
制御システム及びプログラム
【課題】現在の運転が走行距離を稼げる運転なのかどうかが従来よりも把握しやすい表示制御システム等を提供する。
【解決手段】車両から車両の燃料消費に関する情報である燃料情報を取得し、当該燃料情報に基づいて燃料情報にはない瞬間燃費とは異なる単位の燃料消費に関する値である算出値を算出し、当該算出値を用いた表示をする制御を行う。車両情報として取得した瞬間燃費の値から単位がcc/kmの値(1km走行換算燃料量)を算出して表示する領域51、車両情報として取得したエンジン負荷の値(単位%)と、車速の値(単位km/h)とから、エンジン負荷/車速の値を算出して表示する領域53、車両情報として取得したアクセル開度の値(単位%)と、車速の値(単位km/h)とから、アクセル開度/車速の値を算出して表示する領域55を備える。
【解決手段】車両から車両の燃料消費に関する情報である燃料情報を取得し、当該燃料情報に基づいて燃料情報にはない瞬間燃費とは異なる単位の燃料消費に関する値である算出値を算出し、当該算出値を用いた表示をする制御を行う。車両情報として取得した瞬間燃費の値から単位がcc/kmの値(1km走行換算燃料量)を算出して表示する領域51、車両情報として取得したエンジン負荷の値(単位%)と、車速の値(単位km/h)とから、エンジン負荷/車速の値を算出して表示する領域53、車両情報として取得したアクセル開度の値(単位%)と、車速の値(単位km/h)とから、アクセル開度/車速の値を算出して表示する領域55を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の燃料消費に関する情報を表示させる制御システム等に関するものである。
【背景技術】
【0002】
特許文献1には、所定測定期間(1秒間)の瞬間燃費FRを、その測定期間の走行距離Lをその測定期間の燃料消費量Fで除して算出(燃費FR=走行距離L/燃料消費量F)し、その算出した数値を表示する思想が開示されている。一般的に表示される瞬間燃費の単位は、km/lである。車両の平均燃費は車両ごと所定の測定方法により測定され公表されており、また、いわゆる満タン法等によって、車両の給油時にその給油量と前回給油からの走行距離に基づいて平均燃費を算出することもでき、運転者は、この平均燃費と瞬間燃費とを比較することで現在の瞬間の燃費が平均燃費に比べ、よい状態なのか悪い状態なのかを判断して運転を行うことができる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2003−42000号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、瞬間燃費は、例えば、燃料1リットルあたり何キロメートル走行できるのかを示すものであるため、平均燃費との比較は容易であるが、どの程度走行距離が稼げているのかを直感的に把握しにくいという問題があった。
【0005】
そこで、本発明は、係る問題等を解決するためになされたもので、現在の運転が走行距離を稼げる運転なのかどうかが従来よりも把握しやすい制御システム等を提供することを目的とする。
【課題を解決するための手段】
【0006】
(1)上述した目的を達成するために、本発明に係る制御システムは、瞬間燃費を表示する制御を行う機能を備えた制御システムにおいて、車両の燃料消費に関する情報である燃料情報を取得し、当該燃料情報に基づいて前記燃料情報にはない瞬間燃費とは異なる単位の燃料消費に関する値である算出値を算出し、当該算出値を用いた表示をする制御を行うことを特徴とする。
【0007】
瞬間燃費としては、例えば、その測定期間の走行距離Lをその測定期間の燃料消費量Fで除して算出する。例えば、燃料1リットルあたり何キロメートル走行できるのか(km/l)を算出して表示する制御を行う。
【0008】
算出値は瞬間燃費とは異なる単位の燃料消費に関する値であって、車両の燃料消費に関する情報である燃料情報自体の単位とも異なる値である。
【0009】
このような単位の値を算出してその算出した値を表示することで、現在の運転が走行距離を稼げる運転なのかどうかが従来よりも把握しやすい制御システムを実現できる。
【0010】
(2)例えば、前記燃費情報を取得するための車両情報線への接続部を有する構成とするとよく、接続部を介して取得した燃料情報に基づいて前記算出値を表示する制御を行うとよい。
(3)そして、前記算出値は、走行距離をどのくらい稼げているかを示す値とする構成とするとよい。
【0011】
(4)例えば、前記算出値は、一定距離あたりの値とする構成とするとよい。すなわち単位として一定距離あたりの単位を持つようにするとよい。一定距離あたりの単位とは例えば毎km、毎mなどである。
(5)例えば、前記燃料情報として瞬間燃費を取得し、前記算出値として一定距離走行するのに必要な燃料量を算出する構成とするとよい。
【0012】
(6)(5)の算出値の単位は、例えば、cc/kmとする構成とするとよい。
このようにすれば、1キロメートルあたり何ccの燃料を消費するのかが表示されることとなり、どのくらい走行距離が稼げているのかを直感的に把握することができる。
【0013】
(7)特に、異なる複数の種類の前記燃費情報を取得し、当該複数の燃費情報に基づいて前記算出値を算出する構成とすると良い。複数の燃費情報を表示する場合に比べ、容易に現在の運転が走行距離を稼げる運転なのかどうかを把握することができる。
【0014】
(8)前記燃費情報としてエンジン動作に因果関係を有する値と車速とを取得し、前記算出値として当該因果関係を有する値を前記車速で除した値を算出する構成とするとよい。車速は一定時間に走行できる距離を示すものであり、例えば一定時間を1時間とし、距離をキロメートルとすれば、その単位は例えばkm/hとなる。したがって、この場合、算出値として当該因果関係を有する値を前記車速で除した値の単位は、((因果関係を有する値の単位)・h/km)となり、(4)の具体例の1つともいえる。
特に当該因果関係を有する値としてはエンジン負荷やアクセル開度とするとよい。
【0015】
(9)例えば、前記燃費情報としてエンジン負荷と車速を取得し、前記算出値として前記エンジン負荷を前記車速で除した値を算出する構成とするとよい。
(10)また、例えば、前記燃費情報としてアクセル開度と車速を取得し、前記算出値としてアクセル開度を車速で除した値を算出する構成とするとよい。
【0016】
前記(1)〜(10)の構成要素は適宜組み合わせて構成するとよい。
(11)(1)〜(10)のいずれかに記載の車両情報表示システムの機能をコンピュータに実現させるためのプログラムとして構成するとよい。
【発明の効果】
【0017】
本発明によれば、現在の運転が走行距離を稼げる運転なのかどうかが従来よりも把握しやすい制御システム等を提供することができる。
【図面の簡単な説明】
【0018】
【図1】本発明の好適な一実施形態であるレーダー探知機の構成を示す図である。
