
制動シミュレーション装置
【課題】ABS制御ユニットの制御パラメータであるスリップ率を容易に設定変更を可能とする制動シミュレーション装置を提供する。
【解決手段】車両の運動を表現する車両モデルと、車両モデルとの情報の受渡しによりタイヤの運動を表現するタイヤモデルとを有するソフトウェアと、車両モデルと情報の受渡しを行う油圧系部品と、車両モデルからの情報に応じて油圧系部品を制御するABS制御ユニットとを有するハードウェアとを備え、車両モデルが有する情報のうち車両モデルから出力される車体速度と車輪回転速度とに応じて補正した補正車輪回転速度をABS制御ユニットに供給する補正手段をさらに備え、補正手段が車体速度と車輪回転速度に基づいて算出されるスリップ率をデータマップにより補正して補正スリップ率を求め、この補正スリップ率に基づいて補正車輪回転速度を算出して、ABS制御ユニットに出力するようにした。
【解決手段】車両の運動を表現する車両モデルと、車両モデルとの情報の受渡しによりタイヤの運動を表現するタイヤモデルとを有するソフトウェアと、車両モデルと情報の受渡しを行う油圧系部品と、車両モデルからの情報に応じて油圧系部品を制御するABS制御ユニットとを有するハードウェアとを備え、車両モデルが有する情報のうち車両モデルから出力される車体速度と車輪回転速度とに応じて補正した補正車輪回転速度をABS制御ユニットに供給する補正手段をさらに備え、補正手段が車体速度と車輪回転速度に基づいて算出されるスリップ率をデータマップにより補正して補正スリップ率を求め、この補正スリップ率に基づいて補正車輪回転速度を算出して、ABS制御ユニットに出力するようにした。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ABS(アンチロックブレーキシステム)とタイヤのマッチングにおいて制動性能のシミュレーションをするための制動シミュレーション装置に関する。
【背景技術】
【0002】
例えば、タイヤメーカーには、自動車メーカーの開発する車両や生産する車両が目標とする性能が得られるようなタイヤを提供することが求められる。
そのためには、提供が検討されるタイヤを車両に装着して実車テストを行うことが最も好ましいが、実車テストの走行試験において、走行環境や種々のテスト条件を一定に保つことは困難である。さらに、多くのタイヤをテスト車両に装着して実車テストを行う必要があるため、多大な時間と労力を費やすこととなり、容易なことではない。
そこで、タイヤメーカーでは、実車テストのシミュレーションを行うことにより車両の性能に見合うタイヤを選定し、提案、提供するようにしている。このタイヤの選定には、車両毎に最適なタイヤの選定、あるいは、種々の車両に対してロバスト性の高いタイヤの選定がある。前者は、メーカーに納入するときの車種毎に最適なタイヤの選定であり、後者は、種々の車両に対して装着される市販用(補修用)タイヤとして最適なタイヤの選定である。
上記のようなタイヤ選定のシミュレーションにおいては、特に、車両に必要とされる性能のうち重要な制動に関するシミュレーションを行うようにしており、この制動に関するシミュレーションが制動シミュレーション装置によって行われている。
従来、制動シミュレーション装置は、車両の備えるABS(アンチロックブレーキシステム)とタイヤのマッチングにより変化する制動性能を評価するために用いられる。
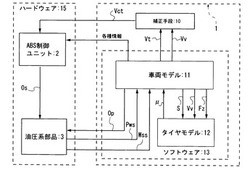
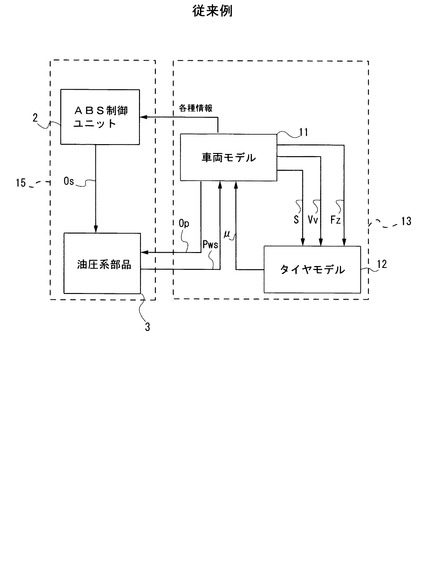
制動シミュレーション装置は、特許文献1及び図12に示すように、実車テストにおける実車とタイヤや走行環境や種々のテスト条件が、車両モデル11とタイヤモデル12とを有するソフトウェア13によって表現され、ソフトウェア13から出力される情報に基づいて、実際に作動するブレーキの油圧系部品3と、ABS制御ユニット2とからなるハードウェア15によって構成される。すなわち、仮想と現実を組み合わせてシミュレーションを行う形態である。
ソフトウェア13の車両モデル11は、仮想的に車両の運動を表現し、シミュレーションによって算出されるタイヤのスリップ率S、車両の上下荷重Fz及び車体速度Vvの情報をタイヤモデル12に出力する。タイヤモデル12は、仮想的にタイヤの運動を表現し、車両モデル11から入力されるタイヤのスリップ率S、車両の上下荷重Fz及び車体速度Vvの情報に基づいて、ABS制動中における仮想路面上のタイヤ(制動摩擦係数)μを算出する。
また、ハードウェア15の油圧系部品3は、車両モデル11から供給される情報に基づいて作動する。ABS制御ユニット2は、油圧系部品3及び車両モデル11からの情報に応じて油圧系部品3の作動を制御する。
上記のように構成することで、従来の制動シミュレーション装置では、ABS制御ユニット2のシミュレーションモデルを設けずに制動シミュレーションが行われている。
しかし、タイヤとのマッチングを検討する車両の車名が同一であっても車両のグレードなどによりABS制御ユニット2の制御パラメータが異なるにもかかわらず、ABS制御ユニット2を共通で使用してシミュレーションがなされているため、ABS制御ユニット2の制御パラメータが固定されたままとなり、車両毎に適したタイヤのマッチングを精度よくシミュレーションすることができない。また、車両が異なることによってもABS制御ユニット2の制御パラメータが異なるために、種々の車両に対してロバスト性の高いタイヤを精度よくシミュレーションすることができない。
例えば、ABS制御ユニット2がABS制動を制御する制御パラメータの一つに目標スリップ率Sがある。制動時のタイヤはスリップを起こしながら転がるため、車体の移動する距離は、タイヤの転がる距離よりも実際にはより長くなる。このタイヤの転がる距離よりも余分に車体の移動した距離がスリップした距離となり、これを実際に車体の移動した距離で割ったものがスリップ率Sと呼ばれる。ABS制御ユニット2では、制動力が最も有効に働くようにスリップ率Sが設定されている。
このスリップ率Sを変更したい場合には、ABS制御ユニット2のソフトウェアに変更を加える必要があり、ABS開発メーカーや自動車メーカーなどが使用する専用ツールにより変更が可能となるが、ABS開発メーカー毎,自動車メーカー毎に専用ツールが異なるため、多くの専用ツールを必要とし、容易にスリップ率Sの変更を行うことができない。
そのため、検討したい目標とするスリップ率Sを有するABS制御ユニット2や車両を用意して、それぞれのABS制御ユニット2とタイヤとを組み合わせて制動シミュレーションを行ってABS制動の制動性能を評価している。しかし、ABS制御ユニット2の調達、又は車両の調達などの手間やそれらを制動シミュレーション装置に組み入れる手間などがかかり、ABS制御ユニット2とタイヤの制動性能を評価する作業の作業性の効率を悪化させ、速やかに検討を行うことができない。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−94241号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明は、ABS制御ユニットとタイヤのマッチングによる制動性能を検討するためのABS制動をシミュレーションするときに、ABS制御ユニットの制御パラメータであるスリップ率を容易に設定変更することを可能とする制動シミュレーション装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明の第1の構成として、ABSとタイヤのマッチングにより変化する制動をシミュレーションする制動シミュレーション装置であって、車両の運動を表現する車両モデルと、車両モデルとの情報の受渡しによりタイヤの運動を表現するタイヤモデルとを有するソフトウェアと、車両モデルと情報の受渡しを行う油圧系部品と、車両モデルからの情報に応じて油圧系部品を制御するABS制御ユニットとを有するハードウェアとを備え、車両モデルが有する情報のうち車両モデルから出力される車体速度と車輪回転速度とに応じて補正した補正車輪回転速度をABS制御ユニットに供給する補正手段をさらに備える構成とした。
本発明によれば、補正手段が補正車輪回転速度をABS制御ユニットに供給することで、ABS制御ユニットの制御パラメータを変更しなくても、ABS制御ユニットが、補正車輪回転速度と車体速度に基づいて油圧系部品を制御するため、補正しない車輪回転速度が入力されたときと比べて異なるように油圧系部品を制御することができる。また、同じ車体速度と車輪回転速度でも、補正車輪回転速度が複数の異なるパターンで出力されるように補正手段によって補正されれば、擬似的にABS制御ユニットの制御パラメータを変更したときと同じ効果が得られ、効率よくABSとタイヤのマッチングにより変化する制動のシミュレーションを行うことができ、車両に適したタイヤの選定、及び種々の車両に対してロバスト性の高いタイヤの選定をすることができる。
【0006】
本発明の第2の構成として、ハードウェアは、車両モデルから出力される車体速度に基づき、タイヤモデルとなるタイヤを回転させるタイヤ回転手段と、少なくともタイヤ1輪の前後力を測定する測定手段とを有し、油圧系部品がタイヤの回転を制動し、出力される情報に基づきタイヤモデルを表現する構成とした。
本発明によれば、実際に回転するタイヤを制動させてタイヤモデルを表現させることにより、実車テストに近い制動シミュレーションを行うことができる。また、タイヤ回転手段を車両モデルによって回転が制御される回転ドラムで構成して、回転ドラムに実際のタイヤを接触させてタイヤを回転させれば、実際に路面を走行するタイヤが表現された制動シミュレーションを行うことができ、車両に適したタイヤの選定、及び種々の車両に対してロバスト性の高いタイヤの選定をすることができる。さらに、測定手段が測定するタイヤに作用する力のうち、少なくともタイヤ1輪の前後力が車両モデルに入力されるのでより精度のよい制動シミュレーションを行うことができる。
【0007】
本発明の第3の構成として、補正手段は、車体速度と車輪回転速度に基づいて算出されるスリップ率を補正して補正スリップ率を求めるデータマップを有し、補正スリップ率に基づいて補正車輪回転速度を算出する構成とした。
本発明によれば、補正手段が、スリップ率をデータマップに基づいて補正スリップ率に補正をするので複雑な演算が不要となり、補正にかかる処理速度を高速化させて、容易に補正車輪回転速度を得ることができる。また、データマップにABS制御ユニットの有する制御パラメータのような特性線図を備えれば、実車のABS制御ユニットの制御パラメータに補正を施したようなシミュレーションを行うことができる。
【0008】
本発明の第4の構成として、データマップは、補正手段の算出するスリップ率が0%又は100%のいずれかのときは、補正スリップ率はスリップ率と同じ値に設定される構成とした。
