
判別方法
【課題】ケーブル収容管を内部に配した管路の管内空間を占める物体を判別する。
【解決手段】管路Zの管内空間を占める物体をレーザ探査機50を用いて判別する判別方法であって、前記レーザ探査機50を、管路Zのケーブル収容管30の管軸に沿って移動させながら前記送信アンテナ51から電磁波パルスを送信し、前記送信アンテナ51から送信され、前記支持部材20にて反射した電磁波パルスの反射波を前記受信アンテナ53にて受信し、前記レーザ探査機50のケーブル収容管内における位置Dと、前記電磁パルスを送信してから前記反射波を受信するまでの到達時間差Tを2軸とする位置到達時間差曲線Uを作成し、作成した位置到達時間差曲線Uの特徴に基づいて、前記管路Zの管内空間を占める物体を判別する。
【解決手段】管路Zの管内空間を占める物体をレーザ探査機50を用いて判別する判別方法であって、前記レーザ探査機50を、管路Zのケーブル収容管30の管軸に沿って移動させながら前記送信アンテナ51から電磁波パルスを送信し、前記送信アンテナ51から送信され、前記支持部材20にて反射した電磁波パルスの反射波を前記受信アンテナ53にて受信し、前記レーザ探査機50のケーブル収容管内における位置Dと、前記電磁パルスを送信してから前記反射波を受信するまでの到達時間差Tを2軸とする位置到達時間差曲線Uを作成し、作成した位置到達時間差曲線Uの特徴に基づいて、前記管路Zの管内空間を占める物体を判別する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ケーブル収容管を内部に配した管路の管内空間を占める物体を判別する技術に関する。
【背景技術】
【0002】
下記文献1には、空洞探査装置1を用いて地中に埋設された埋設管2の周囲の空洞等の探査を行う技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−345118号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来のものは、境界面で反射した反射波を単に受信するものであり、管路の周囲に点在する空洞の有無しか検出できていなかった。
本発明は上記のような事情に基づいて完成されたものであって、ケーブル収容管を内部に配した管路の管内空間を占める物体を判別することを目的とする。
【課題を解決するための手段】
【0005】
本発明は、ケーブル収容管を内部に配した管路の管内空間を占める物体を、送信アンテナと受信アンテナを有するレーザ探査機を用いて判別する判別方法であって、前記管路の内部に、前記ケーブル収容管を挿通支持する支持孔を設けた板状の支持部材が一定間隔で設けられたものにおいて、前記レーザ探査機を前記ケーブル収容管の管軸に沿って移動させながら前記送信アンテナから電磁波パルスを送信し、前記送信アンテナから送信され、前記支持部材にて反射した電磁波パルスの反射波を前記受信アンテナにて受信し、前記レーザ探査機のケーブル収容管内における位置Dと、前記電磁パルスを送信してから前記反射波を受信するまでの到達時間差Tを2軸とする位置到達時間差曲線Uを作成し、作成した位置到達時間差曲線Uの特徴に基づいて、前記管路の管内空間を占める物体を判別するところに特徴を有する。尚、ここで言う物体には、モルタルなどの充填物や水に加えて空気が含まれる。
【0006】
この発明の実施態様として、以下のようにすることが好ましい。
・作成した位置到達時間差曲線Uの特徴を、位置到達時間差曲線Uの角度θとする。
・作成した位置到達時間差曲線Uの特徴を、位置到達時間差曲線Uの第一軸方向の幅Xとする。尚、位置到達時間差曲線Uを規定する2軸のうち、位置D側を第一軸とし、到達時間差T側を第二軸とする。
【発明の効果】
【0007】
本発明によれば、管路の管内空間を占める物体を判別できる。
【図面の簡単な説明】
【0008】
【図1】本発明の一実施形態において電力ケーブル用の埋設管構造を示す図
【図2】ケーブル収容管の支持構造を示す斜視図
【図3】ケーブル収容管の水平断面図
【図4】レーダ探査システムの構成を示す構成図
【図5】レーダ探査システムの構成を示すブロック図
【図6】位置到達時間差曲線Uを示す図
【図7】空気、モルタル、水について比誘電率と減衰率をまとめた図表
【図8】位置到達時間差曲線を示す図(空気の場合)
