
分注装置
【課題】複数のノズル装着部が装置本体に対しそれぞれ独立して移動する分注装置に、共通する1つの基準点を設ける(登録する)ことにより、例えば、容器(例えば試験管)を保持するラック(例えば試験管ラック)の位置等を登録する作業に要する手間を軽減することができ、その作業を迅速に行なうことができる分注装置を提供する。
【解決手段】分注装置1は、自動基準点登録機能を内蔵する独立2ノズル分注装置であり、第1のx軸方向移動機構、第1のy軸方向移動機構および第1のz軸方向移動機構(第1の移動機構)と、第2のx軸方向移動機構、第2のy軸方向移動機構および第2のz軸方向移動機構(第2の移動機構)とにおける、各々の動作に対する共通する1つの基準点を有する。
【解決手段】分注装置1は、自動基準点登録機能を内蔵する独立2ノズル分注装置であり、第1のx軸方向移動機構、第1のy軸方向移動機構および第1のz軸方向移動機構(第1の移動機構)と、第2のx軸方向移動機構、第2のy軸方向移動機構および第2のz軸方向移動機構(第2の移動機構)とにおける、各々の動作に対する共通する1つの基準点を有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、液体を分注する分注装置に関する。
【背景技術】
【0002】
従来、臨床検査の分野や基礎研究の分野において、例えば、検体(血清等の血液または血液成分、尿等)、試薬(薬液)等の少量の液体の仕分け、希釈、混合、滴下作業などを行う分注装置として、独立2ノズル分注装置が知られている。
【0003】
独立2ノズル分注装置は、xyz座標系において移動可能な第1の移動機構(第1のx軸方向移動機構、第1のy軸方向移動機構および第1のz軸方向移動機構)および第2の移動機構(第2のx軸方向移動機構、第2のy軸方向移動機構および第2のz軸方向移動機構)と、第1の移動機構および第2の移動機構にそれぞれ設けられた第1のノズルおよび第2のノズルとを備え、第1の移動機構および第2の移動機構をそれぞれ独立して駆動することによって、第1のノズルおよび第2のノズルをそれぞれ複数の容器間で移動させることにより、分注作業を行う(例えば、特許文献1参照)。
【0004】
この独立2ノズル分注装置では、分注の際、第1の移動機構と第2の移動機構とのそれぞれにおいて、各容器の位置を把握している必要があり、このため、各容器を保持するラックの位置を登録する作業を、第1の移動機構と第2の移動機構とのそれぞれにおいて行なっている。
【0005】
しかしながら、従来の独立2ノズル分注装置では、ラックの位置を登録する作業を、第1の移動機構と第2の移動機構とのそれぞれにおいて行なっているので、その作業に長い時間と手間とを要していた。
【0006】
【特許文献1】特開2004−117221号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
本発明の目的は、複数のノズル装着部が装置本体に対しそれぞれ独立して移動する分注装置に、共通する1つの基準点を設ける(登録する)ことにより、例えば、容器(例えば試験管)を保持するラック(例えば試験管ラック)の位置等を登録する作業に要する手間を軽減することができ、その作業を迅速に行なうことができる分注装置を提供することにある。
【課題を解決するための手段】
【0008】
このような目的は、下記(1)〜(9)の本発明により達成される。
(1) 分注する液体を収納する複数の容器が並べて配置される作業台を有する装置本体と、
液体を吸入・吐出するノズルが着脱自在に装着されるノズル装着部を有する複数の分注ヘッドと、
前記各ノズルにそれぞれ液体を吸入・吐出させるための複数の分注ポンプと、
前記各分注ヘッドをそれぞれ前記装置本体に対し水平方向であるx軸方向に移動させる複数のx軸方向移動機構と、
前記各分注ヘッドをそれぞれ前記装置本体に対し水平方向であって前記x軸方向に対し垂直なy軸方向に移動させる複数のy軸方向移動機構と、
前記各ノズルまたは前記各ノズル装着部をそれぞれ前記装置本体に対し垂直方向であるz軸方向に移動させる複数のz軸方向移動機構と、
前記各ノズルまたは前記各ノズル装着部が前記装置本体に対しそれぞれ独立して移動するように、前記各x軸方向移動機構、前記各y軸方向移動機構および前記各z軸方向移動機構を制御する移動機構制御手段とを備える分注装置であって、
前記各x軸方向移動機構、前記各y軸方向移動機構および前記各z軸方向移動機構における、各々の動作に対する共通する1つの基準点を有することを特徴とする分注装置。
【0009】
(2) 前記移動機構制御手段により、前記各x軸方向移動機構、前記各y軸方向移動機構および前記各z軸方向移動機構を制御して作動させ、前記各分注ヘッドのx軸方向移動量と、前記各分注ヘッドのy軸方向移動量と、前記各ノズルまたは前記各ノズル装着部のz軸方向移動量とを検出し、これらの検出結果に基づいて前記基準点を登録する処理を行なう基準点登録手段を有する上記(1)に記載の分注装置。
【0010】
(3) 分注する液体を収納する複数の容器が並べて配置される作業台を有する装置本体と、
液体を吸入・吐出するノズルが着脱自在に装着される第1のノズル装着部を有する第1の分注ヘッドおよび前記ノズルが着脱自在に装着される第2のノズル装着部を有する第2の分注ヘッドと、
前記第1の分注ヘッドのノズルに液体を吸入・吐出させるための第1の分注ポンプおよび前記第2の分注ヘッドのノズルに液体を吸入・吐出させるための第2の分注ポンプと、
前記第1の分注ヘッドを前記装置本体に対し水平方向であるx軸方向に移動させる第1のx軸方向移動機構および前記第2の分注ヘッドを前記x軸方向に移動させる第2のx軸方向移動機構と、
前記第1の分注ヘッドを前記装置本体に対し水平方向であって前記x軸方向に対し垂直なy軸方向に移動させる第1のy軸方向移動機構および前記第2の分注ヘッドを前記装置本体に対し前記y軸方向に移動させる第2のy軸方向移動機構と、
前記第1の分注ヘッドのノズルまたは前記第1のノズル装着部を前記装置本体に対し垂直方向であるz軸方向に移動させる第1のz軸方向移動機構および前記第2の分注ヘッドのノズルおよび前記第2のノズル装着部を前記装置本体に対し前記z軸方向に移動させる第2のz軸方向移動機構と、
前記第1の分注ヘッドのノズルまたは前記第1のノズル装着部と、前記第2の分注ヘッドのノズルまたは前記第2のノズル装着部とが前記装置本体に対しそれぞれ独立して移動するように、前記第1のx軸方向移動機構、前記第1のy軸方向移動機構、前記第1のz軸方向移動機構、前記第2のx軸方向移動機構、前記第2のy軸方向移動機構および前記第2のz軸方向移動機構を制御する移動機構制御手段とを備える分注装置であって、
前記第1のx軸方向移動機構、前記第1のy軸方向移動機構および前記第1のz軸方向移動機構と、前記第2のx軸方向移動機構、前記第2のy軸方向移動機構および前記第2のz軸方向移動機構とにおける、各々の動作に対する共通する1つの基準点を有することを特徴とする分注装置。
【0011】
(4) 前記移動機構制御手段により、前記第1のx軸方向移動機構、前記第1のy軸方向移動機構、前記第1のz軸方向移動機構、前記第2のx軸方向移動機構、前記第2のy軸方向移動機構および前記第2のz軸方向移動機構を制御して作動させ、前記第1の分注ヘッドのx軸方向移動量と、前記第1の分注ヘッドのy軸方向移動量と、前記第1の分注ヘッドのノズルまたは前記第1のノズル装着部のz軸方向移動量と、前記第2の分注ヘッドのx軸方向移動量と、前記第2の分注ヘッドのy軸方向移動量と、前記第2の分注ヘッドのノズルまたは前記第2のノズル装着部のz軸方向移動量とを検出し、これらの検出結果に基づいて前記基準点を登録する処理を行なう基準点登録手段を有する上記(3)に記載の分注装置。
【0012】
(5) 前記基準点登録手段は、前記第1の分注ヘッドのノズルまたは前記第1のノズル装着部が第1の原点から前記基準点に移動し、かつ、前記第2の分注ヘッドのノズルまたは前記第2のノズル装着部が第2の原点から前記基準点に移動したときの、前記第1の分注ヘッドのx軸方向移動量と、前記第1の分注ヘッドのy軸方向移動量と、前記第1の分注ヘッドのノズルまたは前記第1のノズル装着部のz軸方向移動量と、前記第2の分注ヘッドのx軸方向移動量と、前記第2の分注ヘッドのy軸方向移動量と、前記第2の分注ヘッドのノズルまたは前記第2のノズル装着部のz軸方向移動量とを求め、これらの移動量に基づいて前記基準点を登録する上記(4)に記載の分注装置。
【0013】
(6) 前記基準点登録手段は、前記基準点と同じx座標上における前記第1の分注ヘッドの有無を検出する第1のx軸方向検出手段と、
前記基準点と同じx座標上における前記第2の分注ヘッドの有無を検出する第2のx軸方向検出手段と、
前記基準点と同じy座標上における前記第1の分注ヘッドの有無と、前記基準点と同じz座標上における前記第1の分注ヘッドのノズルまたは前記第1のノズル装着部の有無と、前記基準点と同じy座標上における前記第2の分注ヘッドの有無と、前記基準点と同じz座標上における前記第2の分注ヘッドのノズルまたは前記第2のノズル装着部の有無とを検出するyz軸方向検出手段とを備え、
前記基準点登録手段は、前記第1の分注ヘッドのノズルまたは前記第1のノズル装着部が第1の原点から前記基準点に移動し、かつ、前記第2の分注ヘッドのノズルまたは前記第2のノズル装着部が第2の原点から前記基準点に移動したときの、前記第1の分注ヘッドのx軸方向移動量と、前記第1の分注ヘッドのy軸方向移動量と、前記第1の分注ヘッドのノズルまたは前記第1のノズル装着部のz軸方向移動量と、前記第2の分注ヘッドのx軸方向移動量と、前記第2の分注ヘッドのy軸方向移動量と、前記第2の分注ヘッドのノズルまたは前記第2のノズル装着部のz軸方向移動量とを求め、これらの移動量に基づいて前記基準点を登録する上記(4)に記載の分注装置。
【0014】
(7) 前記第1のx軸方向検出手段は、前記第1の分注ヘッドに設置され、前記第2のx軸方向検出手段は、前記第2の分注ヘッドに設置され、前記yz軸方向検出手段は、前記作業台に設置される上記(6)に記載の分注装置。
【0015】
(8) 前記yz軸方向検出手段は、着脱自在である上記(6)または(7)に記載の分注装置。
【0016】
(9) 前記基準点登録手段は、x軸に平行に前記装置本体に設置され、切欠き部を有するx軸プレートを備え、
前記第1のx軸方向検出手段および前記第2のx軸方向検出手段は、それぞれ、前記x軸プレートの切欠き部の有無により、前記基準点と同じx座標上における前記第1の分注ヘッドの有無および前記第2の分注ヘッドの有無を検出し、前記yz軸方向検出手段は、前記第1の分注ヘッドのノズルまたは前記第1のノズル装着部と、前記第2の分注ヘッドのノズルまたは前記第2のノズル装着部とを検出する上記(6)ないし(8)のいずれかに記載の分注装置。
【発明の効果】
【0017】
本発明によれば、共通する1つの基準点を有しているので、例えば、容器を保持するラックの位置等を登録する作業に要する手間を軽減することができ、その作業を迅速に行なうことができる。
【0018】
すなわち、例えば、複数の移動機構(x軸方向移動機構、y軸方向移動機構およびz軸方向移動機構)のうちのいずれか1つについて、前記ラックの位置を登録する作業を行なえば、その他の移動機構においては、前記基準点と、前記1つの移動機構について登録されたラックの位置とに基づいて、それぞれの移動機構についてのラックの位置を求めることができる。
【0019】
また、共通する1つの基準点を登録する処理を行なう基準点登録手段を有する場合は、前記基準点を自動的に登録することができ、その基準点の登録を容易、迅速、正確かつ確実に行なうことができる。すなわち、例えば、共通する1つの基準点の登録を作業者が手動で行なう場合は、熟練が必要であるが、本発明では、前記基準点の登録を手動で行なう場合に比べ、各移動機構の動作精度を向上させることができる。従って、各ノズルまたは各ノズル装着部の移動精度を向上させることができる。
【発明を実施するための最良の形態】
【0020】
以下、本発明の分注装置を添付図面に示す好適な実施形態に基づいて詳細に説明する。
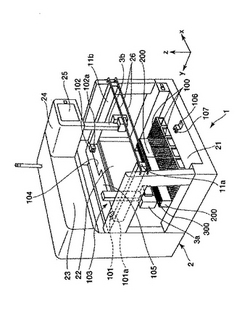
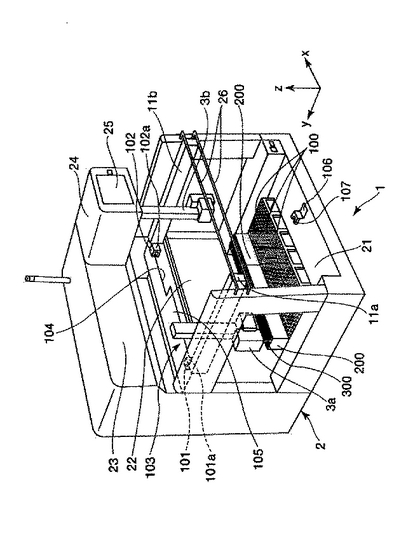
図1は、本発明の分注装置の実施形態を示す斜視図である。なお、以下では、説明の都合上、水平方向であって分注装置の横方向(左右方向)をx軸方向、水平方向であって前記x軸方向に対し垂直な方向(分注装置の前後方向)をy軸方向、x軸およびy軸に対して垂直方向(上下方向)をz軸方向と言い、図示のようにxyz座標系を想定する。また、図1では、分注ヘッド、アーム等の細部を省略して図示する。
【0021】
図1に示す分注装置1は、自動基準点登録機能を内蔵する独立2ノズル分注装置1であり、装置本体2と、該装置本体2に対しそれぞれ移動可能に設置された第1の分注ヘッド3aおよび第2の分注ヘッド3bの2つの分注ヘッドとを備えている。この分注装置1は、患者から採取した血液または血清等の血液成分、尿等の液体状の親検体(元検体)を分注して小分けにする(取り分ける)ことにより、検査用の子検体を作成する装置である。
【0022】
装置本体2は、作業台21と、作業台21の後ろ側に立設された第1の機器収納部22と、第1の機器収納部22の上方に設けられた第2の機器収納部23と、第2の機器収納部23の右側の部分から前方に突出する突出部24とを有している。
【0023】
作業台21上には、検体(液体)を収納する例えば試験管のような容器が複数並べて配置(載置)される。本実施形態では、作業台21上には、複数の試験管を立てた状態で行列状に保持する試験管ラック(ラック)100が複数載置可能になっている。そして、親検体を収納した試験管や、子検体を収納する試験管は、それぞれ、試験管ラック100に保持される。
【0024】
また、作業台21上における試験管ラック100の後方には、チップラック200が載置可能になっている。チップラック200は、ディスポーザブル(使い捨て)のノズルチップ(ノズル)300を立てた状態で行列状に複数並べて保持し得るようになっている。
【0025】
装置本体2には、第1の分注ヘッド3aを支持する第1のアーム11aと、第2の分注ヘッド3bを支持する第2のアーム11bとが設置されている。第1のアーム11aおよび第2のアーム11bは、それぞれ、その長手方向がy軸方向となる姿勢で配置され、その後端部は、第1の機器収納部22に支持されている。第1の機器収納部22には、図2で後述する第1のx軸方向移動機構4aおよび第2のx軸方向移動機構4bが設けられており、これらの作動により、第1のアーム11a(第1の分注ヘッド3a)および第2のアーム11b(第2の分注ヘッド3b)は、それぞれ独立して、装置本体2に対しx軸方向に移動する。
【0026】
また、第1のアーム11aの後端面には、凹部に、対向して設けられた第1アーム用x軸フォトセンサ101(第1のx軸方向検出手段)がブラケット101aを介して取り付けられており、第2のアーム11bの後端面には、凹部に、対向して設けられた第2アーム用x軸フォトセンサ102(第2のx軸方向検出手段)がブラケット102aを介して取り付けられている。第1アーム用x軸フォトセンサ101は、第1のアーム11aに取り付けられた図3で後述する第1のノズル装着部32aの中心軸とx軸方向の位置が同一の位置に配置されており、同様に、第2アーム用x軸フォトセンサ102は、第2のアーム11bに取り付けられた第2のノズル装着部32b(図5)の中心軸とx軸方向の位置が同一の位置に配置されている。