本発明によれば、データマップは、スリップ率が0%のときは補正スリップ率を0%、スリップ率が100%のときは補正スリップ率を100%に補正されるように設定することで、実際の路面でスリップしていないときには、シミュレーション内でもスリップが発生しないように補正を施すことで、実現象に沿った解析が可能になる。つまり、スリップ率が100%とは、車両が停止状態、又は走行中において車輪がロック状態であり、スリップ率が0%とは、スリップしていない状態であるため、この部分では補正をしない。
【0009】
本発明の第5の構成として、データマップは、スリップ率を異なる値の補正スリップ率に補正する複数の補正テーブルを有し、複数の補正テーブルのうちいずれか一つを選択し、選択した補正テーブルによりスリップ率を補正する構成とした。
本発明によれば、データマップが有する複数の補正テーブルから一つを選択し、選択した補正テーブルによりスリップ率を補正するようにしたことで、データマップから順次一つずつ補正テーブルを選択してシミュレーションを行えば、制御パラメータの異なる複数のABS制御ユニットを用意して、シミュレーションをすることと同じになるので、ABS制御ユニットの調達、又はABS制御ユニットを備えた車両の調達などの手間や、ABS制御ユニットを制動シミュレーション装置に設置する手間などが不要となり、ABS制御ユニットとタイヤの制動性能を評価する作業の作業性の効率を向上させ、速やかに検討を行うことができるようになる。
【図面の簡単な説明】
【0010】
【図1】本発明に係る制動シミュレーション装置の概念図。
【図2】本発明に係る制動シミュレーション装置のブロック図。
【図3】本発明に係る補正手段のブロック図。
【図4】本発明に係るスリップ率を補正するデータマップ。
【図5】本発明に係るスリップ率を補正するデータマップの拡大図。
【図6】本発明に係る補正テーブルによるスリップ率の補正例を示す図。
【図7】本発明に係る補正テーブルによるスリップ率の補正例を示す図。
【図8】本発明に係る補正テーブルにより補正されたスリップ率の時間変化を示すグラフ。
【図9】本発明に係る補正スリップ率の移動量に対する制動距離を示すグラフ。
【図10】本発明に係る補正スリップ率の移動量に対する制動力を示すグラフ。
【図11】本発明の実施形態2に係る制動シミュレーション装置の概念図。
【図12】従来の制動シミュレーション装置のブロック図。
【発明を実施するための形態】
【0011】
以下、制動シミュレーション装置の一実施例について説明する。
図1は、制動シミュレーション装置の概念図を示し、図2は、制動シミュレーション装置のブロック図を示し、図3は、補正手段のブロック図を示す。
なお、制動シミュレーション装置は、実際には、制動シミュレーションをする車両の車輪すべてについて制動シミュレーションが行われるが、そのうちの1輪に対応するものについて説明する。
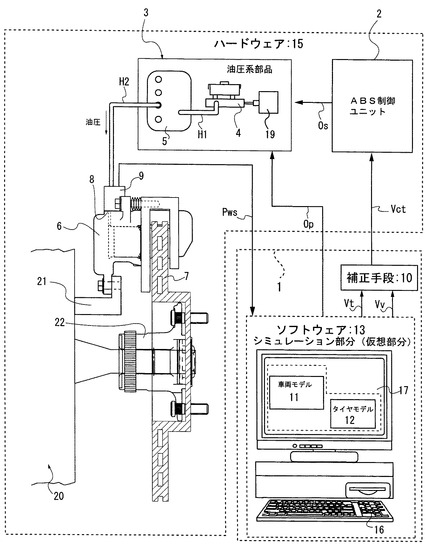
図1に示すように、制動シミュレーション装置は、概略、制動シミュレーションを行うコンピュータ1と、コンピュータ1から出力される信号に基づいて実際に動作するABS制御ユニット2と、ABS制御ユニット2からの情報によって作動する油圧系部品3によって構成される。なお、制動シミュレーションを行うコンピュータ1については後述する。
【0012】
油圧系部品3は、例えば、マスターシリンダ4、ABS油圧ユニット5、ブレーキキャリパ6、ブレーキディスク7などで構成される新車開発、実車装備の油圧系制動部品であって、自動車メーカーなどによりタイヤメーカー側に供給される。
ABS制御ユニット2は、油圧系部品3に付属するものであって、駆動信号Osを出力してブレーキキャリパ6に加わる油圧を制御する。具体的には、ABS制御ユニット2が、タイヤのロック状態を検出したときに、駆動信号Osが出力され、ABS油圧ユニット5内のソレノイドバルブなどを駆動する。この駆動により、マスターシリンダ4によって加圧された油圧が、ブレーキキャリパ6に断続的に加圧、減圧された油圧として作用するように制御される。
ABS制御ユニット2と油圧系部品3は、制動シミュレーションのモデルとなる実際の車両から取り外され、制動シミュレーションのハードウェア15としてのブレーキ試験装置20に取り付けられる。
【0013】
図1のブレーキ試験装置20は、制動試験のベンチテストを行う装置で、制動シミュレーションを行う後述のコンピュータ1が出力する各種情報に基づいて動作し、リアルタイムで行われる制動シミュレーションと同じブレーキの動作を実際に表現するハードウェアである。
マスターシリンダ4とABS油圧ユニット5は、ブレーキ試験装置20の所定の位置に取り付けられる。また、ブレーキキャリパ6は、ブレーキ試験装置20のキャリパ固定部21に取り付けられ、ブレーキディスク7は、後述のコンピュータ1からブレーキ試験装置20に出力される信号に基づいて回転するハブ22に取り付けられることで、ブレーキキャリパ6とブレーキディスク7が、車両に取り付けられた状態が再現される。
【0014】
そして、マスターシリンダ4とABS油圧ユニット5がブレーキ管H1によって接続され、ABS油圧ユニット5とブレーキキャリパ6がブレーキ管H2によって接続されることで実車と同様の油圧系統が形成される。
ブレーキ管H2の一端が接続されるブレーキキャリパ6の接続部8には、キャリパ内の油圧Pwsを検出する圧力センサ9が取り付けられ、この圧力センサ9を介してブレーキ管H2が取り付けられる。この圧力センサ9によって検出される油圧Pwsは、後述のコンピュータ1に出力される。
【0015】
コンピュータ1は、車両モデル11とタイヤモデル12を仮想的に表現するソフトウェア13を実行することで制動シミュレーションが行われ、この制動シミュレーションにより得られる情報は、油圧系部品3とABS制御ユニット2に出力される。
コンピュータ1には、キーボード16などから制動シミュレーションに必要な基本情報や種々の条件が入力される。
基本情報としては、モデルとなる実際の車両のモデル条件が詳細に入力される。例えば、車体寸法、車両重量、前後軸重量、懸架装置の性能情報、制動装置の性能情報である。
次に、制動シミュレーションの環境条件が入力される。例えば、路面の摩擦係数や路面の凹凸や横風などの情報である。
次に、制動シミュレーションの運転条件が入力される。例えば、アクセル操作量、ブレーキ操作量、ハンドル操作量などの情報である。
次に、タイヤのモデルとなる実際のタイヤのモデル条件が詳細に入力される。例えば、性能、寸法、摩擦特性や硬さなどの情報である。
また、コンピュータ1と接続するモニター17には、上記入力された各種情報や、制動シミュレーションにより表現される車両モデル11の動作などがリアルタイムに表示される。
【0016】
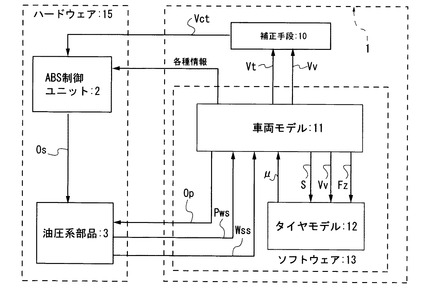
車両モデル11は、上記の入力された基本情報や種々の条件に基づいて制動シミュレーションすることで、実際の車両の代わりに車両の運動を表現する。
車両モデル11で得られるタイヤのスリップ率S,車両の上下荷重Fz及び車体速度Vvの情報は、リアルタイムでタイヤモデル12に供給される。また、マスターシリンダ4には、ブレーキ操作量Opを供給し、ABS制御ユニット2には、車輪回転速度Vtを除く各種情報が供給される。また、本発明に係る補正手段10には、車輪回転速度Vtと車体速度Vvが供給される。
なお、車輪回転速度Vtは、タイヤ半径×タイヤの回転する角速度(車軸の回転角速度)によって得られ、例えば制動シミュレーションを行う上での初期条件としては、車両の全てのタイヤが同じ車輪回転速度Vtで与えられる。また、車体速度Vvは、車両のすべてのタイヤから個々に出力される車輪回転速度Vtの平均によって求められる。
【0017】
タイヤモデル12は、コンピュータ1に入力されたタイヤのモデル条件と、車両モデル11から入力されるタイヤのスリップ率S、車両の上下荷重Fz及び車体速度Vvの情報に基づいて、仮想的にタイヤの運動を表現し、ABS制動中における仮想路面上のタイヤ(制動摩擦係数)μを算出してその値を車両モデル11に出力する。
【0018】
マスターシリンダ4は、マスターシリンダ4に取り付けられたアクチュエータ19が車両モデル11から入力されるブレーキ操作量Opの情報に基づいて駆動して油圧を発生させる。
【0019】
ABS制御ユニット2には、車両モデル11から車輪回転速度Vtを除く各種情報が供給される。この情報の中には、実際の車両からABS制御ユニット2に供給する情報と同じ情報が供給される。
また、ABS制御ユニット2は、上記情報と後述の補正手段10により供給される補正車輪回転速度Vctに基づいて、ABS油圧ユニット5に駆動信号Osを出力してブレーキディスク7に対するブレーキキャリパ6の押圧力を制御する。
【0020】
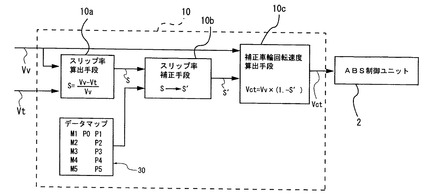
図3は、補正手段10の補正の過程を示すブロック図を示し、同図を用いて補正車輪回転速度Vctの算出方法について説明する。
図3に示すように、補正手段10は、車輪回転速度Vtを補正車輪回転速度Vctに補正するデータマップ30と、車両モデル11から出力される車輪回転速度Vtと車体速度Vvに基づいてタイヤのスリップ率Sを算出するスリップ率算出手段10aと、スリップ率算出手段10aで算出されたスリップ率Sをデータマップ30から選択された補正テーブル(P1〜P5又はM1〜M5のうちのいずれか)に基づいて補正スリップ率S′に補正するスリップ率補正手段10bと、スリップ率補正手段10bで補正された補正スリップ率S′と車体速度Vvに基づいて補正車輪回転速度Vctを算出し、ABS制御ユニット2に補正車輪回転速度Vctを出力する補正車輪回転速度算出手段10cを備える。
【0021】
具体的には、補正手段10では、まず、入力された車輪回転速度Vtと車体速度Vvに基づいてスリップ率Sが次式Aによって算出される。
スリップ率S=(車体速度Vv−車輪回転速度Vt)/車体速度Vv―――A
次に、算出されたスリップ率Sが、所望のスリップ率Sとなるように補正して、補正スリップ率S′が得られるように、図4に示すデータマップ30から、一つの補正テーブル(P1〜P5とM1〜M5のうちからいずれか)を選択する。
次に、選択された補正テーブルP1〜P5と補正テーブルM1〜M5に基づいてスリップ率Sを補正することにより所望の補正スリップ率S′が得られる。
次に、車両モデル11から入力された車体速度Vvと補正スリップ率S′から補正車輪回転速度Vctを算出するために、上記式Aを次式Bのように変形する。
補正車輪回転速度Vct=車体速度Vv×(1.−補正スリップ率S′)―――B
上記式Bにより、補正車輪回転速度Vctを得ることができる。
【0022】
