
分注装置
【課題】ディッシュの内底面の周囲部分を含む領域に対して、シリンジのノズルから吐出した液体を直接掛けることが可能な分注装置を提供する。
【解決手段】底面及び前記底面を囲む側面を有して形成されるディッシュが装着されるディッシュ装着部と、液体を吐出するノズルを有するシリンジと、前記ディッシュ装着部を前記シリンジに向けて傾斜させると共に、前記シリンジのノズルを前記ディッシュの内底面に垂直に向けた際の前記ノズルから前記内底面に至る垂線の向きを基準に、前記シリンジのノズルの向きを、前記ディッシュの内底面と内側面とが接する領域上において向かい合う2つの位置を結ぶ第1方向と、前記第1方向に交差する第2方向とにそれぞれ変える駆動部と、前記シリンジのノズルから液体を吐出させる制御部と、を備えることを特徴とする分注装置。
【解決手段】底面及び前記底面を囲む側面を有して形成されるディッシュが装着されるディッシュ装着部と、液体を吐出するノズルを有するシリンジと、前記ディッシュ装着部を前記シリンジに向けて傾斜させると共に、前記シリンジのノズルを前記ディッシュの内底面に垂直に向けた際の前記ノズルから前記内底面に至る垂線の向きを基準に、前記シリンジのノズルの向きを、前記ディッシュの内底面と内側面とが接する領域上において向かい合う2つの位置を結ぶ第1方向と、前記第1方向に交差する第2方向とにそれぞれ変える駆動部と、前記シリンジのノズルから液体を吐出させる制御部と、を備えることを特徴とする分注装置。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、分注装置に関する。
【背景技術】
【0002】
シリンジなどを用いてノズルから液体を吐出する分注装置は、様々な用途に用いられている。
【0003】
例えば、特許文献1では、ディッシュ(培養容器)に対するピペッティング操作に用いられる分注装置(ピペット装置)を備えた自動細胞培養装置が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−291103号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ここで、例えばディッシュ内で細胞を培養する場合や、細胞を継代する場合などには、ディッシュ内の培地を新しい培地に交換する作業や、細胞の培養完了後にディッシュから培地を回収する作業、細胞を回収する作業、単離細胞にする作業、コロニーを所定のサイズに調整する作業などが行われるが、このような作業を行う際には、古い培地や試薬、細胞懸濁液を効率良く回収するとともに、新しい培地や試薬を細胞培養面全面に亘って速やかに行き渡らせる等の配慮が求められる。
【0006】
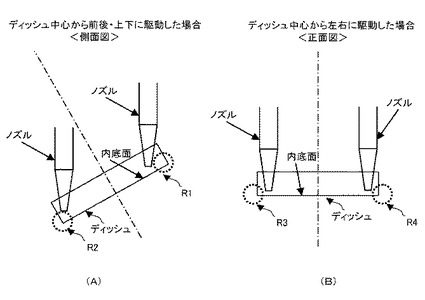
ところが、例えば図11に示すように、これまでの分注装置では、ディッシュの内底面の周囲部分には、シリンジのノズルから吐出した液体を直接掛けることができない領域が生じていた。そのため、吐出した液体を直接掛けることができない領域には細胞が残ってしまう問題があった。また、トリプシンなどの剥離剤によって剥がれかけ軽く付着した細胞や、ディッシュ底面に沈殿、粘着した細胞などは、液体を所定時間、所定流量で直接掛けることができないと回収できない問題があった。
【0007】
図11(A)のように、ディッシュを傾斜させてノズルから液体を吐出する場合に、ディッシュの内底面の周囲の領域のうち最上部近傍の領域(R1で示す領域)には、シリンジのノズルが鉛直方向に向いているため、傾斜させたディッシュの側面とノズルとが干渉することにより、ノズルから吐出した液体を直接掛けることができない。またディッシュの内底面の周囲の領域のうち最下部近傍の領域(R2で示す領域)には、ノズルから吐出した液体が直ちに貯留してしまうため、ノズルから吐出した液体を直接掛けることができない。
【0008】
また図11(B)のように、ディッシュを傾斜させてノズルから液体を吐出する場合に、ディッシュの内底面の周囲の領域のうち最上部及び最下部の中間付近の領域(R3、R4で示す領域)には、領域R1と同様に、シリンジのノズルが鉛直方向に向いているため、ディッシュの側面とノズルとが干渉することにより、ノズルから吐出した液体を直接掛けることができない。
【0009】
本発明は上記課題を鑑みてなされたものであり、ディッシュの内底面の周囲部分を含む領域に対して、シリンジのノズルから吐出した液体を所定時間、所定流量で直接掛けることが可能な分注装置を提供することを一つの目的とする。
【課題を解決するための手段】
【0010】
上記目的を達成するため、本発明の一つの側面に係る分注装置は、底面及び前記底面を囲む側面を有して形成されるディッシュが装着されるディッシュ装着部と、液体を吐出するノズルを有するシリンジと、前記ディッシュ装着部を前記シリンジに向けて傾斜させると共に、前記シリンジのノズルを前記ディッシュの内底面に垂直に向けた際の前記ノズルから前記内底面に至る垂線の向きを基準に、前記シリンジのノズルの向きを、前記ディッシュの内底面と内側面とが接する領域上において向かい合う2つの位置を結ぶ第1方向と、前記第1方向に交差する第2方向とにそれぞれ変える駆動部と、前記シリンジのノズルから液体を吐出させる制御部と、を備える。
【発明の効果】
【0011】
ディッシュの内底面の周囲部分を含む領域に対して、シリンジのノズルから吐出した液体を所定時間、所定流量で直接掛けることが可能な分注装置を提供する。
【図面の簡単な説明】
【0012】
【図1】本発明の一実施形態における分注装置の全体構成図である。
【図2】本発明の一実施形態における分注装置が有する分注機構の構成を示すブロック図である。
【図3】本発明の一実施形態における第1駆動機構、第3駆動機構、第4駆動機構を示す図である。
【図4】本発明の一実施形態における第2駆動機構を示す図である。
【図5】本発明の一実施形態における第5駆動機構を示す図である。
【図6】本発明の一実施形態における制御部を示すブロック図である。
【図7】本発明の一実施形態における分注装置を用いた液体の充填、分注、吸引、放出動作の一例を説明する図である。
【図8】本発明の一実施形態における分注装置の制御の流れを説明するフローチャートである。
【図9】本発明の一実施形態における分注装置の制御を説明するための図である。
【図10】本発明の一実施形態における分注装置の制御を説明するための図である。
【図11】シリンジのノズルからディッシュに吐出した液体が直接掛からない領域を説明するための図である。
【発明を実施するための形態】
【0013】
本明細書および添付図面の記載により、少なくとも以下の事項が明らかとなる。
【0014】
===分注装置の構成===
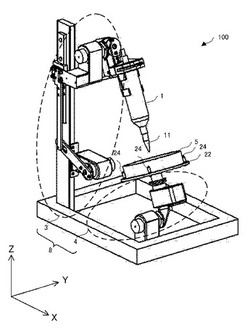
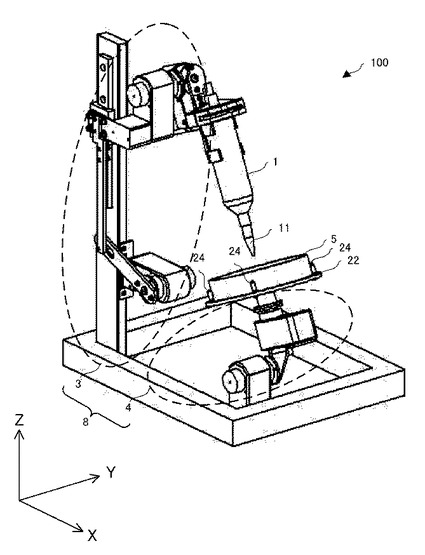
図1を参照して、本発明の一実施形態における分注装置100の構成について説明する。
図1は、本実施形態の分注機構101を備えた分注装置100の適用例として、細胞培養装置の構成を示している。図1に示されている分注装置(細胞培養装置)100は、液体を分注するためのシリンジ1、及びシリンジ1より相対的に下方にあって、分注対象物である液体を入れるディッシュ5を装着可能なディッシュ装着部22を含み、さらにシリンジ1やディッシュ装着部22を移動させる駆動部8を含んで構成されている。駆動部8は、シリンジ1を移動させるシリンジ駆動部3、およびディッシュ装着部22を移動させるディッシュ駆動部4を含んで構成される。
【0015】
シリンジ1は、液体を吐出するノズル11を備えている。
ディッシュ5は、例えば円形の底面及び底面の周囲を囲む側面を有して形成される例えば樹脂製の細胞培養容器である。
液体は、例えば、ディッシュ5内で細胞を培養するための培地、用途に応じて例えばトリプシンやPBS(Phosphate buffered saline)などとすることができる。
ディッシュ装着部22は、円形のディッシュ5に合せて円形の平らなディッシュ装着面23を持ち、ディッシュ5を装着したときディッシュ5の内底面中心とディッシュ装着面23の中心が一致するとともに、容易には位置ずれが起きないようにする位置決め手段24を備えている。
【0016】
シリンジ駆動部3は、シリンジ1の位置や姿勢を制御することができる。そしてこれにより、シリンジ1のノズル11から吐出される液体の吐出方向を制御することができる。
ディッシュ駆動部4は、ディッシュ装着部22の位置や姿勢、さらに回転などを制御することができる。
そして、シリンジ駆動部3およびディッシュ駆動部4の制御によって、シリンジ1のノズル11とディッシュ5との相対位置が制御され、液体をディッシュ5に分注する位置にシリンジ1のノズル11を相対的に移動させることができる。
【0017】
===分注装置の構成===
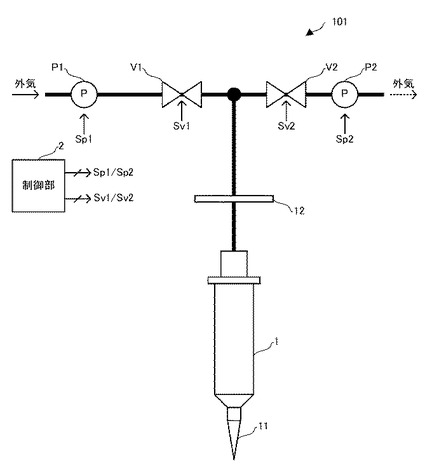
図2を参照して、本発明の一実施形態における分注装置100が有する分注機構101の構成について説明する。
図2に示されている分注機構101は、シリンジ1、制御部2、フィルタ12、ポンプP1、P2、およびバルブV1、V2を含んで構成されている。また、制御部2は、各ポンプおよび各バルブを制御するための制御信号Sp1、Sp2、およびSv1、Sv2を出力している。
【0018】
ポンプP1は、外気をシリンジ1内に導入して、ノズル11を介してシリンジ1内の液体を吐出する圧力を発生させる吐出用ポンプである。また、ポンプP2は、シリンジ1内の気体(空気)を排出して、ノズル11を介してシリンジ1内に液体を吸引する圧力(負圧)を発生させる吸引用ポンプである。
【0019】
バルブV1は、シリンジ1とポンプP1との間の流路(第1の流路)を開閉するように接続されている。またバルブV2は、シリンジ1とポンプP2との間の流路(第2の流路)を開閉するように接続されている。なお、各バルブとして、例えば、制御信号によって制御可能なソレノイドバルブ(電磁弁)や電動ピンチバルブなどを用いることができる。
【0020】
第1、第2の各流路は、1点で合流・分岐しており、当該合流・分岐点とシリンジ1との間の流路には、雑菌などの混入によってシリンジ1内の液体が汚染されるのを防止するため、例えばメンブレンフィルタなどのフィルタ12が挿入されている。また、ポンプP1、P2と外気との間の流路は、適宜合流・分岐していてもよい。
【0021】
===駆動部の構成===
次に、駆動部8の構成について、図3から図5を参照しながら説明する。
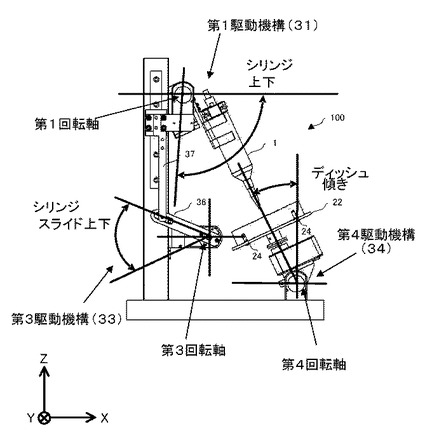
図3は、分注装置100の側面図である。図4は分注装置100の正面図である。図5は、分注装置100の上面図である。
