
制動力制御装置
【課題】路面推定の精度を向上させることが可能な制動力制御装置を提供する。
【解決手段】制動力制御装置12では、前後Gセンサ42が検出した車両10の前後加速度である前後G検出値に基づいて路面推定を行う路面推定手段110と、ホイールシリンダ62a〜62dにかかるブレーキ液圧を増圧、減圧又は保持させることで、車輪18のロックを防止するアンチロック制御手段112とを備える。路面推定手段110は、アンチロック制御中に前記ブレーキ液圧が増圧又は増圧保持となっている車輪18の数に応じて前記前後G検出値を補正した前後G補正値に基づいて路面推定を行う。
【解決手段】制動力制御装置12では、前後Gセンサ42が検出した車両10の前後加速度である前後G検出値に基づいて路面推定を行う路面推定手段110と、ホイールシリンダ62a〜62dにかかるブレーキ液圧を増圧、減圧又は保持させることで、車輪18のロックを防止するアンチロック制御手段112とを備える。路面推定手段110は、アンチロック制御中に前記ブレーキ液圧が増圧又は増圧保持となっている車輪18の数に応じて前記前後G検出値を補正した前後G補正値に基づいて路面推定を行う。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、車輪に対する制動力を制御する制動力制御装置に関する。より詳細には、車輪のロックを防止するアンチロックブレーキ機能を有する制動力制御装置に関する。
【背景技術】
【0002】
車輪に対する制動力を制御する制動力制御装置が知られている。制動力制御装置の中には、車輪のロックを防止するアンチロックブレーキシステム(ABS)に関するものや(特許文献1、2)、緊急時にブレーキ液圧を高める緊急ブレーキシステムに関するものがある(特許文献2)。
【0003】
特許文献1では、車体速度(VR0)と、所定の路面摩擦係数(μ)と、所定の定数(a)とに基づいて目標車輪速度(VWt)を算出する([0036]、[0037]、[0055])。そして、車輪速度が目標車輪速度になるように、各車輪のブレーキトルク(T)を制御する([0038]〜[0042]、[0056]〜[0060])。
【0004】
特許文献2では、運転者のブレーキ操作による制動力を増大させるブレーキアシスト制御と、自動的に制動力を発生させる自動ブレーキ制御とを用いる(要約、請求項1)。
【0005】
また、路面摩擦係数の推定については、所定の制動状態における車両の前後加速度(前後G)に基づいて行うものが存在する(特許文献3)。すなわち、特許文献3では、急制動時における前後Gセンサ5の検出値に基づいて、低μ、高μ又は中μのいずれであるかを推定する(特許文献3の図35、[0119])。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2009−274582号公報
【特許文献2】特開2008−307999号公報
【特許文献3】特開平11−005421号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
上記のように、特許文献3では、急制動時の前後Gを用いて路面状態(低μ、高μ又は中μ)を推定するが、特許文献3の方法では、推定精度に改善の余地がある。
【0008】
この発明はこのような課題を考慮してなされたものであり、路面推定の精度を向上させることが可能な制動力制御装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
この発明に係る制動力制御装置は、前後加速度センサが検出した車両の前後加速度である前後加速度検出値に基づいて路面推定を行う路面推定手段と、ホイールシリンダにかかるブレーキ液圧を増圧、減圧又は保持させることで、車輪のロックを防止するアンチロック制御手段とを備えるものであって、前記路面推定手段は、アンチロック制御中に前記ブレーキ液圧が増圧又は増圧後保持となっている車輪の数に応じて前記前後加速度検出値を補正した前後加速度補正値に基づいて前記路面推定を行うことを特徴とする。
【0010】
この発明によれば、アンチロック制御中にブレーキ液圧が増圧又は増圧後保持となっている車輪の数に応じて前後加速度検出値を補正した前後加速度補正値に基づいて路面推定を行う。従って、ブレーキ液圧の増圧に伴って前後加速度センサが車両のピッチング(すなわち、前後方向に対する車体の傾き変動)の影響を受けたとしても前後加速度センサの検出精度を向上させることが可能となる。その結果、路面推定の精度を向上させることが可能となる。
【0011】
全ての前記車輪が増圧又は増圧後保持となっているときに前記前後加速度検出値が減少している場合、減少前の前記前後加速度検出値を保持して前記前後加速度補正値としてもよい。これにより、前後加速度センサが車両のピッチング(ここでは、車体の後ろ側が路面に近づく傾き変動)の影響を受けた前後加速度検出値を出力している場合であっても、当該ピッチングの影響をキャンセルすることが可能となる。従って、路面推定の精度を向上することが可能となる。
【0012】
全ての前記車輪が増圧又は増圧後保持となった後、少なくとも1輪が減圧になったとき、前記前後加速度検出値を減少方向に補正して前記前後加速度補正値としてもよい。
【0013】
これにより、全ての車輪が増圧又は増圧後保持となっていた状態から少なくとも1輪が減圧になったにもかかわらず、車両のピッチング(ここでは、車体の前側が路面に近づく傾き変動)により前後加速度検出値が減少しない場合であっても、同検出値を減少させることができる。従って、路面推定の精度を向上することが可能となる。
【0014】
また、同軸に配置された複数の車輪(例えば、左前輪と右前輪)をそれぞれ独立してアンチロック制御を行う独立制御を、路面摩擦係数が高い場合にのみ行う構成では、前後加速度検出値が実際の前後加速度よりも高い値となっても、当該検出値を減少方向に補正することにより、誤って独立制御を行うことを防止することが可能となる。従って、不適切な独立制御による車両挙動の乱れを防止することができる。
【0015】
全ての前記車輪が増圧又は増圧後保持となった後、少なくとも1輪が減圧となったとき、前記前後加速度検出値が減少している場合、前記前後加速度検出値の増加方向の補正を禁止してもよい。全ての車輪が増圧又は増圧後保持となった後、少なくとも1輪が減圧となったとき、車両の前後加速度(真値)は減少するはずであるが、車両のピッチング(ここでは、車体の前側が路面に近づく傾き変動)から、前後加速度検出値は増加する場合がある。上記構成によれば、前後加速度検出値の増加方向の補正を禁止するため、路面推定の精度を向上することが可能となる。
【0016】
前記制動力制御装置は、さらに、前記車両の減速操作を判定する減速操作判定手段を有し、前記減速操作が行われていないにもかかわらず、前記前後加速度検出値が増加した場合、前記前後加速度検出値の補正を禁止してもよい。これにより、例えば、車両が登り坂を走行することによって生じる前後加速度センサの出力値の減少を防止することが可能となる。
【0017】
この発明に係る制動力制御装置は、前後加速度センサが検出した車両の前後加速度である前後加速度検出値に基づいて路面摩擦係数又は路面状態を推定する路面推定手段と、ホイールシリンダにかかるブレーキ液圧を増圧、減圧又は保持させることで、車輪のロックを防止するアンチロック制御を実行するアンチロック制御手段とを備えるものであって、前記路面推定手段は、各ホイールシリンダにおける前記ブレーキ液圧の変化に応じて前記前後加速度検出値を補正して前後加速度補正値を演算し、前記前後加速度補正値に基づいて前記路面摩擦係数若しくは前記路面状態を推定する、若しくは前記前後加速度検出値に応じて算出した路面摩擦係数を、各ホイールシリンダにおける前記ブレーキ液圧の変化に応じて補正する、又は前記路面状態を判定するための前記前後加速度検出値若しくは前記路面摩擦係数の閾値を各ホイールシリンダにおける前記ブレーキ液圧の変化に応じて設定することを特徴とする。
【0018】
この発明によれば、各ホイールシリンダにおけるブレーキ液圧の変化に応じて前後加速度検出値(前後G検出値)を補正して算出した前後G補正値に基づいて路面摩擦係数又は路面状態を推定する。或いは、前後G検出値に応じて算出した路面摩擦係数を、各ホイールシリンダにおける前記ブレーキ液圧の変化に応じて補正する。或いは、路面状態を判定するための前後加速度検出値又は路面摩擦係数の閾値を各ホイールシリンダにおけるブレーキ液圧の変化に応じて設定する。
【0019】
これらにより、例えば、各ホイールシリンダのブレーキ液圧が増圧しているにもかかわらず、車両のピッチング(ここでは、車体の後ろ側が路面に近づく傾き変動)の影響で前後G検出値が減少した場合、当該ピッチングの影響をキャンセルすることが可能となる。
【0020】
或いは、全てのホイールシリンダでブレーキ液圧が増圧した後、一部のホイールシリンダでブレーキ液圧が減圧したにもかかわらず、車両のピッチング(ここでは、車体の前側が路面に近づく傾き変動)の影響で前後G検出値が増加した場合、当該ピッチングの影響をキャンセルすることが可能となる。
【0021】
このため、前後G検出値が、車両のピッチングの影響による誤差を含んだとしても、当該誤差をキャンセルすることが可能となる。従って、前後Gの検出精度及び路面推定の精度を向上することが可能となる。
【発明の効果】
【0022】
この発明によれば、アンチロック制御中にブレーキ液圧が増圧又は増圧後保持となっている車輪の数に応じて前後加速度検出値を補正した前後加速度補正値に基づいて路面推定を行う。従って、ブレーキ液圧の増圧に伴って前後加速度センサが車両のピッチングの影響を受けたとしても前後加速度センサの検出精度を向上させることが可能となる。その結果、路面推定の精度を向上させることが可能となる。
【図面の簡単な説明】
【0023】
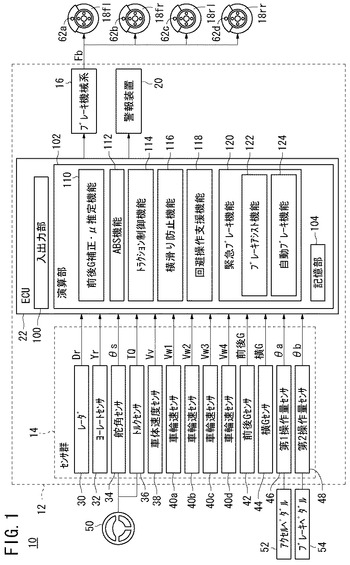
【図1】この発明の一実施形態に係る制動力制御装置を有する車両のブロック構成図である。
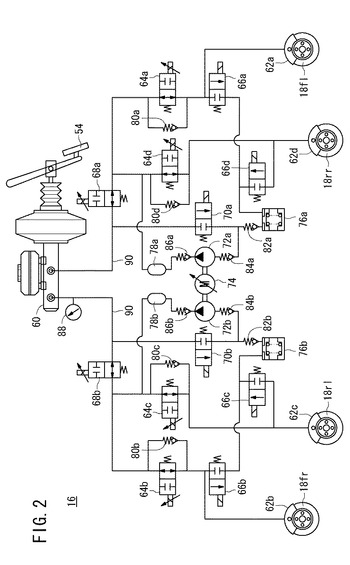
【図2】前記実施形態におけるブレーキ機械系の概略構成図である。
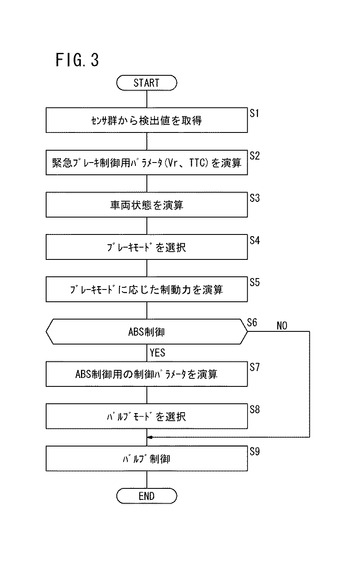
【図3】前記ブレーキ機械系を制御するフローチャートである。
【図4】前記実施形態におけるブレーキモードの選択に関する説明図である。
【図5】前記実施形態においてABS制御等に応じてINバルブ、OUTバルブ及びレギュレータバルブの開閉制御及びポンプのオンオフ制御を示す図である。
【図6】路面摩擦係数μの推定及び独立制御の実施の要否判定を行うフローチャートである。
【図7】前後G検出値を補正するフローチャートである。
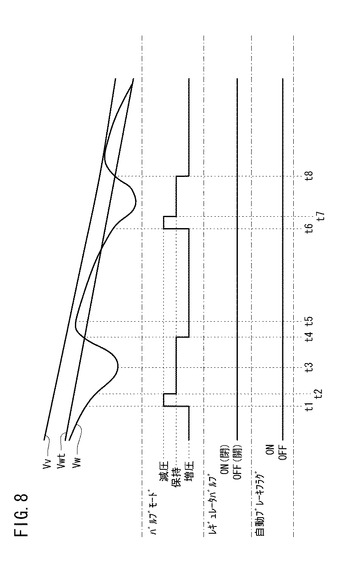
【図8】ABS制御のみを実行する場合の一例を示すタイムチャートである。
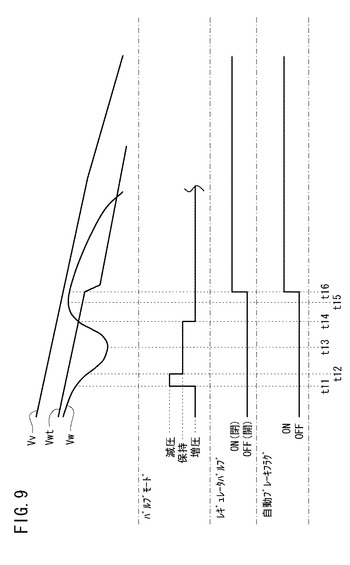
【図9】ブレーキアシスト制御及び自動ブレーキ制御を伴うABS制御を実行する場合の一例を示すタイムチャートである。
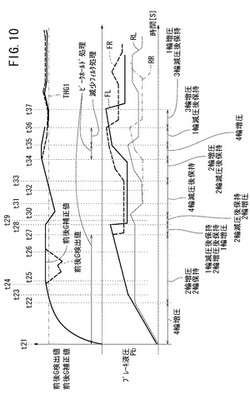
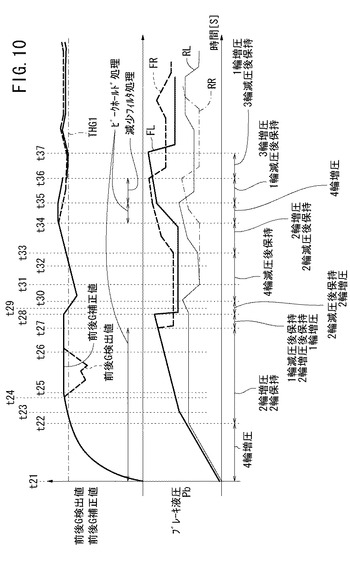
【図10】各車輪のブレーキ液圧と、前後G検出値及び前後G補正値との一例を示すタイムチャートである。
【発明を実施するための形態】
【0024】
A.一実施形態
1.車両10の構成
(1−1)全体構成
図1は、この発明の一実施形態に係る制動力制御装置12を有する車両10(以下「自車10」ともいう。)のブロック構成図である。制動力制御装置12は、各種の検出を行うセンサ群14と、車輪18fl、18fr、18rl、18rr(以下「車輪18」と総称する。)に対して制動力Fbを付与するブレーキ機械系16と、警報装置20と、センサ群14の検出値に基づいてブレーキ機械系16を制御する電子制御装置22(以下「ECU22」という。)とを有する。
【0025】
(1−2)センサ群14
図1に示すように、センサ群14には、レーダ30、ヨーレートセンサ32、舵角センサ34、トルクセンサ36、車体速度センサ38(車速センサ)、車輪速センサ40a〜40d、前後加速度センサ42(以下「前後Gセンサ42」という。)、横加速度センサ44(以下「横Gセンサ44」という。)、第1操作量センサ46及び第2操作量センサ48を含む。
【0026】
レーダ30は、図示しないフロントグリル部等に設けられ、車両10の前方に向けてミリ波等の電磁波を送信波として送信し、その反射波に基づいて障害物(例えば、先行車等)までの距離(相対距離Dr)[m]、自車10からの方向及び当該障害物の大きさを検出し、ECU22に送信する。レーダ30の代わりに、例えば、画像センサを用いてもよい。ヨーレートセンサ32は、車両10に発生しているヨーレートYrを検出する。舵角センサ34は、操向ハンドル50(ステアリングホイール)の舵角θsを検出する。トルクセンサ36は、操向ハンドル50にかかるトルクTQを検出する。
【0027】
車体速度センサ38は、トランスミッションのカウンタシャフトの回転を検出する第1ホール素子(いずれも図示せず)と、当該第1ホール素子の出力に基づいて車体速度Vv[km/h]を演算する第1演算部(図示せず)とを備える。第1演算部は、ECU22に設けてもよい。
【0028】
車輪速センサ40a〜40dは、各車輪18の回転を検出する第2ホール素子(図示せず)と、当該第2ホール素子の出力に基づいて各車輪18fl、18fr、18rl、18rrの車輪速度Vw1、Vw2、Vw3、Vw4(以下「車輪速度Vw」と総称する。)[km/h]を演算する第2演算部(図示せず)とを備える。第2演算部は、ECU22に設けてもよい。
【0029】
前後Gセンサ42は、車両10に発生している前後加速度(前後G)を検出する。横Gセンサ44は、車両10に発生している横加速度(横G)を検出する。第1操作量センサ46は、アクセルペダル52の操作量θaを検出する。第2操作量センサ48は、ブレーキペダル54の操作量θbを検出する。
【0030】
(1−3)ブレーキ機械系16
図2には、ブレーキ機械系16の概略構成図が示されている。図2に示すように、ブレーキ機械系16は、マスタシリンダ60、ホイールシリンダ62a〜62d、INバルブ64a〜64d、OUTバルブ66a〜66d、レギュレータバルブ68a、68b、サクションバルブ70a、70b、ポンプ72a、72b、ポンプモータ74、リザーバ76a、76b、ダンパ室78a、78b、チェック弁80a〜80d、82a、82b、84a、84b、86a、86b及び圧力計88を有する。