【図2】レーダー探知機のブロック図である。
【図3】待ち受け画面・レーダースコープ・GPS警報の表示例を示す図である。
【図4】レーダー波警報機能における警報画面の表示例を示す図である。
【図5】第二車両情報表示機能による画面の表示例を示す図である。
【発明を実施するための形態】
【0019】
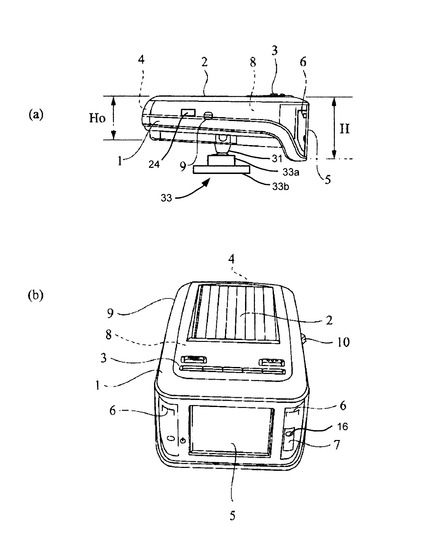
図1,図2は、本発明の制御システムとして好適な一実施形態であるレーダー探知機の構成を示している。本レーダー探知機は通常ダッシュボード上に取り付けられる。本レーダー探知機は通常ダッシュボード上に台座33のプレート33bの底面を貼りつけて固定される。台座33の上部にはボールジョイント受け部33aを設けており、ケース本体1の底面から下方に伸びる支柱部31の下端部に設けたボール部をこのボールジョイント受け部33aに挿し込み、ボール部をその可動範囲内の任意の角度・姿勢で保持させることができる。台座33は、その上面所定位置に球面状の凹部を備えており、台座33は、ゴム等の弾性変形可能で、適度な摩擦係数を有する材質から構成している。ボール部の外径と、凹部の内径とはほぼ等しく設定している。これにより、ボール部が凹部内に入り込んだ状態では、ボール部の外形状と凹部の内形状とが略符合し、ボール部は球面に沿って任意の方向に回転・移動できるようになる。そして、両者の径をほぼ一致させると共に、凹部の内形状に適度な摩擦係数を持たせることで、ボール部を任意の角度・姿勢で保持させることができる。さらに、台座33は弾性変形が可能であるので、図1に示す状態から台座33を保持しつつケース本体1を上方に引き上げる方向に付勢すると、凹部の開口部の径が広がりボール部を凹部から離脱させることができる。逆に、台座33とボール部とが分離した状態の場合、ボール部を凹部の開口部に押し当て、その状態のまま台座33に向けて押し込むように付勢すると、凹部の弾性変形によりその開口部が一旦広がり凹部内にボール部が収納される。その後は、台座33の弾性復元力により凹部の形状は元に戻り、ボール部が簡単に凹部から離脱するのが抑制される。また、台座33の底面には、粘着シートや両面接着テープや面ファスナー等の接着部材の一面が装着され、その接着部材の他の面がダッシュボード等の車室内の所定位置に取り付けられる。これにより、係る車室内の運転者から視認可能な所定位置に台座33が固定される。
【0020】
本レーダー探知機は、図1に示すように、ケース本体1の上面にソーラーパネル2及びスイッチ部3を配置し、ケース本体1の前面側(車両前方へ配置される側(フロントガラス側))の内部に速度測定装置の発する周波数帯のマイクロ波を検知するマイクロ波受信器4を配置する。一方、ケース本体1の後面側(車両後方へ配置される側(ユーザ側(ドライバー側))には、表示部5と警報ランプ6と赤外線通信機7とリモコン受信器16を配置している。また、ケース本体1の上面側内部には、GPS受信器8を配置する。さらに、ケース本体1の一方の側面には、アダプタージャック9を配置し、他方の側面には電源スイッチ10並びに図示省略するDCジャックを配置する。ケース本体の底面側内部にはバッテリを備え、このバッテリにはソーラーパネル2及びDCジャックから供給される電力を充電し、各部に電力を供給する。また、ケース本体1内には、スピーカ20も内蔵している。本実施形態では、表示部5はバックライトを有する2.4インチの小型カラードットマトリックス液晶ディスプレイであり、ケース本体1の後面側(車両後方へ配置される側(ユーザ側(ドライバー側))を表示面としている。表示部5を実装するケース本体1の後方側の高さHは、その他の部位の高さH0よりも大きくしている。
【0021】
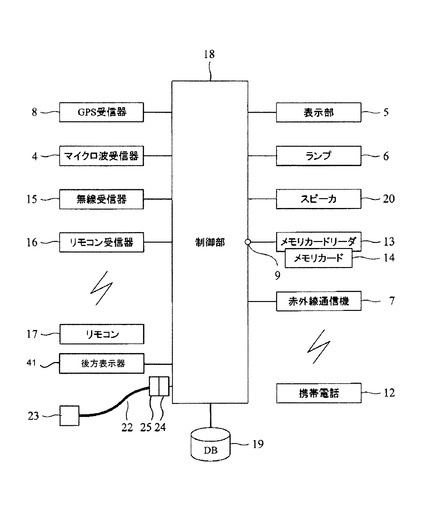
図2に示すように、赤外線通信機7は携帯電話機12等の赤外線通信機を内蔵した通信装置との間でデータの送受を行なう。アダプタージャック9は、メモリカードリーダ13を接続する端子である。アダプタージャック9にメモリカードリーダ13を接続することで、そのメモリカードリーダ13に装着されたメモリカード14に格納されたデータを内部に取り込んだり、データベース19や制御部18のメモリの内容をメモリカード14に書き込んだりすることができる。より具体的には、メモリカード14に格納されたデータに、新規な目標物の情報(経度・緯度を含む位置情報,種別情報等)などの更新情報がある場合、その更新情報を制御部18が本レーダー探知機に内蔵されるデータベース19に格納(ダウンロード)し、データベース19のデータを更新する。なお、メモリカードリーダ13の機能は、本体ケース1内に内蔵するように構成してもよい。
【0022】
データベース19は、制御部18のマイコン内あるいはマイコンに外付けした不揮発性メモリ(たとえばEEPROM)である。データベース19には、出荷時に一定の目標物に関する情報を登録しており、その後に追加された目標物についてのデータ等は上記のようにしてデータ更新することができる。また、データ更新は、赤外線通信機7を介して行なうこともできる。
【0023】
DCジャックは、図示省略のシガープラグコードを接続するためのもので、そのシガープラグコードを介して車両のシガーソケットに接続して電源供給を受け得るようにする。
【0024】
無線受信器15は、飛来する所定周波数の無線を受信する。リモコン受信器16は、赤外線によりリモコン(携帯機:子機)17とデータ通信をし、本装置に対する各種の設定を行なう。また、スイッチ部3も制御部18に接続され(図示省略)、リモコン17と同様の設定を行えるようになっている。リモコン17には、待受切替ボタン、設定ボタン、選択ボタン、取消ボタン、決定ボタン、リセットボタン、上下左右の十字ボタンを備えている。
【0025】
さらに本実施形態のレーダー探知機は、図2に示すように車両に実装されているOBD−II(IIはローマ数字の「2」であり、以下「OBD−II」を「OBD2」と記す)コネクタに接続する接続ケーブル22を備え、この接続ケーブル22の先端には、車両のOBD2コネクタに着脱自在に装着できるコネクタ端子23が取り付けられている。OBD2コネクタは、故障診断コネクタとも称され、車両のECUに接続され、各種の車両情報が出力される。さらに本実施形態では、接続ケーブル22の他端には、レーダー探知機のケース本体1の側面に設けたソケット口24と接続するためのコネクタ端子25を設けており、レーダー探知機に対しても接続ケーブル22を着脱できるようにしている。もちろん、接続ケーブル22をレーダー探知機に直接接続するようにしても良い。
【0026】
そこで、この接続ケーブル22に取り付けられたコネクタ端子23と、車両本体側のOBD2コネクタとを連結することで、制御部18は、各種の車両情報を所定間隔(例えば250msごと)に取得する。この車両情報としては、車速、エンジン回転数、エンジン負荷率、スロットル開度、燃料流量、瞬間燃費、吸入空気量(MAF)、インジェクション開時間、残燃料量、アクセル開度、ウインカー情報(左右のウインカーの動作(ON/OFF))、ブレーキ開度、ハンドルの回転操舵角情報等がある。
