
判定装置

【課題】ユーザがストレスを感じる状況にあるか否かをより適切に判定することができる。
【解決手段】 判定装置は、所定の情報を取得する取得手段と、取得した前記情報を用いて、ユーザがストレスを感じる状況にあるか否かを判定する判定手段と、前記判定手段で、ストレスを感じる状況であると判定された場合、所定のストレス軽減アクションを実行する実行手段と、を備える。
【解決手段】 判定装置は、所定の情報を取得する取得手段と、取得した前記情報を用いて、ユーザがストレスを感じる状況にあるか否かを判定する判定手段と、前記判定手段で、ストレスを感じる状況であると判定された場合、所定のストレス軽減アクションを実行する実行手段と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、判定装置に関する。
【背景技術】
【0002】
特許文献1には、ユーザの疲労を考慮して所定の音声ガイダンスを出力する車載用ナビゲーション装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2011−75395号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記文献に記載の車載用ナビゲーション装置は、運転距離や運転時間に応じて所定の音声ガイダンスを出力する。しかしながら、このような従来技術では、運転中のユーザがストレスを感じる状況にあるか否かを判定することはできない。
【0005】
そこで、本発明は、ストレスを感じる状況にあるか否かをより適切に判定することができる判定装置の提供を目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するため、本発明に係る判定装置は、所定の情報を取得する取得手段と、取得した前記情報を用いて、ユーザがストレスを感じる状況にあるか否かを判定する判定手段と、前記判定手段で、ストレスを感じる状況であると判定された場合、所定のストレス軽減アクションを実行する実行手段と、を備える。
【発明の効果】
【0007】
本発明に係る判定装置によれば、ユーザがストレスを感じる状況にあるか否かをより適切に判定することができる。
【図面の簡単な説明】
【0008】
【図1】本発明の一実施形態の概略構成を示す図である。
【図2】本発明の一実施形態に係る判定装置の概略構成を示す図である。
【図3】本発明の一実施形態に係る領域情報を示す図である。
【図4】本発明の一実施形態に係るプローブデータを示す図である。
【図5】本発明の一実施形態に係る車載カメラの撮像エリアを示す図である。
【図6】本発明の一実施形態に係る判定装置の機能ブロックを示す図である。
【図7】本発明の一実施形態に係るストレス判定処理Aのフローを示す図である。
【図8】本発明の一実施形態に係るストレス判定処理Bのフローを示す図である。
【図9】本発明の一実施形態に係るストレス判定処理Cのフローを示す図である。
【図10】本発明の一実施形態に係る詳細判定処理aのフローを示す図である。
【図11】本発明の一実施形態に係る詳細判定処理bのフローを示す図である。
【図12】本発明の一実施形態に係る詳細判定処理cのフローを示す図である。
【図13】本発明の一実施形態に係る詳細判定処理dのフローを示す図である。
【図14】本発明の一実施形態に係る詳細判定処理eのフローを示す図である。
【図15】本発明の一実施形態に係るストレス軽減アクション処理のフローを示す図である。
【発明を実施するための形態】
【0009】
以下、本発明の一実施形態に係る判定装置について説明する。
【0010】
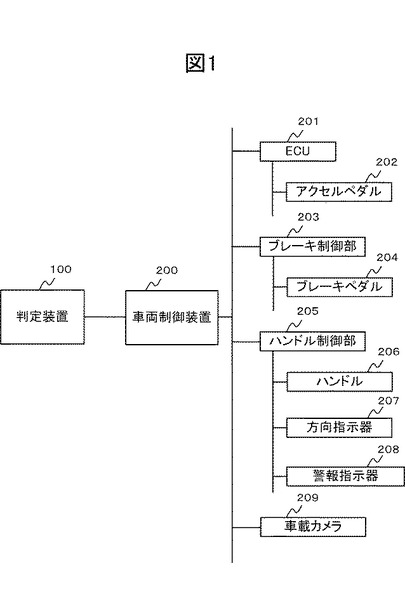
図1は、本実施形態の概略構成を示した図である。図示するように、本実施形態に係る判定装置100は、車両制御装置200に接続され、運転中のユーザがストレスを感じる状況にあるか否かを判定する。
【0011】
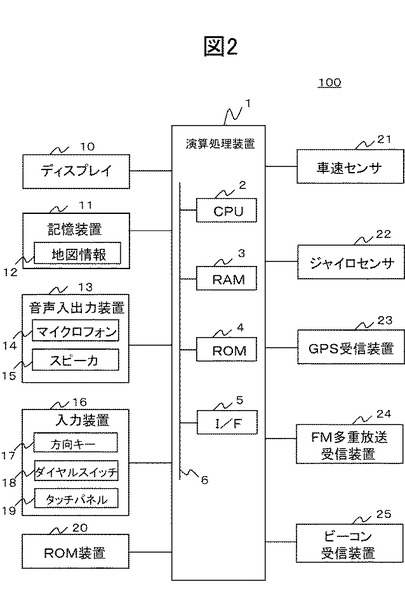
図2は、判定装置100の概略構成を示した図である。ここで、判定装置100は、推奨経路の探索や交通情報の表示といった、いわゆるナビゲーション機能を有するナビゲーション装置によって実現することができる。
【0012】
判定装置100は、演算処理装置1と、ディスプレイ10と、記憶装置11と、音声入出力装置13と、入力装置16と、ROM装置20と、車速センサ21と、ジャイロセンサ22と、GPS受信装置23と、FM多重放送受信装置24と、ビーコン受信装置25と、を備えている。また、これらの各装置やセンサは、バス6によって相互に接続され、データの受け渡しが可能な構成となっている。
【0013】
演算処理装置1は、判定装置100の様々な処理を行う中心的なユニットである。演算処理装置1は、例えば、車速センサ21、ジャイロセンサ22といった各種センサや、GPS受信装置23などから出力される情報を用いて、ユーザの現在地を特定する。
【0014】
また、演算処理装置1は、記憶装置11に格納されている地図情報12を用いて、出発地および目的地を結ぶ推奨経路を探索する。
【0015】
また、演算処理装置1は、地図情報12、交通情報、誘導経路情報などをグラフィックス変換し、ディスプレイ10に出力する。
【0016】
また、演算処理装置1は、経路誘導を行うための音声情報を生成し、これをスピーカ15に出力する。
【0017】
また、演算処理装置1は、車両制御装置200から取得した所定の情報を用いて、所定のタイミング(例えば、1秒ごと)でプローブデータを生成する。なお、プローブデータの詳細は後述する。
【0018】
また、演算処理装置1は、車載カメラで撮像された画像情報を解析し、所定の被写体が写っているか否かを判定する。
【0019】
なお、演算処理装置1は、数値演算、各装置およびセンサの制御など、様々な処理を実行するCPU2(Central Processing Unit)と、プログラムやデータ、演算結果などを一時的に格納するRAM3と、プログラムやデータなどを格納するROM4(Read Only Memory)と、各種ハードウェアを演算処理装置と接続するためのI/F(インターフェース)5と、を有している。また、CPU2、RAM3、ROM4は、バス6によって相互に接続されている。
【0020】
ディスプレイ10は、演算処理装置1により生成されたグラフィックス情報を表示領域に表示させるユニットである。ディスプレイ10は、例えば、液晶ディスプレイ、有機ELディスプレイなどで構成される。
【0021】
記憶装置11は、例えば、HDD(Hard Disk Drive)や不揮発性メモリカードといった、少なくとも読み書きが可能な記録媒体で構成される。記憶装置11には、例えば、ナビゲーション機能に用いられる地図情報12、交通情報、経路情報、区間情報、辞書情報、などが格納されている。
【0022】
例えば、地図情報12には、地図上の道路に関する情報であるリンク情報などを含む領域情報が格納されている。図3は、領域情報300を示した図である。領域情報300は、地図上の各領域が有するリンク情報303を含んだ情報である。なお、リンクとは、例えば、交差点などの各ノード間を結ぶ道路を意味し、リンク情報303には、かかる道路に関する情報が格納されている。
【0023】
領域情報300は、地図上の領域を識別するメッシュID301ごとに、各メッシュが有する道路のリンクID302と、各リンクID302に対応付けられているリンク情報303と、を有している。また、リンク情報303は、道路の両端を示す開始ノードおよび終了ノードの地点座標304と、一般道、有料道路、国道、県道といった道路の種別を示す道路種別情報305と、道路の名称が格納される道路名称情報306と、道路の長さを示すリンク長情報307と、道路を通過するのに要する時間を示す旅行時間情報308と、道路の開始ノードおよび終了ノードの各々に接続する他の道路のリンクIDが格納されている開始接続リンク/終了接続リンク情報309と、リンクの制限速度が格納されている制限速度情報310と、を有している。
【0024】
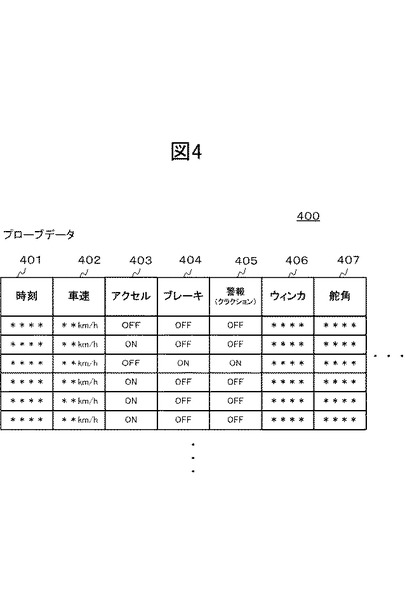
また、記憶装置11には、例えば、演算処理装置1によって生成されたプローブデータが格納されている。図4は、プローブデータ400を示した図である。プローブデータ400は、例えば、ハンドルやアクセルペダルなどの車両操作や車速などに関する所定の情報を有している。具体的には、プローブデータ400は、プローブデータ400の生成時刻が格納される時刻フィールド401と、車速が格納される車速フィールド402と、アクセルペダル操作に関する情報が格納されるアクセルフィールド403と、ブレーキペダル操作に関する情報が格納されるブレーキフィールド404と、警報指示器(クラクション)の操作に関する情報が格納される警報フィールド405と、方向指示器の操作に関する情報が格納されるウィンカフィールド406と、ハンドルの回転量に応じた舵角が格納される舵角フィールド407と、からなるレコードを所定数(例えば、最大1000個)有している。なお、蓄積されるレコードが最大数まで達すると、最も古い時刻が格納されているレコードから順に削除される。
【0025】
また、アクセルフィールド403、ブレーキフィールド404、警報フィールド405には、図示するように、「ON」または「OFF」といった情報が格納される。例えば、アクセルペダル、ブレーキペダルが踏み込まれた際に生成されたレコードには、これらのフィールドに「ON」が格納される。また、警報指示器が押された際(警報が鳴らされた際)に生成されたレコードの警報フィールド405には「ON」が格納される。なお、アクセルペダル、ブレーキペダルが踏み込まれている間に生成されたレコードのアクセルフィールド403、ブレーキフィールド404には、各々、「ON」が格納され続けることになる。
【0026】
図2に戻って説明する。音声入出力装置13は、音声入力装置16としてのマイクロフォン14と、音声出力装置としてのスピーカ15と、を備える。マイクロフォン14は、ユーザが発した声など、判定装置100の外部音声を採取する。また、スピーカ15は、演算処理装置1で生成したユーザへのメッセージを音声信号として出力する。
【0027】
入力装置16は、判定装置100がユーザから所定の指示を受け付けるための装置である。具体的には、方向キー17、ダイヤルスイッチ18、タッチパネル19、その他のハードスイッチ(図示しない)である縮尺変更キーなどで構成される。
【0028】
方向キー17は、例えば、上下左右および各斜め方向を示す8つのハードスイッチから構成され、ディスプレイ10に表示されるメニュー項目の選択や、地図画像のスクロール方向を決定する際に用いられる。方向キー17によって示される各方向は、選択するメニュー項目の移動方向や、ディスプレイ10の表示エリアの移動方向を示す。
【0029】
ダイヤルスイッチ18は、時計回り及び反時計回りに回転可能に構成され、所定の角度の回転ごとにパルス信号を発生し、演算処理装置1に出力する。演算処理装置1に入力されたパルス信号の数から、ダイヤルスイッチ18の回転角度が求められる。
【0030】
タッチパネル19は、ディスプレイ10の表示面側に搭載され、表示画面を透視可能である。タッチパネル19は、人の指によるタッチや専用のタッチペンによるタッチを検知する。使用者によるタッチ位置は、例えば、タッチパネル19上に設定されるXY座標に基づき特定される。このようなタッチパネル19は、例えば、静電容量方式による入力検出素子などで構成される。
【0031】
ROM装置20は、CD−ROMやDVD−ROMなどのROM(Read Only Memory)や、IC(Integrated Circuit)カードといった、少なくとも読み取りが可能な記録媒体で構成されている。この記録媒体には、例えば、動画情報、音声情報、音楽情報などが記録されている。
【0032】
車速センサ21、ジャイロセンサ22およびGPS受信装置23は、判定装置100が搭載される車両の現在地を検出するために使用される。
【0033】
車速センサ21は、車速の算出に用いられる情報を出力する。具体的には、車速センサ21は、検出した車輪の回転数をパルス信号に変換し、所定の時間内におけるパルス信号数といった所定の情報を出力する。
【0034】
ジャイロセンサ22は、光ファイバジャイロや振動ジャイロなどで構成され、移動体の回転による角速度を検出する。
【0035】
GPS受信装置23は、GPS衛星からの信号を受信して、車両とGPS衛星間の距離と、距離の変化率を3個以上の衛星に対して測定することで、車両の現在地、進行速度および進行方位を測定する。
