
制御された組織圧縮を伴う円形ステープラ
【課題】外科手術ステープリング器具において用いられる組織圧縮制限機構を提供する。
【解決手段】組織を圧縮する外科手術器具に用いられるトルク制限機構40は、外科手術器具の接近させる機構と係合可能な被駆動部材78であって、被駆動部材78は被駆動表面を有する、被駆動部材78と、駆動部材78であって、被駆動部材78の被駆動表面と係合可能な駆動表面を有し、器具のクランピングアクチュエータに接続され、駆動部材82の駆動表面は、所定の係合圧力で被駆動部材78の被駆動表面に対して滑る、駆動部材82と、駆動部材82によって被駆動部材78に加えられる圧力を調整する部材を有するトルク制御器42とを備えている、トルク制限機構。
【解決手段】組織を圧縮する外科手術器具に用いられるトルク制限機構40は、外科手術器具の接近させる機構と係合可能な被駆動部材78であって、被駆動部材78は被駆動表面を有する、被駆動部材78と、駆動部材78であって、被駆動部材78の被駆動表面と係合可能な駆動表面を有し、器具のクランピングアクチュエータに接続され、駆動部材82の駆動表面は、所定の係合圧力で被駆動部材78の被駆動表面に対して滑る、駆動部材82と、駆動部材82によって被駆動部材78に加えられる圧力を調整する部材を有するトルク制御器42とを備えている、トルク制限機構。
【発明の詳細な説明】
【技術分野】
【0001】
(背景)
(1.技術分野)
本開示は、組織クランピング構造を組み込んだ外科手術器具と共に用いる力制限機構に関する。より詳細には、本開示は、外科手術ステープリング器具において用いられる組織圧縮制限機構に関する。
【背景技術】
【0002】
(2.関連技術の背景)
吻合は、分離した空洞器官切開面の外科手術的結合である。典型的には、吻合処置は、空洞組織の病気または欠陥の切開面が除去され、残りの端部切開面が結合される外科手術の後に続く。所望の吻合処置に従って、端部切開面は、円形、端部対側部または側部対側部の器官再建方法によって結合され得る。
【0003】
円形の吻合処置において、器官切開面の2つの端部は、ステープリング器具によって結合され、ステープリング器具は、各器官切開部の端部切開面を通って円形配列のステープルを駆動し、同時に駆動された円形配列のステープルの任意の組織内部の芯を抜いて、管状の通路を空ける。空洞の器官の円形吻合を行う器具の実施例は、特許文献1、特許文献2、特許文献3、特許文献4、特許文献5、特許文献6、特許文献7および特許文献8に説明され、これらの各々は、その全体が参照によって本明細書に援用される。典型的には、これらの器具は、近位端に器具を作動させるためのハンドルと、遠位端に配置されるステープル保持構成要素とを有する細長いシャフトを含む。アンビルヘッドが取り付けられたアンビルロッドを含むアンビルアセンブリは、ステープル保持構成要素に隣接して遠位端に取り付けられる。ステープリングされるべき器官の組織の向かい合う端部分は、アンビルヘッドとステープル保持構成要素との間でクランプされる。クランプされた組織は、ステープル保持構成要素からの複数のステープルを駆動することによってステープリングされ、その結果、ステープルの端部は、組織を通過し、アンビルヘッドによって変形させられる。
【0004】
使用時、ステープル保持構成要素およびアンビルアセンブリは、結合されるべき器官の向かい合う組織切開面内に位置を決められ、接近させられて、ステープリングする位置に向かい合う組織切開面を引き込む。このことは、向かい合う組織切開面を一緒にして圧縮する。現在のデバイスは、器具が設定された接近状態に達するまでオペレータが組織切開面を圧縮することに依存する。設定された接近状態に達して組織を過度に圧縮すると、組織損傷または制限された血流は、組織壊死を引き起こし得る。組織が十分な圧縮によってクランプされない場合、吻合接合部において出血および/または漏れのより大きい傾向がある。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】米国特許第7,303,106号明細書
【特許文献2】米国特許第6,053,390号明細書
【特許文献3】米国特許第5,588,579号明細書
【特許文献4】米国特許第5,119,983号明細書
【特許文献5】米国特許第5,005,749号明細書
【特許文献6】米国特許第4,646,745号明細書
【特許文献7】米国特許第4,576,167号明細書
【特許文献8】米国特許第4,473,077号明細書
【発明の概要】
【発明が解決しようとする課題】
【0006】
従って、過度の組織圧縮を防ぐ圧縮制限機構を有する外科手術ステープラに対するニーズがある。さらに、組織切開面に加えられる圧縮の量をユーザが事前選択することを可能にするユーザ選択可能圧縮制限機構を有する外科手術ステープリング器具に対するニーズがある。
【課題を解決するための手段】
【0007】
(概要)
外科手術器具に用いられる力またはトルク制限機構が提供される。トルク制限機構は、概して、外科手術器具の接近させる機構と係合可能な被駆動部材であって、被駆動部材は被駆動表面を有する、被駆動部材と、駆動部材であって、被駆動部材の被駆動表面と係合可能な駆動表面を有する、駆動部材とを有する。駆動部材は、器具のクランピングアクチュエータに接続される。駆動部材の駆動表面は、所定の係合圧力で被駆動部材の被駆動表面に対して滑る。機構は、駆動部材によって被駆動部材に加えられる圧力を調整する部材を有するトルク制御器を有する。
【0008】
ある好ましい実施形態において、駆動部材は、被駆動部材に対して回転可能である。駆動表面は、被駆動表面を摩擦で係合し得る。ある実施形態において、駆動表面および被駆動表面は、相互係合する構造を有する。特定の実施形態において、駆動表面および被駆動表面は、相互係合する歯を有する。
【0009】
さらなる代替の実施形態において、相互係合する構造は、デテント機構である。デテント機構は、駆動表面と被駆動表面との間に位置を決められる少なくとも1つの可動コネクタを含む。より特定の実施形態において、駆動表面および被駆動表面のうちの少なくとも1つは、カップを含み、該駆動表面および被駆動表面のうちのもう一方は、カップと取り外し可能で係合可能なボールを支持する。
【0010】
開示されるトルク制限機構は、駆動部材が被駆動部材と係合するように付勢されるばねであるように、駆動部材と係合可能なばねをさらに含む。
【0011】
トルク制御器が備え付けられ、トルク制御器は、付勢ばねと係合可能であり、付勢ばねによって駆動部材に加えられる圧力の量を事前設定する。トルク制御器は、付勢ばねおよびスライド部材と係合可能なフックを含む。
【0012】
本体部分と、本体部分に取り付けられる第1のクランピング部材および第1のクランピング部材に対して可動な第2のクランピング部材とを含む外科手術器具もまた提供される。第1のクランピング部材に対して第2のクランピング部材を動かす接近させる機構が提供される。接近させる機構は、長手方向に可動な打込みねじであって、そこに形成される螺旋形溝を有する、打込みねじと、打込みねじの周りに取り付けられる回転可能スリーブとを含む。回転可能スリーブは、回転可能スリーブの回転が本体部分内において打込みねじを長手方向に並進させるように螺旋形溝の中に延びる打込みピンを含む。
【0013】
本体部分内にトルク制限機構が提供され、トルク制限機構は、制限機構の少なくとも一部分が所定の係合圧力で回転可能スリーブに対して滑るように係合可能である。トルク制限機構は、回転可能スリーブに付着された被駆動表面と、被駆動表面と係合可能な駆動表面とを含む。
【0014】
一実施形態において、駆動表面は、被駆動表面を摩擦で係合する。代替の実施形態において、駆動表面および被駆動表面は、相互係合構造を有する。特定の実施形態において、駆動表面および被駆動表面は、相互係合歯を有する。
【0015】
さらなる代替の実施形態において、相互係合構造は、デテント機構であり、駆動表面および被駆動表面のうちの少なくとも1つは、カップを含み、駆動表面および被駆動表面のうちのもう一方は、カップと取り外し可能で係合可能なボールを支持する。
【0016】
外科手術器具は、駆動部材と係合可能なばねをさらに含む。駆動部材は、被駆動部材と係合するように付勢されるばねである。
【0017】
外科手術器具の第1のクランピング部材と第2のクランピング部材との間の組織の過剰圧縮を防ぐ方法がさらに開示される。方法は、本体部分と、本体部分に取り付けられる第1のクランピング部材および第1のクランピング部材に対して可動な第2のクランピング部材とを有する外科手術器具を提供することを含む。第1のクランピング部材に対して第2のクランピング部材を動かす接近させる機構が提供される。接近させる機構は、長手方向に可動な打込みねじであって、そこに形成される螺旋形溝を有する、打込みねじと、打込みのねじの周りに取り付けられる回転可能スリーブとを含む。
【0018】
回転可能スリーブは、回転可能スリーブの回転が本体部分内において打込みねじを長手方向に並進させるように螺旋形溝の中に延びる打込みピンを含む。トルク制限機構が提供され、トルク制限機構は回転可能スリーブと係合可能である。接近させるノブは、本体部分に回転可能で取り付けられ、トルク制限機構と係合可能である。
【0019】
方法は、トルク制限機構の少なくとも一部分が所定の係合圧力で回転可能スリーブに対して滑るように接近させるノブを回転させて回転可能スリーブを回転させるステップをさらに含む。
【0020】
例えば、本発明は以下の項目を提供する。
(項目1)
組織を圧縮する外科手術器具に用いるトルク制限機構であって、
外科手術器具の接近させる機構と係合可能な被駆動部材であって、該被駆動部材は被駆動表面を有する、被駆動部材と、
該被駆動部材の該被駆動表面と係合可能な駆動表面を有し、該器具のクランピングアクチュエータに接続されている駆動部材であって、該駆動部材の該駆動表面は、所定の係合圧力で該被駆動部材の該被駆動表面に対して滑る、駆動部材と、
該駆動部材によって該被駆動部材に加えられる圧力を調整する部材を有するトルク制御器と
を備えている、トルク制限機構。
(項目2)
駆動部材は、上記被駆動部材に対して回転可能である、上記項目のいずれかに記載のトルク制限機構。
(項目3)
上記駆動表面は、上記被駆動表面を摩擦で係合する、上記項目のいずれかに記載のトルク制限機構。
(項目4)
上記駆動表面および上記被駆動表面は、相互係合する構造を有する、上記項目のいずれかに記載のトルク制限機構。
(項目5)
上記駆動表面および上記被駆動表面は、相互係合する歯を有する、上記項目のいずれかに記載のトルク制限機構。
(項目6)
上記相互係合する構造は、デテント機構である、上記項目のいずれかに記載のトルク制限機構。
(項目7)
上記駆動表面と上記被駆動表面との間に少なくとも1つの可動コネクタをさらに備えている、上記項目のいずれかに記載のトルク制限機構。
