
到来方向標定装置および位置標定装置
【目的】本発明は、複数のアンテナで受信波の到来方向を求める到来方向標定装置と、複数の到来方向に所定の航法を適用することにより受信波が送信された位置を求める位置標定装置とに関し、構成の大幅な複雑化を生じることなく、柔軟に精度よく到来方向を求めることができる到来方向標定装置と、位置標定装置とを提供することを目的とする。
【解決手段】送信源から複数の位置に到来した受信波に基づいて受信波の到来方向を求める到来方向取得手段と、複数の位置と、到来方向と、所定の航法とに基づき受信波の送信源の推定方位を求める方位推定手段と、推定方位に対する到来方向の偏差と規定の範囲とに基づいて、到来方向毎に規定の範囲の内外を判別する判別手段とを備える。
【解決手段】送信源から複数の位置に到来した受信波に基づいて受信波の到来方向を求める到来方向取得手段と、複数の位置と、到来方向と、所定の航法とに基づき受信波の送信源の推定方位を求める方位推定手段と、推定方位に対する到来方向の偏差と規定の範囲とに基づいて、到来方向毎に規定の範囲の内外を判別する判別手段とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、複数のアンテナで受信波の到来方向を求める到来方向標定装置と、その到来方向標定装置によって求められた複数の到来方向に所定の航法を適用することにより受信波が送信された地点の位置を求める位置標定装置とに関する。
【背景技術】
【0002】
水面下の音を無線伝送するソノブイは、水面上の位置が航空機等の移動体(以下、単に「航空機」という。)に搭載された位置標定装置によって予め特定されなければならない。
従来の位置標定装置では、以下のような前提の下で、ソノブイの位置の標定が実現されていた。
【0003】
(1) 到来方向標定装置で求められた到来方向は制限なしに、ソノブイ位置を求めるために使用される。
(2) 複数の到来方向からソノブイ位置を求める。
【0004】
なお、本発明に関連性がある先行技術としては、以下に列記する先行技術がある。
(1) 「航空機のマルチパス誤差を補償したデータを有するマルチパス誤差補償テーブル6と、航法装置20から出力される航法信号による航法データの誤差を補償したデータを有する航法データ誤差補償テーブル7と、ソノブイからの発信信号が受信変換されたソノブイ信号に関する位相差誤差を補償したデータを有する位相差誤差補償テーブル8と、測角演算器4からの角度信号及び航法信号に基づいて到来角を算出する際、各誤差補償テーブル6,7,8から各誤差補償データを参照して誤差補償した到来角を用いてソノブイの設定位置を算出する誤差補償/位置評定演算器5とを備えることにより、簡易な構成で位相差検出誤差や移動体(航空機)固有の移動状態付随誤差(航法誤差)を抑制できると共に、ソノブイの位置評定を安定的に正確にして迅速に行い得る」点に特徴があるソノブイ位置評定装置…特許文献1
【0005】
(2) 「受信した信号から基準位置を受信復調部24で復調し、また電波到来角検出部23で移動体から見た基準位置送信用ブイの方位を受信した信号から移動体の2つの位置において検出し、2つの位置における基準位置送信用ブイの方位を基に、三角測量の原理を用いて基準位置送信用ブイの位置を評定処理部26で評定し、位置補正データ作成部25で基準位置送信用ブイの評定位置と復調した基準位置との誤差を表す位置補正データを作成すると共に、ソノブイからの電波を同様に電波到来角検出部23及び評定処理部26で処理しソノブイの位置を評定し、これを位置補正部27で位置補正データにより補正することにより、ソノブイの位置を短時間で高精度で安価に検出できる」点に特徴があるソノブイ位置検出方式…特許文献2
【0006】
(3) 「移動体用装置104に、送信時刻情報を移動体用拡散符号でスペクトラム拡散した信号を送信する装置2及び3を備え、ソノブイ用装置には、前記信号を受信し、移動体用拡散符号で逆拡散して送信時刻情報を復調した後、送信時刻情報をソノブイ用拡散符号で再びスペクトラム拡散して移動体用装置104に送信する機能を備え、移動体用装置104には、更に、ソノブイ用装置から送信される信号を受信して、ソノブイ用拡散符号で逆拡散して送信時刻情報を復調し、この送信時刻情報と受信時刻情報との差を演算する装置6、7、及び8を備えることによって、移動体においてソノブイの位置を高精度で検出することができる」点に特徴があるソノブイ位置検出方式…特許文献3
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開平8−110373号公報
【特許文献2】特開平8−114664号公報
【特許文献3】特開平8−114665号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかし、上述した従来例では、航空機の姿勢によっては、受信波が一部のアンテナを介しては受信されなかった場合、受信波の到来方向を正しく求めることができず、ソノブイ位置も正しく求めることができなかった。
【0009】
本発明は、構成の大幅な複雑化を生じることなく、柔軟に精度よく受信波の到来方向を求めることができる到来方向標定装置と、位置標定装置とを提供することを目的とする。
【課題を解決するための手段】
【0010】
請求項1に記載の発明では、到来方向取得手段は、送信源から複数Nの位置に到来した受信波に基づいて前記受信波の到来方向θ1〜θNを求める。方位推定手段は、前記複数Nの位置と、前記到来方向θ1〜θNと、所定の航法とに基づき前記受信波の送信源の推定方位Θ1〜ΘNを求める。判別手段は、前記推定方位Θi(i=1〜N)に対する前記到来方向θi(i=1〜N)の偏差と規定の範囲とに基づいて、前記到来方向θi毎に前記規定の範囲の内外を判別する。
【0011】
すなわち、複数Nの位置で受信波を取得し、到来方向θを求める。一方、受信波を取得した複数Nの位置と求めた到来方向θとを平均、三角測量、多角測量等の処理をして送信源の推定方位Θを求める。受信波を取得した位置毎で到来方向θと推定方位Θとの偏差を求め、規定の範囲内外の判別をする。
したがって、求められた受信波の到来方向θは、規定の範囲内の到来方向であるか判定することが可能となる。
【0012】
請求項2に記載の発明では、請求項1に記載の到来方向標定装置において、前記判別手段は、前記到来方向θi(i=1〜N)毎に前記偏差が前記規定の範囲内のときに、前記到来方向θiを前記送信源の方位とする。
【0013】
したがって、受信波を取得した位置毎に偏差が規定範囲内のときに、送信源の方位として求めた受信波の到来方向θを選択することが可能となる。
【0014】
請求項3に記載の発明では、請求項1に記載の到来方向標定装置において、前記判別手段は、前記到来方向θi(i=1〜N)毎に前記偏差が前記規定の範囲外のときに、前記推定方位Θi(i=1〜N)を前記送信源の方位とする。
【0015】
すなわち、受信波を取得した位置毎に偏差が規定範囲外のときに、送信源の方位として求めた受信波の到来方向θの替わりに推定方位Θを選択することが可能となる。
したがって、求めた受信波の到来方向θに含まれる誤差に起因して精度が低下することがあっても、推定方位Θを選択することにより、送信源の方位は安定に確度高く求められる。
【0016】
請求項4に記載の発明では、到来方向取得手段は、送信源から複数Nの位置に到来した受信波に基づいて前記受信波の到来方向θ1〜θNを求める。方位推定手段は、前記複数Nの位置と、前記到来方向θ1〜θNと、所定の航法とに基づき前記受信波の送信源の推定方位Θ1〜ΘNを求める。重み算出手段は、前記到来方向θi(i=1〜N)毎に前記推定方位Θi(i=1〜N)に対する偏差が大きいほど値が小さく、かつ前記偏差にそれぞれ対応した重みWi(i=1〜N)を求める。到来方向算出手段は、前記到来方向θi毎に前記重みWiとの積和として、前記送信源の方位を求める。