【0027】
また、制御部18は、CPU,ROM,RAM,不揮発性メモリ、I/O等を備えるマイコンであり、上記の各種の入力機器から入力される情報に基づき所定の処理を実行し、上記の各種の出力機器を利用して所定の警報・メッセージや情報を出力する。なお、これらの基本構成は、基本的に従来のものと同様のものを用いることができる。
【0028】
本実施形態のレーダー探知機における機能は、制御部18に有するコンピュータが実行するプログラムとして制御部18のEEPROM上に格納され、これを制御部18に有するコンピュータが実行することで実現される。
【0029】
制御部18の有するプログラムによってコンピュータが実現する機能としては、GPSログ機能、待ち受け画面表示機能、レーダースコープ表示機能、第一車両情報表示機能、第二車両情報表示機能、GPS警報機能、レーダー波警報機能、無線警報機能などがある。
【0030】
GPSログ機能は、制御部18が1秒ごとにGPS受信器8によって検出された現在位置をその検出した時刻および速度(車速)と関連づけて位置履歴として不揮発性メモリに記憶する機能である。この位置履歴は例えばNMEA形式で記録する。
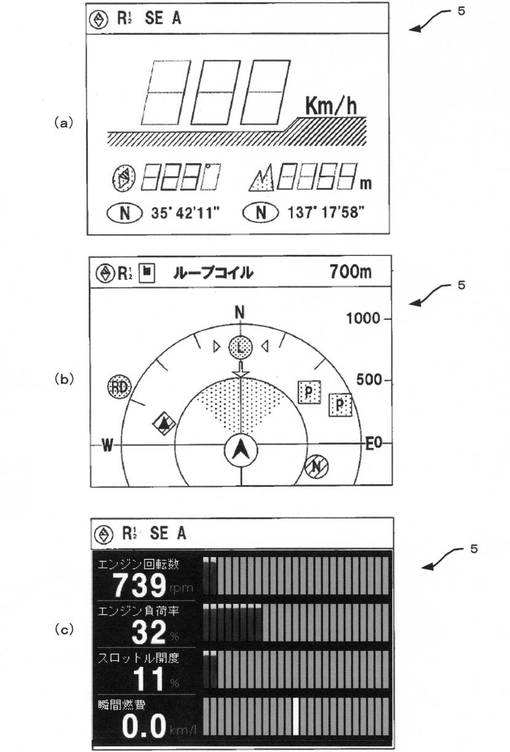
待ち受け画面表示機能は、図3(a)に示すように、GPS受信器8によって検出した自車両の速度、緯度、経度、高度を表示部5に表示する機能である。
【0031】
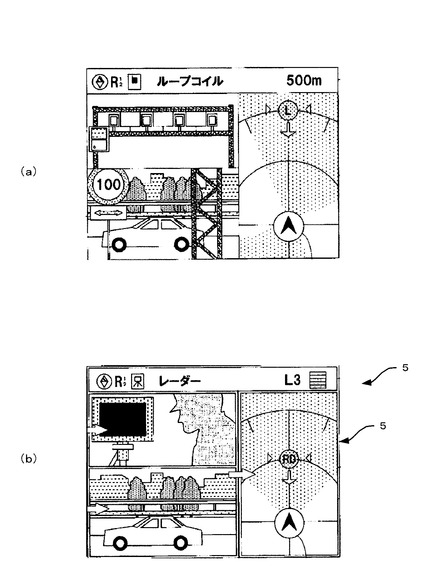
レーダースコープ表示機能は、図3(b)に示すように、GPS受信器8によって検出した現在位置から所定の範囲内(例えば約1kmの範囲内)にある目標物をデータベース19に記憶された位置情報に基づいて検索し、自車位置と目標物の位置との相対的な位置関係を表示部5に表示させる機能である。図3(b)中の左側の「W」が西、右側の「E」が東、上側の「N」が北の方角を示し、「W」と「E」を結ぶ左右方向の線と「N」から下へ伸びる上下方向の線との交点にあるアイコンが自車位置を示している。また「L」「RD」「P」「N」等の文字を有するアイコンが目標物の種類と位置を示す。
【0032】
第一車両情報表示機能は、図3(c)に示すように、前述したようにOBD2コネクタを介して車両から取得した車両情報のうち、エンジン負荷率の現在値に加え、スロットル開度、燃料流量、瞬間燃費の現在値と、本レーダー探知機を車両に取り付けたときから現在までに1秒おきに取得した瞬間燃費の平均値である平均燃費を表示するとともに、エンジン負荷率の大きさに応じてエンジンの形状を示す3Dオブジェクトの表示態様を変化させて表示する。
【0033】
図3(a)に示すような待ち受け画面表示機能実行中にリモコン17に設けた待受切替ボタンの押下が検出された場合、図3(b)に示すようなレーダースコープ表示機能に切り替える。また、レーダースコープ表示機能実行中にリモコン17に設けた待受切替ボタンの押下が検出された場合、図3(c)に示す第一車両情報表示機能に切り替える処理を行う。また、第一車両情報表示機能実行中にリモコン17に設けた待受切替ボタンの押下が検出された場合、第二車両情報表示機能に切り替える処理を行う。また、第二車両情報表示機能実行中にリモコン17に設けた待受切替ボタンの押下が検出された場合、待ち受け画面表示機能に切り替える処理を行う。
【0034】
制御部18は、待ち受け画面表示機能、レーダースコープ表示機能、車両情報表示機能、(以下これらの機能を総称して待受機能と称する)の実行中に、発生したイベントに応じて、GPS警報機能、レーダー波警報機能、無線警報機能等の各機能を実現する処理を実行し、当該機能の処理終了時には元の待受機能の処理に戻る。各機能の優先度は、高いほうから、レーダー波警報機能、無線警報機能、GPS警報機能の順に設定している。
【0035】
GPS警報機能は、制御部18に有するタイマーからのイベントにより所定時間間隔(1秒間隔)で実行される処理であり、データベース19に記憶された目標物の緯度経度とGPS受信器8によって検出した現在位置の緯度経度から両者の距離を求め、求めた距離が所定の接近距離(例えば500m以内)になった場合に、表示部5に図4(a)に示すようなGPS警報表示をし、スピーカ20からその旨を示す接近警告の音声を出力する処理である。
【0036】
こうした目標物としては、居眠り運転事故地点、レーダー、制限速度切替りポイント、取締エリア、検問エリア、駐禁監視エリア、Nシステム、交通監視システム、交差点監視ポイント、信号無視抑止システム、警察署、事故多発エリア、車上狙い多発エリア、急/連続カーブ(高速道)、分岐/合流ポイント(高速道)、ETCレーン事前案内(高速道)、サービスエリア(高速道)、パーキングエリア(高速道)、ハイウェイオアシス(高速道)、スマートインターチェンジ(高速道)、PA/SA内 ガソリンスタンド(高速道)、トンネル(高速道)、ハイウェイラジオ受信エリア(高速道)、県境告知、道の駅、ビューポイントパーキング等があり、これらの目標物の種別情報とその位置を示す緯度経度情報と表示部5に表示する模式図または写真のデータと音声データとを対応付けてデータベース19に記憶している。
【0037】
レーダー波警報機能は、マイクロ波受信器4によって速度測定装置(移動式レーダー等(以下、単に「レーダー」と称する))から発せられる周波数帯のマイクロ波に対応する信号が検出された場合に、表示部5に対して警報画面を表示するとともに、スピーカ20から警報音を出力する警報機能である。例えば、レーダーの発するマイクロ波の周波数帯のマイクロ波がマイクロ波受信器4によって検出された場合に、図4(b)に示すように、データベース19に記憶されたレーダーの模式図または写真を表示部5に警報画面として表示するとともに、データベース19に記憶された音声データを読み出して「レーダーです。スピード注意」という音声をスピーカ20から出力する。音声出力中は、警報ランプ6を点燈させる。
【0038】
無線警報機能は、無線受信器15によって、緊急車両等の発する無線電波を受信した場合に、その走行等の妨げとならないよう、警報を発する機能である。無線警報機能においては、取締無線、カーロケ無線、デジタル無線、特小無線、署活系無線、警察電話、警察活動無線、レッカー無線、ヘリテレ無線、消防ヘリテレ無線、消防無線、救急無線、高速道路無線、警備無線等の周波数をスキャンし、スキャンした周波数で、無線を受信した場合には、データベース19に無線種別ごとに記憶されたその周波数に対応する無線を受信した旨の模式図を警報画面として表示部5に表示するとともに、データベース19に無線種別ごとに記憶された音声データを読み出して、スピーカ20からその無線の種別を示す警報音声を出力する。たとえば、取締無線を受信した場合には「取締無線です。スピード注意」のように音声を出力する。音声出力中は、警報ランプ6を点燈させる。