【図9】位置到達時間差曲線を示す図(モルタルの場合)
【図10】位置到達時間差曲線を示す図(水の場合)
【発明を実施するための形態】
【0009】
本発明の一実施形態を図1ないし図10によって説明する。
<電力ケーブルの埋設構造>
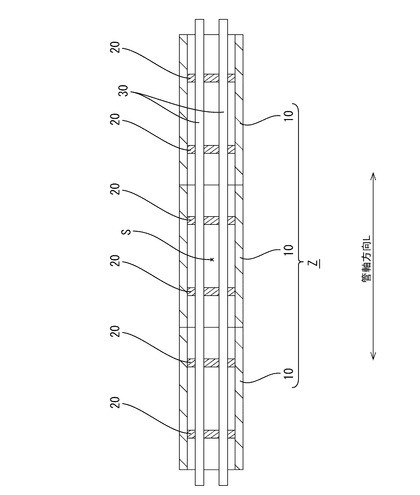
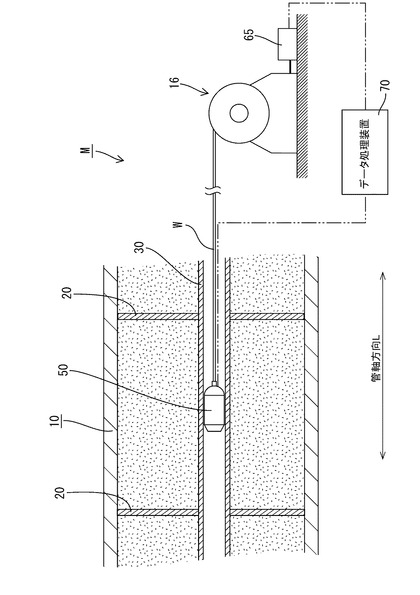
電力ケーブル埋設構造の一つに推進管10を用いたものがある。推進管10は、図1にて示すように管列を形成して管路Zを構成するものであり、例えば鉄筋コンクリート製である。そして、管路Zの内部には、支持部材20が一定間隔で取り付けられていて、管路Zに収容されたケーブル収容管(例えば、硬質の合成樹脂パイプ)30を支持する構造となっている。
【0010】
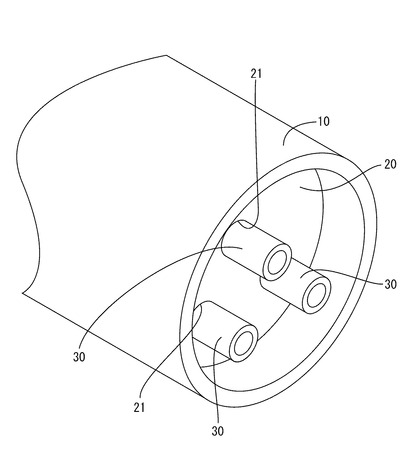
各支持部材20は、金属板製であって推進管10の内周とほぼ同径の円形状をしている。支持部材20は、支持孔21を貫通形成しており、推進管10内に配されるケーブル収容管30を挿通支持する。
【0011】
ところで、推進管10の管内空間Sには、モルタルなどの充填材を充填することが好ましい。これはケーブル収容管30の保持性能を高めると共に、ケーブル収容管30に収容された電力ケーブル(図略)の発生する熱を吸収できるからである。
【0012】
しかしながら、推進管10に対するモルタルの充填は圧入により行われるので、推進管10の一部にモルタルが行き渡らず、管内空間Sに空隙ができたり、そうした空隙に水が入り込む場合がある。本実施形態は、レーダ探査システムMを使用して、推進管10の管内空間Sが「モルタル」、「水」、「空気」のいずれで占められているか(満たされているか)を判別するものである。
【0013】
<レーダ探査システムMの説明>
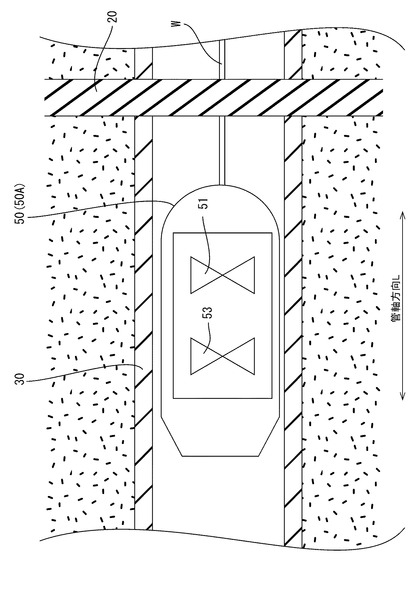
レータ探査システムMは、電磁波パルスレーダ探査機(以下、単にレーダ探査機)50と、巻き取り装置61と、位置カウンタ65と、データ処理装置70とから構成されている。レーダ探査機50は、筒状をなすケーシング50Aの内部に、電磁波パルスを送信する送信アンテナ51と、電磁波パルスの反射波を受信する受信アンテナ53とを備えた構造となっており、ケーブル収容管30に挿通可能となっている。
【0014】
本実施形態では、図3、図4に示すように、レーダ探査機50の先端(図3、4の右側の端部)に固定したワイヤWを巻き取り装置61にて巻き取ることで、レーダ探査機50がケーブル収容管30の管軸方向Lに沿って水平に移動できる構成となっている。そして、巻き取り装置61には位置カウンタ65が設けられていて、ワイヤWの巻取量をカウントすることで、ケーブル収容管内を移動するレーダ探査機50の位置(管軸方向Lの位置)を検出する構成となっている。
【0015】
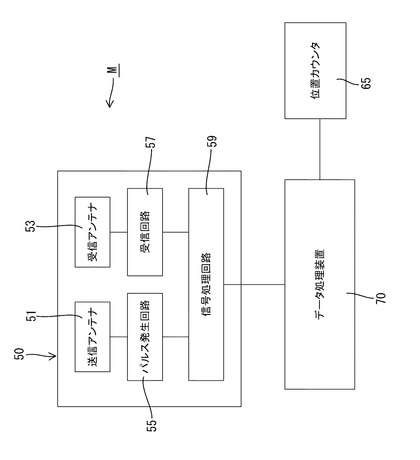
レーダ探査機50の電気的構成は、図5に示す通りであり、送信アンテナ51と、受信アンテナ53と、パルス発生回路55と、受信回路57、信号処理回路59とを備えた構成となっている。パルス発生回路55は、例えば、中心周波数1GHZの電磁波パルスを一定間隔(概ね50ns〜400nsごと)で発生するものである。受信回路57は受信アンテナ53にて受信した反射波を受信信号として信号処理するものである。
【0016】
信号処理回路59は、パルス発生回路55が電磁波パルスを発生するタイミングと受信回路57から出力される受信信号に基づいて電磁波パルスの到達時間差T、すなわち送信アンテナ51から電磁波パルスが送信されてから受信アンテナ53が反射波を受信するまで時間を計測するものである。尚、電磁波パルスの到達時間差Tは、電磁波パルスの送信間隔(概ね50ns〜400ns)より短い関係になっている。
【0017】
データ処理装置70は信号線を介して、位置カウンタ65と、レーダ探査機50にそれぞれ接続されている。そして、データ処理装置70は、位置カウンタ65の出力するカウント値(すなわち、レーダ探査機50の位置Dのデータ)と、レーダ探査機50の信号処理回路59の出力信号(すなわち、到達時間差Tのデータ)に基づいて、位置到達時間差曲線Uを作成するものである(図6参照)。