【0017】
すなわち、送信源の方位は受信波の到来方向θの偏差に対応した重みWを積和することで求められる。
したがって、求めた受信波の到来方向θに含まれる誤差に起因して精度が低下することがあっても、偏差が大きいほど値が小さい重みWによって到来方向θを修正することで、送信源の方位は安定に確度高く求められる。
【0018】
請求項5に記載の発明では、請求項4に記載の到来方向標定装置において、前記重み算出手段は、前記到来方向θi(i=1〜N)毎に前記推定方位Θi(i=1〜N)に対する偏差の評価関数が最小となる値として前記重みWi(i=1〜N)を求める。
【0019】
すなわち、重みは、受信波の到来方向θと推定方位Θとの偏差で求めた評価関数が最小となるとして求められる。
したがって、求めた受信波の到来方向θに含まれる誤差に起因して精度が低下することがあっても、重みWによって到来方向θを修正することで、送信源の方位は安定に確度高く求められる。
【発明の効果】
【0020】
本発明によれば、従来例で生じていた到来方向θに含まれる誤差に起因して精度が低下することによる不安定性は、ハードウェアの構成や処理量が大幅に増加することなく、しかも、精度が低下することなく安定に求められる。
【0021】
また、送信源の位置は、上記不安定性に制約されることなく、しかも、個々の受信波の到来方向に含まれる誤差に起因して精度が低下することなく、その送信源の位置の変位に柔軟に追従しつつ求められる。
したがって、本発明は、送信源の位置の標定にかかわる制約が大幅に緩和され、その標定の精度が安定に高く維持されると共に、多様な分野への柔軟な応用が可能となる。
【図面の簡単な説明】
【0022】
【図1】本発明の第一および第二の実施形態を示す図である。
【図2】本発明の第一および第二の実施形態における到来方向算出部の動作フローチャートである。
【図3】本発明の第一および第二の実施形態における到来方向測定原理を示す図である。
【図4】本発明の第一実施形態における到来方向判別部の動作フローチャートである。
【図5】本発明の第一および第二の実施形態における推定方位算出原理を示す図である。
【図6】本発明の第一および第二の実施形態における位置標定算出原理を示す図である。
【図7】本発明の第二実施形態における到来方向判別部の動作フローチャートである。
【発明を実施するための形態】
【0023】
以下、図面に基づいて本発明の実施形態について詳細に説明する。
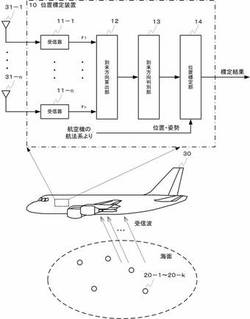
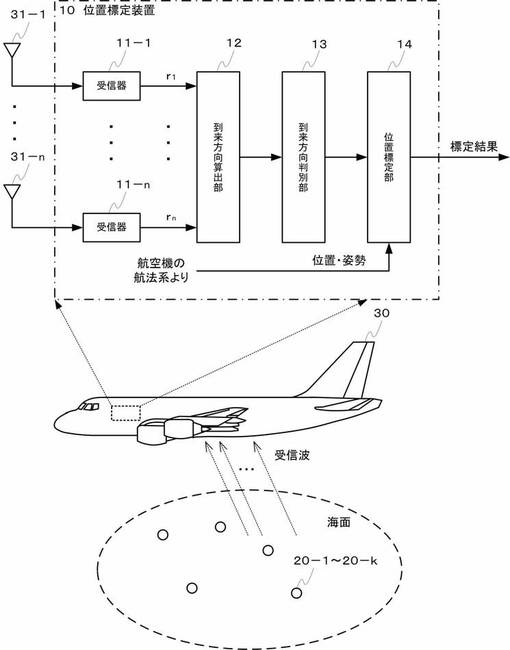
図1は、本発明の第一および第二の実施形態を示す図である。
【0024】
図において、位置標定装置10は、例えば、航空機30に搭載され、以下の通りに構成される。なお、航空機30はソノブイ20−1〜20−kが投下された海面上を飛行し、その航空機30の機体上には、アンテナ31−1〜31−nが取り付けられる。
【0025】
上記アンテナ31−1〜31−nの給電点は、複数の受信器11−1〜11−nの入力にそれぞれ接続される。これらの受信器11−1〜11−nの出力は到来方向算出部12の対応する入力に接続され、その到来方向算出部12の出力は到来方向判別部13の入力に接続される。さらに、その到来方向判別部13の出力は位置標定部14の第一の入力に接続される。位置標定部14の第二の入力には、航空機30の航法系(図示されない。)によってその航空機30の位置や姿勢が与えられ、この位置標定部14の出力には、ソノブイ20−1〜20−kに関して標定された個々の位置(標定結果)が出力される。
【0026】
〔第一の実施形態〕
図2は、本発明の第一の実施形態における到来方向算出部の動作フローチャートである。
図3は、本発明の第一の実施形態における到来方向測定原理を示す図である。
図4は、本発明の第一の実施形態における到来方向判別部の動作フローチャートである。
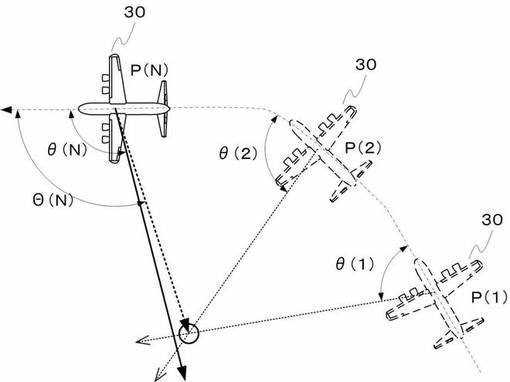
図5は、本発明の第一の実施形態における推定方位算出原理を示す図である。
図6は、本発明の第一の実施形態における位置標定算出原理を示す図である。
【0027】
以下、図1〜図6を参照して本発明の第一の実施形態の動作を説明する。なお、以下では、ソノブイ20−1〜20−kの内、位置の標定対象となる特定のソノブイについては、添え番号「1」〜「k」の何れも含まない符号「20」を付与して表記する。
【0028】
受信器11−1〜11−nは、ソノブイ20からアンテナ31−1〜31−nに到来した受信波r1〜rnを取り込み、例えば、所定の中間周波信号またはベースバンド信号として到来方向算出部12に引き渡す。
【0029】
到来方向算出部12は、以下の処理(以下、「到来方向算出処理」という。)を行う。
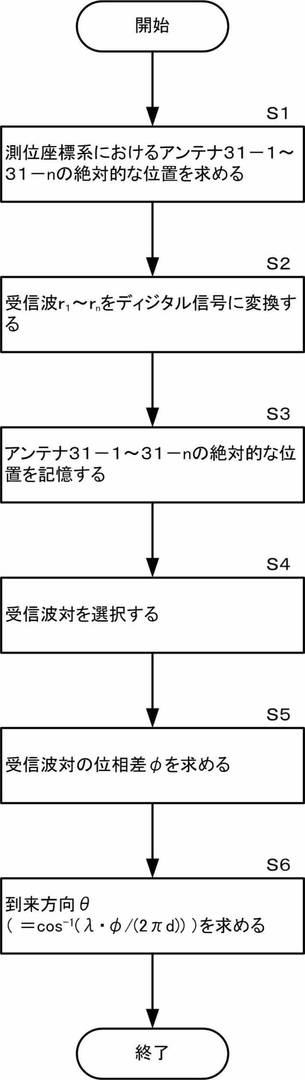
(1) 既述の航法系から与えられる航空機30の位置および姿勢と、これらの受信波r1〜rnが到来したアンテナ31−1〜31−nの航空機30上の取り付け位置とに基づいて、既定の座標系(以下、「測位座標系」という。)におけるこれらのアンテナ31−1〜31−nの絶対的な位置を求める(図2ステップS1)。
【0030】
(2) 受信波r1〜rnをディジタル信号に変換し(図2ステップS2)、これらのディジタル信号に併せて、上記アンテナ31−1〜31−nの絶対的な位置を記憶する(図2ステップS3)。
【0031】
(3) このようにして記憶された受信波r1〜rnから、それぞれ異なる2つの受信波の対(以下、「受信波対」という。)を選択する(図2ステップS4)。ここでは、受信波対として、例えば、r1とr2とを選択する。
【0032】
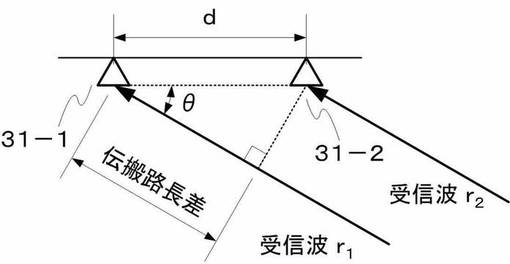
(4) 受信波対の位相差φを求める(図2ステップS5)。なお、このような位相差φは、受信波対の伝搬路長の差(図3)に起因して生じる。
【0033】
(5) 受信波対の位相差φと、受信波の波長λと、アンテナ31−1、31−2の間隔dとに対して下式で示される到来方向θを求める(図2ステップS6)。
θ=cos−1(λ・φ/(2πd))
【0034】
到来方向算出処理はいかなる方法を適用してもよい。受信波対を選択せずに、MUSIC(Multiple
Signal Classification)といった高分解能アルゴリズムを用いてもよい。
【0035】
到来方向判別部13は、以下の処理(以下、「到来方向判別処理」という。)を行う。
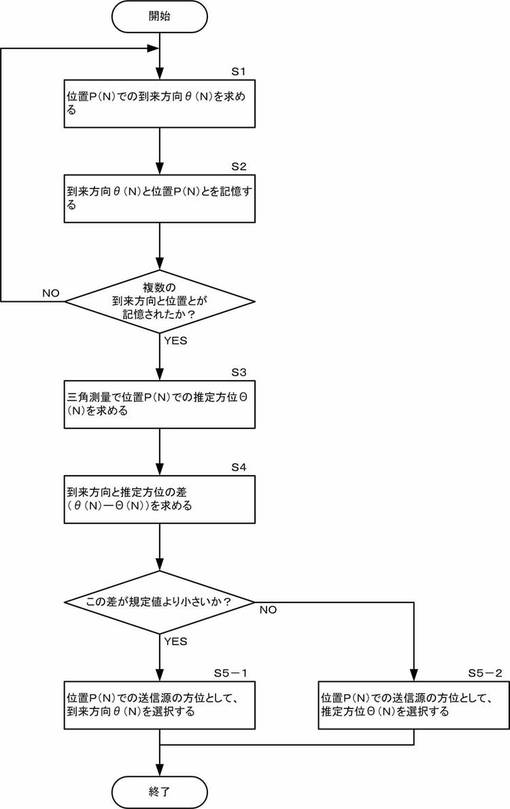
(1) 既述の到来方向算出処理から到来方向θを求める(図4ステップS1)。例えば、図5の航空機30の位置P(N)での到来方向θ(N)を求める。
【0036】
(2) 到来方向θ(N)と、測位座標系における到来方向θ(N)を測位した航空機の位置P(N)とを記憶する(図4ステップS2)。
【0037】
(3) 複数の到来方向θ(1)、θ(2)と航空機の位置P(1)、P(2)とを記憶していた場合、三角測量でθ(1)とθ(2)との交点位置を求める。航空機の位置P(N)と交点位置とから推定方位Θ(N)を求める(図4ステップS3)。ここでは、三角測量を取り上げたが、平均処理や多角測量等、交点位置を求める処理ならいかなる方法を適用してもよい。
【0038】