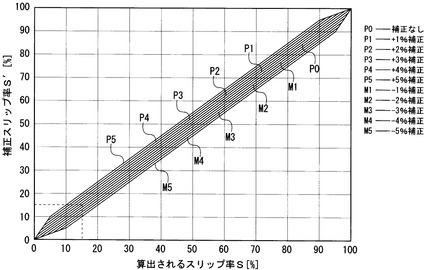
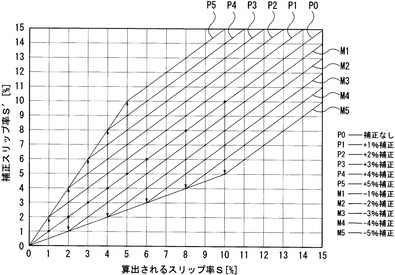
図4は、スリップ率Sから補正スリップ率S′を得るためのデータマップ30を示し、図5は、図4においてスリップ率Sが0%から15%までに対応する範囲のデータマップ30の拡大図を示す。
図4に示すように、データマップ30は、補正手段10の算出するスリップ率Sが0%又は100%のいずれかのときは、補正スリップ率S′はスリップ率Sと同じ値に設定される。つまり、算出されたスリップ率Sが0%と100%のときには、補正を行わないように設定される。
【0023】
これにより、実際の現象としてタイヤがスリップしていないときを示すスリップ率0%と、実際の現象としてタイヤがロック、又は動いていないときを示すスリップ率100%が維持されるので、実際の現象に則した制動シミュレーションを行うことができる。
【0024】
また、データマップ30は、スリップ率Sを異なる値の補正スリップ率S′に補正する複数の補正テーブルP1〜P5と補正テーブルM1〜M5によって構成され、複数の補正テーブルP1〜P5と補正テーブルM1〜M5のうちいずれか一つを選択し、選択した補正テーブルによりスリップ率Sを補正して補正スリップ率S′が得られるようにしている。
【0025】
上記のようにデータマップ30を構成することで、補正テーブルP1〜P5と補正テーブルM1〜M5の一つ一つが擬似的に、異なる制御パラメータを有したABS制御ユニット2を表現することになるので、複数のABS制御ユニット2の調達や車両の調達などの手間や、それらを制動シミュレーション装置に組み入れる手間などが不要となり、車両とタイヤの制動性能を評価する作業において作業効率を向上させて、速やかな検討を行うことができるようになる。
【0026】
なお、本実施例では、補正テーブルP1〜P5と補正テーブルM1〜M5は、補正しない補正テーブルP0をそれぞれ補正スリップ率S′が−5%から+5%の範囲で1%ずつスライドさせた形態である。
【0027】
具体的には、補正テーブルP1は、スリップ率Sが1%から99%までは一定にスリップ率Sを+1%とする補正を行う。また、補正テーブルP2は、スリップ率Sが2%から98%までは一定にスリップ率Sを+2%とする補正を行う。また、補正テーブルP3は、スリップ率Sが3%から97%までは一定にスリップ率Sを+3%とする補正を行う。また、補正テーブルP4は、スリップ率Sが4%から96%までは一定にスリップ率Sを+4%とする補正を行う。また、補正テーブルP5は、スリップ率Sが5%から95%までは一定にスリップ率Sを+5%とする補正を行う。
また、補正テーブルM1は、スリップ率Sが1%から99%までは一定にスリップ率Sを−1%とする補正を行う。また、補正テーブルM2は、スリップ率Sが2%から98%までは一定にスリップ率Sを−2%とする補正を行う。また、補正テーブルM3は、スリップ率Sが3%から97%までは一定にスリップ率Sを−3%とする補正を行う。また、補正テーブルM4は、スリップ率Sが4%から96%までは一定にスリップ率Sを−4%とする補正を行う。また、補正テーブルM5は、スリップ率Sが5%から95%までは一定にスリップ率Sを−5%とする補正を行う。
【0028】
なお、スリップ率Sが0%から10%までの範囲で、補正量が+1%から+5%までの範囲においては、スリップ率Sが補正量をプラスした値まではスリップ率Sが2倍となるように補正スリップ率S′を出力するように設定される。
また、補正する量が−1%から−5%までの範囲においては、スリップ率Sが補正量をマイナスした値まではスリップ率Sが1/2倍となるように補正スリップ率S′を出力するように設定される。
また、スリップ率Sが90%から100%までの範囲で、補正量が+1%から+5%までの範囲においては、スリップ率Sが補正量をプラスした値まではスリップ率Sが1/2倍となるように補正スリップ率S′を出力するように設定される。
また、補正する量が−1%から−5%までの範囲においては、スリップ率Sが補正量をマイナスした値まではスリップ率Sが2倍となるように補正スリップ率S′を出力するように設定される。
【0029】
なお、データマップ30からの補正テーブルP1〜P5と補正テーブルM1〜M5の選択は、制動シミュレーションを実行する前にあらかじめ設定され、一つのABS制御ユニット2とタイヤを組み合わせた制動シミュレーションを行うことができる。また、制動シミュレーション毎に、データマップ30の補正テーブルP1〜P5と補正テーブルM1〜M5の中から選択される補正テーブルを順次変更することで一つのタイヤに対して制御パラメータの異なる複数のABS制御ユニット2を組み合わせた制動シミュレーションを行うことができる。
【0030】
上記構成により、次のような制動シミュレーションがなされることについて、各図を用いて説明する。
コンピュータ1に制動シミュレーションを行う実際のモデルとなる車両の基本情報などのモデル条件と、制動シミュレーションの環境条件と、運転条件が入力され、さらに、データマップ30から補正テーブルが選択される。
【0031】
そして、コンピュータ1により制動シミュレーションが開始されると、ブレーキディスク7がコンピュータ1内の車両モデル11と同じ車輪回転速度Vtで回転する。所定の時間経過後に、車両モデル11は、マスターシリンダ4のアクチュエータ19にABS制動(急ブレーキ)となるようなブレーキ操作量Opを示す信号を出力して、マスターシリンダ4を作動させる。
マスターシリンダ4によって発生した油圧は、ブレーキキャリパ6に伝わりブレーキディスク7を挟み込んでロック状態が作り出される。このとき、コンピュータ内の車両モデル11においても、同様に、ロック状態が表現されている。
ブレーキキャリパ6に生じている油圧が、圧力センサ9により検出されて車両モデル11に油圧Pwsとして入力され、この油圧Pwsと車体速度Vv、制動摩擦係数μなどの情報が車両モデル11からABS制御ユニット2に出力される。これと同時に、補正手段10では、車両モデル11から出力された車体速度Vvと車輪回転速度Vtに基づきスリップ率Sを算出し、このスリップ率Sを最初に設定された補正テーブルにしたがって補正スリップ率S′として補正したのち、補正スリップ率S′と車体速度Vvから補正車輪回転速度Vctを算出してABS制御ユニット2に出力する。
ABS制御ユニット2は、上記油圧Pwsと車体速度Vv、制動摩擦係数μなどの情報と補正車輪回転速度Vctに基づいて、駆動信号OsをABS油圧ユニット5に出力することでブレーキキャリパ6の油圧を制御してABS制動のシミュレーションが実際に表現される。
【0032】
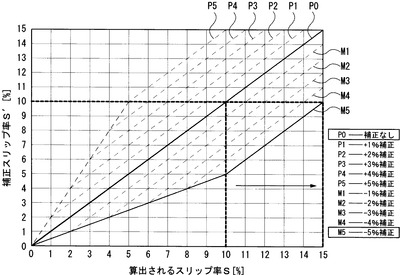
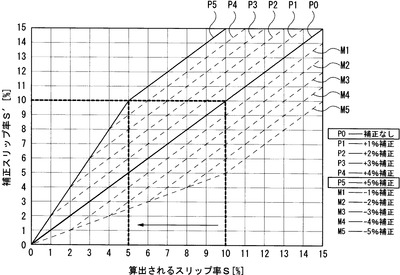
図6は、スリップ率Sが、−5%補正されるように補正テーブルM5を選択したときのデータマップ30の拡大図を示し、図7は、スリップ率Sが、+5%補正されるように補正テーブルP5を選択したときのデータマップの拡大図を示す。
図6に示すように、スリップ率Sが−5%補正されるように補正テーブルM5を選択したときには、算出されたスリップ率Sが10%とすると補正しないときに比べて、補正スリップ率S′は、10%から5%へと5%小さく補正される。つまり、車体速度Vvと車輪回転速度Vtの差、すなわちタイヤのスリップが小さく得られるので強い制動が可能となり、ブレーキキャリパ6に油圧が大きくなるような制御がなされ、結果として制動距離が縮むような制御となる。
図7に示すように、スリップ率Sが+5%補正されるように補正テーブルP5を選択したときには、算出されたスリップ率Sが10%とすると補正を行わないときに比べて、補正スリップ率S′は、10%から15%へと5%大きくスリップしているように補正される。つまり、車体速度Vvと車輪回転速度Vtの差、すなわちタイヤのスリップが大きく得られるので弱い制動が可能となり、ブレーキキャリパ6に油圧が小さくなるような制御がなされ、結果として制動距離が伸びるような制御となる。
【0033】
図8は、補正テーブルによりスリップ率Sが時間の経過によりどのように変化するかを検証したグラフで、目標とするスリップ率Sが+5%と−5%されるように補正テーブルP5とM5を選択して制動シミュレーションを行い、補正をしたときのスリップ率Sの時間変化と補正なしのスリップ率Sの時間変化を比較したものである。
図8に示すように、目標とするスリップ率Sが−5%となるように補正テーブルM5を選択したときのスリップ率Sは、補正を行わないときに比べて、全体的にスリップ率Sが小さく表れている。また、目標とするスリップ率Sが+5%となるように補正テーブルP5を選択したときのスリップ率Sは、補正を行わないときに比べて、全体的にスリップ率Sが大きく表れている。つまり、補正テーブルM5,P5によってスリップ率Sが補正スリップ率S′として補正され、算出された補正車輪回転速度VctがABS制御ユニット2に出力された効果が、それぞれ意図する方向に制御されていることを示している。
【0034】
図9及び図10に示すグラフは、ドライ路面において、スリップ率Sが1%刻みで−5%〜+5%の範囲で補正されるように、車体速度Vvが102kmからの全制動の制動シミュレーション行ったときの特徴部分を示すグラフで、図9は、補正スリップ率の移動量に対して車体の制動距離の変化を示すグラフであり、図10は、補正スリップ率の移動量に対して制動摩擦係数μと車両の上下荷重Fzに基づいて算出された前輪側の制動力と後輪側の制動力の変化を示すグラフである。
図9に示すように、補正スリップ率S′の移動量が0%から−2%に移動したときには平均制動距離が1.7m長くなり、+2%に移動したときには平均制動距離が0.5m短くなっている。特に、補正スリップ率S′の移動量が+2%に補正されたときが、平均制動距離が最も短くなる極値となっている。つまり、補正スリップ率の移動量が+2%のときに平均制動距離が最も短くなりその他の範囲では平均制動距離が伸びてしまうことになる。
また、図10に示すように、前輪側の制動力は最適値(極値)を持つことがわかり、後輪側では、補正スリップ率S′の移動量が+側に大きく補正されるほど制動力が大きくなっていることがわかる。これは、ブラックボックスであるABS制御ユニット2内で制御されるスリップ率の制御範囲が、前輪側と後輪側で異なることに起因している。後輪側では、ABS制御ユニット2内でのスリップ率の算出に重要な車体速度を推定するために、スリップ率が小さく制御されるように設定されているため、ABS制御ユニット2内でのスリップ率が大きくなるように補正車輪回転速度Vctを制御するほど制動力が増加することになる。
【0035】
実施形態2
以下、図11を用いて実施形態2について説明する。
