
制動装置摩耗測定
【課題】制動装置摩耗、特に常用および駐車制動装置組立体の一部分を形成し、電気モータにより駆動される湿式制動装置の円板の摩耗を決定する新規の方法を提供すること。
【解決手段】終減速装置組立体は、電気モータによって駆動され、駐車および常用制動装置を含み、駐車および常用制動装置は、駐車制動装置ピストンに送られる流体を起動する圧縮制動装置なしに、係合駐車制動装置状態を形成するベレビルばねのスタックにより規定される圧縮ばね装置によって印加される予荷重により圧縮される共有制動装置円板束を含む。予荷重量をベレビルばねのスタックの様々な圧縮高さに相関させる情報を含む、ベレビルばねのスタックの記憶された荷重曲線と、静止円板に対して係合制動装置円板束の回転円板を摺動させるのに十分なトルクを発生させる電気モータに送出される駆動信号の大きさとに基づいて、制動装置円板束の摩耗を計算する電気制御装置が提供される。
【解決手段】終減速装置組立体は、電気モータによって駆動され、駐車および常用制動装置を含み、駐車および常用制動装置は、駐車制動装置ピストンに送られる流体を起動する圧縮制動装置なしに、係合駐車制動装置状態を形成するベレビルばねのスタックにより規定される圧縮ばね装置によって印加される予荷重により圧縮される共有制動装置円板束を含む。予荷重量をベレビルばねのスタックの様々な圧縮高さに相関させる情報を含む、ベレビルばねのスタックの記憶された荷重曲線と、静止円板に対して係合制動装置円板束の回転円板を摺動させるのに十分なトルクを発生させる電気モータに送出される駆動信号の大きさとに基づいて、制動装置円板束の摩耗を計算する電気制御装置が提供される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両常用および駐車制動装置に関し、より具体的には、電気モータにより駆動される入力駆動軸を含む終減速組立体内で具体化される常用および駐車制動装置組立体の制動装置円板束の制動装置摩耗を示すデバイスに関する。
【背景技術】
【0002】
多くの種類の機械および車両の定期点検は、制動装置の状態、具体的には制動装置の一部分を形成する制動装置パッドまたは制動装置円板の摩耗を検査するステップを含む。制動装置の摩耗を測定する良い方法に到達するために、設計者により多くの努力がなされてきた。それに加えて、駐車制動装置の定期的な性能検査を義務付けている、いくつかの区域に規制がある。
【0003】
特に減速歯車装置を具体化する終減速機構を有する建設機械に使用される湿式制動装置における課題は、制動装置が終減速歯車装置、車輪駆動ハブ、および主軸すなわち回転軸の内側の場所に収容されるため、視覚的または機械的に摩耗量を検査するのが難しいことである。駐車制動装置の信頼性を判定する試験は、定期的なものとなるが、ほとんどが、故障を発生させる条件が是正されるまで機械が停止されることが必要な故障を含む合否判定の種類の試験であるという欠点を有する。
【0004】
制動装置組立体の分解を必要とすることなく、産業用および悪路用車両の車輪を制動するのに使用される駐車および常用制動装置組立体の一部分を形成する制動装置円板束の摩耗を監視することが知られている。この監視は、深さゲージを使用して行われ、制動装置円板束が新しいときに制動装置円板束に係合し、この測定値を制動装置円板束の供用寿命中に作成される後の測定値と比較するのに必要な制動装置ピストンの運動を測定する。2つの測定値間の差が特定の摩耗制限値内であるとき、制動装置円板束は、交換される必要はないが、その差が摩耗制限値を上回るとき、新しい円板が必要とされる。そのような制動装置監視装置は、1980年2月5日に発行された米国特許第4,186,822号に開示される。制動装置円板束の係合に影響を及ぼす制動装置ピストンを、その運動の手動測定を可能にするために接近可能となるように配置する必要があり、したがって、駐車および常用制動装置組立体が終減速装置と共に使用されるときに配置することができる場所に関する設計制限があるという欠点を、この摩耗測定装置は有する。この摩耗測定は、作業員が台を取り外し、手動で測定を行う必要があり、そのことが時間の浪費になるという欠点をさらに有する。
【0005】
車両車輪制動装置円板束の摩耗を監視する別の既知の方法は、被制動要素からの取付距離を測定する、1つまたは複数の制動装置ライニングサポート上に取り付けられる距離検知器から摩耗値出力信号を受け取る電気制御装置を使用することである。この電気制御装置は、測定摩耗値が比較される許容摩耗値を記憶装置内に有し、測定摩耗値が許容摩耗値と等しくなると、制御装置が警報を発する。測定摩耗値は、摩耗指示装置内に示すこともできる。摩耗を測定する直接的でない方法は、制動装置ライニング温度、制動装置ライニング厚さ、および制動装置トルク制御装置に供給される電気信号の強さを相互に関連付ける、電気制御装置の記憶装置内の特性の一群を記憶することによるものである。特性のこの記憶された一群に基づいて、電気制御装置は、制動装置トルク制御装置に供給される信号の強さ、および示される制動装置ライニング温度から摩耗値信号を形成し、この摩耗値信号は、厚さ、したがって制動装置ライニングの摩耗を特徴付ける。したがって、ある意味で、温度検知器は、摩耗値伝送機でもあり、伝送される摩耗値信号は、必要に応じて、ある尺度の読取値に変換される。米国特許第4,790,606号は、そのような摩耗監視装置を開示する。
【0006】
減速装置のトルク発生能力が発生する制動トルクを打ち消すのに十分大きい装置における車両車輪制動装置の完全性を判定することも知られている。この装置では、最初に制動装置が適用され、次いで十分なトルクが駆動軸に印加され、制動装置を摺動させて、駆動軸が所定の回転距離たとえばその軸の周りに1回転だけ回転するようにする。制動装置の摺動は、制動装置プレートとリアクションプレートとの間の相対運動を起こす。この相対運動は、制動装置適用部材とリアクションプレートとの間に制動トルクを発生させ、相対運動は、測定され、参照値と比較されて制動装置の機能的な完全性を検証する。米国特許第5,785,158号は、そのような制動装置完全性監視器を開示する。制動装置の完全性を検査するこの方法は、制動装置適用部材とリアクションプレートとの間の相対回転を決定する検知装置が必要であり、そのことが終減速装置に追加費用を付加するという欠点を有する。
【0007】
その際、所望されるものは、制動装置円板束を視覚的または機械的に検査するのが難しい場所の電気モータ駆動終減速装置内で具体化される車両常用および駐車制動装置の制動装置円板束の摩耗を確実および経済的に測定することができ、制動装置故障を避けるために制動装置を点検する必要性を顧客に警告するように制動装置故障を予測することができる、ある方法である。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】米国特許第4,186,822号
【特許文献2】米国特許第4,790,606号
【特許文献3】米国特許第5,785,158号
【非特許文献】
【0009】
【非特許文献1】ISO3405/MSHA
【発明の概要】
【発明が解決しようとする課題】
【0010】
本発明によれば、制動装置摩耗、特に常用および駐車制動装置組立体の一部分を形成し、電気モータにより駆動される湿式制動装置の円板の摩耗を決定する新規の方法が提供される。
【0011】
本発明の目的は、ばね係合駐車制動装置の摩耗した制動装置円板束を摺動させるのに必要な解放トルクと、新しい制動装置円板束を摺動させるのに必要な解放トルクとを比較し、これらのトルクは、終減速装置の電気駆動モータの出力軸を回転させるのに送出される指令信号により決定されるが、制動装置に適用するばね装置の予荷重の対応する損失を決定し、新しい制動装置円板束状態および摩耗した制動装置円板束状態に存在するばね装置の長さの差を決定し、長さのこの差から制動装置円板の摩耗を決定することにより、終減速装置制動装置の摩耗を決定することである。
【課題を解決するための手段】
【0012】
上述の目的は、制動装置束をその係合状態に付勢するのに使用されるばね装置に関する荷重曲線を供給することにより達成され、この荷重曲線は、制動装置に適用するばね装置の長さの関数としてばね装置により印加される予荷重を打点し、電気制御装置の記憶装置内にこの荷重曲線を記憶し、次いで摺動が起こる時間にモータに送出される指令信号の関数として制動装置束の回転円板と静止円板との間の摺動を起こすのに必要な解放トルクを決定し、計算したこのトルクを使用して、解放トルクに対応する、ばね装置により印加された荷重を決定し、次いでこの荷重を使用して、試験の時点に存在するばね装置長さに達する記憶された荷重曲線に入り、この長さは、新しい制動装置スタックのばね装置の記憶された長さと比較され、制動装置円板の摩耗量を導くようにする。本発明の開示では、制動装置は、ベレビルばねの2×6スタックを含む。この摩耗量は、必要に応じて、作業員に表示され、記憶装置内に記憶された許容摩耗量と比較され、測定摩耗量が許容摩耗量と等しいとき、作業員に警告する信号が提供される。
