
列車制御システム
【課題】列車制御システムにおいて、高い安全性と運行密度、省エネルギーでの最適な運行を達成する技術を提供する。
【解決手段】列車の車上装置20は、GPS衛星10aからの軌道情報と送信時刻情報と、情報の受信時刻を特定する車上クロック22と、受信情報と受信時刻とで在線範囲を算出する在線範囲算出部23と、地上装置30への自列車在線範囲情報の送信と地上装置30からの停止目標情報の受信を行う車上通信部24と、停止目標情報を元に自列車の走行速度を制御する速度制御部25とで構成する。地上装置30は、各列車の在線範囲情報で停止目標を算出する停止目標算出部32を有し、その停止目標情報を該列車へ送信する。
【解決手段】列車の車上装置20は、GPS衛星10aからの軌道情報と送信時刻情報と、情報の受信時刻を特定する車上クロック22と、受信情報と受信時刻とで在線範囲を算出する在線範囲算出部23と、地上装置30への自列車在線範囲情報の送信と地上装置30からの停止目標情報の受信を行う車上通信部24と、停止目標情報を元に自列車の走行速度を制御する速度制御部25とで構成する。地上装置30は、各列車の在線範囲情報で停止目標を算出する停止目標算出部32を有し、その停止目標情報を該列車へ送信する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、各列車が算出した列車位置に基づいて列車制御を行うシステムとその方法に関する。
【背景技術】
【0002】
鉄道システムでは、列車同士が衝突しないように鉄道信号システムによって走行制御している。従来の軌道回路を用いた信号システムでは、1軌道回路に1列車の在線だけを許可することで、列車間の安全を確保している。このため、軌道回路の長短で通常運行の列車間隔が決まる。高密度運行を行うためには列車間隔を縮める必要がある事から、短い軌道回路を用いることになる。ただし、軌道回路は数100mおきに設備を設置する必要があり、設備の導入・保守費用が高くなるという欠点を持っている。
【0003】
また、信号システムを含む鉄道保安システムにおいては、コスト削減や列車制御の高機能化という観点から、軌道回路によらずに列車制御する方式として、無線信号方式が検討されている。無線信号方式では、一般に、車上に搭載された装置(以下、車上装置)で自列車位置を算出し、無線によって地上に設置された制御装置(以下、地上装置)に自列車位置を伝送し、地上装置はその列車が安全に進行できる限界地点を算出して列車に伝送する。この限界地点を停止目標とし、各列車は停止目標までに安全に停止できるように自列車を制御する。
【0004】
その位置推定手法としては速度発電機を利用した手法が広く用いられるが、車輪の空転や車輪径の変化等に起因し、推定位置の誤差は列車走行距離が延びるに従って蓄積される。蓄積される位置検知誤差を補正するため、トランスポンダが利用される。トランスポンダは位置情報を車上装置へ送信する装置であり、線路に沿って設置されている。トランスポンダの設置間隔から発生しうる位置誤差の最悪値を想定して安全のための余裕距離を固定的に設定し、停止目標が算出される。
【0005】
なお、トランスポンダの数が少なく間隔が広いと位置誤差が大きくなり、安全余裕距離も大きくなる。安全余裕距離が大きいと列車間隔の拡大による運行密度の低下などの課題が発生する。また、トランスポンダによる位置補正情報を車上装置が取りこぼした場合、位置誤差が大きくなり、設定された安全余裕距離では安全が保障されない。
【0006】
そこで、取りこぼしを考慮して、予め安全余裕距離をトランスポンダ2個分の走行を許容する値に設定し、2個連続で取りこぼした場合は、緊急停車により安全を確保していた。そのため、必要以上に安全余裕距離を長く設定する必要があったり、トランスポンダの異常で列車が停車したり、安全余裕距離を短くするためにトランスポンダの設置数が増加してコスト増を招くという問題があった。
【0007】
これを解決するための技術として、特許文献1に示すように、トランスポンダによる位置補正が行われなかった場合は安全余裕距離を一定量(次のトランスポンダ到着までに発生する誤差分)だけ増加させて走行する方式がある。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2010−120484号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
ただし、速度発電機やGPS(Global Positioning System)、加速度センサ、ドップラーレーダーなどの位置推定手法は、列車状態や周辺環境などによって推定精度が常に変化するため、走行前に適切な誤差を想定して安全余裕距離として設定する事が難しい。このため、過剰な安全余裕距離が設定される可能性がある。
【0010】
また、GPSの場合、位置推定精度を向上するための方式が多数提案されているが、マルチパス(障害物による反射)や電離層での伝搬遅延などの影響によって誤差が大きくなる可能性があり、GPSの最大誤差が保証されない。鉄道信号システムなど、位置情報が安全性に直結するアプリケーションにおいては、最大誤差が保証されない位置情報の利用は致命的な障害に繋がりうる。
【0011】
従来、GPSを用いた位置推定方式では4つのGPS衛星からGPSデータを受信し、GPSデータの送信時刻と受信時刻の差を元に、受信箇所の3次元位置(緯度、経度、高度)およびGPS受信部の時刻誤差補正を行っている。マルチパスや電離層での伝搬遅延が発生した場合、位置推定結果に誤差が含まれるため、マップマッチングを適用することで位置誤差を補正する方式がある。しかし、遅延誤差が大きい場合、誤った位置に補正する可能性がある。
【0012】
本発明の目的は、鉄道信号システムを適用対象とし、外部からのデータ(例えば、前記GPSからの時刻情報と位置情報)を用い列車在線範囲を算出して、安全な列車制御を可能とするシステムを提供することである。
【課題を解決するための手段】
【0013】
上記目的を達成するため、本発明の第1の特徴は、列車と列車の外部との間で情報を送受信し、該情報を元に列車の運行を制御する列車制御システムにおいて、位置情報と時刻情報からなる位置時刻情報を外部より受信する送受信部と、位置時刻情報を受信した車上時刻情報を計測する計測部と、前記位置時刻情報を受信した車上時刻情報とで列車の在線範囲情報を算出する在線範囲算出部と、列車の走行を制御する走行制御部とを有し、前記在線範囲情報により列車の走行開始、速度ないし停止を制御する列車制御システムである。
【0014】
上記目的を達成するため、本発明の第2の特徴は、列車と列車の外部との間で情報を送受信し、該情報を元に列車の運行を制御する列車制御システムにおいて、位置情報と時刻情報からなる位置時刻情報を外部より受信する送受信部と、位置時刻情報を受信した車上時刻情報を計測する計測部と、前記位置時刻情報を受信した車上時刻情報とで列車の在線範囲情報を算出する在線範囲算出部と、列車の走行を制御する走行制御部と有する列車と、前記在線範囲情報ないし前記位置時刻情報を列車の外部に送信し、前記在線範囲情報ないし前記位置時刻情報を受信する地上装置とを有し、前記地上装置は、送受信する地上通信部と、受信した前記在線範囲情報ないし前記位置時刻情報から列車制御情報を算出する列車制御情報算出部から構成され、前記列車制御情報を地上通信部から列車に送信し、該在線範囲情報ないし列車制御情報により列車の走行制御を行うこと列車制御システムである。
【発明の効果】
【0015】
本発明によれば、自列車や先行列車が受信する外部からのデータ受信時刻に遅延誤差が発生した場合でもその変化に追従し、列車の安全性・運行密度・省エネルギーの観点から最適な停止目標を算出可能な列車制御システムを実現できる。
【図面の簡単な説明】
【0016】
【図1】本発明の第1の実施例である列車制御システムの構成を示す図である。
【図2】本発明の第1の実施例での車上装置20における制御フローを示す図である。
【図3】本発明の第1の実施例での地上装置30における制御フローを示す図である。
【図4】本発明の第1の実施例での在線範囲イメージを示す概念図である。
【図5】本発明の第1の実施例での在線範囲算出方法を説明する図である。
【図6】本発明の第1の実施例で、GPSデータとマップ情報での在線範囲算出を説明する図である。
【図7】本発明の第1の実施例で、複数GPS衛星の送信データを利用した在線範囲算出を説明する図である。
【図8】本発明の第2の実施例である列車制御システムの構成を示す図である。
【図9】本発明の第3の実施例で、正常時のモニタ表示を示す図である。
【図10】本発明の第3の実施例で、異常検知時のモニタ表示を示す図である。
【図11】本発明の第3の実施例である列車制御システムの構成を示す図である。
【発明を実施するための形態】
【0017】
本発明を実施するための最良の形態例を説明する。
【実施例1】
【0018】
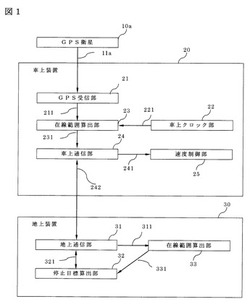
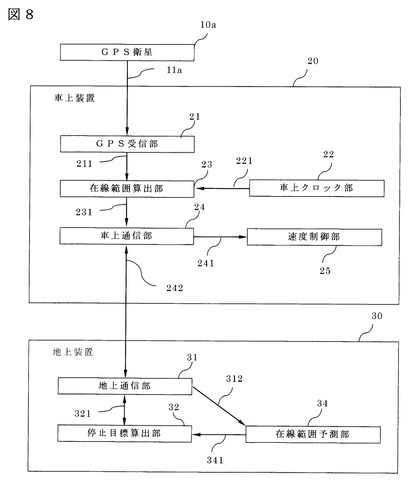
本発明の第1の実施形態について、図1ないし図7、図9を参照して説明する。図1に列車制御システムの構成を示す。図1で車上装置20は、GPS衛星10aが送信したGPSデータ11a(軌道情報、データ送信時刻情報)を受信するGPS受信部21と、GPSデータの受信時刻221を特定する車上クロック22と、GPS受信部21で受信したGPSデータ211と受信時刻221とで自列車の在線範囲情報231を算出する在線範囲算出部23を有する。
【0019】
さらに、在線範囲情報231の地上装置30への送信および地上装置30から送信された停止目標情報321などの情報の受信を行う車上通信部24と、受信した停止目標情報321により算出した速度制御信号241で列車の走行速度制御を行う速度制御部25を有する。
【0020】
また地上装置30は、各列車から送信された在線範囲情報の受信および停止目標情報321を該列車への送信を実行する地上通信部31と、同一走行路を走行する列車の在線範囲を元に各列車の停止目標を算出する停止目標算出部32により構成される。