実施形態2は、図11に示すように、実施形態1とほぼ同一構成として、ハードウェア15としての油圧系部品3と油圧系部品3を制御するABS制御ユニット2とブレーキ試験装置20に加えて、実際のタイヤT(実タイヤT)と、タイヤ回転手段としての回転ドラム50又は図外のムービングベルトからなるハードウェアを合わせて使う形態である。
具体的には、実タイヤTをホイール25に組み付けて、タイヤ・ホイールのセットにしてブレーキ試験装置20のハブ22にブレーキディスク7とともに取り付け、このタイヤ・ホイールに対して回転ドラム50を接触させることにより実タイヤTを回転させてタイヤモデル12を表現する。
さらに、ホイール25には、実タイヤTに作用する力fx,fy,fz及びモーメントMx,My,Mzを測定する測定手段としてのホイール6分力計26が取り付けられる。力fxはタイヤTに作用する水平方向の力、すなわちタイヤTが車体に取り付けられたときの前後方向に作用する力であり、力fyはタイヤTが車体に取り付けられたときの車軸方向に作用する力であり、力fzはタイヤTに作用する鉛直方向の力、すなわち、タイヤTが車体に取り付けられたときの上下方向に作用する力である。また、モーメントMxはタイヤTが車体に取り付けられたときの前後方向の軸周りに作用するモーメントであり、モーメントMyはタイヤTが車体に取り付けられたときの車軸周りに作用するモーメントであり、モーメントMzはタイヤTが車体に取り付けられたときの鉛直軸周りに作用するモーメントである。
なお、タイヤTに作用する力を測定するためにホイール6分力計26をホイール25に装着するとしたが、ハブ22を支持する軸27にセンサを取り付けて、軸27に作用する上記力fx,fy,fz及びモーメントMx,My,Mzを測定するようにしてもよい。
本実施形態2では、ホイール6分力計26により測定される力のうち、力fxが制動シミュレーションの車両モデル11に入力される。このように少なくともタイヤ1輪の前後力が制動シミュレーションに入力されることで精度のよいシミュレーションができるようになる。
また、ハブ22は実施形態1のようにコンピュータ1からブレーキ試験装置20に出力される信号に基づいて回転しない。
【0036】
実タイヤTは、タイヤモデル12としてモデル条件、例えば、性能、寸法、摩擦特性や硬さなどの情報がコンピュータ1に入力される実際のタイヤである。
回転ドラム50は、ブレーキ試験装置20に取り付けられた実タイヤTと接触するように実タイヤTの下方に位置し、車両モデル11から出力される車体速度Vvに基づいて回転が制御される。さらに車両モデル11で表現される車両の上下荷重Fzに対応するように実タイヤTに荷重Rdを負荷するように回転ドラムが上下し、さらに実タイヤTに対して回転ドラム50が角度を有するように動作させる図外の可動手段を備える。なお、タイヤ回転手段は、回転ドラム50でなく、環状に形成されたベルトを回転させるムービングベルトであってもよい。
【0037】
上記構成によれば、回転ドラム50の回転が、車両モデル11の出力する車体速度Vvとなるように制御されることで、実際の路面(実路面)を表現することができ、この回転ドラム50を実路面とみなして実タイヤTに押圧して荷重Rdを負荷させつつ回転させることにより、実タイヤTが路面を走行している状態を表現することができるようになる。
さらに、回転ドラム50が、車両モデル11の出力する上下荷重Fzに基づいて実タイヤTと接触する力を制御されれば、実タイヤTに作用する荷重Rdを表現することができ、ホイール6分力計26によって測定される実タイヤTに作用する力のうち、実タイヤTの前後方向に作用する力fxが車両モデル11に入力されるのでより正確な制動シミュレーションを行うことができる。
また、回転ドラム50を実タイヤTに対して角度をつけて回転させれば、実タイヤTが路面に対して旋回しているときの状態を表現することができる。
【0038】
上記構成により、次のような制動シミュレーションを行うことができる。例えば、実施形態1に示した制動シミュレーションのタイヤモデル12のうち一輪を実タイヤTと回転ドラム50により表現し、ホイール6分力計26で測定した実タイヤTに作用する前後の力fxを車両モデル11の情報として入力して制動シミュレーションを行うものである。
まず、コンピュータ1に制動シミュレーションを行う実際のモデルとなる車両の基本情報などのモデル条件と、制動シミュレーションの環境条件と、運転条件が入力され、さらに、データマップ30から補正テーブルが選択される。
【0039】
そして、コンピュータ1により制動シミュレーションが開始されると、車両モデル11の出力する車体速度Vvとなるように回転ドラム50が回転する。
次に、回転ドラム50は、実タイヤTと接触するように上方に移動して、車両モデル11の出力する上下荷重Fzとなるように実タイヤTに荷重Rdを加える。これにより、実タイヤTとともにブレーキディスク7が回転する。
実タイヤTの回転は、実タイヤTが取り付けられたハブ22の実車輪速Wssを車輪速センサ18により測定し、この実車輪速Wssが車両モデル11に出力され、実タイヤTに作用する力は、ホイール6分力計26で測定され、測定された力のうち前後方向の力Fxが車両モデル11に逐次入力される。
次に、所定の時間経過後に、車両モデル11は、マスターシリンダ4のアクチュエータ19にABS制動(急ブレーキ)となるようなブレーキ操作量Opを示す信号を出力して、マスターシリンダ4を作動させる。
マスターシリンダ4によって発生した油圧は、ブレーキキャリパ6に伝わりブレーキディスク7を挟み込んで車両モデル11にロック状態が作り出される。このとき、実タイヤTにもロック状態となる。
次に、ブレーキキャリパ6に生じている油圧が、圧力センサ9により検出されて車両モデル11に油圧Pwsとして入力され、この油圧Pwsと車体速度Vv、制動摩擦係数μなどの情報が車両モデル11からABS制御ユニット2に出力される。これと同時に、補正手段10では、車両モデル11から出力された車体速度Vtと実車輪速Wssに基づきスリップ率Sを算出し、このスリップ率Sを最初に設定された補正テーブルにしたがって補正スリップ率S′として補正したのち、補正スリップ率S′と車体速度Vvから補正車輪回転速度Vctを算出してABS制御ユニット2に出力する。
ABS制御ユニット2は、上記油圧Pwsと車体速度Vv、制動摩擦係数μなどの情報と補正車輪回転速度Vctに基づいて、駆動信号OsをABS油圧ユニット5に出力することでブレーキキャリパ6の油圧を制御してABS制動のシミュレーションが実際に表現される。
【0040】
以上説明したように、実施形態2のように構成することで、より実車テストに近い制動シミュレーションを行うことができるようになるので、制動時や旋回時の実タイヤの摩耗状態などについての情報を得ることができ、車種毎に最適なタイヤ及び、種々の車両に装着される市販用(補修用)タイヤを選定するための制動シミュレーションがより精度良く行えるようになる。
また、実施形態2の説明において、タイヤモデル12のうち一輪を実タイヤTと回転ドラム50により表現したが、2輪でも4輪でもよい。タイヤモデル12の全ての車輪を実タイヤTと回転ドラム50によって表現すれば、より実車テストに近く精度のよい制動シミュレーションを行うことができる。
なお、ホイール6分力計26の測定する力のうち、力fxを車両モデル11に入力するとしたが、測定される全ての力fx,fy,fz及びモーメントMx,My,Mzのうち少なくとも力fxと他の力又はモーメントを組み合わせて車両モデル11に入力するようにしてもよく、測定されるすべての情報が車両モデル11に入力されることでより精度のよい制動シミュレーションを行うことができるようになる。さらに上記測定される力及びモーメントを車両モデル11に入力するとしたがタイヤモデル12にも入力するようにして制動シミュレーションを行ってもよい。
【0041】
上記実施形態1及び2において、補正手段10の備えるデータマップ30は、上記構成のような複数の補正テーブルの特性線を備える構成だけでなく、他の特性線で表されてもよく、また補正を行う特性線の数も上記に示した数以外によって構成されてもよい。
また、補正手段10から出力される補正車輪回転速度Vctが各車輪毎に出力されるとして説明をしたが、例えば、前輪側のみ補正車輪回転速度Vctを出力したり、後輪側のみ補正車輪回転速度Vctを出力したりするようにしてもよい。
また、コンピュータ1のソフトウェア13による制動シミュレーションに基づいて実際に動作するハードウェア15の構成も、油圧系部品3は、マスターシリンダ4、ABS油圧ユニット5、ブレーキキャリパ6、ブレーキディスク7だけでなくてもよく、さらに実タイヤTと回転ドラム50以外にも制動シミュレーションと同期して動作する懸架装置などのハードウェアが設けられてもよい。
【符号の説明】
【0042】
1 コンピュータ、2 ABS制御ユニット、3 油圧系部品、
4 マスターシリンダ、5 ABS油圧ユニット、6 ブレーキキャリパ、
7 ブレーキディスク、9 圧力センサ、10 補正手段、11 車両モデル、
12 タイヤモデル、13 ソフトウェア、15 ハードウェア、
16 キーボード、20 ブレーキ試験装置、21 キャリパ固定部、22 ハブ、
25 ホイール、26 ホイール6分力計、27 軸、30 データマップ、
50 回転ドラム、S スリップ率、S′ 補正スリップ率、
Vct 補正車輪回転速度、Vt 車輪回転速度、Vv 車体速度、
Fz 車両の上下荷重、Op ブレーキ操作量、Os 駆動信号、Pws 油圧、
μ 制動摩擦係数、M1〜M5,P1〜P5 補正テーブル、T 実タイヤ。
【技術分野】
【0001】
本発明は、ABS(アンチロックブレーキシステム)とタイヤのマッチングにおいて制動性能のシミュレーションをするための制動シミュレーション装置に関する。
【背景技術】
【0002】
例えば、タイヤメーカーには、自動車メーカーの開発する車両や生産する車両が目標とする性能が得られるようなタイヤを提供することが求められる。
そのためには、提供が検討されるタイヤを車両に装着して実車テストを行うことが最も好ましいが、実車テストの走行試験において、走行環境や種々のテスト条件を一定に保つことは困難である。さらに、多くのタイヤをテスト車両に装着して実車テストを行う必要があるため、多大な時間と労力を費やすこととなり、容易なことではない。
そこで、タイヤメーカーでは、実車テストのシミュレーションを行うことにより車両の性能に見合うタイヤを選定し、提案、提供するようにしている。このタイヤの選定には、車両毎に最適なタイヤの選定、あるいは、種々の車両に対してロバスト性の高いタイヤの選定がある。前者は、メーカーに納入するときの車種毎に最適なタイヤの選定であり、後者は、種々の車両に対して装着される市販用(補修用)タイヤとして最適なタイヤの選定である。
