
制動灯制御装置
【課題】メンテナンス性を犠牲にせず、比較的安価な方法で後続車両のタイプ(高さ)にかかわらず視認性を良くして事故軽減を図ることのできる制動灯制御装置を提供する。
【解決手段】後続車両位置算出部11は、後続車両の位置を算出する。制御灯方向算出部14は、後続車両位置算出部11で算出された後続車両の位置に基づいて、制動灯17、19からみた後続車両の運転席の方向を算出する。制御部15は、制動灯17、19が出射する光の向きを、制動灯方向算出部14で算出された方向となるように命令する。制動灯偏向部16、18は、制御部15の命令に従って制動灯17、19が出射する光の方向を、制動灯方向算出部14で算出された後続車両の運転席の方向とする。これにより、比較的安価な方法で後続車両のタイプ(高さ)にかかわらず視認性を良くすることができ、事故軽減を図ることができる。
【解決手段】後続車両位置算出部11は、後続車両の位置を算出する。制御灯方向算出部14は、後続車両位置算出部11で算出された後続車両の位置に基づいて、制動灯17、19からみた後続車両の運転席の方向を算出する。制御部15は、制動灯17、19が出射する光の向きを、制動灯方向算出部14で算出された方向となるように命令する。制動灯偏向部16、18は、制御部15の命令に従って制動灯17、19が出射する光の方向を、制動灯方向算出部14で算出された後続車両の運転席の方向とする。これにより、比較的安価な方法で後続車両のタイプ(高さ)にかかわらず視認性を良くすることができ、事故軽減を図ることができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は制動灯制御装置に係り、特に自動車などの移動車両において、後続車両が確実に先行車両の制動状態が認識できるように制動灯を制御する制動灯制御装置に関する。
【背景技術】
【0002】
従来、特に後続車両が大型トラック等の大型車両であった場合、その運転席は乗用車の場合より遙かに高いので、前方を行く乗用車に近づくほど、乗用車のストップライト(制動灯)の視認性が落ち、追突事故を起こし易い。
【0003】
そのため、従来は乗用車の後部上側に補助灯(一般的にハイマウントストップライトと呼ばれる)を設置したり、また、特許文献1に記載されているように、乗用車の屋根に設置され、ブレーキをかけた時に車両後部のストップランプと同期して点灯する屋根設置ストップランプ装置により、後方から接近して来た車両が運転席の高い大型トラックでも視認されやすくしている。
【0004】
一方、自車両の制動灯が後続車両に眩惑感を与えることを防止すべく、後続車両の減速が検出された場合に、自車両の制動灯を減光制御する制動灯制御装置も提案されている(例えば、特許文献2参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】実用新案登録第3099318号公報
【特許文献2】特開2010−70114号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、これらの方法には以下の課題がある。
【0007】
すなわち、ハイマウントストップライトでは車高が低いタイプの車両では、後続車両への注意効果が薄く、例えばセダンタイプの車両では通常のストップライトの位置と変わらず全く効果がない。
【0008】
また、特許文献1記載の屋根設置ストップランプ装置は、防水性対策も含め大幅なコスト高になり、また屋根の上のストップランプに手が届きにくいため、整備点検時などのメンテナンス性が極端に悪くなるという問題がある。
【0009】
一方、特許文献2記載の制動灯制御装置では、ストップライトの光の減光制御を応用し、増光制御することで後続車両の注意を引くことも可能であるが、前述したように後続車両が大型車両であった場合の運転席は乗用車より遙かに高く、後続の大型車両の運転者に対して乗用車並みのストップライトの視認性を得るためには、極めて大きな増光が必要となり、このことは後続車が乗用車の場合逆に眩し過ぎることになり、かえって危険である。
【0010】
本発明は以上の点に鑑みなされたもので、メンテナンス性を犠牲にせず、比較的安価な方法で後続車両のタイプ(高さ)にかかわらず視認性を良くして事故軽減を図ることのできる制動灯制御装置を提供することを目的とする。
【課題を解決するための手段】
【0011】
上記の目的を達成するため、本発明は、後続車両の位置を算出する後続車両位置算出手段と、後続車両位置算出手段で算出された後続車両の位置に基づいて、制動灯からみた後続車両の運転席の方向を算出する制動灯方向算出手段と、制動灯が出射する光の向きを、制動灯方向算出手段で算出された方向となるように命令する制御手段と、制御手段の命令に従って制動灯が出射する光の方向を、制動灯方向算出手段で算出された後続車両の運転席の方向とする制動灯偏向手段とを有することを特徴とする。
【0012】