【0021】
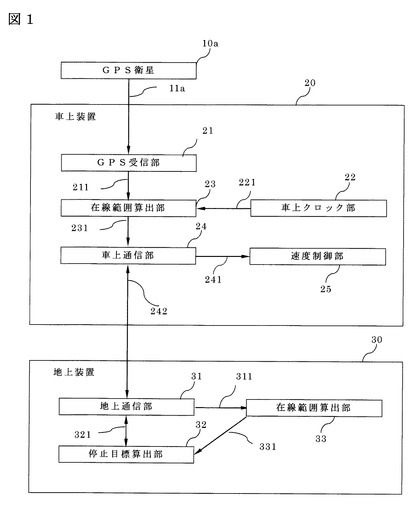
図2に車上装置20による制御フローを、図3に地上装置30による制御フローを示す。まず、車上装置20は地上装置30から停止目標が受信されたか確認する(ステップ9100)。受信されてない場合(Noに分岐)には、GPS受信部21によりGPSデータ11aを受信したか確認する(ステップ9102)。受信された場合(Yesに分岐)は、GPS受信部21が該GPSデータ11aを受信した時刻(GPSデータ受信時刻221)を車上クロック22より特定(ステップ9103)する。
【0022】
次に、在線範囲算出部23へ受信したGPSデータ211とGPSデータ受信時刻221を入力する(ステップ9104)。在線範囲算出部23では、入力データで該列車の在線範囲情報231を算出(ステップ9105)し、車上通信部24により地上装置30へ送信する(ステップ9106)。
【0023】
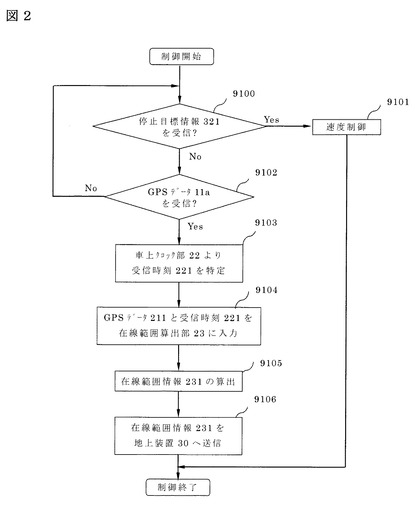
一方、図3に示すように地上装置30は、車上装置20の在線範囲算出部23で算出した在線範囲情報231を受信した場合(ステップ9200のYesに分岐)、同一走行路を走行する先行列車の在線範囲を考慮して該列車の停止目標情報321を算出(ステップ9201)し、地上通信部31経由で車上装置20へ送信する(ステップ9202)。次に、車上装置20は停止目標情報を受信したので、図2のステップ9100でNoに分岐し、ステップ9101の速度制御を実行し、自列車が停止目標へ安全に停止できるようにする。
【0024】
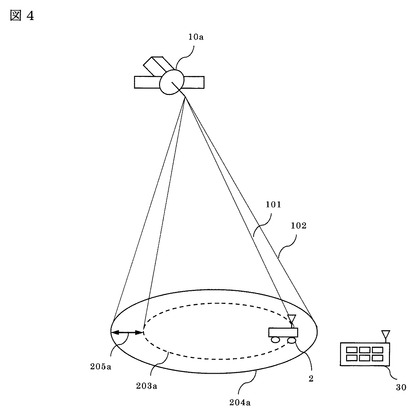
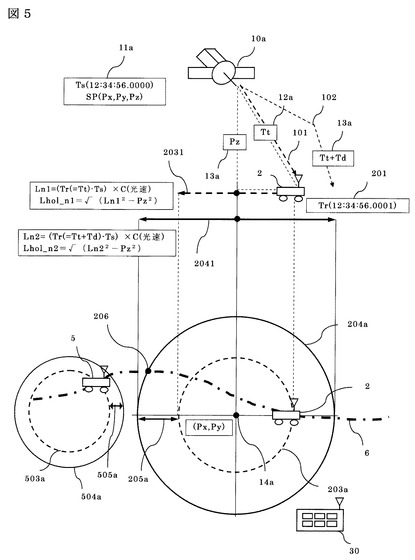
次に、在線範囲算出部23により在線範囲を算出するイメージを図4、図5に示す。以下、GPS衛星1aから列車2の車上装置20に搭載されるGPS受信部21までの距離を受信距離と呼び、図4では符号101が該当する。本方式では、少なくとも1つのGPS衛星1aから受信したGPSデータ11aに含まれるGPSデータ送信時刻Ts(HH:MM:SS.SSSS)と、GPS受信部21が該GPSデータを受信した受信時刻Trとの差を伝搬遅延時間Tt1とするので、
〔数式1〕
伝搬遅延時間Tt1=GPSデータ受信時刻Tr−GPSデータ送信時刻Tsと表され、その受信距離101は
〔数式2〕
Ln1=伝搬遅延時間Tt1×光速C
となる。
【0025】
その受信距離101を半径とした球体が地球表面(地面)と重なる円周部分が該列車の在線範囲となる。その円周部分は、GPS衛星1aから送信時刻情報Tsと共に送信された軌道情報PS(Px、Py、Pz)から算出する。中心座標14aは(Px、Py)で、
〔数式3〕
Lhol_n1=√(Ln12−Pz2)
なる半径(図5の2031)とした円203aの内周部分が在線範囲となる。
【0026】
しかしながら、高高度(数十Km上空)を周回するGPS衛星1aからの送信データは、電離層の影響や障害物を経由しての受信であるマルチパスなどにより、更なる伝搬遅延時間Tdが生じる。そのため、影響を考慮した伝搬遅延時間Tt2は
〔数式4〕
伝搬遅延時間Tt2=伝搬遅延時間Tt1+伝搬遅延時間Td
となり、擬似的な受信距離(以下、擬似距離)102は、
〔数式5〕
Ln2=伝搬遅延時間Tt2×光速C
となる。
【0027】
その擬似距離102を半径とした球体が地球表面(地面)と重なる円周部分が該列車の在線範囲であり、その中心座標14aは(Px、Py)で、
〔数式6〕
Lhol_n2=√(Ln22−Pz2)
なる半径(図5の2041)とした円204aの内周部分が在線範囲となる。
【0028】
次に、在線範囲204aの外側に該列車が在線していないことを保証する根拠を説明する。GPS衛星1aから受信したGPSデータに含まれる情報(軌道情報、GPSデータ送信時刻など)は正しいとし、さらに、GPS衛星1aが保持する時刻情報、車上装置20のクロックが保持する時刻も正しいものとする。
【0029】
マルチパスや電離層での伝搬遅延時間Tdが発生しない場合、疑似距離102と受信距離101は等しくなる。一方、マルチパスや電離層での伝搬遅延Tdが発生した場合、疑似距離102は受信距離101より大きくなる。これは、マルチパスや電離層での伝搬遅延Tdが発生しなかった場合よりも、マルチパスや電離層において伝搬遅延した分だけ受信時刻が遅延することに起因する。
【0030】
すなわち、マルチパスや電離層での伝搬遅延した場合、疑似距離は受信距離より大きくなるが、小さくなることは無い。すなわち、受信距離で求めた円周203aより、擬似距離より求めた円周204aの方が、205a分大きくなる。そのため、マルチパスや電離層などの伝搬遅延が発生したとしても、疑似距離より求めた円周の更に遠方に列車が在線していない、すなわち、必ず円周内に在線することが保証される。これは列車2だけでなく、同一線路6上を走行する他の列車5(GPS衛星1a以外のGPS衛星から受信する)でも受信距離で求めた円周503aより、擬似距離より求めた円周504aの方が、505a分大きくなる。
【0031】
在線範囲算出部23は、走行している線路6の2次元、もしくは3次元マップ情報を保持できる。また、列車2は線路6上のみを走行するという前提を元に、保持している該マップ情報を用いて、上記で算出した在線範囲内に含まれる線路上の範囲61のみを在線範囲として扱ってことで、より正確な在線範囲を特定できる。GPS衛星10aから受信したGPSデータ、およびマップ情報より在線範囲61を算出するイメージを図6に示す。ちなみに、マップ情報は地上装置30から無線ないし有線31経由で順次取り込んで走行状態の変化に追従できるようにすることも可能である。
【0032】
また、該マップ情報の精度に応じて、在線範囲を変更することも可能である。例えば、該マップ情報が一定の位置誤差を含む場合、その誤差を含む範囲を在線範囲として適用する。これにより、例えば、詳細なマップ情報を利用することで在線範囲を狭めることができ、高い運行密度が実現できる。一方、低密度な線区においては、詳細なマップが不要となるため、マップ作成の際の地形調査等に掛かるコストが低減できる。
【0033】
図1の在線範囲算出部23により列車在線範囲を算出する場合、例えば軌道回路、加速度センサ、ジャイロセンサ、速度発電機、トランスポンダ、バリス、無線LANの電波情報、超音波センサ、ドップラーレーダー、カメラ、赤外線センサ、車軸検知器(アクセルカウンター)のいずれかの装置を併用して算出することで、より正確な在線範囲を特定できる。在線範囲算出部23は、上記装置のうち1種類の装置を用いても、複数種類の装置を組み合わせて用いても良い。また、走行地点によって使用する装置を適宜使い分けことも可能である。さらに、従来の列車制御システムやカーナビゲーションシステムなどで幅広く利用されている位置特定技術を用いても良い。
【0034】
在線範囲算出部23において、GPS以外の装置を併用して在線範囲を算出する場合の一例として、速度発電機を併用した場合の処理を説明する。速度発電機は走行距離を測定するために用いられる装置であるが、走行中の滑走や車輪径の誤差等を要因とし、走行距離に比例して誤差が増加する。そのため、走行距離の数パーセント程度を誤差範囲として考慮し、在線範囲を算出する。GPSデータを用いて算出された在線範囲と、該速度発電機を用いて算出された在線範囲とが重複している範囲を在線範囲として算出することにより正確な在線範囲を把握できる。これにより、例えばトンネル内などの環境において、GPSデータの受信が困難な区域においても、速度発電機などの装置を併用して在線範囲を算出することで、在線範囲の急激な拡大を防止でき、列車運行の信頼性を確保できる。
【0035】
図1の速度制御部25により走行速度を制御する場合、列車の在線範囲、走行速度、停止目標までの距離、地形情報(走行路の曲率、勾配など)、車両性能(モータ性能、ブレーキ性能、重量など)のうち、少なくとも一つを用いて算出する。安全性を確保しつつ、運行密度や省エネルギーを考慮して走行速度を算出する方法として、駅間の速度制限を考慮した省エネルギー運転曲線を作成するものがある。
【0036】
停止目標算出部32により停止目標を算出する場合、例えば、図5のように同一走行路6を走行する先行列車50の在線範囲504aを算出し、自列車2の在線範囲204aから最も近い地点206を停止目標とする。本制御により、地上装置30は各列車の在線範囲の変化に応じた停止目標を設定する事ができ、要求される安全性を満たしつつ、各列車の在線範囲算出部23の性能に応じた列車制御が可能となる。また、地上装置30を介さずに、直接列車同士(例えば、図5の列車2と列車5)で在線範囲をやりとりして各列車の運行を制御することも可能である。
【0037】
前記手法により停止目標を算出する場合、周辺環境の変化等により、先行列車もしくは自列車におけるGPSデータの伝搬遅延誤差が増加すると、以前の停止目標の地点より、停止目標が進行方向に対して後方に下がる場合がある。この場合、状況によっては自列車が停止目標までに止まれず、非常ブレーキが掛かって乗り心地や省エネルギー性が著しく悪化する事が想定される。
【0038】
そのため、例えば、GPSデータの伝搬遅延誤差が増加して停止目標が現時点の停止目標より後方の地点を算出した場合、停止目標は更新せず、現時点の停止目標を引き続き使用する。例えばトンネル内など、GPSの受信環境が極端に劣化した場合、トンネル通過中はトンネル入り口近辺に停止目標が固定され、トンネル通過した時点でトンネル出口近辺に停止目標が移動する事となる。なお、先行列車が後退する可能性がある場合、後退する可能性のある距離を差し引いた地点を停止目標とすることで対応できる。
【0039】
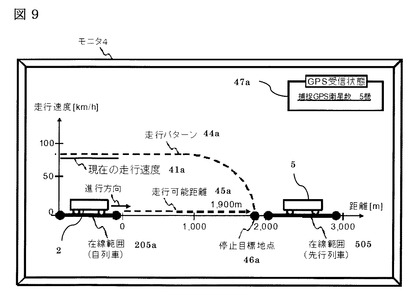
また、図9のように前記車上装置20もしくは前記地上装置30はモニタ4を備え、前記各装置の処理状況を表示する、もしくは音声にて処理状況を知らせる手段を備えることも可能である。上記では、地上装置30が停止目標情報を車上装置20へ送信するが、停止目標の代わりに各地点における該列車の制限速度を車上装置20へ送信しても良い。
