
分配装置及び分配方法
【課題】粉粒体の不必要な損失を低減できる粉粒体の分配装置及び分配方法を提供すること。
【解決手段】分配装置10は、粉粒体を貯留し、下部に設けられた導出部25から粉流体が導出される貯留槽20と、導出部25の下方に所定間隔をあけて配置された受け板30と、導出部25及び受け板30を相対運動させる運動部60と、を備える。受け板30は、導出部25の直下から外方へと延在し且つ外方に向かって所定角度aで傾斜する緩斜部31と、この緩斜部31の内側に位置し外方に向かって所定角度aを超える角度bで傾斜する急斜部33と、を有する。
【解決手段】分配装置10は、粉粒体を貯留し、下部に設けられた導出部25から粉流体が導出される貯留槽20と、導出部25の下方に所定間隔をあけて配置された受け板30と、導出部25及び受け板30を相対運動させる運動部60と、を備える。受け板30は、導出部25の直下から外方へと延在し且つ外方に向かって所定角度aで傾斜する緩斜部31と、この緩斜部31の内側に位置し外方に向かって所定角度aを超える角度bで傾斜する急斜部33と、を有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、粉粒体の分配装置及び分配方法に関する。
【背景技術】
【0002】
従来、粉粒体の分配装置について、所望量の粉粒体を分配するための開発がなされている(特許文献1参照)。
【0003】
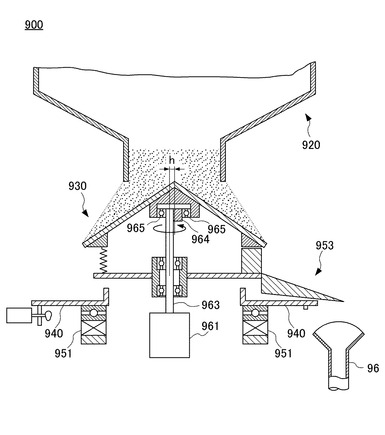
図10は従来例に係る分配装置900の断面図である。分配装置900は粉粒体を貯留する貯留槽本体920を備え、この貯留槽本体920の下方には傘状の受け板930が配置されている。
【0004】
受け板930は偏心カム964及び軸受965を介して回転軸963に連結されており、この回転軸963は回転モータ961に設けられている。これにより、回転モータ961が稼動すると、回転軸963が回転し、これに伴って受け板930が水平方向に円運動することになる。このように受け板930が円運動すると、受け板930上に落下した粉粒体は水平方向に揺動され、受け板930の下方に配置された受けドラム940上に振り落とされる。この受けドラム940にはロードセル951が設けられており、このロードセル951は受けドラム940上の粉粒体量を測定する。
【0005】
回転軸963にはスクレーパ953も設けられており、回転軸963の回転に伴ってスクレーパ953も回転する。すると、スクレーパ953は受けドラム940上の粉粒体を下方のホッパ96に掃き落とし、ホッパ96に分配された粉粒体は製品として搬送されることになる。
【特許文献1】特開平4−126543号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかし、前述した分配装置900では、回転モータ961の稼動時のみならず非稼動時においても、貯留槽本体920内の粉粒体が受け板930から受けドラム940へと落下する。このように、貯留槽本体920内の粉粒体が恒常的に流失するため、粉粒体の無駄な損失や、流失した粉粒体の除去作業等が発生するという問題がある。
【0007】
本発明は、以上の実情に鑑みてなされたものであり、粉粒体の不必要な損失を低減できる粉粒体の分配装置及び分配方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明者らは、分配装置から受け板へと導出される粉粒体の堆積状態に着目し、本発明を完成するに至った。具体的には、本発明は以下のようなものを提供する。
【0009】
(1) 粉粒体を貯留し、下部に設けられた導出部から粉流体が導出される貯留槽と、
前記導出部の下方に所定間隔をあけて配置された受け板と、
前記導出部及び前記受け板を相対運動させる運動手段と、を備える粉粒体の分配装置であって、
前記受け板は、前記導出部の直下から外方へと延在し且つ外方に向かって所定角度で傾斜する緩斜部と、この緩斜部の内側に位置し外方に向かって前記所定角度を超える角度で傾斜する急斜部と、を有する分配装置。
【0010】
受け板の傾斜が大きいと、導出部から受け板へと導出された粉粒体が急角度で堆積するため、自然に崩落して恒常的に流失しやすくなる。
そこで(1)の発明によれば、導出部の直下から外方へと緩斜部を延在させたので、導出部及び受け板の間隙から漏出する粉粒体が受け板の外縁から自然落下するのが抑制される。これにより、分配を所望する場合には、運動手段を稼動して粉粒体に外力を負荷することで粉粒体を落下させる一方、分配停止を所望する場合には、運動手段の駆動力を抑制して粉粒体への外力の負荷を低減することで粉粒体の落下を抑制すればよい。このようにして、粉粒体の不必要な損失を低減できる。
【0011】
しかし、粉粒体同士又は粉粒体と貯留槽との間の摩擦力が大きいため、貯留された粉粒体が貯留槽内部で略固化し、受け板への落下が滞ることが懸念される(いわゆるブリッジ現象)。
そこで(1)の発明によれば、急斜部が貯留槽内部の粉粒体に突き刺さり、略固化するのを抑制する。これにより、粉粒体の受け板への落下がスムーズになり、粉粒体の分配量を正確に調節できる。
【0012】
なお、導出部及び受け板を相対運動させるとは、導出部及び受け板のいずれか一方又は双方を運動させることをいう。また、所定角度は、通常正の値が想定されるが、ゼロ又は負の値であってもよい。ただし、急斜部の傾斜角度は必ず正の値である。
【0013】
(2) 前記運動手段は、前記受け板を水平方向に運動させる水平運動手段を有する(1)記載の分配装置。
【0014】
運動手段によって運動させられる対象が導出部である場合、運動手段を稼動しても、導出部の外方へと延在する緩斜部上に堆積する粉粒体に対して、充分な外力を負荷することが困難である。
そこで(2)の発明によれば、水平運動手段を設けたので、受け板が水平方向に運動させられる。このため、水平運動手段を稼動すると、緩斜部上に堆積する粉粒体が遠心力によって受け板から落下する。よって、水平運動手段の駆動力を調整することで、粉粒体の分配量をより正確に調節できる。
【0015】
(3) 前記運動手段は、前記導出部の先端を移動させ、前記導出部の先端及び前記緩斜部の間隙を調節する間隙調節手段を有する(1)又は(2)記載の分配装置。
【0016】
(3)の発明によれば、導出部の先端及び緩斜部の間隙が調節され、緩斜部上に堆積する粉粒体量が所望の程度に制限される。このように、粉粒体の分配量をより正確に調節できる。
【0017】
なお、導出部及び緩斜部の間隙を調節するために、受け板(特に緩斜部)を上下動する構成も考えられる。しかし、この構成では、上下動の変わり目に生じる慣性力で、受け板上の粉粒体が不必要に落下するおそれがある。
そこで(3)の発明によれば、間隙調節手段を設けたので、導出部の先端が移動するため、粉粒体の不必要な損失を低減できる。
【0018】
(4) 前記受け板から落下する粉粒体量を一定時間ごとに測定する測定手段を更に備える(1)から(4)いずれか記載の分配装置。
【0019】
(4)の発明によれば、測定手段を設けたので、受けドラムに堆積された粉粒体の量が一定時間ごとに測定され、一定時間ごとに採取される。よって、この測定値に基づいて、受けドラム上に落下する粉粒体量を調節すれば、一定時間ごとに採取する粉粒体量が一定化する。従って、粉粒体の分配量をより正確に調節できる。
【0020】
なお、測定値に基づく受けドラム上への粉粒体落下量の調節は、自動制御されてもよいし、手作業による制御であってもよい。
【0021】
(5) 前記測定手段による測定値に基づいて、前記運動手段を駆動制御する制御手段を更に備える(4)記載の分配装置。
【0022】
分配量を調節するためには、受けドラム上に一定量が堆積した時点で粉粒体を採取するという構成も考えられる。しかし、受けドラムへの落下量が著しく低下した場合、採取時間が長期化するため、分配効率が悪い。
【0023】
