
列車制御システム

【課題】安全性を維持しつつ列車間隔を狭めて列車の走行制御を行うことが可能な列車制御システムを提供する。
【解決手段】線路R上を移動する列車に設けられ無線通信可能な車上無線機VRS1を備えた車上装置1と、線路Rに沿って配置され車上無線機VRS1との間で予め割当てられたタイムスロットのみ通信可能に時間同期された時分割多重アクセス方式による無線通信が可能な固定無線機(WRS1〜7、SRS1)と、車上無線機VRS1と固定無線機との間の無線通信によって得られた列車イの位置情報に基づいて、当該列車イから前方列車ロの手前の停止点までの距離を算出する地上装置2と、を備える構成とし、車上装置1は、地上装置2から伝送された停止点までの距離に基づき自列車イから停止点までの停止パターンを生成し、自列車イが停止パターン以下の速度で走行するように走行制御を行う。
【解決手段】線路R上を移動する列車に設けられ無線通信可能な車上無線機VRS1を備えた車上装置1と、線路Rに沿って配置され車上無線機VRS1との間で予め割当てられたタイムスロットのみ通信可能に時間同期された時分割多重アクセス方式による無線通信が可能な固定無線機(WRS1〜7、SRS1)と、車上無線機VRS1と固定無線機との間の無線通信によって得られた列車イの位置情報に基づいて、当該列車イから前方列車ロの手前の停止点までの距離を算出する地上装置2と、を備える構成とし、車上装置1は、地上装置2から伝送された停止点までの距離に基づき自列車イから停止点までの停止パターンを生成し、自列車イが停止パターン以下の速度で走行するように走行制御を行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、列車の走行制御を行う列車制御システムに関し、特に、列車間隔を狭めて列車を走行させることが可能な列車制御システムに関する。
【背景技術】
【0002】
従来、列車の走行制御を行う列車制御システムが知られている。この種の列車制御システムとしては、例えば、特開2002−67957号公報に記載されているものが知られている。この列車制御システムは、例えば、列車の走行路(軌道)を、例えば、数百メートル間隔で区画した閉塞区間を設け、各閉塞区間単位で列車の走行制御を行うように構成されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2002−67957号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の列車制御システムは、閉塞区間単位での列車の走行制御であり、通常、1閉塞区間は数百メートルに設定されているため、自列車と前方列車間の距離(列車間隔)を、1閉そく区間より縮めることができず、列車間隔が長くなっていた。
【0005】
本発明は上記課題に着目してなされたもので、列車制御システムにおいて、列車間隔を狭めて、列車の走行制御を行うことが可能な列車制御システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本発明の一側面による列車制御システムは、鉄道線路上を移動する列車に設けられ無線通信可能な車上無線機を備えた車上装置と、前記鉄道線路に沿って配置され、前記車上無線機との間で、予め割当てられたタイムスロットのみ通信可能に時間同期された時分割多重アクセス方式による無線通信が可能な固定無線機と、前記車上無線機と前記固定無線機との間の前記無線通信によって得られた列車の位置情報に基づいて、当該列車から前方列車手前の停止点までの距離を算出する地上装置と、を備える構成とし、前記車上装置は、前記地上装置から伝送された前記停止点までの距離に基づき自列車から停止点までの停止パターンを生成し、自列車が前記停止パターン以下の速度で走行するように走行制御を行うように構成する。
【発明の効果】
【0007】
本発明の一側面による列車制御システムによれば、固定無線機と車上無線機間の時分割多重アクセス方式による無線通信によって得られた前方列車手前の停止点までの距離に基づいて生成された停止パターン以下の速度で走行するように列車の走行制御を行う構成であるため、列車を前方列車の手前の停止点まで進行させることができ、該停止点の位置を適宜設定することにより、安全性を確保しつつ前方列車との間隔(列車間隔)を狭めることができる。
【図面の簡単な説明】
【0008】
【図1】本発明による列車制御システムの一実施形態を示すブロック図である。
【図2】上記実施形態の列車制御システムによる列車の走行制御を説明するための説明図である。
【図3】上記実施形態における無線通信において、固定無線機及び車上無線機に割当てられたタイムスロットを示す説明図である。
