
制御システムおよびそれを備えた自動二輪車
【課題】走行安定性を向上させるとともに旋回性の低下を防止できる自動二輪車の制御システムおよびそれを備える自動二輪車を提供することである。
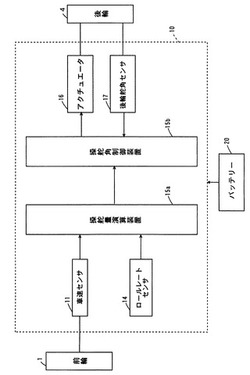
【解決手段】制御システム10は、車速センサ11、ロールレートセンサ14、操舵量演算装置15a、操舵角制御装置15b、アクチュエータ16および後輪舵角センサ17を含む。操舵量演算装置15aは、自動二輪車のロールレートおよび車速を取得し、取得したロールレートおよび車速に応じて後輪4の目標操舵角および遅れ操舵角を決定する。操舵角制御装置15bは、操舵量演算装置15aによって決定された遅れ操舵角に基づいて、アクチュエータ16によって後輪4を操舵する。
【解決手段】制御システム10は、車速センサ11、ロールレートセンサ14、操舵量演算装置15a、操舵角制御装置15b、アクチュエータ16および後輪舵角センサ17を含む。操舵量演算装置15aは、自動二輪車のロールレートおよび車速を取得し、取得したロールレートおよび車速に応じて後輪4の目標操舵角および遅れ操舵角を決定する。操舵角制御装置15bは、操舵量演算装置15aによって決定された遅れ操舵角に基づいて、アクチュエータ16によって後輪4を操舵する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自動二輪車の制御システムおよびそれを備えた自動二輪車に関する。
【背景技術】
【0002】
従来より、自動二輪車の前輪の操舵に応じて後輪を操舵する前後輪操舵装置の開発が進められている。
【0003】
従来の前後輪操舵装置としては、前輪の舵角に応じて後輪を機械的または電気的に操舵する機構を有するもの(例えば、特許文献1、2および3)、および後輪に加わる横力に応じて自動的に後輪を操舵する機構を有するもの(例えば、特許文献4および5)等がある。
【0004】
しかしながら、上記特許文献1〜5の機構を用いた場合、自動二輪車が直進している際の安定性は向上するが、旋回時の安定性が低下する。
【0005】
そこで、例えば、特許文献6に記載されている前後輪操向装置においては、高速走行時と中低速走行時とで後輪の操舵量を変えている。それにより、高速走行時と中低速走行時とで、それぞれ所望の直進性と操向性とを得ようとしている。また、特許文献7に記載されている前後輪操舵装置においては、速度、ヨーレイトおよびロールレート等を検出し、検出結果に基づいて後輪を前輪の操舵方向と同相に操舵している。それにより、後輪操舵時の自動二輪車の振動を減衰している。
【特許文献1】特開昭61−160374号公報
【特許文献2】特許第2927477号公報
【特許文献3】特許第3206610号公報
【特許文献4】特許第2829009号公報
【特許文献5】特公平7−98507号公報
【特許文献6】特許第2938911号公報
【特許文献7】特許第3200771号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
ところで、上記特許文献6または7に記載されている装置においては、後輪の操舵角は前輪の操舵角に基づいて決定される。このような操舵方法においては、自動二輪車が不安定な状態で旋回しようとすると、大きな操舵トルクおよびロール角が必要となる。そのため、自動二輪車の操作性が低下し、安定した旋回を行うことができない場合がある。
【0007】
本発明の目的は、走行安定性を向上させるとともに旋回性の低下を防止できる自動二輪車の制御システムおよびそれを備える自動二輪車を提供することである。
【課題を解決するための手段】
【0008】
(1)第1の発明に係る制御システムは、自動二輪車の姿勢を制御する制御システムであって、前輪を回転可能かつ操舵可能に保持する保持部材と、保持部材に設けられ、後輪を回転可能かつ揺動可能に支持する後輪支持機構と、自動二輪車のロールレートを検出するロールレート検出手段と、後輪を揺動させる揺動手段と、ロールレート検出手段によって検出されたロールレートに基づいて揺動手段により後輪を揺動させる制御手段とを備えたものである。
【0009】
本発明に係る制御システムにおいては、後輪支持機構によって後輪が回転可能かつ揺動可能に保持される。ロールレート検出手段によって検出された自動二輪車のロールレートに基づいて、制御手段が揺動手段により後輪を揺動させる。
【0010】
このように、自動二輪車のロールレートに基づいて後輪を揺動させることにより、前輪の横力と後輪の横力との比率を調整し、自動二輪車のロールレートを低減することができる。それにより、自動二輪車の走行安定性が向上するとともに、旋回性の低下を防止することができる。
【0011】
(2)後輪支持機構は、後輪を保持部材の上下方向に平行な軸に対して傾斜可能に支持し、制御手段は、ロールレート検出手段によって検出されたロールレートに基づいて後輪を保持部材の上下方向に平行な軸に対して傾斜させてもよい。
【0012】
この場合、制御手段は、ロールレート検出手段によって検出された自動二輪車のロールレートに基づいて、後輪を保持部材の上下方向に平行な軸に対して傾斜させる。それにより、前輪の横力と後輪の横力との比率を調整し、自動二輪車のロールレートを低減することができる。その結果、自動二輪車の走行安定性が向上するとともに、旋回性の低下を防止することができる。
【0013】
(3)後輪支持機構は、後輪を保持部材の前後方向に平行な軸に対して傾斜可能に支持し、制御手段は、ロールレート検出手段によって検出されたロールレートに基づいて後輪を保持部材の前後方向に平行な軸に対して傾斜させてもよい。
【0014】
この場合、制御手段は、ロールレート検出手段によって検出された自動二輪車のロールレートに基づいて、後輪を保持部材の前後方向に平行な軸に対して傾斜させる。それにより、前輪の横力と後輪の横力との比率を調整し、自動二輪車のロールレートを低減することができる。その結果、自動二輪車の走行安定性が向上するとともに、旋回性の低下を防止することができる。
【0015】
(4)制御システムは、自動二輪車の車速を検出する速度検出手段をさらに備え、制御装置は、ロールレート検出手段によって検出されたロールレートと係数との積に基づいて後輪の傾斜角度を決定し、係数は、速度検出手段によって検出された車速に基づいて決定されてもよい。
【0016】
この場合、自動二輪車のロールレートおよび車速に応じて後輪の傾斜角度を決定することができる。それにより、自動二輪車のロールレートを確実に低減することができる。その結果、自動二輪車の走行安定性が確実に向上するとともに、旋回性の低下を確実に防止することができる。
【0017】
(5)制御装置は、速度検出手段によって検出された車速に基づいて決定される応答速度で後輪を傾斜させてもよい。
【0018】
この場合、車速に応じた応答速度で後輪が傾斜されるので、二輪車特有の不安定現象を確実に防止することができる。それにより、自動二輪車の走行安定性が確実に向上するとともに、旋回性の低下を確実に防止することができる。
【0019】
(6)制御装置は、1次遅れ要素で後輪を傾斜させ、1次遅れ要素の時定数は、速度検出手段によって検出された車速に基づいて決定されてもよい。
【0020】
この場合、自動二輪車の車速に応じた時定数の1次遅れ要素で後輪が傾斜されるので、二輪車特有の不安定現象をより確実に防止することができる。それにより、自動二輪車の走行安定性がより確実に向上するとともに、旋回性の低下をより確実に防止することができる。
【0021】
(7)第2の発明に係る制御システムは、自動二輪車の姿勢を制御する制御システムであって、前輪を回転可能かつ操舵可能に保持する第1の保持部材と、第1の保持部材に揺動可能に取り付けられるとともに後輪を保持する第2の保持部材と、自動二輪車のロールレートを検出するロールレート検出手段と、第1の保持部材および第2の保持部材の一方を他方に対して揺動させる揺動手段と、ロールレート検出手段によって検出されたロールレートに基づいて揺動手段により第1の保持部材および第2の保持部材の一方を他方に対して揺動させる制御手段とを備えたものである。
【0022】
本発明に係る制御システムにおいては、前輪を保持する第1の保持部材と後輪を保持する第2の保持部材とが互いに揺動可能に取り付けられている。ロールレート検出手段によって検出された自動二輪車のロールレートに基づいて、制御手段が揺動手段により第1の保持部材および第2の保持部材の一方を他方に対して揺動させる。
【0023】
このように、自動二輪車のロールレートに基づいて第1の保持部材および第2の保持部材の一方を他方に対して揺動させることにより、前輪の横力と後輪の横力との比率を調整し、自動二輪車のロールレートを低減することができる。それにより、自動二輪車の走行安定性が向上するとともに、旋回性の低下を防止することができる。
【0024】
(8)第1の保持部材と第2の保持部材とは前後方向に延びる軸周りに回動可能に取り付けられており、前後方向に延びる軸の延長線は後輪と地面との略接点を通過し、制御手段は、ロールレート検出手段によって検出されたロールレートに基づいて第1の保持部材および第2の保持部材の一方を他方に対して相対的に回動させてもよい。
【0025】
この場合、制御手段は、ロールレート検出手段によって検出された自動二輪車のロールレートに基づいて、第1の保持部材および第2の保持部材の一方を他方に対して前後方向に延びる軸周りで相対的に回動させる。それにより、前輪の横力と後輪の横力との比率を調整し、自動二輪車のロールレートを低減することができる。その結果、自動二輪車の走行安定性が向上するとともに、旋回性の低下を防止することができる。
【0026】
また、上記前後方向に延びる軸の延長線が後輪と地面との略接点を通過するように第1の保持部材および第2の保持部材が取り付けられている。そのため、第1の保持部材に対して第2の保持部材を回動させる場合、後輪は地面との接点近傍を中心に回動する。それにより、後輪が地面に対して滑ることを防止することができ、安全性が向上する。
【0027】
(9)制御システムは、自動二輪車の車速を検出する速度検出手段をさらに備え、制御装置は、ロールレート検出手段によって検出されたロールレートと係数との積に基づいて第1の保持部材に対する第2の保持部材の相対的な回動角度を決定し、係数は、速度検出手段によって検出された車速に基づいて決定されてもよい。
【0028】
この場合、自動二輪車のロールレートおよび車速に応じて第1の保持部材に対する第2の保持部材の相対的な回動角度を決定することができる。それにより、自動二輪車のロールレートを確実に低減することができる。その結果、自動二輪車の走行安定性が確実に向上するとともに、旋回性の低下を確実に防止することができる。
【0029】
(10)制御装置は、速度検出手段によって検出された車速に基づいて決定される応答速度で第1の保持部材および第2の保持部材の一方を他方に対して相対的に回動させてもよい。
【0030】
この場合、車速に応じた応答速度で第1の保持部材および第2の保持部材の一方が他方に対して相対的に回動されるので、二輪車特有の不安定現象を確実に防止することができる。それにより、自動二輪車の走行安定性が確実に向上するとともに、旋回性の低下を確実に防止することができる。
【0031】
(11)制御装置は、1次遅れ要素で第1の保持部材および第2の保持部材の一方を他方に対して相対的に回動させ、1次遅れ要素の時定数は、速度検出手段によって検出された車速に基づいて決定されてもよい。
【0032】
この場合、自動二輪車の車速に応じた時定数の1次遅れ要素で第1の保持部材および第2の保持部材の一方が他方に対して相対的に回動されるので、二輪車特有の不安定現象をより確実に防止することができる。それにより、自動二輪車の走行安定性がより確実に向上するとともに、旋回性の低下をより確実に防止することができる。
【0033】
(12)第3の発明に係る自動二輪車は、第1または第2の発明に係る制御システムと、後輪を回転させるための駆動力を発生する駆動手段と、駆動手段により発生された駆動力を後輪へ伝達するための駆動力伝達手段とを備えたものである。
【0034】
本発明に係る自動二輪車においては、駆動手段によって発生された駆動力が駆動力伝達手段によって後輪へ伝達され、後輪が駆動される。また、第1または第2の発明に係る制御システムにより自動二輪車の姿勢が制御される。
【0035】