そこで(5)の発明によれば、制御手段を設けたので、測定値が所定値と異なる場合には、増減手段を制御して受けドラムへの落下量が調節され、測定手段によって採取される粉粒体量が一定化する。よって、粉粒体の分配量を正確且つ迅速に調節できる。
【0024】
(6) 前記制御手段は、前記導出部及び前記受け板の相対運動の速度を変動制御する運動速度変動手段を有する(5)記載の分配装置。
【0025】
(6)の発明によれば、運動速度制御手段を設けたので、受けドラムへの落下量が運動速度の変動によって容易に調節される。よって、粉粒体の分配量を正確、迅速且つ容易に調節できる。
【0026】
(7) 粉粒体を貯留し、下部に設けられた導出部から粉流体が導出される貯留槽と、前記導出部の下方に所定間隔をあけて配置された受け板と、を備える分配装置を用いた粉粒体の分配方法であって、
水平方向に対して粉粒体の安息角をなす角度で前記導出部の先端から延びる仮想線が前記受け板と交差する状態が維持されるように、前記導出部及び前記受け板を相対運動させる運動手順を有する分配方法。
【0027】
(7)の発明によれば、安息角で堆積するすべての粉粒体が受け板上に堆積されるため、自然崩落が抑制され、不必要な粉粒体の損失を抑制できる。このような運動手順は、使用する粉粒体の種類に応じて、導出部及び受け板の相対運動の経路や速度等を適宜設定しつつ行えばよい。
【0028】
なお、安息角とは、粉粒体を積み上げたとき、自発的に崩れることなく安定を保つ場合の斜面の角度を指し、公知の装置を用いて測定される。
【0029】
(8) 前記受け板から落下する粉粒体量を一定時間ごとに測定する測定手順と、
前記測定手順での測定値に基づいて、前記導出部及び前記受け板の相対運動を調節する落下速度調節手順と、を更に有する(7)記載の分配方法。
【0030】
(8)記載の分配方法は、(5)記載の分配装置を分配方法として展開したものである。よって、(8)の発明によれば、(5)の発明と同様の効果が得られる。
【0031】
(9) 前記落下速度調節手順は、前記導出部及び前記受け板の相対運動の速度を変動させる運動速度変動手順を有する(8)記載の分配方法。
【0032】
(9)記載の分配方法は、(6)記載の分配装置を分配方法として展開したものである。よって、(9)の発明によれば、(6)の発明と同様の効果が得られる。
【発明の効果】
【0033】
本発明によれば、導出部の直下から外方へと緩斜部を延在させたので、導出部及び受け板の間隙から漏出する粉粒体が受け板の外縁から自然落下するのが抑制される。これにより、分配を所望する場合には、運動手段を稼動して粉粒体に外力を負荷することで粉粒体を落下させる一方、分配停止を所望する場合には、運動手段の駆動力を抑制して粉粒体への外力の負荷を低減することで粉粒体の落下を抑制すればよい。このようにして、粉粒体の不必要な損失を低減できる。
また、急斜部が貯留槽内部の粉粒体に突き刺さり、略固化するのを抑制する。これにより、粉粒体の受け板への落下がスムーズになり、粉粒体の分配量を正確に調節できる。
【発明を実施するための最良の形態】
【0034】
以下、本発明の実施形態について、図面を参照しながら説明する。なお、第1実施形態以外の各実施形態の説明において、第1実施形態と共通するものについては、同一符号を付し、その説明を省略する。
【0035】
<第1実施形態>
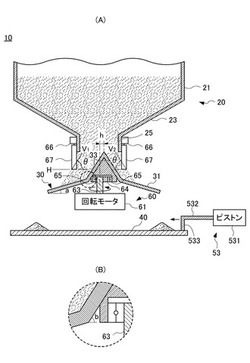
図1は、本発明の第1実施形態に係る分配装置10の概略構成図である。分配装置10は、貯留槽20と、受け板30と、受けドラム40とを備える。各構成要素について、以下詳細に説明する。
【0036】
〔貯留槽〕
粉粒体を貯留する貯留槽20は貯留槽本体21を備え、この貯留槽本体21はテーパ部23によって絞られている。テーパ部23の先端には開口部251が突設され、この開口部251の外周には側壁板253が摺動可能に設けられている。これら開口部251及び側壁板253は導出部25を構成し、この導出部25から粉粒体が導出される。
【0037】
また、開口部251及び側壁板253のより下方に位置するものの先端が導出部の先端を構成するところ、本明細書では側壁板253の下端255が導出部の先端に相当することになる。
【0038】
なお、本実施形態では、粉粒体の落下を促進するべくテーパ部23を設けたが、テーパ部23は必須ではない。
【0039】
〔受け板〕
受け板30は貯留槽20の下方に配置され、貯留槽20からの粉粒体を一時的に受ける。かかる受け板30は、緩斜部31と、この緩斜部31の内側に位置する急斜部33とを有する。緩斜部31は、少なくとも側壁板253の直下から外方(図1における左右方向)へと延在し、外方に向かって所定角度aで傾斜する。また、急斜部33は、外方に向かって所定角度aを超える角度bで傾斜する。
【0040】
〔受けドラム〕
受けドラム40は受け板30の下方に配置された平板体であって、受け板30からの粉粒体を受ける。受けドラム40は、特に限定されないが、後述の延出部532との関係で摩擦力の低い素材で構成されることが好ましく、かかる素材としては「テフロン(登録商標)」で加工された鋼板等が挙げられる。
【0041】
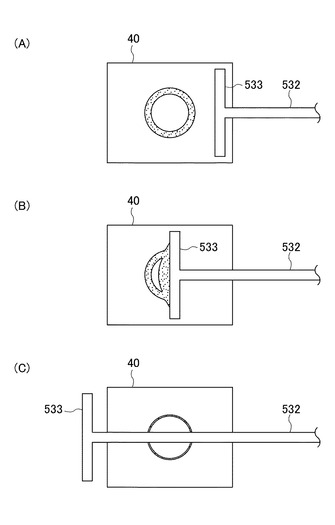
分配装置10は採取部53を更に備える。この採取部53はピストン531を有し、このピストン531は延出部532を水平方向に進退させる。延出部532には彗部533が設けられ、この彗部533は受けドラム40と略接触しながら、受けドラム40上を摺動する。
【0042】
図2は採取部53の使用状態を示す図である。受けドラム40上には受け板30から落下した粉粒体が堆積されている(図2(A))。ここで、ピストン531が稼動すると、延出部532が水平方向に進行し、彗部533が受けドラム40上の粉粒体を寄せ集める(図2(B))。更に延出部532が水平方向に進行すると、受けドラム40上に堆積した粉粒体は図示しないホッパに振り落とされ、製品化される。この動きを反復することで、受けドラム40上の粉粒体を採取することになる。
【0043】
〔運動部〕
図1に戻って、分配装置10は運動手段としての運動部60を更に備える。この運動部60は回転モータ61を有し、この回転モータ61に設けられた回転軸63は軸受65及び偏心カム64を介して受け板30に連結されている。軸受65は受け板30の中央から偏りhだけずれているため、回転モータ61が稼動すると、回転軸63の回転に伴って受け板30が水平方向に円運動することになる。すると、受け板30上の粉粒体が水平方向に揺動され、受けドラム40へと落下しやすくなる。以上の回転モータ61、回転軸63、偏心カム64、及び軸受65は水平運動手段を構成する。
【0044】
また、運動部60は間隙調節手段としての側壁ピストン66を更に備え、この側壁ピストン66には前述の側壁板253が接続されている。この側壁板253を上下動させることで、下端255及び緩斜部31の間隙が調節され、緩斜部31上に堆積する粉粒体量が所望の程度に制限されることになる。
【0045】
なお、本実施形態では、側壁板67が上下動する構成としたが、水平移動して側壁板253及び緩斜部31の間隙を拡大又は絞るように構成してもよい。
【0046】
〔使用方法〕
以上の分配装置10の使用方法を説明する。
【0047】
まず、粉粒体を貯留槽20に供給する。すると、粉粒体は導出部25から下方の受け板30へと落下する。落下した粉粒体は下端255から受け板30へと末広がりに堆積する。ここで、安息角Θよりも小さい角度aで傾斜する緩斜部31が外方まで延在しているため、粉粒体は安息角Θの傾斜を有する円錐を形成して、緩斜部31上に留まることになる。
【0048】
ここで、回転モータ61を稼動する。すると、受け板30が水平方向に円運動する結果、緩斜部31上の粉粒体に遠心力が負荷される。これにより、緩斜部31上に堆積した粉粒体は外方に振り落とされ、下方の受けドラム40へと落下する。
【0049】