【発明を実施するための形態】
【0009】
以下、本発明の実施形態を添付図面に基づいて詳細に説明する。
図1は、本発明による列車制御システムの一実施形態を示すブロック図である。
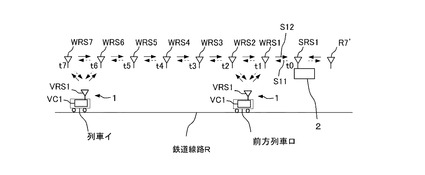
図1において、本実施形態の列車制御システム10は、列車の走行制御を行うものであり、車上無線機VRS1を備えた車上装置1と、複数の沿線無線機WRS1〜WRS7と、拠点無線機SRS1と、地上装置2と、を備えて構成される。なお、本実施形態において、上記拠点無線機SRS1と沿線無線機WRS1〜WRS7が、本発明に係る固定無線機に相当する。
【0010】
前記車上装置1は、鉄道線路R上を移動する列車に設けられ、自列車の走行制御を行うとともに、自列車の位置を検出するものであり、例えば、車上無線機VRS1と車上装置本体VC1とを備えて構成されている。
【0011】
前記車上無線機VRS1は、移動しながら前記複数の沿線無線機WRS1〜WRS7及び拠点無線機SRS1との間で各種情報を無線通信可能なものであり、車上装置本体VC1に接続されている。
【0012】
前記車上装置本体VC1は、車上無線機VRS1と例えば有線ケーブルで接続されており、該車上無線機VRS1で受信された各種情報に基づき、自列車の走行制御を行うとともに、自列車の列車位置を検出する。
【0013】
車上装置本体VC1は、車上無線機VRS1と固定無線機(WRS1〜WRS7、SRS1)との間の無線通信によって、自列車の列車位置を検出し、該列車位置の情報を車上無線機VRS1及び固定無線機(WRS1〜WRS7、SRS1)を介して地上装置2へ伝送させる。地上装置2へ伝送された列車イの位置情報は、当該列車イから前方列車ロ手前の停止点(図2参照)までの距離の算出に利用される。
【0014】
車上装置本体VC1は、具体的には、車上無線機VRS1と固定無線機との間の無線の送受信における電波の伝播遅延時間によって、固定無線機と車上無線機VRS1間の距離を測定(測距)し、例えば、この測距結果と車上装置本体VC1に予め記憶させた各沿線無線機の位置情報に基づいて、自列車の列車位置を検出し、この列車位置の情報を、各固定無線機を介して地上装置2に送信するように構成されている。
【0015】
また、車上装置本体VC1は、地上装置2から伝送される上記停止点までの距離に基づき自列車イから停止点までの停止パターン(図2参照)を生成し、自列車イが停止パターン以下の速度で走行するように走行制御を行う。この停止パターンとは、自列車イが停止点に到達して停止するまでの速度のパターンであり、例えば、図2に示すように、停止点に近づくにしたがって、列車速度は低くなり、停止点でゼロになるパターンである。
【0016】
前記拠点無線機SRS1は、例えば拠点駅に設けられ、地上装置2と有線ケーブルで接続されており、地上装置2から列車や沿線無線機への制御情報や制御指令を沿線無線機側へ無線送信し、列車や沿線無線機から地上装置2への情報を沿線無線機側から無線で受信する。
【0017】
前記沿線無線機WRS1〜WRS7は、車上無線機VRS1や拠点無線機SRS1と各種情報を送受信するもので、鉄道線路Rに沿って間隔を置いて複数個配置され、互いに隣り合うもの同士で無線通信して情報を中継しながら伝達する伝播型の無線機である。これら固定無線機(WRS1〜WRS7、SRS1)と車上無線機VRS1との間の各無線通信は、後述する時分割多重アクセス(TDMA)方式で行われる。
【0018】
前記地上装置2は、車上無線機VRS1と固定無線機との間の無線通信によって得られた列車の位置情報に基づいて、当該列車イから前方列車ロ手前の停止点までの距離を算出するものであり、算出した停止点までの距離の情報を車上無線機VRS1、拠点無線機SRS1及び複数の沿線無線機WRS1〜WRS7を介して車上装置本体VC1へ送信するように構成されている。なお、本実施形態においては、前記停止点は、図2に示すように、前方列車ロの後端から予め設定した余裕距離d0手前に設定した位置である。
【0019】
また、地上装置2は、車上無線機VRS1、拠点無線機SRS1及び複数の沿線無線機WRS1〜WRS7の通信を制御・管理する機能も備えており、車上無線機及び固定無線機が予め割当てられたタイムスロットのみ通信可能に時間同期された時分割多重アクセス(TDMA)方式で通信を行うように各無線機の通信の制御・管理を行う。
【0020】
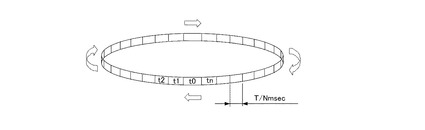
