
列車制御システム
【課題】波状摩耗が発生しやすい区間である加速、減速区間や曲線区間において、通過する列車の速度を分散させることにより、削正装置等を使用することなく、この区間における波状摩耗の成長を確実に抑制する。
【解決手段】軌道を走行する列車を支援あるいは制御する列車制御システムにおいて、列車制御システムは、前記軌道のうち波状摩耗の生じやすい区間を特定し、該区間における列車の速度分布が分散するように各列車に対する速度パターンを生成し、前記走行速度パターンに基づき運転士への支援情報あるいはノッチ指令を決定する。
【解決手段】軌道を走行する列車を支援あるいは制御する列車制御システムにおいて、列車制御システムは、前記軌道のうち波状摩耗の生じやすい区間を特定し、該区間における列車の速度分布が分散するように各列車に対する速度パターンを生成し、前記走行速度パターンに基づき運転士への支援情報あるいはノッチ指令を決定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、列車走行を制御する列車制御システムに関する。
【背景技術】
【0002】
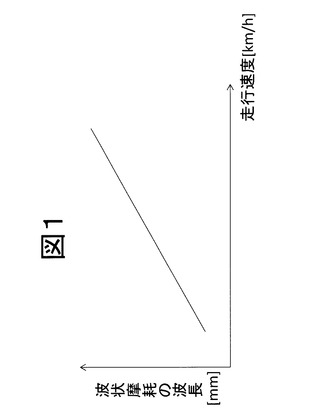
加速、減速区間や曲線区間のレールには、波状摩耗と呼ばれる波状の摩耗が発生し、列車走行時の騒音や振動の原因となっていた。この問題に対し、下記特許文献1では、削正装置を用いて波状摩耗を削正する方法を提案している。また、下記特許文献2では、車輪とレールとの間に摩擦調整剤を介在させ、摩擦係数をコントロールすることで、波状摩耗の発生を予防する方法を提案している。下記非特許文献1では、波状摩耗の波長と列車の走行速度は図1のように比例関係にあることを実験で明らかにしている。また、同文献には、変形前の波状摩耗の波形と、その後、レールによって削られる変形量の位相差が90度以上であれば、波状摩耗が成長しないことが示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平10−195805号公報
【特許文献2】特開2001−151104号公報
【非特許文献】
【0004】
【非特許文献1】「波状摩耗のメカニズム」(鉄道列車と技術 No.95)
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記特許文献1の削正装置でレールを削正することで、列車走行時の騒音や振動を防止できる。しかしながら、列車の営業時間外に削正装置を使ってレールを削正する必要があるため、メンテナンスに掛かる労力、コストが大きいという課題があった。
また、特許文献2に示す摩擦調整剤では、波状摩耗を防止することができる。しかし、新たに摩擦調整剤の噴射装置が必要であることと、列車が走行する度に摩擦調整剤を噴射する必要があるため高コストで環境に与える影響が課題となっていた。
【0006】
また、非特許文献1には、前述のように、変形前の波状摩耗の波形とレールによって削られる変形量の位相差が90度以上であれば、波状摩耗の成長を抑制できることが示されているが、波状摩耗は、一般的にレールの継ぎ目などを起点にして発生することが知られているため、波状摩耗が発生する起点自体をずらすことにより、波状摩耗の位相を90度以上ずらすことはできない。
【課題を解決するための手段】
【0007】
そこで、この課題を解決するため、本発明は、波状摩耗が発生しやすい区間を通過した列車の速度分布が分散するように、列車の速度パターンを決定する列車制御システムを提供する。より具体的には、
(1)軌道を走行する列車を支援あるいは制御する列車制御システムにおいて、前記列車制御システムは、前記軌道のうち波状摩耗の生じやすい区間を特定し、該区間における列車の速度分布が分散するように各列車に対する速度パターンを生成する。
【0008】
(2)前記の列車制御システムにおいて、前記走行速度パターンに基づき運転士への支援情報として推奨走行速度、推奨ノッチ、推奨加速度のいずれかを表示する。
【0009】
(3)前記の列車制御システムにおいて、前記速度パターンに基づきノッチ指令を決定し,該ノッチ指令に基づき列車を自律的に制御する。
【0010】
(4)前記の列車制御システムにおいて、列車の制限速度を表示する可変速度標識をさらに備え、前記可変速度標識が前記速度パターンに基づき制限速度を変更する。
【0011】
(5)前記の列車制御システムにおいて、前記列車制御システムが、前記列車の位置及び速度情報に基づいて前記波状摩耗の生じやすい区間における列車の速度分布を積算することにより更新し、更新した速度分布に基づいて、該区間における列車の速度分布が分散するように、各列車に対する前記速度パターンを生成する。
【0012】
(6)前記の列車制御システムにおいて、前記列車制御システムが、波状摩耗の生じやすい区間において、該区間を通過する各列車の速度分布が分散するように、予め各列車に対する前記速度パターンを生成する。
【0013】
(7)前記の列車制御システムにおいて、前記列車が速度センサ及び加速度センサを備え、前記列車制御システムが、通過した区間における列車の位置情報、速度情報及び加速度情報に基づいて、当該区間における波状摩耗の進行状況を推定し、推定した波状摩耗の進行状況に基づいて、該区間における列車の速度分布が分散するように各列車に対する前記速度パターンを生成する。
【0014】
(8)前記の列車制御システムにおいて、前記列車が、軌道走行時の発生音を収集するマイクロフォンと該発生音を解析する解析装置とからなる波状摩耗検出装置を有し、前記地上システムが前記波状摩耗検出装置の検出値に基づき、波状摩耗の生じやすい区間を特定する。
【発明の効果】
【0015】
本発明によれば、波状摩耗が発生しやすい区間である加速、減速区間や曲線区間において、通過する列車の速度を分散させることができ、これにより、図1に示す関係から、波状摩耗の波長を分散させることができ、その結果、この区間を列車が同じ速度で通過する場合と比較して、波状摩耗の成長を確実に抑制することが可能となる。
【図面の簡単な説明】
【0016】
【図1】列車走行速度と波状摩耗の波長の関係を示す図。
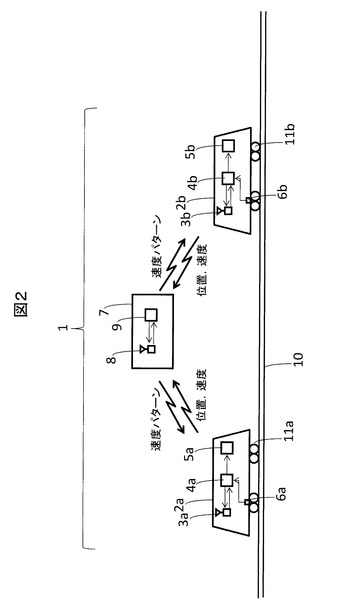
【図2】実施例1において前提とする列車制御システムを示す図。
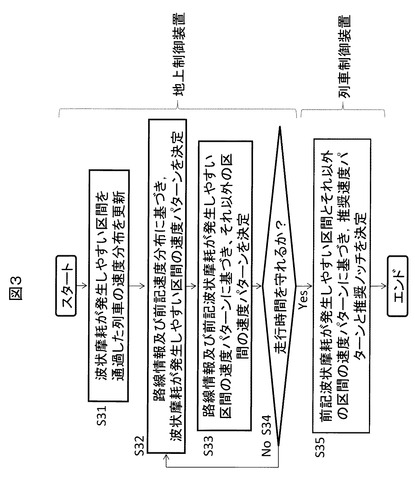
【図3】実施例1における列車制御システムのフローチャートを示す図。
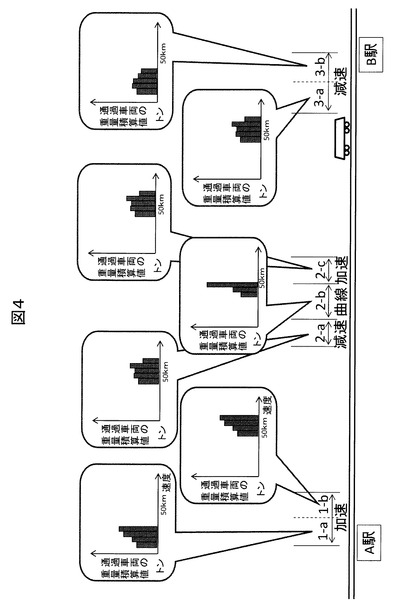
【図4】実施例1における波状摩耗が発生しやすい区間の速度分布を示す図。
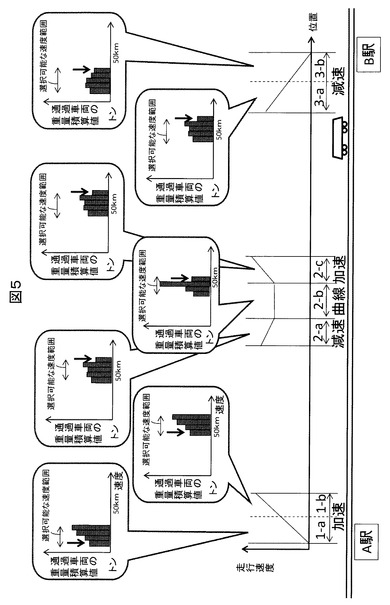
【図5】実施例1における波状摩耗が発生しやすい区間での速度パターン決定方法を示す図。
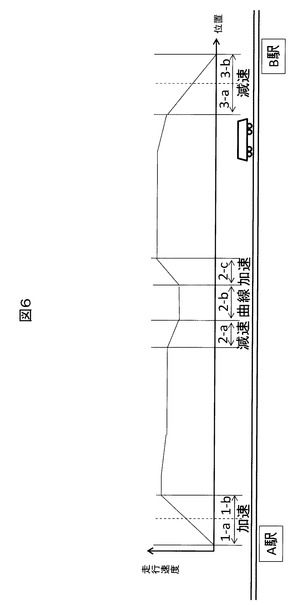
【図6】実施例1における波状摩耗が発生しやすい区間以外での速度パターン決定方法を示す図。