【0040】
本実施例の構成では車上装置20が在線範囲算出部23を備えているが、在線範囲算出部23を地上装置30が備えても良い。その場合、車上装置20はGPS受信部21がGPSデータ11aを受信した後、該GPSデータ11aと該GPS受信部21による受信時刻情報221を地上装置30へ送信する。GPS以外の装置(例えば、上述した速度発電機、トランスポンダ等)を併用し、それらの装置より得られた情報も含め地上装置30へ送信して在線範囲を算出することも可能である。
【0041】
地上装置30は車上装置20から受け取った情報を在線範囲算出部33へ入力して在線範囲331を算出し、同一走行路を走行する先行列車の在線範囲を考慮して該列車の停止目標321を算出し、車上装置20へ送信する。以降の処理は上記構成における処理と同様とする。上記構成では、車上装置20は在線範囲算出部23を持つ必要がないので、車上装置20の構成を簡素化できる。
【0042】
地上装置30が在線範囲算出部33を有し、車上装置20では在線範囲算出部23を持たない構成では、地上装置30が車上装置20から送信された情報を使用して在線範囲を把握している。しかしながら、地上装置30が車上装置20から送信された情報以外の情報を使用して在線範囲を算出することも可能である。
【0043】
その構成は、車上装置20を経由せずに地上装置30へ直接、情報が入力される構成であり、その例示として、軌道回路やアクセルカウンターなどの地上側に設置された装置からの情報入力が挙げられる。本構成では、地上装置30は各列車の車上装置20から入力される情報以外にも、地上側に設置された上記装置により取得した情報を元に、在線範囲を算出し運行を制御する。
【0044】
以上、説明した列車制御システムでは米国のGPSを用いた場合を適用例として挙げているが、これ以外の全地域測位システム(例えば、欧州のGalileo、ロシアの
GLONASS、中国の北斗等)にも適用可能である。
【0045】
本実施例の構成では地上装置30が停止目標を算出しているが、車上装置20が停止目標を算出する構成としても良い。本構成では、例えば車上装置20は在線範囲算出部23、および停止目標算出部32を備える。本構成では、車上装置20は、在線範囲算出部23より自列車の在線範囲を算出し、同一走行路6を走行する他列車5に対して自列車の在線範囲204aを送信する。また同一走行路6を走行する他列車5より在線範囲504aを受信する。他列車5より在線範囲504aを受信した場合、自列車2の在線範囲204aから最も近い地点206を停止目標として算出し、自列車2の走行速度を制御する。
【0046】
本実施例の構成では車上装置20はGPS受信部21を1台備えて、1個以上のGPS衛星からのデータを受信できるようにしているが、複数のGPS受信部21を備えて各GPS受信部21が各GPS衛星に1対1で対応しデータを受信しても良い。また、GPS受信部21を1台備える車上装置20を列車車両1台毎に設け、その列車車両を複数連結して編成する列車2としても良い。
【0047】
また、在線範囲算出部23は、複数台のGPS受信部21が受信したGPSデータを元に在線範囲を算出することも可能である。それは、複数のGPS受信部21のGPSデータを元に在線範囲を算出する場合、各GPS受信部21の設置位置を事前に測定しておき、在線範囲を算出する際に相対位置関係をオフセットとして用いることで達成できる。
【0048】
例えば、編成長100メートルの列車の先端と後端にGPS受信部21を1台ずつ設置した場合、後端のGPS受信部21が受信したGPSデータより算出された在線範囲を、走行している線路の進行方向に沿って100メートル前方へ移動し、先端のGPS受信部21が受信したGPSデータより算出された在線範囲とを比較して重複部分を、該列車の先端が在線している範囲とすることも可能である。
【0049】
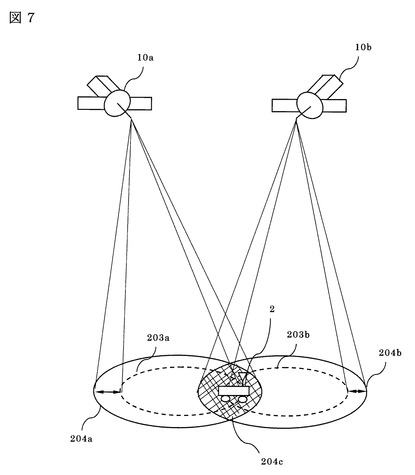
また、複数のGPS衛星からGPSデータを受信した場合、受信距離(ないしは擬似距離)による球体が地球地面と重複した円周部分をGPS衛星毎に算出して、その円周が全て重なり合う部分を在線範囲とする。複数のGPS衛星1から受信したGPSデータより在線範囲を算出するイメージを図7に示す。このように複数のGPS衛星から、軌道情報(位置情報)と時刻情報を受信することにより、より精度の高い在線範囲を特定できる。なお、列車2の外部から受信する情報を発信するものとして、GPS衛星としているがこれに限定されるものではない。
【実施例2】
【0050】
第1の実施例では、在線範囲算出部23は現時点で受信しているGPSデータを元に走行制御しており、これから先の走行における誤差変化は考慮していない。例えば、先行列車がトンネル内を通過する際はGPSデータ受信環境が急激に劣化するため、在線範囲が拡大し、後方の列車は急な減速が必要となる場合が考えられる。逆に、先行列車がトンネルを通過した際は、GPSデータ受信環境が急激に改善されて在線範囲が狭まることから、運行密度を上げるためには急な加速が必要となる。
【0051】
そこで、第2の実施例の構成では車上装置20もしくは地上装置30に、各列車の在線範囲の変化を予測する在線範囲予測部34を備える。図8に、地上装置30が在線範囲予測部34を備えた場合の構成を示す。地上装置30は在線範囲予測部34により予測した予測在線範囲を用い、未来のある時点における該列車の在線範囲を予測する。そして、同一時点において同一走行路を走行する先行列車の予測在線範囲を考慮して該列車の予測停止目標を算出し、車上装置20へ送信する。
【0052】
車上装置20は予測停止目標を受信した場合、自列車が上記時点において、予測停止目標へ安全かつ省エネルギー性を考慮して停止できるように走行速度を制御する。本構成により、GPSデータの受信環境が劣化することが事前に予測できる区域を先行列車が走行する場合、車上装置20は予測停止目標を元に速度を制御して走行することで、無駄な加減速を抑えた走行が可能となる。これにより、地上装置30は各車上装置20の在線範囲の将来の変化にも対応して停止目標を設定する事ができ、より安全性・運行密度・省エネルギー性を向上した列車制御が可能となる。
【0053】
様々な情報を元に逐次変化するデータの傾向を予測する方法は多くの手法が提案されており、例えばカルマンフィルターは、センサ情報を元に過去、現在、未来の各時点における目標物の位置を算出することにも用いられる。これらの方法を適用する事で、位置算出精度、および在線確率を算出する事が可能となる。
【0054】
在線範囲予測部34は、過去の走行時に取得した在線範囲の変化データを元に、将来の在線範囲を予測することもできる。なお、地上装置30に過去の走行において収集した各列車の在線範囲情報を記録するデータベースを備え、記録した該情報を元に在線範囲の変化を予測する前記在線範囲予測部34を備えても同様な効果が得られる。
【0055】
在線範囲予測部34に図6のようなマップ情報(トンネル位置、勾配、曲がり率など)を持たせ、そのマップ情報からGPS受信環境の変化を予測することも可能である。なお、地上装置30に走行路の地形データ、トランスポンダの設置位置データ、周辺の構造物データ(トンネル位置など)、走行ダイヤ、車両性能データ、GPS衛星データ、天候データのうち、少なくとも1つを記録するデータベースを備え、記録した該情報を元に在線範囲の変化を予測する前記在線範囲予測部34を備えても、前述と同様な予測効果が得られる。
【0056】
省エネルギーを考慮した列車走行を行う場合、無駄な加減速を減らし、惰行運転を増やす事が重要となる。在線範囲算出精度の変化により停止目標が大きく変動する環境では、停止目標に追従して速度を変更すると無駄な加減速が増え、省エネルギー性が低下する原因となる。前記在線範囲予測部34を用いることにより、停止目標の変動を予測する事が可能となるため、将来の停止目標の変動まで考慮して最適な走行速度を算出できる。
【実施例3】
【0057】
第1の実施例および第2の実施例では、GPS衛星1aが受信したGPSデータの軌道情報(位置情報)と送信時刻情報および車上装置20の車上クロックが特定する受信時刻情報は正しいものとして説明した。しかしながら、情報が誤っている可能性も考慮しなければならない。
【0058】
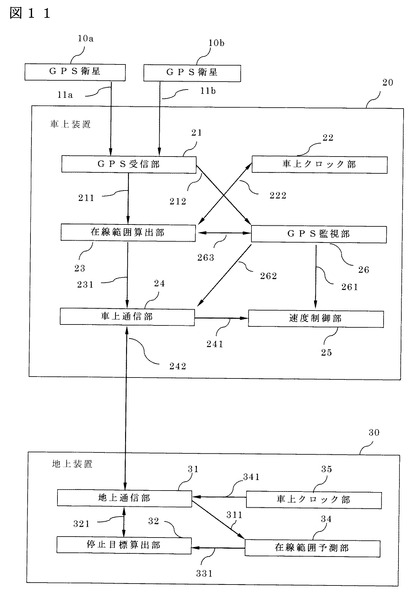
そこで、第3の実施例では車上装置20もしくは地上装置30にGPS衛星が送信するGPSデータを監視するGPS監視部26を備え、該GPSデータに含まれる情報(軌道情報、GPSデータ送信時刻など)に誤りが含まれている場合、車上装置20へ警報を出力する。車上装置20は警報を受信した場合、その誤りに応じて停止目標、在線範囲、制限速度のうち少なくとも1つを修正し、地上装置30への通知、および列車制御を実行する。
【0059】
車上装置20がGPS監視部26を備えた場合の構成を図11に示す。GPS監視部26が誤りを検知する方法として、例えば正確なクロックをもち座標のわかっている固定局を設置し、GPS受信データから計算した位置と固定局の位置の差から精度を上げる仕組みであるDifferential GPS(以下DGPS)や、静止衛星型衛星航法補強システム(Satellite−based Augmentation System)などを利用する。
【0060】
車上クロック22の時刻誤差を補正する方法として、4つのGPS衛星から受信したGPSデータを用いて時刻補正する方式が一般的に採用される。しかし、マルチパス等の伝搬遅延誤差が含まれるため、GPSデータによる時刻補正では十分な安全性が保証できない可能性がある。そこで、本発明では、受信したGPSデータより在線範囲を算出する際、車上装置20は正確なクロックを保持する地上装置30と通信し、その受信した正確なクロック情報222で車上クロック22の時刻誤差を補正する。
【0061】