このとき、偏りhを調節することで、水平方向Hに対して粉粒体の安息角Θをなす角度で下端255から延びる仮想線V1,V2が受け板30と交差する状態が維持されている(運動手順)。このため、導出部25から導出された粉粒体が緩斜部31から下方へと自然に落下することは抑制され、粉粒体の落下量は、粉粒体に負荷される外力に依存することになる。つまり、回転モータ61の回転速度が増減すると、受けドラム40への粉粒体の落下量も増減する。
【0050】
このようにして受けドラム40上に堆積した粉粒体は、ピストン531を稼動すると、彗部533によって図示しないホッパに振り落とされ、製品化される。
【0051】
(分配量)
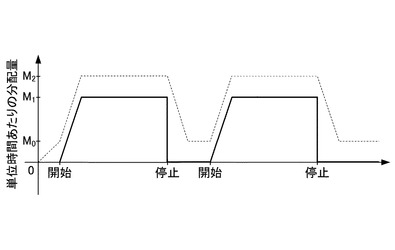
図3は、分配装置10を用いたときの、粉粒体の単位時間当たり分配量の変化を示す図である。図3における実線は分配装置10を用いた場合の粉粒体の分配量を指し、点線は従来の分配装置900を用いた場合の粉粒体の分配量を指す。
【0052】
従来の分配装置900では、粉粒体を貯留槽本体920に供給するや否や、粉粒体が受け板930から自然落下するため、恒常的にM0量の損失が観測される。その後、回転モータ961を稼動して分配を開始すると、分配量が増加し、粉粒体はM2量で分配される。やがて、回転モータ961を停止すると、分配量は徐々に低下し始めるも、M0量までしか低下せず、上記と同様に恒常的にM0量の損失が観測されることになる。
【0053】
これに対して、分配装置10では、粉粒体を貯留槽20に供給しても、ほぼすべての粉粒体が緩斜部31上に留まるため、粉粒体の損失がほとんど観測されない。その後、回転モータ61を稼動して分配を開始すると、分配量が増加し、粉粒体はM1量で分配される。やがて、回転モータ61を停止すると、粉粒体は、遠心力の負荷がなくなるため、自然落下せずに緩斜部31上に留まる。これにより、分配量は、回転モータ61の停止と同時にほぼゼロにまで急低下することになる。
【0054】
[作用効果]
本実施形態によれば、以下のような作用効果が得られる。
【0055】
下端255の直下から外方へと緩斜部31を延在させたので、下端255及び受け板30の間隙から漏出する粉粒体が受け板30の外縁から自然落下するのが抑制される。これにより、分配を所望する場合には、回転モータ61を稼動して粉粒体に外力を負荷することで粉粒体を落下させる一方、分配停止を所望する場合には、回転モータ61の駆動力を抑制して粉粒体への外力の負荷を低減することで粉粒体の落下を抑制すればよい。このようにして、粉粒体の不必要な損失を低減できる。
また、急斜部33が貯留槽20内部の粉粒体に突き刺さり、略固化するのを抑制する。これにより、粉粒体の受け板30への落下がスムーズになり、粉粒体の分配量を正確に調節できる。
【0056】
回転モータ61を設けたので、受け板30が水平方向に運動させられる。このため、回転モータ61を稼動すると、緩斜部31上に堆積する粉粒体が遠心力によって受け板30から落下する。よって、回転モータ61の駆動力を調整することで、粉粒体の分配量をより正確に調節できる。
【0057】
側壁ピストン66を設けたので、下端255及び緩斜部31の間隙が調節され、緩斜部31上に堆積する粉粒体量が所望の程度に制限される。このように、粉粒体の分配量をより正確に調節できる。また、受け板30ではなく下端255が移動するため、粉粒体の不必要な損失を低減できる。
【0058】
<第2実施形態>
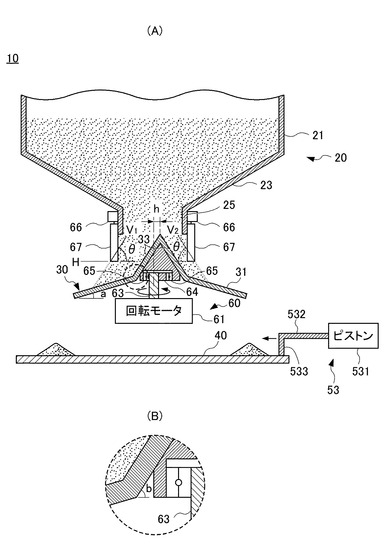
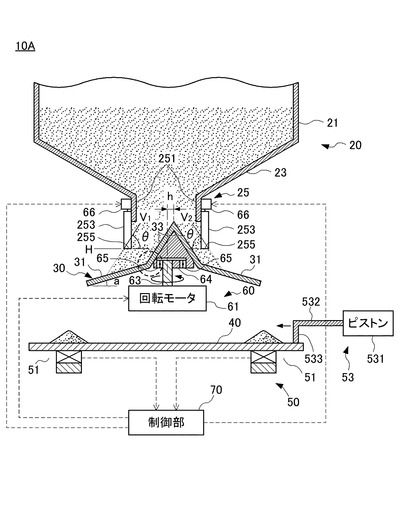
図4は、本発明の第2実施形態に係る分配装置10Aの概略構成図である。本実施形態は、測定部50及び制御部70を備える点において第1実施形態と異なる。
【0059】
〔測定部〕
測定部50はロードセル51を備える。このロードセル51は受けドラム40の下面に設けられ、受けドラム40上に堆積した粉粒体量を一定時間ごとに測定し、測定値を制御手段としての制御部70に送信する。具体的には、受け板30の外周縁の下方に位置するよう、複数個配置されている。なお、ロードセル51の測定機構は、例えば、内部に有するブリッジ回路の抵抗値の変化に基づいて、受けドラム40上の粉粒体量を測定するものである。
【0060】
〔制御部〕
制御部70は、ロードセル51から受信した測定値に基づいて、側壁ピストン66及び回転モータ61を駆動制御する。具体的には、測定値が所望の値よりも小さいときは、側壁板253が上方向に移動するように側壁ピストン66を制御し、受け板30の円運動速度が増すように回転モータ61の出力を増加させる。一方、測定値が所望の値よりも大きいときは、側壁板253が下方向に移動するように側壁ピストン66を制御し、受け板30の円運動速度が減るように回転モータ61の出力を低下させる。ただし、制御は特に限定されず、種々の方式であってよい。制御部70が有する運動速度制御手段による制御例を以下に説明する。
【0061】
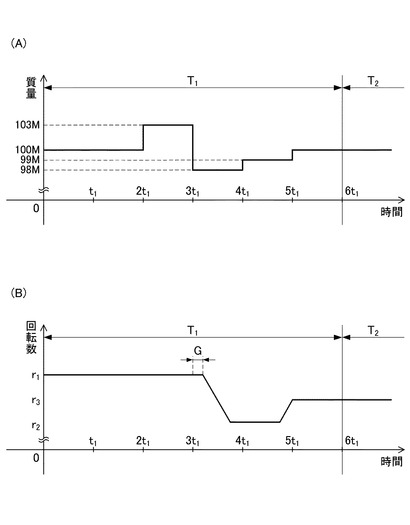
図5は、制御部70による回転モータ61の駆動制御の一例を示すタイミングチャートである。(A)が受けドラム40上に堆積した粉粒体質量の経時的変化を示し、彗部533の往復時間(t1)ごとに受けドラム40上の粉粒体量を測定した結果に基づく。一方、(B)は回転モータ61による偏心カム64の回転数の経時的変化を示す。
【0062】
ここでは、分配期間T1内に分配される粉粒体量を600Mに一定化するための制御を説明する。まず2t1〜3t1の区間において、何らかの理由により、受けドラム40上に堆積した粉粒体量が100Mから103Mに増加している。この測定値をロードセル51から受信した制御部70は、偏心カム64の回転数がr1からr2に低下するように回転モータ61を駆動制御する。これにより、3t1〜4t1の区間における受けドラム40上の粉粒体質量が98Mまで低下する。
【0063】
すると、98Mという測定値を受信した制御部70は、期間T1での総分配量が600Mとなるよう計算し、4t1〜5t1の区間の途中で偏心カム64の回転数がr2からr3に上昇するように回転モータ61を駆動制御する。これにより、4t1〜5t1の区間における受けドラム40上の粉粒体質量が99Mまで増加する。そして、この状態を持続することで、期間T1での総分配量が600Mとなる。
【0064】
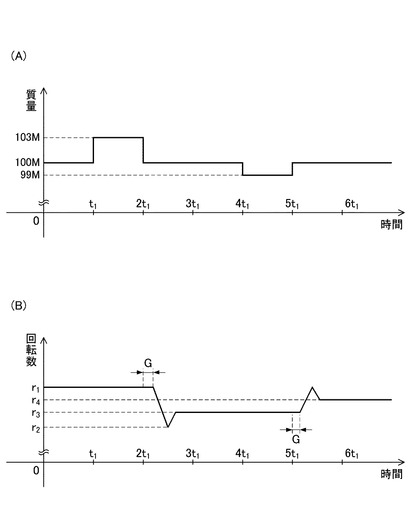
図4は、制御部70による回転モータ61の駆動制御の別の例を示すタイミングチャートである。(A)が受けドラム40上に堆積した粉粒体質量の経時的変化を示し、彗部533の往復時間(t1)ごとに受けドラム40上の粉粒体量を測定した結果に基づく。一方、(B)は回転モータ61による偏心カム64の回転数の経時的変化を示す。
【0065】
ここでは、往復時間t1内に分配される粉粒体量を100Mに一定化するための制御を説明する。まずt1〜2t1の区間において、何らかの理由により、受けドラム40上に堆積した粉粒体量が100Mから103Mに増加している。この測定値をロードセル51から受信した制御部70は、偏心カム64の回転数を急速にr1からr2に低下させ、次にr3まで上昇させる。これにより、次区間である2t1〜3t1における受けドラム40上の粉粒体質量が100Mに戻る。そしてこの状態を持続することで、3t1〜4t1の区間における受けドラム40上の粉粒体質量も100Mに維持される。
【0066】
しかし、4t1〜5t1の区間において、何らかの理由により、受けドラム40上に堆積した粉粒体量が100Mから99Mに低下している。この測定値をロードセル51から受信した制御部70は、偏心カム64の回転数を急速にr3からr4に上昇させ、次にr4まで低下させる。これにより、次区間である5t1〜6t1における受けドラム40上の粉粒体質量が100Mに戻る。そしてこの状態を持続することで、6t1以降の区間における受けドラム40上の粉粒体質量も100Mに維持されることになる。
