
到着要求時刻遂行能力表示のための方法およびシステム
到着要求時刻(RTA)遂行能力グラフィック表示のための方法およびシステムが提供される。このシステムは、到着要求時刻を受け取るようにプログラムされたプロセッサと、プロセッサに通信可能に結合された第1の視覚表示器とを含む。第1の視覚表示器は、軸のまわりに実質的に対称なダイヤルを有するRTAグラフィックと、所定の中間地点の現時点の到着予定時刻(ETA)を示す第1のマーカと、現時点ETA値および選択したRTA時刻許容値に関連するRTAの値を示す第2のマーカと、乗物が所定の中間地点に到達することができる最先時刻を表す第1の指示と、乗物が所定の中間地点に到達することができる最終時刻を表す第2の指示と、早い到着方向におけるETAの不確実性を表す第3の指示と、遅い到着方向におけるETAの不確実性を表す第4の指示とを含む。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は一般に乗物航法および誘導システムに関し、より詳細には、到着要求時刻に対処するための乗物の遂行能力を表示する方法およびシステムに関する。
【背景技術】
【0002】
少なくともいくつかの既知の乗物、特に航空機は対応する所定の時刻に航路に沿った特定の位置に到着するように制御される。そのような到着要求時刻の制御により、共通空域を使用する航空交通量を増加させることができる。現時点の運航において、航空機搭乗員は、中央ペデスタルエリアに取り付けられた制御表示ユニット上の数値表示を見ることによって到着要求時刻(RTA)追従をモニタすることができる。しかし、パイロットの前方視野の外側の数値表示は、パイロットが多くの努力をすることなしには読み取りおよび解釈するのが困難である。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】米国特許第2003/139876号
【発明の概要】
【課題を解決するための手段】
【0004】
一実施形態では、到着要求時刻(RTA)遂行能力グラフィック表示のシステムは、到着要求時刻に関連する所定のパラメータを受け取るようにプログラムされたプロセッサと、プロセッサに通信可能に結合された第1の視覚表示器とを含む。第1の視覚表示器は、軸のまわりに実質的に対称なダイヤルを有するRTAグラフィックと、所定の中間地点の現時点の到着予定時刻(ETA)を示す第1のマーカと、現時点ETA値および選択したRTA時刻許容値に関連するRTAの値を示す第2のマーカと、乗物が所定の中間地点に到達することができる最先時刻を表す第1の指示と、乗物が所定の中間地点に到達することができる最終時刻を表す第2の指示と、早い到着方向におけるETAの不確実性を表す第3の指示と、遅い到着方向におけるETAの不確実性を表す第4の指示とを含む。
【0005】
別の実施形態では、到着要求時刻(RTA)遂行能力を表示する方法は、中間地点の位置情報、中間地点の乗物の到着要求時刻(RTA)、RTAに関する許容度、および中間地点の到着予定時刻(ETA)を含む中間地点情報を受け取るステップと、ETAを基準としてRTAをグラフィックで表示するステップとを含む。
【0006】
さらなる別の実施形態では、グラフィック表示画面を含む前方視野表示システムが提供される。グラフィック表示画面は複数の指示エリアを含み、少なくとも1つの指示エリアには、所定の中間地点の現時点の到着予定時刻(ETA)をグラフィックで表示し、現時点ETA値および選択したRTA時刻許容値に関連するRTAの値をグラフィックで表示し、乗物の最高速の現時点の速度限界を使用して乗物が所定の中間地点に到達することができる最先時刻をグラフィックで表示するように構成された到着要求時刻(RTA)表示指示器が含まれる。RTA表示指示器は、乗物の最低速の現時点の速度限界を使用して乗物が所定の中間地点に到達することができる最終時刻をグラフィックで表示し、選択したRTA時刻許容値内に乗物が中間地点に達することができることへの不確実性をグラフィックで表示するようにさらに構成される。
【0007】
図1〜7は、本明細書で説明する方法およびシステムの例示的実施形態を示す。
【図面の簡単な説明】
【0008】
【図1】本発明の例示的実施形態によるグラフィック表示器の図である。
【図2】本発明の例示的実施形態による、図1に示されたRTAグラフィックの表示の図である。
【図3】図2に示されたRTA時刻インジケータがRTA許容度の外にあることを示している図1に示されたRTAグラフィックの表示の図である。
【図4】予測ETA不確実性の増加を示している図1に示されたRTAグラフィックの表示の図である。
【図5】本発明の例示的実施形態によるマップモードで示された水平位置表示の図である。
【図6】本発明の例示的実施形態による図5に示された水平位置表示の一部を広げた拡大図である。
【図7】許容範囲を外れた状態を示しているマップモードで示された水平位置表示の図である。
【発明を実施するための形態】
【0009】
以下の詳細な説明は、限定としてではなく例として本発明の実施形態を示す。本発明は、所定の中間地点の到着に関して乗物の遂行能力を決定し、その遂行能力を工業、商業、および住宅応用例において乗物オペレータの都合のよい視野内に人間工学的に表示する解析的、組織的な実施形態に応用されることが意図されている。
【0010】
本明細書で使用されるとき、単数で記載され、「a」または「an」という語に続く要素またはステップは、複数の要素またはステップの除外が明確に記載されない限り、複数の要素またはステップを除外しないものと理解されるべきである。さらに、本発明の「一実施形態」への言及は、記載された特徴を同様に組み込む追加の実施形態の存在を除外すると解釈されるべきものではない。
【0011】
一般に、航空機は、3次元で、すなわち緯度、経度、および高度で制御される。航法性能要件(RNP)での進歩からも明らかなように、3次元での広範囲な運航経験がある。航空機搭乗員のための航法遂行能力の表示は、当該RNPの遵守が容易に可視化され、運航が当該RNPに従わないとき適切な警報が与えられるように開発されている。
【0012】
第4の次元の時間で航空機を制御することが最近より一般化してきている。空域管理の進歩は、各航空機の着陸時刻が予め指定され、各航空機が航路に沿った中間地点の到着を指定時刻に制御することができるとき、より多くの航空機に対する受け入れ能力の向上を示している。各航空機が最大限の燃料最適飛行プロファイルを使用して所望の着陸時刻を決定できる場合、経済的利益がさらにもたらされる。所望の着陸時刻に近い着陸時刻を指定することによって、各航空機は燃料を節約し、ならびにより多くの航空機を着陸させる受け入れ能力を向上させる。この運航の方法は到着要求時刻(RTA)と呼ばれる。
【0013】
前方視野に時刻制御遂行能力を表示する方法は、飛行中のRTA遵守をモニタするのに重要なパラメータのグラフィック図を含む「クロック」タイプ表示を使用する。それは十分にコンパクトであり、別個の機器としてパイロットの主要視野内に配置される。最近の飛行デッキでは、表示は主飛行表示器上にグラフィック画像として組み込むことができる。航路沿い「RTA時刻ボックス」が、マップモードの場合水平位置表示に付け加えられる。
【0014】
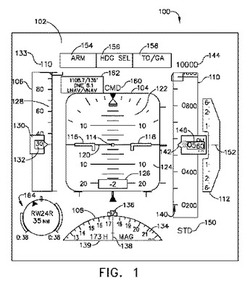
図1は、本発明の例示的実施形態によるグラフィック表示器100である。例示的実施形態において、表示器100は、航空機(図示せず)のコックピット(図示せず)で見いだすことができる主飛行表示器(PFD)である。さらに、例示的実施形態では、表示器100は、例えば、陰極線管(CRT)画面、固体表示画面、または本明細書で説明するように機能することができる他の表示画面上に示された表示フィールド102を含む。表示フィールド102は、例えば、限定はしないが、テキスト、グラフィックス、アニメーション、アイコン、およびソフトキーを表示するために表示プロセッサ(図1には図示せず)によって制御される。様々な実施形態では、表示器100はタッチ対応画面を含む。
【0015】
表示フィールド102は、複数の指示器または指示エリア104、106、108、110、および112に分割される。第1のエリア104は、ボアサイトボックス114の中央に航空機長手軸を示す中央ボアサイトボックス114を有する、形状が実質的に長方形である中心に配置された電子姿勢インジケータを含む。その両側に、従来の静止航空機記号116および118がある。人工水平が、空を表す上部の明るい陰影エリア122と、地表陰影の下部の暗いエリア124との間のライン120によって与えられる。さらに、エリア124は、地表の上の航空機の現時点の高さを表示する無線または(レーダ)高度のデジタル読出し部126を含む。
