
分注装置
【課題】ナノリットル量のような微量の液体を正確に分注できる分注装置を提供することにある。
【解決手段】先端と基端とを備え、先端を含む直線状の先端部2Aが所定間隔で配列された可撓性を有する複数の微細管2、複数の微細管の先端部2Aを所定の方向に方向付けるとともに、当該微細管の長手方向に移動可能に案内するガイド部材5と、複数の微細管の先端部2Aおよびガイド部材5を、液体を吐出させる対象物に対して相対的に移動させる移動機構と、複数の微細管の中途部を湾曲させることにより生じる復元力を利用して、複数の微細管2の各先端部を長手方向の一方向に向けて付勢する押圧板200とを有する。
【解決手段】先端と基端とを備え、先端を含む直線状の先端部2Aが所定間隔で配列された可撓性を有する複数の微細管2、複数の微細管の先端部2Aを所定の方向に方向付けるとともに、当該微細管の長手方向に移動可能に案内するガイド部材5と、複数の微細管の先端部2Aおよびガイド部材5を、液体を吐出させる対象物に対して相対的に移動させる移動機構と、複数の微細管の中途部を湾曲させることにより生じる復元力を利用して、複数の微細管2の各先端部を長手方向の一方向に向けて付勢する押圧板200とを有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、試料溶液等の液体を所望量吸い上げ、吸い上げた液体を分注位置に吐出する分注装置に関する。
【背景技術】
【0002】
現在、核酸やタンパク質、ペプチドなど生体試料や創薬試料のハイスループットスクリーニングや、ゲノミクス、プロテオミクスなどの網羅的生体活動解析に対するニーズが高まっていると共に、取り扱う試料も生体関連物質など不安定な性状の検体が多くなっている。このような技術分野では、複数種類の試料溶液をスライドガラスなどの基板上の数センチ四方という狭小領域に高密度に迅速に分注できる自動分注装置が必要とされている。
【0003】
このような技術分野においては、最低限マイクロリットル単位で分注量をコントロールする必要があり、さらに、ナノリットル単位の極めて微量な分注量のコントロールも必要となってきている。
【0004】
このため、本発明者は、複数の微微細管に接続されたポンプユニットを制御して、精密な分注量のコントロールを実現できる分注装置を提案している(特許文献1参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2009−186455号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
ところで、特許文献1に開示した分注装置では、各微微細管からの基板上への分注量は精密にコントロールできるが、複数の微細管間で、分注量がばらつくという問題があった。
【0007】
本発明の目的は、ナノリットル単位のような微量の液体を複数個所に精度良く分注できる分注装置を提供することにある。
【課題を解決するための手段】
【0008】
本発明者は、上記したような可撓性を有する複数の微細管を用いた分注装置において、液体を分注すべき基板等の表面に対する微細管の先端部の位置や姿勢のばらつきが、微細管の間の分注量のばらつきの原因の一つであることを見出した。
【0009】
このため、本発明の分注装置は、先端と基端とを備え、前記先端を含む直線状の先端部が所定間隔で配列された可撓性を有する複数の微細管と、前記複数の微細管の先端部を所定の方向に方向付けるとともに、当該微細管の長手方向に移動可能に案内するガイド手段と、前記複数の微細管の先端部およびガイド手段を、液体を吐出させる対象物に対して相対的に移動させる移動手段と、を有する。
【0010】
この構成によれば、可撓性を有する複数の微細管の直線状の先端部をガイド部材で一定方向に方向付けるとともに長手方向に移動可能にすることにより、各先端部の対象物の表面に対する方向が一定となる。
【0011】
本発明は、対象物の表面に対する前記複数の微細管の先端を位置合わせするための位置合わせ機構をさらに有する、構成を採用できる。
【0012】
この構成によれば、対象物の表面に対する複数の微細管の先端を位置合わせすることで、微細管の先端位置が一定する。
【0013】
上記構成において、前記位置合わせ機構は、前記複数の微細管の各先端部を前記長手方向のうちの一方向に向けて付勢する付勢手段と、前記各先端部に設けられたストッパと、
前記ストッパと係合して前記付勢手段による前記各先端部の前記一の方向への移動を規制する規制手段と、を有することを特徴とする、構成を採用できる。
【0014】
この構成によれば、各先端部は付勢手段により付勢されつつ、規制手段とストッパとの係合により、一定位置に位置決めされる。したがって、ストッパを設ける位置を複数の微細管間で一定にすることにより、各先端の位置を一定にすることができる。
【0015】
上記構成において、前記位置合わせ機構は、液体を吐出させる対象物の表面に前記複数の微細管の各先端を接触させた際に、前記先端部を前記対象物の表面に向けて弾性的に付勢する付勢機構を有する、構成を採用できる。
【0016】
この構成によれば、複数の微細管の各先端が確実に対象物の表面に接触し、当該表面に対する微細管の先端の位置が一定する。
【発明の効果】
【0017】
本発明によれば、複数の微細管間における分注量のばらつきを抑制できる。
【図面の簡単な説明】
【0018】
【図1】本発明の一実施形態に係る分注装置の概略構成を示す図である。
【図2】図1の分注装置の分注動作を示す図である。
【図3】分注ヘッドの概略構造を示す図である。