【0039】
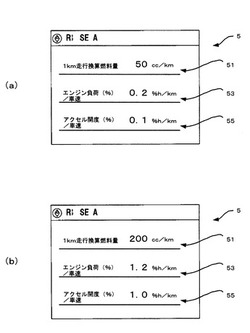
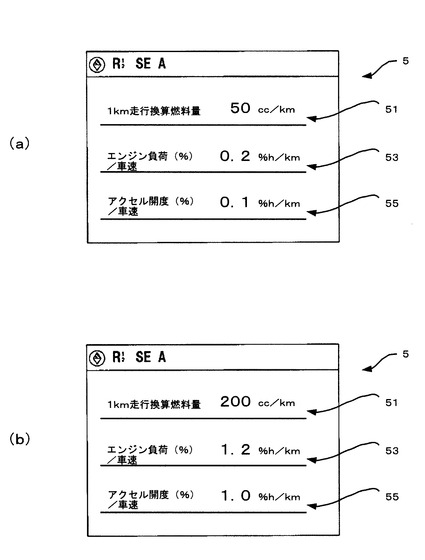
本実施形態のレーダー探知機は、これらの機能に加え、第二車両情報表示機能を備える。第二車両情報表示機能は、表示部5に図5に示すような第二車両情報表示画面を表示する機能である。第二車両情報表示画面は、画面上部から画面下部に向けて順に、1km走行換算燃料量表示領域51、エンジン負荷/車速表示領域53、アクセル開度/車速表示領域55を備える。各表示領域51・53・55は、画面左側に各表示領域の名称、右側にその単位、中心部にその算出値を表示する。
【0040】
1km走行換算燃料量表示領域51は、車両情報として取得した瞬間燃費の値から単位がcc/kmの値(1km走行換算燃料量)を算出して表示する領域である。瞬間燃費は250msごとに車両側から取得し、この算出処理と表示処理もそれに続いて行う(250msごとに行われることになる)。この瞬間燃費の単位はkm/l(キロメートル毎リットル)で取得される。したがって、この瞬間燃費の値の逆数(単位l/km(リットル毎キロメートル))を求めこれを1000倍して単位がcc/kmの値(1km走行換算燃料量)を算出して、この値を1km走行換算燃料量表示領域51の算出値として表示する。図5(a)は、車両情報として取得した瞬間燃費の値が20km/lの場合の算出値の表示例であり、1km走行換算燃料量=1/20*1000=50cc/kmと算出された表示状態である。一方、図5(b)は、車両情報として取得した瞬間燃費の値が5km/lの場合の算出値の表示例であり、1km走行換算燃料量=1/5*1000=200cc/kmと算出された状態である。
【0041】
このように、一定距離(この例では1km)走行するのに必要な燃料量(この例ではcc)を表示することで、現在の運転が1kmあたりどの程度の燃料消費量に対応する状態であるかを把握することが容易にできる。また、走行時にこの値の変化を見て運転することで、通常どのくらいの値になるのかを把握することができる。そしてこの通常値と現在の表示された値とを比較することで走行距離をどのくらい稼げているかを直感的に把握することができ、アクセルの踏み込み量などを調整して燃料を節約することが容易にできる。特にこの1kmという距離は、時速60kmで走行していると1分で移動できる距離である。そして人が徒歩で移動できる距離(運転者が徒歩で移動したことがある距離)である。したがって運転者にといってこの距離は、短すぎず長すぎず直感的に把握できる距離であり、運転者にとって把握が容易かつ適切な距離である。また、ccという単位は、例えば牛乳瓶が200ccであるといった具合に、一般生活おいて馴染み深い単位であり、人が感覚的に把握することが容易にできる単位である。
【0042】
エンジン負荷/車速表示領域53は、車両情報として取得したエンジン負荷(エンジン負荷率)の値(単位%(パーセント))と、車速の値(単位km/h(キロメートル毎時))とから、エンジン負荷率を車速で除した値であるエンジン負荷/車速の値を算出して表示する領域である。エンジン負荷と車速は250msごとに車両側から取得し、この算出処理と表示処理もそれに続いて行う(250msごとに行われることになる)。図5(a)は、車両情報として取得したエンジン負荷が10%、車速が50km/hの場合の表示例であり、エンジン負荷/車速=10/50=0.2(%h/km)と算出された表示状態である。一方、図5(b)は、車両情報として取得したエンジン負荷が60%、車速が50km/hの場合の表示例であり、エンジン負荷/車速=60/50=1.2(%h/km)と算出された表示状態である。
【0043】
このエンジン負荷/車速は、現在の運転が1kmあたりどの程度のエンジン負荷量(エンジン負荷に関するある種の値(この例ではエンジン負荷×時間))に対応するかを示す値であるから、現在のエンジン負荷を距離と関連付けて把握することができる。走行時にこの値の変化を見て運転することで、通常どのくらいの値になるのかを把握することができ、この把握した通常値と現在の表示された値とを比較することで現在の運転が走行距離をどのくらい稼げているかを直感的に把握することができる。そして、アクセルの踏み込み量などを調整して燃料を節約することが容易にできる。図3(c)のようなエンジン負荷の表示だけでも、アクセルの踏み込み量(アクセル開度)によって大きさが変化することは分かるが、同じアクセル開度でも上り坂、下り坂でエンジン負荷の大きさは変わる。例えば、惰性で走行距離を稼ぐ場合がもっとも小さい値になり、傾斜の大きい上り坂で速度を上げる場合が大きい値となる。トップから4、3にギヤチェンジした場合にも変化する。この指標を表示することで、どのギヤでこの上り坂を上ったらもっとも効率が良いかがわかる。このように、エンジン負荷/車速は、なるべくエンジンに負荷を掛けずに走行距離を稼ぎたいという指標になる。
【0044】
同様に、アクセル開度/車速表示領域55は、車両情報として取得したアクセル開度の値(単位%(パーセント))と、車速の値(単位km/h(キロメートル毎時))とから、アクセル開度を車速で除した値であるアクセル開度/車速の値を算出して表示する領域である。アクセル開度と車速は250msごとに車両側から取得し、この算出処理と表示処理もそれに続いて行う(250msごとに行われることになる)。図5(a)は、車両情報として取得したアクセル開度が5%、車速が50km/hの場合の表示例であり、アクセル開度/車速=5/50=0.1(%h/km)と算出された表示状態である。一方、図5(b)は、車両情報として取得したアクセル開度が50%、車速が50km/hの場合の表示例であり、アクセル開度/車速=50/50=1.0(%h/km)と算出された表示状態である。
【0045】
このアクセル開度/車速は、現在の運転が1kmあたりどの程度のアクセル開度量(アクセル開度に関するある種の値(この例ではアクセル開度×時間))に対応するかを示す値であるから、現在のアクセル開度を距離と関連付けて把握することができる。走行時にこの値の変化を見て運転することで、通常どのくらいの値になるのかを把握することができ、この把握した通常値と現在の表示された値とを比較することで現在の運転が走行距離をどのくらい稼げているかを直感的に把握することができる。そして、アクセルの踏み込み量などを調整して燃料を節約することが容易にできる。例えばアクセル開度を表示するだけでも、アクセルの踏み込み量(アクセル開度)によって大きさが変化することは分かるが、同じアクセル開度でも上り坂、下り坂でエンジン負荷の大きさは変わる。例えば、惰性で走行距離を稼ぐ場合がもっとも小さい値になり、傾斜の大きい上り坂で速度を上げる場合が大きい値となる。トップから4、3にギヤチェンジした場合にも変化する。この指標を表示することで、どのギヤでこの上り坂を上ったらもっとも効率が良いかがわかる。このように、アクセル開度/車速は、なるべくエンジンに負荷を掛けずに走行距離を稼ぎたいという指標になる。