シリンジ駆動部3は、第1駆動機構31、第2駆動機構32、第3駆動機構33を有する。またディッシュ駆動部4は、第4駆動機構34、第5駆動機構35を有する。
【0022】
第1駆動機構31は、内部に第1サーボモータ51を備え、図3に示すように、Y軸に平行な第1回転軸を中心に、シリンジ1のノズル11の向きを変えることが可能である。この第1回転軸は、また、ディッシュ装着面23に対する垂線に直交する。第1サーボモータ51を駆動することにより、シリンジ1のノズル11の向きは仰俯角方向(第1方向)に変えられる。なお説明の簡単化のために、第1サーボモータ51によってシリンジ1のノズル11の向きが変わる方向を上下方向とも記す。
【0023】
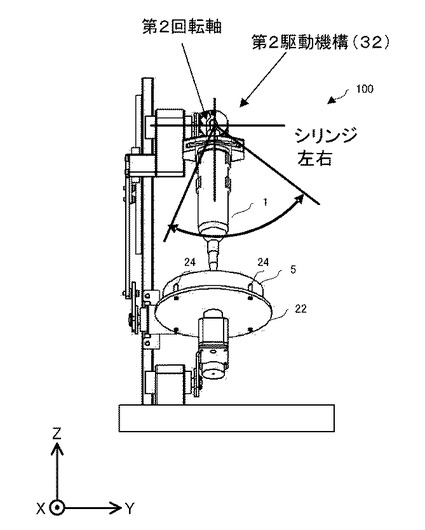
第2駆動機構32は、内部に第2サーボモータ52を備え、図4に示すように、Y軸の向きとシリンジ1のノズル11の向きとにより定まる平面内において、この平面に垂直な第2回転軸を中心に、シリンジ1のノズル11の向きを変えることが可能である。本実施形態では、第2回転軸は、ディッシュ装着面23に対する垂線に直交するとともに、第1回転軸に垂直なので、第2駆動機構32が変えるノズル11の向きは、上記仰俯角方向(第1方向)に直交する方向(第2方向)である。なお説明の簡単化のため、この仰俯角方向に直交する方向を左右方向とも記す。
【0024】
第3駆動機構33は、内部に第3サーボモータ53を備え、図3に示すように、シリンジ1全体をZ軸方向(鉛直方向)にスライド移動させることが可能である。第3駆動機構33は、図3に示すように、例えばクランク構造を有して構成され、Y軸に平行な第3回転軸を中心に第3サーボモータ53によって回転移動される第1ロッド36の先端部分に第2ロッド37の一端を接続し、第2ロッドの他端側に、上記第1駆動機構31、第2駆動機構32、及びシリンジ1を接続して構成される。
【0025】
第4駆動機構34は、内部に第4サーボモータ54を備え、図3に示すように、Y軸に平行な第4回転軸を中心にディッシュ装着部22を回転移動させることにより、ディッシュ装着部22に装着されたディッシュ5の内底面を水平状態からシリンジ1に向けて傾斜させた状態へと変えることが可能である。
【0026】
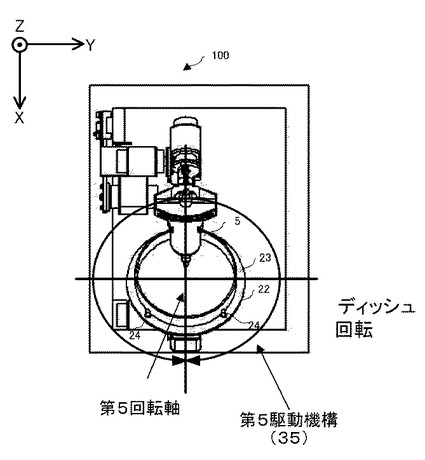
第5駆動機構35は、内部に第5サーボモータ55を備え、図5に示すように、ディッシュ装着部22のディッシュ装着面23に垂直な第5回転軸を中心に、ディッシュ装着部22を回転させることが可能である。本実施形態では、第5回転軸はディッシュ装着面23の中心を通るので、ディッシュ装着部22を第5回転軸を中心に回転させることにより、ディッシュ装着部22に装着されたディッシュ5を、ディッシュ5の底面の中心を軸として回転させることができる。第5駆動機構35は、図5に示すように、第5回転軸を中心に例えば±180°の範囲で回転駆動可能である。
【0027】
また第5駆動機構35の第5回転軸は、第2駆動機構32の第2回転軸と同一平面内において交差するように配置されている。そして、第1駆動機構31の第1回転軸と、第3駆動機構33の第3回転軸と、第4駆動機構34の第4回転軸は、いずれもこの平面に直交するように配置されている。
【0028】
そのため、第4駆動機構34によってディッシュ装着部22をシリンジ1に向けて傾斜させると共に、第1駆動機構31によってシリンジ1のノズル11の向きを上下方向に移動させることによって、シリンジ1のノズル11の向きを、ディッシュ装着部22に装着したディッシュ5の底面の中心に垂直に向けることができる。
【0029】
またシリンジ1のノズル11をディッシュ5の底面の中心に垂直に向けた際のノズル11から底面の中心に至る垂線の向きを基準に、上記第1駆動機構31をさらに駆動することによって、シリンジ1のノズル11の向きを、仰俯角方向(上下方向、第1方向)、すなわちディッシュ5の内底面と内側面とが接する領域上の対向する2点間を結ぶ第1方向に変えることができる。
【0030】
またシリンジ1のノズル11をディッシュ5の底面の中心に垂直に向けた際のノズル11から底面の中心に至る垂線の向きを基準に、上記第2駆動機構32をさらに駆動することによって、シリンジ1のノズル11の向きを、仰俯角方向に交差する方向(左右方向、第2方向)に変えることができる。
【0031】
そして、第1駆動機構31と第2駆動機構32を組み合わせることによって、シリンジ1のノズル11の向きを、ディッシュ5の内底面上の全面に亘って向けることができる。
【0032】
例えば、シリンジ1のノズル11の向きを、ディッシュ5の内底面と内側面とが接する円環状の領域内の所定位置(例えばこの円環状の領域のうち、傾斜したディッシュ5の内底面の最上部近傍の位置)に向けることができ、さらに、この円環状の領域に沿って周回するように、シリンジ1のノズル11の向きを変えることもできる。
【0033】
また、シリンジ1のノズル11の向きは、この円環状の領域に向けるのみならず、ディッシュ5の内底面上の任意の位置に向けることもできるため、例えば、ディッシュ5の内底面上の所定の経路に沿って、シリンジ1のノズル11の向きを変えることもできる。
【0034】
なお、第1〜第5駆動機構31〜35はそれぞれ、第1〜第5回転軸の回転角度を検出可能な例えばロータリポテンショメータや、原点センサとロータリーエンコーダ等による位置検出手段を有する。これにより、第1〜第5駆動機構31〜35は、シリンジ1やディッシュ装着部22の正確な位置制御を行うことができる。
【0035】
さらに、分注時のノズル先端位置は、ディッシュ5の底面に触れない位置で、且つ、分注の流量やノズル先端の移動速度などから、分注した液体の飛沫がディッシュ5の外部に飛ばない位置に設定される。
【0036】
===制御部の構成===
図6に示すように、本実施形態に係る分注装置100は、制御部2、記憶部41、サーボモータ51〜55、ポンプP1、P2、バルブV1、V2を備えている。また制御部2にはタッチパネル42やディスプレイ43が接続される。
【0037】
なおタッチパネル42やディスプレイ43は、分注装置100の構成要素として実現してもよいし、制御部2と通信可能に接続されるパソコンなどの外部制御機器を用いて実現してもよい。
【0038】
制御部2は、分注装置100の全体の動作を司る装置である。制御部2は、例えば、記憶部41に記憶されているプログラムを実行可能なマイコンによって構成される。
【0039】
記憶部41には、制御部2により実行されるプログラムや、制御部2がプログラムを実行する際に参照する制御データやテーブルなどを記憶している。
【0040】
タッチパネル42は、分注装置100のオペレータが、分注装置100に対して、動作開始や動作停止などの各種指令を入力するために使用する装置である。またオペレータは、例えば分注装置100の初期設定時や再設定時等に、タッチパネル42から、シリンジ1やディッシュ装着部22の目標位置、あるいは、第1〜第5駆動機構31〜35の各回転軸の位置情報などを入力することにより、シリンジ1の長さやディッシュ5のサイズ等に合わせて、正確な分注操作が行われるようにすることができる。
【0041】
ディスプレイ43は、分注装置100のオペレータに対して、分注装置100の制御状態や各種警報などを出力するための装置である。
【0042】
制御部2は、タッチパネル42から入力された指令に基づいて、記憶部41に記憶されているプログラムを実行することによって、上記サーボモータ51〜55、ポンプP1、P2、バルブV1、V2を制御する。
【0043】
===分注装置の動作例===
次に、図7〜図10を参照して、本実施形態における分注装置100の動作について、トリプシン等の剥離剤で剥離した付着細胞や、浮遊細胞を培地を使って回収する一連の作業を例に説明する。
【0044】
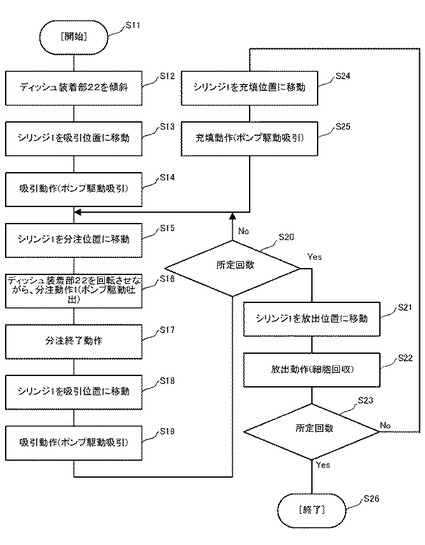
図7は、本実施形態の分注装置100を用いて、ディッシュ5から細胞を回収する際の動作の概要を示している。図8は、ディッシュ5から細胞を回収する際の分注装置100の制御フローを例示している。
【0045】
図7において、まず分注装置100は、分注装置100近傍の所定位置に設置されているリザーバ6に溜められた培地溶液などの液体をシリンジ1内に吸引(充填動作)する。そして分注装置100は、シリンジ1内の液体をディッシュ5に吐出(分注動作)する。そして分注装置100は、ディッシュ5内の細胞を含む液体をシリンジ1内に吸引(吸引動作)し、シリンジ1内の液体を、分注装置100近傍の所定位置に設置されている貯留タンク7に吐出(放出動作)する。即ち、細胞を回収する。
【0046】
なお、充填動作と吸引動作はいずれも液体をシリンジ1内に取り込む点で同じであるため、ポンプP1、P2、バルブV1、V2の動作は同じである。しかしながら、充填動作は、リザーバ6から液体をシリンジ1内に取り込む動作であるのに対し、吸引動作は、ディッシュ5から液体をシリンジ1内に取り込む動作である点で相違するため、説明の都合上、区別して記載する。
【0047】
もちろん、分注装置100は、上記動作以外にも、ディッシュ5から液体を吸引してリザーバ6に液体を吐出したり、ディッシュ5から液体を吸引してディッシュ5に液体を吐出したり、リザーバ6から液体を吸引してリザーバ6に液体を吐出したりすることもできる。また、リザーバ6から液体を吸引して貯留タンク7に液体を吐出することもできる。
【0048】
以下においては、いずれの場合も、充填動作、分注動作、吸引動作、および放出動作を行うためにシリンジ1を移動させるべき位置を、それぞれ充填位置、分注位置、吸引位置および放出位置と称することとする。
【0049】
次に、本実施形態の分注装置100が行う細胞回収の動作の例を、図8のフローチャートを用いて具体的に説明する。なお、回収する細胞が付着細胞の場合、予めトリプシン等の剥離剤によって剥離した後、血清入りの培地をディッシュ5に入れて剥離作用を停止し、細胞は培地中に浮遊しているか剥がれかけ軽く付着した状態、または、ディッシュ5の底面に沈殿、粘着した状態になっている。また、回収する細胞が浮遊細胞の場合、培地中に浮遊しているか、ディッシュ5の底面に沈殿、粘着した状態になっている。
【0050】
分注装置100は、動作が開始されると(S11)、まず、制御部2が駆動部8を駆動し、ディッシュ装着部22をシリンジ1に向けて所定角度だけ傾斜させる(S12)。具体的には、制御部2が第4サーボモータ54を駆動し、第4回転軸を中心にディッシュ装着部22を回転させる。目標回転量あるいは目標回転位置は、予め記憶部41に記憶されている。制御部2は、ロータリポテンショメータからの検出信号と記憶部41に記憶されている目標回転量あるいは目標回転位置とを比較しながら、目標角度までディッシュ装着部22を傾斜させる。