【0016】
姿勢指示器104に隣接し、それの左手側に沿って対気速度計106があり、その対気速度計106はそれの右側に沿って、すなわち姿勢指示器104に隣接する側に対気速度値を表す垂直方向に移動可能な目盛128、または目盛り付けを有する「テープ」を含む。対気速度計106は、対気速度目盛128に向かって、ならびに姿勢指示器104の中央に向かって内側に指し示す固定ポインタ130をさらに含む。ポインタ130は、航空機の計測器に応じて対気速度をデジタルで示すウィンドウ132を備える。対気速度が変化するとき、目盛128はボアサイトボックス114に向かって指し示し続けるポインタ130に対して垂直に移動する。目盛128は現時点の速度値の上下の速度値の範囲を示す。選択した対気速度の現時点の値が対気速度提示部の上の場所133で数値により表示される。
【0017】
方位計108は、観察者が容易に理解できる円形または羅針図の一部の形状を有するラスタ陰影エリアを含む。方位計108はその上部の円弧状部分に沿って度目盛(degree scale)を姿勢指示器104に隣接して備え、前に説明した対気速度計106のように、方位計108の目盛134は固定ポインタ136を基準として移動する。固定ポインタ136の下に、方位計108は、航路が機首方位と連係して変化するにつれて移動する航路インジケータ138を含む。ポインタ136の左側に、現時点の機首方位をデジタルで表示する場所139がある。
【0018】
高度計110は姿勢指示器の右手側に隣接して配置され、その左手側に沿って姿勢指示器104に隣接して高度目盛140を備える。高度計110は、目盛上の適切な指標の右に高度数値をさらに備える。高度計110は可動目盛タイプであり、目盛140は航空機の高度が変化するにつれて固定ポインタ142を基準として移動し、選択した高度の現時点の値が高度計110の上の場所144に数値で表示される。固定ポインタ142は、正確な高度が回転数字式でデジタルで表示される隣接のウィンドウ146を含む。したがって、航空機計測器からの高度情報が変化するにつれて、それに応じてウィンドウ146内の数字指標および下にある目盛140の位置の両方が変化する。高度計110の下端の位置150におけるデジタル読出しは水銀のインチ単位で設定した気圧を表す。
【0019】
表示フィールド102は、さらに、その左手側に沿って高度計110に隣接して数千フィート/分で較正された垂直速度計112を含む。垂直速度計112を含む陰影エリアは、形状がほぼ台形であり、高度計110に向かって広くなり、垂直速度計112の左手側に沿った目盛の指標を指し示すことによって航空機の現時点の垂直速度を表示するように構成された可動ポインタ152を備える。
【0020】
表示フィールド102は、さらに、表示部の中央上部に飛行モードアナンシエータ読出し部154、156、および158を含む。3つの欄は、自動スロットル状態、横方向モード状態、および垂直モード状態のために確保される。飛行指揮者、オートパイロット、および自動着陸状態の通知が姿勢指示器中央の直上の場所160に表示される。さらに、場所162は、局周波数および滑走路機首方位(度単位)を含む進入路の特性、海里単位の距離測定装置(DME)読出し、および現時点のモード状態を含む。
【0021】
表示フィールド102は、表示フィールド102の下部左手隅に位置決めされた到着要求時刻(RTA)グラフィック164をさらに含む。RTAグラフィック164は、航空機の時刻制御遂行能力を前方視野で表示するのに使用され、図2に示されるような「クロック」タイプ表示を使用する。クロックタイプ表示がこの非限定の例で示されているが、他の直線またはアーチ形の表示タイプも想定される。RTAグラフィック164は、飛行中のRTA遵守をモニタするための重要なパラメータのグラフィック図を含む。RTAグラフィック164は、RTAモードがアクティブであり、作動中のときだけ、表示フィールド102で目に見える。例示的実施形態において、RTAグラフィック164は十分にコンパクトであり、別個の機器としてパイロットの主要視野内に位置決めされる。
【0022】
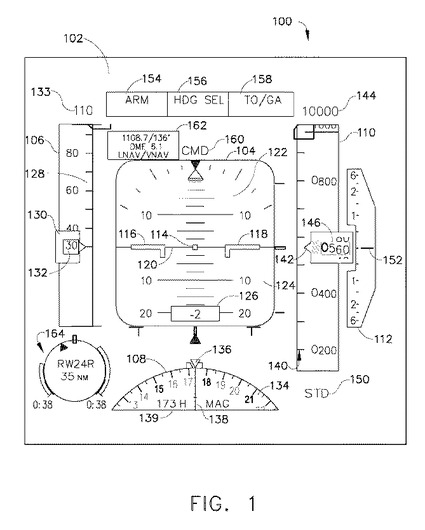
図2は、本発明の例示的実施形態によるRTAグラフィック164の表示である。例示的実施形態において、RTAグラフィック164は、搭乗員が入力するか、または別のシステムまたは場所からアップリンクすることができるRTA中間地点名称表示202を含む。中間地点は、要求通過時刻が指定されるときの位置に対応する。RTA時刻インジケータ204は搭乗員入力またはアップリンクすることができ、例えば、グラフィック164の円周目盛205上の時間:分:秒GTMで表された要求通過時刻を表示する。目盛205の各端部におけるRTA許容度206は、分:秒で表された定刻と見なされる許容のプラスマイナス通過時刻許容度に対応する。現時点ETA表示208はRTA中間地点202の計算到着予定時刻を表す。最先時刻表示210は航空機限界内の最高速許容速度を使用することによる計算最短到着時刻を表す。最先時刻表示210はRTA許容度206から現時点ETA表示208の方に距離を延ばすバーによって表され、その距離は航空機速度限界が変化するとき変化する。最終時刻表示212は航空機限界内の最低速許容速度を使用することによる計算最遅到着時刻を表す。最終時刻表示212はRTA許容度206から現時点ETA表示208の方に距離を延ばすバーによって表され、その距離は航空機速度限界が変化するとき変化する。予測ETA不確実性213は、95%の信頼水準をもたらすETA予測誤差の標準偏差の2倍の計算値を表す。予測ETA不確実性213は、グラフィック164の各側の近似的RTA許容度206から現時点ETA表示208の方に、予測ETA不確実性213の値と等しい距離を周辺に延びる太い帯としてグラフィック164上に表される。RTA中間地点214までの距離はRTA中間地点202に達するための計算した航路に沿った距離を表す。
【0023】
現時点ETA表示208は「クロック」ダイヤルの中央上部に示される。現時点ETA表示208からマイナス120度の第1の目盛ライン216、およびプラス120度の第2の目盛ライン218で示されたダイヤルの目盛りは、RTA操作に許容される時刻許容度によって決定される。これはRTA許容度206に等しく、それはRTA中間地点表示214までの距離に調整された搭乗員入力またはアップリンクのRTA許容値と等しくすることができる。目盛は、進むべき距離が大きい場合プラスマイナス120秒の最大値を有し、距離が小さくなるとプラスマイナスの搭乗員入力またはアップリンクのRTA許容値206まで減少する。
【0024】
RTA中間地点名称表示202はRTAグラフィック164の中央に示される。名称の直下に、RTA中間地点214までの距離が表示される。RTA時刻インジケータ204は色付きの「バグ」、例えば塗りつぶした三角形記号として示され、それは現時点ETA表示208およびプラスマイナスRTA許容度206に関連する値に応じてダイヤルのまわりを回転する。RTA時刻インジケータ204の位置は、目盛の中央上部で航空機の予測時刻を表す固定ダイヤルに対して時間領域での航路沿い中間地点の場所に位置決めされる。ダイヤルを左から右まで読むとき、航空機の時刻遅れは左側であり、航空機の時刻進みは右側である。図2に示されるように、現時点ETA表示208はRTA時刻インジケータ204よりわずかに進んでおり、航空機はわずかに早いが、十分に目盛の端部のRTA許容度206内にあることを示している。
【0025】
ダイヤルのまわりのバー220および222は、それぞれ、航空機操作限界によって決定されるときにRTA中間地点表示202で航空機が得ることができる最先時刻表示210および最終時刻表示212を表す。バー220および222は、そのような時刻が現時点ETA表示208プラスまたはマイナスRTA許容度206以内にある場合に単に表示される。航空機の速度限界を超えることなしに、現時点ETA表示208プラスまたはマイナスRTA許容度206を達成することがもはやできない場合、バー220および222は表示されない。
【0026】