このように構築された各無線機(VRS1,WRS1〜WRS7、SRS1)間の無線通信のネットワーク(TDMAネットワーク)は、図3に示すように、1周期T(msec)をN個に分割したT/N(ms)で1回の送信を終わるように制御されている。N個の単位時間には、例えばt0,t1,t2,・・・tnのように連番が付けられている。最後のtnまで来るとt0に戻り、それらを繰り返す。このt0,t1,t2,・・・tnを一般形としてti(0≦i≦N−1)で表し、このtiをタイムスロットと呼び、iをタイムスロット番号と呼ぶ。また、Nはタイムスロット数である。例えば、1周期T(msec)は500msec、タイムスロット数Nは256、1タイムスロットT/Nは約2msecに設定する。なお、周期T、タイムスロット数N及びタイムスロットTは、これらに限らず、適宜設定することができる。
【0021】
前記無線通信ネットワーク(TDMAネットワーク)の1周期Tは、例えば、車上無線機VRS1と地上装置2によって選択された2つの沿線無線機WRS間の測距を行うための測距ブロック、車上無線機VRS1が送信元になるVRS送信ブロック、各無線機の送受信動作の同期をとるための同期ブロック等に区分して構成されている。そして、各ブロックは、所定数のタイムスロットで構成されている。
【0022】
また、地上装置2は、車上無線機VRS1との測距用の無線の送受信に供される固定無線機を選択する機能も有している。地上装置2は、例えば、列車の初期位置を認識しており、車上装置1からの列車位置の情報に基いて、列車位置を列車の移動に追従してリアルタイムに認識し、その近傍の前後2つの固定無線機を車上無線機VRS1との測距用の送受信に供する測距無線組として選択する。そして、地上装置2は、例えば、選択した測距無線組と車上無線機VRS1に対する測距指令を、拠点無線機SRS1及び沿線無線機を介して送信する。地上装置2は、例えば、図1に示すように、列車イが沿線無線機WRS6と沿線無線機WRS7の間に位置する場合、測距無線組としてWRS6及びWRS7を選択し、この測距無線組(WRS6−WRS7)及び列車イの車上無線機VRS1に対する測距指令を送信する。
【0023】
次に、本実施形態の列車制御システム10の列車位置の検出動作及び走行制御の動作を、図1〜図3に基づいて説明する。なお、図1に示すように、列車イが沿線無線機WRS6と沿線無線機WRS7の間を走行し、前方列車ロが沿線無線機WRS1と沿線無線機WRS2の間を走行している場合における列車イの位置検出及び走行制御について説明する。前方列車ロの走行制御については、前方列車ロの前方の列車(図示せず)の位置に基いて、列車イと同様に行われるため説明を省略する。また、地上装置2は、前回の車上装置1からの列車位置情報に基いて、列車イが沿線無線機WRS6と沿線無線機WRS7の間を走行していることを認識しているもとして、以下説明する。
【0024】
まず、列車位置の検出動作について説明する。
地上装置2は、列車イの車上無線機VRS1の近傍の前後2つの沿線無線機として、WRS6及びWRS7を選択し、この測距無線組(WRS6−WRS7)と列車イの車上無線機VRS1に対する測距指令を生成する。また、地上装置2は、前方列車ロの車上無線機VRS1の近傍の前後2つの沿線無線機として、WRS1及びWRS2を選択し、この測距無線組(WRS1−WRS2)と前方列車ロの車上無線機VRS1に対する測距指令を生成する。地上装置2によって生成された測距指令は、有線ケーブルを介して拠点無線機SRS1に送られる。拠点無線機SRS1は、自分に割当てられた送信用タイムスロットの時間になったときに、受信した測距指令を第1の沿線無線機WRS1に無線で送信し、第2の沿線無線機WRS2は測距指令を同じタイムスロットで受信する。第2の沿線無線機は、自分に割当てられた送信用タイムスロットの時間になったときに、受信した測距指令をその隣の第3の沿線無線機WRSに無線で送信する。以下、同様に沿線無線機間で送受信が行われ情報が順次中継されてこのネットワークの制御エリアの末端の沿線無線機まで伝達される。
【0025】
ここで、各沿線無線機WRS1〜WRS7及び車上無線機VRS1は、図1に示すように、順次伝播してくる指令に自局に対する指令が含まれている場合に、その指令を実行する。列車イの車上無線機VRS1及び測距無線機組WRS6−WRS7は、自局を指令先とする指令が含まれているため、測距ブロックにおける所定のタイムスロットの時間になったときに、測距用の無線の送受信を実行する。列車イの車上装置本体VC1は、この測距用の無線電波の伝播遅延時間に基づいて、無線機間(WRS6−VRS1、WRS7−VRS1)の距離をそれぞれ測定し、この測距結果と記憶部(図示せず)に予め記憶させた各沿線無線機の位置情報に基づいて、自列車イの列車位置を検出する。列車イの車上無線機VRS1は、自身に割当てられた送信用タイムスロットの時間になったときに、自列車イの列車位置情報を発信する。列車位置情報は、車上無線機VRS1に一番近い所に位置する沿線無線機によって受信される。列車位置情報を受信した沿線無線機は、自身に割当てられた送信用タイムスロットの時間になった時に受信した列車位置情報を拠点無線機SRS1の方向へ送信する。この送信された列車位置情報は、拠点無線機SRS1との間に存在する沿線無線機で前述したように時分割で順次中継され、拠点無線機SRS1及び有線ケーブルを介して地上装置2へ送られる。このように、地上装置2からの情報と列車からの情報の伝達方向は互いに逆方向となる。