【図4】微細管の先端の位置合わせの原理を示す図である。
【図5】分注ヘッドの移動前後の微細管の先端部の状態を示す図である。
【図6】押圧板の変形例を示す図である。
【図7】復元力Fを方向付ける構成の一例を示す図である。
【図8】微細管にストッパを備えていない分注ヘッドの概略構成を示す図である。
【図9】本発明の他の実施形態に係る分注ヘッドの構成を示す図である。
【図10】本発明の他の実施形態に係る分注ヘッドの構成を示す図である。
【発明を実施するための最良の形態】
【0019】
以下、本発明の実施形態について、図を参照して詳細に説明する。
【0020】
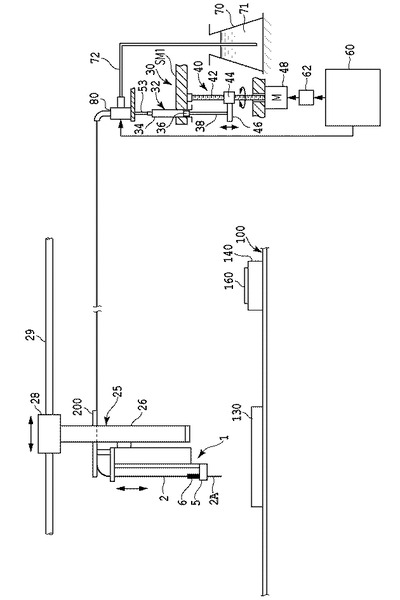
図1は、本発明の一実施形態に係る分注装置の概略構成図である。
【0021】
この分注装置は、複数の微細管2を保持する分注ヘッド1、分注ヘッド1を移動し位置決めする移動機構25、ポンプユニット30、コントローラ60、作動液タンク70、及び、分注ヘッド1の下方に配置されたテーブル100を有する。テーブル100には、マイクロタイタープレート130およびホルダ140が設けられている。
【0022】
分注ヘッド1は、複数の微細管2の先端部分を保持している。微細管2は、液体が流通する流路を備え、可撓性を有するように、ステンレス、溶融石英ガラス、合成石英ガラス等の材料から形成される。微細管2の内径は、微量の分注量を実現するためには、マイクロメータオーダーからナノメータオーダーの範囲内に設定される。しかし、このような範囲に限定されるわけではない。微細管2の内径、外径、長さなどの寸法は、微細管2を用いて分注する液体の量等に応じて最適化される。なお、分注ヘッド1の詳細構造については後述する。
【0023】
移動機構25は、図1に示すように、分注ヘッド1を移動可能に保持するフレーム26と、水平方向に設けられたレール29と、フレーム26を保持するとともにレール29に沿って移動可能に設けられたスライダ28とを有する。フレーム26は、分注ヘッド1を鉛直方向に移動させるモータ等から構成される機構を内蔵している。スライダ28は、レール29に沿ってフレーム26を移動させるためのモータ等から構成される機構を内蔵している。
【0024】
ポンプユニット30は、複数のシリンジポンプ32と、シリンジポンプ32を駆動するアクチュエータ40とを備える。複数の微細管2は、図1及び図2に示すように、三方弁80を介してポンプユニット30に接続されている。
【0025】
シリンジポンプ32は、シリンジバレル34と、このシリンジバレル34の内周に移動自在に嵌合するプランジャチップ36と、このプランジャチップ36に接続されたプランジャロッド38とを含む。シリンジバレル34は、接続管53を介して三方弁80に接続されている。また、複数のシリンジバレル34は、共通の支持部材SM1により支持され、複数のプランジャロッド38は共通の可動板46に連結されている。
【0026】
アクチュエータ40は、回転自在に支持されたねじ軸42と、このねじ軸42がねじ込まれるとともに上記した可動板46に連結された可動部材44と、ねじ軸42を回転させるステッピングモータ48を含む。
【0027】
ステッピングモータ48は、コントローラ60からの制御指令に応じた駆動電流がドライバ62から供給されることにより駆動される。ステッピングモータ48が駆動されると、可動板46が移動し、プランジャロッド38が前進又は後退する。
【0028】
三方弁80には、微細管2の基端、シリンジバレル34に通じる接続管53、及び作動液71を貯留する作動液タンク70に通じる導管72が接続されている。三方弁80は、電磁式又は電動式であり、コントローラ60からの制御指令に応答して、接続管53と微細管2との間および接続管53と導管72との間を選択的に接続する。作動液71は、非圧縮性の液体であり、好適には水である。
【0029】
マイクロタイタープレート130は、複数のウェルを備え、各ウェルに試料溶液が収容される。
【0030】
コントローラ60は、プロセッサ、メモリなどのハードウエアと所要のソフトウエアで構成される。コントローラ60は、ドライバ62にパルス指令を与えることによりステッピングモータ48を制御する。また、コントローラ60は、三方弁80に制御指令を与えて、三方弁80を作動させる。さらに、コントローラ60は、移動機構25に対して制御指令を与えて、分注ヘッド1の位置、すなわち、複数の微細管2の先端の位置をコントロールする。
【0031】
ここで、分注装置の分注動作について説明する。なお、分注動作は、コントローラ60により制御される。
【0032】
まず、三方弁80を制御してシリンジポンプ32と導管72とを連通させる。次いで、ステッピングモータ48を駆動してプランジャチップ36を後退させ、作動液タンク70から作動液71をシリンジバレル34内へ吸い上げる。次いで、三方弁80を制御してシリンジポンプ32と微細管2とを連通させるとともに、ステッピングモータ48を駆動してプランジャチップ36を前進させ、シリンジバレル34内の作動液71を接続管50及び微細管2へ送出する。作動液71のシリンジバレル34内への吸い上げ、及び、作動液71のシリンジバレル34から微細管2への送出を必要な回数だけ繰り返すことにより、微細管2の先端から、図示しない廃液溜めに作動液71が排出される。このとき、微細管2及びシリンジポンプ32に存在する空気も作動液71とともに外部に排出される。この結果、微細管2内の全てに作動液71が満たされる。
【0033】