運航中、RTA中間地点202の値を入力すると、デフォルトのコスト最適飛行プロファイルを使用してRTA時刻インジケータ204が予測ETAに等しくなってオペレータに示される。これは、飛行の最小コストプロファイルを使用する所望の到着時刻である。オペレータは、航空交通管制によって指定されることがある新しい値を入力することによってプロンプト値を変更することができる。その結果として生じるRTA速度目標は、オートパイロットにアクティブ速度命令として供給され、主飛行表示器に表示される。目標速度は適用可能速度制限によって無効にされることがある。制限速度は、到着予定時刻を計算するとき考慮に入れられる。アクティブ速度命令に従うことによって、そうすることが航空機速度限界内である場合、航空機はRTAを達成するはずである。
【0027】
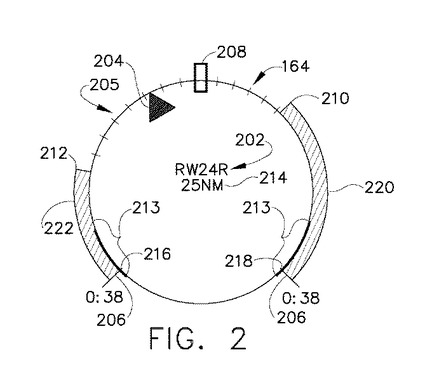
図3は、RTA時刻インジケータ204がRTA許容度206の外にあることを示しているRTAグラフィック164の表示である。例示的実施形態において、時刻インジケータ204の三角形記号RTAは、RTAグラフィック164の「遅い」側の最大目盛指示の丁度外側に置かれている。オペレータにこの状態を警告するために、三角形記号は塗りつぶし色付き記号から塗りつぶしなし記号に変わり、10秒間閃光を発する。テキストメッセージエリア302は、三角形記号が目盛の右側に置かれる場合にLATE、三角形記号が目盛の左側に置かれる場合にEARLYを表示する。不適合の量が、さらに、時間:分:秒のフォーマットでテキストメッセージエリア302に示される。
【0028】
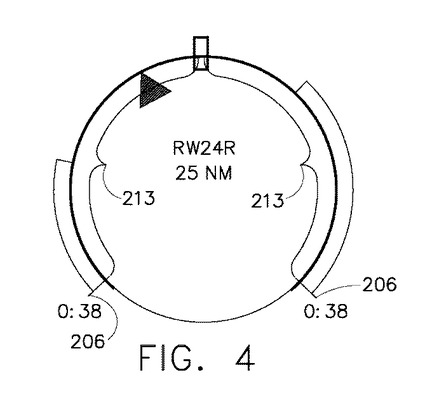
図4は、予測ETA不確実性213の増加を示すRTAグラフィック164の表示である。現時点ETAは、現時点の航空機状態と、残りの飛行経路に沿って予測した状態とに基づいて計算される。ETAを計算するのに使用される支配的状態にはいくつかのあり得る誤差があり、それがある不確実性をもたらす。例えば、水平位置不確実性は、到着時刻不確実性に直接変換される航路に沿った成分を有する。別の例では、航空機より前方の予測の風データの不確実性がある。ETA計算誤差の一因になる要因の各々に対して誤差モデルが与えられれば、複合ETA不確実性を計算することが可能である。ETA不確実性は、計算されたETAが95%の確率で含まれる全誤差である。一般に、これはETA不確実性の標準偏差の2倍である。
【0029】
例示的実施形態では、予測ETA不確実性213はRTA許容度206に比べて増加しており、したがって、予測ETA不確実性213を表す太い帯は、ダイヤル内で中央の円弧状帯域まで充満し、所定の色に変化し、10秒間閃光を発する。図4に示されるように、太い帯は、目盛205の最初から最後まで実質的に連続的な円弧内を延び、ETA不確実性が高いために95%の確率内でRTA時刻制約を満たすことがもはやできないことを示している。
【0030】
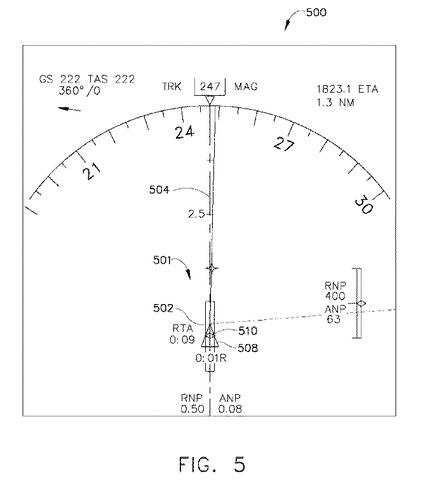
図5は、本発明の例示的実施形態によるマップモードで示された水平位置表示500の図である。例示的実施形態では、RTA遂行能力目盛のマップ表示501は、水平位置表示500の中央に隣接し、航空機アイコン508の首線504に沿って表示される。マップ表示501は、航路沿いRTA時刻ボックス502と、現時点ETA菱形510とを含み、現時点ETA表示208を表す。RTA時刻ボックス502、航空機アイコン508、および現時点ETA菱形510の相対位置と、RTA時刻ボックス502のサイズとは、航空機のRTA遂行能力のグラフィック指示を実時刻で表す。RTAモードが結合され、アクティブであるときだけ、RTA時刻ボックス502および現時点ETA菱形510が目に見える。
【0031】
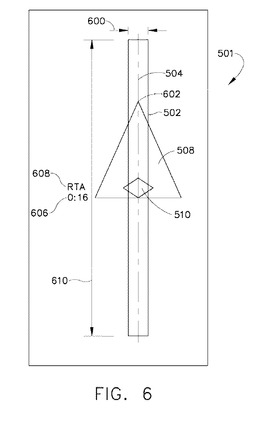
図6は、本発明の例示的実施形態による水平位置表示500の一部を広げた拡大図である。水平位置表示500がマップモードである場合、マップ表示501が水平位置表示500上に示される。マップの目盛はオペレータによって選択された地理的距離に基づくので、RTA時刻ボックス502の場所および航路沿いサイズは、時間と対地速度を乗算することによって距離に変換される。RTA時刻ボックス502の幅600は表示上で固定される。航空機アイコン508の上部頂点602によって示された航空機の機首は現時点ETA表示208に対応する。RTA時刻ボックス502の中央に、RTA時刻インジケータ204の値に対応する現時点ETA菱形510がある。RTA時刻ボックス502の中央は、航空機の機首の前または後ろの(現時点ETA表示208−RTA時刻表示器204)×対地速度の距離に配置される。現時点ETA菱形510の位置は、その場所での航空機のETAを表す航空機の機首に対する時間領域での所望の航路沿い中間地点の場所を表す。時間:分:秒で時刻誤差606を示すために、差のRTA−ETAがRTA時刻ボックス502に隣接するヘッダRTA608の下に示される。
【0032】
RTA許容度206を使用して、航空機の航路に沿ってRTA時刻ボックス502の長さ610を計算する。長さ610は、RTA許容度206と対地速度を乗算することによって決定される。航空機アイコン508の上部頂点602によって表された航空機の機首がRTA時刻ボックス内にある限り、航空機は時間通りである。
【0033】
RTA時刻インジケータ204がRTA許容度206の外にある場合、航空機アイコン508の上部頂点602によって表された航空機の機首はRTA時刻ボックス502の外にあり、RTA時刻誤差606は、RTA時刻インジケータ204がRTA許容度206の外にあることをオペレータに警告する例えば琥珀色になる。LATE状態の一例は、航空機の前方にRTA時刻ボックス502を示すことになる。
【0034】
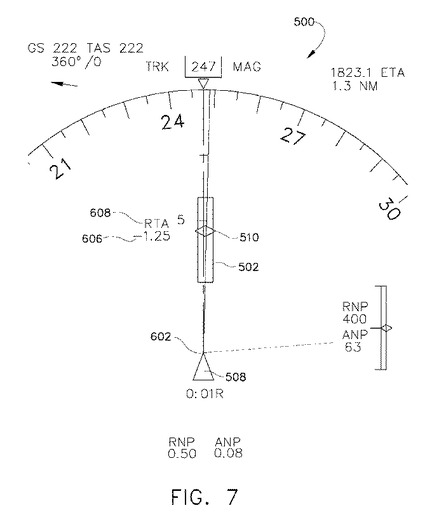
図7は、許容範囲を外れた状態を示しているマップモードで示された水平位置表示500の図である。例示的実施形態では、頂点602によって表された航空機の機首はRTA時刻ボックス502の外にあり、RTA時刻誤差606およびヘッダ608は、RTA時刻が時刻許容度から外れていることをオペレータに警告する琥珀色になる。RTA時刻ボックス502が航空機アイコン508によって表された航空機の前方にあるLATE状態の一例が示されている。
【0035】
本明細書で使用されるプロセッサという用語は、中央処理装置、マイクロプロセッサ、マイクロコントローラ、縮小命令セット回路(RISC)、特定用途向け集積回路(ASIC)、論理回路、および本明細書で説明した機能を実行することができる他の回路またはプロセッサを指す。
【0036】
本明細書で使用される「ソフトウェア」および「ファームウェア」という用語は交換可能であり、RAMメモリ、ROMメモリ、EPROMメモリ、EEPROMメモリ、および不揮発性RAM(NVRAM)メモリを含む、プロセッサによる実行のためにメモリに記憶された任意のコンピュータプログラムを含む。上述のメモリタイプは単なる例示であり、したがって、コンピュータプログラムの記憶に使用可能なメモリのタイプに関して限定するものではない。
【0037】
本開示の上述の実施形態は、コンピュータソフトウェア、ファームウェア、ハードウェア、またはそれらの任意の組合せもしくはサブセットを含むコンピュータプログラミングまたはエンジニアリング技法を使用して実施することができ、技術的効果は、所定の時刻に所定の中間地点に乗物が到着することに関する乗物の遂行能力を示すグラフィック前方視野表示を乗物オペレータに提供することである。コンピュータ可読コード手段を有する任意のそのような結果としてのプログラムは、本開示の説明した実施形態により、1つまたは複数のコンピュータ可読媒体内に組み入れられ、または供給され、それによって、コンピュータプログラム製品、すなわち製造品を製作することができる。コンピュータ可読媒体は、例えば、限定はしないが、固定(ハード)ドライブ、ディスケット、光ディスク、磁気テープ、読取り専用メモリ(ROM)などの半導体メモリ、および/またはインターネットまたは他の通信ネットワークもしくはリンクなどの任意の送信/受信媒体とすることができる。コンピュータコードを含む製造品は、1つの媒体からコードを直接実行することによって、ある媒体から別の媒体にコードをコピーすることによって、またはネットワークを介してコードを送信することによって製作および/または使用することができる。
【0038】
