
分注装置
【課題】液垂れ、エアギャップの発生を効果的に低減でき得る分注装置を提供する。
【解決手段】分注装置10は、ノズルチップ30と、当該ノズルチップ30を移動させる移動機構20と、当該ノズルチップ30の内圧を可変することで液体の吸引および吐出を実行させる分注ポンプ16と、記憶部25と、前記移動機構20および分注ポンプ16の駆動を制御する制御部24と、を備えている。記憶部25には、ノズルチップ30での液体吸引完了から液体吐出開始までの間にノズルチップ内で生じる液体蒸発に伴う内圧上昇を相殺し得るエア吸引速度を含むエア吸引条件がエア吸引設定情報として記憶されている。制御部は、ノズルチップ30での液体吸引完了から液体吐出開始までの間にエア吸引設定情報に規定されたエア吸引条件でのエア吸引を分注ポンプ16に指示する。
【解決手段】分注装置10は、ノズルチップ30と、当該ノズルチップ30を移動させる移動機構20と、当該ノズルチップ30の内圧を可変することで液体の吸引および吐出を実行させる分注ポンプ16と、記憶部25と、前記移動機構20および分注ポンプ16の駆動を制御する制御部24と、を備えている。記憶部25には、ノズルチップ30での液体吸引完了から液体吐出開始までの間にノズルチップ内で生じる液体蒸発に伴う内圧上昇を相殺し得るエア吸引速度を含むエア吸引条件がエア吸引設定情報として記憶されている。制御部は、ノズルチップ30での液体吸引完了から液体吐出開始までの間にエア吸引設定情報に規定されたエア吸引条件でのエア吸引を分注ポンプ16に指示する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ノズルを含む配管系の内圧をポンプで可変することで、当該ノズルで液体を吸引および吐出する分注装置に関する。
【背景技術】
【0002】
従来から、液体を吸引元容器から吸引し、吐出先容器へ吐出する分注装置が広く知られている。かかる分注装置においては、ノズルで液体を吸引してから吐出するまでの間に、液垂れや、エアギャップ、ひいては、当該エアギャップを介して液体がノズル先端に溜まる液溜まり等を確実に防止することが望まれている。
【0003】
ここで、液垂れ発生の原因の一つとして、ノズル内で、吸引された液体が蒸発(気化)することが挙げられる。すなわち、吸引元容器から吐出先容器にノズルが移動する間、換言すれば、ノズル先端が液面から離れた状態(空中にある状態)になっているとき、ノズル内の液体が蒸発することにより配管系の内圧が上昇する。そして、この上昇に伴い、当該配管系内圧があるピーク圧を超えるとノズルの先端開口より液体が押し出されて、液垂れが発生する場合がある。この液垂れが生じると、装置が汚れたり、液体が無駄になったり、さらには垂れ落ちた液滴が他の容器に混入してコンタミネーションを起こしたりするので、液垂れを防止する必要がある。
【0004】
このような液垂れの発生を防止するために、液体を吸引したノズルを吐出先の容器へ移動する途中で分注ポンプに一定量の吸引(液垂れ防止吸引)を行わせることが提案されている。しかしながら、液垂れ防止吸引時の吸引量が多いと、ノズルの先端開口から空気が流入してノズル先端にエアギャップを作るおそれがある。エアギャップができた場合、時間が経過するとエアギャップを介してノズルの先端開口に液溜まりが生じるので、液体の吐出動作を行ったときに泡を作ったり、液垂れが発生したときに液滴ではなく気泡がノズルの先端開口部から飛び出し、この気泡が弾けて試料が飛散してコンタミネーションを生じたりする等の不都合が生じる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2003−194835号公報
【特許文献2】特許2005−321342号公報
【特許文献3】特許2005−300236号公報
【特許文献4】特許第2939180号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
そこで、特許文献1〜3などには、吸引後の圧力を監視し、圧力上昇を相殺するようにポンプでエア吸引する技術が開示されている。かかる技術によれば、上述した液垂れ等の問題を多少は低減できる。しかし、リファレンスとして取得する吸引直後の圧力が、機械的振動や配管系の漏れなどで正しい値を示さない場合も多い。また、液垂れが発生するピーク圧は液圧やノズルの状態により必ずしも一定でない。そのため、圧力を監視してエア吸引量を制御する従来の方法では、液垂れやエアギャップ等を効果的に防止することは困難であった。
【0007】
また、特許文献4には、ノズルで液体を吸引した後、微小流量の空気を吸引し続け、チップ内の液体に気泡を連続して発生させることで液垂れを防止する技術が開示されている。しかし、かかる微小気泡は、吐出量の誤差の原因になったりするため、当該技術では、好適な分注処理が出来ない場合があった。
【0008】
そこで、本発明は、液垂れ、エアギャップの発生を効果的に低減でき得る分注装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
液体の吸引および吐出を行う分注装置であって、その内部に液体が保持されるノズルと、前記ノズルを移動させる移動機構と、前記ノズルを含む配管系の内圧を変化させることで、前記ノズルでの液体吸引および吐出を実行させるポンプと、少なくとも、前記ノズルでの液体吸引完了から液体吐出開始までの間にノズル内で生じる液体蒸発に伴う内圧上昇を相殺し得る前記ノズル内のエア吸引速度を含むエア吸引条件をエア吸引設定情報として予め記憶した記憶手段と、前記移動機構およびポンプの駆動を制御する制御手段であって、前記ノズルでの液体吸引完了から液体吐出開始までの間に前記エア吸引設定情報に規定されたエア吸引条件でのエア吸引を前記ポンプに指示する制御手段と、を備えることを特徴とする。
【0010】
好適な態様では、前記エア吸引条件は、さらに、吸引するエア量の上限値も含み、前記制御手段は、前記エア吸引により吸引するエア吸引量が、前記上限値に達した場合には前記液体吐出開始前であっても、前記エア吸引を停止させる。
【0011】
他の好適な態様では、前記エア吸引設定情報は、前記ノズルでの液体吸引条件ごとに異なる複数のエア吸引条件を記憶しており、前記制御部は、実際に行う液体吸引の条件に基づいて、当該実際に行う液体吸引に適したエア吸引条件を選択する。この場合、前記液体吸引条件は、液体吸引量、液体種類、ノズル種類、温度、湿度の少なくとも一つを含む、ことが望ましい。
【0012】
他の好適な態様では、前記エア吸引速度は、前記液体吸引完了からの経過時間に応じて変化する可変値である。他の好適な態様では、前記制御部は、分注処理の進行に伴い前記ノズル内の液体量が変化した場合には、前記エア吸引条件を再設定する。
【発明の効果】
【0013】
本発明によれば、液体蒸発に伴う内圧上昇を相殺し得るエア吸引速度でエア吸引を行うことができるため、液垂れ、エアギャップの発生を効果的に低減できる。
【図面の簡単な説明】
【0014】
【図1】本発明の実施形態である分注装置の概略構成図でる。
【図2】配管系周辺の概略構成図である。
【図3】配管系内圧の変化の一例を示すグラフである。
【図4】液体吸引量と限界経過時間との関係を示すグラフである。
【図5】エア吸引設定情報の一例を示す図である。
【図6】エア吸引速度の一例を示すグラフである。
【図7】分注処理の流れを示すフローチャートである。
【図8】分注処理の流れを示すフローチャートである。
【図9】他の分注処理の流れを示すフローチャートである。
【図10】他の分注処理の流れを示すフローチャートである。
【発明を実施するための形態】
【0015】
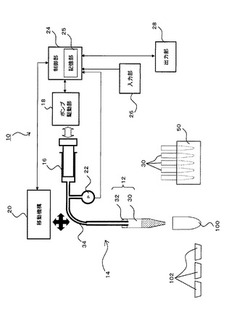
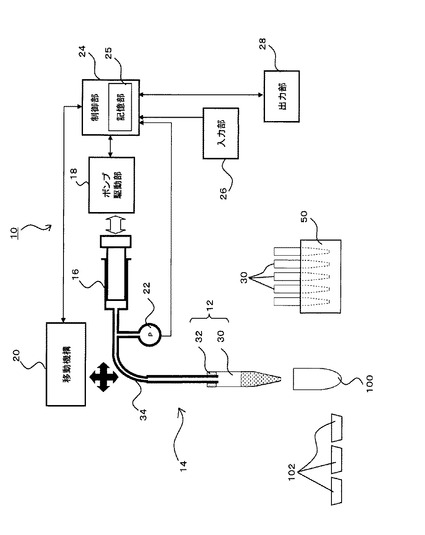
以下、本発明の実施形態について図面を参照して説明する。図1は、本発明の実施形態である分注装置10の概略構成図である。また、図2は、分注装置10のうちノズル部12を含む配管系14および分注ポンプ16周辺のみを抽出した概略構成図である。
【0016】
この分注装置10は、吸引元容器100に収容された液体、例えば、血液などの体液や薬液などをノズルチップ30で吸引し、1以上の吐出先容器102に吐出し、分注する装置である。この分注装置10は、図1から明らかなとおり、ノズル部12および配管34を含む配管系14、分注ポンプ16、移動機構20、入力部26、出力部28、および、制御部24などを備えている。
【0017】
ノズル部12は、実際に液体を吸引吐出するノズルチップ30と当該ノズルチップ30が装着される装着部32などを含んでいる。ここで、本実施形態では、ノズルチップ30として、使用のたびに廃棄・交換が可能なディスポーザブル方式のノズルチップ30を用いている。そのため、分注装置10の内部または近傍には、多数の未使用のノズルチップ30がラック50などに保持された状態で保管されている。また、分注装置10の内部または近傍には、使用済みのノズルチップ30を貯蔵するダスト空間(図示せず)が形成されており、当該ダスト空間近傍には、ノズルチップ30の廃棄作業を行うためのチップ廃棄位置が設定されている。
【0018】
なお、当然ながら、ディスポーザブル方式のノズルチップ30に代えて、洗浄を介在させながら繰り返し使用するノズルチップ30を用いてもよい。そして、いずれの態様のノズルチップ30を用いるにしても、要求される液体の吸引量および吐出量(目標液体吸引量および目標液体吐出量)に応じて、適宜、異なる形状のノズルチップ30が選択できることが望ましい。すなわち、比較的、大量の液体の吸引・吐出が必要な場合には大サイズのノズルチップ30を、比較的、少量の液体の吸引・吐出が必要な場合には小サイズのノズルチップ30を、用いることができるように構成することが望ましい。
【0019】
ノズルチップ30は、その一端が配管34に連結されたチップ装着部32の他端に嵌合により装着される。そして、このノズルチップ30やチップ装着部32を含むノズル部12は、移動機構20により、三次元的に移動させられる。なお、移動機構20の駆動は、制御部24により制御される。
【0020】