また、上記の目的を達成するため、本発明は、後続車両の位置を算出する後続車両位置算出手段と、後続車両位置算出手段で算出された後続車両の位置に基づいて、制動灯からみた後続車両の運転席の方向を算出する制動灯方向算出手段と、ブレーキペダルの踏む速度を測定する踏速度測定手段と、踏速度測定手段により測定された踏速度に基づいて、緊急制動であるかどうかを推定する制動状態推定手段と、制動状態推定手段により緊急制動であると推定された場合のみ、制動灯が出射する光の向きを制動灯方向算出手段で算出された後続車両の運転席の方向とし、制動状態推定手段により通常制動であると推定された場合は制動灯が出射する光の向きを所定の方向とするように命令する制御手段と、制御手段の命令に従って制動灯が出射する光の方向を偏向する制動灯偏向手段とを有することを特徴とする。
【発明の効果】
【0013】
本発明によれば、後続車両の運転席の位置を求め、制動灯から出射する光の向きを運転席に向けることにより、メンテナンス性を犠牲にせず、比較的安価な方法で後続車両のタイプ(高さ)にかかわらず視認性を良くすることができ、事故軽減を図ることができる。
【0014】
また、本発明によれば、制動灯から出射される光の向きを変える動作を緊急制動時のみ行うことにより、通常制動時に後続車両が緊急ブレーキをかけるリスクを低減することができる。
【図面の簡単な説明】
【0015】
【図1】本発明の制動灯制御装置の第1の実施の形態のブロック図である。
【図2】図1中の後続車両位置算出部の一例のブロック図と、その出射光と戻り光とを示す図である。
【図3】図2中の光偏光器の一例を示す構成図である。
【図4】図3に示す光偏向器側から見た光偏向器の光の走査例を示す図である。
【図5】図3に示す光偏向器によるレーザ光走査例を車両の横側及び上側から見た図である。
【図6】図1中の制動灯方向算出部による制動灯出射角度の算出例を示す図である。
【図7】図1に示す制動灯制御装置における車間距離の違いによる制動灯の偏向例を示す図である。
【図8】本発明の制動灯制御装置の第2の実施の形態のブロック図である。
【図9】図8に示す制動灯制御装置による制動灯の偏向例を示す図である。
【発明を実施するための形態】
【0016】
次に、本発明の実施の形態について図面を参照して説明する。
【0017】
(第1の実施の形態)
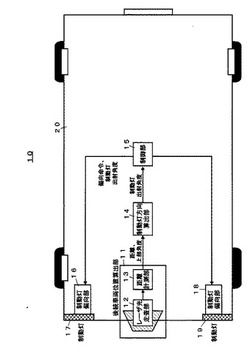
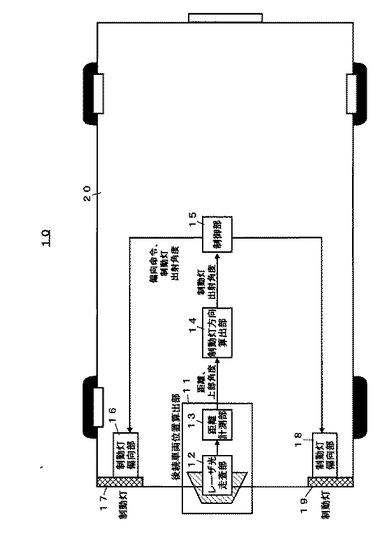
図1は、本発明になる制動灯制御装置の第1の実施の形態のブロック図を示す。同図において、本実施の形態の制動灯制御装置10は、後続車両位置算出部11、制動灯方向算出部14、制御部15、制動灯17に接続された制動灯偏向部16、及び制動灯19に接続された制動灯偏向部18から構成され、これらは車両20に搭載されている。
【0018】
後続車両位置算出部11は、車両20の後部からの後続車両の位置を算出する手段で、例えば図1に示すように車両20の後部に設置されており、レーザ光を後部車両めがけて2次元に走査させるレーザ光走査部12と、レーザ光走査により例えば位置情報として後部車両の前面の最上部の角度とそこまでの距離を計測する距離計測部13とからなる。
【0019】
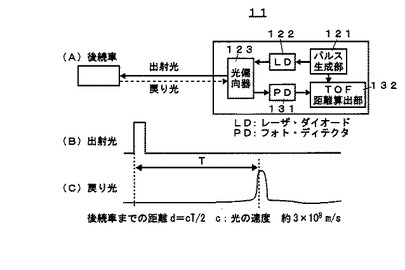
図2(A)は、後続車両位置算出部11の一例のブロック図を示す。図2(A)において、パルス生成部121、レーザ・ダイオード(LD)122及び光偏向器123が上記レーザ光走査部12を構成し、フォト・ディテクタ(PD)131及びTOF距離算出部132が上記距離計測部13を構成している。
【0020】
この後続車両位置算出部11では、パルス生成部121が生成するパルスに同期してLD122からレーザパルス光を発生させ、そのレーザパルス光を光偏光器123にあて、光偏光器123がそのレーザパルス光の照射方向を2次元走査させる。光偏光器123からの図2(B)に示す出射光(レーザパルス光)は、後続車にあたり反射する。その反射光の一部分が光偏光器123に図2(C)に示すような戻り光としてPD131で受光される。TOF距離算出部132は、出射光と戻り光とのパルス波の時間差(往復時間)Tを計測し、更にその計測値Tに光の速度cを掛け、得られた値の半分の値cT/2を片道即ち後続車両の反射地点までの距離dとして算出する(TOF法:Time Of Flight)。
【0021】
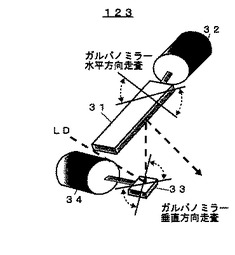
図3は、光偏向器123の一例の構成図を示す。同図において、光偏向器123は、水平方向走査用ガルバノミラー31と、垂直方向走査用ガルバノミラー33とを有し、それぞれ任意の角度分モータ32、34により交互に回転させて水平方向走査と垂直方向走査とを行う。
【0022】
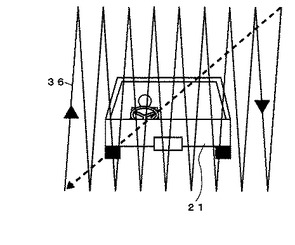
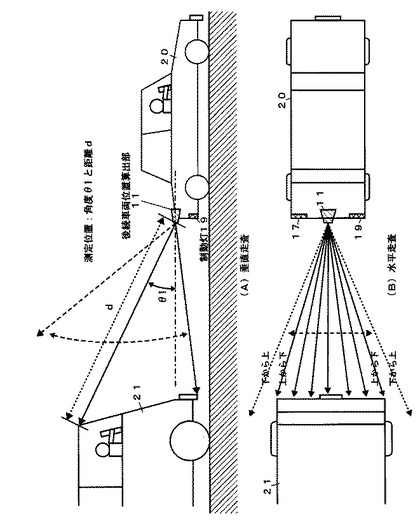
図4は、光偏向器123側から見た光偏向器123の光の走査例を示し、図5(A)及び(B)は、車両の横側及び上側から見た走査例を示す。図4に36で示すように、光偏向器123は、後続車21の前方正面めがけて光をジグザグ状に2次元走査する。また、車両20に搭載された後続車両位置算出部11内の光偏向器123は図5(A)に示すように、縦方向に光を連続走査させ、同図(B)に示すように、順次ジグザグ状に光を水平方向に走査する。
