
制動デバイスを備えた自動車用制動システムを制御する方法及び装置
【課題】制動デバイスを備えた自動車用制動システムを制御する方法及び装置の提供。
【解決手段】制動システムが制動デバイス40を備え、制動デバイス40が油圧制動ユニット41と回生制動ユニット42とを備え、かつブレーキペダル10の作動度と制動システムの特性を検出するように設計されている方法であって、制動システムの検出された特性に基づき、油圧制動ユニット41の油圧制動力特性曲線を計算するステップと、所定の基準に基づきかつ計算された油圧制動力特性曲線に応じて特性マップから回生制動ユニット42の発電機ベース制動力特性曲線を選択するステップと、計算された油圧制動力特性曲線と選択された発電機ベース制動力特性曲線に基づき、ブレーキペダル10の検出された作動度に従い油圧制動ユニット41と回生制動ユニット42を制御するステップとを含む。
【解決手段】制動システムが制動デバイス40を備え、制動デバイス40が油圧制動ユニット41と回生制動ユニット42とを備え、かつブレーキペダル10の作動度と制動システムの特性を検出するように設計されている方法であって、制動システムの検出された特性に基づき、油圧制動ユニット41の油圧制動力特性曲線を計算するステップと、所定の基準に基づきかつ計算された油圧制動力特性曲線に応じて特性マップから回生制動ユニット42の発電機ベース制動力特性曲線を選択するステップと、計算された油圧制動力特性曲線と選択された発電機ベース制動力特性曲線に基づき、ブレーキペダル10の検出された作動度に従い油圧制動ユニット41と回生制動ユニット42を制御するステップとを含む。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は制動デバイスを備えた自動車用制動システムを制御する方法及び装置に関する。
【背景技術】
【0002】
(特許文献1)は、自動車、特にハイブリッド車両を操作するための方法に関する。この方法では自動車の制動操作中の全制動トルクは、自動車の少なくとも1つの電気機械によって少なくとも部分的に提供される。ここで、全制動トルクのうち電気機械によって少なくとも部分的に提供されていたトルクが提供されなくなる時間が決定される。
【0003】
(特許文献2)は、自動車の制動システムを制御する方法、具体的には複数の摩擦ブレーキと自動車用発電機とを備える回生制動システムを制御する方法及びこの方法を制御するソフトウェアモジュールを記載する。本文献に記載された制動システムを制御するための方法において、電気的に制御可能な発電機及び複数の油圧摩擦ブレーキがパラレル構成で使用される。ここで、発電機の設定値制動トルクは、全設定値減速度を決定することによって決定される。発電機は前記設定値制動トルクに基づいて制御される。
【0004】
(特許文献3)は、発電機と多数の油圧摩擦ブレーキとを備える制動システムを制御する方法を記載する。記載された制御方法は回生制動動作と油圧摩擦ブレーキによる制動動作を含む。ここで、車両操作点の監視もまた行われ、支配的な制動トルクの決定が行われ、回生制動動作の決定及び摩擦ブレーキの作動が行われる。
【0005】
(特許文献4)は、少なくとも電気モータによって駆動される車両のアンチロック制動システムを起動するための方法及びシステムに関する。本文献に記載の方法は、運転上の安全性を改善するために、及びタイヤのトレッドに対する摩耗を低減するために提供されている。この方法は、車両の実際の速度と車両のドライブトレインの駆動要素の速度とを比較することによって、車両の少なくとも1つのホイールがロックし始めたことを自動的に識別することを含む。車両のホイールの少なくとも1つがロックし始めたことが検出されたことに基づいて、車両のホイールがさらにロックすることを防止するために、当該システムによる回生制動が周期的に調節される。
【0006】
(特許文献5)は、運動エネルギーの回収が可能な電気車両の制動システムを記載する。本文献に記載の制動システムにおいて、電気車両の運転者に、油圧ブレーキシステムが使用されている印象を与えるために、フィードバック力発生器が提供される。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】独国特許出願公開第10 2009 039 347 A1号明細書
【特許文献2】米国特許出願公開第2006/0220452 A1号明細書
【特許文献3】米国特許出願公開第2009/0118887 A1号明細書
【特許文献4】国際公開第2010/049945 A1号パンフレット
【特許文献5】米国特許出願公開第2004/0251095 A1号明細書
【発明の概要】
【発明が解決しようとする課題】
【0008】
以上の背景の下、本発明は自動車用制動システムを制御する方法及び装置を提供するという目的に基づく。本方法により、自動車の制動システムを、制動システムの特性に最も適合した方法で操作することが可能になる。
【課題を解決するための手段】
【0009】
前記目的は、本発明の、特許請求項1の特徴を有する制動デバイスを備えた自動車用制動システムを制御する方法によって、及び特許請求項8の特徴を有する自動車用制動システムを制御する対応する装置によって達成される。
【0010】
すなわち、前記方法は、自動車用制動システムを制御する方法であって、この制動システムが制動デバイスを備え、この制動デバイスが油圧制動ユニットと回生制動ユニットとを備え、かつブレーキペダルの作動度と制動システムの少なくとも1つの特性とを検出するように設計されている方法が提案される。本方法は、制動システムの少なくとも1つの検出された特性に基づき、油圧制動ユニットの油圧制動力特性曲線を計算するステップと、所定の基準に基づきかつ計算された油圧制動力特性曲線に応じて特性マップから回生制動ユニットの発電機ベース制動力特性曲線を選択するステップと、計算された油圧制動力特性曲線と選択された発電機ベース制動力特性曲線とに基づき、ブレーキペダルの検出された作動度に従い油圧制動ユニットと回生制動ユニットを制御するステップとを含む。
【0011】
同様に、前記装置は、自動車用制動システムを制御する装置であって、油圧制動ユニットと回生制動ユニットとを備える制動デバイスを備え、この制動デバイスがブレーキペダルの作動度と制動システムの少なくとも1つの特性とを検出するように設計された装置が、本発明により提案される。ここで、この制動デバイスは、制動システムの少なくとも1つの検出された特性に基づき油圧制動ユニットの油圧制動力特性曲線を計算し、そして、所定の基準に基づきかつ計算された油圧制動力特性曲線に応じて特性マップから回生制動ユニットの発電機ベース制動力特性曲線を選択するように設計される。油圧制動ユニットと回生制動ユニットは、計算された油圧制動力特性曲線と選択された発電機ベース制動力特性曲線に基づき、検出されたブレーキペダルの作動度に従い制御可能である。
