
制動制御装置

【課題】ホイールシリンダ液圧の制御精度を向上し得る制動制御装置を提供する。
【解決手段】ドライバによって操作されるブレーキ操作部材と、ホイールシリンダ液圧を供給する液圧回路と、モータの回転により駆動しホイールシリンダ液圧がブレーキ操作部材の操作に応じた値となるよう液圧回路に液圧を発生させるポンプと、ポンプから吐出されるブレーキ液の一部をポンプに循環させるべく液圧回路の一部を共有する状態に設けた循環流路とを備え、液圧回路のホイールシリンダ側に接続する上流側と下流側との差圧Pdを調節可能な調圧弁と、調圧弁を流通するブレーキ液の循環流量に基づき、目標となる差圧Pdが得られる電流値Iを演算して調圧弁への印加電流Iを制御する制御手段を備えた。
【解決手段】ドライバによって操作されるブレーキ操作部材と、ホイールシリンダ液圧を供給する液圧回路と、モータの回転により駆動しホイールシリンダ液圧がブレーキ操作部材の操作に応じた値となるよう液圧回路に液圧を発生させるポンプと、ポンプから吐出されるブレーキ液の一部をポンプに循環させるべく液圧回路の一部を共有する状態に設けた循環流路とを備え、液圧回路のホイールシリンダ側に接続する上流側と下流側との差圧Pdを調節可能な調圧弁と、調圧弁を流通するブレーキ液の循環流量に基づき、目標となる差圧Pdが得られる電流値Iを演算して調圧弁への印加電流Iを制御する制御手段を備えた。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ブレーキ操作力に基づいてマスタシリンダ液圧を発生させるマスタシリンダと、前記マスタシリンダ液圧に基づいて各車輪にホイールシリンダ液圧を発生させる液圧回路と、前記マスタシリンダ液圧に加圧するアシスト液圧を発生させるモータの回転により駆動するポンプとを備えた制動制御装置に関する。
【背景技術】
【0002】
この種の制動制御装置は、モータの回転駆動によって、ポンプから吐出される液の一部をポンプに循環させる循環流路が設けられ、ポンプから吐出された液の一部をホイールシリンダに供給することなくポンプに循環させている。この循環流路には、調圧弁が設けられ、調圧弁の上流側と下流側との差圧が調節される。具体的には、前記差圧と印加する電流との相関関係が備えられ、この相関関係に基づいて求める差圧に応じた電流が調圧弁に印加される。このように、差圧を調節することにより、ホイールシリンダ液圧が制御される(例えば、特許文献1)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2001−71755号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
このような制動制御装置においては、モータを一定速度で回転させてポンプを駆動させるため、ポンプに循環する液量は変化しない。しかし、ポンプを駆動させる際に、モータの回転速度を変化させた場合、ポンプに循環する液量が変化するため、ホイールシリンダ液圧の制御精度が悪化する。
【0005】
本発明は、上述の問題点に鑑みてなされたものであり、ホイールシリンダ液圧の制御精度を向上し得る制動制御装置を提供することにある。
【課題を解決するための手段】
【0006】
本発明の第1特徴構成は、ドライバによって操作されるブレーキ操作部材と、各車輪に配設されたホイールシリンダに対してホイールシリンダ液圧を供給する液圧回路と、モータの回転により駆動し前記ホイールシリンダ液圧が前記ブレーキ操作部材の操作に応じた値となるよう前記液圧回路に液圧を発生させるポンプと、前記ポンプから吐出されるブレーキ液の一部を前記ポンプに循環させるべく前記液圧回路の一部を共有する状態に設けた循環流路とを備えると共に、当該循環流路に設けられ、前記液圧回路の前記ホイールシリンダ側に接続する上流側と下流側との差圧を調節可能な調圧弁と、前記調圧弁を流通するブレーキ液の循環流量に基づき、目標となる前記差圧が得られる電流値を演算して前記調圧弁への印加電流を制御する制御手段を備えた点にある。
【0007】
ポンプから吐出された液が調圧弁を通過する際には、調圧弁の上流側と下流側とで液の差圧が生じる。この差圧は、単に調圧弁の開度によって決定されるものではなく、流通する液の流量や粘性、あるいは、調圧弁固有の流路形状等によって影響を受ける。液が流体であるが故に生じるこのような特性は定性的に把握することは困難である。
そこで、本構成では、液の吐出量を変化させた場合に、調圧弁を通過する液の循環流量が変化することに注目し、調圧弁を流通する液の循環流量を把握して、この循環流量に基づいて目標となる差圧を得るための電流値を演算し、調圧弁への印加電流を制御する制御手段を備えた。
この結果、例えば、ポンプからの液の吐出量を変化させた場合でも、調圧弁を流通する液の循環流量は、そのときの液の特性や調圧弁の個別特性を最も反映したパラメーターとなるため、ホイールシリンダ液圧の制御精度を向上することができる。
【0008】
本発明の第2特徴構成は、前記ポンプから吐出されるブレーキ液のみで前記ホイールシリンダ液圧を発生可能に構成され、前記ブレーキ操作部材の操作量を検出するブレーキ操作量検出手段を備え、前記ホイールシリンダ液圧が前記ブレーキ操作量検出手段の検出結果に応じた値となるよう前記ポンプが駆動される点にある。
【0009】
本構成において、ポンプから吐出されるブレーキ液のみでホイールシリンダ液圧を発生させる場合、調圧弁の上流側と下流側との差圧がホイールシリンダ液圧となる。従って、上述のように差圧を適切に制御することにより、ホイールシリンダ液圧の制御精度を向上することができる。
【0010】
本発明の第3特徴構成は、ブレーキ操作部材の操作に基づいて前記液圧回路にマスタシリンダ液圧を発生させるマスタシリンダと、前記マスタシリンダ液圧を検出するマスタシリンダ液圧検出手段とを備え、前記ホイールシリンダ液圧が前記マスタシリンダ液圧検出手段の検出結果に応じた値となるように、前記ポンプが前記マスタシリンダ液圧に対して加圧するアシスト液圧を発生させる点にある。
【0011】
本構成では、調圧弁の上流側と下流側との差圧がアシスト液圧となり、マスタシリンダ液圧とアシスト液圧との和がホイールシリンダ液圧となる。従って、上述のように差圧を適切に制御することにより、ホイールシリンダ液圧の制御精度を向上することができる。
【0012】
本発明の第4特徴構成は、前記制御手段は、前記循環流量に基づき、前記循環流量毎に異なる前記印加電流と前記差圧との相関関係の中から一つの相関関係を決定し、当該決定した相関関係に基づいて前記調圧弁への印加電流を制御する点にある。
【0013】
本構成では、循環流量毎に、調圧弁が有する印加電流―圧力特性を把握することとし、そのときの循環流量に応じた最適の相関関係を利用して調圧弁の開度を調節することとした。つまり、ある瞬間の循環流量を把握して、その次に設定したい調圧弁の差圧に応じた電流を調圧弁に印加する。この結果、調圧弁の開度が変更され、循環流量が変化して差圧が再設定される。状態が安定すれば、さらにそのときの循環流量を把握し、さらに次の差圧調整に備えて当該循環流量に応じた調圧弁の印加電流−圧力特性を把握しておく。
このような制御を繰り返し行うことで、調圧弁を最適に制御することができ、良好な制動感覚を発揮する制動制御装置を得ることができる。
【0014】
本発明の第5特徴構成は、前記モータの回転速度を検出する回転速度検出手段を備え、前記制御手段は、ブレーキ操作が行われた後、前記ホイールシリンダ液圧が安定した状態で、前記検出された回転速度に基づいて前記循環流量を演算する点にある。
【0015】
ブレーキ操作がされ、ホイールシリンダ液圧が安定した状態では、ポンプから吐出される液は調圧弁を通過して再びポンプに還流し、この循環状態が持続される。よって、この状態では、ポンプからの吐出流量と、調圧弁を通過する液の循環流量とが等しくなる。従って、この状態でモータの回転速度を検出することにより、循環流量が把握できるため、調圧弁の印加電流−圧力特性を正確に把握することができる。この結果、最適な制動効果を得ることができる。
【0016】
本発明の第6特徴構成は、前記モータの回転速度を検出する回転速度検出手段を備えると共に、前記ホイールシリンダ液圧を検出するホイールシリンダ液圧検出手段を備え、前記制御手段は、前記検出された回転速度と前記ホイールシリンダ液圧の変化量とに基づいて前記循環流量を演算する点にある。
【0017】
本構成のように、モータの回転速度とホイールシリンダ液圧の変化量とに基づいて循環流量を算出することにより、ホイールシリンダ液圧とが安定するのを待つまでもなく調圧弁での循環流量を算出することができる。このため、調圧弁の印加電流−圧力特性を迅速に把握することができ、制動制御がより正確なものとなる。
【0018】
本発明の第7特徴構成は、前記ブレーキ液の温度に基づいて、前記制御手段は、前記循環流量を補正する点にある。
【0019】
循環流量は、液の温度の変化に伴う体積や粘度の変化によって変化する。したがって、本構成のように、ブレーキ液の温度に基づいて循環流量を補正することにより、循環流量の算出精度が向上し、制動制御の質をさらに高めることができる。
【0020】
本発明の第8特徴構成は、前記制御手段は、前記モータが停止される場合、前記演算又は決定した相関関係に基づいた印加電流を、前記調圧弁が閉じる側に補正する点にある。
【0021】
モータが停止される場合、ポンプからのブレーキ液の供給が停止するので、差圧を保つためにはホイールシリンダ側のブレーキ液が調圧弁を流通してリークするのを防止する必要がある。また、ポンプからのブレーキ液の供給が停止した状態では、一旦ブレーキ液がリークすると差圧を回復することができない。そこで、本構成のように、モータを停止させる場合には、調圧弁が閉じる側に印加電流を補正して、調圧弁の閉状態を確実に保つこととしてもよい。印加電流をこのように補正することにより、ホイールシリンダ液圧が低下することを防止して、ホイールシリンダ液圧の制御精度を一層向上させることができ、制動制御の質をさらに高めることができる。
【図面の簡単な説明】
【0022】
【図1】本発明の第1実施形態に係る制動制御装置を示す概略ブロック図である。
【図2】本発明の第1実施形態の制動制御装置の制御ロジックを示すブロック図である。
【図3】調圧弁における印加電流と差圧との相関関係を示すグラフである。
【図4】第1実施形態における調圧弁制御の流れを示すフローチャートである。
【図5】本発明の第2実施形態に係る制動制御装置を示す概略ブロック図である。
【図6】本発明の第2実施形態の制動制御装置の制御ロジックを示すブロック図である。
【図7】第2実施形態における調圧弁制御の流れを示すフローチャートである。
【発明を実施するための形態】
【0023】
[第1実施形態]
本発明に係る制動制御装置の第1実施形態を図面に基づいて説明する。
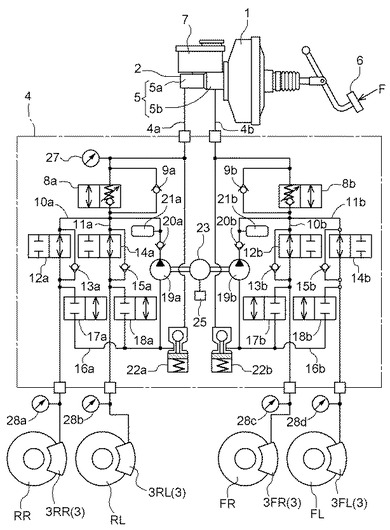