【0013】
したがって、摺動が円板束内で起こる時点にモータに送出される指令信号から解放トルク値を容易に引き出す電気制御装置の能力により、他のあらゆる測定装置を必要とすることなく、解放トルクを決定することができることが理解されよう。
【0014】
本発明のこの目的および他の目的は、添付の図面と共に確かな説明を読むことにより明らかになるであろう。
【図面の簡単な説明】
【0015】
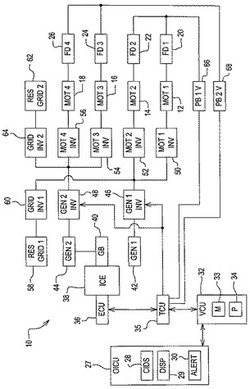
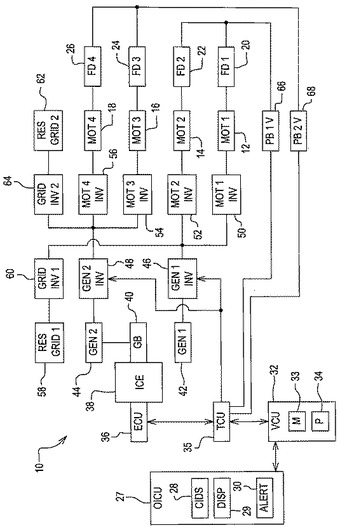
【図1】作業車両の4つの車輪を駆動する電気モータの動作を制御する制御装置ネットワークを示す概略ブロック図である。
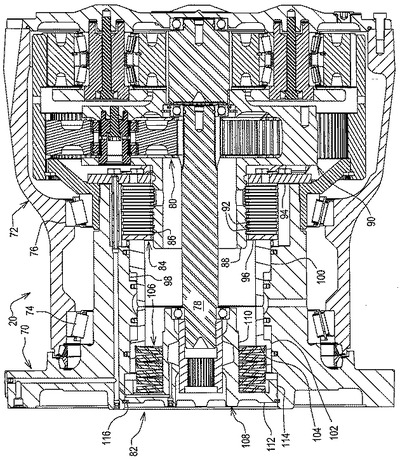
【図2】図1に示される電気モータの1つにより駆動されるように構成された車両終減速装置の長手軸断面図である。
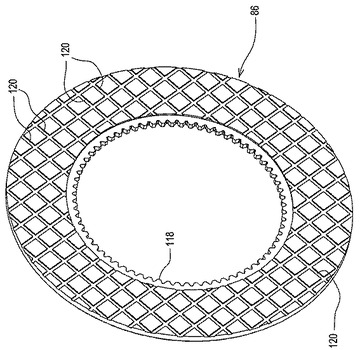
【図3】図1に示される制動装置円板束の回転円板の1つの斜視図である。
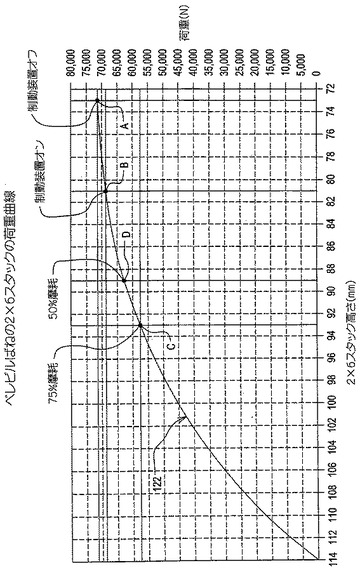
【図4】予荷重対スタック高さを示すベレビルばねの2×6スタックの荷重曲線を示す図である。
【発明を実施するための形態】
【0016】
ここで図1を参照すれば、たとえば積込機などの産業用車両の駆動車輪の前後の対(図示せず)を駆動する、4つの同一の終減速装置(FD1)20、(FD2)22、(FD3)24、および(FD4)26を駆動するトルクをそれぞれ分配するように結合する出力軸を有する、4つの同一の車輪駆動モータ(MOT1)12、(MOT2)14、(MOT3)16、および(MOT4)18を制御する、モータ制御装置10が示される。電気モータ12、14、16、および18は、3相切換型磁気抵抗モータであることが好ましいが、そうである必要はない。
【0017】
モータ制御装置10は、たとえば、作業員が様々な制御信号を送出することができる、絞り弁調整ボタンおよび制動試験入力ボタンなどの制御入力装置(CIDS)28を含む作業員媒介制御装置(OICU)27を含む。OICU27は、表示装置(DISP)29および警報装置(AD)30も含み、AD30は、たとえば、作業員にいくつかの動作状態を警告する、ブザーまたは光などの聴覚的または視覚的な警報装置である。OICU27から送られる制御信号または指令は、車両制御装置(VCU)32に結合し、VCU32は、これらの信号または指令に応答して機能し、伝送制御装置(TCU)35に適当な制御信号または指令を転送し、TCU35は、車輪駆動モータ12、14、16、および18の動作を制御するために供給され、このために内燃機関(ICE)38の内燃機関制御装置(ECU)36に結合する。本明細書において、これらの制御装置のうち、少なくともVCU32は、以下に説明する目的を有する記憶装置(M)33および処理装置(P)34を含むことに留意されたい。ICE38は、同一の発電機(GEN1)42および(GEN2)44の対を駆動するために結合する変速機(GB)40内に含まれる歯車列を駆動するように結合し、歯車列の歯車は、たとえば、内燃機関の出力速度を超えて3:1の比率だけ発電機の速度を増加させるように選択される。
【0018】
発電機42および44は、3相内部永久磁石同期発電機であることが好ましいが、そうである必要はない。発電機逆変換器(GEN 1 INV)46および(GEN 2 INV)48を規定する同一の回路は、発電機42および44にそれぞれ結合し、これらの発電機逆変換器は、TCU35により調整DCバス電圧を発生させるように指令されるとき、機能する。逆変換器46は、モータ逆変換器(MOT 1 INV)50および(MOT 2 INV)52を規定する第1および第2の同一の回路に結合し、同様に、逆変換器48は、モータ逆変換器(MOT 3 INV)54および(MOT 4 INV)56を規定する第3および第4の同一の回路に結合する。モータ磁界保護回路は、モータ12および14用に設けられ、格子逆変換器(GRID INV 1)60に電気的に結合する抵抗器格子(RES GRID 1)58を含み、格子逆変換器60は、モータ逆変換器50および52に電気的に結合する。同様に、モータ磁界保護回路は、モータ16および18用に設けられ、格子逆変換器(GRID INV 2)64に電気的に結合する抵抗器格子(RES GRID 1)を含み、格子逆変換器64は、モータ逆変換器54および56に電気的に結合する。最後に、TCU35は、電気的に応答する駐車制動装置弁(PB1 V)66および(PB2 V)68に電気的に結合し、弁66は、終減速装置20および22に油圧で結合し、弁68は、終減速装置24および26に油圧で結合する。
【0019】
ここで図2を参照すれば、図1の終減速装置組立体20の詳細が示されるが、終減速装置組立体の全てが同一なので、ここで示される詳細は、終減速装置の全てに当てはまることに留意されたい。具体的には、終減速装置組立体20が、主軸70を含み、車輪ハブ72が、それぞれ軸方向内側および外側に傾斜の付いた車輪軸受74および76により主軸70上に回転可能に取り付けられる。駆動軸78は、主軸70および車輪ハブ72内の中央に延在し、ハブ72の外側端部領域内に配置される2段遊星減速装置80を介して車輪ハブ72を駆動するように結合する軸方向外側端部を有する。軸78の軸方向内側端部は、軸結合器筒(図示せず)により電気モータ20の出力軸から駆動トルクを受け取るように結合する。
【0020】
駐車および常用制動装置組立体82は、主軸70に対する車輪ハブ72の選択的に制動回転するように設けられる。制動装置組立体82は、主軸70の軸方向外側端部領域内に配置され、減速装置80の第1段遊星枠90の環状の円筒部分88とスプライン接続する複数の回転円板86(8つが本実施形態で使用される)を含む、制動装置円板束84を含み、円筒部分88は、制動装置円板束84を通して軸方向内側に延在する。その周囲に形成されるほぼ半円筒の取付耳形部(図示せず)をそれぞれが有し、主軸70の内側に形成される軸方向に延在する相補形状の凹部(図示せず)内でそれぞれが受けられ、主軸70の外側端部から軸方向内側に延在する複数の静止円板92が、回転円板86と交互配置される。環状のリアクションプレート94が、主軸70の軸方向外側端部にボルト留めされる。環状の圧力プレート96も、その周囲に形成される複数のほぼ円筒の取付耳形部(図示せず)を設けられ、主軸70の内側に形成される上述の凹部のいくつかの凹部内で受けられる周囲を有する。階段状の制動装置ピストン内径98は、主軸70の内側の圧力プレート96の軸方向内側の場所に設けられ、軸方向外側および内側の内径部分は、中央内径部分の両側に配置され、中央内径部分よりも大きい。環状の常用制動装置ピストン100は、階段状の外側表面を有し、半径方向外側および内側部分はそれぞれ、内径98の軸方向外側および中間内径部分内で摺動するように取り付けられ、常用制動装置ピストン100の軸方向外側の環状の表面は、圧力プレート96と係合する。半径方向外側および内側部分がそれぞれ内径98の軸方向内側および中間内径部分内で摺動するように取り付けられる階段状の外側表面を有する環状の駐車制動装置ピストン102は、環状の軸方向外側に面する表面が常用制動装置ピストン100の環状の内側に面する表面に係合するように示される。駐車制動装置ピストン102の内側表面も、階段状であり、ベレビルばね106のスタックの軸方向外側端部に対抗して軸方向外側に面する環状の表面軸受104を画定し、本実施形態は、他の全ての対がいわゆる2×6スタックを形成するように逆向きになり、スタックの一方の端部が駐車制動装置ピストン102の内側端部内の一部分に配置される、6つの対を有する。
【0021】
入力送り台108は、ベレビルばね106のスタックを通して突出し、半径方向に延在する内側端部プレート部分112に接合する内側端部を有する管状の円筒ハブ部分110を含み、軸方向外側に突出する環状の円筒取付部分114に接合し、ハブ部分110、プレート部分112、および取付部分114は、プレート部分112の軸方向外側表面に対抗するスタック軸受の内側端部を含む、ベレビルばね106のスタックの内側端部を受ける、軸方向外側に開口する受口を画定するように協調する。送り台108の取付部分114は、主軸70の内側端部領域内に密着して受けられ、止輪116により所定の場所に保持され、止輪116は、送り台108の環状の端部表面に係合し、主軸70内に設けられる環状の溝に受けられる。
【0022】