(4) 図4ステップS1で求めた到来方向θ(N)と図4ステップS3で求めた推定方位Θ(N)との差を求める(図4ステップS4)。
【0039】
(5) この差(θ(N)−Θ(N))が規定値より小さい場合、送信源の方位として、図4ステップS1で求めた到来方向θ(N)を選択する(図4ステップS5−1)。
【0040】
(6) この差(θ(N)−Θ(N))が規定値より大きい場合、送信源の方位として、図4ステップS3で求めた推定方位Θ(N)を選択する(図4ステップS5−2)。
【0041】
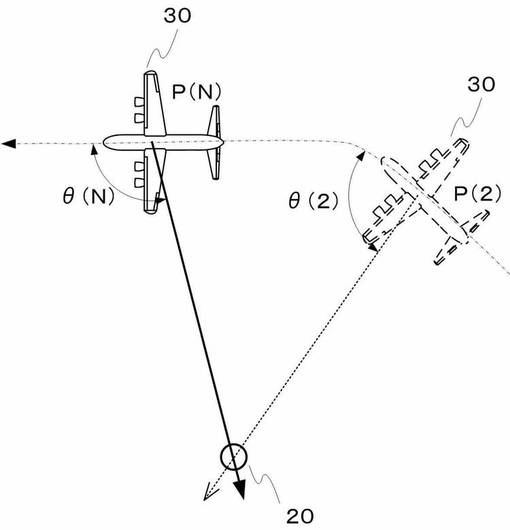
位置標定部14は、例えば、三角測量で送信源の方位として、選択したθ(N)とθ(2)との交点位置(図6)を求める。その交点がソノブイ20の位置と特定する。
【0042】
位置標定部14の処理はいかなる方法を適用してもよい。航空機の位置と到来方向とを用いて、カルマンフィルタ(Kalman
Filter)でソノブイ20の位置を特定してもよい。
【0043】
従来例で生じていた到来方向θに含まれる誤差に起因して精度が低下することによる不安定性は、ハードウェアの構成や処理量の大幅な増加を伴うことなく容易に排除される。
【0044】
したがって、本実施形態によれば、従来例に比べて、ソノブイの位置の標定にかかわる制約が大幅に緩和され、その標定の精度が安定に高く維持される。
【0045】
〔第二の実施形態〕
次に、本発明の第二の実施の形態について説明する。この実施の形態では、位置標定装置の構成、到来方向算出処理、位置標定部14の処理は第一の実施の形態と同じであるが、到来方向判別処理で重みを算出し、到来方向を補正することを特徴とする。以下に、詳細に説明をする。
【0046】
図5は、本発明の第二の実施形態における推定方位算出原理を示す図である。
図7は、本発明の第二の実施形態における到来方向判別部の動作フローチャートである。
【0047】
以下、図1、図5、図7を参照して本発明の第二の実施形態の動作を説明する。
ここでは、第一の実施形態と異なる到来方向判別処理について説明する。
【0048】
到来方向判別部13は、以下の到来方向判別処理を行う。
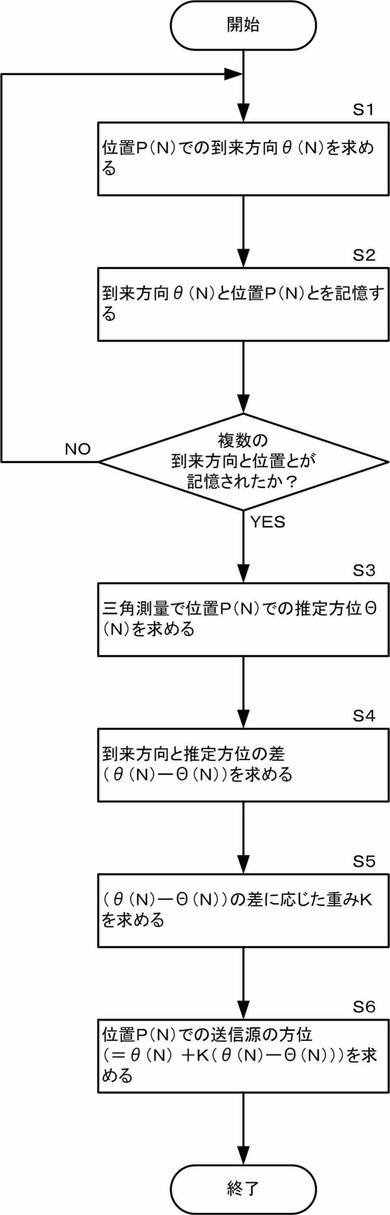
(1) 既述の到来方向算出処理から到来方向θを求める(図7ステップS1)。例えば、図5の航空機30の位置P(N)での到来方向θ(N)を求める。
【0049】
(2) 到来方向θ(N)と、測位座標系における到来方向θ(N)を測位した航空機の位置P(N)とを記憶する(図7ステップS2)。
【0050】
(3) 複数の到来方向θ(1)、θ(2)と航空機の位置P(1)、P(2)とを記憶していた場合、三角測量でθ(1)とθ(2)との交点位置を求める。航空機の位置P(N)と交点位置とから推定方位Θ(N)を求める(図7ステップS3)。ここでは、三角測量を取り上げたが、平均や多角測量等、交点位置を求める処理ならいかなる方法を適用してもよい。
【0051】
(4) 図7ステップS1で求めた到来方向θ(N)と図7ステップS3で求めた推定方位Θ(N)との差を求める(図7ステップS4)。
【0052】
(5) この差(θ(N)−Θ(N))の符号に応じた重みKを求める(図7ステップS5)。例えば、(θ(N)−Θ(N))が負の場合は、重みKを−1とする。(θ(N)−Θ(N))が正の場合は、重みKを+1とする。
【0053】
また、重みKは、評価関数(θ(N)−Θ(N))2を最小にする値として求めてもよい。さらに、この評価関数は、到来方向θ(N)と、航空機の位置P(N)と交点位置との距離や推定方位Θ(N)との関係を表現する式ならいかなる関数を適用してもよい。重みKは、評価関数が最小となるとして求められる。また、重みKは、評価関数によっては最大、傾き、平均値、規定を超えた回数等いかなる評価を適用してもよい。したがって、到来方向θ(N)が推定方位Θ(N)に近づく重みKを求められる評価関数ならいかなる関数を適用してもよい。
【0054】
(6) 図7ステップS4で求めた差(θ(N)−Θ(N))に重みKを乗算し、その結果を図7ステップS1で求めた到来方向θ(N)に加算する(図7ステップS6)。
【0055】
すなわち、従来例で生じていた到来方向θに含まれる誤差に起因して精度が低下することによる不安定性は、ハードウェアの構成や処理量の大幅な増加を伴うことなく容易に排除される。
【0056】
したがって、本実施形態によれば、従来例に比べて、ソノブイの位置の標定にかかわる制約が大幅に緩和され、その標定の精度が安定に高く維持される。
【0057】
なお、第一および第二の実施形態では、到来方向算出処理および位置標定処理は、ディジタル領域の処理として実現されている。
しかし、これらの処理は、例えば、アンテナ31−1〜31−nに到来した受信波の何れも、記憶されることなく、既述の処理に等価であるアナログ領域の処理が並行して施されてもよい。
【0058】
また、第一および第二の実施形態では、本発明は、受信波の到来方向に基づいてそのソノブイ20の位置を標定する位置標定装置に適用されている。
しかし、本発明は、このようなソノブイ20の位置の標定に限定されず、多様な無線周波信号の送信源の方位角や位置を標定するためにも適用可能である。
【0059】
さらに、第一および第二の実施形態では、ソノブイ20−1〜20−kの何れか1つから複数のアンテナに個別に到来した受信波の到来方向を求め、これらの到来方向に基づいてその1つのソノブイの位置を標定するために、本発明が適用されている。
しかし、本発明は、このような用途に限定されず、例えば、所定の多元接続方式が適用されることによって上記複数のソノブイとの間に異なる無線伝送路が形成されるならば、これらの複数のソノブイの個々の到来方向や位置の標定にも、同様に適用可能である。
【0060】
さらに、第一および第二の実施形態では、上記到来方向(方位角)および位置については、航空機30の航法系が与える航法座標系の下で求められる。なお、本発明は、本実施形態のような構成に限定されず、このような到来方向(方位角)が上記航法座標系の下では求められない場合には、航空機30の異なる位置でそれぞれ求められた到来方向(方位角)は、共通の航法座標系へマッピングされた後に位置の標定に供されてもよい。
【0061】
また、第一および第二の実施形態では、アンテナ31−1〜31−nが航空機30に取り付けられ、これらのアンテナ31−1〜31−nに到来した受信波の位相差に基づいてソノブイ20の方位および位置の標定が実現されている。
しかし、本発明はソノブイ20以外の送信機や送信源の方位・位置の標定にも適用可能であり、かつアンテナ31−1〜31−nは航空機20以外の移動体に取り付けられてもよい。
【0062】
さらに、本発明は、既述の実施形態に限定されず、本発明の範囲において多様な実施形態の構成が可能であり、構成要素の全てまたは一部に如何なる改良が施されてもよい。
【0063】
以下、本願に開示された発明を整理し、「特許請求の範囲」および「課題を解決するための手段」の欄の記載に準じた様式により列記する。
【0064】
[請求項1] 送信源から複数Nの位置に到来した受信波に基づいて前記受信波の到来方向θ1〜θNを求める到来方向取得手段と、
前記複数Nの位置と、前記到来方向θ1〜θNと、所定の航法とに基づき前記受信波の送信源の推定方位Θ1〜ΘNを求める方位推定手段と、
前記推定方位Θi(i=1〜N)に対する前記到来方向θi(i=1〜N)の偏差と規定の範囲とに基づいて、前記到来方向θi毎に前記規定の範囲の内外を判別する判別手段と
を備えたことを特徴とする到来方向標定装置。
【0065】