次に、ステッピングモータ48を駆動してプランジャチップ36を後退させて、微細管2内の作動液71の液面の位置を上昇させ、微細管2の先端部内に空隙を形成する。このとき、微細管2の先端2eから作動液71の液面までの長さが所定長になるように、液面の位置は制御される。所定長は、例えば、数ミリメートルから数センチメートルの範囲に設定される。
【0034】
微細管2内の作動液71の液面の位置を調整したのち、分注ヘッド1をマイクロタイタープレート130に向けて移動させてマイクロタイタープレート130の所望のウェル131内に微細管2の先端を位置決めする。この結果、微細管2の先端2eは、ウェル内に収容された試料溶液内に浸漬される。
【0035】
次いで、ステッピングモータ48を駆動してプランジャチップ36を後退させて、微細管2内の作動液71の液面の位置を上昇させて所望量の試料溶液を微細管2内に吸い上げる。試料溶液を微細管2内に吸い上げる際には、微細管2内に吸い上げた試料溶液と微細管2内の作動液71の液面との間には空隙が介在する。これにより、試料溶液に作動液71が混入することがない。
【0036】
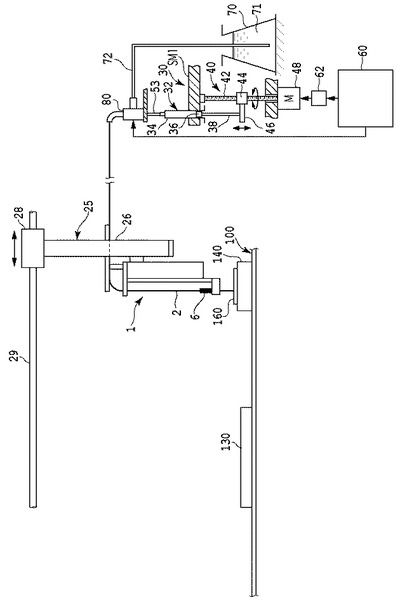
次いで、分注ヘッド1を移動機構25により移動させて、微細管2をマイクロタイタープレート130のウェルから取り出し、図2に示すように、微細管2をスライドガラス160上に位置決めする。そして、ステッピングモータ48を駆動してプランジャチップ36を前進させて、微細管2内の作動液71の液面の位置を下降させ、微細管2内に吸い上げた試料溶液をスライドガラス160上に吐出する。試料溶液は、複数の微細管2から同時にスライドガラス160上に分注される。試料溶液を吐出した後の微細管2内の作動液71の液面の位置は、空隙が形成されるように制御され、作動液71がスライドガラス160上に落下することはない。これにより、分注が完了する。
【0037】
次に、上記分注動作において、複数の微細管2間における試料溶液の分注量のばらつきを抑制するための構成について説明する。
【0038】
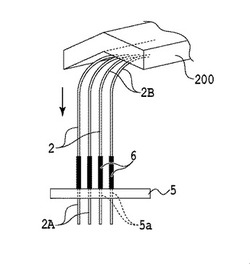
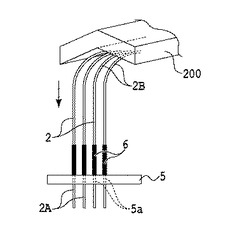
図3に示すように、分注ヘッド1には、ガイド部材5および押圧板200が設けられている。
【0039】
ガイド部材5は、所定の間隔で形成されたガイド孔5aを備え、このガイド孔aに、複数の微細管2の直線状の先端部2Aがそれぞれ挿入されている。ガイド部材5は、微細管2の先端部2Aを鉛直下方に方向付けるとともに、長手方向に微細管2を移動可能に案内する。なお、本実施形態では、ガイド部材5のガイド孔5aは、所定間隔で形成されているが、ガイド孔5aの間隔を変更できるピッチ可変機構を用いることも可能である。
【0040】
微細管2の先端部2Aの先端2eから所定距離の位置には、ストッパ6が設けられている。このストッパ6は、ガイド部材5の上端面と係合することにより、微細管2の先端部2Aの先端2eが鉛直下方向に移動するのを規制する。
【0041】
押圧板200は、複数の微細管2の中途部2Bを湾曲させつつ押圧するように設けられている。複数の微細管2は、図3に示すように湾曲すると、その弾性により直線状に復元しようとする復元力が生じる。この復元力が、先端部2Aを鉛直下方に向けて付勢する付勢力Fとして常時作用している。
【0042】
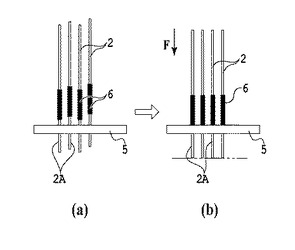
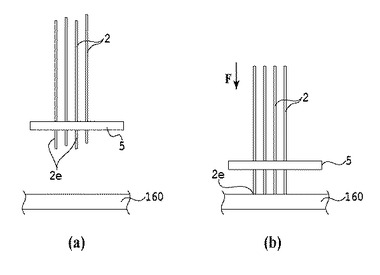
例えば、複数の微細管2は、外力が作用しない状態では、図4(a)に示すように、先端部2Aの先端2eの位置が揃わない。この状態で、分注すると、複数の微細管2の間で分注量がばらつく可能性がある。
【0043】
このため、上記した構成により、図4(b)に示すように、複数の微細管2の先端部2Aに付勢力Fを作用させると、先端部2Aの先端2eの位置が整列する。そして、複数の微細管2の先端部2Aに付勢力Fを常時印加していると、図5に示すように、分注ヘッド1の位置を移動させたとしても、先端部2Aの先端2eの位置を一定に保つことができる。
【0044】
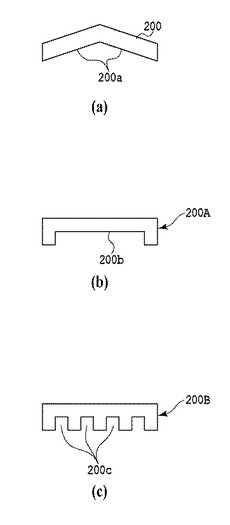
図6は、押圧板200の種々の形態を示している。図6(a)に示すように、複数の微細管2が接触する接触面を傾斜面200aとすることにより、複数の微細管2が傾斜面200aの中央部に位置付けられる。これにより、複数の微細管2を安定的に押圧することができる。また、図6(b)に示す押圧板200Aは、複数の微細管2を共通に収容する溝200bを備える。このような溝200bによっても、複数の微細管2の移動を規制することができる。さらに、図6(c)に示すように、各微細管2に対応した複数の溝200cを備える押圧板200Bを用いることも可能である。
【0045】
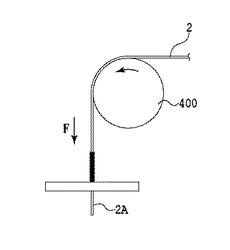
図7は、押圧板200により押圧された複数の微細管に作用する復元力を先端部2Aの長手方向に方向付ける部材の一例を示している。上記したような押圧板200に加えて、図7に示すようなプーリー400の外周面で複数の微細管2をガイドして、微細管2の先端部2Aに作用する付勢力Fを鉛直下方に方向付けることも可能である。
【0046】
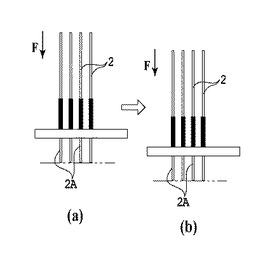
上記実施形態では、複数の微細管2の先端部2Aにストッパ6を設けて、鉛直下方への移動を規制する構成としたが、図8に示すように、ストッパ6を設けない構成も可能である。