(項目8)
上記駆動表面および被駆動表面のうちの少なくとも1つは、カップを含み、該駆動表面および被駆動表面のうちのもう一方は、該カップと取り外し可能で係合可能なボールを支持する、上記項目のいずれかに記載のトルク制限機構。
(項目9)
上記駆動部材と係合可能なばねをさらに備え、該駆動部材は、上記被駆動部材と係合するように付勢されるばねである、上記項目のいずれかに記載のトルク制限機構。
(項目10)
上記トルク制御器の部材は、上記付勢ばねと係合する、上記項目のいずれかに記載のトルク制限機構。
(項目11)
上記トルク制御器は、上記付勢ばねおよびスライド部材と係合可能なフックを含む、上記項目のいずれかに記載のトルク制限機構。
(項目12)
本体部分と、
該本体部分に取り付けられる第1のクランピング部材および該第1のクランピング部材に対して可動な第2のクランピング部材と、
該第1のクランピング部材に対して該第2のクランピング部材を動かす接近させる機構であって、該接近させる機構は、長手方向に可動な打込みねじであって、そこに形成される螺旋形溝を有する、打込みねじと、該打込みねじの周りに取り付けられる回転可能スリーブとを含み、該回転可能スリーブは、該回転可能スリーブの回転が該本体部分内において該打込みねじを長手方向に並進させるように該螺旋形溝の中に延びる打込みピンを含む、接近させる機構と、
該回転可能スリーブと係合可能なトルク制限機構であって、該トルク制限機構の少なくとも一部分は所定の係合圧力で該回転可能スリーブに対して滑る、トルク制限機構と
を備えている、外科手術器具。
(項目13)
上記トルク制限機構は、上記回転可能スリーブに付着された被駆動表面と、該被駆動表面と係合可能な駆動表面とを含む、上記項目のいずれかに記載の外科手術器具。
(項目14)
上記駆動表面は、上記被駆動表面を摩擦で係合する、上記項目のいずれかに記載の外科手術器具。
(項目15)
上記駆動表面および上記被駆動表面は、相互係合構造を有する、上記項目のいずれかに記載の外科手術器具。
(項目16)
上記駆動表面および上記被駆動表面は、相互係合歯を有する、上記項目のいずれかに記載の外科手術器具。
(項目17)
上記相互係合構造は、デテント機構である、上記項目のいずれかに記載の外科手術器具。
(項目18)
上記駆動表面および被駆動表面のうちの少なくとも1つは、カップを含み、該駆動表面および被駆動表面のうちのもう一方は、該カップと取り外し可能で係合可能なボールを支持する、上記項目のいずれかに記載の外科手術器具。
(項目19)
上記駆動部材と係合可能なばねをさらに備え、該駆動部材は、上記被駆動部材と係合するように付勢されるばねである、上記項目のいずれかに記載の外科手術器具。
(項目20)
外科手術器具の第1のクランピング部材と第2のクランピング部材との間の組織の過剰圧縮を防ぐ方法であって、
外科手術器具を提供することであって、該外科手術器具は、本体部分と、該本体部分に取り付けられる第1のクランピング部材および該第1のクランピング部材に対して可動な第2のクランピング部材と、
該第1のクランピング部材に対して該第2のクランピング部材を動かす接近させる機構であって、該接近させる機構は、長手方向に可動な打込みねじであって、そこに形成される螺旋形溝を有する、打込みねじと、該打込みのねじの周りに取り付けられる回転可能スリーブとを含み、該回転可能スリーブは、該回転可能スリーブの回転が該本体部分内において該打込みねじを長手方向に並進させるように該螺旋形溝の中に延びる打込みピンと、該回転可能スリーブと係合可能な接近させるノブとを含む、接近させる機構と、
該回転可能スリーブと係合可能なトルク制限機構と
を含む、外科手術器具を提供することと、
該トルク制限機構の少なくとも一部分が所定の係合圧力で該回転可能スリーブに対して滑るように該接近させるノブを回転させて回転可能スリーブを回転させることと
を包含する、方法。
【0021】
(摘要)
組織クランピング外科手術器具に用いられるトルク制限機構が提供される。トルク制限機構は、概して、外科手術器具の接近させる機構と係合可能な被駆動部材であって、被駆動部材は被駆動表面を有する、被駆動部材と、駆動部材であって、被駆動部材の被駆動表面と係合可能な駆動表面を有する、駆動部材とを含む。駆動部材は、駆動部材の駆動表面が、所定の係合圧力で、被駆動部材の被駆動表面に対して滑るか、または被駆動部材の被駆動表面から係合解除されるように、被駆動部材に対して回転可能である。
【0022】
組織圧縮を制御するトルク制限機構を有する本開示される外科手術ステープラの様々な実施形態は、図面を参照して本明細書に開示される。
【図面の簡単な説明】
【0023】
【図1】図1は、組織圧縮を制御するトルク制限機構の一実施形態を組み込む外科手術ステープラの斜視図である。
【図2】図2は、部品が分離されている状態の、図1の外科手術ステープラのハンドル部分の斜視図である。
【図3】図3は、部品が分離されている状態の、図2のハンドル部分において利用されるトルク制限機構の斜視図である。
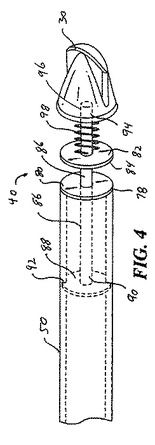
【図4】図4は、図3のトルク制限機構の斜視図である。
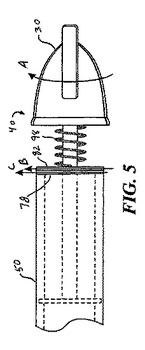
【図5】図5は、摩擦プレートまたは圧力プレートが係合されている状態の、図4のトルク制限機構の側面図である。
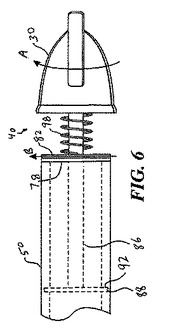
【図6】図6は、摩擦プレートが互いに対して滑っている状態の、図5に類似した側面図である。
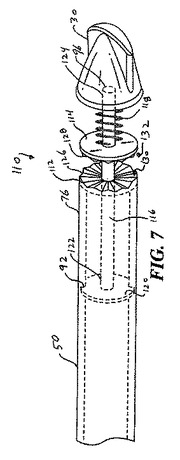
【図7】図7は、図1の外科手術ステープラに用いられるトルク制限機構の代替の実施形態の斜視図である。
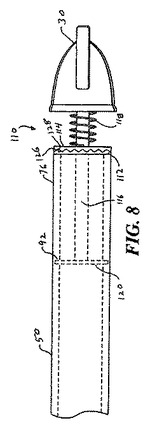
【図8】図8は、被駆動プレートおよび駆動プレートが係合されている状態の、図7のトルク制限機構の側面図である。
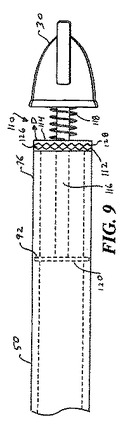
【図9】図9は、駆動プレートおよび被駆動プレートが係合解除されている状態の、図8に類似した図である。
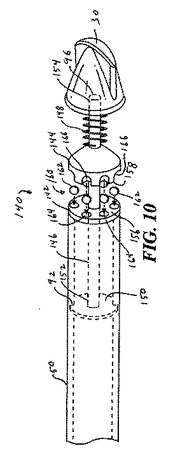
【図10】図10は、図1の外科手術ステープラと共に用いられるトルク制限機構のさらなる代替の実施形態の斜視図である。
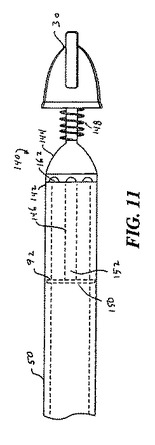
【図11】図11は、被駆動プレートおよび駆動プレートが係合されている状態の、図10のトルク制限機構の側面図である。
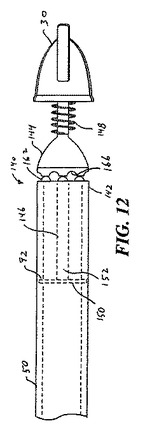
【図12】図12は、駆動プレートおよび被駆動プレートが係合解除されている状態の、図11に類似した図である。
【発明を実施するための形態】
【0024】
(実施形態の詳細な説明)
組織圧縮制限機構を組み込んだ本開示される外科手術ステープリングデバイスの複数の実施形態は、図面を参照してここで詳細に説明され、図面において、類似の数字は、いくつかの図の各々において同一かまたは対応する要素を示す。当技術分野において一般的であるように、用語「近位」は、ユーザまたはオペレータ、すなわち外科医または内科医に、より近い部分または構成要素をいい、一方、用語「遠位」は、ユーザからより遠くに離れた部分または構成要素をいう。
【0025】
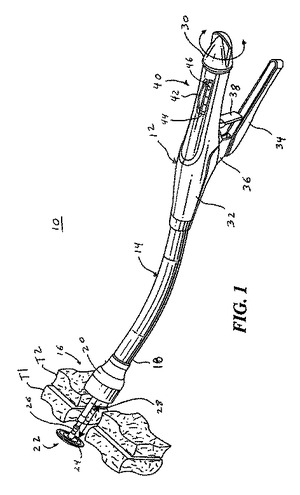
最初に図1を参照すると、外科手術ステープリングデバイス10が開示される。外科手術ステープリングデバイス10は、円形ステープラである。外科手術ステープリングデバイス10は、概してハンドルアセンブリ12と、ハンドルアセンブリ12から遠位に延びる細長い本体部分14とを含む。動作可能ヘッドアセンブリ16は、細長い本体部分14の遠位端18に取り付けられ、概して細長い本体部分14の遠位端18に取り付けられるステープルカートリッジ20と、より詳細に以下に説明される方法でステープルカートリッジ20に対して可動なアンビルアセンブリ22とを含む。アンビルアセンブリ22は、アンビルプレート24と、アンビルプレート24から近位に延びるアンビルシャフト26とを含む。可動アンビルリテイナまたは保持シャフト28は、細長い本体部分14の遠位端18から延び、アンビルシャフト26を取り外し可能で受容するように備え付けられる。接近させるノブ30は、ハンドルアセンブリ12の本体ハウジング32に回転可能で取り付けられ、ステープルカートリッジ20に対してアンビルアセンブリ22を動かして、組織を掴み、圧縮するように動作可能である。
【0026】
トリガ34は、本体ハウジング32のトリガ延長部36に可動で取り付けられる。トリガ34の作動は、ステープルカートリッジ20からアンビルプレート24の中にステープル(図示されていない)を排出するように機能を果たす。トリガロック38は、本体ハウジング32に可動で取り付けられ、トリガ34の邪魔にならないように手動で動かされるまでトリガ34の動きを阻止して、意図しない発射を防ぐように備え付けられる。ハンドルアセンブリおよび本体ハウジングは、米国特許第7,303,106号に開示されるように配置され得、この特許の開示は、その全体が参照によって本明細書により本明細書に援用される。‘106特許はまた、プッシャバック186と、円筒形ナイフ188と、ステープルガイド192とを有するアセンブリを開示する。プッシャバックは、プッシャリンク74に接続され、ステープルカートリッジから外科手術ステープルを発射する複数のプッシャフィンガを有する。
【0027】
トルク制限機構40は、本体ハウジング32内に含まれて、ステープルカートリッジ20とアンビルプレート24との間に捕獲される組織に加えられる圧縮の量を制御する。接近させるノブ30は、ステープルカートリッジ20とアンビルプレート24との間で圧縮された組織が所定のレベルの圧縮に達した場合、接近させるノブ30がアンビル保持シャフト28との係合がなくなって滑り、それによって、組織に対するいかなるさらなる圧縮も防ぐように、トルク制限機構40を係合可能である。トルク制限機構40は、以下に説明される方法で接近させるノブ30が滑るレベルを事前設定する、本体ハウジング32を通って延びるトルク制御器42を含む。インディシアプレート44は、トルク制御器42に隣接して本体ハウジング32に取り付けられ、接近させるノブ30の滑り点または滑り範囲をオペレータが事前設定することを可能にする数字インディシア46を含む。このようにして、外科医の経験は、ステープルまたはクランプされる組織の種類、患者の年齢、組織の状態または他の要因に従って器具を設定するために利用され得る。
【0028】
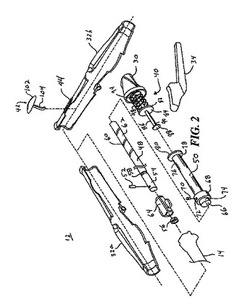