【0027】
第1アーム用x軸フォトセンサ101および第2アーム用x軸フォトセンサ102は、凹部を介して光を投光および受光する図示しない投光部および受光部を有し、凹部に物体が介在して投光部の光が遮られることにより、受光部が光を受光しないときに検出状態(ON状態)となり、凹部に物体が介在せずに受光部が投光部の光を受光するときが非検出状態(OFF状態)となる。
【0028】
装置本体2において、第1の機器収納部22の上方には、xy平面に水平な平面板状のx軸プレート103がx軸(x軸方向)に平行に取り付けられている。x軸プレート103は、装置本体2のx軸方向中心(x軸方向中間点)から右側に切欠き部104が形成され、装置本体2のx軸方向中心から左側に凸部105が形成された平面視略L字型の形状をしており、凸部105が第1アーム用x軸フォトセンサ101および第2アーム用x軸フォトセンサ102の凹部に介在し、切欠き部104が第1アーム用x軸フォトセンサ101および第2アーム用x軸フォトセンサ102の凹部に介在しないように装置本体2に配置されている。
【0029】
すなわち、第1のアーム11aおよび第2のアーム11bがx軸方向を、装置本体2のx軸方向中心から左側、すなわち凸部105の有る部分を移動するときは、第1アーム用x軸フォトセンサ101および第2アーム用x軸フォトセンサ102の凹部にx軸プレート103の凸部105が介在し、第1アーム用x軸フォトセンサ101および第2アーム用x軸フォトセンサ102はON状態となり、一方、第1のアーム11aおよび第2のアーム11bが、装置本体2のx軸方向中心から右側を移動するときは、第1アーム用x軸フォトセンサ101および第2アーム用x軸フォトセンサ102はOFF状態となる。
【0030】
このようにして、第1アーム用x軸フォトセンサ101および第2アーム用x軸フォトセンサ102により、切欠き部104と凸部105との境界を検出することができる。
【0031】
なお、x軸プレート103の切欠き部104の形成位置、すなわち、切欠き部104と凸部105との境界の位置は、上述のものに限るものではない。
【0032】
また、作業台21上の前縁近傍で、かつ試験管ラック100の前方であって装置本体2のx軸方向中心には、断面が略L字型の治具106を取り付け、この治具106の上端に凹部を設け、この凹部にyz軸フォトセンサ(yz軸方向検出手段)107の発光部と受光部が対向するように設けられている。このyz軸フォトセンサ107の位置は、後述する基準点位置Bと一致している。また、yz軸フォトセンサ107は、治具106と一体的に着脱し得るようになっている。
【0033】
なお、前記yz軸フォトセンサ107は、例えば、作業台21に埋め込まれていてもよい。
【0034】
第1の分注ヘッド3aおよび第2の分注ヘッド3bは、それぞれ、第1のアーム11aおよび第2のアーム11bの長手方向、すなわちy軸方向に沿って移動可能に支持されている。第1の分注ヘッド3aおよび第2の分注ヘッド3bは、それぞれ独立して、装置本体2に対しy軸方向に移動する。その移動機構の動作は、図3、図4を用いて後述する。
【0035】
第1の分注ヘッド3aが移動可能な範囲(領域)と、第2の分注ヘッド3bが移動可能な範囲(領域)とは、全部または一部において重なっている。第1の分注ヘッド3aおよび第2の分注ヘッド3bは、図4で後述する制御手段13により、互いに接触(衝突)しないようにその移動がそれぞれ制御されている。
【0036】
装置本体2の突出部24は、第1の分注ヘッド3aおよび第2の分注ヘッド3bが移動する作業空間(作業領域)の上方に位置している。突出部24の前面には、表示部および操作部(入力部)として、タッチパネル25が設置されている。タッチパネル25には、例えば各種条件を設定する入力画面等が表示され、操作者(作業者)は、タッチパネル25に指で触れることにより、分注装置1の各種条件の設定等を行う。また、タッチパネル25には、例えば分注装置1の状態、エラーの発生等の情報も表示される。
【0037】
また、装置本体2には、第1のアーム11aおよび第2のアーム11bの前方に位置する2本のガードバー26が設置されている。これにより、移動する第1のアーム11aおよび第2のアーム11bに操作者が衝突するのを防止することができる。
【0038】
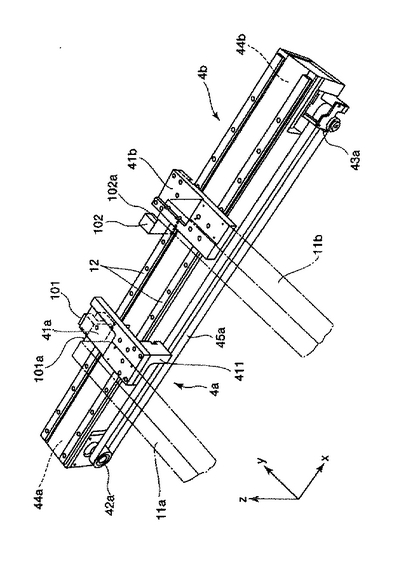
図2は、図1に示す分注装置における第1のx軸方向移動機構および第2のx軸方向移動機構を示す斜視図である。
【0039】
図2に示すように、第1のx軸方向移動機構4aは、第1の機器収納部22に設置されたガイドレール12の案内によりx軸方向に沿って移動可能に設置されたスライドブロック(移動体)41aと、ガイドレール12の両端付近にそれぞれ設置された駆動プーリー(ベルト車)42aおよび従動プーリー(ベルト車)43aと、駆動プーリー42aを回転駆動するパルスモーター(ステッピングモーター)44aと、駆動プーリー42aと従動プーリー43aとの間に張架されたベルト45aとを有している。
【0040】
スライドブロック41aは、突出形成された固定部411にてベルト45aの一部に固定されている。スライドブロック41aには、第1のアーム11aの後端部が固定されている。
【0041】
パルスモーター44aが駆動プーリー42aを回転駆動すると、ベルト45aが回転し、ベルト45aに牽引されてスライドブロック41aがx軸方向に移動する。これに伴って、第1のアーム11aもx軸方向に移動する。スライドブロック41aおよび第1のアーム11aは、パルスモーター44aの正転/逆転の切り換えにより、装置本体2に対し右方向または左方向に移動する。
【0042】
ベルト45aは、駆動プーリー42aおよび従動プーリー43aの外周面に形成された歯と噛み合う歯を有する歯付きベルトで構成されており、駆動プーリー42aおよび従動プーリー43aに対し滑りを生じないようになっている。
【0043】
ガイドレール12には、第2のx軸方向移動機構4bのスライドブロック(移動体)41bがさらに設置され、このスライドブロック41bには、第2のアーム11bの後端部が固定されている。
【0044】
第2のx軸方向移動機構4bは、第1のx軸方向移動機構4aと同様の構成になっており、ガイドレール12において後方に設けられ、図2中では見えていない駆動プーリー、従動プーリーおよびベルトと、該駆動プーリーを回転駆動するパルスモーター(ステッピングモーター)44bとを有し、スライドブロック41bは、該ベルトの一部に固定されている。スライドブロック41bには、第2のアーム11bの後端部が固定されており、パルスモーター44bが回転すると、第2のアーム11bがx軸方向に移動する。
【0045】
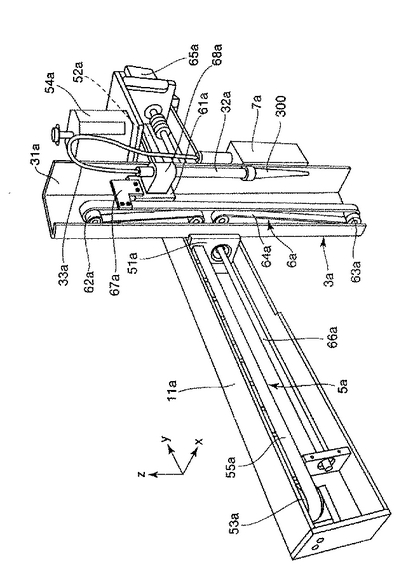
図3は、図1に示す分注装置における第1のy軸方向移動機構、第1のz軸方向移動機構および第1の分注ヘッドを示す斜視図である。なお、図3に示す分注ヘッドは、内部構造が見えるように、外装のカバーを取り外した状態になっている。
【0046】
図3に示すように、第1のy軸方向移動機構5aは、図示しないガイドレールの案内により第1のアーム11aの長手方向に沿って移動可能に設置されたスライドブロック51aと、第1のアーム11aの後端付近に設置された駆動プーリー52aと、第1のアーム11aの前端付近に設置された従動プーリー53aと、第1のアーム11aの後端付近に設置され、駆動プーリー52aを回転駆動するパルスモーター54aと、駆動プーリー52aと従動プーリー53aとの間に張架されたベルト55aとを有している。
【0047】
スライドブロック51aは、ベルト55aの一部に固定されている。スライドブロック51aには、第1の分注ヘッド3aのフレーム31aが固定されている。
【0048】
パルスモーター54aが駆動プーリー52aを回転駆動すると、ベルト55aが回転し、ベルト55aに牽引されてスライドブロック51aが第1のアーム11aの長手方向すなわちy軸方向に移動する。これに伴って、第1の分注ヘッド3aも、y軸方向に移動する。スライドブロック51aおよび第1の分注ヘッド3aは、パルスモーター54aの正転/逆転の切り換えにより、装置本体2に対し前方または後方に移動する。
【0049】
ベルト55aは、駆動プーリー52aおよび従動プーリー53aの外周面に形成された歯と噛み合う歯を有する歯付きベルトで構成されており、駆動プーリー52aおよび従動プーリー53aに対し滑りを生じないようになっている。
【0050】
なお、第2のy軸方向移動機構5bは、第1のy軸方向移動機構5aと左右対称であること以外は同様の構成であるので、説明および図示を省略する。
【0051】
図3に示すように、第1の分注ヘッド3aは、z軸方向に長い部材で構成された骨格をなすフレーム31aと、ノズルチップ300を装着可能な第1のノズル装着部32aとを有している。
【0052】
第1のノズル装着部32aは、その内部に通気流路が形成されたほぼ管状の部材で構成されている。第1のノズル装着部32aの構成材料は、例えばステンレス鋼、アルミニウムまたはアルミニウム合金、銅または銅系合金等の各種金属材料であるのが好ましい。
【0053】
ノズルチップ300は、その基端開口(上端開口)に、第1のノズル装着部32aの下端部が嵌挿されることにより、第1のノズル装着部32aに着脱自在に装着される。ノズルチップ300の構成材料としては、各種合成樹脂材料が挙げられる。また、ノズルチップ300は、半透明または透明であって光透過性を有しているのが好ましい。
【0054】
第1の分注ヘッド3aのフレーム31aには、第1のノズル装着部32aに装着されたノズルチップ300内の圧力を増減させることによりノズルチップ300に液体を吸入させ、またはノズルチップ300から液体を吐出させるための第1の分注ポンプ7aが設置されている。第1の分注ポンプ7aは、気体(空気)を吸入・吐出する例えばシリンジポンプ(ピストンポンプ)で構成されている。この第1の分注ポンプ7aは、ノズルチップ300内の圧力を減少させることにより、ノズルチップ300に液体を吸入させ、ノズルチップ300内の圧力を増大させることにより、吸入した液体をノズルチップ300から吐出させる。第1の分注ポンプ7aと、第1のノズル装着部32aとは、可撓性を有する配管チューブ33aで接続されており、互いの内部空間が連通されている。
【0055】
また、第1の分注ヘッド3aのフレーム31aには、第1の分注ポンプ7aのプランジャ(ピストン)を移動させる第1のポンプ駆動機構14aが設置されている(図4参照)。第1のポンプ駆動機構14aは、例えば、ボールねじ(送りねじ)機構(図示せず)とこれを駆動するパルスモーター(図示せず)とを有しており、これらにより第1の分注ポンプ7aのプランジャを移動させるようになっている。
【0056】
第1のノズル装着部32aは、フレーム31aに対しz軸方向に移動可能に設置されており、第1のz軸方向移動機構6aの作動により、装置本体2に対しz軸方向に移動(昇降)する。
【0057】
第1のz軸方向移動機構6aは、フレーム31aに対し図示しないガイドレールの案内によりz軸方向に沿って移動可能に設置されたスライドブロック(移動体)61aと、フレーム31aの上端付近および下端付近にそれぞれ設置された従動プーリー(ベルト車)62aおよび63aと、ベルト64aとを有している。
【0058】
スライドブロック61aは、固定部材67aを介して、ベルト64aの一部に固定されている。スライドブロック61aには、支持部68aを介して、第1のノズル装着部32aが固定されている。
【0059】
スライドブロック51aの内部には、ベルト64aを駆動する駆動プーリー(図示せず)が設置されており、ベルト64aは、従動プーリー62aと63aとの間に張架されると共に、その中間の部分においてスライドブロック51a内に引き込まれ、この駆動プーリーにも張架されている。
【0060】
スライドブロック51a内の駆動プーリーは、第1のアーム11aの後端付近に設置されたパルスモーター(ステッピングモーター)65a(図3)により回転駆動される。すなわち、第1のアーム11aには、第1のアーム11aの長手方向に沿って延びるプロペラシャフト66aが回転可能に設置されており、パルスモーター65aの出力軸は、このプロペラシャフト66aに接続されている。プロペラシャフト66aは、スライドブロック51aおよびその内部の駆動プーリーを貫通しており、スライドブロック51aは、プロペラシャフト66aを挿通した状態でy軸方向に移動する。スライドブロック51a内の駆動プーリーは、スライドブロック51aのプロペラシャフト66aに対する位置によらず、プロペラシャフト66aと共に回転するようになっている。
【0061】
パルスモーター65aがプロペラシャフト66aを介してスライドブロック51a内の駆動プーリーを回転駆動すると、ベルト64aが回転し、ベルト64aに牽引されて、スライドブロック61aがz軸方向に移動する。これに伴って、第1のノズル装着部32aおよびノズルチップ300も、z軸方向に移動(昇降)する。第1のノズル装着部32aおよびノズルチップ300は、パルスモーター65aの正転/逆転の切り換えにより、上昇または下降する。
【0062】
このように、第1のノズル装着部32aに装着されたノズルチップ300またはノズルチップ300が装着されていない第1のノズル装着部32aは、第1のアーム11aの第1のx軸方向移動機構4aによってx軸方向に移動され、第1の分注ヘッド3aの第1のy軸方向移動機構5aによってy軸方向に移動され、第1の分注ヘッド3aの第1のz軸方向移動機構6aによってz軸方向に移動される。そして、yz軸フォトセンサ107の凹部にノズルチップ300または第1のノズル装着部32aが位置するとき(収容されているとき)は、yz軸フォトセンサ107はON状態となり、一方、yz軸フォトセンサ107の凹部にノズルチップ300または第1のノズル装着部32aが位置していないときは、yz軸フォトセンサ107はOFF状態となる。
【0063】
このようにして、yz軸フォトセンサ107により、第1のノズル装着部32aに装着されたノズルチップ300または第1のノズル装着部32aと、第2のノズル装着部32bに装着されたノズルチップ300または第2のノズル装着部32bとを検出することができる。すなわち、yz軸フォトセンサ107により、後述する基準点と同じy座標上における第1の分注ヘッド3aの有無と、基準点と同じz座標上における第1のノズル装着部32aに装着されたノズルチップ300または第1のノズル装着部32aの有無と、基準点と同じy座標上における第2の分注ヘッド3bの有無と、基準点と同じz座標上における第2のノズル装着部32bに装着されたノズルチップ300または第2のノズル装着部32bの有無とを検出することができる。
【0064】
なお、本実施形態では、代表的に、yz軸フォトセンサ107により、第1のノズル装着部32aを検出するよう構成した場合について説明する。
【0065】
このような第1の分注ヘッド3aの基本的な動作は、次のようなものである(第2の分注ヘッド3bについても同様)。まず、第1のノズル装着部32aを下降させて吸入先の容器内にノズルチップ300を挿入し、この状態で第1の分注ポンプ7aを作動してノズルチップ300内の圧力を減少させることにより、ノズルチップ300内に液体を吸入する。次いで、ノズルチップ300を上昇させてから吐出先の容器の位置に第1の分注ヘッド3aを移動させる。次いで、ノズルチップ300を吐出先容器内に下降させ、第1の分注ポンプ7aを作動してノズルチップ300内の圧力を増大させることにより、吸入した液体を吐出する。