上記のようなタイヤ選定のシミュレーションにおいては、特に、車両に必要とされる性能のうち重要な制動に関するシミュレーションを行うようにしており、この制動に関するシミュレーションが制動シミュレーション装置によって行われている。
従来、制動シミュレーション装置は、車両の備えるABS(アンチロックブレーキシステム)とタイヤのマッチングにより変化する制動性能を評価するために用いられる。
制動シミュレーション装置は、特許文献1及び図12に示すように、実車テストにおける実車とタイヤや走行環境や種々のテスト条件が、車両モデル11とタイヤモデル12とを有するソフトウェア13によって表現され、ソフトウェア13から出力される情報に基づいて、実際に作動するブレーキの油圧系部品3と、ABS制御ユニット2とからなるハードウェア15によって構成される。すなわち、仮想と現実を組み合わせてシミュレーションを行う形態である。
ソフトウェア13の車両モデル11は、仮想的に車両の運動を表現し、シミュレーションによって算出されるタイヤのスリップ率S、車両の上下荷重Fz及び車体速度Vvの情報をタイヤモデル12に出力する。タイヤモデル12は、仮想的にタイヤの運動を表現し、車両モデル11から入力されるタイヤのスリップ率S、車両の上下荷重Fz及び車体速度Vvの情報に基づいて、ABS制動中における仮想路面上のタイヤ(制動摩擦係数)μを算出する。
また、ハードウェア15の油圧系部品3は、車両モデル11から供給される情報に基づいて作動する。ABS制御ユニット2は、油圧系部品3及び車両モデル11からの情報に応じて油圧系部品3の作動を制御する。
上記のように構成することで、従来の制動シミュレーション装置では、ABS制御ユニット2のシミュレーションモデルを設けずに制動シミュレーションが行われている。
しかし、タイヤとのマッチングを検討する車両の車名が同一であっても車両のグレードなどによりABS制御ユニット2の制御パラメータが異なるにもかかわらず、ABS制御ユニット2を共通で使用してシミュレーションがなされているため、ABS制御ユニット2の制御パラメータが固定されたままとなり、車両毎に適したタイヤのマッチングを精度よくシミュレーションすることができない。また、車両が異なることによってもABS制御ユニット2の制御パラメータが異なるために、種々の車両に対してロバスト性の高いタイヤを精度よくシミュレーションすることができない。
例えば、ABS制御ユニット2がABS制動を制御する制御パラメータの一つに目標スリップ率Sがある。制動時のタイヤはスリップを起こしながら転がるため、車体の移動する距離は、タイヤの転がる距離よりも実際にはより長くなる。このタイヤの転がる距離よりも余分に車体の移動した距離がスリップした距離となり、これを実際に車体の移動した距離で割ったものがスリップ率Sと呼ばれる。ABS制御ユニット2では、制動力が最も有効に働くようにスリップ率Sが設定されている。
このスリップ率Sを変更したい場合には、ABS制御ユニット2のソフトウェアに変更を加える必要があり、ABS開発メーカーや自動車メーカーなどが使用する専用ツールにより変更が可能となるが、ABS開発メーカー毎,自動車メーカー毎に専用ツールが異なるため、多くの専用ツールを必要とし、容易にスリップ率Sの変更を行うことができない。
そのため、検討したい目標とするスリップ率Sを有するABS制御ユニット2や車両を用意して、それぞれのABS制御ユニット2とタイヤとを組み合わせて制動シミュレーションを行ってABS制動の制動性能を評価している。しかし、ABS制御ユニット2の調達、又は車両の調達などの手間やそれらを制動シミュレーション装置に組み入れる手間などがかかり、ABS制御ユニット2とタイヤの制動性能を評価する作業の作業性の効率を悪化させ、速やかに検討を行うことができない。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−94241号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明は、ABS制御ユニットとタイヤのマッチングによる制動性能を検討するためのABS制動をシミュレーションするときに、ABS制御ユニットの制御パラメータであるスリップ率を容易に設定変更することを可能とする制動シミュレーション装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明の第1の構成として、ABSとタイヤのマッチングにより変化する制動をシミュレーションする制動シミュレーション装置であって、車両の運動を表現する車両モデルと、車両モデルとの情報の受渡しによりタイヤの運動を表現するタイヤモデルとを有するソフトウェアと、車両モデルと情報の受渡しを行う油圧系部品と、車両モデルからの情報に応じて油圧系部品を制御するABS制御ユニットとを有するハードウェアとを備え、車両モデルが有する情報のうち車両モデルから出力される車体速度と車輪回転速度とに応じて補正した補正車輪回転速度をABS制御ユニットに供給する補正手段をさらに備える構成とした。
本発明によれば、補正手段が補正車輪回転速度をABS制御ユニットに供給することで、ABS制御ユニットの制御パラメータを変更しなくても、ABS制御ユニットが、補正車輪回転速度と車体速度に基づいて油圧系部品を制御するため、補正しない車輪回転速度が入力されたときと比べて異なるように油圧系部品を制御することができる。また、同じ車体速度と車輪回転速度でも、補正車輪回転速度が複数の異なるパターンで出力されるように補正手段によって補正されれば、擬似的にABS制御ユニットの制御パラメータを変更したときと同じ効果が得られ、効率よくABSとタイヤのマッチングにより変化する制動のシミュレーションを行うことができ、車両に適したタイヤの選定、及び種々の車両に対してロバスト性の高いタイヤの選定をすることができる。
【0006】
本発明の第2の構成として、ハードウェアは、車両モデルから出力される車体速度に基づき、タイヤモデルとなるタイヤを回転させるタイヤ回転手段と、少なくともタイヤ1輪の前後力を測定する測定手段とを有し、油圧系部品がタイヤの回転を制動し、出力される情報に基づきタイヤモデルを表現する構成とした。
本発明によれば、実際に回転するタイヤを制動させてタイヤモデルを表現させることにより、実車テストに近い制動シミュレーションを行うことができる。また、タイヤ回転手段を車両モデルによって回転が制御される回転ドラムで構成して、回転ドラムに実際のタイヤを接触させてタイヤを回転させれば、実際に路面を走行するタイヤが表現された制動シミュレーションを行うことができ、車両に適したタイヤの選定、及び種々の車両に対してロバスト性の高いタイヤの選定をすることができる。さらに、測定手段が測定するタイヤに作用する力のうち、少なくともタイヤ1輪の前後力が車両モデルに入力されるのでより精度のよい制動シミュレーションを行うことができる。
【0007】
本発明の第3の構成として、補正手段は、車体速度と車輪回転速度に基づいて算出されるスリップ率を補正して補正スリップ率を求めるデータマップを有し、補正スリップ率に基づいて補正車輪回転速度を算出する構成とした。
本発明によれば、補正手段が、スリップ率をデータマップに基づいて補正スリップ率に補正をするので複雑な演算が不要となり、補正にかかる処理速度を高速化させて、容易に補正車輪回転速度を得ることができる。また、データマップにABS制御ユニットの有する制御パラメータのような特性線図を備えれば、実車のABS制御ユニットの制御パラメータに補正を施したようなシミュレーションを行うことができる。
【0008】
本発明の第4の構成として、データマップは、補正手段の算出するスリップ率が0%又は100%のいずれかのときは、補正スリップ率はスリップ率と同じ値に設定される構成とした。
本発明によれば、データマップは、スリップ率が0%のときは補正スリップ率を0%、スリップ率が100%のときは補正スリップ率を100%に補正されるように設定することで、実際の路面でスリップしていないときには、シミュレーション内でもスリップが発生しないように補正を施すことで、実現象に沿った解析が可能になる。つまり、スリップ率が100%とは、車両が停止状態、又は走行中において車輪がロック状態であり、スリップ率が0%とは、スリップしていない状態であるため、この部分では補正をしない。
【0009】
本発明の第5の構成として、データマップは、スリップ率を異なる値の補正スリップ率に補正する複数の補正テーブルを有し、複数の補正テーブルのうちいずれか一つを選択し、選択した補正テーブルによりスリップ率を補正する構成とした。
本発明によれば、データマップが有する複数の補正テーブルから一つを選択し、選択した補正テーブルによりスリップ率を補正するようにしたことで、データマップから順次一つずつ補正テーブルを選択してシミュレーションを行えば、制御パラメータの異なる複数のABS制御ユニットを用意して、シミュレーションをすることと同じになるので、ABS制御ユニットの調達、又はABS制御ユニットを備えた車両の調達などの手間や、ABS制御ユニットを制動シミュレーション装置に設置する手間などが不要となり、ABS制御ユニットとタイヤの制動性能を評価する作業の作業性の効率を向上させ、速やかに検討を行うことができるようになる。
【図面の簡単な説明】
【0010】
【図1】本発明に係る制動シミュレーション装置の概念図。
【図2】本発明に係る制動シミュレーション装置のブロック図。
【図3】本発明に係る補正手段のブロック図。
【図4】本発明に係るスリップ率を補正するデータマップ。
【図5】本発明に係るスリップ率を補正するデータマップの拡大図。
【図6】本発明に係る補正テーブルによるスリップ率の補正例を示す図。
【図7】本発明に係る補正テーブルによるスリップ率の補正例を示す図。
【図8】本発明に係る補正テーブルにより補正されたスリップ率の時間変化を示すグラフ。
【図9】本発明に係る補正スリップ率の移動量に対する制動距離を示すグラフ。
【図10】本発明に係る補正スリップ率の移動量に対する制動力を示すグラフ。
【図11】本発明の実施形態2に係る制動シミュレーション装置の概念図。
【図12】従来の制動シミュレーション装置のブロック図。
【発明を実施するための形態】
【0011】
以下、制動シミュレーション装置の一実施例について説明する。
図1は、制動シミュレーション装置の概念図を示し、図2は、制動シミュレーション装置のブロック図を示し、図3は、補正手段のブロック図を示す。
なお、制動シミュレーション装置は、実際には、制動シミュレーションをする車両の車輪すべてについて制動シミュレーションが行われるが、そのうちの1輪に対応するものについて説明する。
図1に示すように、制動シミュレーション装置は、概略、制動シミュレーションを行うコンピュータ1と、コンピュータ1から出力される信号に基づいて実際に動作するABS制御ユニット2と、ABS制御ユニット2からの情報によって作動する油圧系部品3によって構成される。なお、制動シミュレーションを行うコンピュータ1については後述する。