【0026】
また、前方列車ロの車上無線機VRS1及び測距無線機組WRS1−WRS2は、自局を指令先とする指令が含まれているため、測距ブロックにおける所定のタイムスロットの時間になったときに、測距用の無線の送受信を実行する。前方列車ロの車上装置本体VC1は、無線機間(WRS1−VRS1、WRS2−VRS1)の測距結果と記憶部に予め記憶させた各沿線無線機の位置情報に基づいて、前方列車ロの列車位置を検出する。前方列車ロの車上装置本体VC1は、検出した列車位置の情報を、各固定無線機を介して地上装置2に送信する。例えば、図2に示すように、列車イ及び前方列車ロが走行しているとき、車上装置本体VC1は、各時刻(T1,T2,T3,・・・)における自列車イ及び前方列車ロの列車位置をリアルタイムに検出し、その列車位置情報を、各無線機(車上無線機及び固定無線機)を介して地上装置2へ随時送信する。
【0027】
次に、列車の走行制御の動作について説明する。
地上装置2は、列車イ及び前方列車ロの車上装置1から各固定無線機を介して伝送される各列車位置情報に基づいて、列車イから前方列車ロ手前の停止点までの距離を算出する。そして、地上装置2は、算出した停止点までの距離の情報を、測距指令と同様にして、拠点無線機SRS1、複数の沿線無線機WRS1〜WRS7及び車上無線機VRS1を介して車上装置本体VC1へ送信する。
【0028】
車上装置本体VC1は、地上装置2から伝送される停止点までの距離に基づき自列車イから停止点までの停止パターン(図2参照)を生成し、自列車イが停止パターン以下の速度で走行するように走行制御を行う。車上装置本体VC1は、例えば、従来の1固定閉塞区間長(例えば数百m)よりも余裕距離d0を短く設定し、列車イを前方列車ロの後端ぎりぎりまで進行させて停止させるように走行制御する。なお、車上装置本体VC1は、各時刻における距離情報に基き各時刻(T1,T2,T3,・・・)における停止パターンをそれぞれ生成している。このように、停止パターンは、前方列車までの距離に基いて、随時更新される。
【0029】
上記実施形態による列車制御システム10によれば、固定無線機と車上無線機間の時分割多重アクセス方式による無線通信によって得られた前方列車手前の停止点までの距離に基づいて生成された停止パターン以下の速度で走行するように列車の走行制御を行う構成であるため、列車を前方列車の手前の停止点まで進行させることができ、該停止点の位置を適宜設定することにより、安全性を維持しつつ前方列車との間隔(列車間隔)を狭めることができる。
【0030】
本実施形態においては、列車位置の検出は車上装置側で行い、車上装置1から列車情報を地上装置2に伝送するものとして説明したが、これに限らず、例えば、地上装置側で各列車位置の検出を行い、地上装置2からその検出結果に基づく列車位置情報を各列車の車上装置1に伝送ように構成してもよい。
【0031】
なお、本実施形態では、沿線無線機を7台として説明したが、沿線無線機の設置台数はこれに限るものでないことは言うまでもなく、例えば、地上装置2の制御対象エリアの長さに応じて沿線無線機の台数を増減するものである。
【符号の説明】
【0032】
1・・・・・・・・・・車上装置
2・・・・・・・・・・地上装置
10・・・・・・・・・列車制御システム
SRS1・・・・・・・拠点無線機
WRS1〜WRS7・・沿線無線機
VRS1・・・・・・・車上無線機
R・・・・・・・・・・鉄道線路
ロ・・・・・・・・・・前方列車
【技術分野】
【0001】
本発明は、列車の走行制御を行う列車制御システムに関し、特に、列車間隔を狭めて列車を走行させることが可能な列車制御システムに関する。
【背景技術】
【0002】