ここで図1および図2を参照すると、接近させるノブ30(図1)の回転に応答してステープルカートリッジ20に対してアンビルアセンブリ22を動かすために、外科手術ステープリング器具10は、ハンドルアセンブリ12の本体ハウジング32に取り付けられた打込みねじ48と回転可能スリーブ50とを含む。打込みねじ48は、本体ハウジング32内において長手方向に可動であり、アンビル保持シャフト28に接続される。打込みねじ48は、打込みねじ48の遠位端54を通って位置を決められるピン52を含み、打込みねじ48の遠位端54は、公知の方法でアンビル保持シャフト28に直接または間接的に接続される。例えば、湾曲した細長い本体部分14を通って長手方向運動を伝えるために、ピン52は、バンドの近位端(図示されていない)に接続され得、一方、バンドの遠位端は、米国特許第7,303,106号に、より詳細に説明される方法でアンビル保持シャフト28に接続され得、この特許の開示は、参照によって本明細書により本明細書に援用される。従って、本体ハウジング32内の打込みねじ48の長手方向の動きは、ステープルカートリッジ20に対するアンビルアセンブリ22の長手方向の動きを引き起こす。
【0029】
示されるように、本体ハウジング32は、相補的ハーフ(complementary halves)32aおよび32bとして備え付けられる。シール56は、細長い本体部分14を通っておよび本体ハウジング32から通気気体および他の流体が漏れることを防ぐために、打込みねじの遠位端54に形成される周囲溝58に備え付けられる。ねじストップ64は、本体ハウジング32内における打込みねじ48の長手方向の走行を制限するために、打込みねじ48の遠位端54に備え付けられる。螺旋形溝60は、打込みねじ48の近位部分62に備え付けられ、打込みねじ48を長手方向に動かすために回転可能スリーブ50によって係合される。
【0030】
具体的には、打込みねじ48は、回転可能スリーブ50内に形成されるボア66内に位置を決められる。拡大つば(enlarged collar)68は、本体ハウジング32内において回転可能スリーブ50を回転可能で支持する。回転可能スリーブ50のボア66内において長手方向に打込みねじ48を動かすために、打込みピン70は、拡大つば68を通って形成される穴72を通って延び、ボア66の中に延びる。打込みピン70は、打込みねじ48の近位部分62に形成される螺旋形溝60内において進む。従って、回転可能スリーブ50が本体ハウジング32内において回転させられると、打込みピン70は、螺旋形溝62内において進み、本体ハウジング32内において打込みねじ48を引きかつ/または前進させる。本明細書において上記に言及されたように、打込みねじ48は、アンビルアセンブリ22に接続される。本体ハウジング32内における打込みねじ48の長手方向の動きは、ステープルカートリッジ20に対してアンビルアセンブリ22の長手方向の動きを引き起こす。
【0031】
接近させるノブ30が回転させられると、回転力または回転トルクは、回転可能スリーブ50に加えられて、回転可能スリーブ50を回転させ、打込みねじ48における螺旋形溝60内において打込みピン70を動かす。回転力は、長手方向または直線の力に変換され、ステープルカートリッジ20の方にアンビルアセンブリ22を動かし、それによって、接近させるノブ30の回転に応答してアンビルとステープルカートリッジとの間に捕獲された組織を圧縮する。
【0032】
いかなる制御要因または制限要因もない場合、継続するトルクが回転可能スリーブ50に加えられると、増加する量の直線の力がアンビルアセンブリ22に伝えられるかまたは及ぼされ、それによって、アンビルアセンブリ22のアンビルプレート24とステープルカートリッジ20との間に捕獲された組織に増加する量の圧縮を加える。過剰圧縮または過少圧縮を防ぐために、トルク制限機構40が備え付けられ、回転可能スリーブ50に加えられるトルクの量、従ってアンビルアセンブリ22に加えられる直線の力の量を所定のレベルまたは調整可能レベルに制限する。
【0033】
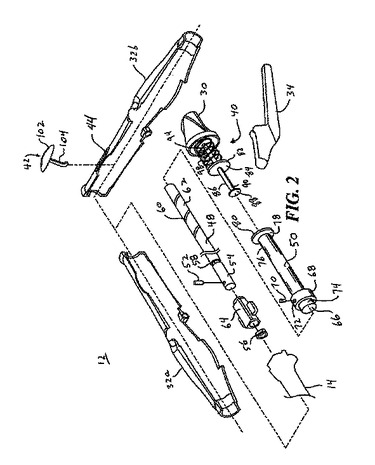
ここで図2および図3を参照すると、本体ハウジング32(図2)内において回転可能スリーブ50を支持する拡大つば68は、回転可能スリーブ50の遠位端74に位置を決められる。外科医が回転可能スリーブ50を手動で回転させるために、回転可能スリーブ50の近位端76は、被駆動表面80を有する被駆動部材または被駆動ディスク78が備え付けられる。被駆動ディスク78は、トルク制限機構40の一部を形成する。上記に言及されたように、接近させるノブ30は、本体ハウジング32に備え付けられ、回転可能であり、アンビルアセンブリ22の動きを引き起こす。示されるように、トルク制限機構40は、接近させるノブ30と回転可能スリーブ50との間に位置を決められる。アンビルアセンブリ22に加えられる直線の力従って組織圧縮の量を制御するために、トルク制限機構40が、備え付けられ、回転可能スリーブ50に加えられる回転トルクの量を制限する。
【0034】
図2、図3および図4を参照すると、この実施形態において、トルク制限機構40は、駆動表面84を有する駆動部材または駆動ディスク82をさらに含む。回転可能スリーブ50を回転させるために、駆動表面84が、備え付けられ、被駆動ディスク78の被駆動表面80を摩擦で係合する。駆動部材または駆動ディスク82もまた、ノブ30に取り付けられる。駆動ディスク82は、駆動シャフト86に取り付けられる。駆動シャフト86は、駆動シャフト86の遠位端90に備え付けられるサポートディスク88を含む。サポートディスク88は、回転可能スリーブ50(図3および図4)に形成される周囲溝92内において回転可能で支持される。駆動シャフト86の近位端94は、接近させるノブ30に付着される。具体的には、駆動シャフト86の近位端94は、接近させるノブ30に形成される穴96内に固定される。従って、接近させるノブ30が回転させられると、トルク制限機構40の駆動ディスク82は、回転可能スリーブ50に備え付けられるトルク制限機構40の被駆動ディスク78を摩擦で係合し、回転させる。
【0035】
トルク制限機構40は、付勢ばね98をさらに含み、付勢ばね98は、駆動ディスク82を付勢して被駆動ディスク78を摩擦係合するために接近させるノブ30と駆動ディスク82との間に備え付けられる。駆動シャフト86は、駆動ディスク82における穴100を通って延びる。具体的には示されていないが、駆動ディスク82は、(ピンなどで)締められるかまたはさもなければ駆動シャフト86に取り付けられ、その結果、駆動ディスク82は、被駆動ディスク78から係合解除されるかまたは被駆動ディスク78に対して滑らされるために、駆動シャフト86と共に回転し、駆動シャフト86に沿って長手方向に自由に動く。
【0036】
本明細書において上記に言及されたように、トルク制御器42(図1および図2)は、ステープルカートリッジ20とアンビルアセンブリ22との間の組織に加えられる圧縮力の量を調整可能で制御するために、本体ハウジング32に備え付けられる。さしあたり図2を参照すると、トルク制御器42は、スライド102を含み、スライド102は、手で把持可能で、本体ハウジング32外に延び得、インディシアプレート44に隣接して位置を定められ得る。部材またはフック104は、スライド102から延び、付勢ばね98の、例えばコイル106、108などのコイルを係合して、駆動ディスク82に加えられるばね圧力の量を調整する。トルク制御器42は、駆動部材によって被駆動部材に加えられる圧力を調整する。この方法で、トルク制御器42は、駆動部材または駆動ディスク82によって被駆動部材または被駆動ディスク78に加えられる圧力の最大量を事前設定することが可能である。これは、回転可能スリーブ50に加えられるトルクの最大量、従ってステープルカートリッジ20とアンビルアセンブリ22との間に捕獲された組織に加えられる圧縮力の最大量を事前設定する。
【0037】
トルク制限機構40が駆動ディスク82を被駆動ディスク78と係合するように付勢する付勢ばね98を含むが、トルク制限機構40が付勢ばね98を省略し得ることは注意されるべきである。この構成において、被駆動ディスク78の被駆動表面80および駆動ディスク82の駆動表面84は、所定のトルク限界において被駆動ディスク78に対して駆動ディスク82が滑るように、所定の摩擦係数を有して製造され得る。
【0038】
ここで図1、図2、図5および図6を参照すると、回転可能スリーブ50に加えられる回転力またはトルクの量を制限するトルク制限機構40の使用法がここで説明される。最初に図1および図2を参照すると、トルク制御器42は、フック104が所望の量のプレロード圧力を付勢ばね98に加えるように調整される。これは、スライド102がインディシアプレート44上の適切な数字インディシア46と整列するまで、インディシアプレート44に対する滑りスライド102によって達成される。その後接近させるノブ30は、矢印A(図5)の方向に回転させられて、ステープルカートリッジ20の方にアンビルアセンブリ22を引き、それによって、第1の組織切開面T1および第2の組織切開面T2を圧縮して一緒にし、組織切開面をステープルされる位置にもっていく。
【0039】
特に図5を参照すると、矢印Aの方向への接近させるノブ30の回転は、矢印Bの方向に駆動ディスク82を回転させる。駆動ディスク82の被駆動ディスク70との摩擦係合は、矢印Cの方向に被駆動ディスク78を回転させ、それによって、回転可能スリーブ50を回転させて、上記に説明されたように組織切開部を圧縮する。
【0040】
ここで図6を参照すると、接近させるノブ30が回転させられ続けると、第1の組織切開面T1および第2の組織切開面T2の増加する圧縮は、打込みねじ48を通過する増加する量の直線の力、従って回転可能スリーブ50によって必要とされる増加する量の回転トルクを必要とする。付勢ばね98によって加えられトルク制御器42によって制御される所定の量の圧力において、被駆動ディスク78と駆動ディスク82との間の摩擦力は、打ち負かされ、駆動ディスク82が被駆動ディスク78に対して滑ることを可能にする。駆動ディスク82が被駆動ディスク78に対して滑ると、さらなる増加する量のトルクは回転可能スリーブ50に加えられないで、従ってさらなる増加する量の直線の力は打込みねじ48を介してアンビルアセンブリ22に伝えられない。この方法で、トルク制限機構40は、アンビルアセンブリ22とステープルカートリッジ20との間で捕獲された組織の過剰圧縮を防ぐ。
【0041】