この制動制御装置は、図1に示すように、ブレーキ操作力をブースタ1により増幅してマスタシリンダ液圧を発生するマスタシリンダ2と、マスタシリンダ液圧を各車輪のホイールシリンダ3に付与する液圧回路4とを備えている。
四つの各車輪、即ち、右前輪FR、左前輪FL、右後輪RR及び左後輪RLに対して夫々ホイールシリンダ3FR,3FL,3RR,3RLを設けている。マスタシリンダ2にて発生したマスタシリンダ液圧は、液圧回路4を介して各ホイールシリンダ3に伝達される。
【0024】
マスタシリンダ2は、二つの液圧室5を設けたタンデム型のシリンダである。マスタシリンダ2は、二つの液圧室5の夫々において、マスタシリンダ液圧を発生する。マスタシリンダ2の二つの液圧室5の夫々と連通するマスタリザーバ7を備えている。また、マスタリザーバ7は、マスタシリンダ2にブレーキ液を供給したり、マスタシリンダ2の余剰のブレーキ液を貯留する。また、ブースタ1は、ブレーキ操作力を増幅した力でマスタシリンダ2のピストンロッドを押圧するように構成してある。
【0025】
液圧回路4は、マスタシリンダ2の一方の液圧室5aと右側後輪RRのホイールシリンダ3RRと左後輪RLのホイールシリンダ3RLとを連通する第1液圧回路4aと、マスタシリンダ2の他方の液圧室5bと右前輪FRのホイールシリンダ3FRと左前輪FLのホイールシリンダ3FLとを連通する第2液圧回路4bとから構成されている。
【0026】
第1液圧回路4aには、連通位置と調圧位置との二位置に切換自在な調圧弁8aが設けられている。調圧弁8aは、調圧位置において、調圧弁8aの下流側であるマスタシリンダ2側の液圧(マスタシリンダ液圧Pm)より、調圧弁8aの上流側であるホイールシリンダ3側(ホイールシリンダ液圧Pw)の液圧の方が高い液圧となるようにマスタシリンダ液圧Pmとホイールシリンダ液圧Pwとの間に差圧Pdを発生させるように構成してある。調圧弁8aは、調圧位置において、印加される電流に応じてその開度を変化させ、流通する液の流量を変化させて差圧Pdを調整する。
【0027】
調圧弁8aに対して並列に、マスタシリンダ2側からホイールシリンダ3側へのブレーキ液の流れを許容し、且つ、逆方向の流れを禁止する差圧用逆止弁9aを設けている。差圧用逆止弁9aは、調圧弁8aが閉じ状態であっても、マスタシリンダ2の側からホイールシリンダ3の側へのブレーキ液の流れを許容してマスタシリンダ液圧をホイールシリンダ3に付与する。
【0028】
第1液圧回路4aは、調圧弁8aよりもホイールシリンダ3の側が第1分岐路10aと第2分岐路11aとに分岐され、第1分岐路10a及び第2分岐路11aの夫々がホイールシリンダ3RR、3RLの夫々に接続されている。第1分岐路10aには、連通位置と遮断位置との2位置に切換自在で常開の第1常開制御弁12aを設けている。第1常開制御弁12aに対して並列に、ホイールシリンダ3の側からマスタシリンダ2の側へのブレーキ液の流れを許容し且つ逆方向の流れを禁止する第1逆止弁13aを設けている。第2分岐路11aには、第1分岐路10aと同様に、第1常開制御弁12aに対応する第2常開制御弁14aと第1逆止弁13aに対応する第2逆止弁15aとを設けている。
【0029】
第1分岐路10aの第1常開制御弁12aよりもホイールシリンダ3の側から分岐された流路部分と第2分岐路11aの第2常開制御弁14aよりもホイールシリンダ3の側から分岐された流路部分とが合流する分岐合流路16aを設けている。分岐合流路16aにおいて第1分岐路10aから分岐された流路部分には、連通位置と遮断位置との二位置に切換自在で常閉の第1常閉制御弁17aを設けている。
また、第2分岐路11aから分岐された流路部分にも、連通位置と遮断位置との2位置に切換自在で常閉の第2常閉制御弁18aを設けている。分岐合流路16aの合流部分には、液圧ポンプ19a、第3逆止弁20a、ダンパ21aを順に設け、第1液圧回路4aにおける調圧弁8aと第1常開制御弁12a及び第2常開制御弁14aとの間に接続している。液圧ポンプ19aは、モータ23により回転駆動され、ブレーキ液を所定の圧力に加圧して吐出するように構成してある。分岐合流路16aにおいて、第1常閉制御弁17a及び第2常閉制御弁18aと液圧ポンプ19aとの間にはリザーバ22aを設けてある。リザーバ22aは、第1液圧回路4aにおけるマスタシリンダ2と調圧弁8aとの間に接続してある。
【0030】
以上、液圧回路4における第1液圧回路4aの構成について説明したが、第1液圧回路4aと第2液圧回路4bとは同様の構成としており、第2液圧回路4bにも、第1液圧回路4aと同様の部材を設けてある。つまり、第2液圧回路4bにも、調圧弁8b、第1常開制御弁12b、第2常開制御弁14b、第1常閉制御弁17b、第2常閉制御弁18b、液圧ポンプ19b等の各部材を設けている。同一の部材については、第1液圧回路4aに設けた部材に対して算用数字の後に「a」を付しており、第2液圧回路4bに設けた部材に対して算用数字の後に「b」を付している。
以下、第1液圧回路4aに設けた部材と第2液圧回路4bに設けた部材との両方を示す場合には、算用数字の後の「a」及び「b」を省略して説明する。
【0031】
モータ23は、単一のモータ23により第1液圧回路4aに設けた液圧ポンプ19aと第2液圧回路4bに設けた液圧ポンプ19bとを回転駆動するように構成してある。
【0032】
この制動制御装置には、モータの回転速度を検出する回転速度センサ25と、マスタシリンダ液圧を検出するマスタシリンダ液圧センサ27と、ホイールシリンダの液圧を検出するホイールシリンダ液圧センサ28とを設けてある。ホイールシリンダ液圧センサ28は、右前輪FRに対応するホイールシリンダ液圧センサ28c、左前輪FLに対応するホイールシリンダ液圧センサ28d、右後輪RRに対応するホイールシリンダ液圧センサ28a及び左側後輪RLに対応するホイールシリンダ液圧センサ28bから構成してあり、各ホイールシリンダ液圧センサ28にて、各車輪のホイールシリンダ3の液圧を各別に検出する。この実施形態では、マスタシリンダ液圧センサ27を第1液圧回路4aに設けているが、第2液圧回路4bに設けることもできる。
【0033】
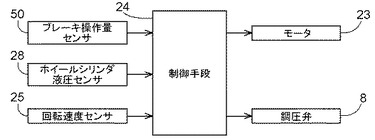
図2に示すように、制御手段24には、回転速度センサ25、マスタシリンダ液圧センサ27、ホイールシリンダ液圧センサ28、車輪の速度を検出する車輪速度センサ(図示せず)などの検出信号が入力されるように構成している。制御手段24は、CPU、ROM、RAM、入出力部を備えたマイクロコンピュータにて構成している。制御手段24は、回転速度センサ25、マスタシリンダ液圧センサ27、ホイールシリンダ液圧センサ28、車輪速度センサなどの検出信号に基づいて、調圧弁8、第1常開制御弁12、第2常開制御弁14、第1常閉制御弁17、第2常閉制御弁18、モータ23の夫々の作動を制御することにより、各ホイールシリンダ3に付与するホイールシリンダ液圧を制御するように構成してある。
【0034】
例えば、右後輪RRのホイールシリンダ3RRに付与するホイールシリンダ圧力を制御する場合について説明する。
ホイールシリンダ液圧を増圧するときには、制御手段24が、モータ23の作動により液圧ポンプ19aを作動させ且つ調圧弁8aを制御する。さらに、図1に示すように、第1常開制御弁12aを連通位置とし且つ第1常閉制御弁17aを遮断位置とする。ホイールシリンダ圧力を保持するときには、制御手段24が、第1常開制御弁12aを遮断位置に切り換え且つ第1常閉制御弁17を遮断位置とする。ホイールシリンダ圧力を減圧するときには、制御手段24が、第1常開制御弁12aを遮断位置に切り換え且つ第1常閉制御弁17aを連通位置に切り換える。
【0035】
制御手段24が、モータ23により液圧ポンプ19を回転駆動した状態において、調圧弁8を調圧位置に切り換えることにより、マスタシリンダ液圧Pmよりもホイールシリンダ液圧Pwの方を高い液圧として、マスタシリンダ液圧Pmにアシスト液圧が加圧される。制御手段24は、液圧ポンプ19の回転速度を制御するとともに、調圧位置に切り換えた調圧弁8の開度を調整する。具体的には、液圧ポンプ19から供給されたブレーキ液は、調圧弁8の開度に応じて、第1分岐路10及び第2分岐路11を介してホイールシリンダ3に供給されるものと、調圧弁8を流通してリザーバ22の側に流通するものとに分けられる。後者のリザーバ22を介して再び液圧ポンプ19に戻るブレーキ液の流量を循環流量Qrとする。
このようなブレーキ液の振り分けにより、調圧弁8のホイールシリンダ3に接続する上流側と、マスタシリンダ5に接続する下流側との液圧の差圧Pdを調節する。本実施形態では、この差圧Pdが、アシスト液圧、即ち、ホイールシリンダ液圧Pwとマスタシリンダ液圧Pmとの差圧Pdとなる。
【0036】
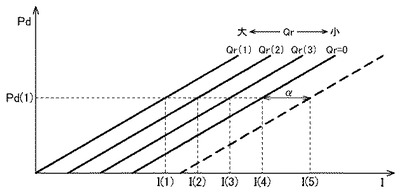
図3は、ホイールシリンダ液圧Pwとマスタシリンダ液圧Pmとの差圧Pdと調圧弁8に印加される電流との相関関係を示している。ここで、調圧弁8は印加する印加電流Iを大きくするほど開度が小さくなり、差圧Pdが大きくなるように構成されている。このような印加電流Iと差圧Pdとの関係は、調圧弁8を通過する液の循環流量Qrに応じて変化する。具体的には、図3に示すごとく、循環流量Qrが小さくなるほど、相関関係を示す線が、印加電流が大きくなる側にシフトする。
循環流量Qrに基づくこれら相関関係の選択、および、当該選択した関係に基づく印加電流Iと差圧Pdとの制御は、制御手段24が行う。例えば、モータ23の回転速度を減少させて循環流量Qrを減少させつつ差圧Pdをある値Pd(1)に保つ場合、循環流量QrがQr(1)、Qr(2)、Qr(3)と減少していくと、印加電流IをI(1)、I(2)、I(3)と増加させて、調圧弁8の開度を小さくする。モータ23が停止して循環流量Qrがゼロとなる場合には、差圧PdをPd(1)に保つために、印加電流をI(4)として調圧弁8を完全に閉状態とする。このように、目標とする差圧Pdが同じ場合であっても、循環流量Qrが大きい場合には、差圧Pdが発生し易いため、印加電流Iを低減して調圧弁8の開度を開く側に制御する。一方、循環流量Qrが小さくなる場合には差圧が発生し難くなるため、印加電流Iを増大させて調圧弁8の開度を閉じ側に制御する。
【0037】
モータ23を停止させて循環流量Qrをゼロにする場合には、さらに印加電流を増加させて調圧弁8が完全に閉じるよう制御する。このとき、調圧弁8が完全に閉じられていないと、調圧弁8を挟んだ差圧Pdがゼロになるまで、ホイールシリンダ3の側のブレーキ液が、第1分岐路10及び第2分岐路11を介してリザーバ22にリークすることとなり、適切なブレーキ力を発揮できなくなる。
そのため、本実施形態では、モータ23を停止する場合の印加電流Iと差圧Pdとの関係として、図3の各直線のうち最も右側の直線を設定してある。例えば、差圧Pd(1)を保持する場合には、印加電流IをI(4)に設定する。これにより、調圧弁8を完全に遮断されてQrがゼロとなる。
