
列車制御システム

【課題】列車の間隔情報を取得するとともに、地上装置以外の装置からも列車の間隔情報を得ることができ、列車の安全な走行制御を行うことのできる列車制御システムを提供する。
【解決手段】所定の軌道を走行する列車2に搭載された車上装置と、車上装置の情報を送受信する車上無線機と、地上の所定位置に設けられた沿線無線機5と、沿線無線機5に送受信可能に接続された地上装置6と、を備え、地上装置6は、沿線無線機5と車上無線機との通信による測距結果に基づいて、列車2および後続列車2の位置情報を取得して車上装置に送信するとともに、車上装置は、地上装置6から送られる自列車2の位置情報および後続列車2の位置情報に基づいて、後続列車2の停止限界位置を算出し、後続列車2に送信する。
【解決手段】所定の軌道を走行する列車2に搭載された車上装置と、車上装置の情報を送受信する車上無線機と、地上の所定位置に設けられた沿線無線機5と、沿線無線機5に送受信可能に接続された地上装置6と、を備え、地上装置6は、沿線無線機5と車上無線機との通信による測距結果に基づいて、列車2および後続列車2の位置情報を取得して車上装置に送信するとともに、車上装置は、地上装置6から送られる自列車2の位置情報および後続列車2の位置情報に基づいて、後続列車2の停止限界位置を算出し、後続列車2に送信する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は列車制御システムに係り、特に、列車の間隔情報を取得するとともに、地上装置以外の装置からも列車の間隔情報を得ることができ、列車の安全な走行制御を行うことを可能とした列車制御システムに関する。
【背景技術】
【0002】
従来から、いわゆる無線測距方式を利用した列車制御システムは、列車に車上無線機を搭載し、その列車の走行する軌道の沿線に沿って所定の間隔をもって設置された複数の沿線無線機との間で無線ネットワークを形成し、車上無線機の車上アンテナと沿線無線機の沿線アンテナとの無線伝搬遅延(時間)を計測して列車位置を検知し、その検知された列車位置に基づいて列車制御を行うようになっている。
【0003】
そして、このような無線測距方式を利用した列車制御システムとしては、従来から、例えば、所定の軌道を走行する列車に搭載された車上無線機および地上の所定位置に設けられた地上無線機間の無線の伝播時間に基づいてその所定の軌道における列車位置を検知する無線列車位置検知手段と、列車の車軸に接続された速度発電機の出力信号に基づいて所定の軌道における列車の走行距離を算出する走行距離算出手段と、無線列車位置検知手段で検知された列車位置を所定の仮基準位置に設定する仮基準位置設定手段と、その仮基準位置設定手段で設定された仮基準位置から走行距離算出手段で算出された走行距離に基づいて所定の軌道における列車位置を検知する列車位置検知算出手段とを備えた技術が開示されている(例えば、特許文献1を参照。)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2007−331629号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、前記従来の技術においては、列車の位置を検知して地上装置から車上装置に列車位置情報を送るものであるが、例えば、沿線無線機との無線通信状態が良好でない場合や、軌道の沿線に通信機器を設置できない場合においては、列車に十分な情報を与えることができず地上装置による列車位置情報のみでは、十分な列車の走行制御を行うことができなくなるおそれがあり、その他の通信システムが望まれていた。
【0006】
本発明は前記した点に鑑みてなされたものであり、列車の間隔情報を取得するとともに、地上装置以外の装置からも列車の間隔情報を得ることができ、列車の安全な走行制御を行うことのできる列車制御システムを提供することを目的とするものである。
【課題を解決するための手段】
【0007】
本発明は前記目的を達成するために、請求項1の発明に係る列車制御システムは、所定の軌道を走行する列車に搭載された車上装置と、
前記車上装置の情報を送受信する車上無線機と、
地上の所定位置に設けられた沿線無線機と、
前記沿線無線機に送受信可能に接続された地上装置と、
を備え、
前記地上装置は、沿線無線機と車上無線機との通信による測距結果に基づいて、前記列車および後続列車の位置情報を取得して前記車上装置に送信し、