この場合、第1または第2の発明に係る制御システムにより、前輪の横力と後輪の横力との比率が調整されるので、自動二輪車のロールレートを低減することができる。それにより、自動二輪車の走行安定性が向上するとともに、旋回性の低下を防止することができる。
【発明の効果】
【0036】
本発明によれば、前輪の横力と後輪の横力との比率が調整されるので、自動二輪車のロールレートを低減することができる。それにより、自動二輪車の走行安定性が向上するとともに、旋回性の低下を防止することができる。
【発明を実施するための最良の形態】
【0037】
以下、本発明の実施の形態に係るシステムおよびそれを備える自動二輪車について図面を参照しながら説明する。
【0038】
(第1の実施の形態)
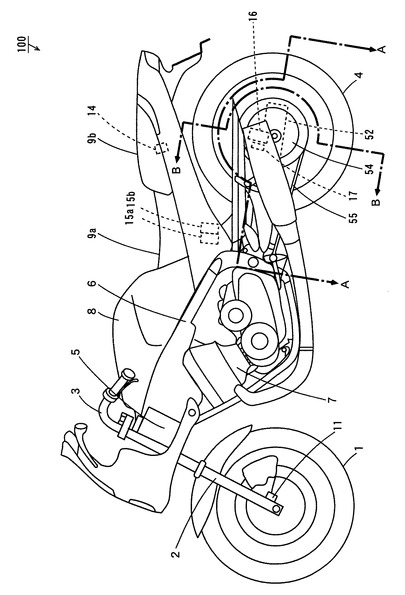
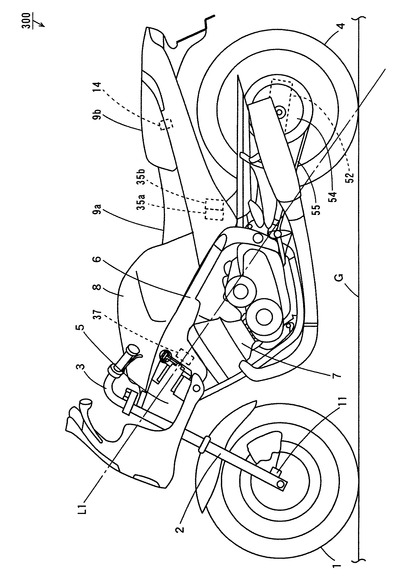
図1は、本発明の第1の実施の形態に係る自動二輪車の外観側面図である。
【0039】
この自動二輪車100においては、前輪1がフロントフォーク2により回転可能に保持されている。フロントフォーク2は、ヘッドパイプ5に左右方向へ揺動可能に設けられている。フロントフォーク2の上端部にはハンドル3が取り付けられている。
【0040】
乗り手がハンドル3を操作することにより、フロントフォーク2が自動二輪車100の左右方向に揺動する。それにより、前輪1の操舵が行われる。
【0041】
ヘッドパイプ5の後部に本体フレーム6が設けられている。本体フレーム6の中央部にはエンジン7が保持されている。エンジン7の上部には燃料タンク8が設けられ、燃料タンク8の後方には前部シート9aおよび後部シート9bが設けられている。
【0042】
エンジン7の後方に延びるように本体フレーム6にリヤアーム52(図2および図3参照)が接続されている。リヤアーム52は、後輪4およびチェーンスプロケット54を回転可能に保持する。
【0043】
フロントフォーク2の下端部近傍には車速センサ11が設けられている。また、後部シート9bの下方にはロールレートセンサ14が設けられている。
【0044】
リヤアーム52の後輪4側には後輪舵角センサ17が設けられている。さらに、前部シート9aの下方には操舵量演算装置15aおよび操舵角制御装置15bが設けられ、リヤアーム52の後輪4側にはアクチュエータ16が設けられている。車速センサ11、ロールレートセンサ14、操舵量演算装置15a、操舵角制御装置15b、アクチュエータ16および後輪舵角センサ17の詳細は後述する。
【0045】
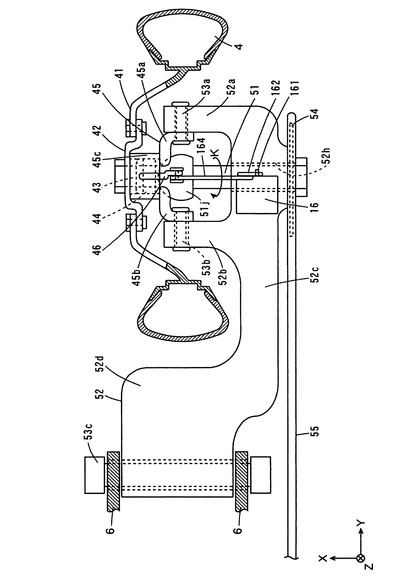
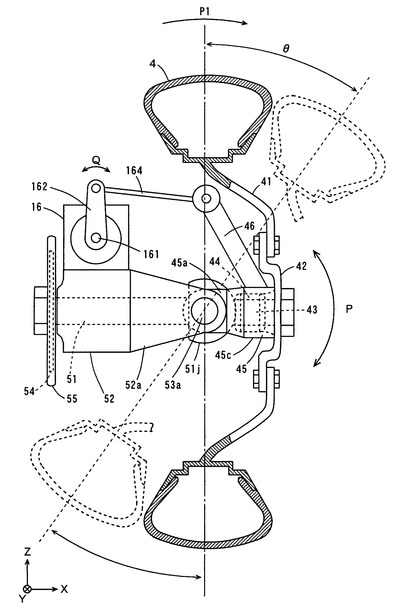
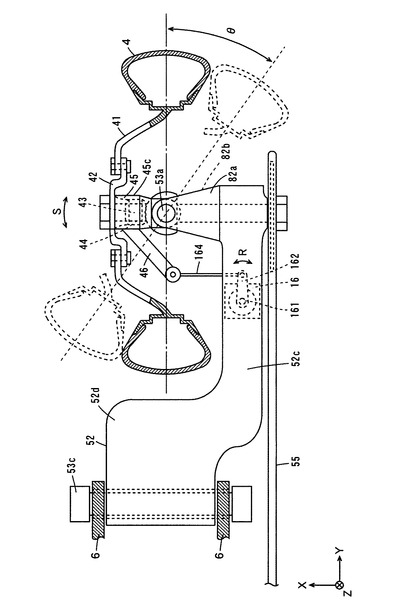
図2は図1の自動二輪車100におけるA−A矢視断面図であり、図3は図1の自動二輪車100におけるB−B矢視断面図である。図2および図3においては、矢印で示すように、自動二輪車100の左右方向をX方向と定義し、自動二輪車100の前後方向をY方向と定義し、自動二輪車100の上下方向をZ方向と定義する。
【0046】
図2に示すように、本体フレーム6には回転連結軸53cを介してY方向に延びるリヤアーム52の一端が接続されている。これにより、リヤアーム52が上下に揺動可能となっている。
【0047】
リヤアーム52は、本体フレーム6との接続部周辺において、X方向に幅広に形成された幅広部52dを有する。幅広部52dからX方向に偏った位置からY方向へ延びるように、幅広部52dよりも幅の狭い幅狭部52cが形成されている。
【0048】
幅狭部52cの中央および端部からX方向へ2つの支持部52a,52bが互いに平行に延びている。
【0049】
支持部52a,52b間の幅狭部52cには、X方向に延びる駆動軸保持孔52hが形成されている。駆動軸保持孔52hには駆動軸51が挿入されている。これにより、駆動軸51はリヤアーム52に回転可能に保持されている。駆動軸51の一端は等速型自在継手51jに連結されている。
【0050】
図2および図3では、等速型自在継手51jが簡易的に示されているが、等速型自在継手51jは、駆動軸51の一端を保持するインナーレース、インナーレースを覆うように形成されたアウターレース、インナーレースおよびアウターレース間に取り付けられる複数のボールおよびブーツ等により構成されている。
【0051】
等速型自在継手51jは、支持部52a,52b間に位置し、後述の後輪回転軸43に接続されている。駆動軸51の他端には、チェーンスプロケット54が接続されている。チェーンスプロケット54にチェーン55が架けられている。
【0052】
支持部52a,52bのそれぞれの先端部近傍には、回転連結軸53a,53bを介して車軸支持部材45の連結部45a,45bが取り付けられている。これにより、車軸支持部材45はリヤアーム52の支持部52a,52bに対して、回転連結軸53a,53bを中心として図3の矢印Pに示すように揺動可能である。
【0053】
車軸支持部材45の連結部45a,45bは、それぞれXY平面においてL字状に形成され、互いに対向するように設けられている。また、車軸支持部材45には、連結部45a,45bからX方向に延びる筒状部45cが形成されている。
【0054】
筒状部45cの内側にはベアリング44を介して後輪回転軸43が回転可能に保持されている。後輪回転軸43の一端は等速型自在継手51jに接続されている。また、後輪回転軸43の他端は後輪ハブ42に接続されている。なお、後輪回転軸43の一端が等速型自在継手51jのアウターレースと一体形成されてもよい。
【0055】
後輪ハブ42はZY平面において略円形状を有する(図示せず)。後輪ハブ42には後輪ホイール41が接続されている。後輪ホイール41の外周部には後輪4、すなわち後輪タイヤが装着されている。
【0056】
図1のエンジン7の駆動力がチェーン55を介してチェーンスプロケット54に伝達され、チェーンスプロケット54が回転する。チェーンスプロケット54の回転とともに駆動軸51が図2の矢印Kに示すように回転する。それにより、後輪回転軸43が回転し、後輪ハブ42、後輪ホイール41および後輪4が回転する。
【0057】
本実施の形態においては、駆動軸51および後輪回転軸43が等速型自在継手51jを介して接続されることにより、駆動軸51の軸心と後輪回転軸43の軸心とがずれた場合でも、等速ジョイント51の回転力が後輪回転軸43に伝達される。
【0058】
リヤアーム52の幅狭部52c上にはアクチュエータ16が設けられている。また、車軸支持部材45の筒状部45cの上部には、Z方向に対して傾斜して延びるようにナックルアーム46が一体形成されている。
【0059】
アクチュエータ16は、例えばサーボモータを備える。本例では、図2および図3に示すように、アクチュエータ16の略中央部からY方向に延びるようにサーボモータの回転軸161が突出している。
【0060】
回転軸161には回動アーム162の一端が連結されている。回動アーム162の他端にはタイロッド164の一端が揺動可能に連結されている。タイロッド164の他端はナックルアーム46の上端に揺動可能に連結されている。
【0061】
アクチュエータ16が動作することにより回転軸161が回転する。これにより、回動アーム162の他端が回転軸161を中心に矢印Qの方向に揺動する。それにより、タイロッド164を介してナックルアーム46の上端部がX方向に移動する。その結果、上述のように、車軸支持部材45が回転連結軸53a,53bを中心として矢印Pで示すように揺動する。
【0062】
このように、アクチュエータ16が動作することにより後輪4がXZ面内でZ方向に対して傾斜する。以下の説明において、Z方向を基準とした後輪4の傾斜角度を後輪舵角θ1と呼ぶ。アクチュエータ16は操舵角制御装置15bにより制御される。
【0063】
ここで、本発明者らは、種々の実験等により、低速走行時のふらつき、高速走行時に発生する不快な振動、および強風または地面の凹凸等の外的な影響による挙動の乱れ等の二輪車特有の不安定現象は、二輪車のロールレートを低減させることにより防止することが可能であることを見出した。また、本発明者らは、二輪車の速度によって上記の不安定現象の周波数およびその減衰率が決まっていることにも着目した。
【0064】
そこで、本実施の形態においては、自動二輪車100の速度に応じて比例定数を決定し、その比例定数を自動二輪車100のロールレートに乗算することにより後輪4の目標操舵角を決定する。この目標操舵角で後輪4を操舵することにより、前輪1の横力と後輪4の横力との比率を調整する。それにより、自動二輪車100のロールレートを低減させる。その結果、上記の不安定現象を防止することができる。なお、比例定数は、前輪1の横力と後輪4の横力との比率が自動二輪車100のロールレートを低減させるために最適な値になるように決定される。
【0065】
また、上記の不安定現象の周波数およびその減衰率を考慮して、自動二輪車100の速度に基づいて応答速度を決定し、その応答速度で後輪4が目標操舵角になるように後輪4を操舵する。これにより、上記の不安定現象をより確実に防止することが可能となる。詳細は後述する。
【0066】
以下に、本実施の形態に係る自動二輪車100の制御システムおよびその制御方法について説明する。
【0067】
図4は、本実施の形態に係る自動二輪車100の制御システム10の一例を示すブロック図である。
【0068】
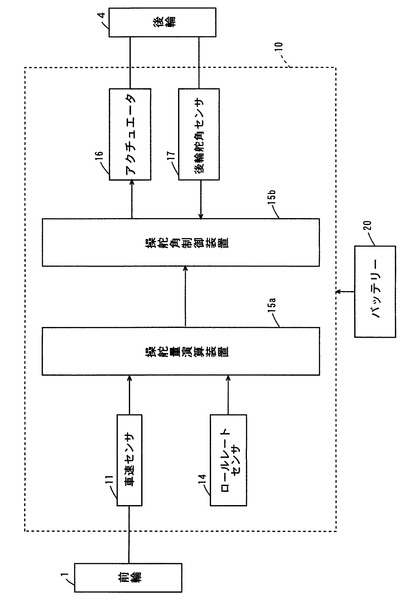
図4に示すように、自動二輪車100の制御システム10は、車速センサ11、ロールレートセンサ14、操舵量演算装置15a、操舵角制御装置15b、アクチュエータ16および後輪舵角センサ17を備える。
【0069】
ここで、制御システム10にはバッテリー20から電力が供給される。車速センサ11は前輪1の回転数に基づいて自動二輪車100の速度を検出する。ロールレートセンサ14は、自動二輪車100のロールレート、すなわちローリングの方向における自動二輪車100の角速度を検出する。後輪舵角センサ17は後輪舵角θ1を検出する。
【0070】
操舵量演算装置15aおよび操舵角制御装置15bは、例えば、CPU(中央演算処理装置)および記憶装置またはマイクロコンピュータにより構成される。操舵量演算装置15aには、車速センサ11およびロールレートセンサ14の検出値が入力される。操舵量演算装置15aは入力された各検出値に基づいて後輪4の目標操舵角を算出する。操舵角制御装置15bは、操舵量演算装置15aによって算出された目標操舵角に基づいてアクチュエータ16の動作を制御する。
【0071】
操舵角制御装置15bがアクチュエータ16の動作を制御することにより、後輪4の後輪舵角θ1が調整される。調整された後輪舵角θ1は後輪舵角センサ17により検出され、検出された後輪舵角θ1は操舵角制御装置15bに入力される。このように、後輪舵角θ1に基づいてアクチュエータ16がフィードバック制御される。
【0072】
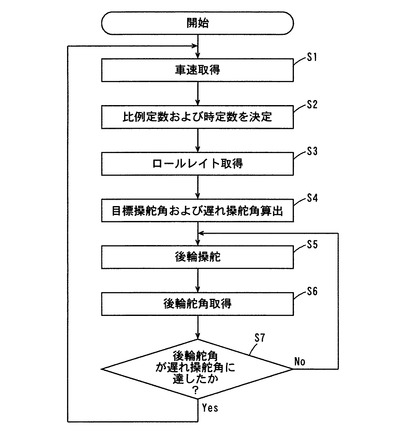
図5は、本実施の形態に係る自動二輪車100の制御システム10による制御方法の一例を示すフローチャートである。
【0073】
図5に示すように、まず、制御システム10(図4参照)の操舵量演算装置15aは、車速センサ11から自動二輪車100の速度を取得する(ステップS1)。次に、操舵量演算装置15aは、ステップS1において取得した自動二輪車100の速度に基づいて、比例定数および時定数を決定する(ステップS2)。なお、比例定数および時定数は車速に応じて変化する。比例定数と車速との関係は操舵量演算装置15aに記憶されている。
【0074】
次に、操舵量演算装置15aは、ロールレートセンサ11からロールレートγを取得する(ステップS3)。次いで、操舵量演算装置15aは、下記式(1)および下記式(2)により後輪4の目標操舵角δ1および遅れ操舵角δ2を算出する(ステップS4)。
【0075】
δ1=K・γ・・・・・・(1)
δ2=δ1/(Ts+1)・・・・・(2)
なお、上式(1)において、KはステップS2において決定された比例定数である。また、上式(2)において、TはステップS2において決定された時定数であり、sはラプラス演算子である。
【0076】