【0067】
このように、往復期間と分配期間との関係等に応じて、制御の方式は一定の分配量が得られるよう適宜設定されてよい。
【0068】
[作用効果]
本実施形態によれば、前述した第1実施形態に加えて、以下の作用効果が得られる。
【0069】
測定部50を設けたので、受けドラム40に堆積された粉粒体の量が一定時間ごとに測定され、一定時間ごとに採取される。よって、この測定値に基づいて、受けドラム40上に落下する粉粒体量を調節すれば、一定時間ごとに採取する粉粒体量が一定化する。従って、粉粒体の分配量をより正確に調節できる。
【0070】
制御部70を設けたので、測定値が所定値と異なる場合には、回転モータ61及び側壁ピストン66を制御して受けドラム40への落下量が調節され、測定部50によって採取される粉粒体量が一定化する。よって、粉粒体の分配量を正確且つ迅速に調節できる。
【0071】
受けドラム40への落下量が運動速度の変動によって容易に調節される。よって、粉粒体の分配量を正確、迅速且つ容易に調節できる。
【0072】
<第3実施形態>
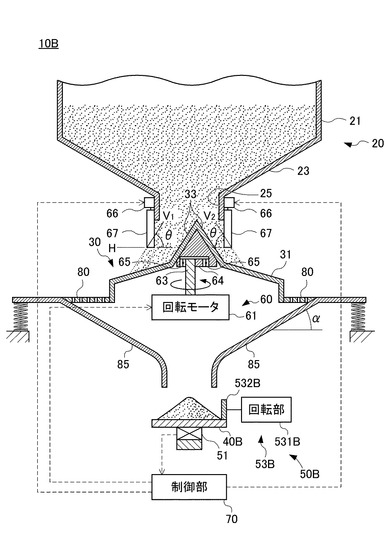
図7は、本発明の第3実施形態に係る分配装置10Bの概略構成図である。図8は図7のVIII−VIII線断面図である。本実施形態は、集約部85及びフィルタ80が設けられている点において第2実施形態と異なる。
【0073】
即ち、分配装置10Bは漏斗状の集約部85を更に備え、この集約部85の大開口が受け板30の下方に、小開口が受けドラム40Bの上方に位置する。大開口は受け板30よりも大きく形成されており、それによって形成された受け板30及び集約部85の隙間にはフィルタ80が介在する。これにより、受け板30から落下した粉粒体はフィルタ80でろ過されて塊(ダマ)を除かれる。
【0074】
集約部85は水平方向に対して角度αだけ内方に傾斜しており、フィルタ80を通過した粉粒体は集約部85の内部を滑って小開口から受けドラム40Bへと落下することになる。受けドラム40Bは小開口よりも若干大きく構成されており、受けドラム40B上に堆積した粉粒体は採取部53Bの稼動によって、図示しないホッパに振り落とされる。
【0075】
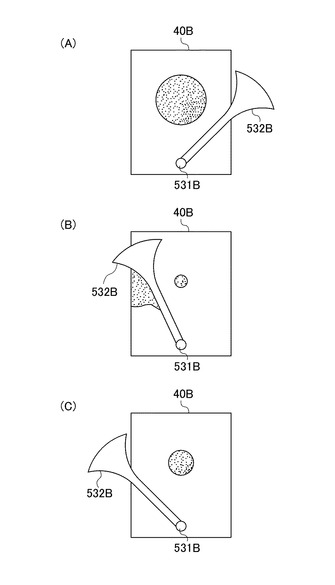
図8は、採取部53Bの使用状態を示す図である。採取部53Bは、受けドラム40B上に立設された回転部531Bを有し、この回転部531Bを中心としてワイパ532Bが受けドラム40B上を水平方向に回転運動する。
【0076】
受けドラム40B上には小開口から落下した粉粒体が堆積されている(図8(A))。回転部531Bが稼動すると、延出部532が水平方向に回転する。ここで、ワイパ532Aの側面は湾曲しているので、ワイパ532Bが受けドラム40B上の粉粒体を寄せ集める(図8(B))。更にワイパ532Bが回転すると、受けドラム40B上に堆積した粉粒体は図示しないホッパに振り落とされ、製品化される。この動きを反復することで、一定時間ごとに粉粒体を採取することになる。
【0077】
[作用効果]
本実施形態によれば、前述した第2実施形態に加えて、以下の作用効果が得られる。
【0078】
集約部85を更に設けたので、受け板30から落下した粉粒体は大開口から集約部85内部に侵入し、内部を滑って小開口から集約して放出される。よって、放出される粉粒体を受け止める受けドラム40Bを小型化でき、これに伴って測定部50を小型化したり、部品点数を削減したりすることができる。
【0079】
受け板30及び集約部85の間にフィルタ80を設けたので、粉粒体に混在する塊(ダマ)が除去される。このため、フィルタ80を通過し、やがて分配される粉粒体を均質化できる。
【0080】
〔変形例〕
本発明は前記実施形態に限定されるものではなく、本発明の目的を達成できる範囲での変形、改良等は本発明に含まれるものである。
【0081】
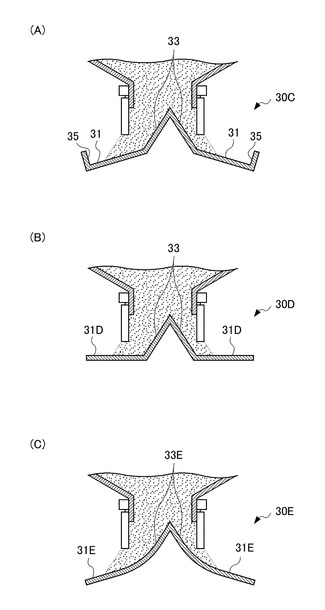
例えば、前記実施形態では、受け板を緩斜部及び急斜部のみで構成したが、これに限られず、内方に向かって傾斜する部材(せき止め部)も受け板が備える構成であってもよい。具体的には、図9(A)に示されるように、せき止め部35が緩斜部31の外側に位置してよい。かかる構成によれば、せき止め部35で粉粒体がせき止められるので、不必要な粉粒体の損失をより抑制できる。
【0082】
また、前記実施形態では、角度aを正の値としたが、負の値であってもよい。また、図9(B)に示されるように、緩斜部31Dは略水平に配置されてよい。
【0083】
前記実施形態では、角度a,bの各々を一定値としたが、角度aよりも角度bが大きい関係が維持される限りにおいて特に限定されず、角度a,bの一方又は双方を順次変化させてもよい。具体的には、図9(C)に示されるように、緩斜部31E及び急斜部33Eが滑らかに湾曲してよい。
【0084】
また、受け板の形状は、本実施形態では傘状としたが、これに限られない。例えば、平板体の中心に棒状体が突設された構成であってもよい。
【図面の簡単な説明】
【0085】
【図1】本発明の第1実施形態に係る分配装置の概略構成図である。
【図2】前記実施形態に係る分配装置を構成する測定手段の使用状態を示す図である。
【図3】前記実施形態に係る分配装置を用いたときの、粉粒体の単位時間当たり分配量の変化を示す図である。
【図4】本発明の第2実施形態に係る分配装置の概略構成図である。
【図5】前記実施形態に係る分配装置を構成する制御手段による増減手段の駆動制御の一例を示すタイミングチャートである。
【図6】前記実施形態に係る分配装置を構成する制御手段による増減手段の駆動制御の別の例を示すタイミングチャートである。
【図7】本発明の第3実施形態に係る分配装置の概略構成図である。
【図8】前記実施形態に係る分配装置を構成する測定手段の使用状態を示す図である。
【図9】本発明の変形例に係る受け板の概略構成図である。
【図10】従来例に係る分配装置の概略構成図である。
【符号の説明】
【0086】
10、10A、10B 分配装置
20 貯留槽
25 導出部
251 開口部
253 側壁板
255 下端(先端)
30、30C、30D、30E 受け板
31、31D、31E 緩斜部
33、33E 急斜部
35 せき止め部
50 測定部(測定手段)
60 運動部(運動手段)
61 回転モータ(水平運動手段)
63 回転軸(水平運動手段)
64 偏心カム(水平運動手段)
65 軸受(水平運動手段)
66 側壁ピストン(間隙調節手段)
70 制御部(制御手段、運動速度変動手段)
【技術分野】
【0001】
本発明は、粉粒体の分配装置及び分配方法に関する。
【背景技術】
【0002】
従来、粉粒体の分配装置について、所望量の粉粒体を分配するための開発がなされている(特許文献1参照)。
【0003】
図10は従来例に係る分配装置900の断面図である。分配装置900は粉粒体を貯留する貯留槽本体920を備え、この貯留槽本体920の下方には傘状の受け板930が配置されている。
【0004】
受け板930は偏心カム964及び軸受965を介して回転軸963に連結されており、この回転軸963は回転モータ961に設けられている。これにより、回転モータ961が稼動すると、回転軸963が回転し、これに伴って受け板930が水平方向に円運動することになる。このように受け板930が円運動すると、受け板930上に落下した粉粒体は水平方向に揺動され、受け板930の下方に配置された受けドラム940上に振り落とされる。この受けドラム940にはロードセル951が設けられており、このロードセル951は受けドラム940上の粉粒体量を測定する。
【0005】
回転軸963にはスクレーパ953も設けられており、回転軸963の回転に伴ってスクレーパ953も回転する。すると、スクレーパ953は受けドラム940上の粉粒体を下方のホッパ96に掃き落とし、ホッパ96に分配された粉粒体は製品として搬送されることになる。