【0012】
本発明の目的は、発電機ベースの減速中に回生によって得られる電気エネルギーの最大限の利用を実現すること、及び自動車の油圧供給ブレーキの各部品公差又は他の変動要因を考慮して、最大の回生エネルギーを得るように制動システムを最適化することにある。
【0013】
本発明は、発電機ベースの減速によって得られる電気エネルギーが最大化されるという点で従来技術より優れている。
【0014】
また、本発明によると、ブレーキの無効な移動がより少ない便利なシステムが実現できるという利点も結果として得られる。すなわち、このシステムによって、ブレーキペダル特性曲線は、発電機ベースの減速部分が、運転者が追加的にわずかにペダルを踏み込むだけで油圧制動に切り替わるように適合される。
【0015】
従属項は特許請求項1に特定される方法の、及び特許請求項8に特定される装置の有利な実施形態及び改善形態に関する。
【0016】
本発明の方法の好ましい実施形態において、制動システムの少なくとも1つの検出される特性として、油圧制動ユニットの制動力が発生し始めるブレーキペダルの作動度が用いられる。
【0017】
本方法のさらに好ましい実施形態において、回生制動ユニットの発電機ベース制動力特性曲線の選択に関して、発電機ベース制動力特性曲線の、ブレーキペダル特性曲線図に出現する平坦領域が最小化されるという基準が用いられる。
【0018】
本方法のさらに好ましい実施形態において、回生制動ユニットの発電機ベース制動力特性曲線の選択に関して、回生制動ユニットのエネルギー回収のエネルギー効率が最大化されるという基準が用いられる。
【0019】
本方法のさらに好ましい実施形態において、制動システムの少なくとも1つの検出される特性は、自動車が始動されると検出される。
【0020】
本方法のさらに好ましい実施形態において、制動システムの少なくとも1つの検出される特性は、自動車のブレーキペダルを踏み込むと検出される。
【0021】
本方法のさらに好ましい実施形態において、制動システムの少なくとも1つの検出される特性は、自動車の運転中の任意の時間間隔において、それぞれ新たに検出される。これにより、有利には、油圧制動ユニットの制動挙動の変化を検出すること、及びそれに応じて回生制動ユニットの制動力を適合することが可能になる。
【0022】
装置の好ましい実施形態において、制動デバイスは、検出される制動システムの特性として、油圧制動ユニットの制動力が発生し始めるブレーキペダルの作動度を用いるように設計される。
【0023】
以上によって発電機ベースの制動と機械的な制動とのエネルギー効率の良い組み合わせが可能になる。
【0024】
本発明の装置のさらに好ましい実施形態において、制動デバイスは、回生制動ユニットの発電機ベース制動力特性曲線の選択によって、発電機ベース制動力特性曲線の、ブレーキペダル特性曲線図に出現する平坦領域を最小化するように設計される。
【0025】
本装置のさらに好ましい実施形態において、制動デバイスは、回生制動ユニットの発電機ベース制動力特性曲線の選択によって、回生制動ユニットのエネルギー回収のエネルギー効率を最大化するように設計される。
【0026】
本装置のさらに好ましい実施形態において、制動デバイスは、自動車を始動すると検出される、制動システムの少なくとも1つの特性を検出するように設計される。特に、本方法において、運転者に一切感知されることなく、油圧制動ユニットの油圧制動力特性曲線を検出することが可能になる。
【0027】
本装置のさらに好ましい実施形態において、制動デバイスは、自動車のブレーキペダルを踏み込むと検出される、制動システムの少なくとも1つの特性を検出するように設計される。油圧制動ユニットの特性の検出によって、摩耗に誘発される油圧制動力特性曲線の変化が制動システムのエネルギー効率の低下を招くという状況を回避できる。
【0028】
本発明の実施形態のさらなる特徴及び利点が、添付図面を参照する以下の説明から明らかになる。
【図面の簡単な説明】
【0029】
【図1】自動車用制動システムを制御するための本発明による方法の実施形態を表すフローチャートを示す。
【図2】自動車用制動システムを制御するための本発明による装置の実施形態の概略図を示す。
【図3】本発明のさらなる実施形態による、自動車用制動システムのブレーキペダル特性曲線を描いたブレーキペダル特性曲線図を示す。
【図4】本発明のさらなる実施形態による、自動車用制動システムのブレーキペダル特性曲線を描いたブレーキペダル特性曲線図を示す。
【図5】本発明のさらなる実施形態による、自動車用制動システムのブレーキペダル特性曲線を描いたブレーキペダル特性曲線図を示す。
【発明を実施するための形態】
【0030】
図面において、同一及び機能的に同一の要素、特徴並びに部品は、別段の記載がない限り、それぞれ同じ参照符号で示される。明瞭さかつ分かりやすさのため、図面中の部品及び要素は互いに対して一定の縮尺で描かれる必要はないということも自明である。
【0031】
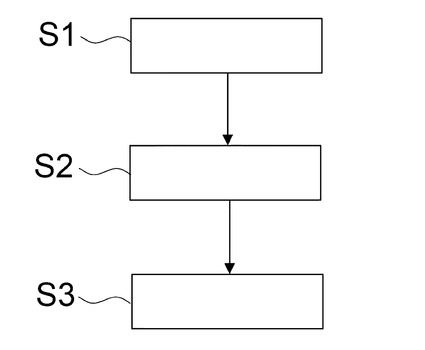
図1は自動車用制動システムを制御するための本発明による方法の実施形態を表すフローチャートを示す。
【0032】
本明細書に記載される方法は、制動システムの信頼性の高い制御に適している。
【0033】
ステップS1において、油圧制動ユニット41の油圧制動力特性曲線B2が、検出された制動システム特性に基づいて計算される。そのため、ステップS1において、油圧制動ユニット41のブレーキライニングがブレーキディスク20に接触する時のブレーキペダルの移動量を算出できるようになっている。その時からさらにペダルを作動させると、制動圧力の連続的な増加がもたらされ、油圧制動ユニット41が有効になる。発電機ベースの制動に機械式制動が重畳すると、利用可能な回生エネルギーが失われる。
【0034】
ステップS2において、回生制動ユニット42の発電機ベース制動力特性曲線が、所定の基準に基づき、計算された油圧制動力特性曲線B2に応じて特性曲線マップから選択される。回生トルクが大きくなるほど、制動システムのエネルギー回収はより効率的になる。
【0035】
ステップS3において、油圧制動ユニット41と回生制動ユニット42とが、計算された油圧制動力特性曲線B2と選択された発電機ベース制動力特性曲線G4とに基づき、ブレーキペダル10の検出された作動度に従い制動システムによって制御される。
【0036】
その後、ステップS1とS2は、運転操作中、何度でも繰り返すことができる。
【0037】
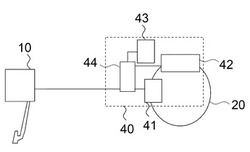
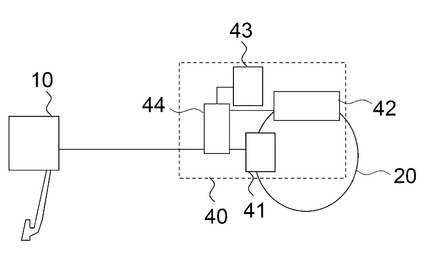