なお、地上装置30は前記DGPSや図6のようにネットワーク70への接続機器が持つ時計を正確な時刻へ同期させる通信プロトコルであるNTP(Network Time Protocol)などで正確なクロックを保持する。
【0062】
時刻を補正しても時間経過で、再度、車上クロック22の時刻に誤差が生じてくる。そこで、本発明での在線範囲算出部23は該車上クロック22のメーカーの公称誤差を保持して、時刻補正した時刻とGPSデータ受信時刻の差で拡大した在線範囲を算出することも可能である。
【0063】
例えば、公称誤差が±1ppmの車上クロック22を用い、GPSデータを受信してから200ミリ秒後に時刻補正した場合、車上クロック22は200ミリ秒の間に最大500万分の1秒ずれる。電波は500万分の1秒間で約60メートル進むため、在線範囲算出部23は疑似距離を60メートル拡大したもので在線範囲を算出する。
【0064】
車上クロック22の時刻誤差を補正する方法として、従来から一般的に採用されているGPS衛星から受信したGPSデータを用いて時刻補正する方式を採用しても良い。GPS衛星を用いた場合、受信地点の座標値および補正時刻が算出される。そのマルチパス等の伝搬遅延誤差による時刻補正誤りを防ぐため、GPSデータより算出された受信地点の座標値と速度発電機など別の位置推定方式で求めた在線地点の座標値とを比較し、そのずれを元に時刻補正の信頼性を検証する。
【0065】
また、GPSデータに含まれる情報(軌道情報、GPSデータ送信時刻など)は誤っていない、かつGPS衛星が保持する時刻情報、および車上装置20のクロックが特定する受信時刻が正しい前提では、GPSデータより得られた在線範囲内に該列車が在線する。そのため、図7のように、複数のGPS衛星より同一時間帯に受信したGPSデータを用いて在線範囲を算出する場合、該GPSデータより算出された在線範囲が全て重複する箇所が必ず存在する。
【0066】
しかし、前記前提が成立しなくなった場合、在線範囲が一部重複しない箇所が発生する可能性がある。これは、車上クロック22が正常なクロックよりも早く動作し、疑似距離が受信距離より短くなることで発生する。
【0067】
そこで、前記GPS監視部26は、各GPSデータからの受信データ211より算出された在線範囲263を比較し、該GPSデータより算出された在線範囲が全て重複する箇所(例えば、図7の204c)が存在することを確認する。重複しない箇所が1つでも存在する場合、GPSデータの誤り、もしくは車上クロック22の異常と判断し、警報情報262として車上装置20ないし地上装置30へ出力する。本構成により、GPSの異常を即座に検知できる。
【0068】
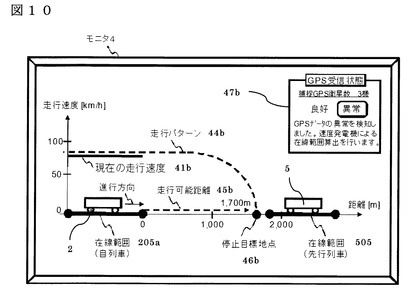
同時に速度制御情報261を速度制御部25に出力し、列車2の減速(走行速度を図9の41aから図10の41bへ変更し、同じく走行パターンも44aから44bへ変更)、停止目標地点の変更(46aから46bへ200m手前に設け、走行可能距離も45aの1900mから45bの1700mとする)ないし緊急停止を実行する。
【0069】
また、GPS監視部26はGPS受信部21で受信した受信情報212(受信衛星数、受信感度など)を監視する。例えば、図9の47aのように、正常時に捕捉しているGPS衛星数は5個であるのに対し、異常時は図10の47bのように3個しか捕捉できていない場合である。この場合でも前述のように異常通知ないし運行制御が可能である。
さらに、前記車上装置20もしくは前記地上装置30はモニタ4で状態を把握できるので、その原因特定や手動での列車運行制御(減速、停止目標の変更など)が可能となる。
【産業上の利用可能性】
【0070】
以上の実施例では列車制御システムを対象として説明したが、同様な構成で航空機運行制御、自動車制御、エレベータ制御などの移動体制御システムにおいても、本発明を適用可能である。
【符号の説明】
【0071】
10a、10b GPS衛星
101 受信距離
102 擬似距離
2、5 列車
20 車上装置
21 GPS受信部
22 車上クロック部
23 在線範囲算出部
24 車上通信部
25 速度制御部
26 GPS監視部
27 マップ情報部
204a、204b、203c、504a 在線範囲
30 地上装置
31 地上通信部
32 停止目標算出部
33 在線範囲算出部
34 在線範囲予測部
35 地上クロック部
4 モニタ
6 線路
61 在線範囲
【技術分野】
【0001】
本発明は、各列車が算出した列車位置に基づいて列車制御を行うシステムとその方法に関する。
【背景技術】
【0002】
鉄道システムでは、列車同士が衝突しないように鉄道信号システムによって走行制御している。従来の軌道回路を用いた信号システムでは、1軌道回路に1列車の在線だけを許可することで、列車間の安全を確保している。このため、軌道回路の長短で通常運行の列車間隔が決まる。高密度運行を行うためには列車間隔を縮める必要がある事から、短い軌道回路を用いることになる。ただし、軌道回路は数100mおきに設備を設置する必要があり、設備の導入・保守費用が高くなるという欠点を持っている。
【0003】
また、信号システムを含む鉄道保安システムにおいては、コスト削減や列車制御の高機能化という観点から、軌道回路によらずに列車制御する方式として、無線信号方式が検討されている。無線信号方式では、一般に、車上に搭載された装置(以下、車上装置)で自列車位置を算出し、無線によって地上に設置された制御装置(以下、地上装置)に自列車位置を伝送し、地上装置はその列車が安全に進行できる限界地点を算出して列車に伝送する。この限界地点を停止目標とし、各列車は停止目標までに安全に停止できるように自列車を制御する。
【0004】
その位置推定手法としては速度発電機を利用した手法が広く用いられるが、車輪の空転や車輪径の変化等に起因し、推定位置の誤差は列車走行距離が延びるに従って蓄積される。蓄積される位置検知誤差を補正するため、トランスポンダが利用される。トランスポンダは位置情報を車上装置へ送信する装置であり、線路に沿って設置されている。トランスポンダの設置間隔から発生しうる位置誤差の最悪値を想定して安全のための余裕距離を固定的に設定し、停止目標が算出される。
【0005】
なお、トランスポンダの数が少なく間隔が広いと位置誤差が大きくなり、安全余裕距離も大きくなる。安全余裕距離が大きいと列車間隔の拡大による運行密度の低下などの課題が発生する。また、トランスポンダによる位置補正情報を車上装置が取りこぼした場合、位置誤差が大きくなり、設定された安全余裕距離では安全が保障されない。
【0006】
そこで、取りこぼしを考慮して、予め安全余裕距離をトランスポンダ2個分の走行を許容する値に設定し、2個連続で取りこぼした場合は、緊急停車により安全を確保していた。そのため、必要以上に安全余裕距離を長く設定する必要があったり、トランスポンダの異常で列車が停車したり、安全余裕距離を短くするためにトランスポンダの設置数が増加してコスト増を招くという問題があった。
【0007】
これを解決するための技術として、特許文献1に示すように、トランスポンダによる位置補正が行われなかった場合は安全余裕距離を一定量(次のトランスポンダ到着までに発生する誤差分)だけ増加させて走行する方式がある。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2010−120484号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
ただし、速度発電機やGPS(Global Positioning System)、加速度センサ、ドップラーレーダーなどの位置推定手法は、列車状態や周辺環境などによって推定精度が常に変化するため、走行前に適切な誤差を想定して安全余裕距離として設定する事が難しい。このため、過剰な安全余裕距離が設定される可能性がある。
【0010】
また、GPSの場合、位置推定精度を向上するための方式が多数提案されているが、マルチパス(障害物による反射)や電離層での伝搬遅延などの影響によって誤差が大きくなる可能性があり、GPSの最大誤差が保証されない。鉄道信号システムなど、位置情報が安全性に直結するアプリケーションにおいては、最大誤差が保証されない位置情報の利用は致命的な障害に繋がりうる。
【0011】
従来、GPSを用いた位置推定方式では4つのGPS衛星からGPSデータを受信し、GPSデータの送信時刻と受信時刻の差を元に、受信箇所の3次元位置(緯度、経度、高度)およびGPS受信部の時刻誤差補正を行っている。マルチパスや電離層での伝搬遅延が発生した場合、位置推定結果に誤差が含まれるため、マップマッチングを適用することで位置誤差を補正する方式がある。しかし、遅延誤差が大きい場合、誤った位置に補正する可能性がある。
【0012】
本発明の目的は、鉄道信号システムを適用対象とし、外部からのデータ(例えば、前記GPSからの時刻情報と位置情報)を用い列車在線範囲を算出して、安全な列車制御を可能とするシステムを提供することである。
【課題を解決するための手段】
【0013】
上記目的を達成するため、本発明の第1の特徴は、列車と列車の外部との間で情報を送受信し、該情報を元に列車の運行を制御する列車制御システムにおいて、位置情報と時刻情報からなる位置時刻情報を外部より受信する送受信部と、位置時刻情報を受信した車上時刻情報を計測する計測部と、前記位置時刻情報を受信した車上時刻情報とで列車の在線範囲情報を算出する在線範囲算出部と、列車の走行を制御する走行制御部とを有し、前記在線範囲情報により列車の走行開始、速度ないし停止を制御する列車制御システムである。
【0014】
上記目的を達成するため、本発明の第2の特徴は、列車と列車の外部との間で情報を送受信し、該情報を元に列車の運行を制御する列車制御システムにおいて、位置情報と時刻情報からなる位置時刻情報を外部より受信する送受信部と、位置時刻情報を受信した車上時刻情報を計測する計測部と、前記位置時刻情報を受信した車上時刻情報とで列車の在線範囲情報を算出する在線範囲算出部と、列車の走行を制御する走行制御部と有する列車と、前記在線範囲情報ないし前記位置時刻情報を列車の外部に送信し、前記在線範囲情報ないし前記位置時刻情報を受信する地上装置とを有し、前記地上装置は、送受信する地上通信部と、受信した前記在線範囲情報ないし前記位置時刻情報から列車制御情報を算出する列車制御情報算出部から構成され、前記列車制御情報を地上通信部から列車に送信し、該在線範囲情報ないし列車制御情報により列車の走行制御を行うこと列車制御システムである。
