
制御グリッドを具えたローラベルト分別装置
物品(p)間でぶつかることなしに物品の質量流れを分別するための装置及び方法。この装置は、ベルト(28)の移動方向に対して横方向に選択的に回転可能な複数の物品支持ベルトローラ(30)を有する分別コンベヤ(20)有する。制御システム(30)は、コンベヤ(20)の搬送路に沿って形成される個々のグリッドセル(38)で選択的に回転する。制御システムは、流入する質量流れの画像を形成し、各パッケージに関する分別コンベヤに沿った経路を計算し、経路にしたがって各グリッドセルを通過するベルトローラ(30)を起動且つ停止させ、分別コンベヤ(20)から脇に離すよう物品(p)を規則的且つ迅速に振り分ける。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、一般に、動力駆動コンベヤに関し、特に、ベルトが通過するグリッド状に配置された個々の制御セルで選択的に回転する物品支持ローラを有するコンベヤベルトを用いた分別システムに関する。
【背景技術】
【0002】
シューソーター、押し棒、及び分別レールを使用して、コンベヤ上のパッケージ及び他の物品を分別する。高密度のパッケージ流れでは、多くの場合、分別の前に、並ぶようパッケージを整列させ、1つのパッケージが他のものがコンベヤから出るのを遮らないようにすることが必要である。しかしながら、分別する前にパッケージを整列させるために使用するコンベヤは場所を取ってしまう。そして、塊の流れにおける様々な大きさ及び向きのパッケージの整列は、特に高い通過量の速さで難しい。
【0003】
このため、据え付け面積を多く取らずに、高い通過量速さで様々なパッケージの大きさを分別できる分別機の必要がある。
【発明の概要】
【0004】
このような必要性及び他の必要性は、分別コンベヤ及び制御システムを有する本発明の態様を実施する分別システムによって、対処される。分別コンベヤは、ベルトの移動方向に前進するコンベヤベルトを有する。ベルトは、ベルトの移動方向に対して横方向に回転できるベルトローラを支持する物品を有する。また、分別コンベヤは、個々に制御されるグリッドセルの複数の行及び列のグリッド状に配置された制御要素を有する。制御要素は、グリッドセルを通過する際に、ベルトローラを選択的に回転させる。制御システムは、ベルトに入る各物品の大きさ及び位置を検出するための手段を有する。コンベヤベルトに沿った経路が、経路を計算することによってベルトに入る際のその大きさ及び位置に基づいて、各物品について計算される。各グリッドセルは、経路にしたがって選択的に制御され、経路に沿って分別コンベヤの向こう側に向けて横方向に物品を分別する。
【0005】
本発明の別の態様では、物品の流れを分別するための方法が、(a)ベルトの移動方向に進むコンベヤベルトのベルトローラ上の物品の流れを受け取るステップと;(b)コンベヤベルトに入る際に物品の画像を取得してその大きさ及び位置を判断するステップと;(c)物品の大きさ及び位置から、各物品に関する経路を計算するステップと;(d)ベルトローラを選択的に動作させて、この経路にしたがってベルトの移動方向に対して横方向に回転させるステップと;を具える。このような方法において、物品が経路に沿ってコンベヤベルトの向こう側に向けて分別される。
【0006】
分別コンベヤの別のバージョンが、個々に制御されるグリッドセルの複数の行及び列のグリッド状に配置されたローラを有する分別コンベヤベルトを有する。制御システムは、分別コンベヤに入る各物品の大きさ及び位置を判断し、物品の大きさ及び位置から、分別コンベヤに沿って各物品についての経路を計算し、各物品について計算される経路にしたがって各グリッドセルのローラを選択的に制御し、この経路に沿って分別コンベヤの向こう側に物品を分別するようローラを作動させる。
【図面の簡単な説明】
【0007】
以下の説明、添付の特許請求の範囲、及び添付図面を参照することによって、これらの特徴及び態様が、その効果とともに、より良く理解される。
【0008】
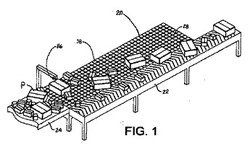
【図1】図1は、本発明の態様を実施する分別システムの等角図である。
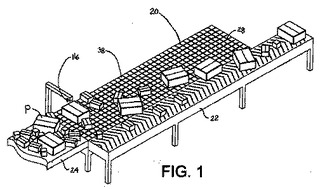
【図2】図2は、図1の分別システムの平面図である。
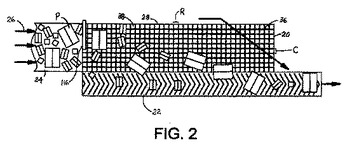
【図3】図3は、図1の分別システムの分別コンベヤの一部の平面図である。
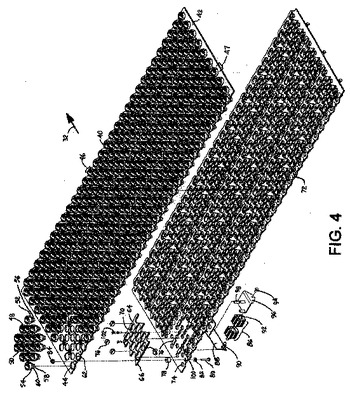
【図4】図4は、図1に示す分別システムのための動作グリッドの上部の部分的に分解した等角図である。
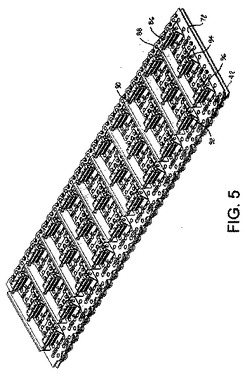
【図5】図5は、図4の動作グリッドの下部の等角図である。
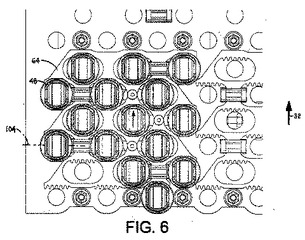
【図6】図6は、停止位置にある図4の動作グリッドのグリッドセルの拡大平面図である。
【図7】図7は、停止位置にある図6のグリッドセルの拡大底面図である。
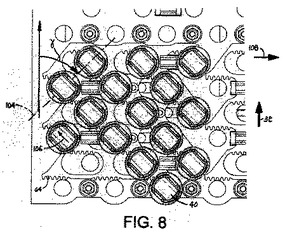
【図8】図8は、グリッドセルが動作位置にある図6の拡大平面図である。
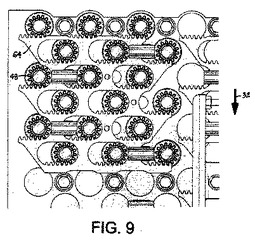
【図9】図9は、グリッドセルが動作位置にある図7に示すような拡大図である。
【図10】図10は、図1の分別システムで使用可能な制御システムのブロック図である。
【図11】図11A−11Eは、図1の分別システムの分別コンベヤベ上のパッケージの一例の構成に関する制御シーケンスを示す。
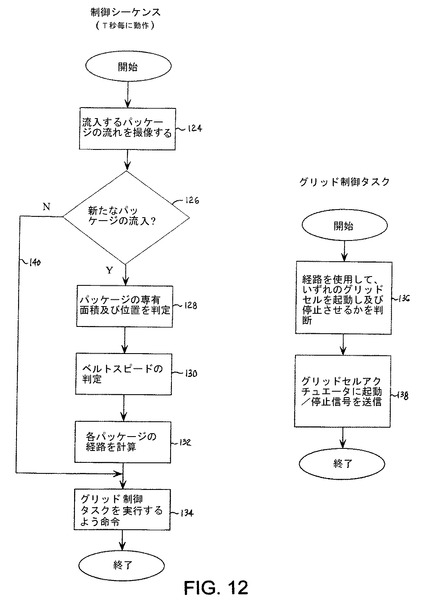
【図12】図12は、図1の分別システムの制御システムで使用可能な制御ロジックの一バージョンのフローチャートである。
【発明を実施するための形態】
【0009】
本発明の形態を実施する分別システムを図1及び図2に示す。箱又はパッケージPといった流入する様々な物品のマスフローが、分別コンベヤ20で分別され、隣接する流出単一化コンベヤ22に移送される。ランダムに向き且つ位置するパッケージのマスフローが、搬送方向26に前進する送込コンベヤ24によって分別コンベヤに供給される。送込コンベヤは、動力ローラコンベヤ、平ベルト、モジュール式コンベヤベルト、傾斜台等として理解される。分別コンベヤは、搬送方向であるベルトの移動方向32に対して直交する又は横方向の軸31を回転するよう構成されたパッケージ支持ローラ30(図3)を有するコンベヤベルト28を具える。パッケージ支持ベルトローラは矢印34の方向に能動的に回転して、単一化コンベヤ22に向かってパッケージを振り分ける。
【0010】