【0031】
INバルブ64a〜64d及びレギュレータバルブ68a、68bはノーマルオープン型の電磁弁であり、OUTバルブ66a〜66d及びサクションバルブ70a、70bはノーマルクローズ型の電磁弁である。各バルブ64a〜64d、66a〜66d、68a、68b、70a、70bは、ECU22からの指令に基づき開閉する(詳細は図5等を参照して後述する。)。圧力計88は、配管90における圧力Piを検出する。
【0032】
(1−4)警報装置20
警報装置20は、図示しないスピーカを備え、ECU22からの指令の下、運転者に対する警告音を発する。
【0033】
(1−5)ECU22
図1に示すように、ECU22は、ハードウェアとして、入出力部100、演算部102及び記憶部104を有する。本実施形態の演算部102は、記憶部104に記憶されているプログラムに基づきブレーキ機械系16を制御することにより、前後G補正・μ推定機能110、制動力制御装置機能112(以下「ABS機能112」という。)、トラクション制御機能114、横滑り防止機能116、回避操作支援機能118及び緊急ブレーキ機能120を実現する。
【0034】
前後G補正・μ推定機能110は、前後Gセンサ42が検出した前後G(以下「前後G検出値」という。)を補正して前後G補正値を算出すると共に、当該前後G補正値を用いて路面摩擦係数μを推定する(詳細は図6等を参照して後述する。)。
【0035】
ABS機能112は、ブレーキ機械系16から車輪18に対して制動力Fbが加えられている際(ブレーキ操作時)に車輪18のロックを防止する機能である。トラクション制御機能114は、駆動輪である車輪18のうち非ブレーキ操作時に過剰スリップ状態に陥りそうな駆動輪に対応したホイールシリンダ62a〜62dのブレーキ液圧Pbを制御する機能である。トラクション制御機能114は、例えば、加速時等の車輪18の空転を防ぐために用いられる。横滑り防止機能116は、車両10がカーブ等を旋回する際の横滑りを防止する機能である。
【0036】
回避操作支援機能118は、運転者が自車10を障害物から回避させるために操向ハンドル50を操作する際、当該操作を補助する機能である。ここにいう補助とは、図示しない補助モータを用いて回避方向への操舵をアシストする機能や、操舵を行うべきではない操舵方向への操舵に前記補助モータを用いて抵抗を付与する機能を含む。
【0037】
緊急ブレーキ機能120は、さらに、ブレーキアシスト機能122と、自動ブレーキ機能124とを含む。ブレーキアシスト機能122は、運転者によるブレーキペダル54の操作によって発生したブレーキ液圧Pbを通常よりも大きくする機能である。自動ブレーキ機能124は、各ホイールシリンダ62a〜62dにおけるブレーキ液圧Pbを自動的に(運転者によるブレーキペダル54の操作なしに)増加させる機能である。ブレーキアシスト機能122及び自動ブレーキ機能124におけるブレーキ液圧Pbを増加させる手法としては、例えば、ポンプ72a、72bを用いたものや、マスタシリンダ60の液圧を増加させるアキュームレータやモータを用いたものを挙げることができる。
【0038】
2.ブレーキ機械系16の制御
(2−1)ブレーキ機械系16の制御の流れ
図3には、ブレーキ機械系16を制御するフローチャートが示されている。ステップS1において、ECU22は、センサ群14から検出値を取得する。この際、センサ群14における各種センサの値は、ECU22においてそのまま用いることができるものと、演算部102での演算処理により具体的な数値を演算する必要があるものとが存在する。このため、ステップS1では、後者については、検出値を取得するのみならず、演算処理を実行し、より具体的な数値を得る。
【0039】
ステップS2において、ECU22は、ステップS1で取得した検出値に基づいて、緊急ブレーキ制御(緊急ブレーキ機能120)用の制御パラメータを演算する。本実施形態における当該制御パラメータは、相対速度Vr及び接触余裕時間(TTC:Time To Collision)である。
【0040】
ECU22は、レーダ30からの相対距離Drに基づいて自車10と障害物との相対速度Vr[km/h]を演算する。相対速度Vrは、以下の式(1)に基づいて算出される。
Vr(x)={Dr(x)−Dr(x−1)}/Tc ・・・(1)
【0041】
上記式(1)において、Tcは演算周期[s](固定値)を示し、xは、今回の演算周期Tcにおける値を示し、x−1は、前回の演算周期Tcにおける値を示す。
【0042】
次いで、ECU22は、以下の式(2)を用いてTTCを求める。
TTC(x)=Dr(x)/Vr(x) ・・・(2)
【0043】
図3のステップS3において、ECU22は、車両状態を演算する。ここでの車両状態としては、ブレーキ機械系16から車輪18に対して制動力Fbを付与している制動状態と、車両10が加速している加速状態と、運転者が操向ハンドル50を操作して舵角θsが変化している操舵状態と、上記いずれの状態でもない通常状態とが含まれる。従って、ECU22は、車両状態が、制動状態、加速状態、操舵状態又は通常状態のいずれであるかを演算する。当該演算には、ステップS1で取得した検出値を用いる。
【0044】
ステップS4において、ECU22は、緊急ブレーキ機能120のモード(ブレーキモード)を選択する。ブレーキモードとしては、通常モード、警報モード、ブレーキアシストモード、第1自動ブレーキモード及び第2自動ブレーキモードが含まれる。
【0045】
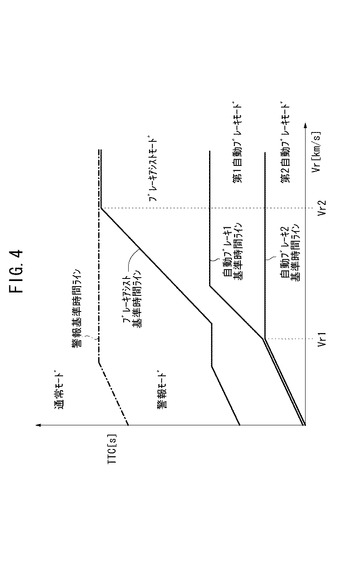
図4には、ブレーキモードの選択に関する説明図が示されている。図4からわかるように、本実施形態では、相対速度Vr及びTTCに基づいてブレーキモードを設定する。すなわち、自車10が障害物に接近することで、相対速度VrとTTCの組合せが警報基準時間ラインを下回ると、ECU22は、通常モードから警報モードに切り替える。そして、ECU22は、警報装置20を介して運転者に警報を発する。警報は、1回のみの出力、断続的な出力又は連続的な出力のいずれでもよい。
【0046】
自車10がさらに障害物に接近することで、相対速度VrとTTCの組合せがブレーキアシスト基準時間ラインを下回ると、ECU22は、ブレーキアシストモードを選択する。そして、ブレーキアシストモードが選択されている状態で運転者がブレーキペダル54を操作すると、ECU22は、ブレーキペダル54の操作量θbに応じてブレーキ機械系16を制御してブレーキ液圧Pbを増大させる。なお、相対速度Vrが所定値Vr2(図4)以上である場合、警報基準時間ラインとブレーキアシスト基準時間ラインは一致し、警報モードとブレーキアシストモードとが同時に選択される。
【0047】
自車10がさらに障害物に接近することで、相対速度VrとTTCの組合せが自動ブレーキ1基準時間ラインを下回ると、ECU22は、第1自動ブレーキモードを選択する。そして、第1自動ブレーキモードが選択されている間、ECU22は、ブレーキペダル54の操作量θbから独立してブレーキ機械系16を制御してブレーキ液圧Pbを増大させる。
【0048】
自車10がさらに障害物に接近することで、相対速度VrとTTCの組合せが自動ブレーキ2基準時間ラインを下回ると、ECU22は、第2自動ブレーキモードを選択する。そして、第2自動ブレーキモードが選択されている間、ECU22は、ブレーキペダル54の操作量θbから独立してブレーキ機械系16を制御してブレーキ液圧Pbを増大させる。ここでの増大の度合いは、第1自動ブレーキモードの場合よりも大きくなる。
【0049】
なお、相対速度Vrが所定値Vr1(図4)以下である場合、自動ブレーキ1基準時間ラインと自動ブレーキ2基準時間ラインは一致し、第2自動ブレーキモードが優先して選択される。なお、以下では、第1自動ブレーキモード(第1自動ブレーキ制御)と第2自動ブレーキモード(第2自動ブレーキ制御)を合わせて「自動ブレーキモード(自動ブレーキ制御)」と総称する。また、第1自動ブレーキ制御によるブレーキと第2自動ブレーキ制御によるブレーキを合わせて「自動ブレーキ」と総称する。
【0050】
相対速度VrとTTCの組合せが、警報基準時間ラインを上回る場合、上記各モード(警報モード、ブレーキアシストモード、第1自動ブレーキモード及び第2自動ブレーキモード)のいずれも選択されず、通常モードが選択される。通常モードでは、通常のブレーキ液圧Pbが発生される。
【0051】
また、図4に伴う処理の更なる詳細については、特許文献2に記載のものを用いることができる(例えば、特許文献2の図4、段落[0031]〜[0045]参照)。
【0052】
図3に戻り、ステップS5において、ECU22は、ステップS4で選択したブレーキモードに応じてブレーキ機械系16による制動力Fbを演算する。例えば、通常モード又は警報モードが選択されている場合、ECU22は、ブレーキ機械系16による付加的な制動力Fbは発生させず、ブレーキペダル54の操作に応じた通常のブレーキ液圧Pbが発生するようにブレーキ機械系16による制動力Fbを制御する。
【0053】
また、ブレーキアシストモードが選択されている場合、ECU22は、ブレーキペダル54の操作に伴って発生する通常のブレーキ液圧Pbに加える付加的なブレーキ液圧Pb(付加的な制動力Fb)を、ブレーキペダル54の操作量θb又は踏力に応じて演算する。
【0054】
さらに、第1自動ブレーキモードが選択されている場合、ECU22は、ブレーキペダル54の操作にかかわらずブレーキ機械系16により発生させる付加的な制動力Fbを演算する。同様に、第2自動ブレーキモードが選択されている場合、ECU22は、ブレーキペダル54の操作にかかわらずブレーキ機械系16により発生させる付加的な制動力Fbを演算する。上記のように、相対速度Vr及びTTCが等しい場合、第2自動ブレーキモードにおける付加的な制動力Fbは、第1自動ブレーキモードにおける付加的な制動力Fbよりも大きくなる。
【0055】
ステップS6において、ECU22は、ABS制御(ABS機能112)を実行するか否かを判定する。本実施形態では、ブレーキペダル54が踏まれると(操作量θbがゼロより大きいとき)、ECU22は、ABS制御を実行すると判定する。
【0056】
ABS制御を実行しない場合(S6:NO)、ステップS9に進む。ABS制御を実行する場合(S6:YES)、ステップS7において、ECU22は、ABS制御で用いる制御パラメータを演算する。本実施形態における当該パラメータは、路面摩擦係数μ、目標スリップ率St及び目標車輪速度Vwtである。
【0057】
路面摩擦係数μは、前後Gセンサ42が検出した前後G(前後G検出値)に基づいて算出される。すなわち、特許文献3の図35及び[0119]にも示されているように、ブレーキの作動状態(例えば、急制動状態)と前後Gに応じて路面摩擦係数μを推定することが可能である。なお、ブレーキの作動状態は、例えば、ブレーキ液圧Pb、ブレーキペダル54の操作量θb若しくは踏力などにより判定可能である。また、本実施形態では、路面摩擦係数μの推定に用いる前後Gは、ブレーキ液圧Pbの変化に応じて前後G検出値を補正した前後G補正値である(詳細は図6等を参照して後述する。)。
【0058】
さらに、本実施形態では、独立制御の要否を判定するため、路面摩擦係数μが低い状態(以下、この状態を「低μ」という。)と、路面摩擦係数μが高い状態(以下、この状態を「高μ」という。)を判定し、高μの場合、独立制御を実行し、低μの場合、独立制御を実行しない。独立制御は、同軸に配置された複数の車輪18(例えば、左前輪18flと右前輪18fr)それぞれに対して独立してアンチロック制御を行う制御である。
【0059】
目標スリップ率Stは、車輪18のスリップ率Sの目標値である。スリップ率Sは、車体速度Vvと車輪速度Vwの差を車体速度Vvで除したものである{S=(Vv−Vw)/Vv}。本実施形態において、目標スリップ率Stは固定値とされる。代わりに、車両10が走行している路面の種類(アスファルト、砂利道等)、路面状態(ドライ、ウェット等)、車体速度Vv等により可変とすることもできる。なお、前記路面の種類は、例えば、ナビゲーション装置(ナビゲーション装置の機能を有する携帯情報端末を含む。)により取得することができる。前記路面状態は、例えば、前記路面摩擦係数μにより推定することができる。
【0060】
さらに、本実施形態では、ブレーキモードとしてブレーキアシストモード、第1自動ブレーキモード又は第2自動ブレーキモードが選択されており且つABS制御が実行されている場合、目標スリップ率Stを増加させる。ここでの目標スリップ率Stの増加度合いは、ブレーキアシストモードよりも第1自動ブレーキモードを大きくし、さらに、第1自動ブレーキモードよりも第2自動ブレーキモードを大きくする。
【0061】
図4からわかるように、本実施形態では、通常、ブレーキモードが、通常モード、警報モード、ブレーキアシストモード、第1自動ブレーキモード及び第2自動ブレーキモードの順に変化していく。ブレーキモードが第2自動ブレーキモードに向かうほど、前方の障害物との接触の可能性が高くなる一方、運転者の操作により舵角θsが変更される可能性は低くなるといえる。このため、ブレーキモードが第2自動ブレーキモードに向かうほど目標スリップ率Stを増加させることで、舵角θsの変更が低い状況で車両10の減速度を高めることが可能となる。
【0062】
目標車輪速度Vwtは、車体速度Vv及び目標スリップ率Stに応じて算出することができる。例えば、目標車輪速度Vwtが車体速度Vv以下となるように、目標車輪速度Vwtと車体速度Vvとの差を事前に設定しておき、当該差を用いて目標車輪速度Vwtを算出することができる。当該差は、目標スリップ率Stに応じて設定することができる。
【0063】
図3のステップS8において、ECU22はバルブモードを選択する。本実施形態のバルブモードには、増圧モード、減圧モード及び保持モードがある。増圧モードは、ホイールシリンダ62a〜62dにかかるブレーキ液圧Pbを増大させるモードである。減圧モードは、ホイールシリンダ62a〜62dにかかるブレーキ液圧Pbを減少させるモードである。保持モードは、ホイールシリンダ62a〜62dにかかるブレーキ液圧Pbを保持させるモードである。
【0064】