【0051】
次に、制御部2は、駆動部8を駆動し、シリンジ1のノズル11を吸引位置、即ち第2領域に向け(S13)、その後、洗い流された細胞を含む、第2領域に溜まった液体の吸引動作を行う(S14)。
【0052】
制御部2は、シリンジ1を第2領域に向けるために、第1〜第3サーボモータ51〜53を駆動し、第1〜第3回転軸を中心に第1〜第3駆動機構31〜33の構成要素をそれぞれ所定角度だけ回転させる。シリンジ1を第2領域に向けるためのそれぞれの目標回転量あるいは目標回転位置は、予め記憶部41に記憶されている。制御部2は、ロータリポテンショメータからの検出信号と記憶部41に記憶されている目標回転量あるいは目標回転位置とを比較しながら、シリンジ1を第2領域に向ける。
【0053】
本分注装置100では、シリンジ1のノズル11をディッシュ5の底面に垂直に向けた際のノズル11から底面に至る垂線の向きを基準に、ノズル11の向きを第1方向及び第2方向に変えることができ、それによりノズル11を第2領域に向けることができる。そして、図10(A)に示すように、ディッシュ5の内底面及び内側面のそれぞれに対して所定の角度を持って、シリンジ1のノズル11をディッシュ5の底面及び側面と干渉させることなく、第2領域に向けることができる。
【0054】
こうして本分注装置100では、傾斜したディッシュ5の第2領域に貯留している液体を、吸引することが可能となる。
【0055】
また本分注装置100は、ノズル11を第2領域に向ける際に、第3駆動機構33を駆動することによって、シリンジ1を鉛直下向に移動させるようにしている。このため、傾斜したディッシュ5の第2領域に溜まった液中、最も深い所にノズル11の先端を配置させることができるので、第2領域に流下した液体を残留させることなく回収することができる。
【0056】
吸引動作では、制御部2の制御によって、ポンプP1を停止し、バルブV1を閉じた状態で、ポンプP2を駆動するとともにバルブV2を開いて、ポンプP2が発生させる圧力(負圧)によって、ディッシュ5の第2領域に貯留している液体を、シリンジ1のノズル11から吸引する(ポンプ駆動吸引)。
【0057】
次に、分注装置100は、制御部2が駆動部8を駆動し、シリンジ1のノズル11の向きをディッシュ5の底面に垂直に向けた際のノズル11から底面に至る垂線の向きを基準に、ノズル11を分注位置に向けて(S15)、分注動作を行う(S16)。
【0058】
分注位置は、例えば、傾斜したディッシュ5の内底面と内側面とが接する円環状の領域内の所定位置である。
【0059】
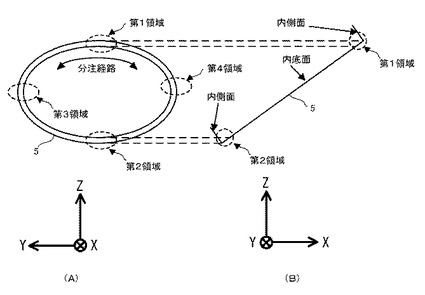
分注位置について、図9、図10を参照しながら説明する。図9(A)は、傾斜したディッシュ装着部22に装着されたディッシュ5を、X軸方向の負から正の向きに見た場合の分注位置を例示する図である。また図9(B)は、傾斜したディッシュ装着部22に装着されたディッシュ5を、Y軸方向の負から正の向きに見た場合の分注位置を例示する図である。
【0060】
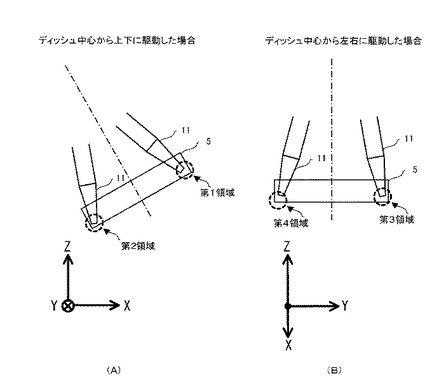
また図10(A)は、傾斜したディッシュ装着部22に装着されたディッシュ5を、Y軸方向の負から正の向きに見た場合の図であり、分注位置が第1領域の場合、第2領域の場合のそれぞれのノズル11の向きを示す図である。図10(B)は、傾斜したディッシュ装着部22に装着されたディッシュ5を、ディッシュ5の底面に平行な向きから見た場合の図であり、分注位置が第3領域の場合、第4領域の場合のそれぞれのノズル11の向きを示す図である。
【0061】
本例の分注動作を行う場合の分注位置は、図9(A)に示す、傾斜したディッシュ5の内底面と内側面とが接する円環状の領域のうち最上部近傍の第1領域である。
【0062】
制御部2は、シリンジ1を第1領域に向けるために、第1〜第3サーボモータ51〜53を駆動し、第1〜第3回転軸を中心に第1〜第3駆動機構31〜33の構成要素をそれぞれ所定角度だけ回転させる。それぞれの目標回転量あるいは目標回転位置は、予め記憶部41に記憶されている。制御部2は、ロータリポテンショメータからの検出信号と記憶部41に記憶されている目標回転量あるいは目標回転位置とを比較しながら、シリンジ1を第1領域に向ける。
【0063】
本分注装置100では、シリンジ1のノズル11をディッシュ5の底面に垂直に向けた際のノズル11から底面に至る垂線の向きを基準に、ノズル11の向きを第1方向及び第2方向に変えることによって、ノズル11を第1領域に向けることができるので、図10(A)に示すように、ディッシュ5の内底面及び内側面のそれぞれに対して所定の角度を持って、シリンジ1のノズル11をディッシュ5の底面及び側面と干渉させることなく、ノズル11を第1領域に向けることができる。
【0064】
図8に戻って、分注動作(S16)では、制御部2の制御によって、ポンプP2を停止し、バルブV2を閉じた状態のまま、ポンプP1を駆動するとともにバルブV1を開いて、ポンプP1が発生させる圧力によってシリンジ1内の液体を吐出させる(ポンプ駆動吐出)。
【0065】
なお、分注動作の際にシリンジ1から吐出される液体の量は、予めポンプの駆動時間と吐出量の関係が規定されている。記憶部41には、この関係を示すデータが記憶されており、制御部2は、シリンジ1から所定量の液体が吐出されるように、バルブV1、V2やポンプP1、P2を制御する。
【0066】
このように、本分注装置100では、シリンジ1のノズル11から圧力を持って吐出される液体を、ディッシュ5の上記第1領域に向けて直接掛けることが可能となる。第1領域に向けて直接吐出された液体は、ディッシュ5の内底面上を広がりながら流下する。これにより、ディッシュ5の内底面上に軽く付着または粘着している細胞を、効果的に洗い流すことが可能となる。
【0067】
さらに本実施形態の分注装置100は、分注動作を実行する際に、制御部2が駆動部8を駆動し、ディッシュ装着部22を、ディッシュ5の底面の中心を通り、この底面に垂直な回転軸を中心にディッシュ装着部22を回転させる。
【0068】
このようにすることにより、ディッシュ5を回転させながら液体を吐出することができるので、シリンジ1のノズル11から圧力をもって第1領域に吐出された液体を、ディッシュ5の内底面の周囲に渡って直接掛けることが可能となる。そしてこれにより、ディッシュ5の内底面上に軽く付着または粘着している細胞を、より効果的に流すことが可能となる。
【0069】
制御部2は、シリンジ1から所定量の液体が吐出されると、ディッシュ装着部22の上記回転を停止すると共に、シリンジ1からの液体の吐出を停止する。
【0070】
そして分注装置100は、分注終了動作を行う(S17)。分注終了動作では、例えばシリンジ1のノズル11から液滴や泡が垂れるのを防止するため、制御部2が駆動部8を駆動することによって、例えばノズル11の先端をディッシュ5の内側面に接触させ、ノズル11の先端の液滴や泡を除去する。
【0071】
この分注終了動作が完了すると、シリンジ1から吐出された所定量の液体は、図9に示す、ディッシュ5の第2領域に貯留している。この第2領域は、傾斜したディッシュ装着部22に装着されたディッシュ5の内底面と内側面とが接する領域のうち最下部近傍の領域である。
【0072】
次に、制御部2は、シリンジ1からの液体の吐出を停止している間に、駆動部8を駆動し、シリンジ1のノズル11を第2領域に向け(S18)、その後、洗い流された細胞を含む、第2領域に溜まった液体の吸引動作を行う(S19)。
【0073】
制御部2は、シリンジ1を第2領域に向けるために、第1〜第3サーボモータ51〜53を駆動し、第1〜第3回転軸を中心に第1〜第3駆動機構31〜33の構成要素をそれぞれ所定角度だけ回転させる。シリンジ1を第2領域に向けるためのそれぞれの目標回転量あるいは目標回転位置は、予め記憶部41に記憶されている。制御部2は、ロータリポテンショメータからの検出信号と記憶部41に記憶されている目標回転量あるいは目標回転位置とを比較しながら、シリンジ1を第2領域に向ける。
【0074】
本分注装置100では、シリンジ1のノズル11をディッシュ5の底面に垂直に向けた際のノズル11から底面に至る垂線の向きを基準に、ノズル11の向きを第1方向及び第2方向に変えることによって、ノズル11を第2領域に向けることができるので、図10(A)に示すように、ディッシュ5の内底面及び内側面のそれぞれに対して所定の角度を持って、シリンジ1のノズル11をディッシュ5の底面及び側面と干渉させることなく、ノズル11を第2領域に向けることができる。
【0075】
こうして本分注装置100では、傾斜したディッシュ5の第2領域に貯留している液体を、吸引することが可能となる。
【0076】
また本分注装置100は、ノズル11を第2領域に向ける際に、第3駆動機構33を駆動することによって、シリンジ1を鉛直下向に移動させるようにしている。このため、傾斜したディッシュ5の第2領域に溜まった液中、最も深い所にノズル11の先端を配置させることができるので、第2領域に流下した液体を残留させることなく回収することができる。
【0077】
吸引動作では、制御部2の制御によって、ポンプP1を停止し、バルブV1を閉じた状態で、ポンプP2を駆動するとともにバルブV2を開いて、ポンプP2が発生させる圧力(負圧)によって、ディッシュ5の第2領域に貯留している液体を、シリンジ1のノズル11から吸引する(ポンプ駆動吸引)。
【0078】
分注装置100は、上記S15からS19までの処理を所定回数だけ、本例では3回乃至5回実行する(S20)。所定回数が2回以上に設定されている場合には、分注装置100は、S15からS19の処理回数が所定回数になるまで、上記S15からS19までの処理を実行する。S15からS19までの処理を複数回実行することにより、ディッシュ5の内底面に軽く付着または粘着した細胞を回収するような場合、細胞をより多くより確実に回収することが可能となる。
【0079】
分注装置100は、S15からS19までの処理を所定回数だけ実行すると(S20;Yes)、制御部2が駆動部8を駆動し、シリンジ1を放出位置に移動させ(S21)、最後に吸引した液体を貯留タンク7に分注する放出動作を行う(S22)。即ち、吸引した細胞をタンクに回収する。
【0080】
放出位置は、所定位置に設置されている貯留タンク7の内部にシリンジ1のノズル11から液体が吐出される位置である。
【0081】