【発明の効果】
【0015】
本発明によれば、自列車や先行列車が受信する外部からのデータ受信時刻に遅延誤差が発生した場合でもその変化に追従し、列車の安全性・運行密度・省エネルギーの観点から最適な停止目標を算出可能な列車制御システムを実現できる。
【図面の簡単な説明】
【0016】
【図1】本発明の第1の実施例である列車制御システムの構成を示す図である。
【図2】本発明の第1の実施例での車上装置20における制御フローを示す図である。
【図3】本発明の第1の実施例での地上装置30における制御フローを示す図である。
【図4】本発明の第1の実施例での在線範囲イメージを示す概念図である。
【図5】本発明の第1の実施例での在線範囲算出方法を説明する図である。
【図6】本発明の第1の実施例で、GPSデータとマップ情報での在線範囲算出を説明する図である。
【図7】本発明の第1の実施例で、複数GPS衛星の送信データを利用した在線範囲算出を説明する図である。
【図8】本発明の第2の実施例である列車制御システムの構成を示す図である。
【図9】本発明の第3の実施例で、正常時のモニタ表示を示す図である。
【図10】本発明の第3の実施例で、異常検知時のモニタ表示を示す図である。
【図11】本発明の第3の実施例である列車制御システムの構成を示す図である。
【発明を実施するための形態】
【0017】
本発明を実施するための最良の形態例を説明する。
【実施例1】
【0018】
本発明の第1の実施形態について、図1ないし図7、図9を参照して説明する。図1に列車制御システムの構成を示す。図1で車上装置20は、GPS衛星10aが送信したGPSデータ11a(軌道情報、データ送信時刻情報)を受信するGPS受信部21と、GPSデータの受信時刻221を特定する車上クロック22と、GPS受信部21で受信したGPSデータ211と受信時刻221とで自列車の在線範囲情報231を算出する在線範囲算出部23を有する。
【0019】
さらに、在線範囲情報231の地上装置30への送信および地上装置30から送信された停止目標情報321などの情報の受信を行う車上通信部24と、受信した停止目標情報321により算出した速度制御信号241で列車の走行速度制御を行う速度制御部25を有する。
【0020】
また地上装置30は、各列車から送信された在線範囲情報の受信および停止目標情報321を該列車への送信を実行する地上通信部31と、同一走行路を走行する列車の在線範囲を元に各列車の停止目標を算出する停止目標算出部32により構成される。
【0021】
図2に車上装置20による制御フローを、図3に地上装置30による制御フローを示す。まず、車上装置20は地上装置30から停止目標が受信されたか確認する(ステップ9100)。受信されてない場合(Noに分岐)には、GPS受信部21によりGPSデータ11aを受信したか確認する(ステップ9102)。受信された場合(Yesに分岐)は、GPS受信部21が該GPSデータ11aを受信した時刻(GPSデータ受信時刻221)を車上クロック22より特定(ステップ9103)する。
【0022】
次に、在線範囲算出部23へ受信したGPSデータ211とGPSデータ受信時刻221を入力する(ステップ9104)。在線範囲算出部23では、入力データで該列車の在線範囲情報231を算出(ステップ9105)し、車上通信部24により地上装置30へ送信する(ステップ9106)。
【0023】
一方、図3に示すように地上装置30は、車上装置20の在線範囲算出部23で算出した在線範囲情報231を受信した場合(ステップ9200のYesに分岐)、同一走行路を走行する先行列車の在線範囲を考慮して該列車の停止目標情報321を算出(ステップ9201)し、地上通信部31経由で車上装置20へ送信する(ステップ9202)。次に、車上装置20は停止目標情報を受信したので、図2のステップ9100でNoに分岐し、ステップ9101の速度制御を実行し、自列車が停止目標へ安全に停止できるようにする。
【0024】
次に、在線範囲算出部23により在線範囲を算出するイメージを図4、図5に示す。以下、GPS衛星1aから列車2の車上装置20に搭載されるGPS受信部21までの距離を受信距離と呼び、図4では符号101が該当する。本方式では、少なくとも1つのGPS衛星1aから受信したGPSデータ11aに含まれるGPSデータ送信時刻Ts(HH:MM:SS.SSSS)と、GPS受信部21が該GPSデータを受信した受信時刻Trとの差を伝搬遅延時間Tt1とするので、
〔数式1〕
伝搬遅延時間Tt1=GPSデータ受信時刻Tr−GPSデータ送信時刻Tsと表され、その受信距離101は
〔数式2〕
Ln1=伝搬遅延時間Tt1×光速C
となる。
【0025】
その受信距離101を半径とした球体が地球表面(地面)と重なる円周部分が該列車の在線範囲となる。その円周部分は、GPS衛星1aから送信時刻情報Tsと共に送信された軌道情報PS(Px、Py、Pz)から算出する。中心座標14aは(Px、Py)で、
〔数式3〕
Lhol_n1=√(Ln12−Pz2)
なる半径(図5の2031)とした円203aの内周部分が在線範囲となる。
【0026】
しかしながら、高高度(数十Km上空)を周回するGPS衛星1aからの送信データは、電離層の影響や障害物を経由しての受信であるマルチパスなどにより、更なる伝搬遅延時間Tdが生じる。そのため、影響を考慮した伝搬遅延時間Tt2は
〔数式4〕
伝搬遅延時間Tt2=伝搬遅延時間Tt1+伝搬遅延時間Td
となり、擬似的な受信距離(以下、擬似距離)102は、
〔数式5〕
Ln2=伝搬遅延時間Tt2×光速C
となる。
【0027】
その擬似距離102を半径とした球体が地球表面(地面)と重なる円周部分が該列車の在線範囲であり、その中心座標14aは(Px、Py)で、
〔数式6〕
Lhol_n2=√(Ln22−Pz2)
なる半径(図5の2041)とした円204aの内周部分が在線範囲となる。
【0028】
次に、在線範囲204aの外側に該列車が在線していないことを保証する根拠を説明する。GPS衛星1aから受信したGPSデータに含まれる情報(軌道情報、GPSデータ送信時刻など)は正しいとし、さらに、GPS衛星1aが保持する時刻情報、車上装置20のクロックが保持する時刻も正しいものとする。
【0029】
マルチパスや電離層での伝搬遅延時間Tdが発生しない場合、疑似距離102と受信距離101は等しくなる。一方、マルチパスや電離層での伝搬遅延Tdが発生した場合、疑似距離102は受信距離101より大きくなる。これは、マルチパスや電離層での伝搬遅延Tdが発生しなかった場合よりも、マルチパスや電離層において伝搬遅延した分だけ受信時刻が遅延することに起因する。
【0030】
すなわち、マルチパスや電離層での伝搬遅延した場合、疑似距離は受信距離より大きくなるが、小さくなることは無い。すなわち、受信距離で求めた円周203aより、擬似距離より求めた円周204aの方が、205a分大きくなる。そのため、マルチパスや電離層などの伝搬遅延が発生したとしても、疑似距離より求めた円周の更に遠方に列車が在線していない、すなわち、必ず円周内に在線することが保証される。これは列車2だけでなく、同一線路6上を走行する他の列車5(GPS衛星1a以外のGPS衛星から受信する)でも受信距離で求めた円周503aより、擬似距離より求めた円周504aの方が、505a分大きくなる。
【0031】
在線範囲算出部23は、走行している線路6の2次元、もしくは3次元マップ情報を保持できる。また、列車2は線路6上のみを走行するという前提を元に、保持している該マップ情報を用いて、上記で算出した在線範囲内に含まれる線路上の範囲61のみを在線範囲として扱ってことで、より正確な在線範囲を特定できる。GPS衛星10aから受信したGPSデータ、およびマップ情報より在線範囲61を算出するイメージを図6に示す。ちなみに、マップ情報は地上装置30から無線ないし有線31経由で順次取り込んで走行状態の変化に追従できるようにすることも可能である。
【0032】
また、該マップ情報の精度に応じて、在線範囲を変更することも可能である。例えば、該マップ情報が一定の位置誤差を含む場合、その誤差を含む範囲を在線範囲として適用する。これにより、例えば、詳細なマップ情報を利用することで在線範囲を狭めることができ、高い運行密度が実現できる。一方、低密度な線区においては、詳細なマップが不要となるため、マップ作成の際の地形調査等に掛かるコストが低減できる。
【0033】
図1の在線範囲算出部23により列車在線範囲を算出する場合、例えば軌道回路、加速度センサ、ジャイロセンサ、速度発電機、トランスポンダ、バリス、無線LANの電波情報、超音波センサ、ドップラーレーダー、カメラ、赤外線センサ、車軸検知器(アクセルカウンター)のいずれかの装置を併用して算出することで、より正確な在線範囲を特定できる。在線範囲算出部23は、上記装置のうち1種類の装置を用いても、複数種類の装置を組み合わせて用いても良い。また、走行地点によって使用する装置を適宜使い分けことも可能である。さらに、従来の列車制御システムやカーナビゲーションシステムなどで幅広く利用されている位置特定技術を用いても良い。
【0034】
在線範囲算出部23において、GPS以外の装置を併用して在線範囲を算出する場合の一例として、速度発電機を併用した場合の処理を説明する。速度発電機は走行距離を測定するために用いられる装置であるが、走行中の滑走や車輪径の誤差等を要因とし、走行距離に比例して誤差が増加する。そのため、走行距離の数パーセント程度を誤差範囲として考慮し、在線範囲を算出する。GPSデータを用いて算出された在線範囲と、該速度発電機を用いて算出された在線範囲とが重複している範囲を在線範囲として算出することにより正確な在線範囲を把握できる。これにより、例えばトンネル内などの環境において、GPSデータの受信が困難な区域においても、速度発電機などの装置を併用して在線範囲を算出することで、在線範囲の急激な拡大を防止でき、列車運行の信頼性を確保できる。