実際の車輪速度Vwと目標車輪速度Vwtとの差D1(=Vw−Vwt)が閾値THD1を下回ると、ECU22は、一時的に減圧モードを選択し、その後、車輪速度Vwが目標車輪速度Vwtと等しくなるまで保持モードを選択する。また、実際の車輪速度Vwが目標車輪速度Vwtを上回ると、ECU22は、増圧モードを選択し、その後、車輪速度Vwが目標車輪速度Vwtと等しくなるまで増圧モードを選択する。
【0065】
但し、本実施形態では、ブレーキモードとして第1自動ブレーキモード又は第2自動ブレーキモードが選択され、ABS制御が実行され且つ車体速度Vvが閾値THVv以下である場合、減圧モードの選択が禁止される。このため、ECU22は、減圧モード又は保持モードしか選択することができない。
【0066】
本実施形態において、閾値THVvには、車体を横移動させる可能性が低い速度が設定される。車体を横移動させる可能性が低い速度とは、例えば、横滑り防止機能116及び回避操作支援機能118の少なくとも一方を作動させるか否かを判定する速度閾値(例えば、30〜40km/hの中から選択された値)とすることができる。
【0067】
ステップS9において、ECU22は、ステップS8で選択したバルブモードに応じて(S6:YESの場合)又はステップS5で演算した制動力に応じて(S6:NOの場合)、各バルブを制御する。
【0068】
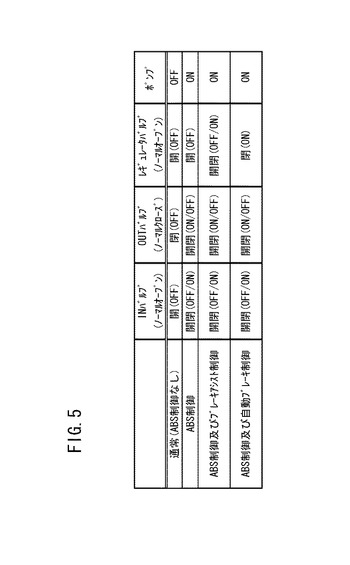
図5には、ABS制御等に応じてINバルブ64a〜64d、OUTバルブ66a〜66d、レギュレータバルブ68a、68bの開閉制御及びポンプ72a、72bのオンオフ制御を示す図である。図5に示すように、ABS制御を伴わない通常制御(パターン1)では、ノーマルオープン型のINバルブ64a〜64d及びレギュレータバルブ68a、68bはいずれも開(OFF)であり、ノーマルクローズ型のOUTバルブ66a〜66dは閉(OFF)である。また、ポンプ72a、72bはオフ(OFF)とする。
【0069】
ブレーキアシスト制御又は自動ブレーキ制御を伴わないABS制御(パターン2)では、レギュレータバルブ68a、68bは開(OFF)とされ、ポンプ72a、72bはオン(ON)にされた状態で、実際の車輪速度Vwと目標車輪速度Vwtとの関係に応じてINバルブ64a〜64d及びOUTバルブ66a〜66dが開閉(ON/OFF)される。すなわち、車輪速度Vwが目標車輪速度Vwtを上回っている場合、INバルブ64a〜64dが開に、OUTバルブ66a〜66dが閉とされる。車輪速度Vwと目標車輪速度Vwtの差D1が閾値THD1を下回っている場合、INバルブ64a〜64dが閉に、OUTバルブ66a〜66dが開とされる。車輪速度Vwが目標車輪速度Vwtと等しい場合、INバルブ64a〜64d及びOUTバルブ66a〜66dいずれも閉とされる。
【0070】
ブレーキアシスト制御を伴うABS制御(パターン3)では、レギュレータバルブ68a、68bは、マスタシリンダ60側とホイールシリンダ62a〜62d側との差圧に応じて開閉制御される。他にも、レギュレータバルブ68a、68bを比較的少ない駆動電流Irvにより少し閉じ、ポンプ72a、72bをオンにした状態で、パターン2と同様、実際の車輪速度Vwと目標車輪速度Vwtとの関係に応じてINバルブ64a〜64d及びOUTバルブ66a〜66dを開閉する制御であってもよい。これにより、ブレーキペダル54の操作に伴うブレーキ液圧Pbによる制動を基本としつつ、ブレーキアシスト制御によるブレーキ液圧Pbを発生させてブレーキペダル54の操作を補助することが可能となる。
【0071】
自動ブレーキ制御を伴うABS制御(パターン4)では、レギュレータバルブ68a、68bは閉じられる。他にも、レギュレータバルブ68a、68bを比較的大きな駆動電流Irvにより大きく閉じ、ポンプ72a、72bをオンにした状態で、パターン2、3と同様、実際の車輪速度Vwと目標車輪速度Vwtとの関係に応じてINバルブ64a〜64d及びOUTバルブ66a〜66dを開閉する制御であってもよい。従って、パターン3と比較して、パターン4では、ポンプ72a、72bからホイールシリンダ62a〜62dに付加されるブレーキ液圧Pbが大きくなり、より大きな制動力Fbを生じさせることができる。これにより、自動ブレーキ制御により発生させたブレーキ液圧Pbによる制動を行うことが可能となる。
【0072】
(2−2)路面摩擦係数μの推定及び独立制御の実施の要否判定
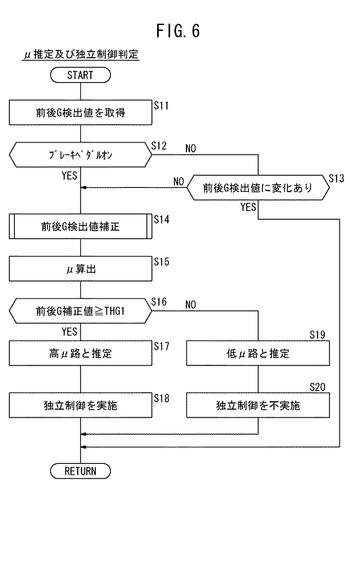
図6は、路面摩擦係数μの推定及び独立制御の実施の要否判定を行うフローチャートである。
【0073】
ステップS11において、ECU22(前後G補正・μ推定機能110)は、前後Gセンサ42から前後G検出値を取得する。ステップS12において、ECU22は、ブレーキペダル54が踏み込まれているか否か、すなわち、ブレーキペダル54がオンであるか否かを判定する。ブレーキペダル54がオンである場合(S12:YES)、ステップS14に進む。ブレーキペダル54がオンでない場合(S12:NO)、ステップS13に進む。なお、ステップS12に先行して図3のステップS6(ABS制御)でも同様の判定を行っている。このため、ステップS12を省略してステップS14に進むこともできる。
【0074】
ステップS13において、ECU22は、前後G検出値に変化があるか否かを判定する。当該判定は、例えば、今回の演算における前後G検出値又はその移動平均値と、前回の演算における前後G検出値又はその移動平均値との差を算出し、当該差が、前後G検出値の変化を判定するための閾値を超えるか否かにより行う。
【0075】
前後G検出値に変化がない場合(S13:NO)、ステップS14に進む。前後G検出値に変化がある場合(S13:YES)、路面摩擦係数μの推定を行わずに今回の処理を終了する。換言すると、減速操作が行われていないにもかかわらず、前後G検出値が変化した場合、前後G検出値の補正を禁止する。これにより、例えば、車両10が登り坂を走行することによって生じる前後G検出値の減少を防止することが可能となる。
【0076】
ステップS14において、ECU22は、前後G検出値の補正を行う。当該補正は、車両10のピッチング(すなわち、前後方向に対する車体の傾き変動)の影響をキャンセルするために行うものである(詳細は図10等を参照して後述する)。
【0077】
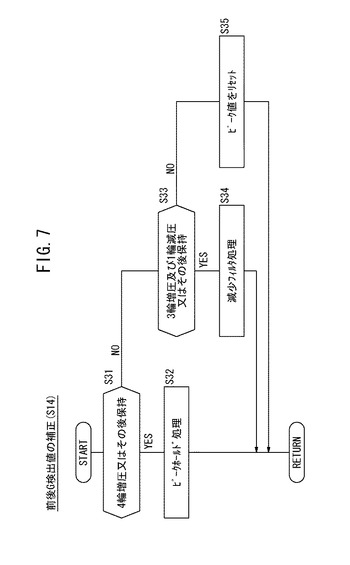
図7は、前後G検出値を補正するフローチャートである。ステップS31において、ECU22は、4輪、即ち、全ての車輪18が増圧モードであるか(4輪増圧であるか)、又は4輪増圧後、いずれかの車輪18が保持モードであるか(その後保持又は増圧後保持であるか)を判定する。
【0078】
4輪増圧又はその後保持である場合(S31:YES)、ステップS32において、ECU22は、ピークホールド処理を行う。具体的には、今回の前後G検出値が最大値(ピーク値)である場合、今回の前後G検出値を前後G補正値としてその後の処理で用いる。一方、今回の前後G検出値が最大値でない場合、前回までの前後G検出値の最大値を前後G補正値としてその後の処理で用いる。
【0079】
ステップS31において、4輪増圧及びその後保持でない場合(S31:NO)、ステップS33において、ECU22は、4つの車輪18のうち3輪が増圧モードであり且つ残りの1輪が減圧モードであるか(3輪増圧及び1輪減圧であるか)、又は3輪増圧及び1輪減圧の後、いずれかの車輪18が保持モードであるか(その後保持であるか)を判定する。
【0080】
3輪増圧及び1輪減圧又はその後保持である場合(S33:YES)、ステップS34において、ECU22は、減少フィルタ処理を行う。具体的には、今回の前後G検出値が前回の前後G検出値と比べて等しい、小さい又は大きい場合のいずれであっても、前回の前後G検出値から所定値を引いたものを前後G補正値としてその後の処理で用いる。
【0081】
これは、通常のブレーキングでは、4輪全てが増圧となった後、減圧になることを前提としている。すなわち、4輪全てが増圧となった後、少なくとも1輪が減圧となった場合、前後G(真値)は減少するはずである。そこで、車両10のピッチング(ここでは、車体の前側が路面に近づく傾き変動)により前後G検出値が増加した場合でも、減少フィルタ処理により前後G検出値を減少させることで、前後G検出値を前後Gの真値に近づけることが可能となる。
【0082】
なお、ここでの所定値は、4輪全てが増圧となった後、少なくとも1輪が減圧となった場合の実験値又は理論値を用いることができる。
【0083】
3輪増圧及び1輪減圧並びにその後保持でない場合(S33:NO)、ステップS35において、ECU22は、ステップS32で保持(ホールド)していたピーク値をリセットして今回の処理を終える。従って、前回の処理が4輪増圧及びその後保持でなかった場合、今回の処理では、前後G検出値をそのまま前後G補正値として用いる。なお、ピーク値のリセットは、4輪増圧及びその後保持の状態が終了した後であれば、別の条件(例えば、4輪増圧及びその後保持の終了時点)であってもよい。
【0084】
図6に戻り、ステップS15において、ECU22(前後G補正・μ推定機能110)は、前後G補正値に基づいて路面摩擦係数μを推定する。当該推定は、前後G補正値と路面摩擦係数μとの関係を事前にマップとして記憶部104に記憶しておき、前後G補正値に対応する路面摩擦係数μをマップから読み出すことにより行う。なお、例えば、減速操作の程度又はブレーキ液圧Pbの変化に応じて複数のマップを設けることもできる。
【0085】
ステップS16〜S20では、前後G補正値に基づいて路面状態の推定及び独立制御の実施要否の判定を行う。すなわち、ステップS16において、ECU22(前後G補正・μ推定機能110)は、前後G補正値が閾値THG1以上であるか否かを判定する。閾値THG1は、低μ路と高μ路とを判別するための閾値である。換言すると、閾値THG1は、独立制御を行うか否かを判定するための閾値である。前後G補正値が閾値THG1以上であるとき(S16:YES)、ステップS17において、ECU22(前後G補正・μ推定機能110)は、路面が高μ路であると判定する。続くステップS18において、ECU22(ABS機能112)は、独立制御を実行すると判定する。前後G補正値が閾値THG1以上でないとき(S16:NO)、ステップS19において、ECU22(前後G補正・μ推定機能110)は、路面が低μ路であると判定する。続くステップS20において、ECU22(ABS機能112)は、独立制御を実行しないと判定する。
【0086】
なお、ステップS17、S19の判定は、省略することもできる。また、前後G補正値と路面摩擦係数μとは対応関係にある。換言すると、所定の減速状態では、前後G補正値がわかれば、路面摩擦係数μを推定することができる。このため、前後G補正値を路面摩擦係数μに置き換えて路面状態の推定及び独立制御の実施の要否判定を行うこともできる。
【0087】
上記のように、独立制御は、同軸輪それぞれを独立してアンチロック制御を行う制御である。本実施形態では、左前輪18flと右前輪18frが同軸輪であり、左後輪18rlと右後輪18rrが同軸輪である。従って、独立制御を行っている場合、ECU22(ABS機能112)は、左前輪18flと右前輪18frのブレーキ液圧Pbの調整を独立して行うと共に、左後輪18rlと右後輪18rrのブレーキ液圧Pbの調整を独立して行う。また、独立制御を行っていない場合、ECU22(ABS機能112)は、左前輪18flと右前輪18frのブレーキ液圧Pbの調整を一致させると共に、左後輪18rlと右後輪18rrのブレーキ液圧Pbの調整を一致させる。
【0088】
(2−3)ブレーキ機械系16の制御の具体例
(a)ABS制御のみを実行する場合
図8は、ABS制御のみを実行する場合(上記パターン2)の一例を示すタイムチャートである。時点t1において、車輪速度Vwと目標車輪速度Vwtとの差D1(=Vw−Vwt)が閾値THD1を下回ると、ECU22は、ABS制御で用いるバルブモードとして、増圧モードから減圧モードに切り替える。そして、時点t2まで減圧モードを維持したのち、時点t2において減圧モードから保持モードに切り替える。時点t1から時点t2まで一時的に減圧モードを選択する際、ECU22は、INバルブ64a〜64dを閉(ON)とし、OUTバルブ66a〜66dを開(ON)とする。これにより、ホイールシリンダ62a〜62dにおけるブレーキ液圧Pbが減少する。但し、ブレーキ機械系16の特性上、ブレーキ液圧Pbの減少には若干の応答遅れが発生する。従って、図8では、時点t3まで車輪速度Vwと目標車輪速度Vwtとの差D1が増加し、その後、差D1が減少する。このため、ECU22は、このような応答遅れを考慮して減圧モードを選択する期間を時点t1〜t2までとしている。
【0089】
時点t4において、車輪速度Vwが目標車輪速度Vwtと等しくなると、ECU22は、保持モードから増圧モードに切り替え、増圧モードを維持する。この場合、ECU22は、INバルブ64a〜64dを開(OFF)とし、OUTバルブ66a〜66dを閉(OFF)とする。これにより、ホイールシリンダ62a〜62dにおけるブレーキ液圧Pbが増加する。但し、減圧モードの場合と同様、ブレーキ機械系16の特性上、ブレーキ液圧Pbの減少には若干の応答遅れが発生する。従って、図8では、時点t5まで車輪速度Vwと目標車輪速度Vwtとの差D1が増加し、その後、差D1が減少する。
【0090】
時点t6において、車輪速度Vwと目標車輪速度Vwtの差D1が閾値THD1を下回ると、ECU22は、増圧モードから減圧モードに切り替える。そして、時点t7まで減圧モードを維持したのち、時点t7において減圧モードから保持モードに切り替える。その後、時点t8において、車輪速度Vwが目標車輪速度Vwtと等しくなると、ECU22は、増圧モードを選択する。
【0091】
図8に示すように、ABS制御のみを実行する場合(上記パターン2)、レギュレータバルブ68a、68bは開(OFF)のままである。加えて、自動ブレーキ制御の作動を示す自動ブレーキフラグはオフのままである。
【0092】
(b)自動ブレーキ制御を伴うABS制御を実行する場合
図9は、自動ブレーキ制御を伴うABS制御を実行する場合(上記パターン4)の一例を示すタイムチャートである。時点t11において、車輪速度Vwと目標車輪速度Vwtとの差D1が閾値THD1を下回ると、ECU22は、ABS制御で用いるバルブモードとして、増圧モードから減圧モードに切り替える。そして、時点t12まで減圧モードを維持した後、時点t12において減圧モードから保持モードに切り替える。時点t12〜t13まで車輪速度Vwと目標車輪速度Vwtとの差D1が増加し、その後、当該差D1が減少する。