請求項1に記載の発明では、到来方向取得手段は、送信源から複数Nの位置に到来した受信波に基づいて前記受信波の到来方向θ1〜θNを求める。方位推定手段は、前記複数Nの位置と、前記到来方向θ1〜θNと、所定の航法とに基づき前記受信波の送信源の推定方位Θ1〜ΘNを求める。判別手段は、前記推定方位Θi(i=1〜N)に対する前記到来方向θi(i=1〜N)の偏差と規定の範囲とに基づいて、前記到来方向θi毎に前記規定の範囲の内外を判別する。
【0066】
すなわち、複数Nの位置で受信波を取得し、到来方向θを求める。一方、受信波を取得した複数Nの位置と求めた到来方向θとを平均、三角測量、多角測量等の処理をして送信源の推定方位Θを求める。受信波を取得した位置毎で到来方向θと推定方位Θとの偏差を求め、規定の範囲内外の判別をする。
したがって、求められた受信波の到来方向θは、規定の範囲内の到来方向であるか判定することが可能となる。
【0067】
[請求項2] 請求項1に記載の到来方向標定装置において、
前記判別手段は、
前記到来方向θi(i=1〜N)毎に前記偏差が前記規定の範囲内のときに、前記到来方向θiを前記送信源の方位とする
ことを特徴とする到来方向標定装置。
【0068】
請求項2に記載の発明では、請求項1に記載の到来方向標定装置において、前記判別手段は、前記到来方向θi(i=1〜N)毎に前記偏差が前記規定の範囲内のときに、前記到来方向θiを前記送信源の方位とする。
【0069】
したがって、受信波を取得した位置毎に偏差が規定範囲内のときに、送信源の方位として求めた受信波の到来方向θを選択することが可能となる。
【0070】
[請求項3] 請求項1に記載の到来方向標定装置において、
前記判別手段は、
前記到来方向θi(i=1〜N)毎に前記偏差が前記規定の範囲外のときに、前記推定方位Θi(i=1〜N)を前記送信源の方位とする
ことを特徴とする到来方向標定装置。
【0071】
請求項3に記載の発明では、請求項1に記載の到来方向標定装置において、前記判別手段は、前記到来方向θi(i=1〜N)毎に前記偏差が前記規定の範囲外のときに、前記推定方位Θi(i=1〜N)を前記送信源の方位とする。
【0072】
すなわち、受信波を取得した位置毎に偏差が規定範囲外のときに、送信源の方位として求めた受信波の到来方向θの替わりに推定方位Θを選択することが可能となる。
したがって、求めた受信波の到来方向θに含まれる誤差に起因して精度が低下することがあっても、推定方位Θを選択することにより、送信源の方位は安定に確度高く求められる。
【0073】
[請求項4] 送信源から複数Nの位置に到来した受信波に基づいて前記受信波の到来方向θ1〜θNを求める到来方向取得手段と、
前記複数Nの位置と、前記到来方向θ1〜θNと、所定の航法とに基づき前記受信波の送信源の推定方位Θ1〜ΘNを求める方位推定手段と、
前記到来方向θi(i=1〜N)毎に前記推定方位Θi(i=1〜N)に対する偏差が大きいほど値が小さく、かつ前記偏差にそれぞれ対応した重みWi(i=1〜N)を求める重み算出手段と、
前記到来方向θi毎に前記重みWiとの積和として、前記送信源の方位を求める到来方向算出手段と
を備えたことを特徴とする到来方向標定装置。
【0074】
請求項4に記載の発明では、到来方向取得手段は、送信源から複数Nの位置に到来した受信波に基づいて前記受信波の到来方向θ1〜θNを求める。方位推定手段は、前記複数Nの位置と、前記到来方向θ1〜θNと、所定の航法とに基づき前記受信波の送信源の推定方位Θ1〜ΘNを求める。重み算出手段は、前記到来方向θi(i=1〜N)毎に前記推定方位Θi(i=1〜N)に対する偏差が大きいほど値が小さく、かつ前記偏差にそれぞれ対応した重みWi(i=1〜N)を求める。到来方向算出手段は、前記到来方向θi毎に前記重みWiとの積和として、前記送信源の方位を求める。
【0075】
すなわち、送信源の方位は受信波の到来方向θの偏差に対応した重みWを積和することで求められる。
したがって、求めた受信波の到来方向θに含まれる誤差に起因して精度が低下することがあっても、偏差が大きいほど値が小さい重みWによって到来方向θを修正することで、送信源の方位は安定に確度高く求められる。
【0076】
[請求項5] 請求項4に記載の到来方向標定装置において、
前記重み算出手段は、
前記到来方向θi(i=1〜N)毎に前記推定方位Θi(i=1〜N)に対する偏差の評価関数が最小となる値として前記重みWi(i=1〜N)を求める
ことを特徴とする到来方向標定装置。
【0077】
請求項5に記載の発明では、請求項4に記載の到来方向標定装置において、前記重み算出手段は、前記到来方向θi(i=1〜N)毎に前記推定方位Θi(i=1〜N)に対する偏差の評価関数が最小となる値として前記重みWi(i=1〜N)を求める。
【0078】
すなわち、重みは、受信波の到来方向θと推定方位Θとの偏差で求めた評価関数が最小となるとして求められる。
したがって、求めた受信波の到来方向θに含まれる誤差に起因して精度が低下することがあっても、重みWによって到来方向θを修正することで、送信源の方位は安定に確度高く求められる。
【0079】
[請求項6] 送信源から複数Nの位置に到来した受信波に基づいて前記受信波の到来方向を求める到来方向標定装置と、
前記複数Nの位置と、前記到来方向θ1〜θNと、所定の航法とに基づき前記受信波の送信源の位置を求める測位手段とを備え、
前記到来方向標定装置は、
請求項1ないし請求項5の何れか1項に記載の到来方向標定装置である
ことを特徴とする位置標定装置。
【0080】
到来方向標定装置は送信源から複数Nの位置に到来した受信波に基づいて前記受信波の到来方向を求める。測位手段は、前記複数Nの位置と、前記到来方向θ1〜θNと、所定の航法とに基づき前記受信波の送信源の位置を求める。前記到来方向標定装置は、請求項1ないし請求項5の何れか1項に記載の到来方向標定装置である。
【0081】
すなわち、受信波の送信源の位置は、請求項1ないし請求項5の何れか1項に記載の到来方向標定装置によって安定に確度高く求められた到来方向に基づいて求められる。
したがって、受信波の送信源の位置は、精度よく求められる。
【符号の説明】
【0082】
10 位置標定装置
11 受信器
12 到来方向算出部
13 到来方向判別部
14 位置標定部
20 ソノブイ
30 航空機
31 アンテナ
【技術分野】
【0001】
本発明は、複数のアンテナで受信波の到来方向を求める到来方向標定装置と、その到来方向標定装置によって求められた複数の到来方向に所定の航法を適用することにより受信波が送信された地点の位置を求める位置標定装置とに関する。
【背景技術】
【0002】
水面下の音を無線伝送するソノブイは、水面上の位置が航空機等の移動体(以下、単に「航空機」という。)に搭載された位置標定装置によって予め特定されなければならない。
従来の位置標定装置では、以下のような前提の下で、ソノブイの位置の標定が実現されていた。
【0003】
(1) 到来方向標定装置で求められた到来方向は制限なしに、ソノブイ位置を求めるために使用される。
(2) 複数の到来方向からソノブイ位置を求める。
【0004】
なお、本発明に関連性がある先行技術としては、以下に列記する先行技術がある。
(1) 「航空機のマルチパス誤差を補償したデータを有するマルチパス誤差補償テーブル6と、航法装置20から出力される航法信号による航法データの誤差を補償したデータを有する航法データ誤差補償テーブル7と、ソノブイからの発信信号が受信変換されたソノブイ信号に関する位相差誤差を補償したデータを有する位相差誤差補償テーブル8と、測角演算器4からの角度信号及び航法信号に基づいて到来角を算出する際、各誤差補償テーブル6,7,8から各誤差補償データを参照して誤差補償した到来角を用いてソノブイの設定位置を算出する誤差補償/位置評定演算器5とを備えることにより、簡易な構成で位相差検出誤差や移動体(航空機)固有の移動状態付随誤差(航法誤差)を抑制できると共に、ソノブイの位置評定を安定的に正確にして迅速に行い得る」点に特徴があるソノブイ位置評定装置…特許文献1