次に、操舵量演算装置15aは、上式(2)によって決定される後輪4の遅れ操舵角δ2を操舵角制御装置15bに与え、操舵角制御装置15bは与えられた遅れ操舵角δ2に基づいてアクチュエータ16を制御することにより後輪4を操舵する(ステップS5)。つまり、本実施の形態においては、比例定数Kに応じて後輪4の目標操舵角δ1(=K・γ)が決定され、時定数Tの一次遅れ要素で後輪4が遅れ操舵角δ2になるように後輪4が操舵される。
【0077】
次に、操舵角制御装置15bは、後輪舵角センサ17から後輪舵角θ1を取得する(ステップS6)。次いで、操舵角制御装置15bは、ステップS6で取得した後輪舵角θ1が遅れ操舵角δ2に達したか否かを判別する(ステップS7)。後輪舵角θ1が遅れ操舵角δ2に達している場合、操舵量演算装置15aは、ステップS1に戻る。
【0078】
ステップS7において後輪舵角θ1が遅れ操舵角δ2に達していない場合、操舵角制御装置15bは、後輪舵角θ1が遅れ操舵角δ2に達するまでステップS5からステップS7の処理を繰り返す。
【0079】
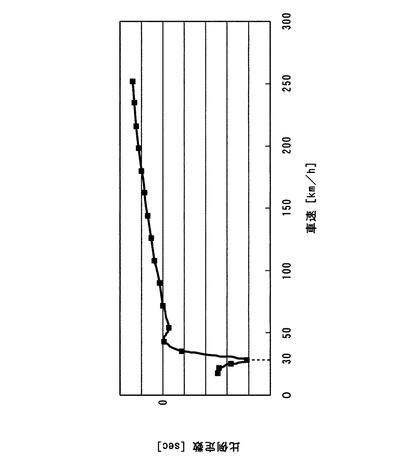
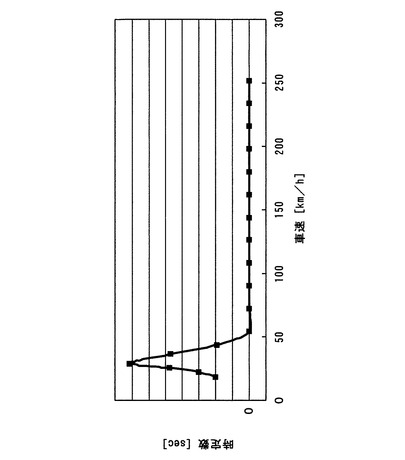
なお、ステップS2において決定される比例定数Kおよび時定数Tは、例えば、図6および図7に示すような値になる。図6において、縦軸は比例定数Kを示し、横軸は車速を示す。また、図7において、縦軸は時定数Tを示し、横軸は車速を示す。時定数Tおよび比例定数Kは、上述した不安定現象を防止することができるように、自動二輪車100の構造等を考慮して、種々の実験および解析等により、車速に応じて適宜決定される。
【0080】
なお、例えば、図3の矢印P1で示す方向のロールレートを正の値とすると、目標操舵角δ1は、Z方向を基準として矢印P1と同じ方向に傾斜させる場合には正の値となり、矢印P1と逆方向に傾斜させる場合には負の値となる。例えば、車速が30km/hのときに検出されたロールレートγが正の値である場合、図6の例では、車速が30km/hのときの比例定数Kは負の値であるので、目標舵角δ1は負の値になる。したがって、後輪4は矢印P1と逆方向に傾斜するように制御される。一方、車速が30km/hのときに検出されたロールレートγが負の値である場合、目標操舵角δ1は正の値になり、後輪4は矢印P1と同じ方向に傾斜するように制御される。
【0081】
また、図7の例では、中低速において時定数Tの値が上昇している。この例では、自動二輪車100が中低速で走行している場合には、後輪4がある程度の時間をかけて操舵される。また、自動二輪車100が高速で走行している場合には、後輪4が短時間で操舵される。このように、車速に応じて時定数Tを決定することにより、常に安定した走行が可能になる。
【0082】
以上のように、本実施の形態においては、自動二輪車100のロールレートγおよび車速を検出し、検出されたロールレートγ、および車速に応じて決定される比例定数Kに基づいて後輪4の舵角を制御している。それにより、前輪1の横力と後輪4の横力との比率を調整し、自動二輪車100のロールレートを低減している。その結果、走行安定性が向上するとともに、旋回性の低下を防止することができる。
【0083】
また、二輪車特有の不安定現象の周波数およびその減衰率を考慮して時定数Tを決定し、その時定数Tの一次遅れ要素で後輪4の舵角を制御している。つまり、自動二輪車100の速度に応じた応答速度で後輪4を操舵している。それにより、走行安定性が確実に向上するとともに、旋回性の低下を確実に防止することができる。
【0084】
また、車速およびロールレートγのみに基づいて目標操舵角δ1および遅れ操舵角δ2を決定することができるので、後輪4の制御が容易になる。
【0085】
(第2の実施の形態)
第2の実施の形態に係る自動二輪車が第1の実施の形態に係る自動二輪車100と異なるのは以下の点である。なお、第2の実施の形態に係る自動二輪車の外観側面図は第1の実施の形態に係る自動二輪車100と同じであるので、図1を参照しながら説明する。
【0086】
図8は、図1のB−B矢視断面図である。図8に示すように、第2の実施の形態においては、本体フレーム6には回転連結軸53cを介してY方向に延びるリヤアーム52の一端が接続されている。これにより、リヤアーム52が上下に揺動可能となっている。
【0087】
リヤアーム52は、本体フレーム6との接続部周辺において、X方向に幅広に形成された幅広部52dを有する。幅広部52dからX方向に偏った位置からY方向へ延びるように、幅広部52dよりも幅の狭い幅狭部52cが形成されている。
【0088】
幅狭部52cの端部には、XZ平面において図2の支持部52a,52bと同様の構造を有する支持部82a,82bが形成されている。
【0089】
支持部82a,82b間には、図2と同様の構成で、車軸支持部材45および等速型自在継手51jが取り付けられている。また、車軸支持部材45には、図2と同様の構成で後輪回転軸43、後輪ハブ42、後輪ホイール41および後輪4が取り付けられている。
【0090】
リヤアーム52の幅狭部52c内にはアクチュエータ16が設けられている。また、車軸支持部材45の筒状部45cのY方向の一端部には、Y方向に対して傾斜して延びるようにナックルアーム46が一体形成されている。
【0091】
アクチュエータ16の回転軸161には回動アーム162の一端が連結されている。回動アーム162の他端にはタイロッド164の一端が揺動可能に連結されている。
【0092】
アクチュエータ16が動作することにより回転軸161が回転する。これにより、回動アーム162の他端が回転軸161を中心に矢印Rの方向に揺動する。それにより、タイロッド164を介してナックルアーム46のタイロッド164との連結部がX方向に移動する。その結果、車軸支持部材45が回転連結軸53a,53bを中心として矢印Sで示すように揺動する。
【0093】
このように、アクチュエータ16が動作することにより後輪4がXY平面でY方向に対して傾斜する。本実施の形態においては、Y方向を基準とした後輪4の傾斜角度を後輪舵角θ1とする。なお、XY平面では、後輪4はZ方向に対して揺動しないように固定されている。
【0094】
上記のような構成により、上述した(1)式および(2)式を用いて図5で説明した制御方法と同様に後輪舵角θ1が制御される。なお、比例定数Kおよび時定数Tは、上述したように、二輪車構造等を考慮して、種々の実験および解析等により、車速に応じて適宜決定される。
【0095】
以上のように、本実施の形態においても、自動二輪車のロールレートγおよび車速を検出し、検出されたロールレートγ、および車速に応じて決定される比例定数Kに基づいて後輪4の舵角を制御している。それにより、前輪1の横力と後輪4の横力との比率を調整し、自動二輪車のロールレートを低減している。その結果、走行安定性が向上するとともに、旋回性の低下を防止することができる。
【0096】
また、二輪車特有の不安定現象の周波数およびその減衰率を考慮して時定数Tを決定し、その時定数Tの一次遅れ要素で後輪4の舵角を制御している。つまり、自動二輪車の速度に応じた応答速度で後輪4を操舵している。それにより、走行安定性が確実に向上するとともに、旋回性の低下を確実に防止することができる。
【0097】
(第3の実施の形態)
第3の実施の形態に係る自動二輪車が第1および第2の実施の形態に係る自動二輪車と異なるのは以下の点である。
【0098】
図9は、本発明の第3の実施の形態に係る自動二輪車の外観側面図である。なお、第3の実施の形態においては、後輪4は操舵されず、揺動しないように固定されている。
【0099】
図9に示すように、第3の実施の形態に係る自動二輪車300においては、前部シート9aの下方に、傾斜量演算装置35aおよび傾斜角制御装置35bが設けられ、本体フレーム6に傾斜角センサ37が設けられている。
【0100】
また、ヘッドパイプ5と本体フレーム6とは、回動可能に連結されている。以下、ヘッドパイプ5と本体フレーム6との連結部の構造について説明する。
【0101】
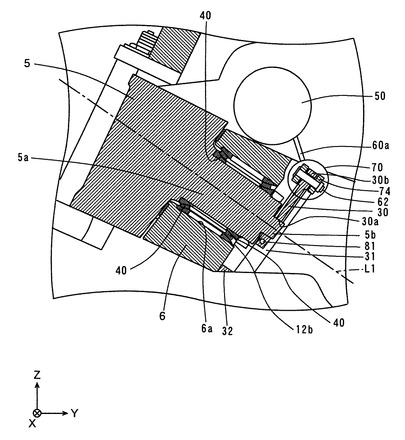
図10は、ヘッドパイプ5と本体フレーム6との連結部の概略縦断面図であり、図11は、ヘッドパイプ5と本体フレーム6との連結部の概略上面図であり、図12は、ヘッドパイプ5と本体フレーム6との連結部の概略背面図である。なお、図10〜図12においても、図2と同様に自動二輪車の左右方向をX方向と定義し、自動二輪車の前後方向をY方向と定義し、自動二輪車の上下方向をZ方向と定義する。
【0102】
図10に示すように、ヘッドパイプ5の後部には円柱形状の軸部5aが形成されている。本体フレーム6の前部の中央部には、軸挿入孔6aが形成されている。この軸挿入孔6aに、軸部5aが挿入される。
【0103】
軸挿入孔6aの内周面と軸部5aとの間には、円錐ころ軸受(テーパーローラ軸受)40が設けられている。これにより、ヘッドパイプ5は、軸部5aの前後方向に延びる軸心L1を中心として本体フレーム6に対して回動可能となる。なお、円錐ころ軸受40は、その中心軸が軸心L1と実質的に同一になるように設けられる。また、軸心L1の延長線は、図9に示すように、後方斜め下方向に延びるとともに、後輪4と地面Gとの接点近傍を通過するように形成されている。
【0104】
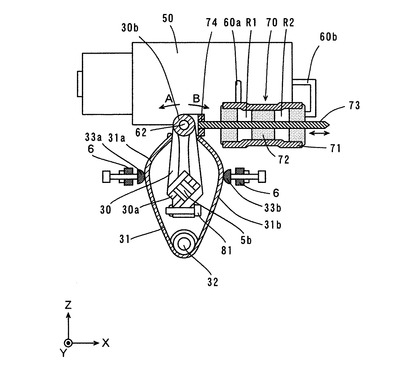
ヘッドパイプ5の軸部5aの後端部には、断面矩形状(図12参照)の突出部5bが形成されている。この突出部5bには、駆動伝達機能を有する回動部材30がボルト81により固定されている。図12に示すように、回動部材30の一端部には、軸部5aの突出部5bに係合する断面矩形状の係合孔を有する係合部30aが形成され、他端部には、断面円形の係合孔を有する係合部30bが形成されている。
【0105】
図10および図12に示すように、本体フレーム6には、回動部材30を両側方から挟み込むように、板ばね31が支持部材32を介して取り付けられている。板ばね31は、回動部材30の左側方に当接するばね部31aと、回動部材30の右側方に当接するばね部31bとを有している。
【0106】
本体フレーム6には、板ばね31のばね部31aおよび31bに当接するとともに、回動部材30の矢印A方向および矢印B方向の回動角度を制限する一対の位置規制部材33a,33bが互いに対向するように取り付けられている。この位置規制部材33a,33bは、回動部材30の回動方向(矢印A,Bで示す方向)における中立位置が保持されるように取り付けられている。すなわち、回動部材30が矢印A方向または矢印B方向に回動して中立位置に位置していない場合には、ばね部31aまたはばね部31bにより回動部材30を中立位置に戻そうとする抗力が働く。
【0107】
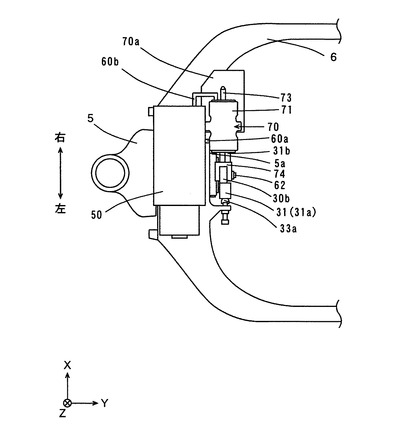
図10および図11に示すように、本体フレーム6の上部には、シリンダブラケット70a(図11参照)を介して、ヘッドパイプ5を本体フレーム6に対して回動させるための油圧シリンダ(アクチュエータ)70が取り付けられている。図11および図12に示すように、油圧シリンダ70は、チューブ71、チューブ71の内部に設けられるピストン72(図12)、ピストン72に固定されるピストンロッド73およびピストンロッド73の一端部に取り付けられる連結部材74を含む。
【0108】
チューブ71は、シリンダブラケット70aに固定されている。また、図12に示すように、チューブ71の内部はピストン72により2つの領域R1,R2に分割されており、各領域R1,R2にはオイルが充填されている。
【0109】
油圧シリンダ70の上方には、ポンプ部50が設けられている。油圧シリンダ70の領域R1,R2とポンプ部50とは、油圧パイプ60a,60bにより接続されている。油圧シリンダ70へのオイルの供給は、油圧パイプ60a,60bを介してポンプ部50により行なわれる。ピストンロッド73は、チューブ71を貫通するように設けられている。
【0110】
図11に示すように、連結部材74は、ボルト62により回動部材30の係合部30bに連結されている。本実施の形態においては、チューブ71は本体フレーム6に接続され、ピストン72およびピストンロッド73は回動部材30を介してヘッドパイプ5に接続される。
【0111】
このような構成により、油圧シリンダ70のピストン72の直線運動が回動部材30の回転運動に変換されてヘッドパイプ5の軸部5aに伝達され、ヘッドパイプ5を本体フレーム6に対して軸心L1(図10参照)を中心に回動させることができる。したがって、シリンダ70へのオイルの供給量を制御することにより、ヘッドパイプ5を回動させることができる。