【0093】
時点t14において、車輪速度Vwが目標車輪速度Vwtと等しくなると、ECU22は、保持モードから増圧モードに切り替え、増圧モードを維持する。時点t15まで車輪速度Vwと目標車輪速度Vwtとの差D1が増加し、その後、差D1が減少する。
【0094】
時点t16において、自動ブレーキフラグがオン(ON)になると、ECU22は、駆動電流Irvによりレギュレータバルブ68a、68bを大きく閉じる。上記の通り、ブレーキアシスト制御が選択されている場合、レギュレータバルブ68a、68bの駆動電流Irvは「小」とされ、自動ブレーキ制御(第1自動ブレーキ制御又は第2自動ブレーキ制御)が選択されている場合、レギュレータバルブ68a、68bの駆動電流Irvは「大」とされる。また、時点t16において、ECU22は、目標車輪速度Vwtを引き下げると共に、減圧モードの選択を禁止する。これにより、ブレーキ液圧Pbが高い状態が維持され易くなるため、車体の減速度が大きくなる。
【0095】
(2−4)独立制御の判定の具体例
図10は、各車輪18のブレーキ液圧Pbと、前後G検出値及び前後G補正値との一例を示すタイムチャートである。図10において、「FL」は、左前輪18flのブレーキ液圧Pbを示し、「FR」は、右前輪18frのブレーキ液圧Pbを示し、「RL」は、左後輪18rlのブレーキ液圧Pbを示し、「RR」は、右後輪18rrのブレーキ液圧Pbを示す。
【0096】
時点t21において、ブレーキペダル54がオンになると、4輪全てが増圧モードとなり、4輪全てのブレーキ液圧Pbが増加する(4輪増圧)。これに伴って前後G検出値及び前後G補正値も上昇する。この際、ピークホールド処理(図7のS32)が開始される。時点t22において、左後輪18rl及び右後輪18rrは保持モードに移行する(2輪増圧2輪保持)。
【0097】
時点t23において、前後G補正値が閾値THG1以上となる。これにより、独立制御が開始される(図6のS18)。
【0098】
時点t24まで前後G検出値のピーク値が更新され続け、その後、前後G検出値が減少するが、この時点では2輪増圧2輪保持(「4輪増圧又はその後保持」)の状態にあるため、ピークホールド処理(図7のS32)が実行される。このため、時点t24後の前後G補正値は、ピーク値がリセットされる時点t27まで時点t24の値で保持される。
【0099】
時点t25において、前後G検出値が閾値THG1を下回るが、上記のように、「4輪増圧又はその後保持」の状態にあり、前後G補正値は、時点t24の時点の値がピーク値として保持され続けているため、閾値THG1以上のままである。このため、独立制御が実施され続ける。
【0100】
時点t26において、前後G検出値が閾値THG1以上となるが、時点t26での前後G補正値は閾値THG1以上のままであるため、独立制御の実施に影響はない(独立制御は実施を継続中である。)。
【0101】
時点t27において、右前輪18frが増圧モードから減圧モードに移行し、その直後に保持モードに移行する。時点t27から時点t28までは、1輪(右前輪18fr)減圧後保持、2輪(左後輪18rl及び右後輪18rr)増圧後保持並びに1輪(左前輪18fl)増圧である。従って、前後G検出値がそのまま前後G補正値として用いられる(図7のS33:NO)。また、時点t27から時点t28の間は、前後G補正値が閾値THG1以上であるため、独立制御が実行中である。従って、左前輪18flと右前輪18frのブレーキ液圧Pbは別々の値を取ることができる。
【0102】
時点t28において、左前輪18flが増圧モードから減圧モードに移行し、その直後に保持モードに移行する。また、時点t28において、左後輪18rl及び右後輪18rrは増圧モードに移行する。その結果、時点t28から時点t30までは、2輪(左前輪18fl及び右前輪18fr)減圧後保持、2輪(左後輪18rl及び右後輪18rr)増圧である。
【0103】
時点t29において、前後G補正値(=前後G検出値)が閾値THG1を下回る。そして、時点t32まで前後G補正値は閾値THG1を下回ったままである。このため、時点t29から時点t31までは独立制御が行われない。その結果、左前輪18flと右前輪18frは、同一のバルブモード(ここでは保持モード)となり、左後輪18rlと右後輪18rrは、同一のバルブモード(ここでは、時点t29から時点t30までは増圧モード、時点t30から時点t31までは減圧モード、時点t31から時点t32までは保持モード)となる。時点t32において、前後G補正値が閾値THG1以上になると、再び、独立制御が開始され、その後は前後G補正値が閾値THG1以上である状態が続くので、独立制御が継続される。
【0104】
時点t30から時点t33までは、4輪減圧後保持保持である。時点t33において、右前輪18fr及び左後輪18rlが増圧モードに移行する。そして、時点t34までは、2輪(右前輪18fr及び左後輪18rl)増圧、2輪(左前輪18fl及び右後輪18rr)減圧後保持の状態が続く。
【0105】
時点t34において、左前輪18fl及び右後輪18rrも増圧モードに移行する。これにより、4輪増圧となる。これに伴って、ピークホールド処理(図7のS32)が再開され、時点t35まで前後G補正値のピーク値が保持される。
【0106】
時点t35において、左後輪18rlが減圧モードに移行した後、保持モードに移行する。その結果、時点t35から時点t36までは、3輪(左前輪18fl、右前輪18fr及び右後輪18rr)増圧、1輪(左後輪18rl)減圧後保持の状態が続く。このため、時点t35から時点t36までは、減少フィルタ処理(図7のS34)が実施される。
【0107】
時点t36において、右前輪18fr及び右後輪18rrが減圧モードに移行した後、保持モードに移行する。その結果、時点t36から時点t37まで、1輪(左前輪18fl)増圧、3輪(右前輪18fr、左後輪18rl及び右後輪18rr)減圧後保持の状態となる。
【0108】
3.本実施形態の効果
以上のように、本実施形態によれば、アンチロック制御中にブレーキ液圧Pbが増圧又は増圧後保持となっている車輪18の数に応じて前後G検出値を補正した前後G補正値に基づいて路面推定を行う。従って、ブレーキ液圧Pbの増圧に伴って前後Gセンサ42が車両10のピッチング(すなわち、前後方向に対する車体の傾き変動)の影響を受けたとしても前後Gの検出精度を向上させることが可能となる。その結果、路面推定の精度を向上させることが可能となる。
【0109】
本実施形態では、全ての車輪18が増圧又はその後保持となっているときに、前後G検出値が減少している場合、減少前の前後G検出値を保持して前後G補正値とする(ピークホールド処理)。これにより、前後Gセンサ42が車両10のピッチング(ここでは、車体の後ろ側が路面に近づく傾き変動)の影響を受けた前後G検出値を出力している場合であっても、当該ピッチングの影響をキャンセルすることが可能となる。従って、路面推定の精度を向上することが可能となる。
【0110】
本実施形態では、全ての車輪18が増圧又はその後保持となった後、少なくとも1輪が減圧になったとき、前後G検出値を減少方向に補正して前後G補正値とする(減少フィルタ処理)。これにより、全ての車輪18が増圧又はその後保持となっていた状態から少なくとも1輪が減圧になったにもかかわらず、車両10のピッチング(ここでは、車体の前側が路面に近づく傾き変動)により前後G検出値が減少しない場合であっても、同検出値を減少させることができる。従って、路面推定の精度を向上することが可能となる。
【0111】
また、同軸に配置された複数の車輪18(例えば、左前輪18flと右前輪18fr)をそれぞれ独立してアンチロック制御を行う独立制御を、路面摩擦係数μが高い場合にのみ行う構成では、前後G検出値が前後Gの真値よりも高い値となっても、前後G検出値を減少方向に補正することにより、誤って独立制御を行うことを防止することが可能となる。従って、不適切な独立制御による車両10の挙動の乱れを防止することができる。
【0112】
本実施形態では、全ての車輪18が増圧又はその後保持となった後、1輪が減圧となったとき、前後G検出値が減少している場合、減少フィルタ処理を行う。このため、結果として、前後G検出値の増加方向の補正を禁止することとなる。全ての車輪18が増圧又は増圧後保持となった後、1輪が減圧となったとき、車両10の前後G(真値)は減少するはずであるが、車両10のピッチング(ここでは、車体の前側が路面に近づく傾き変動)から、前後G検出値が増加する場合がある。本実施形態によれば、前後G検出値の増加方向の補正を禁止するため、路面推定の精度を向上することが可能となる。
【0113】
本実施形態では、減速操作が行われていないにもかかわらず(図6のS12:NO)、前後G検出値に変化があった場合(S13:YES)、前後G検出値の補正を禁止する。これにより、例えば、車両10が登り坂を走行することによって生じる前後G検出値の減少を防止することが可能となる。
【0114】
本実施形態によれば、各ホイールシリンダ62a〜62dにおけるブレーキ液圧Pbの変化に応じて前後G検出値を補正して算出した前後G補正値に基づいて路面摩擦係数μ又は路面状態を推定する。これにより、例えば、各ホイールシリンダ62a〜62dのブレーキ液圧Pbが増圧しているにもかかわらず、車両10のピッチング(ここでは、車体の後ろ側が路面に近づく傾き変動)の影響で前後G検出値が減少した場合、当該ピッチングの影響をキャンセルすることが可能となる。
【0115】
或いは、全てのホイールシリンダ62a〜62dでブレーキ液圧Pbが増圧した後、一部のホイールシリンダ62a〜62dでブレーキ液圧Pbが減圧したにもかかわらず、車両10のピッチング(ここでは、車体の前側が路面に近づく傾き変動)の影響で前後G検出値が増加した場合、当該ピッチングの影響をキャンセルすることが可能となる。
【0116】
このため、前後G検出値が、車両10のピッチングの影響による誤差を含んだとしても、当該誤差をキャンセルすることが可能となる。従って、前後Gの検出精度及び路面推定の精度を向上することが可能となる。
【0117】
B.変形例
なお、この発明は、上記実施形態に限らず、この明細書、特許請求の範囲又は図面の記載内容に基づき、種々の構成を採り得ることはもちろんである。例えば、以下の構成を採用することができる。
【0118】
1.車両10
上記実施形態では、車両10は4輪車であったが、これに限られず、例えば、2輪車、トラック、バス等であってもよい。
【0119】
2.前後G補正値及び路面摩擦係数μの推定(前後G補正・μ推定機能110)
上記実施形態では、前後G検出値に基づく前後G補正値を利用して路面状態(低μ又は高μ)を判定したが、前後Gセンサ42の検出値(前後G検出値)をブレーキ液圧Pbの変化に応じて車両10のピッチングの影響を取り除く補正をした後、路面摩擦係数μ又は路面状態を推定するものであれば、これに限らない。例えば、前後G検出値に基づき前後G補正値を算出し、前後G補正値に基づき路面摩擦係数μを算出し、当該路面摩擦係数μを、低μ及び高μを判定するための閾値と比較して低μと高μを区別してもよい。或いは、前後G検出値に基づいて路面摩擦係数μを推定し、推定した路面摩擦係数μをブレーキ液圧Pbの変化に応じて補正をした後、補正後の路面摩擦係数μを、低μ及び高μを判定するための閾値と比較して低μと高μを区別してもよい。或いは、ブレーキ液圧Pbの変化に応じて閾値THG1を設定し、設定した閾値THG1を前後G補正値と比較することにより、低μと高μを区別することもできる。
【0120】
上記実施形態では、前後G補正値を独立制御の要否判定に用いたが、路面摩擦係数μ又は路面状態を用いる制御についてであれば、別の用途に用いることもできる。例えば、特許文献1のように、目標車輪速Vwtの演算に前後G補正値又は路面摩擦係数μを用いることもできる([0036]、[0037])。
【0121】
3.ABS制御(ABS機能112)
上記実施形態では、バルブモードの切替えの指標として目標車輪速度Vwtを用いたが、これに限らない。例えば、車体車速Vv若しくはその目標値、車輪速度Vw、ブレーキ液圧Pb若しくはその目標値又はスリップ率S若しくは目標スリップ率Stを用いてもよい。
【符号の説明】
【0122】
10…車両 12…制動力制御装置
18fl、18fr、18rl、18rr…車輪
22…ECU 42…前後加速度センサ
62a〜62d…ホイールシリンダ
110…前後G補正・μ推定機能(路面推定手段)
112…ABS機能(アンチロック制御手段)
【技術分野】
【0001】
この発明は、車輪に対する制動力を制御する制動力制御装置に関する。より詳細には、車輪のロックを防止するアンチロックブレーキ機能を有する制動力制御装置に関する。
【背景技術】
【0002】
車輪に対する制動力を制御する制動力制御装置が知られている。制動力制御装置の中には、車輪のロックを防止するアンチロックブレーキシステム(ABS)に関するものや(特許文献1、2)、緊急時にブレーキ液圧を高める緊急ブレーキシステムに関するものがある(特許文献2)。
【0003】
特許文献1では、車体速度(VR0)と、所定の路面摩擦係数(μ)と、所定の定数(a)とに基づいて目標車輪速度(VWt)を算出する([0036]、[0037]、[0055])。そして、車輪速度が目標車輪速度になるように、各車輪のブレーキトルク(T)を制御する([0038]〜[0042]、[0056]〜[0060])。
【0004】
特許文献2では、運転者のブレーキ操作による制動力を増大させるブレーキアシスト制御と、自動的に制動力を発生させる自動ブレーキ制御とを用いる(要約、請求項1)。
【0005】
また、路面摩擦係数の推定については、所定の制動状態における車両の前後加速度(前後G)に基づいて行うものが存在する(特許文献3)。すなわち、特許文献3では、急制動時における前後Gセンサ5の検出値に基づいて、低μ、高μ又は中μのいずれであるかを推定する(特許文献3の図35、[0119])。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2009−274582号公報
【特許文献2】特開2008−307999号公報
【特許文献3】特開平11−005421号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
上記のように、特許文献3では、急制動時の前後Gを用いて路面状態(低μ、高μ又は中μ)を推定するが、特許文献3の方法では、推定精度に改善の余地がある。