【0023】
図5(A)において、後続車両位置算出部11は、後続車両位置算出部11からの後続車両21の最上部と地面に水平方向の直線(一点鎖線で示す)との間の角度θ1とそのときの距離dをTOF方式で計測し、制動灯方向算出部14へ送る。特に図示しないが、例えば角度θ1はガルバノ用モータ32、34のFG(Frequency Generator)などをアップダウンカウントすれば容易に求めることができる。また、角度θ1は、例えば下から上への走査時は戻り光がないもしくは測定距離が極端に下がったところを使用する。
【0024】
なお、水平方向に複数回走査することで、後続車の位置が左右に寄っていたりしても計測することができる。また、複数のθ1と距離を求め、平均値をとったり、極端に測定値が異なるデータを除去したりするなど、外乱などによる測定ミスのリスクを小さくすることができる。なお、この例では後続車両位置算出部11としてレーザ光を使用したが、特にこれに限定しない。超音波やミリ波、もしくは発光ダイオード(LED)やカメラなどを使用してもよい。
【0025】
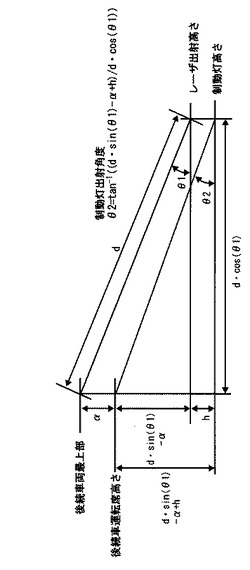
次に、制動灯方向算出部14による角度θ1と距離dとから制動灯17、19からの光の制動灯出射角度の算出方法について説明する。図6は、制動灯出射角度θ2の算出例を示す。この例では先行車両の制動灯の位置に対して高さh分だけ上側にレーザ光による後続車両位置算出部11が設置されているとする。また、後続車両の運転席の位置は、後続車両の最上部よりαだけ低いところにあるとすると、制動灯高さに対し、後続車両運転席の高さは、
d・sin(θ1)−α+h
である。また、後続車両までの水平距離は
d・cos(θ1)
である。従って、制動灯17、19からの光が後続車両の運転席に向かう制動灯出射角度θ2は、次式で表わされる。
【0026】
θ2=tan−1((d・sin(θ1)−α+h)/ d・cos(θ1)) (1)
ここで、後続車両位置算出部11(レーザ出射高さ)と制動灯17、19の取り付け高さが近ければ、h≒0であるので、これを(1)式に代入して、次式により制動灯出射角度θ2を簡単に計算できる。
【0027】
θ2=sin−1((d・sin(θ1)−α)/ d) (2)
なお、図示しないが、先行車両の制動灯17、19の位置に対して高さh分下側にレーザ光による後続車両位置算出部11が設置されていた場合は、次式により制動灯出射角度θ2を算出することができる。
【0028】
θ2=tan−1((d・sin(θ1)−α−h)/ d・cos(θ1)) (3)
制御部15は、制動灯方向算出部14により上記のように算出された制動灯からみた後続車両の運転席の方向を示す制動灯出射角度θ2を入力信号として受け、制動灯17、19から出射される光に、制動灯出射角度θ2分の角度を持たせるよう制動灯変更部16、18へ偏向命令を送る。制動灯偏向部16、18は、制御部15からの偏向命令に従い、制動灯17、19から出射される光を制動灯出射角度θ2だけ上向きにする。
【0029】
ここで、制動灯偏向部16、18は、制動灯17、19全体だけでなく、制動灯17、19のランプ部のみを偏向させたり、予め容易された複数の角度を持つランプの中で最も制動灯出射角度θ2に近い角度のランプを選択してもよい。また、制動灯17、19全体や制動灯17、19のランプ部のみを偏向させる方法としては、特に図示しないが、モータなどを使用すればよい。特にランプ単体を偏向するには低トルクなモータで十分であるので、価格を抑えることができる。また、ここではランプと表現したが、LED(発光ダイオード)を利用してもよい。
【0030】
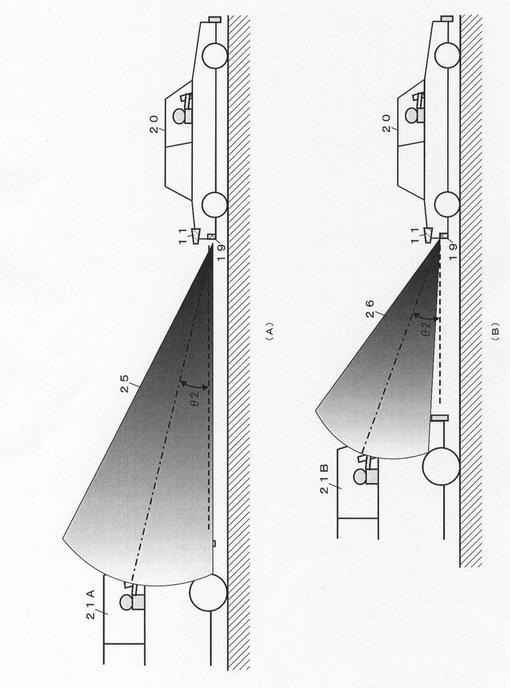
図7は、制動灯17、19から出射される光の様子を示す。制動灯17、19は、制動灯偏向部16、17により制動灯出射角度θ2だけ上向きに光を出射する。図7(A)、(B)に示す後続車両21は大型車の場合であり、図7(B)に示すように後続車両21Bが先行の車両20に対して同図(A)の後続車両21Aのときよりも近づくにつれ制動灯出射角度θ2は大きくなり、後続車両における視認性を確保することができる。
【0031】
このように、本実施の形態の制動灯制御装置10によれば、後続車両との距離と後続車両の高さを計測し、それより後続車両の運転席高さを推測し、制動灯17、19の光の向きを後続車両の運転席に向けることにより、別の補助灯を設置するのに対しメンテナンス性を犠牲にせず、比較的安価な方法で後続車両のタイプ(高さ)にかかわらず視認性を良くすることができ、事故軽減を図ることができる。
【0032】
(第2の実施の形態)
次に、本発明の第2の実施の形態について説明する。図8は、本発明になる制動灯制御装置の第2の実施の形態のブロック図を示す。同図中、図1と同一構成部分には同一符号を付し、その説明を省略する。
【0033】
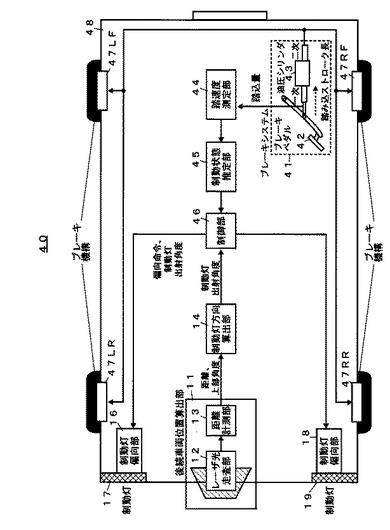