【0112】
次に、本実施の形態に係る自動二輪車300の制御システムおよびその制御方法について説明する。
【0113】
図13は、本実施の形態に係る自動二輪車300の制御システム10Aの一例を示すブロック図である。
【0114】
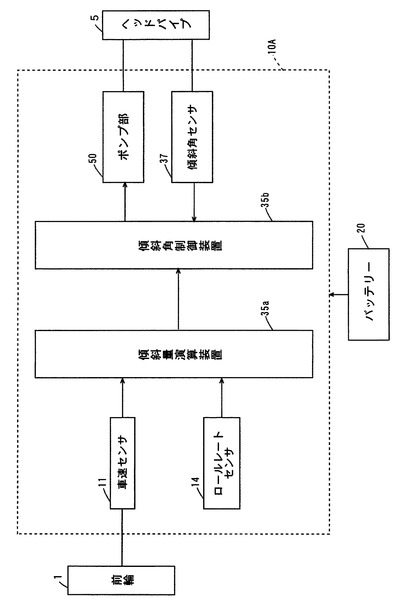
図13に示すように、自動二輪車300の制御システム10Aは、車速センサ11、ロールレートセンサ14、傾斜量演算装置35aおよび傾斜角制御装置35b、傾斜角センサ37およびポンプ部50を備える。また、制御システム10Aにはバッテリー20から電力が供給される。
【0115】
傾斜角センサ37は、回動部材30の中立位置からの傾斜角度を検出することにより、ヘッドパイプ5の本体フレーム6に対する左右方向への相対的な傾斜角度θ2を検出する。
【0116】
傾斜量演算装置35aおよび傾斜角制御装置35bは、例えば、CPU(中央演算処理装置)および記憶装置またはマイクロコンピュータにより構成される。傾斜量演算装置35aには、車速センサ11およびロールレートセンサ14の検出値が入力される。傾斜量演算装置35aは入力された各検出値に基づいてヘッドパイプ5の目標傾斜角を算出する。傾斜角制御装置35bは、傾斜量演算装置35によって算出された目標傾斜角に基づいてポンプ部50の動作を制御する。
【0117】
傾斜角制御装置35bがポンプ部50(油圧シリンダ70)の動作を制御することにより、ヘッドパイプ5の傾斜角度θ2が調整される。調整された傾斜角度θ2は傾斜角センサ37により検出され、検出された傾斜角度θ2は傾斜角制御装置35bに入力される。このように、傾斜角度θ2に基づいてポンプ部50(油圧シリンダ70)がフィードバック制御される。
【0118】
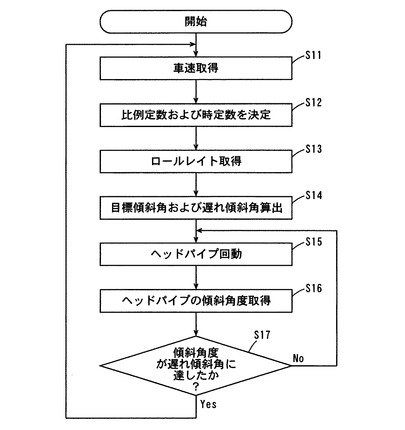
図14は、本実施の形態に係る自動二輪車300の制御システム10Aによる制御方法の一例を示すフローチャートである。
【0119】
図14に示すように、まず、制御システム10A(図13参照)の傾斜量演算装置35aは、車速センサ11から自動二輪車300の速度を取得する(ステップS11)。次に、傾斜量演算装置35aは、ステップS11において取得した自動二輪車300の速度に基づいて、比例定数および時定数を決定する(ステップS12)。
【0120】
次に、傾斜量操舵装置35aは、ロールレートセンサ11からロールレートγを取得する(ステップS13)。次いで、傾斜量演算装置35aは、上述した式(1)および式(2)によりヘッドパイプ5の目標傾斜角δ1および遅れ傾斜角δ2を算出する(ステップS14)。
【0121】
次に、傾斜量操舵装置35aは、上述した式(2)によって決定されるヘッドパイプ5の遅れ傾斜角δ2を傾斜角制御装置35bに与え、傾斜角制御装置35bは与えられた遅れ傾斜角δ2に基づいてポンプ部50(油圧シリンダ70)を制御し、ヘッドパイプ5を回動させる(ステップS15)。
【0122】
次に、傾斜角制御装置35bは、傾斜角センサ37からヘッドパイプ5の傾斜角度θ2を取得する(ステップS16)。次いで、傾斜角制御装置35bは、ステップS16で取得した傾斜角度θ2が遅れ傾斜角δ2に達したか否かを判別する(ステップS17)。傾斜角度θ2が遅れ傾斜角δ2に達している場合、傾斜量演算装置35aは、ステップS11に戻る。
【0123】
ステップS17において傾斜角度θ2が遅れ傾斜角δ2に達していない場合、傾斜角制御装置35bは、傾斜角度θ2が遅れ傾斜角δ2に達するまでステップS15からステップS17の処理を繰り返す。
【0124】
なお、比例定数Kおよび時定数Tは、第1および第2の実施の形態において説明したように、自動二輪車300の構造等を考慮して、種々の実験および解析等により、車速に応じて適宜決定される。すなわち、比例定数Kおよび時定数Tは、第1、第2および第3の実施の形態においてそれぞれ異なる。
【0125】
以上のように、本実施の形態においては、自動二輪車300のロールレートγおよび車速を検出し、検出されたロールレートγ、および車速に応じて決定される比例定数Kに基づいてヘッドパイプ5の傾斜角度θ2を制御している。それにより、前輪1の横力と後輪4の横力との比率を調整し、自動二輪車300のロールレートを低減している。その結果、走行安定性が向上するとともに、旋回性の低下を防止することができる。
【0126】
また、二輪車特有の不安定現象の周波数およびその減衰率を考慮して時定数Tを決定し、その時定数Tの一次遅れ要素でヘッドパイプ5の傾斜角度を制御している。つまり、自動二輪車100の速度に応じた応答速度でヘッドパイプ5を傾斜させている。それにより、走行安定性が確実に向上するとともに、旋回性の低下を確実に防止することができる。
【0127】
また、軸心L1の延長線が後輪4と地面Gとの略接点を通過するようにヘッドパイプ5および本体フレーム6が取り付けられている。そのため、ヘッドパイプ5に対して本体フレーム6を回動させる場合、後輪4は地面Gとの接点近傍を中心に回動する。それにより、後輪4が地面Gに対して滑ることを防止することができ、安全性が向上する。
【0128】
また、車速およびロールレートγのみに基づいて目標傾斜角δ1および遅れ傾斜角δ2を決定することができるので、制御が容易である。
【0129】
(他の実施の形態)
上記第1〜第3の実施の形態においては、1次遅れ要素によって後輪舵角θ1または傾斜角度θ2を制御しているが、1次進み要素またはウォッシュアウトフィルタ等によって後輪舵角θ1または傾斜角度θ2を制御してもよい。
【0130】
また、第3の実施の形態においては、ヘッドパイプ5を回動させることにより本体フレーム6に対するヘッドパイプ5の傾斜角度を制御しているが、本体フレーム6を回動させることにより、ヘッドパイプ5に対する本体フレーム6の傾斜角度を制御してもよい。
【0131】
(請求項の各構成要素と実施の形態の各部との対応)
第1および第2の実施の形態においては、ヘッドパイプ5および本体フレーム6が保持部材に相当し、リヤアーム52、ベアリング44、車軸支持部材45、ナックルアーム46、タイロッド164が後輪支持機構に相当し、ロールレートセンサ14がロールレート検出手段に相当し、アクチュエータ16が揺動手段に相当し、操舵量演算装置15aおよび操舵角制御装置15bが制御手段に相当し、車速センサ11が速度検出手段に相当し、比例定数Kが係数に相当する。
【0132】
また、第3の実施の形態においては、ヘッドパイプ5が第1の保持部材に相当し、本体フレーム6が第2の保持部材に相当し、ロールレートセンサ14がロールレート検出手段に相当し、回動部材30、板ばね31、ポンプ部50および油圧シリンダ70が揺動手段に相当し、傾斜量演算装置35aおよび傾斜角制御装置35bが制御手段に相当し、軸心L1が前後方向に延びる軸に相当し、車速センサ11が速度検出手段に相当し、比例定数Kが係数に相当する。
【0133】
また、上記第1〜第3の実施の形態においては、エンジン7が駆動手段に相当し、チェーンスプロケット54およびチェーン55が駆動力伝達手段に相当する。
【産業上の利用可能性】
【0134】
本発明は、自動二輪車の制御システムとして有効に利用可能である。
【図面の簡単な説明】
【0135】
【図1】第1の実施の形態に係る自動二輪車の外観側面図である。
【図2】図1の自動二輪車におけるA−A矢視断面図である。
【図3】図1の自動二輪車におけるB−B矢視断面図である。
【図4】第1の実施の形態に係る自動二輪車の制御システムの一例を示すブロック図である。
【図5】第1の実施の形態に係る自動二輪車の制御システムによる制御方法の一例を示すフローチャートである。
【図6】比例定数の一例を示す図である。
【図7】時定数の一例を示す図である。
【図8】図1のB−B矢視断面図である。
【図9】第3の実施の形態に係る自動二輪車の外観側面図である。
【図10】ヘッドパイプと本体フレームとの連結部の概略側面断面図である。
【図11】ヘッドパイプと本体フレームとの連結部の概略上面図である。
【図12】ヘッドパイプと本体フレームとの連結部の概略背面図である。
【図13】第3の実施の形態に係る自動二輪車の制御システムの一例を示すブロック図である。
【図14】第3の実施の形態に係る自動二輪車の制御システムによる制御方法の一例を示すフローチャートである。
【符号の説明】
【0136】
1 前輪
2 フロントフォーク
3 ハンドル
4 後輪
5 ヘッドパイプ
6 本体フレーム
7 エンジン
10,10A 制御システム
11 車速センサ
14 ロールレートセンサ
15a 操舵量演算装置
15b 操舵角制御装置
16 アクチュエータ
17 後輪舵角センサ
30 回動部材
31 板ばね
35a 傾斜量演算装置
35b 傾斜角制御装置
37 傾斜角センサ
43 後輪回転軸
44 ベアリング
45 車軸支持部材
46 ナックルアーム
50 ポンプ部
51 駆動軸
51j 等速型自在継手
52 リヤアーム
54 チェーンスプロケット
55 チェーン
70 油圧シリンダ
100,300 自動二輪車
164 タイロッド
【技術分野】
【0001】
本発明は、自動二輪車の制御システムおよびそれを備えた自動二輪車に関する。
【背景技術】
【0002】
従来より、自動二輪車の前輪の操舵に応じて後輪を操舵する前後輪操舵装置の開発が進められている。
【0003】
従来の前後輪操舵装置としては、前輪の舵角に応じて後輪を機械的または電気的に操舵する機構を有するもの(例えば、特許文献1、2および3)、および後輪に加わる横力に応じて自動的に後輪を操舵する機構を有するもの(例えば、特許文献4および5)等がある。
【0004】
しかしながら、上記特許文献1〜5の機構を用いた場合、自動二輪車が直進している際の安定性は向上するが、旋回時の安定性が低下する。
【0005】
そこで、例えば、特許文献6に記載されている前後輪操向装置においては、高速走行時と中低速走行時とで後輪の操舵量を変えている。それにより、高速走行時と中低速走行時とで、それぞれ所望の直進性と操向性とを得ようとしている。また、特許文献7に記載されている前後輪操舵装置においては、速度、ヨーレイトおよびロールレート等を検出し、検出結果に基づいて後輪を前輪の操舵方向と同相に操舵している。それにより、後輪操舵時の自動二輪車の振動を減衰している。
【特許文献1】特開昭61−160374号公報
【特許文献2】特許第2927477号公報
【特許文献3】特許第3206610号公報
【特許文献4】特許第2829009号公報
【特許文献5】特公平7−98507号公報
【特許文献6】特許第2938911号公報
【特許文献7】特許第3200771号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
ところで、上記特許文献6または7に記載されている装置においては、後輪の操舵角は前輪の操舵角に基づいて決定される。このような操舵方法においては、自動二輪車が不安定な状態で旋回しようとすると、大きな操舵トルクおよびロール角が必要となる。そのため、自動二輪車の操作性が低下し、安定した旋回を行うことができない場合がある。
【0007】
本発明の目的は、走行安定性を向上させるとともに旋回性の低下を防止できる自動二輪車の制御システムおよびそれを備える自動二輪車を提供することである。
【課題を解決するための手段】
【0008】
(1)第1の発明に係る制御システムは、自動二輪車の姿勢を制御する制御システムであって、前輪を回転可能かつ操舵可能に保持する保持部材と、保持部材に設けられ、後輪を回転可能かつ揺動可能に支持する後輪支持機構と、自動二輪車のロールレートを検出するロールレート検出手段と、後輪を揺動させる揺動手段と、ロールレート検出手段によって検出されたロールレートに基づいて揺動手段により後輪を揺動させる制御手段とを備えたものである。
【0009】
本発明に係る制御システムにおいては、後輪支持機構によって後輪が回転可能かつ揺動可能に保持される。ロールレート検出手段によって検出された自動二輪車のロールレートに基づいて、制御手段が揺動手段により後輪を揺動させる。
【0010】
このように、自動二輪車のロールレートに基づいて後輪を揺動させることにより、前輪の横力と後輪の横力との比率を調整し、自動二輪車のロールレートを低減することができる。それにより、自動二輪車の走行安定性が向上するとともに、旋回性の低下を防止することができる。
【0011】