【0047】
図8(a)に示す状態では、複数の微細管2の先端部2Aは、ガイド部材5から規制力を受けないので、複数の微細管2の先端2eの位置は揃っていない。この状態から、分注ヘッド1を移動させて、複数の微細管2の先端2eをスライドガラス160の表面に当接させると、複数の微細管2の先端2eには、スライドガラス160から鉛直上方に向かう力を受ける。一方、複数の微細管2の中途部2Bは、上記した押圧板200により押圧されているので、複数の微細管2の先端2eがスライドガラス160に当接すると、鉛直下向きの付勢力Fが発生する。これにより、複数の微細管2の先端2eは、スライドガラス160の表面に確実に接触し、スライドガラス160の表面に対して先端2eの位置が一定に保持されることになる。
【0048】
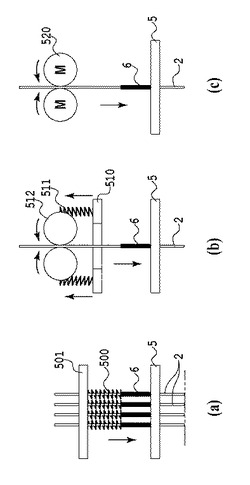
図9は、複数の微細管2の先端部2Aを付勢する付勢機構の他の例を示す。
図9(a)は、ストッパ6と規制板501との間にバネなどの弾性部材500を設け、先端部2Aを鉛直下方に向けて常時付勢する構成を示す。図9(B)は、保持板510にバネ511を介して回転自在に保持された2つのローラ部材512で複数の微細管2を挟み、先端部2Aを鉛直下方に向けて常時付勢する構成を示す。図9(c)は、弾性力を用いずに、モータ520などのアクチュエータを用いて、先端部2Aを鉛直下方に向けて常時付勢する構成を示す。
【0049】
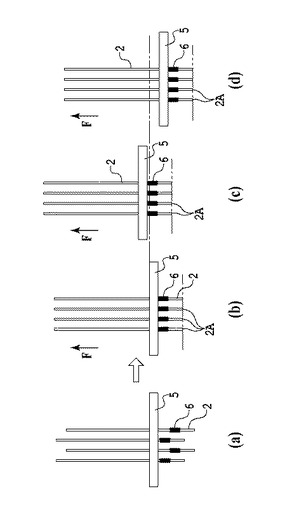
上記実施形態では、複数の微細管2の先端部2Aを鉛直下方に向けて付勢する場合について説明したが、本発明はこれに限定されない。例えば、図10に示すように、規制手段としてのガイド部材5とストッパ6との位置関係を上下逆にし、複数の微細管2の先端部2Aに鉛直上向きの付勢力Fを付与する構成も可能である。なお、この場合の付勢においても、微細管2の復元力、バネ等の弾性力、モータ等のアクチュエータの力を適用できる。
【0050】
上記実施形態では、分注ヘッド1を移動させる構成としたが、分注ヘッド1を固定し、スライドガラス等を置くステージを移動させる構成とすることも可能である。
【0051】
また、上記実施形態では、ガイド手段として、ガイド部材5を例として挙げたが、これに限定されるわけではなく、微細管2の先端部2Aの直線性を保ちつつ所定方向に方向付けるとともに、先端部2Aを長手方向に移動可能に案内する構造であればよい。
【符号の説明】
【0052】
1…分注ヘッド
2…微細管
2A…先端部
2B…中途部
2e…先端
5…ガイド部材
5a…ガイド孔
6…ストッパ
25…移動機構
26…フレーム
28…スライダ
29…レール
30…ポンプユニット
32…シリンジポンプ
34…シリンジバレル
36…プランジャチップ
38…プランジャロッド
40…アクチュエータ
42…ねじ軸
44…可動部材
46…可動板
48…ステッピングモータ
53…接続管
60…コントローラ
62…ドライバ
70…作動液タンク
71…作動液
72…導管
80…三方弁
100…テーブル
130…マイクロタイタープレート
140…ホルダ
160…スライドガラス200…押圧板
200A…押圧板
200a…傾斜面
200B…押圧板
200b…溝
200c…溝
400…プーリー
500…弾性部材
501…規制板
510…保持板
511…バネ
512…ローラ部材
520…モータ
F…付勢力
SM1…支持部材
【技術分野】
【0001】
本発明は、試料溶液等の液体を所望量吸い上げ、吸い上げた液体を分注位置に吐出する分注装置に関する。
【背景技術】
【0002】
現在、核酸やタンパク質、ペプチドなど生体試料や創薬試料のハイスループットスクリーニングや、ゲノミクス、プロテオミクスなどの網羅的生体活動解析に対するニーズが高まっていると共に、取り扱う試料も生体関連物質など不安定な性状の検体が多くなっている。このような技術分野では、複数種類の試料溶液をスライドガラスなどの基板上の数センチ四方という狭小領域に高密度に迅速に分注できる自動分注装置が必要とされている。
【0003】
このような技術分野においては、最低限マイクロリットル単位で分注量をコントロールする必要があり、さらに、ナノリットル単位の極めて微量な分注量のコントロールも必要となってきている。
【0004】
このため、本発明者は、複数の微微細管に接続されたポンプユニットを制御して、精密な分注量のコントロールを実現できる分注装置を提案している(特許文献1参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2009−186455号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
ところで、特許文献1に開示した分注装置では、各微微細管からの基板上への分注量は精密にコントロールできるが、複数の微細管間で、分注量がばらつくという問題があった。
【0007】
本発明の目的は、ナノリットル単位のような微量の液体を複数個所に精度良く分注できる分注装置を提供することにある。
【課題を解決するための手段】
【0008】
本発明者は、上記したような可撓性を有する複数の微細管を用いた分注装置において、液体を分注すべき基板等の表面に対する微細管の先端部の位置や姿勢のばらつきが、微細管の間の分注量のばらつきの原因の一つであることを見出した。
【0009】