【0038】
次に、図4及び図2に基づいて、調圧弁8の制御の処理の流れについて説明する。制御手段24は、マスタシリンダ液圧センサ27が検出したマスタシリンダ液圧Pmおよびホイールシリンダ液圧センサ28が検出したホイールシリンダ液圧Pwを取得する。制御手段は、取得したマスタシリンダ液圧Pmおよびホイールシリンダ液圧Pwに基づいて、制御する調圧弁8の差圧Pdの値を決定する。具体的には、マスタシリンダ液圧Pm、ホイールシリンダ液圧Pw、及び車輪速度センサの検出結果などに基づいて、ホイールシリンダ液圧Pwの制御値を決定する。このホイールシリンダ液圧Pwの制御値とマスタシリンダ液圧Pmとの差を調圧弁8の差圧Pdの制御値とする(♯01)。
【0039】
制御手段24は、ホイールシリンダ液圧センサ28から取得したホイールシリンダ液圧Pwに基づいて、ホイールシリンダ3に流入する液の流量Qwを演算する。具体的には、ホイールシリンダ液圧Pwの時間変化に基づき、この時間変化を微分することにより、流量Qwを演算する(♯02)。
【0040】
演算手段24は、マスタシリンダ液圧センサ27が検出したマスタシリンダ液圧Pmおよびホイールシリンダ液圧センサ28が検出したホイールシリンダ液圧Pw、および、ホイールシリンダ液圧Pwの制御値などに基づいて、モータ23の回転速度の制御値を演算する。制御手段24は、モータ23が制御値で回転するように、モータ23に対して制御信号を出力する(♯03)。また、制御手段24は、回転速度センサ25から実際のモータの回転速度を取得する(♯04)。
【0041】
決定されたモータ23の回転速度の制御値がゼロでない場合、すなわちモータ23を停止しない場合(♯05のYes分岐)、制御手段24は以下に説明するように、調圧弁8を流通する液の循環流量Qrを演算する。つまり、制御手段24は、回転速度センサ25から取得した回転速度に基づいて、液圧ポンプ19の吐出流量Qpを演算する(♯06)。また、制御手段24は、演算した流量Qw及び液圧ポンプ19の吐出流量Qpに基づいて、調圧弁8を流通する循環流量Qrを演算する。つまり、液圧ポンプ19から吐出された液のうちの一部又は全部が、調圧弁8を介して循環するとともに、残りの液がホイールシリンダ3に流入することになる。したがって、液圧ポンプ19の吐出流量Qpから流量Qwを差し引くことにより、循環流量Qrが演算できる(♯07)。
【0042】
制御手段24は、演算した循環流量Qrに基づいて、循環流量Qr毎に異なる印加電流Iと差圧Pdとの相関関係(図3を参照)の中から循環流量Qrに応じた一つの相関関係を決定する。制御手段24は、決定された相関関係により、演算された差圧Pdに対応した印加電流Iを決定し、決定された印加電流Iを調圧弁8に対して印加する(♯08)。
【0043】
一方、決定されたモータ23の回転速度の制御値がゼロである場合、すなわちモータ23を停止する場合(♯05のNo分岐)、モータ回転数がゼロの場合の印加電流Iと差圧Pdとの相関関係(図3のQr=0を参照)に基づいて調圧弁8に対して印加する電流が決定される。
【0044】
このように、循環流量Qrに基づいて、調圧弁8への印加電流Iを制御することにより、ポンプ19からの液の吐出量Qpを適宜変化させた場合でも、差圧Pdを適切に目標の値に制御することができる。この結果、ホイールシリンダ液圧Pwを迅速に目標の液圧に制御することができる。
【0045】
[第2実施形態]
本発明に係る制動制御装置の第2実施形態を図面に基づいて説明する。
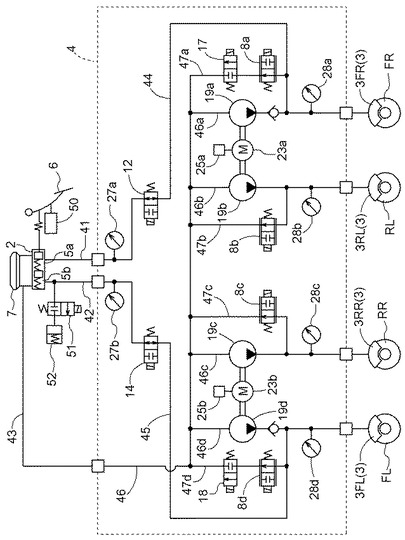
この制動制御装置は、図5に示すように、ブレーキペダル6(本発明のブレーキ操作部材に相当)、ブレーキ操作量センサ50(本発明のブレーキ操作量検出手段に相当)、マスタシリンダ2、ストローク制御弁51、ストロークシミュレータ52、液圧回路4などが備えられている。
【0046】
ドライバによってブレーキペダル6が踏み込まれると、ブレーキペダル6のブレーキ操作量がブレーキ操作量センサ50に入力され、ブレーキ操作量センサ50から操作量に応じた検出信号が出力される。この検出信号は制御手段24に入力され、制御手段24でブレーキ操作量が検出される。ブレーキ操作量センサ50としては、踏力センサやストロークセンサ等を用いることができる。また、後述するマスタシリンダ液圧センサ27の検出信号に基づいてドライバによるブレーキペダル6の操作状態を検出できるようにしてもよい。
【0047】
マスタシリンダ2の夫々の液圧室5a,5bと液圧回路4とを接続する流路41,42が備えられている。また、マスタシリンダ2には、マスタシリンダ2にブレーキ液を供給したり、マスタシリンダ2の余剰のブレーキ液を貯留するマスタリザーバ7を備える。このマスタリザーバ7からは、液圧回路4に向けて直接流路43が設けられている。
【0048】
ストロークシミュレータ52は、液圧室5b内のブレーキ液を収容する役割を果たす。ストロークシミュレータ4と液圧室5bとを接続する流路には、当該流路の連通・遮断状態を制御する常閉型の二位置弁により構成されたストローク制御弁51が備えられる。このストローク制御弁51により、ストロークシミュレータ52へのブレーキ液の流動が制御できるように構成されている。
【0049】
液圧回路4は、以下のように構成されている。
つまり、液圧室5aと前輪FRに対応するホイールシリンダ3FRとを接続するべく、流路41に接続される流路44が備えられている。この流路44には、第1常開制御弁12が備えられている。第1常開制御弁12は、非通電時には連通状態、通電時には遮断状態となる二位置弁であり、この第1常開制御弁12によって流路44の連通・遮断状態が制御される。
【0050】
また、液圧室5bと前輪FLに対応するホイールシリンダ3FLを接続するべく、流路42に接続される流路45が備えられている。この流路45には、第2常開制御弁14が備えられている。第2常開制御弁14は、非通電時には連通状態、通電時には遮断状態となる二位置弁であり、この第2常開制御弁14によって流路45の連通・遮断状態が制御される。
【0051】
また、マスタリザーバ7から延設された流路43に接続される流路46が設けられている。この流路46は、流路46a,46b,46c,46dに分岐している。そして、流路46aがホイールシリンダ3FRに、流路46bがホイールシリンダ3RLにそれぞれ接続されている。また、流路46cがホイールシリンダ3RRに、流路46dがホイールシリンダ3FLにそれぞれ接続されている。
【0052】
各流路46a〜46dには、それぞれ1つずつポンプ19a,19b,19c,19dが備えられている。ポンプ19a〜19dのうち、ポンプ19a,19bは、モータ23aによって駆動され、ポンプ19c,19dは、モータ23bによって駆動される。
【0053】
また、ポンプ19a〜19dのそれぞれには、並列的に循環流路47a,47b,47c,47dが備えられている。循流路47a〜47dは、ポンプ19a〜19dから吐出されるブレーキ液の一部をポンプ19a〜19dに循環させる。
【0054】
循環流路47aには、直列的に接続された第1常閉制御弁17と調圧弁8aが備えられる。第1常閉制御弁17がポンプ19aの吸入ポート側(上流側)に調圧弁8aが吐出ポート側(下流側)に位置するように配置されている。また、循環流路47bには、調圧弁8bが備えられている。
【0055】
循環流路47cには、調圧弁8cが備えられている。また、循環流路47dには、直列的に接続された第2常閉制御弁18と調圧弁8dが備えられる。第2常閉制御弁18がポンプ19dの吸入ポート側(上流側)に調圧弁8cが吐出ポート側(下流側)に位置するように配置されている。
上述の調圧弁8a〜8dは、上述の第1実施形態と同様に、印加される電流に応じてその開度を変化させ、流通する液の流量を制御する。
【0056】
流路46a〜46dそれぞれの各ポンプ19a〜19dと各ホイールシリンダ3FR〜3RRの間にホイールシリンダ液圧センサ28a,28b,28c,28dが設けられる。これにより、各ホイールシリンダ液圧が検出できるように構成されている。また、流路44の第1常開制御弁12よりも上流側にマスタシリンダ液圧センサ27aが、流路45の第2常開制御弁14よりも上流側にマスタシリンダ液圧センサ27bが、それぞれ設けられている。これにより、マスタシリンダ液圧を検出できるように構成されている。
【0057】
図6に示すように、制御手段24には、回転速度センサ25、ブレーキ操作量センサ50、ホイールシリンダ液圧センサ28などの検出信号が入力されるように構成している。
制御手段24は、回転速度センサ25、ホイールシリンダ液圧センサ28、ブレーキ操作量センサ50などの検出信号に基づいて、調圧弁8、第1常開制御弁12、第2常開制御弁14、第1常閉制御弁17、第2常閉制御弁18、モータ23の夫々の作動を制御することにより、各ホイールシリンダ3に付与するホイールシリンダ液圧を制御するように構成してある。
【0058】
続いて、上記のように構成される制動制御装置の作動について、通常ブレーキ時と車両用ブレーキ制御装置に異常が発生した異常時の場合とに分けて説明する。
【0059】
(1)通常ブレーキ時の動作
通常ブレーキ時においては、第1、第2常開制御弁12,14への通電は共にONされ、第1、第2常閉制御弁17,18への通電も共にONされる。これにより、第1、第2常開制御弁12,14は共に遮断状態、第1、第2常閉制御弁17,18は共に連通状態とされる。
【0060】
また、調圧弁8a〜8dは、印加電流Iを制御することにより、ポンプの上下流間に発生させる差圧Pdが制御される。ストローク制御弁51は、通電がONされる。このため、ストロークシミュレータ52が液圧室5bと連通状態となり、ブレーキペダル6が踏み込まれたときに、液圧室5b内のブレーキ液がストロークシミュレータ52に移動することになる。したがって、ドライバがブレーキペダル6を踏み込んだときに踏み込みに応じた反力を得つつ、ブレーキペダル6が踏み込めるようになっている。
【0061】
制御手段24は、ブレーキペダル6のブレーキ操作量に応じて、液圧ポンプ19a〜19dの回転速度を制御するとともに、調圧弁8a〜8dの開度を調節する。具体的には、液圧ポンプ19aから供給されたブレーキ液は、調圧弁8aの開度に応じてホイールシリンダ3FRに供給されるものと、調圧弁8aを流通して循環するものとに分けられる。このようなブレーキ液の振り分けにより、調圧弁8aのホイールシリンダ3に接続する上流側と、下流側との液圧の差圧Pdを調節する。本実施形態では、この差圧Pdがホイールシリンダ液圧Pwとなる。調圧弁8b〜8dについても同様に差圧Pdを調整する。
【0062】
この実施形態においても、上述の第1実施形態と同様に、循環流量Qrが小さくなるほど、相関関係を示す線が、印加電流Iが大きくなる側にシフトする(図3を参照)。制御手段24により、循環流量Qrに基づくこれら相関関係の選択、および、当該選択した関係に基づく印加電流Iと差圧Pdとの制御を行う。