前記車上装置は、前記地上装置から送られる自列車の位置情報および後続列車の位置情報に基づいて、後続列車の停止限界位置を算出し、後続列車に送信することを特徴とする。
【0008】
請求項2に係る発明は、請求項1において、前記後続列車の車上装置は、先行列車から送られる列車位置情報および停止限界位置情報に基づいて速度パターンを生成し、この速度パターンに基づいて列車の走行制御を行うことを特徴とする。
【0009】
請求項3に係る発明は、所定の軌道を走行する列車に搭載された車上装置と、
前記車上装置の情報を送受信する車上無線機と、
地上の所定位置に設けられた沿線無線機と、
前記沿線無線機に送受信可能に接続された地上装置と、
を備え、
前記地上装置は、沿線無線機と車上無線機との通信による測距結果に基づいて、前記列車および後続列車の位置情報を取得するとともに、自列車の位置情報および後続列車の位置情報に基づいて、後続列車の停止限界位置を算出して上位システムに送信し、
前記上位システムは、衛星システムにより前記列車に送信することを特徴とする。
【0010】
請求項4に係る発明は、請求項3において、前記後続列車の車上装置は、前記衛星システムから送られる列車位置情報および停止限界位置情報に基づいて速度パターンを生成し、この速度パターンに基づいて列車の走行制御を行うことを特徴とする。
【発明の効果】
【0011】
請求項1に係る発明によれば、地上装置により、沿線無線機と車上無線機との通信時間に基づいて、列車および後続列車の位置情報を取得して車上装置に送信するとともに、車上装置により、地上装置から送られる自列車の位置情報および後続列車の位置情報に基づいて、後続列車の停止限界位置を算出し、後続列車に送信するようにしているので、各列車の間隔を適正に保持することができ、列車の安全な走行制御を行うことができる。
【0012】
請求項2に係る発明によれば、後続列車の車上装置により、先行列車から送られる列車位置情報および停止限界位置情報に基づいて速度パターンを生成し、この速度パターンに基づいて列車の走行制御を行うようにしているので、各列車の間隔を適正に保持することができ、列車の安全な走行制御を行うことができる。
【0013】
請求項3に係る発明によれば、地上装置により、沿線無線機と車上無線機との通信時間に基づいて、列車および後続列車の位置情報を取得するとともに、自列車の位置情報および後続列車の位置情報に基づいて、後続列車の停止限界位置を算出して上位システムに送信するとともに、上位システムは、衛星システムにより列車に送信するようにしているので、各列車の間隔を適正に保持することができ、列車の安全な走行制御を行うことができる。
【0014】
請求項4に係る発明によれば、後続列車の車上装置により、衛星システムから送られる列車位置情報および停止限界位置情報に基づいて速度パターンを生成し、この速度パターンに基づいて列車の走行制御を行うようにしているので、各列車の間隔を適正に保持することができ、列車の安全な走行制御を行うことができる。
【図面の簡単な説明】
【0015】
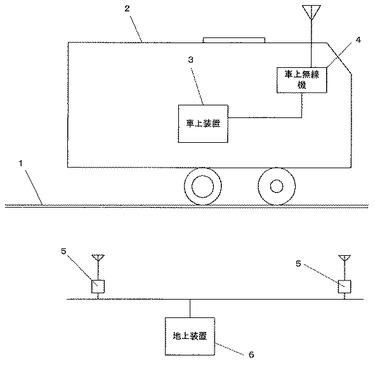
【図1】本発明に係る列車制御システムの実施形態における列車部分を示す概略構成図である。
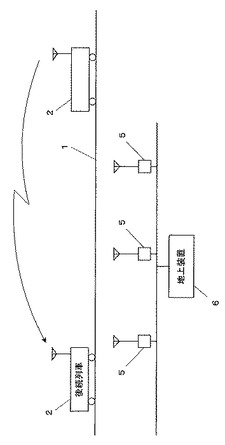
【図2】本発明に係る列車制御システムの実施形態における路線の一例を示す説明図である。
【発明を実施するための形態】
【0016】
以下、本発明の実施形態について図面を参照して説明する。
【0017】
図1および図2は、本発明に係る列車制御システムの実施形態を示す概略構成図であり、本実施形態においては、所定の軌道1上を走行する列車2には、車上装置3が搭載されている。この車上装置3は、CPUを中心に構成された演算処理部(図示せず)を有していて、列車2の速度制御や制動制御などの各種制御を行うように構成されている。
【0018】
また、列車2には、車上装置3に接続された車上無線機4が搭載されており、列車2の軌道1上には、車上無線機4と情報の送受信を行うための複数の沿線無線機5が設置されている。また、これら沿線無線機5には、地上装置6が接続されている。
【0019】
そして、各地上装置6は、沿線無線機5と車上無線機4との通信を行った際の通信時間を計測し、その時間差による測距結果、沿線無線機5と列車2との距離を演算し、列車2が現在どの位置に存在しているかを検知するように構成されている。そして、地上装置6は、沿線無線機5および車上無線機4を介して、車上装置3に、現在の列車2の位置情報および後続の列車2の位置情報を送信するように構成されている。