【0036】
FM多重放送受信装置24は、FM放送局から送られてくるFM多重放送信号を受信する。FM多重放送には、VICS(Vehicle Information Communication System:格納商標)情報の概略現況交通情報、規制情報、SA/PA(サービスエリア/パーキングエリア)情報、駐車場情報、天気情報などや、FM多重一般情報としてラジオ局が提供する文字情報などがある。
【0037】
ビーコン受信装置25は、VICS情報などの概略現況交通情報、規制情報、SA/PA(サービスエリア/パーキングエリア)情報、駐車場情報、天気情報や緊急警報などを受信する。例えば、光により通信する光ビーコン、電波により通信する電波ビーコンなどの受信装置である。
【0038】
再び図1に戻り、判定装置100に接続されている車両制御装置200および車両の各制御部について説明する。
【0039】
車両制御装置200は、車両の動作などを総合的に制御する制御装置である。具体的には、車両制御装置200は、ECU201およびブレーキ制御部203から、各々、アクセルペダル202およびブレーキペダル204が踏み込まれたことを示す所定の信号を受信する。また、車両制御装置200は、ハンドル制御部205から、ハンドル206の回転量を示す信号と、警報指示器208および方向指示器207が操作されたことを示す信号と、を受信する。また、車両制御装置200は、車載カメラ209が撮像した画像情報を車載カメラ209から受信する。
【0040】
ECU201(Engine Control Unit)は、エンジンの動作に関する所定の制御を行う。ECU201は、例えば、エンジンの始動指示を受け付けると、セルモータの回転によりエンジンを始動させる。また、ECU201は、アクセルペダル202が踏み込まれたことを検出し、かかるペダル202の踏み込み量に応じてエンジンの回転数を制御する。また、ECU201は、車両に搭載されている車速センサ(図示せず)から受信した車速信号を車両制御装置200に出力する。また、ECU201は、アクセルペダル202が踏み込まれたことを検出すると、その旨を示す信号を生成して車両制御装置200に出力する。
【0041】
ブレーキ制御部203は、タイヤのブレーキに関する所定の制御を行う。ブレーキ制御部203は、例えば、ブレーキペダル204が踏み込まれたことを検出し、アンダーステアにならないように後輪のブレーキ力を強めるなどの制御を行う。また、ブレーキ制御部203は、ブレーキペダル204が踏み込まれたことを検出すると、その旨を示す信号を生成して車両制御装置200に出力する。
【0042】
ハンドル制御部205は、ハンドル206、方向指示器207、警報指示器208が操作されたことを検出して所定の制御を行う。具体的には、ハンドル制御部205は、ハンドル206の回転量を検出し、かかる回転量から舵角を算出する。また、ハンドル制御部205は、算出した舵角に関する情報を車両制御装置200に出力する。また、ハンドル制御部205は、方向指示器207への操作を検出すると、操作方向のウィンカを点滅させる制御を行う。また、ハンドル制御部205は、方向指示器207への操作が行われた旨を示す信号を生成して車両制御装置200に出力する。また、ハンドル制御部205は、警報指示器208が押されたことを検出すると、かかる指示器が押されている間、所定の音量で警報を出力し続ける。また、ハンドル制御部205は、警報指示器208が押された旨を示す信号を生成して車両制御装置200に出力する。
【0043】
車載カメラ209は、図5に示すように、車両の所定位置に設置され、車両周囲の被写体を撮像し、画像情報を生成する。具体的には、車載カメラ209は、車載カメラO、P、Q、Rがあり、各々、車両前方、車両右側、車両左側、車両後方の撮像エリアo、p、q、rを撮像できる車両の所定位置に設置される。なお、撮像エリアo、p、q、rは、例えば、所定の画角で車両から3mの範囲が設定されているものとする。
【0044】
また、車載カメラO、P、Q、Rの各々は、判定装置100の演算処理装置1との間で同期を取り、例えば、プローブデータ400が生成される時間間隔(例えば、1秒間)で所定数のコマ数(例えば、5コマ)が含まれる画像情報を生成する。なお、車載カメラ209には、例えば、CCD(Charge−Coupled Device)やCMOS(Complementary Metal Oxide Semiconductor)イメージセンサなどの撮像素子が用いられる。車載カメラ209は、生成した画像情報を車両制御装置200に出力する。
【0045】
次に、本実施形態に係る判定装置100の機能ブロックについて説明する。なお、判定装置100の機能ブロックは、演算処理装置1に実装されるCPU2が読み込んだ所定のプログラムを実行することにより構築される。そのため、ROM4には、各機能部の処理を実行するためのプログラムが記憶されている。
【0046】
また、判定装置100の機能ブロックは、本実施形態において実現される判定装置100の機能を理解容易にするために、主な処理内容に応じて分類したものである。また、各機能の分類の仕方やその名称によって、本発明が制限されることはない。なお、判定装置100の各構成は、処理内容に応じて、さらに多くの構成要素に分類することもできる。また、一つの構成要素がさらに多くの処理を実行するように分類することもできる。
【0047】
また、判定装置100の機能部は、ハードウェア(ASICなど)により構築されてもよい。また、各機能部の処理が一つのハードウェアで実行されてもよいし、複数のハードウェアで実行されてもよい。
【0048】
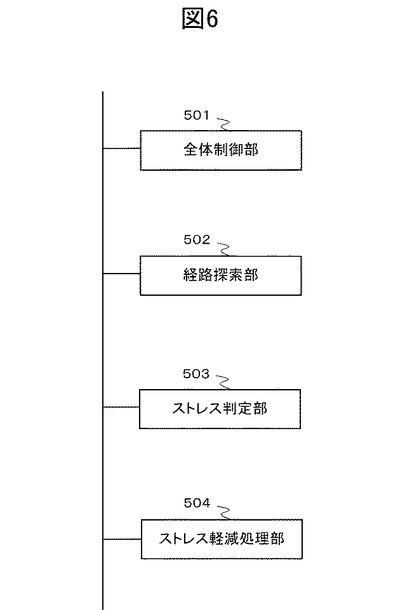
図6は、判定装置100の機能ブロックを示した図である。判定装置100は、全体制御部501と、経路探索部502と、ストレス判定部503と、ストレス軽減処理部504と、を有している。
【0049】
全体制御部501は、判定装置100の様々な処理を行う中心的な機能部である。全体制御部501は、他の機能部、判定装置100が内蔵する他の装置、センサ、並びに、外部装置から所定の情報や指示を受け付ける。また、全体制御部501は、取得した情報や受け付けた指示を、これらの情報や指示の種類または内容に応じて、所定のセンサ、装置、機能部に出力する。
【0050】
経路探索部502は、GPS受信装置23、車速センサ21、ジャイロセンサ22から出力される所定の情報を用いて、車両の現在地を示す座標情報を特定する。また、経路探索部502は、現在地または指定された出発地から、ユーザの設定する目的地まで、を結ぶ経路を探索する機能部である。例えば、経路探索部502は、ダイクストラ法などを用いて、現在地またはユーザから受け付けた出発地と目的地とを結ぶ最小コストの推奨経路を探索する。また、経路探索部502は、探索した推奨経路に関する情報を全体制御部501に出力する。
【0051】
ストレス判定部503は、ユーザがストレス状況にあるか否かを判定する機能部である。具体的には、ストレス判定部503は、画像情報を用いたストレス判定と、プローブデータ400を用いたストレス判定と、を行う。
【0052】
ストレス軽減処理部504は、ユーザによって予め設定されている所定のストレス軽減処理を行う機能部である。例えば、ストレス軽減処理部は、ROM装置20に収容されているCD−ROMを再生したり、FM多重放送受信装置24で受信したFM放送番組をスピーカ15から出力する。
【0053】
[動作の説明]次に、判定装置100で実行されるストレス判定処理について説明する。本実施形態に係るストレス判定処理は、画像情報を用いて行われるストレス判定処理A、Bと、プローブデータ400を用いて行われるストレス判定処理Cと、がある。なお、判定装置100は、ストレス判定処理A〜Cの各々を並行して実行する。
【0054】
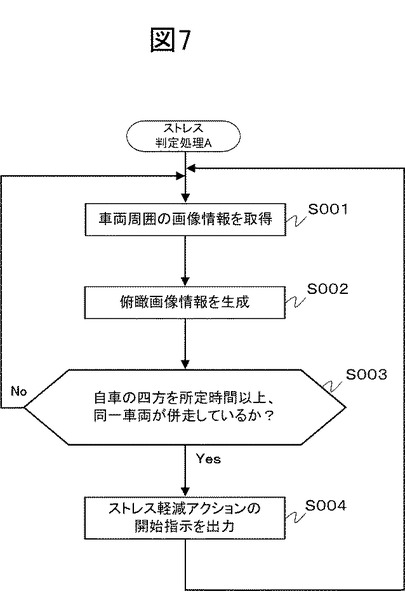
図7は、ストレス判定処理Aのフロー図である。ストレス判定処理Aは、自車の四方を同一の車両が所定時間以上併走している、という状況がユーザにストレスを感じさせる要因と考えられるため、かかる状況であるか否かを判定するために行われる処理である。なお、ストレス判定処理Aは、判定装置100の起動とともに開始される。
【0055】
判定装置100が起動されると、ストレス判定部503は、各車載カメラO、P、Q、Rで生成された車両周囲の画像情報を所定のタイミング(例えば、1秒ごと)で車両制御装置200から取得する(ステップS001)。
【0056】
画像情報を取得すると(ステップS001)、ストレス判定部503は、俯瞰画像情報を生成する(ステップS002)。具体的には、ストレス判定部503は、車両周囲の撮像エリアo、p、q、rの画像情報を用いて俯瞰画像を生成する。なお、俯瞰画像は、各車載カメラ209で撮像された画像の視点を変換することにより生成される。このような視点の変換は、例えば、視点変換前後の画素の配置を定義した変換式などを用いて、各画像の画素を再配置することにより俯瞰画像を生成する周知技術が用いられればよい。なお、変換式などは、例えば、記憶装置に予め格納されていればよい。
【0057】
俯瞰画像が生成されると(ステップS002)、ストレス判定部503は、自車周囲の四方を同一の車両が所定時間以上(例えば、3分以上)併走しているか否かを判定する(ステップS003)。具体的には、ストレス判定部503は、各撮像エリアの車両の特徴点を俯瞰画像を用いて特定し、かかる特徴点が各撮像エリア内に所定時間以上(例えば、3分以上)含まれているか否かを追跡することにより、各撮像エリアごとに、同一の車両が併走しているか否かを判定する。
【0058】
自車の四方に設定されている撮像エリアo、p、q、rの各々について、同一の車両が所定時間以上併走していると判定すると(ステップS003でYes)、ストレス判定部503は、所定のストレス軽減アクションを実行するための指示を生成し、ストレス軽減処理部に出力して(ステップS004)、処理をステップS001に戻す。
【0059】
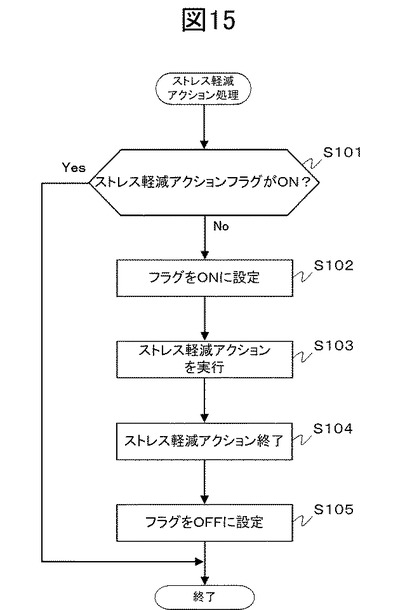
ここで、図15は、ストレス軽減アクションの処理を示したフロー図である。ストレス軽減処理部504は、ストレス軽減アクションの実行指示を受け付けると、かかる処理を開始する。
【0060】
ストレス軽減処理部504は、かかる指示を受け付けると、ストレス軽減アクションフラグがONであるか否かを判定する(ステップS101)。なお、ストレス軽減アクションフラグは、ストレス軽減アクションが実行される際、ONに設定される。また、ストレス軽減処理部504は、ストレス軽減アクションを終了すると、かかるフラグをOFFに設定する。
【0061】
判定の結果、フラグがONである場合(ステップS101でYes)、ストレス軽減処理部504は、ストレス軽減アクション処理を終了する。すなわち、ストレス軽減処理部504は、ストレス軽減アクションを実行しない。これは、ストレス軽減アクションを重複して実行しないようにするためである。
【0062】
一方で、フラグがOFFである場合(ステップS101でNo)、ストレス軽減処理部504は、フラグをONに設定し(ステップS102)、所定のストレス軽減アクションを実行する(ステップS103)。ストレス軽減アクションは、ユーザによって予め設定されていればよい。例えば、ストレス軽減処理部504は、ユーザの設定に応じて、ROM装置20に収容されているCD−ROMを再生する。例えば、ROM装置20に音楽CDが収容されている場合、所定の音楽がスピーカから出力されることによりユーザのストレスが軽減されることになる。
【0063】
また、ストレス軽減処理部504は、ユーザの設定に応じて、FM多重放送受信装置24で受信されたFM放送番組をスピーカから出力する。なお、ストレス軽減アクションは、このような処理に限られず、例えば、ユーザの設定に応じて、ドアウィンドウを開ける処理が実行されてもよい。車内に外気が取り入れられることで、ユーザのストレスが軽減されることになる。
【0064】
ストレス軽減処理部504は、所定時間(例えば、5分間)ストレス軽減アクションを実行した後、かかるアクションを終了し(ステップS104)、フラグをOFFに設定して(ステップS105)、ストレス軽減アクション処理を終了する。
【0065】
なお、後述のストレス判定処理B、Cにおいて、ストレス軽減アクションの開始指示を受信した場合でも、ストレス軽減処理部504は前述と同様のストレス軽減アクション処理を実行する。したがって、ストレス判定処理B、Cの説明では、ストレス軽減処理部504で実行されるストレス軽減アクション処理の説明を省略する。