【0063】
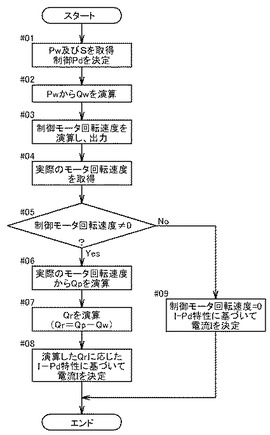
次に、図6及び図7に基づいて、調圧弁8の制御の処理の流れについて説明する。なお、この処理は全ての調圧弁8に共通するものであり、算用数字の後の「a」、「b」、「c」、「d」を省略して説明する。
制御手段24は、ホイールシリンダ液圧センサ28が検出したホイールシリンダ液圧Pw及びブレーキ操作量センサ50が検出した操作量Sを取得する。制御手段24は、取得した操作量Sに基づいて、制御する調圧弁8の差圧Pdの値を決定する。(♯01)。
【0064】
制御手段24は、ホイールシリンダ液圧センサ28から取得したホイールシリンダ液圧Pwに基づいて、ホイールシリンダ3に流入する液の流量Qwを演算する。(♯02)。
【0065】
演算手段24は、ホイールシリンダ液圧センサ28が検出したホイールシリンダ液圧Pw、ブレーキ操作量センサ50が検出した操作量S、および、ホイールシリンダ液圧Pwの制御値などに基づいて、モータ23の回転速度の制御値を演算する。制御手段24は、モータ23が制御値で回転するように、モータ23に対して制御信号を出力する(♯03)。また、制御手段24は、回転速度センサ25から実際のモータの回転速度を取得する(♯04)。
【0066】
決定されたモータ23の回転速度の制御値がゼロでない場合、すなわちモータ23を停止しない場合(♯05のYes分岐)、制御手段24は以下に説明するように、調圧弁8を流通する液の循環流量Qrを演算する。つまり、制御手段24は、回転速度センサ25から取得した回転速度に基づいて、液圧ポンプ19の吐出流量Qpを演算する(♯06)。また、制御手段24は、演算した流量Qw及び液圧ポンプ19の吐出流量Qpに基づいて、調圧弁8を流通する循環流量Qrを演算する。つまり、液圧ポンプ19から吐出された液のうちの一部又は全部が、調圧弁8を介して循環するとともに、残りの液がホイールシリンダ3に流入することになる。したがって、液圧ポンプ19の吐出流量Qpから流量Qwを差し引くことにより、循環流量Qrが演算できる(♯07)。
【0067】
制御手段24は、演算した循環流量Qrに基づいて、循環流量Qr毎に異なる印加電流Iと差圧Pdとの相関関係(図3を参照)の中から循環流量Qrに応じた一つの相関関係を決定する。制御手段24は、決定された相関関係により、演算された差圧Pdに対応した印加電流Iを決定し、決定された印加電流Iを調圧弁8に対して印加する(♯08)。
【0068】
一方、決定されたモータ23の回転速度の制御値がゼロである場合、すなわちモータ23を停止する場合(♯05のNo分岐)、モータ回転数がゼロの場合の印加電流Iと差圧Pdとの相関関係(図3のQr=0を参照)に基づいて調圧弁8に対して印加する電流が決定される。
【0069】
(2)異常時のブレーキ動作
異常時には、制御部24から制御信号が出力できなくなるか、もしくは、各種弁やモータ23a,23bが正常に駆動されない可能性がある。従って、各種弁やモータ23a,23bに対する通電がOFFにされる。
【0070】
つまり、第1、第2常開制御弁12,14への通電が共にOFFとなるため、これらは共に連通状態となる。第1、第2常閉制御弁17,18への通電も共にOFFとなるため、これらは共に遮断状態とされる。
【0071】
また、調圧弁8a〜8dについても、通電がOFFとなるため、連通状態となる。ストローク制御弁51も通電がOFFとなるため、ストロークシミュレータ52と液圧室5bとの間が遮断状態となる。
さらに、モータ23a,23bへの通電が共にOFFとなり、ポンプ19a〜19dによるブレーキ液の吸入・吐出も停止される。
【0072】
このような状態において、液圧室5aは、流路41,44,46aを介してホイールシリンダ3FRと連通した状態となる。また、液圧室5bは、流路42,45,46dを通じてホイールシリンダ3FLと連通した状態となる。
【0073】
このため、ブレーキペダル6が踏み込まれ、加えられた踏力に応じて液圧室5aおよび液圧室5bにマスタシリンダ液圧が発生すると、このマスタシリンダ液圧がホイールシリンダ液圧としてホイールシリンダ3FL、3FRに伝えられる。これにより、両前輪FL、FRに対して制動力が発生する。
【0074】
[別実施形態]
(1)上述の実施形態において、ホイールシリンダ液圧センサ28は必ずしも備える必要はない。この場合、ブレーキ操作が行われた後、マスタシリンダ液圧とホイールシリンダ液圧とが安定した定常状態となった後に循環流量Qrが演算される。つまり、定常状態においては、液圧ポンプ19から吐出された液が全て調圧弁8を流通して循環することになる。このため、液圧ポンプ19からの吐出流量Qpと循環流量Qrとが等しくなる。従って、モータ23の回転速度に基づいて吐出流量Qpを演算することにより、循環流量Qrを演算することができる。
【0075】
(2)上記実施形態では、モータ23の回転速度をゼロにする際には、循環流量Qrがゼロの場合として予め設定した相関関係に基づいて、印加電流Iと差圧Pdとを制御する例を示した。しかし、ポンプ19の流量がゼロの場合として、次のように設定することもできる。
即ち、図3に示したごとく、四本の実線の他に、さらに印加電流Iの大きい側に破線で示す補正線を設定する。液圧ポンプ19が停止した状態で、仮に調圧弁8の遮断程度が緩いと、ブレーキ液は調圧弁8でリークする。その場合、Pd(1)を維持することができず、また、液圧ポンプ19が停止しているため差圧Pdを再びPd(1)に戻すこともできない。このような事態を防止するためには、調圧弁8の閉状態を確実に維持する必要がある。そこで、モータ23を停止する場合には、通常、調圧弁8が完全に閉状態となる位置よりもさらに閉じ側に制御する。つまり、制御手段24により、図3の右端の実線に対して印加電流Iがαだけ多くなるように補正制御する。これにより、調圧弁8をより確実に遮断することができる。
また、必ずしも、モータ23の回転速度がゼロの場合にのみ印加電流Iを補正制御する必要はなく、循環流量Qrが漸減するに従って印加電流Iの補正量を漸増させるように構成しても良い。
【0076】
(3)上述の実施形態において、さらに、制御手段24が、ブレーキ液の温度(フルード温度)に基づいて、循環流量Qrを補正することとしてもと良い。
フルード温度は、種々の方法によって計測することができる。例えば液圧回路4のブレーキ液の流路に温度センサを設けて、フルード温度を直に検出することができる。また、液圧回路4の近傍に温度センサを設けて、ここからフルード温度を推算しても良い。さらに、調圧弁8の作動時間に基づいてフルード温度を推算しても良いし、エンジンシステムなど、液圧回路4以外のシステムで検出又は推定された温度に基づいてフルード温度を推算しても良い。
循環流量Qrは、フルード温度の変化に伴う体積や粘度の変化によって変化する。したがって、上述のごとく検出又は推算したフルード温度に基づいて循環流量Qrを補正することにより、正確に循環流量Qrを演算することができる。
【0077】
(4)上述の実施形態において、差圧Pdと印加電流Iの相関関係として、直線の相関関係を示したが、相関関係は直線に限られるものではなく、例えば曲線など、調圧弁8の特性に応じて適宜設定することができる。
【0078】
(5)上述の実施形態では、調圧弁8を流通する液の循環流量Qrに基づき、目標となる差圧Pdが得られるよう印加電流Iを演算する一例として、循環流量Qr毎に異なる印加電流Iと差圧Pdとの相関関係を備えた例について説明したが、これに限られるものではない。例えば、循環流量Qr、印加電流I、及び差圧Pdの関係を示したマップを備え、循環流量Qrと目標とする差圧Pdとに基づき、このマップから印加電流Iを決定しても良い。
【0079】
本発明は、ブレーキ操作力に基づいてマスタシリンダ液圧を発生させるマスタシリンダと、前記マスタシリンダ液圧に基づいて各車輪にホイールシリンダ液圧を発生させる液圧回路と、前記マスタシリンダ液圧に加圧するアシスト液圧を発生させるモータの回転により駆動するポンプとを備えた制動制御装置であれば、四輪自動車用に限らず、二輪車、鉄道、自走式のクレーン等様々な装置に適用可能である。
【産業上の利用可能性】
【0080】
本発明は、自動車その他の車両のブレーキに利用可能である。
【符号の説明】
【0081】
2 マスタシリンダ
4 液圧回路
6 ブレーキ
8 調圧弁
19 ポンプ
24 制御手段
25 回転速度センサ
27 マスタシリンダ液圧センサ
28 ホイールシリンダ液圧センサ
Pd 差圧
Pm マスタシリンダ液圧
Pw ホイールシリンダ液圧
Qp 吐出流量
Qr 循環流量
【技術分野】
【0001】
本発明は、ブレーキ操作力に基づいてマスタシリンダ液圧を発生させるマスタシリンダと、前記マスタシリンダ液圧に基づいて各車輪にホイールシリンダ液圧を発生させる液圧回路と、前記マスタシリンダ液圧に加圧するアシスト液圧を発生させるモータの回転により駆動するポンプとを備えた制動制御装置に関する。
【背景技術】
【0002】
この種の制動制御装置は、モータの回転駆動によって、ポンプから吐出される液の一部をポンプに循環させる循環流路が設けられ、ポンプから吐出された液の一部をホイールシリンダに供給することなくポンプに循環させている。この循環流路には、調圧弁が設けられ、調圧弁の上流側と下流側との差圧が調節される。具体的には、前記差圧と印加する電流との相関関係が備えられ、この相関関係に基づいて求める差圧に応じた電流が調圧弁に印加される。このように、差圧を調節することにより、ホイールシリンダ液圧が制御される(例えば、特許文献1)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2001−71755号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
このような制動制御装置においては、モータを一定速度で回転させてポンプを駆動させるため、ポンプに循環する液量は変化しない。しかし、ポンプを駆動させる際に、モータの回転速度を変化させた場合、ポンプに循環する液量が変化するため、ホイールシリンダ液圧の制御精度が悪化する。
【0005】
本発明は、上述の問題点に鑑みてなされたものであり、ホイールシリンダ液圧の制御精度を向上し得る制動制御装置を提供することにある。
【課題を解決するための手段】
【0006】
本発明の第1特徴構成は、ドライバによって操作されるブレーキ操作部材と、各車輪に配設されたホイールシリンダに対してホイールシリンダ液圧を供給する液圧回路と、モータの回転により駆動し前記ホイールシリンダ液圧が前記ブレーキ操作部材の操作に応じた値となるよう前記液圧回路に液圧を発生させるポンプと、前記ポンプから吐出されるブレーキ液の一部を前記ポンプに循環させるべく前記液圧回路の一部を共有する状態に設けた循環流路とを備えると共に、当該循環流路に設けられ、前記液圧回路の前記ホイールシリンダ側に接続する上流側と下流側との差圧を調節可能な調圧弁と、前記調圧弁を流通するブレーキ液の循環流量に基づき、目標となる前記差圧が得られる電流値を演算して前記調圧弁への印加電流を制御する制御手段を備えた点にある。