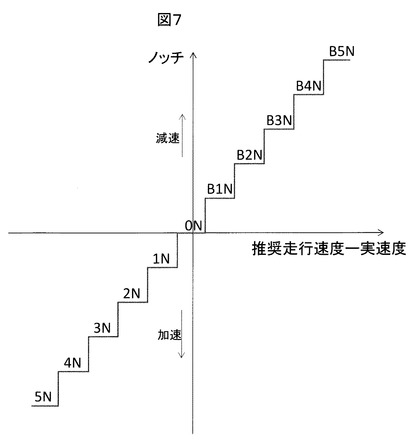
【図7】実施例1における推奨ノッチの決定方法を示す図。
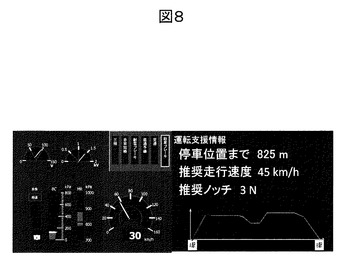
【図8】実施例1における運転支援装置による支援情報を示す図。
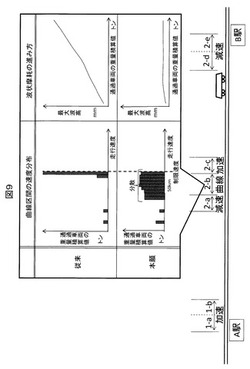
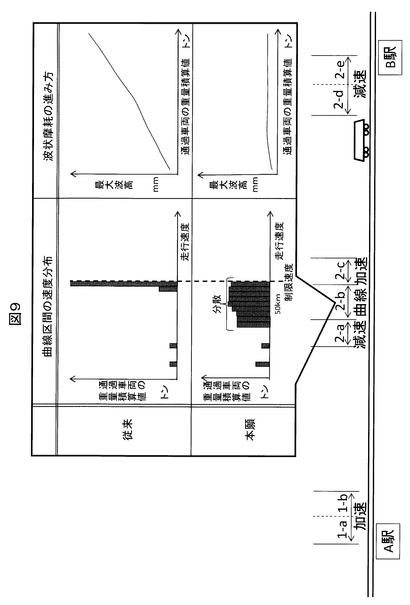
【図9】実施例1における曲線区間での波状摩耗の進み方を示す図。
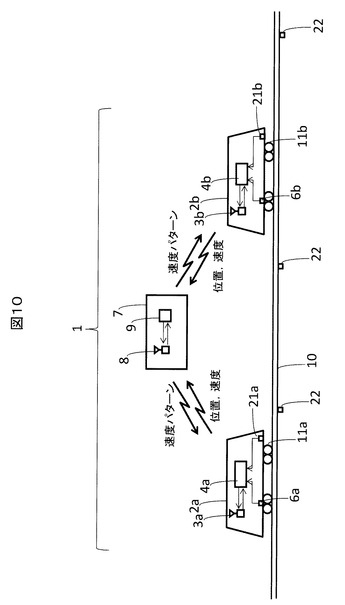
【図10】実施例2における列車制御システムの構成を示す図。
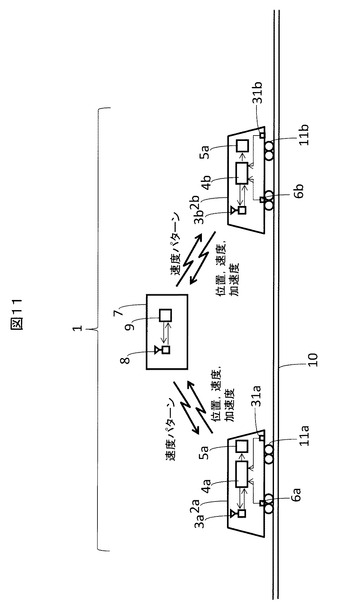
【図11】実施例3における列車制御システムの構成を示す図。
【図12】実施例3における列車制御システムのフローチャートを示す図。
【図13】実施例3における波状摩耗の推定値を示す図。
【図14】実施例4における列車制御システムの構成を示す図。
【図15】実施例4における列車制御システムのフローチャートを示す図。
【図16】実施例4における各グループに割り当てられた速度パターンを示す図。
【図17】実施例5における列車制御システムの構成を示す図。
【図18】実施例6における列車制御システムの構成を示す図。
【発明を実施するための形態】
【0017】
以下、本発明の実施例を図面に基づいて説明する。
【実施例】
【0018】
[実施例1]
図2は実施例1の列車制御システム1の全体構成を示す。列車制御システム1は、地上システム7と複数の列車(2a、2b・・・)で構成される。ここでは簡単のため列車2aを用いて説明し、列車2bの説明は省略する。列車2aは、地上システム7と通信するための通信装置3aと、列車制御装置4aと、運転士への支援情報を表示する運転支援装置5aと、列車の走行速度を検出する速度検出装置6aと、図示しない架線から供給される電力を集電するための図示しないパンタグラフと、パンタグラフからの電力で列車2aを駆動する図示しないモータと、このモータの交流電力を生成する図示しないインバータと、このインバータを制御する図示しない駆動制御装置と、モータで発生した力をレール10に伝える車輪11aから構成される。地上システム7は、列車2aと通信するための通信装置8と、地上制御装置9とで構成される。
【0019】
列車制御装置4aは、通信装置3aを介して、速度パターンを地上システム7から受信し、自車の位置及び速度を地上システム7に送信する。列車制御装置4aは、速度パターン及び速度検出装置6aで検出した速度に基づき、運転士への支援情報を決定し、前記運転支援装置5aへ送信し、この運転支援装置5aが、運転士への支援情報を表示する。なお、地上システム7へ送信する自車位置は、この速度に基づき算出する。但し、GPSや地上子などで補正してもよい。
地上制御装置9は、通信装置8を介して、各列車の位置及び速度情報を受信する。詳細は後述するが、地上制御装置9は、各列車の前記列車の位置及び速度情報に基づき、波状摩耗が発生しやすい区間の列車の速度分布を逐次更新する。
【0020】
地上制御装置9は、速度分布及び路線情報(制限速度、走行時間等)に基づき、各列車の速度パターンを生成し、通信装置8を介して、列車の速度パターンを列車2aに送信する。
実施例1における列車制御システムで行う処理のフローチャートを図3に示す。
一般に波状摩耗が発生しやすい区間とは、列車速度が変化する加速区間(特に急勾配の加速区間)、減速区間、曲線区間である。ステップS31にて、地上制御装置9は、列車2aより受信した波状摩耗が発生しやすい区間を通過した時の位置及び速度に基づき、図4のような波状摩耗が発生しやすい区間を通過した列車の速度分布を更新する。
【0021】
速度分布は、図4に示すように横軸が列車速度で、縦軸が通過した列車重量の積算値のグラフで、区間ごとに速度分布を保存することができる。ただし、縦軸はこれに限定するものではなく、その路線を運行する列車の重量が大きく変動しないような場合は、列車の通過列車数等で列車重量に代用してもよい。速度分布を保存する区間は、細かく分割した方がより速度分布履歴の精度が上がり、波状摩耗の成長を抑制しやすくなる。
【0022】
次に、ステップS32にて、地上制御装置9は、図5に示すように路線情報及び積算した速度分布に基づき波状摩耗が発生しやすい区間の速度パターンを決定する。
すなわち、列車がA駅を発車し、次のB駅に到着するまでの走行を考えると、区間1−a、区間1−bが加速区間、区間2−aから区間2−cのうち、区間2−aが区間2−bの曲線区間に伴う減速区間、区間2−bが曲線区間、区間2−cが曲線区間走行後の加速区間、そして、区間3−a、区間3−bがB駅停車のための減速区間となる。これら区間1−a、区間1−b、区間2−aから区間2−c、区間3−a、区間3−bが、波状摩耗の生じやすい区間として予め設定する。
【0023】
ステップS32では、図4に示す、横軸が列車速度で縦軸が通過した列車重量の積算値のグラフに基づき、地上制御装置9は、特定の列車に対し、区間1−aでは、図5の矢印で示す、最も列車重量の積算値が最も小さい、左端の最低速度域を選択して速度パターンを与える。同様に、それぞれの区間で、矢印で示す、最も列車重量の積算値が小さい速度を選択するように、速度パターンを決定すれば、最終的には、列車速度に対し列車重量の積算値を平準化することが可能になる。
【0024】
なお、ステップS32で、適切でない速度パターンを設定すると、走行時間(運行時間)を維持できなく可能性があることから、走行時間が維持できなくなるような極端な速度パターンを生成しないように、選択できる速度にある一定の速度範囲を設定し、この範囲か選択するようにするとよい。すなわち、地上制御装置9は、各列車の駅A−駅B間の運行時間が予め定めたダイアグラムとおりとなり、しかも、その間、極端な加減速が発生しないよう、これらの区間以外での速度パターンも考慮して、所定の幅で速度パターンを選定することが好ましい。
幅の持たせ方は、例えば、制限速度及び走行時間に基づいて、省エネになる一般的な速度パターンを設定し、その速度パターンに一定の速度範囲を設定するとよい。
【0025】
このように設定した速度範囲の中で、地上制御装置9は、図5に示すような速度分布の決定により、波状摩耗が発生しやすい区間を通過する列車の速度分布が分散するように速度パターンを生成する。なお、列車の速度分布は、1時間や1日の単位で分散している必要はなく、波状摩耗が成長するより前に(例えば、レールを走行した列車重量の積算値が200万トン以内に)で分散していればよい。
【0026】
次に、ステップS33にて、地上制御装置9は、図6に示すように路線情報及び前記波状摩耗が発生しやすい区間の速度パターンに基づき、それ以外の区間の速度パターンを決定する。具体的には、できるだけ走行時間を守るように前記波状摩耗が発生しやすい区間の速度パターンを結ぶ。