【0046】
例えば、図5(a)と図5(b)が同一の道路地点上での昨日の表示画面と現在の表示画面である場合、昨日のほうが走行距離を稼げていたことになり、現在の表示画面を見た運転者は、アクセルを緩める(アクセル開度を小さくする)などして走行距離を稼げる状態にすることが容易にできる。
【0047】
本実施形態では、本発明に係る制御システムとしての本レーダー探知機は、瞬間燃費を表示する制御を行う第一車両情報表示機能を備えた制御システムであり、車両の燃料消費に関する情報である燃料情報である瞬間燃費、エンジン負荷、アクセル開度、車速を取得する。そして、これらの燃料情報に基づいてこれら燃料情報にはない単位の値であり、かつ、瞬間燃費の単位であるkm/lとは異なる単位の燃料消費に関する値である1km走行換算燃料量、エンジン負荷/車速、アクセル開度/車速を算出し、これら算出値を用いた表示をする制御を行っている。このように、通常の車両情報のデータには無い項目を算出して目的に応じた指標として利用している。このような単位の値を算出して、その算出値を表示することで、現在の運転が走行距離を稼げる運転なのかどうかが従来よりも把握しやすい制御システムを実現できる。特にこれらの車両情報はその瞬間の瞬間値を示しており時々刻々と変化する値である。したがってまさに現在の運転が走行距離を稼げる運転なのかどうかを把握することができる。
【0048】
なお、本実施形態では、図3(c)に示すような第一車両情報表示機能による表示画面と図5に示すような第二車両情報表示機能による表示画面とはリモコン17による切り替え指示に基づいて切り替える構成としたが、図3(c)に示すような第一車両情報表示機能による表示画面と図5に示すような第二車両情報表示機能による表示画面とは一定時間間隔(例えば5秒間隔)で相互に切り替えて表示するようにしてもよい。また、図3(c)に示すような第一車両情報表示機能による表示画面の各項目と図5に示すような第二車両情報表示機能による表示画面の各項目を同時に1つの画面に表示する構成としてもよい。
【0049】
本実施形態では、燃費情報を取得するための車両情報線への接続部として、車両に実装されているOBD2コネクタに接続する接続ケーブル22とコネクタ端子23を備える。OBD2コネクタは、車両のECUに接続され、各種の車両情報が出力される。この接続ケーブル22に取り付けられたコネクタ端子23と、車両本体側のOBD2コネクタとを連結することで、制御部18は、車両情報を250msごとに取得して、各値を算出して図5に示した表示を行う。そして、これら算出値は、走行距離をどのくらい稼げているかを示す値とする構成としている。具体的には、これら算出値は、一定距離あたりの値とする構成としている。本実施形態では、「一定距離あたりの値」の単位として、毎kmを用いているが、毎mや毎マイルなどとしてもよい。本実施形態では、燃料情報として瞬間燃費を取得し、算出値として一定距離走行するのに必要な燃料量を算出する構成としており、その算出値の単位は、cc/kmとする構成としている。このようにすることで、1キロメートルあたり何ccの燃料を消費するのかが表示されることとなり、どのくらい走行距離が稼げているのかを直感的に把握することができる。
【0050】
本実施形態では、エンジン負荷と車速、アクセル開度と車速といった、異なる2種類の燃費情報を取得し、これら複数の燃費情報に基づいて算出値を算出する構成としている。このようにすることで、複数の燃費情報をそれぞれ別々に表示する場合に比べ、現在の運転が走行距離を稼げる運転なのかどうかを容易に把握することができる。
【0051】
本実施形態では、燃費情報としてエンジン動作に因果関係を有する値であるエンジン負荷並びにアクセル開度及び車速を取得し、算出値としてこの因果関係を有する値を車速で除した値を算出する構成としている。車速は一定時間に走行できる距離を示すものであり、km/hで表現されている。したがって、算出値としてこの因果関係を有する値を車速で除した値の単位は、((因果関係を有する値の単位)・h/km)となって、1kmの距離あたりの量となる。そのため、距離との関係で表示された値を把握することが容易にでき、現在の運転が走行距離を稼げる運転なのかどうかを容易に把握することができる。因果関係を有する値は、アクセル開度のように原因となる値でも、エンジン負荷のように結果となる値でもよい。この因果関係を有する値から算出された距離あたりの量を見て、運転者が制御する運転を心がけることで、現在の運転をより走行距離を稼げる運転に導くことができる。
上述した各構成要素は適宜組み合わせてレーダー探知機を構成するとよい。
【0052】
本実施形態では、シガープラグコードを介して車両のシガーソケットに接続して電源供給を受け得るようにしたがOBD2コネクタから電源の供給を受けるようにしてもよい。
【0053】
また、本実施形態では、レーダー探知機の例で説明したが、車載用の各種の電子機器の機能として実施することができる。たとえば、ナビゲーション装置や、ドライブレコーダ、カーオーディオの機能として組み込んでもよい。また本実施例で記載した数値の値は、実験等を行って適宜、効果を奏する値に変更してもよい。表示部5の画面サイズなども任意のものとすることができる。また、制御部18には、各機能や警報の優先順位をリモコン17等からのユーザからの指示に基づいて設定する機能を設け、この設定された優先順位で制御部18が処理を行うように構成してもよい。
【符号の説明】
【0054】
1 ケース本体
2 ソーラーパネル
4 マイクロ波受信器
5 表示部
6 ランプ
7 赤外線通信機
8 GPS受信器
9 アダプタージャック
10 電源スイッチ
11 携帯電話機
12 メモリカードリーダ
14 メモリカード
15 無線受信器
16 リモコン受信器
17 リモコン
18 制御部
19 データベース
20 スピーカ
21 DCジャック
22 接続ケーブル
【技術分野】
【0001】
本発明は、車両の燃料消費に関する情報を表示させる制御システム等に関するものである。
【背景技術】
【0002】
特許文献1には、所定測定期間(1秒間)の瞬間燃費FRを、その測定期間の走行距離Lをその測定期間の燃料消費量Fで除して算出(燃費FR=走行距離L/燃料消費量F)し、その算出した数値を表示する思想が開示されている。一般的に表示される瞬間燃費の単位は、km/lである。車両の平均燃費は車両ごと所定の測定方法により測定され公表されており、また、いわゆる満タン法等によって、車両の給油時にその給油量と前回給油からの走行距離に基づいて平均燃費を算出することもでき、運転者は、この平均燃費と瞬間燃費とを比較することで現在の瞬間の燃費が平均燃費に比べ、よい状態なのか悪い状態なのかを判断して運転を行うことができる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2003−42000号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、瞬間燃費は、例えば、燃料1リットルあたり何キロメートル走行できるのかを示すものであるため、平均燃費との比較は容易であるが、どの程度走行距離が稼げているのかを直感的に把握しにくいという問題があった。