【0018】
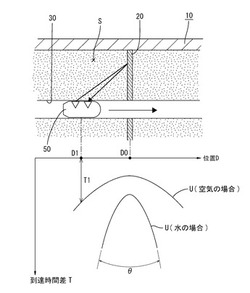
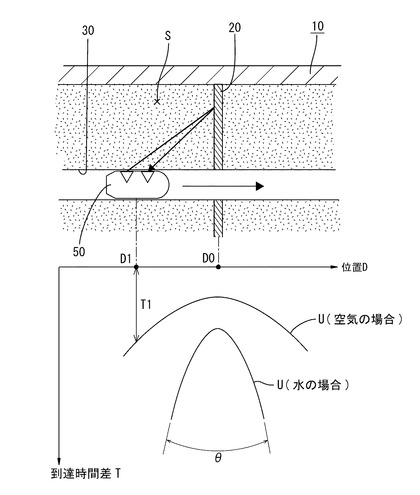
位置到達時間差曲線Uは「横軸(本発明の「第一軸」に相当)」に、ケーブル収容管30内におけるレーダ探査機50の管軸方向Lの位置Dをとり、「縦軸(本発明の「第二軸」に相当)」に到達時間差(電磁パルスを送信してから反射波を受信するまでの時間)Tをとったものであり、この位置到達時間差曲線Uに基づいて、推進管10の管内空間Sが「モルタル」、「水」、「空気(空隙)」の何で占められているか判別できる。
【0019】
具体的に説明すると、図6に示すように、ケーブル収容管30内のある位置D1にレーダ探査機50を置いて送信アンテナ51から電磁波パルスを出射すると、電磁波パルスは支持部材20にて反射し、その反射波が受信アンテナ53にて受信される。そして、レーダ探査機50から支持部材20までの距離が短くなれば、送信アンテナ51から出射された電磁波パルスの反射波が受信アンテナ53に戻るまでの距離が短くなることから、到達時間差Tは短くなる。
【0020】
そのため、ケーブル収容管30内に位置するレーダ探査機50を巻き取り装置61により管軸方向Lに移動させながら、ケーブル収容管30の各位置Dについて到達時間差Tを計測すると、レーダ探査機50が支持部材20の真下を通過する位置D0を頂点とする逆V字型の位置到達時間差曲線Uが得られる。
【0021】
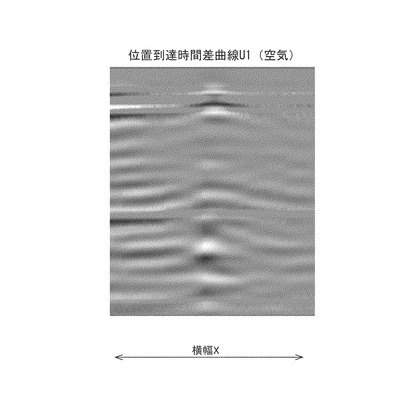
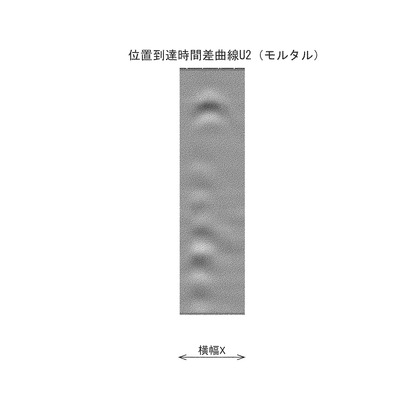
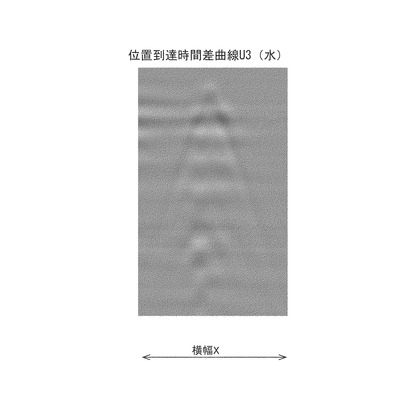
出願人の知見によれば、推進管10の管内空間Sが「空気」、「モルタル」、「水」の何で満たされているかに関係なく、位置到達時間差曲線Uは逆V字型となる。しかし、位置到達時間差曲線Uは、図8〜図10に示すように「空気」、「モルタル」、「水」で異なる波形となり、特に曲線の角度(V字の角度)θに違いが現れ、「水」、「モルタル」、「空気」の順で曲線の角度θが大きくなる(空気が最大)。
【0022】
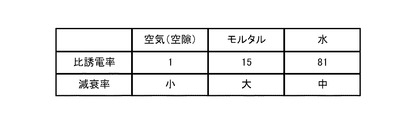
これは、図7に示すように比誘電率は「空気」が「1」、「モルタル」が「15」、「水」が「81」であり、電磁波パルスの伝搬速度が「水」、「モルタル」、「空気」の順で早くなるからである(空気が最速)。
【0023】
尚、図8〜図10の位置到達時間差曲線Uは、試験用の推進管10を用いて管軸方向Lの各位置Dにおける到達時間差Tをレーダ探査システムMを用いて実測して得たものであり、図8は管内空間Sを「空気」だけにした場合の位置到達時間差曲線U1、図9は管内空間Sを「モルタル」だけにした場合の位置到達時間差曲線U2、図10は管内空間Sを「水」だけにした場合の位置到達時間差曲線U3である。
【0024】
以上のことから、診断対象の推進管10について管内空間Sが「空気」、「モルタル」、「水」のうち、何で占められているのかを、次の要領で判別できる。すなわち、まず、診断対象の推進管10について管軸方向Lの各位置Dにおける到達時間差Tをレーダ探査システムMを用いて実測して、データ処理装置70にて位置到達時間差曲線Uを作成する。
【0025】
その後、データ処理装置70にて作成した位置到達時間差曲線Uを、試験により得た図8〜図10の位置到達時間差曲線U1〜U3と比較する。そして、データ処理装置70にて作成した位置到達時間差曲線Uが、図8〜図10に示す位置到達時間差曲線U1〜U3のうち、どの曲線Uに最も近いか、曲線の角度θに着目して見分けることで、診断対象の推進管10の管内空間Sが「空気」、「モルタル」、「水」の何で満たされているか判別できる。より具体的に言えば、管内空間Sが「空気だけ」で満たされているのか、「モルタルだけ」で満たされているのか、「水だけ」で満たされているのか判別できる。
尚、位置到達時間差曲線Uの角度θは、本発明の「位置到達時間差曲線Uの特徴」の一例である。
【0026】
また、図7にて示すように、電磁波パルスの減衰率は「モルタル」、「水」、「空気」の順に小さくなることから、位置到達時間差曲線Uの横幅Xは、図8〜図10に示すように、「空気」、「水」、「モルタル」の順に狭くなる。