【特許文献1】特開平4−126543号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかし、前述した分配装置900では、回転モータ961の稼動時のみならず非稼動時においても、貯留槽本体920内の粉粒体が受け板930から受けドラム940へと落下する。このように、貯留槽本体920内の粉粒体が恒常的に流失するため、粉粒体の無駄な損失や、流失した粉粒体の除去作業等が発生するという問題がある。
【0007】
本発明は、以上の実情に鑑みてなされたものであり、粉粒体の不必要な損失を低減できる粉粒体の分配装置及び分配方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明者らは、分配装置から受け板へと導出される粉粒体の堆積状態に着目し、本発明を完成するに至った。具体的には、本発明は以下のようなものを提供する。
【0009】
(1) 粉粒体を貯留し、下部に設けられた導出部から粉流体が導出される貯留槽と、
前記導出部の下方に所定間隔をあけて配置された受け板と、
前記導出部及び前記受け板を相対運動させる運動手段と、を備える粉粒体の分配装置であって、
前記受け板は、前記導出部の直下から外方へと延在し且つ外方に向かって所定角度で傾斜する緩斜部と、この緩斜部の内側に位置し外方に向かって前記所定角度を超える角度で傾斜する急斜部と、を有する分配装置。
【0010】
受け板の傾斜が大きいと、導出部から受け板へと導出された粉粒体が急角度で堆積するため、自然に崩落して恒常的に流失しやすくなる。
そこで(1)の発明によれば、導出部の直下から外方へと緩斜部を延在させたので、導出部及び受け板の間隙から漏出する粉粒体が受け板の外縁から自然落下するのが抑制される。これにより、分配を所望する場合には、運動手段を稼動して粉粒体に外力を負荷することで粉粒体を落下させる一方、分配停止を所望する場合には、運動手段の駆動力を抑制して粉粒体への外力の負荷を低減することで粉粒体の落下を抑制すればよい。このようにして、粉粒体の不必要な損失を低減できる。
【0011】
しかし、粉粒体同士又は粉粒体と貯留槽との間の摩擦力が大きいため、貯留された粉粒体が貯留槽内部で略固化し、受け板への落下が滞ることが懸念される(いわゆるブリッジ現象)。
そこで(1)の発明によれば、急斜部が貯留槽内部の粉粒体に突き刺さり、略固化するのを抑制する。これにより、粉粒体の受け板への落下がスムーズになり、粉粒体の分配量を正確に調節できる。
【0012】
なお、導出部及び受け板を相対運動させるとは、導出部及び受け板のいずれか一方又は双方を運動させることをいう。また、所定角度は、通常正の値が想定されるが、ゼロ又は負の値であってもよい。ただし、急斜部の傾斜角度は必ず正の値である。
【0013】
(2) 前記運動手段は、前記受け板を水平方向に運動させる水平運動手段を有する(1)記載の分配装置。
【0014】
運動手段によって運動させられる対象が導出部である場合、運動手段を稼動しても、導出部の外方へと延在する緩斜部上に堆積する粉粒体に対して、充分な外力を負荷することが困難である。
そこで(2)の発明によれば、水平運動手段を設けたので、受け板が水平方向に運動させられる。このため、水平運動手段を稼動すると、緩斜部上に堆積する粉粒体が遠心力によって受け板から落下する。よって、水平運動手段の駆動力を調整することで、粉粒体の分配量をより正確に調節できる。
【0015】
(3) 前記運動手段は、前記導出部の先端を移動させ、前記導出部の先端及び前記緩斜部の間隙を調節する間隙調節手段を有する(1)又は(2)記載の分配装置。
【0016】
(3)の発明によれば、導出部の先端及び緩斜部の間隙が調節され、緩斜部上に堆積する粉粒体量が所望の程度に制限される。このように、粉粒体の分配量をより正確に調節できる。
【0017】
なお、導出部及び緩斜部の間隙を調節するために、受け板(特に緩斜部)を上下動する構成も考えられる。しかし、この構成では、上下動の変わり目に生じる慣性力で、受け板上の粉粒体が不必要に落下するおそれがある。
そこで(3)の発明によれば、間隙調節手段を設けたので、導出部の先端が移動するため、粉粒体の不必要な損失を低減できる。
【0018】
(4) 前記受け板から落下する粉粒体量を一定時間ごとに測定する測定手段を更に備える(1)から(4)いずれか記載の分配装置。
【0019】
(4)の発明によれば、測定手段を設けたので、受けドラムに堆積された粉粒体の量が一定時間ごとに測定され、一定時間ごとに採取される。よって、この測定値に基づいて、受けドラム上に落下する粉粒体量を調節すれば、一定時間ごとに採取する粉粒体量が一定化する。従って、粉粒体の分配量をより正確に調節できる。
【0020】
なお、測定値に基づく受けドラム上への粉粒体落下量の調節は、自動制御されてもよいし、手作業による制御であってもよい。
【0021】
(5) 前記測定手段による測定値に基づいて、前記運動手段を駆動制御する制御手段を更に備える(4)記載の分配装置。
【0022】
分配量を調節するためには、受けドラム上に一定量が堆積した時点で粉粒体を採取するという構成も考えられる。しかし、受けドラムへの落下量が著しく低下した場合、採取時間が長期化するため、分配効率が悪い。
【0023】
そこで(5)の発明によれば、制御手段を設けたので、測定値が所定値と異なる場合には、増減手段を制御して受けドラムへの落下量が調節され、測定手段によって採取される粉粒体量が一定化する。よって、粉粒体の分配量を正確且つ迅速に調節できる。
【0024】
(6) 前記制御手段は、前記導出部及び前記受け板の相対運動の速度を変動制御する運動速度変動手段を有する(5)記載の分配装置。
【0025】
(6)の発明によれば、運動速度制御手段を設けたので、受けドラムへの落下量が運動速度の変動によって容易に調節される。よって、粉粒体の分配量を正確、迅速且つ容易に調節できる。
【0026】
(7) 粉粒体を貯留し、下部に設けられた導出部から粉流体が導出される貯留槽と、前記導出部の下方に所定間隔をあけて配置された受け板と、を備える分配装置を用いた粉粒体の分配方法であって、
水平方向に対して粉粒体の安息角をなす角度で前記導出部の先端から延びる仮想線が前記受け板と交差する状態が維持されるように、前記導出部及び前記受け板を相対運動させる運動手順を有する分配方法。
【0027】
(7)の発明によれば、安息角で堆積するすべての粉粒体が受け板上に堆積されるため、自然崩落が抑制され、不必要な粉粒体の損失を抑制できる。このような運動手順は、使用する粉粒体の種類に応じて、導出部及び受け板の相対運動の経路や速度等を適宜設定しつつ行えばよい。
【0028】
なお、安息角とは、粉粒体を積み上げたとき、自発的に崩れることなく安定を保つ場合の斜面の角度を指し、公知の装置を用いて測定される。
【0029】
(8) 前記受け板から落下する粉粒体量を一定時間ごとに測定する測定手順と、
前記測定手順での測定値に基づいて、前記導出部及び前記受け板の相対運動を調節する落下速度調節手順と、を更に有する(7)記載の分配方法。
【0030】
(8)記載の分配方法は、(5)記載の分配装置を分配方法として展開したものである。よって、(8)の発明によれば、(5)の発明と同様の効果が得られる。
【0031】
(9) 前記落下速度調節手順は、前記導出部及び前記受け板の相対運動の速度を変動させる運動速度変動手順を有する(8)記載の分配方法。
【0032】
(9)記載の分配方法は、(6)記載の分配装置を分配方法として展開したものである。よって、(9)の発明によれば、(6)の発明と同様の効果が得られる。
【発明の効果】
【0033】
本発明によれば、導出部の直下から外方へと緩斜部を延在させたので、導出部及び受け板の間隙から漏出する粉粒体が受け板の外縁から自然落下するのが抑制される。これにより、分配を所望する場合には、運動手段を稼動して粉粒体に外力を負荷することで粉粒体を落下させる一方、分配停止を所望する場合には、運動手段の駆動力を抑制して粉粒体への外力の負荷を低減することで粉粒体の落下を抑制すればよい。このようにして、粉粒体の不必要な損失を低減できる。