【0020】
そして、車上装置3は、地上装置6から送られる自列車2の位置情報および後続列車2の位置情報に基づいて、後続列車2の停止限界位置を算出し、後続列車2に送信するように構成されている。ここで、先行列車2の車上装置3から後続列車2への送信経路としては、例えば、先行列車2の車上無線機4から後続列車2の車上無線機4に直接送信するようにしてもよいし、先行列車2の車上無線機4から、一度沿線無線機5を経由して後続列車2の車上無線機4に送信するようにしてもよい。
【0021】
後続列車2は、車上装置3により、列車位置情報および停止限界位置情報に基づいて、自列車2のブレーキ性能に従って速度パターンを生成し、走行速度が速度パターンを超過した時に速度パターン以下の速度になるようにブレーキ装置を制御して減速するように構成されている。
【0022】
また、本実施形態においては、地上装置6からの列車位置情報に基づいて、後続の列車2に対して、停止限界位置情報を送信するようにしているが、例えば、地上装置6により列車位置情報を取得するとともに、地上装置6により、各列車2の停止限界位置情報を求め、地上装置6からの列車位置情報および停止限界位置情報を上位システムに送信し、上位システムから、例えば、衛星通信システムを用いて各列車2に送信するようにしてもよい。
【0023】
次に、本実施形態の制御動作について説明する。
【0024】
まず、沿線無線機5と車上無線機4との間で通信を行い、この通信時間を計測することにより、各地上装置6により、沿線無線機5と列車2との距離を演算し、列車2の現在の位置を検知する。
【0025】
そして、地上装置6は、列車位置情報を沿線無線機5および車上無線機4を介して車上装置3に送信する。また、車上装置3は、地上装置6から送られる自列車2の位置情報および後続列車2の位置情報に基づいて、後続列車2の停止限界位置を算出し、後続列車2に送信する。
【0026】
そして、後続列車2は、車上装置3により、列車位置情報および停止限界位置情報に基づいて、自列車2のブレーキ性能に従って速度パターンを生成し、この速度パターンに従って列車2の走行制御を行うものである。
【0027】
以上述べたように、本実施形態においては、地上装置6から沿線無線機5および車上無線機4を介して車上装置3に、列車位置情報を送信するとともに、車上装置3により、列車位置情報に基づいて後続列車2の停止限界位置情報を求めて後続列車2に送信し、後続列車2は、自列車2のブレーキ性能に従って速度パターンを生成し、この速度パターンに基づいて、列車2の走行制御を行うようにしているので、各列車2の間隔を適正に保持することができ、列車2の安全な走行制御を行うことができる。
【0028】
なお、本発明は前記実施形態に限定されるものではなく、本発明の趣旨に基づいて種々の変形が可能である。
【符号の説明】
【0029】
1 軌道
2 列車
3 車上装置
4 車上無線機
5 沿線無線機
6 地上装置
【技術分野】
【0001】
本発明は列車制御システムに係り、特に、列車の間隔情報を取得するとともに、地上装置以外の装置からも列車の間隔情報を得ることができ、列車の安全な走行制御を行うことを可能とした列車制御システムに関する。
【背景技術】
【0002】
従来から、いわゆる無線測距方式を利用した列車制御システムは、列車に車上無線機を搭載し、その列車の走行する軌道の沿線に沿って所定の間隔をもって設置された複数の沿線無線機との間で無線ネットワークを形成し、車上無線機の車上アンテナと沿線無線機の沿線アンテナとの無線伝搬遅延(時間)を計測して列車位置を検知し、その検知された列車位置に基づいて列車制御を行うようになっている。
【0003】