分別コンベヤベルト28の横ローラが、分別コンベヤの搬送路に沿って行R及び列Cに構成された、個々に動作するゾーンのグリッド36又はグリッドセル38で選択的に回転する。一実施例では、分別コンベヤベルト28のローラ30が、ベルトがベルトの移動方向に前進する際に、ベルトの下にあるベアリング面に接触するよう回転することによって回転し得るように、ベルトの厚さ方向に延びている。このようなベルトの一例は、米国ルイジアナ州ハラハンのIntralox,L.L.C.によって製造且つ販売されるIntralox(登録商標)Series 7000ベルトである。
【0011】
ベルトの下にあるベアリング面の一部の分解図を図4に示す。ベルトローラは、制御要素−本実施例では、搬送路に沿って配置される振分ローラ40−の配列の上で支持されている。振分ローラの周囲面はベアリング面として機能する。
【0012】
振分ローラが、自身がコンベヤのフレーム(図示せず)に取り付けられる搬送路パン42に取り付けられている。このパンは、長手方向の列46及び水平方向又は横方向の行47で構成される、複数の円形の開口44によって穴が開けられている。開口の列は、ベルトローラの横方向位置に対して横方向に揃っている。各開口は、ベルトがベルトの移動方向に前進する際に、対応する列のベルトローラに係合する自由に回転可能な振分ローラ40を支持するカートリッジ48を回転可能に受容する。ベルトローラと振分ローラとの間の転がり接触により、それらの軸が互いに傾いている限り、それら双方が互いに転がり且つ回転する。
【0013】
振分ローラカートリッジ48は、振分ローラ40の穴に受容される軸の端部を支持する直径方向に対向する穴52を具えた保持リング50を有する。穴の1つは、カートリッジ及び振分ローラの中に軸を挿入できるスルーホールとし、他の穴は、軸に対する末端を形成する盲端を有し得る。このような方法では、振分ローラが、ローラの突出部が保持リングの上部を超えて突出する状態で、固定軸に沿ってカートリッジに保持される。振分ローラを囲む保持リングから下方に延びるのは、リングから内側に凹んでリング及びステム間の肩部56を形成する円筒形の外周を有するジャーナルステム54である。保持リングの遠位の下部ジャーナルステム58は、上部ジャーナルステムよりも小さい直径を有する。下部ジャーナルステムの周縁は、上部ジャーナルステムの周縁の内側に凹んでいる。カートリッジギヤ60が、上部ステム及び下部ステム間に配置されている。カートリッジギヤは、好適には、先端が上部ジャーナルステムの周縁を超えない周縁歯を具えたスパーギヤである。
【0014】
カートリッジ48は、図4に示すように、搬送路パンの開口44に受容される。開口壁は、上部ジャーナルステムが接触して回転し得るベアリング面62を形成する。保持リングの直径が開口の直径を超えるため、リングの肩部56が、より小さな直径のステム及びギヤ部が下方にぶら下がる状態で、搬送路パンの上方に置かれる。
【0015】
複数のギヤプレート64が、搬送路パンの下方に移動可能に配置されている。各ギヤプレートが、個別に動作可能なグリッドセルの1つを規定する。ラックギヤ66の形式の動作ギヤが、ギヤプレートに配置されている。各ラックギヤが、カートリッジギヤの1つの歯に係合するよう配置されており、ギヤプレートが移動するのに対応して、そのカートリッジを回転させ得るラックとピニオンシステムを形成する。ギヤプレートは、1つの側がラックギヤを形成する歯70に接する細長い開口68を有する。それぞれの細長い開口68は、搬送路パンの開口44の1つの下方に配置されている。下部ジャーナルステムは、2つの他のプレート:搬送路パン42及び下部プレート72の間に挟持されるギヤプレートの細長い開口を通って延びている。下部プレートは、コンベヤのフレーム部分に動かないよう固定されており、搬送路パンの開口に垂直方向に揃うがそれよりも直径が小さい複数の開口74を有する。開口74は、カートリッジの下部ジャーナルステム58を回転可能に受容する大きさである。これにより、上部及び下部支持プレートが揃ってローラ駆動機構を組み立て易くするのを補助し、回転可能なカートリッジの固定軸に対する回転を制限する。
【0016】
下部プレート72の上部及び上部プレート42の下部にスペーサパッド76を対向させることで、2つのプレート及び可動ギヤプレート64間の適切な隙間を維持する。ボルト80によって締結されるスペーサ78、ワッシャ82、及びナット84が、搬送路パンと下部プレート72との間の隙間を維持する。
【0017】
各ギヤプレート64が、空気シリンダ、電動アクチュエータ、又は機械式アクチュエータといった個々のリニアアクチュエータ86によって移動する。図5に示すように、各グリッドセル列のアクチュエータの一端が、下部プレート72の下部に取り付けられる取り付けブラケット88に継ぎ手90によって取り付けられている。アクチュエータの他端からの延長ロッド92の延長部が、アクチュエータプレート96に継ぎ手94によって結合されている。内部にねじ山を切った3つのポスト98が、下部プレートの長穴100を通してアクチュエータプレートから上方に延びている。3つの平頭ねじ102が、ポストの中にギヤプレート64を通って延びており、ギヤプレートを関連するアクチュエータプレートに取り付ける。ロッドの延長部がギヤプレートの位置及び振分ローラの向きを判断しながら、延長ロッドがアクチュエータプレート及びギヤプレートを移動させる。
【0018】
振分コンベヤシステムのグリッドセルの1つの動作を図6乃至9に示す。各ギヤプレートが18個の振分ローラの配列を制御する。(3つの振分ローラが、図6及び8の左下において省略されており、ギヤプレートの態様をより良く示す。)。図6及び7において、振分ローラカートリッジ48が細長い長穴68の中央に位置する中間部に移動するギヤプレート64を示す。この位置に回転するカートリッジにより、グリッドセルの振分ローラの回転軸104が、ベルトの移動方向32に対して直角方向に直交する。コンベヤベルトがベルトの移動方向に前進すると、この方向の振分ローラがベルトの移動方向に回転し、直交するよう配置された係合するベルトローラが、回転することなしに振分ローラに乗る。このため、振分ローラが図6及び7の方向にあるときに、ベルトローラが停止する。ギヤプレートが、カートリッジが図8及び9の細長い長穴68の一端に位置する状態で、最大限にその範囲を超えて移動すると、振分ローラの回転軸104が、ベルトの移動方向から時計方向に鋭角γを形成する。この方向では、振分ローラが矢印106の方向に回転し、ベルトローラが矢印108の方向に回転して、図3の矢印34で示すように、図8の右側に向けて搬送される物品を押す。
【0019】