図2は自動車用制動システムを制御するための本発明による装置の実施形態の概略図を示す。制動システムは制動デバイス40を含む。制動デバイス40はブレーキディスク20を備えた油圧制動ユニット41と、制御ユニット44と、回生制動ユニット42とを備え、かつ、ブレーキペダル10の作動度及び制動システムの少なくとも1つの特性を検出するように設計される。
【0038】
制動デバイス40は、例えば、制動システムの検出された特性に基づき、油圧制動ユニット41の油圧制動力特性曲線B2を計算するように設計される。制動デバイス40はまた、制動デバイス40の特性マップメモリ43に記憶された特性マップから、パラメータtによって決定される回生制動ユニット42の発電機ベース制動力特性曲線G1〜G4を選択するために、使用されることもある。
【0039】
例えば、油圧制動ユニット41及び回生制動ユニット42は、油圧制動力特性曲線B1、B2、B3及び発電機ベース制動力特性曲線G1〜G4に基づき、ブレーキペダル10の検出された作動度に従い制動デバイス40によって制御可能である。
【0040】
回生制動ユニット42は、例えば、起電力ブレーキとして設計されるか、さもなければ発電機ブレーキとして設計されるか、又は制動の間発電機として使用される電気駆動モータとして設計される。
【0041】
制御ユニット44は、制動システムを制御又は統制するための、プログラマブルコントローラとして、又は何らかの他の方法でデジタル式にプログラム可能な制御器として設計されてもよい。
【0042】
油圧制動ユニット41は、例えばディスクブレーキとして又は他のブレーキとして設計される。油圧制動ユニットでは、ホイールハブに固定されたブレーキディスク20によって及びブレーキキャリパーに設置されたブレーキライニングを備えたブレーキパッドによって、自動車の減速が生じる。
【0043】
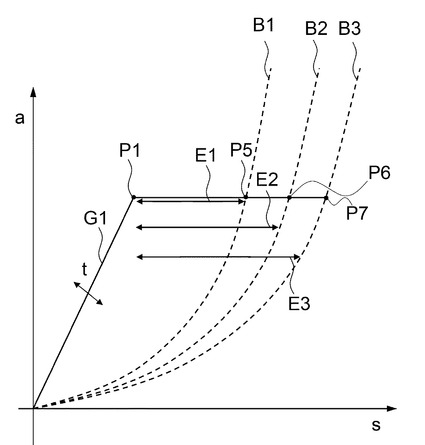
図3は本発明のさらなる実施形態による、自動車用制動システムのブレーキペダル特性曲線のブレーキペダル特性曲線図を示す。
【0044】
ブレーキペダル移動量すなわちブレーキペダル10の踏み込み度が横軸に示され、英文字sで表されている。aによって表される縦軸は自動車の減速度の大きさを示す。
【0045】
発電機ベースの制動及び機械的な制動は制動システムによって制御される。回生制動ユニット42の発電機ベースの制動では、ブレーキペダル10の各位置に対応する減速度は再現性があるが、そのような一定の関係は油圧制動ユニット41による機械的な制動の場合にあっては存在しない。
【0046】
例えば、停止プロセスの間も、発電機ベースの制動動作の減少が生じ得る。これは機械的な制動によって補償されなければならない。これは例えば運転者が後に続けて行うブレーキペダルの踏み込みによって行われるか、又は制動システムの油圧アセンブリの対応する制御を介して制動システムによって実現されてもよい。これにより、例えば、回生制動ユニット42の発電機ベースの制動力が減少するにつれて、油圧制動ユニット41の機械的な制動の減速度が増大することが可能になる。
【0047】
図3はさらに点線によって、量産車の、部品公差の結果である、油圧制動ユニット41の制動力特性曲線を示す異なる油圧制動力特性曲線B1、B2、B3を表す。これは、部品公差の極値としての制動力特性曲線B1及びB3によって、また部品公差の平均値としての制動力特性曲線B2によって表されるように、油圧制動ユニット41の挙動の違いをもたらす。
【0048】
同様にブレーキペダル特性曲線図に表されるのは、発電機ベース制動力特性曲線G1である。この曲線は、電気機械が発電機として運転することによって生成され、特性曲線点P1で曲がり、そこから、各油圧制動力特性曲線B1、B2、B3に応じて異なる水平な平坦領域E1、E2、E3が伸びる。ここで、油圧制動力特性曲線B1、B2、B3の発電機ベース制動力特性曲線G1との交差点は特性曲線点P5、P6及びP7として表示される。
【0049】
しかしながら、前記水平な平坦領域E1、E2、E3が伸びるほど、この領域が運転者によって感知されるリスクが高まる。
【0050】
従って、本発明の方法によって使用される基準として、制動動作の発電機ベース制動挙動要素、すなわち、制動力特性曲線G1の直線上昇領域の傾きt、及び点P1の位置が可変とされるようになっている。
【0051】
このため、第一に、油圧制動力特性曲線B2上の特性曲線点が決定される。この特性曲線点において、油圧制動ユニット41のブレーキライニングが接触を始める。すなわち自動車の油圧制動ユニット41が対応する制動力を提供する。
【0052】
前記特性曲線点を越えると、実質的に油圧制動ユニット41によってのみ制動が行われる。
【0053】
前記決定は、例えば自動車を始動すると実行される。なぜならハイブリッド車両は通常自動変速機を装備し、従って自動車の始動時、ブレーキペダル10の踏み込みが最初に要求されるからである。
【0054】
次に、回生制動ユニット42の電気機械の発電機ベース作動、具体的には直線G1の傾きt及び特性曲線点P1の位置が、以下のように設定される。すなわち、第一に、回生制動ユニット42の最大制動力を構成する特性曲線点P1が、決定された特性曲線点P5、P6又はP7より確実に先に来るように設定される。なぜなら、前記特性曲線点P5、P6又はP7において、自動車の油圧制動ユニット41は作動を始めるからである。
【0055】
図4は、本発明のさらなる実施形態による自動車用制動システムのブレーキペダル特性曲線のブレーキペダル特性曲線図を示す。
【0056】
図3と同様、ブレーキペダル移動量sは横軸に表示され、aで示される縦軸は自動車の減速度の大きさを示す。
【0057】
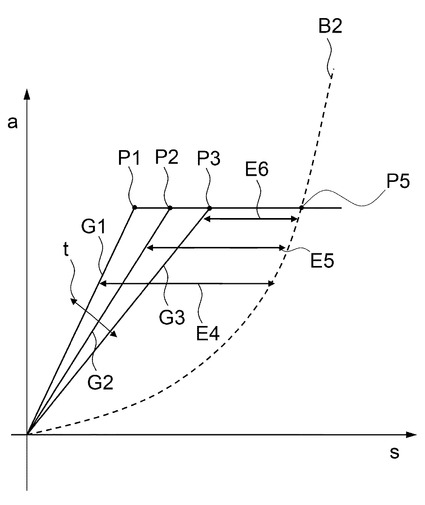
ブレーキペダル特性曲線図は、平坦領域E4〜E6を有する異なる発電機ベース制動力特性曲線G1〜G3を表す。特性曲線G1〜G3は、発電機ベース制動力特性曲線G1〜G3の直線上昇領域の傾きtが異なり、従って平坦領域E4〜E6の長さが変化する。発電機ベース制動力特性曲線G1〜G3の直線領域と平坦領域E4〜E6との間の移行は、特性曲線点P1〜P3で表される。
【0058】
例えば、制動システムに用いられる基準は、平坦領域E4〜E6の長さを最小化することにあってもよい。しかしながら万一、油圧制動ユニット41の発電機ベース制動力の開始の、公差によって引き起こされる誤計算があった場合には、未利用部分が残る可能性があり、従って制動システムのエネルギー効率は落ちる可能性がある。
【0059】
図5は、本発明のさらなる実施形態による自動車用制動システムのブレーキペダル特性曲線を有するブレーキペダル特性曲線図を示す。
【0060】
図3及び4と同様、ブレーキペダル移動量は横軸に表示され、aで示される縦軸は自動車の減速度の大きさを示す。