図2に示される駐車および常用制動装置組立体82は、制動装置円板束84が駐車制動装置ピストン102および常用制動装置ピストン100を直列に貫通して機能するベレビルばね106のスタックにより圧縮された制動装置の状態で保持された、駐車制動装置係合状態にあるが、ベレビルばね106のスタックが、制動装置束84を圧縮する予荷重力を印加するように部分的に圧縮されることに留意されたい。
【0023】
ここで図3も参照すれば、その反対面(一方の面のみが示される)に適用される制動材料118を有する回転円板86の1つが示されるが、静止円板92の反対面は、滑らかで、それらに適用される制動材料を有しないことに留意されたい。制動装置円板束84が十分な寿命を有するように、制動装置円板束84は、湿式制動装置円板束として動作する必要があり、回転円板86と静止円板92との間に冷却流体が通る経路を設けるために、制動材料118は、流体流溝120のチェックの模様を含む。制動材料118の典型的な厚さは、回転円板86が新しいときは1mmであり、この厚さは、溝120の摩耗していない深さである。
【0024】
終減速装置20、22、24、および26のそれぞれの制動装置円板束84の様々な要素は、特に制動材料118は、使用中、摩耗を受ける。この摩耗は、終減速装置20、22、24、および26がそれぞれ、電気モータ12、14、16、および18により駆動され、ベレビルばね106のスタックが、終減速装置のそれぞれの駐車制動装置束84に通常の力を印加するように設けられることを利用する方法によって監視することができる。上述した終減速装置構造が好ましいが、異なる圧縮ばね装置を含む終減速装置も、本発明の原理から利益を得ることに留意されたい。具体的には、複数の個々の圧縮ばねが、駐車制動装置ピストンを付勢するのに環状に配列される圧縮ばね装置を使用することができる。
【0025】
ここで図4を参照すれば、ベレビルばね106の2×6スタックに関する典型的な荷重曲線122が示され、曲線は、ばねの様々なスタック高さに関するばねのスタックにより印加される予荷重を打点する。スタックが、駐車制動装置ピストン102上に作用する流体圧力により十分に圧縮されたとき、ベレビルばね106のスタックにより与えられた抵抗力に対応するデータ点Aが、曲線122上に位置する。データ点Aにより示されるように、ばね106のスタックは、約71,000ニュートン(N)の抵抗力を与え、約73mmの圧縮高さを有し、この高さは、スタックが固まりになる直前の点にある。制動装置円板束84が新しく、駐車制動装置が「オン」であり、全ての制動装置制御圧力が解放された状態に対応するデータ点Bも示される。データ点Bでは、ばね106のスタックにより与えられる予荷重は、約69,000Nであり、ばねのスタック高さは、約81mmである。制動装置円板束84が、安全な車両動作用には摩耗し尽したと考えられる状態に対応する点であるデータ点Cは、曲線122上に位置する別のデータ点であり、これが起こるとき、ばね106のスタックにより与えられる予荷重は、約58,000Nであり、ばねのスタック高さは、約93mmであることに留意されたい。したがって、制動装置円板束84の全ての摩耗が、8つの回転円板84のそれぞれの反対面を含む制動材料118に生じ、各面上の材料118の厚さが1mmであるとすれば、回転円板は、新しいときには合計16mmの制動材料を有し、制動装置円板束84の摩耗限界状態が存在するときには、制動材料118の約75%または12mmが摩耗したことを判定することができる。したがって、制動装置円板束84が摩耗限界状態に達する前に保守を計画するために、制動材料118の75%未満が摩耗したとき、作業員に知らせるのが望ましい。たとえば、制動材料118の半分が摩耗した状態を考慮することができ、この状態は、曲線122上のデータ点Dにより示され、この状態が起こると、ばね106のスタックにより与えられる予荷重は、約89mmのスタック高さにおいて約64,000Nであり、制動装置束84の制動材料118の50%が摩耗したことを示す。
【0026】
駐車制動装置の完全性、ならびに/または終減速装置20、22、24、および26のそれぞれの制動装置円板束84の摩耗を試験する準備は、車両制御装置32の記憶装置33内にベレビルばね106の2×6スタックの荷重曲線122を収容するステップを含む。それに加えて、制動装置が摺動することなくISO3405/MSHA制動要件を満たすように、駐車制動装置により印加することが要求される保持力に等しい値は、予め選択された最小ばね保持力値と共に記憶装置内に記憶され、その値において、制動装置円板束84を点検するステップを行う必要があることを作業員に警告する。さらに、必要に応じて、電流対トルクデータなどの、同一のモータ12、14、16、および18に関する動作データを含む参照表(図示せず)を、記憶装置33内に収容することができる。
【0027】
終減速装置20、22、24、および26のそれぞれの制動装置の摩耗を測定する動作は、車両をほぼ水平な場所に置いて、駐車制動装置に係合し、内燃機関38が空転する状態で行われる。作業員は、作業員媒介制御装置27から車両制御装置32に試験要求信号を送出することにより駐車制動装置の試験を開始させ、次いで、伝送制御装置35を介して信号を内燃機関制御装置36に送出することにより、ICE38の速度が空転速度から増加するが、たとえば本発明を具体化した車両では、この速度は1800rpmである。さらに、TCU35は、調整DCバス電圧を発生させるのに指令信号を発電機逆変換器46および48に送出する。次いで、TCU35は、電気信号を駐車制動装置弁66に送出させ、弁66は、終減速装置20および22の駐車制動装置ピストン102に流体を結合させ、したがって、ベレビルばね106のスタックを圧縮することにより駐車制動装置の解放をもたらす。次いで、TCU35は、VCU32を介してOICU27に信号を送出し、この信号は、表示装置29で表示灯を点灯させるか、または駐車制動装置試験を行う状態に設定されることを作業員に警告するように他のいくつかの装置を起動する。
【0028】
次いで、TCU35は、VCU32を介して信号を自動的にOICU27に戻し、この信号は、表示装置29の一部分に電力を供給し、表示装置29により、作業員は、有効な制動装置試験を行うことができるように、積込機の積込機ブーム(図示せず)を予備設定した閾値高さよりも上に持ち上げるように要求される。この動作が完了した後、TCU35は、VCU32を介して信号をOICU27に戻し、試験を開始する準備ができたとき、制御入力装置28の一部分を形成する絞り弁調整ボタンを押すように作業員に要求する。
【0029】
作業員がCIDS28の絞り弁調整ボタンを押すと、VCU32を介して信号がOICU27からTCU35に送出され、この信号により、電流がモータ逆変換器54および56に供給され、モータ16および18の固定子位相を連続的に切り替えることによりモータ逆変換器54および56を制御し、回転子をある位置から次の位置に回転させるようにするモータのそれぞれの回転子上の磁力を徐々に増加させるようにする。モータ軸を回転させるようにする磁力が徐々に増加することは、十分なトルクが、ベレビルばね106のスタックの予荷重による終減速装置24および26のそれぞれの制動装置円板束84内で発生する回転に対する抵抗力に打ち克つように形成されるまで、続く。終減速装置24および26のそれぞれのモータ軸78に印加されるトルクが、離脱トルクすなわち解放トルクに等しくなると、回転円板86は、静止円板92に対して摺動する。これにより、トルク要求量が突然低下し、それぞれのモータ16および18の直前のトルク出力が、解放トルクとなることを示し、これらの値は、TCU35により記録され、VCU32の記憶装置33に送出され、離脱した時間にモータに送出された電流の強度に基づいて、記憶装置33に収容された参照表から、解放トルク値を計算または決定する。この解放トルクを使用すれば、ベレビルばね106のスタックにより印加された対応する力(Fw)は、等式Fw=トルク/(Re)(μ)(Nf)を使用して、VCU32の処理装置34により逆算される。
【0030】
ここで、トルクは、モータ入力トルクに終減速比を乗算することにより決定される制動装置トルク能力(Nm)であり、
Reは、制動装置回転円板の実効摩擦半径(mm)であり(たとえば122mm)、
Fwは、ばね作用高さ印加力(N)であり、
μは、制動材料の摩擦係数(制動材料64では0.100)であり、
Nfは、摩擦媒介表面の数(たとえば8つの回転円板86が使用される場合には16)である。
【0031】
次いで、計算された力Fw(ばね予荷重)が使用され、対応するスタック高さに達する、ベレビルばね106の2×6スタックの記憶された荷重曲線122に入り、この高さは、新しいばねのスタックの高さと比較され、終減速装置FD24およびFD26のそれぞれの制動装置円板束84が受けた摩耗量を決定する。次いで、この計算されたばね予荷重は、近いうちに制動装置束84を点検するステップを行う必要があることを作業員に警告する荷重として記憶装置33内に記憶されたばね荷重と比較される。計算されたばね荷重が、記憶装置内に収容された荷重以下であるとき、VCUは、警報をOICU27の警報装置30に送出する。