図3に示すように、流出単一化コンベヤ22は、好適には、動作する鋭角ローラ112を有するモジュール式のプラスチックコンベヤベルト110を有する。ベルトのそれぞれの半体のローラは、矢印114及び115に示すように、ベルトの中心に向く角度の方向に回転する。単一化ベルトの上方で搬送されるパッケージは、ベルトの移動方向32に前進すると、ベルトの中心に動かされる。好適には、単一化ベルトが分別ベルトよりも速く移動して、単一化コンベヤの中心線に沿った連続したパッケージ間の分離を加速する。このため、図2に示すように、単一化ベルトは下流側への分配のために1列にパッケージを揃える。単一化ベルトを、Intralox(登録商標)Series 400傾斜ローラモジュールで構成でき、ベルトが前進する際に搬送路の長さ方向に沿って鋭角ベルトローラを動作させる搬送路パンといったベアリング面に支持される。
【0020】
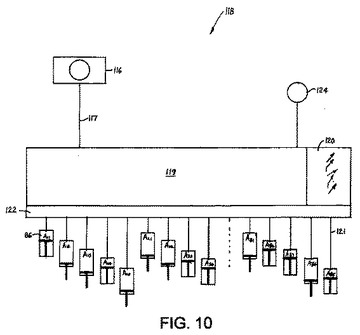
各パッケージの大きさ及び位置が、図1及び2に示すように、分別コンベヤへの入口の上方に支持されるデジタルカメラ116といったセンサによって検出される。レーザ又は音響システムといった各パッケージの大きさ及び位置を検出するための他の手段を代替的に使用できる。カメラによって撮影されたビデオ画像117が、図10に示すように、システムコントローラ119を有する制御システム118に供給される。システムコントローラは、ワークステーション、デスクトップコンピュータといったプログラム可能なコンピュータ、プログラム可能なロジックコントローラ、又は内蔵型のマイクロコントローラを有する。システムコントローラは、規則的な間隔で撮影されるビデオ画像を使用して、分別コンベヤの上に受容された各パッケージについての経路120の表を作成する。計算された経路は、各グリッドセルを通過するベルトローラを選択的に動作するよう使用されることで、パッケージが分別コンベヤ上の計算されたこれらの経路を辿る。個々のグリッドセルに関するアクチュエータ86が、出力モジュール122によってシングルライン121の上で制御される。アクチュエータに図10のA11−A85がラベル付けされ、8行5列のグリッド又は40のグリッドセルを示す。出力モジュール、アクチュエータ、及びラック−ピニオンシステムが、各グリッドセルを選択的に制御するための手段を形成する。また、分別ベルトのスピードが経路を計算することが必要とされる。このスピードをタコメータ124又は他のセンサによって検出することができ、システムコントローラに報告される。代替的に、分別コンベヤの駆動モータのスピード設定を、経路を計算する際のコントローラによって使用できる。
【0021】
分別コンベヤの動作を図12のフローチャートとともに図11A乃至11Eに示す。制御シーケンスのソフトウェアルーチンが、例えば0.5秒毎といったT秒毎に規則的に動作する。フローチャートのステップ124に示すように、シーケンスチャートが、流入するパッケージ流れのビデオ画像を取り込むことによって開始する。ステップ126で、コントローラが、新たなパッケージ、すなわち未だ経路が割り当てられていないパッケージが分別コンベヤに入って来ると判断すると、ステップ128で示すように、それは、パッケージの大きさ、又は経路、及びコンベヤ上のその位置を判断する。そして、コントローラが、ステップ130に示すように、センサから又は設定ポイント又は所定の値からベルトのスピードを判断する。経路、位置、及びスピードのデータから、コントローラが新たに入って来るそれぞれのパッケージに関する経路を計算し(ステップ132)、経路表にそれを保存する。各経路は、パッケージが分別コンベヤに入る間隔で始まる連続した動作間隔の間に関連するパッケージに関していずれのグリッドセルが動作するのかを規定する。
【0022】
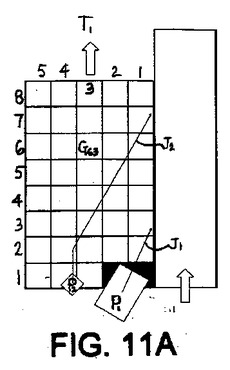
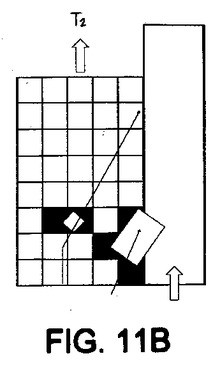
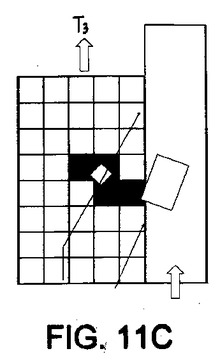
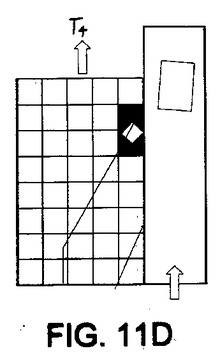
図11A乃至11Eは、2つのパッケージP1及びP2に関する動作の一例を与える。各図は、図11Aの間隔開始時間T1で始まる連続した間隔の各グリッドセルに関する動作状態を表す。他の開始時間は:T2=T1+T;T3=T2+T;T4=T3+T;T5=T4+T;であり、Tは制御シーケンスの繰り返し速さである。T1乃至T2(図11A)の第1の間隔の間に、グリッドセルG11及びG12のみが、影付きのセルで示すようにパッケージP1をその経路J1上で開始するよう動作する。これは、図12のフローチャートのステップ134によって示されており、Grid Control Taskを動作させるよう命令する。Grid Control Taskは、時間間隔の間にいずれのグリッドセルが動作するのかを判断するよう経路を使用して(ステップ136)、セルアクチュエータに対応する動作/停止信号を送信する(ステップ138)。パッケージP2についていずれのグリッドセルも初めに動作せず、それはパッケージP1と干渉せずにベルトの移動方向に移動し続ける。T2乃至T3(図11B)の次の間隔の間に、グリッドセルG11,G21,G22,及びG31が、経路J1に沿って単一化コンベヤに向けてパッケージP1を振り分け続けるよう動作する。その一方で、パッケージP2はP1から十分に大きく横方向に分けられ、グリッドセルG33及びG34、経路J2に沿ってP2の振り分けを開始するよう動作する。T3乃至T4(図11C)の次の間隔の間に、グリッドセルG41のみがP1に関して動作し、ほぼ全体的に分別コンベヤから離れるよう移送される。グリッドセルG42,G52,及びG53が、経路に沿ってP2を押し続けるよう動作する。T4乃至T5(図11D)の次の間隔の間に、グリッドセルG16及びG17が分別コンベヤへのP2の移送を完了するよう動作する。P1はすでに移送されているため、いずれのグリッドセルもそれに関して動作しない。最後に、T5乃至T6(図11E)で示す最後の間隔の間に、双方のパッケージがすでに移送されているため、いずれのグリッドセルも動作しない。
【0023】
実施例が示すように、各パッケージに関する経路を、1及び0の5×8のマトリクスの指標付き配列で表すことができ、各マトリクスの構成要素はグリッドセルの1つに対応し、「1」は動作を「0」は停止を表す。この配列の各マトリクスの指標は、対応する時間間隔の開始に対応する。総ての経路のマトリクスは各指標について論理的に配列され、各間隔の間に総てのグリッドセルの動作マップを判断する。このマップは、アクチュエータへの制御ライン121(図10)の動作/停止状態を規定する。
【0024】
図12のフローチャートによって示すように、各間隔が制御シーケンスの実行によって開始し、流入するフローの画像を初め取得し、Grid Control Taskを命令して経路に関する動作信号を出力する。新たに流入するパッケージが検出されない場合、制御シーケンスが、制御シーケンスのパイパスパス140を辿ることによって経路の計算を無視して、Grid Control Taskの起動を命令するように直接的に進む。