【0005】
(2) 「受信した信号から基準位置を受信復調部24で復調し、また電波到来角検出部23で移動体から見た基準位置送信用ブイの方位を受信した信号から移動体の2つの位置において検出し、2つの位置における基準位置送信用ブイの方位を基に、三角測量の原理を用いて基準位置送信用ブイの位置を評定処理部26で評定し、位置補正データ作成部25で基準位置送信用ブイの評定位置と復調した基準位置との誤差を表す位置補正データを作成すると共に、ソノブイからの電波を同様に電波到来角検出部23及び評定処理部26で処理しソノブイの位置を評定し、これを位置補正部27で位置補正データにより補正することにより、ソノブイの位置を短時間で高精度で安価に検出できる」点に特徴があるソノブイ位置検出方式…特許文献2
【0006】
(3) 「移動体用装置104に、送信時刻情報を移動体用拡散符号でスペクトラム拡散した信号を送信する装置2及び3を備え、ソノブイ用装置には、前記信号を受信し、移動体用拡散符号で逆拡散して送信時刻情報を復調した後、送信時刻情報をソノブイ用拡散符号で再びスペクトラム拡散して移動体用装置104に送信する機能を備え、移動体用装置104には、更に、ソノブイ用装置から送信される信号を受信して、ソノブイ用拡散符号で逆拡散して送信時刻情報を復調し、この送信時刻情報と受信時刻情報との差を演算する装置6、7、及び8を備えることによって、移動体においてソノブイの位置を高精度で検出することができる」点に特徴があるソノブイ位置検出方式…特許文献3
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開平8−110373号公報
【特許文献2】特開平8−114664号公報
【特許文献3】特開平8−114665号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかし、上述した従来例では、航空機の姿勢によっては、受信波が一部のアンテナを介しては受信されなかった場合、受信波の到来方向を正しく求めることができず、ソノブイ位置も正しく求めることができなかった。
【0009】
本発明は、構成の大幅な複雑化を生じることなく、柔軟に精度よく受信波の到来方向を求めることができる到来方向標定装置と、位置標定装置とを提供することを目的とする。
【課題を解決するための手段】
【0010】
請求項1に記載の発明では、到来方向取得手段は、送信源から複数Nの位置に到来した受信波に基づいて前記受信波の到来方向θ1〜θNを求める。方位推定手段は、前記複数Nの位置と、前記到来方向θ1〜θNと、所定の航法とに基づき前記受信波の送信源の推定方位Θ1〜ΘNを求める。判別手段は、前記推定方位Θi(i=1〜N)に対する前記到来方向θi(i=1〜N)の偏差と規定の範囲とに基づいて、前記到来方向θi毎に前記規定の範囲の内外を判別する。
【0011】
すなわち、複数Nの位置で受信波を取得し、到来方向θを求める。一方、受信波を取得した複数Nの位置と求めた到来方向θとを平均、三角測量、多角測量等の処理をして送信源の推定方位Θを求める。受信波を取得した位置毎で到来方向θと推定方位Θとの偏差を求め、規定の範囲内外の判別をする。
したがって、求められた受信波の到来方向θは、規定の範囲内の到来方向であるか判定することが可能となる。
【0012】
請求項2に記載の発明では、請求項1に記載の到来方向標定装置において、前記判別手段は、前記到来方向θi(i=1〜N)毎に前記偏差が前記規定の範囲内のときに、前記到来方向θiを前記送信源の方位とする。
【0013】
したがって、受信波を取得した位置毎に偏差が規定範囲内のときに、送信源の方位として求めた受信波の到来方向θを選択することが可能となる。
【0014】
請求項3に記載の発明では、請求項1に記載の到来方向標定装置において、前記判別手段は、前記到来方向θi(i=1〜N)毎に前記偏差が前記規定の範囲外のときに、前記推定方位Θi(i=1〜N)を前記送信源の方位とする。
【0015】
すなわち、受信波を取得した位置毎に偏差が規定範囲外のときに、送信源の方位として求めた受信波の到来方向θの替わりに推定方位Θを選択することが可能となる。
したがって、求めた受信波の到来方向θに含まれる誤差に起因して精度が低下することがあっても、推定方位Θを選択することにより、送信源の方位は安定に確度高く求められる。
【0016】
請求項4に記載の発明では、到来方向取得手段は、送信源から複数Nの位置に到来した受信波に基づいて前記受信波の到来方向θ1〜θNを求める。方位推定手段は、前記複数Nの位置と、前記到来方向θ1〜θNと、所定の航法とに基づき前記受信波の送信源の推定方位Θ1〜ΘNを求める。重み算出手段は、前記到来方向θi(i=1〜N)毎に前記推定方位Θi(i=1〜N)に対する偏差が大きいほど値が小さく、かつ前記偏差にそれぞれ対応した重みWi(i=1〜N)を求める。到来方向算出手段は、前記到来方向θi毎に前記重みWiとの積和として、前記送信源の方位を求める。
【0017】
すなわち、送信源の方位は受信波の到来方向θの偏差に対応した重みWを積和することで求められる。
したがって、求めた受信波の到来方向θに含まれる誤差に起因して精度が低下することがあっても、偏差が大きいほど値が小さい重みWによって到来方向θを修正することで、送信源の方位は安定に確度高く求められる。
【0018】
請求項5に記載の発明では、請求項4に記載の到来方向標定装置において、前記重み算出手段は、前記到来方向θi(i=1〜N)毎に前記推定方位Θi(i=1〜N)に対する偏差の評価関数が最小となる値として前記重みWi(i=1〜N)を求める。
【0019】
すなわち、重みは、受信波の到来方向θと推定方位Θとの偏差で求めた評価関数が最小となるとして求められる。
したがって、求めた受信波の到来方向θに含まれる誤差に起因して精度が低下することがあっても、重みWによって到来方向θを修正することで、送信源の方位は安定に確度高く求められる。
【発明の効果】
【0020】
本発明によれば、従来例で生じていた到来方向θに含まれる誤差に起因して精度が低下することによる不安定性は、ハードウェアの構成や処理量が大幅に増加することなく、しかも、精度が低下することなく安定に求められる。
【0021】
また、送信源の位置は、上記不安定性に制約されることなく、しかも、個々の受信波の到来方向に含まれる誤差に起因して精度が低下することなく、その送信源の位置の変位に柔軟に追従しつつ求められる。
したがって、本発明は、送信源の位置の標定にかかわる制約が大幅に緩和され、その標定の精度が安定に高く維持されると共に、多様な分野への柔軟な応用が可能となる。
【図面の簡単な説明】
【0022】
【図1】本発明の第一および第二の実施形態を示す図である。
【図2】本発明の第一および第二の実施形態における到来方向算出部の動作フローチャートである。
【図3】本発明の第一および第二の実施形態における到来方向測定原理を示す図である。
【図4】本発明の第一実施形態における到来方向判別部の動作フローチャートである。
【図5】本発明の第一および第二の実施形態における推定方位算出原理を示す図である。
【図6】本発明の第一および第二の実施形態における位置標定算出原理を示す図である。
【図7】本発明の第二実施形態における到来方向判別部の動作フローチャートである。
【発明を実施するための形態】
【0023】