【0007】
ポンプから吐出された液が調圧弁を通過する際には、調圧弁の上流側と下流側とで液の差圧が生じる。この差圧は、単に調圧弁の開度によって決定されるものではなく、流通する液の流量や粘性、あるいは、調圧弁固有の流路形状等によって影響を受ける。液が流体であるが故に生じるこのような特性は定性的に把握することは困難である。
そこで、本構成では、液の吐出量を変化させた場合に、調圧弁を通過する液の循環流量が変化することに注目し、調圧弁を流通する液の循環流量を把握して、この循環流量に基づいて目標となる差圧を得るための電流値を演算し、調圧弁への印加電流を制御する制御手段を備えた。
この結果、例えば、ポンプからの液の吐出量を変化させた場合でも、調圧弁を流通する液の循環流量は、そのときの液の特性や調圧弁の個別特性を最も反映したパラメーターとなるため、ホイールシリンダ液圧の制御精度を向上することができる。
【0008】
本発明の第2特徴構成は、前記ポンプから吐出されるブレーキ液のみで前記ホイールシリンダ液圧を発生可能に構成され、前記ブレーキ操作部材の操作量を検出するブレーキ操作量検出手段を備え、前記ホイールシリンダ液圧が前記ブレーキ操作量検出手段の検出結果に応じた値となるよう前記ポンプが駆動される点にある。
【0009】
本構成において、ポンプから吐出されるブレーキ液のみでホイールシリンダ液圧を発生させる場合、調圧弁の上流側と下流側との差圧がホイールシリンダ液圧となる。従って、上述のように差圧を適切に制御することにより、ホイールシリンダ液圧の制御精度を向上することができる。
【0010】
本発明の第3特徴構成は、ブレーキ操作部材の操作に基づいて前記液圧回路にマスタシリンダ液圧を発生させるマスタシリンダと、前記マスタシリンダ液圧を検出するマスタシリンダ液圧検出手段とを備え、前記ホイールシリンダ液圧が前記マスタシリンダ液圧検出手段の検出結果に応じた値となるように、前記ポンプが前記マスタシリンダ液圧に対して加圧するアシスト液圧を発生させる点にある。
【0011】
本構成では、調圧弁の上流側と下流側との差圧がアシスト液圧となり、マスタシリンダ液圧とアシスト液圧との和がホイールシリンダ液圧となる。従って、上述のように差圧を適切に制御することにより、ホイールシリンダ液圧の制御精度を向上することができる。
【0012】
本発明の第4特徴構成は、前記制御手段は、前記循環流量に基づき、前記循環流量毎に異なる前記印加電流と前記差圧との相関関係の中から一つの相関関係を決定し、当該決定した相関関係に基づいて前記調圧弁への印加電流を制御する点にある。
【0013】
本構成では、循環流量毎に、調圧弁が有する印加電流―圧力特性を把握することとし、そのときの循環流量に応じた最適の相関関係を利用して調圧弁の開度を調節することとした。つまり、ある瞬間の循環流量を把握して、その次に設定したい調圧弁の差圧に応じた電流を調圧弁に印加する。この結果、調圧弁の開度が変更され、循環流量が変化して差圧が再設定される。状態が安定すれば、さらにそのときの循環流量を把握し、さらに次の差圧調整に備えて当該循環流量に応じた調圧弁の印加電流−圧力特性を把握しておく。
このような制御を繰り返し行うことで、調圧弁を最適に制御することができ、良好な制動感覚を発揮する制動制御装置を得ることができる。
【0014】
本発明の第5特徴構成は、前記モータの回転速度を検出する回転速度検出手段を備え、前記制御手段は、ブレーキ操作が行われた後、前記ホイールシリンダ液圧が安定した状態で、前記検出された回転速度に基づいて前記循環流量を演算する点にある。
【0015】
ブレーキ操作がされ、ホイールシリンダ液圧が安定した状態では、ポンプから吐出される液は調圧弁を通過して再びポンプに還流し、この循環状態が持続される。よって、この状態では、ポンプからの吐出流量と、調圧弁を通過する液の循環流量とが等しくなる。従って、この状態でモータの回転速度を検出することにより、循環流量が把握できるため、調圧弁の印加電流−圧力特性を正確に把握することができる。この結果、最適な制動効果を得ることができる。
【0016】
本発明の第6特徴構成は、前記モータの回転速度を検出する回転速度検出手段を備えると共に、前記ホイールシリンダ液圧を検出するホイールシリンダ液圧検出手段を備え、前記制御手段は、前記検出された回転速度と前記ホイールシリンダ液圧の変化量とに基づいて前記循環流量を演算する点にある。
【0017】
本構成のように、モータの回転速度とホイールシリンダ液圧の変化量とに基づいて循環流量を算出することにより、ホイールシリンダ液圧とが安定するのを待つまでもなく調圧弁での循環流量を算出することができる。このため、調圧弁の印加電流−圧力特性を迅速に把握することができ、制動制御がより正確なものとなる。
【0018】
本発明の第7特徴構成は、前記ブレーキ液の温度に基づいて、前記制御手段は、前記循環流量を補正する点にある。
【0019】
循環流量は、液の温度の変化に伴う体積や粘度の変化によって変化する。したがって、本構成のように、ブレーキ液の温度に基づいて循環流量を補正することにより、循環流量の算出精度が向上し、制動制御の質をさらに高めることができる。
【0020】
本発明の第8特徴構成は、前記制御手段は、前記モータが停止される場合、前記演算又は決定した相関関係に基づいた印加電流を、前記調圧弁が閉じる側に補正する点にある。
【0021】
モータが停止される場合、ポンプからのブレーキ液の供給が停止するので、差圧を保つためにはホイールシリンダ側のブレーキ液が調圧弁を流通してリークするのを防止する必要がある。また、ポンプからのブレーキ液の供給が停止した状態では、一旦ブレーキ液がリークすると差圧を回復することができない。そこで、本構成のように、モータを停止させる場合には、調圧弁が閉じる側に印加電流を補正して、調圧弁の閉状態を確実に保つこととしてもよい。印加電流をこのように補正することにより、ホイールシリンダ液圧が低下することを防止して、ホイールシリンダ液圧の制御精度を一層向上させることができ、制動制御の質をさらに高めることができる。
【図面の簡単な説明】
【0022】
【図1】本発明の第1実施形態に係る制動制御装置を示す概略ブロック図である。
【図2】本発明の第1実施形態の制動制御装置の制御ロジックを示すブロック図である。
【図3】調圧弁における印加電流と差圧との相関関係を示すグラフである。
【図4】第1実施形態における調圧弁制御の流れを示すフローチャートである。
【図5】本発明の第2実施形態に係る制動制御装置を示す概略ブロック図である。
【図6】本発明の第2実施形態の制動制御装置の制御ロジックを示すブロック図である。
【図7】第2実施形態における調圧弁制御の流れを示すフローチャートである。
【発明を実施するための形態】
【0023】
[第1実施形態]
本発明に係る制動制御装置の第1実施形態を図面に基づいて説明する。
この制動制御装置は、図1に示すように、ブレーキ操作力をブースタ1により増幅してマスタシリンダ液圧を発生するマスタシリンダ2と、マスタシリンダ液圧を各車輪のホイールシリンダ3に付与する液圧回路4とを備えている。
四つの各車輪、即ち、右前輪FR、左前輪FL、右後輪RR及び左後輪RLに対して夫々ホイールシリンダ3FR,3FL,3RR,3RLを設けている。マスタシリンダ2にて発生したマスタシリンダ液圧は、液圧回路4を介して各ホイールシリンダ3に伝達される。
【0024】
マスタシリンダ2は、二つの液圧室5を設けたタンデム型のシリンダである。マスタシリンダ2は、二つの液圧室5の夫々において、マスタシリンダ液圧を発生する。マスタシリンダ2の二つの液圧室5の夫々と連通するマスタリザーバ7を備えている。また、マスタリザーバ7は、マスタシリンダ2にブレーキ液を供給したり、マスタシリンダ2の余剰のブレーキ液を貯留する。また、ブースタ1は、ブレーキ操作力を増幅した力でマスタシリンダ2のピストンロッドを押圧するように構成してある。
【0025】
液圧回路4は、マスタシリンダ2の一方の液圧室5aと右側後輪RRのホイールシリンダ3RRと左後輪RLのホイールシリンダ3RLとを連通する第1液圧回路4aと、マスタシリンダ2の他方の液圧室5bと右前輪FRのホイールシリンダ3FRと左前輪FLのホイールシリンダ3FLとを連通する第2液圧回路4bとから構成されている。
【0026】
第1液圧回路4aには、連通位置と調圧位置との二位置に切換自在な調圧弁8aが設けられている。調圧弁8aは、調圧位置において、調圧弁8aの下流側であるマスタシリンダ2側の液圧(マスタシリンダ液圧Pm)より、調圧弁8aの上流側であるホイールシリンダ3側(ホイールシリンダ液圧Pw)の液圧の方が高い液圧となるようにマスタシリンダ液圧Pmとホイールシリンダ液圧Pwとの間に差圧Pdを発生させるように構成してある。調圧弁8aは、調圧位置において、印加される電流に応じてその開度を変化させ、流通する液の流量を変化させて差圧Pdを調整する。
【0027】
調圧弁8aに対して並列に、マスタシリンダ2側からホイールシリンダ3側へのブレーキ液の流れを許容し、且つ、逆方向の流れを禁止する差圧用逆止弁9aを設けている。差圧用逆止弁9aは、調圧弁8aが閉じ状態であっても、マスタシリンダ2の側からホイールシリンダ3の側へのブレーキ液の流れを許容してマスタシリンダ液圧をホイールシリンダ3に付与する。
【0028】
第1液圧回路4aは、調圧弁8aよりもホイールシリンダ3の側が第1分岐路10aと第2分岐路11aとに分岐され、第1分岐路10a及び第2分岐路11aの夫々がホイールシリンダ3RR、3RLの夫々に接続されている。第1分岐路10aには、連通位置と遮断位置との2位置に切換自在で常開の第1常開制御弁12aを設けている。第1常開制御弁12aに対して並列に、ホイールシリンダ3の側からマスタシリンダ2の側へのブレーキ液の流れを許容し且つ逆方向の流れを禁止する第1逆止弁13aを設けている。第2分岐路11aには、第1分岐路10aと同様に、第1常開制御弁12aに対応する第2常開制御弁14aと第1逆止弁13aに対応する第2逆止弁15aとを設けている。
【0029】
第1分岐路10aの第1常開制御弁12aよりもホイールシリンダ3の側から分岐された流路部分と第2分岐路11aの第2常開制御弁14aよりもホイールシリンダ3の側から分岐された流路部分とが合流する分岐合流路16aを設けている。分岐合流路16aにおいて第1分岐路10aから分岐された流路部分には、連通位置と遮断位置との二位置に切換自在で常閉の第1常閉制御弁17aを設けている。