【0008】
この発明はこのような課題を考慮してなされたものであり、路面推定の精度を向上させることが可能な制動力制御装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
この発明に係る制動力制御装置は、前後加速度センサが検出した車両の前後加速度である前後加速度検出値に基づいて路面推定を行う路面推定手段と、ホイールシリンダにかかるブレーキ液圧を増圧、減圧又は保持させることで、車輪のロックを防止するアンチロック制御手段とを備えるものであって、前記路面推定手段は、アンチロック制御中に前記ブレーキ液圧が増圧又は増圧後保持となっている車輪の数に応じて前記前後加速度検出値を補正した前後加速度補正値に基づいて前記路面推定を行うことを特徴とする。
【0010】
この発明によれば、アンチロック制御中にブレーキ液圧が増圧又は増圧後保持となっている車輪の数に応じて前後加速度検出値を補正した前後加速度補正値に基づいて路面推定を行う。従って、ブレーキ液圧の増圧に伴って前後加速度センサが車両のピッチング(すなわち、前後方向に対する車体の傾き変動)の影響を受けたとしても前後加速度センサの検出精度を向上させることが可能となる。その結果、路面推定の精度を向上させることが可能となる。
【0011】
全ての前記車輪が増圧又は増圧後保持となっているときに前記前後加速度検出値が減少している場合、減少前の前記前後加速度検出値を保持して前記前後加速度補正値としてもよい。これにより、前後加速度センサが車両のピッチング(ここでは、車体の後ろ側が路面に近づく傾き変動)の影響を受けた前後加速度検出値を出力している場合であっても、当該ピッチングの影響をキャンセルすることが可能となる。従って、路面推定の精度を向上することが可能となる。
【0012】
全ての前記車輪が増圧又は増圧後保持となった後、少なくとも1輪が減圧になったとき、前記前後加速度検出値を減少方向に補正して前記前後加速度補正値としてもよい。
【0013】
これにより、全ての車輪が増圧又は増圧後保持となっていた状態から少なくとも1輪が減圧になったにもかかわらず、車両のピッチング(ここでは、車体の前側が路面に近づく傾き変動)により前後加速度検出値が減少しない場合であっても、同検出値を減少させることができる。従って、路面推定の精度を向上することが可能となる。
【0014】
また、同軸に配置された複数の車輪(例えば、左前輪と右前輪)をそれぞれ独立してアンチロック制御を行う独立制御を、路面摩擦係数が高い場合にのみ行う構成では、前後加速度検出値が実際の前後加速度よりも高い値となっても、当該検出値を減少方向に補正することにより、誤って独立制御を行うことを防止することが可能となる。従って、不適切な独立制御による車両挙動の乱れを防止することができる。
【0015】
全ての前記車輪が増圧又は増圧後保持となった後、少なくとも1輪が減圧となったとき、前記前後加速度検出値が減少している場合、前記前後加速度検出値の増加方向の補正を禁止してもよい。全ての車輪が増圧又は増圧後保持となった後、少なくとも1輪が減圧となったとき、車両の前後加速度(真値)は減少するはずであるが、車両のピッチング(ここでは、車体の前側が路面に近づく傾き変動)から、前後加速度検出値は増加する場合がある。上記構成によれば、前後加速度検出値の増加方向の補正を禁止するため、路面推定の精度を向上することが可能となる。
【0016】
前記制動力制御装置は、さらに、前記車両の減速操作を判定する減速操作判定手段を有し、前記減速操作が行われていないにもかかわらず、前記前後加速度検出値が増加した場合、前記前後加速度検出値の補正を禁止してもよい。これにより、例えば、車両が登り坂を走行することによって生じる前後加速度センサの出力値の減少を防止することが可能となる。
【0017】
この発明に係る制動力制御装置は、前後加速度センサが検出した車両の前後加速度である前後加速度検出値に基づいて路面摩擦係数又は路面状態を推定する路面推定手段と、ホイールシリンダにかかるブレーキ液圧を増圧、減圧又は保持させることで、車輪のロックを防止するアンチロック制御を実行するアンチロック制御手段とを備えるものであって、前記路面推定手段は、各ホイールシリンダにおける前記ブレーキ液圧の変化に応じて前記前後加速度検出値を補正して前後加速度補正値を演算し、前記前後加速度補正値に基づいて前記路面摩擦係数若しくは前記路面状態を推定する、若しくは前記前後加速度検出値に応じて算出した路面摩擦係数を、各ホイールシリンダにおける前記ブレーキ液圧の変化に応じて補正する、又は前記路面状態を判定するための前記前後加速度検出値若しくは前記路面摩擦係数の閾値を各ホイールシリンダにおける前記ブレーキ液圧の変化に応じて設定することを特徴とする。
【0018】
この発明によれば、各ホイールシリンダにおけるブレーキ液圧の変化に応じて前後加速度検出値(前後G検出値)を補正して算出した前後G補正値に基づいて路面摩擦係数又は路面状態を推定する。或いは、前後G検出値に応じて算出した路面摩擦係数を、各ホイールシリンダにおける前記ブレーキ液圧の変化に応じて補正する。或いは、路面状態を判定するための前後加速度検出値又は路面摩擦係数の閾値を各ホイールシリンダにおけるブレーキ液圧の変化に応じて設定する。
【0019】
これらにより、例えば、各ホイールシリンダのブレーキ液圧が増圧しているにもかかわらず、車両のピッチング(ここでは、車体の後ろ側が路面に近づく傾き変動)の影響で前後G検出値が減少した場合、当該ピッチングの影響をキャンセルすることが可能となる。
【0020】
或いは、全てのホイールシリンダでブレーキ液圧が増圧した後、一部のホイールシリンダでブレーキ液圧が減圧したにもかかわらず、車両のピッチング(ここでは、車体の前側が路面に近づく傾き変動)の影響で前後G検出値が増加した場合、当該ピッチングの影響をキャンセルすることが可能となる。
【0021】
このため、前後G検出値が、車両のピッチングの影響による誤差を含んだとしても、当該誤差をキャンセルすることが可能となる。従って、前後Gの検出精度及び路面推定の精度を向上することが可能となる。
【発明の効果】
【0022】
この発明によれば、アンチロック制御中にブレーキ液圧が増圧又は増圧後保持となっている車輪の数に応じて前後加速度検出値を補正した前後加速度補正値に基づいて路面推定を行う。従って、ブレーキ液圧の増圧に伴って前後加速度センサが車両のピッチングの影響を受けたとしても前後加速度センサの検出精度を向上させることが可能となる。その結果、路面推定の精度を向上させることが可能となる。
【図面の簡単な説明】
【0023】
【図1】この発明の一実施形態に係る制動力制御装置を有する車両のブロック構成図である。
【図2】前記実施形態におけるブレーキ機械系の概略構成図である。
【図3】前記ブレーキ機械系を制御するフローチャートである。
【図4】前記実施形態におけるブレーキモードの選択に関する説明図である。
【図5】前記実施形態においてABS制御等に応じてINバルブ、OUTバルブ及びレギュレータバルブの開閉制御及びポンプのオンオフ制御を示す図である。
【図6】路面摩擦係数μの推定及び独立制御の実施の要否判定を行うフローチャートである。
【図7】前後G検出値を補正するフローチャートである。
【図8】ABS制御のみを実行する場合の一例を示すタイムチャートである。
【図9】ブレーキアシスト制御及び自動ブレーキ制御を伴うABS制御を実行する場合の一例を示すタイムチャートである。
【図10】各車輪のブレーキ液圧と、前後G検出値及び前後G補正値との一例を示すタイムチャートである。
【発明を実施するための形態】
【0024】
A.一実施形態
1.車両10の構成
(1−1)全体構成
図1は、この発明の一実施形態に係る制動力制御装置12を有する車両10(以下「自車10」ともいう。)のブロック構成図である。制動力制御装置12は、各種の検出を行うセンサ群14と、車輪18fl、18fr、18rl、18rr(以下「車輪18」と総称する。)に対して制動力Fbを付与するブレーキ機械系16と、警報装置20と、センサ群14の検出値に基づいてブレーキ機械系16を制御する電子制御装置22(以下「ECU22」という。)とを有する。
【0025】
(1−2)センサ群14
図1に示すように、センサ群14には、レーダ30、ヨーレートセンサ32、舵角センサ34、トルクセンサ36、車体速度センサ38(車速センサ)、車輪速センサ40a〜40d、前後加速度センサ42(以下「前後Gセンサ42」という。)、横加速度センサ44(以下「横Gセンサ44」という。)、第1操作量センサ46及び第2操作量センサ48を含む。
【0026】
レーダ30は、図示しないフロントグリル部等に設けられ、車両10の前方に向けてミリ波等の電磁波を送信波として送信し、その反射波に基づいて障害物(例えば、先行車等)までの距離(相対距離Dr)[m]、自車10からの方向及び当該障害物の大きさを検出し、ECU22に送信する。レーダ30の代わりに、例えば、画像センサを用いてもよい。ヨーレートセンサ32は、車両10に発生しているヨーレートYrを検出する。舵角センサ34は、操向ハンドル50(ステアリングホイール)の舵角θsを検出する。トルクセンサ36は、操向ハンドル50にかかるトルクTQを検出する。
【0027】
車体速度センサ38は、トランスミッションのカウンタシャフトの回転を検出する第1ホール素子(いずれも図示せず)と、当該第1ホール素子の出力に基づいて車体速度Vv[km/h]を演算する第1演算部(図示せず)とを備える。第1演算部は、ECU22に設けてもよい。
【0028】
車輪速センサ40a〜40dは、各車輪18の回転を検出する第2ホール素子(図示せず)と、当該第2ホール素子の出力に基づいて各車輪18fl、18fr、18rl、18rrの車輪速度Vw1、Vw2、Vw3、Vw4(以下「車輪速度Vw」と総称する。)[km/h]を演算する第2演算部(図示せず)とを備える。第2演算部は、ECU22に設けてもよい。
【0029】
前後Gセンサ42は、車両10に発生している前後加速度(前後G)を検出する。横Gセンサ44は、車両10に発生している横加速度(横G)を検出する。第1操作量センサ46は、アクセルペダル52の操作量θaを検出する。第2操作量センサ48は、ブレーキペダル54の操作量θbを検出する。
【0030】
(1−3)ブレーキ機械系16
図2には、ブレーキ機械系16の概略構成図が示されている。図2に示すように、ブレーキ機械系16は、マスタシリンダ60、ホイールシリンダ62a〜62d、INバルブ64a〜64d、OUTバルブ66a〜66d、レギュレータバルブ68a、68b、サクションバルブ70a、70b、ポンプ72a、72b、ポンプモータ74、リザーバ76a、76b、ダンパ室78a、78b、チェック弁80a〜80d、82a、82b、84a、84b、86a、86b及び圧力計88を有する。
【0031】
INバルブ64a〜64d及びレギュレータバルブ68a、68bはノーマルオープン型の電磁弁であり、OUTバルブ66a〜66d及びサクションバルブ70a、70bはノーマルクローズ型の電磁弁である。各バルブ64a〜64d、66a〜66d、68a、68b、70a、70bは、ECU22からの指令に基づき開閉する(詳細は図5等を参照して後述する。)。圧力計88は、配管90における圧力Piを検出する。
【0032】
(1−4)警報装置20
警報装置20は、図示しないスピーカを備え、ECU22からの指令の下、運転者に対する警告音を発する。
【0033】
(1−5)ECU22
図1に示すように、ECU22は、ハードウェアとして、入出力部100、演算部102及び記憶部104を有する。本実施形態の演算部102は、記憶部104に記憶されているプログラムに基づきブレーキ機械系16を制御することにより、前後G補正・μ推定機能110、制動力制御装置機能112(以下「ABS機能112」という。)、トラクション制御機能114、横滑り防止機能116、回避操作支援機能118及び緊急ブレーキ機能120を実現する。
【0034】
前後G補正・μ推定機能110は、前後Gセンサ42が検出した前後G(以下「前後G検出値」という。)を補正して前後G補正値を算出すると共に、当該前後G補正値を用いて路面摩擦係数μを推定する(詳細は図6等を参照して後述する。)。
【0035】
ABS機能112は、ブレーキ機械系16から車輪18に対して制動力Fbが加えられている際(ブレーキ操作時)に車輪18のロックを防止する機能である。トラクション制御機能114は、駆動輪である車輪18のうち非ブレーキ操作時に過剰スリップ状態に陥りそうな駆動輪に対応したホイールシリンダ62a〜62dのブレーキ液圧Pbを制御する機能である。トラクション制御機能114は、例えば、加速時等の車輪18の空転を防ぐために用いられる。横滑り防止機能116は、車両10がカーブ等を旋回する際の横滑りを防止する機能である。
【0036】
回避操作支援機能118は、運転者が自車10を障害物から回避させるために操向ハンドル50を操作する際、当該操作を補助する機能である。ここにいう補助とは、図示しない補助モータを用いて回避方向への操舵をアシストする機能や、操舵を行うべきではない操舵方向への操舵に前記補助モータを用いて抵抗を付与する機能を含む。
【0037】
緊急ブレーキ機能120は、さらに、ブレーキアシスト機能122と、自動ブレーキ機能124とを含む。ブレーキアシスト機能122は、運転者によるブレーキペダル54の操作によって発生したブレーキ液圧Pbを通常よりも大きくする機能である。自動ブレーキ機能124は、各ホイールシリンダ62a〜62dにおけるブレーキ液圧Pbを自動的に(運転者によるブレーキペダル54の操作なしに)増加させる機能である。ブレーキアシスト機能122及び自動ブレーキ機能124におけるブレーキ液圧Pbを増加させる手法としては、例えば、ポンプ72a、72bを用いたものや、マスタシリンダ60の液圧を増加させるアキュームレータやモータを用いたものを挙げることができる。
【0038】
2.ブレーキ機械系16の制御
(2−1)ブレーキ機械系16の制御の流れ
図3には、ブレーキ機械系16を制御するフローチャートが示されている。ステップS1において、ECU22は、センサ群14から検出値を取得する。この際、センサ群14における各種センサの値は、ECU22においてそのまま用いることができるものと、演算部102での演算処理により具体的な数値を演算する必要があるものとが存在する。このため、ステップS1では、後者については、検出値を取得するのみならず、演算処理を実行し、より具体的な数値を得る。
【0039】