このノズル部12は、配管34を介して分注ポンプ16に連結されている。分注ポンプ16は、ノズル部12および配管34からなる配管系14の内圧を可変するものである。この分注ポンプ16は、適宜、内圧を可変できるのであれば、その種類は特に限定されないが、本実施形態では、シリンダ40とプランジャ42とから構成されシリンジポンプを用いている。この分注ポンプ16の駆動は、ポンプ駆動部18を介して制御部24により制御される。ノズル部12と分注ポンプ16との間には、配管系14の内圧を計測する圧力センサ22が設けられている。この圧力センサ22での検出値は、適宜、制御部24に出力され、各種制御、例えば、液面検出などに利用される。
【0021】
入力部26は、ユーザからの指示等を受けつけるユーザインターフェースの一部で、キーボードやタッチパネルなどを含むことができる。ユーザは、この入力部26を操作して、吸引する液体の種類や、目標液体吸引量、目標液体吐出量、吐出回数などの分注条件等を入力する。入力された分注条件は、制御部24に入力され、制御部24は、当該分注条件に基づいて、各部の駆動を制御する。出力部28は、各種情報をユーザに提示するユーザインターフェースの一部で、ディスプレイやスピーカ、LEDランプなどを含むことができる。
【0022】
制御部24は、分注装置10全体の駆動を制御するもので、より具体的には、入力部26を介して入力された指示に基づいて、分注ポンプ16や移動機構20の駆動を制御し、分注処理を実行させる。
【0023】
また、この制御部24は、メモリやハードディスクなどからなる記憶部25を有しており、当該記憶部25には、後述するエア吸引設定情報が記憶されている。エア吸引設定情報は、ノズルチップ30先端からの液垂れやエアギャップ等の発生を防止または低減するために、分注ポンプ16が行う極低速でのエア吸引の条件(エア吸引パラメータ)を含む情報であるが、これについては後に詳説する。
【0024】
次に、この分注装置10で行われる分注処理の大まかな流れを説明する。ユーザから分注処理開始が指示された場合、制御部24は、移動機構20を駆動して、新たなノズルチップ30が装着されたノズル部12を吸引元容器100へと移動させる。そして、その状態で、分注ポンプ16を駆動し、ノズルチップ内に、目標液体吸引量の液体を吸引させる。目標液体吸引量が吸引できた場合には、続いて、移動機構20を駆動して、ノズルチップ30を吐出先容器102へと移動させる。そして、分注ポンプ16を駆動して、目標液体吐出量の液体をノズルチップ30から吐出先容器102へと吐出させる。
【0025】
ここで、従来、このノズルチップ30による液体吸引完了後、吐出先容器102へノズル部12を移動させる途中で、ノズルチップ30の先端から液体が押し出される液垂れなどが発生することがあった。かかる液垂れが発生すると、装置が汚れたり、液体が無駄になったり、さらには垂れ落ちた液滴が他の容器に混入してコンタミネーションを起こしたりするという問題があった。
【0026】
かかる液垂れは、ノズルチップ内で吸引された液体が蒸発するなどの理由により発生すると考えられる。すなわち、ノズルチップ30での液体吸引が完了すると、その後は、ノズルチップ内の液面から蒸発が起こる。そして、ノズルチップ30の内部に蒸気が拡散することにより、配管系内圧が上昇する。この配管系内圧によりノズルチップ内の液体が外側に押される力が、ノズルチップ30先端の表面張力の臨界値を超えると、液垂れが発生する。
【0027】
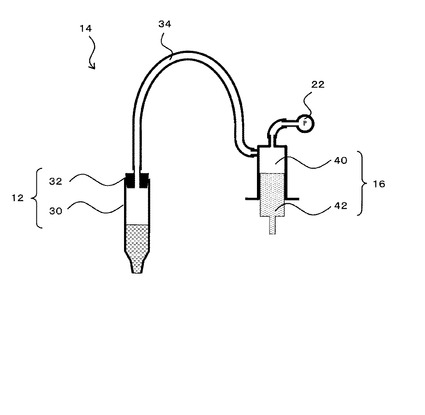
図3は、この液垂れ発生前後における配管系内圧の変化の一例を示すグラフである。横軸は、液体吸引完了してノズルチップ30の先端が液面から離れてからの経過時間を、縦軸は、時刻0での配管系内圧を基準にした圧力増加量を示している。この図3に図示するとおり、時刻0でノズルチップ30が液面から離れた後は、ノズルチップ内に吸引された液体が微量ながら蒸発(気化)していくため、徐々に配管系内圧が上昇する。この内圧上昇は、図3において破線で示すように、指数関数的に増加する。ただし、通常は、その上昇の過程において、配管系内圧が、液垂れが発生するピーク圧Pmaxに到達し、液垂れが発生する。図示例では、時刻t1において、配管系内圧がピーク圧Pmaxに到達する。この場合、当該内圧により液体が押し出されて、ノズルチップ30の先端から液体が垂れる液垂れが発生する。液垂れ発生後は、図3に図示するとおり、配管系内圧は、急激に低下する。なお、既述したとおり、通常、配管系内圧は、指数関数的に増加、換言すれば、液体吸引してからの経過時間が経つにつれ、内圧上昇率は徐々に低下する。これは、時間が経過するにつれ、ノズルチップ内の液面付近が、飽和状態に近づき、蒸発速度が遅くなるためと推測される。
【0028】
本実施形態では、こうした液垂れを防止または低減するために、液体吸引完了から液体吐出までの間、上述した液体蒸発に伴う内圧上昇を相殺するべく、ノズルチップ内の気体を分注ポンプ16で吸引するエア吸引を行うようにしている。このエア吸引は、ノズルチップ30の先端にエアギャップが生じないように、極低速で行う。かかるエア吸引動作を実行することにより、液垂れを防止または低減することができる。ただし、本発明は、従来技術と異なり、このエア吸引を予め記憶部25に記憶されたエア吸引設定情報に基づいて行うようにしている。
【0029】
すなわち、従来においても、液体吸引後の配管系内圧を圧力センサで監視し、当該内圧上昇を相殺するように分注ポンプ16でエア吸引する技術が提案されている。しかし、かかる手法で液垂れを防止するためには、高精度で応答性に優れた圧力センサが必要となり、コスト増加の原因となる。また、検出される液体吸引完了直後の圧力値は、機械的振動や配管系14の漏れなどで正しい値を示さないこともあった。さらに、液垂れが発生するピーク圧が、液性やチップの状態により必ずしも一定していないという問題もあった。そのため、従来の配管系内圧を監視結果に応じてエア吸引する技術では、液垂れを効果的に防止または低減することは出来なかった。
【0030】
一方、本実施形態では、このエア吸引を、予め記憶部25に記憶されたエア吸引設定情報に基づいて行う。エア吸引設定情報は、各種分注条件(ノズルチップ30の形状や液体の種類、目標吸引量など)ごとに予め規定されたエア吸引条件、より具体的には、エア吸引速度va、エア量上限値Vaなどが記録されたもので、事前の実験結果などに基づいて規定される。そして、かかる事前規定されたエア吸引条件に基づいてエア吸引を実行することで、より確実に、液垂れを防止または低減することができる。
【0031】
ここで、このエア吸引設定情報の詳細説明に先立って、液垂れ発生に関与する各種パラメータについて簡単に説明する。まず、液垂れが発生する配管系14の内圧であるピーク圧について検討する。液体吸引直後を基準にとると液垂れが発生するピーク圧Pmaxは、Pmax=2×σ/(d/2)と推測することができる。なお、σは液体の表面張力、dはノズルチップ30の先端内径である。そして、この式から明らかなとおり、ピーク圧は、吸引される液体の種類(表面張力)およびノズルチップ30の種類(先端内径)に依存することが分かる。
【0032】
また、液垂れ発生時点における蒸気量、すなわち、限界蒸気量Eを検討すると、液垂れが発生する直前の圧力から、その時点での蒸発量Eは、E=Pmax/P0×V0と推測できる。ここで、V0はノズルチップ30を含む配管系14のデッドボリューム(液体が存在しない空間体積)であり、P0は大気圧である。ノズルチップ内で発生する蒸気量が、この限界蒸気量Eに到達すると、液垂れが発生することになる。
【0033】
ここで、液体吸引完了後、液垂れが発生(すなわち発生する蒸気量が限界蒸気量Eに到達)するまでの経過時間(以下、「限界経過時間Tmax」と呼ぶ)は、ノズルチップ30周辺での温度や湿度といった環境条件によっても異なるが、ノズルチップ内に吸引された液体吸引量によっても異なっている。
【0034】
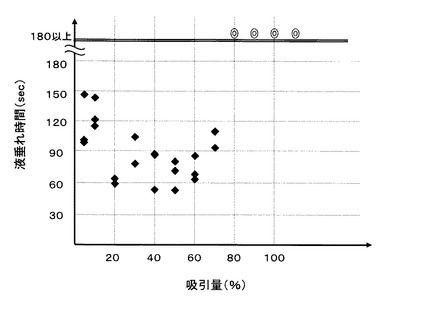
図4は、ノズルチップ内に吸引された液体吸引量による限界経過時間Tmaxの違いを示すグラフである。より具体的には、この図4は、温度・湿度を一定に保ち、同一形状のノズルチップ30を用いて、蒸留水を吸引した際の限界経過時間Tmaxを、液体吸引量ごとに調べた実験結果を示すグラフである。この図4において、横軸は、液体吸引量を、縦軸は、限界経過時間Tmaxを示している。なお、液体吸引量は、ノズルチップ30の容量に対するパーセンテージで示している。例えば、当該実験で用いたノズルチップ30の規定容量が1000μLである場合において、200μLの液体を吸引した場合の液体吸引量は「20%」として示している。
【0035】
この図4から明らかなとおり、液体吸引量が、ノズルチップ容量の20%未満の場合は、液垂れを発生させることなく、90秒以上、液体をノズルチップ内で保持することが出来ている。一方、液体吸引量が、ノズルチップ容量の20%以上になると、限界経過時間Tmaxは、低下し、比較的、短時間で液垂れが発生することがわかる。しかしながら、液体吸引量が、ノズルチップ容量の70%になると、限界経過時間Tmaxは、若干長くなる。そして、液体吸引量がノズルチップ容量の80%以上になると限界経過時間Tmaxは大幅に増加し、液垂れを発生させることなく、180秒以上、液体をノズルチップ内で保持することが出来るようになる。
【0036】
つまり、少量および多量の液体を吸引する場合、限界経過時間Tmaxは長くなりがちであるが、中間量の液体を吸引する場合、限界経過時間Tmaxは短くなりがちになる。かかる傾向がみられる理由としては、次のようなことが考えられる。液体吸引量が大きい場合、ノズルチップ内部のエア体積(デッドボリューム)は小さくなる。そのため、比較的早い段階で飽和状態に近づき、さらなる蒸発が生じにくくなる。その結果、発生する蒸発量も少なくなり、液垂れも起こりにくくなると考えられる。また、液体吸引量が小さい場合、ノズルチップ内部のエア体積(デッドボリューム)は大きくなるが、蒸発する液面面積が小さくなる。そのため、蒸発速度は遅くなり、液垂れも起こりにくくなると考えられる。
【0037】
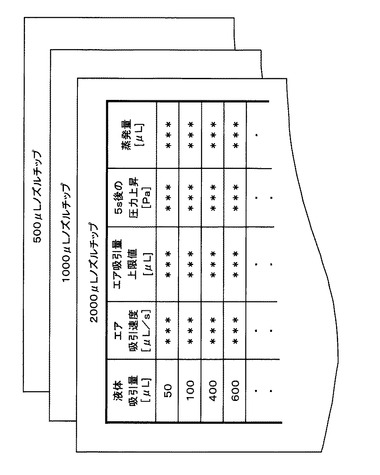
エア吸引設定情報は、上述したような液垂れ発生に関与する各種条件を考慮し、予め行われた各種実験結果に基づいて規定される。図5は、本実施形態で用いるエア吸引設定情報の一例を示す図である。なお、図5においては、各項目の値を「***」と図示しているが、実際には、具体的数値が記憶さている。
【0038】