続いて、ステップS34にて、列車制御装置4aは、ステップS32〜33で決定した速度パターンで走行時間を維持できるか否か判断する。すなわち、例えば、加速区間である区間1−a、1−bで、低速の速度パターンを指示した場合、B駅に到るまでの区間において、区間1−a、1−bで生じた遅れを、所定の微少速度範囲で相殺できる程度のものであるか否かを判断する。
【0027】
維持できない場合は、ステップS32、ステップS33で走行時間が維持できるように、速度パターンを修正する。維持できる場合は、ステップS35に進み、列車制御装置4aが、速度パターンを地上制御装置から受信し、運転士への支援情報として推奨速度パターンと推奨ノッチを生成する。
【0028】
推奨速度パターンは、ステップS31〜ステップS34で求めた速度パターンそのものである。推奨ノッチは、図7に示すように、推奨走行速度と実速度の偏差より決定する。偏差が正の場合(速度が速すぎる場合)は、その偏差の絶対量に応じてブレーキノッチが入る。
一方、偏差が負に大きい場合(速度が遅すぎる場合)は、その偏差の絶対量に応じて力行ノッチが入る。なお、図示しないが、推奨走行速度と実速度の偏差より、推奨ノッチではなく推奨加速度を演算してもよい。運転支援表示装置5aは、推奨走行速度及び推奨ノッチを図8に示すように計器盤に表示する。
【0029】
運転士はこの推奨速度や推奨ノッチを見て、ノッチを操作することになる。なお、図示しないが運転支援表示装置は推奨ノッチではなく推奨加速度を表示してもよい。以上により、波状摩耗が発生しやすい区間、例えばある曲線区間において、走行時間が同じ列車でも推奨速度や実際の速度が列車ごとに変わり、速度分布が分散することになる。
【0030】
以上説明した列車制御システム1を適用した時のレールの波状摩耗の進み方について、図9を用いて説明する。図9は曲線区間2−bの例である。従来では曲線区間の速度分布は制限速度付近に集中しているため、波状摩耗の波長がほぼ同一となり、通過する列車の積算重量に比例して波状摩耗が成長していく。
一方、この実施例では、波状摩耗が発生しやすい区間における列車の速度分布が分散するように速度パターンを生成し、それに基づいた運転支援をしているため、各列車によって生成される波状摩耗の波長が分散し、波状摩耗の成長を抑制することができる。
ただし、速度パターンの演算方法は上記の順番や方法に限られたものではなく、例えば、まず一番波状摩耗の発生が顕著な区間(急曲線区間等)に対して速度分布が大きく分散するように速度を決定し、それ以外の区間の速度を決定するようにしてもよい。また、地上システム7の機能を一部、列車2で分担してもよく、その逆でもよい。
【0031】
[実施例2]
次に実施例2について、実施例1と相違のある部分を中心に説明する。実施例2は、いわゆるATO(Automatic Train Operation)を適用した列車に有効なものである。
図10に列車制御システム1の構成を示す。列車2aは、実施例1と比較して、車上子21aをさらに有し、地上に設置された地上子22(トランスポンダ)から正確な位置を取得し、速度センサに基づき算出した自車位置を補正することで精度良く列車位置を推定する。また、列車制御装置4aには、ATOの機能が搭載されており、力行、制動、停止などの操作を実現できる。また、列車の運転は基本的にATOが担うため、運転士への運転支援装置を搭載していない。それ以外は実施例1と同様の構成のため説明を省略する。
【0032】
実施例2の列車制御システム1において行う処理は、実施例1と同様に、図3のステップS31〜35で推奨ノッチを決定する。前述したように列車制御装置4aにはATOの機能が搭載されており、上記のとおり決定された推奨ノッチに基づきノッチを制御する。
以上により、列車制御システムは波状摩耗が発生しやすい区間における列車の速度分布を分散させることができ、各列車によって発生する波状摩耗の波長が分散する。その結果、波状摩耗の成長を抑制することができる。特にATOが搭載された車両では列車の速度が厳密に制御され、ばらつきが少ないため、波状摩耗の成長が早くなりやすいので、この実施例によれば、特に波状摩耗抑制効果がきわめて高い。
【0033】
[実施例3]
実施例3について、実施例1と相違のある部分を中心に説明する。実施例3は、列車の速度分布に基づき波状摩耗の進行状況を推定し、それに基づいて運転支援をするものである。
【0034】
図11に、実施例3における列車制御システム1の構成を示す。列車2aは、実施例1と比較して、加速度センサ31aをさらに備えており、並進の3軸方向の加速度を検出できる。それ以外は、実施例1との相違はないため、説明を割愛する。
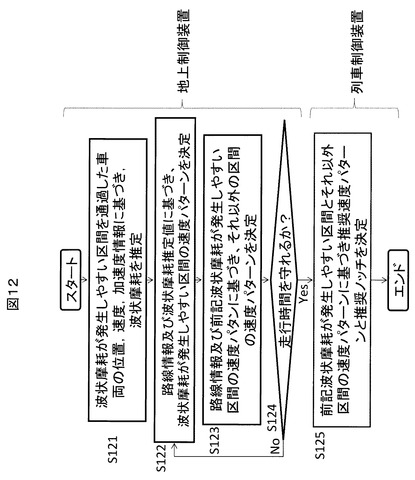
図12に、実施例3の列車制御システム1において行われる処理のフローチャートを示す。
ステップS121では、地上制御装置9が、波状摩耗が発生しやすい区間を通過した列車の位置、速度、加速度情報に基づき、波状摩耗の成長を予測する。
この際用いる推定方法としては、例えば“レール波状摩耗の成長過程に関する考察(第4報)、日本機械学会 Dynamics and Design Conference’99 講演論文集”などに記載のシミュレーションモデルを拡張することで実現する。上記シミュレーションモデルにより、現在発生している波状磨耗の波長λ2bを推定する。
【0035】
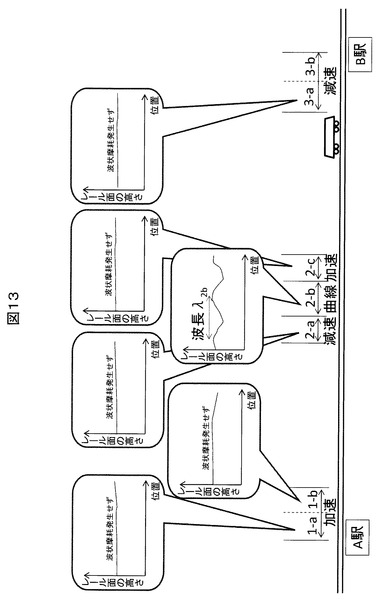
次に、ステップS122において、地上制御装置9が、制限速度及び前記波状摩耗推定値に基づき波状摩耗が発生しやすい区間の速度パターンを決定する方法を図13に示す。S121で推定した波状摩耗の波長λ2bと同じ波長の波状摩耗が発生しない速度を演算する。すなわち、列車の走行速度をVとし、波状摩耗の波長をλ、周波数をνとしたとき、一般的には次の(1)式が成立するので、(1)式に列車ごとに適当に分散させた波長λ(現在発生している波状摩耗の波長λ2bとは異なる波長)を入力し、速度を求める。
V=λ・ν ・・・(1)
ここで波状摩耗の周波数νは、経験的に得られた値、実験で求めた値を用いてもよいし、推定モデルで得られたものを用いてもよい。このように求めた速度を参考に、波状摩耗が発生しやすい区間における速度パターンを生成する。ステップS123〜ステップS125は、実施例1のステップS33〜ステップS35と同様のため説明を省略する。
【0036】
以上により、列車制御システムは、現在発生している波状摩耗の波長に基づき、波状摩耗が発生しやすい区間における列車の速度分布が分散するように速度パターンを生成し、それに基づいた運転支援をするため、各列車によって発生する波状摩耗の波長が分散し、波状摩耗の成長を抑制することができる。
【0037】
[実施例4]
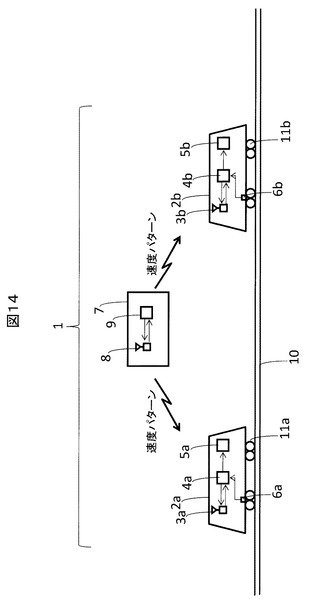
実施例4について、実施例1と相違のある部分を中心に説明する。この実施例では、予め地上システム7が各列車の速度パターンを生成し、各列車の制御システム2に送信する。すなわち、波状摩耗が発生しやすい区間の速度パターンが分散するように地上システム7がフィードフォーワード的に速度を割り当てるようにしている。