以下、図面に基づいて本発明の実施形態について詳細に説明する。
図1は、本発明の第一および第二の実施形態を示す図である。
【0024】
図において、位置標定装置10は、例えば、航空機30に搭載され、以下の通りに構成される。なお、航空機30はソノブイ20−1〜20−kが投下された海面上を飛行し、その航空機30の機体上には、アンテナ31−1〜31−nが取り付けられる。
【0025】
上記アンテナ31−1〜31−nの給電点は、複数の受信器11−1〜11−nの入力にそれぞれ接続される。これらの受信器11−1〜11−nの出力は到来方向算出部12の対応する入力に接続され、その到来方向算出部12の出力は到来方向判別部13の入力に接続される。さらに、その到来方向判別部13の出力は位置標定部14の第一の入力に接続される。位置標定部14の第二の入力には、航空機30の航法系(図示されない。)によってその航空機30の位置や姿勢が与えられ、この位置標定部14の出力には、ソノブイ20−1〜20−kに関して標定された個々の位置(標定結果)が出力される。
【0026】
〔第一の実施形態〕
図2は、本発明の第一の実施形態における到来方向算出部の動作フローチャートである。
図3は、本発明の第一の実施形態における到来方向測定原理を示す図である。
図4は、本発明の第一の実施形態における到来方向判別部の動作フローチャートである。
図5は、本発明の第一の実施形態における推定方位算出原理を示す図である。
図6は、本発明の第一の実施形態における位置標定算出原理を示す図である。
【0027】
以下、図1〜図6を参照して本発明の第一の実施形態の動作を説明する。なお、以下では、ソノブイ20−1〜20−kの内、位置の標定対象となる特定のソノブイについては、添え番号「1」〜「k」の何れも含まない符号「20」を付与して表記する。
【0028】
受信器11−1〜11−nは、ソノブイ20からアンテナ31−1〜31−nに到来した受信波r1〜rnを取り込み、例えば、所定の中間周波信号またはベースバンド信号として到来方向算出部12に引き渡す。
【0029】
到来方向算出部12は、以下の処理(以下、「到来方向算出処理」という。)を行う。
(1) 既述の航法系から与えられる航空機30の位置および姿勢と、これらの受信波r1〜rnが到来したアンテナ31−1〜31−nの航空機30上の取り付け位置とに基づいて、既定の座標系(以下、「測位座標系」という。)におけるこれらのアンテナ31−1〜31−nの絶対的な位置を求める(図2ステップS1)。
【0030】
(2) 受信波r1〜rnをディジタル信号に変換し(図2ステップS2)、これらのディジタル信号に併せて、上記アンテナ31−1〜31−nの絶対的な位置を記憶する(図2ステップS3)。
【0031】
(3) このようにして記憶された受信波r1〜rnから、それぞれ異なる2つの受信波の対(以下、「受信波対」という。)を選択する(図2ステップS4)。ここでは、受信波対として、例えば、r1とr2とを選択する。
【0032】
(4) 受信波対の位相差φを求める(図2ステップS5)。なお、このような位相差φは、受信波対の伝搬路長の差(図3)に起因して生じる。
【0033】
(5) 受信波対の位相差φと、受信波の波長λと、アンテナ31−1、31−2の間隔dとに対して下式で示される到来方向θを求める(図2ステップS6)。
θ=cos−1(λ・φ/(2πd))
【0034】
到来方向算出処理はいかなる方法を適用してもよい。受信波対を選択せずに、MUSIC(Multiple
Signal Classification)といった高分解能アルゴリズムを用いてもよい。
【0035】
到来方向判別部13は、以下の処理(以下、「到来方向判別処理」という。)を行う。
(1) 既述の到来方向算出処理から到来方向θを求める(図4ステップS1)。例えば、図5の航空機30の位置P(N)での到来方向θ(N)を求める。
【0036】
(2) 到来方向θ(N)と、測位座標系における到来方向θ(N)を測位した航空機の位置P(N)とを記憶する(図4ステップS2)。
【0037】
(3) 複数の到来方向θ(1)、θ(2)と航空機の位置P(1)、P(2)とを記憶していた場合、三角測量でθ(1)とθ(2)との交点位置を求める。航空機の位置P(N)と交点位置とから推定方位Θ(N)を求める(図4ステップS3)。ここでは、三角測量を取り上げたが、平均処理や多角測量等、交点位置を求める処理ならいかなる方法を適用してもよい。
【0038】
(4) 図4ステップS1で求めた到来方向θ(N)と図4ステップS3で求めた推定方位Θ(N)との差を求める(図4ステップS4)。
【0039】
(5) この差(θ(N)−Θ(N))が規定値より小さい場合、送信源の方位として、図4ステップS1で求めた到来方向θ(N)を選択する(図4ステップS5−1)。
【0040】
(6) この差(θ(N)−Θ(N))が規定値より大きい場合、送信源の方位として、図4ステップS3で求めた推定方位Θ(N)を選択する(図4ステップS5−2)。
【0041】
位置標定部14は、例えば、三角測量で送信源の方位として、選択したθ(N)とθ(2)との交点位置(図6)を求める。その交点がソノブイ20の位置と特定する。
【0042】
位置標定部14の処理はいかなる方法を適用してもよい。航空機の位置と到来方向とを用いて、カルマンフィルタ(Kalman
Filter)でソノブイ20の位置を特定してもよい。
【0043】
従来例で生じていた到来方向θに含まれる誤差に起因して精度が低下することによる不安定性は、ハードウェアの構成や処理量の大幅な増加を伴うことなく容易に排除される。
【0044】
したがって、本実施形態によれば、従来例に比べて、ソノブイの位置の標定にかかわる制約が大幅に緩和され、その標定の精度が安定に高く維持される。
【0045】
〔第二の実施形態〕
次に、本発明の第二の実施の形態について説明する。この実施の形態では、位置標定装置の構成、到来方向算出処理、位置標定部14の処理は第一の実施の形態と同じであるが、到来方向判別処理で重みを算出し、到来方向を補正することを特徴とする。以下に、詳細に説明をする。
【0046】
図5は、本発明の第二の実施形態における推定方位算出原理を示す図である。
図7は、本発明の第二の実施形態における到来方向判別部の動作フローチャートである。
【0047】
以下、図1、図5、図7を参照して本発明の第二の実施形態の動作を説明する。
ここでは、第一の実施形態と異なる到来方向判別処理について説明する。
【0048】
到来方向判別部13は、以下の到来方向判別処理を行う。
(1) 既述の到来方向算出処理から到来方向θを求める(図7ステップS1)。例えば、図5の航空機30の位置P(N)での到来方向θ(N)を求める。
【0049】
(2) 到来方向θ(N)と、測位座標系における到来方向θ(N)を測位した航空機の位置P(N)とを記憶する(図7ステップS2)。
【0050】
(3) 複数の到来方向θ(1)、θ(2)と航空機の位置P(1)、P(2)とを記憶していた場合、三角測量でθ(1)とθ(2)との交点位置を求める。航空機の位置P(N)と交点位置とから推定方位Θ(N)を求める(図7ステップS3)。ここでは、三角測量を取り上げたが、平均や多角測量等、交点位置を求める処理ならいかなる方法を適用してもよい。
【0051】
(4) 図7ステップS1で求めた到来方向θ(N)と図7ステップS3で求めた推定方位Θ(N)との差を求める(図7ステップS4)。
【0052】
(5) この差(θ(N)−Θ(N))の符号に応じた重みKを求める(図7ステップS5)。例えば、(θ(N)−Θ(N))が負の場合は、重みKを−1とする。(θ(N)−Θ(N))が正の場合は、重みKを+1とする。