この図5に図示するとおり、エア吸引設定情報では、各液体吸引量(すなわち目標液体吸引量)ごとに、エア吸引時条件(具体的にはエア吸引速度vaおよびエア量上限値Va)を規定している。また、このエア吸引条件は、ノズルチップ30の種類(形状)ごとに用意されている。
【0039】
かかるエア吸引条件は、事前に行われる実験などに基づいて規定される。例えば、各液体吸引量ごとに、液体吸引完了から5秒経過後における配管系内圧の上昇量を測定する。この圧力上昇量から、液体の蒸発速度を推定する。そして、この蒸発を相殺でき得るエア吸引速度vaを求める。そして、得られたエア吸引速度vaを、図5に示す表のような形式にまとめ、エア吸引設定情報として記憶部25に記憶しておく。
【0040】
また、図3を用いて説明したように、ノズルチップ内の液面付近が飽和状態になれば、液体の蒸発が殆ど生じなくなり、内圧も上昇しなくなる。かかる飽和状態においてエア吸引を続行した場合には、エアギャップが生じる恐れがある。そこで、本実施形態では、エア吸引量Vaの上限値も設定し、エア吸引量が当該上限値Vaに達すればエア吸引を停止する。
【0041】
ここで、このエア量上限値Vaは、予め行われる実験などにより算出され、記憶される。すなわち、エア量上限値Vaを規定する際には、図3のグラフのような液体吸引後における内圧の変化を、予め実験等により求めておく。そして、この内圧の変化から、ノズルチップ内の液面付近が飽和状態になるとき、すなわち、内圧の変化が殆ど無くなるときの内圧を推定する。そして、この飽和時点における内圧に基づいて、飽和時点における蒸気量を算出し、この算出された蒸気量をエア量上限値Vaとして規定すればよい。
【0042】
なお、この図5で例示したエア吸引設定情報は、一例であり、当然、他の形式のエア吸引設定情報を用いてもよい。例えば、本例では、5秒経過後における内圧上昇量および蒸発量も記憶しているが、これらの数値は、実際のエア吸引動作制御に利用されないため、当然、省略されてもよい。また、少なくともエア吸引速度vaが記憶されているのであれば、エア量上限値Vaも省略されてもよい。
【0043】
また、本例では、液体吸引量およびノズルチップ30の種類ごとに、エア吸引速度va等を規定しているが、さらに、環境条件(温度や湿度)ごとにもエア吸引条件を作成してもよい。逆に、さまざまな分注条件に対応したエア吸引条件を規定するのではなく、特定の分注条件に対応したエア吸引条件を一つだけ規定しておき、適宜、実際に分注する際の分注条件に対応した補正計数を当該一つのエア吸引条件に乗算して、エア吸引パラメータを求めるようにしてもよい。例えば、蒸留水を1000μLのノズルチップ30で100μL吸引した際のエア吸引速度vaおよびエア量上限値Vaだけをエア吸引条件として記憶部25に記憶しておく。そして、実際に蒸留水ではなく、血清を1000μLのノズルチップ30で100μL吸引する場合には、記憶されているエア吸引速度vaおよびエア量上限値Vaに規定の補正計数を乗算し、血清に適したエア吸引速度vaおよびエア量上限値Vaに補正して用いるようにしてもよい。また、その他の条件、液体吸引量やノズルチップ30の種類、温度、湿度などについても、同様に、適宜、補正計数を乗算するなどして補正するようにしてもよい。
【0044】
また、本例では、マトリックス形式のエア吸引設定情報を例示しているが、エア吸引速度vaやエア量上限値Vaを、ノズルチップ30の形状や、液体吸引量、温度、湿度、液体種類などの関数として表現したものをエア吸引設定情報として記憶するようにしてもよい。
【0045】
また、これまでの説明では、分注条件(ノズルチップ30種類、液体吸引量、温度、湿度、液体種類)が一定の場合、エア吸引速度も一定とする場合のみを例示したが、分注条件一定でも、エア吸引速度vaを可変させるようにしてもよい。例えば、ノズルチップ30での液体吸引完了してからの経過時間に応じて、エア吸引速度vaを可変させてもよい。
【0046】
図6は、この場合において採用可能なエア吸引速度vaの一例を示す図である。図6において、横軸は、液体吸引完了してからの経過時間を、縦軸は、エア吸引量を示している。図6における太実線は、図5で例示したエア吸引設定情報に従った場合のエア吸引量の変化を示している。
【0047】
この太実線で示すようにエア吸引速度を一定にしてもよいが、図6において、破線で示すように、間欠的にエア吸引を行う(換言すれば、エア吸引速度vaをゼロと一定値との間で繰り返し変化させる)ようにしてもよい。このように間欠的にエア吸引を行うことにより、エアギャップの形成を効果的に防止または低減できる。
【0048】
また、別の態様として、図6において細実線で図示するように、エア吸引速度vaを複数段階(図示例では二段階)に変化させてもよい。このように複数段階に変化させる場合には、経過時間が長くなるほど、エア吸引速度vaを小さくすることが望ましい。これは、経過時間が長くなるほど、ノズルチップ内の液面周辺が飽和状態に近づき、蒸発速度が遅く、ひいては、圧力上昇速度が遅くなるためである。
【0049】
また、細実線のように段階的に変化させるのではなく、図6において、一点鎖線で図示するように、エア吸引速度vaを連続的に変化させてもよい。このように連続的に変化させる場合には、エア吸引量の波形が、図3において破線で図示した配管系内圧の上昇波形に対応するように、エア吸引速度を設定することが望ましい。
【0050】
いずれにしても、上述したように、予め、実験等により液垂れを防止でき得るエア吸引速度va等を求めて記憶しておき、実際の分注処理時には、当該記憶されたエア吸引速度vaでエア吸引を行うことにより、液垂れやエアギャップの発生率を大幅に低減できる。
【0051】
次に、この分注装置10での分注処理の流れについて詳説する。当該分注装置10で行われる分注処理の態様として、種々考えられるが、ここでは、次の三つの態様について説明する。一つは、吸引元容器100から、目標液体吐出量の液体を1回吸引し、当該液体を吐出先容器102へ1回吐出してから、ノズルチップ30を廃棄・交換する1対1式分注である。もう一つは、吸引元容器100から、目標液体吐出量×N相当の量の液体を1回で吸引し、当該液体をN個の吐出先容器102へ順次吐出してから、ノズルチップ30を廃棄・交換する1対N式分注である。最後の一つは、吸引元容器100から、目標液体吐出量の液体を1回吸引し、当該液体を吐出先容器102へ1回吐出する動作を複数回、同じノズルチップ30で繰り返してから、ノズルチップ30を廃棄・交換する再吸引式分注である。以下、各分注処理の流れについて図面を参照して詳説する。
【0052】
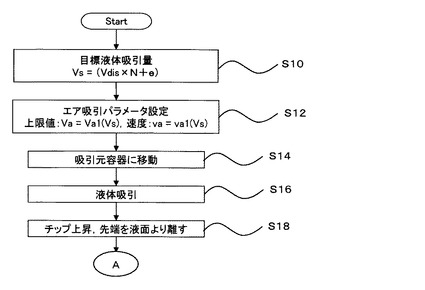
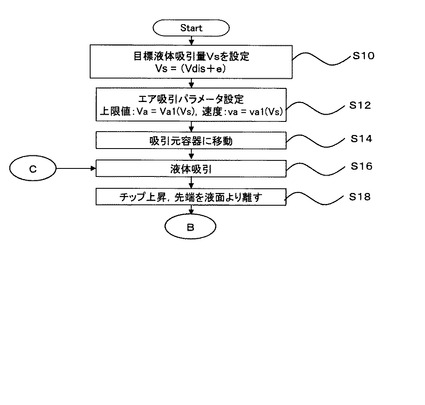
図7、図8は、1対1式分注の処理の流れを示すフローチャートである。1対1式分注を行う場合、制御部24は、まず、入力部26を介して入力された各種分注条件に基づいて、目標液体吸引量Vsを設定する(S10)。この目標吸引量Vsは、目標液体吐出量Vdisにエクセス量eを加算した値である。なお、図7、図8において、「N」は吐出回数指令値を意味しており、1対1式分注の場合には、常にN=1である。
【0053】
続いて、制御部24は、入力部26を介して入力された各種分注条件(目標吸引量、ノズルチップ30の種類、液体種類、温度、湿度など)、および、記憶部25に記憶されているエア吸引設定情報に基づいて、エア吸引パラメータを設定する(S12)。すなわち、制御部24は、入力された分注条件に対応したエア吸引速度va、エア量上限値Vaを決定し、メモリに一時記憶しておく。
【0054】
続いて、制御部24は、移動機構20を駆動させて、ノズル部12を吸引元容器100へと移動させる(S14)。より具体的には、まず、ノズル部12を水平移動させて吸引元容器100の真上に位置させる。続いて、当該ノズル部12を下降させて、ノズルチップ30の先端を吸引元容器100の液面付近まで下降させる。
【0055】
ノズルチップ30先端が液面付近に位置すれば、続いて、制御部24は、分注ポンプ16を駆動して、ノズルチップ30による液体吸引を開始させる(S16)。この液体吸引は、吸引量がステップS10で算出した目標液体吸引量Vsに達するまで行う。液体吸引が完了すれば、続いて、制御部24は、移動機構20を駆動して、ノズル部12を上昇させ、ノズルチップ30の先端を液面から離す(S18)。
【0056】
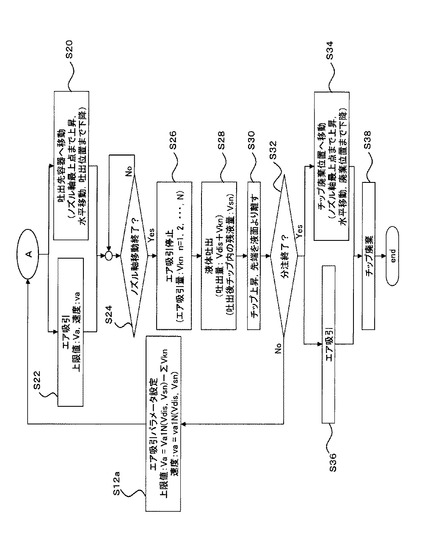
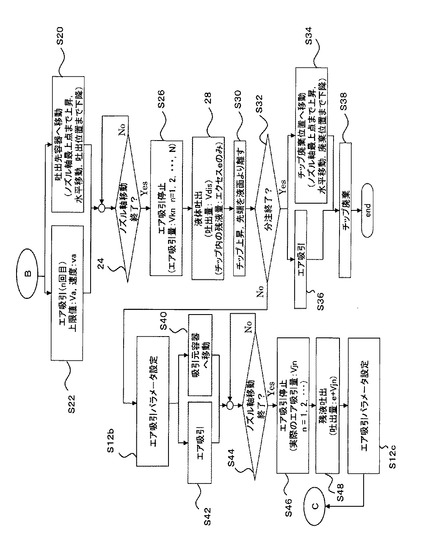
そして、その後は、ノズル部12を、吐出先容器102へと移動させる(S20)。すなわち、ノズル部12をノズル軸最上点まで上昇させた後、吐出先容器102の真上位置に水平移動させ、最後に、吐出高さまでノズル部12を下降させる。
【0057】
また、このノズル部12の移動と並行して、制御部24は、分注ポンプ16を駆動させて、エア吸引を実行させる(S22)。すなわち、分注ポンプ16は、ステップS12で算出されたエア吸引速度vaでノズルチップ内のエアを吸引する。既述したとおり、このエア吸引速度は、ノズルチップ内の液体蒸発に伴う内圧上昇を相殺し得る速度である。したがって、このエア吸引を行うことにより、ノズルチップ30の内圧上昇を防止でき、結果として、内圧上昇に伴う液垂れを防止することができる。また、このエア吸引速度vaは、必要以上にエア吸引しないように極低速に設定されているため、エアギャップの発生も防止または低減される。
【0058】
ここで、こうしたエア吸引は、何らかのエラーにより、ノズル部12の移動が一時的に停止した場合に特に効果を発揮する。すなわち、通常、ノズル部12を移動させている途中に、何らかのエラーが発生した場合、制御部24は、出力部28を介して提示されたメッセージに従い、ユーザが当該エラーに対して適切に対応するまで、ノズル部12の移動を一時停止させる。この一時停止時間は、数分〜数十分に及ぶ場合もある。このような長時間の停止が発生すると、ノズルチップ内の液体蒸発も多くなり、液垂れが発生する可能性が高くなる。しかし、本実施形態のように、液体の蒸発を考慮して、エア吸引を行うことにより、長時間、ノズル部12の移動途中で停止したとしても、液垂れ等を効果的に防止することができる。
【0059】