【0066】
続いて異なる検体を分注する場合には、コンタミネーションを防止するため、次のようにしてノズルチップ300を交換する。使用済みノズルチップ300の取り外しは、第1の分注ヘッド3aを装置本体2に設置されたチップリムーバ(図示せず)の位置に移動させて行う。チップリムーバは、第1のノズル装着部32aが挿入可能な切欠きを有する板状の部材であり、この切欠きに第1のノズル装着部32aを挿入して第1のノズル装着部32aを上昇させると、ノズルチップ300の上端がチップリムーバの下面に当接することにより、ノズルチップ300が第1のノズル装着部32aから離脱する。次いで、第1の分注ヘッド3aをチップラック200の上方に移動させ、第1のノズル装着部32aを下降させることにより、新しいノズルチップ300が第1のノズル装着部32aに装着される。
【0067】
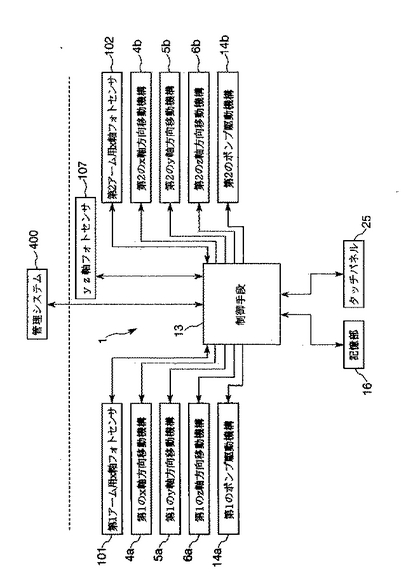
図4は、図1に示す分注装置の概略的なブロック図である。図4に示すように、分注装置1は、前述したような分注装置1の各部がそれぞれ接続された制御手段13を備えている。また、制御手段13には、さらに、記憶部(記憶手段)16が接続されている。この制御手段13は、CPU(Central Processing Unit)と、シーケンサとを有し、ソフト的およびハード的に構成されている。
【0068】
記憶部16は、プログラムやデータ等を記憶する、制御手段13に読み取り可能な記憶媒体を有している。この記憶媒体は、例えば、RAM、FD、HD、CD−ROM等で構成されている。この記憶媒体には、分注装置1の動作を実行するための各種プログラムおよび各種データが予め記憶されている。また、各プログラムで処理されたデータおよび制御手段13に接続された各部からの入力データ等が記憶される。
【0069】
制御手段13は、記憶部16に記憶された各種プログラムおよびデータを必要に応じて読み出し、そのプログラムおよびデータに基づいて、分注装置1の各部の作動を制御する。
【0070】
なお、制御手段13は、シーケンサを有さずにすべてソフト的に構成されていてもよく、または、シーケンサのみを用いてすべてをシーケンス制御で行うようにハード的に構成されていてもよい。
【0071】
制御手段13は、第1のx軸方向移動機構4a、第1のy軸方向移動機構5a、第1のz軸方向移動機構6a、第2のx軸方向移動機構4b、第2のy軸方向移動機構5bおよび第2のz軸方向移動機構6bの作動を、それぞれ、オープンループ制御により制御する。
【0072】
記憶部16には、各移動機構4a、5a、6a、4b、5bおよび6bの各パルスモーターに対する、所定の原点位置が記憶されている。
【0073】
本実施形態においては、第1のx軸方向移動機構4a、第1のy軸方向移動機構5aおよび第1のz軸方向移動機構6aで構成される第1の移動機構(各パルスモーター44a、54aおよび65a)の原点位置P1(図5(a)、図5(b)参照)は、装置本体2においてそれぞれ、第1のアーム11aがx軸方向に最も左側に移動した位置、第1の分注ヘッド3aがy軸方向に最も奥側に移動した位置および第1のノズル装着部32aがz軸方向に最も上側に移動した位置である。すなわち、第1のアーム11aの第1のノズル装着部32aの原点(第1の原点)位置は、原点位置P1となる。
【0074】
また、本実施形態においては、第2のx軸方向移動機構4b、第2のy軸方向移動機構5bおよび第2のz軸方向移動機構6bで構成される第2の移動機構(各パルスモーター)の原点位置P2(図5(a)、図5(b)参照)は、装置本体2においてそれぞれ、第2のアーム11bがx軸方向に最も右側に移動した位置、第2の分注ヘッド3bがy軸方向に最も奥側に移動した位置および第2のノズル装着部32bがz軸方向に最も上側に移動した位置である。すなわち、第2のアーム11bの第2のノズル装着部32bの原点(第2の原点)位置は、原点位置P2となる。
【0075】
記憶部16には、さらに、図6および図7で後述する基準点登録処理によって登録される、各移動機構4a、5a、6a、4b、5bおよび6b(各パルスモーター)に対する共通する1つの基準点位置(基準点)B(図5(a)、図5(b)参照)が記憶されている。すなわち、第1のアーム11aの第1のノズル装着部32aの基準点位置と、第2のアーム11bの第2のノズル装着部32bの基準点位置とは、共通する1つの基準点位置Bとなり、したがって、第1のノズル装着部32aおよび第2のノズル装着部32bは、共通する1つの基準点位置Bを有する。
【0076】
制御手段13は、各移動機構の各パルスモーターに対する、第1の原点位置(原点位置)P1、第2の原点位置(原点位置)P2や基準点位置Bからの駆動パルス数を監視することにより、第1の分注ヘッド3aおよび第2の分注ヘッド3bの位置や、第1および第2のノズル装着部32a、32bの高さをそれぞれ把握している。
【0077】
また、制御手段13は、第1のx軸方向移動機構4a、第1のy軸方向移動機構5aおよび第1のz軸方向移動機構6aにおける特定の位置に関する情報と、前記基準点とに基づいて、第2のx軸方向移動機構4b、第2のy軸方向移動機構5bおよび第2のz軸方向移動機構6bにおける前記特定の位置を求めることができ、第2の分注ヘッド3bの第2のノズル装着部32bを前記特定の位置に移動させることができる。同様に、制御手段13は、第2のx軸方向移動機構4b、第2のy軸方向移動機構5bおよび第2のz軸方向移動機構6bにおける特定の位置に関する情報と、前記基準点とに基づいて、第1のx軸方向移動機構4a、第1のy軸方向移動機構5aおよび第1のz軸方向移動機構6aにおける前記特定の位置を求めることができ、第1の分注ヘッド3aの第1のノズル装着部32aを前記特定の位置に移動させることができる。したがって、この分注装置1では、前記特定の位置を登録する処理は、第1のx軸方向移動機構4a、第1のy軸方向移動機構5aおよび第1のz軸方向移動機構6aと、第2のx軸方向移動機構4b、第2のy軸方向移動機構5bおよび第2のz軸方向移動機構6bとのいずれか一方で行なえばよい。
【0078】
なお、前述した構成に限らず、各移動機構をクローズドループ制御により制御するようにしてもよい。
【0079】
制御手段13は、第1の分注ヘッド3aの第1のノズル装着部32aと、第2の分注ヘッド3bの第2のノズル装着部32bとが、それぞれ独立して、x、y、z軸方向に移動するように制御する。
【0080】
また、制御手段13は、第1のポンプ駆動機構14a、第2のポンプ駆動機構14bの各パルスモーターの作動をそれぞれ制御することにより、第1の分注ヘッド3a、第2の分注ヘッド3bによる液体吸入量および液体吐出量をそれぞれ個別に制御する。
【0081】
また、制御手段13は、検体処理システムの全体を管理する管理システム(ホストコンピュータ)400に接続されている。制御手段13は、管理システム400から取得した各親検体毎の分注情報に基づき、各部の作動を制御して分注作業を行う。そして、制御手段13は、例えば分注先の位置情報等を管理システム400に報告する。
【0082】
このような分注装置1では、第1の分注ヘッド3aの第1のノズル装着部32aと、第2の分注ヘッド3bの第2のノズル装着部32bとが、それぞれ独立して、x、y、z軸方向に移動することができるので、分注動作の自由度が高い。すなわち、第1、2のノズル装着部32a、32b(両ノズルチップ300)をそれぞれランダムに作動させることも可能であり、両者を効率良くフルに活用して分注作業を行うことができる。よって、多数の検体を処理する場合でも、処理効率が高く、短時間で大量の検体を処理することができる。
【0083】
さらに、第1の分注ヘッド3aと第2の分注ヘッド3bとが同種の液体を分注する用途だけでなく、例えば、第1の分注ヘッド3aで分注した子検体に、第2の分注ヘッド3bで試薬(薬液)を分注する、というように、第1の分注ヘッド3aと第2の分注ヘッド3bとが異種の液体を分注するような用途にも好適に使用することができる。このように、分注装置1では、制御手段13の制御の仕方によって、多様な分注動作を高い効率で行うことができる。
【0084】
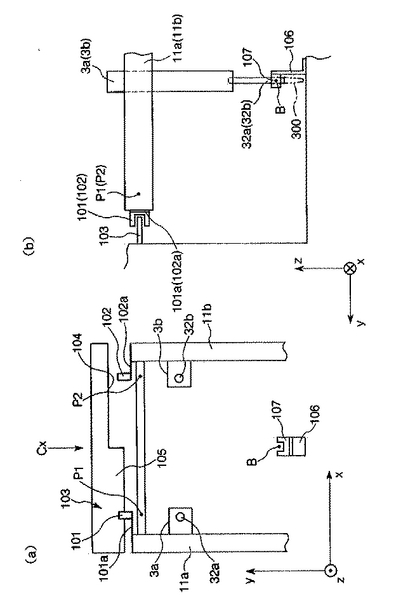
図5は、図1に示す分注装置の備える基準点登録装置の概略構成を示す図であり、図5(a)は上面図であり、図5(b)は左側側面図である。
【0085】
第1アーム用x軸フォトセンサ101、第2アーム用x軸フォトセンサ102、x軸プレート103、yz軸フォトセンサ107および制御手段13は、基準点登録手段を構成する。
【0086】
上述のように、第1のアーム11aがx軸中心位置Cxから左側を移動するときは、第1のアーム11aに取り付けられた第1アーム用x軸フォトセンサ101にx軸プレート103の凸部105が介在し、ON状態となる。同様に、第2のアーム11bがx軸中心位置Cxから左側を移動するときは、第2のアーム11bに取り付けられた第2アーム用x軸フォトセンサ102にx軸プレート103の凸部105が介在し、ON状態となる。
【0087】
一方、第1アーム用x軸フォトセンサ101は、第1のアーム11aがx軸中心位置Cxから右側を移動するときは、x軸プレート103には切欠き部104が形成されているので、OFF状態となる。同様に、第2アーム用x軸フォトセンサ102は、第2のアーム11bがx軸中心位置Cxから右側を移動するときは、x軸プレート103には切欠き部104が形成されているので、OFF状態となる。
【0088】
なお、第1アーム用x軸フォトセンサ101は、第1のノズル装着部32aの中心軸がx軸上におけるx軸プレート103の切欠き部104と凸部105の境界位置で、ON状態とOFF状態とが切り換わる。同様に、第2アーム用x軸フォトセンサ102は、第2のノズル装着部32bの中心軸がx軸上におけるx軸プレート103の切欠き部104と凸部105の境界位置で、ON状態とOFF状態とが切り換わる。
【0089】
また、上述したように、第1のアーム11aがx軸方向に移動し、第1の分注ヘッド3aの第1のノズル装着部32aの中心軸がx軸中心位置Cxに位置し、第1のノズル装着部32aがz軸方向に最も下側に移動した状態において、第1の分注ヘッド3aがy軸方向に前側に移動して第1のノズル装着部32aが作業台21上に取り付けられたyz軸フォトセンサ107の凹部に位置する(収容される)と、yz軸フォトセンサ107はON状態になる(図5(b)参照)。
【0090】
同様に、第2のアーム11bがx軸方向に移動し、第2の分注ヘッド3bの第2のノズル装着部32bの中心軸がx軸上でx軸方向中心位置Cxに位置する状態であって、第2のノズル装着部32bがz軸方向に最も下側に移動した状態において、第2の分注ヘッド3bがy軸方向に前側に移動して第2のノズル装着部32bが作業台21上に取り付けられたyz軸フォトセンサ107の凹部に位置すると、yz軸フォトセンサ107はON状態になる(図5(b)参照)。
【0091】
次いで、分注装置1の基準点登録装置による基準点を登録する処理(基準点登録処理)について説明する。
【0092】
本実施形態では、第1のノズル装着部32aおよび第2のノズル装着部32bにそれぞれノズルチップ300を装着しない状態で、基準点登録処理を行なう。そして、この基準点登録処理では、第1の分注ヘッド3a第1のノズル装着部32aが原点位置P1から基準点位置Bに移動し、かつ、第2の分注ヘッド3bの第2のノズル装着部32bが原点位置P2から基準点位置Bに移動したときの第1のアーム11aのx軸方向の移動量と、第1の分注ヘッド3aのy軸方向の移動量と、第1のノズル装着部32aのz軸方向の移動量と、第2のアーム11bのx軸方向の移動量と、第2の分注ヘッド3bのy軸方向の移動量と、第2のノズル装着部32bのz軸方向の移動量とを求め、これらの移動量に基づいて、共通する1つの基準点を登録する。以下、フローチャートに基づいて説明する。
【0093】
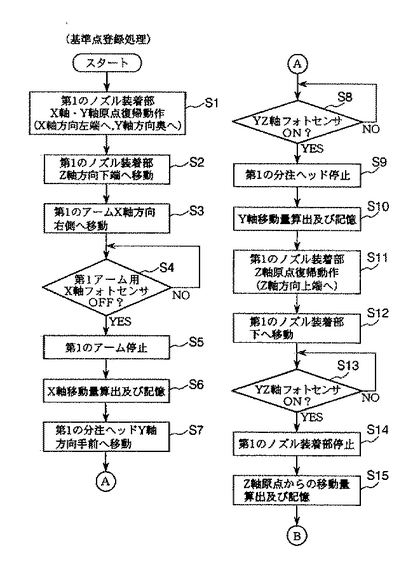
図6および図7は、図1に示す分注装置の備える基準点登録装置によって実行される基準点登録処理のフローチャートである。
【0094】
本基準点登録処理は、タッチパネル25に表示される操作ボタンを操作して基準点登録開始が選択されることにより実行される。
【0095】
まず、第1のノズル装着部32aの基準点登録が実行される。第1のアーム11a(第1のノズル装着部32a)がx軸方向をその動作範囲内の左端へ、第1の分注ヘッド3a(第1のノズル装着部32a)がy軸方向をその動作範囲内の後端へ、すなわちx軸、y軸の原点位置P1に移動して、x軸、y軸原点復帰処理を実行し(ステップS1)、第1のノズル装着部32aがz軸方向をその動作範囲内の下端へ移動する(ステップS2)。次いで、第1のアーム11aがx軸方向を右側に移動し(ステップS3)、第1アーム用x軸フォトセンサ101がOFF状態になったか否かを判別する(ステップS4)。ステップS4の判別は第1アーム用x軸フォトセンサ101がOFF状態になったと判別するまで実行する。
【0096】
ステップS4において、第1アーム用x軸フォトセンサ101がOFF状態になったと判別すると、第1のアーム11aの移動を停止する(ステップS5)。これにより、第1のノズル装着部32aがx軸上をx軸方向中心位置Cxに位置することになる。
【0097】
次いで、第1のアーム11aの原点位置P1からのx軸方向の移動量を算出し、この算出移動量を記憶部16に記憶する(ステップS6)。これにより第1のノズル装着部32aのx軸基準点位置が登録される。
【0098】
次いで第1のノズル装着部32aのy軸基準点位置の登録処理を開始する。
まず、第1のアーム11aがステップS5で停止した位置において、第1の分注ヘッド3aがy軸方向を手前に移動し(ステップS7)、yz軸フォトセンサ107がON状態になったか否かを判別する(ステップS8)。ステップS8の判別はyz軸フォトセンサ107がON状態になるまで実行される。
【0099】
yz軸フォトセンサ107がON状態になったと判別すると、第1の分注ヘッド3aの移動を停止する(ステップS9)。
【0100】
次いで、第1の分注ヘッド3aの原点位置P1からのy軸方向の移動量を算出し、この算出移動量を記憶部16に記憶する(ステップS10)。これにより第1のノズル装着部32aのy軸基準点位置が登録される。
【0101】
次いで、第1のノズル装着部32aのz軸基準点位置の登録処理を開始する。
まず、第1の分注ヘッド3aがステップS9で停止した位置において、第1のノズル装着部32aをz軸方向にその動作範囲内の上端へ移動してz軸原点復帰処理を行う(ステップS11)。次いで、第1のノズル装着部32aをz軸下方向へ移動し(ステップS12)、yz軸フォトセンサ107がON状態になったか否かを判別する(ステップS13)。ステップS13の判別はyz軸フォトセンサ107がON状態になるまで実行する。
【0102】
yz軸フォトセンサ107がON状態になったと判別すると、第1のノズル装着部32aの移動を停止する(ステップS14)。
【0103】
次いで、第1のノズル装着部32aの原点位置P1からのz軸方向の移動量を算出し、この算出移動量を記憶部16に記憶する(ステップS15)。これにより第1のノズル装着部32aのz軸基準点位置が登録される。