そして、このような無線測距方式を利用した列車制御システムとしては、従来から、例えば、所定の軌道を走行する列車に搭載された車上無線機および地上の所定位置に設けられた地上無線機間の無線の伝播時間に基づいてその所定の軌道における列車位置を検知する無線列車位置検知手段と、列車の車軸に接続された速度発電機の出力信号に基づいて所定の軌道における列車の走行距離を算出する走行距離算出手段と、無線列車位置検知手段で検知された列車位置を所定の仮基準位置に設定する仮基準位置設定手段と、その仮基準位置設定手段で設定された仮基準位置から走行距離算出手段で算出された走行距離に基づいて所定の軌道における列車位置を検知する列車位置検知算出手段とを備えた技術が開示されている(例えば、特許文献1を参照。)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2007−331629号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、前記従来の技術においては、列車の位置を検知して地上装置から車上装置に列車位置情報を送るものであるが、例えば、沿線無線機との無線通信状態が良好でない場合や、軌道の沿線に通信機器を設置できない場合においては、列車に十分な情報を与えることができず地上装置による列車位置情報のみでは、十分な列車の走行制御を行うことができなくなるおそれがあり、その他の通信システムが望まれていた。
【0006】
本発明は前記した点に鑑みてなされたものであり、列車の間隔情報を取得するとともに、地上装置以外の装置からも列車の間隔情報を得ることができ、列車の安全な走行制御を行うことのできる列車制御システムを提供することを目的とするものである。
【課題を解決するための手段】
【0007】
本発明は前記目的を達成するために、請求項1の発明に係る列車制御システムは、所定の軌道を走行する列車に搭載された車上装置と、
前記車上装置の情報を送受信する車上無線機と、
地上の所定位置に設けられた沿線無線機と、
前記沿線無線機に送受信可能に接続された地上装置と、
を備え、
前記地上装置は、沿線無線機と車上無線機との通信による測距結果に基づいて、前記列車および後続列車の位置情報を取得して前記車上装置に送信し、
前記車上装置は、前記地上装置から送られる自列車の位置情報および後続列車の位置情報に基づいて、後続列車の停止限界位置を算出し、後続列車に送信することを特徴とする。
【0008】
請求項2に係る発明は、請求項1において、前記後続列車の車上装置は、先行列車から送られる列車位置情報および停止限界位置情報に基づいて速度パターンを生成し、この速度パターンに基づいて列車の走行制御を行うことを特徴とする。
【0009】
請求項3に係る発明は、所定の軌道を走行する列車に搭載された車上装置と、
前記車上装置の情報を送受信する車上無線機と、
地上の所定位置に設けられた沿線無線機と、
前記沿線無線機に送受信可能に接続された地上装置と、
を備え、
前記地上装置は、沿線無線機と車上無線機との通信による測距結果に基づいて、前記列車および後続列車の位置情報を取得するとともに、自列車の位置情報および後続列車の位置情報に基づいて、後続列車の停止限界位置を算出して上位システムに送信し、
前記上位システムは、衛星システムにより前記列車に送信することを特徴とする。
【0010】
請求項4に係る発明は、請求項3において、前記後続列車の車上装置は、前記衛星システムから送られる列車位置情報および停止限界位置情報に基づいて速度パターンを生成し、この速度パターンに基づいて列車の走行制御を行うことを特徴とする。
【発明の効果】
【0011】
請求項1に係る発明によれば、地上装置により、沿線無線機と車上無線機との通信時間に基づいて、列車および後続列車の位置情報を取得して車上装置に送信するとともに、車上装置により、地上装置から送られる自列車の位置情報および後続列車の位置情報に基づいて、後続列車の停止限界位置を算出し、後続列車に送信するようにしているので、各列車の間隔を適正に保持することができ、列車の安全な走行制御を行うことができる。
【0012】
請求項2に係る発明によれば、後続列車の車上装置により、先行列車から送られる列車位置情報および停止限界位置情報に基づいて速度パターンを生成し、この速度パターンに基づいて列車の走行制御を行うようにしているので、各列車の間隔を適正に保持することができ、列車の安全な走行制御を行うことができる。
【0013】
請求項3に係る発明によれば、地上装置により、沿線無線機と車上無線機との通信時間に基づいて、列車および後続列車の位置情報を取得するとともに、自列車の位置情報および後続列車の位置情報に基づいて、後続列車の停止限界位置を算出して上位システムに送信するとともに、上位システムは、衛星システムにより列車に送信するようにしているので、各列車の間隔を適正に保持することができ、列車の安全な走行制御を行うことができる。
【0014】