【0038】
実施例4の列車制御システム1の構成を図14に示す。地上システム7は、各列車からの位置、速度の情報は受信せず、速度パターンを送信している。それ以外のシステム構成は同じため説明を省略する。
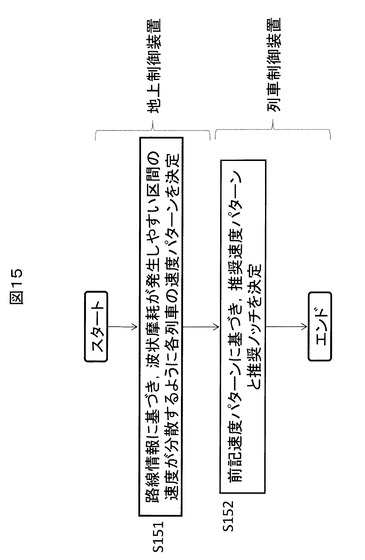
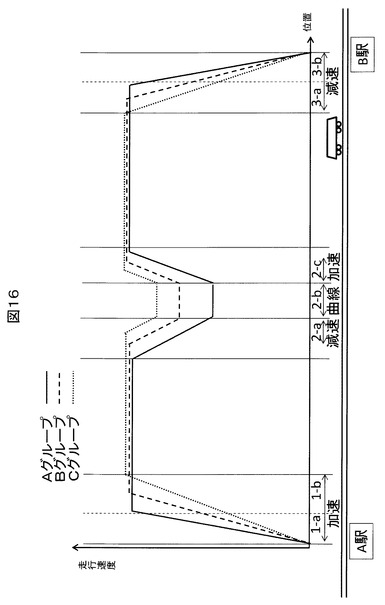
実施例4の列車制御システム1で行われる処理のフローチャートを、図15を用いて説明する。ステップS151では、走行時間及び制限速度の情報に基づき、波状摩耗が発生しやすい区間が分散するように各列車の速度パターンを生成する。例えば、図16に示すように、グループを3つに分け、各列車にその速度パターンを送信する。ステップS152は、実施例1のステップS35と同様のため説明を省略する。
【0039】
以上により、波状摩耗が発生しやすい区間における列車の速度分布が分散するように速度パターンを生成しそれに基づいた運転支援をするため、各列車によって発生する波状摩耗の波長が分散し、波状摩耗の成長を遅らせる又は抑制することができる。特に、実施例4では、運行管理の機能を有する地上システム7で予め各グループに速度パターンを割り当てるため、地上システム7にこのロジックを追加するだけで大きなシステム変更なく実現できる。本実施例ではフィードフォーワード的に速度を決定したが、波状摩耗の発生状況により長期的に速度パターンを見直すなど、フィードバック的なアプローチの他の実施例との組み合わせてもよい。
【0040】
[実施例5]
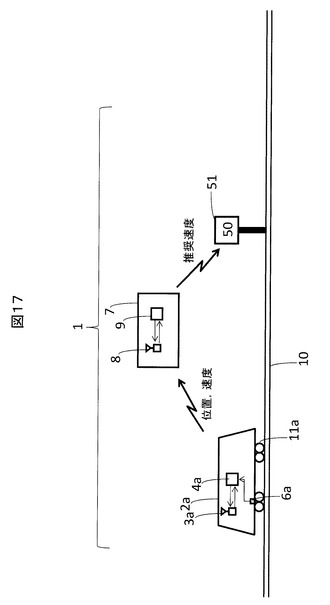
実施例5について、第1の実施形態と相違のある部分を中心に説明する。実施例5は、地上システム7が、波状摩耗が発生しやすい区間における列車の速度分布に基づき、各列車の速度パターンを生成し、その情報に基づき可変速度標識51の制限速度(推奨速度)表示を変更するものである。
【0041】
実施例5の列車制御システム1の構成を図17に示す。列車2aには運転支援装置は搭載していない。また、地上システムからの推奨速度情報を受信しそれを表示する可変速度標識51がある。それ以外は、実施例1と同様のため説明を省略する。
この列車制御システム1による処理は、実施例1のステップS31からステップS34(図3)と同様である。地上システム7は、制御対象列車のひとつ前の列車が可変速度標識を通過したら、ステップS31〜ステップS34で算出した速度パターンに対応した推奨速度を可変速度標識に送信し、制限速度を書き換える。
【0042】
以上により、列車制御システムは波状摩耗が発生しやすい区間を通過する列車の速度分布が分散するように速度パターンを生成し、それに基づいた制限速度を表示するため、各列車によって発生する波状摩耗の波長が分散し、波状摩耗の成長を遅らせる又は抑制することができる。特に実施例5では、運転支援装置も必要なく、可変速度標識が導入されている区間では大きな設備を導入することなくロジックの変更のみで本発明を実現できる。
【0043】
[実施例6]
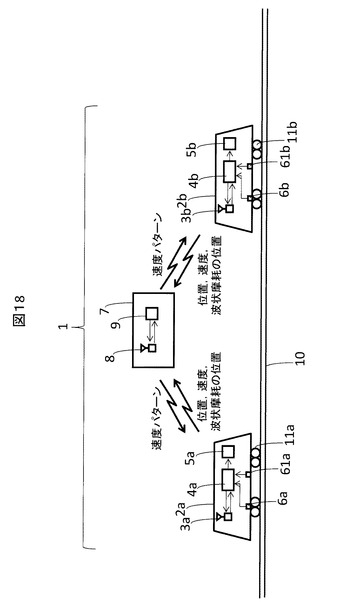
実施例6について、実施例1と相違のある部分を中心に説明する。この実施例は、列車2に波状摩耗を検出する波状摩耗検出装置61aを搭載し、波状摩耗の検知情報に基づき、列車制御装置4aが速度パターンを生成するものである。
実施例6の列車制御システム1の構成を図18に示す。列車2は、波状摩耗検出装置61aを備え、波状摩耗の場所を検知できる。波状摩耗検出装置61aは、図示しないマイクロフォンとマイクロフォンで取得した音声データを解析する図示しない解析装置からなる。それ以外は、実施例1と同様のため説明を省略する。
なお、一般に、波状摩耗が発生した場合、その波長や周波数に応じて、特定の周波数成分の音声が発生することから、音声データから周波数成分を抽出することにより、波状摩耗の発生状況を検出することができる。
【0044】
実施例6の列車制御システム1に行われる処理のフローチャートについて説明する。図3のステップS32を除いて、実施例1と同じためステップ32以外の説明を省略する。
ステップS32では、波状摩耗検出装置61aで波状摩耗が発生していると検知した区間の速度パターンを、それ以外の区間よりも大きく分散させる。
以上により、列車制御システム1は波状摩耗が発生しやすい区間を通過する列車の速度分布が分散するように速度パターンを生成し、それに基づいた運転支援を行うため、各列車によって発生する波状摩耗の波長が分散し、波状摩耗の成長を遅らせたり、抑制することができる。特に実施例6では、波状摩耗が発生し始めた区間の列車の速度を重点的に分散させるので、波状摩耗進行の抑制効果が高い。
以上の実施例1〜6に示す実施形態を示したが、本発明の趣旨から逸脱しない範囲で、同等の手段や方法に置き換えることは可能である。
【産業上の利用可能性】
【0045】
以上説明したように、本発明の列車制御システムによれば、軌道のうち波状摩耗の生じやすい区間を特定し、該区間における列車の速度分布が分散するように各列車に対する速度パターンを生成するので、削正装置や摩擦調整剤散布等の定期的なメンテナンスを必要とすることなく、各列車によって発生する波状摩耗の波長を分散させ、波状摩耗の成長を確実に抑制することができるので、列車の運行の維持管理費を抜本的に改善する列車制御システムとして広く採用されることが期待できる。
【符号の説明】
【0046】
1…列車制御システム、2…列車、3…列車の通信装置、4…列車制御装置、5…運転支援装置、6…速度検出装置、7…地上システム、8…地上システムの通信装置、9…地上制御システム、10…レール、11…車輪、21…車上子、22…地上子、31…加速度センサ、51…可変速度表示装置、61…波状摩耗検出装置
【技術分野】
【0001】
本発明は、列車走行を制御する列車制御システムに関する。
【背景技術】
【0002】
加速、減速区間や曲線区間のレールには、波状摩耗と呼ばれる波状の摩耗が発生し、列車走行時の騒音や振動の原因となっていた。この問題に対し、下記特許文献1では、削正装置を用いて波状摩耗を削正する方法を提案している。また、下記特許文献2では、車輪とレールとの間に摩擦調整剤を介在させ、摩擦係数をコントロールすることで、波状摩耗の発生を予防する方法を提案している。下記非特許文献1では、波状摩耗の波長と列車の走行速度は図1のように比例関係にあることを実験で明らかにしている。また、同文献には、変形前の波状摩耗の波形と、その後、レールによって削られる変形量の位相差が90度以上であれば、波状摩耗が成長しないことが示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平10−195805号公報
【特許文献2】特開2001−151104号公報
【非特許文献】
【0004】
【非特許文献1】「波状摩耗のメカニズム」(鉄道列車と技術 No.95)