また、第2分岐路11aから分岐された流路部分にも、連通位置と遮断位置との2位置に切換自在で常閉の第2常閉制御弁18aを設けている。分岐合流路16aの合流部分には、液圧ポンプ19a、第3逆止弁20a、ダンパ21aを順に設け、第1液圧回路4aにおける調圧弁8aと第1常開制御弁12a及び第2常開制御弁14aとの間に接続している。液圧ポンプ19aは、モータ23により回転駆動され、ブレーキ液を所定の圧力に加圧して吐出するように構成してある。分岐合流路16aにおいて、第1常閉制御弁17a及び第2常閉制御弁18aと液圧ポンプ19aとの間にはリザーバ22aを設けてある。リザーバ22aは、第1液圧回路4aにおけるマスタシリンダ2と調圧弁8aとの間に接続してある。
【0030】
以上、液圧回路4における第1液圧回路4aの構成について説明したが、第1液圧回路4aと第2液圧回路4bとは同様の構成としており、第2液圧回路4bにも、第1液圧回路4aと同様の部材を設けてある。つまり、第2液圧回路4bにも、調圧弁8b、第1常開制御弁12b、第2常開制御弁14b、第1常閉制御弁17b、第2常閉制御弁18b、液圧ポンプ19b等の各部材を設けている。同一の部材については、第1液圧回路4aに設けた部材に対して算用数字の後に「a」を付しており、第2液圧回路4bに設けた部材に対して算用数字の後に「b」を付している。
以下、第1液圧回路4aに設けた部材と第2液圧回路4bに設けた部材との両方を示す場合には、算用数字の後の「a」及び「b」を省略して説明する。
【0031】
モータ23は、単一のモータ23により第1液圧回路4aに設けた液圧ポンプ19aと第2液圧回路4bに設けた液圧ポンプ19bとを回転駆動するように構成してある。
【0032】
この制動制御装置には、モータの回転速度を検出する回転速度センサ25と、マスタシリンダ液圧を検出するマスタシリンダ液圧センサ27と、ホイールシリンダの液圧を検出するホイールシリンダ液圧センサ28とを設けてある。ホイールシリンダ液圧センサ28は、右前輪FRに対応するホイールシリンダ液圧センサ28c、左前輪FLに対応するホイールシリンダ液圧センサ28d、右後輪RRに対応するホイールシリンダ液圧センサ28a及び左側後輪RLに対応するホイールシリンダ液圧センサ28bから構成してあり、各ホイールシリンダ液圧センサ28にて、各車輪のホイールシリンダ3の液圧を各別に検出する。この実施形態では、マスタシリンダ液圧センサ27を第1液圧回路4aに設けているが、第2液圧回路4bに設けることもできる。
【0033】
図2に示すように、制御手段24には、回転速度センサ25、マスタシリンダ液圧センサ27、ホイールシリンダ液圧センサ28、車輪の速度を検出する車輪速度センサ(図示せず)などの検出信号が入力されるように構成している。制御手段24は、CPU、ROM、RAM、入出力部を備えたマイクロコンピュータにて構成している。制御手段24は、回転速度センサ25、マスタシリンダ液圧センサ27、ホイールシリンダ液圧センサ28、車輪速度センサなどの検出信号に基づいて、調圧弁8、第1常開制御弁12、第2常開制御弁14、第1常閉制御弁17、第2常閉制御弁18、モータ23の夫々の作動を制御することにより、各ホイールシリンダ3に付与するホイールシリンダ液圧を制御するように構成してある。
【0034】
例えば、右後輪RRのホイールシリンダ3RRに付与するホイールシリンダ圧力を制御する場合について説明する。
ホイールシリンダ液圧を増圧するときには、制御手段24が、モータ23の作動により液圧ポンプ19aを作動させ且つ調圧弁8aを制御する。さらに、図1に示すように、第1常開制御弁12aを連通位置とし且つ第1常閉制御弁17aを遮断位置とする。ホイールシリンダ圧力を保持するときには、制御手段24が、第1常開制御弁12aを遮断位置に切り換え且つ第1常閉制御弁17を遮断位置とする。ホイールシリンダ圧力を減圧するときには、制御手段24が、第1常開制御弁12aを遮断位置に切り換え且つ第1常閉制御弁17aを連通位置に切り換える。
【0035】
制御手段24が、モータ23により液圧ポンプ19を回転駆動した状態において、調圧弁8を調圧位置に切り換えることにより、マスタシリンダ液圧Pmよりもホイールシリンダ液圧Pwの方を高い液圧として、マスタシリンダ液圧Pmにアシスト液圧が加圧される。制御手段24は、液圧ポンプ19の回転速度を制御するとともに、調圧位置に切り換えた調圧弁8の開度を調整する。具体的には、液圧ポンプ19から供給されたブレーキ液は、調圧弁8の開度に応じて、第1分岐路10及び第2分岐路11を介してホイールシリンダ3に供給されるものと、調圧弁8を流通してリザーバ22の側に流通するものとに分けられる。後者のリザーバ22を介して再び液圧ポンプ19に戻るブレーキ液の流量を循環流量Qrとする。
このようなブレーキ液の振り分けにより、調圧弁8のホイールシリンダ3に接続する上流側と、マスタシリンダ5に接続する下流側との液圧の差圧Pdを調節する。本実施形態では、この差圧Pdが、アシスト液圧、即ち、ホイールシリンダ液圧Pwとマスタシリンダ液圧Pmとの差圧Pdとなる。
【0036】
図3は、ホイールシリンダ液圧Pwとマスタシリンダ液圧Pmとの差圧Pdと調圧弁8に印加される電流との相関関係を示している。ここで、調圧弁8は印加する印加電流Iを大きくするほど開度が小さくなり、差圧Pdが大きくなるように構成されている。このような印加電流Iと差圧Pdとの関係は、調圧弁8を通過する液の循環流量Qrに応じて変化する。具体的には、図3に示すごとく、循環流量Qrが小さくなるほど、相関関係を示す線が、印加電流が大きくなる側にシフトする。
循環流量Qrに基づくこれら相関関係の選択、および、当該選択した関係に基づく印加電流Iと差圧Pdとの制御は、制御手段24が行う。例えば、モータ23の回転速度を減少させて循環流量Qrを減少させつつ差圧Pdをある値Pd(1)に保つ場合、循環流量QrがQr(1)、Qr(2)、Qr(3)と減少していくと、印加電流IをI(1)、I(2)、I(3)と増加させて、調圧弁8の開度を小さくする。モータ23が停止して循環流量Qrがゼロとなる場合には、差圧PdをPd(1)に保つために、印加電流をI(4)として調圧弁8を完全に閉状態とする。このように、目標とする差圧Pdが同じ場合であっても、循環流量Qrが大きい場合には、差圧Pdが発生し易いため、印加電流Iを低減して調圧弁8の開度を開く側に制御する。一方、循環流量Qrが小さくなる場合には差圧が発生し難くなるため、印加電流Iを増大させて調圧弁8の開度を閉じ側に制御する。
【0037】
モータ23を停止させて循環流量Qrをゼロにする場合には、さらに印加電流を増加させて調圧弁8が完全に閉じるよう制御する。このとき、調圧弁8が完全に閉じられていないと、調圧弁8を挟んだ差圧Pdがゼロになるまで、ホイールシリンダ3の側のブレーキ液が、第1分岐路10及び第2分岐路11を介してリザーバ22にリークすることとなり、適切なブレーキ力を発揮できなくなる。
そのため、本実施形態では、モータ23を停止する場合の印加電流Iと差圧Pdとの関係として、図3の各直線のうち最も右側の直線を設定してある。例えば、差圧Pd(1)を保持する場合には、印加電流IをI(4)に設定する。これにより、調圧弁8を完全に遮断されてQrがゼロとなる。
【0038】
次に、図4及び図2に基づいて、調圧弁8の制御の処理の流れについて説明する。制御手段24は、マスタシリンダ液圧センサ27が検出したマスタシリンダ液圧Pmおよびホイールシリンダ液圧センサ28が検出したホイールシリンダ液圧Pwを取得する。制御手段は、取得したマスタシリンダ液圧Pmおよびホイールシリンダ液圧Pwに基づいて、制御する調圧弁8の差圧Pdの値を決定する。具体的には、マスタシリンダ液圧Pm、ホイールシリンダ液圧Pw、及び車輪速度センサの検出結果などに基づいて、ホイールシリンダ液圧Pwの制御値を決定する。このホイールシリンダ液圧Pwの制御値とマスタシリンダ液圧Pmとの差を調圧弁8の差圧Pdの制御値とする(♯01)。
【0039】
制御手段24は、ホイールシリンダ液圧センサ28から取得したホイールシリンダ液圧Pwに基づいて、ホイールシリンダ3に流入する液の流量Qwを演算する。具体的には、ホイールシリンダ液圧Pwの時間変化に基づき、この時間変化を微分することにより、流量Qwを演算する(♯02)。
【0040】
演算手段24は、マスタシリンダ液圧センサ27が検出したマスタシリンダ液圧Pmおよびホイールシリンダ液圧センサ28が検出したホイールシリンダ液圧Pw、および、ホイールシリンダ液圧Pwの制御値などに基づいて、モータ23の回転速度の制御値を演算する。制御手段24は、モータ23が制御値で回転するように、モータ23に対して制御信号を出力する(♯03)。また、制御手段24は、回転速度センサ25から実際のモータの回転速度を取得する(♯04)。
【0041】
決定されたモータ23の回転速度の制御値がゼロでない場合、すなわちモータ23を停止しない場合(♯05のYes分岐)、制御手段24は以下に説明するように、調圧弁8を流通する液の循環流量Qrを演算する。つまり、制御手段24は、回転速度センサ25から取得した回転速度に基づいて、液圧ポンプ19の吐出流量Qpを演算する(♯06)。また、制御手段24は、演算した流量Qw及び液圧ポンプ19の吐出流量Qpに基づいて、調圧弁8を流通する循環流量Qrを演算する。つまり、液圧ポンプ19から吐出された液のうちの一部又は全部が、調圧弁8を介して循環するとともに、残りの液がホイールシリンダ3に流入することになる。したがって、液圧ポンプ19の吐出流量Qpから流量Qwを差し引くことにより、循環流量Qrが演算できる(♯07)。
【0042】
制御手段24は、演算した循環流量Qrに基づいて、循環流量Qr毎に異なる印加電流Iと差圧Pdとの相関関係(図3を参照)の中から循環流量Qrに応じた一つの相関関係を決定する。制御手段24は、決定された相関関係により、演算された差圧Pdに対応した印加電流Iを決定し、決定された印加電流Iを調圧弁8に対して印加する(♯08)。
【0043】
一方、決定されたモータ23の回転速度の制御値がゼロである場合、すなわちモータ23を停止する場合(♯05のNo分岐)、モータ回転数がゼロの場合の印加電流Iと差圧Pdとの相関関係(図3のQr=0を参照)に基づいて調圧弁8に対して印加する電流が決定される。
【0044】
このように、循環流量Qrに基づいて、調圧弁8への印加電流Iを制御することにより、ポンプ19からの液の吐出量Qpを適宜変化させた場合でも、差圧Pdを適切に目標の値に制御することができる。この結果、ホイールシリンダ液圧Pwを迅速に目標の液圧に制御することができる。
【0045】
[第2実施形態]
本発明に係る制動制御装置の第2実施形態を図面に基づいて説明する。
この制動制御装置は、図5に示すように、ブレーキペダル6(本発明のブレーキ操作部材に相当)、ブレーキ操作量センサ50(本発明のブレーキ操作量検出手段に相当)、マスタシリンダ2、ストローク制御弁51、ストロークシミュレータ52、液圧回路4などが備えられている。
【0046】