(2)後輪支持機構は、後輪を保持部材の上下方向に平行な軸に対して傾斜可能に支持し、制御手段は、ロールレート検出手段によって検出されたロールレートに基づいて後輪を保持部材の上下方向に平行な軸に対して傾斜させてもよい。
【0012】
この場合、制御手段は、ロールレート検出手段によって検出された自動二輪車のロールレートに基づいて、後輪を保持部材の上下方向に平行な軸に対して傾斜させる。それにより、前輪の横力と後輪の横力との比率を調整し、自動二輪車のロールレートを低減することができる。その結果、自動二輪車の走行安定性が向上するとともに、旋回性の低下を防止することができる。
【0013】
(3)後輪支持機構は、後輪を保持部材の前後方向に平行な軸に対して傾斜可能に支持し、制御手段は、ロールレート検出手段によって検出されたロールレートに基づいて後輪を保持部材の前後方向に平行な軸に対して傾斜させてもよい。
【0014】
この場合、制御手段は、ロールレート検出手段によって検出された自動二輪車のロールレートに基づいて、後輪を保持部材の前後方向に平行な軸に対して傾斜させる。それにより、前輪の横力と後輪の横力との比率を調整し、自動二輪車のロールレートを低減することができる。その結果、自動二輪車の走行安定性が向上するとともに、旋回性の低下を防止することができる。
【0015】
(4)制御システムは、自動二輪車の車速を検出する速度検出手段をさらに備え、制御装置は、ロールレート検出手段によって検出されたロールレートと係数との積に基づいて後輪の傾斜角度を決定し、係数は、速度検出手段によって検出された車速に基づいて決定されてもよい。
【0016】
この場合、自動二輪車のロールレートおよび車速に応じて後輪の傾斜角度を決定することができる。それにより、自動二輪車のロールレートを確実に低減することができる。その結果、自動二輪車の走行安定性が確実に向上するとともに、旋回性の低下を確実に防止することができる。
【0017】
(5)制御装置は、速度検出手段によって検出された車速に基づいて決定される応答速度で後輪を傾斜させてもよい。
【0018】
この場合、車速に応じた応答速度で後輪が傾斜されるので、二輪車特有の不安定現象を確実に防止することができる。それにより、自動二輪車の走行安定性が確実に向上するとともに、旋回性の低下を確実に防止することができる。
【0019】
(6)制御装置は、1次遅れ要素で後輪を傾斜させ、1次遅れ要素の時定数は、速度検出手段によって検出された車速に基づいて決定されてもよい。
【0020】
この場合、自動二輪車の車速に応じた時定数の1次遅れ要素で後輪が傾斜されるので、二輪車特有の不安定現象をより確実に防止することができる。それにより、自動二輪車の走行安定性がより確実に向上するとともに、旋回性の低下をより確実に防止することができる。
【0021】
(7)第2の発明に係る制御システムは、自動二輪車の姿勢を制御する制御システムであって、前輪を回転可能かつ操舵可能に保持する第1の保持部材と、第1の保持部材に揺動可能に取り付けられるとともに後輪を保持する第2の保持部材と、自動二輪車のロールレートを検出するロールレート検出手段と、第1の保持部材および第2の保持部材の一方を他方に対して揺動させる揺動手段と、ロールレート検出手段によって検出されたロールレートに基づいて揺動手段により第1の保持部材および第2の保持部材の一方を他方に対して揺動させる制御手段とを備えたものである。
【0022】
本発明に係る制御システムにおいては、前輪を保持する第1の保持部材と後輪を保持する第2の保持部材とが互いに揺動可能に取り付けられている。ロールレート検出手段によって検出された自動二輪車のロールレートに基づいて、制御手段が揺動手段により第1の保持部材および第2の保持部材の一方を他方に対して揺動させる。
【0023】
このように、自動二輪車のロールレートに基づいて第1の保持部材および第2の保持部材の一方を他方に対して揺動させることにより、前輪の横力と後輪の横力との比率を調整し、自動二輪車のロールレートを低減することができる。それにより、自動二輪車の走行安定性が向上するとともに、旋回性の低下を防止することができる。
【0024】
(8)第1の保持部材と第2の保持部材とは前後方向に延びる軸周りに回動可能に取り付けられており、前後方向に延びる軸の延長線は後輪と地面との略接点を通過し、制御手段は、ロールレート検出手段によって検出されたロールレートに基づいて第1の保持部材および第2の保持部材の一方を他方に対して相対的に回動させてもよい。
【0025】
この場合、制御手段は、ロールレート検出手段によって検出された自動二輪車のロールレートに基づいて、第1の保持部材および第2の保持部材の一方を他方に対して前後方向に延びる軸周りで相対的に回動させる。それにより、前輪の横力と後輪の横力との比率を調整し、自動二輪車のロールレートを低減することができる。その結果、自動二輪車の走行安定性が向上するとともに、旋回性の低下を防止することができる。
【0026】
また、上記前後方向に延びる軸の延長線が後輪と地面との略接点を通過するように第1の保持部材および第2の保持部材が取り付けられている。そのため、第1の保持部材に対して第2の保持部材を回動させる場合、後輪は地面との接点近傍を中心に回動する。それにより、後輪が地面に対して滑ることを防止することができ、安全性が向上する。
【0027】
(9)制御システムは、自動二輪車の車速を検出する速度検出手段をさらに備え、制御装置は、ロールレート検出手段によって検出されたロールレートと係数との積に基づいて第1の保持部材に対する第2の保持部材の相対的な回動角度を決定し、係数は、速度検出手段によって検出された車速に基づいて決定されてもよい。
【0028】
この場合、自動二輪車のロールレートおよび車速に応じて第1の保持部材に対する第2の保持部材の相対的な回動角度を決定することができる。それにより、自動二輪車のロールレートを確実に低減することができる。その結果、自動二輪車の走行安定性が確実に向上するとともに、旋回性の低下を確実に防止することができる。
【0029】
(10)制御装置は、速度検出手段によって検出された車速に基づいて決定される応答速度で第1の保持部材および第2の保持部材の一方を他方に対して相対的に回動させてもよい。
【0030】
この場合、車速に応じた応答速度で第1の保持部材および第2の保持部材の一方が他方に対して相対的に回動されるので、二輪車特有の不安定現象を確実に防止することができる。それにより、自動二輪車の走行安定性が確実に向上するとともに、旋回性の低下を確実に防止することができる。
【0031】
(11)制御装置は、1次遅れ要素で第1の保持部材および第2の保持部材の一方を他方に対して相対的に回動させ、1次遅れ要素の時定数は、速度検出手段によって検出された車速に基づいて決定されてもよい。
【0032】
この場合、自動二輪車の車速に応じた時定数の1次遅れ要素で第1の保持部材および第2の保持部材の一方が他方に対して相対的に回動されるので、二輪車特有の不安定現象をより確実に防止することができる。それにより、自動二輪車の走行安定性がより確実に向上するとともに、旋回性の低下をより確実に防止することができる。
【0033】
(12)第3の発明に係る自動二輪車は、第1または第2の発明に係る制御システムと、後輪を回転させるための駆動力を発生する駆動手段と、駆動手段により発生された駆動力を後輪へ伝達するための駆動力伝達手段とを備えたものである。
【0034】
本発明に係る自動二輪車においては、駆動手段によって発生された駆動力が駆動力伝達手段によって後輪へ伝達され、後輪が駆動される。また、第1または第2の発明に係る制御システムにより自動二輪車の姿勢が制御される。
【0035】
この場合、第1または第2の発明に係る制御システムにより、前輪の横力と後輪の横力との比率が調整されるので、自動二輪車のロールレートを低減することができる。それにより、自動二輪車の走行安定性が向上するとともに、旋回性の低下を防止することができる。
【発明の効果】
【0036】
本発明によれば、前輪の横力と後輪の横力との比率が調整されるので、自動二輪車のロールレートを低減することができる。それにより、自動二輪車の走行安定性が向上するとともに、旋回性の低下を防止することができる。
【発明を実施するための最良の形態】
【0037】
以下、本発明の実施の形態に係るシステムおよびそれを備える自動二輪車について図面を参照しながら説明する。
【0038】
(第1の実施の形態)
図1は、本発明の第1の実施の形態に係る自動二輪車の外観側面図である。
【0039】
この自動二輪車100においては、前輪1がフロントフォーク2により回転可能に保持されている。フロントフォーク2は、ヘッドパイプ5に左右方向へ揺動可能に設けられている。フロントフォーク2の上端部にはハンドル3が取り付けられている。
【0040】
乗り手がハンドル3を操作することにより、フロントフォーク2が自動二輪車100の左右方向に揺動する。それにより、前輪1の操舵が行われる。
【0041】
ヘッドパイプ5の後部に本体フレーム6が設けられている。本体フレーム6の中央部にはエンジン7が保持されている。エンジン7の上部には燃料タンク8が設けられ、燃料タンク8の後方には前部シート9aおよび後部シート9bが設けられている。
【0042】
エンジン7の後方に延びるように本体フレーム6にリヤアーム52(図2および図3参照)が接続されている。リヤアーム52は、後輪4およびチェーンスプロケット54を回転可能に保持する。
【0043】
フロントフォーク2の下端部近傍には車速センサ11が設けられている。また、後部シート9bの下方にはロールレートセンサ14が設けられている。
【0044】
リヤアーム52の後輪4側には後輪舵角センサ17が設けられている。さらに、前部シート9aの下方には操舵量演算装置15aおよび操舵角制御装置15bが設けられ、リヤアーム52の後輪4側にはアクチュエータ16が設けられている。車速センサ11、ロールレートセンサ14、操舵量演算装置15a、操舵角制御装置15b、アクチュエータ16および後輪舵角センサ17の詳細は後述する。
【0045】
図2は図1の自動二輪車100におけるA−A矢視断面図であり、図3は図1の自動二輪車100におけるB−B矢視断面図である。図2および図3においては、矢印で示すように、自動二輪車100の左右方向をX方向と定義し、自動二輪車100の前後方向をY方向と定義し、自動二輪車100の上下方向をZ方向と定義する。
【0046】
図2に示すように、本体フレーム6には回転連結軸53cを介してY方向に延びるリヤアーム52の一端が接続されている。これにより、リヤアーム52が上下に揺動可能となっている。
【0047】
リヤアーム52は、本体フレーム6との接続部周辺において、X方向に幅広に形成された幅広部52dを有する。幅広部52dからX方向に偏った位置からY方向へ延びるように、幅広部52dよりも幅の狭い幅狭部52cが形成されている。
【0048】
幅狭部52cの中央および端部からX方向へ2つの支持部52a,52bが互いに平行に延びている。
【0049】
支持部52a,52b間の幅狭部52cには、X方向に延びる駆動軸保持孔52hが形成されている。駆動軸保持孔52hには駆動軸51が挿入されている。これにより、駆動軸51はリヤアーム52に回転可能に保持されている。駆動軸51の一端は等速型自在継手51jに連結されている。
【0050】
図2および図3では、等速型自在継手51jが簡易的に示されているが、等速型自在継手51jは、駆動軸51の一端を保持するインナーレース、インナーレースを覆うように形成されたアウターレース、インナーレースおよびアウターレース間に取り付けられる複数のボールおよびブーツ等により構成されている。
【0051】
等速型自在継手51jは、支持部52a,52b間に位置し、後述の後輪回転軸43に接続されている。駆動軸51の他端には、チェーンスプロケット54が接続されている。チェーンスプロケット54にチェーン55が架けられている。
【0052】
支持部52a,52bのそれぞれの先端部近傍には、回転連結軸53a,53bを介して車軸支持部材45の連結部45a,45bが取り付けられている。これにより、車軸支持部材45はリヤアーム52の支持部52a,52bに対して、回転連結軸53a,53bを中心として図3の矢印Pに示すように揺動可能である。
【0053】
車軸支持部材45の連結部45a,45bは、それぞれXY平面においてL字状に形成され、互いに対向するように設けられている。また、車軸支持部材45には、連結部45a,45bからX方向に延びる筒状部45cが形成されている。