このため、本発明の分注装置は、先端と基端とを備え、前記先端を含む直線状の先端部が所定間隔で配列された可撓性を有する複数の微細管と、前記複数の微細管の先端部を所定の方向に方向付けるとともに、当該微細管の長手方向に移動可能に案内するガイド手段と、前記複数の微細管の先端部およびガイド手段を、液体を吐出させる対象物に対して相対的に移動させる移動手段と、を有する。
【0010】
この構成によれば、可撓性を有する複数の微細管の直線状の先端部をガイド部材で一定方向に方向付けるとともに長手方向に移動可能にすることにより、各先端部の対象物の表面に対する方向が一定となる。
【0011】
本発明は、対象物の表面に対する前記複数の微細管の先端を位置合わせするための位置合わせ機構をさらに有する、構成を採用できる。
【0012】
この構成によれば、対象物の表面に対する複数の微細管の先端を位置合わせすることで、微細管の先端位置が一定する。
【0013】
上記構成において、前記位置合わせ機構は、前記複数の微細管の各先端部を前記長手方向のうちの一方向に向けて付勢する付勢手段と、前記各先端部に設けられたストッパと、
前記ストッパと係合して前記付勢手段による前記各先端部の前記一の方向への移動を規制する規制手段と、を有することを特徴とする、構成を採用できる。
【0014】
この構成によれば、各先端部は付勢手段により付勢されつつ、規制手段とストッパとの係合により、一定位置に位置決めされる。したがって、ストッパを設ける位置を複数の微細管間で一定にすることにより、各先端の位置を一定にすることができる。
【0015】
上記構成において、前記位置合わせ機構は、液体を吐出させる対象物の表面に前記複数の微細管の各先端を接触させた際に、前記先端部を前記対象物の表面に向けて弾性的に付勢する付勢機構を有する、構成を採用できる。
【0016】
この構成によれば、複数の微細管の各先端が確実に対象物の表面に接触し、当該表面に対する微細管の先端の位置が一定する。
【発明の効果】
【0017】
本発明によれば、複数の微細管間における分注量のばらつきを抑制できる。
【図面の簡単な説明】
【0018】
【図1】本発明の一実施形態に係る分注装置の概略構成を示す図である。
【図2】図1の分注装置の分注動作を示す図である。
【図3】分注ヘッドの概略構造を示す図である。
【図4】微細管の先端の位置合わせの原理を示す図である。
【図5】分注ヘッドの移動前後の微細管の先端部の状態を示す図である。
【図6】押圧板の変形例を示す図である。
【図7】復元力Fを方向付ける構成の一例を示す図である。
【図8】微細管にストッパを備えていない分注ヘッドの概略構成を示す図である。
【図9】本発明の他の実施形態に係る分注ヘッドの構成を示す図である。
【図10】本発明の他の実施形態に係る分注ヘッドの構成を示す図である。
【発明を実施するための最良の形態】
【0019】
以下、本発明の実施形態について、図を参照して詳細に説明する。
【0020】
図1は、本発明の一実施形態に係る分注装置の概略構成図である。
【0021】
この分注装置は、複数の微細管2を保持する分注ヘッド1、分注ヘッド1を移動し位置決めする移動機構25、ポンプユニット30、コントローラ60、作動液タンク70、及び、分注ヘッド1の下方に配置されたテーブル100を有する。テーブル100には、マイクロタイタープレート130およびホルダ140が設けられている。
【0022】
分注ヘッド1は、複数の微細管2の先端部分を保持している。微細管2は、液体が流通する流路を備え、可撓性を有するように、ステンレス、溶融石英ガラス、合成石英ガラス等の材料から形成される。微細管2の内径は、微量の分注量を実現するためには、マイクロメータオーダーからナノメータオーダーの範囲内に設定される。しかし、このような範囲に限定されるわけではない。微細管2の内径、外径、長さなどの寸法は、微細管2を用いて分注する液体の量等に応じて最適化される。なお、分注ヘッド1の詳細構造については後述する。
【0023】
移動機構25は、図1に示すように、分注ヘッド1を移動可能に保持するフレーム26と、水平方向に設けられたレール29と、フレーム26を保持するとともにレール29に沿って移動可能に設けられたスライダ28とを有する。フレーム26は、分注ヘッド1を鉛直方向に移動させるモータ等から構成される機構を内蔵している。スライダ28は、レール29に沿ってフレーム26を移動させるためのモータ等から構成される機構を内蔵している。
【0024】
ポンプユニット30は、複数のシリンジポンプ32と、シリンジポンプ32を駆動するアクチュエータ40とを備える。複数の微細管2は、図1及び図2に示すように、三方弁80を介してポンプユニット30に接続されている。
【0025】
シリンジポンプ32は、シリンジバレル34と、このシリンジバレル34の内周に移動自在に嵌合するプランジャチップ36と、このプランジャチップ36に接続されたプランジャロッド38とを含む。シリンジバレル34は、接続管53を介して三方弁80に接続されている。また、複数のシリンジバレル34は、共通の支持部材SM1により支持され、複数のプランジャロッド38は共通の可動板46に連結されている。
【0026】
アクチュエータ40は、回転自在に支持されたねじ軸42と、このねじ軸42がねじ込まれるとともに上記した可動板46に連結された可動部材44と、ねじ軸42を回転させるステッピングモータ48を含む。
【0027】
ステッピングモータ48は、コントローラ60からの制御指令に応じた駆動電流がドライバ62から供給されることにより駆動される。ステッピングモータ48が駆動されると、可動板46が移動し、プランジャロッド38が前進又は後退する。
【0028】