ここで図7〜図9を参照すると、最初に図7に関して、本明細書において上記に説明された外科手術ステープリングデバイス10と共に用いるトルク制限機構110の代替の実施形態が開示される。上記に説明されたトルク制限機構40と同様に、トルク制限機構110は、概して回転可能スリーブ50の近位端76に備え付けられる被駆動部材または被駆動ディスク112と、駆動シャフト116に沿って長手方向に動くように取り付けられる駆動部材または駆動ディスク114とを含む。付勢ばね118は、駆動シャフト116の周りに備え付けられ、駆動ディスク114を付勢して、被駆動ディスク112を係合する。本明細書において上記に説明された駆動ディスク82と同様に、駆動ディスク114は、駆動シャフト116に沿って回転して動くように取り付けられ、付勢ばね118の付勢に対抗して駆動シャフト116に沿って長手方向に自由に動く。
【0042】
サポートディスク120は、駆動シャフト116の遠位端122に備え付けられ、回転可能スリーブ50における周囲溝92内において回転可能で支持される。駆動シャフト116の近位端124は、接近させるノブ30における穴96内に付着される。従って、接近させるノブ30の回転は、駆動シャフト116および従って駆動ディスク114を回転させる。この実施形態において、被駆動ディスク112は、複数の爪または被駆動歯126が備え付けられ、複数の爪または被駆動歯126は、駆動ディスク114に形成される複数の対応する爪または駆動ディスク歯128と機械的に相互係合可能(interengageable)である。被駆動ディスク歯126は、被駆動ディスク112に被駆動表面130を形成し、駆動ディスク歯128は、駆動ディスク114に駆動表面132を形成する。
【0043】
ここで図8および図9を参照すると、使用時、付勢ばね118は、駆動ディスク114を付勢して、被駆動ディスク112を係合する。具体的には、付勢ばね118は、駆動歯128を含む駆動表面132を付勢して、被駆動歯126を含む被駆動表面130を係合する。本明細書において上記に説明される方法と同一の方法で、トルク制御器42は、付勢ばね118によって駆動ディスク114に加えられる力の最大量を調整するために操作される。接近させるノブ30が回転させられると、駆動ディスク114上の駆動歯128は、被駆動ディスク112上の被駆動歯126と相互係合され、それによって回転可能スリーブ50を回転させる。本明細書において上記にさらに言及されたように、回転可能スリーブ50の回転は、ステープルカートリッジ20に対するアンビルアセンブリ22の長手方向の動きを引き起こし、それによって、組織を圧縮する。
【0044】
図9を特に参照すると、回転可能スリーブ50が回転させられると、組織間に存在する圧縮力により回転可能スリーブ50を回転させ続けるのに増加する量の力が必要とされる。接近させるノブ30の継続する回転は、必要とするトルクの量が付勢ばね118によって駆動ディスク114に加えられる圧力を超えるなどの時間まで回転可能スリーブ50にトルクを加え続ける。この時点で、駆動ディスク114は、駆動ディスク112に対して「滑り」、付勢ばね118の付勢に対抗して矢印Dの方向に近位に動く。具体的には、駆動ディスク114上の駆動歯128は、被駆動ディスク112上の被駆動歯126に対して滑るかまたは被駆動ディスク112上の被駆動歯126から係合解除され、それによって、回転可能スリーブ50に増加したトルクをさらに加えることを防ぐ。この方法で、トルク制限機構110は、アンビルアセンブリ22とステープルカートリッジ20との間に捕獲された組織の過剰圧縮を防ぐ。
【0045】
ここで図10〜図12を参照すると、最初に図10に関して、外科手術ステープリングデバイス10と共に用いるトルク制限機構140のさらなる代替の実施形態が開示される。上記に説明されたトルク制限機構40と同様に、トルク制限機構140は、概して回転可能スリーブ50の近位端76に備え付けられる被駆動部材または被駆動ディスク142と、駆動シャフト146に沿って長手方向に動くように取り付けられる円錐形駆動部材または円錐形駆動ディスク144とを含む。付勢ばね148は、駆動シャフト146の周りに備え付けられ、駆動ディスク144を付勢して、被駆動ディスク142を係合する。本明細書において上記に説明された駆動ディスク82と同様に、駆動ディスク144は、駆動シャフト146に沿って回転して動くように取り付けられ、付勢ばね148の付勢に対抗して駆動シャフト146に沿って長手方向に自由に動く。
【0046】
サポートディスク150は、駆動シャフト146の遠位端152に備え付けられ、回転可能スリーブ50における周囲溝92内において回転可能で支持される。駆動シャフト146の近位端154は、接近させるノブ30における穴96内に付着される。従って、接近させるノブ30の回転は、駆動シャフト146および従って駆動ディスク144を回転させる。この実施形態において、被駆動ディスク142は被駆動ディスク表面156を含み、駆動ディスク144は駆動ディスク表面158を含む。少なくとも1つの解除可能コネクタ160は、被駆動ディスク表面156と駆動ディスク表面158との間に備え付けられる。事前設定量のトルクが回転可能スリーブ50に加えられると、解除可能コネクタ160は、被駆動表面156および/または駆動ディスク表面158に対して滑る。
【0047】
この特定の実施形態において、解除可能コネクタ160は、複数の接続ボール162の形式である。被駆動ディスク142の被駆動ディスク表面156は複数の被駆動ディスクカップ164を含み、駆動ディスク144の駆動ディスク表面158は複数の対応する駆動ディスクカップ166を含む。接続ボール162は、被駆動ディスクカップ164と駆動ディスクカップ166との間で可動で支持される。接続ボール162は、駆動ディスク144上の付勢ばね148の付勢圧力によって、駆動ディスクカップ164と被駆動ディスクカップ166との間で維持される。
【0048】
ここで図11および図12を参照すると、使用時、接近させるノブ30は、駆動ディスク144が接続ボール162を介して被駆動ディスク142を回転させるように回転させられる。被駆動ディスク142の回転は、対応して回転可能スリーブ50を回転させ、それによって、アンビルアセンブリ22とステープルカートリッジ20との間で長手方向の動きを引き起こす(図1)。アンビルアセンブリ22がステープルカートリッジ20の方に動き、アンビルアセンブリ22とステープルカートリッジ20との間にある組織を圧縮すると、増加する量の回転力またはトルクが、回転可能スリーブ50に加えられるのに必要とされる。
【0049】
図12に最も良く示されるように、回転可能スリーブ50の回転を継続するために、増加する量の回転力が、接近させるノブ30に加えられるのに必要とされる。回転可能スリーブ50の回転を継続するのに必要とする力がトルク制御器42によって事前設定された力を超えた場合、駆動ディスク144は、付勢ばね148の付勢に対応して近位に動く。このことは、接続ボール162を駆動ディスクカップ166から出すように切り開くか(slit)または「ひょいと出し(pop)」、それによって、被駆動ディスク142に加えられるいかなるさらなる回転力も除去する。あるいは、具体的に示されていないが、接続ボール162は、駆動ディスク144において駆動ディスクカップ166内にしっかりと付着され得、その結果、駆動ディスク144が付勢ばね140の圧力に対抗して近位に動くと、解除可能接続ボール162は、被駆動ディスク142において被駆動ディスクカップ164から出るように切り開くかまたはひょいと出る。この方法で、トルク制限機構140は、外科手術ステープリングデバイス10のアンビルアセンブリ22とステープルカートリッジ20との間で捕獲された組織の過剰圧縮を防ぐ。
【0050】
本開示のさらなる実施形態において、本体ハウジングおよびハンドルアセンブリは、電動アクチュエータを組み込み得、電源に接続されるかまたは本体ハウジングおよびハンドルアセンブリ内に電源を組み込み得る。動力、電動のデバイスの実施例は、国際公開第WO09/039506号および米国特許第7,032,798号に開示され、これらの開示は、その全体が参照によって本明細書により本明細書に援用される。上記に考察された手動動力デバイスは、ハンドルの旋回運動をアンビル保持シャフトの直線運動に変換する。電動デバイスは、回転運動を生成し得、回転運動は次いで、組織をクランプし、ステープルを発射し、かつ/または組織を切断するために直線運動に変換される。
【0051】
本明細書に開示される実施形態に様々な修正がなされ得ることは理解される。例えば、複数摩擦プレート、磁気係合機構など代替の切断機構が備え付けられ得る。さらに、開示されるトルク制限機構は、組織圧縮構造を組み込む任意の外科手術器具において用途を見出し得る。さらに、開示されるトルク制限機構は、外科手術器具に用いるために異なる範囲の係合圧力を有するモジュラーおよび交換可能な構成要素として備え付けられ得る。その上、ハンドルアセンブリからデバイスの遠位端に延びる細長いシャフトを有する1つ以上の取り外し可能アダプタが用いられ得る。そのようなアダプタは、可撓性のシャフト、湾曲した形状または他の形状を有し得、様々なエンドエフェクタに接続するように設計され得る。そのようなアダプタはまた、手動駆動のハンドルアセンブリ、電動アクチュエータ、またはその両方に接続されるように設計され得る。アダプタは、米国特許第7,922,063号に開示され、その開示は、その全体が参照によって本明細書により本明細書に援用される。従って、上記の説明は、限定することとして解釈されるべきではなく、単に特定の実施形態の例証として解釈されるべきである。当業者は、本明細書に添付される特許請求の範囲および精神内において他の修正形態を想定する。
【符号の説明】
【0052】
10 外科手術ステープリングデバイス
12 ハンドルアセンブリ
14 本体部分
16 ヘッドアセンブリ
18 遠位端
20 ステープルカートリッジ
22 アンビルアセンブリ
24 アンビルプレート
26 アンビルシャフト
30 接近させるノブ
32 本体ハウジング
【技術分野】
【0001】
(背景)
(1.技術分野)
本開示は、組織クランピング構造を組み込んだ外科手術器具と共に用いる力制限機構に関する。より詳細には、本開示は、外科手術ステープリング器具において用いられる組織圧縮制限機構に関する。
【背景技術】
【0002】
(2.関連技術の背景)
吻合は、分離した空洞器官切開面の外科手術的結合である。典型的には、吻合処置は、空洞組織の病気または欠陥の切開面が除去され、残りの端部切開面が結合される外科手術の後に続く。所望の吻合処置に従って、端部切開面は、円形、端部対側部または側部対側部の器官再建方法によって結合され得る。
【0003】