乗物のための到着要求時刻(RTA)表示を表示する方法およびシステムの上述の実施形態は、限定はしないが、飛行管理コンピュータシステム(FMCS)およびコックピット表示システム(CDS)などの現代の航空機の既存の装置に、ソフトウェア強化を実施するための費用効果が高く信頼できる手段を提供する。より具体的には、本明細書で説明した方法およびシステムは、所定の中間地点位置および中間地点の到着要求時刻を基準にして、時間および空間における乗物位置に関連する情報を受け取りやすくする。さらに、上述の方法およびシステムは、前方視野において乗物オペレータにRTA情報を人間工学的に表示しやすくする。その結果、本明細書で説明した方法およびシステムは、費用効果が高く信頼できる方法で乗物を操作しやすくする。
【0039】
本開示は様々な特定の実施形態に関して説明されているが、本開示は特許請求の範囲の趣旨および範囲内で変更を加えて実施することができることが認識されよう。
【符号の説明】
【0040】
100 グラフィック表示器
102 表示フィールド
104 指示エリア、第1のエリア、姿勢指示器
106 指示エリア、対気速度計
108 指示エリア、方位計
110 指示エリア、高度計
112 垂直速度計
114 ボアサイトボックス
116、118 静止航空機記号
120 ライン
122 上部の明るい陰影エリア
124 下部の暗いエリア
126 無線または(レーダ)高度のデジタル読出し部
128 対気速度目盛
130 固定ポインタ
132 ウィンドウ
133 対気速度提示部の上の場所
134 方位計の目盛
136 固定ポインタ
138 航路インジケータ
139 機首方位を表示する場所
140 高度目盛
142 固定ポインタ
144 高度指示器の上の場所
146 ウィンドウ
150 高度指示器の下端の位置
152 可動ポインタ
154、156、158 飛行モードアナンシエータ読出し部
160 姿勢指示器中央の直上の場所
162 場所
164 到着要求時刻(RTA)グラフィック
202 RTA中間地点名称表示
204 RTA時刻インジケータ
205 円周目盛
206 RTA許容度
208 現時点ETA表示
210 最先時刻表示
212 最終時刻表示
213 予測ETA不確実性
214 RTA中間地点
216 第1の目盛ライン
218 第2の目盛ライン
220、222 バー
302 テキストメッセージエリア
500 水平位置表示
501 マップ表示
502 RTA時刻ボックス
504 首線
508 航空機アイコン
510 現時点ETA菱形
600 RTA時刻ボックスの幅
602 航空機アイコンの上部頂点
606 RTA時刻誤差
608 ヘッダRTA
610 RTA時刻ボックスの長さ
【技術分野】
【0001】
本発明は一般に乗物航法および誘導システムに関し、より詳細には、到着要求時刻に対処するための乗物の遂行能力を表示する方法およびシステムに関する。
【背景技術】
【0002】
少なくともいくつかの既知の乗物、特に航空機は対応する所定の時刻に航路に沿った特定の位置に到着するように制御される。そのような到着要求時刻の制御により、共通空域を使用する航空交通量を増加させることができる。現時点の運航において、航空機搭乗員は、中央ペデスタルエリアに取り付けられた制御表示ユニット上の数値表示を見ることによって到着要求時刻(RTA)追従をモニタすることができる。しかし、パイロットの前方視野の外側の数値表示は、パイロットが多くの努力をすることなしには読み取りおよび解釈するのが困難である。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】米国特許第2003/139876号
【発明の概要】
【課題を解決するための手段】
【0004】
一実施形態では、到着要求時刻(RTA)遂行能力グラフィック表示のシステムは、到着要求時刻に関連する所定のパラメータを受け取るようにプログラムされたプロセッサと、プロセッサに通信可能に結合された第1の視覚表示器とを含む。第1の視覚表示器は、軸のまわりに実質的に対称なダイヤルを有するRTAグラフィックと、所定の中間地点の現時点の到着予定時刻(ETA)を示す第1のマーカと、現時点ETA値および選択したRTA時刻許容値に関連するRTAの値を示す第2のマーカと、乗物が所定の中間地点に到達することができる最先時刻を表す第1の指示と、乗物が所定の中間地点に到達することができる最終時刻を表す第2の指示と、早い到着方向におけるETAの不確実性を表す第3の指示と、遅い到着方向におけるETAの不確実性を表す第4の指示とを含む。
【0005】
別の実施形態では、到着要求時刻(RTA)遂行能力を表示する方法は、中間地点の位置情報、中間地点の乗物の到着要求時刻(RTA)、RTAに関する許容度、および中間地点の到着予定時刻(ETA)を含む中間地点情報を受け取るステップと、ETAを基準としてRTAをグラフィックで表示するステップとを含む。
【0006】
さらなる別の実施形態では、グラフィック表示画面を含む前方視野表示システムが提供される。グラフィック表示画面は複数の指示エリアを含み、少なくとも1つの指示エリアには、所定の中間地点の現時点の到着予定時刻(ETA)をグラフィックで表示し、現時点ETA値および選択したRTA時刻許容値に関連するRTAの値をグラフィックで表示し、乗物の最高速の現時点の速度限界を使用して乗物が所定の中間地点に到達することができる最先時刻をグラフィックで表示するように構成された到着要求時刻(RTA)表示指示器が含まれる。RTA表示指示器は、乗物の最低速の現時点の速度限界を使用して乗物が所定の中間地点に到達することができる最終時刻をグラフィックで表示し、選択したRTA時刻許容値内に乗物が中間地点に達することができることへの不確実性をグラフィックで表示するようにさらに構成される。
【0007】
図1〜7は、本明細書で説明する方法およびシステムの例示的実施形態を示す。
【図面の簡単な説明】
【0008】
【図1】本発明の例示的実施形態によるグラフィック表示器の図である。
【図2】本発明の例示的実施形態による、図1に示されたRTAグラフィックの表示の図である。
【図3】図2に示されたRTA時刻インジケータがRTA許容度の外にあることを示している図1に示されたRTAグラフィックの表示の図である。
【図4】予測ETA不確実性の増加を示している図1に示されたRTAグラフィックの表示の図である。
【図5】本発明の例示的実施形態によるマップモードで示された水平位置表示の図である。
【図6】本発明の例示的実施形態による図5に示された水平位置表示の一部を広げた拡大図である。
【図7】許容範囲を外れた状態を示しているマップモードで示された水平位置表示の図である。
【発明を実施するための形態】
【0009】
以下の詳細な説明は、限定としてではなく例として本発明の実施形態を示す。本発明は、所定の中間地点の到着に関して乗物の遂行能力を決定し、その遂行能力を工業、商業、および住宅応用例において乗物オペレータの都合のよい視野内に人間工学的に表示する解析的、組織的な実施形態に応用されることが意図されている。
【0010】
本明細書で使用されるとき、単数で記載され、「a」または「an」という語に続く要素またはステップは、複数の要素またはステップの除外が明確に記載されない限り、複数の要素またはステップを除外しないものと理解されるべきである。さらに、本発明の「一実施形態」への言及は、記載された特徴を同様に組み込む追加の実施形態の存在を除外すると解釈されるべきものではない。
【0011】
一般に、航空機は、3次元で、すなわち緯度、経度、および高度で制御される。航法性能要件(RNP)での進歩からも明らかなように、3次元での広範囲な運航経験がある。航空機搭乗員のための航法遂行能力の表示は、当該RNPの遵守が容易に可視化され、運航が当該RNPに従わないとき適切な警報が与えられるように開発されている。
【0012】
第4の次元の時間で航空機を制御することが最近より一般化してきている。空域管理の進歩は、各航空機の着陸時刻が予め指定され、各航空機が航路に沿った中間地点の到着を指定時刻に制御することができるとき、より多くの航空機に対する受け入れ能力の向上を示している。各航空機が最大限の燃料最適飛行プロファイルを使用して所望の着陸時刻を決定できる場合、経済的利益がさらにもたらされる。所望の着陸時刻に近い着陸時刻を指定することによって、各航空機は燃料を節約し、ならびにより多くの航空機を着陸させる受け入れ能力を向上させる。この運航の方法は到着要求時刻(RTA)と呼ばれる。
【0013】