【0066】
次に、ストレス判定処理Bについて説明する。図8は、ストレス判定処理Bを示したフロー図である。ストレス判定処理Bは、飛び出し注意や落石注意などの警戒標識がある道路を走行する、という状況が、より注意して運転する必要がある、というストレスをユーザに感じさせるため、かかる状況であるか否かを判定するために行われる。なお、ストレス判定処理Bは、判定装置100の起動とともに開始される。
【0067】
判定装置100が起動されると、ストレス判定部503は、車載カメラoにより車両前方の撮像エリアoを撮像した画像情報を車両制御装置200から取得する(ステップS011)。
【0068】
画像情報を取得すると(ステップS011)、ストレス判定部503は、警戒標識を検出したか否かを判定する(ステップS012)。具体的には、ストレス判定部503は、取得した画像情報に警戒標識が写っているか否かにより判定処理を行う。なお、警戒標識が画像に写っているか否かの判定は、例えば、記憶装置内に予め格納されている警戒標識情報を用いたパターンマッチング処理といった従来技術を用いて検出されればよい。
【0069】
判定の結果、取得した画像情報から警戒標識が検出されると(ステップS012でYes)、ストレス判定部503は、ストレス軽減アクションの開始指示を出力する(ステップS013)。一方で、取得した画像情報から警戒標識を検出しない場合(ステップS012でNo)、ストレス判定部503は、処理をステップS011に戻す。
【0070】
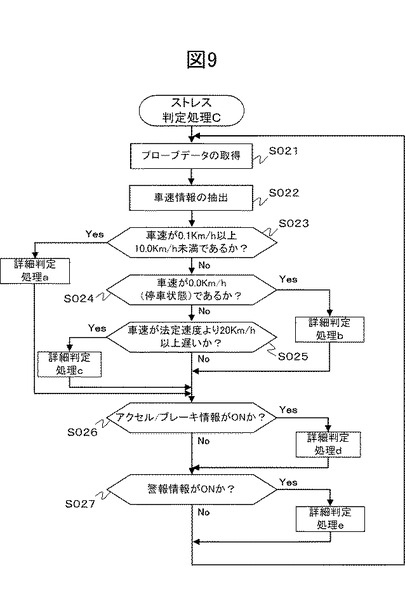
次に、プローブデータ400を用いて行うストレス判定処理Cについて説明する。図9は、かかる処理を示したフロー図である。ストレス判定処理Cは、判定装置100の起動とともに開始される。
【0071】
判定装置100が起動されると、ストレス判定部503は、プローブデータ400を車両制御装置200から取得する(ステップS021)。具体的には、ストレス判定部503は、最新の時刻が格納されているプローブデータ400のレコードを記憶装置11から取得する。
【0072】
プローブデータ400を取得すると(ステップS021)、ストレス判定部503は、プローブデータ400の車速フィールド402から車速を抽出する(ステップS022)。そして、ストレス判定部503は、抽出した車速が0.1km/h以上10.0km/h未満であるか否かを判定する(ステップS023)。
【0073】
判定の結果、抽出した車速が上記の速度範囲に含まれている場合(ステップS023でYes)、ストレス判定部は、詳細判定処理aに移行する。一方で、車速がかかる範囲内に含まれていない場合(ステップS023でNo)、ストレス判定部503は、処理をステップS024に移行する。
【0074】
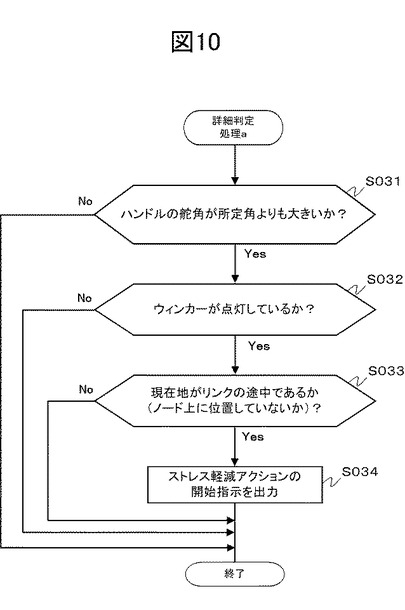
ここで、詳細判定処理aについて説明する。図10は、詳細判定処理aを示したフロー図である。図示するように、ストレス判定部503は、ハンドル206の舵角フィールド407に格納される舵角が所定角(例えば、45°)よりも大きいか否かを判定する(ステップS031)。なお、判定に用いられる所定角を示す情報は、予め記憶装置11などの記録媒体に格納されていればよい。
【0075】
判定の結果、抽出した舵角が所定角よりも大きい場合(ステップS031でYes)、ストレス判定部503は、処理をステップS032に移行する。一方で、舵角が所定角よりも小さい場合、ストレス判定部503は、詳細判定処理aを終了し、処理をステップS026(図9)に移行する。
【0076】
舵角が所定角よりも大きい場合(ステップS031でYes)、ストレス判定部503は、ユーザが方向指示器207を点灯させたか否かを判定する(ステップS032)。具体的には、ストレス判定部503は、プローブデータ400のウィンカフィールド406に格納されている情報が「ON」であるか否かを判定する。
【0077】
判定の結果、ウィンカフィールド406の情報が「ON」である場合、すなわち、自車のウィンカが点灯している場合(ステップS032でYes)、ストレス判定部503は、処理をステップS033に移行する。一方で、ウィンカフィールド406の情報が「OFF」である場合、すなわち、自車のウィンカが点灯していない場合(ステップS032でNo)、ストレス判定部503は、詳細判定処理aを終了し、処理をステップS026(図9)に移行する。
【0078】
ウィンカが点灯されている場合(ステップS032でYes)、ストレス判定部503は、現在地がリンクの途中であるか否か、すなわち、現在地がノード(交差点)上に位置していないか、を判定する(ステップS033)。具体的には、ストレス判定部503は、経路探索部502で特定された現在地を示す座標情報と、現在地周辺にあるノードの座標情報と、の距離を比較し、両者が所定距離(例えば、50m)よりも離れているか否かを判定する。
【0079】
判定の結果、現在地と現在地周辺のノードとが所定の距離以上(例えば、50m)離れている場合、ストレス判定部503は、現在地がリンクの途中にあると判定し(ステップS033でYes)、ストレス軽減アクションの開始指示を出力する(ステップS034)。一方で、両者が所定の距離以上離れていない場合、ストレス判定部503は、詳細判定処理aを終了し、処理をステップS026(図9)に移行する。
【0080】
このようなストレス判定処理aは、例えば、自車前方に停車などしている車両や障害物がある場合、それを迂回する操作がなされたか否かを判定することができる。そして、かかる操作がなされたと判定した場合、ユーザが障害物を回避するというストレスを感じる状況にあると考えられるため、所定のストレス軽減アクションを実行することにより、ユーザのストレスを軽減させることができる。
【0081】
図9のフロー図に戻って説明を続ける。プローブデータ400の車速フィールド402に格納されている車速が0.1km/h以上10.0km/h未満でない場合(ステップS023でNo)、ストレス判定部503は、車速が0.0km/h(停車状態)であるか否かを判定する。
【0082】
判定の結果、車速が0.0km/hである場合、ストレス判定部503は、詳細判定処理bに移行する。一方で、車速が0.0km/hでない場合、ストレス判定部503は、処理をステップS025に移行する。
【0083】
ここで、詳細判定処理bについて説明する。図11は詳細判定処理bを示したフロー図である。図示するように、ストレス判定部503は、現在地がノードから所定の距離以内(例えば、50m以内)にあるか否かを判定する(ステップS041)。具体的には、ストレス判定部503は、経路探索部502で特定された現在地を示す座標情報を用いて、現在地周辺のノードとの間の距離が所定の距離以内であるか否かを判定する。
【0084】
判定の結果、現在地がノードから所定の距離以内である場合(ステップS041でYes)、ストレス判定部503は、処理をステップS042に移行する。一方で、現在地とノードとの距離が所定の距離よりも離れている場合(ステップS041でNo)、ストレス判定部503は、処理をステップS043に移行する。
【0085】
現在地が現在地周辺のノードから所定の距離以内である場合(ステップS041でYes)、ストレス判定部503は、画像情報から青信号を検出したか否かを判定する(ステップS042)。具体的には、ストレス判定部503は、プローブデータ400を取得したタイミングで生成された画像情報であって、車両前方の撮像エリアoを撮像した画像情報を車両制御装置200から取得する。
【0086】
また、ストレス判定部503は、取得した画像情報に、青色かつ所定以上の大きさの円状の被写体を特定するための処理を行う。なお、被写体の特定は、例えば、輝度差や色彩などを認識して対象物を特定する従来技術が用いられればよい。そして、画像情報から青信号を検出した場合(ステップS042でYes)、ストレス判定部503は、処理をステップS043に移行する。一方で、画像情報から青信号を検出しない場合(ステップS042でNo)、ストレス判定部503は、詳細判定処理bを終了し、処理をステップS026(図9)に移行する。
【0087】
ステップS043では、ストレス判定部503は、前方車両の方向指示器207が点灯しているか否かを判定する。具体的には、ストレス判定部503は、青信号の検出と同様に、車両前方の撮像エリアoを撮像した画像情報を車両制御装置200から取得し、かかる画像情報を解析する。そして、画像情報から前方車両の方向指示器207が点灯していることを検出すると(ステップS043でYes)、ストレス判定部503は、ストレス軽減アクションの開始指示を出力する(ステップS044)。一方で、前方車両の方向指示器207が点灯していることを検出しない場合(ステップS043でNo)、ストレス判定部503は、詳細判定処理bを終了し、処理をステップS026(図9)に移行する。
【0088】
このようなストレス判定処理bは、例えば、交差点や信号機の無い場所で、前方車両が右折するために停車しているか否かを判定することができる。そして、右折のための停車であると判定した場合、ユーザが右折待ちをするというストレスを感じる状況にあると考えられるため、所定のストレス軽減アクションを実行することにより、ユーザのストレスを軽減させることができる。
【0089】
再び、図9のフロー図に戻って説明を続ける。プローブデータ400の車速フィールド402に格納されている車速が0.0km/hでない場合(ステップS024でNo)、ストレス判定部503は、制限速度よりも20km/h以上下回った車速が車速フィールド402に格納されているか否かを判定する。なお、現在地のあるリンクの制限速度が30km/h以下である場合、ストレス判定部503は、車速フィールド402の車速が制限速度の30%〜50%の範囲に含まれる速度であるか否かを判定する。
【0090】
判定の結果、車速が制限速度よりも20km/h以上下回った速度である場合、または、制限速度が30km/h以下である時に制限速度の30%〜50%の範囲に含まれる速度である場合(ステップS025でYes)、ストレス判定部503は、詳細判定処理cに移行する。一方で、これらに該当しない場合(ステップS025でNo)、ストレス判定部503は、処理をステップS026に移行する。
【0091】
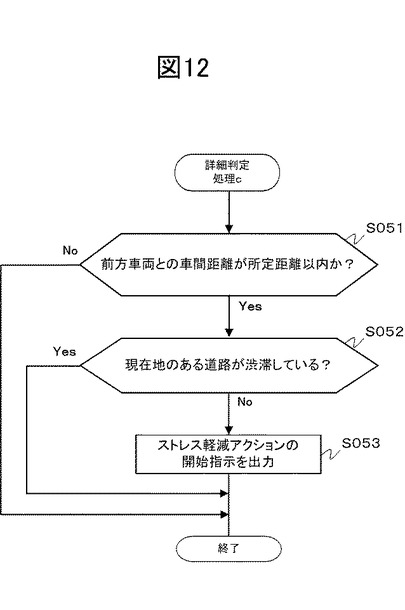
ここで、詳細判定処理cについて説明する。図12は詳細判定処理cを示したフロー図である。図示するように、ストレス判定部503は、前方車両との距離が所定の距離以内(例えば、3m以内)であるか否かを判定する(ステップS051)。具体的には、ストレス判定部503は、撮像エリアoを撮像した画像情報を用いて、自車と前方車両との車間距離を算出し、その距離を判定する。なお、車間距離は、焦点距離の調整、被写体同士の輝度差、トーンの違いなどから算出する従来技術が用いられればよい。
【0092】
判定の結果、前方車両との車間距離が所定の距離以内(例えば、3m)である場合(ステップS051でYes)、ストレス判定部503は、処理をステップS052に移行する。一方で、自車と前方車両との車間距離が所定の距離以上離れている場合、ストレス判定部503は、詳細判定処理cを終了し、処理をステップS026(図9)に移行する。
【0093】
車間距離が所定の距離以内である場合(ステップS051でYes)、ストレス判定部503は、現在地のある道路が渋滞道路であるか否かを判定する(ステップS052)。具体的には、ストレス判定部503は、現在地を示す座標情報を経路探索部から取得し、かかる座標情報から現在地のあるリンクを特定する。そして、ストレス判定部503は、現在地のある道路に渋滞が生じているか否かをVICS情報から特定する。
【0094】
判定の結果、現在地のある道路が渋滞していない場合(ステップS052でNo)、ストレス判定部503は、ストレス軽減アクションの開始指示を出力する。一方で、渋滞している場合(ステップS052でYes)、ストレス判定部503は、詳細判定処理cを終了し、処理をステップS026(図9)に移行する。
【0095】
このようなストレス判定処理cは、低速走行の要因が、前方走行車両であるか否かを判定することができる。そして、低速走行の要因が、前方走行車両であると判定した場合、ユーザが低速走行にストレスを感じる状況にあると考えられるため、所定のストレス軽減アクションを実行することにより、ユーザのストレスを軽減させることができる。このような例は、バス車両や初心者マークを付けた車両の後方を走行する場合などが考えられる。