【0005】
そこで、本発明は、係る問題等を解決するためになされたもので、現在の運転が走行距離を稼げる運転なのかどうかが従来よりも把握しやすい制御システム等を提供することを目的とする。
【課題を解決するための手段】
【0006】
(1)上述した目的を達成するために、本発明に係る制御システムは、瞬間燃費を表示する制御を行う機能を備えた制御システムにおいて、車両の燃料消費に関する情報である燃料情報を取得し、当該燃料情報に基づいて前記燃料情報にはない瞬間燃費とは異なる単位の燃料消費に関する値である算出値を算出し、当該算出値を用いた表示をする制御を行うことを特徴とする。
【0007】
瞬間燃費としては、例えば、その測定期間の走行距離Lをその測定期間の燃料消費量Fで除して算出する。例えば、燃料1リットルあたり何キロメートル走行できるのか(km/l)を算出して表示する制御を行う。
【0008】
算出値は瞬間燃費とは異なる単位の燃料消費に関する値であって、車両の燃料消費に関する情報である燃料情報自体の単位とも異なる値である。
【0009】
このような単位の値を算出してその算出した値を表示することで、現在の運転が走行距離を稼げる運転なのかどうかが従来よりも把握しやすい制御システムを実現できる。
【0010】
(2)例えば、前記燃費情報を取得するための車両情報線への接続部を有する構成とするとよく、接続部を介して取得した燃料情報に基づいて前記算出値を表示する制御を行うとよい。
(3)そして、前記算出値は、走行距離をどのくらい稼げているかを示す値とする構成とするとよい。
【0011】
(4)例えば、前記算出値は、一定距離あたりの値とする構成とするとよい。すなわち単位として一定距離あたりの単位を持つようにするとよい。一定距離あたりの単位とは例えば毎km、毎mなどである。
(5)例えば、前記燃料情報として瞬間燃費を取得し、前記算出値として一定距離走行するのに必要な燃料量を算出する構成とするとよい。
【0012】
(6)(5)の算出値の単位は、例えば、cc/kmとする構成とするとよい。
このようにすれば、1キロメートルあたり何ccの燃料を消費するのかが表示されることとなり、どのくらい走行距離が稼げているのかを直感的に把握することができる。
【0013】
(7)特に、異なる複数の種類の前記燃費情報を取得し、当該複数の燃費情報に基づいて前記算出値を算出する構成とすると良い。複数の燃費情報を表示する場合に比べ、容易に現在の運転が走行距離を稼げる運転なのかどうかを把握することができる。
【0014】
(8)前記燃費情報としてエンジン動作に因果関係を有する値と車速とを取得し、前記算出値として当該因果関係を有する値を前記車速で除した値を算出する構成とするとよい。車速は一定時間に走行できる距離を示すものであり、例えば一定時間を1時間とし、距離をキロメートルとすれば、その単位は例えばkm/hとなる。したがって、この場合、算出値として当該因果関係を有する値を前記車速で除した値の単位は、((因果関係を有する値の単位)・h/km)となり、(4)の具体例の1つともいえる。
特に当該因果関係を有する値としてはエンジン負荷やアクセル開度とするとよい。
【0015】
(9)例えば、前記燃費情報としてエンジン負荷と車速を取得し、前記算出値として前記エンジン負荷を前記車速で除した値を算出する構成とするとよい。
(10)また、例えば、前記燃費情報としてアクセル開度と車速を取得し、前記算出値としてアクセル開度を車速で除した値を算出する構成とするとよい。
【0016】
前記(1)〜(10)の構成要素は適宜組み合わせて構成するとよい。
(11)(1)〜(10)のいずれかに記載の車両情報表示システムの機能をコンピュータに実現させるためのプログラムとして構成するとよい。
【発明の効果】
【0017】
本発明によれば、現在の運転が走行距離を稼げる運転なのかどうかが従来よりも把握しやすい制御システム等を提供することができる。
【図面の簡単な説明】
【0018】
【図1】本発明の好適な一実施形態であるレーダー探知機の構成を示す図である。
【図2】レーダー探知機のブロック図である。
【図3】待ち受け画面・レーダースコープ・GPS警報の表示例を示す図である。
【図4】レーダー波警報機能における警報画面の表示例を示す図である。
【図5】第二車両情報表示機能による画面の表示例を示す図である。
【発明を実施するための形態】
【0019】
図1,図2は、本発明の制御システムとして好適な一実施形態であるレーダー探知機の構成を示している。本レーダー探知機は通常ダッシュボード上に取り付けられる。本レーダー探知機は通常ダッシュボード上に台座33のプレート33bの底面を貼りつけて固定される。台座33の上部にはボールジョイント受け部33aを設けており、ケース本体1の底面から下方に伸びる支柱部31の下端部に設けたボール部をこのボールジョイント受け部33aに挿し込み、ボール部をその可動範囲内の任意の角度・姿勢で保持させることができる。台座33は、その上面所定位置に球面状の凹部を備えており、台座33は、ゴム等の弾性変形可能で、適度な摩擦係数を有する材質から構成している。ボール部の外径と、凹部の内径とはほぼ等しく設定している。これにより、ボール部が凹部内に入り込んだ状態では、ボール部の外形状と凹部の内形状とが略符合し、ボール部は球面に沿って任意の方向に回転・移動できるようになる。そして、両者の径をほぼ一致させると共に、凹部の内形状に適度な摩擦係数を持たせることで、ボール部を任意の角度・姿勢で保持させることができる。さらに、台座33は弾性変形が可能であるので、図1に示す状態から台座33を保持しつつケース本体1を上方に引き上げる方向に付勢すると、凹部の開口部の径が広がりボール部を凹部から離脱させることができる。逆に、台座33とボール部とが分離した状態の場合、ボール部を凹部の開口部に押し当て、その状態のまま台座33に向けて押し込むように付勢すると、凹部の弾性変形によりその開口部が一旦広がり凹部内にボール部が収納される。その後は、台座33の弾性復元力により凹部の形状は元に戻り、ボール部が簡単に凹部から離脱するのが抑制される。また、台座33の底面には、粘着シートや両面接着テープや面ファスナー等の接着部材の一面が装着され、その接着部材の他の面がダッシュボード等の車室内の所定位置に取り付けられる。これにより、係る車室内の運転者から視認可能な所定位置に台座33が固定される。
【0020】