従来、列車の走行制御を行う列車制御システムが知られている。この種の列車制御システムとしては、例えば、特開2002−67957号公報に記載されているものが知られている。この列車制御システムは、例えば、列車の走行路(軌道)を、例えば、数百メートル間隔で区画した閉塞区間を設け、各閉塞区間単位で列車の走行制御を行うように構成されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2002−67957号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の列車制御システムは、閉塞区間単位での列車の走行制御であり、通常、1閉塞区間は数百メートルに設定されているため、自列車と前方列車間の距離(列車間隔)を、1閉そく区間より縮めることができず、列車間隔が長くなっていた。
【0005】
本発明は上記課題に着目してなされたもので、列車制御システムにおいて、列車間隔を狭めて、列車の走行制御を行うことが可能な列車制御システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本発明の一側面による列車制御システムは、鉄道線路上を移動する列車に設けられ無線通信可能な車上無線機を備えた車上装置と、前記鉄道線路に沿って配置され、前記車上無線機との間で、予め割当てられたタイムスロットのみ通信可能に時間同期された時分割多重アクセス方式による無線通信が可能な固定無線機と、前記車上無線機と前記固定無線機との間の前記無線通信によって得られた列車の位置情報に基づいて、当該列車から前方列車手前の停止点までの距離を算出する地上装置と、を備える構成とし、前記車上装置は、前記地上装置から伝送された前記停止点までの距離に基づき自列車から停止点までの停止パターンを生成し、自列車が前記停止パターン以下の速度で走行するように走行制御を行うように構成する。
【発明の効果】
【0007】
本発明の一側面による列車制御システムによれば、固定無線機と車上無線機間の時分割多重アクセス方式による無線通信によって得られた前方列車手前の停止点までの距離に基づいて生成された停止パターン以下の速度で走行するように列車の走行制御を行う構成であるため、列車を前方列車の手前の停止点まで進行させることができ、該停止点の位置を適宜設定することにより、安全性を確保しつつ前方列車との間隔(列車間隔)を狭めることができる。
【図面の簡単な説明】
【0008】
【図1】本発明による列車制御システムの一実施形態を示すブロック図である。
【図2】上記実施形態の列車制御システムによる列車の走行制御を説明するための説明図である。
【図3】上記実施形態における無線通信において、固定無線機及び車上無線機に割当てられたタイムスロットを示す説明図である。
【発明を実施するための形態】
【0009】
以下、本発明の実施形態を添付図面に基づいて詳細に説明する。
図1は、本発明による列車制御システムの一実施形態を示すブロック図である。
図1において、本実施形態の列車制御システム10は、列車の走行制御を行うものであり、車上無線機VRS1を備えた車上装置1と、複数の沿線無線機WRS1〜WRS7と、拠点無線機SRS1と、地上装置2と、を備えて構成される。なお、本実施形態において、上記拠点無線機SRS1と沿線無線機WRS1〜WRS7が、本発明に係る固定無線機に相当する。
【0010】
前記車上装置1は、鉄道線路R上を移動する列車に設けられ、自列車の走行制御を行うとともに、自列車の位置を検出するものであり、例えば、車上無線機VRS1と車上装置本体VC1とを備えて構成されている。
【0011】
前記車上無線機VRS1は、移動しながら前記複数の沿線無線機WRS1〜WRS7及び拠点無線機SRS1との間で各種情報を無線通信可能なものであり、車上装置本体VC1に接続されている。
【0012】
前記車上装置本体VC1は、車上無線機VRS1と例えば有線ケーブルで接続されており、該車上無線機VRS1で受信された各種情報に基づき、自列車の走行制御を行うとともに、自列車の列車位置を検出する。
【0013】
車上装置本体VC1は、車上無線機VRS1と固定無線機(WRS1〜WRS7、SRS1)との間の無線通信によって、自列車の列車位置を検出し、該列車位置の情報を車上無線機VRS1及び固定無線機(WRS1〜WRS7、SRS1)を介して地上装置2へ伝送させる。地上装置2へ伝送された列車イの位置情報は、当該列車イから前方列車ロ手前の停止点(図2参照)までの距離の算出に利用される。
【0014】
車上装置本体VC1は、具体的には、車上無線機VRS1と固定無線機との間の無線の送受信における電波の伝播遅延時間によって、固定無線機と車上無線機VRS1間の距離を測定(測距)し、例えば、この測距結果と車上装置本体VC1に予め記憶させた各沿線無線機の位置情報に基づいて、自列車の列車位置を検出し、この列車位置の情報を、各固定無線機を介して地上装置2に送信するように構成されている。
【0015】