【0025】
このため、制御シーケンスソフトウェアが、各物品、パッケージに関する経路を計算するための手段を与え、パッケージ間で衝突せずに、分別コンベヤの側から離れるようなパッケージの迅速的且つ規則的な移送を実現する。
【0026】
本発明を1つのバージョンに関連して詳細に説明したが、他のバージョンが可能である。例えば、分別コンベヤのベルトローラを、ベルトの下方の分別ローラの配列以外の機構又はシステムによって選択的に動作させ得る。一例として、ローラを、グリッドに関する制御部材を形成する電磁石によって各グリッドセルで選択的に回転するように、磁気的に作動するよう作成できる。又は、各ベルトローラが、搬送路に沿って配置されグリッドセルを規定する制御部材として機能する個々に制御されるステータの配列によって選択的に回転するロータを有する。さらに、分別ローラが回転又は方向を変えるよう個別に制御されるモータ駆動するローラである場合、コンベヤベルトを無くし、物品を分別コンベヤにわたって分別される分別ローラの上に直接的に置くことができる。フローチャートは、計算されたパッケージ経路にしたがってグリッドセルの動作を制御するルーチンの一例を表す。他のソフトウェアの実施例も可能である。例えば、視覚化ステップ及びグリッド制御ステップを異なる速さで実行できる。マトリクス配列以外のものとして経路表を構成できる。このため、これらの少ない例が示唆するように、当業者は、本開示の範囲から逸脱することなしに、開示された特定の実施例に対する改良及び変更を作成できる。
【技術分野】
【0001】
本発明は、一般に、動力駆動コンベヤに関し、特に、ベルトが通過するグリッド状に配置された個々の制御セルで選択的に回転する物品支持ローラを有するコンベヤベルトを用いた分別システムに関する。
【背景技術】
【0002】
シューソーター、押し棒、及び分別レールを使用して、コンベヤ上のパッケージ及び他の物品を分別する。高密度のパッケージ流れでは、多くの場合、分別の前に、並ぶようパッケージを整列させ、1つのパッケージが他のものがコンベヤから出るのを遮らないようにすることが必要である。しかしながら、分別する前にパッケージを整列させるために使用するコンベヤは場所を取ってしまう。そして、塊の流れにおける様々な大きさ及び向きのパッケージの整列は、特に高い通過量の速さで難しい。
【0003】
このため、据え付け面積を多く取らずに、高い通過量速さで様々なパッケージの大きさを分別できる分別機の必要がある。
【発明の概要】
【0004】
このような必要性及び他の必要性は、分別コンベヤ及び制御システムを有する本発明の態様を実施する分別システムによって、対処される。分別コンベヤは、ベルトの移動方向に前進するコンベヤベルトを有する。ベルトは、ベルトの移動方向に対して横方向に回転できるベルトローラを支持する物品を有する。また、分別コンベヤは、個々に制御されるグリッドセルの複数の行及び列のグリッド状に配置された制御要素を有する。制御要素は、グリッドセルを通過する際に、ベルトローラを選択的に回転させる。制御システムは、ベルトに入る各物品の大きさ及び位置を検出するための手段を有する。コンベヤベルトに沿った経路が、経路を計算することによってベルトに入る際のその大きさ及び位置に基づいて、各物品について計算される。各グリッドセルは、経路にしたがって選択的に制御され、経路に沿って分別コンベヤの向こう側に向けて横方向に物品を分別する。
【0005】
本発明の別の態様では、物品の流れを分別するための方法が、(a)ベルトの移動方向に進むコンベヤベルトのベルトローラ上の物品の流れを受け取るステップと;(b)コンベヤベルトに入る際に物品の画像を取得してその大きさ及び位置を判断するステップと;(c)物品の大きさ及び位置から、各物品に関する経路を計算するステップと;(d)ベルトローラを選択的に動作させて、この経路にしたがってベルトの移動方向に対して横方向に回転させるステップと;を具える。このような方法において、物品が経路に沿ってコンベヤベルトの向こう側に向けて分別される。
【0006】
分別コンベヤの別のバージョンが、個々に制御されるグリッドセルの複数の行及び列のグリッド状に配置されたローラを有する分別コンベヤベルトを有する。制御システムは、分別コンベヤに入る各物品の大きさ及び位置を判断し、物品の大きさ及び位置から、分別コンベヤに沿って各物品についての経路を計算し、各物品について計算される経路にしたがって各グリッドセルのローラを選択的に制御し、この経路に沿って分別コンベヤの向こう側に物品を分別するようローラを作動させる。
【図面の簡単な説明】
【0007】
以下の説明、添付の特許請求の範囲、及び添付図面を参照することによって、これらの特徴及び態様が、その効果とともに、より良く理解される。
【0008】
【図1】図1は、本発明の態様を実施する分別システムの等角図である。
【図2】図2は、図1の分別システムの平面図である。
【図3】図3は、図1の分別システムの分別コンベヤの一部の平面図である。
【図4】図4は、図1に示す分別システムのための動作グリッドの上部の部分的に分解した等角図である。
【図5】図5は、図4の動作グリッドの下部の等角図である。
【図6】図6は、停止位置にある図4の動作グリッドのグリッドセルの拡大平面図である。
【図7】図7は、停止位置にある図6のグリッドセルの拡大底面図である。
【図8】図8は、グリッドセルが動作位置にある図6の拡大平面図である。
【図9】図9は、グリッドセルが動作位置にある図7に示すような拡大図である。
【図10】図10は、図1の分別システムで使用可能な制御システムのブロック図である。
【図11】図11A−11Eは、図1の分別システムの分別コンベヤベ上のパッケージの一例の構成に関する制御シーケンスを示す。
【図12】図12は、図1の分別システムの制御システムで使用可能な制御ロジックの一バージョンのフローチャートである。
【発明を実施するための形態】
【0009】
本発明の形態を実施する分別システムを図1及び図2に示す。箱又はパッケージPといった流入する様々な物品のマスフローが、分別コンベヤ20で分別され、隣接する流出単一化コンベヤ22に移送される。ランダムに向き且つ位置するパッケージのマスフローが、搬送方向26に前進する送込コンベヤ24によって分別コンベヤに供給される。送込コンベヤは、動力ローラコンベヤ、平ベルト、モジュール式コンベヤベルト、傾斜台等として理解される。分別コンベヤは、搬送方向であるベルトの移動方向32に対して直交する又は横方向の軸31を回転するよう構成されたパッケージ支持ローラ30(図3)を有するコンベヤベルト28を具える。パッケージ支持ベルトローラは矢印34の方向に能動的に回転して、単一化コンベヤ22に向かってパッケージを振り分ける。
【0010】