制御部2は、シリンジ1を放出位置に移動させるために、第1〜第3サーボモータ51〜53を駆動し、第1〜第3回転軸を中心に第1〜第3駆動機構31〜33の構成要素をそれぞれ所定角度だけ回転させる。シリンジ1を放出位置に移動させるためのそれぞれの目標回転量あるいは目標回転位置は、予め記憶部41に記憶されている。制御部2は、ロータリポテンショメータからの検出信号と記憶部41に記憶されている目標回転量あるいは目標回転位置とを比較しながら、放出位置までシリンジ1を移動させる。
【0082】
放出動作では、分注動作と同様に、制御部2の制御によってポンプ駆動吐出を行い、ポンプP1が発生させる圧力によって、ディッシュ5の第2領域からシリンジ1内に吸引した細胞を含む液体を貯留タンク7に吐出させる(ポンプ駆動吐出)。
【0083】
なお、放出動作は、例えば、十分な深さの貯留タンク7にノズル11を深く挿入し、ノズル11の先端を貯留タンク7の内壁に接触させながら行うなど、ポンプ駆動吐出を行っても周囲が汚染されないような対策を行うことがより望ましい。
【0084】
そして、制御部2は、S21、S22の放出動作、即ち回収処理を所定回数だけ、本例では2回乃至3回実行したか判定し(S23)、所定回数に達したならば一連のシーケンスを終了する(S26)。
【0085】
他方、所定回数に達していなければ(S23;No)、制御部2は駆動部8を駆動し、シリンジ1を充填位置(図7において、シリンジ1のノズル11がリザーバ6内の液中になる位置)に移動させ(S24)、充填動作を行う(S25)。
【0086】
充填動作では、制御部2の制御によって、ポンプP1を停止し、バルブV1を閉じた状態で、ポンプP2を駆動するとともにバルブV2を開いて、ポンプP2が発生させる圧力(負圧)によってシリンジ1内に新しい液体(例えば、培地)を吸引させる(ポンプ駆動吸引)。所定量を吸引させたらポンプP2を停止し、バルブV2を閉じる。
【0087】
そして、ステップS15に復帰し、制御部2は再びS15からS19までの処理を所定の回数実行する。この場合、リザーバ6から充填した新しい新鮮な例えば培地を用いて掛け流し(分注)と吸引を繰り返すものである。このように、元の培地による掛け流しと吸引に加えて、新しい培地による掛け流しと吸引も更に実行することで、より確実に細胞を回収できるようになる。本実施形態では(S20の所定回数)×(S23の所定回数)回に亘って処理を繰り返すことになる。
【0088】
以上、本実施形態の分注装置100によれば、ディッシュ5の内底面の周縁部分を含むあらゆる領域に対して、シリンジ1のノズル11から吐出された液体を直接掛けることが可能になる。
【0089】
これにより、例えばディッシュ5から細胞を回収する処理において、ディッシュ5の底に軽く付着または粘着した細胞をより多く洗い流すことができて、細胞の回収効率を向上させることができる。また、トリプシンなどの剥離剤によって剥がれかけた細胞や、ディッシュ底面に沈殿、粘着した細胞など、流下する液体の流れや、短時間の分注だけでは回収が困難であった細胞に対しても、細胞を流すのに十分な量の液体を所定時間、所定流量で直接掛けることができるので、回収率が向上する。
【0090】
一例として、通常100mmディッシュと呼ばれる一般的なサイズのディッシュの場合を考える。100mmディッシュの内底部の直径は90[mm]程度である。
【0091】
これまでの装置で吐出液を直接掛けることができなかった領域は、内底部の周囲5[mm]程度のリング状の領域であると推定すると、これまでの装置では、40[mm]×40[mm]×3.14=5024.0[mm2]の面積にしか、吐出液を直接掛けることができなかったことになる。
【0092】
本分注装置100では、内底面全面に亘って直接吐出液を掛けることができるので、45[mm]×45[mm]×3.14=6358.5[mm2] の面積に吐出液を直接かけることが可能になる。
【0093】
上記各面積を比較すると、6358.5[mm2]/ 5024.0[mm2]=1.27であるから、約27[%]もの効率向上が実現できることになる。
【0094】
本実施形態に係る分注装置100は、図9、図10に示すように、シリンジ1のノズル11から液体を吐出する際に、傾斜したディッシュ5の内底面と内側面とが接する円環状の領域内の最上部近傍の領域(第1領域)にシリンジ1のノズル11を向けるようにしている。これにより、シリンジ1のノズル11から上記第1領域に向けて直接吐出された液体が、ディッシュ5の内底面上を広がりながら流下するので、ディッシュ5の内底面上に軽く付着または粘着している細胞を効果的に回収することが可能となる。
【0095】
またシリンジ1のノズル11から液体を吐出する際には、ディッシュ5の底面の中心を通り、この底面に垂直な回転軸を中心にディッシュ装着部22を回転させるようにすることもできる。このようにすることにより、ディッシュ5を回転させながら液体を吐出することができるので、シリンジ1のノズル11から上記第1領域に吐出された液体を、ディッシュ5の内底面の周囲に渡って直接掛けることが可能となる。またこの場合、ノズル11から吐出された液体の水流と、ディッシュ5の回転速度との相乗効果により、ディッシュ5の内底面上での液体の流速が上昇し、ディッシュ5に軽く付着または粘着している細胞を、より効果的に回収することが可能となる。
【0096】
またディッシュ装着部22を回転させる場合には、ディッシュ装着部22を、例えば同一方向に1周以上させるようにしてもよい。このようにすることにより、ディッシュ5の上記円環状の領域の全周に亘り、液体を直接掛けることが可能となる。
【0097】
あるいは、ディッシュ装着部22を回転させる場合には、ディッシュ装着部22を、交互に逆回転させるようにしてもよい。例えば、ディッシュ装着部22を1周毎に逆回転させるようにしてもよいし、半周毎に逆回転させるようにしても良い。このようにしても、ディッシュ5の上記円環状の領域の全周に亘り、液体を直接掛けることが可能となる。また特に、回転の向きを変えることにより、ノズル11から吐出された液体がディッシュ5に降り注ぐ際に、回転方向によって異なる向きから降り注ぐようにできるので、ディッシュ5に軽く付着または粘着している細胞の回収効果をより向上させることが可能となる。
【0098】
またシリンジ1のノズル11から液体を吐出する際には、ノズル11の向きを、傾斜したディッシュ5の内底面と内側面とが接する円環状の領域内の最上部近傍の領域(第1領域)から最下部近傍の領域(第2領域)に移動させるようにしても良い。これにより、シリンジ1のノズル11から上記第1領域に向けて直接吐出された液体が、ディッシュ5の内底面上を広がりながら流下すると共に、ノズル11が第2領域に向けて移動することにより、移動経路上の領域に対しても液体を直接掛けることができる。さらにこの場合、ノズル11の向きを、傾斜したディッシュ5の内底面と内側面とが接する円環状の領域内において水平方向に向かい合う2つの領域(第3領域と第4領域)とを結ぶ方向にも移動させるように組み合わせても良い。
【0099】
またシリンジ1のノズル11から液体を吐出する際には、ノズル11の向きを、左右方向(第2方向)に交互に変えながら、上下方向に移動させ、ディッシュ5内底面全面を走査するように移動させても良い。これにより、シリンジ1のノズル11から吐出された液体が、ディッシュ5の内底面上を広がりながら流下すると共に、ノズル11の移動経路上の広範囲な領域に対しても液体を直接掛けることができる。なおこの場合、ディッシュ装着部22を固定した上で、ノズル11の向きを移動させても良い。このようにすれば、ディッシュ装着部22を回転させなくても良いので、例えば第5駆動機構35を省くことも可能となる。
【0100】
またさらに、例えば、分注動作を行う際に、シリンジ1のノズル11を、最初に図9(A)に示す第2領域(傾斜したディッシュ5の内底面と内側面とが接する円環状の領域内の最下部近傍の領域)に向け、ディッシュ5の内底面と内側面とが接する円環状の領域内に沿って周回させるようにしても良い。このようにすれば、ディッシュ装着部22を回転させなくても良いので、例えば第5駆動機構35を省くことも可能となる。
【0101】
上記実施形態は、本発明の理解を容易にするためのものであり、本発明を限定して解釈するためのものではない。本発明は、その趣旨を逸脱することなく、変更、改良され得るとともに、本発明にはその等価物も含まれる。
【符号の説明】
【0102】
1 シリンジ
2 制御部
3 シリンジ駆動部
4 ディッシュ駆動部
5 ディッシュ(培養皿)
6 リザーバ
7 貯留タンク
8 駆動部
11 ノズル
12 フィルタ
22 ディッシュ装着部
31 第1駆動機構
32 第2駆動機構
33 第3駆動機構
34 第4駆動機構
35 第5駆動機構
36 第1ロッド
37 第2ロッド
41 記憶部
42 タッチパネル
43 ディスプレイ
51 第1サーボモータ
52 第2サーボモータ
53 第3サーボモータ
54 第4サーボモータ
55 第5サーボモータ
100 分注装置
101 分注機構
P1、P2 ポンプ
V1、V2 バルブ
【技術分野】
【0001】
本発明は、分注装置に関する。
【背景技術】
【0002】
シリンジなどを用いてノズルから液体を吐出する分注装置は、様々な用途に用いられている。
【0003】
例えば、特許文献1では、ディッシュ(培養容器)に対するピペッティング操作に用いられる分注装置(ピペット装置)を備えた自動細胞培養装置が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−291103号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ここで、例えばディッシュ内で細胞を培養する場合や、細胞を継代する場合などには、ディッシュ内の培地を新しい培地に交換する作業や、細胞の培養完了後にディッシュから培地を回収する作業、細胞を回収する作業、単離細胞にする作業、コロニーを所定のサイズに調整する作業などが行われるが、このような作業を行う際には、古い培地や試薬、細胞懸濁液を効率良く回収するとともに、新しい培地や試薬を細胞培養面全面に亘って速やかに行き渡らせる等の配慮が求められる。
【0006】
ところが、例えば図11に示すように、これまでの分注装置では、ディッシュの内底面の周囲部分には、シリンジのノズルから吐出した液体を直接掛けることができない領域が生じていた。そのため、吐出した液体を直接掛けることができない領域には細胞が残ってしまう問題があった。また、トリプシンなどの剥離剤によって剥がれかけ軽く付着した細胞や、ディッシュ底面に沈殿、粘着した細胞などは、液体を所定時間、所定流量で直接掛けることができないと回収できない問題があった。
【0007】