【0027】
従って、診断対象の位置到達時間差曲線Uが、図8〜図10に示す位置到達時間差曲線U1〜U3のうち、どの曲線Uに最も近いか判断するにあたり、曲線Uの角度θに加え、曲線Uの横幅Xを判断材料に加えることで、診断対象の推進管10について管内空間Sが「空気」、「モルタル」、「水」のうち、何で占められているのか、より正確に判別できる。
【0028】
例えば、角度θで見分けがつかない場合に、横幅Xを比べることで、診断対象の位置到達時間差曲線Uが、図8〜図10に示す位置到達時間差曲線U1〜U3のうち、どの曲線Uに最も近いか正確に判断できる。そのため、診断対象の推進管10について管内空間Sが「空気」、「モルタル」、「水」のうち何で占められているのか、より正確に判別できる。尚、位置到達時間差曲線Uの横幅Xが、本発明の「位置到達時間差曲線Uの特徴」の一例である。
【0029】
<他の実施形態>
本発明は上記記述及び図面によって説明した実施形態に限定されるものではなく、例えば次のような実施形態も本発明の技術的範囲に含まれる。
【0030】
(1)本実施形態では、診断対象の推進管10について管内空間Sが「空気」、「モルタル」、「水」のうち、何で占められているのかを、位置到達時間差曲線Uに着目して判別する例を挙げた。具体的には、まず、位置到達時間差曲線Uの角度θに着目して判別を行い、位置到達時間差曲線Uの角度θだけでは判別が難しい場合に、位置到達時間差曲線Uの横幅Xに着目して判別することとした。
【0031】
本願発明は、診断対象の推進管10について管内空間Sが「空気」、「モルタル」、「水」のうち、何で占められているのかを、位置到達時間差曲線Uの特徴(角度θや横幅X)に着目して、判別するものであればよく、例えばまず、位置到達時間差曲線Uの横幅Xに着目して判別を行い、横幅Xだけでは判別が難しい場合に、位置到達時間差曲線Uの角度θに着目して判別を行うでもよい。
【0032】
(2)また、本実施形態では、診断対象の推進管10を測定して得た位置到達時間差曲線Uを、実験により得た3パターンの位置到達時間差曲線U1〜U3と比較して、どの曲線Uに最も近いかを見分けることにより、判別を行うようにした。
【0033】
本願発明は、診断対象の推進管10について管内空間Sが「空気」、「モルタル」、「水」のうち何で占められているのかを、位置到達時間差曲線Uの特徴に着目して判別するものであればよく、例えば、次のように位置到達時間差曲線Uの角度θや横幅Xのデータを数値化して比較してもよい。すなわち、まず、実験により得た3パターンの位置到達時間差曲線U1〜U3について各曲線Uの角度θ、横幅Xをそれぞれ算出して数値化しておく。
【0034】
一方、診断対象の推進管10の位置到達時間差曲線Uについても、データ処理装置70にて、位置到達時間差曲線Uの角度θや横幅Xを算出して数値化する。そして、数値化したデータ同士を比較することにより、診断対象の推進管10の位置到達時間差曲線Uが、実験により得た3パターンの位置到達時間差曲線U1〜U3のうち、どの曲線Uに近いか判別すればよい。
【0035】
(3)また、本実施形態では、管路Zの一例に推進管10を例示したが、本発明の適用範囲は推進管10に限定されるものではなく、管を鋼材で支持する橋梁添架管であってもよい。
【0036】
(4)また、本実施形態では、レーダ探査機50をケーブル収容管30内にて移動させるのに、巻き取り装置61を用いてレーダ探査機50をワイヤWで引っ張る例を示したが、これ以外にも、レーダ探査機50を押し込み棒で押し込むことにより移動させる構成や、レーダ探査機50を自走式にして移動させる構成にしてもよい。
【符号の説明】
【0037】
10…推進管
20…支持部材
30…ケーブル収容管
50…レーダ探査機
51…送信アンテナ
53…受信アンテナ
61…巻き取り装置
65…位置カウンタ
70…データ処理装置
Z…管路
【技術分野】
【0001】
本発明は、ケーブル収容管を内部に配した管路の管内空間を占める物体を判別する技術に関する。
【背景技術】
【0002】