ドライバによってブレーキペダル6が踏み込まれると、ブレーキペダル6のブレーキ操作量がブレーキ操作量センサ50に入力され、ブレーキ操作量センサ50から操作量に応じた検出信号が出力される。この検出信号は制御手段24に入力され、制御手段24でブレーキ操作量が検出される。ブレーキ操作量センサ50としては、踏力センサやストロークセンサ等を用いることができる。また、後述するマスタシリンダ液圧センサ27の検出信号に基づいてドライバによるブレーキペダル6の操作状態を検出できるようにしてもよい。
【0047】
マスタシリンダ2の夫々の液圧室5a,5bと液圧回路4とを接続する流路41,42が備えられている。また、マスタシリンダ2には、マスタシリンダ2にブレーキ液を供給したり、マスタシリンダ2の余剰のブレーキ液を貯留するマスタリザーバ7を備える。このマスタリザーバ7からは、液圧回路4に向けて直接流路43が設けられている。
【0048】
ストロークシミュレータ52は、液圧室5b内のブレーキ液を収容する役割を果たす。ストロークシミュレータ4と液圧室5bとを接続する流路には、当該流路の連通・遮断状態を制御する常閉型の二位置弁により構成されたストローク制御弁51が備えられる。このストローク制御弁51により、ストロークシミュレータ52へのブレーキ液の流動が制御できるように構成されている。
【0049】
液圧回路4は、以下のように構成されている。
つまり、液圧室5aと前輪FRに対応するホイールシリンダ3FRとを接続するべく、流路41に接続される流路44が備えられている。この流路44には、第1常開制御弁12が備えられている。第1常開制御弁12は、非通電時には連通状態、通電時には遮断状態となる二位置弁であり、この第1常開制御弁12によって流路44の連通・遮断状態が制御される。
【0050】
また、液圧室5bと前輪FLに対応するホイールシリンダ3FLを接続するべく、流路42に接続される流路45が備えられている。この流路45には、第2常開制御弁14が備えられている。第2常開制御弁14は、非通電時には連通状態、通電時には遮断状態となる二位置弁であり、この第2常開制御弁14によって流路45の連通・遮断状態が制御される。
【0051】
また、マスタリザーバ7から延設された流路43に接続される流路46が設けられている。この流路46は、流路46a,46b,46c,46dに分岐している。そして、流路46aがホイールシリンダ3FRに、流路46bがホイールシリンダ3RLにそれぞれ接続されている。また、流路46cがホイールシリンダ3RRに、流路46dがホイールシリンダ3FLにそれぞれ接続されている。
【0052】
各流路46a〜46dには、それぞれ1つずつポンプ19a,19b,19c,19dが備えられている。ポンプ19a〜19dのうち、ポンプ19a,19bは、モータ23aによって駆動され、ポンプ19c,19dは、モータ23bによって駆動される。
【0053】
また、ポンプ19a〜19dのそれぞれには、並列的に循環流路47a,47b,47c,47dが備えられている。循流路47a〜47dは、ポンプ19a〜19dから吐出されるブレーキ液の一部をポンプ19a〜19dに循環させる。
【0054】
循環流路47aには、直列的に接続された第1常閉制御弁17と調圧弁8aが備えられる。第1常閉制御弁17がポンプ19aの吸入ポート側(上流側)に調圧弁8aが吐出ポート側(下流側)に位置するように配置されている。また、循環流路47bには、調圧弁8bが備えられている。
【0055】
循環流路47cには、調圧弁8cが備えられている。また、循環流路47dには、直列的に接続された第2常閉制御弁18と調圧弁8dが備えられる。第2常閉制御弁18がポンプ19dの吸入ポート側(上流側)に調圧弁8cが吐出ポート側(下流側)に位置するように配置されている。
上述の調圧弁8a〜8dは、上述の第1実施形態と同様に、印加される電流に応じてその開度を変化させ、流通する液の流量を制御する。
【0056】
流路46a〜46dそれぞれの各ポンプ19a〜19dと各ホイールシリンダ3FR〜3RRの間にホイールシリンダ液圧センサ28a,28b,28c,28dが設けられる。これにより、各ホイールシリンダ液圧が検出できるように構成されている。また、流路44の第1常開制御弁12よりも上流側にマスタシリンダ液圧センサ27aが、流路45の第2常開制御弁14よりも上流側にマスタシリンダ液圧センサ27bが、それぞれ設けられている。これにより、マスタシリンダ液圧を検出できるように構成されている。
【0057】
図6に示すように、制御手段24には、回転速度センサ25、ブレーキ操作量センサ50、ホイールシリンダ液圧センサ28などの検出信号が入力されるように構成している。
制御手段24は、回転速度センサ25、ホイールシリンダ液圧センサ28、ブレーキ操作量センサ50などの検出信号に基づいて、調圧弁8、第1常開制御弁12、第2常開制御弁14、第1常閉制御弁17、第2常閉制御弁18、モータ23の夫々の作動を制御することにより、各ホイールシリンダ3に付与するホイールシリンダ液圧を制御するように構成してある。
【0058】
続いて、上記のように構成される制動制御装置の作動について、通常ブレーキ時と車両用ブレーキ制御装置に異常が発生した異常時の場合とに分けて説明する。
【0059】
(1)通常ブレーキ時の動作
通常ブレーキ時においては、第1、第2常開制御弁12,14への通電は共にONされ、第1、第2常閉制御弁17,18への通電も共にONされる。これにより、第1、第2常開制御弁12,14は共に遮断状態、第1、第2常閉制御弁17,18は共に連通状態とされる。
【0060】
また、調圧弁8a〜8dは、印加電流Iを制御することにより、ポンプの上下流間に発生させる差圧Pdが制御される。ストローク制御弁51は、通電がONされる。このため、ストロークシミュレータ52が液圧室5bと連通状態となり、ブレーキペダル6が踏み込まれたときに、液圧室5b内のブレーキ液がストロークシミュレータ52に移動することになる。したがって、ドライバがブレーキペダル6を踏み込んだときに踏み込みに応じた反力を得つつ、ブレーキペダル6が踏み込めるようになっている。
【0061】
制御手段24は、ブレーキペダル6のブレーキ操作量に応じて、液圧ポンプ19a〜19dの回転速度を制御するとともに、調圧弁8a〜8dの開度を調節する。具体的には、液圧ポンプ19aから供給されたブレーキ液は、調圧弁8aの開度に応じてホイールシリンダ3FRに供給されるものと、調圧弁8aを流通して循環するものとに分けられる。このようなブレーキ液の振り分けにより、調圧弁8aのホイールシリンダ3に接続する上流側と、下流側との液圧の差圧Pdを調節する。本実施形態では、この差圧Pdがホイールシリンダ液圧Pwとなる。調圧弁8b〜8dについても同様に差圧Pdを調整する。
【0062】
この実施形態においても、上述の第1実施形態と同様に、循環流量Qrが小さくなるほど、相関関係を示す線が、印加電流Iが大きくなる側にシフトする(図3を参照)。制御手段24により、循環流量Qrに基づくこれら相関関係の選択、および、当該選択した関係に基づく印加電流Iと差圧Pdとの制御を行う。
【0063】
次に、図6及び図7に基づいて、調圧弁8の制御の処理の流れについて説明する。なお、この処理は全ての調圧弁8に共通するものであり、算用数字の後の「a」、「b」、「c」、「d」を省略して説明する。
制御手段24は、ホイールシリンダ液圧センサ28が検出したホイールシリンダ液圧Pw及びブレーキ操作量センサ50が検出した操作量Sを取得する。制御手段24は、取得した操作量Sに基づいて、制御する調圧弁8の差圧Pdの値を決定する。(♯01)。
【0064】
制御手段24は、ホイールシリンダ液圧センサ28から取得したホイールシリンダ液圧Pwに基づいて、ホイールシリンダ3に流入する液の流量Qwを演算する。(♯02)。
【0065】
演算手段24は、ホイールシリンダ液圧センサ28が検出したホイールシリンダ液圧Pw、ブレーキ操作量センサ50が検出した操作量S、および、ホイールシリンダ液圧Pwの制御値などに基づいて、モータ23の回転速度の制御値を演算する。制御手段24は、モータ23が制御値で回転するように、モータ23に対して制御信号を出力する(♯03)。また、制御手段24は、回転速度センサ25から実際のモータの回転速度を取得する(♯04)。
【0066】
決定されたモータ23の回転速度の制御値がゼロでない場合、すなわちモータ23を停止しない場合(♯05のYes分岐)、制御手段24は以下に説明するように、調圧弁8を流通する液の循環流量Qrを演算する。つまり、制御手段24は、回転速度センサ25から取得した回転速度に基づいて、液圧ポンプ19の吐出流量Qpを演算する(♯06)。また、制御手段24は、演算した流量Qw及び液圧ポンプ19の吐出流量Qpに基づいて、調圧弁8を流通する循環流量Qrを演算する。つまり、液圧ポンプ19から吐出された液のうちの一部又は全部が、調圧弁8を介して循環するとともに、残りの液がホイールシリンダ3に流入することになる。したがって、液圧ポンプ19の吐出流量Qpから流量Qwを差し引くことにより、循環流量Qrが演算できる(♯07)。
【0067】
制御手段24は、演算した循環流量Qrに基づいて、循環流量Qr毎に異なる印加電流Iと差圧Pdとの相関関係(図3を参照)の中から循環流量Qrに応じた一つの相関関係を決定する。制御手段24は、決定された相関関係により、演算された差圧Pdに対応した印加電流Iを決定し、決定された印加電流Iを調圧弁8に対して印加する(♯08)。
【0068】
一方、決定されたモータ23の回転速度の制御値がゼロである場合、すなわちモータ23を停止する場合(♯05のNo分岐)、モータ回転数がゼロの場合の印加電流Iと差圧Pdとの相関関係(図3のQr=0を参照)に基づいて調圧弁8に対して印加する電流が決定される。
【0069】
(2)異常時のブレーキ動作
異常時には、制御部24から制御信号が出力できなくなるか、もしくは、各種弁やモータ23a,23bが正常に駆動されない可能性がある。従って、各種弁やモータ23a,23bに対する通電がOFFにされる。
【0070】
つまり、第1、第2常開制御弁12,14への通電が共にOFFとなるため、これらは共に連通状態となる。第1、第2常閉制御弁17,18への通電も共にOFFとなるため、これらは共に遮断状態とされる。
【0071】
また、調圧弁8a〜8dについても、通電がOFFとなるため、連通状態となる。ストローク制御弁51も通電がOFFとなるため、ストロークシミュレータ52と液圧室5bとの間が遮断状態となる。
さらに、モータ23a,23bへの通電が共にOFFとなり、ポンプ19a〜19dによるブレーキ液の吸入・吐出も停止される。
【0072】
このような状態において、液圧室5aは、流路41,44,46aを介してホイールシリンダ3FRと連通した状態となる。また、液圧室5bは、流路42,45,46dを通じてホイールシリンダ3FLと連通した状態となる。
【0073】
このため、ブレーキペダル6が踏み込まれ、加えられた踏力に応じて液圧室5aおよび液圧室5bにマスタシリンダ液圧が発生すると、このマスタシリンダ液圧がホイールシリンダ液圧としてホイールシリンダ3FL、3FRに伝えられる。これにより、両前輪FL、FRに対して制動力が発生する。