【0012】
油圧系部品3は、例えば、マスターシリンダ4、ABS油圧ユニット5、ブレーキキャリパ6、ブレーキディスク7などで構成される新車開発、実車装備の油圧系制動部品であって、自動車メーカーなどによりタイヤメーカー側に供給される。
ABS制御ユニット2は、油圧系部品3に付属するものであって、駆動信号Osを出力してブレーキキャリパ6に加わる油圧を制御する。具体的には、ABS制御ユニット2が、タイヤのロック状態を検出したときに、駆動信号Osが出力され、ABS油圧ユニット5内のソレノイドバルブなどを駆動する。この駆動により、マスターシリンダ4によって加圧された油圧が、ブレーキキャリパ6に断続的に加圧、減圧された油圧として作用するように制御される。
ABS制御ユニット2と油圧系部品3は、制動シミュレーションのモデルとなる実際の車両から取り外され、制動シミュレーションのハードウェア15としてのブレーキ試験装置20に取り付けられる。
【0013】
図1のブレーキ試験装置20は、制動試験のベンチテストを行う装置で、制動シミュレーションを行う後述のコンピュータ1が出力する各種情報に基づいて動作し、リアルタイムで行われる制動シミュレーションと同じブレーキの動作を実際に表現するハードウェアである。
マスターシリンダ4とABS油圧ユニット5は、ブレーキ試験装置20の所定の位置に取り付けられる。また、ブレーキキャリパ6は、ブレーキ試験装置20のキャリパ固定部21に取り付けられ、ブレーキディスク7は、後述のコンピュータ1からブレーキ試験装置20に出力される信号に基づいて回転するハブ22に取り付けられることで、ブレーキキャリパ6とブレーキディスク7が、車両に取り付けられた状態が再現される。
【0014】
そして、マスターシリンダ4とABS油圧ユニット5がブレーキ管H1によって接続され、ABS油圧ユニット5とブレーキキャリパ6がブレーキ管H2によって接続されることで実車と同様の油圧系統が形成される。
ブレーキ管H2の一端が接続されるブレーキキャリパ6の接続部8には、キャリパ内の油圧Pwsを検出する圧力センサ9が取り付けられ、この圧力センサ9を介してブレーキ管H2が取り付けられる。この圧力センサ9によって検出される油圧Pwsは、後述のコンピュータ1に出力される。
【0015】
コンピュータ1は、車両モデル11とタイヤモデル12を仮想的に表現するソフトウェア13を実行することで制動シミュレーションが行われ、この制動シミュレーションにより得られる情報は、油圧系部品3とABS制御ユニット2に出力される。
コンピュータ1には、キーボード16などから制動シミュレーションに必要な基本情報や種々の条件が入力される。
基本情報としては、モデルとなる実際の車両のモデル条件が詳細に入力される。例えば、車体寸法、車両重量、前後軸重量、懸架装置の性能情報、制動装置の性能情報である。
次に、制動シミュレーションの環境条件が入力される。例えば、路面の摩擦係数や路面の凹凸や横風などの情報である。
次に、制動シミュレーションの運転条件が入力される。例えば、アクセル操作量、ブレーキ操作量、ハンドル操作量などの情報である。
次に、タイヤのモデルとなる実際のタイヤのモデル条件が詳細に入力される。例えば、性能、寸法、摩擦特性や硬さなどの情報である。
また、コンピュータ1と接続するモニター17には、上記入力された各種情報や、制動シミュレーションにより表現される車両モデル11の動作などがリアルタイムに表示される。
【0016】
車両モデル11は、上記の入力された基本情報や種々の条件に基づいて制動シミュレーションすることで、実際の車両の代わりに車両の運動を表現する。
車両モデル11で得られるタイヤのスリップ率S,車両の上下荷重Fz及び車体速度Vvの情報は、リアルタイムでタイヤモデル12に供給される。また、マスターシリンダ4には、ブレーキ操作量Opを供給し、ABS制御ユニット2には、車輪回転速度Vtを除く各種情報が供給される。また、本発明に係る補正手段10には、車輪回転速度Vtと車体速度Vvが供給される。
なお、車輪回転速度Vtは、タイヤ半径×タイヤの回転する角速度(車軸の回転角速度)によって得られ、例えば制動シミュレーションを行う上での初期条件としては、車両の全てのタイヤが同じ車輪回転速度Vtで与えられる。また、車体速度Vvは、車両のすべてのタイヤから個々に出力される車輪回転速度Vtの平均によって求められる。
【0017】
タイヤモデル12は、コンピュータ1に入力されたタイヤのモデル条件と、車両モデル11から入力されるタイヤのスリップ率S、車両の上下荷重Fz及び車体速度Vvの情報に基づいて、仮想的にタイヤの運動を表現し、ABS制動中における仮想路面上のタイヤ(制動摩擦係数)μを算出してその値を車両モデル11に出力する。
【0018】
マスターシリンダ4は、マスターシリンダ4に取り付けられたアクチュエータ19が車両モデル11から入力されるブレーキ操作量Opの情報に基づいて駆動して油圧を発生させる。
【0019】
ABS制御ユニット2には、車両モデル11から車輪回転速度Vtを除く各種情報が供給される。この情報の中には、実際の車両からABS制御ユニット2に供給する情報と同じ情報が供給される。
また、ABS制御ユニット2は、上記情報と後述の補正手段10により供給される補正車輪回転速度Vctに基づいて、ABS油圧ユニット5に駆動信号Osを出力してブレーキディスク7に対するブレーキキャリパ6の押圧力を制御する。
【0020】
図3は、補正手段10の補正の過程を示すブロック図を示し、同図を用いて補正車輪回転速度Vctの算出方法について説明する。
図3に示すように、補正手段10は、車輪回転速度Vtを補正車輪回転速度Vctに補正するデータマップ30と、車両モデル11から出力される車輪回転速度Vtと車体速度Vvに基づいてタイヤのスリップ率Sを算出するスリップ率算出手段10aと、スリップ率算出手段10aで算出されたスリップ率Sをデータマップ30から選択された補正テーブル(P1〜P5又はM1〜M5のうちのいずれか)に基づいて補正スリップ率S′に補正するスリップ率補正手段10bと、スリップ率補正手段10bで補正された補正スリップ率S′と車体速度Vvに基づいて補正車輪回転速度Vctを算出し、ABS制御ユニット2に補正車輪回転速度Vctを出力する補正車輪回転速度算出手段10cを備える。
【0021】
具体的には、補正手段10では、まず、入力された車輪回転速度Vtと車体速度Vvに基づいてスリップ率Sが次式Aによって算出される。
スリップ率S=(車体速度Vv−車輪回転速度Vt)/車体速度Vv―――A
次に、算出されたスリップ率Sが、所望のスリップ率Sとなるように補正して、補正スリップ率S′が得られるように、図4に示すデータマップ30から、一つの補正テーブル(P1〜P5とM1〜M5のうちからいずれか)を選択する。
次に、選択された補正テーブルP1〜P5と補正テーブルM1〜M5に基づいてスリップ率Sを補正することにより所望の補正スリップ率S′が得られる。
次に、車両モデル11から入力された車体速度Vvと補正スリップ率S′から補正車輪回転速度Vctを算出するために、上記式Aを次式Bのように変形する。
補正車輪回転速度Vct=車体速度Vv×(1.−補正スリップ率S′)―――B
上記式Bにより、補正車輪回転速度Vctを得ることができる。
【0022】
図4は、スリップ率Sから補正スリップ率S′を得るためのデータマップ30を示し、図5は、図4においてスリップ率Sが0%から15%までに対応する範囲のデータマップ30の拡大図を示す。
図4に示すように、データマップ30は、補正手段10の算出するスリップ率Sが0%又は100%のいずれかのときは、補正スリップ率S′はスリップ率Sと同じ値に設定される。つまり、算出されたスリップ率Sが0%と100%のときには、補正を行わないように設定される。
【0023】
これにより、実際の現象としてタイヤがスリップしていないときを示すスリップ率0%と、実際の現象としてタイヤがロック、又は動いていないときを示すスリップ率100%が維持されるので、実際の現象に則した制動シミュレーションを行うことができる。
【0024】
また、データマップ30は、スリップ率Sを異なる値の補正スリップ率S′に補正する複数の補正テーブルP1〜P5と補正テーブルM1〜M5によって構成され、複数の補正テーブルP1〜P5と補正テーブルM1〜M5のうちいずれか一つを選択し、選択した補正テーブルによりスリップ率Sを補正して補正スリップ率S′が得られるようにしている。
【0025】
上記のようにデータマップ30を構成することで、補正テーブルP1〜P5と補正テーブルM1〜M5の一つ一つが擬似的に、異なる制御パラメータを有したABS制御ユニット2を表現することになるので、複数のABS制御ユニット2の調達や車両の調達などの手間や、それらを制動シミュレーション装置に組み入れる手間などが不要となり、車両とタイヤの制動性能を評価する作業において作業効率を向上させて、速やかな検討を行うことができるようになる。
【0026】
なお、本実施例では、補正テーブルP1〜P5と補正テーブルM1〜M5は、補正しない補正テーブルP0をそれぞれ補正スリップ率S′が−5%から+5%の範囲で1%ずつスライドさせた形態である。
【0027】
具体的には、補正テーブルP1は、スリップ率Sが1%から99%までは一定にスリップ率Sを+1%とする補正を行う。また、補正テーブルP2は、スリップ率Sが2%から98%までは一定にスリップ率Sを+2%とする補正を行う。また、補正テーブルP3は、スリップ率Sが3%から97%までは一定にスリップ率Sを+3%とする補正を行う。また、補正テーブルP4は、スリップ率Sが4%から96%までは一定にスリップ率Sを+4%とする補正を行う。また、補正テーブルP5は、スリップ率Sが5%から95%までは一定にスリップ率Sを+5%とする補正を行う。
また、補正テーブルM1は、スリップ率Sが1%から99%までは一定にスリップ率Sを−1%とする補正を行う。また、補正テーブルM2は、スリップ率Sが2%から98%までは一定にスリップ率Sを−2%とする補正を行う。また、補正テーブルM3は、スリップ率Sが3%から97%までは一定にスリップ率Sを−3%とする補正を行う。また、補正テーブルM4は、スリップ率Sが4%から96%までは一定にスリップ率Sを−4%とする補正を行う。また、補正テーブルM5は、スリップ率Sが5%から95%までは一定にスリップ率Sを−5%とする補正を行う。
【0028】
なお、スリップ率Sが0%から10%までの範囲で、補正量が+1%から+5%までの範囲においては、スリップ率Sが補正量をプラスした値まではスリップ率Sが2倍となるように補正スリップ率S′を出力するように設定される。
また、補正する量が−1%から−5%までの範囲においては、スリップ率Sが補正量をマイナスした値まではスリップ率Sが1/2倍となるように補正スリップ率S′を出力するように設定される。