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記特許文献1の削正装置でレールを削正することで、列車走行時の騒音や振動を防止できる。しかしながら、列車の営業時間外に削正装置を使ってレールを削正する必要があるため、メンテナンスに掛かる労力、コストが大きいという課題があった。
また、特許文献2に示す摩擦調整剤では、波状摩耗を防止することができる。しかし、新たに摩擦調整剤の噴射装置が必要であることと、列車が走行する度に摩擦調整剤を噴射する必要があるため高コストで環境に与える影響が課題となっていた。
【0006】
また、非特許文献1には、前述のように、変形前の波状摩耗の波形とレールによって削られる変形量の位相差が90度以上であれば、波状摩耗の成長を抑制できることが示されているが、波状摩耗は、一般的にレールの継ぎ目などを起点にして発生することが知られているため、波状摩耗が発生する起点自体をずらすことにより、波状摩耗の位相を90度以上ずらすことはできない。
【課題を解決するための手段】
【0007】
そこで、この課題を解決するため、本発明は、波状摩耗が発生しやすい区間を通過した列車の速度分布が分散するように、列車の速度パターンを決定する列車制御システムを提供する。より具体的には、
(1)軌道を走行する列車を支援あるいは制御する列車制御システムにおいて、前記列車制御システムは、前記軌道のうち波状摩耗の生じやすい区間を特定し、該区間における列車の速度分布が分散するように各列車に対する速度パターンを生成する。
【0008】
(2)前記の列車制御システムにおいて、前記走行速度パターンに基づき運転士への支援情報として推奨走行速度、推奨ノッチ、推奨加速度のいずれかを表示する。
【0009】
(3)前記の列車制御システムにおいて、前記速度パターンに基づきノッチ指令を決定し,該ノッチ指令に基づき列車を自律的に制御する。
【0010】
(4)前記の列車制御システムにおいて、列車の制限速度を表示する可変速度標識をさらに備え、前記可変速度標識が前記速度パターンに基づき制限速度を変更する。
【0011】
(5)前記の列車制御システムにおいて、前記列車制御システムが、前記列車の位置及び速度情報に基づいて前記波状摩耗の生じやすい区間における列車の速度分布を積算することにより更新し、更新した速度分布に基づいて、該区間における列車の速度分布が分散するように、各列車に対する前記速度パターンを生成する。
【0012】
(6)前記の列車制御システムにおいて、前記列車制御システムが、波状摩耗の生じやすい区間において、該区間を通過する各列車の速度分布が分散するように、予め各列車に対する前記速度パターンを生成する。
【0013】
(7)前記の列車制御システムにおいて、前記列車が速度センサ及び加速度センサを備え、前記列車制御システムが、通過した区間における列車の位置情報、速度情報及び加速度情報に基づいて、当該区間における波状摩耗の進行状況を推定し、推定した波状摩耗の進行状況に基づいて、該区間における列車の速度分布が分散するように各列車に対する前記速度パターンを生成する。
【0014】
(8)前記の列車制御システムにおいて、前記列車が、軌道走行時の発生音を収集するマイクロフォンと該発生音を解析する解析装置とからなる波状摩耗検出装置を有し、前記地上システムが前記波状摩耗検出装置の検出値に基づき、波状摩耗の生じやすい区間を特定する。
【発明の効果】
【0015】
本発明によれば、波状摩耗が発生しやすい区間である加速、減速区間や曲線区間において、通過する列車の速度を分散させることができ、これにより、図1に示す関係から、波状摩耗の波長を分散させることができ、その結果、この区間を列車が同じ速度で通過する場合と比較して、波状摩耗の成長を確実に抑制することが可能となる。
【図面の簡単な説明】
【0016】
【図1】列車走行速度と波状摩耗の波長の関係を示す図。
【図2】実施例1において前提とする列車制御システムを示す図。
【図3】実施例1における列車制御システムのフローチャートを示す図。
【図4】実施例1における波状摩耗が発生しやすい区間の速度分布を示す図。
【図5】実施例1における波状摩耗が発生しやすい区間での速度パターン決定方法を示す図。
【図6】実施例1における波状摩耗が発生しやすい区間以外での速度パターン決定方法を示す図。
【図7】実施例1における推奨ノッチの決定方法を示す図。
【図8】実施例1における運転支援装置による支援情報を示す図。
【図9】実施例1における曲線区間での波状摩耗の進み方を示す図。
【図10】実施例2における列車制御システムの構成を示す図。
【図11】実施例3における列車制御システムの構成を示す図。
【図12】実施例3における列車制御システムのフローチャートを示す図。
【図13】実施例3における波状摩耗の推定値を示す図。
【図14】実施例4における列車制御システムの構成を示す図。
【図15】実施例4における列車制御システムのフローチャートを示す図。
【図16】実施例4における各グループに割り当てられた速度パターンを示す図。
【図17】実施例5における列車制御システムの構成を示す図。
【図18】実施例6における列車制御システムの構成を示す図。
【発明を実施するための形態】
【0017】
以下、本発明の実施例を図面に基づいて説明する。
【実施例】
【0018】
[実施例1]
図2は実施例1の列車制御システム1の全体構成を示す。列車制御システム1は、地上システム7と複数の列車(2a、2b・・・)で構成される。ここでは簡単のため列車2aを用いて説明し、列車2bの説明は省略する。列車2aは、地上システム7と通信するための通信装置3aと、列車制御装置4aと、運転士への支援情報を表示する運転支援装置5aと、列車の走行速度を検出する速度検出装置6aと、図示しない架線から供給される電力を集電するための図示しないパンタグラフと、パンタグラフからの電力で列車2aを駆動する図示しないモータと、このモータの交流電力を生成する図示しないインバータと、このインバータを制御する図示しない駆動制御装置と、モータで発生した力をレール10に伝える車輪11aから構成される。地上システム7は、列車2aと通信するための通信装置8と、地上制御装置9とで構成される。
【0019】
列車制御装置4aは、通信装置3aを介して、速度パターンを地上システム7から受信し、自車の位置及び速度を地上システム7に送信する。列車制御装置4aは、速度パターン及び速度検出装置6aで検出した速度に基づき、運転士への支援情報を決定し、前記運転支援装置5aへ送信し、この運転支援装置5aが、運転士への支援情報を表示する。なお、地上システム7へ送信する自車位置は、この速度に基づき算出する。但し、GPSや地上子などで補正してもよい。
地上制御装置9は、通信装置8を介して、各列車の位置及び速度情報を受信する。詳細は後述するが、地上制御装置9は、各列車の前記列車の位置及び速度情報に基づき、波状摩耗が発生しやすい区間の列車の速度分布を逐次更新する。
【0020】
地上制御装置9は、速度分布及び路線情報(制限速度、走行時間等)に基づき、各列車の速度パターンを生成し、通信装置8を介して、列車の速度パターンを列車2aに送信する。