分別コンベヤベルト28の横ローラが、分別コンベヤの搬送路に沿って行R及び列Cに構成された、個々に動作するゾーンのグリッド36又はグリッドセル38で選択的に回転する。一実施例では、分別コンベヤベルト28のローラ30が、ベルトがベルトの移動方向に前進する際に、ベルトの下にあるベアリング面に接触するよう回転することによって回転し得るように、ベルトの厚さ方向に延びている。このようなベルトの一例は、米国ルイジアナ州ハラハンのIntralox,L.L.C.によって製造且つ販売されるIntralox(登録商標)Series 7000ベルトである。
【0011】
ベルトの下にあるベアリング面の一部の分解図を図4に示す。ベルトローラは、制御要素−本実施例では、搬送路に沿って配置される振分ローラ40−の配列の上で支持されている。振分ローラの周囲面はベアリング面として機能する。
【0012】
振分ローラが、自身がコンベヤのフレーム(図示せず)に取り付けられる搬送路パン42に取り付けられている。このパンは、長手方向の列46及び水平方向又は横方向の行47で構成される、複数の円形の開口44によって穴が開けられている。開口の列は、ベルトローラの横方向位置に対して横方向に揃っている。各開口は、ベルトがベルトの移動方向に前進する際に、対応する列のベルトローラに係合する自由に回転可能な振分ローラ40を支持するカートリッジ48を回転可能に受容する。ベルトローラと振分ローラとの間の転がり接触により、それらの軸が互いに傾いている限り、それら双方が互いに転がり且つ回転する。
【0013】
振分ローラカートリッジ48は、振分ローラ40の穴に受容される軸の端部を支持する直径方向に対向する穴52を具えた保持リング50を有する。穴の1つは、カートリッジ及び振分ローラの中に軸を挿入できるスルーホールとし、他の穴は、軸に対する末端を形成する盲端を有し得る。このような方法では、振分ローラが、ローラの突出部が保持リングの上部を超えて突出する状態で、固定軸に沿ってカートリッジに保持される。振分ローラを囲む保持リングから下方に延びるのは、リングから内側に凹んでリング及びステム間の肩部56を形成する円筒形の外周を有するジャーナルステム54である。保持リングの遠位の下部ジャーナルステム58は、上部ジャーナルステムよりも小さい直径を有する。下部ジャーナルステムの周縁は、上部ジャーナルステムの周縁の内側に凹んでいる。カートリッジギヤ60が、上部ステム及び下部ステム間に配置されている。カートリッジギヤは、好適には、先端が上部ジャーナルステムの周縁を超えない周縁歯を具えたスパーギヤである。
【0014】
カートリッジ48は、図4に示すように、搬送路パンの開口44に受容される。開口壁は、上部ジャーナルステムが接触して回転し得るベアリング面62を形成する。保持リングの直径が開口の直径を超えるため、リングの肩部56が、より小さな直径のステム及びギヤ部が下方にぶら下がる状態で、搬送路パンの上方に置かれる。
【0015】
複数のギヤプレート64が、搬送路パンの下方に移動可能に配置されている。各ギヤプレートが、個別に動作可能なグリッドセルの1つを規定する。ラックギヤ66の形式の動作ギヤが、ギヤプレートに配置されている。各ラックギヤが、カートリッジギヤの1つの歯に係合するよう配置されており、ギヤプレートが移動するのに対応して、そのカートリッジを回転させ得るラックとピニオンシステムを形成する。ギヤプレートは、1つの側がラックギヤを形成する歯70に接する細長い開口68を有する。それぞれの細長い開口68は、搬送路パンの開口44の1つの下方に配置されている。下部ジャーナルステムは、2つの他のプレート:搬送路パン42及び下部プレート72の間に挟持されるギヤプレートの細長い開口を通って延びている。下部プレートは、コンベヤのフレーム部分に動かないよう固定されており、搬送路パンの開口に垂直方向に揃うがそれよりも直径が小さい複数の開口74を有する。開口74は、カートリッジの下部ジャーナルステム58を回転可能に受容する大きさである。これにより、上部及び下部支持プレートが揃ってローラ駆動機構を組み立て易くするのを補助し、回転可能なカートリッジの固定軸に対する回転を制限する。
【0016】
下部プレート72の上部及び上部プレート42の下部にスペーサパッド76を対向させることで、2つのプレート及び可動ギヤプレート64間の適切な隙間を維持する。ボルト80によって締結されるスペーサ78、ワッシャ82、及びナット84が、搬送路パンと下部プレート72との間の隙間を維持する。
【0017】
各ギヤプレート64が、空気シリンダ、電動アクチュエータ、又は機械式アクチュエータといった個々のリニアアクチュエータ86によって移動する。図5に示すように、各グリッドセル列のアクチュエータの一端が、下部プレート72の下部に取り付けられる取り付けブラケット88に継ぎ手90によって取り付けられている。アクチュエータの他端からの延長ロッド92の延長部が、アクチュエータプレート96に継ぎ手94によって結合されている。内部にねじ山を切った3つのポスト98が、下部プレートの長穴100を通してアクチュエータプレートから上方に延びている。3つの平頭ねじ102が、ポストの中にギヤプレート64を通って延びており、ギヤプレートを関連するアクチュエータプレートに取り付ける。ロッドの延長部がギヤプレートの位置及び振分ローラの向きを判断しながら、延長ロッドがアクチュエータプレート及びギヤプレートを移動させる。
【0018】
振分コンベヤシステムのグリッドセルの1つの動作を図6乃至9に示す。各ギヤプレートが18個の振分ローラの配列を制御する。(3つの振分ローラが、図6及び8の左下において省略されており、ギヤプレートの態様をより良く示す。)。図6及び7において、振分ローラカートリッジ48が細長い長穴68の中央に位置する中間部に移動するギヤプレート64を示す。この位置に回転するカートリッジにより、グリッドセルの振分ローラの回転軸104が、ベルトの移動方向32に対して直角方向に直交する。コンベヤベルトがベルトの移動方向に前進すると、この方向の振分ローラがベルトの移動方向に回転し、直交するよう配置された係合するベルトローラが、回転することなしに振分ローラに乗る。このため、振分ローラが図6及び7の方向にあるときに、ベルトローラが停止する。ギヤプレートが、カートリッジが図8及び9の細長い長穴68の一端に位置する状態で、最大限にその範囲を超えて移動すると、振分ローラの回転軸104が、ベルトの移動方向から時計方向に鋭角γを形成する。この方向では、振分ローラが矢印106の方向に回転し、ベルトローラが矢印108の方向に回転して、図3の矢印34で示すように、図8の右側に向けて搬送される物品を押す。
【0019】