【0035】
図1の速度制御部25により走行速度を制御する場合、列車の在線範囲、走行速度、停止目標までの距離、地形情報(走行路の曲率、勾配など)、車両性能(モータ性能、ブレーキ性能、重量など)のうち、少なくとも一つを用いて算出する。安全性を確保しつつ、運行密度や省エネルギーを考慮して走行速度を算出する方法として、駅間の速度制限を考慮した省エネルギー運転曲線を作成するものがある。
【0036】
停止目標算出部32により停止目標を算出する場合、例えば、図5のように同一走行路6を走行する先行列車50の在線範囲504aを算出し、自列車2の在線範囲204aから最も近い地点206を停止目標とする。本制御により、地上装置30は各列車の在線範囲の変化に応じた停止目標を設定する事ができ、要求される安全性を満たしつつ、各列車の在線範囲算出部23の性能に応じた列車制御が可能となる。また、地上装置30を介さずに、直接列車同士(例えば、図5の列車2と列車5)で在線範囲をやりとりして各列車の運行を制御することも可能である。
【0037】
前記手法により停止目標を算出する場合、周辺環境の変化等により、先行列車もしくは自列車におけるGPSデータの伝搬遅延誤差が増加すると、以前の停止目標の地点より、停止目標が進行方向に対して後方に下がる場合がある。この場合、状況によっては自列車が停止目標までに止まれず、非常ブレーキが掛かって乗り心地や省エネルギー性が著しく悪化する事が想定される。
【0038】
そのため、例えば、GPSデータの伝搬遅延誤差が増加して停止目標が現時点の停止目標より後方の地点を算出した場合、停止目標は更新せず、現時点の停止目標を引き続き使用する。例えばトンネル内など、GPSの受信環境が極端に劣化した場合、トンネル通過中はトンネル入り口近辺に停止目標が固定され、トンネル通過した時点でトンネル出口近辺に停止目標が移動する事となる。なお、先行列車が後退する可能性がある場合、後退する可能性のある距離を差し引いた地点を停止目標とすることで対応できる。
【0039】
また、図9のように前記車上装置20もしくは前記地上装置30はモニタ4を備え、前記各装置の処理状況を表示する、もしくは音声にて処理状況を知らせる手段を備えることも可能である。上記では、地上装置30が停止目標情報を車上装置20へ送信するが、停止目標の代わりに各地点における該列車の制限速度を車上装置20へ送信しても良い。
【0040】
本実施例の構成では車上装置20が在線範囲算出部23を備えているが、在線範囲算出部23を地上装置30が備えても良い。その場合、車上装置20はGPS受信部21がGPSデータ11aを受信した後、該GPSデータ11aと該GPS受信部21による受信時刻情報221を地上装置30へ送信する。GPS以外の装置(例えば、上述した速度発電機、トランスポンダ等)を併用し、それらの装置より得られた情報も含め地上装置30へ送信して在線範囲を算出することも可能である。
【0041】
地上装置30は車上装置20から受け取った情報を在線範囲算出部33へ入力して在線範囲331を算出し、同一走行路を走行する先行列車の在線範囲を考慮して該列車の停止目標321を算出し、車上装置20へ送信する。以降の処理は上記構成における処理と同様とする。上記構成では、車上装置20は在線範囲算出部23を持つ必要がないので、車上装置20の構成を簡素化できる。
【0042】
地上装置30が在線範囲算出部33を有し、車上装置20では在線範囲算出部23を持たない構成では、地上装置30が車上装置20から送信された情報を使用して在線範囲を把握している。しかしながら、地上装置30が車上装置20から送信された情報以外の情報を使用して在線範囲を算出することも可能である。
【0043】
その構成は、車上装置20を経由せずに地上装置30へ直接、情報が入力される構成であり、その例示として、軌道回路やアクセルカウンターなどの地上側に設置された装置からの情報入力が挙げられる。本構成では、地上装置30は各列車の車上装置20から入力される情報以外にも、地上側に設置された上記装置により取得した情報を元に、在線範囲を算出し運行を制御する。
【0044】
以上、説明した列車制御システムでは米国のGPSを用いた場合を適用例として挙げているが、これ以外の全地域測位システム(例えば、欧州のGalileo、ロシアの
GLONASS、中国の北斗等)にも適用可能である。
【0045】
本実施例の構成では地上装置30が停止目標を算出しているが、車上装置20が停止目標を算出する構成としても良い。本構成では、例えば車上装置20は在線範囲算出部23、および停止目標算出部32を備える。本構成では、車上装置20は、在線範囲算出部23より自列車の在線範囲を算出し、同一走行路6を走行する他列車5に対して自列車の在線範囲204aを送信する。また同一走行路6を走行する他列車5より在線範囲504aを受信する。他列車5より在線範囲504aを受信した場合、自列車2の在線範囲204aから最も近い地点206を停止目標として算出し、自列車2の走行速度を制御する。
【0046】
本実施例の構成では車上装置20はGPS受信部21を1台備えて、1個以上のGPS衛星からのデータを受信できるようにしているが、複数のGPS受信部21を備えて各GPS受信部21が各GPS衛星に1対1で対応しデータを受信しても良い。また、GPS受信部21を1台備える車上装置20を列車車両1台毎に設け、その列車車両を複数連結して編成する列車2としても良い。
【0047】
また、在線範囲算出部23は、複数台のGPS受信部21が受信したGPSデータを元に在線範囲を算出することも可能である。それは、複数のGPS受信部21のGPSデータを元に在線範囲を算出する場合、各GPS受信部21の設置位置を事前に測定しておき、在線範囲を算出する際に相対位置関係をオフセットとして用いることで達成できる。
【0048】
例えば、編成長100メートルの列車の先端と後端にGPS受信部21を1台ずつ設置した場合、後端のGPS受信部21が受信したGPSデータより算出された在線範囲を、走行している線路の進行方向に沿って100メートル前方へ移動し、先端のGPS受信部21が受信したGPSデータより算出された在線範囲とを比較して重複部分を、該列車の先端が在線している範囲とすることも可能である。
【0049】
また、複数のGPS衛星からGPSデータを受信した場合、受信距離(ないしは擬似距離)による球体が地球地面と重複した円周部分をGPS衛星毎に算出して、その円周が全て重なり合う部分を在線範囲とする。複数のGPS衛星1から受信したGPSデータより在線範囲を算出するイメージを図7に示す。このように複数のGPS衛星から、軌道情報(位置情報)と時刻情報を受信することにより、より精度の高い在線範囲を特定できる。なお、列車2の外部から受信する情報を発信するものとして、GPS衛星としているがこれに限定されるものではない。
【実施例2】
【0050】
第1の実施例では、在線範囲算出部23は現時点で受信しているGPSデータを元に走行制御しており、これから先の走行における誤差変化は考慮していない。例えば、先行列車がトンネル内を通過する際はGPSデータ受信環境が急激に劣化するため、在線範囲が拡大し、後方の列車は急な減速が必要となる場合が考えられる。逆に、先行列車がトンネルを通過した際は、GPSデータ受信環境が急激に改善されて在線範囲が狭まることから、運行密度を上げるためには急な加速が必要となる。
【0051】
そこで、第2の実施例の構成では車上装置20もしくは地上装置30に、各列車の在線範囲の変化を予測する在線範囲予測部34を備える。図8に、地上装置30が在線範囲予測部34を備えた場合の構成を示す。地上装置30は在線範囲予測部34により予測した予測在線範囲を用い、未来のある時点における該列車の在線範囲を予測する。そして、同一時点において同一走行路を走行する先行列車の予測在線範囲を考慮して該列車の予測停止目標を算出し、車上装置20へ送信する。
【0052】
車上装置20は予測停止目標を受信した場合、自列車が上記時点において、予測停止目標へ安全かつ省エネルギー性を考慮して停止できるように走行速度を制御する。本構成により、GPSデータの受信環境が劣化することが事前に予測できる区域を先行列車が走行する場合、車上装置20は予測停止目標を元に速度を制御して走行することで、無駄な加減速を抑えた走行が可能となる。これにより、地上装置30は各車上装置20の在線範囲の将来の変化にも対応して停止目標を設定する事ができ、より安全性・運行密度・省エネルギー性を向上した列車制御が可能となる。
【0053】
様々な情報を元に逐次変化するデータの傾向を予測する方法は多くの手法が提案されており、例えばカルマンフィルターは、センサ情報を元に過去、現在、未来の各時点における目標物の位置を算出することにも用いられる。これらの方法を適用する事で、位置算出精度、および在線確率を算出する事が可能となる。
【0054】
在線範囲予測部34は、過去の走行時に取得した在線範囲の変化データを元に、将来の在線範囲を予測することもできる。なお、地上装置30に過去の走行において収集した各列車の在線範囲情報を記録するデータベースを備え、記録した該情報を元に在線範囲の変化を予測する前記在線範囲予測部34を備えても同様な効果が得られる。
【0055】
在線範囲予測部34に図6のようなマップ情報(トンネル位置、勾配、曲がり率など)を持たせ、そのマップ情報からGPS受信環境の変化を予測することも可能である。なお、地上装置30に走行路の地形データ、トランスポンダの設置位置データ、周辺の構造物データ(トンネル位置など)、走行ダイヤ、車両性能データ、GPS衛星データ、天候データのうち、少なくとも1つを記録するデータベースを備え、記録した該情報を元に在線範囲の変化を予測する前記在線範囲予測部34を備えても、前述と同様な予測効果が得られる。
【0056】