本レーダー探知機は、図1に示すように、ケース本体1の上面にソーラーパネル2及びスイッチ部3を配置し、ケース本体1の前面側(車両前方へ配置される側(フロントガラス側))の内部に速度測定装置の発する周波数帯のマイクロ波を検知するマイクロ波受信器4を配置する。一方、ケース本体1の後面側(車両後方へ配置される側(ユーザ側(ドライバー側))には、表示部5と警報ランプ6と赤外線通信機7とリモコン受信器16を配置している。また、ケース本体1の上面側内部には、GPS受信器8を配置する。さらに、ケース本体1の一方の側面には、アダプタージャック9を配置し、他方の側面には電源スイッチ10並びに図示省略するDCジャックを配置する。ケース本体の底面側内部にはバッテリを備え、このバッテリにはソーラーパネル2及びDCジャックから供給される電力を充電し、各部に電力を供給する。また、ケース本体1内には、スピーカ20も内蔵している。本実施形態では、表示部5はバックライトを有する2.4インチの小型カラードットマトリックス液晶ディスプレイであり、ケース本体1の後面側(車両後方へ配置される側(ユーザ側(ドライバー側))を表示面としている。表示部5を実装するケース本体1の後方側の高さHは、その他の部位の高さH0よりも大きくしている。
【0021】
図2に示すように、赤外線通信機7は携帯電話機12等の赤外線通信機を内蔵した通信装置との間でデータの送受を行なう。アダプタージャック9は、メモリカードリーダ13を接続する端子である。アダプタージャック9にメモリカードリーダ13を接続することで、そのメモリカードリーダ13に装着されたメモリカード14に格納されたデータを内部に取り込んだり、データベース19や制御部18のメモリの内容をメモリカード14に書き込んだりすることができる。より具体的には、メモリカード14に格納されたデータに、新規な目標物の情報(経度・緯度を含む位置情報,種別情報等)などの更新情報がある場合、その更新情報を制御部18が本レーダー探知機に内蔵されるデータベース19に格納(ダウンロード)し、データベース19のデータを更新する。なお、メモリカードリーダ13の機能は、本体ケース1内に内蔵するように構成してもよい。
【0022】
データベース19は、制御部18のマイコン内あるいはマイコンに外付けした不揮発性メモリ(たとえばEEPROM)である。データベース19には、出荷時に一定の目標物に関する情報を登録しており、その後に追加された目標物についてのデータ等は上記のようにしてデータ更新することができる。また、データ更新は、赤外線通信機7を介して行なうこともできる。
【0023】
DCジャックは、図示省略のシガープラグコードを接続するためのもので、そのシガープラグコードを介して車両のシガーソケットに接続して電源供給を受け得るようにする。
【0024】
無線受信器15は、飛来する所定周波数の無線を受信する。リモコン受信器16は、赤外線によりリモコン(携帯機:子機)17とデータ通信をし、本装置に対する各種の設定を行なう。また、スイッチ部3も制御部18に接続され(図示省略)、リモコン17と同様の設定を行えるようになっている。リモコン17には、待受切替ボタン、設定ボタン、選択ボタン、取消ボタン、決定ボタン、リセットボタン、上下左右の十字ボタンを備えている。
【0025】
さらに本実施形態のレーダー探知機は、図2に示すように車両に実装されているOBD−II(IIはローマ数字の「2」であり、以下「OBD−II」を「OBD2」と記す)コネクタに接続する接続ケーブル22を備え、この接続ケーブル22の先端には、車両のOBD2コネクタに着脱自在に装着できるコネクタ端子23が取り付けられている。OBD2コネクタは、故障診断コネクタとも称され、車両のECUに接続され、各種の車両情報が出力される。さらに本実施形態では、接続ケーブル22の他端には、レーダー探知機のケース本体1の側面に設けたソケット口24と接続するためのコネクタ端子25を設けており、レーダー探知機に対しても接続ケーブル22を着脱できるようにしている。もちろん、接続ケーブル22をレーダー探知機に直接接続するようにしても良い。
【0026】
そこで、この接続ケーブル22に取り付けられたコネクタ端子23と、車両本体側のOBD2コネクタとを連結することで、制御部18は、各種の車両情報を所定間隔(例えば250msごと)に取得する。この車両情報としては、車速、エンジン回転数、エンジン負荷率、スロットル開度、燃料流量、瞬間燃費、吸入空気量(MAF)、インジェクション開時間、残燃料量、アクセル開度、ウインカー情報(左右のウインカーの動作(ON/OFF))、ブレーキ開度、ハンドルの回転操舵角情報等がある。
【0027】
また、制御部18は、CPU,ROM,RAM,不揮発性メモリ、I/O等を備えるマイコンであり、上記の各種の入力機器から入力される情報に基づき所定の処理を実行し、上記の各種の出力機器を利用して所定の警報・メッセージや情報を出力する。なお、これらの基本構成は、基本的に従来のものと同様のものを用いることができる。
【0028】
本実施形態のレーダー探知機における機能は、制御部18に有するコンピュータが実行するプログラムとして制御部18のEEPROM上に格納され、これを制御部18に有するコンピュータが実行することで実現される。
【0029】
制御部18の有するプログラムによってコンピュータが実現する機能としては、GPSログ機能、待ち受け画面表示機能、レーダースコープ表示機能、第一車両情報表示機能、第二車両情報表示機能、GPS警報機能、レーダー波警報機能、無線警報機能などがある。
【0030】
GPSログ機能は、制御部18が1秒ごとにGPS受信器8によって検出された現在位置をその検出した時刻および速度(車速)と関連づけて位置履歴として不揮発性メモリに記憶する機能である。この位置履歴は例えばNMEA形式で記録する。
待ち受け画面表示機能は、図3(a)に示すように、GPS受信器8によって検出した自車両の速度、緯度、経度、高度を表示部5に表示する機能である。
【0031】
レーダースコープ表示機能は、図3(b)に示すように、GPS受信器8によって検出した現在位置から所定の範囲内(例えば約1kmの範囲内)にある目標物をデータベース19に記憶された位置情報に基づいて検索し、自車位置と目標物の位置との相対的な位置関係を表示部5に表示させる機能である。図3(b)中の左側の「W」が西、右側の「E」が東、上側の「N」が北の方角を示し、「W」と「E」を結ぶ左右方向の線と「N」から下へ伸びる上下方向の線との交点にあるアイコンが自車位置を示している。また「L」「RD」「P」「N」等の文字を有するアイコンが目標物の種類と位置を示す。
【0032】
第一車両情報表示機能は、図3(c)に示すように、前述したようにOBD2コネクタを介して車両から取得した車両情報のうち、エンジン負荷率の現在値に加え、スロットル開度、燃料流量、瞬間燃費の現在値と、本レーダー探知機を車両に取り付けたときから現在までに1秒おきに取得した瞬間燃費の平均値である平均燃費を表示するとともに、エンジン負荷率の大きさに応じてエンジンの形状を示す3Dオブジェクトの表示態様を変化させて表示する。