また、急斜部が貯留槽内部の粉粒体に突き刺さり、略固化するのを抑制する。これにより、粉粒体の受け板への落下がスムーズになり、粉粒体の分配量を正確に調節できる。
【発明を実施するための最良の形態】
【0034】
以下、本発明の実施形態について、図面を参照しながら説明する。なお、第1実施形態以外の各実施形態の説明において、第1実施形態と共通するものについては、同一符号を付し、その説明を省略する。
【0035】
<第1実施形態>
図1は、本発明の第1実施形態に係る分配装置10の概略構成図である。分配装置10は、貯留槽20と、受け板30と、受けドラム40とを備える。各構成要素について、以下詳細に説明する。
【0036】
〔貯留槽〕
粉粒体を貯留する貯留槽20は貯留槽本体21を備え、この貯留槽本体21はテーパ部23によって絞られている。テーパ部23の先端には開口部251が突設され、この開口部251の外周には側壁板253が摺動可能に設けられている。これら開口部251及び側壁板253は導出部25を構成し、この導出部25から粉粒体が導出される。
【0037】
また、開口部251及び側壁板253のより下方に位置するものの先端が導出部の先端を構成するところ、本明細書では側壁板253の下端255が導出部の先端に相当することになる。
【0038】
なお、本実施形態では、粉粒体の落下を促進するべくテーパ部23を設けたが、テーパ部23は必須ではない。
【0039】
〔受け板〕
受け板30は貯留槽20の下方に配置され、貯留槽20からの粉粒体を一時的に受ける。かかる受け板30は、緩斜部31と、この緩斜部31の内側に位置する急斜部33とを有する。緩斜部31は、少なくとも側壁板253の直下から外方(図1における左右方向)へと延在し、外方に向かって所定角度aで傾斜する。また、急斜部33は、外方に向かって所定角度aを超える角度bで傾斜する。
【0040】
〔受けドラム〕
受けドラム40は受け板30の下方に配置された平板体であって、受け板30からの粉粒体を受ける。受けドラム40は、特に限定されないが、後述の延出部532との関係で摩擦力の低い素材で構成されることが好ましく、かかる素材としては「テフロン(登録商標)」で加工された鋼板等が挙げられる。
【0041】
分配装置10は採取部53を更に備える。この採取部53はピストン531を有し、このピストン531は延出部532を水平方向に進退させる。延出部532には彗部533が設けられ、この彗部533は受けドラム40と略接触しながら、受けドラム40上を摺動する。
【0042】
図2は採取部53の使用状態を示す図である。受けドラム40上には受け板30から落下した粉粒体が堆積されている(図2(A))。ここで、ピストン531が稼動すると、延出部532が水平方向に進行し、彗部533が受けドラム40上の粉粒体を寄せ集める(図2(B))。更に延出部532が水平方向に進行すると、受けドラム40上に堆積した粉粒体は図示しないホッパに振り落とされ、製品化される。この動きを反復することで、受けドラム40上の粉粒体を採取することになる。
【0043】
〔運動部〕
図1に戻って、分配装置10は運動手段としての運動部60を更に備える。この運動部60は回転モータ61を有し、この回転モータ61に設けられた回転軸63は軸受65及び偏心カム64を介して受け板30に連結されている。軸受65は受け板30の中央から偏りhだけずれているため、回転モータ61が稼動すると、回転軸63の回転に伴って受け板30が水平方向に円運動することになる。すると、受け板30上の粉粒体が水平方向に揺動され、受けドラム40へと落下しやすくなる。以上の回転モータ61、回転軸63、偏心カム64、及び軸受65は水平運動手段を構成する。
【0044】
また、運動部60は間隙調節手段としての側壁ピストン66を更に備え、この側壁ピストン66には前述の側壁板253が接続されている。この側壁板253を上下動させることで、下端255及び緩斜部31の間隙が調節され、緩斜部31上に堆積する粉粒体量が所望の程度に制限されることになる。
【0045】
なお、本実施形態では、側壁板67が上下動する構成としたが、水平移動して側壁板253及び緩斜部31の間隙を拡大又は絞るように構成してもよい。
【0046】
〔使用方法〕
以上の分配装置10の使用方法を説明する。
【0047】
まず、粉粒体を貯留槽20に供給する。すると、粉粒体は導出部25から下方の受け板30へと落下する。落下した粉粒体は下端255から受け板30へと末広がりに堆積する。ここで、安息角Θよりも小さい角度aで傾斜する緩斜部31が外方まで延在しているため、粉粒体は安息角Θの傾斜を有する円錐を形成して、緩斜部31上に留まることになる。
【0048】
ここで、回転モータ61を稼動する。すると、受け板30が水平方向に円運動する結果、緩斜部31上の粉粒体に遠心力が負荷される。これにより、緩斜部31上に堆積した粉粒体は外方に振り落とされ、下方の受けドラム40へと落下する。
【0049】
このとき、偏りhを調節することで、水平方向Hに対して粉粒体の安息角Θをなす角度で下端255から延びる仮想線V1,V2が受け板30と交差する状態が維持されている(運動手順)。このため、導出部25から導出された粉粒体が緩斜部31から下方へと自然に落下することは抑制され、粉粒体の落下量は、粉粒体に負荷される外力に依存することになる。つまり、回転モータ61の回転速度が増減すると、受けドラム40への粉粒体の落下量も増減する。
【0050】
このようにして受けドラム40上に堆積した粉粒体は、ピストン531を稼動すると、彗部533によって図示しないホッパに振り落とされ、製品化される。
【0051】
(分配量)
図3は、分配装置10を用いたときの、粉粒体の単位時間当たり分配量の変化を示す図である。図3における実線は分配装置10を用いた場合の粉粒体の分配量を指し、点線は従来の分配装置900を用いた場合の粉粒体の分配量を指す。
【0052】
従来の分配装置900では、粉粒体を貯留槽本体920に供給するや否や、粉粒体が受け板930から自然落下するため、恒常的にM0量の損失が観測される。その後、回転モータ961を稼動して分配を開始すると、分配量が増加し、粉粒体はM2量で分配される。やがて、回転モータ961を停止すると、分配量は徐々に低下し始めるも、M0量までしか低下せず、上記と同様に恒常的にM0量の損失が観測されることになる。
【0053】
これに対して、分配装置10では、粉粒体を貯留槽20に供給しても、ほぼすべての粉粒体が緩斜部31上に留まるため、粉粒体の損失がほとんど観測されない。その後、回転モータ61を稼動して分配を開始すると、分配量が増加し、粉粒体はM1量で分配される。やがて、回転モータ61を停止すると、粉粒体は、遠心力の負荷がなくなるため、自然落下せずに緩斜部31上に留まる。これにより、分配量は、回転モータ61の停止と同時にほぼゼロにまで急低下することになる。
【0054】
[作用効果]
本実施形態によれば、以下のような作用効果が得られる。
【0055】
下端255の直下から外方へと緩斜部31を延在させたので、下端255及び受け板30の間隙から漏出する粉粒体が受け板30の外縁から自然落下するのが抑制される。これにより、分配を所望する場合には、回転モータ61を稼動して粉粒体に外力を負荷することで粉粒体を落下させる一方、分配停止を所望する場合には、回転モータ61の駆動力を抑制して粉粒体への外力の負荷を低減することで粉粒体の落下を抑制すればよい。このようにして、粉粒体の不必要な損失を低減できる。
また、急斜部33が貯留槽20内部の粉粒体に突き刺さり、略固化するのを抑制する。これにより、粉粒体の受け板30への落下がスムーズになり、粉粒体の分配量を正確に調節できる。
【0056】
回転モータ61を設けたので、受け板30が水平方向に運動させられる。このため、回転モータ61を稼動すると、緩斜部31上に堆積する粉粒体が遠心力によって受け板30から落下する。よって、回転モータ61の駆動力を調整することで、粉粒体の分配量をより正確に調節できる。