ステップS2において、ECU22は、ステップS1で取得した検出値に基づいて、緊急ブレーキ制御(緊急ブレーキ機能120)用の制御パラメータを演算する。本実施形態における当該制御パラメータは、相対速度Vr及び接触余裕時間(TTC:Time To Collision)である。
【0040】
ECU22は、レーダ30からの相対距離Drに基づいて自車10と障害物との相対速度Vr[km/h]を演算する。相対速度Vrは、以下の式(1)に基づいて算出される。
Vr(x)={Dr(x)−Dr(x−1)}/Tc ・・・(1)
【0041】
上記式(1)において、Tcは演算周期[s](固定値)を示し、xは、今回の演算周期Tcにおける値を示し、x−1は、前回の演算周期Tcにおける値を示す。
【0042】
次いで、ECU22は、以下の式(2)を用いてTTCを求める。
TTC(x)=Dr(x)/Vr(x) ・・・(2)
【0043】
図3のステップS3において、ECU22は、車両状態を演算する。ここでの車両状態としては、ブレーキ機械系16から車輪18に対して制動力Fbを付与している制動状態と、車両10が加速している加速状態と、運転者が操向ハンドル50を操作して舵角θsが変化している操舵状態と、上記いずれの状態でもない通常状態とが含まれる。従って、ECU22は、車両状態が、制動状態、加速状態、操舵状態又は通常状態のいずれであるかを演算する。当該演算には、ステップS1で取得した検出値を用いる。
【0044】
ステップS4において、ECU22は、緊急ブレーキ機能120のモード(ブレーキモード)を選択する。ブレーキモードとしては、通常モード、警報モード、ブレーキアシストモード、第1自動ブレーキモード及び第2自動ブレーキモードが含まれる。
【0045】
図4には、ブレーキモードの選択に関する説明図が示されている。図4からわかるように、本実施形態では、相対速度Vr及びTTCに基づいてブレーキモードを設定する。すなわち、自車10が障害物に接近することで、相対速度VrとTTCの組合せが警報基準時間ラインを下回ると、ECU22は、通常モードから警報モードに切り替える。そして、ECU22は、警報装置20を介して運転者に警報を発する。警報は、1回のみの出力、断続的な出力又は連続的な出力のいずれでもよい。
【0046】
自車10がさらに障害物に接近することで、相対速度VrとTTCの組合せがブレーキアシスト基準時間ラインを下回ると、ECU22は、ブレーキアシストモードを選択する。そして、ブレーキアシストモードが選択されている状態で運転者がブレーキペダル54を操作すると、ECU22は、ブレーキペダル54の操作量θbに応じてブレーキ機械系16を制御してブレーキ液圧Pbを増大させる。なお、相対速度Vrが所定値Vr2(図4)以上である場合、警報基準時間ラインとブレーキアシスト基準時間ラインは一致し、警報モードとブレーキアシストモードとが同時に選択される。
【0047】
自車10がさらに障害物に接近することで、相対速度VrとTTCの組合せが自動ブレーキ1基準時間ラインを下回ると、ECU22は、第1自動ブレーキモードを選択する。そして、第1自動ブレーキモードが選択されている間、ECU22は、ブレーキペダル54の操作量θbから独立してブレーキ機械系16を制御してブレーキ液圧Pbを増大させる。
【0048】
自車10がさらに障害物に接近することで、相対速度VrとTTCの組合せが自動ブレーキ2基準時間ラインを下回ると、ECU22は、第2自動ブレーキモードを選択する。そして、第2自動ブレーキモードが選択されている間、ECU22は、ブレーキペダル54の操作量θbから独立してブレーキ機械系16を制御してブレーキ液圧Pbを増大させる。ここでの増大の度合いは、第1自動ブレーキモードの場合よりも大きくなる。
【0049】
なお、相対速度Vrが所定値Vr1(図4)以下である場合、自動ブレーキ1基準時間ラインと自動ブレーキ2基準時間ラインは一致し、第2自動ブレーキモードが優先して選択される。なお、以下では、第1自動ブレーキモード(第1自動ブレーキ制御)と第2自動ブレーキモード(第2自動ブレーキ制御)を合わせて「自動ブレーキモード(自動ブレーキ制御)」と総称する。また、第1自動ブレーキ制御によるブレーキと第2自動ブレーキ制御によるブレーキを合わせて「自動ブレーキ」と総称する。
【0050】
相対速度VrとTTCの組合せが、警報基準時間ラインを上回る場合、上記各モード(警報モード、ブレーキアシストモード、第1自動ブレーキモード及び第2自動ブレーキモード)のいずれも選択されず、通常モードが選択される。通常モードでは、通常のブレーキ液圧Pbが発生される。
【0051】
また、図4に伴う処理の更なる詳細については、特許文献2に記載のものを用いることができる(例えば、特許文献2の図4、段落[0031]〜[0045]参照)。
【0052】
図3に戻り、ステップS5において、ECU22は、ステップS4で選択したブレーキモードに応じてブレーキ機械系16による制動力Fbを演算する。例えば、通常モード又は警報モードが選択されている場合、ECU22は、ブレーキ機械系16による付加的な制動力Fbは発生させず、ブレーキペダル54の操作に応じた通常のブレーキ液圧Pbが発生するようにブレーキ機械系16による制動力Fbを制御する。
【0053】
また、ブレーキアシストモードが選択されている場合、ECU22は、ブレーキペダル54の操作に伴って発生する通常のブレーキ液圧Pbに加える付加的なブレーキ液圧Pb(付加的な制動力Fb)を、ブレーキペダル54の操作量θb又は踏力に応じて演算する。
【0054】
さらに、第1自動ブレーキモードが選択されている場合、ECU22は、ブレーキペダル54の操作にかかわらずブレーキ機械系16により発生させる付加的な制動力Fbを演算する。同様に、第2自動ブレーキモードが選択されている場合、ECU22は、ブレーキペダル54の操作にかかわらずブレーキ機械系16により発生させる付加的な制動力Fbを演算する。上記のように、相対速度Vr及びTTCが等しい場合、第2自動ブレーキモードにおける付加的な制動力Fbは、第1自動ブレーキモードにおける付加的な制動力Fbよりも大きくなる。
【0055】
ステップS6において、ECU22は、ABS制御(ABS機能112)を実行するか否かを判定する。本実施形態では、ブレーキペダル54が踏まれると(操作量θbがゼロより大きいとき)、ECU22は、ABS制御を実行すると判定する。
【0056】
ABS制御を実行しない場合(S6:NO)、ステップS9に進む。ABS制御を実行する場合(S6:YES)、ステップS7において、ECU22は、ABS制御で用いる制御パラメータを演算する。本実施形態における当該パラメータは、路面摩擦係数μ、目標スリップ率St及び目標車輪速度Vwtである。
【0057】
路面摩擦係数μは、前後Gセンサ42が検出した前後G(前後G検出値)に基づいて算出される。すなわち、特許文献3の図35及び[0119]にも示されているように、ブレーキの作動状態(例えば、急制動状態)と前後Gに応じて路面摩擦係数μを推定することが可能である。なお、ブレーキの作動状態は、例えば、ブレーキ液圧Pb、ブレーキペダル54の操作量θb若しくは踏力などにより判定可能である。また、本実施形態では、路面摩擦係数μの推定に用いる前後Gは、ブレーキ液圧Pbの変化に応じて前後G検出値を補正した前後G補正値である(詳細は図6等を参照して後述する。)。
【0058】
さらに、本実施形態では、独立制御の要否を判定するため、路面摩擦係数μが低い状態(以下、この状態を「低μ」という。)と、路面摩擦係数μが高い状態(以下、この状態を「高μ」という。)を判定し、高μの場合、独立制御を実行し、低μの場合、独立制御を実行しない。独立制御は、同軸に配置された複数の車輪18(例えば、左前輪18flと右前輪18fr)それぞれに対して独立してアンチロック制御を行う制御である。
【0059】
目標スリップ率Stは、車輪18のスリップ率Sの目標値である。スリップ率Sは、車体速度Vvと車輪速度Vwの差を車体速度Vvで除したものである{S=(Vv−Vw)/Vv}。本実施形態において、目標スリップ率Stは固定値とされる。代わりに、車両10が走行している路面の種類(アスファルト、砂利道等)、路面状態(ドライ、ウェット等)、車体速度Vv等により可変とすることもできる。なお、前記路面の種類は、例えば、ナビゲーション装置(ナビゲーション装置の機能を有する携帯情報端末を含む。)により取得することができる。前記路面状態は、例えば、前記路面摩擦係数μにより推定することができる。
【0060】
さらに、本実施形態では、ブレーキモードとしてブレーキアシストモード、第1自動ブレーキモード又は第2自動ブレーキモードが選択されており且つABS制御が実行されている場合、目標スリップ率Stを増加させる。ここでの目標スリップ率Stの増加度合いは、ブレーキアシストモードよりも第1自動ブレーキモードを大きくし、さらに、第1自動ブレーキモードよりも第2自動ブレーキモードを大きくする。
【0061】
図4からわかるように、本実施形態では、通常、ブレーキモードが、通常モード、警報モード、ブレーキアシストモード、第1自動ブレーキモード及び第2自動ブレーキモードの順に変化していく。ブレーキモードが第2自動ブレーキモードに向かうほど、前方の障害物との接触の可能性が高くなる一方、運転者の操作により舵角θsが変更される可能性は低くなるといえる。このため、ブレーキモードが第2自動ブレーキモードに向かうほど目標スリップ率Stを増加させることで、舵角θsの変更が低い状況で車両10の減速度を高めることが可能となる。
【0062】
目標車輪速度Vwtは、車体速度Vv及び目標スリップ率Stに応じて算出することができる。例えば、目標車輪速度Vwtが車体速度Vv以下となるように、目標車輪速度Vwtと車体速度Vvとの差を事前に設定しておき、当該差を用いて目標車輪速度Vwtを算出することができる。当該差は、目標スリップ率Stに応じて設定することができる。
【0063】
図3のステップS8において、ECU22はバルブモードを選択する。本実施形態のバルブモードには、増圧モード、減圧モード及び保持モードがある。増圧モードは、ホイールシリンダ62a〜62dにかかるブレーキ液圧Pbを増大させるモードである。減圧モードは、ホイールシリンダ62a〜62dにかかるブレーキ液圧Pbを減少させるモードである。保持モードは、ホイールシリンダ62a〜62dにかかるブレーキ液圧Pbを保持させるモードである。
【0064】
実際の車輪速度Vwと目標車輪速度Vwtとの差D1(=Vw−Vwt)が閾値THD1を下回ると、ECU22は、一時的に減圧モードを選択し、その後、車輪速度Vwが目標車輪速度Vwtと等しくなるまで保持モードを選択する。また、実際の車輪速度Vwが目標車輪速度Vwtを上回ると、ECU22は、増圧モードを選択し、その後、車輪速度Vwが目標車輪速度Vwtと等しくなるまで増圧モードを選択する。
【0065】
但し、本実施形態では、ブレーキモードとして第1自動ブレーキモード又は第2自動ブレーキモードが選択され、ABS制御が実行され且つ車体速度Vvが閾値THVv以下である場合、減圧モードの選択が禁止される。このため、ECU22は、減圧モード又は保持モードしか選択することができない。
【0066】
本実施形態において、閾値THVvには、車体を横移動させる可能性が低い速度が設定される。車体を横移動させる可能性が低い速度とは、例えば、横滑り防止機能116及び回避操作支援機能118の少なくとも一方を作動させるか否かを判定する速度閾値(例えば、30〜40km/hの中から選択された値)とすることができる。
【0067】
ステップS9において、ECU22は、ステップS8で選択したバルブモードに応じて(S6:YESの場合)又はステップS5で演算した制動力に応じて(S6:NOの場合)、各バルブを制御する。
【0068】
図5には、ABS制御等に応じてINバルブ64a〜64d、OUTバルブ66a〜66d、レギュレータバルブ68a、68bの開閉制御及びポンプ72a、72bのオンオフ制御を示す図である。図5に示すように、ABS制御を伴わない通常制御(パターン1)では、ノーマルオープン型のINバルブ64a〜64d及びレギュレータバルブ68a、68bはいずれも開(OFF)であり、ノーマルクローズ型のOUTバルブ66a〜66dは閉(OFF)である。また、ポンプ72a、72bはオフ(OFF)とする。
【0069】
ブレーキアシスト制御又は自動ブレーキ制御を伴わないABS制御(パターン2)では、レギュレータバルブ68a、68bは開(OFF)とされ、ポンプ72a、72bはオン(ON)にされた状態で、実際の車輪速度Vwと目標車輪速度Vwtとの関係に応じてINバルブ64a〜64d及びOUTバルブ66a〜66dが開閉(ON/OFF)される。すなわち、車輪速度Vwが目標車輪速度Vwtを上回っている場合、INバルブ64a〜64dが開に、OUTバルブ66a〜66dが閉とされる。車輪速度Vwと目標車輪速度Vwtの差D1が閾値THD1を下回っている場合、INバルブ64a〜64dが閉に、OUTバルブ66a〜66dが開とされる。車輪速度Vwが目標車輪速度Vwtと等しい場合、INバルブ64a〜64d及びOUTバルブ66a〜66dいずれも閉とされる。
【0070】
ブレーキアシスト制御を伴うABS制御(パターン3)では、レギュレータバルブ68a、68bは、マスタシリンダ60側とホイールシリンダ62a〜62d側との差圧に応じて開閉制御される。他にも、レギュレータバルブ68a、68bを比較的少ない駆動電流Irvにより少し閉じ、ポンプ72a、72bをオンにした状態で、パターン2と同様、実際の車輪速度Vwと目標車輪速度Vwtとの関係に応じてINバルブ64a〜64d及びOUTバルブ66a〜66dを開閉する制御であってもよい。これにより、ブレーキペダル54の操作に伴うブレーキ液圧Pbによる制動を基本としつつ、ブレーキアシスト制御によるブレーキ液圧Pbを発生させてブレーキペダル54の操作を補助することが可能となる。
【0071】
自動ブレーキ制御を伴うABS制御(パターン4)では、レギュレータバルブ68a、68bは閉じられる。他にも、レギュレータバルブ68a、68bを比較的大きな駆動電流Irvにより大きく閉じ、ポンプ72a、72bをオンにした状態で、パターン2、3と同様、実際の車輪速度Vwと目標車輪速度Vwtとの関係に応じてINバルブ64a〜64d及びOUTバルブ66a〜66dを開閉する制御であってもよい。従って、パターン3と比較して、パターン4では、ポンプ72a、72bからホイールシリンダ62a〜62dに付加されるブレーキ液圧Pbが大きくなり、より大きな制動力Fbを生じさせることができる。これにより、自動ブレーキ制御により発生させたブレーキ液圧Pbによる制動を行うことが可能となる。