【0032】
終減速装置24および26の駐車制動装置の試験が完了すると、TCUは、終減速装置24および26の駐車制動装置を解放し、終減速装置20および22の駐車制動装置に適用するそれぞれの信号を送出する。次いで、終減速装置20および22の駐車制動装置の解放および終減速装置24および26の駐車制動装置への適用に続く上述のステップが、終減速装置20および22の駐車制動装置を試験するために続けられる。
【0033】
駐車制動装置が、特殊車両用のISO3405/MSHA制動要件に記載される安全基準を満たすかどうかを判定するのに行われる駐車制動装置の日常の試験では、離脱トルクまたは解放トルクに達するまで、モータ回転子またはモータ軸を回転させるようにする磁力を徐々に増加させるのに、モータのそれぞれに供給される電流を制御することは必要ない。むしろ、VCUの処理装置34が、徐々に増加した誘導ねじり力から保持力を連続的に計算し、これらの計算された力を、記憶装置33内に記憶される、ISO3405/MSHA制動要件を満たすように要求される力である保持力と比較することだけが必要である。計算された力が、記憶された力以上になると、作業員は、試験された制動装置が試験を通過したことを知らされる。計算された保持力に対応する、ベレビルばね106の2×6スタックのスタック高さは、記憶された荷重曲線122から自動的に検索されるが、離脱トルクに達しないとき、スタック高さは、いつ点検を計画すべきかに関して作業員が多少考慮できるように、一定の摩耗表示を提供する。
【0034】
好ましい実施形態を説明してきたが、添付の特許請求の範囲に規定する本発明の範囲から逸脱することなく様々な変更を行うことができることは明らかであろう。
【符号の説明】
【0035】
10 モータ制御装置
12 車輪駆動モータ
14 車輪駆動モータ
16 車輪駆動モータ
18 車輪駆動モータ
20 終減速装置
22 終減速装置
24 終減速装置
26 終減速装置
28 制御入力装置
29 表示装置
30 警報装置
32 車両制御装置
33 記憶装置
34 処理装置
35 伝送制御装置
36 内燃機関制御装置
38 内燃機関
40 変速機
42 発電機
44 発電機
46 発電機逆変換器
48 発電機逆変換器
50 モータ逆変換器
52 モータ逆変換器
54 モータ逆変換器
56 モータ逆変換器
58 抵抗器格子
60 格子逆変換器
62 抵抗器格子
64 格子逆変換器
66 駐車制動装置弁
68 駐車制動装置弁
70 主軸
72 車輪ハブ
74 軸受
76 軸受
78 駆動軸
80 2段遊星減速装置
82 常用および駐車制動装置組立体
84 制動装置円板束
86 回転円板
88 円筒部分
90 第1段遊星枠
92 静止円板
94 リアクションプレート
96 圧力プレート
98 制動装置ピストン内径
100 常用制動装置ピストン
102 駐車制動装置ピストン
104 軸受
106 ベレビルばね
108 入力送り台
110 ハブ部分
112 プレート部分
114 取付部分
116 止輪
118 制動材料
120 流体流溝
【技術分野】
【0001】
本発明は、車両常用および駐車制動装置に関し、より具体的には、電気モータにより駆動される入力駆動軸を含む終減速組立体内で具体化される常用および駐車制動装置組立体の制動装置円板束の制動装置摩耗を示すデバイスに関する。
【背景技術】
【0002】
多くの種類の機械および車両の定期点検は、制動装置の状態、具体的には制動装置の一部分を形成する制動装置パッドまたは制動装置円板の摩耗を検査するステップを含む。制動装置の摩耗を測定する良い方法に到達するために、設計者により多くの努力がなされてきた。それに加えて、駐車制動装置の定期的な性能検査を義務付けている、いくつかの区域に規制がある。
【0003】
特に減速歯車装置を具体化する終減速機構を有する建設機械に使用される湿式制動装置における課題は、制動装置が終減速歯車装置、車輪駆動ハブ、および主軸すなわち回転軸の内側の場所に収容されるため、視覚的または機械的に摩耗量を検査するのが難しいことである。駐車制動装置の信頼性を判定する試験は、定期的なものとなるが、ほとんどが、故障を発生させる条件が是正されるまで機械が停止されることが必要な故障を含む合否判定の種類の試験であるという欠点を有する。
【0004】
制動装置組立体の分解を必要とすることなく、産業用および悪路用車両の車輪を制動するのに使用される駐車および常用制動装置組立体の一部分を形成する制動装置円板束の摩耗を監視することが知られている。この監視は、深さゲージを使用して行われ、制動装置円板束が新しいときに制動装置円板束に係合し、この測定値を制動装置円板束の供用寿命中に作成される後の測定値と比較するのに必要な制動装置ピストンの運動を測定する。2つの測定値間の差が特定の摩耗制限値内であるとき、制動装置円板束は、交換される必要はないが、その差が摩耗制限値を上回るとき、新しい円板が必要とされる。そのような制動装置監視装置は、1980年2月5日に発行された米国特許第4,186,822号に開示される。制動装置円板束の係合に影響を及ぼす制動装置ピストンを、その運動の手動測定を可能にするために接近可能となるように配置する必要があり、したがって、駐車および常用制動装置組立体が終減速装置と共に使用されるときに配置することができる場所に関する設計制限があるという欠点を、この摩耗測定装置は有する。この摩耗測定は、作業員が台を取り外し、手動で測定を行う必要があり、そのことが時間の浪費になるという欠点をさらに有する。
【0005】
車両車輪制動装置円板束の摩耗を監視する別の既知の方法は、被制動要素からの取付距離を測定する、1つまたは複数の制動装置ライニングサポート上に取り付けられる距離検知器から摩耗値出力信号を受け取る電気制御装置を使用することである。この電気制御装置は、測定摩耗値が比較される許容摩耗値を記憶装置内に有し、測定摩耗値が許容摩耗値と等しくなると、制御装置が警報を発する。測定摩耗値は、摩耗指示装置内に示すこともできる。摩耗を測定する直接的でない方法は、制動装置ライニング温度、制動装置ライニング厚さ、および制動装置トルク制御装置に供給される電気信号の強さを相互に関連付ける、電気制御装置の記憶装置内の特性の一群を記憶することによるものである。特性のこの記憶された一群に基づいて、電気制御装置は、制動装置トルク制御装置に供給される信号の強さ、および示される制動装置ライニング温度から摩耗値信号を形成し、この摩耗値信号は、厚さ、したがって制動装置ライニングの摩耗を特徴付ける。したがって、ある意味で、温度検知器は、摩耗値伝送機でもあり、伝送される摩耗値信号は、必要に応じて、ある尺度の読取値に変換される。米国特許第4,790,606号は、そのような摩耗監視装置を開示する。
【0006】
減速装置のトルク発生能力が発生する制動トルクを打ち消すのに十分大きい装置における車両車輪制動装置の完全性を判定することも知られている。この装置では、最初に制動装置が適用され、次いで十分なトルクが駆動軸に印加され、制動装置を摺動させて、駆動軸が所定の回転距離たとえばその軸の周りに1回転だけ回転するようにする。制動装置の摺動は、制動装置プレートとリアクションプレートとの間の相対運動を起こす。この相対運動は、制動装置適用部材とリアクションプレートとの間に制動トルクを発生させ、相対運動は、測定され、参照値と比較されて制動装置の機能的な完全性を検証する。米国特許第5,785,158号は、そのような制動装置完全性監視器を開示する。制動装置の完全性を検査するこの方法は、制動装置適用部材とリアクションプレートとの間の相対回転を決定する検知装置が必要であり、そのことが終減速装置に追加費用を付加するという欠点を有する。
【0007】
その際、所望されるものは、制動装置円板束を視覚的または機械的に検査するのが難しい場所の電気モータ駆動終減速装置内で具体化される車両常用および駐車制動装置の制動装置円板束の摩耗を確実および経済的に測定することができ、制動装置故障を避けるために制動装置を点検する必要性を顧客に警告するように制動装置故障を予測することができる、ある方法である。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】米国特許第4,186,822号
【特許文献2】米国特許第4,790,606号
【特許文献3】米国特許第5,785,158号
【非特許文献】
【0009】
【非特許文献1】ISO3405/MSHA
【発明の概要】
【発明が解決しようとする課題】
【0010】
本発明によれば、制動装置摩耗、特に常用および駐車制動装置組立体の一部分を形成し、電気モータにより駆動される湿式制動装置の円板の摩耗を決定する新規の方法が提供される。
【0011】