図8において、本実施の形態の制動灯制御装置40は、第1の実施の形態と同様構成の後続車両位置算出部11、制動灯方向算出部14及び制動灯偏向部16、18に加えて、ブレーキシステム41のブレーキペダル42の踏み込み速度を計測する踏速度計測部44と、制動状態推定部45、制御部46を備えた構成である。なお、47LF、47RF、47LR及び47RRは、ブレーキシステム41により制御されるブレーキ機構を示す。なお、これらは公知の構成である。
【0034】
踏速度計測部44は、ブレーキペダル42の踏み込み速度を計測する。その計測方法は限定しないが、例えばブレーキペダル42の踏み込みストローク量を一定時間周期で計測し、単位時間あたりの踏み込みストローク量を求めることにより踏み込み速度が計算できる。踏み込みストローク量はロータリエンコーダを使用すればよい。また、ブレーキペダル42に続く油圧シリンダ43の一次側に圧力センサなどを使用し、それを一定時間周期で計測してもよい。あるいは加速度センサを使用してその検出加速度値を積分して、その積分値を一定時間周期で計測してもよい。計測測定された踏み込み速度は、制動状態推定部45に送られる。
【0035】
制動状態推定部45は、踏速度計測部44により計測された踏み込み速度に基づいて、本実施の形態の制動灯制御装置40が搭載されている車両48が緊急制動(急制動)を掛けたかどうかを推定する。例えば、ある値のスレッシュホールドを持ち、それ以上の踏み込み速度であれば緊急制動、それ以下の踏み込み速度であれば通常の制動状態であると推定する。
【0036】
制御部46は、制動状態推定部45で緊急制動であると推定された場合のみ、制動灯方向算出部14により算出された制動灯出射角度を持たせるよう制動灯変更部16、18へ偏向命令を送る。制動灯偏向部16、18は、その命令に従い緊急制動状態のみ制動灯17、19が出射する光を、算出された制動灯出射角度分だけ偏向する。
【0037】
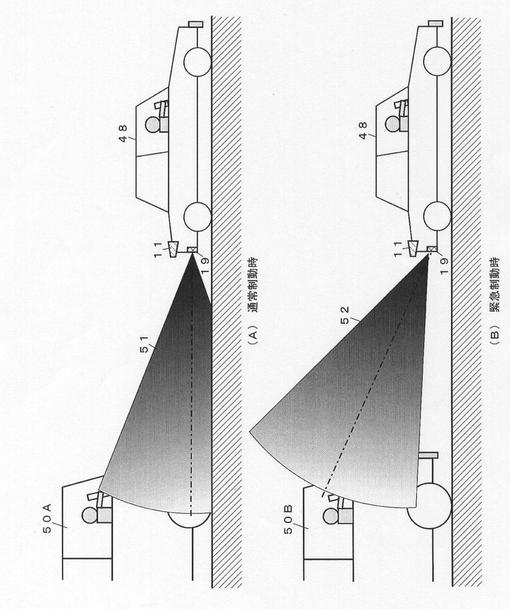
図9は、本実施の形態により制動灯17、19から出射される光の様子を示す。制動灯17、19は、制動状態推定部45で緊急制動であると推定された場合のみ、制動灯変更部16、18により図9(B)に52で示すように、制動灯17、19が出射する光を算出された制動灯出射角度分だけ偏向することで、制動灯17、19が出射する光が後続車両50Bの運転席方向に向く。上記の算出された制動灯出射角度は、前述したように後続車両の運転席の位置に対応しているからである。
【0038】
一方、制動灯17、19は、制動状態推定部45で緊急制動でない(通常制動である)と推定された場合には、制動灯変更部16、18により図9(A)に51で示すように、制動灯17、19が出射する光を予め設定されている光の方向である後続車両50Aの運転席よりも下方向に向ける。
【0039】
このように、本実施の形態の制動灯制御装置40によれば、先行車両48の緊急制動の場合のみ制動灯17、19からの光の向きが後続車両50Bの運手者の方を向くようしたことで、別の補助灯を設置するのに対しメンテナンス性を犠牲にせず、比較的安価な方法で緊急制動時の後続車両の視認性を良くして事故軽減を図ることができる。また、先行車両48の通常制動の際は、制動灯17、19からの光の向きが後続車両50Bの運手者の方を向かないようにすることで、後続車両50Aの運転手が慌てて緊急制動してしまうというリスクを低減することができる。
【0040】
なお、特に図示しないが、従来停車時近くにおいて後続車両の接近状態に応じて制動灯の光を減光制御することが行われていたが、本発明においても、制御部においてスピードメータからの速度計測値を取り込み、通常制動時、かつ、停車時近くであることを判断したときには制動灯偏向部16、18に対し、制動灯17、19からの光が下を向くように偏向制御することにより、減光制御を実現できる。
【符号の説明】
【0041】
10、40 制動灯制御装置
11 後続車両位置算出部
12 レーザ光走査部
13 距離計測部
14 制動灯方向算出部
15、46 制御部
16、18 制動灯偏向部
17、19 制動灯
20、48 車両
21A、21B、50A、50B 後続車両
31 水平方向走査用ガルバノミラー
33 垂直方向走査用ガルバノミラー
41 ブレーキシステム
44 踏速度測定部
45 制動状態推定部
121 パルス生成部
122 レーザ・ダイオード(LD)
123 光偏向器
131 フォト・ダイオード(PD)
132 TOF距離算出部
【技術分野】
【0001】
本発明は制動灯制御装置に係り、特に自動車などの移動車両において、後続車両が確実に先行車両の制動状態が認識できるように制動灯を制御する制動灯制御装置に関する。
【背景技術】
【0002】
従来、特に後続車両が大型トラック等の大型車両であった場合、その運転席は乗用車の場合より遙かに高いので、前方を行く乗用車に近づくほど、乗用車のストップライト(制動灯)の視認性が落ち、追突事故を起こし易い。
【0003】