【0104】
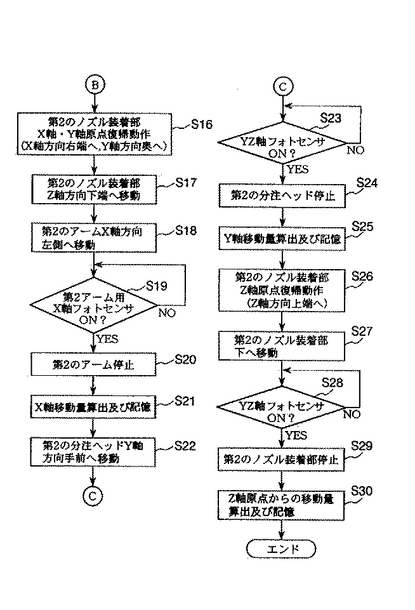
次いで、第2のノズル装着部32bの基準点登録処理に移る。
第2のノズル装着部32bがx軸方向をその動作範囲の右端へ、第2のノズル装着部32bがy軸方向をその動作範囲の後端へ、すなわちx軸、y軸の原点位置P2に移動する(ステップS16)。次に、第2のノズル装着部32bがz軸方向をその動作範囲の下端へ移動する(ステップS17)。次いで、第2のアーム11bがx軸方向を左側に移動し(ステップS18)、第2アーム用x軸フォトセンサ102がON状態になったか否かを判別する(ステップS19)。ステップS19は第2アーム用x軸フォトセンサ102がON状態になったと判別するまで実行する。
【0105】
ステップS19において、第2アーム用x軸フォトセンサ102がON状態になったと判別すると、第2のアーム11bの移動を停止する(ステップS20)。これにより、第2のノズル装着部32bがx軸上をx軸方向中心位置Cxに位置することになる。
【0106】
次いで、第2のアーム11bの原点位置P2からのx軸方向の移動量を算出し、この算出移動量を記憶部16に記憶する(ステップS21)。これにより第2のノズル装着部32bのx軸基準点位置が登録される。
【0107】
次いで第2のノズル装着部32bのy軸基準点位置の登録処理を開始する。
まず、第2のアーム11bがステップS20で停止した位置において、第2の分注ヘッド3bがy軸方向を手前に移動し(ステップS22)、yz軸フォトセンサ107がON状態になったか否かを判別する(ステップS23)。ステップS23の判別はyz軸フォトセンサ107がON状態になるまで実行される。
【0108】
yz軸フォトセンサ107がON状態になったと判別すると、第2の分注ヘッド3bの移動を停止する(ステップS24)。
【0109】
次いで、第2の分注ヘッド3bの原点位置P2からのy軸方向の移動量を算出し、この算出移動量を記憶部16に記憶する(ステップS25)。これにより第2のノズル装着部32bのy軸基準点位置が登録される。
【0110】
次いで、第2のノズル装着部32bのz軸基準点位置の登録処理を開始する。
まず、第2の分注ヘッド3bがステップS24で停止した位置において、第2のノズル装着部32bをz軸方向にその動作範囲内の上端へ移動してz軸原点復帰処理を行う(ステップS26)。次いで、第2のノズル装着部32bをz軸方向に上端から下方向へ移動し(ステップS27)、yz軸フォトセンサ107がON状態になったか否かを判別する(ステップS28)。ステップS28の判別はyz軸フォトセンサ107がON状態になるまで実行する。
【0111】
yz軸フォトセンサ107がON状態になったと判別すると、第2のノズル装着部32bの移動を停止する(ステップS29)。
【0112】
次いで、第2のノズル装着部32bの原点位置P2からのz軸方向の移動量を算出し、この算出移動量を記憶部16に記憶し(ステップS30)、本処理を終了する。これにより第2のノズル装着部32bのz軸基準点位置が登録され、基準点位置Bが登録される。る。
【0113】
本基準点登録処理により、第1のx軸方向移動機構4a、第1のy軸方向移動機構5a、第1のz軸方向移動機構6a、第2のx軸方向移動機構4b、第2のy軸方向移動機構5bおよび第2のz軸方向移動機構6bにおける、各々の動作に対する共通する1つの基準点位置B、すなわち、第1のノズル装着部32aおよび第2のノズル装着部32bの共通の1つの基準点位置Bを登録することができる。
【0114】
以上説明したように、この分注装置1によれば、第1のx軸方向移動機構4a、第1のy軸方向移動機構5aおよび第1のz軸方向移動機構6aで構成される第1の移動機構と、第2のx軸方向移動機構4b、第2のy軸方向移動機構5bおよび第2のz軸方向移動機構6bで構成される第2の移動機構とにおける、各々の動作に対する共通する1つの基準点、すなわち、第1のノズル装着部32aおよび第2のノズル装着部32bに対する共通する1つの基準点を有しているので、例えば、試験管ラック100の位置等を登録する作業に要する手間を軽減することができ、その作業を迅速に行なうことができる。
【0115】
すなわち、例えば、第1のx軸方向移動機構4a、第1のy軸方向移動機構5aおよび第1のz軸方向移動機構6aで構成される第1の移動機構と、第2のx軸方向移動機構4b、第2のy軸方向移動機構5bおよび第2のz軸方向移動機構6bで構成される第2の移動機構とのうちの一方について、前記試験管ラック100の位置を登録する作業を行なえば、他方の移動機構においては、前記基準点と、前記一方の移動機構について登録された試験管ラック100の位置とに基づいて、試験管ラック100の位置を求めることができる。
【0116】
また、共通する1つの基準点を登録する基準点登録手段を有しているので、操作者がタッチパネル25において所定の操作をするのみで、前記基準点を自動的に登録することができ、容器を保持するラックの位置等の登録作業に要する手間を軽減することができる。
【0117】
なお、本発明では、第1のノズル装着部32aおよび第2のノズル装着部32bに、それぞれ、ノズルチップ300を装着した状態で、基準点を登録する処理を行なうように構成してもよい。
【0118】
以上、本発明の分注装置を、図示の実施形態に基づいて説明したが、本発明はこれに限定されるものではなく、各部の構成は、同様の機能を有する任意の構成のものに置換することができる。また、本発明に、他の任意の構成物が付加されていてもよい。
【0119】
また、本発明では、分注する液体を収納する容器は、試験管のような形状のものに限らず、いかなるものでもよい。また、例えばマイクロプレートのように、複数の容器が一体となったものであってもよい。
【0120】
また、本発明では、x軸、y軸、z軸の各移動機構は、ベルトを利用したものに限定されることなく、いかなる機構でもよく、例えば、ボールねじ等の送りねじ、ラック&ピニオンギアなどを利用した任意の機構とすることができる。
【0121】
また、本発明の分注装置は、分注ヘッドや分注ポンプを3つ以上有するものでもよい。
また、本発明では、分注ポンプは、ノズル装着部またはノズルチップとともに分注ヘッドに対し昇降するように設置されていてもよい。
【図面の簡単な説明】
【0122】
【図1】本発明の分注装置の実施形態を示す斜視図である。
【図2】図1に示す分注装置における第1のx軸方向移動機構および第2のx軸方向移動機構を示す斜視図である。
【図3】図1に示す分注装置における第1のy軸方向移動機構、第1のz軸方向移動機構および第1の分注ヘッドを示す斜視図である。
【図4】図1に示す分注装置の概略的なブロック図である。
【図5】図1に示す分注装置の備える基準点登録装置の概略構成を示す図であり、図5(a)は上面図であり、図5(b)は左側側面図である。
【図6】図1に示す分注装置の備える基準点登録装置によって実行される基準点登録処理のフローチャートである。
【図7】図1に示す分注装置の備える基準点登録装置によって実行される基準点登録処理のフローチャートである。
【符号の説明】
【0123】
1 分注装置
11a 第1のアーム
11b 第2のアーム
12 ガイドレール
13 制御手段
14a 第1のポンプ駆動機構
14b 第2のポンプ駆動機構
16 記憶部
2 装置本体
21 作業台
22 第1の機器収納部
23 第2の機器収納部
24 突出部
25 タッチパネル
26 ガードバー
3a 第1の分注ヘッド
31a フレーム
32a 第1のノズル装着部
33a 配管チューブ
3b 第2の分注ヘッド
32b 第2のノズル装着部
4a 第1のx軸方向移動機構
41a、41b スライドブロック
411 固定部
42a 駆動プーリー
43a 従動プーリー
44a パルスモーター
45a ベルト
4b 第2のx軸方向移動機構
5a 第1のy軸方向移動機構
51a スライドブロック
52a 駆動プーリー
53a 従動プーリー
54a パルスモーター
55a ベルト
5b 第2のy軸方向移動機構
6a 第1のz軸方向移動機構
61a スライドブロック
62a、63a 従動プーリー
64a ベルト
65a パルスモーター
66a プロペラシャフト
67a 固定部材
68a 支持部
6b 第2のz軸方向移動機構
7a 第1の分注ポンプ
10 中点
100 試験管ラック
101 第1アーム用x軸フォトセンサ
102 第2アーム用x軸フォトセンサ
101a、102a ブラケット
103 x軸プレート
104 切欠き部
105 凸部
106 治具
107 yz軸フォトセンサ
200 チップラック
300 ノズルチップ
400 管理システム
B 基準点位置
P1 第1の原点位置
P2 第2の原点位置
Cx x軸方向中心位置
【技術分野】
【0001】
本発明は、液体を分注する分注装置に関する。
【背景技術】
【0002】
従来、臨床検査の分野や基礎研究の分野において、例えば、検体(血清等の血液または血液成分、尿等)、試薬(薬液)等の少量の液体の仕分け、希釈、混合、滴下作業などを行う分注装置として、独立2ノズル分注装置が知られている。
【0003】
独立2ノズル分注装置は、xyz座標系において移動可能な第1の移動機構(第1のx軸方向移動機構、第1のy軸方向移動機構および第1のz軸方向移動機構)および第2の移動機構(第2のx軸方向移動機構、第2のy軸方向移動機構および第2のz軸方向移動機構)と、第1の移動機構および第2の移動機構にそれぞれ設けられた第1のノズルおよび第2のノズルとを備え、第1の移動機構および第2の移動機構をそれぞれ独立して駆動することによって、第1のノズルおよび第2のノズルをそれぞれ複数の容器間で移動させることにより、分注作業を行う(例えば、特許文献1参照)。
【0004】
この独立2ノズル分注装置では、分注の際、第1の移動機構と第2の移動機構とのそれぞれにおいて、各容器の位置を把握している必要があり、このため、各容器を保持するラックの位置を登録する作業を、第1の移動機構と第2の移動機構とのそれぞれにおいて行なっている。
【0005】
しかしながら、従来の独立2ノズル分注装置では、ラックの位置を登録する作業を、第1の移動機構と第2の移動機構とのそれぞれにおいて行なっているので、その作業に長い時間と手間とを要していた。
【0006】
【特許文献1】特開2004−117221号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
本発明の目的は、複数のノズル装着部が装置本体に対しそれぞれ独立して移動する分注装置に、共通する1つの基準点を設ける(登録する)ことにより、例えば、容器(例えば試験管)を保持するラック(例えば試験管ラック)の位置等を登録する作業に要する手間を軽減することができ、その作業を迅速に行なうことができる分注装置を提供することにある。
【課題を解決するための手段】
【0008】
このような目的は、下記(1)〜(9)の本発明により達成される。
(1) 分注する液体を収納する複数の容器が並べて配置される作業台を有する装置本体と、
液体を吸入・吐出するノズルが着脱自在に装着されるノズル装着部を有する複数の分注ヘッドと、
前記各ノズルにそれぞれ液体を吸入・吐出させるための複数の分注ポンプと、
前記各分注ヘッドをそれぞれ前記装置本体に対し水平方向であるx軸方向に移動させる複数のx軸方向移動機構と、
前記各分注ヘッドをそれぞれ前記装置本体に対し水平方向であって前記x軸方向に対し垂直なy軸方向に移動させる複数のy軸方向移動機構と、
前記各ノズルまたは前記各ノズル装着部をそれぞれ前記装置本体に対し垂直方向であるz軸方向に移動させる複数のz軸方向移動機構と、
前記各ノズルまたは前記各ノズル装着部が前記装置本体に対しそれぞれ独立して移動するように、前記各x軸方向移動機構、前記各y軸方向移動機構および前記各z軸方向移動機構を制御する移動機構制御手段とを備える分注装置であって、
前記各x軸方向移動機構、前記各y軸方向移動機構および前記各z軸方向移動機構における、各々の動作に対する共通する1つの基準点を有することを特徴とする分注装置。
【0009】
(2) 前記移動機構制御手段により、前記各x軸方向移動機構、前記各y軸方向移動機構および前記各z軸方向移動機構を制御して作動させ、前記各分注ヘッドのx軸方向移動量と、前記各分注ヘッドのy軸方向移動量と、前記各ノズルまたは前記各ノズル装着部のz軸方向移動量とを検出し、これらの検出結果に基づいて前記基準点を登録する処理を行なう基準点登録手段を有する上記(1)に記載の分注装置。
【0010】
(3) 分注する液体を収納する複数の容器が並べて配置される作業台を有する装置本体と、
液体を吸入・吐出するノズルが着脱自在に装着される第1のノズル装着部を有する第1の分注ヘッドおよび前記ノズルが着脱自在に装着される第2のノズル装着部を有する第2の分注ヘッドと、
前記第1の分注ヘッドのノズルに液体を吸入・吐出させるための第1の分注ポンプおよび前記第2の分注ヘッドのノズルに液体を吸入・吐出させるための第2の分注ポンプと、
前記第1の分注ヘッドを前記装置本体に対し水平方向であるx軸方向に移動させる第1のx軸方向移動機構および前記第2の分注ヘッドを前記x軸方向に移動させる第2のx軸方向移動機構と、
前記第1の分注ヘッドを前記装置本体に対し水平方向であって前記x軸方向に対し垂直なy軸方向に移動させる第1のy軸方向移動機構および前記第2の分注ヘッドを前記装置本体に対し前記y軸方向に移動させる第2のy軸方向移動機構と、
前記第1の分注ヘッドのノズルまたは前記第1のノズル装着部を前記装置本体に対し垂直方向であるz軸方向に移動させる第1のz軸方向移動機構および前記第2の分注ヘッドのノズルおよび前記第2のノズル装着部を前記装置本体に対し前記z軸方向に移動させる第2のz軸方向移動機構と、
前記第1の分注ヘッドのノズルまたは前記第1のノズル装着部と、前記第2の分注ヘッドのノズルまたは前記第2のノズル装着部とが前記装置本体に対しそれぞれ独立して移動するように、前記第1のx軸方向移動機構、前記第1のy軸方向移動機構、前記第1のz軸方向移動機構、前記第2のx軸方向移動機構、前記第2のy軸方向移動機構および前記第2のz軸方向移動機構を制御する移動機構制御手段とを備える分注装置であって、
前記第1のx軸方向移動機構、前記第1のy軸方向移動機構および前記第1のz軸方向移動機構と、前記第2のx軸方向移動機構、前記第2のy軸方向移動機構および前記第2のz軸方向移動機構とにおける、各々の動作に対する共通する1つの基準点を有することを特徴とする分注装置。
【0011】
(4) 前記移動機構制御手段により、前記第1のx軸方向移動機構、前記第1のy軸方向移動機構、前記第1のz軸方向移動機構、前記第2のx軸方向移動機構、前記第2のy軸方向移動機構および前記第2のz軸方向移動機構を制御して作動させ、前記第1の分注ヘッドのx軸方向移動量と、前記第1の分注ヘッドのy軸方向移動量と、前記第1の分注ヘッドのノズルまたは前記第1のノズル装着部のz軸方向移動量と、前記第2の分注ヘッドのx軸方向移動量と、前記第2の分注ヘッドのy軸方向移動量と、前記第2の分注ヘッドのノズルまたは前記第2のノズル装着部のz軸方向移動量とを検出し、これらの検出結果に基づいて前記基準点を登録する処理を行なう基準点登録手段を有する上記(3)に記載の分注装置。
【0012】