下記文献1には、空洞探査装置1を用いて地中に埋設された埋設管2の周囲の空洞等の探査を行う技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−345118号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来のものは、境界面で反射した反射波を単に受信するものであり、管路の周囲に点在する空洞の有無しか検出できていなかった。
本発明は上記のような事情に基づいて完成されたものであって、ケーブル収容管を内部に配した管路の管内空間を占める物体を判別することを目的とする。
【課題を解決するための手段】
【0005】
本発明は、ケーブル収容管を内部に配した管路の管内空間を占める物体を、送信アンテナと受信アンテナを有するレーザ探査機を用いて判別する判別方法であって、前記管路の内部に、前記ケーブル収容管を挿通支持する支持孔を設けた板状の支持部材が一定間隔で設けられたものにおいて、前記レーザ探査機を前記ケーブル収容管の管軸に沿って移動させながら前記送信アンテナから電磁波パルスを送信し、前記送信アンテナから送信され、前記支持部材にて反射した電磁波パルスの反射波を前記受信アンテナにて受信し、前記レーザ探査機のケーブル収容管内における位置Dと、前記電磁パルスを送信してから前記反射波を受信するまでの到達時間差Tを2軸とする位置到達時間差曲線Uを作成し、作成した位置到達時間差曲線Uの特徴に基づいて、前記管路の管内空間を占める物体を判別するところに特徴を有する。尚、ここで言う物体には、モルタルなどの充填物や水に加えて空気が含まれる。
【0006】
この発明の実施態様として、以下のようにすることが好ましい。
・作成した位置到達時間差曲線Uの特徴を、位置到達時間差曲線Uの角度θとする。
・作成した位置到達時間差曲線Uの特徴を、位置到達時間差曲線Uの第一軸方向の幅Xとする。尚、位置到達時間差曲線Uを規定する2軸のうち、位置D側を第一軸とし、到達時間差T側を第二軸とする。
【発明の効果】
【0007】
本発明によれば、管路の管内空間を占める物体を判別できる。
【図面の簡単な説明】
【0008】
【図1】本発明の一実施形態において電力ケーブル用の埋設管構造を示す図
【図2】ケーブル収容管の支持構造を示す斜視図
【図3】ケーブル収容管の水平断面図
【図4】レーダ探査システムの構成を示す構成図
【図5】レーダ探査システムの構成を示すブロック図
【図6】位置到達時間差曲線Uを示す図
【図7】空気、モルタル、水について比誘電率と減衰率をまとめた図表
【図8】位置到達時間差曲線を示す図(空気の場合)
【図9】位置到達時間差曲線を示す図(モルタルの場合)
【図10】位置到達時間差曲線を示す図(水の場合)
【発明を実施するための形態】
【0009】
本発明の一実施形態を図1ないし図10によって説明する。
<電力ケーブルの埋設構造>
電力ケーブル埋設構造の一つに推進管10を用いたものがある。推進管10は、図1にて示すように管列を形成して管路Zを構成するものであり、例えば鉄筋コンクリート製である。そして、管路Zの内部には、支持部材20が一定間隔で取り付けられていて、管路Zに収容されたケーブル収容管(例えば、硬質の合成樹脂パイプ)30を支持する構造となっている。
【0010】
各支持部材20は、金属板製であって推進管10の内周とほぼ同径の円形状をしている。支持部材20は、支持孔21を貫通形成しており、推進管10内に配されるケーブル収容管30を挿通支持する。
【0011】
ところで、推進管10の管内空間Sには、モルタルなどの充填材を充填することが好ましい。これはケーブル収容管30の保持性能を高めると共に、ケーブル収容管30に収容された電力ケーブル(図略)の発生する熱を吸収できるからである。
【0012】
しかしながら、推進管10に対するモルタルの充填は圧入により行われるので、推進管10の一部にモルタルが行き渡らず、管内空間Sに空隙ができたり、そうした空隙に水が入り込む場合がある。本実施形態は、レーダ探査システムMを使用して、推進管10の管内空間Sが「モルタル」、「水」、「空気」のいずれで占められているか(満たされているか)を判別するものである。
【0013】
<レーダ探査システムMの説明>
レータ探査システムMは、電磁波パルスレーダ探査機(以下、単にレーダ探査機)50と、巻き取り装置61と、位置カウンタ65と、データ処理装置70とから構成されている。レーダ探査機50は、筒状をなすケーシング50Aの内部に、電磁波パルスを送信する送信アンテナ51と、電磁波パルスの反射波を受信する受信アンテナ53とを備えた構造となっており、ケーブル収容管30に挿通可能となっている。