【0061】
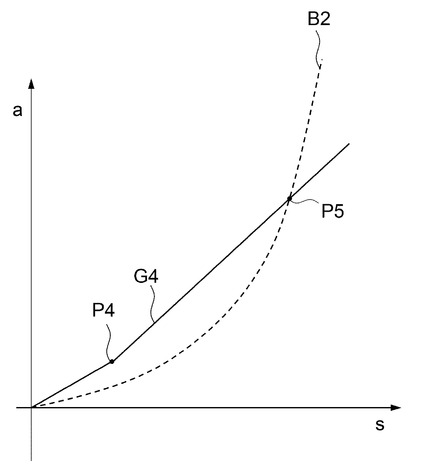
図3及び4で示される例とは対照的に、示される発電機ベース制動力特性曲線G4は、異なる傾きで直線状に上昇しかつ特性曲線点P4で分割される2つの領域を有する。例えば、制動力特性曲線G4の比較的緩やかな傾きの第1領域と比較的急な傾きの第2領域とへのかかる分割の結果、運転者が感知する発電機ベース制動力特性曲線の無効な移動を延ばす必要がもはやなくなる。
【0062】
特性曲線点P5において、発電機ベース制動力特性曲線G4は油圧制動力特性曲線B2と交差する。変化する運転状況も考慮に入れることができるように、自動車の走行中に、前記点P5の決定を再実行してもよい。これによって、さらに、例えば発電機ベース制動力特性曲線G1〜G4の傾きt及び点P5の位置を再設定することが可能となる。制動システムで基準として用いられるような、平坦領域の最小化は、例えば、図5の発電機ベース制動力特性曲線G4で示されているように、平坦領域E4〜E6の長さをゼロに短縮することを含む。従って、かかる制動力特性曲線G4には無効な移動がなく、運転者は、ペダル特性曲線の全範囲にわたり、ブレーキペダル10の作動度の増大とともに連続的に増大する制動トルクを感じる。
【0063】
図5は、本発明のさらなる実施形態による自動車用制動システムのブレーキペダル特性曲線に関するブレーキペダル特性曲線図を示す。
【0064】
本発明を好ましい例示的実施形態に基づき記載してきたが、本発明はそれらに制限されることはなく、様々な方法で変更可能である。特に上述の改良形態及び例示的実施形態は、任意の所望の方法で互いに組み合わされてもよい。
【符号の説明】
【0065】
10 ブレーキペダル
20 ブレーキディスク
40 制動デバイス
41 油圧制動ユニット
42 回生制動ユニット
43 特性マップメモリ
44 制御ユニット
B1〜B3 油圧制動力特性曲線
E1〜E6 平坦領域
G1〜G4 発電機ベース制動力特性曲線
P1〜P6 特性曲線点
【技術分野】
【0001】
本発明は制動デバイスを備えた自動車用制動システムを制御する方法及び装置に関する。
【背景技術】
【0002】
(特許文献1)は、自動車、特にハイブリッド車両を操作するための方法に関する。この方法では自動車の制動操作中の全制動トルクは、自動車の少なくとも1つの電気機械によって少なくとも部分的に提供される。ここで、全制動トルクのうち電気機械によって少なくとも部分的に提供されていたトルクが提供されなくなる時間が決定される。
【0003】
(特許文献2)は、自動車の制動システムを制御する方法、具体的には複数の摩擦ブレーキと自動車用発電機とを備える回生制動システムを制御する方法及びこの方法を制御するソフトウェアモジュールを記載する。本文献に記載された制動システムを制御するための方法において、電気的に制御可能な発電機及び複数の油圧摩擦ブレーキがパラレル構成で使用される。ここで、発電機の設定値制動トルクは、全設定値減速度を決定することによって決定される。発電機は前記設定値制動トルクに基づいて制御される。
【0004】
(特許文献3)は、発電機と多数の油圧摩擦ブレーキとを備える制動システムを制御する方法を記載する。記載された制御方法は回生制動動作と油圧摩擦ブレーキによる制動動作を含む。ここで、車両操作点の監視もまた行われ、支配的な制動トルクの決定が行われ、回生制動動作の決定及び摩擦ブレーキの作動が行われる。
【0005】
(特許文献4)は、少なくとも電気モータによって駆動される車両のアンチロック制動システムを起動するための方法及びシステムに関する。本文献に記載の方法は、運転上の安全性を改善するために、及びタイヤのトレッドに対する摩耗を低減するために提供されている。この方法は、車両の実際の速度と車両のドライブトレインの駆動要素の速度とを比較することによって、車両の少なくとも1つのホイールがロックし始めたことを自動的に識別することを含む。車両のホイールの少なくとも1つがロックし始めたことが検出されたことに基づいて、車両のホイールがさらにロックすることを防止するために、当該システムによる回生制動が周期的に調節される。
【0006】
(特許文献5)は、運動エネルギーの回収が可能な電気車両の制動システムを記載する。本文献に記載の制動システムにおいて、電気車両の運転者に、油圧ブレーキシステムが使用されている印象を与えるために、フィードバック力発生器が提供される。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】独国特許出願公開第10 2009 039 347 A1号明細書
【特許文献2】米国特許出願公開第2006/0220452 A1号明細書
【特許文献3】米国特許出願公開第2009/0118887 A1号明細書
【特許文献4】国際公開第2010/049945 A1号パンフレット
【特許文献5】米国特許出願公開第2004/0251095 A1号明細書
【発明の概要】
【発明が解決しようとする課題】
【0008】
以上の背景の下、本発明は自動車用制動システムを制御する方法及び装置を提供するという目的に基づく。本方法により、自動車の制動システムを、制動システムの特性に最も適合した方法で操作することが可能になる。
【課題を解決するための手段】
【0009】
前記目的は、本発明の、特許請求項1の特徴を有する制動デバイスを備えた自動車用制動システムを制御する方法によって、及び特許請求項8の特徴を有する自動車用制動システムを制御する対応する装置によって達成される。
【0010】
すなわち、前記方法は、自動車用制動システムを制御する方法であって、この制動システムが制動デバイスを備え、この制動デバイスが油圧制動ユニットと回生制動ユニットとを備え、かつブレーキペダルの作動度と制動システムの少なくとも1つの特性とを検出するように設計されている方法が提案される。本方法は、制動システムの少なくとも1つの検出された特性に基づき、油圧制動ユニットの油圧制動力特性曲線を計算するステップと、所定の基準に基づきかつ計算された油圧制動力特性曲線に応じて特性マップから回生制動ユニットの発電機ベース制動力特性曲線を選択するステップと、計算された油圧制動力特性曲線と選択された発電機ベース制動力特性曲線とに基づき、ブレーキペダルの検出された作動度に従い油圧制動ユニットと回生制動ユニットを制御するステップとを含む。
【0011】