図11(A)のように、ディッシュを傾斜させてノズルから液体を吐出する場合に、ディッシュの内底面の周囲の領域のうち最上部近傍の領域(R1で示す領域)には、シリンジのノズルが鉛直方向に向いているため、傾斜させたディッシュの側面とノズルとが干渉することにより、ノズルから吐出した液体を直接掛けることができない。またディッシュの内底面の周囲の領域のうち最下部近傍の領域(R2で示す領域)には、ノズルから吐出した液体が直ちに貯留してしまうため、ノズルから吐出した液体を直接掛けることができない。
【0008】
また図11(B)のように、ディッシュを傾斜させてノズルから液体を吐出する場合に、ディッシュの内底面の周囲の領域のうち最上部及び最下部の中間付近の領域(R3、R4で示す領域)には、領域R1と同様に、シリンジのノズルが鉛直方向に向いているため、ディッシュの側面とノズルとが干渉することにより、ノズルから吐出した液体を直接掛けることができない。
【0009】
本発明は上記課題を鑑みてなされたものであり、ディッシュの内底面の周囲部分を含む領域に対して、シリンジのノズルから吐出した液体を所定時間、所定流量で直接掛けることが可能な分注装置を提供することを一つの目的とする。
【課題を解決するための手段】
【0010】
上記目的を達成するため、本発明の一つの側面に係る分注装置は、底面及び前記底面を囲む側面を有して形成されるディッシュが装着されるディッシュ装着部と、液体を吐出するノズルを有するシリンジと、前記ディッシュ装着部を前記シリンジに向けて傾斜させると共に、前記シリンジのノズルを前記ディッシュの内底面に垂直に向けた際の前記ノズルから前記内底面に至る垂線の向きを基準に、前記シリンジのノズルの向きを、前記ディッシュの内底面と内側面とが接する領域上において向かい合う2つの位置を結ぶ第1方向と、前記第1方向に交差する第2方向とにそれぞれ変える駆動部と、前記シリンジのノズルから液体を吐出させる制御部と、を備える。
【発明の効果】
【0011】
ディッシュの内底面の周囲部分を含む領域に対して、シリンジのノズルから吐出した液体を所定時間、所定流量で直接掛けることが可能な分注装置を提供する。
【図面の簡単な説明】
【0012】
【図1】本発明の一実施形態における分注装置の全体構成図である。
【図2】本発明の一実施形態における分注装置が有する分注機構の構成を示すブロック図である。
【図3】本発明の一実施形態における第1駆動機構、第3駆動機構、第4駆動機構を示す図である。
【図4】本発明の一実施形態における第2駆動機構を示す図である。
【図5】本発明の一実施形態における第5駆動機構を示す図である。
【図6】本発明の一実施形態における制御部を示すブロック図である。
【図7】本発明の一実施形態における分注装置を用いた液体の充填、分注、吸引、放出動作の一例を説明する図である。
【図8】本発明の一実施形態における分注装置の制御の流れを説明するフローチャートである。
【図9】本発明の一実施形態における分注装置の制御を説明するための図である。
【図10】本発明の一実施形態における分注装置の制御を説明するための図である。
【図11】シリンジのノズルからディッシュに吐出した液体が直接掛からない領域を説明するための図である。
【発明を実施するための形態】
【0013】
本明細書および添付図面の記載により、少なくとも以下の事項が明らかとなる。
【0014】
===分注装置の構成===
図1を参照して、本発明の一実施形態における分注装置100の構成について説明する。
図1は、本実施形態の分注機構101を備えた分注装置100の適用例として、細胞培養装置の構成を示している。図1に示されている分注装置(細胞培養装置)100は、液体を分注するためのシリンジ1、及びシリンジ1より相対的に下方にあって、分注対象物である液体を入れるディッシュ5を装着可能なディッシュ装着部22を含み、さらにシリンジ1やディッシュ装着部22を移動させる駆動部8を含んで構成されている。駆動部8は、シリンジ1を移動させるシリンジ駆動部3、およびディッシュ装着部22を移動させるディッシュ駆動部4を含んで構成される。
【0015】
シリンジ1は、液体を吐出するノズル11を備えている。
ディッシュ5は、例えば円形の底面及び底面の周囲を囲む側面を有して形成される例えば樹脂製の細胞培養容器である。
液体は、例えば、ディッシュ5内で細胞を培養するための培地、用途に応じて例えばトリプシンやPBS(Phosphate buffered saline)などとすることができる。
ディッシュ装着部22は、円形のディッシュ5に合せて円形の平らなディッシュ装着面23を持ち、ディッシュ5を装着したときディッシュ5の内底面中心とディッシュ装着面23の中心が一致するとともに、容易には位置ずれが起きないようにする位置決め手段24を備えている。
【0016】
シリンジ駆動部3は、シリンジ1の位置や姿勢を制御することができる。そしてこれにより、シリンジ1のノズル11から吐出される液体の吐出方向を制御することができる。
ディッシュ駆動部4は、ディッシュ装着部22の位置や姿勢、さらに回転などを制御することができる。
そして、シリンジ駆動部3およびディッシュ駆動部4の制御によって、シリンジ1のノズル11とディッシュ5との相対位置が制御され、液体をディッシュ5に分注する位置にシリンジ1のノズル11を相対的に移動させることができる。
【0017】
===分注装置の構成===
図2を参照して、本発明の一実施形態における分注装置100が有する分注機構101の構成について説明する。
図2に示されている分注機構101は、シリンジ1、制御部2、フィルタ12、ポンプP1、P2、およびバルブV1、V2を含んで構成されている。また、制御部2は、各ポンプおよび各バルブを制御するための制御信号Sp1、Sp2、およびSv1、Sv2を出力している。
【0018】
ポンプP1は、外気をシリンジ1内に導入して、ノズル11を介してシリンジ1内の液体を吐出する圧力を発生させる吐出用ポンプである。また、ポンプP2は、シリンジ1内の気体(空気)を排出して、ノズル11を介してシリンジ1内に液体を吸引する圧力(負圧)を発生させる吸引用ポンプである。
【0019】
バルブV1は、シリンジ1とポンプP1との間の流路(第1の流路)を開閉するように接続されている。またバルブV2は、シリンジ1とポンプP2との間の流路(第2の流路)を開閉するように接続されている。なお、各バルブとして、例えば、制御信号によって制御可能なソレノイドバルブ(電磁弁)や電動ピンチバルブなどを用いることができる。
【0020】
第1、第2の各流路は、1点で合流・分岐しており、当該合流・分岐点とシリンジ1との間の流路には、雑菌などの混入によってシリンジ1内の液体が汚染されるのを防止するため、例えばメンブレンフィルタなどのフィルタ12が挿入されている。また、ポンプP1、P2と外気との間の流路は、適宜合流・分岐していてもよい。
【0021】
===駆動部の構成===
次に、駆動部8の構成について、図3から図5を参照しながら説明する。
図3は、分注装置100の側面図である。図4は分注装置100の正面図である。図5は、分注装置100の上面図である。
シリンジ駆動部3は、第1駆動機構31、第2駆動機構32、第3駆動機構33を有する。またディッシュ駆動部4は、第4駆動機構34、第5駆動機構35を有する。
【0022】
第1駆動機構31は、内部に第1サーボモータ51を備え、図3に示すように、Y軸に平行な第1回転軸を中心に、シリンジ1のノズル11の向きを変えることが可能である。この第1回転軸は、また、ディッシュ装着面23に対する垂線に直交する。第1サーボモータ51を駆動することにより、シリンジ1のノズル11の向きは仰俯角方向(第1方向)に変えられる。なお説明の簡単化のために、第1サーボモータ51によってシリンジ1のノズル11の向きが変わる方向を上下方向とも記す。
【0023】
第2駆動機構32は、内部に第2サーボモータ52を備え、図4に示すように、Y軸の向きとシリンジ1のノズル11の向きとにより定まる平面内において、この平面に垂直な第2回転軸を中心に、シリンジ1のノズル11の向きを変えることが可能である。本実施形態では、第2回転軸は、ディッシュ装着面23に対する垂線に直交するとともに、第1回転軸に垂直なので、第2駆動機構32が変えるノズル11の向きは、上記仰俯角方向(第1方向)に直交する方向(第2方向)である。なお説明の簡単化のため、この仰俯角方向に直交する方向を左右方向とも記す。
【0024】
第3駆動機構33は、内部に第3サーボモータ53を備え、図3に示すように、シリンジ1全体をZ軸方向(鉛直方向)にスライド移動させることが可能である。第3駆動機構33は、図3に示すように、例えばクランク構造を有して構成され、Y軸に平行な第3回転軸を中心に第3サーボモータ53によって回転移動される第1ロッド36の先端部分に第2ロッド37の一端を接続し、第2ロッドの他端側に、上記第1駆動機構31、第2駆動機構32、及びシリンジ1を接続して構成される。
【0025】
第4駆動機構34は、内部に第4サーボモータ54を備え、図3に示すように、Y軸に平行な第4回転軸を中心にディッシュ装着部22を回転移動させることにより、ディッシュ装着部22に装着されたディッシュ5の内底面を水平状態からシリンジ1に向けて傾斜させた状態へと変えることが可能である。
【0026】
第5駆動機構35は、内部に第5サーボモータ55を備え、図5に示すように、ディッシュ装着部22のディッシュ装着面23に垂直な第5回転軸を中心に、ディッシュ装着部22を回転させることが可能である。本実施形態では、第5回転軸はディッシュ装着面23の中心を通るので、ディッシュ装着部22を第5回転軸を中心に回転させることにより、ディッシュ装着部22に装着されたディッシュ5を、ディッシュ5の底面の中心を軸として回転させることができる。第5駆動機構35は、図5に示すように、第5回転軸を中心に例えば±180°の範囲で回転駆動可能である。
【0027】
また第5駆動機構35の第5回転軸は、第2駆動機構32の第2回転軸と同一平面内において交差するように配置されている。そして、第1駆動機構31の第1回転軸と、第3駆動機構33の第3回転軸と、第4駆動機構34の第4回転軸は、いずれもこの平面に直交するように配置されている。
【0028】
そのため、第4駆動機構34によってディッシュ装着部22をシリンジ1に向けて傾斜させると共に、第1駆動機構31によってシリンジ1のノズル11の向きを上下方向に移動させることによって、シリンジ1のノズル11の向きを、ディッシュ装着部22に装着したディッシュ5の底面の中心に垂直に向けることができる。
【0029】
またシリンジ1のノズル11をディッシュ5の底面の中心に垂直に向けた際のノズル11から底面の中心に至る垂線の向きを基準に、上記第1駆動機構31をさらに駆動することによって、シリンジ1のノズル11の向きを、仰俯角方向(上下方向、第1方向)、すなわちディッシュ5の内底面と内側面とが接する領域上の対向する2点間を結ぶ第1方向に変えることができる。