【0014】
本実施形態では、図3、図4に示すように、レーダ探査機50の先端(図3、4の右側の端部)に固定したワイヤWを巻き取り装置61にて巻き取ることで、レーダ探査機50がケーブル収容管30の管軸方向Lに沿って水平に移動できる構成となっている。そして、巻き取り装置61には位置カウンタ65が設けられていて、ワイヤWの巻取量をカウントすることで、ケーブル収容管内を移動するレーダ探査機50の位置(管軸方向Lの位置)を検出する構成となっている。
【0015】
レーダ探査機50の電気的構成は、図5に示す通りであり、送信アンテナ51と、受信アンテナ53と、パルス発生回路55と、受信回路57、信号処理回路59とを備えた構成となっている。パルス発生回路55は、例えば、中心周波数1GHZの電磁波パルスを一定間隔(概ね50ns〜400nsごと)で発生するものである。受信回路57は受信アンテナ53にて受信した反射波を受信信号として信号処理するものである。
【0016】
信号処理回路59は、パルス発生回路55が電磁波パルスを発生するタイミングと受信回路57から出力される受信信号に基づいて電磁波パルスの到達時間差T、すなわち送信アンテナ51から電磁波パルスが送信されてから受信アンテナ53が反射波を受信するまで時間を計測するものである。尚、電磁波パルスの到達時間差Tは、電磁波パルスの送信間隔(概ね50ns〜400ns)より短い関係になっている。
【0017】
データ処理装置70は信号線を介して、位置カウンタ65と、レーダ探査機50にそれぞれ接続されている。そして、データ処理装置70は、位置カウンタ65の出力するカウント値(すなわち、レーダ探査機50の位置Dのデータ)と、レーダ探査機50の信号処理回路59の出力信号(すなわち、到達時間差Tのデータ)に基づいて、位置到達時間差曲線Uを作成するものである(図6参照)。
【0018】
位置到達時間差曲線Uは「横軸(本発明の「第一軸」に相当)」に、ケーブル収容管30内におけるレーダ探査機50の管軸方向Lの位置Dをとり、「縦軸(本発明の「第二軸」に相当)」に到達時間差(電磁パルスを送信してから反射波を受信するまでの時間)Tをとったものであり、この位置到達時間差曲線Uに基づいて、推進管10の管内空間Sが「モルタル」、「水」、「空気(空隙)」の何で占められているか判別できる。
【0019】
具体的に説明すると、図6に示すように、ケーブル収容管30内のある位置D1にレーダ探査機50を置いて送信アンテナ51から電磁波パルスを出射すると、電磁波パルスは支持部材20にて反射し、その反射波が受信アンテナ53にて受信される。そして、レーダ探査機50から支持部材20までの距離が短くなれば、送信アンテナ51から出射された電磁波パルスの反射波が受信アンテナ53に戻るまでの距離が短くなることから、到達時間差Tは短くなる。
【0020】
そのため、ケーブル収容管30内に位置するレーダ探査機50を巻き取り装置61により管軸方向Lに移動させながら、ケーブル収容管30の各位置Dについて到達時間差Tを計測すると、レーダ探査機50が支持部材20の真下を通過する位置D0を頂点とする逆V字型の位置到達時間差曲線Uが得られる。
【0021】
出願人の知見によれば、推進管10の管内空間Sが「空気」、「モルタル」、「水」の何で満たされているかに関係なく、位置到達時間差曲線Uは逆V字型となる。しかし、位置到達時間差曲線Uは、図8〜図10に示すように「空気」、「モルタル」、「水」で異なる波形となり、特に曲線の角度(V字の角度)θに違いが現れ、「水」、「モルタル」、「空気」の順で曲線の角度θが大きくなる(空気が最大)。
【0022】
これは、図7に示すように比誘電率は「空気」が「1」、「モルタル」が「15」、「水」が「81」であり、電磁波パルスの伝搬速度が「水」、「モルタル」、「空気」の順で早くなるからである(空気が最速)。
【0023】
尚、図8〜図10の位置到達時間差曲線Uは、試験用の推進管10を用いて管軸方向Lの各位置Dにおける到達時間差Tをレーダ探査システムMを用いて実測して得たものであり、図8は管内空間Sを「空気」だけにした場合の位置到達時間差曲線U1、図9は管内空間Sを「モルタル」だけにした場合の位置到達時間差曲線U2、図10は管内空間Sを「水」だけにした場合の位置到達時間差曲線U3である。