円形の吻合処置において、器官切開面の2つの端部は、ステープリング器具によって結合され、ステープリング器具は、各器官切開部の端部切開面を通って円形配列のステープルを駆動し、同時に駆動された円形配列のステープルの任意の組織内部の芯を抜いて、管状の通路を空ける。空洞の器官の円形吻合を行う器具の実施例は、特許文献1、特許文献2、特許文献3、特許文献4、特許文献5、特許文献6、特許文献7および特許文献8に説明され、これらの各々は、その全体が参照によって本明細書に援用される。典型的には、これらの器具は、近位端に器具を作動させるためのハンドルと、遠位端に配置されるステープル保持構成要素とを有する細長いシャフトを含む。アンビルヘッドが取り付けられたアンビルロッドを含むアンビルアセンブリは、ステープル保持構成要素に隣接して遠位端に取り付けられる。ステープリングされるべき器官の組織の向かい合う端部分は、アンビルヘッドとステープル保持構成要素との間でクランプされる。クランプされた組織は、ステープル保持構成要素からの複数のステープルを駆動することによってステープリングされ、その結果、ステープルの端部は、組織を通過し、アンビルヘッドによって変形させられる。
【0004】
使用時、ステープル保持構成要素およびアンビルアセンブリは、結合されるべき器官の向かい合う組織切開面内に位置を決められ、接近させられて、ステープリングする位置に向かい合う組織切開面を引き込む。このことは、向かい合う組織切開面を一緒にして圧縮する。現在のデバイスは、器具が設定された接近状態に達するまでオペレータが組織切開面を圧縮することに依存する。設定された接近状態に達して組織を過度に圧縮すると、組織損傷または制限された血流は、組織壊死を引き起こし得る。組織が十分な圧縮によってクランプされない場合、吻合接合部において出血および/または漏れのより大きい傾向がある。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】米国特許第7,303,106号明細書
【特許文献2】米国特許第6,053,390号明細書
【特許文献3】米国特許第5,588,579号明細書
【特許文献4】米国特許第5,119,983号明細書
【特許文献5】米国特許第5,005,749号明細書
【特許文献6】米国特許第4,646,745号明細書
【特許文献7】米国特許第4,576,167号明細書
【特許文献8】米国特許第4,473,077号明細書
【発明の概要】
【発明が解決しようとする課題】
【0006】
従って、過度の組織圧縮を防ぐ圧縮制限機構を有する外科手術ステープラに対するニーズがある。さらに、組織切開面に加えられる圧縮の量をユーザが事前選択することを可能にするユーザ選択可能圧縮制限機構を有する外科手術ステープリング器具に対するニーズがある。
【課題を解決するための手段】
【0007】
(概要)
外科手術器具に用いられる力またはトルク制限機構が提供される。トルク制限機構は、概して、外科手術器具の接近させる機構と係合可能な被駆動部材であって、被駆動部材は被駆動表面を有する、被駆動部材と、駆動部材であって、被駆動部材の被駆動表面と係合可能な駆動表面を有する、駆動部材とを有する。駆動部材は、器具のクランピングアクチュエータに接続される。駆動部材の駆動表面は、所定の係合圧力で被駆動部材の被駆動表面に対して滑る。機構は、駆動部材によって被駆動部材に加えられる圧力を調整する部材を有するトルク制御器を有する。
【0008】
ある好ましい実施形態において、駆動部材は、被駆動部材に対して回転可能である。駆動表面は、被駆動表面を摩擦で係合し得る。ある実施形態において、駆動表面および被駆動表面は、相互係合する構造を有する。特定の実施形態において、駆動表面および被駆動表面は、相互係合する歯を有する。
【0009】
さらなる代替の実施形態において、相互係合する構造は、デテント機構である。デテント機構は、駆動表面と被駆動表面との間に位置を決められる少なくとも1つの可動コネクタを含む。より特定の実施形態において、駆動表面および被駆動表面のうちの少なくとも1つは、カップを含み、該駆動表面および被駆動表面のうちのもう一方は、カップと取り外し可能で係合可能なボールを支持する。
【0010】
開示されるトルク制限機構は、駆動部材が被駆動部材と係合するように付勢されるばねであるように、駆動部材と係合可能なばねをさらに含む。
【0011】
トルク制御器が備え付けられ、トルク制御器は、付勢ばねと係合可能であり、付勢ばねによって駆動部材に加えられる圧力の量を事前設定する。トルク制御器は、付勢ばねおよびスライド部材と係合可能なフックを含む。
【0012】
本体部分と、本体部分に取り付けられる第1のクランピング部材および第1のクランピング部材に対して可動な第2のクランピング部材とを含む外科手術器具もまた提供される。第1のクランピング部材に対して第2のクランピング部材を動かす接近させる機構が提供される。接近させる機構は、長手方向に可動な打込みねじであって、そこに形成される螺旋形溝を有する、打込みねじと、打込みねじの周りに取り付けられる回転可能スリーブとを含む。回転可能スリーブは、回転可能スリーブの回転が本体部分内において打込みねじを長手方向に並進させるように螺旋形溝の中に延びる打込みピンを含む。
【0013】
本体部分内にトルク制限機構が提供され、トルク制限機構は、制限機構の少なくとも一部分が所定の係合圧力で回転可能スリーブに対して滑るように係合可能である。トルク制限機構は、回転可能スリーブに付着された被駆動表面と、被駆動表面と係合可能な駆動表面とを含む。
【0014】
一実施形態において、駆動表面は、被駆動表面を摩擦で係合する。代替の実施形態において、駆動表面および被駆動表面は、相互係合構造を有する。特定の実施形態において、駆動表面および被駆動表面は、相互係合歯を有する。
【0015】
さらなる代替の実施形態において、相互係合構造は、デテント機構であり、駆動表面および被駆動表面のうちの少なくとも1つは、カップを含み、駆動表面および被駆動表面のうちのもう一方は、カップと取り外し可能で係合可能なボールを支持する。
【0016】
外科手術器具は、駆動部材と係合可能なばねをさらに含む。駆動部材は、被駆動部材と係合するように付勢されるばねである。
【0017】
外科手術器具の第1のクランピング部材と第2のクランピング部材との間の組織の過剰圧縮を防ぐ方法がさらに開示される。方法は、本体部分と、本体部分に取り付けられる第1のクランピング部材および第1のクランピング部材に対して可動な第2のクランピング部材とを有する外科手術器具を提供することを含む。第1のクランピング部材に対して第2のクランピング部材を動かす接近させる機構が提供される。接近させる機構は、長手方向に可動な打込みねじであって、そこに形成される螺旋形溝を有する、打込みねじと、打込みのねじの周りに取り付けられる回転可能スリーブとを含む。
【0018】
回転可能スリーブは、回転可能スリーブの回転が本体部分内において打込みねじを長手方向に並進させるように螺旋形溝の中に延びる打込みピンを含む。トルク制限機構が提供され、トルク制限機構は回転可能スリーブと係合可能である。接近させるノブは、本体部分に回転可能で取り付けられ、トルク制限機構と係合可能である。
【0019】
方法は、トルク制限機構の少なくとも一部分が所定の係合圧力で回転可能スリーブに対して滑るように接近させるノブを回転させて回転可能スリーブを回転させるステップをさらに含む。
【0020】
例えば、本発明は以下の項目を提供する。
(項目1)
組織を圧縮する外科手術器具に用いるトルク制限機構であって、
外科手術器具の接近させる機構と係合可能な被駆動部材であって、該被駆動部材は被駆動表面を有する、被駆動部材と、
該被駆動部材の該被駆動表面と係合可能な駆動表面を有し、該器具のクランピングアクチュエータに接続されている駆動部材であって、該駆動部材の該駆動表面は、所定の係合圧力で該被駆動部材の該被駆動表面に対して滑る、駆動部材と、
該駆動部材によって該被駆動部材に加えられる圧力を調整する部材を有するトルク制御器と
を備えている、トルク制限機構。
(項目2)
駆動部材は、上記被駆動部材に対して回転可能である、上記項目のいずれかに記載のトルク制限機構。
(項目3)
上記駆動表面は、上記被駆動表面を摩擦で係合する、上記項目のいずれかに記載のトルク制限機構。
(項目4)
上記駆動表面および上記被駆動表面は、相互係合する構造を有する、上記項目のいずれかに記載のトルク制限機構。
(項目5)
上記駆動表面および上記被駆動表面は、相互係合する歯を有する、上記項目のいずれかに記載のトルク制限機構。
(項目6)
上記相互係合する構造は、デテント機構である、上記項目のいずれかに記載のトルク制限機構。
(項目7)
上記駆動表面と上記被駆動表面との間に少なくとも1つの可動コネクタをさらに備えている、上記項目のいずれかに記載のトルク制限機構。
(項目8)
上記駆動表面および被駆動表面のうちの少なくとも1つは、カップを含み、該駆動表面および被駆動表面のうちのもう一方は、該カップと取り外し可能で係合可能なボールを支持する、上記項目のいずれかに記載のトルク制限機構。
(項目9)
上記駆動部材と係合可能なばねをさらに備え、該駆動部材は、上記被駆動部材と係合するように付勢されるばねである、上記項目のいずれかに記載のトルク制限機構。
(項目10)
上記トルク制御器の部材は、上記付勢ばねと係合する、上記項目のいずれかに記載のトルク制限機構。
(項目11)
上記トルク制御器は、上記付勢ばねおよびスライド部材と係合可能なフックを含む、上記項目のいずれかに記載のトルク制限機構。
(項目12)
本体部分と、
該本体部分に取り付けられる第1のクランピング部材および該第1のクランピング部材に対して可動な第2のクランピング部材と、
該第1のクランピング部材に対して該第2のクランピング部材を動かす接近させる機構であって、該接近させる機構は、長手方向に可動な打込みねじであって、そこに形成される螺旋形溝を有する、打込みねじと、該打込みねじの周りに取り付けられる回転可能スリーブとを含み、該回転可能スリーブは、該回転可能スリーブの回転が該本体部分内において該打込みねじを長手方向に並進させるように該螺旋形溝の中に延びる打込みピンを含む、接近させる機構と、
該回転可能スリーブと係合可能なトルク制限機構であって、該トルク制限機構の少なくとも一部分は所定の係合圧力で該回転可能スリーブに対して滑る、トルク制限機構と
を備えている、外科手術器具。
(項目13)
上記トルク制限機構は、上記回転可能スリーブに付着された被駆動表面と、該被駆動表面と係合可能な駆動表面とを含む、上記項目のいずれかに記載の外科手術器具。
(項目14)
上記駆動表面は、上記被駆動表面を摩擦で係合する、上記項目のいずれかに記載の外科手術器具。
(項目15)
上記駆動表面および上記被駆動表面は、相互係合構造を有する、上記項目のいずれかに記載の外科手術器具。
(項目16)
上記駆動表面および上記被駆動表面は、相互係合歯を有する、上記項目のいずれかに記載の外科手術器具。
(項目17)
上記相互係合構造は、デテント機構である、上記項目のいずれかに記載の外科手術器具。
(項目18)
上記駆動表面および被駆動表面のうちの少なくとも1つは、カップを含み、該駆動表面および被駆動表面のうちのもう一方は、該カップと取り外し可能で係合可能なボールを支持する、上記項目のいずれかに記載の外科手術器具。