そのため、従来は乗用車の後部上側に補助灯(一般的にハイマウントストップライトと呼ばれる)を設置したり、また、特許文献1に記載されているように、乗用車の屋根に設置され、ブレーキをかけた時に車両後部のストップランプと同期して点灯する屋根設置ストップランプ装置により、後方から接近して来た車両が運転席の高い大型トラックでも視認されやすくしている。
【0004】
一方、自車両の制動灯が後続車両に眩惑感を与えることを防止すべく、後続車両の減速が検出された場合に、自車両の制動灯を減光制御する制動灯制御装置も提案されている(例えば、特許文献2参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】実用新案登録第3099318号公報
【特許文献2】特開2010−70114号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、これらの方法には以下の課題がある。
【0007】
すなわち、ハイマウントストップライトでは車高が低いタイプの車両では、後続車両への注意効果が薄く、例えばセダンタイプの車両では通常のストップライトの位置と変わらず全く効果がない。
【0008】
また、特許文献1記載の屋根設置ストップランプ装置は、防水性対策も含め大幅なコスト高になり、また屋根の上のストップランプに手が届きにくいため、整備点検時などのメンテナンス性が極端に悪くなるという問題がある。
【0009】
一方、特許文献2記載の制動灯制御装置では、ストップライトの光の減光制御を応用し、増光制御することで後続車両の注意を引くことも可能であるが、前述したように後続車両が大型車両であった場合の運転席は乗用車より遙かに高く、後続の大型車両の運転者に対して乗用車並みのストップライトの視認性を得るためには、極めて大きな増光が必要となり、このことは後続車が乗用車の場合逆に眩し過ぎることになり、かえって危険である。
【0010】
本発明は以上の点に鑑みなされたもので、メンテナンス性を犠牲にせず、比較的安価な方法で後続車両のタイプ(高さ)にかかわらず視認性を良くして事故軽減を図ることのできる制動灯制御装置を提供することを目的とする。
【課題を解決するための手段】
【0011】
上記の目的を達成するため、本発明は、後続車両の位置を算出する後続車両位置算出手段と、後続車両位置算出手段で算出された後続車両の位置に基づいて、制動灯からみた後続車両の運転席の方向を算出する制動灯方向算出手段と、制動灯が出射する光の向きを、制動灯方向算出手段で算出された方向となるように命令する制御手段と、制御手段の命令に従って制動灯が出射する光の方向を、制動灯方向算出手段で算出された後続車両の運転席の方向とする制動灯偏向手段とを有することを特徴とする。
【0012】
また、上記の目的を達成するため、本発明は、後続車両の位置を算出する後続車両位置算出手段と、後続車両位置算出手段で算出された後続車両の位置に基づいて、制動灯からみた後続車両の運転席の方向を算出する制動灯方向算出手段と、ブレーキペダルの踏む速度を測定する踏速度測定手段と、踏速度測定手段により測定された踏速度に基づいて、緊急制動であるかどうかを推定する制動状態推定手段と、制動状態推定手段により緊急制動であると推定された場合のみ、制動灯が出射する光の向きを制動灯方向算出手段で算出された後続車両の運転席の方向とし、制動状態推定手段により通常制動であると推定された場合は制動灯が出射する光の向きを所定の方向とするように命令する制御手段と、制御手段の命令に従って制動灯が出射する光の方向を偏向する制動灯偏向手段とを有することを特徴とする。
【発明の効果】
【0013】
本発明によれば、後続車両の運転席の位置を求め、制動灯から出射する光の向きを運転席に向けることにより、メンテナンス性を犠牲にせず、比較的安価な方法で後続車両のタイプ(高さ)にかかわらず視認性を良くすることができ、事故軽減を図ることができる。
【0014】
また、本発明によれば、制動灯から出射される光の向きを変える動作を緊急制動時のみ行うことにより、通常制動時に後続車両が緊急ブレーキをかけるリスクを低減することができる。
【図面の簡単な説明】
【0015】
【図1】本発明の制動灯制御装置の第1の実施の形態のブロック図である。
【図2】図1中の後続車両位置算出部の一例のブロック図と、その出射光と戻り光とを示す図である。
【図3】図2中の光偏光器の一例を示す構成図である。
【図4】図3に示す光偏向器側から見た光偏向器の光の走査例を示す図である。
【図5】図3に示す光偏向器によるレーザ光走査例を車両の横側及び上側から見た図である。
【図6】図1中の制動灯方向算出部による制動灯出射角度の算出例を示す図である。
【図7】図1に示す制動灯制御装置における車間距離の違いによる制動灯の偏向例を示す図である。
【図8】本発明の制動灯制御装置の第2の実施の形態のブロック図である。
【図9】図8に示す制動灯制御装置による制動灯の偏向例を示す図である。
【発明を実施するための形態】
【0016】
次に、本発明の実施の形態について図面を参照して説明する。
【0017】
(第1の実施の形態)
図1は、本発明になる制動灯制御装置の第1の実施の形態のブロック図を示す。同図において、本実施の形態の制動灯制御装置10は、後続車両位置算出部11、制動灯方向算出部14、制御部15、制動灯17に接続された制動灯偏向部16、及び制動灯19に接続された制動灯偏向部18から構成され、これらは車両20に搭載されている。