【0072】
(2−2)路面摩擦係数μの推定及び独立制御の実施の要否判定
図6は、路面摩擦係数μの推定及び独立制御の実施の要否判定を行うフローチャートである。
【0073】
ステップS11において、ECU22(前後G補正・μ推定機能110)は、前後Gセンサ42から前後G検出値を取得する。ステップS12において、ECU22は、ブレーキペダル54が踏み込まれているか否か、すなわち、ブレーキペダル54がオンであるか否かを判定する。ブレーキペダル54がオンである場合(S12:YES)、ステップS14に進む。ブレーキペダル54がオンでない場合(S12:NO)、ステップS13に進む。なお、ステップS12に先行して図3のステップS6(ABS制御)でも同様の判定を行っている。このため、ステップS12を省略してステップS14に進むこともできる。
【0074】
ステップS13において、ECU22は、前後G検出値に変化があるか否かを判定する。当該判定は、例えば、今回の演算における前後G検出値又はその移動平均値と、前回の演算における前後G検出値又はその移動平均値との差を算出し、当該差が、前後G検出値の変化を判定するための閾値を超えるか否かにより行う。
【0075】
前後G検出値に変化がない場合(S13:NO)、ステップS14に進む。前後G検出値に変化がある場合(S13:YES)、路面摩擦係数μの推定を行わずに今回の処理を終了する。換言すると、減速操作が行われていないにもかかわらず、前後G検出値が変化した場合、前後G検出値の補正を禁止する。これにより、例えば、車両10が登り坂を走行することによって生じる前後G検出値の減少を防止することが可能となる。
【0076】
ステップS14において、ECU22は、前後G検出値の補正を行う。当該補正は、車両10のピッチング(すなわち、前後方向に対する車体の傾き変動)の影響をキャンセルするために行うものである(詳細は図10等を参照して後述する)。
【0077】
図7は、前後G検出値を補正するフローチャートである。ステップS31において、ECU22は、4輪、即ち、全ての車輪18が増圧モードであるか(4輪増圧であるか)、又は4輪増圧後、いずれかの車輪18が保持モードであるか(その後保持又は増圧後保持であるか)を判定する。
【0078】
4輪増圧又はその後保持である場合(S31:YES)、ステップS32において、ECU22は、ピークホールド処理を行う。具体的には、今回の前後G検出値が最大値(ピーク値)である場合、今回の前後G検出値を前後G補正値としてその後の処理で用いる。一方、今回の前後G検出値が最大値でない場合、前回までの前後G検出値の最大値を前後G補正値としてその後の処理で用いる。
【0079】
ステップS31において、4輪増圧及びその後保持でない場合(S31:NO)、ステップS33において、ECU22は、4つの車輪18のうち3輪が増圧モードであり且つ残りの1輪が減圧モードであるか(3輪増圧及び1輪減圧であるか)、又は3輪増圧及び1輪減圧の後、いずれかの車輪18が保持モードであるか(その後保持であるか)を判定する。
【0080】
3輪増圧及び1輪減圧又はその後保持である場合(S33:YES)、ステップS34において、ECU22は、減少フィルタ処理を行う。具体的には、今回の前後G検出値が前回の前後G検出値と比べて等しい、小さい又は大きい場合のいずれであっても、前回の前後G検出値から所定値を引いたものを前後G補正値としてその後の処理で用いる。
【0081】
これは、通常のブレーキングでは、4輪全てが増圧となった後、減圧になることを前提としている。すなわち、4輪全てが増圧となった後、少なくとも1輪が減圧となった場合、前後G(真値)は減少するはずである。そこで、車両10のピッチング(ここでは、車体の前側が路面に近づく傾き変動)により前後G検出値が増加した場合でも、減少フィルタ処理により前後G検出値を減少させることで、前後G検出値を前後Gの真値に近づけることが可能となる。
【0082】
なお、ここでの所定値は、4輪全てが増圧となった後、少なくとも1輪が減圧となった場合の実験値又は理論値を用いることができる。
【0083】
3輪増圧及び1輪減圧並びにその後保持でない場合(S33:NO)、ステップS35において、ECU22は、ステップS32で保持(ホールド)していたピーク値をリセットして今回の処理を終える。従って、前回の処理が4輪増圧及びその後保持でなかった場合、今回の処理では、前後G検出値をそのまま前後G補正値として用いる。なお、ピーク値のリセットは、4輪増圧及びその後保持の状態が終了した後であれば、別の条件(例えば、4輪増圧及びその後保持の終了時点)であってもよい。
【0084】
図6に戻り、ステップS15において、ECU22(前後G補正・μ推定機能110)は、前後G補正値に基づいて路面摩擦係数μを推定する。当該推定は、前後G補正値と路面摩擦係数μとの関係を事前にマップとして記憶部104に記憶しておき、前後G補正値に対応する路面摩擦係数μをマップから読み出すことにより行う。なお、例えば、減速操作の程度又はブレーキ液圧Pbの変化に応じて複数のマップを設けることもできる。
【0085】
ステップS16〜S20では、前後G補正値に基づいて路面状態の推定及び独立制御の実施要否の判定を行う。すなわち、ステップS16において、ECU22(前後G補正・μ推定機能110)は、前後G補正値が閾値THG1以上であるか否かを判定する。閾値THG1は、低μ路と高μ路とを判別するための閾値である。換言すると、閾値THG1は、独立制御を行うか否かを判定するための閾値である。前後G補正値が閾値THG1以上であるとき(S16:YES)、ステップS17において、ECU22(前後G補正・μ推定機能110)は、路面が高μ路であると判定する。続くステップS18において、ECU22(ABS機能112)は、独立制御を実行すると判定する。前後G補正値が閾値THG1以上でないとき(S16:NO)、ステップS19において、ECU22(前後G補正・μ推定機能110)は、路面が低μ路であると判定する。続くステップS20において、ECU22(ABS機能112)は、独立制御を実行しないと判定する。
【0086】
なお、ステップS17、S19の判定は、省略することもできる。また、前後G補正値と路面摩擦係数μとは対応関係にある。換言すると、所定の減速状態では、前後G補正値がわかれば、路面摩擦係数μを推定することができる。このため、前後G補正値を路面摩擦係数μに置き換えて路面状態の推定及び独立制御の実施の要否判定を行うこともできる。
【0087】
上記のように、独立制御は、同軸輪それぞれを独立してアンチロック制御を行う制御である。本実施形態では、左前輪18flと右前輪18frが同軸輪であり、左後輪18rlと右後輪18rrが同軸輪である。従って、独立制御を行っている場合、ECU22(ABS機能112)は、左前輪18flと右前輪18frのブレーキ液圧Pbの調整を独立して行うと共に、左後輪18rlと右後輪18rrのブレーキ液圧Pbの調整を独立して行う。また、独立制御を行っていない場合、ECU22(ABS機能112)は、左前輪18flと右前輪18frのブレーキ液圧Pbの調整を一致させると共に、左後輪18rlと右後輪18rrのブレーキ液圧Pbの調整を一致させる。
【0088】
(2−3)ブレーキ機械系16の制御の具体例
(a)ABS制御のみを実行する場合
図8は、ABS制御のみを実行する場合(上記パターン2)の一例を示すタイムチャートである。時点t1において、車輪速度Vwと目標車輪速度Vwtとの差D1(=Vw−Vwt)が閾値THD1を下回ると、ECU22は、ABS制御で用いるバルブモードとして、増圧モードから減圧モードに切り替える。そして、時点t2まで減圧モードを維持したのち、時点t2において減圧モードから保持モードに切り替える。時点t1から時点t2まで一時的に減圧モードを選択する際、ECU22は、INバルブ64a〜64dを閉(ON)とし、OUTバルブ66a〜66dを開(ON)とする。これにより、ホイールシリンダ62a〜62dにおけるブレーキ液圧Pbが減少する。但し、ブレーキ機械系16の特性上、ブレーキ液圧Pbの減少には若干の応答遅れが発生する。従って、図8では、時点t3まで車輪速度Vwと目標車輪速度Vwtとの差D1が増加し、その後、差D1が減少する。このため、ECU22は、このような応答遅れを考慮して減圧モードを選択する期間を時点t1〜t2までとしている。
【0089】
時点t4において、車輪速度Vwが目標車輪速度Vwtと等しくなると、ECU22は、保持モードから増圧モードに切り替え、増圧モードを維持する。この場合、ECU22は、INバルブ64a〜64dを開(OFF)とし、OUTバルブ66a〜66dを閉(OFF)とする。これにより、ホイールシリンダ62a〜62dにおけるブレーキ液圧Pbが増加する。但し、減圧モードの場合と同様、ブレーキ機械系16の特性上、ブレーキ液圧Pbの減少には若干の応答遅れが発生する。従って、図8では、時点t5まで車輪速度Vwと目標車輪速度Vwtとの差D1が増加し、その後、差D1が減少する。
【0090】
時点t6において、車輪速度Vwと目標車輪速度Vwtの差D1が閾値THD1を下回ると、ECU22は、増圧モードから減圧モードに切り替える。そして、時点t7まで減圧モードを維持したのち、時点t7において減圧モードから保持モードに切り替える。その後、時点t8において、車輪速度Vwが目標車輪速度Vwtと等しくなると、ECU22は、増圧モードを選択する。
【0091】
図8に示すように、ABS制御のみを実行する場合(上記パターン2)、レギュレータバルブ68a、68bは開(OFF)のままである。加えて、自動ブレーキ制御の作動を示す自動ブレーキフラグはオフのままである。
【0092】
(b)自動ブレーキ制御を伴うABS制御を実行する場合
図9は、自動ブレーキ制御を伴うABS制御を実行する場合(上記パターン4)の一例を示すタイムチャートである。時点t11において、車輪速度Vwと目標車輪速度Vwtとの差D1が閾値THD1を下回ると、ECU22は、ABS制御で用いるバルブモードとして、増圧モードから減圧モードに切り替える。そして、時点t12まで減圧モードを維持した後、時点t12において減圧モードから保持モードに切り替える。時点t12〜t13まで車輪速度Vwと目標車輪速度Vwtとの差D1が増加し、その後、当該差D1が減少する。
【0093】
時点t14において、車輪速度Vwが目標車輪速度Vwtと等しくなると、ECU22は、保持モードから増圧モードに切り替え、増圧モードを維持する。時点t15まで車輪速度Vwと目標車輪速度Vwtとの差D1が増加し、その後、差D1が減少する。
【0094】
時点t16において、自動ブレーキフラグがオン(ON)になると、ECU22は、駆動電流Irvによりレギュレータバルブ68a、68bを大きく閉じる。上記の通り、ブレーキアシスト制御が選択されている場合、レギュレータバルブ68a、68bの駆動電流Irvは「小」とされ、自動ブレーキ制御(第1自動ブレーキ制御又は第2自動ブレーキ制御)が選択されている場合、レギュレータバルブ68a、68bの駆動電流Irvは「大」とされる。また、時点t16において、ECU22は、目標車輪速度Vwtを引き下げると共に、減圧モードの選択を禁止する。これにより、ブレーキ液圧Pbが高い状態が維持され易くなるため、車体の減速度が大きくなる。
【0095】
(2−4)独立制御の判定の具体例
図10は、各車輪18のブレーキ液圧Pbと、前後G検出値及び前後G補正値との一例を示すタイムチャートである。図10において、「FL」は、左前輪18flのブレーキ液圧Pbを示し、「FR」は、右前輪18frのブレーキ液圧Pbを示し、「RL」は、左後輪18rlのブレーキ液圧Pbを示し、「RR」は、右後輪18rrのブレーキ液圧Pbを示す。
【0096】
時点t21において、ブレーキペダル54がオンになると、4輪全てが増圧モードとなり、4輪全てのブレーキ液圧Pbが増加する(4輪増圧)。これに伴って前後G検出値及び前後G補正値も上昇する。この際、ピークホールド処理(図7のS32)が開始される。時点t22において、左後輪18rl及び右後輪18rrは保持モードに移行する(2輪増圧2輪保持)。
【0097】
時点t23において、前後G補正値が閾値THG1以上となる。これにより、独立制御が開始される(図6のS18)。
【0098】
時点t24まで前後G検出値のピーク値が更新され続け、その後、前後G検出値が減少するが、この時点では2輪増圧2輪保持(「4輪増圧又はその後保持」)の状態にあるため、ピークホールド処理(図7のS32)が実行される。このため、時点t24後の前後G補正値は、ピーク値がリセットされる時点t27まで時点t24の値で保持される。
【0099】
時点t25において、前後G検出値が閾値THG1を下回るが、上記のように、「4輪増圧又はその後保持」の状態にあり、前後G補正値は、時点t24の時点の値がピーク値として保持され続けているため、閾値THG1以上のままである。このため、独立制御が実施され続ける。
【0100】
時点t26において、前後G検出値が閾値THG1以上となるが、時点t26での前後G補正値は閾値THG1以上のままであるため、独立制御の実施に影響はない(独立制御は実施を継続中である。)。
【0101】
時点t27において、右前輪18frが増圧モードから減圧モードに移行し、その直後に保持モードに移行する。時点t27から時点t28までは、1輪(右前輪18fr)減圧後保持、2輪(左後輪18rl及び右後輪18rr)増圧後保持並びに1輪(左前輪18fl)増圧である。従って、前後G検出値がそのまま前後G補正値として用いられる(図7のS33:NO)。また、時点t27から時点t28の間は、前後G補正値が閾値THG1以上であるため、独立制御が実行中である。従って、左前輪18flと右前輪18frのブレーキ液圧Pbは別々の値を取ることができる。
【0102】
時点t28において、左前輪18flが増圧モードから減圧モードに移行し、その直後に保持モードに移行する。また、時点t28において、左後輪18rl及び右後輪18rrは増圧モードに移行する。その結果、時点t28から時点t30までは、2輪(左前輪18fl及び右前輪18fr)減圧後保持、2輪(左後輪18rl及び右後輪18rr)増圧である。
【0103】