ノズル部12が、吐出先容器102に到達すれば(S24でYes)、制御部24は、分注ポンプ16の駆動を停止して、エア吸引動作を終了させる(S26)。なお、図8のフローチャートでは記載を省略しているが、ノズル部12の吐出先容器102への到達に先立って、エア吸引量Vkn(nは吐出回数を意味する。1対1式分注の場合は、常にn=1)が、予め規定された上限値Vaに到達した場合(Vkn>Vaの場合)も、エア吸引を停止する。これは、上限値Vaに達した場合には、ノズルチップ内の液面付近が飽和状態に近づき、さらなる、液体蒸発は発生しないと考えられるからである。そして、このように上限値Vaに達した時点でエア吸引を停止することにより、過度なエア吸引によるエアギャップの発生を効果的に防止することができる。
【0060】
次に、制御部24は、分注ポンプ16を駆動して、ノズルチップ内に保持された液体を、吐出先容器102に吐出させる(S28)。ここで、この液体吐出量(シリンジポンプのプランジャ42の移動量)を、ユーザにより指定された目標液体吐出量Vdisだけとするか、当該目標液体吐出量Vdisに現時点までのエア吸引量Vknを加算した値とするかは、分注ポンプ16の特性などに応じて、適宜、最適なほうを選択すればよい。
【0061】
指定量の液体が吐出できれば、移動機構20を駆動して、ノズル部12を上昇させ、ノズルチップ30を吐出先容器102の液面から離す(S30)。そして、これにより、一つの吐出処理が1回完了したことになる。
【0062】
吐出処理が完了すれば、制御部24は、指定の分注作業が終了したか否かを判断する(S32)。一つの吐出先容器102へ1回吐出してから、ノズルチップ30を廃棄・交換する1対1式分注の場合、このステップS32での判断は、常にYesとなる。したがって、液体吐出が1回完了すれば、必ず、ステップS34,S36へと移行する。
【0063】
吐出処理が完了すれば、制御部24は、移動機構20を駆動してノズル部12をチップ廃棄位置へと移動させる(S34)。より具体的には、ノズル部12を、ノズル軸最上点まで上昇、チップ廃棄位置の真上まで水平移動させた後、チップ廃棄位置まで下降させる。このチップ廃棄位置までの移動過程でも、ノズルチップ内に残存している液体が液垂れする恐れがある。そこで、本実施形態では、このチップ廃棄位置までの移動過程においても、エア吸引動作を実行する(S36)。ただし、液体吐出後、ノズルチップ内に残存している液体量は、比較的少量(理論上は、エクセス量eのみ)であることが多く、蒸発量も非常に小さい。そのため、場合によっては、このチップ廃棄位置までの移動時には、このエア吸引動作(S36)を省略してもよい。チップ廃棄位置まで到達すれば、チップ装着部32からノズルチップ30を離脱させ、廃棄する(S38)。そして、以上で、1対1式分注の処理が終了となる。
【0064】
次に、吸引元容器100から、目標液体吐出量×N相当の量の液体を1回で吸引し、当該液体をN個の吐出先容器102へ順次吐出してから、ノズルチップ30を廃棄・交換する1対N式分注の流れについて、同じ図7、図8を参照して説明する。
【0065】
1対N式分注の場合であっても、その大まかな流れは、1対1式分注の場合とほぼ同じである。ただし、1対N式分注の場合、指定回数Nの吐出処理が完了するまで、ステップS20〜S32を繰り返す点で、1対1式分注の場合と若干異なる。
【0066】
すなわち、ステップS30で液体吐出処理が完了すれば、制御部24は、指定の分注作業が終了したか否かを判断する(S32)。このとき、これまでの吐出回数nが、指定の吐出回数指令値Nに到達していない場合には、ステップS12aに移行する。ステップS12aでは、エア吸引パラメータを再設定する。
【0067】
すなわち、液体吐出の完了直後では、ノズルチップ30の内壁に残った液体が、瞬間的に蒸発することが予想される。また、液体吐出後の液面付近は、飽和状態に近づいていた吐出前の液面とは離れており、非飽和状態であることが多い。したがって、液体吸引後、徐々に低下していた蒸発速度が、液体吐出後、大幅に増加することも考えられる。
【0068】
そこで、液体吐出を複数回繰り返す1対N式分注の場合は、1回液体吐出を行うたびに、当該液体吐出後にノズルチップ内の残存液体量等に基づいて、エア吸引パラメータを再設定するようにしている。
【0069】
この再設定方法は、種々考えられる。最も単純な方法は、吐出完了時点におけるノズルチップ内の液体残存量Vsnを、目標液体吸引量Vsと仮定(Vs=Vsn)したうえで、ステップS12と同様の手順でエア量上限値Va=Va1(Vsn)、および、エア吸引速度va=va1(Vsn)を算出することである。ただし、吸引直後(S18時点)における液体残量が100μLの場合と、1回目の液体吐出後(S30)における液体残量が100μLの場合と、では同じ液体残存量であっても、それぞれ液体の蒸発速度は微妙に異なることが推測できる。例えば、液体吐出後は、ノズルチップ30の内壁に液体が付着残存するため、吸引直後に100μLの場合よりも、液体吐出後に100μL残存している場合のほうが、液体とエアとの接触面積が大きくなり勝ちであり、蒸発速度も一時的に大きくなるかもしれない。また、同じ液体吐出後であっても、1回目よりも2回目、2回目よりも3回目のほうが、ノズルチップ内にある蒸気量が多くなりがちであり、蒸発速度が遅くなるかもしれない。このような、分注の進行状況に応じて蒸発速度等の違いが実験等により、ある程度把握できる場合には、当該進行状況に応じて、エア吸引速度等を可変させてもよい。本実施形態では、吐出量Vdisおよび吐出直後の残液量Vsnに基づいてエア吸引速度vaを決定している。また、吐出量Vdis、吐出直後の残液量Vsn、および、それまでに吸引した総エア吸引量ΣVknに基づいて、エア量上限値Vaを決定している。
【0070】
エア吸引パラメータが再設定できれば、再び、ステップS20〜S32を実行する。このとき、ステップS22のエア吸引は、再設定されたエア吸引パラメータを用いて行う。そして、最終的に、指定回数N分の吐出処理が完了すれば(S32でYes)、制御部24は、エア吸引をしつつ、ノズル部12をチップ廃棄位置へ移動させ(S34、S36)、ノズルチップ30を廃棄する。そして、以上で、1対N式分注の処理が終了となる。
【0071】
次に、液体を1回ずつ吸引・吐出する処理をN回、同じノズルチップ30で繰り返す再吸引式分注の処理の流れについて図9、図10を参照して説明する。
【0072】
再吸引式分注の場合も、最初の液体吐出が完了するまでの流れ(S10〜S30)は、上述の1対N式分注とほぼ同じである。一方で、1回目の液体吐出が完了した後、分注終了か否かの判断(S32)が、Noとなった場合には、1対N式分注とは若干異なる処理が行われる。
【0073】
すなわち、分注作業が終了していない場合、制御部24は、エア吸引パラメータを再設定する(S12b)。この再設定の手法も種々考えられるが、本実施形態では、吐出量Vdisおよび吐出直後の残液量Vsn(理論上はエクセス量eのみ)に基づいてエア吸引速度vaを決定している。また、吐出量Vdis、吐出直後の残液量Vsn(理論上はエクセス量eのみ)、および、それまでに吸引した総エア吸引量(ΣVkn+ΣVjn)に基づいて、エア量上限値Vaを決定している。
【0074】
そして、再設定により得られた設定値に基づいて、エア吸引を実行しつつ、ノズルチップ30先端が吸引元容器100の液面近傍に位置するようにノズル部12を移動させる(S40〜S44)。ノズル部12の移動が完了(S44でYes)すれば、エア吸引を終了し(S46)、吸引元容器100に、ノズルチップ30に残存している液体を吐出する(S48)。その後、次回の液体吸引・吐出に利用するエア吸引設定パラメータを再設定する(S12c)。エア吸引設定パラメータが再設定できれば、再び、ステップS16〜S32を繰り返す。そして、最終的に、ユーザに指定された回数であるN回の液体吸引・吐出が終了すれば、エア吸引を行いつつ、ノズル部12をチップ廃棄位置へ移動させ、ノズルチップ30を廃棄する(S34〜S38)。そして、これにより、再吸引式分注の処理が終了となる。
【0075】
以上の説明から明らかなとおり、本実施形態によれば、液体吸引後は、ノズルチップ内の液体蒸発に伴う内圧上昇を相殺し得るエア吸引パラメータを予め決めておき、当該エア吸引パラメータに従って、ノズルチップ内のエア吸引を行っている。これにより、高精度な圧力センサなどを設けなくても、液垂れやエアギャップの発生を効果的に防止または低減できる。また、上述の説明から明らかなとおり、本実施形態では、処理の進行状況、別の見方をすれば、液体の吸引・吐出に伴うノズルチップ内の残存液量の変化に応じて、適宜、エア吸引パラメータの値を再設定している。これにより、より的確にノズルチップ内の内圧上昇を防止でき、ひいては、液垂れやエアギャップの発生をより効果的に防止または低減できる。
【符号の説明】
【0076】
10 分注装置、12 ノズル部、14 配管系、16 分注ポンプ、18 ポンプ駆動部、20 移動機構、22 圧力センサ、24 制御部、25 記憶部、26 入力部、28 出力部、30 ノズルチップ、32 チップ装着部、34 配管、40 シリンダ、42 プランジャ、50 ラック、100 吸引元容器、102 吐出先容器。
【技術分野】
【0001】
本発明は、ノズルを含む配管系の内圧をポンプで可変することで、当該ノズルで液体を吸引および吐出する分注装置に関する。
【背景技術】
【0002】
従来から、液体を吸引元容器から吸引し、吐出先容器へ吐出する分注装置が広く知られている。かかる分注装置においては、ノズルで液体を吸引してから吐出するまでの間に、液垂れや、エアギャップ、ひいては、当該エアギャップを介して液体がノズル先端に溜まる液溜まり等を確実に防止することが望まれている。
【0003】
ここで、液垂れ発生の原因の一つとして、ノズル内で、吸引された液体が蒸発(気化)することが挙げられる。すなわち、吸引元容器から吐出先容器にノズルが移動する間、換言すれば、ノズル先端が液面から離れた状態(空中にある状態)になっているとき、ノズル内の液体が蒸発することにより配管系の内圧が上昇する。そして、この上昇に伴い、当該配管系内圧があるピーク圧を超えるとノズルの先端開口より液体が押し出されて、液垂れが発生する場合がある。この液垂れが生じると、装置が汚れたり、液体が無駄になったり、さらには垂れ落ちた液滴が他の容器に混入してコンタミネーションを起こしたりするので、液垂れを防止する必要がある。
【0004】