本発明の目的は、ばね係合駐車制動装置の摩耗した制動装置円板束を摺動させるのに必要な解放トルクと、新しい制動装置円板束を摺動させるのに必要な解放トルクとを比較し、これらのトルクは、終減速装置の電気駆動モータの出力軸を回転させるのに送出される指令信号により決定されるが、制動装置に適用するばね装置の予荷重の対応する損失を決定し、新しい制動装置円板束状態および摩耗した制動装置円板束状態に存在するばね装置の長さの差を決定し、長さのこの差から制動装置円板の摩耗を決定することにより、終減速装置制動装置の摩耗を決定することである。
【課題を解決するための手段】
【0012】
上述の目的は、制動装置束をその係合状態に付勢するのに使用されるばね装置に関する荷重曲線を供給することにより達成され、この荷重曲線は、制動装置に適用するばね装置の長さの関数としてばね装置により印加される予荷重を打点し、電気制御装置の記憶装置内にこの荷重曲線を記憶し、次いで摺動が起こる時間にモータに送出される指令信号の関数として制動装置束の回転円板と静止円板との間の摺動を起こすのに必要な解放トルクを決定し、計算したこのトルクを使用して、解放トルクに対応する、ばね装置により印加された荷重を決定し、次いでこの荷重を使用して、試験の時点に存在するばね装置長さに達する記憶された荷重曲線に入り、この長さは、新しい制動装置スタックのばね装置の記憶された長さと比較され、制動装置円板の摩耗量を導くようにする。本発明の開示では、制動装置は、ベレビルばねの2×6スタックを含む。この摩耗量は、必要に応じて、作業員に表示され、記憶装置内に記憶された許容摩耗量と比較され、測定摩耗量が許容摩耗量と等しいとき、作業員に警告する信号が提供される。
【0013】
したがって、摺動が円板束内で起こる時点にモータに送出される指令信号から解放トルク値を容易に引き出す電気制御装置の能力により、他のあらゆる測定装置を必要とすることなく、解放トルクを決定することができることが理解されよう。
【0014】
本発明のこの目的および他の目的は、添付の図面と共に確かな説明を読むことにより明らかになるであろう。
【図面の簡単な説明】
【0015】
【図1】作業車両の4つの車輪を駆動する電気モータの動作を制御する制御装置ネットワークを示す概略ブロック図である。
【図2】図1に示される電気モータの1つにより駆動されるように構成された車両終減速装置の長手軸断面図である。
【図3】図1に示される制動装置円板束の回転円板の1つの斜視図である。
【図4】予荷重対スタック高さを示すベレビルばねの2×6スタックの荷重曲線を示す図である。
【発明を実施するための形態】
【0016】
ここで図1を参照すれば、たとえば積込機などの産業用車両の駆動車輪の前後の対(図示せず)を駆動する、4つの同一の終減速装置(FD1)20、(FD2)22、(FD3)24、および(FD4)26を駆動するトルクをそれぞれ分配するように結合する出力軸を有する、4つの同一の車輪駆動モータ(MOT1)12、(MOT2)14、(MOT3)16、および(MOT4)18を制御する、モータ制御装置10が示される。電気モータ12、14、16、および18は、3相切換型磁気抵抗モータであることが好ましいが、そうである必要はない。
【0017】
モータ制御装置10は、たとえば、作業員が様々な制御信号を送出することができる、絞り弁調整ボタンおよび制動試験入力ボタンなどの制御入力装置(CIDS)28を含む作業員媒介制御装置(OICU)27を含む。OICU27は、表示装置(DISP)29および警報装置(AD)30も含み、AD30は、たとえば、作業員にいくつかの動作状態を警告する、ブザーまたは光などの聴覚的または視覚的な警報装置である。OICU27から送られる制御信号または指令は、車両制御装置(VCU)32に結合し、VCU32は、これらの信号または指令に応答して機能し、伝送制御装置(TCU)35に適当な制御信号または指令を転送し、TCU35は、車輪駆動モータ12、14、16、および18の動作を制御するために供給され、このために内燃機関(ICE)38の内燃機関制御装置(ECU)36に結合する。本明細書において、これらの制御装置のうち、少なくともVCU32は、以下に説明する目的を有する記憶装置(M)33および処理装置(P)34を含むことに留意されたい。ICE38は、同一の発電機(GEN1)42および(GEN2)44の対を駆動するために結合する変速機(GB)40内に含まれる歯車列を駆動するように結合し、歯車列の歯車は、たとえば、内燃機関の出力速度を超えて3:1の比率だけ発電機の速度を増加させるように選択される。
【0018】
発電機42および44は、3相内部永久磁石同期発電機であることが好ましいが、そうである必要はない。発電機逆変換器(GEN 1 INV)46および(GEN 2 INV)48を規定する同一の回路は、発電機42および44にそれぞれ結合し、これらの発電機逆変換器は、TCU35により調整DCバス電圧を発生させるように指令されるとき、機能する。逆変換器46は、モータ逆変換器(MOT 1 INV)50および(MOT 2 INV)52を規定する第1および第2の同一の回路に結合し、同様に、逆変換器48は、モータ逆変換器(MOT 3 INV)54および(MOT 4 INV)56を規定する第3および第4の同一の回路に結合する。モータ磁界保護回路は、モータ12および14用に設けられ、格子逆変換器(GRID INV 1)60に電気的に結合する抵抗器格子(RES GRID 1)58を含み、格子逆変換器60は、モータ逆変換器50および52に電気的に結合する。同様に、モータ磁界保護回路は、モータ16および18用に設けられ、格子逆変換器(GRID INV 2)64に電気的に結合する抵抗器格子(RES GRID 1)を含み、格子逆変換器64は、モータ逆変換器54および56に電気的に結合する。最後に、TCU35は、電気的に応答する駐車制動装置弁(PB1 V)66および(PB2 V)68に電気的に結合し、弁66は、終減速装置20および22に油圧で結合し、弁68は、終減速装置24および26に油圧で結合する。
【0019】
ここで図2を参照すれば、図1の終減速装置組立体20の詳細が示されるが、終減速装置組立体の全てが同一なので、ここで示される詳細は、終減速装置の全てに当てはまることに留意されたい。具体的には、終減速装置組立体20が、主軸70を含み、車輪ハブ72が、それぞれ軸方向内側および外側に傾斜の付いた車輪軸受74および76により主軸70上に回転可能に取り付けられる。駆動軸78は、主軸70および車輪ハブ72内の中央に延在し、ハブ72の外側端部領域内に配置される2段遊星減速装置80を介して車輪ハブ72を駆動するように結合する軸方向外側端部を有する。軸78の軸方向内側端部は、軸結合器筒(図示せず)により電気モータ20の出力軸から駆動トルクを受け取るように結合する。
【0020】
駐車および常用制動装置組立体82は、主軸70に対する車輪ハブ72の選択的に制動回転するように設けられる。制動装置組立体82は、主軸70の軸方向外側端部領域内に配置され、減速装置80の第1段遊星枠90の環状の円筒部分88とスプライン接続する複数の回転円板86(8つが本実施形態で使用される)を含む、制動装置円板束84を含み、円筒部分88は、制動装置円板束84を通して軸方向内側に延在する。その周囲に形成されるほぼ半円筒の取付耳形部(図示せず)をそれぞれが有し、主軸70の内側に形成される軸方向に延在する相補形状の凹部(図示せず)内でそれぞれが受けられ、主軸70の外側端部から軸方向内側に延在する複数の静止円板92が、回転円板86と交互配置される。環状のリアクションプレート94が、主軸70の軸方向外側端部にボルト留めされる。環状の圧力プレート96も、その周囲に形成される複数のほぼ円筒の取付耳形部(図示せず)を設けられ、主軸70の内側に形成される上述の凹部のいくつかの凹部内で受けられる周囲を有する。階段状の制動装置ピストン内径98は、主軸70の内側の圧力プレート96の軸方向内側の場所に設けられ、軸方向外側および内側の内径部分は、中央内径部分の両側に配置され、中央内径部分よりも大きい。環状の常用制動装置ピストン100は、階段状の外側表面を有し、半径方向外側および内側部分はそれぞれ、内径98の軸方向外側および中間内径部分内で摺動するように取り付けられ、常用制動装置ピストン100の軸方向外側の環状の表面は、圧力プレート96と係合する。半径方向外側および内側部分がそれぞれ内径98の軸方向内側および中間内径部分内で摺動するように取り付けられる階段状の外側表面を有する環状の駐車制動装置ピストン102は、環状の軸方向外側に面する表面が常用制動装置ピストン100の環状の内側に面する表面に係合するように示される。駐車制動装置ピストン102の内側表面も、階段状であり、ベレビルばね106のスタックの軸方向外側端部に対抗して軸方向外側に面する環状の表面軸受104を画定し、本実施形態は、他の全ての対がいわゆる2×6スタックを形成するように逆向きになり、スタックの一方の端部が駐車制動装置ピストン102の内側端部内の一部分に配置される、6つの対を有する。
【0021】