(項目19)
上記駆動部材と係合可能なばねをさらに備え、該駆動部材は、上記被駆動部材と係合するように付勢されるばねである、上記項目のいずれかに記載の外科手術器具。
(項目20)
外科手術器具の第1のクランピング部材と第2のクランピング部材との間の組織の過剰圧縮を防ぐ方法であって、
外科手術器具を提供することであって、該外科手術器具は、本体部分と、該本体部分に取り付けられる第1のクランピング部材および該第1のクランピング部材に対して可動な第2のクランピング部材と、
該第1のクランピング部材に対して該第2のクランピング部材を動かす接近させる機構であって、該接近させる機構は、長手方向に可動な打込みねじであって、そこに形成される螺旋形溝を有する、打込みねじと、該打込みのねじの周りに取り付けられる回転可能スリーブとを含み、該回転可能スリーブは、該回転可能スリーブの回転が該本体部分内において該打込みねじを長手方向に並進させるように該螺旋形溝の中に延びる打込みピンと、該回転可能スリーブと係合可能な接近させるノブとを含む、接近させる機構と、
該回転可能スリーブと係合可能なトルク制限機構と
を含む、外科手術器具を提供することと、
該トルク制限機構の少なくとも一部分が所定の係合圧力で該回転可能スリーブに対して滑るように該接近させるノブを回転させて回転可能スリーブを回転させることと
を包含する、方法。
【0021】
(摘要)
組織クランピング外科手術器具に用いられるトルク制限機構が提供される。トルク制限機構は、概して、外科手術器具の接近させる機構と係合可能な被駆動部材であって、被駆動部材は被駆動表面を有する、被駆動部材と、駆動部材であって、被駆動部材の被駆動表面と係合可能な駆動表面を有する、駆動部材とを含む。駆動部材は、駆動部材の駆動表面が、所定の係合圧力で、被駆動部材の被駆動表面に対して滑るか、または被駆動部材の被駆動表面から係合解除されるように、被駆動部材に対して回転可能である。
【0022】
組織圧縮を制御するトルク制限機構を有する本開示される外科手術ステープラの様々な実施形態は、図面を参照して本明細書に開示される。
【図面の簡単な説明】
【0023】
【図1】図1は、組織圧縮を制御するトルク制限機構の一実施形態を組み込む外科手術ステープラの斜視図である。
【図2】図2は、部品が分離されている状態の、図1の外科手術ステープラのハンドル部分の斜視図である。
【図3】図3は、部品が分離されている状態の、図2のハンドル部分において利用されるトルク制限機構の斜視図である。
【図4】図4は、図3のトルク制限機構の斜視図である。
【図5】図5は、摩擦プレートまたは圧力プレートが係合されている状態の、図4のトルク制限機構の側面図である。
【図6】図6は、摩擦プレートが互いに対して滑っている状態の、図5に類似した側面図である。
【図7】図7は、図1の外科手術ステープラに用いられるトルク制限機構の代替の実施形態の斜視図である。
【図8】図8は、被駆動プレートおよび駆動プレートが係合されている状態の、図7のトルク制限機構の側面図である。
【図9】図9は、駆動プレートおよび被駆動プレートが係合解除されている状態の、図8に類似した図である。
【図10】図10は、図1の外科手術ステープラと共に用いられるトルク制限機構のさらなる代替の実施形態の斜視図である。
【図11】図11は、被駆動プレートおよび駆動プレートが係合されている状態の、図10のトルク制限機構の側面図である。
【図12】図12は、駆動プレートおよび被駆動プレートが係合解除されている状態の、図11に類似した図である。
【発明を実施するための形態】
【0024】
(実施形態の詳細な説明)
組織圧縮制限機構を組み込んだ本開示される外科手術ステープリングデバイスの複数の実施形態は、図面を参照してここで詳細に説明され、図面において、類似の数字は、いくつかの図の各々において同一かまたは対応する要素を示す。当技術分野において一般的であるように、用語「近位」は、ユーザまたはオペレータ、すなわち外科医または内科医に、より近い部分または構成要素をいい、一方、用語「遠位」は、ユーザからより遠くに離れた部分または構成要素をいう。
【0025】
最初に図1を参照すると、外科手術ステープリングデバイス10が開示される。外科手術ステープリングデバイス10は、円形ステープラである。外科手術ステープリングデバイス10は、概してハンドルアセンブリ12と、ハンドルアセンブリ12から遠位に延びる細長い本体部分14とを含む。動作可能ヘッドアセンブリ16は、細長い本体部分14の遠位端18に取り付けられ、概して細長い本体部分14の遠位端18に取り付けられるステープルカートリッジ20と、より詳細に以下に説明される方法でステープルカートリッジ20に対して可動なアンビルアセンブリ22とを含む。アンビルアセンブリ22は、アンビルプレート24と、アンビルプレート24から近位に延びるアンビルシャフト26とを含む。可動アンビルリテイナまたは保持シャフト28は、細長い本体部分14の遠位端18から延び、アンビルシャフト26を取り外し可能で受容するように備え付けられる。接近させるノブ30は、ハンドルアセンブリ12の本体ハウジング32に回転可能で取り付けられ、ステープルカートリッジ20に対してアンビルアセンブリ22を動かして、組織を掴み、圧縮するように動作可能である。
【0026】
トリガ34は、本体ハウジング32のトリガ延長部36に可動で取り付けられる。トリガ34の作動は、ステープルカートリッジ20からアンビルプレート24の中にステープル(図示されていない)を排出するように機能を果たす。トリガロック38は、本体ハウジング32に可動で取り付けられ、トリガ34の邪魔にならないように手動で動かされるまでトリガ34の動きを阻止して、意図しない発射を防ぐように備え付けられる。ハンドルアセンブリおよび本体ハウジングは、米国特許第7,303,106号に開示されるように配置され得、この特許の開示は、その全体が参照によって本明細書により本明細書に援用される。‘106特許はまた、プッシャバック186と、円筒形ナイフ188と、ステープルガイド192とを有するアセンブリを開示する。プッシャバックは、プッシャリンク74に接続され、ステープルカートリッジから外科手術ステープルを発射する複数のプッシャフィンガを有する。
【0027】
トルク制限機構40は、本体ハウジング32内に含まれて、ステープルカートリッジ20とアンビルプレート24との間に捕獲される組織に加えられる圧縮の量を制御する。接近させるノブ30は、ステープルカートリッジ20とアンビルプレート24との間で圧縮された組織が所定のレベルの圧縮に達した場合、接近させるノブ30がアンビル保持シャフト28との係合がなくなって滑り、それによって、組織に対するいかなるさらなる圧縮も防ぐように、トルク制限機構40を係合可能である。トルク制限機構40は、以下に説明される方法で接近させるノブ30が滑るレベルを事前設定する、本体ハウジング32を通って延びるトルク制御器42を含む。インディシアプレート44は、トルク制御器42に隣接して本体ハウジング32に取り付けられ、接近させるノブ30の滑り点または滑り範囲をオペレータが事前設定することを可能にする数字インディシア46を含む。このようにして、外科医の経験は、ステープルまたはクランプされる組織の種類、患者の年齢、組織の状態または他の要因に従って器具を設定するために利用され得る。
【0028】
ここで図1および図2を参照すると、接近させるノブ30(図1)の回転に応答してステープルカートリッジ20に対してアンビルアセンブリ22を動かすために、外科手術ステープリング器具10は、ハンドルアセンブリ12の本体ハウジング32に取り付けられた打込みねじ48と回転可能スリーブ50とを含む。打込みねじ48は、本体ハウジング32内において長手方向に可動であり、アンビル保持シャフト28に接続される。打込みねじ48は、打込みねじ48の遠位端54を通って位置を決められるピン52を含み、打込みねじ48の遠位端54は、公知の方法でアンビル保持シャフト28に直接または間接的に接続される。例えば、湾曲した細長い本体部分14を通って長手方向運動を伝えるために、ピン52は、バンドの近位端(図示されていない)に接続され得、一方、バンドの遠位端は、米国特許第7,303,106号に、より詳細に説明される方法でアンビル保持シャフト28に接続され得、この特許の開示は、参照によって本明細書により本明細書に援用される。従って、本体ハウジング32内の打込みねじ48の長手方向の動きは、ステープルカートリッジ20に対するアンビルアセンブリ22の長手方向の動きを引き起こす。
【0029】
示されるように、本体ハウジング32は、相補的ハーフ(complementary halves)32aおよび32bとして備え付けられる。シール56は、細長い本体部分14を通っておよび本体ハウジング32から通気気体および他の流体が漏れることを防ぐために、打込みねじの遠位端54に形成される周囲溝58に備え付けられる。ねじストップ64は、本体ハウジング32内における打込みねじ48の長手方向の走行を制限するために、打込みねじ48の遠位端54に備え付けられる。螺旋形溝60は、打込みねじ48の近位部分62に備え付けられ、打込みねじ48を長手方向に動かすために回転可能スリーブ50によって係合される。
【0030】
具体的には、打込みねじ48は、回転可能スリーブ50内に形成されるボア66内に位置を決められる。拡大つば(enlarged collar)68は、本体ハウジング32内において回転可能スリーブ50を回転可能で支持する。回転可能スリーブ50のボア66内において長手方向に打込みねじ48を動かすために、打込みピン70は、拡大つば68を通って形成される穴72を通って延び、ボア66の中に延びる。打込みピン70は、打込みねじ48の近位部分62に形成される螺旋形溝60内において進む。従って、回転可能スリーブ50が本体ハウジング32内において回転させられると、打込みピン70は、螺旋形溝62内において進み、本体ハウジング32内において打込みねじ48を引きかつ/または前進させる。本明細書において上記に言及されたように、打込みねじ48は、アンビルアセンブリ22に接続される。本体ハウジング32内における打込みねじ48の長手方向の動きは、ステープルカートリッジ20に対してアンビルアセンブリ22の長手方向の動きを引き起こす。
【0031】
接近させるノブ30が回転させられると、回転力または回転トルクは、回転可能スリーブ50に加えられて、回転可能スリーブ50を回転させ、打込みねじ48における螺旋形溝60内において打込みピン70を動かす。回転力は、長手方向または直線の力に変換され、ステープルカートリッジ20の方にアンビルアセンブリ22を動かし、それによって、接近させるノブ30の回転に応答してアンビルとステープルカートリッジとの間に捕獲された組織を圧縮する。
【0032】