【0030】
またシリンジ1のノズル11をディッシュ5の底面の中心に垂直に向けた際のノズル11から底面の中心に至る垂線の向きを基準に、上記第2駆動機構32をさらに駆動することによって、シリンジ1のノズル11の向きを、仰俯角方向に交差する方向(左右方向、第2方向)に変えることができる。
【0031】
そして、第1駆動機構31と第2駆動機構32を組み合わせることによって、シリンジ1のノズル11の向きを、ディッシュ5の内底面上の全面に亘って向けることができる。
【0032】
例えば、シリンジ1のノズル11の向きを、ディッシュ5の内底面と内側面とが接する円環状の領域内の所定位置(例えばこの円環状の領域のうち、傾斜したディッシュ5の内底面の最上部近傍の位置)に向けることができ、さらに、この円環状の領域に沿って周回するように、シリンジ1のノズル11の向きを変えることもできる。
【0033】
また、シリンジ1のノズル11の向きは、この円環状の領域に向けるのみならず、ディッシュ5の内底面上の任意の位置に向けることもできるため、例えば、ディッシュ5の内底面上の所定の経路に沿って、シリンジ1のノズル11の向きを変えることもできる。
【0034】
なお、第1〜第5駆動機構31〜35はそれぞれ、第1〜第5回転軸の回転角度を検出可能な例えばロータリポテンショメータや、原点センサとロータリーエンコーダ等による位置検出手段を有する。これにより、第1〜第5駆動機構31〜35は、シリンジ1やディッシュ装着部22の正確な位置制御を行うことができる。
【0035】
さらに、分注時のノズル先端位置は、ディッシュ5の底面に触れない位置で、且つ、分注の流量やノズル先端の移動速度などから、分注した液体の飛沫がディッシュ5の外部に飛ばない位置に設定される。
【0036】
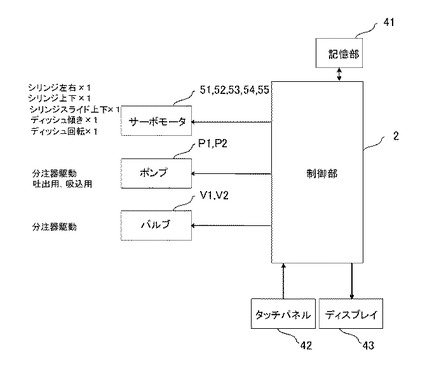
===制御部の構成===
図6に示すように、本実施形態に係る分注装置100は、制御部2、記憶部41、サーボモータ51〜55、ポンプP1、P2、バルブV1、V2を備えている。また制御部2にはタッチパネル42やディスプレイ43が接続される。
【0037】
なおタッチパネル42やディスプレイ43は、分注装置100の構成要素として実現してもよいし、制御部2と通信可能に接続されるパソコンなどの外部制御機器を用いて実現してもよい。
【0038】
制御部2は、分注装置100の全体の動作を司る装置である。制御部2は、例えば、記憶部41に記憶されているプログラムを実行可能なマイコンによって構成される。
【0039】
記憶部41には、制御部2により実行されるプログラムや、制御部2がプログラムを実行する際に参照する制御データやテーブルなどを記憶している。
【0040】
タッチパネル42は、分注装置100のオペレータが、分注装置100に対して、動作開始や動作停止などの各種指令を入力するために使用する装置である。またオペレータは、例えば分注装置100の初期設定時や再設定時等に、タッチパネル42から、シリンジ1やディッシュ装着部22の目標位置、あるいは、第1〜第5駆動機構31〜35の各回転軸の位置情報などを入力することにより、シリンジ1の長さやディッシュ5のサイズ等に合わせて、正確な分注操作が行われるようにすることができる。
【0041】
ディスプレイ43は、分注装置100のオペレータに対して、分注装置100の制御状態や各種警報などを出力するための装置である。
【0042】
制御部2は、タッチパネル42から入力された指令に基づいて、記憶部41に記憶されているプログラムを実行することによって、上記サーボモータ51〜55、ポンプP1、P2、バルブV1、V2を制御する。
【0043】
===分注装置の動作例===
次に、図7〜図10を参照して、本実施形態における分注装置100の動作について、トリプシン等の剥離剤で剥離した付着細胞や、浮遊細胞を培地を使って回収する一連の作業を例に説明する。
【0044】
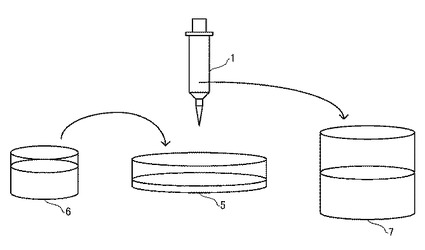
図7は、本実施形態の分注装置100を用いて、ディッシュ5から細胞を回収する際の動作の概要を示している。図8は、ディッシュ5から細胞を回収する際の分注装置100の制御フローを例示している。
【0045】
図7において、まず分注装置100は、分注装置100近傍の所定位置に設置されているリザーバ6に溜められた培地溶液などの液体をシリンジ1内に吸引(充填動作)する。そして分注装置100は、シリンジ1内の液体をディッシュ5に吐出(分注動作)する。そして分注装置100は、ディッシュ5内の細胞を含む液体をシリンジ1内に吸引(吸引動作)し、シリンジ1内の液体を、分注装置100近傍の所定位置に設置されている貯留タンク7に吐出(放出動作)する。即ち、細胞を回収する。
【0046】
なお、充填動作と吸引動作はいずれも液体をシリンジ1内に取り込む点で同じであるため、ポンプP1、P2、バルブV1、V2の動作は同じである。しかしながら、充填動作は、リザーバ6から液体をシリンジ1内に取り込む動作であるのに対し、吸引動作は、ディッシュ5から液体をシリンジ1内に取り込む動作である点で相違するため、説明の都合上、区別して記載する。
【0047】
もちろん、分注装置100は、上記動作以外にも、ディッシュ5から液体を吸引してリザーバ6に液体を吐出したり、ディッシュ5から液体を吸引してディッシュ5に液体を吐出したり、リザーバ6から液体を吸引してリザーバ6に液体を吐出したりすることもできる。また、リザーバ6から液体を吸引して貯留タンク7に液体を吐出することもできる。
【0048】
以下においては、いずれの場合も、充填動作、分注動作、吸引動作、および放出動作を行うためにシリンジ1を移動させるべき位置を、それぞれ充填位置、分注位置、吸引位置および放出位置と称することとする。
【0049】
次に、本実施形態の分注装置100が行う細胞回収の動作の例を、図8のフローチャートを用いて具体的に説明する。なお、回収する細胞が付着細胞の場合、予めトリプシン等の剥離剤によって剥離した後、血清入りの培地をディッシュ5に入れて剥離作用を停止し、細胞は培地中に浮遊しているか剥がれかけ軽く付着した状態、または、ディッシュ5の底面に沈殿、粘着した状態になっている。また、回収する細胞が浮遊細胞の場合、培地中に浮遊しているか、ディッシュ5の底面に沈殿、粘着した状態になっている。
【0050】
分注装置100は、動作が開始されると(S11)、まず、制御部2が駆動部8を駆動し、ディッシュ装着部22をシリンジ1に向けて所定角度だけ傾斜させる(S12)。具体的には、制御部2が第4サーボモータ54を駆動し、第4回転軸を中心にディッシュ装着部22を回転させる。目標回転量あるいは目標回転位置は、予め記憶部41に記憶されている。制御部2は、ロータリポテンショメータからの検出信号と記憶部41に記憶されている目標回転量あるいは目標回転位置とを比較しながら、目標角度までディッシュ装着部22を傾斜させる。
【0051】
次に、制御部2は、駆動部8を駆動し、シリンジ1のノズル11を吸引位置、即ち第2領域に向け(S13)、その後、洗い流された細胞を含む、第2領域に溜まった液体の吸引動作を行う(S14)。
【0052】
制御部2は、シリンジ1を第2領域に向けるために、第1〜第3サーボモータ51〜53を駆動し、第1〜第3回転軸を中心に第1〜第3駆動機構31〜33の構成要素をそれぞれ所定角度だけ回転させる。シリンジ1を第2領域に向けるためのそれぞれの目標回転量あるいは目標回転位置は、予め記憶部41に記憶されている。制御部2は、ロータリポテンショメータからの検出信号と記憶部41に記憶されている目標回転量あるいは目標回転位置とを比較しながら、シリンジ1を第2領域に向ける。
【0053】
本分注装置100では、シリンジ1のノズル11をディッシュ5の底面に垂直に向けた際のノズル11から底面に至る垂線の向きを基準に、ノズル11の向きを第1方向及び第2方向に変えることができ、それによりノズル11を第2領域に向けることができる。そして、図10(A)に示すように、ディッシュ5の内底面及び内側面のそれぞれに対して所定の角度を持って、シリンジ1のノズル11をディッシュ5の底面及び側面と干渉させることなく、第2領域に向けることができる。
【0054】
こうして本分注装置100では、傾斜したディッシュ5の第2領域に貯留している液体を、吸引することが可能となる。
【0055】
また本分注装置100は、ノズル11を第2領域に向ける際に、第3駆動機構33を駆動することによって、シリンジ1を鉛直下向に移動させるようにしている。このため、傾斜したディッシュ5の第2領域に溜まった液中、最も深い所にノズル11の先端を配置させることができるので、第2領域に流下した液体を残留させることなく回収することができる。
【0056】
吸引動作では、制御部2の制御によって、ポンプP1を停止し、バルブV1を閉じた状態で、ポンプP2を駆動するとともにバルブV2を開いて、ポンプP2が発生させる圧力(負圧)によって、ディッシュ5の第2領域に貯留している液体を、シリンジ1のノズル11から吸引する(ポンプ駆動吸引)。
【0057】
次に、分注装置100は、制御部2が駆動部8を駆動し、シリンジ1のノズル11の向きをディッシュ5の底面に垂直に向けた際のノズル11から底面に至る垂線の向きを基準に、ノズル11を分注位置に向けて(S15)、分注動作を行う(S16)。
【0058】
分注位置は、例えば、傾斜したディッシュ5の内底面と内側面とが接する円環状の領域内の所定位置である。
【0059】
分注位置について、図9、図10を参照しながら説明する。図9(A)は、傾斜したディッシュ装着部22に装着されたディッシュ5を、X軸方向の負から正の向きに見た場合の分注位置を例示する図である。また図9(B)は、傾斜したディッシュ装着部22に装着されたディッシュ5を、Y軸方向の負から正の向きに見た場合の分注位置を例示する図である。
【0060】
また図10(A)は、傾斜したディッシュ装着部22に装着されたディッシュ5を、Y軸方向の負から正の向きに見た場合の図であり、分注位置が第1領域の場合、第2領域の場合のそれぞれのノズル11の向きを示す図である。図10(B)は、傾斜したディッシュ装着部22に装着されたディッシュ5を、ディッシュ5の底面に平行な向きから見た場合の図であり、分注位置が第3領域の場合、第4領域の場合のそれぞれのノズル11の向きを示す図である。
【0061】
本例の分注動作を行う場合の分注位置は、図9(A)に示す、傾斜したディッシュ5の内底面と内側面とが接する円環状の領域のうち最上部近傍の第1領域である。
【0062】