入力送り台108は、ベレビルばね106のスタックを通して突出し、半径方向に延在する内側端部プレート部分112に接合する内側端部を有する管状の円筒ハブ部分110を含み、軸方向外側に突出する環状の円筒取付部分114に接合し、ハブ部分110、プレート部分112、および取付部分114は、プレート部分112の軸方向外側表面に対抗するスタック軸受の内側端部を含む、ベレビルばね106のスタックの内側端部を受ける、軸方向外側に開口する受口を画定するように協調する。送り台108の取付部分114は、主軸70の内側端部領域内に密着して受けられ、止輪116により所定の場所に保持され、止輪116は、送り台108の環状の端部表面に係合し、主軸70内に設けられる環状の溝に受けられる。
【0022】
図2に示される駐車および常用制動装置組立体82は、制動装置円板束84が駐車制動装置ピストン102および常用制動装置ピストン100を直列に貫通して機能するベレビルばね106のスタックにより圧縮された制動装置の状態で保持された、駐車制動装置係合状態にあるが、ベレビルばね106のスタックが、制動装置束84を圧縮する予荷重力を印加するように部分的に圧縮されることに留意されたい。
【0023】
ここで図3も参照すれば、その反対面(一方の面のみが示される)に適用される制動材料118を有する回転円板86の1つが示されるが、静止円板92の反対面は、滑らかで、それらに適用される制動材料を有しないことに留意されたい。制動装置円板束84が十分な寿命を有するように、制動装置円板束84は、湿式制動装置円板束として動作する必要があり、回転円板86と静止円板92との間に冷却流体が通る経路を設けるために、制動材料118は、流体流溝120のチェックの模様を含む。制動材料118の典型的な厚さは、回転円板86が新しいときは1mmであり、この厚さは、溝120の摩耗していない深さである。
【0024】
終減速装置20、22、24、および26のそれぞれの制動装置円板束84の様々な要素は、特に制動材料118は、使用中、摩耗を受ける。この摩耗は、終減速装置20、22、24、および26がそれぞれ、電気モータ12、14、16、および18により駆動され、ベレビルばね106のスタックが、終減速装置のそれぞれの駐車制動装置束84に通常の力を印加するように設けられることを利用する方法によって監視することができる。上述した終減速装置構造が好ましいが、異なる圧縮ばね装置を含む終減速装置も、本発明の原理から利益を得ることに留意されたい。具体的には、複数の個々の圧縮ばねが、駐車制動装置ピストンを付勢するのに環状に配列される圧縮ばね装置を使用することができる。
【0025】
ここで図4を参照すれば、ベレビルばね106の2×6スタックに関する典型的な荷重曲線122が示され、曲線は、ばねの様々なスタック高さに関するばねのスタックにより印加される予荷重を打点する。スタックが、駐車制動装置ピストン102上に作用する流体圧力により十分に圧縮されたとき、ベレビルばね106のスタックにより与えられた抵抗力に対応するデータ点Aが、曲線122上に位置する。データ点Aにより示されるように、ばね106のスタックは、約71,000ニュートン(N)の抵抗力を与え、約73mmの圧縮高さを有し、この高さは、スタックが固まりになる直前の点にある。制動装置円板束84が新しく、駐車制動装置が「オン」であり、全ての制動装置制御圧力が解放された状態に対応するデータ点Bも示される。データ点Bでは、ばね106のスタックにより与えられる予荷重は、約69,000Nであり、ばねのスタック高さは、約81mmである。制動装置円板束84が、安全な車両動作用には摩耗し尽したと考えられる状態に対応する点であるデータ点Cは、曲線122上に位置する別のデータ点であり、これが起こるとき、ばね106のスタックにより与えられる予荷重は、約58,000Nであり、ばねのスタック高さは、約93mmであることに留意されたい。したがって、制動装置円板束84の全ての摩耗が、8つの回転円板84のそれぞれの反対面を含む制動材料118に生じ、各面上の材料118の厚さが1mmであるとすれば、回転円板は、新しいときには合計16mmの制動材料を有し、制動装置円板束84の摩耗限界状態が存在するときには、制動材料118の約75%または12mmが摩耗したことを判定することができる。したがって、制動装置円板束84が摩耗限界状態に達する前に保守を計画するために、制動材料118の75%未満が摩耗したとき、作業員に知らせるのが望ましい。たとえば、制動材料118の半分が摩耗した状態を考慮することができ、この状態は、曲線122上のデータ点Dにより示され、この状態が起こると、ばね106のスタックにより与えられる予荷重は、約89mmのスタック高さにおいて約64,000Nであり、制動装置束84の制動材料118の50%が摩耗したことを示す。
【0026】
駐車制動装置の完全性、ならびに/または終減速装置20、22、24、および26のそれぞれの制動装置円板束84の摩耗を試験する準備は、車両制御装置32の記憶装置33内にベレビルばね106の2×6スタックの荷重曲線122を収容するステップを含む。それに加えて、制動装置が摺動することなくISO3405/MSHA制動要件を満たすように、駐車制動装置により印加することが要求される保持力に等しい値は、予め選択された最小ばね保持力値と共に記憶装置内に記憶され、その値において、制動装置円板束84を点検するステップを行う必要があることを作業員に警告する。さらに、必要に応じて、電流対トルクデータなどの、同一のモータ12、14、16、および18に関する動作データを含む参照表(図示せず)を、記憶装置33内に収容することができる。
【0027】
終減速装置20、22、24、および26のそれぞれの制動装置の摩耗を測定する動作は、車両をほぼ水平な場所に置いて、駐車制動装置に係合し、内燃機関38が空転する状態で行われる。作業員は、作業員媒介制御装置27から車両制御装置32に試験要求信号を送出することにより駐車制動装置の試験を開始させ、次いで、伝送制御装置35を介して信号を内燃機関制御装置36に送出することにより、ICE38の速度が空転速度から増加するが、たとえば本発明を具体化した車両では、この速度は1800rpmである。さらに、TCU35は、調整DCバス電圧を発生させるのに指令信号を発電機逆変換器46および48に送出する。次いで、TCU35は、電気信号を駐車制動装置弁66に送出させ、弁66は、終減速装置20および22の駐車制動装置ピストン102に流体を結合させ、したがって、ベレビルばね106のスタックを圧縮することにより駐車制動装置の解放をもたらす。次いで、TCU35は、VCU32を介してOICU27に信号を送出し、この信号は、表示装置29で表示灯を点灯させるか、または駐車制動装置試験を行う状態に設定されることを作業員に警告するように他のいくつかの装置を起動する。
【0028】
次いで、TCU35は、VCU32を介して信号を自動的にOICU27に戻し、この信号は、表示装置29の一部分に電力を供給し、表示装置29により、作業員は、有効な制動装置試験を行うことができるように、積込機の積込機ブーム(図示せず)を予備設定した閾値高さよりも上に持ち上げるように要求される。この動作が完了した後、TCU35は、VCU32を介して信号をOICU27に戻し、試験を開始する準備ができたとき、制御入力装置28の一部分を形成する絞り弁調整ボタンを押すように作業員に要求する。
【0029】
作業員がCIDS28の絞り弁調整ボタンを押すと、VCU32を介して信号がOICU27からTCU35に送出され、この信号により、電流がモータ逆変換器54および56に供給され、モータ16および18の固定子位相を連続的に切り替えることによりモータ逆変換器54および56を制御し、回転子をある位置から次の位置に回転させるようにするモータのそれぞれの回転子上の磁力を徐々に増加させるようにする。モータ軸を回転させるようにする磁力が徐々に増加することは、十分なトルクが、ベレビルばね106のスタックの予荷重による終減速装置24および26のそれぞれの制動装置円板束84内で発生する回転に対する抵抗力に打ち克つように形成されるまで、続く。終減速装置24および26のそれぞれのモータ軸78に印加されるトルクが、離脱トルクすなわち解放トルクに等しくなると、回転円板86は、静止円板92に対して摺動する。これにより、トルク要求量が突然低下し、それぞれのモータ16および18の直前のトルク出力が、解放トルクとなることを示し、これらの値は、TCU35により記録され、VCU32の記憶装置33に送出され、離脱した時間にモータに送出された電流の強度に基づいて、記憶装置33に収容された参照表から、解放トルク値を計算または決定する。この解放トルクを使用すれば、ベレビルばね106のスタックにより印加された対応する力(Fw)は、等式Fw=トルク/(Re)(μ)(Nf)を使用して、VCU32の処理装置34により逆算される。
【0030】
ここで、トルクは、モータ入力トルクに終減速比を乗算することにより決定される制動装置トルク能力(Nm)であり、