このような液垂れの発生を防止するために、液体を吸引したノズルを吐出先の容器へ移動する途中で分注ポンプに一定量の吸引(液垂れ防止吸引)を行わせることが提案されている。しかしながら、液垂れ防止吸引時の吸引量が多いと、ノズルの先端開口から空気が流入してノズル先端にエアギャップを作るおそれがある。エアギャップができた場合、時間が経過するとエアギャップを介してノズルの先端開口に液溜まりが生じるので、液体の吐出動作を行ったときに泡を作ったり、液垂れが発生したときに液滴ではなく気泡がノズルの先端開口部から飛び出し、この気泡が弾けて試料が飛散してコンタミネーションを生じたりする等の不都合が生じる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2003−194835号公報
【特許文献2】特許2005−321342号公報
【特許文献3】特許2005−300236号公報
【特許文献4】特許第2939180号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
そこで、特許文献1〜3などには、吸引後の圧力を監視し、圧力上昇を相殺するようにポンプでエア吸引する技術が開示されている。かかる技術によれば、上述した液垂れ等の問題を多少は低減できる。しかし、リファレンスとして取得する吸引直後の圧力が、機械的振動や配管系の漏れなどで正しい値を示さない場合も多い。また、液垂れが発生するピーク圧は液圧やノズルの状態により必ずしも一定でない。そのため、圧力を監視してエア吸引量を制御する従来の方法では、液垂れやエアギャップ等を効果的に防止することは困難であった。
【0007】
また、特許文献4には、ノズルで液体を吸引した後、微小流量の空気を吸引し続け、チップ内の液体に気泡を連続して発生させることで液垂れを防止する技術が開示されている。しかし、かかる微小気泡は、吐出量の誤差の原因になったりするため、当該技術では、好適な分注処理が出来ない場合があった。
【0008】
そこで、本発明は、液垂れ、エアギャップの発生を効果的に低減でき得る分注装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
液体の吸引および吐出を行う分注装置であって、その内部に液体が保持されるノズルと、前記ノズルを移動させる移動機構と、前記ノズルを含む配管系の内圧を変化させることで、前記ノズルでの液体吸引および吐出を実行させるポンプと、少なくとも、前記ノズルでの液体吸引完了から液体吐出開始までの間にノズル内で生じる液体蒸発に伴う内圧上昇を相殺し得る前記ノズル内のエア吸引速度を含むエア吸引条件をエア吸引設定情報として予め記憶した記憶手段と、前記移動機構およびポンプの駆動を制御する制御手段であって、前記ノズルでの液体吸引完了から液体吐出開始までの間に前記エア吸引設定情報に規定されたエア吸引条件でのエア吸引を前記ポンプに指示する制御手段と、を備えることを特徴とする。
【0010】
好適な態様では、前記エア吸引条件は、さらに、吸引するエア量の上限値も含み、前記制御手段は、前記エア吸引により吸引するエア吸引量が、前記上限値に達した場合には前記液体吐出開始前であっても、前記エア吸引を停止させる。
【0011】
他の好適な態様では、前記エア吸引設定情報は、前記ノズルでの液体吸引条件ごとに異なる複数のエア吸引条件を記憶しており、前記制御部は、実際に行う液体吸引の条件に基づいて、当該実際に行う液体吸引に適したエア吸引条件を選択する。この場合、前記液体吸引条件は、液体吸引量、液体種類、ノズル種類、温度、湿度の少なくとも一つを含む、ことが望ましい。
【0012】
他の好適な態様では、前記エア吸引速度は、前記液体吸引完了からの経過時間に応じて変化する可変値である。他の好適な態様では、前記制御部は、分注処理の進行に伴い前記ノズル内の液体量が変化した場合には、前記エア吸引条件を再設定する。
【発明の効果】
【0013】
本発明によれば、液体蒸発に伴う内圧上昇を相殺し得るエア吸引速度でエア吸引を行うことができるため、液垂れ、エアギャップの発生を効果的に低減できる。
【図面の簡単な説明】
【0014】
【図1】本発明の実施形態である分注装置の概略構成図でる。
【図2】配管系周辺の概略構成図である。
【図3】配管系内圧の変化の一例を示すグラフである。
【図4】液体吸引量と限界経過時間との関係を示すグラフである。
【図5】エア吸引設定情報の一例を示す図である。
【図6】エア吸引速度の一例を示すグラフである。
【図7】分注処理の流れを示すフローチャートである。
【図8】分注処理の流れを示すフローチャートである。
【図9】他の分注処理の流れを示すフローチャートである。
【図10】他の分注処理の流れを示すフローチャートである。
【発明を実施するための形態】
【0015】
以下、本発明の実施形態について図面を参照して説明する。図1は、本発明の実施形態である分注装置10の概略構成図である。また、図2は、分注装置10のうちノズル部12を含む配管系14および分注ポンプ16周辺のみを抽出した概略構成図である。
【0016】
この分注装置10は、吸引元容器100に収容された液体、例えば、血液などの体液や薬液などをノズルチップ30で吸引し、1以上の吐出先容器102に吐出し、分注する装置である。この分注装置10は、図1から明らかなとおり、ノズル部12および配管34を含む配管系14、分注ポンプ16、移動機構20、入力部26、出力部28、および、制御部24などを備えている。
【0017】
ノズル部12は、実際に液体を吸引吐出するノズルチップ30と当該ノズルチップ30が装着される装着部32などを含んでいる。ここで、本実施形態では、ノズルチップ30として、使用のたびに廃棄・交換が可能なディスポーザブル方式のノズルチップ30を用いている。そのため、分注装置10の内部または近傍には、多数の未使用のノズルチップ30がラック50などに保持された状態で保管されている。また、分注装置10の内部または近傍には、使用済みのノズルチップ30を貯蔵するダスト空間(図示せず)が形成されており、当該ダスト空間近傍には、ノズルチップ30の廃棄作業を行うためのチップ廃棄位置が設定されている。
【0018】
なお、当然ながら、ディスポーザブル方式のノズルチップ30に代えて、洗浄を介在させながら繰り返し使用するノズルチップ30を用いてもよい。そして、いずれの態様のノズルチップ30を用いるにしても、要求される液体の吸引量および吐出量(目標液体吸引量および目標液体吐出量)に応じて、適宜、異なる形状のノズルチップ30が選択できることが望ましい。すなわち、比較的、大量の液体の吸引・吐出が必要な場合には大サイズのノズルチップ30を、比較的、少量の液体の吸引・吐出が必要な場合には小サイズのノズルチップ30を、用いることができるように構成することが望ましい。
【0019】
ノズルチップ30は、その一端が配管34に連結されたチップ装着部32の他端に嵌合により装着される。そして、このノズルチップ30やチップ装着部32を含むノズル部12は、移動機構20により、三次元的に移動させられる。なお、移動機構20の駆動は、制御部24により制御される。
【0020】
このノズル部12は、配管34を介して分注ポンプ16に連結されている。分注ポンプ16は、ノズル部12および配管34からなる配管系14の内圧を可変するものである。この分注ポンプ16は、適宜、内圧を可変できるのであれば、その種類は特に限定されないが、本実施形態では、シリンダ40とプランジャ42とから構成されシリンジポンプを用いている。この分注ポンプ16の駆動は、ポンプ駆動部18を介して制御部24により制御される。ノズル部12と分注ポンプ16との間には、配管系14の内圧を計測する圧力センサ22が設けられている。この圧力センサ22での検出値は、適宜、制御部24に出力され、各種制御、例えば、液面検出などに利用される。
【0021】
入力部26は、ユーザからの指示等を受けつけるユーザインターフェースの一部で、キーボードやタッチパネルなどを含むことができる。ユーザは、この入力部26を操作して、吸引する液体の種類や、目標液体吸引量、目標液体吐出量、吐出回数などの分注条件等を入力する。入力された分注条件は、制御部24に入力され、制御部24は、当該分注条件に基づいて、各部の駆動を制御する。出力部28は、各種情報をユーザに提示するユーザインターフェースの一部で、ディスプレイやスピーカ、LEDランプなどを含むことができる。
【0022】
制御部24は、分注装置10全体の駆動を制御するもので、より具体的には、入力部26を介して入力された指示に基づいて、分注ポンプ16や移動機構20の駆動を制御し、分注処理を実行させる。
【0023】
また、この制御部24は、メモリやハードディスクなどからなる記憶部25を有しており、当該記憶部25には、後述するエア吸引設定情報が記憶されている。エア吸引設定情報は、ノズルチップ30先端からの液垂れやエアギャップ等の発生を防止または低減するために、分注ポンプ16が行う極低速でのエア吸引の条件(エア吸引パラメータ)を含む情報であるが、これについては後に詳説する。
【0024】
次に、この分注装置10で行われる分注処理の大まかな流れを説明する。ユーザから分注処理開始が指示された場合、制御部24は、移動機構20を駆動して、新たなノズルチップ30が装着されたノズル部12を吸引元容器100へと移動させる。そして、その状態で、分注ポンプ16を駆動し、ノズルチップ内に、目標液体吸引量の液体を吸引させる。目標液体吸引量が吸引できた場合には、続いて、移動機構20を駆動して、ノズルチップ30を吐出先容器102へと移動させる。そして、分注ポンプ16を駆動して、目標液体吐出量の液体をノズルチップ30から吐出先容器102へと吐出させる。
【0025】
ここで、従来、このノズルチップ30による液体吸引完了後、吐出先容器102へノズル部12を移動させる途中で、ノズルチップ30の先端から液体が押し出される液垂れなどが発生することがあった。かかる液垂れが発生すると、装置が汚れたり、液体が無駄になったり、さらには垂れ落ちた液滴が他の容器に混入してコンタミネーションを起こしたりするという問題があった。
【0026】
かかる液垂れは、ノズルチップ内で吸引された液体が蒸発するなどの理由により発生すると考えられる。すなわち、ノズルチップ30での液体吸引が完了すると、その後は、ノズルチップ内の液面から蒸発が起こる。そして、ノズルチップ30の内部に蒸気が拡散することにより、配管系内圧が上昇する。この配管系内圧によりノズルチップ内の液体が外側に押される力が、ノズルチップ30先端の表面張力の臨界値を超えると、液垂れが発生する。