いかなる制御要因または制限要因もない場合、継続するトルクが回転可能スリーブ50に加えられると、増加する量の直線の力がアンビルアセンブリ22に伝えられるかまたは及ぼされ、それによって、アンビルアセンブリ22のアンビルプレート24とステープルカートリッジ20との間に捕獲された組織に増加する量の圧縮を加える。過剰圧縮または過少圧縮を防ぐために、トルク制限機構40が備え付けられ、回転可能スリーブ50に加えられるトルクの量、従ってアンビルアセンブリ22に加えられる直線の力の量を所定のレベルまたは調整可能レベルに制限する。
【0033】
ここで図2および図3を参照すると、本体ハウジング32(図2)内において回転可能スリーブ50を支持する拡大つば68は、回転可能スリーブ50の遠位端74に位置を決められる。外科医が回転可能スリーブ50を手動で回転させるために、回転可能スリーブ50の近位端76は、被駆動表面80を有する被駆動部材または被駆動ディスク78が備え付けられる。被駆動ディスク78は、トルク制限機構40の一部を形成する。上記に言及されたように、接近させるノブ30は、本体ハウジング32に備え付けられ、回転可能であり、アンビルアセンブリ22の動きを引き起こす。示されるように、トルク制限機構40は、接近させるノブ30と回転可能スリーブ50との間に位置を決められる。アンビルアセンブリ22に加えられる直線の力従って組織圧縮の量を制御するために、トルク制限機構40が、備え付けられ、回転可能スリーブ50に加えられる回転トルクの量を制限する。
【0034】
図2、図3および図4を参照すると、この実施形態において、トルク制限機構40は、駆動表面84を有する駆動部材または駆動ディスク82をさらに含む。回転可能スリーブ50を回転させるために、駆動表面84が、備え付けられ、被駆動ディスク78の被駆動表面80を摩擦で係合する。駆動部材または駆動ディスク82もまた、ノブ30に取り付けられる。駆動ディスク82は、駆動シャフト86に取り付けられる。駆動シャフト86は、駆動シャフト86の遠位端90に備え付けられるサポートディスク88を含む。サポートディスク88は、回転可能スリーブ50(図3および図4)に形成される周囲溝92内において回転可能で支持される。駆動シャフト86の近位端94は、接近させるノブ30に付着される。具体的には、駆動シャフト86の近位端94は、接近させるノブ30に形成される穴96内に固定される。従って、接近させるノブ30が回転させられると、トルク制限機構40の駆動ディスク82は、回転可能スリーブ50に備え付けられるトルク制限機構40の被駆動ディスク78を摩擦で係合し、回転させる。
【0035】
トルク制限機構40は、付勢ばね98をさらに含み、付勢ばね98は、駆動ディスク82を付勢して被駆動ディスク78を摩擦係合するために接近させるノブ30と駆動ディスク82との間に備え付けられる。駆動シャフト86は、駆動ディスク82における穴100を通って延びる。具体的には示されていないが、駆動ディスク82は、(ピンなどで)締められるかまたはさもなければ駆動シャフト86に取り付けられ、その結果、駆動ディスク82は、被駆動ディスク78から係合解除されるかまたは被駆動ディスク78に対して滑らされるために、駆動シャフト86と共に回転し、駆動シャフト86に沿って長手方向に自由に動く。
【0036】
本明細書において上記に言及されたように、トルク制御器42(図1および図2)は、ステープルカートリッジ20とアンビルアセンブリ22との間の組織に加えられる圧縮力の量を調整可能で制御するために、本体ハウジング32に備え付けられる。さしあたり図2を参照すると、トルク制御器42は、スライド102を含み、スライド102は、手で把持可能で、本体ハウジング32外に延び得、インディシアプレート44に隣接して位置を定められ得る。部材またはフック104は、スライド102から延び、付勢ばね98の、例えばコイル106、108などのコイルを係合して、駆動ディスク82に加えられるばね圧力の量を調整する。トルク制御器42は、駆動部材によって被駆動部材に加えられる圧力を調整する。この方法で、トルク制御器42は、駆動部材または駆動ディスク82によって被駆動部材または被駆動ディスク78に加えられる圧力の最大量を事前設定することが可能である。これは、回転可能スリーブ50に加えられるトルクの最大量、従ってステープルカートリッジ20とアンビルアセンブリ22との間に捕獲された組織に加えられる圧縮力の最大量を事前設定する。
【0037】
トルク制限機構40が駆動ディスク82を被駆動ディスク78と係合するように付勢する付勢ばね98を含むが、トルク制限機構40が付勢ばね98を省略し得ることは注意されるべきである。この構成において、被駆動ディスク78の被駆動表面80および駆動ディスク82の駆動表面84は、所定のトルク限界において被駆動ディスク78に対して駆動ディスク82が滑るように、所定の摩擦係数を有して製造され得る。
【0038】
ここで図1、図2、図5および図6を参照すると、回転可能スリーブ50に加えられる回転力またはトルクの量を制限するトルク制限機構40の使用法がここで説明される。最初に図1および図2を参照すると、トルク制御器42は、フック104が所望の量のプレロード圧力を付勢ばね98に加えるように調整される。これは、スライド102がインディシアプレート44上の適切な数字インディシア46と整列するまで、インディシアプレート44に対する滑りスライド102によって達成される。その後接近させるノブ30は、矢印A(図5)の方向に回転させられて、ステープルカートリッジ20の方にアンビルアセンブリ22を引き、それによって、第1の組織切開面T1および第2の組織切開面T2を圧縮して一緒にし、組織切開面をステープルされる位置にもっていく。
【0039】
特に図5を参照すると、矢印Aの方向への接近させるノブ30の回転は、矢印Bの方向に駆動ディスク82を回転させる。駆動ディスク82の被駆動ディスク70との摩擦係合は、矢印Cの方向に被駆動ディスク78を回転させ、それによって、回転可能スリーブ50を回転させて、上記に説明されたように組織切開部を圧縮する。
【0040】
ここで図6を参照すると、接近させるノブ30が回転させられ続けると、第1の組織切開面T1および第2の組織切開面T2の増加する圧縮は、打込みねじ48を通過する増加する量の直線の力、従って回転可能スリーブ50によって必要とされる増加する量の回転トルクを必要とする。付勢ばね98によって加えられトルク制御器42によって制御される所定の量の圧力において、被駆動ディスク78と駆動ディスク82との間の摩擦力は、打ち負かされ、駆動ディスク82が被駆動ディスク78に対して滑ることを可能にする。駆動ディスク82が被駆動ディスク78に対して滑ると、さらなる増加する量のトルクは回転可能スリーブ50に加えられないで、従ってさらなる増加する量の直線の力は打込みねじ48を介してアンビルアセンブリ22に伝えられない。この方法で、トルク制限機構40は、アンビルアセンブリ22とステープルカートリッジ20との間で捕獲された組織の過剰圧縮を防ぐ。
【0041】
ここで図7〜図9を参照すると、最初に図7に関して、本明細書において上記に説明された外科手術ステープリングデバイス10と共に用いるトルク制限機構110の代替の実施形態が開示される。上記に説明されたトルク制限機構40と同様に、トルク制限機構110は、概して回転可能スリーブ50の近位端76に備え付けられる被駆動部材または被駆動ディスク112と、駆動シャフト116に沿って長手方向に動くように取り付けられる駆動部材または駆動ディスク114とを含む。付勢ばね118は、駆動シャフト116の周りに備え付けられ、駆動ディスク114を付勢して、被駆動ディスク112を係合する。本明細書において上記に説明された駆動ディスク82と同様に、駆動ディスク114は、駆動シャフト116に沿って回転して動くように取り付けられ、付勢ばね118の付勢に対抗して駆動シャフト116に沿って長手方向に自由に動く。
【0042】
サポートディスク120は、駆動シャフト116の遠位端122に備え付けられ、回転可能スリーブ50における周囲溝92内において回転可能で支持される。駆動シャフト116の近位端124は、接近させるノブ30における穴96内に付着される。従って、接近させるノブ30の回転は、駆動シャフト116および従って駆動ディスク114を回転させる。この実施形態において、被駆動ディスク112は、複数の爪または被駆動歯126が備え付けられ、複数の爪または被駆動歯126は、駆動ディスク114に形成される複数の対応する爪または駆動ディスク歯128と機械的に相互係合可能(interengageable)である。被駆動ディスク歯126は、被駆動ディスク112に被駆動表面130を形成し、駆動ディスク歯128は、駆動ディスク114に駆動表面132を形成する。
【0043】
ここで図8および図9を参照すると、使用時、付勢ばね118は、駆動ディスク114を付勢して、被駆動ディスク112を係合する。具体的には、付勢ばね118は、駆動歯128を含む駆動表面132を付勢して、被駆動歯126を含む被駆動表面130を係合する。本明細書において上記に説明される方法と同一の方法で、トルク制御器42は、付勢ばね118によって駆動ディスク114に加えられる力の最大量を調整するために操作される。接近させるノブ30が回転させられると、駆動ディスク114上の駆動歯128は、被駆動ディスク112上の被駆動歯126と相互係合され、それによって回転可能スリーブ50を回転させる。本明細書において上記にさらに言及されたように、回転可能スリーブ50の回転は、ステープルカートリッジ20に対するアンビルアセンブリ22の長手方向の動きを引き起こし、それによって、組織を圧縮する。
【0044】
図9を特に参照すると、回転可能スリーブ50が回転させられると、組織間に存在する圧縮力により回転可能スリーブ50を回転させ続けるのに増加する量の力が必要とされる。接近させるノブ30の継続する回転は、必要とするトルクの量が付勢ばね118によって駆動ディスク114に加えられる圧力を超えるなどの時間まで回転可能スリーブ50にトルクを加え続ける。この時点で、駆動ディスク114は、駆動ディスク112に対して「滑り」、付勢ばね118の付勢に対抗して矢印Dの方向に近位に動く。具体的には、駆動ディスク114上の駆動歯128は、被駆動ディスク112上の被駆動歯126に対して滑るかまたは被駆動ディスク112上の被駆動歯126から係合解除され、それによって、回転可能スリーブ50に増加したトルクをさらに加えることを防ぐ。この方法で、トルク制限機構110は、アンビルアセンブリ22とステープルカートリッジ20との間に捕獲された組織の過剰圧縮を防ぐ。
【0045】