実施例1における列車制御システムで行う処理のフローチャートを図3に示す。
一般に波状摩耗が発生しやすい区間とは、列車速度が変化する加速区間(特に急勾配の加速区間)、減速区間、曲線区間である。ステップS31にて、地上制御装置9は、列車2aより受信した波状摩耗が発生しやすい区間を通過した時の位置及び速度に基づき、図4のような波状摩耗が発生しやすい区間を通過した列車の速度分布を更新する。
【0021】
速度分布は、図4に示すように横軸が列車速度で、縦軸が通過した列車重量の積算値のグラフで、区間ごとに速度分布を保存することができる。ただし、縦軸はこれに限定するものではなく、その路線を運行する列車の重量が大きく変動しないような場合は、列車の通過列車数等で列車重量に代用してもよい。速度分布を保存する区間は、細かく分割した方がより速度分布履歴の精度が上がり、波状摩耗の成長を抑制しやすくなる。
【0022】
次に、ステップS32にて、地上制御装置9は、図5に示すように路線情報及び積算した速度分布に基づき波状摩耗が発生しやすい区間の速度パターンを決定する。
すなわち、列車がA駅を発車し、次のB駅に到着するまでの走行を考えると、区間1−a、区間1−bが加速区間、区間2−aから区間2−cのうち、区間2−aが区間2−bの曲線区間に伴う減速区間、区間2−bが曲線区間、区間2−cが曲線区間走行後の加速区間、そして、区間3−a、区間3−bがB駅停車のための減速区間となる。これら区間1−a、区間1−b、区間2−aから区間2−c、区間3−a、区間3−bが、波状摩耗の生じやすい区間として予め設定する。
【0023】
ステップS32では、図4に示す、横軸が列車速度で縦軸が通過した列車重量の積算値のグラフに基づき、地上制御装置9は、特定の列車に対し、区間1−aでは、図5の矢印で示す、最も列車重量の積算値が最も小さい、左端の最低速度域を選択して速度パターンを与える。同様に、それぞれの区間で、矢印で示す、最も列車重量の積算値が小さい速度を選択するように、速度パターンを決定すれば、最終的には、列車速度に対し列車重量の積算値を平準化することが可能になる。
【0024】
なお、ステップS32で、適切でない速度パターンを設定すると、走行時間(運行時間)を維持できなく可能性があることから、走行時間が維持できなくなるような極端な速度パターンを生成しないように、選択できる速度にある一定の速度範囲を設定し、この範囲か選択するようにするとよい。すなわち、地上制御装置9は、各列車の駅A−駅B間の運行時間が予め定めたダイアグラムとおりとなり、しかも、その間、極端な加減速が発生しないよう、これらの区間以外での速度パターンも考慮して、所定の幅で速度パターンを選定することが好ましい。
幅の持たせ方は、例えば、制限速度及び走行時間に基づいて、省エネになる一般的な速度パターンを設定し、その速度パターンに一定の速度範囲を設定するとよい。
【0025】
このように設定した速度範囲の中で、地上制御装置9は、図5に示すような速度分布の決定により、波状摩耗が発生しやすい区間を通過する列車の速度分布が分散するように速度パターンを生成する。なお、列車の速度分布は、1時間や1日の単位で分散している必要はなく、波状摩耗が成長するより前に(例えば、レールを走行した列車重量の積算値が200万トン以内に)で分散していればよい。
【0026】
次に、ステップS33にて、地上制御装置9は、図6に示すように路線情報及び前記波状摩耗が発生しやすい区間の速度パターンに基づき、それ以外の区間の速度パターンを決定する。具体的には、できるだけ走行時間を守るように前記波状摩耗が発生しやすい区間の速度パターンを結ぶ。
続いて、ステップS34にて、列車制御装置4aは、ステップS32〜33で決定した速度パターンで走行時間を維持できるか否か判断する。すなわち、例えば、加速区間である区間1−a、1−bで、低速の速度パターンを指示した場合、B駅に到るまでの区間において、区間1−a、1−bで生じた遅れを、所定の微少速度範囲で相殺できる程度のものであるか否かを判断する。
【0027】
維持できない場合は、ステップS32、ステップS33で走行時間が維持できるように、速度パターンを修正する。維持できる場合は、ステップS35に進み、列車制御装置4aが、速度パターンを地上制御装置から受信し、運転士への支援情報として推奨速度パターンと推奨ノッチを生成する。
【0028】
推奨速度パターンは、ステップS31〜ステップS34で求めた速度パターンそのものである。推奨ノッチは、図7に示すように、推奨走行速度と実速度の偏差より決定する。偏差が正の場合(速度が速すぎる場合)は、その偏差の絶対量に応じてブレーキノッチが入る。
一方、偏差が負に大きい場合(速度が遅すぎる場合)は、その偏差の絶対量に応じて力行ノッチが入る。なお、図示しないが、推奨走行速度と実速度の偏差より、推奨ノッチではなく推奨加速度を演算してもよい。運転支援表示装置5aは、推奨走行速度及び推奨ノッチを図8に示すように計器盤に表示する。
【0029】
運転士はこの推奨速度や推奨ノッチを見て、ノッチを操作することになる。なお、図示しないが運転支援表示装置は推奨ノッチではなく推奨加速度を表示してもよい。以上により、波状摩耗が発生しやすい区間、例えばある曲線区間において、走行時間が同じ列車でも推奨速度や実際の速度が列車ごとに変わり、速度分布が分散することになる。
【0030】
以上説明した列車制御システム1を適用した時のレールの波状摩耗の進み方について、図9を用いて説明する。図9は曲線区間2−bの例である。従来では曲線区間の速度分布は制限速度付近に集中しているため、波状摩耗の波長がほぼ同一となり、通過する列車の積算重量に比例して波状摩耗が成長していく。
一方、この実施例では、波状摩耗が発生しやすい区間における列車の速度分布が分散するように速度パターンを生成し、それに基づいた運転支援をしているため、各列車によって生成される波状摩耗の波長が分散し、波状摩耗の成長を抑制することができる。
ただし、速度パターンの演算方法は上記の順番や方法に限られたものではなく、例えば、まず一番波状摩耗の発生が顕著な区間(急曲線区間等)に対して速度分布が大きく分散するように速度を決定し、それ以外の区間の速度を決定するようにしてもよい。また、地上システム7の機能を一部、列車2で分担してもよく、その逆でもよい。
【0031】
[実施例2]
次に実施例2について、実施例1と相違のある部分を中心に説明する。実施例2は、いわゆるATO(Automatic Train Operation)を適用した列車に有効なものである。
図10に列車制御システム1の構成を示す。列車2aは、実施例1と比較して、車上子21aをさらに有し、地上に設置された地上子22(トランスポンダ)から正確な位置を取得し、速度センサに基づき算出した自車位置を補正することで精度良く列車位置を推定する。また、列車制御装置4aには、ATOの機能が搭載されており、力行、制動、停止などの操作を実現できる。また、列車の運転は基本的にATOが担うため、運転士への運転支援装置を搭載していない。それ以外は実施例1と同様の構成のため説明を省略する。