【0096】
再び、図9のフロー図に戻って説明を続ける。ストレス判定部503は、プローブデータ400のアクセルフィールド403またはブレーキフィールド404に格納されている情報が「ON」であるか否かを判定する(ステップS026)。そして、いずれかのフィールドに格納されている情報が「ON」である場合、ストレス判定部は、詳細判定処理dに処理を移行する。一方で、アクセルフィールド403およびブレーキフィールド404の両者に格納される情報が「OFF」である場合、ストレス判定部503は、処理をステップS027に移行する。
【0097】
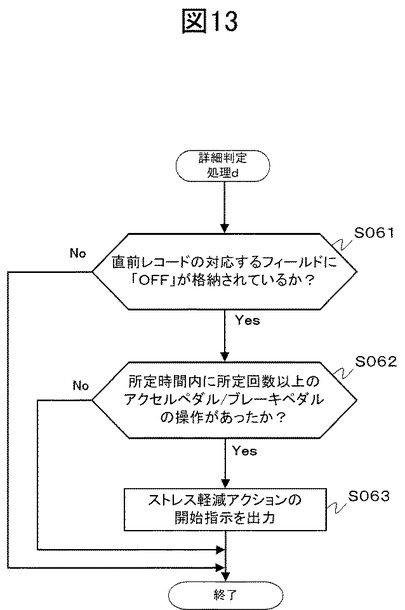
ここで、詳細判定処理dについて説明する。図13は、詳細判定処理dを示したフロー図である。前述のステップS026において、アクセルフィールド403の情報が「ON」であると判定した場合、ストレス判定部は、かかるフィールドを有するレコードの直前レコードのアクセルフィールド403に「OFF」が格納されているか否かを判定する(ステップS061)。また、前述のステップS026において、ブレーキフィールド404の情報が「ON」であると判定した場合も同様に、ストレス判定部503は、かかるフィールドを有するレコードの直前レコードのブレーキフィールド404に「OFF」が格納されているか否かを判定する(ステップS061)。
【0098】
アクセルペダル202、ブレーキペダル204が踏み続けられている間に生成されたレコードのアクセルフィールド403、ブレーキフィールド404には、連続して「ON」が格納され続ける。したがって、ストレス判定部503は、アクセルペダル202またはブレーキペダル204が単発的に踏まれたことを判別するため、直前レコードの対応するフィールドに「OFF」が格納されているかを判定する。
【0099】
直前レコードのアクセルフィールド403またはブレーキフィールド404に「OFF」が格納されている場合(ステップS061でYes)、ストレス判定部503は、処理をステップS062に移行する。一方で、直前レコードのアクセルフィールド403またはブレーキフィールド404に「ON」が格納されている場合(ステップS061でNo)、ストレス判定部503は、詳細判定処理dを終了し、処理をステップS027(図9)に移行する。
【0100】
ステップS062において、ストレス判定部503は、所定時間内(例えば、60秒以内)にアクセルペダル202操作およびブレーキペダル操作が所定数回数以上(例えば、アクセルペダル202操作およびブレーキペダル操作が各々10回ずつ)行われたか否かを判定する。具体的には、ストレス判定部503は、プローブデータ400の最新レコードおよび最新レコードよりも古い所定数のレコード(例えば、60個分のレコード)のアクセルフィールド403、ブレーキフィールド404を参照し、所定時間以内(例えば、60秒以内)になされたペダル操作の回数を算出する。
【0101】
なお、ストレス判定部503は、「ON」が格納されているレコードの直前レコードの対応するフィールドに「OFF」が格納されている場合のみ、ペダル操作回数を1つ加算する。すわなち、ストレス判定部503は、継続的にペダルが踏み込まれていた場合に連続して各レコードに格納される「ON」は、始めの「ON」すなわち直前レコードに「OFF」が格納されているものを1回として加算する。
【0102】
判定の結果、アクセルペダル202およびブレーキペダルが所定時間内(例えば、60秒以内)に所定回数以上(例えば、アクセルペダル202操作およびブレーキペダル操作が各々10回ずつ)操作されている場合(ステップS062でYes)、ストレス判定部503は、ストレス軽減アクションの開始指示を出力する(ステップS063)。一方で、両ペダル操作の合計が所定時間内に所定回数以上さていない場合(ステップS062でNo)、ストレス判定部503は、詳細判定処理dを終了し、処理をステップS027(図9)に移行する。
【0103】
このようなストレス判定処理dは、ユーザがアクセルペダルおよびブレーキペダルを短時間に多数回踏み換えているか否かを判定することができる。そして、多数踏み換えている場合、ユーザが前方の走行車両にストレスを感じる状況にあると考えられるため、所定のストレス軽減アクションを実行することにより、ユーザのストレスを軽減させることができる。このような例は、バス車両や初心者マークを付けた車両の後方を走行する場合などが考えられる。
【0104】
再び、図9に戻って説明を続ける。ステップS027において、ストレス判定部503は、警報フィールド405に「ON」が格納されているか否かを判定する。判定の結果、「ON」が格納されている場合、ストレス判定部503は、詳細判定処理eに移行する。一方で、警報フィールド405に「OFF」が格納されている場合、ストレス判定部503は、処理をステップS021に移行する。
【0105】
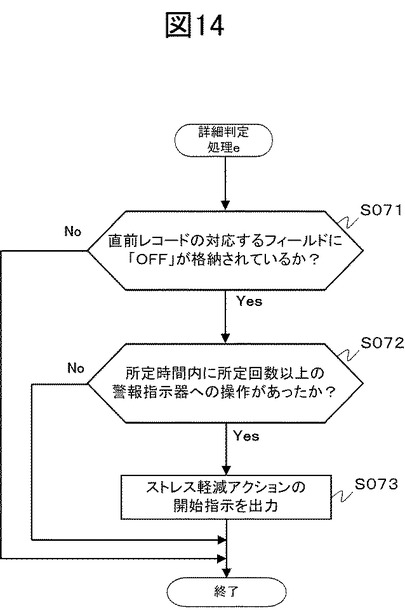
ここで、詳細判定処理eについて説明する。図14は、詳細判定処理eを示したフロー図である。前述のステップS027(図9)において、警報フィールド405の情報が「ON」であると判定した場合、ストレス判定部503は、かかるフィールドを有するレコードの直前レコードの警報フィールド405に「OFF」が格納されているか否かを判定する。
【0106】
警報指示器208が押し続けられている間に生成されたレコードの警報フィールド405には、連続して「ON」が格納され続ける。したがって、警報指示器208が単発的に押されたことを判別するため、ストレス判定部503は、直前レコードの対応するフィールドに「OFF」が格納されているかを判定する。
【0107】
直前レコードの警報フィールド405に「OFF」が格納されている場合(ステップS071でYes)、ストレス判定部503は、処理をステップS072に移行する。一方で、直前レコードの警報フィールド405に「ON」が格納されている場合(ステップS071でNo)、ストレス判定部503は、詳細判定処理eを終了し、処理をステップS021(図9)に移行する。
【0108】
ステップS072において、ストレス判定部503は、所定時間以内(例えば、60秒以内)に警報指示器208が所定回数以上(例えば、10回以上)押されたか否かを判定する。具体的には、ストレス判定部503は、プローブデータ400の最新レコードおよび最新レコードよりも古い所定数のレコード(例えば、60個分のレコード)の警報フィールド405から所定時間以内(例えば、60秒内)になされた警報指示器の操作回数を算出する。
【0109】
なお、ストレス判定部503は、「ON」が格納されているレコードの直前レコードの対応するフィールドに「OFF」が格納されている場合のみ、警報指示器の操作回数を1つ加算する。すわなち、ストレス判定部503は、継続的に警報指示器208が押されていた場合に連続して各レコードに格納される「ON」は、始めの「ON」すなわち直前レコードに「OFF」が格納されているものを1回として加算する。
【0110】
判定の結果、警報指示器208が所定時間以内(例えば、60秒以内)に所定回数以上(例えば、10回以上)操作されている場合(ステップS072でYes)、ストレス判定部503は、ストレス軽減アクションの開始指示を出力する(ステップS073)。一方で、警報指示器208の操作が所定時間以内に所定回数以上なされていない場合(ステップS072でNo)、ストレス判定部503は、詳細判定処理eを終了し、処理をステップS021(図9)に移行する。
【0111】
このようなストレス判定処理eは、ユーザが警報指示器を短時間に多数回押しているか否かを判定することができる。そして、多数回押している場合、ユーザが前方の走行車両にストレスを感じる状況にあると考えられるため、所定のストレス軽減アクションを実行することにより、ユーザのストレスを軽減させることができる。このような例は、運転に不慣れな車両や、交通ルールを守らない車両の後方を走行する場合などが考えられる。
【0112】
このような本実施形態に係る発明によれば、ユーザがストレスを感じる状況にあるか否かをより適切に判定することができる。
【0113】
なお、前述の実施形態では、判定処理A、B、詳細判定処理a〜eの何れかで所定の条件が満たされる場合に所定のストレス軽減アクションを実行したが、本発明は本実施形態に限られるものではない。例えば、本実施形態の変形例として、複数の判定処理において所定の条件が満たされる場合のみ、所定のストレス軽減アクションが実行される。例えば、判定処理A、B、詳細判定処理a〜eのうち、3つ以上の判定処理でユーザがストレスを感じる状況にあると判定された場合のみ、所定のストレス軽減アクションが実行される。
【0114】
このような変形例に係る発明によれば、ユーザがストレスを感じる状況にあるか否かをより適切に判定することができる。特に、複数の判定処理でストレスを感じる状況であると判定されなければストレス軽減アクションが実行されないため、頻繁にストレス軽減アクションが実行されてしまうことを回避することができる。
【0115】
なお、前述の実施形態では、判定装置を車載ナビゲーション装置として実現したが、本発明はかかる実施形態に限られるものではない。例えば、判定装置を船舶に搭載し、所定の判定を行うことによりユーザがストレスを感じる状況にあるか否かを判定するようにしてもよい。その際、海上における交通ルールなどを適用させてユーザがストレスを感じる状況にあるか否かを判定するようにする。
【符号の説明】
【0116】
100・・・判定装置、1・・・演算処理装置、
10・・・ディスプレイ、11・・・記憶装置、
13・・・音声入出力装置、16・・・入力装置、
20・・・ROM装置、21・・・車速センサ、
22・・・ジャイロセンサ、23・・・GPS受信装置、
24・・・FM多重放送受信装置、25・・・ビーコン受信装置
【技術分野】
【0001】
本発明は、判定装置に関する。
【背景技術】
【0002】
特許文献1には、ユーザの疲労を考慮して所定の音声ガイダンスを出力する車載用ナビゲーション装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2011−75395号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記文献に記載の車載用ナビゲーション装置は、運転距離や運転時間に応じて所定の音声ガイダンスを出力する。しかしながら、このような従来技術では、運転中のユーザがストレスを感じる状況にあるか否かを判定することはできない。
【0005】
そこで、本発明は、ストレスを感じる状況にあるか否かをより適切に判定することができる判定装置の提供を目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するため、本発明に係る判定装置は、所定の情報を取得する取得手段と、取得した前記情報を用いて、ユーザがストレスを感じる状況にあるか否かを判定する判定手段と、前記判定手段で、ストレスを感じる状況であると判定された場合、所定のストレス軽減アクションを実行する実行手段と、を備える。
【発明の効果】
【0007】
本発明に係る判定装置によれば、ユーザがストレスを感じる状況にあるか否かをより適切に判定することができる。
【図面の簡単な説明】
【0008】
【図1】本発明の一実施形態の概略構成を示す図である。
【図2】本発明の一実施形態に係る判定装置の概略構成を示す図である。
【図3】本発明の一実施形態に係る領域情報を示す図である。
【図4】本発明の一実施形態に係るプローブデータを示す図である。
【図5】本発明の一実施形態に係る車載カメラの撮像エリアを示す図である。
【図6】本発明の一実施形態に係る判定装置の機能ブロックを示す図である。
【図7】本発明の一実施形態に係るストレス判定処理Aのフローを示す図である。
【図8】本発明の一実施形態に係るストレス判定処理Bのフローを示す図である。
【図9】本発明の一実施形態に係るストレス判定処理Cのフローを示す図である。
【図10】本発明の一実施形態に係る詳細判定処理aのフローを示す図である。
【図11】本発明の一実施形態に係る詳細判定処理bのフローを示す図である。
【図12】本発明の一実施形態に係る詳細判定処理cのフローを示す図である。
【図13】本発明の一実施形態に係る詳細判定処理dのフローを示す図である。
【図14】本発明の一実施形態に係る詳細判定処理eのフローを示す図である。
【図15】本発明の一実施形態に係るストレス軽減アクション処理のフローを示す図である。