また、車上装置本体VC1は、地上装置2から伝送される上記停止点までの距離に基づき自列車イから停止点までの停止パターン(図2参照)を生成し、自列車イが停止パターン以下の速度で走行するように走行制御を行う。この停止パターンとは、自列車イが停止点に到達して停止するまでの速度のパターンであり、例えば、図2に示すように、停止点に近づくにしたがって、列車速度は低くなり、停止点でゼロになるパターンである。
【0016】
前記拠点無線機SRS1は、例えば拠点駅に設けられ、地上装置2と有線ケーブルで接続されており、地上装置2から列車や沿線無線機への制御情報や制御指令を沿線無線機側へ無線送信し、列車や沿線無線機から地上装置2への情報を沿線無線機側から無線で受信する。
【0017】
前記沿線無線機WRS1〜WRS7は、車上無線機VRS1や拠点無線機SRS1と各種情報を送受信するもので、鉄道線路Rに沿って間隔を置いて複数個配置され、互いに隣り合うもの同士で無線通信して情報を中継しながら伝達する伝播型の無線機である。これら固定無線機(WRS1〜WRS7、SRS1)と車上無線機VRS1との間の各無線通信は、後述する時分割多重アクセス(TDMA)方式で行われる。
【0018】
前記地上装置2は、車上無線機VRS1と固定無線機との間の無線通信によって得られた列車の位置情報に基づいて、当該列車イから前方列車ロ手前の停止点までの距離を算出するものであり、算出した停止点までの距離の情報を車上無線機VRS1、拠点無線機SRS1及び複数の沿線無線機WRS1〜WRS7を介して車上装置本体VC1へ送信するように構成されている。なお、本実施形態においては、前記停止点は、図2に示すように、前方列車ロの後端から予め設定した余裕距離d0手前に設定した位置である。
【0019】
また、地上装置2は、車上無線機VRS1、拠点無線機SRS1及び複数の沿線無線機WRS1〜WRS7の通信を制御・管理する機能も備えており、車上無線機及び固定無線機が予め割当てられたタイムスロットのみ通信可能に時間同期された時分割多重アクセス(TDMA)方式で通信を行うように各無線機の通信の制御・管理を行う。
【0020】
このように構築された各無線機(VRS1,WRS1〜WRS7、SRS1)間の無線通信のネットワーク(TDMAネットワーク)は、図3に示すように、1周期T(msec)をN個に分割したT/N(ms)で1回の送信を終わるように制御されている。N個の単位時間には、例えばt0,t1,t2,・・・tnのように連番が付けられている。最後のtnまで来るとt0に戻り、それらを繰り返す。このt0,t1,t2,・・・tnを一般形としてti(0≦i≦N−1)で表し、このtiをタイムスロットと呼び、iをタイムスロット番号と呼ぶ。また、Nはタイムスロット数である。例えば、1周期T(msec)は500msec、タイムスロット数Nは256、1タイムスロットT/Nは約2msecに設定する。なお、周期T、タイムスロット数N及びタイムスロットTは、これらに限らず、適宜設定することができる。
【0021】
前記無線通信ネットワーク(TDMAネットワーク)の1周期Tは、例えば、車上無線機VRS1と地上装置2によって選択された2つの沿線無線機WRS間の測距を行うための測距ブロック、車上無線機VRS1が送信元になるVRS送信ブロック、各無線機の送受信動作の同期をとるための同期ブロック等に区分して構成されている。そして、各ブロックは、所定数のタイムスロットで構成されている。
【0022】
また、地上装置2は、車上無線機VRS1との測距用の無線の送受信に供される固定無線機を選択する機能も有している。地上装置2は、例えば、列車の初期位置を認識しており、車上装置1からの列車位置の情報に基いて、列車位置を列車の移動に追従してリアルタイムに認識し、その近傍の前後2つの固定無線機を車上無線機VRS1との測距用の送受信に供する測距無線組として選択する。そして、地上装置2は、例えば、選択した測距無線組と車上無線機VRS1に対する測距指令を、拠点無線機SRS1及び沿線無線機を介して送信する。地上装置2は、例えば、図1に示すように、列車イが沿線無線機WRS6と沿線無線機WRS7の間に位置する場合、測距無線組としてWRS6及びWRS7を選択し、この測距無線組(WRS6−WRS7)及び列車イの車上無線機VRS1に対する測距指令を送信する。
【0023】
次に、本実施形態の列車制御システム10の列車位置の検出動作及び走行制御の動作を、図1〜図3に基づいて説明する。なお、図1に示すように、列車イが沿線無線機WRS6と沿線無線機WRS7の間を走行し、前方列車ロが沿線無線機WRS1と沿線無線機WRS2の間を走行している場合における列車イの位置検出及び走行制御について説明する。前方列車ロの走行制御については、前方列車ロの前方の列車(図示せず)の位置に基いて、列車イと同様に行われるため説明を省略する。また、地上装置2は、前回の車上装置1からの列車位置情報に基いて、列車イが沿線無線機WRS6と沿線無線機WRS7の間を走行していることを認識しているもとして、以下説明する。