【0074】
[別実施形態]
(1)上述の実施形態において、ホイールシリンダ液圧センサ28は必ずしも備える必要はない。この場合、ブレーキ操作が行われた後、マスタシリンダ液圧とホイールシリンダ液圧とが安定した定常状態となった後に循環流量Qrが演算される。つまり、定常状態においては、液圧ポンプ19から吐出された液が全て調圧弁8を流通して循環することになる。このため、液圧ポンプ19からの吐出流量Qpと循環流量Qrとが等しくなる。従って、モータ23の回転速度に基づいて吐出流量Qpを演算することにより、循環流量Qrを演算することができる。
【0075】
(2)上記実施形態では、モータ23の回転速度をゼロにする際には、循環流量Qrがゼロの場合として予め設定した相関関係に基づいて、印加電流Iと差圧Pdとを制御する例を示した。しかし、ポンプ19の流量がゼロの場合として、次のように設定することもできる。
即ち、図3に示したごとく、四本の実線の他に、さらに印加電流Iの大きい側に破線で示す補正線を設定する。液圧ポンプ19が停止した状態で、仮に調圧弁8の遮断程度が緩いと、ブレーキ液は調圧弁8でリークする。その場合、Pd(1)を維持することができず、また、液圧ポンプ19が停止しているため差圧Pdを再びPd(1)に戻すこともできない。このような事態を防止するためには、調圧弁8の閉状態を確実に維持する必要がある。そこで、モータ23を停止する場合には、通常、調圧弁8が完全に閉状態となる位置よりもさらに閉じ側に制御する。つまり、制御手段24により、図3の右端の実線に対して印加電流Iがαだけ多くなるように補正制御する。これにより、調圧弁8をより確実に遮断することができる。
また、必ずしも、モータ23の回転速度がゼロの場合にのみ印加電流Iを補正制御する必要はなく、循環流量Qrが漸減するに従って印加電流Iの補正量を漸増させるように構成しても良い。
【0076】
(3)上述の実施形態において、さらに、制御手段24が、ブレーキ液の温度(フルード温度)に基づいて、循環流量Qrを補正することとしてもと良い。
フルード温度は、種々の方法によって計測することができる。例えば液圧回路4のブレーキ液の流路に温度センサを設けて、フルード温度を直に検出することができる。また、液圧回路4の近傍に温度センサを設けて、ここからフルード温度を推算しても良い。さらに、調圧弁8の作動時間に基づいてフルード温度を推算しても良いし、エンジンシステムなど、液圧回路4以外のシステムで検出又は推定された温度に基づいてフルード温度を推算しても良い。
循環流量Qrは、フルード温度の変化に伴う体積や粘度の変化によって変化する。したがって、上述のごとく検出又は推算したフルード温度に基づいて循環流量Qrを補正することにより、正確に循環流量Qrを演算することができる。
【0077】
(4)上述の実施形態において、差圧Pdと印加電流Iの相関関係として、直線の相関関係を示したが、相関関係は直線に限られるものではなく、例えば曲線など、調圧弁8の特性に応じて適宜設定することができる。
【0078】
(5)上述の実施形態では、調圧弁8を流通する液の循環流量Qrに基づき、目標となる差圧Pdが得られるよう印加電流Iを演算する一例として、循環流量Qr毎に異なる印加電流Iと差圧Pdとの相関関係を備えた例について説明したが、これに限られるものではない。例えば、循環流量Qr、印加電流I、及び差圧Pdの関係を示したマップを備え、循環流量Qrと目標とする差圧Pdとに基づき、このマップから印加電流Iを決定しても良い。
【0079】
本発明は、ブレーキ操作力に基づいてマスタシリンダ液圧を発生させるマスタシリンダと、前記マスタシリンダ液圧に基づいて各車輪にホイールシリンダ液圧を発生させる液圧回路と、前記マスタシリンダ液圧に加圧するアシスト液圧を発生させるモータの回転により駆動するポンプとを備えた制動制御装置であれば、四輪自動車用に限らず、二輪車、鉄道、自走式のクレーン等様々な装置に適用可能である。
【産業上の利用可能性】
【0080】
本発明は、自動車その他の車両のブレーキに利用可能である。
【符号の説明】
【0081】
2 マスタシリンダ
4 液圧回路
6 ブレーキ
8 調圧弁
19 ポンプ
24 制御手段
25 回転速度センサ
27 マスタシリンダ液圧センサ
28 ホイールシリンダ液圧センサ
Pd 差圧
Pm マスタシリンダ液圧
Pw ホイールシリンダ液圧
Qp 吐出流量
Qr 循環流量
【特許請求の範囲】
【請求項1】
ドライバによって操作されるブレーキ操作部材と、
各車輪に配設されたホイールシリンダに対してホイールシリンダ液圧を供給する液圧回路と、
モータの回転により駆動し前記ホイールシリンダ液圧が前記ブレーキ操作部材の操作に応じた値となるよう前記液圧回路に液圧を発生させるポンプと、
前記ポンプから吐出されるブレーキ液の一部を前記ポンプに循環させるべく前記液圧回路の一部を共有する状態に設けた循環流路とを備えると共に、
前記液圧回路の前記ホイールシリンダ側に接続する上流側と下流側との差圧を調節可能な調圧弁と、
前記調圧弁を流通するブレーキ液の循環流量に基づき、目標となる前記差圧が得られる電流値を演算して前記調圧弁への印加電流を制御する制御手段を備えた制動制御装置。
【請求項2】
前記ポンプから吐出されるブレーキ液のみで前記ホイールシリンダ液圧を発生可能に構成され、
前記ブレーキ操作部材の操作量を検出するブレーキ操作量検出手段を備え、前記ホイールシリンダ液圧が前記ブレーキ操作量検出手段の検出結果に応じた値となるよう前記ポンプが駆動される請求項1に記載の制動制御装置。
【請求項3】
ブレーキ操作部材の操作に基づいて前記液圧回路にマスタシリンダ液圧を発生させるマスタシリンダと、前記マスタシリンダ液圧を検出するマスタシリンダ液圧検出手段とを備え、
前記ホイールシリンダ液圧が前記マスタシリンダ液圧検出手段の検出結果に応じた値となるように、前記ポンプが前記マスタシリンダ液圧に対して加圧するアシスト液圧を発生させる請求項1に記載の制動制御装置。
【請求項4】
前記制御手段は、前記循環流量に基づき、前記循環流量毎に異なる前記印加電流と前記液圧との相関関係の中から一つの相関関係を決定し、当該決定した相関関係に基づいて前記調圧弁への印加電流を制御する請求項1〜3の何れか一項に記載の制動制御装置。
【請求項5】
前記モータの回転速度を検出する回転速度検出手段を備え、前記制御手段は、ブレーキ操作が行われた後、前記ホイールシリンダ液圧が安定した状態で、前記検出された回転速度に基づいて前記循環流量を演算する請求項1〜4の何れか一項に記載の制動制御装置。
【請求項6】
前記モータの回転速度を検出する回転速度検出手段を備えると共に、前記ホイールシリンダ液圧を検出するホイールシリンダ液圧検出手段を備え、前記制御手段は、前記検出された回転速度と前記ホイールシリンダ液圧の変化量とに基づいて前記循環流量を演算する請求項1〜4の何れか一項に記載の制動制御装置。
【請求項7】
前記ブレーキ液の温度に基づいて、前記制御手段は、前記循環流量を補正する請求項1〜6の何れか一項に記載の制動制御装置。
【請求項8】
前記制御手段は、前記モータが停止される場合、前記演算又は決定した相関関係に基づいた印加電流を、前記調圧弁が閉じる側に補正する請求項1〜7の何れか一項に記載の制動制御装置。
【請求項1】
ドライバによって操作されるブレーキ操作部材と、
各車輪に配設されたホイールシリンダに対してホイールシリンダ液圧を供給する液圧回路と、
モータの回転により駆動し前記ホイールシリンダ液圧が前記ブレーキ操作部材の操作に応じた値となるよう前記液圧回路に液圧を発生させるポンプと、
前記ポンプから吐出されるブレーキ液の一部を前記ポンプに循環させるべく前記液圧回路の一部を共有する状態に設けた循環流路とを備えると共に、
前記液圧回路の前記ホイールシリンダ側に接続する上流側と下流側との差圧を調節可能な調圧弁と、
前記調圧弁を流通するブレーキ液の循環流量に基づき、目標となる前記差圧が得られる電流値を演算して前記調圧弁への印加電流を制御する制御手段を備えた制動制御装置。
【請求項2】
前記ポンプから吐出されるブレーキ液のみで前記ホイールシリンダ液圧を発生可能に構成され、
前記ブレーキ操作部材の操作量を検出するブレーキ操作量検出手段を備え、前記ホイールシリンダ液圧が前記ブレーキ操作量検出手段の検出結果に応じた値となるよう前記ポンプが駆動される請求項1に記載の制動制御装置。
【請求項3】
ブレーキ操作部材の操作に基づいて前記液圧回路にマスタシリンダ液圧を発生させるマスタシリンダと、前記マスタシリンダ液圧を検出するマスタシリンダ液圧検出手段とを備え、
前記ホイールシリンダ液圧が前記マスタシリンダ液圧検出手段の検出結果に応じた値となるように、前記ポンプが前記マスタシリンダ液圧に対して加圧するアシスト液圧を発生させる請求項1に記載の制動制御装置。
【請求項4】
前記制御手段は、前記循環流量に基づき、前記循環流量毎に異なる前記印加電流と前記液圧との相関関係の中から一つの相関関係を決定し、当該決定した相関関係に基づいて前記調圧弁への印加電流を制御する請求項1〜3の何れか一項に記載の制動制御装置。
【請求項5】
前記モータの回転速度を検出する回転速度検出手段を備え、前記制御手段は、ブレーキ操作が行われた後、前記ホイールシリンダ液圧が安定した状態で、前記検出された回転速度に基づいて前記循環流量を演算する請求項1〜4の何れか一項に記載の制動制御装置。
【請求項6】
前記モータの回転速度を検出する回転速度検出手段を備えると共に、前記ホイールシリンダ液圧を検出するホイールシリンダ液圧検出手段を備え、前記制御手段は、前記検出された回転速度と前記ホイールシリンダ液圧の変化量とに基づいて前記循環流量を演算する請求項1〜4の何れか一項に記載の制動制御装置。
【請求項7】
前記ブレーキ液の温度に基づいて、前記制御手段は、前記循環流量を補正する請求項1〜6の何れか一項に記載の制動制御装置。
【請求項8】
前記制御手段は、前記モータが停止される場合、前記演算又は決定した相関関係に基づいた印加電流を、前記調圧弁が閉じる側に補正する請求項1〜7の何れか一項に記載の制動制御装置。
【図1】


【図2】

【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2009−262920(P2009−262920A)
【公開日】平成21年11月12日(2009.11.12)
【国際特許分類】
【出願番号】特願2009−20137(P2009−20137)
【出願日】平成21年1月30日(2009.1.30)
【出願人】(301065892)株式会社アドヴィックス (1,291)
【Fターム(参考)】
【公開日】平成21年11月12日(2009.11.12)
【国際特許分類】
【出願日】平成21年1月30日(2009.1.30)
【出願人】(301065892)株式会社アドヴィックス (1,291)
【Fターム(参考)】
[ Back to top ]