【発明を実施するための形態】
【0009】
以下、本発明の一実施形態に係る判定装置について説明する。
【0010】
図1は、本実施形態の概略構成を示した図である。図示するように、本実施形態に係る判定装置100は、車両制御装置200に接続され、運転中のユーザがストレスを感じる状況にあるか否かを判定する。
【0011】
図2は、判定装置100の概略構成を示した図である。ここで、判定装置100は、推奨経路の探索や交通情報の表示といった、いわゆるナビゲーション機能を有するナビゲーション装置によって実現することができる。
【0012】
判定装置100は、演算処理装置1と、ディスプレイ10と、記憶装置11と、音声入出力装置13と、入力装置16と、ROM装置20と、車速センサ21と、ジャイロセンサ22と、GPS受信装置23と、FM多重放送受信装置24と、ビーコン受信装置25と、を備えている。また、これらの各装置やセンサは、バス6によって相互に接続され、データの受け渡しが可能な構成となっている。
【0013】
演算処理装置1は、判定装置100の様々な処理を行う中心的なユニットである。演算処理装置1は、例えば、車速センサ21、ジャイロセンサ22といった各種センサや、GPS受信装置23などから出力される情報を用いて、ユーザの現在地を特定する。
【0014】
また、演算処理装置1は、記憶装置11に格納されている地図情報12を用いて、出発地および目的地を結ぶ推奨経路を探索する。
【0015】
また、演算処理装置1は、地図情報12、交通情報、誘導経路情報などをグラフィックス変換し、ディスプレイ10に出力する。
【0016】
また、演算処理装置1は、経路誘導を行うための音声情報を生成し、これをスピーカ15に出力する。
【0017】
また、演算処理装置1は、車両制御装置200から取得した所定の情報を用いて、所定のタイミング(例えば、1秒ごと)でプローブデータを生成する。なお、プローブデータの詳細は後述する。
【0018】
また、演算処理装置1は、車載カメラで撮像された画像情報を解析し、所定の被写体が写っているか否かを判定する。
【0019】
なお、演算処理装置1は、数値演算、各装置およびセンサの制御など、様々な処理を実行するCPU2(Central Processing Unit)と、プログラムやデータ、演算結果などを一時的に格納するRAM3と、プログラムやデータなどを格納するROM4(Read Only Memory)と、各種ハードウェアを演算処理装置と接続するためのI/F(インターフェース)5と、を有している。また、CPU2、RAM3、ROM4は、バス6によって相互に接続されている。
【0020】
ディスプレイ10は、演算処理装置1により生成されたグラフィックス情報を表示領域に表示させるユニットである。ディスプレイ10は、例えば、液晶ディスプレイ、有機ELディスプレイなどで構成される。
【0021】
記憶装置11は、例えば、HDD(Hard Disk Drive)や不揮発性メモリカードといった、少なくとも読み書きが可能な記録媒体で構成される。記憶装置11には、例えば、ナビゲーション機能に用いられる地図情報12、交通情報、経路情報、区間情報、辞書情報、などが格納されている。
【0022】
例えば、地図情報12には、地図上の道路に関する情報であるリンク情報などを含む領域情報が格納されている。図3は、領域情報300を示した図である。領域情報300は、地図上の各領域が有するリンク情報303を含んだ情報である。なお、リンクとは、例えば、交差点などの各ノード間を結ぶ道路を意味し、リンク情報303には、かかる道路に関する情報が格納されている。
【0023】
領域情報300は、地図上の領域を識別するメッシュID301ごとに、各メッシュが有する道路のリンクID302と、各リンクID302に対応付けられているリンク情報303と、を有している。また、リンク情報303は、道路の両端を示す開始ノードおよび終了ノードの地点座標304と、一般道、有料道路、国道、県道といった道路の種別を示す道路種別情報305と、道路の名称が格納される道路名称情報306と、道路の長さを示すリンク長情報307と、道路を通過するのに要する時間を示す旅行時間情報308と、道路の開始ノードおよび終了ノードの各々に接続する他の道路のリンクIDが格納されている開始接続リンク/終了接続リンク情報309と、リンクの制限速度が格納されている制限速度情報310と、を有している。
【0024】
また、記憶装置11には、例えば、演算処理装置1によって生成されたプローブデータが格納されている。図4は、プローブデータ400を示した図である。プローブデータ400は、例えば、ハンドルやアクセルペダルなどの車両操作や車速などに関する所定の情報を有している。具体的には、プローブデータ400は、プローブデータ400の生成時刻が格納される時刻フィールド401と、車速が格納される車速フィールド402と、アクセルペダル操作に関する情報が格納されるアクセルフィールド403と、ブレーキペダル操作に関する情報が格納されるブレーキフィールド404と、警報指示器(クラクション)の操作に関する情報が格納される警報フィールド405と、方向指示器の操作に関する情報が格納されるウィンカフィールド406と、ハンドルの回転量に応じた舵角が格納される舵角フィールド407と、からなるレコードを所定数(例えば、最大1000個)有している。なお、蓄積されるレコードが最大数まで達すると、最も古い時刻が格納されているレコードから順に削除される。
【0025】
また、アクセルフィールド403、ブレーキフィールド404、警報フィールド405には、図示するように、「ON」または「OFF」といった情報が格納される。例えば、アクセルペダル、ブレーキペダルが踏み込まれた際に生成されたレコードには、これらのフィールドに「ON」が格納される。また、警報指示器が押された際(警報が鳴らされた際)に生成されたレコードの警報フィールド405には「ON」が格納される。なお、アクセルペダル、ブレーキペダルが踏み込まれている間に生成されたレコードのアクセルフィールド403、ブレーキフィールド404には、各々、「ON」が格納され続けることになる。
【0026】
図2に戻って説明する。音声入出力装置13は、音声入力装置16としてのマイクロフォン14と、音声出力装置としてのスピーカ15と、を備える。マイクロフォン14は、ユーザが発した声など、判定装置100の外部音声を採取する。また、スピーカ15は、演算処理装置1で生成したユーザへのメッセージを音声信号として出力する。
【0027】
入力装置16は、判定装置100がユーザから所定の指示を受け付けるための装置である。具体的には、方向キー17、ダイヤルスイッチ18、タッチパネル19、その他のハードスイッチ(図示しない)である縮尺変更キーなどで構成される。
【0028】
方向キー17は、例えば、上下左右および各斜め方向を示す8つのハードスイッチから構成され、ディスプレイ10に表示されるメニュー項目の選択や、地図画像のスクロール方向を決定する際に用いられる。方向キー17によって示される各方向は、選択するメニュー項目の移動方向や、ディスプレイ10の表示エリアの移動方向を示す。
【0029】
ダイヤルスイッチ18は、時計回り及び反時計回りに回転可能に構成され、所定の角度の回転ごとにパルス信号を発生し、演算処理装置1に出力する。演算処理装置1に入力されたパルス信号の数から、ダイヤルスイッチ18の回転角度が求められる。
【0030】
タッチパネル19は、ディスプレイ10の表示面側に搭載され、表示画面を透視可能である。タッチパネル19は、人の指によるタッチや専用のタッチペンによるタッチを検知する。使用者によるタッチ位置は、例えば、タッチパネル19上に設定されるXY座標に基づき特定される。このようなタッチパネル19は、例えば、静電容量方式による入力検出素子などで構成される。
【0031】
ROM装置20は、CD−ROMやDVD−ROMなどのROM(Read Only Memory)や、IC(Integrated Circuit)カードといった、少なくとも読み取りが可能な記録媒体で構成されている。この記録媒体には、例えば、動画情報、音声情報、音楽情報などが記録されている。
【0032】
車速センサ21、ジャイロセンサ22およびGPS受信装置23は、判定装置100が搭載される車両の現在地を検出するために使用される。
【0033】
車速センサ21は、車速の算出に用いられる情報を出力する。具体的には、車速センサ21は、検出した車輪の回転数をパルス信号に変換し、所定の時間内におけるパルス信号数といった所定の情報を出力する。
【0034】
ジャイロセンサ22は、光ファイバジャイロや振動ジャイロなどで構成され、移動体の回転による角速度を検出する。
【0035】
GPS受信装置23は、GPS衛星からの信号を受信して、車両とGPS衛星間の距離と、距離の変化率を3個以上の衛星に対して測定することで、車両の現在地、進行速度および進行方位を測定する。
【0036】
FM多重放送受信装置24は、FM放送局から送られてくるFM多重放送信号を受信する。FM多重放送には、VICS(Vehicle Information Communication System:格納商標)情報の概略現況交通情報、規制情報、SA/PA(サービスエリア/パーキングエリア)情報、駐車場情報、天気情報などや、FM多重一般情報としてラジオ局が提供する文字情報などがある。
【0037】
ビーコン受信装置25は、VICS情報などの概略現況交通情報、規制情報、SA/PA(サービスエリア/パーキングエリア)情報、駐車場情報、天気情報や緊急警報などを受信する。例えば、光により通信する光ビーコン、電波により通信する電波ビーコンなどの受信装置である。
【0038】
再び図1に戻り、判定装置100に接続されている車両制御装置200および車両の各制御部について説明する。
【0039】
車両制御装置200は、車両の動作などを総合的に制御する制御装置である。具体的には、車両制御装置200は、ECU201およびブレーキ制御部203から、各々、アクセルペダル202およびブレーキペダル204が踏み込まれたことを示す所定の信号を受信する。また、車両制御装置200は、ハンドル制御部205から、ハンドル206の回転量を示す信号と、警報指示器208および方向指示器207が操作されたことを示す信号と、を受信する。また、車両制御装置200は、車載カメラ209が撮像した画像情報を車載カメラ209から受信する。
【0040】
ECU201(Engine Control Unit)は、エンジンの動作に関する所定の制御を行う。ECU201は、例えば、エンジンの始動指示を受け付けると、セルモータの回転によりエンジンを始動させる。また、ECU201は、アクセルペダル202が踏み込まれたことを検出し、かかるペダル202の踏み込み量に応じてエンジンの回転数を制御する。また、ECU201は、車両に搭載されている車速センサ(図示せず)から受信した車速信号を車両制御装置200に出力する。また、ECU201は、アクセルペダル202が踏み込まれたことを検出すると、その旨を示す信号を生成して車両制御装置200に出力する。
【0041】
ブレーキ制御部203は、タイヤのブレーキに関する所定の制御を行う。ブレーキ制御部203は、例えば、ブレーキペダル204が踏み込まれたことを検出し、アンダーステアにならないように後輪のブレーキ力を強めるなどの制御を行う。また、ブレーキ制御部203は、ブレーキペダル204が踏み込まれたことを検出すると、その旨を示す信号を生成して車両制御装置200に出力する。
【0042】
ハンドル制御部205は、ハンドル206、方向指示器207、警報指示器208が操作されたことを検出して所定の制御を行う。具体的には、ハンドル制御部205は、ハンドル206の回転量を検出し、かかる回転量から舵角を算出する。また、ハンドル制御部205は、算出した舵角に関する情報を車両制御装置200に出力する。また、ハンドル制御部205は、方向指示器207への操作を検出すると、操作方向のウィンカを点滅させる制御を行う。また、ハンドル制御部205は、方向指示器207への操作が行われた旨を示す信号を生成して車両制御装置200に出力する。また、ハンドル制御部205は、警報指示器208が押されたことを検出すると、かかる指示器が押されている間、所定の音量で警報を出力し続ける。また、ハンドル制御部205は、警報指示器208が押された旨を示す信号を生成して車両制御装置200に出力する。
【0043】
車載カメラ209は、図5に示すように、車両の所定位置に設置され、車両周囲の被写体を撮像し、画像情報を生成する。具体的には、車載カメラ209は、車載カメラO、P、Q、Rがあり、各々、車両前方、車両右側、車両左側、車両後方の撮像エリアo、p、q、rを撮像できる車両の所定位置に設置される。なお、撮像エリアo、p、q、rは、例えば、所定の画角で車両から3mの範囲が設定されているものとする。