前方視野に時刻制御遂行能力を表示する方法は、飛行中のRTA遵守をモニタするのに重要なパラメータのグラフィック図を含む「クロック」タイプ表示を使用する。それは十分にコンパクトであり、別個の機器としてパイロットの主要視野内に配置される。最近の飛行デッキでは、表示は主飛行表示器上にグラフィック画像として組み込むことができる。航路沿い「RTA時刻ボックス」が、マップモードの場合水平位置表示に付け加えられる。
【0014】
図1は、本発明の例示的実施形態によるグラフィック表示器100である。例示的実施形態において、表示器100は、航空機(図示せず)のコックピット(図示せず)で見いだすことができる主飛行表示器(PFD)である。さらに、例示的実施形態では、表示器100は、例えば、陰極線管(CRT)画面、固体表示画面、または本明細書で説明するように機能することができる他の表示画面上に示された表示フィールド102を含む。表示フィールド102は、例えば、限定はしないが、テキスト、グラフィックス、アニメーション、アイコン、およびソフトキーを表示するために表示プロセッサ(図1には図示せず)によって制御される。様々な実施形態では、表示器100はタッチ対応画面を含む。
【0015】
表示フィールド102は、複数の指示器または指示エリア104、106、108、110、および112に分割される。第1のエリア104は、ボアサイトボックス114の中央に航空機長手軸を示す中央ボアサイトボックス114を有する、形状が実質的に長方形である中心に配置された電子姿勢インジケータを含む。その両側に、従来の静止航空機記号116および118がある。人工水平が、空を表す上部の明るい陰影エリア122と、地表陰影の下部の暗いエリア124との間のライン120によって与えられる。さらに、エリア124は、地表の上の航空機の現時点の高さを表示する無線または(レーダ)高度のデジタル読出し部126を含む。
【0016】
姿勢指示器104に隣接し、それの左手側に沿って対気速度計106があり、その対気速度計106はそれの右側に沿って、すなわち姿勢指示器104に隣接する側に対気速度値を表す垂直方向に移動可能な目盛128、または目盛り付けを有する「テープ」を含む。対気速度計106は、対気速度目盛128に向かって、ならびに姿勢指示器104の中央に向かって内側に指し示す固定ポインタ130をさらに含む。ポインタ130は、航空機の計測器に応じて対気速度をデジタルで示すウィンドウ132を備える。対気速度が変化するとき、目盛128はボアサイトボックス114に向かって指し示し続けるポインタ130に対して垂直に移動する。目盛128は現時点の速度値の上下の速度値の範囲を示す。選択した対気速度の現時点の値が対気速度提示部の上の場所133で数値により表示される。
【0017】
方位計108は、観察者が容易に理解できる円形または羅針図の一部の形状を有するラスタ陰影エリアを含む。方位計108はその上部の円弧状部分に沿って度目盛(degree scale)を姿勢指示器104に隣接して備え、前に説明した対気速度計106のように、方位計108の目盛134は固定ポインタ136を基準として移動する。固定ポインタ136の下に、方位計108は、航路が機首方位と連係して変化するにつれて移動する航路インジケータ138を含む。ポインタ136の左側に、現時点の機首方位をデジタルで表示する場所139がある。
【0018】
高度計110は姿勢指示器の右手側に隣接して配置され、その左手側に沿って姿勢指示器104に隣接して高度目盛140を備える。高度計110は、目盛上の適切な指標の右に高度数値をさらに備える。高度計110は可動目盛タイプであり、目盛140は航空機の高度が変化するにつれて固定ポインタ142を基準として移動し、選択した高度の現時点の値が高度計110の上の場所144に数値で表示される。固定ポインタ142は、正確な高度が回転数字式でデジタルで表示される隣接のウィンドウ146を含む。したがって、航空機計測器からの高度情報が変化するにつれて、それに応じてウィンドウ146内の数字指標および下にある目盛140の位置の両方が変化する。高度計110の下端の位置150におけるデジタル読出しは水銀のインチ単位で設定した気圧を表す。
【0019】
表示フィールド102は、さらに、その左手側に沿って高度計110に隣接して数千フィート/分で較正された垂直速度計112を含む。垂直速度計112を含む陰影エリアは、形状がほぼ台形であり、高度計110に向かって広くなり、垂直速度計112の左手側に沿った目盛の指標を指し示すことによって航空機の現時点の垂直速度を表示するように構成された可動ポインタ152を備える。
【0020】
表示フィールド102は、さらに、表示部の中央上部に飛行モードアナンシエータ読出し部154、156、および158を含む。3つの欄は、自動スロットル状態、横方向モード状態、および垂直モード状態のために確保される。飛行指揮者、オートパイロット、および自動着陸状態の通知が姿勢指示器中央の直上の場所160に表示される。さらに、場所162は、局周波数および滑走路機首方位(度単位)を含む進入路の特性、海里単位の距離測定装置(DME)読出し、および現時点のモード状態を含む。
【0021】
表示フィールド102は、表示フィールド102の下部左手隅に位置決めされた到着要求時刻(RTA)グラフィック164をさらに含む。RTAグラフィック164は、航空機の時刻制御遂行能力を前方視野で表示するのに使用され、図2に示されるような「クロック」タイプ表示を使用する。クロックタイプ表示がこの非限定の例で示されているが、他の直線またはアーチ形の表示タイプも想定される。RTAグラフィック164は、飛行中のRTA遵守をモニタするための重要なパラメータのグラフィック図を含む。RTAグラフィック164は、RTAモードがアクティブであり、作動中のときだけ、表示フィールド102で目に見える。例示的実施形態において、RTAグラフィック164は十分にコンパクトであり、別個の機器としてパイロットの主要視野内に位置決めされる。
【0022】
図2は、本発明の例示的実施形態によるRTAグラフィック164の表示である。例示的実施形態において、RTAグラフィック164は、搭乗員が入力するか、または別のシステムまたは場所からアップリンクすることができるRTA中間地点名称表示202を含む。中間地点は、要求通過時刻が指定されるときの位置に対応する。RTA時刻インジケータ204は搭乗員入力またはアップリンクすることができ、例えば、グラフィック164の円周目盛205上の時間:分:秒GTMで表された要求通過時刻を表示する。目盛205の各端部におけるRTA許容度206は、分:秒で表された定刻と見なされる許容のプラスマイナス通過時刻許容度に対応する。現時点ETA表示208はRTA中間地点202の計算到着予定時刻を表す。最先時刻表示210は航空機限界内の最高速許容速度を使用することによる計算最短到着時刻を表す。最先時刻表示210はRTA許容度206から現時点ETA表示208の方に距離を延ばすバーによって表され、その距離は航空機速度限界が変化するとき変化する。最終時刻表示212は航空機限界内の最低速許容速度を使用することによる計算最遅到着時刻を表す。最終時刻表示212はRTA許容度206から現時点ETA表示208の方に距離を延ばすバーによって表され、その距離は航空機速度限界が変化するとき変化する。予測ETA不確実性213は、95%の信頼水準をもたらすETA予測誤差の標準偏差の2倍の計算値を表す。予測ETA不確実性213は、グラフィック164の各側の近似的RTA許容度206から現時点ETA表示208の方に、予測ETA不確実性213の値と等しい距離を周辺に延びる太い帯としてグラフィック164上に表される。RTA中間地点214までの距離はRTA中間地点202に達するための計算した航路に沿った距離を表す。
【0023】
現時点ETA表示208は「クロック」ダイヤルの中央上部に示される。現時点ETA表示208からマイナス120度の第1の目盛ライン216、およびプラス120度の第2の目盛ライン218で示されたダイヤルの目盛りは、RTA操作に許容される時刻許容度によって決定される。これはRTA許容度206に等しく、それはRTA中間地点表示214までの距離に調整された搭乗員入力またはアップリンクのRTA許容値と等しくすることができる。目盛は、進むべき距離が大きい場合プラスマイナス120秒の最大値を有し、距離が小さくなるとプラスマイナスの搭乗員入力またはアップリンクのRTA許容値206まで減少する。
【0024】