【0018】
後続車両位置算出部11は、車両20の後部からの後続車両の位置を算出する手段で、例えば図1に示すように車両20の後部に設置されており、レーザ光を後部車両めがけて2次元に走査させるレーザ光走査部12と、レーザ光走査により例えば位置情報として後部車両の前面の最上部の角度とそこまでの距離を計測する距離計測部13とからなる。
【0019】
図2(A)は、後続車両位置算出部11の一例のブロック図を示す。図2(A)において、パルス生成部121、レーザ・ダイオード(LD)122及び光偏向器123が上記レーザ光走査部12を構成し、フォト・ディテクタ(PD)131及びTOF距離算出部132が上記距離計測部13を構成している。
【0020】
この後続車両位置算出部11では、パルス生成部121が生成するパルスに同期してLD122からレーザパルス光を発生させ、そのレーザパルス光を光偏光器123にあて、光偏光器123がそのレーザパルス光の照射方向を2次元走査させる。光偏光器123からの図2(B)に示す出射光(レーザパルス光)は、後続車にあたり反射する。その反射光の一部分が光偏光器123に図2(C)に示すような戻り光としてPD131で受光される。TOF距離算出部132は、出射光と戻り光とのパルス波の時間差(往復時間)Tを計測し、更にその計測値Tに光の速度cを掛け、得られた値の半分の値cT/2を片道即ち後続車両の反射地点までの距離dとして算出する(TOF法:Time Of Flight)。
【0021】
図3は、光偏向器123の一例の構成図を示す。同図において、光偏向器123は、水平方向走査用ガルバノミラー31と、垂直方向走査用ガルバノミラー33とを有し、それぞれ任意の角度分モータ32、34により交互に回転させて水平方向走査と垂直方向走査とを行う。
【0022】
図4は、光偏向器123側から見た光偏向器123の光の走査例を示し、図5(A)及び(B)は、車両の横側及び上側から見た走査例を示す。図4に36で示すように、光偏向器123は、後続車21の前方正面めがけて光をジグザグ状に2次元走査する。また、車両20に搭載された後続車両位置算出部11内の光偏向器123は図5(A)に示すように、縦方向に光を連続走査させ、同図(B)に示すように、順次ジグザグ状に光を水平方向に走査する。
【0023】
図5(A)において、後続車両位置算出部11は、後続車両位置算出部11からの後続車両21の最上部と地面に水平方向の直線(一点鎖線で示す)との間の角度θ1とそのときの距離dをTOF方式で計測し、制動灯方向算出部14へ送る。特に図示しないが、例えば角度θ1はガルバノ用モータ32、34のFG(Frequency Generator)などをアップダウンカウントすれば容易に求めることができる。また、角度θ1は、例えば下から上への走査時は戻り光がないもしくは測定距離が極端に下がったところを使用する。
【0024】
なお、水平方向に複数回走査することで、後続車の位置が左右に寄っていたりしても計測することができる。また、複数のθ1と距離を求め、平均値をとったり、極端に測定値が異なるデータを除去したりするなど、外乱などによる測定ミスのリスクを小さくすることができる。なお、この例では後続車両位置算出部11としてレーザ光を使用したが、特にこれに限定しない。超音波やミリ波、もしくは発光ダイオード(LED)やカメラなどを使用してもよい。
【0025】
次に、制動灯方向算出部14による角度θ1と距離dとから制動灯17、19からの光の制動灯出射角度の算出方法について説明する。図6は、制動灯出射角度θ2の算出例を示す。この例では先行車両の制動灯の位置に対して高さh分だけ上側にレーザ光による後続車両位置算出部11が設置されているとする。また、後続車両の運転席の位置は、後続車両の最上部よりαだけ低いところにあるとすると、制動灯高さに対し、後続車両運転席の高さは、
d・sin(θ1)−α+h
である。また、後続車両までの水平距離は
d・cos(θ1)
である。従って、制動灯17、19からの光が後続車両の運転席に向かう制動灯出射角度θ2は、次式で表わされる。
【0026】
θ2=tan−1((d・sin(θ1)−α+h)/ d・cos(θ1)) (1)
ここで、後続車両位置算出部11(レーザ出射高さ)と制動灯17、19の取り付け高さが近ければ、h≒0であるので、これを(1)式に代入して、次式により制動灯出射角度θ2を簡単に計算できる。
【0027】
θ2=sin−1((d・sin(θ1)−α)/ d) (2)
なお、図示しないが、先行車両の制動灯17、19の位置に対して高さh分下側にレーザ光による後続車両位置算出部11が設置されていた場合は、次式により制動灯出射角度θ2を算出することができる。
【0028】
θ2=tan−1((d・sin(θ1)−α−h)/ d・cos(θ1)) (3)
制御部15は、制動灯方向算出部14により上記のように算出された制動灯からみた後続車両の運転席の方向を示す制動灯出射角度θ2を入力信号として受け、制動灯17、19から出射される光に、制動灯出射角度θ2分の角度を持たせるよう制動灯変更部16、18へ偏向命令を送る。制動灯偏向部16、18は、制御部15からの偏向命令に従い、制動灯17、19から出射される光を制動灯出射角度θ2だけ上向きにする。