【0044】
また、車載カメラO、P、Q、Rの各々は、判定装置100の演算処理装置1との間で同期を取り、例えば、プローブデータ400が生成される時間間隔(例えば、1秒間)で所定数のコマ数(例えば、5コマ)が含まれる画像情報を生成する。なお、車載カメラ209には、例えば、CCD(Charge−Coupled Device)やCMOS(Complementary Metal Oxide Semiconductor)イメージセンサなどの撮像素子が用いられる。車載カメラ209は、生成した画像情報を車両制御装置200に出力する。
【0045】
次に、本実施形態に係る判定装置100の機能ブロックについて説明する。なお、判定装置100の機能ブロックは、演算処理装置1に実装されるCPU2が読み込んだ所定のプログラムを実行することにより構築される。そのため、ROM4には、各機能部の処理を実行するためのプログラムが記憶されている。
【0046】
また、判定装置100の機能ブロックは、本実施形態において実現される判定装置100の機能を理解容易にするために、主な処理内容に応じて分類したものである。また、各機能の分類の仕方やその名称によって、本発明が制限されることはない。なお、判定装置100の各構成は、処理内容に応じて、さらに多くの構成要素に分類することもできる。また、一つの構成要素がさらに多くの処理を実行するように分類することもできる。
【0047】
また、判定装置100の機能部は、ハードウェア(ASICなど)により構築されてもよい。また、各機能部の処理が一つのハードウェアで実行されてもよいし、複数のハードウェアで実行されてもよい。
【0048】
図6は、判定装置100の機能ブロックを示した図である。判定装置100は、全体制御部501と、経路探索部502と、ストレス判定部503と、ストレス軽減処理部504と、を有している。
【0049】
全体制御部501は、判定装置100の様々な処理を行う中心的な機能部である。全体制御部501は、他の機能部、判定装置100が内蔵する他の装置、センサ、並びに、外部装置から所定の情報や指示を受け付ける。また、全体制御部501は、取得した情報や受け付けた指示を、これらの情報や指示の種類または内容に応じて、所定のセンサ、装置、機能部に出力する。
【0050】
経路探索部502は、GPS受信装置23、車速センサ21、ジャイロセンサ22から出力される所定の情報を用いて、車両の現在地を示す座標情報を特定する。また、経路探索部502は、現在地または指定された出発地から、ユーザの設定する目的地まで、を結ぶ経路を探索する機能部である。例えば、経路探索部502は、ダイクストラ法などを用いて、現在地またはユーザから受け付けた出発地と目的地とを結ぶ最小コストの推奨経路を探索する。また、経路探索部502は、探索した推奨経路に関する情報を全体制御部501に出力する。
【0051】
ストレス判定部503は、ユーザがストレス状況にあるか否かを判定する機能部である。具体的には、ストレス判定部503は、画像情報を用いたストレス判定と、プローブデータ400を用いたストレス判定と、を行う。
【0052】
ストレス軽減処理部504は、ユーザによって予め設定されている所定のストレス軽減処理を行う機能部である。例えば、ストレス軽減処理部は、ROM装置20に収容されているCD−ROMを再生したり、FM多重放送受信装置24で受信したFM放送番組をスピーカ15から出力する。
【0053】
[動作の説明]次に、判定装置100で実行されるストレス判定処理について説明する。本実施形態に係るストレス判定処理は、画像情報を用いて行われるストレス判定処理A、Bと、プローブデータ400を用いて行われるストレス判定処理Cと、がある。なお、判定装置100は、ストレス判定処理A〜Cの各々を並行して実行する。
【0054】
図7は、ストレス判定処理Aのフロー図である。ストレス判定処理Aは、自車の四方を同一の車両が所定時間以上併走している、という状況がユーザにストレスを感じさせる要因と考えられるため、かかる状況であるか否かを判定するために行われる処理である。なお、ストレス判定処理Aは、判定装置100の起動とともに開始される。
【0055】
判定装置100が起動されると、ストレス判定部503は、各車載カメラO、P、Q、Rで生成された車両周囲の画像情報を所定のタイミング(例えば、1秒ごと)で車両制御装置200から取得する(ステップS001)。
【0056】
画像情報を取得すると(ステップS001)、ストレス判定部503は、俯瞰画像情報を生成する(ステップS002)。具体的には、ストレス判定部503は、車両周囲の撮像エリアo、p、q、rの画像情報を用いて俯瞰画像を生成する。なお、俯瞰画像は、各車載カメラ209で撮像された画像の視点を変換することにより生成される。このような視点の変換は、例えば、視点変換前後の画素の配置を定義した変換式などを用いて、各画像の画素を再配置することにより俯瞰画像を生成する周知技術が用いられればよい。なお、変換式などは、例えば、記憶装置に予め格納されていればよい。
【0057】
俯瞰画像が生成されると(ステップS002)、ストレス判定部503は、自車周囲の四方を同一の車両が所定時間以上(例えば、3分以上)併走しているか否かを判定する(ステップS003)。具体的には、ストレス判定部503は、各撮像エリアの車両の特徴点を俯瞰画像を用いて特定し、かかる特徴点が各撮像エリア内に所定時間以上(例えば、3分以上)含まれているか否かを追跡することにより、各撮像エリアごとに、同一の車両が併走しているか否かを判定する。
【0058】
自車の四方に設定されている撮像エリアo、p、q、rの各々について、同一の車両が所定時間以上併走していると判定すると(ステップS003でYes)、ストレス判定部503は、所定のストレス軽減アクションを実行するための指示を生成し、ストレス軽減処理部に出力して(ステップS004)、処理をステップS001に戻す。
【0059】
ここで、図15は、ストレス軽減アクションの処理を示したフロー図である。ストレス軽減処理部504は、ストレス軽減アクションの実行指示を受け付けると、かかる処理を開始する。
【0060】
ストレス軽減処理部504は、かかる指示を受け付けると、ストレス軽減アクションフラグがONであるか否かを判定する(ステップS101)。なお、ストレス軽減アクションフラグは、ストレス軽減アクションが実行される際、ONに設定される。また、ストレス軽減処理部504は、ストレス軽減アクションを終了すると、かかるフラグをOFFに設定する。
【0061】
判定の結果、フラグがONである場合(ステップS101でYes)、ストレス軽減処理部504は、ストレス軽減アクション処理を終了する。すなわち、ストレス軽減処理部504は、ストレス軽減アクションを実行しない。これは、ストレス軽減アクションを重複して実行しないようにするためである。
【0062】
一方で、フラグがOFFである場合(ステップS101でNo)、ストレス軽減処理部504は、フラグをONに設定し(ステップS102)、所定のストレス軽減アクションを実行する(ステップS103)。ストレス軽減アクションは、ユーザによって予め設定されていればよい。例えば、ストレス軽減処理部504は、ユーザの設定に応じて、ROM装置20に収容されているCD−ROMを再生する。例えば、ROM装置20に音楽CDが収容されている場合、所定の音楽がスピーカから出力されることによりユーザのストレスが軽減されることになる。
【0063】
また、ストレス軽減処理部504は、ユーザの設定に応じて、FM多重放送受信装置24で受信されたFM放送番組をスピーカから出力する。なお、ストレス軽減アクションは、このような処理に限られず、例えば、ユーザの設定に応じて、ドアウィンドウを開ける処理が実行されてもよい。車内に外気が取り入れられることで、ユーザのストレスが軽減されることになる。
【0064】
ストレス軽減処理部504は、所定時間(例えば、5分間)ストレス軽減アクションを実行した後、かかるアクションを終了し(ステップS104)、フラグをOFFに設定して(ステップS105)、ストレス軽減アクション処理を終了する。
【0065】
なお、後述のストレス判定処理B、Cにおいて、ストレス軽減アクションの開始指示を受信した場合でも、ストレス軽減処理部504は前述と同様のストレス軽減アクション処理を実行する。したがって、ストレス判定処理B、Cの説明では、ストレス軽減処理部504で実行されるストレス軽減アクション処理の説明を省略する。
【0066】
次に、ストレス判定処理Bについて説明する。図8は、ストレス判定処理Bを示したフロー図である。ストレス判定処理Bは、飛び出し注意や落石注意などの警戒標識がある道路を走行する、という状況が、より注意して運転する必要がある、というストレスをユーザに感じさせるため、かかる状況であるか否かを判定するために行われる。なお、ストレス判定処理Bは、判定装置100の起動とともに開始される。
【0067】
判定装置100が起動されると、ストレス判定部503は、車載カメラoにより車両前方の撮像エリアoを撮像した画像情報を車両制御装置200から取得する(ステップS011)。
【0068】
画像情報を取得すると(ステップS011)、ストレス判定部503は、警戒標識を検出したか否かを判定する(ステップS012)。具体的には、ストレス判定部503は、取得した画像情報に警戒標識が写っているか否かにより判定処理を行う。なお、警戒標識が画像に写っているか否かの判定は、例えば、記憶装置内に予め格納されている警戒標識情報を用いたパターンマッチング処理といった従来技術を用いて検出されればよい。
【0069】
判定の結果、取得した画像情報から警戒標識が検出されると(ステップS012でYes)、ストレス判定部503は、ストレス軽減アクションの開始指示を出力する(ステップS013)。一方で、取得した画像情報から警戒標識を検出しない場合(ステップS012でNo)、ストレス判定部503は、処理をステップS011に戻す。
【0070】
次に、プローブデータ400を用いて行うストレス判定処理Cについて説明する。図9は、かかる処理を示したフロー図である。ストレス判定処理Cは、判定装置100の起動とともに開始される。
【0071】
判定装置100が起動されると、ストレス判定部503は、プローブデータ400を車両制御装置200から取得する(ステップS021)。具体的には、ストレス判定部503は、最新の時刻が格納されているプローブデータ400のレコードを記憶装置11から取得する。
【0072】
プローブデータ400を取得すると(ステップS021)、ストレス判定部503は、プローブデータ400の車速フィールド402から車速を抽出する(ステップS022)。そして、ストレス判定部503は、抽出した車速が0.1km/h以上10.0km/h未満であるか否かを判定する(ステップS023)。
【0073】
判定の結果、抽出した車速が上記の速度範囲に含まれている場合(ステップS023でYes)、ストレス判定部は、詳細判定処理aに移行する。一方で、車速がかかる範囲内に含まれていない場合(ステップS023でNo)、ストレス判定部503は、処理をステップS024に移行する。
【0074】
ここで、詳細判定処理aについて説明する。図10は、詳細判定処理aを示したフロー図である。図示するように、ストレス判定部503は、ハンドル206の舵角フィールド407に格納される舵角が所定角(例えば、45°)よりも大きいか否かを判定する(ステップS031)。なお、判定に用いられる所定角を示す情報は、予め記憶装置11などの記録媒体に格納されていればよい。
【0075】
判定の結果、抽出した舵角が所定角よりも大きい場合(ステップS031でYes)、ストレス判定部503は、処理をステップS032に移行する。一方で、舵角が所定角よりも小さい場合、ストレス判定部503は、詳細判定処理aを終了し、処理をステップS026(図9)に移行する。
【0076】
舵角が所定角よりも大きい場合(ステップS031でYes)、ストレス判定部503は、ユーザが方向指示器207を点灯させたか否かを判定する(ステップS032)。具体的には、ストレス判定部503は、プローブデータ400のウィンカフィールド406に格納されている情報が「ON」であるか否かを判定する。
【0077】