図3に示すように、流出単一化コンベヤ22は、好適には、動作する鋭角ローラ112を有するモジュール式のプラスチックコンベヤベルト110を有する。ベルトのそれぞれの半体のローラは、矢印114及び115に示すように、ベルトの中心に向く角度の方向に回転する。単一化ベルトの上方で搬送されるパッケージは、ベルトの移動方向32に前進すると、ベルトの中心に動かされる。好適には、単一化ベルトが分別ベルトよりも速く移動して、単一化コンベヤの中心線に沿った連続したパッケージ間の分離を加速する。このため、図2に示すように、単一化ベルトは下流側への分配のために1列にパッケージを揃える。単一化ベルトを、Intralox(登録商標)Series 400傾斜ローラモジュールで構成でき、ベルトが前進する際に搬送路の長さ方向に沿って鋭角ベルトローラを動作させる搬送路パンといったベアリング面に支持される。
【0020】
各パッケージの大きさ及び位置が、図1及び2に示すように、分別コンベヤへの入口の上方に支持されるデジタルカメラ116といったセンサによって検出される。レーザ又は音響システムといった各パッケージの大きさ及び位置を検出するための他の手段を代替的に使用できる。カメラによって撮影されたビデオ画像117が、図10に示すように、システムコントローラ119を有する制御システム118に供給される。システムコントローラは、ワークステーション、デスクトップコンピュータといったプログラム可能なコンピュータ、プログラム可能なロジックコントローラ、又は内蔵型のマイクロコントローラを有する。システムコントローラは、規則的な間隔で撮影されるビデオ画像を使用して、分別コンベヤの上に受容された各パッケージについての経路120の表を作成する。計算された経路は、各グリッドセルを通過するベルトローラを選択的に動作するよう使用されることで、パッケージが分別コンベヤ上の計算されたこれらの経路を辿る。個々のグリッドセルに関するアクチュエータ86が、出力モジュール122によってシングルライン121の上で制御される。アクチュエータに図10のA11−A85がラベル付けされ、8行5列のグリッド又は40のグリッドセルを示す。出力モジュール、アクチュエータ、及びラック−ピニオンシステムが、各グリッドセルを選択的に制御するための手段を形成する。また、分別ベルトのスピードが経路を計算することが必要とされる。このスピードをタコメータ124又は他のセンサによって検出することができ、システムコントローラに報告される。代替的に、分別コンベヤの駆動モータのスピード設定を、経路を計算する際のコントローラによって使用できる。
【0021】
分別コンベヤの動作を図12のフローチャートとともに図11A乃至11Eに示す。制御シーケンスのソフトウェアルーチンが、例えば0.5秒毎といったT秒毎に規則的に動作する。フローチャートのステップ124に示すように、シーケンスチャートが、流入するパッケージ流れのビデオ画像を取り込むことによって開始する。ステップ126で、コントローラが、新たなパッケージ、すなわち未だ経路が割り当てられていないパッケージが分別コンベヤに入って来ると判断すると、ステップ128で示すように、それは、パッケージの大きさ、又は経路、及びコンベヤ上のその位置を判断する。そして、コントローラが、ステップ130に示すように、センサから又は設定ポイント又は所定の値からベルトのスピードを判断する。経路、位置、及びスピードのデータから、コントローラが新たに入って来るそれぞれのパッケージに関する経路を計算し(ステップ132)、経路表にそれを保存する。各経路は、パッケージが分別コンベヤに入る間隔で始まる連続した動作間隔の間に関連するパッケージに関していずれのグリッドセルが動作するのかを規定する。
【0022】
図11A乃至11Eは、2つのパッケージP1及びP2に関する動作の一例を与える。各図は、図11Aの間隔開始時間T1で始まる連続した間隔の各グリッドセルに関する動作状態を表す。他の開始時間は:T2=T1+T;T3=T2+T;T4=T3+T;T5=T4+T;であり、Tは制御シーケンスの繰り返し速さである。T1乃至T2(図11A)の第1の間隔の間に、グリッドセルG11及びG12のみが、影付きのセルで示すようにパッケージP1をその経路J1上で開始するよう動作する。これは、図12のフローチャートのステップ134によって示されており、Grid Control Taskを動作させるよう命令する。Grid Control Taskは、時間間隔の間にいずれのグリッドセルが動作するのかを判断するよう経路を使用して(ステップ136)、セルアクチュエータに対応する動作/停止信号を送信する(ステップ138)。パッケージP2についていずれのグリッドセルも初めに動作せず、それはパッケージP1と干渉せずにベルトの移動方向に移動し続ける。T2乃至T3(図11B)の次の間隔の間に、グリッドセルG11,G21,G22,及びG31が、経路J1に沿って単一化コンベヤに向けてパッケージP1を振り分け続けるよう動作する。その一方で、パッケージP2はP1から十分に大きく横方向に分けられ、グリッドセルG33及びG34、経路J2に沿ってP2の振り分けを開始するよう動作する。T3乃至T4(図11C)の次の間隔の間に、グリッドセルG41のみがP1に関して動作し、ほぼ全体的に分別コンベヤから離れるよう移送される。グリッドセルG42,G52,及びG53が、経路に沿ってP2を押し続けるよう動作する。T4乃至T5(図11D)の次の間隔の間に、グリッドセルG16及びG17が分別コンベヤへのP2の移送を完了するよう動作する。P1はすでに移送されているため、いずれのグリッドセルもそれに関して動作しない。最後に、T5乃至T6(図11E)で示す最後の間隔の間に、双方のパッケージがすでに移送されているため、いずれのグリッドセルも動作しない。
【0023】
実施例が示すように、各パッケージに関する経路を、1及び0の5×8のマトリクスの指標付き配列で表すことができ、各マトリクスの構成要素はグリッドセルの1つに対応し、「1」は動作を「0」は停止を表す。この配列の各マトリクスの指標は、対応する時間間隔の開始に対応する。総ての経路のマトリクスは各指標について論理的に配列され、各間隔の間に総てのグリッドセルの動作マップを判断する。このマップは、アクチュエータへの制御ライン121(図10)の動作/停止状態を規定する。
【0024】
図12のフローチャートによって示すように、各間隔が制御シーケンスの実行によって開始し、流入するフローの画像を初め取得し、Grid Control Taskを命令して経路に関する動作信号を出力する。新たに流入するパッケージが検出されない場合、制御シーケンスが、制御シーケンスのパイパスパス140を辿ることによって経路の計算を無視して、Grid Control Taskの起動を命令するように直接的に進む。
【0025】
このため、制御シーケンスソフトウェアが、各物品、パッケージに関する経路を計算するための手段を与え、パッケージ間で衝突せずに、分別コンベヤの側から離れるようなパッケージの迅速的且つ規則的な移送を実現する。
【0026】