(5) 前記基準点登録手段は、前記第1の分注ヘッドのノズルまたは前記第1のノズル装着部が第1の原点から前記基準点に移動し、かつ、前記第2の分注ヘッドのノズルまたは前記第2のノズル装着部が第2の原点から前記基準点に移動したときの、前記第1の分注ヘッドのx軸方向移動量と、前記第1の分注ヘッドのy軸方向移動量と、前記第1の分注ヘッドのノズルまたは前記第1のノズル装着部のz軸方向移動量と、前記第2の分注ヘッドのx軸方向移動量と、前記第2の分注ヘッドのy軸方向移動量と、前記第2の分注ヘッドのノズルまたは前記第2のノズル装着部のz軸方向移動量とを求め、これらの移動量に基づいて前記基準点を登録する上記(4)に記載の分注装置。
【0013】
(6) 前記基準点登録手段は、前記基準点と同じx座標上における前記第1の分注ヘッドの有無を検出する第1のx軸方向検出手段と、
前記基準点と同じx座標上における前記第2の分注ヘッドの有無を検出する第2のx軸方向検出手段と、
前記基準点と同じy座標上における前記第1の分注ヘッドの有無と、前記基準点と同じz座標上における前記第1の分注ヘッドのノズルまたは前記第1のノズル装着部の有無と、前記基準点と同じy座標上における前記第2の分注ヘッドの有無と、前記基準点と同じz座標上における前記第2の分注ヘッドのノズルまたは前記第2のノズル装着部の有無とを検出するyz軸方向検出手段とを備え、
前記基準点登録手段は、前記第1の分注ヘッドのノズルまたは前記第1のノズル装着部が第1の原点から前記基準点に移動し、かつ、前記第2の分注ヘッドのノズルまたは前記第2のノズル装着部が第2の原点から前記基準点に移動したときの、前記第1の分注ヘッドのx軸方向移動量と、前記第1の分注ヘッドのy軸方向移動量と、前記第1の分注ヘッドのノズルまたは前記第1のノズル装着部のz軸方向移動量と、前記第2の分注ヘッドのx軸方向移動量と、前記第2の分注ヘッドのy軸方向移動量と、前記第2の分注ヘッドのノズルまたは前記第2のノズル装着部のz軸方向移動量とを求め、これらの移動量に基づいて前記基準点を登録する上記(4)に記載の分注装置。
【0014】
(7) 前記第1のx軸方向検出手段は、前記第1の分注ヘッドに設置され、前記第2のx軸方向検出手段は、前記第2の分注ヘッドに設置され、前記yz軸方向検出手段は、前記作業台に設置される上記(6)に記載の分注装置。
【0015】
(8) 前記yz軸方向検出手段は、着脱自在である上記(6)または(7)に記載の分注装置。
【0016】
(9) 前記基準点登録手段は、x軸に平行に前記装置本体に設置され、切欠き部を有するx軸プレートを備え、
前記第1のx軸方向検出手段および前記第2のx軸方向検出手段は、それぞれ、前記x軸プレートの切欠き部の有無により、前記基準点と同じx座標上における前記第1の分注ヘッドの有無および前記第2の分注ヘッドの有無を検出し、前記yz軸方向検出手段は、前記第1の分注ヘッドのノズルまたは前記第1のノズル装着部と、前記第2の分注ヘッドのノズルまたは前記第2のノズル装着部とを検出する上記(6)ないし(8)のいずれかに記載の分注装置。
【発明の効果】
【0017】
本発明によれば、共通する1つの基準点を有しているので、例えば、容器を保持するラックの位置等を登録する作業に要する手間を軽減することができ、その作業を迅速に行なうことができる。
【0018】
すなわち、例えば、複数の移動機構(x軸方向移動機構、y軸方向移動機構およびz軸方向移動機構)のうちのいずれか1つについて、前記ラックの位置を登録する作業を行なえば、その他の移動機構においては、前記基準点と、前記1つの移動機構について登録されたラックの位置とに基づいて、それぞれの移動機構についてのラックの位置を求めることができる。
【0019】
また、共通する1つの基準点を登録する処理を行なう基準点登録手段を有する場合は、前記基準点を自動的に登録することができ、その基準点の登録を容易、迅速、正確かつ確実に行なうことができる。すなわち、例えば、共通する1つの基準点の登録を作業者が手動で行なう場合は、熟練が必要であるが、本発明では、前記基準点の登録を手動で行なう場合に比べ、各移動機構の動作精度を向上させることができる。従って、各ノズルまたは各ノズル装着部の移動精度を向上させることができる。
【発明を実施するための最良の形態】
【0020】
以下、本発明の分注装置を添付図面に示す好適な実施形態に基づいて詳細に説明する。
図1は、本発明の分注装置の実施形態を示す斜視図である。なお、以下では、説明の都合上、水平方向であって分注装置の横方向(左右方向)をx軸方向、水平方向であって前記x軸方向に対し垂直な方向(分注装置の前後方向)をy軸方向、x軸およびy軸に対して垂直方向(上下方向)をz軸方向と言い、図示のようにxyz座標系を想定する。また、図1では、分注ヘッド、アーム等の細部を省略して図示する。
【0021】
図1に示す分注装置1は、自動基準点登録機能を内蔵する独立2ノズル分注装置1であり、装置本体2と、該装置本体2に対しそれぞれ移動可能に設置された第1の分注ヘッド3aおよび第2の分注ヘッド3bの2つの分注ヘッドとを備えている。この分注装置1は、患者から採取した血液または血清等の血液成分、尿等の液体状の親検体(元検体)を分注して小分けにする(取り分ける)ことにより、検査用の子検体を作成する装置である。
【0022】
装置本体2は、作業台21と、作業台21の後ろ側に立設された第1の機器収納部22と、第1の機器収納部22の上方に設けられた第2の機器収納部23と、第2の機器収納部23の右側の部分から前方に突出する突出部24とを有している。
【0023】
作業台21上には、検体(液体)を収納する例えば試験管のような容器が複数並べて配置(載置)される。本実施形態では、作業台21上には、複数の試験管を立てた状態で行列状に保持する試験管ラック(ラック)100が複数載置可能になっている。そして、親検体を収納した試験管や、子検体を収納する試験管は、それぞれ、試験管ラック100に保持される。
【0024】
また、作業台21上における試験管ラック100の後方には、チップラック200が載置可能になっている。チップラック200は、ディスポーザブル(使い捨て)のノズルチップ(ノズル)300を立てた状態で行列状に複数並べて保持し得るようになっている。
【0025】
装置本体2には、第1の分注ヘッド3aを支持する第1のアーム11aと、第2の分注ヘッド3bを支持する第2のアーム11bとが設置されている。第1のアーム11aおよび第2のアーム11bは、それぞれ、その長手方向がy軸方向となる姿勢で配置され、その後端部は、第1の機器収納部22に支持されている。第1の機器収納部22には、図2で後述する第1のx軸方向移動機構4aおよび第2のx軸方向移動機構4bが設けられており、これらの作動により、第1のアーム11a(第1の分注ヘッド3a)および第2のアーム11b(第2の分注ヘッド3b)は、それぞれ独立して、装置本体2に対しx軸方向に移動する。
【0026】
また、第1のアーム11aの後端面には、凹部に、対向して設けられた第1アーム用x軸フォトセンサ101(第1のx軸方向検出手段)がブラケット101aを介して取り付けられており、第2のアーム11bの後端面には、凹部に、対向して設けられた第2アーム用x軸フォトセンサ102(第2のx軸方向検出手段)がブラケット102aを介して取り付けられている。第1アーム用x軸フォトセンサ101は、第1のアーム11aに取り付けられた図3で後述する第1のノズル装着部32aの中心軸とx軸方向の位置が同一の位置に配置されており、同様に、第2アーム用x軸フォトセンサ102は、第2のアーム11bに取り付けられた第2のノズル装着部32b(図5)の中心軸とx軸方向の位置が同一の位置に配置されている。
【0027】
第1アーム用x軸フォトセンサ101および第2アーム用x軸フォトセンサ102は、凹部を介して光を投光および受光する図示しない投光部および受光部を有し、凹部に物体が介在して投光部の光が遮られることにより、受光部が光を受光しないときに検出状態(ON状態)となり、凹部に物体が介在せずに受光部が投光部の光を受光するときが非検出状態(OFF状態)となる。
【0028】
装置本体2において、第1の機器収納部22の上方には、xy平面に水平な平面板状のx軸プレート103がx軸(x軸方向)に平行に取り付けられている。x軸プレート103は、装置本体2のx軸方向中心(x軸方向中間点)から右側に切欠き部104が形成され、装置本体2のx軸方向中心から左側に凸部105が形成された平面視略L字型の形状をしており、凸部105が第1アーム用x軸フォトセンサ101および第2アーム用x軸フォトセンサ102の凹部に介在し、切欠き部104が第1アーム用x軸フォトセンサ101および第2アーム用x軸フォトセンサ102の凹部に介在しないように装置本体2に配置されている。
【0029】
すなわち、第1のアーム11aおよび第2のアーム11bがx軸方向を、装置本体2のx軸方向中心から左側、すなわち凸部105の有る部分を移動するときは、第1アーム用x軸フォトセンサ101および第2アーム用x軸フォトセンサ102の凹部にx軸プレート103の凸部105が介在し、第1アーム用x軸フォトセンサ101および第2アーム用x軸フォトセンサ102はON状態となり、一方、第1のアーム11aおよび第2のアーム11bが、装置本体2のx軸方向中心から右側を移動するときは、第1アーム用x軸フォトセンサ101および第2アーム用x軸フォトセンサ102はOFF状態となる。
【0030】
このようにして、第1アーム用x軸フォトセンサ101および第2アーム用x軸フォトセンサ102により、切欠き部104と凸部105との境界を検出することができる。
【0031】
なお、x軸プレート103の切欠き部104の形成位置、すなわち、切欠き部104と凸部105との境界の位置は、上述のものに限るものではない。
【0032】
また、作業台21上の前縁近傍で、かつ試験管ラック100の前方であって装置本体2のx軸方向中心には、断面が略L字型の治具106を取り付け、この治具106の上端に凹部を設け、この凹部にyz軸フォトセンサ(yz軸方向検出手段)107の発光部と受光部が対向するように設けられている。このyz軸フォトセンサ107の位置は、後述する基準点位置Bと一致している。また、yz軸フォトセンサ107は、治具106と一体的に着脱し得るようになっている。
【0033】
なお、前記yz軸フォトセンサ107は、例えば、作業台21に埋め込まれていてもよい。
【0034】
第1の分注ヘッド3aおよび第2の分注ヘッド3bは、それぞれ、第1のアーム11aおよび第2のアーム11bの長手方向、すなわちy軸方向に沿って移動可能に支持されている。第1の分注ヘッド3aおよび第2の分注ヘッド3bは、それぞれ独立して、装置本体2に対しy軸方向に移動する。その移動機構の動作は、図3、図4を用いて後述する。
【0035】
第1の分注ヘッド3aが移動可能な範囲(領域)と、第2の分注ヘッド3bが移動可能な範囲(領域)とは、全部または一部において重なっている。第1の分注ヘッド3aおよび第2の分注ヘッド3bは、図4で後述する制御手段13により、互いに接触(衝突)しないようにその移動がそれぞれ制御されている。
【0036】
装置本体2の突出部24は、第1の分注ヘッド3aおよび第2の分注ヘッド3bが移動する作業空間(作業領域)の上方に位置している。突出部24の前面には、表示部および操作部(入力部)として、タッチパネル25が設置されている。タッチパネル25には、例えば各種条件を設定する入力画面等が表示され、操作者(作業者)は、タッチパネル25に指で触れることにより、分注装置1の各種条件の設定等を行う。また、タッチパネル25には、例えば分注装置1の状態、エラーの発生等の情報も表示される。
【0037】
また、装置本体2には、第1のアーム11aおよび第2のアーム11bの前方に位置する2本のガードバー26が設置されている。これにより、移動する第1のアーム11aおよび第2のアーム11bに操作者が衝突するのを防止することができる。
【0038】
図2は、図1に示す分注装置における第1のx軸方向移動機構および第2のx軸方向移動機構を示す斜視図である。
【0039】
図2に示すように、第1のx軸方向移動機構4aは、第1の機器収納部22に設置されたガイドレール12の案内によりx軸方向に沿って移動可能に設置されたスライドブロック(移動体)41aと、ガイドレール12の両端付近にそれぞれ設置された駆動プーリー(ベルト車)42aおよび従動プーリー(ベルト車)43aと、駆動プーリー42aを回転駆動するパルスモーター(ステッピングモーター)44aと、駆動プーリー42aと従動プーリー43aとの間に張架されたベルト45aとを有している。
【0040】
スライドブロック41aは、突出形成された固定部411にてベルト45aの一部に固定されている。スライドブロック41aには、第1のアーム11aの後端部が固定されている。
【0041】
パルスモーター44aが駆動プーリー42aを回転駆動すると、ベルト45aが回転し、ベルト45aに牽引されてスライドブロック41aがx軸方向に移動する。これに伴って、第1のアーム11aもx軸方向に移動する。スライドブロック41aおよび第1のアーム11aは、パルスモーター44aの正転/逆転の切り換えにより、装置本体2に対し右方向または左方向に移動する。
【0042】
ベルト45aは、駆動プーリー42aおよび従動プーリー43aの外周面に形成された歯と噛み合う歯を有する歯付きベルトで構成されており、駆動プーリー42aおよび従動プーリー43aに対し滑りを生じないようになっている。
【0043】
ガイドレール12には、第2のx軸方向移動機構4bのスライドブロック(移動体)41bがさらに設置され、このスライドブロック41bには、第2のアーム11bの後端部が固定されている。
【0044】
第2のx軸方向移動機構4bは、第1のx軸方向移動機構4aと同様の構成になっており、ガイドレール12において後方に設けられ、図2中では見えていない駆動プーリー、従動プーリーおよびベルトと、該駆動プーリーを回転駆動するパルスモーター(ステッピングモーター)44bとを有し、スライドブロック41bは、該ベルトの一部に固定されている。スライドブロック41bには、第2のアーム11bの後端部が固定されており、パルスモーター44bが回転すると、第2のアーム11bがx軸方向に移動する。
【0045】
図3は、図1に示す分注装置における第1のy軸方向移動機構、第1のz軸方向移動機構および第1の分注ヘッドを示す斜視図である。なお、図3に示す分注ヘッドは、内部構造が見えるように、外装のカバーを取り外した状態になっている。
【0046】
図3に示すように、第1のy軸方向移動機構5aは、図示しないガイドレールの案内により第1のアーム11aの長手方向に沿って移動可能に設置されたスライドブロック51aと、第1のアーム11aの後端付近に設置された駆動プーリー52aと、第1のアーム11aの前端付近に設置された従動プーリー53aと、第1のアーム11aの後端付近に設置され、駆動プーリー52aを回転駆動するパルスモーター54aと、駆動プーリー52aと従動プーリー53aとの間に張架されたベルト55aとを有している。
【0047】
スライドブロック51aは、ベルト55aの一部に固定されている。スライドブロック51aには、第1の分注ヘッド3aのフレーム31aが固定されている。
【0048】
パルスモーター54aが駆動プーリー52aを回転駆動すると、ベルト55aが回転し、ベルト55aに牽引されてスライドブロック51aが第1のアーム11aの長手方向すなわちy軸方向に移動する。これに伴って、第1の分注ヘッド3aも、y軸方向に移動する。スライドブロック51aおよび第1の分注ヘッド3aは、パルスモーター54aの正転/逆転の切り換えにより、装置本体2に対し前方または後方に移動する。