【0054】
筒状部45cの内側にはベアリング44を介して後輪回転軸43が回転可能に保持されている。後輪回転軸43の一端は等速型自在継手51jに接続されている。また、後輪回転軸43の他端は後輪ハブ42に接続されている。なお、後輪回転軸43の一端が等速型自在継手51jのアウターレースと一体形成されてもよい。
【0055】
後輪ハブ42はZY平面において略円形状を有する(図示せず)。後輪ハブ42には後輪ホイール41が接続されている。後輪ホイール41の外周部には後輪4、すなわち後輪タイヤが装着されている。
【0056】
図1のエンジン7の駆動力がチェーン55を介してチェーンスプロケット54に伝達され、チェーンスプロケット54が回転する。チェーンスプロケット54の回転とともに駆動軸51が図2の矢印Kに示すように回転する。それにより、後輪回転軸43が回転し、後輪ハブ42、後輪ホイール41および後輪4が回転する。
【0057】
本実施の形態においては、駆動軸51および後輪回転軸43が等速型自在継手51jを介して接続されることにより、駆動軸51の軸心と後輪回転軸43の軸心とがずれた場合でも、等速ジョイント51の回転力が後輪回転軸43に伝達される。
【0058】
リヤアーム52の幅狭部52c上にはアクチュエータ16が設けられている。また、車軸支持部材45の筒状部45cの上部には、Z方向に対して傾斜して延びるようにナックルアーム46が一体形成されている。
【0059】
アクチュエータ16は、例えばサーボモータを備える。本例では、図2および図3に示すように、アクチュエータ16の略中央部からY方向に延びるようにサーボモータの回転軸161が突出している。
【0060】
回転軸161には回動アーム162の一端が連結されている。回動アーム162の他端にはタイロッド164の一端が揺動可能に連結されている。タイロッド164の他端はナックルアーム46の上端に揺動可能に連結されている。
【0061】
アクチュエータ16が動作することにより回転軸161が回転する。これにより、回動アーム162の他端が回転軸161を中心に矢印Qの方向に揺動する。それにより、タイロッド164を介してナックルアーム46の上端部がX方向に移動する。その結果、上述のように、車軸支持部材45が回転連結軸53a,53bを中心として矢印Pで示すように揺動する。
【0062】
このように、アクチュエータ16が動作することにより後輪4がXZ面内でZ方向に対して傾斜する。以下の説明において、Z方向を基準とした後輪4の傾斜角度を後輪舵角θ1と呼ぶ。アクチュエータ16は操舵角制御装置15bにより制御される。
【0063】
ここで、本発明者らは、種々の実験等により、低速走行時のふらつき、高速走行時に発生する不快な振動、および強風または地面の凹凸等の外的な影響による挙動の乱れ等の二輪車特有の不安定現象は、二輪車のロールレートを低減させることにより防止することが可能であることを見出した。また、本発明者らは、二輪車の速度によって上記の不安定現象の周波数およびその減衰率が決まっていることにも着目した。
【0064】
そこで、本実施の形態においては、自動二輪車100の速度に応じて比例定数を決定し、その比例定数を自動二輪車100のロールレートに乗算することにより後輪4の目標操舵角を決定する。この目標操舵角で後輪4を操舵することにより、前輪1の横力と後輪4の横力との比率を調整する。それにより、自動二輪車100のロールレートを低減させる。その結果、上記の不安定現象を防止することができる。なお、比例定数は、前輪1の横力と後輪4の横力との比率が自動二輪車100のロールレートを低減させるために最適な値になるように決定される。
【0065】
また、上記の不安定現象の周波数およびその減衰率を考慮して、自動二輪車100の速度に基づいて応答速度を決定し、その応答速度で後輪4が目標操舵角になるように後輪4を操舵する。これにより、上記の不安定現象をより確実に防止することが可能となる。詳細は後述する。
【0066】
以下に、本実施の形態に係る自動二輪車100の制御システムおよびその制御方法について説明する。
【0067】
図4は、本実施の形態に係る自動二輪車100の制御システム10の一例を示すブロック図である。
【0068】
図4に示すように、自動二輪車100の制御システム10は、車速センサ11、ロールレートセンサ14、操舵量演算装置15a、操舵角制御装置15b、アクチュエータ16および後輪舵角センサ17を備える。
【0069】
ここで、制御システム10にはバッテリー20から電力が供給される。車速センサ11は前輪1の回転数に基づいて自動二輪車100の速度を検出する。ロールレートセンサ14は、自動二輪車100のロールレート、すなわちローリングの方向における自動二輪車100の角速度を検出する。後輪舵角センサ17は後輪舵角θ1を検出する。
【0070】
操舵量演算装置15aおよび操舵角制御装置15bは、例えば、CPU(中央演算処理装置)および記憶装置またはマイクロコンピュータにより構成される。操舵量演算装置15aには、車速センサ11およびロールレートセンサ14の検出値が入力される。操舵量演算装置15aは入力された各検出値に基づいて後輪4の目標操舵角を算出する。操舵角制御装置15bは、操舵量演算装置15aによって算出された目標操舵角に基づいてアクチュエータ16の動作を制御する。
【0071】
操舵角制御装置15bがアクチュエータ16の動作を制御することにより、後輪4の後輪舵角θ1が調整される。調整された後輪舵角θ1は後輪舵角センサ17により検出され、検出された後輪舵角θ1は操舵角制御装置15bに入力される。このように、後輪舵角θ1に基づいてアクチュエータ16がフィードバック制御される。
【0072】
図5は、本実施の形態に係る自動二輪車100の制御システム10による制御方法の一例を示すフローチャートである。
【0073】
図5に示すように、まず、制御システム10(図4参照)の操舵量演算装置15aは、車速センサ11から自動二輪車100の速度を取得する(ステップS1)。次に、操舵量演算装置15aは、ステップS1において取得した自動二輪車100の速度に基づいて、比例定数および時定数を決定する(ステップS2)。なお、比例定数および時定数は車速に応じて変化する。比例定数と車速との関係は操舵量演算装置15aに記憶されている。
【0074】
次に、操舵量演算装置15aは、ロールレートセンサ11からロールレートγを取得する(ステップS3)。次いで、操舵量演算装置15aは、下記式(1)および下記式(2)により後輪4の目標操舵角δ1および遅れ操舵角δ2を算出する(ステップS4)。
【0075】
δ1=K・γ・・・・・・(1)
δ2=δ1/(Ts+1)・・・・・(2)
なお、上式(1)において、KはステップS2において決定された比例定数である。また、上式(2)において、TはステップS2において決定された時定数であり、sはラプラス演算子である。
【0076】
次に、操舵量演算装置15aは、上式(2)によって決定される後輪4の遅れ操舵角δ2を操舵角制御装置15bに与え、操舵角制御装置15bは与えられた遅れ操舵角δ2に基づいてアクチュエータ16を制御することにより後輪4を操舵する(ステップS5)。つまり、本実施の形態においては、比例定数Kに応じて後輪4の目標操舵角δ1(=K・γ)が決定され、時定数Tの一次遅れ要素で後輪4が遅れ操舵角δ2になるように後輪4が操舵される。
【0077】
次に、操舵角制御装置15bは、後輪舵角センサ17から後輪舵角θ1を取得する(ステップS6)。次いで、操舵角制御装置15bは、ステップS6で取得した後輪舵角θ1が遅れ操舵角δ2に達したか否かを判別する(ステップS7)。後輪舵角θ1が遅れ操舵角δ2に達している場合、操舵量演算装置15aは、ステップS1に戻る。
【0078】
ステップS7において後輪舵角θ1が遅れ操舵角δ2に達していない場合、操舵角制御装置15bは、後輪舵角θ1が遅れ操舵角δ2に達するまでステップS5からステップS7の処理を繰り返す。
【0079】
なお、ステップS2において決定される比例定数Kおよび時定数Tは、例えば、図6および図7に示すような値になる。図6において、縦軸は比例定数Kを示し、横軸は車速を示す。また、図7において、縦軸は時定数Tを示し、横軸は車速を示す。時定数Tおよび比例定数Kは、上述した不安定現象を防止することができるように、自動二輪車100の構造等を考慮して、種々の実験および解析等により、車速に応じて適宜決定される。
【0080】
なお、例えば、図3の矢印P1で示す方向のロールレートを正の値とすると、目標操舵角δ1は、Z方向を基準として矢印P1と同じ方向に傾斜させる場合には正の値となり、矢印P1と逆方向に傾斜させる場合には負の値となる。例えば、車速が30km/hのときに検出されたロールレートγが正の値である場合、図6の例では、車速が30km/hのときの比例定数Kは負の値であるので、目標舵角δ1は負の値になる。したがって、後輪4は矢印P1と逆方向に傾斜するように制御される。一方、車速が30km/hのときに検出されたロールレートγが負の値である場合、目標操舵角δ1は正の値になり、後輪4は矢印P1と同じ方向に傾斜するように制御される。
【0081】
また、図7の例では、中低速において時定数Tの値が上昇している。この例では、自動二輪車100が中低速で走行している場合には、後輪4がある程度の時間をかけて操舵される。また、自動二輪車100が高速で走行している場合には、後輪4が短時間で操舵される。このように、車速に応じて時定数Tを決定することにより、常に安定した走行が可能になる。
【0082】
以上のように、本実施の形態においては、自動二輪車100のロールレートγおよび車速を検出し、検出されたロールレートγ、および車速に応じて決定される比例定数Kに基づいて後輪4の舵角を制御している。それにより、前輪1の横力と後輪4の横力との比率を調整し、自動二輪車100のロールレートを低減している。その結果、走行安定性が向上するとともに、旋回性の低下を防止することができる。
【0083】
また、二輪車特有の不安定現象の周波数およびその減衰率を考慮して時定数Tを決定し、その時定数Tの一次遅れ要素で後輪4の舵角を制御している。つまり、自動二輪車100の速度に応じた応答速度で後輪4を操舵している。それにより、走行安定性が確実に向上するとともに、旋回性の低下を確実に防止することができる。
【0084】
また、車速およびロールレートγのみに基づいて目標操舵角δ1および遅れ操舵角δ2を決定することができるので、後輪4の制御が容易になる。
【0085】
(第2の実施の形態)
第2の実施の形態に係る自動二輪車が第1の実施の形態に係る自動二輪車100と異なるのは以下の点である。なお、第2の実施の形態に係る自動二輪車の外観側面図は第1の実施の形態に係る自動二輪車100と同じであるので、図1を参照しながら説明する。
【0086】
図8は、図1のB−B矢視断面図である。図8に示すように、第2の実施の形態においては、本体フレーム6には回転連結軸53cを介してY方向に延びるリヤアーム52の一端が接続されている。これにより、リヤアーム52が上下に揺動可能となっている。
【0087】
リヤアーム52は、本体フレーム6との接続部周辺において、X方向に幅広に形成された幅広部52dを有する。幅広部52dからX方向に偏った位置からY方向へ延びるように、幅広部52dよりも幅の狭い幅狭部52cが形成されている。
【0088】
幅狭部52cの端部には、XZ平面において図2の支持部52a,52bと同様の構造を有する支持部82a,82bが形成されている。
【0089】
支持部82a,82b間には、図2と同様の構成で、車軸支持部材45および等速型自在継手51jが取り付けられている。また、車軸支持部材45には、図2と同様の構成で後輪回転軸43、後輪ハブ42、後輪ホイール41および後輪4が取り付けられている。
【0090】
リヤアーム52の幅狭部52c内にはアクチュエータ16が設けられている。また、車軸支持部材45の筒状部45cのY方向の一端部には、Y方向に対して傾斜して延びるようにナックルアーム46が一体形成されている。
【0091】
アクチュエータ16の回転軸161には回動アーム162の一端が連結されている。回動アーム162の他端にはタイロッド164の一端が揺動可能に連結されている。
【0092】
アクチュエータ16が動作することにより回転軸161が回転する。これにより、回動アーム162の他端が回転軸161を中心に矢印Rの方向に揺動する。それにより、タイロッド164を介してナックルアーム46のタイロッド164との連結部がX方向に移動する。その結果、車軸支持部材45が回転連結軸53a,53bを中心として矢印Sで示すように揺動する。