時点t29において、前後G補正値(=前後G検出値)が閾値THG1を下回る。そして、時点t32まで前後G補正値は閾値THG1を下回ったままである。このため、時点t29から時点t31までは独立制御が行われない。その結果、左前輪18flと右前輪18frは、同一のバルブモード(ここでは保持モード)となり、左後輪18rlと右後輪18rrは、同一のバルブモード(ここでは、時点t29から時点t30までは増圧モード、時点t30から時点t31までは減圧モード、時点t31から時点t32までは保持モード)となる。時点t32において、前後G補正値が閾値THG1以上になると、再び、独立制御が開始され、その後は前後G補正値が閾値THG1以上である状態が続くので、独立制御が継続される。
【0104】
時点t30から時点t33までは、4輪減圧後保持保持である。時点t33において、右前輪18fr及び左後輪18rlが増圧モードに移行する。そして、時点t34までは、2輪(右前輪18fr及び左後輪18rl)増圧、2輪(左前輪18fl及び右後輪18rr)減圧後保持の状態が続く。
【0105】
時点t34において、左前輪18fl及び右後輪18rrも増圧モードに移行する。これにより、4輪増圧となる。これに伴って、ピークホールド処理(図7のS32)が再開され、時点t35まで前後G補正値のピーク値が保持される。
【0106】
時点t35において、左後輪18rlが減圧モードに移行した後、保持モードに移行する。その結果、時点t35から時点t36までは、3輪(左前輪18fl、右前輪18fr及び右後輪18rr)増圧、1輪(左後輪18rl)減圧後保持の状態が続く。このため、時点t35から時点t36までは、減少フィルタ処理(図7のS34)が実施される。
【0107】
時点t36において、右前輪18fr及び右後輪18rrが減圧モードに移行した後、保持モードに移行する。その結果、時点t36から時点t37まで、1輪(左前輪18fl)増圧、3輪(右前輪18fr、左後輪18rl及び右後輪18rr)減圧後保持の状態となる。
【0108】
3.本実施形態の効果
以上のように、本実施形態によれば、アンチロック制御中にブレーキ液圧Pbが増圧又は増圧後保持となっている車輪18の数に応じて前後G検出値を補正した前後G補正値に基づいて路面推定を行う。従って、ブレーキ液圧Pbの増圧に伴って前後Gセンサ42が車両10のピッチング(すなわち、前後方向に対する車体の傾き変動)の影響を受けたとしても前後Gの検出精度を向上させることが可能となる。その結果、路面推定の精度を向上させることが可能となる。
【0109】
本実施形態では、全ての車輪18が増圧又はその後保持となっているときに、前後G検出値が減少している場合、減少前の前後G検出値を保持して前後G補正値とする(ピークホールド処理)。これにより、前後Gセンサ42が車両10のピッチング(ここでは、車体の後ろ側が路面に近づく傾き変動)の影響を受けた前後G検出値を出力している場合であっても、当該ピッチングの影響をキャンセルすることが可能となる。従って、路面推定の精度を向上することが可能となる。
【0110】
本実施形態では、全ての車輪18が増圧又はその後保持となった後、少なくとも1輪が減圧になったとき、前後G検出値を減少方向に補正して前後G補正値とする(減少フィルタ処理)。これにより、全ての車輪18が増圧又はその後保持となっていた状態から少なくとも1輪が減圧になったにもかかわらず、車両10のピッチング(ここでは、車体の前側が路面に近づく傾き変動)により前後G検出値が減少しない場合であっても、同検出値を減少させることができる。従って、路面推定の精度を向上することが可能となる。
【0111】
また、同軸に配置された複数の車輪18(例えば、左前輪18flと右前輪18fr)をそれぞれ独立してアンチロック制御を行う独立制御を、路面摩擦係数μが高い場合にのみ行う構成では、前後G検出値が前後Gの真値よりも高い値となっても、前後G検出値を減少方向に補正することにより、誤って独立制御を行うことを防止することが可能となる。従って、不適切な独立制御による車両10の挙動の乱れを防止することができる。
【0112】
本実施形態では、全ての車輪18が増圧又はその後保持となった後、1輪が減圧となったとき、前後G検出値が減少している場合、減少フィルタ処理を行う。このため、結果として、前後G検出値の増加方向の補正を禁止することとなる。全ての車輪18が増圧又は増圧後保持となった後、1輪が減圧となったとき、車両10の前後G(真値)は減少するはずであるが、車両10のピッチング(ここでは、車体の前側が路面に近づく傾き変動)から、前後G検出値が増加する場合がある。本実施形態によれば、前後G検出値の増加方向の補正を禁止するため、路面推定の精度を向上することが可能となる。
【0113】
本実施形態では、減速操作が行われていないにもかかわらず(図6のS12:NO)、前後G検出値に変化があった場合(S13:YES)、前後G検出値の補正を禁止する。これにより、例えば、車両10が登り坂を走行することによって生じる前後G検出値の減少を防止することが可能となる。
【0114】
本実施形態によれば、各ホイールシリンダ62a〜62dにおけるブレーキ液圧Pbの変化に応じて前後G検出値を補正して算出した前後G補正値に基づいて路面摩擦係数μ又は路面状態を推定する。これにより、例えば、各ホイールシリンダ62a〜62dのブレーキ液圧Pbが増圧しているにもかかわらず、車両10のピッチング(ここでは、車体の後ろ側が路面に近づく傾き変動)の影響で前後G検出値が減少した場合、当該ピッチングの影響をキャンセルすることが可能となる。
【0115】
或いは、全てのホイールシリンダ62a〜62dでブレーキ液圧Pbが増圧した後、一部のホイールシリンダ62a〜62dでブレーキ液圧Pbが減圧したにもかかわらず、車両10のピッチング(ここでは、車体の前側が路面に近づく傾き変動)の影響で前後G検出値が増加した場合、当該ピッチングの影響をキャンセルすることが可能となる。
【0116】
このため、前後G検出値が、車両10のピッチングの影響による誤差を含んだとしても、当該誤差をキャンセルすることが可能となる。従って、前後Gの検出精度及び路面推定の精度を向上することが可能となる。
【0117】
B.変形例
なお、この発明は、上記実施形態に限らず、この明細書、特許請求の範囲又は図面の記載内容に基づき、種々の構成を採り得ることはもちろんである。例えば、以下の構成を採用することができる。
【0118】
1.車両10
上記実施形態では、車両10は4輪車であったが、これに限られず、例えば、2輪車、トラック、バス等であってもよい。
【0119】
2.前後G補正値及び路面摩擦係数μの推定(前後G補正・μ推定機能110)
上記実施形態では、前後G検出値に基づく前後G補正値を利用して路面状態(低μ又は高μ)を判定したが、前後Gセンサ42の検出値(前後G検出値)をブレーキ液圧Pbの変化に応じて車両10のピッチングの影響を取り除く補正をした後、路面摩擦係数μ又は路面状態を推定するものであれば、これに限らない。例えば、前後G検出値に基づき前後G補正値を算出し、前後G補正値に基づき路面摩擦係数μを算出し、当該路面摩擦係数μを、低μ及び高μを判定するための閾値と比較して低μと高μを区別してもよい。或いは、前後G検出値に基づいて路面摩擦係数μを推定し、推定した路面摩擦係数μをブレーキ液圧Pbの変化に応じて補正をした後、補正後の路面摩擦係数μを、低μ及び高μを判定するための閾値と比較して低μと高μを区別してもよい。或いは、ブレーキ液圧Pbの変化に応じて閾値THG1を設定し、設定した閾値THG1を前後G補正値と比較することにより、低μと高μを区別することもできる。
【0120】
上記実施形態では、前後G補正値を独立制御の要否判定に用いたが、路面摩擦係数μ又は路面状態を用いる制御についてであれば、別の用途に用いることもできる。例えば、特許文献1のように、目標車輪速Vwtの演算に前後G補正値又は路面摩擦係数μを用いることもできる([0036]、[0037])。
【0121】
3.ABS制御(ABS機能112)
上記実施形態では、バルブモードの切替えの指標として目標車輪速度Vwtを用いたが、これに限らない。例えば、車体車速Vv若しくはその目標値、車輪速度Vw、ブレーキ液圧Pb若しくはその目標値又はスリップ率S若しくは目標スリップ率Stを用いてもよい。
【符号の説明】
【0122】
10…車両 12…制動力制御装置
18fl、18fr、18rl、18rr…車輪
22…ECU 42…前後加速度センサ
62a〜62d…ホイールシリンダ
110…前後G補正・μ推定機能(路面推定手段)
112…ABS機能(アンチロック制御手段)
【特許請求の範囲】
【請求項1】
前後加速度センサが検出した車両の前後加速度である前後加速度検出値に基づいて路面推定を行う路面推定手段と、
ホイールシリンダにかかるブレーキ液圧を増圧、減圧又は保持させることで、車輪のロックを防止するアンチロック制御手段と
を備える制動力制御装置であって、
前記路面推定手段は、アンチロック制御中に前記ブレーキ液圧が増圧又は増圧後保持となっている車輪の数に応じて前記前後加速度検出値を補正した前後加速度補正値に基づいて前記路面推定を行う
ことを特徴とする制動力制御装置。
【請求項2】
請求項1記載の制動力制御装置において、
全ての前記車輪が増圧又は増圧後保持となっているときに前記前後加速度検出値が減少している場合、減少前の前記前後加速度検出値を保持して前記前後加速度補正値とする
ことを特徴とする制動力制御装置。
【請求項3】
請求項1又は2記載の制動力制御装置において、
全ての前記車輪が増圧又は増圧後保持となった後、少なくとも1輪が減圧になったとき、前記前後加速度検出値を減少方向に補正して前記前後加速度補正値とする
ことを特徴とする制動力制御装置。
【請求項4】
請求項1又は2記載の制動力制御装置において、
全ての前記車輪が増圧又は増圧後保持となった後、少なくとも1輪が減圧となったとき、前記前後加速度検出値が減少している場合、前記前後加速度検出値の増加方向の補正を禁止する
ことを特徴とする制動力制御装置。
【請求項5】
請求項1〜4のいずれか1項に記載の制動力制御装置において、
さらに、前記車両の減速操作を判定する減速操作判定手段を有し、
前記減速操作が行われていないにもかかわらず、前記前後加速度検出値が増加した場合、前記前後加速度検出値の補正を禁止する
ことを特徴とする制動力制御装置。
【請求項6】
前後加速度センサが検出した車両の前後加速度である前後加速度検出値に基づいて路面摩擦係数又は路面状態を推定する路面推定手段と、
ホイールシリンダにかかるブレーキ液圧を増圧、減圧又は保持させることで、車輪のロックを防止するアンチロック制御を実行するアンチロック制御手段と
を備える制動力制御装置であって、
前記路面推定手段は、
各ホイールシリンダにおける前記ブレーキ液圧の変化に応じて前記前後加速度検出値を補正して前後加速度補正値を演算し、前記前後加速度補正値に基づいて前記路面摩擦係数若しくは前記路面状態を推定する、若しくは
前記前後加速度検出値に応じて算出した路面摩擦係数を、各ホイールシリンダにおける前記ブレーキ液圧の変化に応じて補正する、又は
前記路面状態を判定するための前記前後加速度検出値若しくは前記路面摩擦係数の閾値を各ホイールシリンダにおける前記ブレーキ液圧の変化に応じて設定する
ことを特徴とする制動力制御装置。
【請求項1】
前後加速度センサが検出した車両の前後加速度である前後加速度検出値に基づいて路面推定を行う路面推定手段と、
ホイールシリンダにかかるブレーキ液圧を増圧、減圧又は保持させることで、車輪のロックを防止するアンチロック制御手段と
を備える制動力制御装置であって、
前記路面推定手段は、アンチロック制御中に前記ブレーキ液圧が増圧又は増圧後保持となっている車輪の数に応じて前記前後加速度検出値を補正した前後加速度補正値に基づいて前記路面推定を行う
ことを特徴とする制動力制御装置。
【請求項2】
請求項1記載の制動力制御装置において、
全ての前記車輪が増圧又は増圧後保持となっているときに前記前後加速度検出値が減少している場合、減少前の前記前後加速度検出値を保持して前記前後加速度補正値とする
ことを特徴とする制動力制御装置。
【請求項3】
請求項1又は2記載の制動力制御装置において、
全ての前記車輪が増圧又は増圧後保持となった後、少なくとも1輪が減圧になったとき、前記前後加速度検出値を減少方向に補正して前記前後加速度補正値とする
ことを特徴とする制動力制御装置。
【請求項4】
請求項1又は2記載の制動力制御装置において、
全ての前記車輪が増圧又は増圧後保持となった後、少なくとも1輪が減圧となったとき、前記前後加速度検出値が減少している場合、前記前後加速度検出値の増加方向の補正を禁止する
ことを特徴とする制動力制御装置。
【請求項5】
請求項1〜4のいずれか1項に記載の制動力制御装置において、
さらに、前記車両の減速操作を判定する減速操作判定手段を有し、
前記減速操作が行われていないにもかかわらず、前記前後加速度検出値が増加した場合、前記前後加速度検出値の補正を禁止する
ことを特徴とする制動力制御装置。
【請求項6】
前後加速度センサが検出した車両の前後加速度である前後加速度検出値に基づいて路面摩擦係数又は路面状態を推定する路面推定手段と、
ホイールシリンダにかかるブレーキ液圧を増圧、減圧又は保持させることで、車輪のロックを防止するアンチロック制御を実行するアンチロック制御手段と
を備える制動力制御装置であって、
前記路面推定手段は、
各ホイールシリンダにおける前記ブレーキ液圧の変化に応じて前記前後加速度検出値を補正して前後加速度補正値を演算し、前記前後加速度補正値に基づいて前記路面摩擦係数若しくは前記路面状態を推定する、若しくは
前記前後加速度検出値に応じて算出した路面摩擦係数を、各ホイールシリンダにおける前記ブレーキ液圧の変化に応じて補正する、又は
前記路面状態を判定するための前記前後加速度検出値若しくは前記路面摩擦係数の閾値を各ホイールシリンダにおける前記ブレーキ液圧の変化に応じて設定する
ことを特徴とする制動力制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2013−28257(P2013−28257A)
【公開日】平成25年2月7日(2013.2.7)
【国際特許分類】
【出願番号】特願2011−165372(P2011−165372)
【出願日】平成23年7月28日(2011.7.28)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
【公開日】平成25年2月7日(2013.2.7)
【国際特許分類】
【出願日】平成23年7月28日(2011.7.28)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
[ Back to top ]