【0049】
ベルト55aは、駆動プーリー52aおよび従動プーリー53aの外周面に形成された歯と噛み合う歯を有する歯付きベルトで構成されており、駆動プーリー52aおよび従動プーリー53aに対し滑りを生じないようになっている。
【0050】
なお、第2のy軸方向移動機構5bは、第1のy軸方向移動機構5aと左右対称であること以外は同様の構成であるので、説明および図示を省略する。
【0051】
図3に示すように、第1の分注ヘッド3aは、z軸方向に長い部材で構成された骨格をなすフレーム31aと、ノズルチップ300を装着可能な第1のノズル装着部32aとを有している。
【0052】
第1のノズル装着部32aは、その内部に通気流路が形成されたほぼ管状の部材で構成されている。第1のノズル装着部32aの構成材料は、例えばステンレス鋼、アルミニウムまたはアルミニウム合金、銅または銅系合金等の各種金属材料であるのが好ましい。
【0053】
ノズルチップ300は、その基端開口(上端開口)に、第1のノズル装着部32aの下端部が嵌挿されることにより、第1のノズル装着部32aに着脱自在に装着される。ノズルチップ300の構成材料としては、各種合成樹脂材料が挙げられる。また、ノズルチップ300は、半透明または透明であって光透過性を有しているのが好ましい。
【0054】
第1の分注ヘッド3aのフレーム31aには、第1のノズル装着部32aに装着されたノズルチップ300内の圧力を増減させることによりノズルチップ300に液体を吸入させ、またはノズルチップ300から液体を吐出させるための第1の分注ポンプ7aが設置されている。第1の分注ポンプ7aは、気体(空気)を吸入・吐出する例えばシリンジポンプ(ピストンポンプ)で構成されている。この第1の分注ポンプ7aは、ノズルチップ300内の圧力を減少させることにより、ノズルチップ300に液体を吸入させ、ノズルチップ300内の圧力を増大させることにより、吸入した液体をノズルチップ300から吐出させる。第1の分注ポンプ7aと、第1のノズル装着部32aとは、可撓性を有する配管チューブ33aで接続されており、互いの内部空間が連通されている。
【0055】
また、第1の分注ヘッド3aのフレーム31aには、第1の分注ポンプ7aのプランジャ(ピストン)を移動させる第1のポンプ駆動機構14aが設置されている(図4参照)。第1のポンプ駆動機構14aは、例えば、ボールねじ(送りねじ)機構(図示せず)とこれを駆動するパルスモーター(図示せず)とを有しており、これらにより第1の分注ポンプ7aのプランジャを移動させるようになっている。
【0056】
第1のノズル装着部32aは、フレーム31aに対しz軸方向に移動可能に設置されており、第1のz軸方向移動機構6aの作動により、装置本体2に対しz軸方向に移動(昇降)する。
【0057】
第1のz軸方向移動機構6aは、フレーム31aに対し図示しないガイドレールの案内によりz軸方向に沿って移動可能に設置されたスライドブロック(移動体)61aと、フレーム31aの上端付近および下端付近にそれぞれ設置された従動プーリー(ベルト車)62aおよび63aと、ベルト64aとを有している。
【0058】
スライドブロック61aは、固定部材67aを介して、ベルト64aの一部に固定されている。スライドブロック61aには、支持部68aを介して、第1のノズル装着部32aが固定されている。
【0059】
スライドブロック51aの内部には、ベルト64aを駆動する駆動プーリー(図示せず)が設置されており、ベルト64aは、従動プーリー62aと63aとの間に張架されると共に、その中間の部分においてスライドブロック51a内に引き込まれ、この駆動プーリーにも張架されている。
【0060】
スライドブロック51a内の駆動プーリーは、第1のアーム11aの後端付近に設置されたパルスモーター(ステッピングモーター)65a(図3)により回転駆動される。すなわち、第1のアーム11aには、第1のアーム11aの長手方向に沿って延びるプロペラシャフト66aが回転可能に設置されており、パルスモーター65aの出力軸は、このプロペラシャフト66aに接続されている。プロペラシャフト66aは、スライドブロック51aおよびその内部の駆動プーリーを貫通しており、スライドブロック51aは、プロペラシャフト66aを挿通した状態でy軸方向に移動する。スライドブロック51a内の駆動プーリーは、スライドブロック51aのプロペラシャフト66aに対する位置によらず、プロペラシャフト66aと共に回転するようになっている。
【0061】
パルスモーター65aがプロペラシャフト66aを介してスライドブロック51a内の駆動プーリーを回転駆動すると、ベルト64aが回転し、ベルト64aに牽引されて、スライドブロック61aがz軸方向に移動する。これに伴って、第1のノズル装着部32aおよびノズルチップ300も、z軸方向に移動(昇降)する。第1のノズル装着部32aおよびノズルチップ300は、パルスモーター65aの正転/逆転の切り換えにより、上昇または下降する。
【0062】
このように、第1のノズル装着部32aに装着されたノズルチップ300またはノズルチップ300が装着されていない第1のノズル装着部32aは、第1のアーム11aの第1のx軸方向移動機構4aによってx軸方向に移動され、第1の分注ヘッド3aの第1のy軸方向移動機構5aによってy軸方向に移動され、第1の分注ヘッド3aの第1のz軸方向移動機構6aによってz軸方向に移動される。そして、yz軸フォトセンサ107の凹部にノズルチップ300または第1のノズル装着部32aが位置するとき(収容されているとき)は、yz軸フォトセンサ107はON状態となり、一方、yz軸フォトセンサ107の凹部にノズルチップ300または第1のノズル装着部32aが位置していないときは、yz軸フォトセンサ107はOFF状態となる。
【0063】
このようにして、yz軸フォトセンサ107により、第1のノズル装着部32aに装着されたノズルチップ300または第1のノズル装着部32aと、第2のノズル装着部32bに装着されたノズルチップ300または第2のノズル装着部32bとを検出することができる。すなわち、yz軸フォトセンサ107により、後述する基準点と同じy座標上における第1の分注ヘッド3aの有無と、基準点と同じz座標上における第1のノズル装着部32aに装着されたノズルチップ300または第1のノズル装着部32aの有無と、基準点と同じy座標上における第2の分注ヘッド3bの有無と、基準点と同じz座標上における第2のノズル装着部32bに装着されたノズルチップ300または第2のノズル装着部32bの有無とを検出することができる。
【0064】
なお、本実施形態では、代表的に、yz軸フォトセンサ107により、第1のノズル装着部32aを検出するよう構成した場合について説明する。
【0065】
このような第1の分注ヘッド3aの基本的な動作は、次のようなものである(第2の分注ヘッド3bについても同様)。まず、第1のノズル装着部32aを下降させて吸入先の容器内にノズルチップ300を挿入し、この状態で第1の分注ポンプ7aを作動してノズルチップ300内の圧力を減少させることにより、ノズルチップ300内に液体を吸入する。次いで、ノズルチップ300を上昇させてから吐出先の容器の位置に第1の分注ヘッド3aを移動させる。次いで、ノズルチップ300を吐出先容器内に下降させ、第1の分注ポンプ7aを作動してノズルチップ300内の圧力を増大させることにより、吸入した液体を吐出する。
【0066】
続いて異なる検体を分注する場合には、コンタミネーションを防止するため、次のようにしてノズルチップ300を交換する。使用済みノズルチップ300の取り外しは、第1の分注ヘッド3aを装置本体2に設置されたチップリムーバ(図示せず)の位置に移動させて行う。チップリムーバは、第1のノズル装着部32aが挿入可能な切欠きを有する板状の部材であり、この切欠きに第1のノズル装着部32aを挿入して第1のノズル装着部32aを上昇させると、ノズルチップ300の上端がチップリムーバの下面に当接することにより、ノズルチップ300が第1のノズル装着部32aから離脱する。次いで、第1の分注ヘッド3aをチップラック200の上方に移動させ、第1のノズル装着部32aを下降させることにより、新しいノズルチップ300が第1のノズル装着部32aに装着される。
【0067】
図4は、図1に示す分注装置の概略的なブロック図である。図4に示すように、分注装置1は、前述したような分注装置1の各部がそれぞれ接続された制御手段13を備えている。また、制御手段13には、さらに、記憶部(記憶手段)16が接続されている。この制御手段13は、CPU(Central Processing Unit)と、シーケンサとを有し、ソフト的およびハード的に構成されている。
【0068】
記憶部16は、プログラムやデータ等を記憶する、制御手段13に読み取り可能な記憶媒体を有している。この記憶媒体は、例えば、RAM、FD、HD、CD−ROM等で構成されている。この記憶媒体には、分注装置1の動作を実行するための各種プログラムおよび各種データが予め記憶されている。また、各プログラムで処理されたデータおよび制御手段13に接続された各部からの入力データ等が記憶される。
【0069】
制御手段13は、記憶部16に記憶された各種プログラムおよびデータを必要に応じて読み出し、そのプログラムおよびデータに基づいて、分注装置1の各部の作動を制御する。
【0070】
なお、制御手段13は、シーケンサを有さずにすべてソフト的に構成されていてもよく、または、シーケンサのみを用いてすべてをシーケンス制御で行うようにハード的に構成されていてもよい。
【0071】
制御手段13は、第1のx軸方向移動機構4a、第1のy軸方向移動機構5a、第1のz軸方向移動機構6a、第2のx軸方向移動機構4b、第2のy軸方向移動機構5bおよび第2のz軸方向移動機構6bの作動を、それぞれ、オープンループ制御により制御する。
【0072】
記憶部16には、各移動機構4a、5a、6a、4b、5bおよび6bの各パルスモーターに対する、所定の原点位置が記憶されている。
【0073】
本実施形態においては、第1のx軸方向移動機構4a、第1のy軸方向移動機構5aおよび第1のz軸方向移動機構6aで構成される第1の移動機構(各パルスモーター44a、54aおよび65a)の原点位置P1(図5(a)、図5(b)参照)は、装置本体2においてそれぞれ、第1のアーム11aがx軸方向に最も左側に移動した位置、第1の分注ヘッド3aがy軸方向に最も奥側に移動した位置および第1のノズル装着部32aがz軸方向に最も上側に移動した位置である。すなわち、第1のアーム11aの第1のノズル装着部32aの原点(第1の原点)位置は、原点位置P1となる。
【0074】
また、本実施形態においては、第2のx軸方向移動機構4b、第2のy軸方向移動機構5bおよび第2のz軸方向移動機構6bで構成される第2の移動機構(各パルスモーター)の原点位置P2(図5(a)、図5(b)参照)は、装置本体2においてそれぞれ、第2のアーム11bがx軸方向に最も右側に移動した位置、第2の分注ヘッド3bがy軸方向に最も奥側に移動した位置および第2のノズル装着部32bがz軸方向に最も上側に移動した位置である。すなわち、第2のアーム11bの第2のノズル装着部32bの原点(第2の原点)位置は、原点位置P2となる。
【0075】
記憶部16には、さらに、図6および図7で後述する基準点登録処理によって登録される、各移動機構4a、5a、6a、4b、5bおよび6b(各パルスモーター)に対する共通する1つの基準点位置(基準点)B(図5(a)、図5(b)参照)が記憶されている。すなわち、第1のアーム11aの第1のノズル装着部32aの基準点位置と、第2のアーム11bの第2のノズル装着部32bの基準点位置とは、共通する1つの基準点位置Bとなり、したがって、第1のノズル装着部32aおよび第2のノズル装着部32bは、共通する1つの基準点位置Bを有する。
【0076】
制御手段13は、各移動機構の各パルスモーターに対する、第1の原点位置(原点位置)P1、第2の原点位置(原点位置)P2や基準点位置Bからの駆動パルス数を監視することにより、第1の分注ヘッド3aおよび第2の分注ヘッド3bの位置や、第1および第2のノズル装着部32a、32bの高さをそれぞれ把握している。
【0077】
また、制御手段13は、第1のx軸方向移動機構4a、第1のy軸方向移動機構5aおよび第1のz軸方向移動機構6aにおける特定の位置に関する情報と、前記基準点とに基づいて、第2のx軸方向移動機構4b、第2のy軸方向移動機構5bおよび第2のz軸方向移動機構6bにおける前記特定の位置を求めることができ、第2の分注ヘッド3bの第2のノズル装着部32bを前記特定の位置に移動させることができる。同様に、制御手段13は、第2のx軸方向移動機構4b、第2のy軸方向移動機構5bおよび第2のz軸方向移動機構6bにおける特定の位置に関する情報と、前記基準点とに基づいて、第1のx軸方向移動機構4a、第1のy軸方向移動機構5aおよび第1のz軸方向移動機構6aにおける前記特定の位置を求めることができ、第1の分注ヘッド3aの第1のノズル装着部32aを前記特定の位置に移動させることができる。したがって、この分注装置1では、前記特定の位置を登録する処理は、第1のx軸方向移動機構4a、第1のy軸方向移動機構5aおよび第1のz軸方向移動機構6aと、第2のx軸方向移動機構4b、第2のy軸方向移動機構5bおよび第2のz軸方向移動機構6bとのいずれか一方で行なえばよい。
【0078】
なお、前述した構成に限らず、各移動機構をクローズドループ制御により制御するようにしてもよい。
【0079】
制御手段13は、第1の分注ヘッド3aの第1のノズル装着部32aと、第2の分注ヘッド3bの第2のノズル装着部32bとが、それぞれ独立して、x、y、z軸方向に移動するように制御する。
【0080】
また、制御手段13は、第1のポンプ駆動機構14a、第2のポンプ駆動機構14bの各パルスモーターの作動をそれぞれ制御することにより、第1の分注ヘッド3a、第2の分注ヘッド3bによる液体吸入量および液体吐出量をそれぞれ個別に制御する。
【0081】
また、制御手段13は、検体処理システムの全体を管理する管理システム(ホストコンピュータ)400に接続されている。制御手段13は、管理システム400から取得した各親検体毎の分注情報に基づき、各部の作動を制御して分注作業を行う。そして、制御手段13は、例えば分注先の位置情報等を管理システム400に報告する。
【0082】
このような分注装置1では、第1の分注ヘッド3aの第1のノズル装着部32aと、第2の分注ヘッド3bの第2のノズル装着部32bとが、それぞれ独立して、x、y、z軸方向に移動することができるので、分注動作の自由度が高い。すなわち、第1、2のノズル装着部32a、32b(両ノズルチップ300)をそれぞれランダムに作動させることも可能であり、両者を効率良くフルに活用して分注作業を行うことができる。よって、多数の検体を処理する場合でも、処理効率が高く、短時間で大量の検体を処理することができる。
【0083】
さらに、第1の分注ヘッド3aと第2の分注ヘッド3bとが同種の液体を分注する用途だけでなく、例えば、第1の分注ヘッド3aで分注した子検体に、第2の分注ヘッド3bで試薬(薬液)を分注する、というように、第1の分注ヘッド3aと第2の分注ヘッド3bとが異種の液体を分注するような用途にも好適に使用することができる。このように、分注装置1では、制御手段13の制御の仕方によって、多様な分注動作を高い効率で行うことができる。
【0084】