【0024】
以上のことから、診断対象の推進管10について管内空間Sが「空気」、「モルタル」、「水」のうち、何で占められているのかを、次の要領で判別できる。すなわち、まず、診断対象の推進管10について管軸方向Lの各位置Dにおける到達時間差Tをレーダ探査システムMを用いて実測して、データ処理装置70にて位置到達時間差曲線Uを作成する。
【0025】
その後、データ処理装置70にて作成した位置到達時間差曲線Uを、試験により得た図8〜図10の位置到達時間差曲線U1〜U3と比較する。そして、データ処理装置70にて作成した位置到達時間差曲線Uが、図8〜図10に示す位置到達時間差曲線U1〜U3のうち、どの曲線Uに最も近いか、曲線の角度θに着目して見分けることで、診断対象の推進管10の管内空間Sが「空気」、「モルタル」、「水」の何で満たされているか判別できる。より具体的に言えば、管内空間Sが「空気だけ」で満たされているのか、「モルタルだけ」で満たされているのか、「水だけ」で満たされているのか判別できる。
尚、位置到達時間差曲線Uの角度θは、本発明の「位置到達時間差曲線Uの特徴」の一例である。
【0026】
また、図7にて示すように、電磁波パルスの減衰率は「モルタル」、「水」、「空気」の順に小さくなることから、位置到達時間差曲線Uの横幅Xは、図8〜図10に示すように、「空気」、「水」、「モルタル」の順に狭くなる。
【0027】
従って、診断対象の位置到達時間差曲線Uが、図8〜図10に示す位置到達時間差曲線U1〜U3のうち、どの曲線Uに最も近いか判断するにあたり、曲線Uの角度θに加え、曲線Uの横幅Xを判断材料に加えることで、診断対象の推進管10について管内空間Sが「空気」、「モルタル」、「水」のうち、何で占められているのか、より正確に判別できる。
【0028】
例えば、角度θで見分けがつかない場合に、横幅Xを比べることで、診断対象の位置到達時間差曲線Uが、図8〜図10に示す位置到達時間差曲線U1〜U3のうち、どの曲線Uに最も近いか正確に判断できる。そのため、診断対象の推進管10について管内空間Sが「空気」、「モルタル」、「水」のうち何で占められているのか、より正確に判別できる。尚、位置到達時間差曲線Uの横幅Xが、本発明の「位置到達時間差曲線Uの特徴」の一例である。
【0029】
<他の実施形態>
本発明は上記記述及び図面によって説明した実施形態に限定されるものではなく、例えば次のような実施形態も本発明の技術的範囲に含まれる。
【0030】
(1)本実施形態では、診断対象の推進管10について管内空間Sが「空気」、「モルタル」、「水」のうち、何で占められているのかを、位置到達時間差曲線Uに着目して判別する例を挙げた。具体的には、まず、位置到達時間差曲線Uの角度θに着目して判別を行い、位置到達時間差曲線Uの角度θだけでは判別が難しい場合に、位置到達時間差曲線Uの横幅Xに着目して判別することとした。
【0031】
本願発明は、診断対象の推進管10について管内空間Sが「空気」、「モルタル」、「水」のうち、何で占められているのかを、位置到達時間差曲線Uの特徴(角度θや横幅X)に着目して、判別するものであればよく、例えばまず、位置到達時間差曲線Uの横幅Xに着目して判別を行い、横幅Xだけでは判別が難しい場合に、位置到達時間差曲線Uの角度θに着目して判別を行うでもよい。
【0032】
(2)また、本実施形態では、診断対象の推進管10を測定して得た位置到達時間差曲線Uを、実験により得た3パターンの位置到達時間差曲線U1〜U3と比較して、どの曲線Uに最も近いかを見分けることにより、判別を行うようにした。
【0033】
本願発明は、診断対象の推進管10について管内空間Sが「空気」、「モルタル」、「水」のうち何で占められているのかを、位置到達時間差曲線Uの特徴に着目して判別するものであればよく、例えば、次のように位置到達時間差曲線Uの角度θや横幅Xのデータを数値化して比較してもよい。すなわち、まず、実験により得た3パターンの位置到達時間差曲線U1〜U3について各曲線Uの角度θ、横幅Xをそれぞれ算出して数値化しておく。
【0034】
一方、診断対象の推進管10の位置到達時間差曲線Uについても、データ処理装置70にて、位置到達時間差曲線Uの角度θや横幅Xを算出して数値化する。そして、数値化したデータ同士を比較することにより、診断対象の推進管10の位置到達時間差曲線Uが、実験により得た3パターンの位置到達時間差曲線U1〜U3のうち、どの曲線Uに近いか判別すればよい。