本発明を1つのバージョンに関連して詳細に説明したが、他のバージョンが可能である。例えば、分別コンベヤのベルトローラを、ベルトの下方の分別ローラの配列以外の機構又はシステムによって選択的に動作させ得る。一例として、ローラを、グリッドに関する制御部材を形成する電磁石によって各グリッドセルで選択的に回転するように、磁気的に作動するよう作成できる。又は、各ベルトローラが、搬送路に沿って配置されグリッドセルを規定する制御部材として機能する個々に制御されるステータの配列によって選択的に回転するロータを有する。さらに、分別ローラが回転又は方向を変えるよう個別に制御されるモータ駆動するローラである場合、コンベヤベルトを無くし、物品を分別コンベヤにわたって分別される分別ローラの上に直接的に置くことができる。フローチャートは、計算されたパッケージ経路にしたがってグリッドセルの動作を制御するルーチンの一例を表す。他のソフトウェアの実施例も可能である。例えば、視覚化ステップ及びグリッド制御ステップを異なる速さで実行できる。マトリクス配列以外のものとして経路表を構成できる。このため、これらの少ない例が示唆するように、当業者は、本開示の範囲から逸脱することなしに、開示された特定の実施例に対する改良及び変更を作成できる。
【特許請求の範囲】
【請求項1】
分別システムであって、
ベルトの移動方向に前進し、ベルトの移動方向に対して横方向に回転可能な複数の物品支持ベルトローラを有するコンベヤベルトと、
分別コンベヤに沿って個別に制御されるグリッドセルの多数の行及び列のグリッドに配置され、前記グリッドセルを通過する前記ベルトローラを選択的に回転させる複数の制御要素と、
を有する分別コンベヤと、
前記コンベヤベルトに流入する各物品の大きさ及び位置を検出するための手段と、
前記検出するための手段によって検出された大きさ及び位置から、前記分別コンベヤに沿った各物品についての経路を計算するための手段と、
前記物品に関して計算された前記経路にしたがって、各グリッドセルの前記制御要素を選択的に制御し、前記経路に沿って前記分別コンベヤを横切って横方向に物品を振り分けるための手段と、
を有する制御システムと、
を具えることを特徴とする分別システム。
【請求項2】
前記検出するための手段が、前記物品の画像を提供する少なくとも1のカメラを具えることを特徴とする請求項1に記載の分別システム。
【請求項3】
前記経路を計算するための手段が、並列に前記コンベヤベルトに入る物品のための非干渉経路を計算することを特徴とする請求項1に記載の分別システム。
【請求項4】
前記経路を計算するための手段が、前記ベルトの移動方向のベルトの速度の関数として経路を計算することを特徴とする請求項1に記載の分別システム。
【請求項5】
前記制御要素が、振分ローラを具えることを特徴とする請求項1に記載の分別システム。
【請求項6】
各グリッドセルを選択的に制御するための手段が、前記ベルトローラに対して前記グリッドセルの総ての前記振分ローラの角度を変更する各グリッドセルに付随するアクチュエータを具えることを特徴とする請求項5に記載の分別システム。
【請求項7】
前記ベルトローラが、前記ベルトの移動方向に平行な軸を中心に回転し、
前記アクチュエータが、前記ベルトローラが接触によって回転する斜角から、前記ベルトローラが回転不可能になる直角まで、前記グリッドセルの総ての振分ローラの角度を変化させることを特徴とする請求項6に記載の分別システム。
【請求項8】
さらに、前記分別コンベヤよりも大きなスピードで前記ベルトの移動方向に前進し、前記分別コンベヤの長さの一部に沿って並んで前記分別コンベヤに隣接して、前記分別コンベヤから振り分けられた物品を受け取り、1列に前記ベルトの移動方向に流出コンベヤに沿って前記物品を加速させる流出コンベヤを具えることを特徴とする請求項1に記載の分別システム。
【請求項9】
物品の流れを分別するための方法であって、
ベルトの移動方向に前進するコンベヤベルトのベルトローラの上方に流れる物品を受け取るステップと;
前記コンベヤベルトに入る際の前記物品の画像を取得して、それらの大きさ及び位置を判断するステップと;
前記物品の大きさ及び位置からの各物品の経路を計算するステップと;
前記ベルトローラを選択的に動作させ、前記経路にしたがって前記ベルトの移動方向に対して横方向に回転させて、前記経路に沿って前記コンベヤベルトを横切るよう前記物品を振り分けるステップと;
を具えることを特徴とする方法。
【請求項10】
さらに、前記コンベヤベルトに沿って個別に制御されるグリッドセルの固定グリッドを設定し、前記グリッドセルを通過する前記ベルトローラを選択的に動作させるステップを具えることを特徴とする請求項9に記載の方法。
【請求項11】
分別システムであって、
分別コンベヤに沿って個別に制御されるグリッドセルの多数の行及び列のグリッドに配置され、複数の選択的に回転可能なローラを有する分別コンベヤと、
前記分別コンベヤに流入する各物品の大きさ及び位置を判断し、前記物品の大きさ及び位置から前記分別コンベヤに沿った各物品についての経路を計算し、前記物品について計算された前記経路にしたがって各グリッドセルの前記ローラを選択的に制御し、前記経路に沿って前記分別コンベヤを横切るように前記物品を振り分けるよう前記ローラを動作させる制御システムと、
を具えることを特徴とする分別システム。
【請求項12】
さらに、前記分別コンベヤが、前記ベルトの移動方向に前進して、前記コンベヤベルトの厚さ方向を通して延び、前記ベルトの移動方向に対して横方向に回転可能な複数の物品支持ベルトローラを有する、コンベヤベルトを有しており、
前記選択的に回転可能なローラが、前記グリッドセルを通過する前記ベルトローラに接触し且つこれを選択的に回転させるベアリング面を有することを特徴とする請求項11に記載の分別システム。
【請求項13】
前記制御システムが、前記ベルトローラに対して前記グリッドセルの総ての前記選択的に回転可能なローラの角度を選択的に変化させる各グリッドセルに付随するアクチュエータを有することを特徴とする請求項12に記載の分別システム。
【請求項14】
前記ベルトローラが、前記ベルトの移動方向に平行な軸を中心に回転し、
前記アクチュエータが、前記ベルトローラが接触によって回転する斜角から、前記ベルトローラが回転不可能になる直角まで、前記グリッドセルの総ての振分ローラの角度を変化させることを特徴とする請求項13に記載の分別システム。
【請求項15】
さらに、前記分別コンベヤよりも大きなスピードで前記ベルトの移動方向に前進し、前記分別コンベヤの長さの一部に沿って並んで前記分別コンベヤに隣接して、前記分別コンベヤから振り分けられた物品を受け取り、1列に前記ベルトの移動方向に流出コンベヤに沿って前記物品を加速させる流出コンベヤを具えることを特徴とする請求項12に記載の分別システム。
【請求項1】
分別システムであって、
ベルトの移動方向に前進し、ベルトの移動方向に対して横方向に回転可能な複数の物品支持ベルトローラを有するコンベヤベルトと、