【0093】
このように、アクチュエータ16が動作することにより後輪4がXY平面でY方向に対して傾斜する。本実施の形態においては、Y方向を基準とした後輪4の傾斜角度を後輪舵角θ1とする。なお、XY平面では、後輪4はZ方向に対して揺動しないように固定されている。
【0094】
上記のような構成により、上述した(1)式および(2)式を用いて図5で説明した制御方法と同様に後輪舵角θ1が制御される。なお、比例定数Kおよび時定数Tは、上述したように、二輪車構造等を考慮して、種々の実験および解析等により、車速に応じて適宜決定される。
【0095】
以上のように、本実施の形態においても、自動二輪車のロールレートγおよび車速を検出し、検出されたロールレートγ、および車速に応じて決定される比例定数Kに基づいて後輪4の舵角を制御している。それにより、前輪1の横力と後輪4の横力との比率を調整し、自動二輪車のロールレートを低減している。その結果、走行安定性が向上するとともに、旋回性の低下を防止することができる。
【0096】
また、二輪車特有の不安定現象の周波数およびその減衰率を考慮して時定数Tを決定し、その時定数Tの一次遅れ要素で後輪4の舵角を制御している。つまり、自動二輪車の速度に応じた応答速度で後輪4を操舵している。それにより、走行安定性が確実に向上するとともに、旋回性の低下を確実に防止することができる。
【0097】
(第3の実施の形態)
第3の実施の形態に係る自動二輪車が第1および第2の実施の形態に係る自動二輪車と異なるのは以下の点である。
【0098】
図9は、本発明の第3の実施の形態に係る自動二輪車の外観側面図である。なお、第3の実施の形態においては、後輪4は操舵されず、揺動しないように固定されている。
【0099】
図9に示すように、第3の実施の形態に係る自動二輪車300においては、前部シート9aの下方に、傾斜量演算装置35aおよび傾斜角制御装置35bが設けられ、本体フレーム6に傾斜角センサ37が設けられている。
【0100】
また、ヘッドパイプ5と本体フレーム6とは、回動可能に連結されている。以下、ヘッドパイプ5と本体フレーム6との連結部の構造について説明する。
【0101】
図10は、ヘッドパイプ5と本体フレーム6との連結部の概略縦断面図であり、図11は、ヘッドパイプ5と本体フレーム6との連結部の概略上面図であり、図12は、ヘッドパイプ5と本体フレーム6との連結部の概略背面図である。なお、図10〜図12においても、図2と同様に自動二輪車の左右方向をX方向と定義し、自動二輪車の前後方向をY方向と定義し、自動二輪車の上下方向をZ方向と定義する。
【0102】
図10に示すように、ヘッドパイプ5の後部には円柱形状の軸部5aが形成されている。本体フレーム6の前部の中央部には、軸挿入孔6aが形成されている。この軸挿入孔6aに、軸部5aが挿入される。
【0103】
軸挿入孔6aの内周面と軸部5aとの間には、円錐ころ軸受(テーパーローラ軸受)40が設けられている。これにより、ヘッドパイプ5は、軸部5aの前後方向に延びる軸心L1を中心として本体フレーム6に対して回動可能となる。なお、円錐ころ軸受40は、その中心軸が軸心L1と実質的に同一になるように設けられる。また、軸心L1の延長線は、図9に示すように、後方斜め下方向に延びるとともに、後輪4と地面Gとの接点近傍を通過するように形成されている。
【0104】
ヘッドパイプ5の軸部5aの後端部には、断面矩形状(図12参照)の突出部5bが形成されている。この突出部5bには、駆動伝達機能を有する回動部材30がボルト81により固定されている。図12に示すように、回動部材30の一端部には、軸部5aの突出部5bに係合する断面矩形状の係合孔を有する係合部30aが形成され、他端部には、断面円形の係合孔を有する係合部30bが形成されている。
【0105】
図10および図12に示すように、本体フレーム6には、回動部材30を両側方から挟み込むように、板ばね31が支持部材32を介して取り付けられている。板ばね31は、回動部材30の左側方に当接するばね部31aと、回動部材30の右側方に当接するばね部31bとを有している。
【0106】
本体フレーム6には、板ばね31のばね部31aおよび31bに当接するとともに、回動部材30の矢印A方向および矢印B方向の回動角度を制限する一対の位置規制部材33a,33bが互いに対向するように取り付けられている。この位置規制部材33a,33bは、回動部材30の回動方向(矢印A,Bで示す方向)における中立位置が保持されるように取り付けられている。すなわち、回動部材30が矢印A方向または矢印B方向に回動して中立位置に位置していない場合には、ばね部31aまたはばね部31bにより回動部材30を中立位置に戻そうとする抗力が働く。
【0107】
図10および図11に示すように、本体フレーム6の上部には、シリンダブラケット70a(図11参照)を介して、ヘッドパイプ5を本体フレーム6に対して回動させるための油圧シリンダ(アクチュエータ)70が取り付けられている。図11および図12に示すように、油圧シリンダ70は、チューブ71、チューブ71の内部に設けられるピストン72(図12)、ピストン72に固定されるピストンロッド73およびピストンロッド73の一端部に取り付けられる連結部材74を含む。
【0108】
チューブ71は、シリンダブラケット70aに固定されている。また、図12に示すように、チューブ71の内部はピストン72により2つの領域R1,R2に分割されており、各領域R1,R2にはオイルが充填されている。
【0109】
油圧シリンダ70の上方には、ポンプ部50が設けられている。油圧シリンダ70の領域R1,R2とポンプ部50とは、油圧パイプ60a,60bにより接続されている。油圧シリンダ70へのオイルの供給は、油圧パイプ60a,60bを介してポンプ部50により行なわれる。ピストンロッド73は、チューブ71を貫通するように設けられている。
【0110】
図11に示すように、連結部材74は、ボルト62により回動部材30の係合部30bに連結されている。本実施の形態においては、チューブ71は本体フレーム6に接続され、ピストン72およびピストンロッド73は回動部材30を介してヘッドパイプ5に接続される。
【0111】
このような構成により、油圧シリンダ70のピストン72の直線運動が回動部材30の回転運動に変換されてヘッドパイプ5の軸部5aに伝達され、ヘッドパイプ5を本体フレーム6に対して軸心L1(図10参照)を中心に回動させることができる。したがって、シリンダ70へのオイルの供給量を制御することにより、ヘッドパイプ5を回動させることができる。
【0112】
次に、本実施の形態に係る自動二輪車300の制御システムおよびその制御方法について説明する。
【0113】
図13は、本実施の形態に係る自動二輪車300の制御システム10Aの一例を示すブロック図である。
【0114】
図13に示すように、自動二輪車300の制御システム10Aは、車速センサ11、ロールレートセンサ14、傾斜量演算装置35aおよび傾斜角制御装置35b、傾斜角センサ37およびポンプ部50を備える。また、制御システム10Aにはバッテリー20から電力が供給される。
【0115】
傾斜角センサ37は、回動部材30の中立位置からの傾斜角度を検出することにより、ヘッドパイプ5の本体フレーム6に対する左右方向への相対的な傾斜角度θ2を検出する。
【0116】
傾斜量演算装置35aおよび傾斜角制御装置35bは、例えば、CPU(中央演算処理装置)および記憶装置またはマイクロコンピュータにより構成される。傾斜量演算装置35aには、車速センサ11およびロールレートセンサ14の検出値が入力される。傾斜量演算装置35aは入力された各検出値に基づいてヘッドパイプ5の目標傾斜角を算出する。傾斜角制御装置35bは、傾斜量演算装置35によって算出された目標傾斜角に基づいてポンプ部50の動作を制御する。
【0117】
傾斜角制御装置35bがポンプ部50(油圧シリンダ70)の動作を制御することにより、ヘッドパイプ5の傾斜角度θ2が調整される。調整された傾斜角度θ2は傾斜角センサ37により検出され、検出された傾斜角度θ2は傾斜角制御装置35bに入力される。このように、傾斜角度θ2に基づいてポンプ部50(油圧シリンダ70)がフィードバック制御される。
【0118】
図14は、本実施の形態に係る自動二輪車300の制御システム10Aによる制御方法の一例を示すフローチャートである。
【0119】
図14に示すように、まず、制御システム10A(図13参照)の傾斜量演算装置35aは、車速センサ11から自動二輪車300の速度を取得する(ステップS11)。次に、傾斜量演算装置35aは、ステップS11において取得した自動二輪車300の速度に基づいて、比例定数および時定数を決定する(ステップS12)。
【0120】
次に、傾斜量操舵装置35aは、ロールレートセンサ11からロールレートγを取得する(ステップS13)。次いで、傾斜量演算装置35aは、上述した式(1)および式(2)によりヘッドパイプ5の目標傾斜角δ1および遅れ傾斜角δ2を算出する(ステップS14)。
【0121】
次に、傾斜量操舵装置35aは、上述した式(2)によって決定されるヘッドパイプ5の遅れ傾斜角δ2を傾斜角制御装置35bに与え、傾斜角制御装置35bは与えられた遅れ傾斜角δ2に基づいてポンプ部50(油圧シリンダ70)を制御し、ヘッドパイプ5を回動させる(ステップS15)。
【0122】
次に、傾斜角制御装置35bは、傾斜角センサ37からヘッドパイプ5の傾斜角度θ2を取得する(ステップS16)。次いで、傾斜角制御装置35bは、ステップS16で取得した傾斜角度θ2が遅れ傾斜角δ2に達したか否かを判別する(ステップS17)。傾斜角度θ2が遅れ傾斜角δ2に達している場合、傾斜量演算装置35aは、ステップS11に戻る。
【0123】
ステップS17において傾斜角度θ2が遅れ傾斜角δ2に達していない場合、傾斜角制御装置35bは、傾斜角度θ2が遅れ傾斜角δ2に達するまでステップS15からステップS17の処理を繰り返す。
【0124】
なお、比例定数Kおよび時定数Tは、第1および第2の実施の形態において説明したように、自動二輪車300の構造等を考慮して、種々の実験および解析等により、車速に応じて適宜決定される。すなわち、比例定数Kおよび時定数Tは、第1、第2および第3の実施の形態においてそれぞれ異なる。
【0125】
以上のように、本実施の形態においては、自動二輪車300のロールレートγおよび車速を検出し、検出されたロールレートγ、および車速に応じて決定される比例定数Kに基づいてヘッドパイプ5の傾斜角度θ2を制御している。それにより、前輪1の横力と後輪4の横力との比率を調整し、自動二輪車300のロールレートを低減している。その結果、走行安定性が向上するとともに、旋回性の低下を防止することができる。
【0126】
また、二輪車特有の不安定現象の周波数およびその減衰率を考慮して時定数Tを決定し、その時定数Tの一次遅れ要素でヘッドパイプ5の傾斜角度を制御している。つまり、自動二輪車100の速度に応じた応答速度でヘッドパイプ5を傾斜させている。それにより、走行安定性が確実に向上するとともに、旋回性の低下を確実に防止することができる。
【0127】
また、軸心L1の延長線が後輪4と地面Gとの略接点を通過するようにヘッドパイプ5および本体フレーム6が取り付けられている。そのため、ヘッドパイプ5に対して本体フレーム6を回動させる場合、後輪4は地面Gとの接点近傍を中心に回動する。それにより、後輪4が地面Gに対して滑ることを防止することができ、安全性が向上する。
【0128】
また、車速およびロールレートγのみに基づいて目標傾斜角δ1および遅れ傾斜角δ2を決定することができるので、制御が容易である。
【0129】
(他の実施の形態)
上記第1〜第3の実施の形態においては、1次遅れ要素によって後輪舵角θ1または傾斜角度θ2を制御しているが、1次進み要素またはウォッシュアウトフィルタ等によって後輪舵角θ1または傾斜角度θ2を制御してもよい。
【0130】
また、第3の実施の形態においては、ヘッドパイプ5を回動させることにより本体フレーム6に対するヘッドパイプ5の傾斜角度を制御しているが、本体フレーム6を回動させることにより、ヘッドパイプ5に対する本体フレーム6の傾斜角度を制御してもよい。
【0131】
(請求項の各構成要素と実施の形態の各部との対応)