また、スリップ率Sが90%から100%までの範囲で、補正量が+1%から+5%までの範囲においては、スリップ率Sが補正量をプラスした値まではスリップ率Sが1/2倍となるように補正スリップ率S′を出力するように設定される。
また、補正する量が−1%から−5%までの範囲においては、スリップ率Sが補正量をマイナスした値まではスリップ率Sが2倍となるように補正スリップ率S′を出力するように設定される。
【0029】
なお、データマップ30からの補正テーブルP1〜P5と補正テーブルM1〜M5の選択は、制動シミュレーションを実行する前にあらかじめ設定され、一つのABS制御ユニット2とタイヤを組み合わせた制動シミュレーションを行うことができる。また、制動シミュレーション毎に、データマップ30の補正テーブルP1〜P5と補正テーブルM1〜M5の中から選択される補正テーブルを順次変更することで一つのタイヤに対して制御パラメータの異なる複数のABS制御ユニット2を組み合わせた制動シミュレーションを行うことができる。
【0030】
上記構成により、次のような制動シミュレーションがなされることについて、各図を用いて説明する。
コンピュータ1に制動シミュレーションを行う実際のモデルとなる車両の基本情報などのモデル条件と、制動シミュレーションの環境条件と、運転条件が入力され、さらに、データマップ30から補正テーブルが選択される。
【0031】
そして、コンピュータ1により制動シミュレーションが開始されると、ブレーキディスク7がコンピュータ1内の車両モデル11と同じ車輪回転速度Vtで回転する。所定の時間経過後に、車両モデル11は、マスターシリンダ4のアクチュエータ19にABS制動(急ブレーキ)となるようなブレーキ操作量Opを示す信号を出力して、マスターシリンダ4を作動させる。
マスターシリンダ4によって発生した油圧は、ブレーキキャリパ6に伝わりブレーキディスク7を挟み込んでロック状態が作り出される。このとき、コンピュータ内の車両モデル11においても、同様に、ロック状態が表現されている。
ブレーキキャリパ6に生じている油圧が、圧力センサ9により検出されて車両モデル11に油圧Pwsとして入力され、この油圧Pwsと車体速度Vv、制動摩擦係数μなどの情報が車両モデル11からABS制御ユニット2に出力される。これと同時に、補正手段10では、車両モデル11から出力された車体速度Vvと車輪回転速度Vtに基づきスリップ率Sを算出し、このスリップ率Sを最初に設定された補正テーブルにしたがって補正スリップ率S′として補正したのち、補正スリップ率S′と車体速度Vvから補正車輪回転速度Vctを算出してABS制御ユニット2に出力する。
ABS制御ユニット2は、上記油圧Pwsと車体速度Vv、制動摩擦係数μなどの情報と補正車輪回転速度Vctに基づいて、駆動信号OsをABS油圧ユニット5に出力することでブレーキキャリパ6の油圧を制御してABS制動のシミュレーションが実際に表現される。
【0032】
図6は、スリップ率Sが、−5%補正されるように補正テーブルM5を選択したときのデータマップ30の拡大図を示し、図7は、スリップ率Sが、+5%補正されるように補正テーブルP5を選択したときのデータマップの拡大図を示す。
図6に示すように、スリップ率Sが−5%補正されるように補正テーブルM5を選択したときには、算出されたスリップ率Sが10%とすると補正しないときに比べて、補正スリップ率S′は、10%から5%へと5%小さく補正される。つまり、車体速度Vvと車輪回転速度Vtの差、すなわちタイヤのスリップが小さく得られるので強い制動が可能となり、ブレーキキャリパ6に油圧が大きくなるような制御がなされ、結果として制動距離が縮むような制御となる。
図7に示すように、スリップ率Sが+5%補正されるように補正テーブルP5を選択したときには、算出されたスリップ率Sが10%とすると補正を行わないときに比べて、補正スリップ率S′は、10%から15%へと5%大きくスリップしているように補正される。つまり、車体速度Vvと車輪回転速度Vtの差、すなわちタイヤのスリップが大きく得られるので弱い制動が可能となり、ブレーキキャリパ6に油圧が小さくなるような制御がなされ、結果として制動距離が伸びるような制御となる。
【0033】
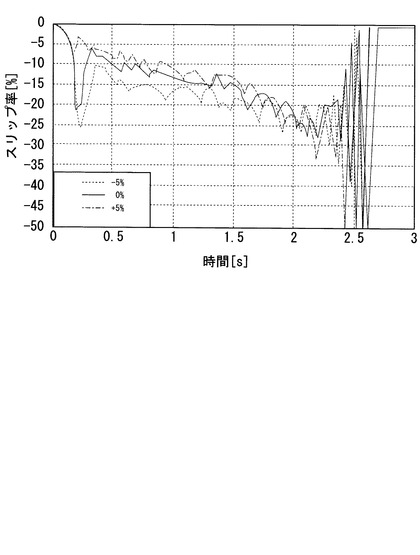
図8は、補正テーブルによりスリップ率Sが時間の経過によりどのように変化するかを検証したグラフで、目標とするスリップ率Sが+5%と−5%されるように補正テーブルP5とM5を選択して制動シミュレーションを行い、補正をしたときのスリップ率Sの時間変化と補正なしのスリップ率Sの時間変化を比較したものである。
図8に示すように、目標とするスリップ率Sが−5%となるように補正テーブルM5を選択したときのスリップ率Sは、補正を行わないときに比べて、全体的にスリップ率Sが小さく表れている。また、目標とするスリップ率Sが+5%となるように補正テーブルP5を選択したときのスリップ率Sは、補正を行わないときに比べて、全体的にスリップ率Sが大きく表れている。つまり、補正テーブルM5,P5によってスリップ率Sが補正スリップ率S′として補正され、算出された補正車輪回転速度VctがABS制御ユニット2に出力された効果が、それぞれ意図する方向に制御されていることを示している。
【0034】
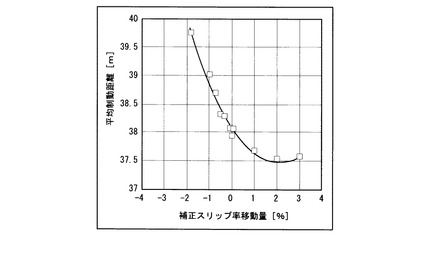
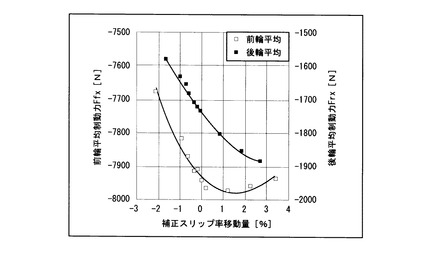
図9及び図10に示すグラフは、ドライ路面において、スリップ率Sが1%刻みで−5%〜+5%の範囲で補正されるように、車体速度Vvが102kmからの全制動の制動シミュレーション行ったときの特徴部分を示すグラフで、図9は、補正スリップ率の移動量に対して車体の制動距離の変化を示すグラフであり、図10は、補正スリップ率の移動量に対して制動摩擦係数μと車両の上下荷重Fzに基づいて算出された前輪側の制動力と後輪側の制動力の変化を示すグラフである。
図9に示すように、補正スリップ率S′の移動量が0%から−2%に移動したときには平均制動距離が1.7m長くなり、+2%に移動したときには平均制動距離が0.5m短くなっている。特に、補正スリップ率S′の移動量が+2%に補正されたときが、平均制動距離が最も短くなる極値となっている。つまり、補正スリップ率の移動量が+2%のときに平均制動距離が最も短くなりその他の範囲では平均制動距離が伸びてしまうことになる。
また、図10に示すように、前輪側の制動力は最適値(極値)を持つことがわかり、後輪側では、補正スリップ率S′の移動量が+側に大きく補正されるほど制動力が大きくなっていることがわかる。これは、ブラックボックスであるABS制御ユニット2内で制御されるスリップ率の制御範囲が、前輪側と後輪側で異なることに起因している。後輪側では、ABS制御ユニット2内でのスリップ率の算出に重要な車体速度を推定するために、スリップ率が小さく制御されるように設定されているため、ABS制御ユニット2内でのスリップ率が大きくなるように補正車輪回転速度Vctを制御するほど制動力が増加することになる。
【0035】
実施形態2
以下、図11を用いて実施形態2について説明する。
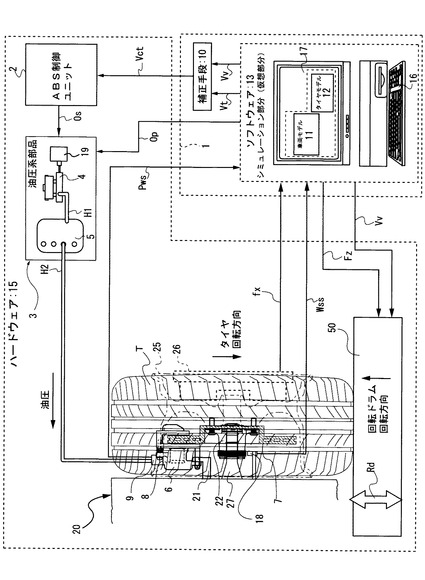
実施形態2は、図11に示すように、実施形態1とほぼ同一構成として、ハードウェア15としての油圧系部品3と油圧系部品3を制御するABS制御ユニット2とブレーキ試験装置20に加えて、実際のタイヤT(実タイヤT)と、タイヤ回転手段としての回転ドラム50又は図外のムービングベルトからなるハードウェアを合わせて使う形態である。
具体的には、実タイヤTをホイール25に組み付けて、タイヤ・ホイールのセットにしてブレーキ試験装置20のハブ22にブレーキディスク7とともに取り付け、このタイヤ・ホイールに対して回転ドラム50を接触させることにより実タイヤTを回転させてタイヤモデル12を表現する。
さらに、ホイール25には、実タイヤTに作用する力fx,fy,fz及びモーメントMx,My,Mzを測定する測定手段としてのホイール6分力計26が取り付けられる。力fxはタイヤTに作用する水平方向の力、すなわちタイヤTが車体に取り付けられたときの前後方向に作用する力であり、力fyはタイヤTが車体に取り付けられたときの車軸方向に作用する力であり、力fzはタイヤTに作用する鉛直方向の力、すなわち、タイヤTが車体に取り付けられたときの上下方向に作用する力である。また、モーメントMxはタイヤTが車体に取り付けられたときの前後方向の軸周りに作用するモーメントであり、モーメントMyはタイヤTが車体に取り付けられたときの車軸周りに作用するモーメントであり、モーメントMzはタイヤTが車体に取り付けられたときの鉛直軸周りに作用するモーメントである。
なお、タイヤTに作用する力を測定するためにホイール6分力計26をホイール25に装着するとしたが、ハブ22を支持する軸27にセンサを取り付けて、軸27に作用する上記力fx,fy,fz及びモーメントMx,My,Mzを測定するようにしてもよい。
本実施形態2では、ホイール6分力計26により測定される力のうち、力fxが制動シミュレーションの車両モデル11に入力される。このように少なくともタイヤ1輪の前後力が制動シミュレーションに入力されることで精度のよいシミュレーションができるようになる。
また、ハブ22は実施形態1のようにコンピュータ1からブレーキ試験装置20に出力される信号に基づいて回転しない。
【0036】
実タイヤTは、タイヤモデル12としてモデル条件、例えば、性能、寸法、摩擦特性や硬さなどの情報がコンピュータ1に入力される実際のタイヤである。
回転ドラム50は、ブレーキ試験装置20に取り付けられた実タイヤTと接触するように実タイヤTの下方に位置し、車両モデル11から出力される車体速度Vvに基づいて回転が制御される。さらに車両モデル11で表現される車両の上下荷重Fzに対応するように実タイヤTに荷重Rdを負荷するように回転ドラムが上下し、さらに実タイヤTに対して回転ドラム50が角度を有するように動作させる図外の可動手段を備える。なお、タイヤ回転手段は、回転ドラム50でなく、環状に形成されたベルトを回転させるムービングベルトであってもよい。
【0037】
上記構成によれば、回転ドラム50の回転が、車両モデル11の出力する車体速度Vvとなるように制御されることで、実際の路面(実路面)を表現することができ、この回転ドラム50を実路面とみなして実タイヤTに押圧して荷重Rdを負荷させつつ回転させることにより、実タイヤTが路面を走行している状態を表現することができるようになる。
さらに、回転ドラム50が、車両モデル11の出力する上下荷重Fzに基づいて実タイヤTと接触する力を制御されれば、実タイヤTに作用する荷重Rdを表現することができ、ホイール6分力計26によって測定される実タイヤTに作用する力のうち、実タイヤTの前後方向に作用する力fxが車両モデル11に入力されるのでより正確な制動シミュレーションを行うことができる。