三方弁80には、微細管2の基端、シリンジバレル34に通じる接続管53、及び作動液71を貯留する作動液タンク70に通じる導管72が接続されている。三方弁80は、電磁式又は電動式であり、コントローラ60からの制御指令に応答して、接続管53と微細管2との間および接続管53と導管72との間を選択的に接続する。作動液71は、非圧縮性の液体であり、好適には水である。
【0029】
マイクロタイタープレート130は、複数のウェルを備え、各ウェルに試料溶液が収容される。
【0030】
コントローラ60は、プロセッサ、メモリなどのハードウエアと所要のソフトウエアで構成される。コントローラ60は、ドライバ62にパルス指令を与えることによりステッピングモータ48を制御する。また、コントローラ60は、三方弁80に制御指令を与えて、三方弁80を作動させる。さらに、コントローラ60は、移動機構25に対して制御指令を与えて、分注ヘッド1の位置、すなわち、複数の微細管2の先端の位置をコントロールする。
【0031】
ここで、分注装置の分注動作について説明する。なお、分注動作は、コントローラ60により制御される。
【0032】
まず、三方弁80を制御してシリンジポンプ32と導管72とを連通させる。次いで、ステッピングモータ48を駆動してプランジャチップ36を後退させ、作動液タンク70から作動液71をシリンジバレル34内へ吸い上げる。次いで、三方弁80を制御してシリンジポンプ32と微細管2とを連通させるとともに、ステッピングモータ48を駆動してプランジャチップ36を前進させ、シリンジバレル34内の作動液71を接続管50及び微細管2へ送出する。作動液71のシリンジバレル34内への吸い上げ、及び、作動液71のシリンジバレル34から微細管2への送出を必要な回数だけ繰り返すことにより、微細管2の先端から、図示しない廃液溜めに作動液71が排出される。このとき、微細管2及びシリンジポンプ32に存在する空気も作動液71とともに外部に排出される。この結果、微細管2内の全てに作動液71が満たされる。
【0033】
次に、ステッピングモータ48を駆動してプランジャチップ36を後退させて、微細管2内の作動液71の液面の位置を上昇させ、微細管2の先端部内に空隙を形成する。このとき、微細管2の先端2eから作動液71の液面までの長さが所定長になるように、液面の位置は制御される。所定長は、例えば、数ミリメートルから数センチメートルの範囲に設定される。
【0034】
微細管2内の作動液71の液面の位置を調整したのち、分注ヘッド1をマイクロタイタープレート130に向けて移動させてマイクロタイタープレート130の所望のウェル131内に微細管2の先端を位置決めする。この結果、微細管2の先端2eは、ウェル内に収容された試料溶液内に浸漬される。
【0035】
次いで、ステッピングモータ48を駆動してプランジャチップ36を後退させて、微細管2内の作動液71の液面の位置を上昇させて所望量の試料溶液を微細管2内に吸い上げる。試料溶液を微細管2内に吸い上げる際には、微細管2内に吸い上げた試料溶液と微細管2内の作動液71の液面との間には空隙が介在する。これにより、試料溶液に作動液71が混入することがない。
【0036】
次いで、分注ヘッド1を移動機構25により移動させて、微細管2をマイクロタイタープレート130のウェルから取り出し、図2に示すように、微細管2をスライドガラス160上に位置決めする。そして、ステッピングモータ48を駆動してプランジャチップ36を前進させて、微細管2内の作動液71の液面の位置を下降させ、微細管2内に吸い上げた試料溶液をスライドガラス160上に吐出する。試料溶液は、複数の微細管2から同時にスライドガラス160上に分注される。試料溶液を吐出した後の微細管2内の作動液71の液面の位置は、空隙が形成されるように制御され、作動液71がスライドガラス160上に落下することはない。これにより、分注が完了する。
【0037】
次に、上記分注動作において、複数の微細管2間における試料溶液の分注量のばらつきを抑制するための構成について説明する。
【0038】
図3に示すように、分注ヘッド1には、ガイド部材5および押圧板200が設けられている。
【0039】
ガイド部材5は、所定の間隔で形成されたガイド孔5aを備え、このガイド孔aに、複数の微細管2の直線状の先端部2Aがそれぞれ挿入されている。ガイド部材5は、微細管2の先端部2Aを鉛直下方に方向付けるとともに、長手方向に微細管2を移動可能に案内する。なお、本実施形態では、ガイド部材5のガイド孔5aは、所定間隔で形成されているが、ガイド孔5aの間隔を変更できるピッチ可変機構を用いることも可能である。
【0040】
微細管2の先端部2Aの先端2eから所定距離の位置には、ストッパ6が設けられている。このストッパ6は、ガイド部材5の上端面と係合することにより、微細管2の先端部2Aの先端2eが鉛直下方向に移動するのを規制する。
【0041】
押圧板200は、複数の微細管2の中途部2Bを湾曲させつつ押圧するように設けられている。複数の微細管2は、図3に示すように湾曲すると、その弾性により直線状に復元しようとする復元力が生じる。この復元力が、先端部2Aを鉛直下方に向けて付勢する付勢力Fとして常時作用している。
【0042】
例えば、複数の微細管2は、外力が作用しない状態では、図4(a)に示すように、先端部2Aの先端2eの位置が揃わない。この状態で、分注すると、複数の微細管2の間で分注量がばらつく可能性がある。
【0043】