【0057】
側壁ピストン66を設けたので、下端255及び緩斜部31の間隙が調節され、緩斜部31上に堆積する粉粒体量が所望の程度に制限される。このように、粉粒体の分配量をより正確に調節できる。また、受け板30ではなく下端255が移動するため、粉粒体の不必要な損失を低減できる。
【0058】
<第2実施形態>
図4は、本発明の第2実施形態に係る分配装置10Aの概略構成図である。本実施形態は、測定部50及び制御部70を備える点において第1実施形態と異なる。
【0059】
〔測定部〕
測定部50はロードセル51を備える。このロードセル51は受けドラム40の下面に設けられ、受けドラム40上に堆積した粉粒体量を一定時間ごとに測定し、測定値を制御手段としての制御部70に送信する。具体的には、受け板30の外周縁の下方に位置するよう、複数個配置されている。なお、ロードセル51の測定機構は、例えば、内部に有するブリッジ回路の抵抗値の変化に基づいて、受けドラム40上の粉粒体量を測定するものである。
【0060】
〔制御部〕
制御部70は、ロードセル51から受信した測定値に基づいて、側壁ピストン66及び回転モータ61を駆動制御する。具体的には、測定値が所望の値よりも小さいときは、側壁板253が上方向に移動するように側壁ピストン66を制御し、受け板30の円運動速度が増すように回転モータ61の出力を増加させる。一方、測定値が所望の値よりも大きいときは、側壁板253が下方向に移動するように側壁ピストン66を制御し、受け板30の円運動速度が減るように回転モータ61の出力を低下させる。ただし、制御は特に限定されず、種々の方式であってよい。制御部70が有する運動速度制御手段による制御例を以下に説明する。
【0061】
図5は、制御部70による回転モータ61の駆動制御の一例を示すタイミングチャートである。(A)が受けドラム40上に堆積した粉粒体質量の経時的変化を示し、彗部533の往復時間(t1)ごとに受けドラム40上の粉粒体量を測定した結果に基づく。一方、(B)は回転モータ61による偏心カム64の回転数の経時的変化を示す。
【0062】
ここでは、分配期間T1内に分配される粉粒体量を600Mに一定化するための制御を説明する。まず2t1〜3t1の区間において、何らかの理由により、受けドラム40上に堆積した粉粒体量が100Mから103Mに増加している。この測定値をロードセル51から受信した制御部70は、偏心カム64の回転数がr1からr2に低下するように回転モータ61を駆動制御する。これにより、3t1〜4t1の区間における受けドラム40上の粉粒体質量が98Mまで低下する。
【0063】
すると、98Mという測定値を受信した制御部70は、期間T1での総分配量が600Mとなるよう計算し、4t1〜5t1の区間の途中で偏心カム64の回転数がr2からr3に上昇するように回転モータ61を駆動制御する。これにより、4t1〜5t1の区間における受けドラム40上の粉粒体質量が99Mまで増加する。そして、この状態を持続することで、期間T1での総分配量が600Mとなる。
【0064】
図4は、制御部70による回転モータ61の駆動制御の別の例を示すタイミングチャートである。(A)が受けドラム40上に堆積した粉粒体質量の経時的変化を示し、彗部533の往復時間(t1)ごとに受けドラム40上の粉粒体量を測定した結果に基づく。一方、(B)は回転モータ61による偏心カム64の回転数の経時的変化を示す。
【0065】
ここでは、往復時間t1内に分配される粉粒体量を100Mに一定化するための制御を説明する。まずt1〜2t1の区間において、何らかの理由により、受けドラム40上に堆積した粉粒体量が100Mから103Mに増加している。この測定値をロードセル51から受信した制御部70は、偏心カム64の回転数を急速にr1からr2に低下させ、次にr3まで上昇させる。これにより、次区間である2t1〜3t1における受けドラム40上の粉粒体質量が100Mに戻る。そしてこの状態を持続することで、3t1〜4t1の区間における受けドラム40上の粉粒体質量も100Mに維持される。
【0066】
しかし、4t1〜5t1の区間において、何らかの理由により、受けドラム40上に堆積した粉粒体量が100Mから99Mに低下している。この測定値をロードセル51から受信した制御部70は、偏心カム64の回転数を急速にr3からr4に上昇させ、次にr4まで低下させる。これにより、次区間である5t1〜6t1における受けドラム40上の粉粒体質量が100Mに戻る。そしてこの状態を持続することで、6t1以降の区間における受けドラム40上の粉粒体質量も100Mに維持されることになる。
【0067】
このように、往復期間と分配期間との関係等に応じて、制御の方式は一定の分配量が得られるよう適宜設定されてよい。
【0068】
[作用効果]
本実施形態によれば、前述した第1実施形態に加えて、以下の作用効果が得られる。
【0069】
測定部50を設けたので、受けドラム40に堆積された粉粒体の量が一定時間ごとに測定され、一定時間ごとに採取される。よって、この測定値に基づいて、受けドラム40上に落下する粉粒体量を調節すれば、一定時間ごとに採取する粉粒体量が一定化する。従って、粉粒体の分配量をより正確に調節できる。
【0070】
制御部70を設けたので、測定値が所定値と異なる場合には、回転モータ61及び側壁ピストン66を制御して受けドラム40への落下量が調節され、測定部50によって採取される粉粒体量が一定化する。よって、粉粒体の分配量を正確且つ迅速に調節できる。
【0071】
受けドラム40への落下量が運動速度の変動によって容易に調節される。よって、粉粒体の分配量を正確、迅速且つ容易に調節できる。
【0072】
<第3実施形態>
図7は、本発明の第3実施形態に係る分配装置10Bの概略構成図である。図8は図7のVIII−VIII線断面図である。本実施形態は、集約部85及びフィルタ80が設けられている点において第2実施形態と異なる。
【0073】
即ち、分配装置10Bは漏斗状の集約部85を更に備え、この集約部85の大開口が受け板30の下方に、小開口が受けドラム40Bの上方に位置する。大開口は受け板30よりも大きく形成されており、それによって形成された受け板30及び集約部85の隙間にはフィルタ80が介在する。これにより、受け板30から落下した粉粒体はフィルタ80でろ過されて塊(ダマ)を除かれる。
【0074】
集約部85は水平方向に対して角度αだけ内方に傾斜しており、フィルタ80を通過した粉粒体は集約部85の内部を滑って小開口から受けドラム40Bへと落下することになる。受けドラム40Bは小開口よりも若干大きく構成されており、受けドラム40B上に堆積した粉粒体は採取部53Bの稼動によって、図示しないホッパに振り落とされる。
【0075】
図8は、採取部53Bの使用状態を示す図である。採取部53Bは、受けドラム40B上に立設された回転部531Bを有し、この回転部531Bを中心としてワイパ532Bが受けドラム40B上を水平方向に回転運動する。
【0076】
受けドラム40B上には小開口から落下した粉粒体が堆積されている(図8(A))。回転部531Bが稼動すると、延出部532が水平方向に回転する。ここで、ワイパ532Aの側面は湾曲しているので、ワイパ532Bが受けドラム40B上の粉粒体を寄せ集める(図8(B))。更にワイパ532Bが回転すると、受けドラム40B上に堆積した粉粒体は図示しないホッパに振り落とされ、製品化される。この動きを反復することで、一定時間ごとに粉粒体を採取することになる。
【0077】
[作用効果]
本実施形態によれば、前述した第2実施形態に加えて、以下の作用効果が得られる。
【0078】
集約部85を更に設けたので、受け板30から落下した粉粒体は大開口から集約部85内部に侵入し、内部を滑って小開口から集約して放出される。よって、放出される粉粒体を受け止める受けドラム40Bを小型化でき、これに伴って測定部50を小型化したり、部品点数を削減したりすることができる。