RTA中間地点名称表示202はRTAグラフィック164の中央に示される。名称の直下に、RTA中間地点214までの距離が表示される。RTA時刻インジケータ204は色付きの「バグ」、例えば塗りつぶした三角形記号として示され、それは現時点ETA表示208およびプラスマイナスRTA許容度206に関連する値に応じてダイヤルのまわりを回転する。RTA時刻インジケータ204の位置は、目盛の中央上部で航空機の予測時刻を表す固定ダイヤルに対して時間領域での航路沿い中間地点の場所に位置決めされる。ダイヤルを左から右まで読むとき、航空機の時刻遅れは左側であり、航空機の時刻進みは右側である。図2に示されるように、現時点ETA表示208はRTA時刻インジケータ204よりわずかに進んでおり、航空機はわずかに早いが、十分に目盛の端部のRTA許容度206内にあることを示している。
【0025】
ダイヤルのまわりのバー220および222は、それぞれ、航空機操作限界によって決定されるときにRTA中間地点表示202で航空機が得ることができる最先時刻表示210および最終時刻表示212を表す。バー220および222は、そのような時刻が現時点ETA表示208プラスまたはマイナスRTA許容度206以内にある場合に単に表示される。航空機の速度限界を超えることなしに、現時点ETA表示208プラスまたはマイナスRTA許容度206を達成することがもはやできない場合、バー220および222は表示されない。
【0026】
運航中、RTA中間地点202の値を入力すると、デフォルトのコスト最適飛行プロファイルを使用してRTA時刻インジケータ204が予測ETAに等しくなってオペレータに示される。これは、飛行の最小コストプロファイルを使用する所望の到着時刻である。オペレータは、航空交通管制によって指定されることがある新しい値を入力することによってプロンプト値を変更することができる。その結果として生じるRTA速度目標は、オートパイロットにアクティブ速度命令として供給され、主飛行表示器に表示される。目標速度は適用可能速度制限によって無効にされることがある。制限速度は、到着予定時刻を計算するとき考慮に入れられる。アクティブ速度命令に従うことによって、そうすることが航空機速度限界内である場合、航空機はRTAを達成するはずである。
【0027】
図3は、RTA時刻インジケータ204がRTA許容度206の外にあることを示しているRTAグラフィック164の表示である。例示的実施形態において、時刻インジケータ204の三角形記号RTAは、RTAグラフィック164の「遅い」側の最大目盛指示の丁度外側に置かれている。オペレータにこの状態を警告するために、三角形記号は塗りつぶし色付き記号から塗りつぶしなし記号に変わり、10秒間閃光を発する。テキストメッセージエリア302は、三角形記号が目盛の右側に置かれる場合にLATE、三角形記号が目盛の左側に置かれる場合にEARLYを表示する。不適合の量が、さらに、時間:分:秒のフォーマットでテキストメッセージエリア302に示される。
【0028】
図4は、予測ETA不確実性213の増加を示すRTAグラフィック164の表示である。現時点ETAは、現時点の航空機状態と、残りの飛行経路に沿って予測した状態とに基づいて計算される。ETAを計算するのに使用される支配的状態にはいくつかのあり得る誤差があり、それがある不確実性をもたらす。例えば、水平位置不確実性は、到着時刻不確実性に直接変換される航路に沿った成分を有する。別の例では、航空機より前方の予測の風データの不確実性がある。ETA計算誤差の一因になる要因の各々に対して誤差モデルが与えられれば、複合ETA不確実性を計算することが可能である。ETA不確実性は、計算されたETAが95%の確率で含まれる全誤差である。一般に、これはETA不確実性の標準偏差の2倍である。
【0029】
例示的実施形態では、予測ETA不確実性213はRTA許容度206に比べて増加しており、したがって、予測ETA不確実性213を表す太い帯は、ダイヤル内で中央の円弧状帯域まで充満し、所定の色に変化し、10秒間閃光を発する。図4に示されるように、太い帯は、目盛205の最初から最後まで実質的に連続的な円弧内を延び、ETA不確実性が高いために95%の確率内でRTA時刻制約を満たすことがもはやできないことを示している。
【0030】
図5は、本発明の例示的実施形態によるマップモードで示された水平位置表示500の図である。例示的実施形態では、RTA遂行能力目盛のマップ表示501は、水平位置表示500の中央に隣接し、航空機アイコン508の首線504に沿って表示される。マップ表示501は、航路沿いRTA時刻ボックス502と、現時点ETA菱形510とを含み、現時点ETA表示208を表す。RTA時刻ボックス502、航空機アイコン508、および現時点ETA菱形510の相対位置と、RTA時刻ボックス502のサイズとは、航空機のRTA遂行能力のグラフィック指示を実時刻で表す。RTAモードが結合され、アクティブであるときだけ、RTA時刻ボックス502および現時点ETA菱形510が目に見える。
【0031】
図6は、本発明の例示的実施形態による水平位置表示500の一部を広げた拡大図である。水平位置表示500がマップモードである場合、マップ表示501が水平位置表示500上に示される。マップの目盛はオペレータによって選択された地理的距離に基づくので、RTA時刻ボックス502の場所および航路沿いサイズは、時間と対地速度を乗算することによって距離に変換される。RTA時刻ボックス502の幅600は表示上で固定される。航空機アイコン508の上部頂点602によって示された航空機の機首は現時点ETA表示208に対応する。RTA時刻ボックス502の中央に、RTA時刻インジケータ204の値に対応する現時点ETA菱形510がある。RTA時刻ボックス502の中央は、航空機の機首の前または後ろの(現時点ETA表示208−RTA時刻表示器204)×対地速度の距離に配置される。現時点ETA菱形510の位置は、その場所での航空機のETAを表す航空機の機首に対する時間領域での所望の航路沿い中間地点の場所を表す。時間:分:秒で時刻誤差606を示すために、差のRTA−ETAがRTA時刻ボックス502に隣接するヘッダRTA608の下に示される。
【0032】
RTA許容度206を使用して、航空機の航路に沿ってRTA時刻ボックス502の長さ610を計算する。長さ610は、RTA許容度206と対地速度を乗算することによって決定される。航空機アイコン508の上部頂点602によって表された航空機の機首がRTA時刻ボックス内にある限り、航空機は時間通りである。
【0033】
RTA時刻インジケータ204がRTA許容度206の外にある場合、航空機アイコン508の上部頂点602によって表された航空機の機首はRTA時刻ボックス502の外にあり、RTA時刻誤差606は、RTA時刻インジケータ204がRTA許容度206の外にあることをオペレータに警告する例えば琥珀色になる。LATE状態の一例は、航空機の前方にRTA時刻ボックス502を示すことになる。
【0034】
図7は、許容範囲を外れた状態を示しているマップモードで示された水平位置表示500の図である。例示的実施形態では、頂点602によって表された航空機の機首はRTA時刻ボックス502の外にあり、RTA時刻誤差606およびヘッダ608は、RTA時刻が時刻許容度から外れていることをオペレータに警告する琥珀色になる。RTA時刻ボックス502が航空機アイコン508によって表された航空機の前方にあるLATE状態の一例が示されている。
【0035】
本明細書で使用されるプロセッサという用語は、中央処理装置、マイクロプロセッサ、マイクロコントローラ、縮小命令セット回路(RISC)、特定用途向け集積回路(ASIC)、論理回路、および本明細書で説明した機能を実行することができる他の回路またはプロセッサを指す。
【0036】
本明細書で使用される「ソフトウェア」および「ファームウェア」という用語は交換可能であり、RAMメモリ、ROMメモリ、EPROMメモリ、EEPROMメモリ、および不揮発性RAM(NVRAM)メモリを含む、プロセッサによる実行のためにメモリに記憶された任意のコンピュータプログラムを含む。上述のメモリタイプは単なる例示であり、したがって、コンピュータプログラムの記憶に使用可能なメモリのタイプに関して限定するものではない。
【0037】