【0027】
図3は、この液垂れ発生前後における配管系内圧の変化の一例を示すグラフである。横軸は、液体吸引完了してノズルチップ30の先端が液面から離れてからの経過時間を、縦軸は、時刻0での配管系内圧を基準にした圧力増加量を示している。この図3に図示するとおり、時刻0でノズルチップ30が液面から離れた後は、ノズルチップ内に吸引された液体が微量ながら蒸発(気化)していくため、徐々に配管系内圧が上昇する。この内圧上昇は、図3において破線で示すように、指数関数的に増加する。ただし、通常は、その上昇の過程において、配管系内圧が、液垂れが発生するピーク圧Pmaxに到達し、液垂れが発生する。図示例では、時刻t1において、配管系内圧がピーク圧Pmaxに到達する。この場合、当該内圧により液体が押し出されて、ノズルチップ30の先端から液体が垂れる液垂れが発生する。液垂れ発生後は、図3に図示するとおり、配管系内圧は、急激に低下する。なお、既述したとおり、通常、配管系内圧は、指数関数的に増加、換言すれば、液体吸引してからの経過時間が経つにつれ、内圧上昇率は徐々に低下する。これは、時間が経過するにつれ、ノズルチップ内の液面付近が、飽和状態に近づき、蒸発速度が遅くなるためと推測される。
【0028】
本実施形態では、こうした液垂れを防止または低減するために、液体吸引完了から液体吐出までの間、上述した液体蒸発に伴う内圧上昇を相殺するべく、ノズルチップ内の気体を分注ポンプ16で吸引するエア吸引を行うようにしている。このエア吸引は、ノズルチップ30の先端にエアギャップが生じないように、極低速で行う。かかるエア吸引動作を実行することにより、液垂れを防止または低減することができる。ただし、本発明は、従来技術と異なり、このエア吸引を予め記憶部25に記憶されたエア吸引設定情報に基づいて行うようにしている。
【0029】
すなわち、従来においても、液体吸引後の配管系内圧を圧力センサで監視し、当該内圧上昇を相殺するように分注ポンプ16でエア吸引する技術が提案されている。しかし、かかる手法で液垂れを防止するためには、高精度で応答性に優れた圧力センサが必要となり、コスト増加の原因となる。また、検出される液体吸引完了直後の圧力値は、機械的振動や配管系14の漏れなどで正しい値を示さないこともあった。さらに、液垂れが発生するピーク圧が、液性やチップの状態により必ずしも一定していないという問題もあった。そのため、従来の配管系内圧を監視結果に応じてエア吸引する技術では、液垂れを効果的に防止または低減することは出来なかった。
【0030】
一方、本実施形態では、このエア吸引を、予め記憶部25に記憶されたエア吸引設定情報に基づいて行う。エア吸引設定情報は、各種分注条件(ノズルチップ30の形状や液体の種類、目標吸引量など)ごとに予め規定されたエア吸引条件、より具体的には、エア吸引速度va、エア量上限値Vaなどが記録されたもので、事前の実験結果などに基づいて規定される。そして、かかる事前規定されたエア吸引条件に基づいてエア吸引を実行することで、より確実に、液垂れを防止または低減することができる。
【0031】
ここで、このエア吸引設定情報の詳細説明に先立って、液垂れ発生に関与する各種パラメータについて簡単に説明する。まず、液垂れが発生する配管系14の内圧であるピーク圧について検討する。液体吸引直後を基準にとると液垂れが発生するピーク圧Pmaxは、Pmax=2×σ/(d/2)と推測することができる。なお、σは液体の表面張力、dはノズルチップ30の先端内径である。そして、この式から明らかなとおり、ピーク圧は、吸引される液体の種類(表面張力)およびノズルチップ30の種類(先端内径)に依存することが分かる。
【0032】
また、液垂れ発生時点における蒸気量、すなわち、限界蒸気量Eを検討すると、液垂れが発生する直前の圧力から、その時点での蒸発量Eは、E=Pmax/P0×V0と推測できる。ここで、V0はノズルチップ30を含む配管系14のデッドボリューム(液体が存在しない空間体積)であり、P0は大気圧である。ノズルチップ内で発生する蒸気量が、この限界蒸気量Eに到達すると、液垂れが発生することになる。
【0033】
ここで、液体吸引完了後、液垂れが発生(すなわち発生する蒸気量が限界蒸気量Eに到達)するまでの経過時間(以下、「限界経過時間Tmax」と呼ぶ)は、ノズルチップ30周辺での温度や湿度といった環境条件によっても異なるが、ノズルチップ内に吸引された液体吸引量によっても異なっている。
【0034】
図4は、ノズルチップ内に吸引された液体吸引量による限界経過時間Tmaxの違いを示すグラフである。より具体的には、この図4は、温度・湿度を一定に保ち、同一形状のノズルチップ30を用いて、蒸留水を吸引した際の限界経過時間Tmaxを、液体吸引量ごとに調べた実験結果を示すグラフである。この図4において、横軸は、液体吸引量を、縦軸は、限界経過時間Tmaxを示している。なお、液体吸引量は、ノズルチップ30の容量に対するパーセンテージで示している。例えば、当該実験で用いたノズルチップ30の規定容量が1000μLである場合において、200μLの液体を吸引した場合の液体吸引量は「20%」として示している。
【0035】
この図4から明らかなとおり、液体吸引量が、ノズルチップ容量の20%未満の場合は、液垂れを発生させることなく、90秒以上、液体をノズルチップ内で保持することが出来ている。一方、液体吸引量が、ノズルチップ容量の20%以上になると、限界経過時間Tmaxは、低下し、比較的、短時間で液垂れが発生することがわかる。しかしながら、液体吸引量が、ノズルチップ容量の70%になると、限界経過時間Tmaxは、若干長くなる。そして、液体吸引量がノズルチップ容量の80%以上になると限界経過時間Tmaxは大幅に増加し、液垂れを発生させることなく、180秒以上、液体をノズルチップ内で保持することが出来るようになる。
【0036】
つまり、少量および多量の液体を吸引する場合、限界経過時間Tmaxは長くなりがちであるが、中間量の液体を吸引する場合、限界経過時間Tmaxは短くなりがちになる。かかる傾向がみられる理由としては、次のようなことが考えられる。液体吸引量が大きい場合、ノズルチップ内部のエア体積(デッドボリューム)は小さくなる。そのため、比較的早い段階で飽和状態に近づき、さらなる蒸発が生じにくくなる。その結果、発生する蒸発量も少なくなり、液垂れも起こりにくくなると考えられる。また、液体吸引量が小さい場合、ノズルチップ内部のエア体積(デッドボリューム)は大きくなるが、蒸発する液面面積が小さくなる。そのため、蒸発速度は遅くなり、液垂れも起こりにくくなると考えられる。
【0037】
エア吸引設定情報は、上述したような液垂れ発生に関与する各種条件を考慮し、予め行われた各種実験結果に基づいて規定される。図5は、本実施形態で用いるエア吸引設定情報の一例を示す図である。なお、図5においては、各項目の値を「***」と図示しているが、実際には、具体的数値が記憶さている。
【0038】
この図5に図示するとおり、エア吸引設定情報では、各液体吸引量(すなわち目標液体吸引量)ごとに、エア吸引時条件(具体的にはエア吸引速度vaおよびエア量上限値Va)を規定している。また、このエア吸引条件は、ノズルチップ30の種類(形状)ごとに用意されている。
【0039】
かかるエア吸引条件は、事前に行われる実験などに基づいて規定される。例えば、各液体吸引量ごとに、液体吸引完了から5秒経過後における配管系内圧の上昇量を測定する。この圧力上昇量から、液体の蒸発速度を推定する。そして、この蒸発を相殺でき得るエア吸引速度vaを求める。そして、得られたエア吸引速度vaを、図5に示す表のような形式にまとめ、エア吸引設定情報として記憶部25に記憶しておく。
【0040】
また、図3を用いて説明したように、ノズルチップ内の液面付近が飽和状態になれば、液体の蒸発が殆ど生じなくなり、内圧も上昇しなくなる。かかる飽和状態においてエア吸引を続行した場合には、エアギャップが生じる恐れがある。そこで、本実施形態では、エア吸引量Vaの上限値も設定し、エア吸引量が当該上限値Vaに達すればエア吸引を停止する。
【0041】
ここで、このエア量上限値Vaは、予め行われる実験などにより算出され、記憶される。すなわち、エア量上限値Vaを規定する際には、図3のグラフのような液体吸引後における内圧の変化を、予め実験等により求めておく。そして、この内圧の変化から、ノズルチップ内の液面付近が飽和状態になるとき、すなわち、内圧の変化が殆ど無くなるときの内圧を推定する。そして、この飽和時点における内圧に基づいて、飽和時点における蒸気量を算出し、この算出された蒸気量をエア量上限値Vaとして規定すればよい。
【0042】
なお、この図5で例示したエア吸引設定情報は、一例であり、当然、他の形式のエア吸引設定情報を用いてもよい。例えば、本例では、5秒経過後における内圧上昇量および蒸発量も記憶しているが、これらの数値は、実際のエア吸引動作制御に利用されないため、当然、省略されてもよい。また、少なくともエア吸引速度vaが記憶されているのであれば、エア量上限値Vaも省略されてもよい。
【0043】
また、本例では、液体吸引量およびノズルチップ30の種類ごとに、エア吸引速度va等を規定しているが、さらに、環境条件(温度や湿度)ごとにもエア吸引条件を作成してもよい。逆に、さまざまな分注条件に対応したエア吸引条件を規定するのではなく、特定の分注条件に対応したエア吸引条件を一つだけ規定しておき、適宜、実際に分注する際の分注条件に対応した補正計数を当該一つのエア吸引条件に乗算して、エア吸引パラメータを求めるようにしてもよい。例えば、蒸留水を1000μLのノズルチップ30で100μL吸引した際のエア吸引速度vaおよびエア量上限値Vaだけをエア吸引条件として記憶部25に記憶しておく。そして、実際に蒸留水ではなく、血清を1000μLのノズルチップ30で100μL吸引する場合には、記憶されているエア吸引速度vaおよびエア量上限値Vaに規定の補正計数を乗算し、血清に適したエア吸引速度vaおよびエア量上限値Vaに補正して用いるようにしてもよい。また、その他の条件、液体吸引量やノズルチップ30の種類、温度、湿度などについても、同様に、適宜、補正計数を乗算するなどして補正するようにしてもよい。
【0044】
また、本例では、マトリックス形式のエア吸引設定情報を例示しているが、エア吸引速度vaやエア量上限値Vaを、ノズルチップ30の形状や、液体吸引量、温度、湿度、液体種類などの関数として表現したものをエア吸引設定情報として記憶するようにしてもよい。