請求項4に係る発明によれば、後続列車の車上装置により、衛星システムから送られる列車位置情報および停止限界位置情報に基づいて速度パターンを生成し、この速度パターンに基づいて列車の走行制御を行うようにしているので、各列車の間隔を適正に保持することができ、列車の安全な走行制御を行うことができる。
【図面の簡単な説明】
【0015】
【図1】本発明に係る列車制御システムの実施形態における列車部分を示す概略構成図である。
【図2】本発明に係る列車制御システムの実施形態における路線の一例を示す説明図である。
【発明を実施するための形態】
【0016】
以下、本発明の実施形態について図面を参照して説明する。
【0017】
図1および図2は、本発明に係る列車制御システムの実施形態を示す概略構成図であり、本実施形態においては、所定の軌道1上を走行する列車2には、車上装置3が搭載されている。この車上装置3は、CPUを中心に構成された演算処理部(図示せず)を有していて、列車2の速度制御や制動制御などの各種制御を行うように構成されている。
【0018】
また、列車2には、車上装置3に接続された車上無線機4が搭載されており、列車2の軌道1上には、車上無線機4と情報の送受信を行うための複数の沿線無線機5が設置されている。また、これら沿線無線機5には、地上装置6が接続されている。
【0019】
そして、各地上装置6は、沿線無線機5と車上無線機4との通信を行った際の通信時間を計測し、その時間差による測距結果、沿線無線機5と列車2との距離を演算し、列車2が現在どの位置に存在しているかを検知するように構成されている。そして、地上装置6は、沿線無線機5および車上無線機4を介して、車上装置3に、現在の列車2の位置情報および後続の列車2の位置情報を送信するように構成されている。
【0020】
そして、車上装置3は、地上装置6から送られる自列車2の位置情報および後続列車2の位置情報に基づいて、後続列車2の停止限界位置を算出し、後続列車2に送信するように構成されている。ここで、先行列車2の車上装置3から後続列車2への送信経路としては、例えば、先行列車2の車上無線機4から後続列車2の車上無線機4に直接送信するようにしてもよいし、先行列車2の車上無線機4から、一度沿線無線機5を経由して後続列車2の車上無線機4に送信するようにしてもよい。
【0021】
後続列車2は、車上装置3により、列車位置情報および停止限界位置情報に基づいて、自列車2のブレーキ性能に従って速度パターンを生成し、走行速度が速度パターンを超過した時に速度パターン以下の速度になるようにブレーキ装置を制御して減速するように構成されている。
【0022】
また、本実施形態においては、地上装置6からの列車位置情報に基づいて、後続の列車2に対して、停止限界位置情報を送信するようにしているが、例えば、地上装置6により列車位置情報を取得するとともに、地上装置6により、各列車2の停止限界位置情報を求め、地上装置6からの列車位置情報および停止限界位置情報を上位システムに送信し、上位システムから、例えば、衛星通信システムを用いて各列車2に送信するようにしてもよい。
【0023】
次に、本実施形態の制御動作について説明する。
【0024】
まず、沿線無線機5と車上無線機4との間で通信を行い、この通信時間を計測することにより、各地上装置6により、沿線無線機5と列車2との距離を演算し、列車2の現在の位置を検知する。
【0025】
そして、地上装置6は、列車位置情報を沿線無線機5および車上無線機4を介して車上装置3に送信する。また、車上装置3は、地上装置6から送られる自列車2の位置情報および後続列車2の位置情報に基づいて、後続列車2の停止限界位置を算出し、後続列車2に送信する。
【0026】
そして、後続列車2は、車上装置3により、列車位置情報および停止限界位置情報に基づいて、自列車2のブレーキ性能に従って速度パターンを生成し、この速度パターンに従って列車2の走行制御を行うものである。
【0027】
以上述べたように、本実施形態においては、地上装置6から沿線無線機5および車上無線機4を介して車上装置3に、列車位置情報を送信するとともに、車上装置3により、列車位置情報に基づいて後続列車2の停止限界位置情報を求めて後続列車2に送信し、後続列車2は、自列車2のブレーキ性能に従って速度パターンを生成し、この速度パターンに基づいて、列車2の走行制御を行うようにしているので、各列車2の間隔を適正に保持することができ、列車2の安全な走行制御を行うことができる。
【0028】
なお、本発明は前記実施形態に限定されるものではなく、本発明の趣旨に基づいて種々の変形が可能である。