本開示の上述の実施形態は、コンピュータソフトウェア、ファームウェア、ハードウェア、またはそれらの任意の組合せもしくはサブセットを含むコンピュータプログラミングまたはエンジニアリング技法を使用して実施することができ、技術的効果は、所定の時刻に所定の中間地点に乗物が到着することに関する乗物の遂行能力を示すグラフィック前方視野表示を乗物オペレータに提供することである。コンピュータ可読コード手段を有する任意のそのような結果としてのプログラムは、本開示の説明した実施形態により、1つまたは複数のコンピュータ可読媒体内に組み入れられ、または供給され、それによって、コンピュータプログラム製品、すなわち製造品を製作することができる。コンピュータ可読媒体は、例えば、限定はしないが、固定(ハード)ドライブ、ディスケット、光ディスク、磁気テープ、読取り専用メモリ(ROM)などの半導体メモリ、および/またはインターネットまたは他の通信ネットワークもしくはリンクなどの任意の送信/受信媒体とすることができる。コンピュータコードを含む製造品は、1つの媒体からコードを直接実行することによって、ある媒体から別の媒体にコードをコピーすることによって、またはネットワークを介してコードを送信することによって製作および/または使用することができる。
【0038】
乗物のための到着要求時刻(RTA)表示を表示する方法およびシステムの上述の実施形態は、限定はしないが、飛行管理コンピュータシステム(FMCS)およびコックピット表示システム(CDS)などの現代の航空機の既存の装置に、ソフトウェア強化を実施するための費用効果が高く信頼できる手段を提供する。より具体的には、本明細書で説明した方法およびシステムは、所定の中間地点位置および中間地点の到着要求時刻を基準にして、時間および空間における乗物位置に関連する情報を受け取りやすくする。さらに、上述の方法およびシステムは、前方視野において乗物オペレータにRTA情報を人間工学的に表示しやすくする。その結果、本明細書で説明した方法およびシステムは、費用効果が高く信頼できる方法で乗物を操作しやすくする。
【0039】
本開示は様々な特定の実施形態に関して説明されているが、本開示は特許請求の範囲の趣旨および範囲内で変更を加えて実施することができることが認識されよう。
【符号の説明】
【0040】
100 グラフィック表示器
102 表示フィールド
104 指示エリア、第1のエリア、姿勢指示器
106 指示エリア、対気速度計
108 指示エリア、方位計
110 指示エリア、高度計
112 垂直速度計
114 ボアサイトボックス
116、118 静止航空機記号
120 ライン
122 上部の明るい陰影エリア
124 下部の暗いエリア
126 無線または(レーダ)高度のデジタル読出し部
128 対気速度目盛
130 固定ポインタ
132 ウィンドウ
133 対気速度提示部の上の場所
134 方位計の目盛
136 固定ポインタ
138 航路インジケータ
139 機首方位を表示する場所
140 高度目盛
142 固定ポインタ
144 高度指示器の上の場所
146 ウィンドウ
150 高度指示器の下端の位置
152 可動ポインタ
154、156、158 飛行モードアナンシエータ読出し部
160 姿勢指示器中央の直上の場所
162 場所
164 到着要求時刻(RTA)グラフィック
202 RTA中間地点名称表示
204 RTA時刻インジケータ
205 円周目盛
206 RTA許容度
208 現時点ETA表示
210 最先時刻表示
212 最終時刻表示
213 予測ETA不確実性
214 RTA中間地点
216 第1の目盛ライン
218 第2の目盛ライン
220、222 バー
302 テキストメッセージエリア
500 水平位置表示
501 マップ表示
502 RTA時刻ボックス
504 首線
508 航空機アイコン
510 現時点ETA菱形
600 RTA時刻ボックスの幅
602 航空機アイコンの上部頂点
606 RTA時刻誤差
608 ヘッダRTA
610 RTA時刻ボックスの長さ
【特許請求の範囲】
【請求項1】
乗物のための到着要求時刻(RTA)遂行能力グラフィック表示システムであって、
到着要求時刻に関連する所定のパラメータを受け取るようにプログラムされたプロセッサと、
前記プロセッサに通信可能に結合された第1の視覚表示器であり、
軸を含むダイヤルと、
所定の中間地点の現時点の到着予定時刻(ETA)を示す第1のマーカと、
前記現時点ETA値および選択したRTA時刻許容値に関連する前記RTAの値を示す第2のマーカと、
前記乗物が前記所定の中間地点に到達することができる最先時刻を表す第1の指示と、
前記乗物が前記所定の中間地点に到達することができる最終時刻を表す第2の指示と、
早い到着方向における前記ETAの不確実性を表す第3の指示と、
遅い到着方向における前記ETAの不確実性を表す第4の指示と
を含むRTAグラフィックを含む、第1の視覚表示器と
を備えるシステム。
【請求項2】
前記ダイヤルが軸のまわりに実質的に対称である、請求項1記載のRTA表示システム。
【請求項3】
前記プロセッサに通信可能に結合された第2の視覚表示器をさらに含み、前記第2の表示器が、
前記最先時刻と前記最終時刻との間の相対時間を示す長さを含むRTA時刻ボックスと、
前記現時点ETAに対応する指標を含む乗物記号と、
前記乗物が所定の中間地点を通過するのに要求される時刻を示すRTA記号と
を含むマップモードグラフィックを含む、請求項1記載のRTA表示システム。
【請求項4】
前記第1の視覚表示器が航空機水平位置表示を含む、請求項1記載のRTA表示システム。
【請求項5】
前記マップモードグラフィックが水平位置表示上で前記乗物の首線に位置合わせされる、請求項3記載のRTA表示システム。
【請求項6】
前記RTA時刻ボックスの長さが、前記最先時刻および前記最終時刻に前記乗物の対地速度を乗算したものを使用して乗物航路に沿った距離を表す、請求項3記載のRTA表示システム。
【請求項7】
前記指標と前記RTA記号との間の差が、前記中間地点の前記乗物ETAと前記中間地点の前記RTAとの間の差を表す、請求項3記載のRTA表示システム。
【請求項8】
前記RTA時刻ボックスの外に位置決めされた前記指標の指示が、早い到着状態および遅い到着状態のうちの少なくとも一方を表す、請求項3記載のRTA表示システム。
【請求項9】
前記第1の視覚表示器が航空機主飛行表示器を含む、請求項1記載のRTA表示システム。
【請求項10】
前記ダイヤルが時間の単位で目盛り付けされた目盛を含む、請求項1記載のRTA表示システム。
【請求項11】
前記第1のマーカが前記ダイヤルの中央に位置決めされる、請求項1記載のRTA表示システム。
【請求項12】
前記第1の指示が前記ダイヤルの第1の限界から前記第1のマーカの方に延びる第1のバー指示を含み、前記第2の指示が前記目盛の第2の限界から前記第1のマーカの方に延びる第2のバー指示を含む、請求項1記載のRTA表示システム。
【請求項13】
前記第3の指示が前記目盛の第1の限界から前記第1のマーカの方に延びる第3のバー指示を含み、前記第4の指示が前記目盛の前記第2の限界から前記第1のマーカの方に延びる第4のバー指示を含む、請求項1記載のRTA表示システム。
【請求項14】
到着要求時刻(RTA)遂行能力を表示する方法であって、
中間地点の位置情報、前記中間地点の乗物の到着要求時刻(RTA)、前記RTAに関する許容度、および前記中間地点の到着予定時刻(ETA)を含む中間地点情報を受け取るステップと、
前記ETAを基準として前記RTAをグラフィックで表示するステップと
を含む方法。
【請求項15】
前記中間地点の前記ETAの不確実性をグラフィックで表示するステップをさらに含む、請求項14記載の到着要求時刻(RTA)遂行能力を表示する方法。
【請求項16】
前記中間地点の前記ETAの前記不確実性が、水平位置不確実性の航路沿い成分、および前記乗物の前方の予測の風データに起因する不確実性の少なくとも一方を含む、請求項15記載の到着要求時刻(RTA)遂行能力を表示する方法。
【請求項17】
前記乗物の限界内の最高速許容速度を使用することによる前記中間地点の最先到着時刻を受け取るステップと、
前記乗物の限界内の最低速許容速度を使用することによる前記中間地点の第2の到着時刻を受け取るステップと、
前記第1および第2の到着時刻をグラフィックで表示するステップと
をさらに含む、請求項14記載の到着要求時刻(RTA)遂行能力を表示する方法。
【請求項18】
複数の指示エリアを含むグラフィック表示画面を含む前方視野表示システムであって、少なくとも1つの指示エリアが、
所定の中間地点の現時点の到着予定時刻(ETA)をグラフィックで表示し、
前記現時点ETA値および選択した到着要求時刻(RTA)の時刻許容値に関連する前記RTAの値をグラフィックで表示し、