【0045】
また、これまでの説明では、分注条件(ノズルチップ30種類、液体吸引量、温度、湿度、液体種類)が一定の場合、エア吸引速度も一定とする場合のみを例示したが、分注条件一定でも、エア吸引速度vaを可変させるようにしてもよい。例えば、ノズルチップ30での液体吸引完了してからの経過時間に応じて、エア吸引速度vaを可変させてもよい。
【0046】
図6は、この場合において採用可能なエア吸引速度vaの一例を示す図である。図6において、横軸は、液体吸引完了してからの経過時間を、縦軸は、エア吸引量を示している。図6における太実線は、図5で例示したエア吸引設定情報に従った場合のエア吸引量の変化を示している。
【0047】
この太実線で示すようにエア吸引速度を一定にしてもよいが、図6において、破線で示すように、間欠的にエア吸引を行う(換言すれば、エア吸引速度vaをゼロと一定値との間で繰り返し変化させる)ようにしてもよい。このように間欠的にエア吸引を行うことにより、エアギャップの形成を効果的に防止または低減できる。
【0048】
また、別の態様として、図6において細実線で図示するように、エア吸引速度vaを複数段階(図示例では二段階)に変化させてもよい。このように複数段階に変化させる場合には、経過時間が長くなるほど、エア吸引速度vaを小さくすることが望ましい。これは、経過時間が長くなるほど、ノズルチップ内の液面周辺が飽和状態に近づき、蒸発速度が遅く、ひいては、圧力上昇速度が遅くなるためである。
【0049】
また、細実線のように段階的に変化させるのではなく、図6において、一点鎖線で図示するように、エア吸引速度vaを連続的に変化させてもよい。このように連続的に変化させる場合には、エア吸引量の波形が、図3において破線で図示した配管系内圧の上昇波形に対応するように、エア吸引速度を設定することが望ましい。
【0050】
いずれにしても、上述したように、予め、実験等により液垂れを防止でき得るエア吸引速度va等を求めて記憶しておき、実際の分注処理時には、当該記憶されたエア吸引速度vaでエア吸引を行うことにより、液垂れやエアギャップの発生率を大幅に低減できる。
【0051】
次に、この分注装置10での分注処理の流れについて詳説する。当該分注装置10で行われる分注処理の態様として、種々考えられるが、ここでは、次の三つの態様について説明する。一つは、吸引元容器100から、目標液体吐出量の液体を1回吸引し、当該液体を吐出先容器102へ1回吐出してから、ノズルチップ30を廃棄・交換する1対1式分注である。もう一つは、吸引元容器100から、目標液体吐出量×N相当の量の液体を1回で吸引し、当該液体をN個の吐出先容器102へ順次吐出してから、ノズルチップ30を廃棄・交換する1対N式分注である。最後の一つは、吸引元容器100から、目標液体吐出量の液体を1回吸引し、当該液体を吐出先容器102へ1回吐出する動作を複数回、同じノズルチップ30で繰り返してから、ノズルチップ30を廃棄・交換する再吸引式分注である。以下、各分注処理の流れについて図面を参照して詳説する。
【0052】
図7、図8は、1対1式分注の処理の流れを示すフローチャートである。1対1式分注を行う場合、制御部24は、まず、入力部26を介して入力された各種分注条件に基づいて、目標液体吸引量Vsを設定する(S10)。この目標吸引量Vsは、目標液体吐出量Vdisにエクセス量eを加算した値である。なお、図7、図8において、「N」は吐出回数指令値を意味しており、1対1式分注の場合には、常にN=1である。
【0053】
続いて、制御部24は、入力部26を介して入力された各種分注条件(目標吸引量、ノズルチップ30の種類、液体種類、温度、湿度など)、および、記憶部25に記憶されているエア吸引設定情報に基づいて、エア吸引パラメータを設定する(S12)。すなわち、制御部24は、入力された分注条件に対応したエア吸引速度va、エア量上限値Vaを決定し、メモリに一時記憶しておく。
【0054】
続いて、制御部24は、移動機構20を駆動させて、ノズル部12を吸引元容器100へと移動させる(S14)。より具体的には、まず、ノズル部12を水平移動させて吸引元容器100の真上に位置させる。続いて、当該ノズル部12を下降させて、ノズルチップ30の先端を吸引元容器100の液面付近まで下降させる。
【0055】
ノズルチップ30先端が液面付近に位置すれば、続いて、制御部24は、分注ポンプ16を駆動して、ノズルチップ30による液体吸引を開始させる(S16)。この液体吸引は、吸引量がステップS10で算出した目標液体吸引量Vsに達するまで行う。液体吸引が完了すれば、続いて、制御部24は、移動機構20を駆動して、ノズル部12を上昇させ、ノズルチップ30の先端を液面から離す(S18)。
【0056】
そして、その後は、ノズル部12を、吐出先容器102へと移動させる(S20)。すなわち、ノズル部12をノズル軸最上点まで上昇させた後、吐出先容器102の真上位置に水平移動させ、最後に、吐出高さまでノズル部12を下降させる。
【0057】
また、このノズル部12の移動と並行して、制御部24は、分注ポンプ16を駆動させて、エア吸引を実行させる(S22)。すなわち、分注ポンプ16は、ステップS12で算出されたエア吸引速度vaでノズルチップ内のエアを吸引する。既述したとおり、このエア吸引速度は、ノズルチップ内の液体蒸発に伴う内圧上昇を相殺し得る速度である。したがって、このエア吸引を行うことにより、ノズルチップ30の内圧上昇を防止でき、結果として、内圧上昇に伴う液垂れを防止することができる。また、このエア吸引速度vaは、必要以上にエア吸引しないように極低速に設定されているため、エアギャップの発生も防止または低減される。
【0058】
ここで、こうしたエア吸引は、何らかのエラーにより、ノズル部12の移動が一時的に停止した場合に特に効果を発揮する。すなわち、通常、ノズル部12を移動させている途中に、何らかのエラーが発生した場合、制御部24は、出力部28を介して提示されたメッセージに従い、ユーザが当該エラーに対して適切に対応するまで、ノズル部12の移動を一時停止させる。この一時停止時間は、数分〜数十分に及ぶ場合もある。このような長時間の停止が発生すると、ノズルチップ内の液体蒸発も多くなり、液垂れが発生する可能性が高くなる。しかし、本実施形態のように、液体の蒸発を考慮して、エア吸引を行うことにより、長時間、ノズル部12の移動途中で停止したとしても、液垂れ等を効果的に防止することができる。
【0059】
ノズル部12が、吐出先容器102に到達すれば(S24でYes)、制御部24は、分注ポンプ16の駆動を停止して、エア吸引動作を終了させる(S26)。なお、図8のフローチャートでは記載を省略しているが、ノズル部12の吐出先容器102への到達に先立って、エア吸引量Vkn(nは吐出回数を意味する。1対1式分注の場合は、常にn=1)が、予め規定された上限値Vaに到達した場合(Vkn>Vaの場合)も、エア吸引を停止する。これは、上限値Vaに達した場合には、ノズルチップ内の液面付近が飽和状態に近づき、さらなる、液体蒸発は発生しないと考えられるからである。そして、このように上限値Vaに達した時点でエア吸引を停止することにより、過度なエア吸引によるエアギャップの発生を効果的に防止することができる。
【0060】
次に、制御部24は、分注ポンプ16を駆動して、ノズルチップ内に保持された液体を、吐出先容器102に吐出させる(S28)。ここで、この液体吐出量(シリンジポンプのプランジャ42の移動量)を、ユーザにより指定された目標液体吐出量Vdisだけとするか、当該目標液体吐出量Vdisに現時点までのエア吸引量Vknを加算した値とするかは、分注ポンプ16の特性などに応じて、適宜、最適なほうを選択すればよい。
【0061】
指定量の液体が吐出できれば、移動機構20を駆動して、ノズル部12を上昇させ、ノズルチップ30を吐出先容器102の液面から離す(S30)。そして、これにより、一つの吐出処理が1回完了したことになる。
【0062】
吐出処理が完了すれば、制御部24は、指定の分注作業が終了したか否かを判断する(S32)。一つの吐出先容器102へ1回吐出してから、ノズルチップ30を廃棄・交換する1対1式分注の場合、このステップS32での判断は、常にYesとなる。したがって、液体吐出が1回完了すれば、必ず、ステップS34,S36へと移行する。
【0063】
吐出処理が完了すれば、制御部24は、移動機構20を駆動してノズル部12をチップ廃棄位置へと移動させる(S34)。より具体的には、ノズル部12を、ノズル軸最上点まで上昇、チップ廃棄位置の真上まで水平移動させた後、チップ廃棄位置まで下降させる。このチップ廃棄位置までの移動過程でも、ノズルチップ内に残存している液体が液垂れする恐れがある。そこで、本実施形態では、このチップ廃棄位置までの移動過程においても、エア吸引動作を実行する(S36)。ただし、液体吐出後、ノズルチップ内に残存している液体量は、比較的少量(理論上は、エクセス量eのみ)であることが多く、蒸発量も非常に小さい。そのため、場合によっては、このチップ廃棄位置までの移動時には、このエア吸引動作(S36)を省略してもよい。チップ廃棄位置まで到達すれば、チップ装着部32からノズルチップ30を離脱させ、廃棄する(S38)。そして、以上で、1対1式分注の処理が終了となる。
【0064】
次に、吸引元容器100から、目標液体吐出量×N相当の量の液体を1回で吸引し、当該液体をN個の吐出先容器102へ順次吐出してから、ノズルチップ30を廃棄・交換する1対N式分注の流れについて、同じ図7、図8を参照して説明する。
【0065】
1対N式分注の場合であっても、その大まかな流れは、1対1式分注の場合とほぼ同じである。ただし、1対N式分注の場合、指定回数Nの吐出処理が完了するまで、ステップS20〜S32を繰り返す点で、1対1式分注の場合と若干異なる。
【0066】
すなわち、ステップS30で液体吐出処理が完了すれば、制御部24は、指定の分注作業が終了したか否かを判断する(S32)。このとき、これまでの吐出回数nが、指定の吐出回数指令値Nに到達していない場合には、ステップS12aに移行する。ステップS12aでは、エア吸引パラメータを再設定する。
【0067】