【0079】
受け板30及び集約部85の間にフィルタ80を設けたので、粉粒体に混在する塊(ダマ)が除去される。このため、フィルタ80を通過し、やがて分配される粉粒体を均質化できる。
【0080】
〔変形例〕
本発明は前記実施形態に限定されるものではなく、本発明の目的を達成できる範囲での変形、改良等は本発明に含まれるものである。
【0081】
例えば、前記実施形態では、受け板を緩斜部及び急斜部のみで構成したが、これに限られず、内方に向かって傾斜する部材(せき止め部)も受け板が備える構成であってもよい。具体的には、図9(A)に示されるように、せき止め部35が緩斜部31の外側に位置してよい。かかる構成によれば、せき止め部35で粉粒体がせき止められるので、不必要な粉粒体の損失をより抑制できる。
【0082】
また、前記実施形態では、角度aを正の値としたが、負の値であってもよい。また、図9(B)に示されるように、緩斜部31Dは略水平に配置されてよい。
【0083】
前記実施形態では、角度a,bの各々を一定値としたが、角度aよりも角度bが大きい関係が維持される限りにおいて特に限定されず、角度a,bの一方又は双方を順次変化させてもよい。具体的には、図9(C)に示されるように、緩斜部31E及び急斜部33Eが滑らかに湾曲してよい。
【0084】
また、受け板の形状は、本実施形態では傘状としたが、これに限られない。例えば、平板体の中心に棒状体が突設された構成であってもよい。
【図面の簡単な説明】
【0085】
【図1】本発明の第1実施形態に係る分配装置の概略構成図である。
【図2】前記実施形態に係る分配装置を構成する測定手段の使用状態を示す図である。
【図3】前記実施形態に係る分配装置を用いたときの、粉粒体の単位時間当たり分配量の変化を示す図である。
【図4】本発明の第2実施形態に係る分配装置の概略構成図である。
【図5】前記実施形態に係る分配装置を構成する制御手段による増減手段の駆動制御の一例を示すタイミングチャートである。
【図6】前記実施形態に係る分配装置を構成する制御手段による増減手段の駆動制御の別の例を示すタイミングチャートである。
【図7】本発明の第3実施形態に係る分配装置の概略構成図である。
【図8】前記実施形態に係る分配装置を構成する測定手段の使用状態を示す図である。
【図9】本発明の変形例に係る受け板の概略構成図である。
【図10】従来例に係る分配装置の概略構成図である。
【符号の説明】
【0086】
10、10A、10B 分配装置
20 貯留槽
25 導出部
251 開口部
253 側壁板
255 下端(先端)
30、30C、30D、30E 受け板
31、31D、31E 緩斜部
33、33E 急斜部
35 せき止め部
50 測定部(測定手段)
60 運動部(運動手段)
61 回転モータ(水平運動手段)
63 回転軸(水平運動手段)
64 偏心カム(水平運動手段)
65 軸受(水平運動手段)
66 側壁ピストン(間隙調節手段)
70 制御部(制御手段、運動速度変動手段)
【特許請求の範囲】
【請求項1】
粉粒体を貯留し、下部に設けられた導出部から粉流体が導出される貯留槽と、
前記導出部の下方に所定間隔をあけて配置された受け板と、
前記導出部及び前記受け板を相対運動させる運動手段と、を備える粉粒体の分配装置であって、
前記受け板は、前記導出部の直下から外方へと延在し且つ外方に向かって所定角度で傾斜する緩斜部と、この緩斜部の内側に位置し外方に向かって前記所定角度を超える角度で傾斜する急斜部と、を有する分配装置。
【請求項2】
前記運動手段は、前記受け板を水平方向に運動させる水平運動手段を有する請求項1記載の分配装置。
【請求項3】
前記運動手段は、前記導出部の先端を移動させ、前記導出部の先端及び前記緩斜部の間隙を調節する間隙調節手段を有する請求項1又は2記載の分配装置。
【請求項4】
前記受け板から落下する粉粒体量を一定時間ごとに測定する測定手段を更に備える請求項1から3いずれか記載の分配装置。
【請求項5】
前記測定手段による測定値に基づいて、前記運動手段を駆動制御する制御手段を更に備える請求項4記載の分配装置。
【請求項6】
前記制御手段は、前記導出部及び前記受け板の相対運動の速度を変動制御する運動速度変動手段を有する請求項5記載の分配装置。
【請求項7】
粉粒体を貯留し、下部に設けられた導出部から粉流体が導出される貯留槽と、前記導出部の下方に所定間隔をあけて配置された受け板と、を備える分配装置を用いた粉粒体の分配方法であって、
水平方向に対して粉粒体の安息角をなす角度で前記導出部の先端から延びる仮想線が前記受け板と交差する状態が維持されるように、前記導出部及び前記受け板を相対運動させる運動手順を有する分配方法。
【請求項8】
前記受け板から落下する粉粒体量を一定時間ごとに測定する測定手順と、
前記測定手順での測定値に基づいて、前記導出部及び前記受け板の相対運動を調節する落下速度調節手順と、を更に有する請求項7記載の分配方法。
【請求項9】
前記落下速度調節手順は、前記導出部及び前記受け板の相対運動の速度を変動させる運動速度変動手順を有する請求項8記載の分配方法。
【請求項1】
粉粒体を貯留し、下部に設けられた導出部から粉流体が導出される貯留槽と、
前記導出部の下方に所定間隔をあけて配置された受け板と、
前記導出部及び前記受け板を相対運動させる運動手段と、を備える粉粒体の分配装置であって、
前記受け板は、前記導出部の直下から外方へと延在し且つ外方に向かって所定角度で傾斜する緩斜部と、この緩斜部の内側に位置し外方に向かって前記所定角度を超える角度で傾斜する急斜部と、を有する分配装置。
【請求項2】
前記運動手段は、前記受け板を水平方向に運動させる水平運動手段を有する請求項1記載の分配装置。
【請求項3】
前記運動手段は、前記導出部の先端を移動させ、前記導出部の先端及び前記緩斜部の間隙を調節する間隙調節手段を有する請求項1又は2記載の分配装置。
【請求項4】
前記受け板から落下する粉粒体量を一定時間ごとに測定する測定手段を更に備える請求項1から3いずれか記載の分配装置。
【請求項5】
前記測定手段による測定値に基づいて、前記運動手段を駆動制御する制御手段を更に備える請求項4記載の分配装置。
【請求項6】
前記制御手段は、前記導出部及び前記受け板の相対運動の速度を変動制御する運動速度変動手段を有する請求項5記載の分配装置。
【請求項7】
粉粒体を貯留し、下部に設けられた導出部から粉流体が導出される貯留槽と、前記導出部の下方に所定間隔をあけて配置された受け板と、を備える分配装置を用いた粉粒体の分配方法であって、
水平方向に対して粉粒体の安息角をなす角度で前記導出部の先端から延びる仮想線が前記受け板と交差する状態が維持されるように、前記導出部及び前記受け板を相対運動させる運動手順を有する分配方法。
【請求項8】
前記受け板から落下する粉粒体量を一定時間ごとに測定する測定手順と、
前記測定手順での測定値に基づいて、前記導出部及び前記受け板の相対運動を調節する落下速度調節手順と、を更に有する請求項7記載の分配方法。
【請求項9】
前記落下速度調節手順は、前記導出部及び前記受け板の相対運動の速度を変動させる運動速度変動手順を有する請求項8記載の分配方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2009−96572(P2009−96572A)
【公開日】平成21年5月7日(2009.5.7)
【国際特許分類】
【出願番号】特願2007−267677(P2007−267677)
【出願日】平成19年10月15日(2007.10.15)
【出願人】(000251211)冷化工業株式会社 (20)
【Fターム(参考)】
【公開日】平成21年5月7日(2009.5.7)
【国際特許分類】
【出願日】平成19年10月15日(2007.10.15)
【出願人】(000251211)冷化工業株式会社 (20)
【Fターム(参考)】
[ Back to top ]