判定の結果、ウィンカフィールド406の情報が「ON」である場合、すなわち、自車のウィンカが点灯している場合(ステップS032でYes)、ストレス判定部503は、処理をステップS033に移行する。一方で、ウィンカフィールド406の情報が「OFF」である場合、すなわち、自車のウィンカが点灯していない場合(ステップS032でNo)、ストレス判定部503は、詳細判定処理aを終了し、処理をステップS026(図9)に移行する。
【0078】
ウィンカが点灯されている場合(ステップS032でYes)、ストレス判定部503は、現在地がリンクの途中であるか否か、すなわち、現在地がノード(交差点)上に位置していないか、を判定する(ステップS033)。具体的には、ストレス判定部503は、経路探索部502で特定された現在地を示す座標情報と、現在地周辺にあるノードの座標情報と、の距離を比較し、両者が所定距離(例えば、50m)よりも離れているか否かを判定する。
【0079】
判定の結果、現在地と現在地周辺のノードとが所定の距離以上(例えば、50m)離れている場合、ストレス判定部503は、現在地がリンクの途中にあると判定し(ステップS033でYes)、ストレス軽減アクションの開始指示を出力する(ステップS034)。一方で、両者が所定の距離以上離れていない場合、ストレス判定部503は、詳細判定処理aを終了し、処理をステップS026(図9)に移行する。
【0080】
このようなストレス判定処理aは、例えば、自車前方に停車などしている車両や障害物がある場合、それを迂回する操作がなされたか否かを判定することができる。そして、かかる操作がなされたと判定した場合、ユーザが障害物を回避するというストレスを感じる状況にあると考えられるため、所定のストレス軽減アクションを実行することにより、ユーザのストレスを軽減させることができる。
【0081】
図9のフロー図に戻って説明を続ける。プローブデータ400の車速フィールド402に格納されている車速が0.1km/h以上10.0km/h未満でない場合(ステップS023でNo)、ストレス判定部503は、車速が0.0km/h(停車状態)であるか否かを判定する。
【0082】
判定の結果、車速が0.0km/hである場合、ストレス判定部503は、詳細判定処理bに移行する。一方で、車速が0.0km/hでない場合、ストレス判定部503は、処理をステップS025に移行する。
【0083】
ここで、詳細判定処理bについて説明する。図11は詳細判定処理bを示したフロー図である。図示するように、ストレス判定部503は、現在地がノードから所定の距離以内(例えば、50m以内)にあるか否かを判定する(ステップS041)。具体的には、ストレス判定部503は、経路探索部502で特定された現在地を示す座標情報を用いて、現在地周辺のノードとの間の距離が所定の距離以内であるか否かを判定する。
【0084】
判定の結果、現在地がノードから所定の距離以内である場合(ステップS041でYes)、ストレス判定部503は、処理をステップS042に移行する。一方で、現在地とノードとの距離が所定の距離よりも離れている場合(ステップS041でNo)、ストレス判定部503は、処理をステップS043に移行する。
【0085】
現在地が現在地周辺のノードから所定の距離以内である場合(ステップS041でYes)、ストレス判定部503は、画像情報から青信号を検出したか否かを判定する(ステップS042)。具体的には、ストレス判定部503は、プローブデータ400を取得したタイミングで生成された画像情報であって、車両前方の撮像エリアoを撮像した画像情報を車両制御装置200から取得する。
【0086】
また、ストレス判定部503は、取得した画像情報に、青色かつ所定以上の大きさの円状の被写体を特定するための処理を行う。なお、被写体の特定は、例えば、輝度差や色彩などを認識して対象物を特定する従来技術が用いられればよい。そして、画像情報から青信号を検出した場合(ステップS042でYes)、ストレス判定部503は、処理をステップS043に移行する。一方で、画像情報から青信号を検出しない場合(ステップS042でNo)、ストレス判定部503は、詳細判定処理bを終了し、処理をステップS026(図9)に移行する。
【0087】
ステップS043では、ストレス判定部503は、前方車両の方向指示器207が点灯しているか否かを判定する。具体的には、ストレス判定部503は、青信号の検出と同様に、車両前方の撮像エリアoを撮像した画像情報を車両制御装置200から取得し、かかる画像情報を解析する。そして、画像情報から前方車両の方向指示器207が点灯していることを検出すると(ステップS043でYes)、ストレス判定部503は、ストレス軽減アクションの開始指示を出力する(ステップS044)。一方で、前方車両の方向指示器207が点灯していることを検出しない場合(ステップS043でNo)、ストレス判定部503は、詳細判定処理bを終了し、処理をステップS026(図9)に移行する。
【0088】
このようなストレス判定処理bは、例えば、交差点や信号機の無い場所で、前方車両が右折するために停車しているか否かを判定することができる。そして、右折のための停車であると判定した場合、ユーザが右折待ちをするというストレスを感じる状況にあると考えられるため、所定のストレス軽減アクションを実行することにより、ユーザのストレスを軽減させることができる。
【0089】
再び、図9のフロー図に戻って説明を続ける。プローブデータ400の車速フィールド402に格納されている車速が0.0km/hでない場合(ステップS024でNo)、ストレス判定部503は、制限速度よりも20km/h以上下回った車速が車速フィールド402に格納されているか否かを判定する。なお、現在地のあるリンクの制限速度が30km/h以下である場合、ストレス判定部503は、車速フィールド402の車速が制限速度の30%〜50%の範囲に含まれる速度であるか否かを判定する。
【0090】
判定の結果、車速が制限速度よりも20km/h以上下回った速度である場合、または、制限速度が30km/h以下である時に制限速度の30%〜50%の範囲に含まれる速度である場合(ステップS025でYes)、ストレス判定部503は、詳細判定処理cに移行する。一方で、これらに該当しない場合(ステップS025でNo)、ストレス判定部503は、処理をステップS026に移行する。
【0091】
ここで、詳細判定処理cについて説明する。図12は詳細判定処理cを示したフロー図である。図示するように、ストレス判定部503は、前方車両との距離が所定の距離以内(例えば、3m以内)であるか否かを判定する(ステップS051)。具体的には、ストレス判定部503は、撮像エリアoを撮像した画像情報を用いて、自車と前方車両との車間距離を算出し、その距離を判定する。なお、車間距離は、焦点距離の調整、被写体同士の輝度差、トーンの違いなどから算出する従来技術が用いられればよい。
【0092】
判定の結果、前方車両との車間距離が所定の距離以内(例えば、3m)である場合(ステップS051でYes)、ストレス判定部503は、処理をステップS052に移行する。一方で、自車と前方車両との車間距離が所定の距離以上離れている場合、ストレス判定部503は、詳細判定処理cを終了し、処理をステップS026(図9)に移行する。
【0093】
車間距離が所定の距離以内である場合(ステップS051でYes)、ストレス判定部503は、現在地のある道路が渋滞道路であるか否かを判定する(ステップS052)。具体的には、ストレス判定部503は、現在地を示す座標情報を経路探索部から取得し、かかる座標情報から現在地のあるリンクを特定する。そして、ストレス判定部503は、現在地のある道路に渋滞が生じているか否かをVICS情報から特定する。
【0094】
判定の結果、現在地のある道路が渋滞していない場合(ステップS052でNo)、ストレス判定部503は、ストレス軽減アクションの開始指示を出力する。一方で、渋滞している場合(ステップS052でYes)、ストレス判定部503は、詳細判定処理cを終了し、処理をステップS026(図9)に移行する。
【0095】
このようなストレス判定処理cは、低速走行の要因が、前方走行車両であるか否かを判定することができる。そして、低速走行の要因が、前方走行車両であると判定した場合、ユーザが低速走行にストレスを感じる状況にあると考えられるため、所定のストレス軽減アクションを実行することにより、ユーザのストレスを軽減させることができる。このような例は、バス車両や初心者マークを付けた車両の後方を走行する場合などが考えられる。
【0096】
再び、図9のフロー図に戻って説明を続ける。ストレス判定部503は、プローブデータ400のアクセルフィールド403またはブレーキフィールド404に格納されている情報が「ON」であるか否かを判定する(ステップS026)。そして、いずれかのフィールドに格納されている情報が「ON」である場合、ストレス判定部は、詳細判定処理dに処理を移行する。一方で、アクセルフィールド403およびブレーキフィールド404の両者に格納される情報が「OFF」である場合、ストレス判定部503は、処理をステップS027に移行する。
【0097】
ここで、詳細判定処理dについて説明する。図13は、詳細判定処理dを示したフロー図である。前述のステップS026において、アクセルフィールド403の情報が「ON」であると判定した場合、ストレス判定部は、かかるフィールドを有するレコードの直前レコードのアクセルフィールド403に「OFF」が格納されているか否かを判定する(ステップS061)。また、前述のステップS026において、ブレーキフィールド404の情報が「ON」であると判定した場合も同様に、ストレス判定部503は、かかるフィールドを有するレコードの直前レコードのブレーキフィールド404に「OFF」が格納されているか否かを判定する(ステップS061)。
【0098】
アクセルペダル202、ブレーキペダル204が踏み続けられている間に生成されたレコードのアクセルフィールド403、ブレーキフィールド404には、連続して「ON」が格納され続ける。したがって、ストレス判定部503は、アクセルペダル202またはブレーキペダル204が単発的に踏まれたことを判別するため、直前レコードの対応するフィールドに「OFF」が格納されているかを判定する。
【0099】
直前レコードのアクセルフィールド403またはブレーキフィールド404に「OFF」が格納されている場合(ステップS061でYes)、ストレス判定部503は、処理をステップS062に移行する。一方で、直前レコードのアクセルフィールド403またはブレーキフィールド404に「ON」が格納されている場合(ステップS061でNo)、ストレス判定部503は、詳細判定処理dを終了し、処理をステップS027(図9)に移行する。
【0100】
ステップS062において、ストレス判定部503は、所定時間内(例えば、60秒以内)にアクセルペダル202操作およびブレーキペダル操作が所定数回数以上(例えば、アクセルペダル202操作およびブレーキペダル操作が各々10回ずつ)行われたか否かを判定する。具体的には、ストレス判定部503は、プローブデータ400の最新レコードおよび最新レコードよりも古い所定数のレコード(例えば、60個分のレコード)のアクセルフィールド403、ブレーキフィールド404を参照し、所定時間以内(例えば、60秒以内)になされたペダル操作の回数を算出する。
【0101】
なお、ストレス判定部503は、「ON」が格納されているレコードの直前レコードの対応するフィールドに「OFF」が格納されている場合のみ、ペダル操作回数を1つ加算する。すわなち、ストレス判定部503は、継続的にペダルが踏み込まれていた場合に連続して各レコードに格納される「ON」は、始めの「ON」すなわち直前レコードに「OFF」が格納されているものを1回として加算する。
【0102】
判定の結果、アクセルペダル202およびブレーキペダルが所定時間内(例えば、60秒以内)に所定回数以上(例えば、アクセルペダル202操作およびブレーキペダル操作が各々10回ずつ)操作されている場合(ステップS062でYes)、ストレス判定部503は、ストレス軽減アクションの開始指示を出力する(ステップS063)。一方で、両ペダル操作の合計が所定時間内に所定回数以上さていない場合(ステップS062でNo)、ストレス判定部503は、詳細判定処理dを終了し、処理をステップS027(図9)に移行する。
【0103】
このようなストレス判定処理dは、ユーザがアクセルペダルおよびブレーキペダルを短時間に多数回踏み換えているか否かを判定することができる。そして、多数踏み換えている場合、ユーザが前方の走行車両にストレスを感じる状況にあると考えられるため、所定のストレス軽減アクションを実行することにより、ユーザのストレスを軽減させることができる。このような例は、バス車両や初心者マークを付けた車両の後方を走行する場合などが考えられる。