【0029】
ここで、制動灯偏向部16、18は、制動灯17、19全体だけでなく、制動灯17、19のランプ部のみを偏向させたり、予め容易された複数の角度を持つランプの中で最も制動灯出射角度θ2に近い角度のランプを選択してもよい。また、制動灯17、19全体や制動灯17、19のランプ部のみを偏向させる方法としては、特に図示しないが、モータなどを使用すればよい。特にランプ単体を偏向するには低トルクなモータで十分であるので、価格を抑えることができる。また、ここではランプと表現したが、LED(発光ダイオード)を利用してもよい。
【0030】
図7は、制動灯17、19から出射される光の様子を示す。制動灯17、19は、制動灯偏向部16、17により制動灯出射角度θ2だけ上向きに光を出射する。図7(A)、(B)に示す後続車両21は大型車の場合であり、図7(B)に示すように後続車両21Bが先行の車両20に対して同図(A)の後続車両21Aのときよりも近づくにつれ制動灯出射角度θ2は大きくなり、後続車両における視認性を確保することができる。
【0031】
このように、本実施の形態の制動灯制御装置10によれば、後続車両との距離と後続車両の高さを計測し、それより後続車両の運転席高さを推測し、制動灯17、19の光の向きを後続車両の運転席に向けることにより、別の補助灯を設置するのに対しメンテナンス性を犠牲にせず、比較的安価な方法で後続車両のタイプ(高さ)にかかわらず視認性を良くすることができ、事故軽減を図ることができる。
【0032】
(第2の実施の形態)
次に、本発明の第2の実施の形態について説明する。図8は、本発明になる制動灯制御装置の第2の実施の形態のブロック図を示す。同図中、図1と同一構成部分には同一符号を付し、その説明を省略する。
【0033】
図8において、本実施の形態の制動灯制御装置40は、第1の実施の形態と同様構成の後続車両位置算出部11、制動灯方向算出部14及び制動灯偏向部16、18に加えて、ブレーキシステム41のブレーキペダル42の踏み込み速度を計測する踏速度計測部44と、制動状態推定部45、制御部46を備えた構成である。なお、47LF、47RF、47LR及び47RRは、ブレーキシステム41により制御されるブレーキ機構を示す。なお、これらは公知の構成である。
【0034】
踏速度計測部44は、ブレーキペダル42の踏み込み速度を計測する。その計測方法は限定しないが、例えばブレーキペダル42の踏み込みストローク量を一定時間周期で計測し、単位時間あたりの踏み込みストローク量を求めることにより踏み込み速度が計算できる。踏み込みストローク量はロータリエンコーダを使用すればよい。また、ブレーキペダル42に続く油圧シリンダ43の一次側に圧力センサなどを使用し、それを一定時間周期で計測してもよい。あるいは加速度センサを使用してその検出加速度値を積分して、その積分値を一定時間周期で計測してもよい。計測測定された踏み込み速度は、制動状態推定部45に送られる。
【0035】
制動状態推定部45は、踏速度計測部44により計測された踏み込み速度に基づいて、本実施の形態の制動灯制御装置40が搭載されている車両48が緊急制動(急制動)を掛けたかどうかを推定する。例えば、ある値のスレッシュホールドを持ち、それ以上の踏み込み速度であれば緊急制動、それ以下の踏み込み速度であれば通常の制動状態であると推定する。
【0036】
制御部46は、制動状態推定部45で緊急制動であると推定された場合のみ、制動灯方向算出部14により算出された制動灯出射角度を持たせるよう制動灯変更部16、18へ偏向命令を送る。制動灯偏向部16、18は、その命令に従い緊急制動状態のみ制動灯17、19が出射する光を、算出された制動灯出射角度分だけ偏向する。
【0037】
図9は、本実施の形態により制動灯17、19から出射される光の様子を示す。制動灯17、19は、制動状態推定部45で緊急制動であると推定された場合のみ、制動灯変更部16、18により図9(B)に52で示すように、制動灯17、19が出射する光を算出された制動灯出射角度分だけ偏向することで、制動灯17、19が出射する光が後続車両50Bの運転席方向に向く。上記の算出された制動灯出射角度は、前述したように後続車両の運転席の位置に対応しているからである。
【0038】
一方、制動灯17、19は、制動状態推定部45で緊急制動でない(通常制動である)と推定された場合には、制動灯変更部16、18により図9(A)に51で示すように、制動灯17、19が出射する光を予め設定されている光の方向である後続車両50Aの運転席よりも下方向に向ける。
【0039】
このように、本実施の形態の制動灯制御装置40によれば、先行車両48の緊急制動の場合のみ制動灯17、19からの光の向きが後続車両50Bの運手者の方を向くようしたことで、別の補助灯を設置するのに対しメンテナンス性を犠牲にせず、比較的安価な方法で緊急制動時の後続車両の視認性を良くして事故軽減を図ることができる。また、先行車両48の通常制動の際は、制動灯17、19からの光の向きが後続車両50Bの運手者の方を向かないようにすることで、後続車両50Aの運転手が慌てて緊急制動してしまうというリスクを低減することができる。