このため、上記した構成により、図4(b)に示すように、複数の微細管2の先端部2Aに付勢力Fを作用させると、先端部2Aの先端2eの位置が整列する。そして、複数の微細管2の先端部2Aに付勢力Fを常時印加していると、図5に示すように、分注ヘッド1の位置を移動させたとしても、先端部2Aの先端2eの位置を一定に保つことができる。
【0044】
図6は、押圧板200の種々の形態を示している。図6(a)に示すように、複数の微細管2が接触する接触面を傾斜面200aとすることにより、複数の微細管2が傾斜面200aの中央部に位置付けられる。これにより、複数の微細管2を安定的に押圧することができる。また、図6(b)に示す押圧板200Aは、複数の微細管2を共通に収容する溝200bを備える。このような溝200bによっても、複数の微細管2の移動を規制することができる。さらに、図6(c)に示すように、各微細管2に対応した複数の溝200cを備える押圧板200Bを用いることも可能である。
【0045】
図7は、押圧板200により押圧された複数の微細管に作用する復元力を先端部2Aの長手方向に方向付ける部材の一例を示している。上記したような押圧板200に加えて、図7に示すようなプーリー400の外周面で複数の微細管2をガイドして、微細管2の先端部2Aに作用する付勢力Fを鉛直下方に方向付けることも可能である。
【0046】
上記実施形態では、複数の微細管2の先端部2Aにストッパ6を設けて、鉛直下方への移動を規制する構成としたが、図8に示すように、ストッパ6を設けない構成も可能である。
【0047】
図8(a)に示す状態では、複数の微細管2の先端部2Aは、ガイド部材5から規制力を受けないので、複数の微細管2の先端2eの位置は揃っていない。この状態から、分注ヘッド1を移動させて、複数の微細管2の先端2eをスライドガラス160の表面に当接させると、複数の微細管2の先端2eには、スライドガラス160から鉛直上方に向かう力を受ける。一方、複数の微細管2の中途部2Bは、上記した押圧板200により押圧されているので、複数の微細管2の先端2eがスライドガラス160に当接すると、鉛直下向きの付勢力Fが発生する。これにより、複数の微細管2の先端2eは、スライドガラス160の表面に確実に接触し、スライドガラス160の表面に対して先端2eの位置が一定に保持されることになる。
【0048】
図9は、複数の微細管2の先端部2Aを付勢する付勢機構の他の例を示す。
図9(a)は、ストッパ6と規制板501との間にバネなどの弾性部材500を設け、先端部2Aを鉛直下方に向けて常時付勢する構成を示す。図9(B)は、保持板510にバネ511を介して回転自在に保持された2つのローラ部材512で複数の微細管2を挟み、先端部2Aを鉛直下方に向けて常時付勢する構成を示す。図9(c)は、弾性力を用いずに、モータ520などのアクチュエータを用いて、先端部2Aを鉛直下方に向けて常時付勢する構成を示す。
【0049】
上記実施形態では、複数の微細管2の先端部2Aを鉛直下方に向けて付勢する場合について説明したが、本発明はこれに限定されない。例えば、図10に示すように、規制手段としてのガイド部材5とストッパ6との位置関係を上下逆にし、複数の微細管2の先端部2Aに鉛直上向きの付勢力Fを付与する構成も可能である。なお、この場合の付勢においても、微細管2の復元力、バネ等の弾性力、モータ等のアクチュエータの力を適用できる。
【0050】
上記実施形態では、分注ヘッド1を移動させる構成としたが、分注ヘッド1を固定し、スライドガラス等を置くステージを移動させる構成とすることも可能である。
【0051】
また、上記実施形態では、ガイド手段として、ガイド部材5を例として挙げたが、これに限定されるわけではなく、微細管2の先端部2Aの直線性を保ちつつ所定方向に方向付けるとともに、先端部2Aを長手方向に移動可能に案内する構造であればよい。
【符号の説明】
【0052】
1…分注ヘッド
2…微細管
2A…先端部
2B…中途部
2e…先端
5…ガイド部材
5a…ガイド孔
6…ストッパ
25…移動機構
26…フレーム
28…スライダ
29…レール
30…ポンプユニット
32…シリンジポンプ
34…シリンジバレル
36…プランジャチップ
38…プランジャロッド
40…アクチュエータ
42…ねじ軸
44…可動部材
46…可動板
48…ステッピングモータ
53…接続管
60…コントローラ
62…ドライバ
70…作動液タンク
71…作動液
72…導管
80…三方弁
100…テーブル
130…マイクロタイタープレート
140…ホルダ
160…スライドガラス200…押圧板
200A…押圧板
200a…傾斜面
200B…押圧板
200b…溝
200c…溝
400…プーリー
500…弾性部材
501…規制板
510…保持板
511…バネ
512…ローラ部材
520…モータ
F…付勢力
SM1…支持部材
【特許請求の範囲】
【請求項1】
先端と基端とを備え、前記先端を含む直線状の先端部が所定間隔で配列された可撓性を有する複数の微細管と、
前記複数の微細管の先端部を所定の方向に方向付けるとともに、当該微細管の長手方向に移動可能に案内するガイド手段と、
前記複数の微細管の先端部およびガイド手段を、液体を吐出させる対象物に対して相対的に移動させる移動手段と、を有することを特徴とする分注装置。
【請求項2】
前記対象物の表面に対して前記複数の微細管の先端を一定位置に位置合わせするための位置合わせ機構をさらに有する、ことを特徴とする請求項1に記載の分注装置。
【請求項3】
前記位置合わせ機構は、前記複数の微細管の各先端部を前記長手方向のうちの一方向に向けて付勢する付勢手段と、
前記各先端部に設けられたストッパと、
前記ストッパと係合して、前記付勢手段による前記各先端部の前記一の方向への移動を規制する規制手段と、を有することを特徴とする、請求項2に記載の分注装置。