同様に、前記装置は、自動車用制動システムを制御する装置であって、油圧制動ユニットと回生制動ユニットとを備える制動デバイスを備え、この制動デバイスがブレーキペダルの作動度と制動システムの少なくとも1つの特性とを検出するように設計された装置が、本発明により提案される。ここで、この制動デバイスは、制動システムの少なくとも1つの検出された特性に基づき油圧制動ユニットの油圧制動力特性曲線を計算し、そして、所定の基準に基づきかつ計算された油圧制動力特性曲線に応じて特性マップから回生制動ユニットの発電機ベース制動力特性曲線を選択するように設計される。油圧制動ユニットと回生制動ユニットは、計算された油圧制動力特性曲線と選択された発電機ベース制動力特性曲線に基づき、検出されたブレーキペダルの作動度に従い制御可能である。
【0012】
本発明の目的は、発電機ベースの減速中に回生によって得られる電気エネルギーの最大限の利用を実現すること、及び自動車の油圧供給ブレーキの各部品公差又は他の変動要因を考慮して、最大の回生エネルギーを得るように制動システムを最適化することにある。
【0013】
本発明は、発電機ベースの減速によって得られる電気エネルギーが最大化されるという点で従来技術より優れている。
【0014】
また、本発明によると、ブレーキの無効な移動がより少ない便利なシステムが実現できるという利点も結果として得られる。すなわち、このシステムによって、ブレーキペダル特性曲線は、発電機ベースの減速部分が、運転者が追加的にわずかにペダルを踏み込むだけで油圧制動に切り替わるように適合される。
【0015】
従属項は特許請求項1に特定される方法の、及び特許請求項8に特定される装置の有利な実施形態及び改善形態に関する。
【0016】
本発明の方法の好ましい実施形態において、制動システムの少なくとも1つの検出される特性として、油圧制動ユニットの制動力が発生し始めるブレーキペダルの作動度が用いられる。
【0017】
本方法のさらに好ましい実施形態において、回生制動ユニットの発電機ベース制動力特性曲線の選択に関して、発電機ベース制動力特性曲線の、ブレーキペダル特性曲線図に出現する平坦領域が最小化されるという基準が用いられる。
【0018】
本方法のさらに好ましい実施形態において、回生制動ユニットの発電機ベース制動力特性曲線の選択に関して、回生制動ユニットのエネルギー回収のエネルギー効率が最大化されるという基準が用いられる。
【0019】
本方法のさらに好ましい実施形態において、制動システムの少なくとも1つの検出される特性は、自動車が始動されると検出される。
【0020】
本方法のさらに好ましい実施形態において、制動システムの少なくとも1つの検出される特性は、自動車のブレーキペダルを踏み込むと検出される。
【0021】
本方法のさらに好ましい実施形態において、制動システムの少なくとも1つの検出される特性は、自動車の運転中の任意の時間間隔において、それぞれ新たに検出される。これにより、有利には、油圧制動ユニットの制動挙動の変化を検出すること、及びそれに応じて回生制動ユニットの制動力を適合することが可能になる。
【0022】
装置の好ましい実施形態において、制動デバイスは、検出される制動システムの特性として、油圧制動ユニットの制動力が発生し始めるブレーキペダルの作動度を用いるように設計される。
【0023】
以上によって発電機ベースの制動と機械的な制動とのエネルギー効率の良い組み合わせが可能になる。
【0024】
本発明の装置のさらに好ましい実施形態において、制動デバイスは、回生制動ユニットの発電機ベース制動力特性曲線の選択によって、発電機ベース制動力特性曲線の、ブレーキペダル特性曲線図に出現する平坦領域を最小化するように設計される。
【0025】
本装置のさらに好ましい実施形態において、制動デバイスは、回生制動ユニットの発電機ベース制動力特性曲線の選択によって、回生制動ユニットのエネルギー回収のエネルギー効率を最大化するように設計される。
【0026】
本装置のさらに好ましい実施形態において、制動デバイスは、自動車を始動すると検出される、制動システムの少なくとも1つの特性を検出するように設計される。特に、本方法において、運転者に一切感知されることなく、油圧制動ユニットの油圧制動力特性曲線を検出することが可能になる。
【0027】
本装置のさらに好ましい実施形態において、制動デバイスは、自動車のブレーキペダルを踏み込むと検出される、制動システムの少なくとも1つの特性を検出するように設計される。油圧制動ユニットの特性の検出によって、摩耗に誘発される油圧制動力特性曲線の変化が制動システムのエネルギー効率の低下を招くという状況を回避できる。
【0028】
本発明の実施形態のさらなる特徴及び利点が、添付図面を参照する以下の説明から明らかになる。
【図面の簡単な説明】
【0029】
【図1】自動車用制動システムを制御するための本発明による方法の実施形態を表すフローチャートを示す。
【図2】自動車用制動システムを制御するための本発明による装置の実施形態の概略図を示す。
【図3】本発明のさらなる実施形態による、自動車用制動システムのブレーキペダル特性曲線を描いたブレーキペダル特性曲線図を示す。
【図4】本発明のさらなる実施形態による、自動車用制動システムのブレーキペダル特性曲線を描いたブレーキペダル特性曲線図を示す。
【図5】本発明のさらなる実施形態による、自動車用制動システムのブレーキペダル特性曲線を描いたブレーキペダル特性曲線図を示す。
【発明を実施するための形態】
【0030】
図面において、同一及び機能的に同一の要素、特徴並びに部品は、別段の記載がない限り、それぞれ同じ参照符号で示される。明瞭さかつ分かりやすさのため、図面中の部品及び要素は互いに対して一定の縮尺で描かれる必要はないということも自明である。
【0031】
図1は自動車用制動システムを制御するための本発明による方法の実施形態を表すフローチャートを示す。
【0032】
本明細書に記載される方法は、制動システムの信頼性の高い制御に適している。
【0033】
ステップS1において、油圧制動ユニット41の油圧制動力特性曲線B2が、検出された制動システム特性に基づいて計算される。そのため、ステップS1において、油圧制動ユニット41のブレーキライニングがブレーキディスク20に接触する時のブレーキペダルの移動量を算出できるようになっている。その時からさらにペダルを作動させると、制動圧力の連続的な増加がもたらされ、油圧制動ユニット41が有効になる。発電機ベースの制動に機械式制動が重畳すると、利用可能な回生エネルギーが失われる。
【0034】
ステップS2において、回生制動ユニット42の発電機ベース制動力特性曲線が、所定の基準に基づき、計算された油圧制動力特性曲線B2に応じて特性曲線マップから選択される。回生トルクが大きくなるほど、制動システムのエネルギー回収はより効率的になる。
【0035】
ステップS3において、油圧制動ユニット41と回生制動ユニット42とが、計算された油圧制動力特性曲線B2と選択された発電機ベース制動力特性曲線G4とに基づき、ブレーキペダル10の検出された作動度に従い制動システムによって制御される。
【0036】