【0035】
(3)また、本実施形態では、管路Zの一例に推進管10を例示したが、本発明の適用範囲は推進管10に限定されるものではなく、管を鋼材で支持する橋梁添架管であってもよい。
【0036】
(4)また、本実施形態では、レーダ探査機50をケーブル収容管30内にて移動させるのに、巻き取り装置61を用いてレーダ探査機50をワイヤWで引っ張る例を示したが、これ以外にも、レーダ探査機50を押し込み棒で押し込むことにより移動させる構成や、レーダ探査機50を自走式にして移動させる構成にしてもよい。
【符号の説明】
【0037】
10…推進管
20…支持部材
30…ケーブル収容管
50…レーダ探査機
51…送信アンテナ
53…受信アンテナ
61…巻き取り装置
65…位置カウンタ
70…データ処理装置
Z…管路
【特許請求の範囲】
【請求項1】
ケーブル収容管を内部に配した管路の管内空間を占める物体を、送信アンテナと受信アンテナを有するレーザ探査機を用いて判別する判別方法であって、
前記管路の内部に、前記ケーブル収容管を挿通支持する支持孔を設けた板状の支持部材が一定間隔で設けられたものにおいて、
前記レーザ探査機を前記ケーブル収容管の管軸に沿って移動させながら前記送信アンテナから電磁波パルスを送信し、
前記送信アンテナから送信され、前記支持部材にて反射した電磁波パルスの反射波を前記受信アンテナにて受信し、
前記レーザ探査機のケーブル収容管内における位置Dと、前記電磁パルスを送信してから前記反射波を受信するまでの到達時間差Tを2軸とする位置到達時間差曲線Uを作成し、
作成した位置到達時間差曲線Uの特徴に基づいて、前記管路の管内空間を占める物体を判別することを特徴とする判別方法。
【請求項2】
作成した位置到達時間差曲線Uの特徴は、位置到達時間差曲線Uの角度θであることを特徴とする請求項1に記載の判別方法。
【請求項3】
前記2軸のうち、位置D側を第一軸、到達時間差T側を第二軸と定義したときに、
作成した位置到達時間差曲線Uの特徴は、位置到達時間差曲線Uの前記第一軸方向の幅Xであることを特徴とする請求項1に記載の判別方法。
【請求項1】
ケーブル収容管を内部に配した管路の管内空間を占める物体を、送信アンテナと受信アンテナを有するレーザ探査機を用いて判別する判別方法であって、
前記管路の内部に、前記ケーブル収容管を挿通支持する支持孔を設けた板状の支持部材が一定間隔で設けられたものにおいて、
前記レーザ探査機を前記ケーブル収容管の管軸に沿って移動させながら前記送信アンテナから電磁波パルスを送信し、
前記送信アンテナから送信され、前記支持部材にて反射した電磁波パルスの反射波を前記受信アンテナにて受信し、
前記レーザ探査機のケーブル収容管内における位置Dと、前記電磁パルスを送信してから前記反射波を受信するまでの到達時間差Tを2軸とする位置到達時間差曲線Uを作成し、
作成した位置到達時間差曲線Uの特徴に基づいて、前記管路の管内空間を占める物体を判別することを特徴とする判別方法。
【請求項2】
作成した位置到達時間差曲線Uの特徴は、位置到達時間差曲線Uの角度θであることを特徴とする請求項1に記載の判別方法。
【請求項3】
前記2軸のうち、位置D側を第一軸、到達時間差T側を第二軸と定義したときに、
作成した位置到達時間差曲線Uの特徴は、位置到達時間差曲線Uの前記第一軸方向の幅Xであることを特徴とする請求項1に記載の判別方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2012−215427(P2012−215427A)
【公開日】平成24年11月8日(2012.11.8)
【国際特許分類】
【出願番号】特願2011−79704(P2011−79704)
【出願日】平成23年3月31日(2011.3.31)
【出願人】(000213297)中部電力株式会社 (811)
【Fターム(参考)】
【公開日】平成24年11月8日(2012.11.8)
【国際特許分類】
【出願日】平成23年3月31日(2011.3.31)
【出願人】(000213297)中部電力株式会社 (811)
【Fターム(参考)】
[ Back to top ]