【0032】
実施例2の列車制御システム1において行う処理は、実施例1と同様に、図3のステップS31〜35で推奨ノッチを決定する。前述したように列車制御装置4aにはATOの機能が搭載されており、上記のとおり決定された推奨ノッチに基づきノッチを制御する。
以上により、列車制御システムは波状摩耗が発生しやすい区間における列車の速度分布を分散させることができ、各列車によって発生する波状摩耗の波長が分散する。その結果、波状摩耗の成長を抑制することができる。特にATOが搭載された車両では列車の速度が厳密に制御され、ばらつきが少ないため、波状摩耗の成長が早くなりやすいので、この実施例によれば、特に波状摩耗抑制効果がきわめて高い。
【0033】
[実施例3]
実施例3について、実施例1と相違のある部分を中心に説明する。実施例3は、列車の速度分布に基づき波状摩耗の進行状況を推定し、それに基づいて運転支援をするものである。
【0034】
図11に、実施例3における列車制御システム1の構成を示す。列車2aは、実施例1と比較して、加速度センサ31aをさらに備えており、並進の3軸方向の加速度を検出できる。それ以外は、実施例1との相違はないため、説明を割愛する。
図12に、実施例3の列車制御システム1において行われる処理のフローチャートを示す。
ステップS121では、地上制御装置9が、波状摩耗が発生しやすい区間を通過した列車の位置、速度、加速度情報に基づき、波状摩耗の成長を予測する。
この際用いる推定方法としては、例えば“レール波状摩耗の成長過程に関する考察(第4報)、日本機械学会 Dynamics and Design Conference’99 講演論文集”などに記載のシミュレーションモデルを拡張することで実現する。上記シミュレーションモデルにより、現在発生している波状磨耗の波長λ2bを推定する。
【0035】
次に、ステップS122において、地上制御装置9が、制限速度及び前記波状摩耗推定値に基づき波状摩耗が発生しやすい区間の速度パターンを決定する方法を図13に示す。S121で推定した波状摩耗の波長λ2bと同じ波長の波状摩耗が発生しない速度を演算する。すなわち、列車の走行速度をVとし、波状摩耗の波長をλ、周波数をνとしたとき、一般的には次の(1)式が成立するので、(1)式に列車ごとに適当に分散させた波長λ(現在発生している波状摩耗の波長λ2bとは異なる波長)を入力し、速度を求める。
V=λ・ν ・・・(1)
ここで波状摩耗の周波数νは、経験的に得られた値、実験で求めた値を用いてもよいし、推定モデルで得られたものを用いてもよい。このように求めた速度を参考に、波状摩耗が発生しやすい区間における速度パターンを生成する。ステップS123〜ステップS125は、実施例1のステップS33〜ステップS35と同様のため説明を省略する。
【0036】
以上により、列車制御システムは、現在発生している波状摩耗の波長に基づき、波状摩耗が発生しやすい区間における列車の速度分布が分散するように速度パターンを生成し、それに基づいた運転支援をするため、各列車によって発生する波状摩耗の波長が分散し、波状摩耗の成長を抑制することができる。
【0037】
[実施例4]
実施例4について、実施例1と相違のある部分を中心に説明する。この実施例では、予め地上システム7が各列車の速度パターンを生成し、各列車の制御システム2に送信する。すなわち、波状摩耗が発生しやすい区間の速度パターンが分散するように地上システム7がフィードフォーワード的に速度を割り当てるようにしている。
【0038】
実施例4の列車制御システム1の構成を図14に示す。地上システム7は、各列車からの位置、速度の情報は受信せず、速度パターンを送信している。それ以外のシステム構成は同じため説明を省略する。
実施例4の列車制御システム1で行われる処理のフローチャートを、図15を用いて説明する。ステップS151では、走行時間及び制限速度の情報に基づき、波状摩耗が発生しやすい区間が分散するように各列車の速度パターンを生成する。例えば、図16に示すように、グループを3つに分け、各列車にその速度パターンを送信する。ステップS152は、実施例1のステップS35と同様のため説明を省略する。
【0039】
以上により、波状摩耗が発生しやすい区間における列車の速度分布が分散するように速度パターンを生成しそれに基づいた運転支援をするため、各列車によって発生する波状摩耗の波長が分散し、波状摩耗の成長を遅らせる又は抑制することができる。特に、実施例4では、運行管理の機能を有する地上システム7で予め各グループに速度パターンを割り当てるため、地上システム7にこのロジックを追加するだけで大きなシステム変更なく実現できる。本実施例ではフィードフォーワード的に速度を決定したが、波状摩耗の発生状況により長期的に速度パターンを見直すなど、フィードバック的なアプローチの他の実施例との組み合わせてもよい。
【0040】
[実施例5]
実施例5について、第1の実施形態と相違のある部分を中心に説明する。実施例5は、地上システム7が、波状摩耗が発生しやすい区間における列車の速度分布に基づき、各列車の速度パターンを生成し、その情報に基づき可変速度標識51の制限速度(推奨速度)表示を変更するものである。
【0041】
実施例5の列車制御システム1の構成を図17に示す。列車2aには運転支援装置は搭載していない。また、地上システムからの推奨速度情報を受信しそれを表示する可変速度標識51がある。それ以外は、実施例1と同様のため説明を省略する。
この列車制御システム1による処理は、実施例1のステップS31からステップS34(図3)と同様である。地上システム7は、制御対象列車のひとつ前の列車が可変速度標識を通過したら、ステップS31〜ステップS34で算出した速度パターンに対応した推奨速度を可変速度標識に送信し、制限速度を書き換える。
【0042】
以上により、列車制御システムは波状摩耗が発生しやすい区間を通過する列車の速度分布が分散するように速度パターンを生成し、それに基づいた制限速度を表示するため、各列車によって発生する波状摩耗の波長が分散し、波状摩耗の成長を遅らせる又は抑制することができる。特に実施例5では、運転支援装置も必要なく、可変速度標識が導入されている区間では大きな設備を導入することなくロジックの変更のみで本発明を実現できる。
【0043】
[実施例6]
実施例6について、実施例1と相違のある部分を中心に説明する。この実施例は、列車2に波状摩耗を検出する波状摩耗検出装置61aを搭載し、波状摩耗の検知情報に基づき、列車制御装置4aが速度パターンを生成するものである。
実施例6の列車制御システム1の構成を図18に示す。列車2は、波状摩耗検出装置61aを備え、波状摩耗の場所を検知できる。波状摩耗検出装置61aは、図示しないマイクロフォンとマイクロフォンで取得した音声データを解析する図示しない解析装置からなる。それ以外は、実施例1と同様のため説明を省略する。
なお、一般に、波状摩耗が発生した場合、その波長や周波数に応じて、特定の周波数成分の音声が発生することから、音声データから周波数成分を抽出することにより、波状摩耗の発生状況を検出することができる。