【符号の説明】
【0029】
1 軌道
2 列車
3 車上装置
4 車上無線機
5 沿線無線機
6 地上装置
【特許請求の範囲】
【請求項1】
所定の軌道を走行する列車に搭載された車上装置と、
前記車上装置の情報を送受信する車上無線機と、
地上の所定位置に設けられた沿線無線機と、
前記沿線無線機に送受信可能に接続された地上装置と、
を備え、
前記地上装置は、沿線無線機と車上無線機との通信による測距結果に基づいて前記列車および後続列車の位置情報を取得して前記車上装置に送信し、
前記車上装置は、前記地上装置から送られる自列車の位置情報および後続列車の位置情報に基づいて、後続列車の停止限界位置を算出し、後続列車に送信することを特徴とする列車制御システム。
【請求項2】
前記後続列車の車上装置は、先行列車から送られる列車位置情報および停止限界位置情報に基づいて速度パターンを生成し、この速度パターンに基づいて列車の走行制御を行うことを特徴とする請求項1に記載の列車制御システム。
【請求項3】
所定の軌道を走行する列車に搭載された車上装置と、
前記車上装置の情報を送受信する車上無線機と、
地上の所定位置に設けられた沿線無線機と、
前記沿線無線機に送受信可能に接続された地上装置と、
を備え、
前記地上装置は、沿線無線機と車上無線機との通信による測距結果に基づいて、前記列車および後続列車の位置情報を取得するとともに、自列車の位置情報および後続列車の位置情報に基づいて、後続列車の停止限界位置を算出して上位システムに送信し、
前記上位システムは、衛星システムにより前記列車に送信することを特徴とする列車制御システム。
【請求項4】
前記後続列車の車上装置は、前記衛星システムから送られる列車位置情報および停止限界位置情報に基づいて速度パターンを生成し、この速度パターンに基づいて列車の走行制御を行うことを特徴とする請求項3に記載の列車制御システム。
【請求項1】
所定の軌道を走行する列車に搭載された車上装置と、
前記車上装置の情報を送受信する車上無線機と、
地上の所定位置に設けられた沿線無線機と、
前記沿線無線機に送受信可能に接続された地上装置と、
を備え、
前記地上装置は、沿線無線機と車上無線機との通信による測距結果に基づいて前記列車および後続列車の位置情報を取得して前記車上装置に送信し、
前記車上装置は、前記地上装置から送られる自列車の位置情報および後続列車の位置情報に基づいて、後続列車の停止限界位置を算出し、後続列車に送信することを特徴とする列車制御システム。
【請求項2】
前記後続列車の車上装置は、先行列車から送られる列車位置情報および停止限界位置情報に基づいて速度パターンを生成し、この速度パターンに基づいて列車の走行制御を行うことを特徴とする請求項1に記載の列車制御システム。
【請求項3】
所定の軌道を走行する列車に搭載された車上装置と、
前記車上装置の情報を送受信する車上無線機と、
地上の所定位置に設けられた沿線無線機と、
前記沿線無線機に送受信可能に接続された地上装置と、
を備え、
前記地上装置は、沿線無線機と車上無線機との通信による測距結果に基づいて、前記列車および後続列車の位置情報を取得するとともに、自列車の位置情報および後続列車の位置情報に基づいて、後続列車の停止限界位置を算出して上位システムに送信し、
前記上位システムは、衛星システムにより前記列車に送信することを特徴とする列車制御システム。
【請求項4】
前記後続列車の車上装置は、前記衛星システムから送られる列車位置情報および停止限界位置情報に基づいて速度パターンを生成し、この速度パターンに基づいて列車の走行制御を行うことを特徴とする請求項3に記載の列車制御システム。
【図1】


【図2】
【図2】
【公開番号】特開2013−75648(P2013−75648A)
【公開日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願番号】特願2011−218255(P2011−218255)
【出願日】平成23年9月30日(2011.9.30)
【出願人】(000004651)日本信号株式会社 (720)
【Fターム(参考)】
【公開日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願日】平成23年9月30日(2011.9.30)
【出願人】(000004651)日本信号株式会社 (720)
【Fターム(参考)】
[ Back to top ]