【請求項4】
前記付勢手段は、前記複数の微細管の先端部を除く中途部を湾曲させることにより生じる復元力を利用して、前記複数の微細管の各先端部を前記長手方向の一方向に向けて付勢する、ことを特徴とする請求項3に記載の分注装置。
【請求項5】
前記付勢手段は、前記復元力を生じさせるために、前記複数の微細管の中途部を湾曲させつつ押圧する押圧部材を含む、ことを特徴とする請求項4に記載の分注装置。
【請求項6】
前記付勢手段は、前記押圧部材により押圧された前記複数の微細管に作用する復元力を前記先端部の長手方向に方向付ける部材をさらに有する請求項5に記載の分注装置。
【請求項7】
前記位置合わせ機構は、液体を吐出させる対象物の表面に前記複数の微細管の各先端を接触させた際に、前記先端部を前記対象物の表面に向けて弾性的に付勢する付勢機構を有する、ことを特徴とする請求項2に記載の分注装置。
【請求項8】
前記付勢手段は、前記複数の微細管の先端部を除く中途部を湾曲させることにより生じる復元力を利用して、前記複数の微細管の各先端部を前記長手方向の先端側に向けて付勢する、ことを特徴とする請求項7に記載の分注装置。
【請求項9】
前記付勢手段は、前記復元力を生じさせるために、前記複数の微細管の中途部を湾曲させつつ押圧する押圧部材を含む、ことを特徴とする請求項8に記載の分注装置。
【請求項10】
前記付勢手段は、前記押圧部材により押圧された前記複数の微細管に作用する復元力を前記先端部の長手方向に方向付ける部材をさらに有する請求項9に記載の分注装置。
【請求項11】
前記位置合わせ機構は、前記複数の微細管の各先端部を前記長手方向の先端側に向けて弾性的に付勢する付勢手段と、
前記各先端部に設けられたストッパと、
前記付勢手段による前記各先端部の前記先端側への移動を規制する規制手段と、を有することを特徴とする、請求項7に記載の分注装置。
【請求項1】
先端と基端とを備え、前記先端を含む直線状の先端部が所定間隔で配列された可撓性を有する複数の微細管と、
前記複数の微細管の先端部を所定の方向に方向付けるとともに、当該微細管の長手方向に移動可能に案内するガイド手段と、
前記複数の微細管の先端部およびガイド手段を、液体を吐出させる対象物に対して相対的に移動させる移動手段と、を有することを特徴とする分注装置。
【請求項2】
前記対象物の表面に対して前記複数の微細管の先端を一定位置に位置合わせするための位置合わせ機構をさらに有する、ことを特徴とする請求項1に記載の分注装置。
【請求項3】
前記位置合わせ機構は、前記複数の微細管の各先端部を前記長手方向のうちの一方向に向けて付勢する付勢手段と、
前記各先端部に設けられたストッパと、
前記ストッパと係合して、前記付勢手段による前記各先端部の前記一の方向への移動を規制する規制手段と、を有することを特徴とする、請求項2に記載の分注装置。
【請求項4】
前記付勢手段は、前記複数の微細管の先端部を除く中途部を湾曲させることにより生じる復元力を利用して、前記複数の微細管の各先端部を前記長手方向の一方向に向けて付勢する、ことを特徴とする請求項3に記載の分注装置。
【請求項5】
前記付勢手段は、前記復元力を生じさせるために、前記複数の微細管の中途部を湾曲させつつ押圧する押圧部材を含む、ことを特徴とする請求項4に記載の分注装置。
【請求項6】
前記付勢手段は、前記押圧部材により押圧された前記複数の微細管に作用する復元力を前記先端部の長手方向に方向付ける部材をさらに有する請求項5に記載の分注装置。
【請求項7】
前記位置合わせ機構は、液体を吐出させる対象物の表面に前記複数の微細管の各先端を接触させた際に、前記先端部を前記対象物の表面に向けて弾性的に付勢する付勢機構を有する、ことを特徴とする請求項2に記載の分注装置。
【請求項8】
前記付勢手段は、前記複数の微細管の先端部を除く中途部を湾曲させることにより生じる復元力を利用して、前記複数の微細管の各先端部を前記長手方向の先端側に向けて付勢する、ことを特徴とする請求項7に記載の分注装置。
【請求項9】
前記付勢手段は、前記復元力を生じさせるために、前記複数の微細管の中途部を湾曲させつつ押圧する押圧部材を含む、ことを特徴とする請求項8に記載の分注装置。
【請求項10】
前記付勢手段は、前記押圧部材により押圧された前記複数の微細管に作用する復元力を前記先端部の長手方向に方向付ける部材をさらに有する請求項9に記載の分注装置。
【請求項11】
前記位置合わせ機構は、前記複数の微細管の各先端部を前記長手方向の先端側に向けて弾性的に付勢する付勢手段と、
前記各先端部に設けられたストッパと、
前記付勢手段による前記各先端部の前記先端側への移動を規制する規制手段と、を有することを特徴とする、請求項7に記載の分注装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2012−141177(P2012−141177A)
【公開日】平成24年7月26日(2012.7.26)
【国際特許分類】
【出願番号】特願2010−292724(P2010−292724)
【出願日】平成22年12月28日(2010.12.28)
【出願人】(301021533)独立行政法人産業技術総合研究所 (6,529)
【Fターム(参考)】
【公開日】平成24年7月26日(2012.7.26)
【国際特許分類】
【出願日】平成22年12月28日(2010.12.28)
【出願人】(301021533)独立行政法人産業技術総合研究所 (6,529)
【Fターム(参考)】
[ Back to top ]