【0040】
なお、特に図示しないが、従来停車時近くにおいて後続車両の接近状態に応じて制動灯の光を減光制御することが行われていたが、本発明においても、制御部においてスピードメータからの速度計測値を取り込み、通常制動時、かつ、停車時近くであることを判断したときには制動灯偏向部16、18に対し、制動灯17、19からの光が下を向くように偏向制御することにより、減光制御を実現できる。
【符号の説明】
【0041】
10、40 制動灯制御装置
11 後続車両位置算出部
12 レーザ光走査部
13 距離計測部
14 制動灯方向算出部
15、46 制御部
16、18 制動灯偏向部
17、19 制動灯
20、48 車両
21A、21B、50A、50B 後続車両
31 水平方向走査用ガルバノミラー
33 垂直方向走査用ガルバノミラー
41 ブレーキシステム
44 踏速度測定部
45 制動状態推定部
121 パルス生成部
122 レーザ・ダイオード(LD)
123 光偏向器
131 フォト・ダイオード(PD)
132 TOF距離算出部
【特許請求の範囲】
【請求項1】
後続車両の位置を算出する後続車両位置算出手段と、
前記後続車両位置算出手段で算出された後続車両の位置に基づいて、制動灯からみた前記後続車両の運転席の方向を算出する制動灯方向算出手段と、
前記制動灯が出射する光の向きを、前記制動灯方向算出手段で算出された方向となるように命令する制御手段と、
前記制御手段の命令に従って前記制動灯が出射する光の方向を、前記制動灯方向算出手段で算出された前記後続車両の運転席の方向とする制動灯偏向手段と
を有することを特徴とする制動灯制御装置。
【請求項2】
後続車両の位置を算出する後続車両位置算出手段と、
前記後続車両位置算出手段で算出された後続車両の位置に基づいて、制動灯からみた前記後続車両の運転席の方向を算出する制動灯方向算出手段と、
ブレーキペダルの踏む速度を測定する踏速度測定手段と、
前記踏速度測定手段により測定された踏速度に基づいて、緊急制動であるかどうかを推定する制動状態推定手段と、
前記制動状態推定手段により緊急制動であると推定された場合のみ、前記制動灯が出射する光の向きを前記制動灯方向算出手段で算出された前記後続車両の運転席の方向とし、前記制動状態推定手段により通常制動であると推定された場合は前記制動灯が出射する光の向きを所定の方向とするように命令する制御手段と、
前記制御手段の命令に従って前記制動灯が出射する光の方向を偏向する制動灯偏向手段と
を有することを特徴とする制動灯制御装置。
【請求項1】
後続車両の位置を算出する後続車両位置算出手段と、
前記後続車両位置算出手段で算出された後続車両の位置に基づいて、制動灯からみた前記後続車両の運転席の方向を算出する制動灯方向算出手段と、
前記制動灯が出射する光の向きを、前記制動灯方向算出手段で算出された方向となるように命令する制御手段と、
前記制御手段の命令に従って前記制動灯が出射する光の方向を、前記制動灯方向算出手段で算出された前記後続車両の運転席の方向とする制動灯偏向手段と
を有することを特徴とする制動灯制御装置。
【請求項2】
後続車両の位置を算出する後続車両位置算出手段と、
前記後続車両位置算出手段で算出された後続車両の位置に基づいて、制動灯からみた前記後続車両の運転席の方向を算出する制動灯方向算出手段と、
ブレーキペダルの踏む速度を測定する踏速度測定手段と、
前記踏速度測定手段により測定された踏速度に基づいて、緊急制動であるかどうかを推定する制動状態推定手段と、
前記制動状態推定手段により緊急制動であると推定された場合のみ、前記制動灯が出射する光の向きを前記制動灯方向算出手段で算出された前記後続車両の運転席の方向とし、前記制動状態推定手段により通常制動であると推定された場合は前記制動灯が出射する光の向きを所定の方向とするように命令する制御手段と、
前記制御手段の命令に従って前記制動灯が出射する光の方向を偏向する制動灯偏向手段と
を有することを特徴とする制動灯制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図8】
【図7】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図8】
【図7】
【図9】
【公開番号】特開2012−121351(P2012−121351A)
【公開日】平成24年6月28日(2012.6.28)
【国際特許分類】
【出願番号】特願2010−271353(P2010−271353)
【出願日】平成22年12月6日(2010.12.6)
【出願人】(308036402)株式会社JVCケンウッド (1,152)
【Fターム(参考)】
【公開日】平成24年6月28日(2012.6.28)
【国際特許分類】
【出願日】平成22年12月6日(2010.12.6)
【出願人】(308036402)株式会社JVCケンウッド (1,152)
【Fターム(参考)】
[ Back to top ]