図5は、図1に示す分注装置の備える基準点登録装置の概略構成を示す図であり、図5(a)は上面図であり、図5(b)は左側側面図である。
【0085】
第1アーム用x軸フォトセンサ101、第2アーム用x軸フォトセンサ102、x軸プレート103、yz軸フォトセンサ107および制御手段13は、基準点登録手段を構成する。
【0086】
上述のように、第1のアーム11aがx軸中心位置Cxから左側を移動するときは、第1のアーム11aに取り付けられた第1アーム用x軸フォトセンサ101にx軸プレート103の凸部105が介在し、ON状態となる。同様に、第2のアーム11bがx軸中心位置Cxから左側を移動するときは、第2のアーム11bに取り付けられた第2アーム用x軸フォトセンサ102にx軸プレート103の凸部105が介在し、ON状態となる。
【0087】
一方、第1アーム用x軸フォトセンサ101は、第1のアーム11aがx軸中心位置Cxから右側を移動するときは、x軸プレート103には切欠き部104が形成されているので、OFF状態となる。同様に、第2アーム用x軸フォトセンサ102は、第2のアーム11bがx軸中心位置Cxから右側を移動するときは、x軸プレート103には切欠き部104が形成されているので、OFF状態となる。
【0088】
なお、第1アーム用x軸フォトセンサ101は、第1のノズル装着部32aの中心軸がx軸上におけるx軸プレート103の切欠き部104と凸部105の境界位置で、ON状態とOFF状態とが切り換わる。同様に、第2アーム用x軸フォトセンサ102は、第2のノズル装着部32bの中心軸がx軸上におけるx軸プレート103の切欠き部104と凸部105の境界位置で、ON状態とOFF状態とが切り換わる。
【0089】
また、上述したように、第1のアーム11aがx軸方向に移動し、第1の分注ヘッド3aの第1のノズル装着部32aの中心軸がx軸中心位置Cxに位置し、第1のノズル装着部32aがz軸方向に最も下側に移動した状態において、第1の分注ヘッド3aがy軸方向に前側に移動して第1のノズル装着部32aが作業台21上に取り付けられたyz軸フォトセンサ107の凹部に位置する(収容される)と、yz軸フォトセンサ107はON状態になる(図5(b)参照)。
【0090】
同様に、第2のアーム11bがx軸方向に移動し、第2の分注ヘッド3bの第2のノズル装着部32bの中心軸がx軸上でx軸方向中心位置Cxに位置する状態であって、第2のノズル装着部32bがz軸方向に最も下側に移動した状態において、第2の分注ヘッド3bがy軸方向に前側に移動して第2のノズル装着部32bが作業台21上に取り付けられたyz軸フォトセンサ107の凹部に位置すると、yz軸フォトセンサ107はON状態になる(図5(b)参照)。
【0091】
次いで、分注装置1の基準点登録装置による基準点を登録する処理(基準点登録処理)について説明する。
【0092】
本実施形態では、第1のノズル装着部32aおよび第2のノズル装着部32bにそれぞれノズルチップ300を装着しない状態で、基準点登録処理を行なう。そして、この基準点登録処理では、第1の分注ヘッド3a第1のノズル装着部32aが原点位置P1から基準点位置Bに移動し、かつ、第2の分注ヘッド3bの第2のノズル装着部32bが原点位置P2から基準点位置Bに移動したときの第1のアーム11aのx軸方向の移動量と、第1の分注ヘッド3aのy軸方向の移動量と、第1のノズル装着部32aのz軸方向の移動量と、第2のアーム11bのx軸方向の移動量と、第2の分注ヘッド3bのy軸方向の移動量と、第2のノズル装着部32bのz軸方向の移動量とを求め、これらの移動量に基づいて、共通する1つの基準点を登録する。以下、フローチャートに基づいて説明する。
【0093】
図6および図7は、図1に示す分注装置の備える基準点登録装置によって実行される基準点登録処理のフローチャートである。
【0094】
本基準点登録処理は、タッチパネル25に表示される操作ボタンを操作して基準点登録開始が選択されることにより実行される。
【0095】
まず、第1のノズル装着部32aの基準点登録が実行される。第1のアーム11a(第1のノズル装着部32a)がx軸方向をその動作範囲内の左端へ、第1の分注ヘッド3a(第1のノズル装着部32a)がy軸方向をその動作範囲内の後端へ、すなわちx軸、y軸の原点位置P1に移動して、x軸、y軸原点復帰処理を実行し(ステップS1)、第1のノズル装着部32aがz軸方向をその動作範囲内の下端へ移動する(ステップS2)。次いで、第1のアーム11aがx軸方向を右側に移動し(ステップS3)、第1アーム用x軸フォトセンサ101がOFF状態になったか否かを判別する(ステップS4)。ステップS4の判別は第1アーム用x軸フォトセンサ101がOFF状態になったと判別するまで実行する。
【0096】
ステップS4において、第1アーム用x軸フォトセンサ101がOFF状態になったと判別すると、第1のアーム11aの移動を停止する(ステップS5)。これにより、第1のノズル装着部32aがx軸上をx軸方向中心位置Cxに位置することになる。
【0097】
次いで、第1のアーム11aの原点位置P1からのx軸方向の移動量を算出し、この算出移動量を記憶部16に記憶する(ステップS6)。これにより第1のノズル装着部32aのx軸基準点位置が登録される。
【0098】
次いで第1のノズル装着部32aのy軸基準点位置の登録処理を開始する。
まず、第1のアーム11aがステップS5で停止した位置において、第1の分注ヘッド3aがy軸方向を手前に移動し(ステップS7)、yz軸フォトセンサ107がON状態になったか否かを判別する(ステップS8)。ステップS8の判別はyz軸フォトセンサ107がON状態になるまで実行される。
【0099】
yz軸フォトセンサ107がON状態になったと判別すると、第1の分注ヘッド3aの移動を停止する(ステップS9)。
【0100】
次いで、第1の分注ヘッド3aの原点位置P1からのy軸方向の移動量を算出し、この算出移動量を記憶部16に記憶する(ステップS10)。これにより第1のノズル装着部32aのy軸基準点位置が登録される。
【0101】
次いで、第1のノズル装着部32aのz軸基準点位置の登録処理を開始する。
まず、第1の分注ヘッド3aがステップS9で停止した位置において、第1のノズル装着部32aをz軸方向にその動作範囲内の上端へ移動してz軸原点復帰処理を行う(ステップS11)。次いで、第1のノズル装着部32aをz軸下方向へ移動し(ステップS12)、yz軸フォトセンサ107がON状態になったか否かを判別する(ステップS13)。ステップS13の判別はyz軸フォトセンサ107がON状態になるまで実行する。
【0102】
yz軸フォトセンサ107がON状態になったと判別すると、第1のノズル装着部32aの移動を停止する(ステップS14)。
【0103】
次いで、第1のノズル装着部32aの原点位置P1からのz軸方向の移動量を算出し、この算出移動量を記憶部16に記憶する(ステップS15)。これにより第1のノズル装着部32aのz軸基準点位置が登録される。
【0104】
次いで、第2のノズル装着部32bの基準点登録処理に移る。
第2のノズル装着部32bがx軸方向をその動作範囲の右端へ、第2のノズル装着部32bがy軸方向をその動作範囲の後端へ、すなわちx軸、y軸の原点位置P2に移動する(ステップS16)。次に、第2のノズル装着部32bがz軸方向をその動作範囲の下端へ移動する(ステップS17)。次いで、第2のアーム11bがx軸方向を左側に移動し(ステップS18)、第2アーム用x軸フォトセンサ102がON状態になったか否かを判別する(ステップS19)。ステップS19は第2アーム用x軸フォトセンサ102がON状態になったと判別するまで実行する。
【0105】
ステップS19において、第2アーム用x軸フォトセンサ102がON状態になったと判別すると、第2のアーム11bの移動を停止する(ステップS20)。これにより、第2のノズル装着部32bがx軸上をx軸方向中心位置Cxに位置することになる。
【0106】
次いで、第2のアーム11bの原点位置P2からのx軸方向の移動量を算出し、この算出移動量を記憶部16に記憶する(ステップS21)。これにより第2のノズル装着部32bのx軸基準点位置が登録される。
【0107】
次いで第2のノズル装着部32bのy軸基準点位置の登録処理を開始する。
まず、第2のアーム11bがステップS20で停止した位置において、第2の分注ヘッド3bがy軸方向を手前に移動し(ステップS22)、yz軸フォトセンサ107がON状態になったか否かを判別する(ステップS23)。ステップS23の判別はyz軸フォトセンサ107がON状態になるまで実行される。
【0108】
yz軸フォトセンサ107がON状態になったと判別すると、第2の分注ヘッド3bの移動を停止する(ステップS24)。
【0109】
次いで、第2の分注ヘッド3bの原点位置P2からのy軸方向の移動量を算出し、この算出移動量を記憶部16に記憶する(ステップS25)。これにより第2のノズル装着部32bのy軸基準点位置が登録される。
【0110】
次いで、第2のノズル装着部32bのz軸基準点位置の登録処理を開始する。
まず、第2の分注ヘッド3bがステップS24で停止した位置において、第2のノズル装着部32bをz軸方向にその動作範囲内の上端へ移動してz軸原点復帰処理を行う(ステップS26)。次いで、第2のノズル装着部32bをz軸方向に上端から下方向へ移動し(ステップS27)、yz軸フォトセンサ107がON状態になったか否かを判別する(ステップS28)。ステップS28の判別はyz軸フォトセンサ107がON状態になるまで実行する。
【0111】
yz軸フォトセンサ107がON状態になったと判別すると、第2のノズル装着部32bの移動を停止する(ステップS29)。
【0112】
次いで、第2のノズル装着部32bの原点位置P2からのz軸方向の移動量を算出し、この算出移動量を記憶部16に記憶し(ステップS30)、本処理を終了する。これにより第2のノズル装着部32bのz軸基準点位置が登録され、基準点位置Bが登録される。る。
【0113】
本基準点登録処理により、第1のx軸方向移動機構4a、第1のy軸方向移動機構5a、第1のz軸方向移動機構6a、第2のx軸方向移動機構4b、第2のy軸方向移動機構5bおよび第2のz軸方向移動機構6bにおける、各々の動作に対する共通する1つの基準点位置B、すなわち、第1のノズル装着部32aおよび第2のノズル装着部32bの共通の1つの基準点位置Bを登録することができる。
【0114】
以上説明したように、この分注装置1によれば、第1のx軸方向移動機構4a、第1のy軸方向移動機構5aおよび第1のz軸方向移動機構6aで構成される第1の移動機構と、第2のx軸方向移動機構4b、第2のy軸方向移動機構5bおよび第2のz軸方向移動機構6bで構成される第2の移動機構とにおける、各々の動作に対する共通する1つの基準点、すなわち、第1のノズル装着部32aおよび第2のノズル装着部32bに対する共通する1つの基準点を有しているので、例えば、試験管ラック100の位置等を登録する作業に要する手間を軽減することができ、その作業を迅速に行なうことができる。
【0115】
すなわち、例えば、第1のx軸方向移動機構4a、第1のy軸方向移動機構5aおよび第1のz軸方向移動機構6aで構成される第1の移動機構と、第2のx軸方向移動機構4b、第2のy軸方向移動機構5bおよび第2のz軸方向移動機構6bで構成される第2の移動機構とのうちの一方について、前記試験管ラック100の位置を登録する作業を行なえば、他方の移動機構においては、前記基準点と、前記一方の移動機構について登録された試験管ラック100の位置とに基づいて、試験管ラック100の位置を求めることができる。
【0116】
また、共通する1つの基準点を登録する基準点登録手段を有しているので、操作者がタッチパネル25において所定の操作をするのみで、前記基準点を自動的に登録することができ、容器を保持するラックの位置等の登録作業に要する手間を軽減することができる。
【0117】
なお、本発明では、第1のノズル装着部32aおよび第2のノズル装着部32bに、それぞれ、ノズルチップ300を装着した状態で、基準点を登録する処理を行なうように構成してもよい。
【0118】
以上、本発明の分注装置を、図示の実施形態に基づいて説明したが、本発明はこれに限定されるものではなく、各部の構成は、同様の機能を有する任意の構成のものに置換することができる。また、本発明に、他の任意の構成物が付加されていてもよい。
【0119】
また、本発明では、分注する液体を収納する容器は、試験管のような形状のものに限らず、いかなるものでもよい。また、例えばマイクロプレートのように、複数の容器が一体となったものであってもよい。
【0120】
また、本発明では、x軸、y軸、z軸の各移動機構は、ベルトを利用したものに限定されることなく、いかなる機構でもよく、例えば、ボールねじ等の送りねじ、ラック&ピニオンギアなどを利用した任意の機構とすることができる。
【0121】
また、本発明の分注装置は、分注ヘッドや分注ポンプを3つ以上有するものでもよい。
また、本発明では、分注ポンプは、ノズル装着部またはノズルチップとともに分注ヘッドに対し昇降するように設置されていてもよい。
【図面の簡単な説明】
【0122】
【図1】本発明の分注装置の実施形態を示す斜視図である。
【図2】図1に示す分注装置における第1のx軸方向移動機構および第2のx軸方向移動機構を示す斜視図である。
【図3】図1に示す分注装置における第1のy軸方向移動機構、第1のz軸方向移動機構および第1の分注ヘッドを示す斜視図である。
【図4】図1に示す分注装置の概略的なブロック図である。
【図5】図1に示す分注装置の備える基準点登録装置の概略構成を示す図であり、図5(a)は上面図であり、図5(b)は左側側面図である。
【図6】図1に示す分注装置の備える基準点登録装置によって実行される基準点登録処理のフローチャートである。
【図7】図1に示す分注装置の備える基準点登録装置によって実行される基準点登録処理のフローチャートである。
【符号の説明】
【0123】
1 分注装置
11a 第1のアーム
11b 第2のアーム
12 ガイドレール
13 制御手段
14a 第1のポンプ駆動機構
14b 第2のポンプ駆動機構
16 記憶部
2 装置本体
21 作業台
22 第1の機器収納部
23 第2の機器収納部
24 突出部
25 タッチパネル
26 ガードバー
3a 第1の分注ヘッド
31a フレーム
32a 第1のノズル装着部
33a 配管チューブ
3b 第2の分注ヘッド
32b 第2のノズル装着部
4a 第1のx軸方向移動機構
41a、41b スライドブロック
411 固定部
42a 駆動プーリー
43a 従動プーリー
44a パルスモーター
45a ベルト
4b 第2のx軸方向移動機構
5a 第1のy軸方向移動機構
51a スライドブロック
52a 駆動プーリー
53a 従動プーリー
54a パルスモーター
55a ベルト
5b 第2のy軸方向移動機構
6a 第1のz軸方向移動機構
61a スライドブロック
62a、63a 従動プーリー
64a ベルト
65a パルスモーター
66a プロペラシャフト
67a 固定部材
68a 支持部
6b 第2のz軸方向移動機構
7a 第1の分注ポンプ
10 中点
100 試験管ラック
101 第1アーム用x軸フォトセンサ
102 第2アーム用x軸フォトセンサ
101a、102a ブラケット
103 x軸プレート
104 切欠き部
105 凸部
106 治具
107 yz軸フォトセンサ
200 チップラック
300 ノズルチップ
400 管理システム