【0024】
まず、列車位置の検出動作について説明する。
地上装置2は、列車イの車上無線機VRS1の近傍の前後2つの沿線無線機として、WRS6及びWRS7を選択し、この測距無線組(WRS6−WRS7)と列車イの車上無線機VRS1に対する測距指令を生成する。また、地上装置2は、前方列車ロの車上無線機VRS1の近傍の前後2つの沿線無線機として、WRS1及びWRS2を選択し、この測距無線組(WRS1−WRS2)と前方列車ロの車上無線機VRS1に対する測距指令を生成する。地上装置2によって生成された測距指令は、有線ケーブルを介して拠点無線機SRS1に送られる。拠点無線機SRS1は、自分に割当てられた送信用タイムスロットの時間になったときに、受信した測距指令を第1の沿線無線機WRS1に無線で送信し、第2の沿線無線機WRS2は測距指令を同じタイムスロットで受信する。第2の沿線無線機は、自分に割当てられた送信用タイムスロットの時間になったときに、受信した測距指令をその隣の第3の沿線無線機WRSに無線で送信する。以下、同様に沿線無線機間で送受信が行われ情報が順次中継されてこのネットワークの制御エリアの末端の沿線無線機まで伝達される。
【0025】
ここで、各沿線無線機WRS1〜WRS7及び車上無線機VRS1は、図1に示すように、順次伝播してくる指令に自局に対する指令が含まれている場合に、その指令を実行する。列車イの車上無線機VRS1及び測距無線機組WRS6−WRS7は、自局を指令先とする指令が含まれているため、測距ブロックにおける所定のタイムスロットの時間になったときに、測距用の無線の送受信を実行する。列車イの車上装置本体VC1は、この測距用の無線電波の伝播遅延時間に基づいて、無線機間(WRS6−VRS1、WRS7−VRS1)の距離をそれぞれ測定し、この測距結果と記憶部(図示せず)に予め記憶させた各沿線無線機の位置情報に基づいて、自列車イの列車位置を検出する。列車イの車上無線機VRS1は、自身に割当てられた送信用タイムスロットの時間になったときに、自列車イの列車位置情報を発信する。列車位置情報は、車上無線機VRS1に一番近い所に位置する沿線無線機によって受信される。列車位置情報を受信した沿線無線機は、自身に割当てられた送信用タイムスロットの時間になった時に受信した列車位置情報を拠点無線機SRS1の方向へ送信する。この送信された列車位置情報は、拠点無線機SRS1との間に存在する沿線無線機で前述したように時分割で順次中継され、拠点無線機SRS1及び有線ケーブルを介して地上装置2へ送られる。このように、地上装置2からの情報と列車からの情報の伝達方向は互いに逆方向となる。
【0026】
また、前方列車ロの車上無線機VRS1及び測距無線機組WRS1−WRS2は、自局を指令先とする指令が含まれているため、測距ブロックにおける所定のタイムスロットの時間になったときに、測距用の無線の送受信を実行する。前方列車ロの車上装置本体VC1は、無線機間(WRS1−VRS1、WRS2−VRS1)の測距結果と記憶部に予め記憶させた各沿線無線機の位置情報に基づいて、前方列車ロの列車位置を検出する。前方列車ロの車上装置本体VC1は、検出した列車位置の情報を、各固定無線機を介して地上装置2に送信する。例えば、図2に示すように、列車イ及び前方列車ロが走行しているとき、車上装置本体VC1は、各時刻(T1,T2,T3,・・・)における自列車イ及び前方列車ロの列車位置をリアルタイムに検出し、その列車位置情報を、各無線機(車上無線機及び固定無線機)を介して地上装置2へ随時送信する。
【0027】
次に、列車の走行制御の動作について説明する。
地上装置2は、列車イ及び前方列車ロの車上装置1から各固定無線機を介して伝送される各列車位置情報に基づいて、列車イから前方列車ロ手前の停止点までの距離を算出する。そして、地上装置2は、算出した停止点までの距離の情報を、測距指令と同様にして、拠点無線機SRS1、複数の沿線無線機WRS1〜WRS7及び車上無線機VRS1を介して車上装置本体VC1へ送信する。
【0028】
車上装置本体VC1は、地上装置2から伝送される停止点までの距離に基づき自列車イから停止点までの停止パターン(図2参照)を生成し、自列車イが停止パターン以下の速度で走行するように走行制御を行う。車上装置本体VC1は、例えば、従来の1固定閉塞区間長(例えば数百m)よりも余裕距離d0を短く設定し、列車イを前方列車ロの後端ぎりぎりまで進行させて停止させるように走行制御する。なお、車上装置本体VC1は、各時刻における距離情報に基き各時刻(T1,T2,T3,・・・)における停止パターンをそれぞれ生成している。このように、停止パターンは、前方列車までの距離に基いて、随時更新される。