また、回転ドラム50を実タイヤTに対して角度をつけて回転させれば、実タイヤTが路面に対して旋回しているときの状態を表現することができる。
【0038】
上記構成により、次のような制動シミュレーションを行うことができる。例えば、実施形態1に示した制動シミュレーションのタイヤモデル12のうち一輪を実タイヤTと回転ドラム50により表現し、ホイール6分力計26で測定した実タイヤTに作用する前後の力fxを車両モデル11の情報として入力して制動シミュレーションを行うものである。
まず、コンピュータ1に制動シミュレーションを行う実際のモデルとなる車両の基本情報などのモデル条件と、制動シミュレーションの環境条件と、運転条件が入力され、さらに、データマップ30から補正テーブルが選択される。
【0039】
そして、コンピュータ1により制動シミュレーションが開始されると、車両モデル11の出力する車体速度Vvとなるように回転ドラム50が回転する。
次に、回転ドラム50は、実タイヤTと接触するように上方に移動して、車両モデル11の出力する上下荷重Fzとなるように実タイヤTに荷重Rdを加える。これにより、実タイヤTとともにブレーキディスク7が回転する。
実タイヤTの回転は、実タイヤTが取り付けられたハブ22の実車輪速Wssを車輪速センサ18により測定し、この実車輪速Wssが車両モデル11に出力され、実タイヤTに作用する力は、ホイール6分力計26で測定され、測定された力のうち前後方向の力Fxが車両モデル11に逐次入力される。
次に、所定の時間経過後に、車両モデル11は、マスターシリンダ4のアクチュエータ19にABS制動(急ブレーキ)となるようなブレーキ操作量Opを示す信号を出力して、マスターシリンダ4を作動させる。
マスターシリンダ4によって発生した油圧は、ブレーキキャリパ6に伝わりブレーキディスク7を挟み込んで車両モデル11にロック状態が作り出される。このとき、実タイヤTにもロック状態となる。
次に、ブレーキキャリパ6に生じている油圧が、圧力センサ9により検出されて車両モデル11に油圧Pwsとして入力され、この油圧Pwsと車体速度Vv、制動摩擦係数μなどの情報が車両モデル11からABS制御ユニット2に出力される。これと同時に、補正手段10では、車両モデル11から出力された車体速度Vtと実車輪速Wssに基づきスリップ率Sを算出し、このスリップ率Sを最初に設定された補正テーブルにしたがって補正スリップ率S′として補正したのち、補正スリップ率S′と車体速度Vvから補正車輪回転速度Vctを算出してABS制御ユニット2に出力する。
ABS制御ユニット2は、上記油圧Pwsと車体速度Vv、制動摩擦係数μなどの情報と補正車輪回転速度Vctに基づいて、駆動信号OsをABS油圧ユニット5に出力することでブレーキキャリパ6の油圧を制御してABS制動のシミュレーションが実際に表現される。
【0040】
以上説明したように、実施形態2のように構成することで、より実車テストに近い制動シミュレーションを行うことができるようになるので、制動時や旋回時の実タイヤの摩耗状態などについての情報を得ることができ、車種毎に最適なタイヤ及び、種々の車両に装着される市販用(補修用)タイヤを選定するための制動シミュレーションがより精度良く行えるようになる。
また、実施形態2の説明において、タイヤモデル12のうち一輪を実タイヤTと回転ドラム50により表現したが、2輪でも4輪でもよい。タイヤモデル12の全ての車輪を実タイヤTと回転ドラム50によって表現すれば、より実車テストに近く精度のよい制動シミュレーションを行うことができる。
なお、ホイール6分力計26の測定する力のうち、力fxを車両モデル11に入力するとしたが、測定される全ての力fx,fy,fz及びモーメントMx,My,Mzのうち少なくとも力fxと他の力又はモーメントを組み合わせて車両モデル11に入力するようにしてもよく、測定されるすべての情報が車両モデル11に入力されることでより精度のよい制動シミュレーションを行うことができるようになる。さらに上記測定される力及びモーメントを車両モデル11に入力するとしたがタイヤモデル12にも入力するようにして制動シミュレーションを行ってもよい。
【0041】
上記実施形態1及び2において、補正手段10の備えるデータマップ30は、上記構成のような複数の補正テーブルの特性線を備える構成だけでなく、他の特性線で表されてもよく、また補正を行う特性線の数も上記に示した数以外によって構成されてもよい。
また、補正手段10から出力される補正車輪回転速度Vctが各車輪毎に出力されるとして説明をしたが、例えば、前輪側のみ補正車輪回転速度Vctを出力したり、後輪側のみ補正車輪回転速度Vctを出力したりするようにしてもよい。
また、コンピュータ1のソフトウェア13による制動シミュレーションに基づいて実際に動作するハードウェア15の構成も、油圧系部品3は、マスターシリンダ4、ABS油圧ユニット5、ブレーキキャリパ6、ブレーキディスク7だけでなくてもよく、さらに実タイヤTと回転ドラム50以外にも制動シミュレーションと同期して動作する懸架装置などのハードウェアが設けられてもよい。
【符号の説明】
【0042】
1 コンピュータ、2 ABS制御ユニット、3 油圧系部品、
4 マスターシリンダ、5 ABS油圧ユニット、6 ブレーキキャリパ、
7 ブレーキディスク、9 圧力センサ、10 補正手段、11 車両モデル、
12 タイヤモデル、13 ソフトウェア、15 ハードウェア、
16 キーボード、20 ブレーキ試験装置、21 キャリパ固定部、22 ハブ、
25 ホイール、26 ホイール6分力計、27 軸、30 データマップ、
50 回転ドラム、S スリップ率、S′ 補正スリップ率、
Vct 補正車輪回転速度、Vt 車輪回転速度、Vv 車体速度、
Fz 車両の上下荷重、Op ブレーキ操作量、Os 駆動信号、Pws 油圧、
μ 制動摩擦係数、M1〜M5,P1〜P5 補正テーブル、T 実タイヤ。
【特許請求の範囲】
【請求項1】
ABSとタイヤのマッチングにより変化する制動をシミュレーションする制動シミュレーション装置であって、
車両の運動を表現する車両モデルと、前記車両モデルとの情報の受渡しによりタイヤの運動を表現するタイヤモデルとを有するソフトウェアと、
前記車両モデルと情報の受渡しを行う油圧系部品と、前記車両モデルからの情報に応じて前記油圧系部品を制御するABS制御ユニットとを有するハードウェアとを備え、
前記車両モデルが有する情報のうち前記車両モデルから出力される車体速度と車輪回転速度とに応じて補正した補正車輪回転速度を前記ABS制御ユニットに供給する補正手段をさらに備えることを特徴とする制動シミュレーション装置。
【請求項2】
前記ハードウェアは、前記車両モデルから出力される車体速度に基づき、前記タイヤモデルとなるタイヤを回転させるタイヤ回転手段と、
少なくともタイヤ1輪の前後力を測定する測定手段とを有し、
前記油圧系部品が前記タイヤの回転を制動し、出力される情報に基づきタイヤモデルを表現することを特徴とする請求項1に記載の制動シミュレーション装置。
【請求項3】
前記補正手段は、前記車体速度と前記車輪回転速度に基づいて算出されるスリップ率を補正して補正スリップ率を求めるデータマップを有し、前記補正スリップ率に基づいて前記補正車輪回転速度を算出することを特徴とする請求項1又は請求項2に記載の制動シミュレーション装置。
【請求項4】
前記データマップは、前記補正手段の算出する前記スリップ率が0%又は100%のいずれかのときは、前記補正スリップ率は前記スリップ率と同じ値に設定されることを特徴とする請求項3に記載の制動シミュレーション装置。
【請求項5】
前記データマップは、前記スリップ率を異なる値の補正スリップ率に補正する複数の補正テーブルを有し、前記複数の補正テーブルのうちいずれか一つを選択し、選択した補正テーブルにより前記スリップ率を補正することを特徴とする請求項3又は請求項4に記載の制動シミュレーション装置。
【請求項1】
ABSとタイヤのマッチングにより変化する制動をシミュレーションする制動シミュレーション装置であって、
車両の運動を表現する車両モデルと、前記車両モデルとの情報の受渡しによりタイヤの運動を表現するタイヤモデルとを有するソフトウェアと、
前記車両モデルと情報の受渡しを行う油圧系部品と、前記車両モデルからの情報に応じて前記油圧系部品を制御するABS制御ユニットとを有するハードウェアとを備え、
前記車両モデルが有する情報のうち前記車両モデルから出力される車体速度と車輪回転速度とに応じて補正した補正車輪回転速度を前記ABS制御ユニットに供給する補正手段をさらに備えることを特徴とする制動シミュレーション装置。
【請求項2】
前記ハードウェアは、前記車両モデルから出力される車体速度に基づき、前記タイヤモデルとなるタイヤを回転させるタイヤ回転手段と、
少なくともタイヤ1輪の前後力を測定する測定手段とを有し、
前記油圧系部品が前記タイヤの回転を制動し、出力される情報に基づきタイヤモデルを表現することを特徴とする請求項1に記載の制動シミュレーション装置。
【請求項3】
前記補正手段は、前記車体速度と前記車輪回転速度に基づいて算出されるスリップ率を補正して補正スリップ率を求めるデータマップを有し、前記補正スリップ率に基づいて前記補正車輪回転速度を算出することを特徴とする請求項1又は請求項2に記載の制動シミュレーション装置。
【請求項4】
前記データマップは、前記補正手段の算出する前記スリップ率が0%又は100%のいずれかのときは、前記補正スリップ率は前記スリップ率と同じ値に設定されることを特徴とする請求項3に記載の制動シミュレーション装置。
【請求項5】
前記データマップは、前記スリップ率を異なる値の補正スリップ率に補正する複数の補正テーブルを有し、前記複数の補正テーブルのうちいずれか一つを選択し、選択した補正テーブルにより前記スリップ率を補正することを特徴とする請求項3又は請求項4に記載の制動シミュレーション装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2010−276446(P2010−276446A)
【公開日】平成22年12月9日(2010.12.9)
【国際特許分類】
【出願番号】特願2009−128597(P2009−128597)
【出願日】平成21年5月28日(2009.5.28)
【出願人】(000005278)株式会社ブリヂストン (11,469)
【Fターム(参考)】
【公開日】平成22年12月9日(2010.12.9)
【国際特許分類】
【出願日】平成21年5月28日(2009.5.28)
【出願人】(000005278)株式会社ブリヂストン (11,469)
【Fターム(参考)】
[ Back to top ]