B 基準点位置
P1 第1の原点位置
P2 第2の原点位置
Cx x軸方向中心位置
【特許請求の範囲】
【請求項1】
分注する液体を収納する複数の容器が並べて配置される作業台を有する装置本体と、
液体を吸入・吐出するノズルが着脱自在に装着されるノズル装着部を有する複数の分注ヘッドと、
前記各ノズルにそれぞれ液体を吸入・吐出させるための複数の分注ポンプと、
前記各分注ヘッドをそれぞれ前記装置本体に対し水平方向であるx軸方向に移動させる複数のx軸方向移動機構と、
前記各分注ヘッドをそれぞれ前記装置本体に対し水平方向であって前記x軸方向に対し垂直なy軸方向に移動させる複数のy軸方向移動機構と、
前記各ノズルまたは前記各ノズル装着部をそれぞれ前記装置本体に対し垂直方向であるz軸方向に移動させる複数のz軸方向移動機構と、
前記各ノズルまたは前記各ノズル装着部が前記装置本体に対しそれぞれ独立して移動するように、前記各x軸方向移動機構、前記各y軸方向移動機構および前記各z軸方向移動機構を制御する移動機構制御手段とを備える分注装置であって、
前記各x軸方向移動機構、前記各y軸方向移動機構および前記各z軸方向移動機構における、各々の動作に対する共通する1つの基準点を有することを特徴とする分注装置。
【請求項2】
前記移動機構制御手段により、前記各x軸方向移動機構、前記各y軸方向移動機構および前記各z軸方向移動機構を制御して作動させ、前記各分注ヘッドのx軸方向移動量と、前記各分注ヘッドのy軸方向移動量と、前記各ノズルまたは前記各ノズル装着部のz軸方向移動量とを検出し、これらの検出結果に基づいて前記基準点を登録する処理を行なう基準点登録手段を有する請求項1に記載の分注装置。
【請求項3】
分注する液体を収納する複数の容器が並べて配置される作業台を有する装置本体と、
液体を吸入・吐出するノズルが着脱自在に装着される第1のノズル装着部を有する第1の分注ヘッドおよび前記ノズルが着脱自在に装着される第2のノズル装着部を有する第2の分注ヘッドと、
前記第1の分注ヘッドのノズルに液体を吸入・吐出させるための第1の分注ポンプおよび前記第2の分注ヘッドのノズルに液体を吸入・吐出させるための第2の分注ポンプと、
前記第1の分注ヘッドを前記装置本体に対し水平方向であるx軸方向に移動させる第1のx軸方向移動機構および前記第2の分注ヘッドを前記x軸方向に移動させる第2のx軸方向移動機構と、
前記第1の分注ヘッドを前記装置本体に対し水平方向であって前記x軸方向に対し垂直なy軸方向に移動させる第1のy軸方向移動機構および前記第2の分注ヘッドを前記装置本体に対し前記y軸方向に移動させる第2のy軸方向移動機構と、
前記第1の分注ヘッドのノズルまたは前記第1のノズル装着部を前記装置本体に対し垂直方向であるz軸方向に移動させる第1のz軸方向移動機構および前記第2の分注ヘッドのノズルおよび前記第2のノズル装着部を前記装置本体に対し前記z軸方向に移動させる第2のz軸方向移動機構と、
前記第1の分注ヘッドのノズルまたは前記第1のノズル装着部と、前記第2の分注ヘッドのノズルまたは前記第2のノズル装着部とが前記装置本体に対しそれぞれ独立して移動するように、前記第1のx軸方向移動機構、前記第1のy軸方向移動機構、前記第1のz軸方向移動機構、前記第2のx軸方向移動機構、前記第2のy軸方向移動機構および前記第2のz軸方向移動機構を制御する移動機構制御手段とを備える分注装置であって、
前記第1のx軸方向移動機構、前記第1のy軸方向移動機構および前記第1のz軸方向移動機構と、前記第2のx軸方向移動機構、前記第2のy軸方向移動機構および前記第2のz軸方向移動機構とにおける、各々の動作に対する共通する1つの基準点を有することを特徴とする分注装置。
【請求項4】
前記移動機構制御手段により、前記第1のx軸方向移動機構、前記第1のy軸方向移動機構、前記第1のz軸方向移動機構、前記第2のx軸方向移動機構、前記第2のy軸方向移動機構および前記第2のz軸方向移動機構を制御して作動させ、前記第1の分注ヘッドのx軸方向移動量と、前記第1の分注ヘッドのy軸方向移動量と、前記第1の分注ヘッドのノズルまたは前記第1のノズル装着部のz軸方向移動量と、前記第2の分注ヘッドのx軸方向移動量と、前記第2の分注ヘッドのy軸方向移動量と、前記第2の分注ヘッドのノズルまたは前記第2のノズル装着部のz軸方向移動量とを検出し、これらの検出結果に基づいて前記基準点を登録する処理を行なう基準点登録手段を有する請求項3に記載の分注装置。
【請求項5】
前記基準点登録手段は、前記第1の分注ヘッドのノズルまたは前記第1のノズル装着部が第1の原点から前記基準点に移動し、かつ、前記第2の分注ヘッドのノズルまたは前記第2のノズル装着部が第2の原点から前記基準点に移動したときの、前記第1の分注ヘッドのx軸方向移動量と、前記第1の分注ヘッドのy軸方向移動量と、前記第1の分注ヘッドのノズルまたは前記第1のノズル装着部のz軸方向移動量と、前記第2の分注ヘッドのx軸方向移動量と、前記第2の分注ヘッドのy軸方向移動量と、前記第2の分注ヘッドのノズルまたは前記第2のノズル装着部のz軸方向移動量とを求め、これらの移動量に基づいて前記基準点を登録する請求項4に記載の分注装置。
【請求項6】
前記基準点登録手段は、前記基準点と同じx座標上における前記第1の分注ヘッドの有無を検出する第1のx軸方向検出手段と、
前記基準点と同じx座標上における前記第2の分注ヘッドの有無を検出する第2のx軸方向検出手段と、
前記基準点と同じy座標上における前記第1の分注ヘッドの有無と、前記基準点と同じz座標上における前記第1の分注ヘッドのノズルまたは前記第1のノズル装着部の有無と、前記基準点と同じy座標上における前記第2の分注ヘッドの有無と、前記基準点と同じz座標上における前記第2の分注ヘッドのノズルまたは前記第2のノズル装着部の有無とを検出するyz軸方向検出手段とを備え、
前記基準点登録手段は、前記第1の分注ヘッドのノズルまたは前記第1のノズル装着部が第1の原点から前記基準点に移動し、かつ、前記第2の分注ヘッドのノズルまたは前記第2のノズル装着部が第2の原点から前記基準点に移動したときの、前記第1の分注ヘッドのx軸方向移動量と、前記第1の分注ヘッドのy軸方向移動量と、前記第1の分注ヘッドのノズルまたは前記第1のノズル装着部のz軸方向移動量と、前記第2の分注ヘッドのx軸方向移動量と、前記第2の分注ヘッドのy軸方向移動量と、前記第2の分注ヘッドのノズルまたは前記第2のノズル装着部のz軸方向移動量とを求め、これらの移動量に基づいて前記基準点を登録する請求項4に記載の分注装置。
【請求項7】
前記第1のx軸方向検出手段は、前記第1の分注ヘッドに設置され、前記第2のx軸方向検出手段は、前記第2の分注ヘッドに設置され、前記yz軸方向検出手段は、前記作業台に設置される請求項6に記載の分注装置。
【請求項8】
前記yz軸方向検出手段は、着脱自在である請求項6または7に記載の分注装置。
【請求項9】
前記基準点登録手段は、x軸に平行に前記装置本体に設置され、切欠き部を有するx軸プレートを備え、
前記第1のx軸方向検出手段および前記第2のx軸方向検出手段は、それぞれ、前記x軸プレートの切欠き部の有無により、前記基準点と同じx座標上における前記第1の分注ヘッドの有無および前記第2の分注ヘッドの有無を検出し、前記yz軸方向検出手段は、前記第1の分注ヘッドのノズルまたは前記第1のノズル装着部と、前記第2の分注ヘッドのノズルまたは前記第2のノズル装着部とを検出する請求項6ないし8のいずれかに記載の分注装置。
【請求項1】
分注する液体を収納する複数の容器が並べて配置される作業台を有する装置本体と、
液体を吸入・吐出するノズルが着脱自在に装着されるノズル装着部を有する複数の分注ヘッドと、
前記各ノズルにそれぞれ液体を吸入・吐出させるための複数の分注ポンプと、
前記各分注ヘッドをそれぞれ前記装置本体に対し水平方向であるx軸方向に移動させる複数のx軸方向移動機構と、
前記各分注ヘッドをそれぞれ前記装置本体に対し水平方向であって前記x軸方向に対し垂直なy軸方向に移動させる複数のy軸方向移動機構と、
前記各ノズルまたは前記各ノズル装着部をそれぞれ前記装置本体に対し垂直方向であるz軸方向に移動させる複数のz軸方向移動機構と、
前記各ノズルまたは前記各ノズル装着部が前記装置本体に対しそれぞれ独立して移動するように、前記各x軸方向移動機構、前記各y軸方向移動機構および前記各z軸方向移動機構を制御する移動機構制御手段とを備える分注装置であって、
前記各x軸方向移動機構、前記各y軸方向移動機構および前記各z軸方向移動機構における、各々の動作に対する共通する1つの基準点を有することを特徴とする分注装置。
【請求項2】
前記移動機構制御手段により、前記各x軸方向移動機構、前記各y軸方向移動機構および前記各z軸方向移動機構を制御して作動させ、前記各分注ヘッドのx軸方向移動量と、前記各分注ヘッドのy軸方向移動量と、前記各ノズルまたは前記各ノズル装着部のz軸方向移動量とを検出し、これらの検出結果に基づいて前記基準点を登録する処理を行なう基準点登録手段を有する請求項1に記載の分注装置。
【請求項3】
分注する液体を収納する複数の容器が並べて配置される作業台を有する装置本体と、
液体を吸入・吐出するノズルが着脱自在に装着される第1のノズル装着部を有する第1の分注ヘッドおよび前記ノズルが着脱自在に装着される第2のノズル装着部を有する第2の分注ヘッドと、
前記第1の分注ヘッドのノズルに液体を吸入・吐出させるための第1の分注ポンプおよび前記第2の分注ヘッドのノズルに液体を吸入・吐出させるための第2の分注ポンプと、
前記第1の分注ヘッドを前記装置本体に対し水平方向であるx軸方向に移動させる第1のx軸方向移動機構および前記第2の分注ヘッドを前記x軸方向に移動させる第2のx軸方向移動機構と、
前記第1の分注ヘッドを前記装置本体に対し水平方向であって前記x軸方向に対し垂直なy軸方向に移動させる第1のy軸方向移動機構および前記第2の分注ヘッドを前記装置本体に対し前記y軸方向に移動させる第2のy軸方向移動機構と、
前記第1の分注ヘッドのノズルまたは前記第1のノズル装着部を前記装置本体に対し垂直方向であるz軸方向に移動させる第1のz軸方向移動機構および前記第2の分注ヘッドのノズルおよび前記第2のノズル装着部を前記装置本体に対し前記z軸方向に移動させる第2のz軸方向移動機構と、
前記第1の分注ヘッドのノズルまたは前記第1のノズル装着部と、前記第2の分注ヘッドのノズルまたは前記第2のノズル装着部とが前記装置本体に対しそれぞれ独立して移動するように、前記第1のx軸方向移動機構、前記第1のy軸方向移動機構、前記第1のz軸方向移動機構、前記第2のx軸方向移動機構、前記第2のy軸方向移動機構および前記第2のz軸方向移動機構を制御する移動機構制御手段とを備える分注装置であって、
前記第1のx軸方向移動機構、前記第1のy軸方向移動機構および前記第1のz軸方向移動機構と、前記第2のx軸方向移動機構、前記第2のy軸方向移動機構および前記第2のz軸方向移動機構とにおける、各々の動作に対する共通する1つの基準点を有することを特徴とする分注装置。
【請求項4】
前記移動機構制御手段により、前記第1のx軸方向移動機構、前記第1のy軸方向移動機構、前記第1のz軸方向移動機構、前記第2のx軸方向移動機構、前記第2のy軸方向移動機構および前記第2のz軸方向移動機構を制御して作動させ、前記第1の分注ヘッドのx軸方向移動量と、前記第1の分注ヘッドのy軸方向移動量と、前記第1の分注ヘッドのノズルまたは前記第1のノズル装着部のz軸方向移動量と、前記第2の分注ヘッドのx軸方向移動量と、前記第2の分注ヘッドのy軸方向移動量と、前記第2の分注ヘッドのノズルまたは前記第2のノズル装着部のz軸方向移動量とを検出し、これらの検出結果に基づいて前記基準点を登録する処理を行なう基準点登録手段を有する請求項3に記載の分注装置。
【請求項5】
前記基準点登録手段は、前記第1の分注ヘッドのノズルまたは前記第1のノズル装着部が第1の原点から前記基準点に移動し、かつ、前記第2の分注ヘッドのノズルまたは前記第2のノズル装着部が第2の原点から前記基準点に移動したときの、前記第1の分注ヘッドのx軸方向移動量と、前記第1の分注ヘッドのy軸方向移動量と、前記第1の分注ヘッドのノズルまたは前記第1のノズル装着部のz軸方向移動量と、前記第2の分注ヘッドのx軸方向移動量と、前記第2の分注ヘッドのy軸方向移動量と、前記第2の分注ヘッドのノズルまたは前記第2のノズル装着部のz軸方向移動量とを求め、これらの移動量に基づいて前記基準点を登録する請求項4に記載の分注装置。
【請求項6】
前記基準点登録手段は、前記基準点と同じx座標上における前記第1の分注ヘッドの有無を検出する第1のx軸方向検出手段と、
前記基準点と同じx座標上における前記第2の分注ヘッドの有無を検出する第2のx軸方向検出手段と、
前記基準点と同じy座標上における前記第1の分注ヘッドの有無と、前記基準点と同じz座標上における前記第1の分注ヘッドのノズルまたは前記第1のノズル装着部の有無と、前記基準点と同じy座標上における前記第2の分注ヘッドの有無と、前記基準点と同じz座標上における前記第2の分注ヘッドのノズルまたは前記第2のノズル装着部の有無とを検出するyz軸方向検出手段とを備え、
前記基準点登録手段は、前記第1の分注ヘッドのノズルまたは前記第1のノズル装着部が第1の原点から前記基準点に移動し、かつ、前記第2の分注ヘッドのノズルまたは前記第2のノズル装着部が第2の原点から前記基準点に移動したときの、前記第1の分注ヘッドのx軸方向移動量と、前記第1の分注ヘッドのy軸方向移動量と、前記第1の分注ヘッドのノズルまたは前記第1のノズル装着部のz軸方向移動量と、前記第2の分注ヘッドのx軸方向移動量と、前記第2の分注ヘッドのy軸方向移動量と、前記第2の分注ヘッドのノズルまたは前記第2のノズル装着部のz軸方向移動量とを求め、これらの移動量に基づいて前記基準点を登録する請求項4に記載の分注装置。
【請求項7】
前記第1のx軸方向検出手段は、前記第1の分注ヘッドに設置され、前記第2のx軸方向検出手段は、前記第2の分注ヘッドに設置され、前記yz軸方向検出手段は、前記作業台に設置される請求項6に記載の分注装置。
【請求項8】
前記yz軸方向検出手段は、着脱自在である請求項6または7に記載の分注装置。
【請求項9】
前記基準点登録手段は、x軸に平行に前記装置本体に設置され、切欠き部を有するx軸プレートを備え、
前記第1のx軸方向検出手段および前記第2のx軸方向検出手段は、それぞれ、前記x軸プレートの切欠き部の有無により、前記基準点と同じx座標上における前記第1の分注ヘッドの有無および前記第2の分注ヘッドの有無を検出し、前記yz軸方向検出手段は、前記第1の分注ヘッドのノズルまたは前記第1のノズル装着部と、前記第2の分注ヘッドのノズルまたは前記第2のノズル装着部とを検出する請求項6ないし8のいずれかに記載の分注装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2006−10654(P2006−10654A)
【公開日】平成18年1月12日(2006.1.12)
【国際特許分類】
【出願番号】特願2004−192220(P2004−192220)
【出願日】平成16年6月29日(2004.6.29)
【出願人】(390029791)アロカ株式会社 (899)
【Fターム(参考)】
【公開日】平成18年1月12日(2006.1.12)
【国際特許分類】
【出願日】平成16年6月29日(2004.6.29)
【出願人】(390029791)アロカ株式会社 (899)
【Fターム(参考)】
[ Back to top ]