第1および第2の実施の形態においては、ヘッドパイプ5および本体フレーム6が保持部材に相当し、リヤアーム52、ベアリング44、車軸支持部材45、ナックルアーム46、タイロッド164が後輪支持機構に相当し、ロールレートセンサ14がロールレート検出手段に相当し、アクチュエータ16が揺動手段に相当し、操舵量演算装置15aおよび操舵角制御装置15bが制御手段に相当し、車速センサ11が速度検出手段に相当し、比例定数Kが係数に相当する。
【0132】
また、第3の実施の形態においては、ヘッドパイプ5が第1の保持部材に相当し、本体フレーム6が第2の保持部材に相当し、ロールレートセンサ14がロールレート検出手段に相当し、回動部材30、板ばね31、ポンプ部50および油圧シリンダ70が揺動手段に相当し、傾斜量演算装置35aおよび傾斜角制御装置35bが制御手段に相当し、軸心L1が前後方向に延びる軸に相当し、車速センサ11が速度検出手段に相当し、比例定数Kが係数に相当する。
【0133】
また、上記第1〜第3の実施の形態においては、エンジン7が駆動手段に相当し、チェーンスプロケット54およびチェーン55が駆動力伝達手段に相当する。
【産業上の利用可能性】
【0134】
本発明は、自動二輪車の制御システムとして有効に利用可能である。
【図面の簡単な説明】
【0135】
【図1】第1の実施の形態に係る自動二輪車の外観側面図である。
【図2】図1の自動二輪車におけるA−A矢視断面図である。
【図3】図1の自動二輪車におけるB−B矢視断面図である。
【図4】第1の実施の形態に係る自動二輪車の制御システムの一例を示すブロック図である。
【図5】第1の実施の形態に係る自動二輪車の制御システムによる制御方法の一例を示すフローチャートである。
【図6】比例定数の一例を示す図である。
【図7】時定数の一例を示す図である。
【図8】図1のB−B矢視断面図である。
【図9】第3の実施の形態に係る自動二輪車の外観側面図である。
【図10】ヘッドパイプと本体フレームとの連結部の概略側面断面図である。
【図11】ヘッドパイプと本体フレームとの連結部の概略上面図である。
【図12】ヘッドパイプと本体フレームとの連結部の概略背面図である。
【図13】第3の実施の形態に係る自動二輪車の制御システムの一例を示すブロック図である。
【図14】第3の実施の形態に係る自動二輪車の制御システムによる制御方法の一例を示すフローチャートである。
【符号の説明】
【0136】
1 前輪
2 フロントフォーク
3 ハンドル
4 後輪
5 ヘッドパイプ
6 本体フレーム
7 エンジン
10,10A 制御システム
11 車速センサ
14 ロールレートセンサ
15a 操舵量演算装置
15b 操舵角制御装置
16 アクチュエータ
17 後輪舵角センサ
30 回動部材
31 板ばね
35a 傾斜量演算装置
35b 傾斜角制御装置
37 傾斜角センサ
43 後輪回転軸
44 ベアリング
45 車軸支持部材
46 ナックルアーム
50 ポンプ部
51 駆動軸
51j 等速型自在継手
52 リヤアーム
54 チェーンスプロケット
55 チェーン
70 油圧シリンダ
100,300 自動二輪車
164 タイロッド
【特許請求の範囲】
【請求項1】
自動二輪車の姿勢を制御する制御システムであって、
前輪を回転可能かつ操舵可能に保持する保持部材と、
前記保持部材に設けられ、後輪を回転可能かつ揺動可能に支持する後輪支持機構と、
前記自動二輪車のロールレートを検出するロールレート検出手段と、
前記後輪を揺動させる揺動手段と、
前記ロールレート検出手段によって検出されたロールレートに基づいて前記揺動手段により前記後輪を揺動させる制御手段とを備えたことを特徴とする制御システム。
【請求項2】
前記後輪支持機構は、前記後輪を前記保持部材の上下方向に平行な軸に対して傾斜可能に支持し、
前記制御手段は、前記ロールレート検出手段によって検出されたロールレートに基づいて前記後輪を前記保持部材の上下方向に平行な軸に対して傾斜させることを特徴とする請求項1記載の制御システム。
【請求項3】
前記後輪支持機構は、前記後輪を前記保持部材の前後方向に平行な軸に対して傾斜可能に支持し、
前記制御手段は、前記ロールレート検出手段によって検出されたロールレートに基づいて前記後輪を前記保持部材の前後方向に平行な軸に対して傾斜させることを特徴とする請求項1記載の制御システム。
【請求項4】
前記自動二輪車の車速を検出する速度検出手段をさらに備え、
前記制御装置は、前記ロールレート検出手段によって検出されたロールレートと係数との積に基づいて前記後輪の傾斜角度を決定し、
前記係数は、前記速度検出手段によって検出された車速に基づいて決定されることを特徴とする請求項1〜3のいずれかに記載の制御システム。
【請求項5】
前記制御装置は、前記速度検出手段によって検出された車速に基づいて決定される応答速度で前記後輪を傾斜させることを特徴とする請求項4記載の制御システム。
【請求項6】
前記制御装置は、1次遅れ要素で前記後輪を傾斜させ、
前記1次遅れ要素の時定数は、前記速度検出手段によって検出された車速に基づいて決定されることを特徴とする請求項4または5記載の制御システム。
【請求項7】
自動二輪車の姿勢を制御する制御システムであって、
前輪を回転可能かつ操舵可能に保持する第1の保持部材と、
前記第1の保持部材に揺動可能に取り付けられるとともに後輪を保持する第2の保持部材と、
前記自動二輪車のロールレートを検出するロールレート検出手段と、
前記第1の保持部材および前記第2の保持部材の一方を他方に対して揺動させる揺動手段と、
前記ロールレート検出手段によって検出されたロールレートに基づいて前記揺動手段により前記第1の保持部材および前記第2の保持部材の一方を他方に対して揺動させる制御手段とを備えたことを特徴とする制御システム。
【請求項8】
前記第1の保持部材と前記第2の保持部材とは前後方向に延びる軸周りに回動可能に取り付けられており、
前記前後方向に延びる軸の延長線は前記後輪と地面との略接点を通過し、
前記制御手段は、前記ロールレート検出手段によって検出されたロールレートに基づいて前記第1の保持部材および前記第2の保持部材の一方を他方に対して相対的に回動させることを特徴とする請求項7記載の制御システム。
【請求項9】
前記自動二輪車の車速を検出する速度検出手段をさらに備え、
前記制御装置は、前記ロールレート検出手段によって検出されたロールレートと係数との積に基づいて前記第1の保持部材に対する前記第2の保持部材の相対的な回動角度を決定し、
前記係数は、前記速度検出手段によって検出された車速に基づいて決定されることを特徴とする請求項8記載の制御システム。
【請求項10】
前記制御装置は、前記速度検出手段によって検出された車速に基づいて決定される応答速度で前記第1の保持部材および前記第2の保持部材の一方を他方に対して相対的に回動させることを特徴とする請求項9記載の制御システム。
【請求項11】
前記制御装置は、1次遅れ要素で前記第1の保持部材および前記第2の保持部材の一方を他方に対して相対的に回動させ、
前記1次遅れ要素の時定数は、前記速度検出手段によって検出された車速に基づいて決定されることを特徴とする請求項9または10記載の制御システム。
【請求項12】
請求項1〜11のいずれかに記載の制御システムと、
後輪を回転させるための駆動力を発生する駆動手段と、
前記駆動手段により発生された駆動力を前記後輪へ伝達するための駆動力伝達手段とを備えることを特徴とする自動二輪車。
【請求項1】
自動二輪車の姿勢を制御する制御システムであって、
前輪を回転可能かつ操舵可能に保持する保持部材と、
前記保持部材に設けられ、後輪を回転可能かつ揺動可能に支持する後輪支持機構と、
前記自動二輪車のロールレートを検出するロールレート検出手段と、
前記後輪を揺動させる揺動手段と、
前記ロールレート検出手段によって検出されたロールレートに基づいて前記揺動手段により前記後輪を揺動させる制御手段とを備えたことを特徴とする制御システム。
【請求項2】
前記後輪支持機構は、前記後輪を前記保持部材の上下方向に平行な軸に対して傾斜可能に支持し、
前記制御手段は、前記ロールレート検出手段によって検出されたロールレートに基づいて前記後輪を前記保持部材の上下方向に平行な軸に対して傾斜させることを特徴とする請求項1記載の制御システム。
【請求項3】
前記後輪支持機構は、前記後輪を前記保持部材の前後方向に平行な軸に対して傾斜可能に支持し、
前記制御手段は、前記ロールレート検出手段によって検出されたロールレートに基づいて前記後輪を前記保持部材の前後方向に平行な軸に対して傾斜させることを特徴とする請求項1記載の制御システム。
【請求項4】
前記自動二輪車の車速を検出する速度検出手段をさらに備え、
前記制御装置は、前記ロールレート検出手段によって検出されたロールレートと係数との積に基づいて前記後輪の傾斜角度を決定し、
前記係数は、前記速度検出手段によって検出された車速に基づいて決定されることを特徴とする請求項1〜3のいずれかに記載の制御システム。
【請求項5】
前記制御装置は、前記速度検出手段によって検出された車速に基づいて決定される応答速度で前記後輪を傾斜させることを特徴とする請求項4記載の制御システム。
【請求項6】
前記制御装置は、1次遅れ要素で前記後輪を傾斜させ、
前記1次遅れ要素の時定数は、前記速度検出手段によって検出された車速に基づいて決定されることを特徴とする請求項4または5記載の制御システム。
【請求項7】
自動二輪車の姿勢を制御する制御システムであって、
前輪を回転可能かつ操舵可能に保持する第1の保持部材と、
前記第1の保持部材に揺動可能に取り付けられるとともに後輪を保持する第2の保持部材と、
前記自動二輪車のロールレートを検出するロールレート検出手段と、
前記第1の保持部材および前記第2の保持部材の一方を他方に対して揺動させる揺動手段と、
前記ロールレート検出手段によって検出されたロールレートに基づいて前記揺動手段により前記第1の保持部材および前記第2の保持部材の一方を他方に対して揺動させる制御手段とを備えたことを特徴とする制御システム。
【請求項8】
前記第1の保持部材と前記第2の保持部材とは前後方向に延びる軸周りに回動可能に取り付けられており、
前記前後方向に延びる軸の延長線は前記後輪と地面との略接点を通過し、
前記制御手段は、前記ロールレート検出手段によって検出されたロールレートに基づいて前記第1の保持部材および前記第2の保持部材の一方を他方に対して相対的に回動させることを特徴とする請求項7記載の制御システム。
【請求項9】
前記自動二輪車の車速を検出する速度検出手段をさらに備え、
前記制御装置は、前記ロールレート検出手段によって検出されたロールレートと係数との積に基づいて前記第1の保持部材に対する前記第2の保持部材の相対的な回動角度を決定し、
前記係数は、前記速度検出手段によって検出された車速に基づいて決定されることを特徴とする請求項8記載の制御システム。
【請求項10】
前記制御装置は、前記速度検出手段によって検出された車速に基づいて決定される応答速度で前記第1の保持部材および前記第2の保持部材の一方を他方に対して相対的に回動させることを特徴とする請求項9記載の制御システム。
【請求項11】
前記制御装置は、1次遅れ要素で前記第1の保持部材および前記第2の保持部材の一方を他方に対して相対的に回動させ、
前記1次遅れ要素の時定数は、前記速度検出手段によって検出された車速に基づいて決定されることを特徴とする請求項9または10記載の制御システム。
【請求項12】
請求項1〜11のいずれかに記載の制御システムと、
後輪を回転させるための駆動力を発生する駆動手段と、
前記駆動手段により発生された駆動力を前記後輪へ伝達するための駆動力伝達手段とを備えることを特徴とする自動二輪車。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2007−125917(P2007−125917A)
【公開日】平成19年5月24日(2007.5.24)
【国際特許分類】
【出願番号】特願2005−318200(P2005−318200)
【出願日】平成17年11月1日(2005.11.1)
【出願人】(000010076)ヤマハ発動機株式会社 (3,045)
【Fターム(参考)】
【公開日】平成19年5月24日(2007.5.24)
【国際特許分類】
【出願日】平成17年11月1日(2005.11.1)
【出願人】(000010076)ヤマハ発動機株式会社 (3,045)
【Fターム(参考)】
[ Back to top ]