端に取付けられているドグ16がピペット1に取付けられているセンサ17から外れて検知されなくなると、制御ユニット(図示せず)によりヘッド3の上下移動機構12に停止命令が下り、下降を中止する。このようにセンサ17とドグ16からなる安全装置(フォトインタラプタ)によりピペット1に対する過負荷の発生が回避されるようになっている。
【0021】
本実施形態においては、この安全装置を利用して、ピペット1を下降させる目標位置のティーチングによる設定を行なう。
【0022】
例えば、検体プレート8の底面高さをティーチングする場合であれば、ノズル部1Aにチップ2を装着した状態で該プレートに対してピペット1を下降させる。その際、ピペット1を下降させた状態が、便宜上図3に示すようであるとすると、チップ2の先端が底面と接触した位置をドグ16がセンサ17に検知されるぎりぎりになるように、予め該センサ17を調整しておく。これにより、チップ2の先端が底面に接触した後、上下移動機構12によりブロック13の位置が少しでも下がると、センサ17からドグ16が外れたことが検知されることになる。
【0023】
即ち、その直前の位置がチップ2の先端とプレートの底面が一致した接触高さ(Z座標)と認識され、その値より、例えば0.1mmを減じた値を実際の目標高さとして制御プログラムに取り込むことができる。又、ピペット1を下降させるXY座標の位置認識、チップ2の先端と各ステージの対象物との接触認識は、制御プログラムにより自動で行なうことができ、且つZ方向の位置も人の判断を介さずに取得できるため、テーブル6上の各ステージについてZ位置情報を自動で取得できるようになる。
【0024】
以上詳述した本実施形態によれば、以下の効果が得られる。
【0025】
(1)安全装置として使っているセンサとドグを調整し、接触センサとして利用することにより、新たにセンサを付加することなく、検知されるZ方向の座標値に基づいてピペットを下降させる目標位置を設定することができる。
【0026】
(2)作業者による目視等の感覚による判断が無くなるため、取得される高さデータの精度が向上する。
【0027】
(3)制御ソフトにより高さ位置情報を取得し、目標高さを設定するティーチングの自動化ができる。
【0028】
(4)対象物の表面にチップ等の先端を実際に接触させるため、正確な高さをティーチング(設定)することができる。
【0029】
なお、前記実施形態では、安全装置としてのフォトインタラプタを構成するセンサとドグを利用する場合を説明したが、これに限定されず近接センサ等の専用の接触センサを別途設けるようにしても良い。
【図面の簡単な説明】
【0030】
【図1】分注装置全体の概要を示す斜視図
【図2】分注ヘッドに搭載されているピペットを拡大して示す側面図
【図3】ピペット下降時の正常状態を示す側面図
【図4】ピペット下降時の異常状態を示す側面図
【符号の説明】
【0031】
1…ピペット
1A…ノズル部
2…チップ
3…分注ヘッド
4…X移動機構
5…Y移動機構
8…検体プレート
9…反応プレート
10…試薬ボトル
12…上下(Z)移動機構
16…ドグ
17…センサ
【特許請求の範囲】
【請求項1】
先端にチップが装着可能で、且つ、Z移動機構によりZ方向に進退動可能なノズル部を備えたピペットが搭載されている分注ヘッドを、X・Y移動機構によりXY方向に移動させ、テーブル上の所定のステージに位置決めした後、該ステージ上に載置されている対象物に近接する位置に、前記Z移動機構によりピペットを下降させて位置決めする分注動作を制御プログラムにより行なう分注装置で、該制御プログラムに前記ピペットを下降させる目標位置を設定する分注装置のティーチング方法において、
前記ピペットの接触を検知する接触センサを使用し、該ピペットを前記制御プログラムにより下降させた際に、該接触センサから検知信号が出力された時点のZ座標に基づいて、目標位置を設定することを特徴とする分注装置のティーチング方法。
【請求項2】
前記接触センサとして、ピペットに対する過負荷発生を防止する安全装置として用いられているセンサとドグを利用することを特徴とする請求項1に記載の分注装置のティーチング方法。
【請求項1】
先端にチップが装着可能で、且つ、Z移動機構によりZ方向に進退動可能なノズル部を備えたピペットが搭載されている分注ヘッドを、X・Y移動機構によりXY方向に移動させ、テーブル上の所定のステージに位置決めした後、該ステージ上に載置されている対象物に近接する位置に、前記Z移動機構によりピペットを下降させて位置決めする分注動作を制御プログラムにより行なう分注装置で、該制御プログラムに前記ピペットを下降させる目標位置を設定する分注装置のティーチング方法において、
前記ピペットの接触を検知する接触センサを使用し、該ピペットを前記制御プログラムにより下降させた際に、該接触センサから検知信号が出力された時点のZ座標に基づいて、目標位置を設定することを特徴とする分注装置のティーチング方法。
【請求項2】
前記接触センサとして、ピペットに対する過負荷発生を防止する安全装置として用いられているセンサとドグを利用することを特徴とする請求項1に記載の分注装置のティーチング方法。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2009−58299(P2009−58299A)
【公開日】平成21年3月19日(2009.3.19)
【国際特許分類】
【出願番号】特願2007−224620(P2007−224620)
【出願日】平成19年8月30日(2007.8.30)
【出願人】(000003399)JUKI株式会社 (1,557)
【Fターム(参考)】
【公開日】平成21年3月19日(2009.3.19)
【国際特許分類】
【出願日】平成19年8月30日(2007.8.30)
【出願人】(000003399)JUKI株式会社 (1,557)
【Fターム(参考)】
[ Back to top ]