その後、ステップS1とS2は、運転操作中、何度でも繰り返すことができる。
【0037】
図2は自動車用制動システムを制御するための本発明による装置の実施形態の概略図を示す。制動システムは制動デバイス40を含む。制動デバイス40はブレーキディスク20を備えた油圧制動ユニット41と、制御ユニット44と、回生制動ユニット42とを備え、かつ、ブレーキペダル10の作動度及び制動システムの少なくとも1つの特性を検出するように設計される。
【0038】
制動デバイス40は、例えば、制動システムの検出された特性に基づき、油圧制動ユニット41の油圧制動力特性曲線B2を計算するように設計される。制動デバイス40はまた、制動デバイス40の特性マップメモリ43に記憶された特性マップから、パラメータtによって決定される回生制動ユニット42の発電機ベース制動力特性曲線G1〜G4を選択するために、使用されることもある。
【0039】
例えば、油圧制動ユニット41及び回生制動ユニット42は、油圧制動力特性曲線B1、B2、B3及び発電機ベース制動力特性曲線G1〜G4に基づき、ブレーキペダル10の検出された作動度に従い制動デバイス40によって制御可能である。
【0040】
回生制動ユニット42は、例えば、起電力ブレーキとして設計されるか、さもなければ発電機ブレーキとして設計されるか、又は制動の間発電機として使用される電気駆動モータとして設計される。
【0041】
制御ユニット44は、制動システムを制御又は統制するための、プログラマブルコントローラとして、又は何らかの他の方法でデジタル式にプログラム可能な制御器として設計されてもよい。
【0042】
油圧制動ユニット41は、例えばディスクブレーキとして又は他のブレーキとして設計される。油圧制動ユニットでは、ホイールハブに固定されたブレーキディスク20によって及びブレーキキャリパーに設置されたブレーキライニングを備えたブレーキパッドによって、自動車の減速が生じる。
【0043】
図3は本発明のさらなる実施形態による、自動車用制動システムのブレーキペダル特性曲線のブレーキペダル特性曲線図を示す。
【0044】
ブレーキペダル移動量すなわちブレーキペダル10の踏み込み度が横軸に示され、英文字sで表されている。aによって表される縦軸は自動車の減速度の大きさを示す。
【0045】
発電機ベースの制動及び機械的な制動は制動システムによって制御される。回生制動ユニット42の発電機ベースの制動では、ブレーキペダル10の各位置に対応する減速度は再現性があるが、そのような一定の関係は油圧制動ユニット41による機械的な制動の場合にあっては存在しない。
【0046】
例えば、停止プロセスの間も、発電機ベースの制動動作の減少が生じ得る。これは機械的な制動によって補償されなければならない。これは例えば運転者が後に続けて行うブレーキペダルの踏み込みによって行われるか、又は制動システムの油圧アセンブリの対応する制御を介して制動システムによって実現されてもよい。これにより、例えば、回生制動ユニット42の発電機ベースの制動力が減少するにつれて、油圧制動ユニット41の機械的な制動の減速度が増大することが可能になる。
【0047】
図3はさらに点線によって、量産車の、部品公差の結果である、油圧制動ユニット41の制動力特性曲線を示す異なる油圧制動力特性曲線B1、B2、B3を表す。これは、部品公差の極値としての制動力特性曲線B1及びB3によって、また部品公差の平均値としての制動力特性曲線B2によって表されるように、油圧制動ユニット41の挙動の違いをもたらす。
【0048】
同様にブレーキペダル特性曲線図に表されるのは、発電機ベース制動力特性曲線G1である。この曲線は、電気機械が発電機として運転することによって生成され、特性曲線点P1で曲がり、そこから、各油圧制動力特性曲線B1、B2、B3に応じて異なる水平な平坦領域E1、E2、E3が伸びる。ここで、油圧制動力特性曲線B1、B2、B3の発電機ベース制動力特性曲線G1との交差点は特性曲線点P5、P6及びP7として表示される。
【0049】
しかしながら、前記水平な平坦領域E1、E2、E3が伸びるほど、この領域が運転者によって感知されるリスクが高まる。
【0050】
従って、本発明の方法によって使用される基準として、制動動作の発電機ベース制動挙動要素、すなわち、制動力特性曲線G1の直線上昇領域の傾きt、及び点P1の位置が可変とされるようになっている。
【0051】
このため、第一に、油圧制動力特性曲線B2上の特性曲線点が決定される。この特性曲線点において、油圧制動ユニット41のブレーキライニングが接触を始める。すなわち自動車の油圧制動ユニット41が対応する制動力を提供する。
【0052】
前記特性曲線点を越えると、実質的に油圧制動ユニット41によってのみ制動が行われる。
【0053】
前記決定は、例えば自動車を始動すると実行される。なぜならハイブリッド車両は通常自動変速機を装備し、従って自動車の始動時、ブレーキペダル10の踏み込みが最初に要求されるからである。
【0054】
次に、回生制動ユニット42の電気機械の発電機ベース作動、具体的には直線G1の傾きt及び特性曲線点P1の位置が、以下のように設定される。すなわち、第一に、回生制動ユニット42の最大制動力を構成する特性曲線点P1が、決定された特性曲線点P5、P6又はP7より確実に先に来るように設定される。なぜなら、前記特性曲線点P5、P6又はP7において、自動車の油圧制動ユニット41は作動を始めるからである。
【0055】
図4は、本発明のさらなる実施形態による自動車用制動システムのブレーキペダル特性曲線のブレーキペダル特性曲線図を示す。
【0056】
図3と同様、ブレーキペダル移動量sは横軸に表示され、aで示される縦軸は自動車の減速度の大きさを示す。
【0057】
ブレーキペダル特性曲線図は、平坦領域E4〜E6を有する異なる発電機ベース制動力特性曲線G1〜G3を表す。特性曲線G1〜G3は、発電機ベース制動力特性曲線G1〜G3の直線上昇領域の傾きtが異なり、従って平坦領域E4〜E6の長さが変化する。発電機ベース制動力特性曲線G1〜G3の直線領域と平坦領域E4〜E6との間の移行は、特性曲線点P1〜P3で表される。
【0058】
例えば、制動システムに用いられる基準は、平坦領域E4〜E6の長さを最小化することにあってもよい。しかしながら万一、油圧制動ユニット41の発電機ベース制動力の開始の、公差によって引き起こされる誤計算があった場合には、未利用部分が残る可能性があり、従って制動システムのエネルギー効率は落ちる可能性がある。
【0059】
図5は、本発明のさらなる実施形態による自動車用制動システムのブレーキペダル特性曲線を有するブレーキペダル特性曲線図を示す。
【0060】
図3及び4と同様、ブレーキペダル移動量は横軸に表示され、aで示される縦軸は自動車の減速度の大きさを示す。
【0061】