【0029】
上記実施形態による列車制御システム10によれば、固定無線機と車上無線機間の時分割多重アクセス方式による無線通信によって得られた前方列車手前の停止点までの距離に基づいて生成された停止パターン以下の速度で走行するように列車の走行制御を行う構成であるため、列車を前方列車の手前の停止点まで進行させることができ、該停止点の位置を適宜設定することにより、安全性を維持しつつ前方列車との間隔(列車間隔)を狭めることができる。
【0030】
本実施形態においては、列車位置の検出は車上装置側で行い、車上装置1から列車情報を地上装置2に伝送するものとして説明したが、これに限らず、例えば、地上装置側で各列車位置の検出を行い、地上装置2からその検出結果に基づく列車位置情報を各列車の車上装置1に伝送ように構成してもよい。
【0031】
なお、本実施形態では、沿線無線機を7台として説明したが、沿線無線機の設置台数はこれに限るものでないことは言うまでもなく、例えば、地上装置2の制御対象エリアの長さに応じて沿線無線機の台数を増減するものである。
【符号の説明】
【0032】
1・・・・・・・・・・車上装置
2・・・・・・・・・・地上装置
10・・・・・・・・・列車制御システム
SRS1・・・・・・・拠点無線機
WRS1〜WRS7・・沿線無線機
VRS1・・・・・・・車上無線機
R・・・・・・・・・・鉄道線路
ロ・・・・・・・・・・前方列車
【特許請求の範囲】
【請求項1】
鉄道線路上を移動する列車に設けられ無線通信可能な車上無線機を備えた車上装置と、
前記鉄道線路に沿って配置され、前記車上無線機との間で、予め割当てられたタイムスロットのみ通信可能に時間同期された時分割多重アクセス方式による無線通信が可能な固定無線機と、
前記車上無線機と前記固定無線機との間の前記無線通信によって得られた列車の位置情報に基づいて、当該列車から前方列車手前の停止点までの距離を算出する地上装置と、
を備える構成とし、
前記車上装置は、前記地上装置から伝送された前記停止点までの距離に基づき自列車から停止点までの停止パターンを生成し、自列車が前記停止パターン以下の速度で走行するように走行制御を行うことを特徴とする列車制御システム。
【請求項2】
前記停止点は、前記前方列車の後端から予め設定した余裕距離分手前に設定した位置であることを特徴とする請求項1に記載の列車制御システム。
【請求項3】
前記車上装置は、自列車の前記列車の位置を検出し、該列車位置の情報を前記車上無線機及び前記固定無線機を介して前記地上装置へ伝送させることを特徴とする請求項1又は2に記載の列車制御システム。
【請求項1】
鉄道線路上を移動する列車に設けられ無線通信可能な車上無線機を備えた車上装置と、
前記鉄道線路に沿って配置され、前記車上無線機との間で、予め割当てられたタイムスロットのみ通信可能に時間同期された時分割多重アクセス方式による無線通信が可能な固定無線機と、
前記車上無線機と前記固定無線機との間の前記無線通信によって得られた列車の位置情報に基づいて、当該列車から前方列車手前の停止点までの距離を算出する地上装置と、
を備える構成とし、
前記車上装置は、前記地上装置から伝送された前記停止点までの距離に基づき自列車から停止点までの停止パターンを生成し、自列車が前記停止パターン以下の速度で走行するように走行制御を行うことを特徴とする列車制御システム。
【請求項2】
前記停止点は、前記前方列車の後端から予め設定した余裕距離分手前に設定した位置であることを特徴とする請求項1に記載の列車制御システム。
【請求項3】
前記車上装置は、自列車の前記列車の位置を検出し、該列車位置の情報を前記車上無線機及び前記固定無線機を介して前記地上装置へ伝送させることを特徴とする請求項1又は2に記載の列車制御システム。
【図1】


【図2】

【図3】
【図2】
【図3】
【公開番号】特開2013−78210(P2013−78210A)
【公開日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願番号】特願2011−216711(P2011−216711)
【出願日】平成23年9月30日(2011.9.30)
【出願人】(000004651)日本信号株式会社 (720)
【Fターム(参考)】
【公開日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願日】平成23年9月30日(2011.9.30)
【出願人】(000004651)日本信号株式会社 (720)
【Fターム(参考)】
[ Back to top ]