ここで図10〜図12を参照すると、最初に図10に関して、外科手術ステープリングデバイス10と共に用いるトルク制限機構140のさらなる代替の実施形態が開示される。上記に説明されたトルク制限機構40と同様に、トルク制限機構140は、概して回転可能スリーブ50の近位端76に備え付けられる被駆動部材または被駆動ディスク142と、駆動シャフト146に沿って長手方向に動くように取り付けられる円錐形駆動部材または円錐形駆動ディスク144とを含む。付勢ばね148は、駆動シャフト146の周りに備え付けられ、駆動ディスク144を付勢して、被駆動ディスク142を係合する。本明細書において上記に説明された駆動ディスク82と同様に、駆動ディスク144は、駆動シャフト146に沿って回転して動くように取り付けられ、付勢ばね148の付勢に対抗して駆動シャフト146に沿って長手方向に自由に動く。
【0046】
サポートディスク150は、駆動シャフト146の遠位端152に備え付けられ、回転可能スリーブ50における周囲溝92内において回転可能で支持される。駆動シャフト146の近位端154は、接近させるノブ30における穴96内に付着される。従って、接近させるノブ30の回転は、駆動シャフト146および従って駆動ディスク144を回転させる。この実施形態において、被駆動ディスク142は被駆動ディスク表面156を含み、駆動ディスク144は駆動ディスク表面158を含む。少なくとも1つの解除可能コネクタ160は、被駆動ディスク表面156と駆動ディスク表面158との間に備え付けられる。事前設定量のトルクが回転可能スリーブ50に加えられると、解除可能コネクタ160は、被駆動表面156および/または駆動ディスク表面158に対して滑る。
【0047】
この特定の実施形態において、解除可能コネクタ160は、複数の接続ボール162の形式である。被駆動ディスク142の被駆動ディスク表面156は複数の被駆動ディスクカップ164を含み、駆動ディスク144の駆動ディスク表面158は複数の対応する駆動ディスクカップ166を含む。接続ボール162は、被駆動ディスクカップ164と駆動ディスクカップ166との間で可動で支持される。接続ボール162は、駆動ディスク144上の付勢ばね148の付勢圧力によって、駆動ディスクカップ164と被駆動ディスクカップ166との間で維持される。
【0048】
ここで図11および図12を参照すると、使用時、接近させるノブ30は、駆動ディスク144が接続ボール162を介して被駆動ディスク142を回転させるように回転させられる。被駆動ディスク142の回転は、対応して回転可能スリーブ50を回転させ、それによって、アンビルアセンブリ22とステープルカートリッジ20との間で長手方向の動きを引き起こす(図1)。アンビルアセンブリ22がステープルカートリッジ20の方に動き、アンビルアセンブリ22とステープルカートリッジ20との間にある組織を圧縮すると、増加する量の回転力またはトルクが、回転可能スリーブ50に加えられるのに必要とされる。
【0049】
図12に最も良く示されるように、回転可能スリーブ50の回転を継続するために、増加する量の回転力が、接近させるノブ30に加えられるのに必要とされる。回転可能スリーブ50の回転を継続するのに必要とする力がトルク制御器42によって事前設定された力を超えた場合、駆動ディスク144は、付勢ばね148の付勢に対応して近位に動く。このことは、接続ボール162を駆動ディスクカップ166から出すように切り開くか(slit)または「ひょいと出し(pop)」、それによって、被駆動ディスク142に加えられるいかなるさらなる回転力も除去する。あるいは、具体的に示されていないが、接続ボール162は、駆動ディスク144において駆動ディスクカップ166内にしっかりと付着され得、その結果、駆動ディスク144が付勢ばね140の圧力に対抗して近位に動くと、解除可能接続ボール162は、被駆動ディスク142において被駆動ディスクカップ164から出るように切り開くかまたはひょいと出る。この方法で、トルク制限機構140は、外科手術ステープリングデバイス10のアンビルアセンブリ22とステープルカートリッジ20との間で捕獲された組織の過剰圧縮を防ぐ。
【0050】
本開示のさらなる実施形態において、本体ハウジングおよびハンドルアセンブリは、電動アクチュエータを組み込み得、電源に接続されるかまたは本体ハウジングおよびハンドルアセンブリ内に電源を組み込み得る。動力、電動のデバイスの実施例は、国際公開第WO09/039506号および米国特許第7,032,798号に開示され、これらの開示は、その全体が参照によって本明細書により本明細書に援用される。上記に考察された手動動力デバイスは、ハンドルの旋回運動をアンビル保持シャフトの直線運動に変換する。電動デバイスは、回転運動を生成し得、回転運動は次いで、組織をクランプし、ステープルを発射し、かつ/または組織を切断するために直線運動に変換される。
【0051】
本明細書に開示される実施形態に様々な修正がなされ得ることは理解される。例えば、複数摩擦プレート、磁気係合機構など代替の切断機構が備え付けられ得る。さらに、開示されるトルク制限機構は、組織圧縮構造を組み込む任意の外科手術器具において用途を見出し得る。さらに、開示されるトルク制限機構は、外科手術器具に用いるために異なる範囲の係合圧力を有するモジュラーおよび交換可能な構成要素として備え付けられ得る。その上、ハンドルアセンブリからデバイスの遠位端に延びる細長いシャフトを有する1つ以上の取り外し可能アダプタが用いられ得る。そのようなアダプタは、可撓性のシャフト、湾曲した形状または他の形状を有し得、様々なエンドエフェクタに接続するように設計され得る。そのようなアダプタはまた、手動駆動のハンドルアセンブリ、電動アクチュエータ、またはその両方に接続されるように設計され得る。アダプタは、米国特許第7,922,063号に開示され、その開示は、その全体が参照によって本明細書により本明細書に援用される。従って、上記の説明は、限定することとして解釈されるべきではなく、単に特定の実施形態の例証として解釈されるべきである。当業者は、本明細書に添付される特許請求の範囲および精神内において他の修正形態を想定する。
【符号の説明】
【0052】
10 外科手術ステープリングデバイス
12 ハンドルアセンブリ
14 本体部分
16 ヘッドアセンブリ
18 遠位端
20 ステープルカートリッジ
22 アンビルアセンブリ
24 アンビルプレート
26 アンビルシャフト
30 接近させるノブ
32 本体ハウジング
【特許請求の範囲】
【請求項1】
組織を圧縮する外科手術器具に用いるトルク制限機構であって、
外科手術器具の接近させる機構と係合可能な被駆動部材であって、該被駆動部材は被駆動表面を有する、被駆動部材と、
該被駆動部材の該被駆動表面と係合可能な駆動表面を有し、該器具のクランピングアクチュエータに接続されている駆動部材であって、該駆動部材の該駆動表面は、所定の係合圧力で該被駆動部材の該被駆動表面に対して滑る、駆動部材と、
該駆動部材によって該被駆動部材に加えられる圧力を調整する部材を有するトルク制御器と
を備えている、トルク制限機構。
【請求項2】
駆動部材は、前記被駆動部材に対して回転可能である、請求項1に記載のトルク制限機構。
【請求項3】
前記駆動表面は、前記被駆動表面を摩擦で係合する、請求項2に記載のトルク制限機構。
【請求項4】
前記駆動表面および前記被駆動表面は、相互係合する構造を有する、請求項2に記載のトルク制限機構。
【請求項5】
前記駆動表面および前記被駆動表面は、相互係合する歯を有する、請求項4に記載のトルク制限機構。
【請求項6】
前記相互係合する構造は、デテント機構である、請求項4に記載のトルク制限機構。
【請求項7】
前記駆動表面と前記被駆動表面との間に少なくとも1つの可動コネクタをさらに備えている、請求項6に記載のトルク制限機構。
【請求項8】
前記駆動表面および被駆動表面のうちの少なくとも1つは、カップを含み、該駆動表面および被駆動表面のうちのもう一方は、該カップと取り外し可能で係合可能なボールを支持する、請求項6に記載のトルク制限機構。
【請求項9】
前記駆動部材と係合可能なばねをさらに備え、該駆動部材は、前記被駆動部材と係合するように付勢されるばねである、請求項2に記載のトルク制限機構。
【請求項10】
前記トルク制御器の部材は、前記付勢ばねと係合する、請求項9に記載のトルク制限機構。
【請求項1】
組織を圧縮する外科手術器具に用いるトルク制限機構であって、
外科手術器具の接近させる機構と係合可能な被駆動部材であって、該被駆動部材は被駆動表面を有する、被駆動部材と、
該被駆動部材の該被駆動表面と係合可能な駆動表面を有し、該器具のクランピングアクチュエータに接続されている駆動部材であって、該駆動部材の該駆動表面は、所定の係合圧力で該被駆動部材の該被駆動表面に対して滑る、駆動部材と、
該駆動部材によって該被駆動部材に加えられる圧力を調整する部材を有するトルク制御器と
を備えている、トルク制限機構。
【請求項2】
駆動部材は、前記被駆動部材に対して回転可能である、請求項1に記載のトルク制限機構。
【請求項3】
前記駆動表面は、前記被駆動表面を摩擦で係合する、請求項2に記載のトルク制限機構。
【請求項4】
前記駆動表面および前記被駆動表面は、相互係合する構造を有する、請求項2に記載のトルク制限機構。
【請求項5】
前記駆動表面および前記被駆動表面は、相互係合する歯を有する、請求項4に記載のトルク制限機構。
【請求項6】
前記相互係合する構造は、デテント機構である、請求項4に記載のトルク制限機構。
【請求項7】
前記駆動表面と前記被駆動表面との間に少なくとも1つの可動コネクタをさらに備えている、請求項6に記載のトルク制限機構。
【請求項8】
前記駆動表面および被駆動表面のうちの少なくとも1つは、カップを含み、該駆動表面および被駆動表面のうちのもう一方は、該カップと取り外し可能で係合可能なボールを支持する、請求項6に記載のトルク制限機構。
【請求項9】
前記駆動部材と係合可能なばねをさらに備え、該駆動部材は、前記被駆動部材と係合するように付勢されるばねである、請求項2に記載のトルク制限機構。
【請求項10】
前記トルク制御器の部材は、前記付勢ばねと係合する、請求項9に記載のトルク制限機構。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2012−232110(P2012−232110A)
【公開日】平成24年11月29日(2012.11.29)
【国際特許分類】
【出願番号】特願2012−84048(P2012−84048)
【出願日】平成24年4月2日(2012.4.2)
【出願人】(501289751)タイコ ヘルスケア グループ リミテッド パートナーシップ (320)
【Fターム(参考)】
【公開日】平成24年11月29日(2012.11.29)
【国際特許分類】
【出願日】平成24年4月2日(2012.4.2)
【出願人】(501289751)タイコ ヘルスケア グループ リミテッド パートナーシップ (320)
【Fターム(参考)】
[ Back to top ]