図3及び4で示される例とは対照的に、示される発電機ベース制動力特性曲線G4は、異なる傾きで直線状に上昇しかつ特性曲線点P4で分割される2つの領域を有する。例えば、制動力特性曲線G4の比較的緩やかな傾きの第1領域と比較的急な傾きの第2領域とへのかかる分割の結果、運転者が感知する発電機ベース制動力特性曲線の無効な移動を延ばす必要がもはやなくなる。
【0062】
特性曲線点P5において、発電機ベース制動力特性曲線G4は油圧制動力特性曲線B2と交差する。変化する運転状況も考慮に入れることができるように、自動車の走行中に、前記点P5の決定を再実行してもよい。これによって、さらに、例えば発電機ベース制動力特性曲線G1〜G4の傾きt及び点P5の位置を再設定することが可能となる。制動システムで基準として用いられるような、平坦領域の最小化は、例えば、図5の発電機ベース制動力特性曲線G4で示されているように、平坦領域E4〜E6の長さをゼロに短縮することを含む。従って、かかる制動力特性曲線G4には無効な移動がなく、運転者は、ペダル特性曲線の全範囲にわたり、ブレーキペダル10の作動度の増大とともに連続的に増大する制動トルクを感じる。
【0063】
図5は、本発明のさらなる実施形態による自動車用制動システムのブレーキペダル特性曲線に関するブレーキペダル特性曲線図を示す。
【0064】
本発明を好ましい例示的実施形態に基づき記載してきたが、本発明はそれらに制限されることはなく、様々な方法で変更可能である。特に上述の改良形態及び例示的実施形態は、任意の所望の方法で互いに組み合わされてもよい。
【符号の説明】
【0065】
10 ブレーキペダル
20 ブレーキディスク
40 制動デバイス
41 油圧制動ユニット
42 回生制動ユニット
43 特性マップメモリ
44 制御ユニット
B1〜B3 油圧制動力特性曲線
E1〜E6 平坦領域
G1〜G4 発電機ベース制動力特性曲線
P1〜P6 特性曲線点
【特許請求の範囲】
【請求項1】
自動車用制動システムを制御する方法であり、前記制動システムが制動デバイス(40)を備え、前記制動デバイス(40)が油圧制動ユニット(41)と回生制動ユニット(42)とを備え、かつブレーキペダル(10)の作動度と前記制動システムの少なくとも1つの特性とを検出するように設計されている方法であって、
前記制動システムの前記少なくとも1つの検出された特性に基づき、前記油圧制動ユニット(41)の油圧制動力特性曲線(B2)を計算するステップ(S1)と、
所定の基準に基づきかつ前記計算された油圧制動力特性曲線(B2)に応じて特性マップから前記回生制動ユニット(42)の発電機ベース制動力特性曲線(G1〜G4)を選択するステップ(S2)と、
前記計算された油圧制動力特性曲線(B2)と前記選択された発電機ベース制動力特性曲線(G1〜G4)に基づき、前記ブレーキペダル(10)の検出された作動度に従い前記油圧制動ユニット(41)と前記回生制動ユニット(42)とを制御するステップ(S3)と
を含む方法。
【請求項2】
前記制動システムの前記少なくとも1つの検出される特性として、前記油圧制動ユニット(41)の制動力が発生し始める前記ブレーキペダル(10)の作動度が用いられることを特徴とする請求項1に記載の方法。
【請求項3】
前記回生制動ユニット(42)の前記発電機ベース制動力特性曲線(G1〜G4)の選択に関して、前記発電機ベース制動力特性曲線(G1〜G4)のブレーキペダル特性曲線図に出現する平坦領域(E4、E5、E6)が最小化されるという基準が用いられることを特徴とする請求項1又は2に記載の方法。
【請求項4】
前記回生制動ユニット(42)の前記発電機ベース制動力特性曲線(G1〜G4)の選択に関して、前記回生制動ユニット(42)のエネルギー回収のエネルギー効率が最大化されるという基準が用いられることを特徴とする請求項1〜3のいずれか一項に記載の方法。
【請求項5】
前記制動システムの前記少なくとも1つの検出される特性が、前記自動車を始動すると検出されることを特徴とする請求項1〜4のいずれか一項に記載の方法。
【請求項6】
前記制動システムの前記少なくとも1つの検出される特性が、前記自動車の前記ブレーキペダル(10)を踏み込むと検出されることを特徴とする請求項1〜5のいずれか一項に記載の方法。
【請求項7】
前記制動システムの前記少なくとも1つの検出される特性が、前記自動車の運転中の任意の時間間隔においてそれぞれ新たに検出されることを特徴とする請求項1〜6のいずれか一項に記載の方法。
【請求項8】
自動車用制動システムを制御する装置であり、油圧制動ユニット(41)と回生制動ユニット(42)とを備える制動デバイス(40)を備え、前記制動デバイス(40)がブレーキペダル(10)の作動度と前記制動システムの少なくとも1つの特性とを検出するように設計された装置であって、
− 前記制動デバイス(40)が、前記制動システムの前記少なくとも1つの検出された特性に基づき前記油圧制動ユニット(41)の油圧制動力特性曲線(B2)を計算し、そして、所定の基準に基づきかつ前記計算された油圧制動力特性曲線(B2)に応じて特性マップから前記回生制動ユニット(42)の発電機ベース制動力特性曲線(G1〜G4)を選択するように設計され、
− 前記油圧制動ユニット(41)と前記回生制動ユニット(42)が、前記計算された油圧制動力特性曲線(B2)と前記選択された発電機ベース制動力特性曲線(G1〜G4)に基づき、前記ブレーキペダル(10)の検出された作動度に従い制御可能である、装置。
【請求項9】
前記制動デバイス(40)が、検出される前記制動システムの前記特性として、前記油圧制動ユニット(41)の制動力が発生し始める前記ブレーキペダル(10)の作動度を用いるように設計されることを特徴とする請求項8に記載の装置。
【請求項10】
前記制動デバイス(40)が、前記回生制動ユニット(42)の前記発電機ベース制動力特性曲線(G1、G2、G3)の選択によって、前記発電機ベース制動力特性曲線(G1、G2、G3)のブレーキペダル特性曲線図に出現する平坦領域(E4、E5、E6)を最小化するように設計されることを特徴とする請求項8又は9に記載の装置。
【請求項11】
前記制動デバイス(40)が、前記回生制動ユニット(42)の前記発電機ベース制動力特性曲線(G1、G2、G3)の選択によって、前記回生制動ユニット(42)のエネルギー回収のエネルギー効率を最大化するように設計されることを特徴とする請求項8〜10のいずれか一項に記載の装置。
【請求項12】
前記制動デバイス(40)が、前記自動車を始動すると検出される前記制動システムの前記少なくとも1つの特性を検出するように設計されることを特徴とする請求項8〜11のいずれか一項に記載の装置。
【請求項13】
前記制動デバイス(40)が、前記自動車の前記ブレーキペダル(10)を踏み込むと検出される前記制動システムの前記少なくとも1つの特性を検出するように設計されることを特徴とする請求項8〜12のいずれか一項に記載の装置。