【0044】
実施例6の列車制御システム1に行われる処理のフローチャートについて説明する。図3のステップS32を除いて、実施例1と同じためステップ32以外の説明を省略する。
ステップS32では、波状摩耗検出装置61aで波状摩耗が発生していると検知した区間の速度パターンを、それ以外の区間よりも大きく分散させる。
以上により、列車制御システム1は波状摩耗が発生しやすい区間を通過する列車の速度分布が分散するように速度パターンを生成し、それに基づいた運転支援を行うため、各列車によって発生する波状摩耗の波長が分散し、波状摩耗の成長を遅らせたり、抑制することができる。特に実施例6では、波状摩耗が発生し始めた区間の列車の速度を重点的に分散させるので、波状摩耗進行の抑制効果が高い。
以上の実施例1〜6に示す実施形態を示したが、本発明の趣旨から逸脱しない範囲で、同等の手段や方法に置き換えることは可能である。
【産業上の利用可能性】
【0045】
以上説明したように、本発明の列車制御システムによれば、軌道のうち波状摩耗の生じやすい区間を特定し、該区間における列車の速度分布が分散するように各列車に対する速度パターンを生成するので、削正装置や摩擦調整剤散布等の定期的なメンテナンスを必要とすることなく、各列車によって発生する波状摩耗の波長を分散させ、波状摩耗の成長を確実に抑制することができるので、列車の運行の維持管理費を抜本的に改善する列車制御システムとして広く採用されることが期待できる。
【符号の説明】
【0046】
1…列車制御システム、2…列車、3…列車の通信装置、4…列車制御装置、5…運転支援装置、6…速度検出装置、7…地上システム、8…地上システムの通信装置、9…地上制御システム、10…レール、11…車輪、21…車上子、22…地上子、31…加速度センサ、51…可変速度表示装置、61…波状摩耗検出装置
【特許請求の範囲】
【請求項1】
軌道を走行する列車を支援あるいは制御する列車制御システムにおいて、前記列車制御システムは、前記軌道のうち波状摩耗の生じやすい区間を特定し、該区間における列車の速度分布が分散するように各列車に対する速度パターンを生成する列車制御システム。
【請求項2】
前記走行速度パターンに基づき運転士への支援情報として推奨走行速度、推奨ノッチ、推奨加速度のいずれかを表示する請求項1に記載の列車制御システム。
【請求項3】
前記速度パターンに基づきノッチ指令を決定し、該ノッチ指令に基づき列車を自律的に制御する請求項1に記載の列車制御システム。
【請求項4】
列車の制限速度を表示する可変速度標識をさらに備え、前記可変速度標識が前記速度パターンに基づき制限速度を変更する請求項1に記載の列車制御システム。
【請求項5】
前記列車制御システムが、前記列車の位置及び速度情報に基づいて前記波状摩耗の生じやすい区間における列車の速度分布を積算することにより更新し、更新した速度分布に基づいて、該区間における列車の速度分布が分散するように、各列車に対する前記速度パターンを生成する請求項1から4のいずれかに記載の列車制御システム
【請求項6】
前記列車制御システムが、波状摩耗の生じやすい区間において、該区間を通過する各列車の速度分布が分散するように、予め各列車に対する前記速度パターンを生成する請求項1から請求項4のいずれかに記載の列車制御システム。
【請求項7】
前記列車が速度センサ及び加速度センサを備え、前記列車制御システムが、通過した区間における列車の位置情報、速度情報及び加速度情報に基づいて、当該区間における波状摩耗の進行状況を推定し、推定した波状摩耗の進行状況に基づいて、該区間における列車の速度分布が分散するように各列車に対する前記速度パターンを生成する請求項1から請求項4のいずれかに記載の列車制御システム。
【請求項8】
前記列車が、軌道走行時の発生音を収集するマイクロフォンと該発生音を解析する解析装置とからなる波状摩耗検出装置を有し、前記地上システムが前記波状摩耗検出装置の検出値に基づき、波状摩耗の生じやすい区間を特定する請求項1から請求項4のいずれかに記載の列車制御システム。
【請求項1】
軌道を走行する列車を支援あるいは制御する列車制御システムにおいて、前記列車制御システムは、前記軌道のうち波状摩耗の生じやすい区間を特定し、該区間における列車の速度分布が分散するように各列車に対する速度パターンを生成する列車制御システム。
【請求項2】
前記走行速度パターンに基づき運転士への支援情報として推奨走行速度、推奨ノッチ、推奨加速度のいずれかを表示する請求項1に記載の列車制御システム。
【請求項3】
前記速度パターンに基づきノッチ指令を決定し、該ノッチ指令に基づき列車を自律的に制御する請求項1に記載の列車制御システム。
【請求項4】
列車の制限速度を表示する可変速度標識をさらに備え、前記可変速度標識が前記速度パターンに基づき制限速度を変更する請求項1に記載の列車制御システム。
【請求項5】
前記列車制御システムが、前記列車の位置及び速度情報に基づいて前記波状摩耗の生じやすい区間における列車の速度分布を積算することにより更新し、更新した速度分布に基づいて、該区間における列車の速度分布が分散するように、各列車に対する前記速度パターンを生成する請求項1から4のいずれかに記載の列車制御システム
【請求項6】
前記列車制御システムが、波状摩耗の生じやすい区間において、該区間を通過する各列車の速度分布が分散するように、予め各列車に対する前記速度パターンを生成する請求項1から請求項4のいずれかに記載の列車制御システム。
【請求項7】
前記列車が速度センサ及び加速度センサを備え、前記列車制御システムが、通過した区間における列車の位置情報、速度情報及び加速度情報に基づいて、当該区間における波状摩耗の進行状況を推定し、推定した波状摩耗の進行状況に基づいて、該区間における列車の速度分布が分散するように各列車に対する前記速度パターンを生成する請求項1から請求項4のいずれかに記載の列車制御システム。
【請求項8】
前記列車が、軌道走行時の発生音を収集するマイクロフォンと該発生音を解析する解析装置とからなる波状摩耗検出装置を有し、前記地上システムが前記波状摩耗検出装置の検出値に基づき、波状摩耗の生じやすい区間を特定する請求項1から請求項4のいずれかに記載の列車制御システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公開番号】特開2012−245835(P2012−245835A)
【公開日】平成24年12月13日(2012.12.13)
【国際特許分類】
【出願番号】特願2011−117640(P2011−117640)
【出願日】平成23年5月26日(2011.5.26)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
【公開日】平成24年12月13日(2012.12.13)
【国際特許分類】
【出願日】平成23年5月26日(2011.5.26)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
[ Back to top ]