乗物の最高速の現時点の速度限界を使用して前記乗物が前記所定の中間地点に到達することができる最先時刻をグラフィックで表示し、
前記乗物の最低速の現時点の速度限界を使用して前記乗物が前記所定の中間地点に到達することができる最終時刻をグラフィックで表示し、
前記選択したRTA時刻許容値内に前記乗物が前記中間地点に達することができることへの不確実性をグラフィックで表示する
ように構成された到着要求時刻(RTA)表示指示器を含む、前方視野表示システム。
【請求項19】
時間および距離の少なくとも一方の単位で目盛り付けされた目盛をさらに含む、請求項18記載の前方視野表示システム。
【請求項20】
前記グラフィック表示画面が水平位置表示を含み、前記RTA表示指示器が、乗物ETAを表す乗物アイコンおよびRTA時刻ボックス表示を含み、前記乗物アイコンと前記RTA時刻ボックス表示との相対位置が前記乗物RTA遂行能力を示す、請求項18記載の前方視野表示システム。
【請求項21】
前記グラフィック表示画面が水平位置表示を含み、前記RTA表示指示器が、前記RTA時刻ボックス表示の中央に隣接してRTA記号を含み、前記RTA記号および前記乗物アイコンの相対位置の差が前記所定の中間地点の到着時刻誤差を表す、請求項20記載の前方視野表示システム。
【請求項1】
乗物のための到着要求時刻(RTA)遂行能力グラフィック表示システムであって、
到着要求時刻に関連する所定のパラメータを受け取るようにプログラムされたプロセッサと、
前記プロセッサに通信可能に結合された第1の視覚表示器であり、
軸を含むダイヤルと、
所定の中間地点の現時点の到着予定時刻(ETA)を示す第1のマーカと、
前記現時点ETA値および選択したRTA時刻許容値に関連する前記RTAの値を示す第2のマーカと、
前記乗物が前記所定の中間地点に到達することができる最先時刻を表す第1の指示と、
前記乗物が前記所定の中間地点に到達することができる最終時刻を表す第2の指示と、
早い到着方向における前記ETAの不確実性を表す第3の指示と、
遅い到着方向における前記ETAの不確実性を表す第4の指示と
を含むRTAグラフィックを含む、第1の視覚表示器と
を備えるシステム。
【請求項2】
前記ダイヤルが軸のまわりに実質的に対称である、請求項1記載のRTA表示システム。
【請求項3】
前記プロセッサに通信可能に結合された第2の視覚表示器をさらに含み、前記第2の表示器が、
前記最先時刻と前記最終時刻との間の相対時間を示す長さを含むRTA時刻ボックスと、
前記現時点ETAに対応する指標を含む乗物記号と、
前記乗物が所定の中間地点を通過するのに要求される時刻を示すRTA記号と
を含むマップモードグラフィックを含む、請求項1記載のRTA表示システム。
【請求項4】
前記第1の視覚表示器が航空機水平位置表示を含む、請求項1記載のRTA表示システム。
【請求項5】
前記マップモードグラフィックが水平位置表示上で前記乗物の首線に位置合わせされる、請求項3記載のRTA表示システム。
【請求項6】
前記RTA時刻ボックスの長さが、前記最先時刻および前記最終時刻に前記乗物の対地速度を乗算したものを使用して乗物航路に沿った距離を表す、請求項3記載のRTA表示システム。
【請求項7】
前記指標と前記RTA記号との間の差が、前記中間地点の前記乗物ETAと前記中間地点の前記RTAとの間の差を表す、請求項3記載のRTA表示システム。
【請求項8】
前記RTA時刻ボックスの外に位置決めされた前記指標の指示が、早い到着状態および遅い到着状態のうちの少なくとも一方を表す、請求項3記載のRTA表示システム。
【請求項9】
前記第1の視覚表示器が航空機主飛行表示器を含む、請求項1記載のRTA表示システム。
【請求項10】
前記ダイヤルが時間の単位で目盛り付けされた目盛を含む、請求項1記載のRTA表示システム。
【請求項11】
前記第1のマーカが前記ダイヤルの中央に位置決めされる、請求項1記載のRTA表示システム。
【請求項12】
前記第1の指示が前記ダイヤルの第1の限界から前記第1のマーカの方に延びる第1のバー指示を含み、前記第2の指示が前記目盛の第2の限界から前記第1のマーカの方に延びる第2のバー指示を含む、請求項1記載のRTA表示システム。
【請求項13】
前記第3の指示が前記目盛の第1の限界から前記第1のマーカの方に延びる第3のバー指示を含み、前記第4の指示が前記目盛の前記第2の限界から前記第1のマーカの方に延びる第4のバー指示を含む、請求項1記載のRTA表示システム。
【請求項14】
到着要求時刻(RTA)遂行能力を表示する方法であって、
中間地点の位置情報、前記中間地点の乗物の到着要求時刻(RTA)、前記RTAに関する許容度、および前記中間地点の到着予定時刻(ETA)を含む中間地点情報を受け取るステップと、
前記ETAを基準として前記RTAをグラフィックで表示するステップと
を含む方法。
【請求項15】
前記中間地点の前記ETAの不確実性をグラフィックで表示するステップをさらに含む、請求項14記載の到着要求時刻(RTA)遂行能力を表示する方法。
【請求項16】
前記中間地点の前記ETAの前記不確実性が、水平位置不確実性の航路沿い成分、および前記乗物の前方の予測の風データに起因する不確実性の少なくとも一方を含む、請求項15記載の到着要求時刻(RTA)遂行能力を表示する方法。
【請求項17】
前記乗物の限界内の最高速許容速度を使用することによる前記中間地点の最先到着時刻を受け取るステップと、
前記乗物の限界内の最低速許容速度を使用することによる前記中間地点の第2の到着時刻を受け取るステップと、
前記第1および第2の到着時刻をグラフィックで表示するステップと
をさらに含む、請求項14記載の到着要求時刻(RTA)遂行能力を表示する方法。
【請求項18】
複数の指示エリアを含むグラフィック表示画面を含む前方視野表示システムであって、少なくとも1つの指示エリアが、
所定の中間地点の現時点の到着予定時刻(ETA)をグラフィックで表示し、
前記現時点ETA値および選択した到着要求時刻(RTA)の時刻許容値に関連する前記RTAの値をグラフィックで表示し、
乗物の最高速の現時点の速度限界を使用して前記乗物が前記所定の中間地点に到達することができる最先時刻をグラフィックで表示し、
前記乗物の最低速の現時点の速度限界を使用して前記乗物が前記所定の中間地点に到達することができる最終時刻をグラフィックで表示し、
前記選択したRTA時刻許容値内に前記乗物が前記中間地点に達することができることへの不確実性をグラフィックで表示する
ように構成された到着要求時刻(RTA)表示指示器を含む、前方視野表示システム。
【請求項19】
時間および距離の少なくとも一方の単位で目盛り付けされた目盛をさらに含む、請求項18記載の前方視野表示システム。
【請求項20】
前記グラフィック表示画面が水平位置表示を含み、前記RTA表示指示器が、乗物ETAを表す乗物アイコンおよびRTA時刻ボックス表示を含み、前記乗物アイコンと前記RTA時刻ボックス表示との相対位置が前記乗物RTA遂行能力を示す、請求項18記載の前方視野表示システム。
【請求項21】
前記グラフィック表示画面が水平位置表示を含み、前記RTA表示指示器が、前記RTA時刻ボックス表示の中央に隣接してRTA記号を含み、前記RTA記号および前記乗物アイコンの相対位置の差が前記所定の中間地点の到着時刻誤差を表す、請求項20記載の前方視野表示システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公表番号】特表2012−507437(P2012−507437A)
【公表日】平成24年3月29日(2012.3.29)
【国際特許分類】
【出願番号】特願2011−534670(P2011−534670)
【出願日】平成21年10月27日(2009.10.27)
【国際出願番号】PCT/US2009/062164
【国際公開番号】WO2010/056508
【国際公開日】平成22年5月20日(2010.5.20)
【出願人】(506388923)ジーイー・アビエイション・システムズ・エルエルシー (46)
【Fターム(参考)】
【公表日】平成24年3月29日(2012.3.29)
【国際特許分類】
【出願日】平成21年10月27日(2009.10.27)
【国際出願番号】PCT/US2009/062164
【国際公開番号】WO2010/056508
【国際公開日】平成22年5月20日(2010.5.20)
【出願人】(506388923)ジーイー・アビエイション・システムズ・エルエルシー (46)
【Fターム(参考)】
[ Back to top ]