【請求項14】
請求項1〜7のいずれか一項に記載の方法を実行するように設計されたコンピュータープログラム。
【請求項1】
自動車用制動システムを制御する方法であり、前記制動システムが制動デバイス(40)を備え、前記制動デバイス(40)が油圧制動ユニット(41)と回生制動ユニット(42)とを備え、かつブレーキペダル(10)の作動度と前記制動システムの少なくとも1つの特性とを検出するように設計されている方法であって、
前記制動システムの前記少なくとも1つの検出された特性に基づき、前記油圧制動ユニット(41)の油圧制動力特性曲線(B2)を計算するステップ(S1)と、
所定の基準に基づきかつ前記計算された油圧制動力特性曲線(B2)に応じて特性マップから前記回生制動ユニット(42)の発電機ベース制動力特性曲線(G1〜G4)を選択するステップ(S2)と、
前記計算された油圧制動力特性曲線(B2)と前記選択された発電機ベース制動力特性曲線(G1〜G4)に基づき、前記ブレーキペダル(10)の検出された作動度に従い前記油圧制動ユニット(41)と前記回生制動ユニット(42)とを制御するステップ(S3)と
を含む方法。
【請求項2】
前記制動システムの前記少なくとも1つの検出される特性として、前記油圧制動ユニット(41)の制動力が発生し始める前記ブレーキペダル(10)の作動度が用いられることを特徴とする請求項1に記載の方法。
【請求項3】
前記回生制動ユニット(42)の前記発電機ベース制動力特性曲線(G1〜G4)の選択に関して、前記発電機ベース制動力特性曲線(G1〜G4)のブレーキペダル特性曲線図に出現する平坦領域(E4、E5、E6)が最小化されるという基準が用いられることを特徴とする請求項1又は2に記載の方法。
【請求項4】
前記回生制動ユニット(42)の前記発電機ベース制動力特性曲線(G1〜G4)の選択に関して、前記回生制動ユニット(42)のエネルギー回収のエネルギー効率が最大化されるという基準が用いられることを特徴とする請求項1〜3のいずれか一項に記載の方法。
【請求項5】
前記制動システムの前記少なくとも1つの検出される特性が、前記自動車を始動すると検出されることを特徴とする請求項1〜4のいずれか一項に記載の方法。
【請求項6】
前記制動システムの前記少なくとも1つの検出される特性が、前記自動車の前記ブレーキペダル(10)を踏み込むと検出されることを特徴とする請求項1〜5のいずれか一項に記載の方法。
【請求項7】
前記制動システムの前記少なくとも1つの検出される特性が、前記自動車の運転中の任意の時間間隔においてそれぞれ新たに検出されることを特徴とする請求項1〜6のいずれか一項に記載の方法。
【請求項8】
自動車用制動システムを制御する装置であり、油圧制動ユニット(41)と回生制動ユニット(42)とを備える制動デバイス(40)を備え、前記制動デバイス(40)がブレーキペダル(10)の作動度と前記制動システムの少なくとも1つの特性とを検出するように設計された装置であって、
− 前記制動デバイス(40)が、前記制動システムの前記少なくとも1つの検出された特性に基づき前記油圧制動ユニット(41)の油圧制動力特性曲線(B2)を計算し、そして、所定の基準に基づきかつ前記計算された油圧制動力特性曲線(B2)に応じて特性マップから前記回生制動ユニット(42)の発電機ベース制動力特性曲線(G1〜G4)を選択するように設計され、
− 前記油圧制動ユニット(41)と前記回生制動ユニット(42)が、前記計算された油圧制動力特性曲線(B2)と前記選択された発電機ベース制動力特性曲線(G1〜G4)に基づき、前記ブレーキペダル(10)の検出された作動度に従い制御可能である、装置。
【請求項9】
前記制動デバイス(40)が、検出される前記制動システムの前記特性として、前記油圧制動ユニット(41)の制動力が発生し始める前記ブレーキペダル(10)の作動度を用いるように設計されることを特徴とする請求項8に記載の装置。
【請求項10】
前記制動デバイス(40)が、前記回生制動ユニット(42)の前記発電機ベース制動力特性曲線(G1、G2、G3)の選択によって、前記発電機ベース制動力特性曲線(G1、G2、G3)のブレーキペダル特性曲線図に出現する平坦領域(E4、E5、E6)を最小化するように設計されることを特徴とする請求項8又は9に記載の装置。
【請求項11】
前記制動デバイス(40)が、前記回生制動ユニット(42)の前記発電機ベース制動力特性曲線(G1、G2、G3)の選択によって、前記回生制動ユニット(42)のエネルギー回収のエネルギー効率を最大化するように設計されることを特徴とする請求項8〜10のいずれか一項に記載の装置。
【請求項12】
前記制動デバイス(40)が、前記自動車を始動すると検出される前記制動システムの前記少なくとも1つの特性を検出するように設計されることを特徴とする請求項8〜11のいずれか一項に記載の装置。
【請求項13】
前記制動デバイス(40)が、前記自動車の前記ブレーキペダル(10)を踏み込むと検出される前記制動システムの前記少なくとも1つの特性を検出するように設計されることを特徴とする請求項8〜12のいずれか一項に記載の装置。
【請求項14】
請求項1〜7のいずれか一項に記載の方法を実行するように設計されたコンピュータープログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−85456(P2013−85456A)
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願番号】特願2012−220346(P2012−220346)
【出願日】平成24年10月2日(2012.10.2)
【出願人】(510238096)ドクター エンジニール ハー ツェー エフ ポルシェ アクチエンゲゼルシャフト (63)
【氏名又は名称原語表記】Dr. Ing. h.c. F. Porsche Aktiengesellschaft
【住所又は居所原語表記】Porscheplatz 1, D−70435 Stuttgart, Germany
【Fターム(参考)】
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願日】平成24年10月2日(2012.10.2)
【出願人】(510238096)ドクター エンジニール ハー ツェー エフ ポルシェ アクチエンゲゼルシャフト (63)
【氏名又は名称原語表記】Dr. Ing. h.c. F. Porsche Aktiengesellschaft
【住所又は居所原語表記】Porscheplatz 1, D−70435 Stuttgart, Germany
【Fターム(参考)】
[ Back to top ]