Reは、制動装置回転円板の実効摩擦半径(mm)であり(たとえば122mm)、
Fwは、ばね作用高さ印加力(N)であり、
μは、制動材料の摩擦係数(制動材料64では0.100)であり、
Nfは、摩擦媒介表面の数(たとえば8つの回転円板86が使用される場合には16)である。
【0031】
次いで、計算された力Fw(ばね予荷重)が使用され、対応するスタック高さに達する、ベレビルばね106の2×6スタックの記憶された荷重曲線122に入り、この高さは、新しいばねのスタックの高さと比較され、終減速装置FD24およびFD26のそれぞれの制動装置円板束84が受けた摩耗量を決定する。次いで、この計算されたばね予荷重は、近いうちに制動装置束84を点検するステップを行う必要があることを作業員に警告する荷重として記憶装置33内に記憶されたばね荷重と比較される。計算されたばね荷重が、記憶装置内に収容された荷重以下であるとき、VCUは、警報をOICU27の警報装置30に送出する。
【0032】
終減速装置24および26の駐車制動装置の試験が完了すると、TCUは、終減速装置24および26の駐車制動装置を解放し、終減速装置20および22の駐車制動装置に適用するそれぞれの信号を送出する。次いで、終減速装置20および22の駐車制動装置の解放および終減速装置24および26の駐車制動装置への適用に続く上述のステップが、終減速装置20および22の駐車制動装置を試験するために続けられる。
【0033】
駐車制動装置が、特殊車両用のISO3405/MSHA制動要件に記載される安全基準を満たすかどうかを判定するのに行われる駐車制動装置の日常の試験では、離脱トルクまたは解放トルクに達するまで、モータ回転子またはモータ軸を回転させるようにする磁力を徐々に増加させるのに、モータのそれぞれに供給される電流を制御することは必要ない。むしろ、VCUの処理装置34が、徐々に増加した誘導ねじり力から保持力を連続的に計算し、これらの計算された力を、記憶装置33内に記憶される、ISO3405/MSHA制動要件を満たすように要求される力である保持力と比較することだけが必要である。計算された力が、記憶された力以上になると、作業員は、試験された制動装置が試験を通過したことを知らされる。計算された保持力に対応する、ベレビルばね106の2×6スタックのスタック高さは、記憶された荷重曲線122から自動的に検索されるが、離脱トルクに達しないとき、スタック高さは、いつ点検を計画すべきかに関して作業員が多少考慮できるように、一定の摩耗表示を提供する。
【0034】
好ましい実施形態を説明してきたが、添付の特許請求の範囲に規定する本発明の範囲から逸脱することなく様々な変更を行うことができることは明らかであろう。
【符号の説明】
【0035】
10 モータ制御装置
12 車輪駆動モータ
14 車輪駆動モータ
16 車輪駆動モータ
18 車輪駆動モータ
20 終減速装置
22 終減速装置
24 終減速装置
26 終減速装置
28 制御入力装置
29 表示装置
30 警報装置
32 車両制御装置
33 記憶装置
34 処理装置
35 伝送制御装置
36 内燃機関制御装置
38 内燃機関
40 変速機
42 発電機
44 発電機
46 発電機逆変換器
48 発電機逆変換器
50 モータ逆変換器
52 モータ逆変換器
54 モータ逆変換器
56 モータ逆変換器
58 抵抗器格子
60 格子逆変換器
62 抵抗器格子
64 格子逆変換器
66 駐車制動装置弁
68 駐車制動装置弁
70 主軸
72 車輪ハブ
74 軸受
76 軸受
78 駆動軸
80 2段遊星減速装置
82 常用および駐車制動装置組立体
84 制動装置円板束
86 回転円板
88 円筒部分
90 第1段遊星枠
92 静止円板
94 リアクションプレート
96 圧力プレート
98 制動装置ピストン内径
100 常用制動装置ピストン
102 駐車制動装置ピストン
104 軸受
106 ベレビルばね
108 入力送り台
110 ハブ部分
112 プレート部分
114 取付部分
116 止輪
118 制動材料
120 流体流溝
【特許請求の範囲】
【請求項1】
円筒部分を有する主軸と、前記主軸の周りに回転するように取り付けられる車輪ハブと、前記主軸の軸方向に延在し、前記車輪ハブを駆動するように結合する駆動軸と、前記駆動軸に結合する電気モータと、円板制動装置とを含む、終減速装置内の円板制動装置の摩耗を決定する方法であって、前記円板制動装置は、前記ハブと共に回転するように取り付けられ、前記主軸に取り付けられた複数の静止円板と交互配置され、それにより制動装置円板束を形成する複数の回転円板と、前記制動装置円板束と軸方向に並べて取り付けられ、駐車制動装置係合状態を形成するために、前記回転円板および静止円板を共に付勢する予荷重を形成するように通常は圧縮される圧縮ばね装置と、前記ばね装置と力で係合するように取り付けられ、それにより前記ばね装置に対抗する力を選択的に印加することを可能にし、駐車制動装置解放状態を形成するようにする駐車制動装置解放油圧ピストンとを含み、
a.前記制動装置束が新しいとき、前記制動装置円板束内に前記駐車制動装置係合状態を形成するステップと、
b.前記制動装置円板束が新しく、前記回転円板が前記静止円板に対して摺動するときに対応する初期離脱トルク値に前記駆動トルクが達するまで、前記駆動軸に増加する駆動トルクを供給する前記電気モータに、駆動トルク増加指令を送出するステップと、
c.前記制動装置円板束が新しいとき、前記圧縮ばね装置により印加される、対応する初期予荷重を計算するのに、前記初期離脱トルク値を使用するステップと、
d.前記制動装置円板束が摩耗し、前記回転円板が前記静止円板に対して摺動するときに対応する後の離脱トルク値に前記駆動トルクが達するまで、前記増加する駆動トルクが前記軸に供給されながら、前記制動装置円板束の供用寿命中にステップbを反復するステップと、
e.前記制動装置円板束が摩耗したとき、前記圧縮ばね装置により印加される、対応する後の予荷重を計算するのに、前記後の離脱トルク値を使用するステップと、
f.前記初期および後の予荷重にそれぞれ対応する高さの差が、前記制動装置円板束の摩耗量に等しくなることに留意しながら、圧縮ばね装置高さに対して打点された圧縮ばね予荷重を含む前記圧縮ばね装置に関連する荷重曲線を参照するステップと
を含む、方法。
【請求項2】
円筒部分を有する主軸と、前記主軸の周りに回転するように取り付けられる車輪ハブと、前記主軸の軸方向に延在し、前記車輪ハブを駆動するように結合する駆動軸と、前記駆動軸に結合する電気モータと、円板制動装置とを含む、終減速装置内の円板制動装置の信頼性を判定する方法であって、前記円板制動装置は、前記ハブと共に回転するように取り付けられ、前記主軸に取り付けられた複数の静止円板と交互配置され、それにより制動装置円板束を形成する複数の回転円板と、前記制動装置円板束と軸方向に並べて取り付けられ、駐車制動装置係合状態を形成するために、前記回転円板および静止円板を共に付勢する予荷重を形成するように通常は圧縮される圧縮ばね装置と、前記ばね装置と力で係合するように取り付けられ、それにより前記ばね装置に対抗する力を選択的に印加することを可能にし、駐車制動装置解放状態を形成するようにする駐車制動装置解放油圧ピストンとを含み、
a.前記制動装置円板束内に前記駐車制動装置係合状態を形成するステップと、
b.前記駆動軸に徐々に増加する駆動トルクを供給する前記電気モータに、徐々に駆動トルクを増加させる指令を送出するステップと、
c.前記制動装置円板束が、前記徐々に増加する駆動トルクに応答して離脱に抵抗するように、前記圧縮ばね装置により印加されるそれぞれの予荷重を連続的に計算するステップと、
d.前記駆動トルクを連続的に徐々に増加させ、前記計算された予荷重を、前記終減速装置を含む車両用のISO3405/MSHA制動要件を満たすのに必要な予荷重と比較し、最終的に計算された予荷重が、前記必要な予荷重以上となるとき、前記駐車制動装置が前記制動要件を満たす、ステップと
を含む、方法。
【請求項3】
円筒部分を有する主軸と、前記主軸の前記円筒部分の周りに回転するように取り付けられる車輪ハブと、前記主軸の軸方向に延在し、前記車輪ハブを駆動するように結合する駆動軸と、前記駆動軸に結合する出力軸を有する電気モータと、円板制動装置とを含む終減速装置において、前記円板制動装置は、前記ハブと共に回転するように取り付けられ、前記主軸に取り付けられた複数の静止円板と交互配置され、それにより制動装置円板束を形成する複数の回転円板と、前記制動装置円板束と軸方向に並べて取り付けられ、駐車制動装置係合状態を形成するために、前記回転円板および静止円板を共に通常は付勢する圧縮ばね装置と、前記圧縮ばね装置と力で係合するように取り付けられ、それにより前記圧縮ばね装置に対抗する力を選択的に印加することを可能にし、駐車制動装置解放状態を形成するようにする駐車制動装置解放油圧ピストンとを含み、制動装置状態測定装置は、