【0053】
また、重みKは、評価関数(θ(N)−Θ(N))2を最小にする値として求めてもよい。さらに、この評価関数は、到来方向θ(N)と、航空機の位置P(N)と交点位置との距離や推定方位Θ(N)との関係を表現する式ならいかなる関数を適用してもよい。重みKは、評価関数が最小となるとして求められる。また、重みKは、評価関数によっては最大、傾き、平均値、規定を超えた回数等いかなる評価を適用してもよい。したがって、到来方向θ(N)が推定方位Θ(N)に近づく重みKを求められる評価関数ならいかなる関数を適用してもよい。
【0054】
(6) 図7ステップS4で求めた差(θ(N)−Θ(N))に重みKを乗算し、その結果を図7ステップS1で求めた到来方向θ(N)に加算する(図7ステップS6)。
【0055】
すなわち、従来例で生じていた到来方向θに含まれる誤差に起因して精度が低下することによる不安定性は、ハードウェアの構成や処理量の大幅な増加を伴うことなく容易に排除される。
【0056】
したがって、本実施形態によれば、従来例に比べて、ソノブイの位置の標定にかかわる制約が大幅に緩和され、その標定の精度が安定に高く維持される。
【0057】
なお、第一および第二の実施形態では、到来方向算出処理および位置標定処理は、ディジタル領域の処理として実現されている。
しかし、これらの処理は、例えば、アンテナ31−1〜31−nに到来した受信波の何れも、記憶されることなく、既述の処理に等価であるアナログ領域の処理が並行して施されてもよい。
【0058】
また、第一および第二の実施形態では、本発明は、受信波の到来方向に基づいてそのソノブイ20の位置を標定する位置標定装置に適用されている。
しかし、本発明は、このようなソノブイ20の位置の標定に限定されず、多様な無線周波信号の送信源の方位角や位置を標定するためにも適用可能である。
【0059】
さらに、第一および第二の実施形態では、ソノブイ20−1〜20−kの何れか1つから複数のアンテナに個別に到来した受信波の到来方向を求め、これらの到来方向に基づいてその1つのソノブイの位置を標定するために、本発明が適用されている。
しかし、本発明は、このような用途に限定されず、例えば、所定の多元接続方式が適用されることによって上記複数のソノブイとの間に異なる無線伝送路が形成されるならば、これらの複数のソノブイの個々の到来方向や位置の標定にも、同様に適用可能である。
【0060】
さらに、第一および第二の実施形態では、上記到来方向(方位角)および位置については、航空機30の航法系が与える航法座標系の下で求められる。なお、本発明は、本実施形態のような構成に限定されず、このような到来方向(方位角)が上記航法座標系の下では求められない場合には、航空機30の異なる位置でそれぞれ求められた到来方向(方位角)は、共通の航法座標系へマッピングされた後に位置の標定に供されてもよい。
【0061】
また、第一および第二の実施形態では、アンテナ31−1〜31−nが航空機30に取り付けられ、これらのアンテナ31−1〜31−nに到来した受信波の位相差に基づいてソノブイ20の方位および位置の標定が実現されている。
しかし、本発明はソノブイ20以外の送信機や送信源の方位・位置の標定にも適用可能であり、かつアンテナ31−1〜31−nは航空機20以外の移動体に取り付けられてもよい。
【0062】
さらに、本発明は、既述の実施形態に限定されず、本発明の範囲において多様な実施形態の構成が可能であり、構成要素の全てまたは一部に如何なる改良が施されてもよい。
【0063】
以下、本願に開示された発明を整理し、「特許請求の範囲」および「課題を解決するための手段」の欄の記載に準じた様式により列記する。
【0064】
[請求項1] 送信源から複数Nの位置に到来した受信波に基づいて前記受信波の到来方向θ1〜θNを求める到来方向取得手段と、
前記複数Nの位置と、前記到来方向θ1〜θNと、所定の航法とに基づき前記受信波の送信源の推定方位Θ1〜ΘNを求める方位推定手段と、
前記推定方位Θi(i=1〜N)に対する前記到来方向θi(i=1〜N)の偏差と規定の範囲とに基づいて、前記到来方向θi毎に前記規定の範囲の内外を判別する判別手段と
を備えたことを特徴とする到来方向標定装置。
【0065】
請求項1に記載の発明では、到来方向取得手段は、送信源から複数Nの位置に到来した受信波に基づいて前記受信波の到来方向θ1〜θNを求める。方位推定手段は、前記複数Nの位置と、前記到来方向θ1〜θNと、所定の航法とに基づき前記受信波の送信源の推定方位Θ1〜ΘNを求める。判別手段は、前記推定方位Θi(i=1〜N)に対する前記到来方向θi(i=1〜N)の偏差と規定の範囲とに基づいて、前記到来方向θi毎に前記規定の範囲の内外を判別する。
【0066】
すなわち、複数Nの位置で受信波を取得し、到来方向θを求める。一方、受信波を取得した複数Nの位置と求めた到来方向θとを平均、三角測量、多角測量等の処理をして送信源の推定方位Θを求める。受信波を取得した位置毎で到来方向θと推定方位Θとの偏差を求め、規定の範囲内外の判別をする。
したがって、求められた受信波の到来方向θは、規定の範囲内の到来方向であるか判定することが可能となる。
【0067】
[請求項2] 請求項1に記載の到来方向標定装置において、
前記判別手段は、
前記到来方向θi(i=1〜N)毎に前記偏差が前記規定の範囲内のときに、前記到来方向θiを前記送信源の方位とする
ことを特徴とする到来方向標定装置。
【0068】
請求項2に記載の発明では、請求項1に記載の到来方向標定装置において、前記判別手段は、前記到来方向θi(i=1〜N)毎に前記偏差が前記規定の範囲内のときに、前記到来方向θiを前記送信源の方位とする。
【0069】
したがって、受信波を取得した位置毎に偏差が規定範囲内のときに、送信源の方位として求めた受信波の到来方向θを選択することが可能となる。
【0070】
[請求項3] 請求項1に記載の到来方向標定装置において、
前記判別手段は、
前記到来方向θi(i=1〜N)毎に前記偏差が前記規定の範囲外のときに、前記推定方位Θi(i=1〜N)を前記送信源の方位とする
ことを特徴とする到来方向標定装置。
【0071】
請求項3に記載の発明では、請求項1に記載の到来方向標定装置において、前記判別手段は、前記到来方向θi(i=1〜N)毎に前記偏差が前記規定の範囲外のときに、前記推定方位Θi(i=1〜N)を前記送信源の方位とする。
【0072】
すなわち、受信波を取得した位置毎に偏差が規定範囲外のときに、送信源の方位として求めた受信波の到来方向θの替わりに推定方位Θを選択することが可能となる。
したがって、求めた受信波の到来方向θに含まれる誤差に起因して精度が低下することがあっても、推定方位Θを選択することにより、送信源の方位は安定に確度高く求められる。
【0073】
[請求項4] 送信源から複数Nの位置に到来した受信波に基づいて前記受信波の到来方向θ1〜θNを求める到来方向取得手段と、
前記複数Nの位置と、前記到来方向θ1〜θNと、所定の航法とに基づき前記受信波の送信源の推定方位Θ1〜ΘNを求める方位推定手段と、
前記到来方向θi(i=1〜N)毎に前記推定方位Θi(i=1〜N)に対する偏差が大きいほど値が小さく、かつ前記偏差にそれぞれ対応した重みWi(i=1〜N)を求める重み算出手段と、
前記到来方向θi毎に前記重みWiとの積和として、前記送信源の方位を求める到来方向算出手段と
を備えたことを特徴とする到来方向標定装置。
【0074】