分別コンベヤに沿って個別に制御されるグリッドセルの多数の行及び列のグリッドに配置され、前記グリッドセルを通過する前記ベルトローラを選択的に回転させる複数の制御要素と、
を有する分別コンベヤと、
前記コンベヤベルトに流入する各物品の大きさ及び位置を検出するための手段と、
前記検出するための手段によって検出された大きさ及び位置から、前記分別コンベヤに沿った各物品についての経路を計算するための手段と、
前記物品に関して計算された前記経路にしたがって、各グリッドセルの前記制御要素を選択的に制御し、前記経路に沿って前記分別コンベヤを横切って横方向に物品を振り分けるための手段と、
を有する制御システムと、
を具えることを特徴とする分別システム。
【請求項2】
前記検出するための手段が、前記物品の画像を提供する少なくとも1のカメラを具えることを特徴とする請求項1に記載の分別システム。
【請求項3】
前記経路を計算するための手段が、並列に前記コンベヤベルトに入る物品のための非干渉経路を計算することを特徴とする請求項1に記載の分別システム。
【請求項4】
前記経路を計算するための手段が、前記ベルトの移動方向のベルトの速度の関数として経路を計算することを特徴とする請求項1に記載の分別システム。
【請求項5】
前記制御要素が、振分ローラを具えることを特徴とする請求項1に記載の分別システム。
【請求項6】
各グリッドセルを選択的に制御するための手段が、前記ベルトローラに対して前記グリッドセルの総ての前記振分ローラの角度を変更する各グリッドセルに付随するアクチュエータを具えることを特徴とする請求項5に記載の分別システム。
【請求項7】
前記ベルトローラが、前記ベルトの移動方向に平行な軸を中心に回転し、
前記アクチュエータが、前記ベルトローラが接触によって回転する斜角から、前記ベルトローラが回転不可能になる直角まで、前記グリッドセルの総ての振分ローラの角度を変化させることを特徴とする請求項6に記載の分別システム。
【請求項8】
さらに、前記分別コンベヤよりも大きなスピードで前記ベルトの移動方向に前進し、前記分別コンベヤの長さの一部に沿って並んで前記分別コンベヤに隣接して、前記分別コンベヤから振り分けられた物品を受け取り、1列に前記ベルトの移動方向に流出コンベヤに沿って前記物品を加速させる流出コンベヤを具えることを特徴とする請求項1に記載の分別システム。
【請求項9】
物品の流れを分別するための方法であって、
ベルトの移動方向に前進するコンベヤベルトのベルトローラの上方に流れる物品を受け取るステップと;
前記コンベヤベルトに入る際の前記物品の画像を取得して、それらの大きさ及び位置を判断するステップと;
前記物品の大きさ及び位置からの各物品の経路を計算するステップと;
前記ベルトローラを選択的に動作させ、前記経路にしたがって前記ベルトの移動方向に対して横方向に回転させて、前記経路に沿って前記コンベヤベルトを横切るよう前記物品を振り分けるステップと;
を具えることを特徴とする方法。
【請求項10】
さらに、前記コンベヤベルトに沿って個別に制御されるグリッドセルの固定グリッドを設定し、前記グリッドセルを通過する前記ベルトローラを選択的に動作させるステップを具えることを特徴とする請求項9に記載の方法。
【請求項11】
分別システムであって、
分別コンベヤに沿って個別に制御されるグリッドセルの多数の行及び列のグリッドに配置され、複数の選択的に回転可能なローラを有する分別コンベヤと、
前記分別コンベヤに流入する各物品の大きさ及び位置を判断し、前記物品の大きさ及び位置から前記分別コンベヤに沿った各物品についての経路を計算し、前記物品について計算された前記経路にしたがって各グリッドセルの前記ローラを選択的に制御し、前記経路に沿って前記分別コンベヤを横切るように前記物品を振り分けるよう前記ローラを動作させる制御システムと、
を具えることを特徴とする分別システム。
【請求項12】
さらに、前記分別コンベヤが、前記ベルトの移動方向に前進して、前記コンベヤベルトの厚さ方向を通して延び、前記ベルトの移動方向に対して横方向に回転可能な複数の物品支持ベルトローラを有する、コンベヤベルトを有しており、
前記選択的に回転可能なローラが、前記グリッドセルを通過する前記ベルトローラに接触し且つこれを選択的に回転させるベアリング面を有することを特徴とする請求項11に記載の分別システム。
【請求項13】
前記制御システムが、前記ベルトローラに対して前記グリッドセルの総ての前記選択的に回転可能なローラの角度を選択的に変化させる各グリッドセルに付随するアクチュエータを有することを特徴とする請求項12に記載の分別システム。
【請求項14】
前記ベルトローラが、前記ベルトの移動方向に平行な軸を中心に回転し、
前記アクチュエータが、前記ベルトローラが接触によって回転する斜角から、前記ベルトローラが回転不可能になる直角まで、前記グリッドセルの総ての振分ローラの角度を変化させることを特徴とする請求項13に記載の分別システム。
【請求項15】
さらに、前記分別コンベヤよりも大きなスピードで前記ベルトの移動方向に前進し、前記分別コンベヤの長さの一部に沿って並んで前記分別コンベヤに隣接して、前記分別コンベヤから振り分けられた物品を受け取り、1列に前記ベルトの移動方向に流出コンベヤに沿って前記物品を加速させる流出コンベヤを具えることを特徴とする請求項12に記載の分別システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】

【図8】
【図9】
【図10】
【図11A】
【図11B】
【図11C】
【図11D】
【図11E】

【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11A】
【図11B】
【図11C】
【図11D】
【図11E】
【図12】
【公表番号】特表2013−500220(P2013−500220A)
【公表日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願番号】特願2012−521663(P2012−521663)
【出願日】平成22年7月7日(2010.7.7)
【国際出願番号】PCT/US2010/041124
【国際公開番号】WO2011/011195
【国際公開日】平成23年1月27日(2011.1.27)
【出願人】(508181663)レイトラム,エル.エル.シー. (43)
【Fターム(参考)】
【公表日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願日】平成22年7月7日(2010.7.7)
【国際出願番号】PCT/US2010/041124
【国際公開番号】WO2011/011195
【国際公開日】平成23年1月27日(2011.1.27)
【出願人】(508181663)レイトラム,エル.エル.シー. (43)
【Fターム(参考)】
[ Back to top ]