出力軸を有する内燃機関と、
前記内燃機関を制御するように結合する電気的内燃機関制御装置と、
前記出力軸により駆動されるように結合する少なくとも1つの電気発電機と、
前記少なくとも1つの電気発電機と結合する発電機逆変換器と、
前記発電機逆変換器と結合するモータ逆変換器と、
前記少なくとも1つのモータ逆変換器から電力を受け取るように接続される少なくとも1つの電気モータと、
前記発電機逆変換器に結合し、前記トルクが、前記静止円板に対する前記回転円板の回転をもたらす離脱トルクに達する点まで、前記モータ出力軸および前記駆動軸を回転させるようにする力を誘導するトルクを徐々に増加させるために、前記発電機逆変換器から前記モータ逆変換器への電流を選択的に制御するように動作し、前記離脱トルクを記録する、電気的伝送制御装置と、
前記電気制御装置と通信するように結合し、記憶装置および処理装置を含む車両制御装置であり、前記処理装置は、前記離脱トルクに対応する前記ばね装置の予荷重力を計算する、車両制御装置と、
前記車両制御装置の前記記憶装置内に記憶される、前記ばね装置のばね高さに対して打点された前記圧縮ばね装置の予荷重を含む、ばね荷重曲線であり、前記車両制御装置は、前記離脱トルクに対応する前記予荷重力に対応するばね高さを発見し、それを記録するように機能し、第1および後の制動装置試験からの記録済のばね高さを比較し、第1および第2の試験間に生じる前記制動装置円板束の摩耗を決定することができる、ばね荷重曲線と
を含む、終減速装置。
【請求項1】
円筒部分を有する主軸と、前記主軸の周りに回転するように取り付けられる車輪ハブと、前記主軸の軸方向に延在し、前記車輪ハブを駆動するように結合する駆動軸と、前記駆動軸に結合する電気モータと、円板制動装置とを含む、終減速装置内の円板制動装置の摩耗を決定する方法であって、前記円板制動装置は、前記ハブと共に回転するように取り付けられ、前記主軸に取り付けられた複数の静止円板と交互配置され、それにより制動装置円板束を形成する複数の回転円板と、前記制動装置円板束と軸方向に並べて取り付けられ、駐車制動装置係合状態を形成するために、前記回転円板および静止円板を共に付勢する予荷重を形成するように通常は圧縮される圧縮ばね装置と、前記ばね装置と力で係合するように取り付けられ、それにより前記ばね装置に対抗する力を選択的に印加することを可能にし、駐車制動装置解放状態を形成するようにする駐車制動装置解放油圧ピストンとを含み、
a.前記制動装置束が新しいとき、前記制動装置円板束内に前記駐車制動装置係合状態を形成するステップと、
b.前記制動装置円板束が新しく、前記回転円板が前記静止円板に対して摺動するときに対応する初期離脱トルク値に前記駆動トルクが達するまで、前記駆動軸に増加する駆動トルクを供給する前記電気モータに、駆動トルク増加指令を送出するステップと、
c.前記制動装置円板束が新しいとき、前記圧縮ばね装置により印加される、対応する初期予荷重を計算するのに、前記初期離脱トルク値を使用するステップと、
d.前記制動装置円板束が摩耗し、前記回転円板が前記静止円板に対して摺動するときに対応する後の離脱トルク値に前記駆動トルクが達するまで、前記増加する駆動トルクが前記軸に供給されながら、前記制動装置円板束の供用寿命中にステップbを反復するステップと、
e.前記制動装置円板束が摩耗したとき、前記圧縮ばね装置により印加される、対応する後の予荷重を計算するのに、前記後の離脱トルク値を使用するステップと、
f.前記初期および後の予荷重にそれぞれ対応する高さの差が、前記制動装置円板束の摩耗量に等しくなることに留意しながら、圧縮ばね装置高さに対して打点された圧縮ばね予荷重を含む前記圧縮ばね装置に関連する荷重曲線を参照するステップと
を含む、方法。
【請求項2】
円筒部分を有する主軸と、前記主軸の周りに回転するように取り付けられる車輪ハブと、前記主軸の軸方向に延在し、前記車輪ハブを駆動するように結合する駆動軸と、前記駆動軸に結合する電気モータと、円板制動装置とを含む、終減速装置内の円板制動装置の信頼性を判定する方法であって、前記円板制動装置は、前記ハブと共に回転するように取り付けられ、前記主軸に取り付けられた複数の静止円板と交互配置され、それにより制動装置円板束を形成する複数の回転円板と、前記制動装置円板束と軸方向に並べて取り付けられ、駐車制動装置係合状態を形成するために、前記回転円板および静止円板を共に付勢する予荷重を形成するように通常は圧縮される圧縮ばね装置と、前記ばね装置と力で係合するように取り付けられ、それにより前記ばね装置に対抗する力を選択的に印加することを可能にし、駐車制動装置解放状態を形成するようにする駐車制動装置解放油圧ピストンとを含み、
a.前記制動装置円板束内に前記駐車制動装置係合状態を形成するステップと、
b.前記駆動軸に徐々に増加する駆動トルクを供給する前記電気モータに、徐々に駆動トルクを増加させる指令を送出するステップと、
c.前記制動装置円板束が、前記徐々に増加する駆動トルクに応答して離脱に抵抗するように、前記圧縮ばね装置により印加されるそれぞれの予荷重を連続的に計算するステップと、
d.前記駆動トルクを連続的に徐々に増加させ、前記計算された予荷重を、前記終減速装置を含む車両用のISO3405/MSHA制動要件を満たすのに必要な予荷重と比較し、最終的に計算された予荷重が、前記必要な予荷重以上となるとき、前記駐車制動装置が前記制動要件を満たす、ステップと
を含む、方法。
【請求項3】
円筒部分を有する主軸と、前記主軸の前記円筒部分の周りに回転するように取り付けられる車輪ハブと、前記主軸の軸方向に延在し、前記車輪ハブを駆動するように結合する駆動軸と、前記駆動軸に結合する出力軸を有する電気モータと、円板制動装置とを含む終減速装置において、前記円板制動装置は、前記ハブと共に回転するように取り付けられ、前記主軸に取り付けられた複数の静止円板と交互配置され、それにより制動装置円板束を形成する複数の回転円板と、前記制動装置円板束と軸方向に並べて取り付けられ、駐車制動装置係合状態を形成するために、前記回転円板および静止円板を共に通常は付勢する圧縮ばね装置と、前記圧縮ばね装置と力で係合するように取り付けられ、それにより前記圧縮ばね装置に対抗する力を選択的に印加することを可能にし、駐車制動装置解放状態を形成するようにする駐車制動装置解放油圧ピストンとを含み、制動装置状態測定装置は、
出力軸を有する内燃機関と、
前記内燃機関を制御するように結合する電気的内燃機関制御装置と、
前記出力軸により駆動されるように結合する少なくとも1つの電気発電機と、
前記少なくとも1つの電気発電機と結合する発電機逆変換器と、
前記発電機逆変換器と結合するモータ逆変換器と、
前記少なくとも1つのモータ逆変換器から電力を受け取るように接続される少なくとも1つの電気モータと、
前記発電機逆変換器に結合し、前記トルクが、前記静止円板に対する前記回転円板の回転をもたらす離脱トルクに達する点まで、前記モータ出力軸および前記駆動軸を回転させるようにする力を誘導するトルクを徐々に増加させるために、前記発電機逆変換器から前記モータ逆変換器への電流を選択的に制御するように動作し、前記離脱トルクを記録する、電気的伝送制御装置と、
前記電気制御装置と通信するように結合し、記憶装置および処理装置を含む車両制御装置であり、前記処理装置は、前記離脱トルクに対応する前記ばね装置の予荷重力を計算する、車両制御装置と、
前記車両制御装置の前記記憶装置内に記憶される、前記ばね装置のばね高さに対して打点された前記圧縮ばね装置の予荷重を含む、ばね荷重曲線であり、前記車両制御装置は、前記離脱トルクに対応する前記予荷重力に対応するばね高さを発見し、それを記録するように機能し、第1および後の制動装置試験からの記録済のばね高さを比較し、第1および第2の試験間に生じる前記制動装置円板束の摩耗を決定することができる、ばね荷重曲線と
を含む、終減速装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2012−180931(P2012−180931A)
【公開日】平成24年9月20日(2012.9.20)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−37271(P2012−37271)
【出願日】平成24年2月23日(2012.2.23)
【出願人】(591005165)ディーア・アンド・カンパニー (109)
【氏名又は名称原語表記】DEERE AND COMPANY
【Fターム(参考)】
【公開日】平成24年9月20日(2012.9.20)
【国際特許分類】
【出願番号】特願2012−37271(P2012−37271)
【出願日】平成24年2月23日(2012.2.23)
【出願人】(591005165)ディーア・アンド・カンパニー (109)
【氏名又は名称原語表記】DEERE AND COMPANY
【Fターム(参考)】
[ Back to top ]