請求項4に記載の発明では、到来方向取得手段は、送信源から複数Nの位置に到来した受信波に基づいて前記受信波の到来方向θ1〜θNを求める。方位推定手段は、前記複数Nの位置と、前記到来方向θ1〜θNと、所定の航法とに基づき前記受信波の送信源の推定方位Θ1〜ΘNを求める。重み算出手段は、前記到来方向θi(i=1〜N)毎に前記推定方位Θi(i=1〜N)に対する偏差が大きいほど値が小さく、かつ前記偏差にそれぞれ対応した重みWi(i=1〜N)を求める。到来方向算出手段は、前記到来方向θi毎に前記重みWiとの積和として、前記送信源の方位を求める。
【0075】
すなわち、送信源の方位は受信波の到来方向θの偏差に対応した重みWを積和することで求められる。
したがって、求めた受信波の到来方向θに含まれる誤差に起因して精度が低下することがあっても、偏差が大きいほど値が小さい重みWによって到来方向θを修正することで、送信源の方位は安定に確度高く求められる。
【0076】
[請求項5] 請求項4に記載の到来方向標定装置において、
前記重み算出手段は、
前記到来方向θi(i=1〜N)毎に前記推定方位Θi(i=1〜N)に対する偏差の評価関数が最小となる値として前記重みWi(i=1〜N)を求める
ことを特徴とする到来方向標定装置。
【0077】
請求項5に記載の発明では、請求項4に記載の到来方向標定装置において、前記重み算出手段は、前記到来方向θi(i=1〜N)毎に前記推定方位Θi(i=1〜N)に対する偏差の評価関数が最小となる値として前記重みWi(i=1〜N)を求める。
【0078】
すなわち、重みは、受信波の到来方向θと推定方位Θとの偏差で求めた評価関数が最小となるとして求められる。
したがって、求めた受信波の到来方向θに含まれる誤差に起因して精度が低下することがあっても、重みWによって到来方向θを修正することで、送信源の方位は安定に確度高く求められる。
【0079】
[請求項6] 送信源から複数Nの位置に到来した受信波に基づいて前記受信波の到来方向を求める到来方向標定装置と、
前記複数Nの位置と、前記到来方向θ1〜θNと、所定の航法とに基づき前記受信波の送信源の位置を求める測位手段とを備え、
前記到来方向標定装置は、
請求項1ないし請求項5の何れか1項に記載の到来方向標定装置である
ことを特徴とする位置標定装置。
【0080】
到来方向標定装置は送信源から複数Nの位置に到来した受信波に基づいて前記受信波の到来方向を求める。測位手段は、前記複数Nの位置と、前記到来方向θ1〜θNと、所定の航法とに基づき前記受信波の送信源の位置を求める。前記到来方向標定装置は、請求項1ないし請求項5の何れか1項に記載の到来方向標定装置である。
【0081】
すなわち、受信波の送信源の位置は、請求項1ないし請求項5の何れか1項に記載の到来方向標定装置によって安定に確度高く求められた到来方向に基づいて求められる。
したがって、受信波の送信源の位置は、精度よく求められる。
【符号の説明】
【0082】
10 位置標定装置
11 受信器
12 到来方向算出部
13 到来方向判別部
14 位置標定部
20 ソノブイ
30 航空機
31 アンテナ
【特許請求の範囲】
【請求項1】
送信源から複数Nの位置に到来した受信波に基づいて前記受信波の到来方向θ1〜θNを求める到来方向取得手段と、
前記複数Nの位置と、前記到来方向θ1〜θNと、所定の航法とに基づき前記受信波の送信源の推定方位Θ1〜ΘNを求める方位推定手段と、
前記推定方位Θi(i=1〜N)に対する前記到来方向θi(i=1〜N)の偏差と規定の範囲とに基づいて、前記到来方向θi毎に前記規定の範囲の内外を判別する判別手段と
を備えたことを特徴とする到来方向標定装置。
【請求項2】
請求項1に記載の到来方向標定装置において、
前記判別手段は、
前記到来方向θi(i=1〜N)毎に前記偏差が前記規定の範囲内のときに、前記到来方向θiを前記送信源の方位とする
ことを特徴とする到来方向標定装置。
【請求項3】
請求項1に記載の到来方向標定装置において、
前記判別手段は、
前記到来方向θi(i=1〜N)毎に前記偏差が前記規定の範囲外のときに、前記推定方位Θi(i=1〜N)を前記送信源の方位とする
ことを特徴とする到来方向標定装置。
【請求項4】
送信源から複数Nの位置に到来した受信波に基づいて前記受信波の到来方向θ1〜θNを求める到来方向取得手段と、
前記複数Nの位置と、前記到来方向θ1〜θNと、所定の航法とに基づき前記受信波の送信源の推定方位Θ1〜ΘNを求める方位推定手段と、
前記到来方向θi(i=1〜N)毎に前記推定方位Θi(i=1〜N)に対する偏差が大きいほど値が小さく、かつ前記偏差にそれぞれ対応した重みWi(i=1〜N)を求める重み算出手段と、
前記到来方向θi毎に前記重みWiとの積和として、前記送信源の方位を求める到来方向算出手段と
を備えたことを特徴とする到来方向標定装置。
【請求項5】
請求項4に記載の到来方向標定装置において、
前記重み算出手段は、
前記到来方向θi(i=1〜N)毎に前記推定方位Θi(i=1〜N)に対する偏差の評価関数が最小となる値として前記重みWi(i=1〜N)を求める
ことを特徴とする到来方向標定装置。
【請求項1】
送信源から複数Nの位置に到来した受信波に基づいて前記受信波の到来方向θ1〜θNを求める到来方向取得手段と、
前記複数Nの位置と、前記到来方向θ1〜θNと、所定の航法とに基づき前記受信波の送信源の推定方位Θ1〜ΘNを求める方位推定手段と、
前記推定方位Θi(i=1〜N)に対する前記到来方向θi(i=1〜N)の偏差と規定の範囲とに基づいて、前記到来方向θi毎に前記規定の範囲の内外を判別する判別手段と
を備えたことを特徴とする到来方向標定装置。
【請求項2】
請求項1に記載の到来方向標定装置において、
前記判別手段は、
前記到来方向θi(i=1〜N)毎に前記偏差が前記規定の範囲内のときに、前記到来方向θiを前記送信源の方位とする
ことを特徴とする到来方向標定装置。
【請求項3】
請求項1に記載の到来方向標定装置において、
前記判別手段は、
前記到来方向θi(i=1〜N)毎に前記偏差が前記規定の範囲外のときに、前記推定方位Θi(i=1〜N)を前記送信源の方位とする
ことを特徴とする到来方向標定装置。
【請求項4】
送信源から複数Nの位置に到来した受信波に基づいて前記受信波の到来方向θ1〜θNを求める到来方向取得手段と、
前記複数Nの位置と、前記到来方向θ1〜θNと、所定の航法とに基づき前記受信波の送信源の推定方位Θ1〜ΘNを求める方位推定手段と、
前記到来方向θi(i=1〜N)毎に前記推定方位Θi(i=1〜N)に対する偏差が大きいほど値が小さく、かつ前記偏差にそれぞれ対応した重みWi(i=1〜N)を求める重み算出手段と、
前記到来方向θi毎に前記重みWiとの積和として、前記送信源の方位を求める到来方向算出手段と
を備えたことを特徴とする到来方向標定装置。
【請求項5】
請求項4に記載の到来方向標定装置において、
前記重み算出手段は、
前記到来方向θi(i=1〜N)毎に前記推定方位Θi(i=1〜N)に対する偏差の評価関数が最小となる値として前記重みWi(i=1〜N)を求める
ことを特徴とする到来方向標定装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−8011(P2012−8011A)
【公開日】平成24年1月12日(2012.1.12)
【国際特許分類】
【出願番号】特願2010−144397(P2010−144397)
【出願日】平成22年6月25日(2010.6.25)
【出願人】(000004330)日本無線株式会社 (1,186)
【Fターム(参考)】
【公開日】平成24年1月12日(2012.1.12)
【国際特許分類】
【出願日】平成22年6月25日(2010.6.25)
【出願人】(000004330)日本無線株式会社 (1,186)
【Fターム(参考)】
[ Back to top ]