省エネルギーを考慮した列車走行を行う場合、無駄な加減速を減らし、惰行運転を増やす事が重要となる。在線範囲算出精度の変化により停止目標が大きく変動する環境では、停止目標に追従して速度を変更すると無駄な加減速が増え、省エネルギー性が低下する原因となる。前記在線範囲予測部34を用いることにより、停止目標の変動を予測する事が可能となるため、将来の停止目標の変動まで考慮して最適な走行速度を算出できる。
【実施例3】
【0057】
第1の実施例および第2の実施例では、GPS衛星1aが受信したGPSデータの軌道情報(位置情報)と送信時刻情報および車上装置20の車上クロックが特定する受信時刻情報は正しいものとして説明した。しかしながら、情報が誤っている可能性も考慮しなければならない。
【0058】
そこで、第3の実施例では車上装置20もしくは地上装置30にGPS衛星が送信するGPSデータを監視するGPS監視部26を備え、該GPSデータに含まれる情報(軌道情報、GPSデータ送信時刻など)に誤りが含まれている場合、車上装置20へ警報を出力する。車上装置20は警報を受信した場合、その誤りに応じて停止目標、在線範囲、制限速度のうち少なくとも1つを修正し、地上装置30への通知、および列車制御を実行する。
【0059】
車上装置20がGPS監視部26を備えた場合の構成を図11に示す。GPS監視部26が誤りを検知する方法として、例えば正確なクロックをもち座標のわかっている固定局を設置し、GPS受信データから計算した位置と固定局の位置の差から精度を上げる仕組みであるDifferential GPS(以下DGPS)や、静止衛星型衛星航法補強システム(Satellite−based Augmentation System)などを利用する。
【0060】
車上クロック22の時刻誤差を補正する方法として、4つのGPS衛星から受信したGPSデータを用いて時刻補正する方式が一般的に採用される。しかし、マルチパス等の伝搬遅延誤差が含まれるため、GPSデータによる時刻補正では十分な安全性が保証できない可能性がある。そこで、本発明では、受信したGPSデータより在線範囲を算出する際、車上装置20は正確なクロックを保持する地上装置30と通信し、その受信した正確なクロック情報222で車上クロック22の時刻誤差を補正する。
【0061】
なお、地上装置30は前記DGPSや図6のようにネットワーク70への接続機器が持つ時計を正確な時刻へ同期させる通信プロトコルであるNTP(Network Time Protocol)などで正確なクロックを保持する。
【0062】
時刻を補正しても時間経過で、再度、車上クロック22の時刻に誤差が生じてくる。そこで、本発明での在線範囲算出部23は該車上クロック22のメーカーの公称誤差を保持して、時刻補正した時刻とGPSデータ受信時刻の差で拡大した在線範囲を算出することも可能である。
【0063】
例えば、公称誤差が±1ppmの車上クロック22を用い、GPSデータを受信してから200ミリ秒後に時刻補正した場合、車上クロック22は200ミリ秒の間に最大500万分の1秒ずれる。電波は500万分の1秒間で約60メートル進むため、在線範囲算出部23は疑似距離を60メートル拡大したもので在線範囲を算出する。
【0064】
車上クロック22の時刻誤差を補正する方法として、従来から一般的に採用されているGPS衛星から受信したGPSデータを用いて時刻補正する方式を採用しても良い。GPS衛星を用いた場合、受信地点の座標値および補正時刻が算出される。そのマルチパス等の伝搬遅延誤差による時刻補正誤りを防ぐため、GPSデータより算出された受信地点の座標値と速度発電機など別の位置推定方式で求めた在線地点の座標値とを比較し、そのずれを元に時刻補正の信頼性を検証する。
【0065】
また、GPSデータに含まれる情報(軌道情報、GPSデータ送信時刻など)は誤っていない、かつGPS衛星が保持する時刻情報、および車上装置20のクロックが特定する受信時刻が正しい前提では、GPSデータより得られた在線範囲内に該列車が在線する。そのため、図7のように、複数のGPS衛星より同一時間帯に受信したGPSデータを用いて在線範囲を算出する場合、該GPSデータより算出された在線範囲が全て重複する箇所が必ず存在する。
【0066】
しかし、前記前提が成立しなくなった場合、在線範囲が一部重複しない箇所が発生する可能性がある。これは、車上クロック22が正常なクロックよりも早く動作し、疑似距離が受信距離より短くなることで発生する。
【0067】
そこで、前記GPS監視部26は、各GPSデータからの受信データ211より算出された在線範囲263を比較し、該GPSデータより算出された在線範囲が全て重複する箇所(例えば、図7の204c)が存在することを確認する。重複しない箇所が1つでも存在する場合、GPSデータの誤り、もしくは車上クロック22の異常と判断し、警報情報262として車上装置20ないし地上装置30へ出力する。本構成により、GPSの異常を即座に検知できる。
【0068】
同時に速度制御情報261を速度制御部25に出力し、列車2の減速(走行速度を図9の41aから図10の41bへ変更し、同じく走行パターンも44aから44bへ変更)、停止目標地点の変更(46aから46bへ200m手前に設け、走行可能距離も45aの1900mから45bの1700mとする)ないし緊急停止を実行する。
【0069】
また、GPS監視部26はGPS受信部21で受信した受信情報212(受信衛星数、受信感度など)を監視する。例えば、図9の47aのように、正常時に捕捉しているGPS衛星数は5個であるのに対し、異常時は図10の47bのように3個しか捕捉できていない場合である。この場合でも前述のように異常通知ないし運行制御が可能である。
さらに、前記車上装置20もしくは前記地上装置30はモニタ4で状態を把握できるので、その原因特定や手動での列車運行制御(減速、停止目標の変更など)が可能となる。
【産業上の利用可能性】
【0070】
以上の実施例では列車制御システムを対象として説明したが、同様な構成で航空機運行制御、自動車制御、エレベータ制御などの移動体制御システムにおいても、本発明を適用可能である。
【符号の説明】
【0071】
10a、10b GPS衛星
101 受信距離
102 擬似距離
2、5 列車
20 車上装置
21 GPS受信部
22 車上クロック部
23 在線範囲算出部
24 車上通信部
25 速度制御部
26 GPS監視部
27 マップ情報部
204a、204b、203c、504a 在線範囲
30 地上装置
31 地上通信部
32 停止目標算出部
33 在線範囲算出部
34 在線範囲予測部
35 地上クロック部
4 モニタ
6 線路
61 在線範囲
【特許請求の範囲】
【請求項1】
列車と列車の外部との間で情報を送受信し、該受信した情報を元に列車の運行を制御する列車制御システムにおいて、
位置情報と時刻情報からなる位置時刻情報を外部より受信する送受信部と、
位置時刻情報を受信した車上時刻情報を計測する時刻計測部と、
前記位置時刻情報を受信した車上時刻情報とで列車の在線範囲情報を算出する在線範囲算出部と、
列車の走行を制御する走行制御部とを有し、
前記在線範囲情報により列車の走行開始、速度ないし停止を制御する
ことを特徴とする列車制御システム。
【請求項2】
列車と列車の外部との間で情報を送受信し、該受信した情報を元に列車の運行を制御する列車制御システムにおいて、
位置情報と時刻情報からなる位置時刻情報を外部より受信する送受信部と、
位置時刻情報を受信した車上時刻情報を計測する時刻計測部と、
前記位置時刻情報を受信した車上時刻情報とで列車の在線範囲情報を算出する在線範囲算出部と、
列車の走行を制御する走行制御部と有する列車と、
前記在線範囲情報ないし前記位置時刻情報を列車の外部に送信し、前記在線範囲情報ないし前記位置時刻情報を受信する地上装置とを有し、
前記地上装置は、送受信する地上通信部と、受信した前記在線範囲情報ないし前記位置時刻情報から列車制御情報を算出する列車制御情報算出部から構成され、
前記列車制御情報を地上通信部から列車に送信し、該在線範囲情報ないし列車制御情報により列車の走行制御を行う
ことを特徴とする列車制御システム。
【請求項3】
請求項1または2記載の列車制御システムにおいて、在線範囲算出部は、走行している線路の2次元もしくは3次元の位置情報、該マップの位置精度情報のうち、少なくとも1つの情報を含むマップ情報を記録し、該マップ情報を元に在線範囲を算出することを特徴とする列車制御システム。
【請求項4】
請求項1または2記載の列車制御システムにおいて、在線範囲算出部は、列車在線範囲を算出する際、軌道回路、加速度センサ、ジャイロセンサ、速度発電機、トランスポンダ、バリス、無線LANの電波情報、超音波センサ、ドップラーレーダー、カメラ、赤外線センサ、車軸検知器(アクセルカウンター)のうち、少なくとも1つの装置を用いて取得した情報と、前記外部データとを併用して在線範囲を算出することを特徴とする列車制御システム。
【請求項5】
請求項1または2記載の列車制御システムにおいて、停止目標算出部は、停止目標を算出する際、先行列車もしくは自列車の停止目標が前回算出時点よりも進行方向に対して後方に下がった場合、前回算出時点の停止目標を算出する、もしくは先行列車が後退する可能性がある場合は後退する可能性のある距離を差し引いた地点を算出することを特徴とする列車制御システム。
【請求項6】
請求項2記載の列車制御システムにおいて、地上装置が在線範囲算出部を備え、該地上装置は前記車上装置から受け取った前記データを該在線範囲算出部へ入力して在線範囲を算出することを特徴とする列車制御システム。
【請求項7】
請求項2記載の列車制御システムにおいて、地上装置は、車上装置を経由せずに地上装置へ入力される情報を使用して在線範囲を算出するものであって、軌道回路、超音波センサ、ドップラーレーダー、カメラ、赤外線センサ、車軸検知器(アクセルカウンター)のうち、少なくとも1つの地上側に設置された装置を用いて取得した情報を使用することを特徴とする列車制御システム。
【請求項8】
請求項1または2記載の列車制御システムにおいて、車上装置もしくは地上装置は、各装置の処理状況を表示するモニタ、もしくは音声にて処理状況を知らせる手段を備えることを特徴とする列車制御システム。
【請求項9】