すなわち、液体吐出の完了直後では、ノズルチップ30の内壁に残った液体が、瞬間的に蒸発することが予想される。また、液体吐出後の液面付近は、飽和状態に近づいていた吐出前の液面とは離れており、非飽和状態であることが多い。したがって、液体吸引後、徐々に低下していた蒸発速度が、液体吐出後、大幅に増加することも考えられる。
【0068】
そこで、液体吐出を複数回繰り返す1対N式分注の場合は、1回液体吐出を行うたびに、当該液体吐出後にノズルチップ内の残存液体量等に基づいて、エア吸引パラメータを再設定するようにしている。
【0069】
この再設定方法は、種々考えられる。最も単純な方法は、吐出完了時点におけるノズルチップ内の液体残存量Vsnを、目標液体吸引量Vsと仮定(Vs=Vsn)したうえで、ステップS12と同様の手順でエア量上限値Va=Va1(Vsn)、および、エア吸引速度va=va1(Vsn)を算出することである。ただし、吸引直後(S18時点)における液体残量が100μLの場合と、1回目の液体吐出後(S30)における液体残量が100μLの場合と、では同じ液体残存量であっても、それぞれ液体の蒸発速度は微妙に異なることが推測できる。例えば、液体吐出後は、ノズルチップ30の内壁に液体が付着残存するため、吸引直後に100μLの場合よりも、液体吐出後に100μL残存している場合のほうが、液体とエアとの接触面積が大きくなり勝ちであり、蒸発速度も一時的に大きくなるかもしれない。また、同じ液体吐出後であっても、1回目よりも2回目、2回目よりも3回目のほうが、ノズルチップ内にある蒸気量が多くなりがちであり、蒸発速度が遅くなるかもしれない。このような、分注の進行状況に応じて蒸発速度等の違いが実験等により、ある程度把握できる場合には、当該進行状況に応じて、エア吸引速度等を可変させてもよい。本実施形態では、吐出量Vdisおよび吐出直後の残液量Vsnに基づいてエア吸引速度vaを決定している。また、吐出量Vdis、吐出直後の残液量Vsn、および、それまでに吸引した総エア吸引量ΣVknに基づいて、エア量上限値Vaを決定している。
【0070】
エア吸引パラメータが再設定できれば、再び、ステップS20〜S32を実行する。このとき、ステップS22のエア吸引は、再設定されたエア吸引パラメータを用いて行う。そして、最終的に、指定回数N分の吐出処理が完了すれば(S32でYes)、制御部24は、エア吸引をしつつ、ノズル部12をチップ廃棄位置へ移動させ(S34、S36)、ノズルチップ30を廃棄する。そして、以上で、1対N式分注の処理が終了となる。
【0071】
次に、液体を1回ずつ吸引・吐出する処理をN回、同じノズルチップ30で繰り返す再吸引式分注の処理の流れについて図9、図10を参照して説明する。
【0072】
再吸引式分注の場合も、最初の液体吐出が完了するまでの流れ(S10〜S30)は、上述の1対N式分注とほぼ同じである。一方で、1回目の液体吐出が完了した後、分注終了か否かの判断(S32)が、Noとなった場合には、1対N式分注とは若干異なる処理が行われる。
【0073】
すなわち、分注作業が終了していない場合、制御部24は、エア吸引パラメータを再設定する(S12b)。この再設定の手法も種々考えられるが、本実施形態では、吐出量Vdisおよび吐出直後の残液量Vsn(理論上はエクセス量eのみ)に基づいてエア吸引速度vaを決定している。また、吐出量Vdis、吐出直後の残液量Vsn(理論上はエクセス量eのみ)、および、それまでに吸引した総エア吸引量(ΣVkn+ΣVjn)に基づいて、エア量上限値Vaを決定している。
【0074】
そして、再設定により得られた設定値に基づいて、エア吸引を実行しつつ、ノズルチップ30先端が吸引元容器100の液面近傍に位置するようにノズル部12を移動させる(S40〜S44)。ノズル部12の移動が完了(S44でYes)すれば、エア吸引を終了し(S46)、吸引元容器100に、ノズルチップ30に残存している液体を吐出する(S48)。その後、次回の液体吸引・吐出に利用するエア吸引設定パラメータを再設定する(S12c)。エア吸引設定パラメータが再設定できれば、再び、ステップS16〜S32を繰り返す。そして、最終的に、ユーザに指定された回数であるN回の液体吸引・吐出が終了すれば、エア吸引を行いつつ、ノズル部12をチップ廃棄位置へ移動させ、ノズルチップ30を廃棄する(S34〜S38)。そして、これにより、再吸引式分注の処理が終了となる。
【0075】
以上の説明から明らかなとおり、本実施形態によれば、液体吸引後は、ノズルチップ内の液体蒸発に伴う内圧上昇を相殺し得るエア吸引パラメータを予め決めておき、当該エア吸引パラメータに従って、ノズルチップ内のエア吸引を行っている。これにより、高精度な圧力センサなどを設けなくても、液垂れやエアギャップの発生を効果的に防止または低減できる。また、上述の説明から明らかなとおり、本実施形態では、処理の進行状況、別の見方をすれば、液体の吸引・吐出に伴うノズルチップ内の残存液量の変化に応じて、適宜、エア吸引パラメータの値を再設定している。これにより、より的確にノズルチップ内の内圧上昇を防止でき、ひいては、液垂れやエアギャップの発生をより効果的に防止または低減できる。
【符号の説明】
【0076】
10 分注装置、12 ノズル部、14 配管系、16 分注ポンプ、18 ポンプ駆動部、20 移動機構、22 圧力センサ、24 制御部、25 記憶部、26 入力部、28 出力部、30 ノズルチップ、32 チップ装着部、34 配管、40 シリンダ、42 プランジャ、50 ラック、100 吸引元容器、102 吐出先容器。
【特許請求の範囲】
【請求項1】
液体の吸引および吐出を行う分注装置であって、
その内部に液体が保持されるノズルと、
前記ノズルを移動させる移動機構と、
前記ノズルを含む配管系の内圧を変化させることで、前記ノズルでの液体吸引および吐出を実行させるポンプと、
少なくとも、前記ノズルでの液体吸引完了から液体吐出開始までの間にノズル内で生じる液体蒸発に伴う内圧上昇を相殺し得る前記ノズル内のエア吸引速度を含むエア吸引条件をエア吸引設定情報として予め記憶した記憶手段と、
前記移動機構およびポンプの駆動を制御する制御手段であって、前記ノズルでの液体吸引完了から液体吐出開始までの間に前記エア吸引設定情報に規定されたエア吸引条件でのエア吸引を前記ポンプに指示する制御手段と、
を備えることを特徴とする分注装置。
【請求項2】
請求項1に記載の分注装置であって、
前記エア吸引条件は、さらに、吸引するエア量の上限値も含み、
前記制御手段は、前記エア吸引により吸引するエア吸引量が、前記上限値に達した場合には前記液体吐出開始前であっても、前記エア吸引を停止させる、
ことを特徴とする分注装置。
【請求項3】
請求項1または2に記載の分注装置であって、
前記エア吸引設定情報は、前記ノズルでの液体吸引条件ごとに異なる複数のエア吸引条件を記憶しており、
前記制御部は、実際に行う液体吸引の条件に基づいて、当該実際に行う液体吸引に適したエア吸引条件を選択する、
ことを特徴とする分注装置。
【請求項4】
請求項3に記載の分注装置であって、
前記液体吸引条件は、液体吸引量、液体種類、ノズル種類、温度、湿度の少なくとも一つを含む、ことを特徴とする分注装置。
【請求項5】
請求項1から4のいずれか1項に記載の分注装置であって、
前記エア吸引速度は、前記液体吸引完了からの経過時間に応じて変化する可変値である、ことを特徴とする分注装置。
【請求項6】
請求項1から5のいずれか1項に記載の分注装置であって、
前記制御部は、分注処理の進行に伴い前記ノズル内の液体量が変化した場合には、前記エア吸引条件を再設定する、ことを特徴とする分注装置。
【請求項1】
液体の吸引および吐出を行う分注装置であって、
その内部に液体が保持されるノズルと、
前記ノズルを移動させる移動機構と、
前記ノズルを含む配管系の内圧を変化させることで、前記ノズルでの液体吸引および吐出を実行させるポンプと、
少なくとも、前記ノズルでの液体吸引完了から液体吐出開始までの間にノズル内で生じる液体蒸発に伴う内圧上昇を相殺し得る前記ノズル内のエア吸引速度を含むエア吸引条件をエア吸引設定情報として予め記憶した記憶手段と、
前記移動機構およびポンプの駆動を制御する制御手段であって、前記ノズルでの液体吸引完了から液体吐出開始までの間に前記エア吸引設定情報に規定されたエア吸引条件でのエア吸引を前記ポンプに指示する制御手段と、
を備えることを特徴とする分注装置。
【請求項2】
請求項1に記載の分注装置であって、
前記エア吸引条件は、さらに、吸引するエア量の上限値も含み、
前記制御手段は、前記エア吸引により吸引するエア吸引量が、前記上限値に達した場合には前記液体吐出開始前であっても、前記エア吸引を停止させる、
ことを特徴とする分注装置。
【請求項3】
請求項1または2に記載の分注装置であって、
前記エア吸引設定情報は、前記ノズルでの液体吸引条件ごとに異なる複数のエア吸引条件を記憶しており、
前記制御部は、実際に行う液体吸引の条件に基づいて、当該実際に行う液体吸引に適したエア吸引条件を選択する、
ことを特徴とする分注装置。
【請求項4】
請求項3に記載の分注装置であって、
前記液体吸引条件は、液体吸引量、液体種類、ノズル種類、温度、湿度の少なくとも一つを含む、ことを特徴とする分注装置。
【請求項5】
請求項1から4のいずれか1項に記載の分注装置であって、
前記エア吸引速度は、前記液体吸引完了からの経過時間に応じて変化する可変値である、ことを特徴とする分注装置。
【請求項6】
請求項1から5のいずれか1項に記載の分注装置であって、
前記制御部は、分注処理の進行に伴い前記ノズル内の液体量が変化した場合には、前記エア吸引条件を再設定する、ことを特徴とする分注装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】

【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2010−256200(P2010−256200A)
【公開日】平成22年11月11日(2010.11.11)
【国際特許分類】
【出願番号】特願2009−107437(P2009−107437)
【出願日】平成21年4月27日(2009.4.27)
【出願人】(390029791)アロカ株式会社 (899)
【Fターム(参考)】
【公開日】平成22年11月11日(2010.11.11)
【国際特許分類】
【出願日】平成21年4月27日(2009.4.27)
【出願人】(390029791)アロカ株式会社 (899)
【Fターム(参考)】
[ Back to top ]