制御部2は、シリンジ1を第1領域に向けるために、第1〜第3サーボモータ51〜53を駆動し、第1〜第3回転軸を中心に第1〜第3駆動機構31〜33の構成要素をそれぞれ所定角度だけ回転させる。それぞれの目標回転量あるいは目標回転位置は、予め記憶部41に記憶されている。制御部2は、ロータリポテンショメータからの検出信号と記憶部41に記憶されている目標回転量あるいは目標回転位置とを比較しながら、シリンジ1を第1領域に向ける。
【0063】
本分注装置100では、シリンジ1のノズル11をディッシュ5の底面に垂直に向けた際のノズル11から底面に至る垂線の向きを基準に、ノズル11の向きを第1方向及び第2方向に変えることによって、ノズル11を第1領域に向けることができるので、図10(A)に示すように、ディッシュ5の内底面及び内側面のそれぞれに対して所定の角度を持って、シリンジ1のノズル11をディッシュ5の底面及び側面と干渉させることなく、ノズル11を第1領域に向けることができる。
【0064】
図8に戻って、分注動作(S16)では、制御部2の制御によって、ポンプP2を停止し、バルブV2を閉じた状態のまま、ポンプP1を駆動するとともにバルブV1を開いて、ポンプP1が発生させる圧力によってシリンジ1内の液体を吐出させる(ポンプ駆動吐出)。
【0065】
なお、分注動作の際にシリンジ1から吐出される液体の量は、予めポンプの駆動時間と吐出量の関係が規定されている。記憶部41には、この関係を示すデータが記憶されており、制御部2は、シリンジ1から所定量の液体が吐出されるように、バルブV1、V2やポンプP1、P2を制御する。
【0066】
このように、本分注装置100では、シリンジ1のノズル11から圧力を持って吐出される液体を、ディッシュ5の上記第1領域に向けて直接掛けることが可能となる。第1領域に向けて直接吐出された液体は、ディッシュ5の内底面上を広がりながら流下する。これにより、ディッシュ5の内底面上に軽く付着または粘着している細胞を、効果的に洗い流すことが可能となる。
【0067】
さらに本実施形態の分注装置100は、分注動作を実行する際に、制御部2が駆動部8を駆動し、ディッシュ装着部22を、ディッシュ5の底面の中心を通り、この底面に垂直な回転軸を中心にディッシュ装着部22を回転させる。
【0068】
このようにすることにより、ディッシュ5を回転させながら液体を吐出することができるので、シリンジ1のノズル11から圧力をもって第1領域に吐出された液体を、ディッシュ5の内底面の周囲に渡って直接掛けることが可能となる。そしてこれにより、ディッシュ5の内底面上に軽く付着または粘着している細胞を、より効果的に流すことが可能となる。
【0069】
制御部2は、シリンジ1から所定量の液体が吐出されると、ディッシュ装着部22の上記回転を停止すると共に、シリンジ1からの液体の吐出を停止する。
【0070】
そして分注装置100は、分注終了動作を行う(S17)。分注終了動作では、例えばシリンジ1のノズル11から液滴や泡が垂れるのを防止するため、制御部2が駆動部8を駆動することによって、例えばノズル11の先端をディッシュ5の内側面に接触させ、ノズル11の先端の液滴や泡を除去する。
【0071】
この分注終了動作が完了すると、シリンジ1から吐出された所定量の液体は、図9に示す、ディッシュ5の第2領域に貯留している。この第2領域は、傾斜したディッシュ装着部22に装着されたディッシュ5の内底面と内側面とが接する領域のうち最下部近傍の領域である。
【0072】
次に、制御部2は、シリンジ1からの液体の吐出を停止している間に、駆動部8を駆動し、シリンジ1のノズル11を第2領域に向け(S18)、その後、洗い流された細胞を含む、第2領域に溜まった液体の吸引動作を行う(S19)。
【0073】
制御部2は、シリンジ1を第2領域に向けるために、第1〜第3サーボモータ51〜53を駆動し、第1〜第3回転軸を中心に第1〜第3駆動機構31〜33の構成要素をそれぞれ所定角度だけ回転させる。シリンジ1を第2領域に向けるためのそれぞれの目標回転量あるいは目標回転位置は、予め記憶部41に記憶されている。制御部2は、ロータリポテンショメータからの検出信号と記憶部41に記憶されている目標回転量あるいは目標回転位置とを比較しながら、シリンジ1を第2領域に向ける。
【0074】
本分注装置100では、シリンジ1のノズル11をディッシュ5の底面に垂直に向けた際のノズル11から底面に至る垂線の向きを基準に、ノズル11の向きを第1方向及び第2方向に変えることによって、ノズル11を第2領域に向けることができるので、図10(A)に示すように、ディッシュ5の内底面及び内側面のそれぞれに対して所定の角度を持って、シリンジ1のノズル11をディッシュ5の底面及び側面と干渉させることなく、ノズル11を第2領域に向けることができる。
【0075】
こうして本分注装置100では、傾斜したディッシュ5の第2領域に貯留している液体を、吸引することが可能となる。
【0076】
また本分注装置100は、ノズル11を第2領域に向ける際に、第3駆動機構33を駆動することによって、シリンジ1を鉛直下向に移動させるようにしている。このため、傾斜したディッシュ5の第2領域に溜まった液中、最も深い所にノズル11の先端を配置させることができるので、第2領域に流下した液体を残留させることなく回収することができる。
【0077】
吸引動作では、制御部2の制御によって、ポンプP1を停止し、バルブV1を閉じた状態で、ポンプP2を駆動するとともにバルブV2を開いて、ポンプP2が発生させる圧力(負圧)によって、ディッシュ5の第2領域に貯留している液体を、シリンジ1のノズル11から吸引する(ポンプ駆動吸引)。
【0078】
分注装置100は、上記S15からS19までの処理を所定回数だけ、本例では3回乃至5回実行する(S20)。所定回数が2回以上に設定されている場合には、分注装置100は、S15からS19の処理回数が所定回数になるまで、上記S15からS19までの処理を実行する。S15からS19までの処理を複数回実行することにより、ディッシュ5の内底面に軽く付着または粘着した細胞を回収するような場合、細胞をより多くより確実に回収することが可能となる。
【0079】
分注装置100は、S15からS19までの処理を所定回数だけ実行すると(S20;Yes)、制御部2が駆動部8を駆動し、シリンジ1を放出位置に移動させ(S21)、最後に吸引した液体を貯留タンク7に分注する放出動作を行う(S22)。即ち、吸引した細胞をタンクに回収する。
【0080】
放出位置は、所定位置に設置されている貯留タンク7の内部にシリンジ1のノズル11から液体が吐出される位置である。
【0081】
制御部2は、シリンジ1を放出位置に移動させるために、第1〜第3サーボモータ51〜53を駆動し、第1〜第3回転軸を中心に第1〜第3駆動機構31〜33の構成要素をそれぞれ所定角度だけ回転させる。シリンジ1を放出位置に移動させるためのそれぞれの目標回転量あるいは目標回転位置は、予め記憶部41に記憶されている。制御部2は、ロータリポテンショメータからの検出信号と記憶部41に記憶されている目標回転量あるいは目標回転位置とを比較しながら、放出位置までシリンジ1を移動させる。
【0082】
放出動作では、分注動作と同様に、制御部2の制御によってポンプ駆動吐出を行い、ポンプP1が発生させる圧力によって、ディッシュ5の第2領域からシリンジ1内に吸引した細胞を含む液体を貯留タンク7に吐出させる(ポンプ駆動吐出)。
【0083】
なお、放出動作は、例えば、十分な深さの貯留タンク7にノズル11を深く挿入し、ノズル11の先端を貯留タンク7の内壁に接触させながら行うなど、ポンプ駆動吐出を行っても周囲が汚染されないような対策を行うことがより望ましい。
【0084】
そして、制御部2は、S21、S22の放出動作、即ち回収処理を所定回数だけ、本例では2回乃至3回実行したか判定し(S23)、所定回数に達したならば一連のシーケンスを終了する(S26)。
【0085】
他方、所定回数に達していなければ(S23;No)、制御部2は駆動部8を駆動し、シリンジ1を充填位置(図7において、シリンジ1のノズル11がリザーバ6内の液中になる位置)に移動させ(S24)、充填動作を行う(S25)。
【0086】
充填動作では、制御部2の制御によって、ポンプP1を停止し、バルブV1を閉じた状態で、ポンプP2を駆動するとともにバルブV2を開いて、ポンプP2が発生させる圧力(負圧)によってシリンジ1内に新しい液体(例えば、培地)を吸引させる(ポンプ駆動吸引)。所定量を吸引させたらポンプP2を停止し、バルブV2を閉じる。
【0087】
そして、ステップS15に復帰し、制御部2は再びS15からS19までの処理を所定の回数実行する。この場合、リザーバ6から充填した新しい新鮮な例えば培地を用いて掛け流し(分注)と吸引を繰り返すものである。このように、元の培地による掛け流しと吸引に加えて、新しい培地による掛け流しと吸引も更に実行することで、より確実に細胞を回収できるようになる。本実施形態では(S20の所定回数)×(S23の所定回数)回に亘って処理を繰り返すことになる。
【0088】
以上、本実施形態の分注装置100によれば、ディッシュ5の内底面の周縁部分を含むあらゆる領域に対して、シリンジ1のノズル11から吐出された液体を直接掛けることが可能になる。
【0089】
これにより、例えばディッシュ5から細胞を回収する処理において、ディッシュ5の底に軽く付着または粘着した細胞をより多く洗い流すことができて、細胞の回収効率を向上させることができる。また、トリプシンなどの剥離剤によって剥がれかけた細胞や、ディッシュ底面に沈殿、粘着した細胞など、流下する液体の流れや、短時間の分注だけでは回収が困難であった細胞に対しても、細胞を流すのに十分な量の液体を所定時間、所定流量で直接掛けることができるので、回収率が向上する。
【0090】
一例として、通常100mmディッシュと呼ばれる一般的なサイズのディッシュの場合を考える。100mmディッシュの内底部の直径は90[mm]程度である。
【0091】
これまでの装置で吐出液を直接掛けることができなかった領域は、内底部の周囲5[mm]程度のリング状の領域であると推定すると、これまでの装置では、40[mm]×40[mm]×3.14=5024.0[mm2]の面積にしか、吐出液を直接掛けることができなかったことになる。
【0092】
本分注装置100では、内底面全面に亘って直接吐出液を掛けることができるので、45[mm]×45[mm]×3.14=6358.5[mm2] の面積に吐出液を直接かけることが可能になる。
【0093】
上記各面積を比較すると、6358.5[mm2]/ 5024.0[mm2]=1.27であるから、約27[%]もの効率向上が実現できることになる。
【0094】