請求項2記載の列車制御システムにおいて、地上装置は停止目標の代わりに各地点における該列車の制限速度を車上装置へ送信することを特徴とする列車制御システム。
【請求項10】
請求項1または2記載の列車制御システムにおいて、車上装置は在線範囲算出部および停止目標算出部を備え、該車上装置は、該在線範囲算出部より自列車の在線範囲を算出し、同一走行路を走行する他列車と在線範囲を送受信し、該停止目標算出部は該在線範囲を元に停止目標を算出し、自列車の走行速度を制御することを特徴とする列車制御システム。
【請求項11】
請求項1または2記載の列車制御システムにおいて、車上装置は、1編成の列車に対し複数台の受信装置を備え、前記在線範囲算出部は前記受信装置の設置位置情報を事前に測定して記録しておき、複数の受信装置が受信したデータ、および受信装置の設置位置情報を元に在線範囲を算出することを特徴とする列車制御システム。
【請求項12】
請求項1または2記載の列車制御システムにおいて、車上装置もしくは地上装置は在線範囲予測部を備え、在線範囲予測部は未来のある時点における各列車の在線範囲を予測し、同一時点において同一走行路を走行する先行列車の在線範囲を考慮して該列車の予測停止目標を算出することを特徴とする列車制御システム。
【請求項13】
請求項1または2記載の列車制御システムにおいて、車上装置もしくは地上装置は、外部から受信する情報を監視する外部情報監視部を備え、前記地上装置はクロックを備え、かつ該地上装置の設置位置を記録しておき、前記外部情報監視装置は前記外部受信装置が受信した外部データに含まれる情報のうち、位置情報、外部データ送信時刻の少なくとも1つの情報の誤りを検知する手段を備え、外部データの誤りを検知した場合には該車上装置へ警報を出力することを特徴とする列車制御システム。
【請求項14】
請求項1または2記載の列車制御システムにおいて、時刻計測部での時刻誤差を補正する方法として、外部データより算出された在線地点の座標値および補正時刻と、軌道回路、加速度センサ、ジャイロセンサ、速度発電機、トランスポンダ、バリス、無線LANの電波情報、超音波センサ、ドップラーレーダー、カメラ、赤外線センサ、車軸検知器(アクセルカウンター)のうち、少なくとも1つの装置を用いて取得した情報より算出した在線地点とを比較し、そのずれを元に時刻補正の信頼性を検証することを特徴とする列車制御システム。
【請求項15】
請求項13記載の列車制御システムにおいて、外部情報監視装置は外部データより算出された在線範囲を比較し、外部データより算出された在線範囲が全て重複する箇所が存在することを確認し、全て重複する箇所が存在しない場合、外部データに含まれる情報のうち、位置情報、データ送信時刻の少なくとも1つの情報の誤り、もしくは時刻計測部の異常と判断し、車上装置へ警報を出力することを特徴とする列車制御システム。
【請求項1】
列車と列車の外部との間で情報を送受信し、該受信した情報を元に列車の運行を制御する列車制御システムにおいて、
位置情報と時刻情報からなる位置時刻情報を外部より受信する送受信部と、
位置時刻情報を受信した車上時刻情報を計測する時刻計測部と、
前記位置時刻情報を受信した車上時刻情報とで列車の在線範囲情報を算出する在線範囲算出部と、
列車の走行を制御する走行制御部とを有し、
前記在線範囲情報により列車の走行開始、速度ないし停止を制御する
ことを特徴とする列車制御システム。
【請求項2】
列車と列車の外部との間で情報を送受信し、該受信した情報を元に列車の運行を制御する列車制御システムにおいて、
位置情報と時刻情報からなる位置時刻情報を外部より受信する送受信部と、
位置時刻情報を受信した車上時刻情報を計測する時刻計測部と、
前記位置時刻情報を受信した車上時刻情報とで列車の在線範囲情報を算出する在線範囲算出部と、
列車の走行を制御する走行制御部と有する列車と、
前記在線範囲情報ないし前記位置時刻情報を列車の外部に送信し、前記在線範囲情報ないし前記位置時刻情報を受信する地上装置とを有し、
前記地上装置は、送受信する地上通信部と、受信した前記在線範囲情報ないし前記位置時刻情報から列車制御情報を算出する列車制御情報算出部から構成され、
前記列車制御情報を地上通信部から列車に送信し、該在線範囲情報ないし列車制御情報により列車の走行制御を行う
ことを特徴とする列車制御システム。
【請求項3】
請求項1または2記載の列車制御システムにおいて、在線範囲算出部は、走行している線路の2次元もしくは3次元の位置情報、該マップの位置精度情報のうち、少なくとも1つの情報を含むマップ情報を記録し、該マップ情報を元に在線範囲を算出することを特徴とする列車制御システム。
【請求項4】
請求項1または2記載の列車制御システムにおいて、在線範囲算出部は、列車在線範囲を算出する際、軌道回路、加速度センサ、ジャイロセンサ、速度発電機、トランスポンダ、バリス、無線LANの電波情報、超音波センサ、ドップラーレーダー、カメラ、赤外線センサ、車軸検知器(アクセルカウンター)のうち、少なくとも1つの装置を用いて取得した情報と、前記外部データとを併用して在線範囲を算出することを特徴とする列車制御システム。
【請求項5】
請求項1または2記載の列車制御システムにおいて、停止目標算出部は、停止目標を算出する際、先行列車もしくは自列車の停止目標が前回算出時点よりも進行方向に対して後方に下がった場合、前回算出時点の停止目標を算出する、もしくは先行列車が後退する可能性がある場合は後退する可能性のある距離を差し引いた地点を算出することを特徴とする列車制御システム。
【請求項6】
請求項2記載の列車制御システムにおいて、地上装置が在線範囲算出部を備え、該地上装置は前記車上装置から受け取った前記データを該在線範囲算出部へ入力して在線範囲を算出することを特徴とする列車制御システム。
【請求項7】
請求項2記載の列車制御システムにおいて、地上装置は、車上装置を経由せずに地上装置へ入力される情報を使用して在線範囲を算出するものであって、軌道回路、超音波センサ、ドップラーレーダー、カメラ、赤外線センサ、車軸検知器(アクセルカウンター)のうち、少なくとも1つの地上側に設置された装置を用いて取得した情報を使用することを特徴とする列車制御システム。
【請求項8】
請求項1または2記載の列車制御システムにおいて、車上装置もしくは地上装置は、各装置の処理状況を表示するモニタ、もしくは音声にて処理状況を知らせる手段を備えることを特徴とする列車制御システム。
【請求項9】
請求項2記載の列車制御システムにおいて、地上装置は停止目標の代わりに各地点における該列車の制限速度を車上装置へ送信することを特徴とする列車制御システム。
【請求項10】
請求項1または2記載の列車制御システムにおいて、車上装置は在線範囲算出部および停止目標算出部を備え、該車上装置は、該在線範囲算出部より自列車の在線範囲を算出し、同一走行路を走行する他列車と在線範囲を送受信し、該停止目標算出部は該在線範囲を元に停止目標を算出し、自列車の走行速度を制御することを特徴とする列車制御システム。
【請求項11】
請求項1または2記載の列車制御システムにおいて、車上装置は、1編成の列車に対し複数台の受信装置を備え、前記在線範囲算出部は前記受信装置の設置位置情報を事前に測定して記録しておき、複数の受信装置が受信したデータ、および受信装置の設置位置情報を元に在線範囲を算出することを特徴とする列車制御システム。
【請求項12】
請求項1または2記載の列車制御システムにおいて、車上装置もしくは地上装置は在線範囲予測部を備え、在線範囲予測部は未来のある時点における各列車の在線範囲を予測し、同一時点において同一走行路を走行する先行列車の在線範囲を考慮して該列車の予測停止目標を算出することを特徴とする列車制御システム。
【請求項13】
請求項1または2記載の列車制御システムにおいて、車上装置もしくは地上装置は、外部から受信する情報を監視する外部情報監視部を備え、前記地上装置はクロックを備え、かつ該地上装置の設置位置を記録しておき、前記外部情報監視装置は前記外部受信装置が受信した外部データに含まれる情報のうち、位置情報、外部データ送信時刻の少なくとも1つの情報の誤りを検知する手段を備え、外部データの誤りを検知した場合には該車上装置へ警報を出力することを特徴とする列車制御システム。
【請求項14】
請求項1または2記載の列車制御システムにおいて、時刻計測部での時刻誤差を補正する方法として、外部データより算出された在線地点の座標値および補正時刻と、軌道回路、加速度センサ、ジャイロセンサ、速度発電機、トランスポンダ、バリス、無線LANの電波情報、超音波センサ、ドップラーレーダー、カメラ、赤外線センサ、車軸検知器(アクセルカウンター)のうち、少なくとも1つの装置を用いて取得した情報より算出した在線地点とを比較し、そのずれを元に時刻補正の信頼性を検証することを特徴とする列車制御システム。
【請求項15】
請求項13記載の列車制御システムにおいて、外部情報監視装置は外部データより算出された在線範囲を比較し、外部データより算出された在線範囲が全て重複する箇所が存在することを確認し、全て重複する箇所が存在しない場合、外部データに含まれる情報のうち、位置情報、データ送信時刻の少なくとも1つの情報の誤り、もしくは時刻計測部の異常と判断し、車上装置へ警報を出力することを特徴とする列車制御システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】

【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2013−23054(P2013−23054A)
【公開日】平成25年2月4日(2013.2.4)
【国際特許分類】
【出願番号】特願2011−158975(P2011−158975)
【出願日】平成23年7月20日(2011.7.20)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
【公開日】平成25年2月4日(2013.2.4)
【国際特許分類】
【出願日】平成23年7月20日(2011.7.20)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
[ Back to top ]