【0104】
再び、図9に戻って説明を続ける。ステップS027において、ストレス判定部503は、警報フィールド405に「ON」が格納されているか否かを判定する。判定の結果、「ON」が格納されている場合、ストレス判定部503は、詳細判定処理eに移行する。一方で、警報フィールド405に「OFF」が格納されている場合、ストレス判定部503は、処理をステップS021に移行する。
【0105】
ここで、詳細判定処理eについて説明する。図14は、詳細判定処理eを示したフロー図である。前述のステップS027(図9)において、警報フィールド405の情報が「ON」であると判定した場合、ストレス判定部503は、かかるフィールドを有するレコードの直前レコードの警報フィールド405に「OFF」が格納されているか否かを判定する。
【0106】
警報指示器208が押し続けられている間に生成されたレコードの警報フィールド405には、連続して「ON」が格納され続ける。したがって、警報指示器208が単発的に押されたことを判別するため、ストレス判定部503は、直前レコードの対応するフィールドに「OFF」が格納されているかを判定する。
【0107】
直前レコードの警報フィールド405に「OFF」が格納されている場合(ステップS071でYes)、ストレス判定部503は、処理をステップS072に移行する。一方で、直前レコードの警報フィールド405に「ON」が格納されている場合(ステップS071でNo)、ストレス判定部503は、詳細判定処理eを終了し、処理をステップS021(図9)に移行する。
【0108】
ステップS072において、ストレス判定部503は、所定時間以内(例えば、60秒以内)に警報指示器208が所定回数以上(例えば、10回以上)押されたか否かを判定する。具体的には、ストレス判定部503は、プローブデータ400の最新レコードおよび最新レコードよりも古い所定数のレコード(例えば、60個分のレコード)の警報フィールド405から所定時間以内(例えば、60秒内)になされた警報指示器の操作回数を算出する。
【0109】
なお、ストレス判定部503は、「ON」が格納されているレコードの直前レコードの対応するフィールドに「OFF」が格納されている場合のみ、警報指示器の操作回数を1つ加算する。すわなち、ストレス判定部503は、継続的に警報指示器208が押されていた場合に連続して各レコードに格納される「ON」は、始めの「ON」すなわち直前レコードに「OFF」が格納されているものを1回として加算する。
【0110】
判定の結果、警報指示器208が所定時間以内(例えば、60秒以内)に所定回数以上(例えば、10回以上)操作されている場合(ステップS072でYes)、ストレス判定部503は、ストレス軽減アクションの開始指示を出力する(ステップS073)。一方で、警報指示器208の操作が所定時間以内に所定回数以上なされていない場合(ステップS072でNo)、ストレス判定部503は、詳細判定処理eを終了し、処理をステップS021(図9)に移行する。
【0111】
このようなストレス判定処理eは、ユーザが警報指示器を短時間に多数回押しているか否かを判定することができる。そして、多数回押している場合、ユーザが前方の走行車両にストレスを感じる状況にあると考えられるため、所定のストレス軽減アクションを実行することにより、ユーザのストレスを軽減させることができる。このような例は、運転に不慣れな車両や、交通ルールを守らない車両の後方を走行する場合などが考えられる。
【0112】
このような本実施形態に係る発明によれば、ユーザがストレスを感じる状況にあるか否かをより適切に判定することができる。
【0113】
なお、前述の実施形態では、判定処理A、B、詳細判定処理a〜eの何れかで所定の条件が満たされる場合に所定のストレス軽減アクションを実行したが、本発明は本実施形態に限られるものではない。例えば、本実施形態の変形例として、複数の判定処理において所定の条件が満たされる場合のみ、所定のストレス軽減アクションが実行される。例えば、判定処理A、B、詳細判定処理a〜eのうち、3つ以上の判定処理でユーザがストレスを感じる状況にあると判定された場合のみ、所定のストレス軽減アクションが実行される。
【0114】
このような変形例に係る発明によれば、ユーザがストレスを感じる状況にあるか否かをより適切に判定することができる。特に、複数の判定処理でストレスを感じる状況であると判定されなければストレス軽減アクションが実行されないため、頻繁にストレス軽減アクションが実行されてしまうことを回避することができる。
【0115】
なお、前述の実施形態では、判定装置を車載ナビゲーション装置として実現したが、本発明はかかる実施形態に限られるものではない。例えば、判定装置を船舶に搭載し、所定の判定を行うことによりユーザがストレスを感じる状況にあるか否かを判定するようにしてもよい。その際、海上における交通ルールなどを適用させてユーザがストレスを感じる状況にあるか否かを判定するようにする。
【符号の説明】
【0116】
100・・・判定装置、1・・・演算処理装置、
10・・・ディスプレイ、11・・・記憶装置、
13・・・音声入出力装置、16・・・入力装置、
20・・・ROM装置、21・・・車速センサ、
22・・・ジャイロセンサ、23・・・GPS受信装置、
24・・・FM多重放送受信装置、25・・・ビーコン受信装置
【特許請求の範囲】
【請求項1】
所定の情報を取得する取得手段と、
取得した前記情報を用いて、ユーザがストレスを感じる状況にあるか否かを判定する判定手段と、
前記判定手段で、ストレスを感じる状況であると判定された場合、所定のストレス軽減アクションを実行する実行手段と、
を備えることを特徴とする判定装置。
【請求項2】
請求項1または2に記載の判定装置であって、
前記取得手段は、車両周囲を撮像した画像情報を取得し、
前記判定手段は、
車両周囲を同一車両が所定時間以上併走していることを前記画像情報から検出すると、ユーザがストレスを感じる状況にあると判定する
ことを特徴とする判定装置。
【請求項3】
請求項2に記載の判定装置であって、
前記取得手段は、車速および車両操作に関する情報が格納されたプローブデータを取得し、
前記判定手段は、
前記プローブデータに所定の車速および所定の車両操作を示す情報が格納されている場合、ユーザがストレスを感じる状況にあると判定する
ことを特徴とする判定装置。
【請求項4】
請求項2に記載の判定装置であって、
前記取得手段は、車両の四方に各々設定される撮像エリアの被写体を撮像した画像情報を取得し、
前記判定手段は、
前記撮像エリアごとに、同一の車両が所定時間以上存在していることを検出すると、ユーザがストレスを感じる状況にあると判定する
ことを特徴とする判定装置。
【請求項5】
請求項1に記載の判定装置であって、
前記取得手段は、車両前方に設定される撮像エリアの被写体を撮像した画像情報を取得し、
前記判定手段は、
前記画像情報から所定の被写体を検出した場合、ユーザがストレスを感じる状況にあると判定する
ことを特徴とする判定装置。
【請求項6】
請求項3に記載の判定装置であって、
前記判定手段は、
前記プローブデータに格納される車速、舵角、ウィンカに関する情報および地図上における車両位置が所定の条件を満たす場合に、ユーザがストレスを感じる状況にあると判定する
ことを特徴とする判定装置。
【請求項7】
請求項3に記載の判定装置であって、
前記判定手段は、
前記プローブデータに格納される車速、ウィンカに関する情報および地図上における車両位置が所定の条件を満たし、かつ、前記画像情報から青信号を検出した場合、ユーザがストレスを感じる状況にあると判定する
ことを特徴とする判定装置。
【請求項8】
請求項7に記載の判定装置であって、
前記取得手段は、
前記地図上における車両位置が所定の条件を満たさない場合、車両があるリンクに渋滞が生じているか否かの情報を取得し、
前記判定手段は、
前記リンクが渋滞していない場合、ユーザがストレスを感じる状況にあると判定する
ことを特徴とする判定装置。
【請求項9】
請求項3に記載の判定装置であって、
前記判定手段は、
前記プローブデータに格納されるアクセルおよびブレーキに関する情報が所定の条件を満たす場合、ユーザがストレスを感じる状況にあると判定する
ことを特徴とする判定装置。
【請求項10】
請求項3に記載の判定装置であって、
前記判定手段は、
前記プローブデータに格納される警報に関する情報が所定の条件を満たす場合、ユーザがストレスを感じる状況にあると判定する
ことを特徴とする判定装置。
【請求項1】
所定の情報を取得する取得手段と、
取得した前記情報を用いて、ユーザがストレスを感じる状況にあるか否かを判定する判定手段と、
前記判定手段で、ストレスを感じる状況であると判定された場合、所定のストレス軽減アクションを実行する実行手段と、
を備えることを特徴とする判定装置。
【請求項2】
請求項1または2に記載の判定装置であって、
前記取得手段は、車両周囲を撮像した画像情報を取得し、
前記判定手段は、
車両周囲を同一車両が所定時間以上併走していることを前記画像情報から検出すると、ユーザがストレスを感じる状況にあると判定する
ことを特徴とする判定装置。
【請求項3】
請求項2に記載の判定装置であって、
前記取得手段は、車速および車両操作に関する情報が格納されたプローブデータを取得し、
前記判定手段は、
前記プローブデータに所定の車速および所定の車両操作を示す情報が格納されている場合、ユーザがストレスを感じる状況にあると判定する
ことを特徴とする判定装置。
【請求項4】
請求項2に記載の判定装置であって、
前記取得手段は、車両の四方に各々設定される撮像エリアの被写体を撮像した画像情報を取得し、
前記判定手段は、
前記撮像エリアごとに、同一の車両が所定時間以上存在していることを検出すると、ユーザがストレスを感じる状況にあると判定する
ことを特徴とする判定装置。
【請求項5】
請求項1に記載の判定装置であって、
前記取得手段は、車両前方に設定される撮像エリアの被写体を撮像した画像情報を取得し、
前記判定手段は、
前記画像情報から所定の被写体を検出した場合、ユーザがストレスを感じる状況にあると判定する
ことを特徴とする判定装置。
【請求項6】
請求項3に記載の判定装置であって、
前記判定手段は、
前記プローブデータに格納される車速、舵角、ウィンカに関する情報および地図上における車両位置が所定の条件を満たす場合に、ユーザがストレスを感じる状況にあると判定する
ことを特徴とする判定装置。
【請求項7】
請求項3に記載の判定装置であって、
前記判定手段は、
前記プローブデータに格納される車速、ウィンカに関する情報および地図上における車両位置が所定の条件を満たし、かつ、前記画像情報から青信号を検出した場合、ユーザがストレスを感じる状況にあると判定する
ことを特徴とする判定装置。
【請求項8】
請求項7に記載の判定装置であって、
前記取得手段は、
前記地図上における車両位置が所定の条件を満たさない場合、車両があるリンクに渋滞が生じているか否かの情報を取得し、
前記判定手段は、
前記リンクが渋滞していない場合、ユーザがストレスを感じる状況にあると判定する
ことを特徴とする判定装置。
【請求項9】
請求項3に記載の判定装置であって、
前記判定手段は、
前記プローブデータに格納されるアクセルおよびブレーキに関する情報が所定の条件を満たす場合、ユーザがストレスを感じる状況にあると判定する
ことを特徴とする判定装置。
【請求項10】
請求項3に記載の判定装置であって、
前記判定手段は、
前記プローブデータに格納される警報に関する情報が所定の条件を満たす場合、ユーザがストレスを感じる状況にあると判定する
ことを特徴とする判定装置。
【図1】


【図2】
【図3】

【図4】
【図5】

【図6】
【図7】
【図8】

【図9】
【図10】
【図11】

【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2013−61763(P2013−61763A)
【公開日】平成25年4月4日(2013.4.4)
【国際特許分類】
【出願番号】特願2011−199244(P2011−199244)
【出願日】平成23年9月13日(2011.9.13)
【出願人】(000001487)クラリオン株式会社 (1,722)
【Fターム(参考)】
【公開日】平成25年4月4日(2013.4.4)
【国際特許分類】
【出願日】平成23年9月13日(2011.9.13)
【出願人】(000001487)クラリオン株式会社 (1,722)
【Fターム(参考)】
[ Back to top ]