本実施形態に係る分注装置100は、図9、図10に示すように、シリンジ1のノズル11から液体を吐出する際に、傾斜したディッシュ5の内底面と内側面とが接する円環状の領域内の最上部近傍の領域(第1領域)にシリンジ1のノズル11を向けるようにしている。これにより、シリンジ1のノズル11から上記第1領域に向けて直接吐出された液体が、ディッシュ5の内底面上を広がりながら流下するので、ディッシュ5の内底面上に軽く付着または粘着している細胞を効果的に回収することが可能となる。
【0095】
またシリンジ1のノズル11から液体を吐出する際には、ディッシュ5の底面の中心を通り、この底面に垂直な回転軸を中心にディッシュ装着部22を回転させるようにすることもできる。このようにすることにより、ディッシュ5を回転させながら液体を吐出することができるので、シリンジ1のノズル11から上記第1領域に吐出された液体を、ディッシュ5の内底面の周囲に渡って直接掛けることが可能となる。またこの場合、ノズル11から吐出された液体の水流と、ディッシュ5の回転速度との相乗効果により、ディッシュ5の内底面上での液体の流速が上昇し、ディッシュ5に軽く付着または粘着している細胞を、より効果的に回収することが可能となる。
【0096】
またディッシュ装着部22を回転させる場合には、ディッシュ装着部22を、例えば同一方向に1周以上させるようにしてもよい。このようにすることにより、ディッシュ5の上記円環状の領域の全周に亘り、液体を直接掛けることが可能となる。
【0097】
あるいは、ディッシュ装着部22を回転させる場合には、ディッシュ装着部22を、交互に逆回転させるようにしてもよい。例えば、ディッシュ装着部22を1周毎に逆回転させるようにしてもよいし、半周毎に逆回転させるようにしても良い。このようにしても、ディッシュ5の上記円環状の領域の全周に亘り、液体を直接掛けることが可能となる。また特に、回転の向きを変えることにより、ノズル11から吐出された液体がディッシュ5に降り注ぐ際に、回転方向によって異なる向きから降り注ぐようにできるので、ディッシュ5に軽く付着または粘着している細胞の回収効果をより向上させることが可能となる。
【0098】
またシリンジ1のノズル11から液体を吐出する際には、ノズル11の向きを、傾斜したディッシュ5の内底面と内側面とが接する円環状の領域内の最上部近傍の領域(第1領域)から最下部近傍の領域(第2領域)に移動させるようにしても良い。これにより、シリンジ1のノズル11から上記第1領域に向けて直接吐出された液体が、ディッシュ5の内底面上を広がりながら流下すると共に、ノズル11が第2領域に向けて移動することにより、移動経路上の領域に対しても液体を直接掛けることができる。さらにこの場合、ノズル11の向きを、傾斜したディッシュ5の内底面と内側面とが接する円環状の領域内において水平方向に向かい合う2つの領域(第3領域と第4領域)とを結ぶ方向にも移動させるように組み合わせても良い。
【0099】
またシリンジ1のノズル11から液体を吐出する際には、ノズル11の向きを、左右方向(第2方向)に交互に変えながら、上下方向に移動させ、ディッシュ5内底面全面を走査するように移動させても良い。これにより、シリンジ1のノズル11から吐出された液体が、ディッシュ5の内底面上を広がりながら流下すると共に、ノズル11の移動経路上の広範囲な領域に対しても液体を直接掛けることができる。なおこの場合、ディッシュ装着部22を固定した上で、ノズル11の向きを移動させても良い。このようにすれば、ディッシュ装着部22を回転させなくても良いので、例えば第5駆動機構35を省くことも可能となる。
【0100】
またさらに、例えば、分注動作を行う際に、シリンジ1のノズル11を、最初に図9(A)に示す第2領域(傾斜したディッシュ5の内底面と内側面とが接する円環状の領域内の最下部近傍の領域)に向け、ディッシュ5の内底面と内側面とが接する円環状の領域内に沿って周回させるようにしても良い。このようにすれば、ディッシュ装着部22を回転させなくても良いので、例えば第5駆動機構35を省くことも可能となる。
【0101】
上記実施形態は、本発明の理解を容易にするためのものであり、本発明を限定して解釈するためのものではない。本発明は、その趣旨を逸脱することなく、変更、改良され得るとともに、本発明にはその等価物も含まれる。
【符号の説明】
【0102】
1 シリンジ
2 制御部
3 シリンジ駆動部
4 ディッシュ駆動部
5 ディッシュ(培養皿)
6 リザーバ
7 貯留タンク
8 駆動部
11 ノズル
12 フィルタ
22 ディッシュ装着部
31 第1駆動機構
32 第2駆動機構
33 第3駆動機構
34 第4駆動機構
35 第5駆動機構
36 第1ロッド
37 第2ロッド
41 記憶部
42 タッチパネル
43 ディスプレイ
51 第1サーボモータ
52 第2サーボモータ
53 第3サーボモータ
54 第4サーボモータ
55 第5サーボモータ
100 分注装置
101 分注機構
P1、P2 ポンプ
V1、V2 バルブ
【特許請求の範囲】
【請求項1】
底面及び前記底面を囲む側面を有して形成されるディッシュが装着されるディッシュ装着部と、
液体を吐出するノズルを有するシリンジと、
前記ディッシュ装着部を前記シリンジに向けて傾斜させると共に、前記シリンジのノズルを前記ディッシュの内底面に垂直に向けた際の前記ノズルから前記内底面に至る垂線の向きを基準に、前記シリンジのノズルの向きを、前記ディッシュの内底面と内側面とが接する領域上において向かい合う2つの位置を結ぶ第1方向と、前記第1方向に交差する第2方向とにそれぞれ変える駆動部と、
前記シリンジのノズルから液体を吐出させる制御部と、
を備えることを特徴とする分注装置。
【請求項2】
請求項1に記載の分注装置であって、
前記駆動部は、前記制御部が前記シリンジのノズルから液体を吐出させる場合に、傾斜した前記ディッシュの内底面と内側面とが接する円環状の領域内の最上部近傍の位置に前記シリンジのノズルを向けると共に、前記ディッシュ装着部を、前記ディッシュの底面の中心を通る垂線を回転軸として回転させる
ことを特徴とする分注装置。
【請求項3】
請求項1に記載の分注装置であって、
前記駆動部は、前記制御部が前記シリンジのノズルから液体を吐出させる場合に、傾斜した前記ディッシュの内底面と内側面とが接する円環状の領域に沿って前記シリンジのノズルの向きを変える
ことを特徴とする分注装置。
【請求項4】
請求項1に記載の分注装置であって、
前記駆動部は、前記制御部が前記シリンジのノズルから液体を吐出させる場合に、前記ディッシュ装着部を固定すると共に、傾斜した前記ディッシュの内底面と内側面とが接する円環状の領域を含む前記ディッシュの内底面上の所定経路に沿って、前記シリンジのノズルの向きを変える
ことを特徴とする分注装置。
【請求項5】
請求項1〜4のいずれかに記載の分注装置であって、
前記駆動部は、前記シリンジのノズルの向きを変えると共に、前記シリンジを鉛直方向に移動させる
ことを特徴とする分注装置。
【請求項6】
底面及び前記底面を囲む側面を有して形成されるディッシュが装着されるディッシュ装着部と、
前記ディッシュ装着部より上方に、液体を吐出するノズルを有するシリンジを備えた分注装置であって、
前記ディッシュ装着部に装着された前記ディッシュの内底面における垂線と直交する第1軸を中心として前記シリンジの向きを変える第1駆動部と、
前記垂線に直交するとともに前記第1軸に垂直な第2軸を中心として前記シリンジの向きを変える第2駆動部と、
を備えることを特徴とする分注装置。
【請求項1】
底面及び前記底面を囲む側面を有して形成されるディッシュが装着されるディッシュ装着部と、
液体を吐出するノズルを有するシリンジと、
前記ディッシュ装着部を前記シリンジに向けて傾斜させると共に、前記シリンジのノズルを前記ディッシュの内底面に垂直に向けた際の前記ノズルから前記内底面に至る垂線の向きを基準に、前記シリンジのノズルの向きを、前記ディッシュの内底面と内側面とが接する領域上において向かい合う2つの位置を結ぶ第1方向と、前記第1方向に交差する第2方向とにそれぞれ変える駆動部と、
前記シリンジのノズルから液体を吐出させる制御部と、
を備えることを特徴とする分注装置。
【請求項2】
請求項1に記載の分注装置であって、
前記駆動部は、前記制御部が前記シリンジのノズルから液体を吐出させる場合に、傾斜した前記ディッシュの内底面と内側面とが接する円環状の領域内の最上部近傍の位置に前記シリンジのノズルを向けると共に、前記ディッシュ装着部を、前記ディッシュの底面の中心を通る垂線を回転軸として回転させる
ことを特徴とする分注装置。
【請求項3】
請求項1に記載の分注装置であって、
前記駆動部は、前記制御部が前記シリンジのノズルから液体を吐出させる場合に、傾斜した前記ディッシュの内底面と内側面とが接する円環状の領域に沿って前記シリンジのノズルの向きを変える
ことを特徴とする分注装置。
【請求項4】
請求項1に記載の分注装置であって、
前記駆動部は、前記制御部が前記シリンジのノズルから液体を吐出させる場合に、前記ディッシュ装着部を固定すると共に、傾斜した前記ディッシュの内底面と内側面とが接する円環状の領域を含む前記ディッシュの内底面上の所定経路に沿って、前記シリンジのノズルの向きを変える
ことを特徴とする分注装置。
【請求項5】
請求項1〜4のいずれかに記載の分注装置であって、
前記駆動部は、前記シリンジのノズルの向きを変えると共に、前記シリンジを鉛直方向に移動させる
ことを特徴とする分注装置。
【請求項6】
底面及び前記底面を囲む側面を有して形成されるディッシュが装着されるディッシュ装着部と、
前記ディッシュ装着部より上方に、液体を吐出するノズルを有するシリンジを備えた分注装置であって、
前記ディッシュ装着部に装着された前記ディッシュの内底面における垂線と直交する第1軸を中心として前記シリンジの向きを変える第1駆動部と、
前記垂線に直交するとともに前記第1軸に垂直な第2軸を中心として前記シリンジの向きを変える第2駆動部と、
を備えることを特徴とする分注装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2013−17461(P2013−17461A)
【公開日】平成25年1月31日(2013.1.31)
【国際特許分類】
【出願番号】特願2011−155925(P2011−155925)
【出願日】平成23年7月14日(2011.7.14)
【出願人】(592031097)パナソニックヘルスケア株式会社 (28)
【Fターム(参考)】
【公開日】平成25年1月31日(2013.1.31)
【国際特許分類】
【出願日】平成23年7月14日(2011.7.14)
【出願人】(592031097)パナソニックヘルスケア株式会社 (28)
【Fターム(参考)】
[ Back to top ]