【0033】
図3(a)に示すような待ち受け画面表示機能実行中にリモコン17に設けた待受切替ボタンの押下が検出された場合、図3(b)に示すようなレーダースコープ表示機能に切り替える。また、レーダースコープ表示機能実行中にリモコン17に設けた待受切替ボタンの押下が検出された場合、図3(c)に示す第一車両情報表示機能に切り替える処理を行う。また、第一車両情報表示機能実行中にリモコン17に設けた待受切替ボタンの押下が検出された場合、第二車両情報表示機能に切り替える処理を行う。また、第二車両情報表示機能実行中にリモコン17に設けた待受切替ボタンの押下が検出された場合、待ち受け画面表示機能に切り替える処理を行う。
【0034】
制御部18は、待ち受け画面表示機能、レーダースコープ表示機能、車両情報表示機能、(以下これらの機能を総称して待受機能と称する)の実行中に、発生したイベントに応じて、GPS警報機能、レーダー波警報機能、無線警報機能等の各機能を実現する処理を実行し、当該機能の処理終了時には元の待受機能の処理に戻る。各機能の優先度は、高いほうから、レーダー波警報機能、無線警報機能、GPS警報機能の順に設定している。
【0035】
GPS警報機能は、制御部18に有するタイマーからのイベントにより所定時間間隔(1秒間隔)で実行される処理であり、データベース19に記憶された目標物の緯度経度とGPS受信器8によって検出した現在位置の緯度経度から両者の距離を求め、求めた距離が所定の接近距離(例えば500m以内)になった場合に、表示部5に図4(a)に示すようなGPS警報表示をし、スピーカ20からその旨を示す接近警告の音声を出力する処理である。
【0036】
こうした目標物としては、居眠り運転事故地点、レーダー、制限速度切替りポイント、取締エリア、検問エリア、駐禁監視エリア、Nシステム、交通監視システム、交差点監視ポイント、信号無視抑止システム、警察署、事故多発エリア、車上狙い多発エリア、急/連続カーブ(高速道)、分岐/合流ポイント(高速道)、ETCレーン事前案内(高速道)、サービスエリア(高速道)、パーキングエリア(高速道)、ハイウェイオアシス(高速道)、スマートインターチェンジ(高速道)、PA/SA内 ガソリンスタンド(高速道)、トンネル(高速道)、ハイウェイラジオ受信エリア(高速道)、県境告知、道の駅、ビューポイントパーキング等があり、これらの目標物の種別情報とその位置を示す緯度経度情報と表示部5に表示する模式図または写真のデータと音声データとを対応付けてデータベース19に記憶している。
【0037】
レーダー波警報機能は、マイクロ波受信器4によって速度測定装置(移動式レーダー等(以下、単に「レーダー」と称する))から発せられる周波数帯のマイクロ波に対応する信号が検出された場合に、表示部5に対して警報画面を表示するとともに、スピーカ20から警報音を出力する警報機能である。例えば、レーダーの発するマイクロ波の周波数帯のマイクロ波がマイクロ波受信器4によって検出された場合に、図4(b)に示すように、データベース19に記憶されたレーダーの模式図または写真を表示部5に警報画面として表示するとともに、データベース19に記憶された音声データを読み出して「レーダーです。スピード注意」という音声をスピーカ20から出力する。音声出力中は、警報ランプ6を点燈させる。
【0038】
無線警報機能は、無線受信器15によって、緊急車両等の発する無線電波を受信した場合に、その走行等の妨げとならないよう、警報を発する機能である。無線警報機能においては、取締無線、カーロケ無線、デジタル無線、特小無線、署活系無線、警察電話、警察活動無線、レッカー無線、ヘリテレ無線、消防ヘリテレ無線、消防無線、救急無線、高速道路無線、警備無線等の周波数をスキャンし、スキャンした周波数で、無線を受信した場合には、データベース19に無線種別ごとに記憶されたその周波数に対応する無線を受信した旨の模式図を警報画面として表示部5に表示するとともに、データベース19に無線種別ごとに記憶された音声データを読み出して、スピーカ20からその無線の種別を示す警報音声を出力する。たとえば、取締無線を受信した場合には「取締無線です。スピード注意」のように音声を出力する。音声出力中は、警報ランプ6を点燈させる。
【0039】
本実施形態のレーダー探知機は、これらの機能に加え、第二車両情報表示機能を備える。第二車両情報表示機能は、表示部5に図5に示すような第二車両情報表示画面を表示する機能である。第二車両情報表示画面は、画面上部から画面下部に向けて順に、1km走行換算燃料量表示領域51、エンジン負荷/車速表示領域53、アクセル開度/車速表示領域55を備える。各表示領域51・53・55は、画面左側に各表示領域の名称、右側にその単位、中心部にその算出値を表示する。
【0040】
1km走行換算燃料量表示領域51は、車両情報として取得した瞬間燃費の値から単位がcc/kmの値(1km走行換算燃料量)を算出して表示する領域である。瞬間燃費は250msごとに車両側から取得し、この算出処理と表示処理もそれに続いて行う(250msごとに行われることになる)。この瞬間燃費の単位はkm/l(キロメートル毎リットル)で取得される。したがって、この瞬間燃費の値の逆数(単位l/km(リットル毎キロメートル))を求めこれを1000倍して単位がcc/kmの値(1km走行換算燃料量)を算出して、この値を1km走行換算燃料量表示領域51の算出値として表示する。図5(a)は、車両情報として取得した瞬間燃費の値が20km/lの場合の算出値の表示例であり、1km走行換算燃料量=1/20*1000=50cc/kmと算出された表示状態である。一方、図5(b)は、車両情報として取得した瞬間燃費の値が5km/lの場合の算出値の表示例であり、1km走行換算燃料量=1/5*1000=200cc/kmと算出された状態である。
【0041】
このように、一定距離(この例では1km)走行するのに必要な燃料量(この例ではcc)を表示することで、現在の運転が1kmあたりどの程度の燃料消費量に対応する状態であるかを把握することが容易にできる。また、走行時にこの値の変化を見て運転することで、通常どのくらいの値になるのかを把握することができる。そしてこの通常値と現在の表示された値とを比較することで走行距離をどのくらい稼げているかを直感的に把握することができ、アクセルの踏み込み量などを調整して燃料を節約することが容易にできる。特にこの1kmという距離は、時速60kmで走行していると1分で移動できる距離である。そして人が徒歩で移動できる距離(運転者が徒歩で移動したことがある距離)である。したがって運転者にといってこの距離は、短すぎず長すぎず直感的に把握できる距離であり、運転者にとって把握が容易かつ適切な距離である。また、ccという単位は、例えば牛乳瓶が200ccであるといった具合に、一般生活おいて馴染み深い単位であり、人が感覚的に把握することが容易にできる単位である。
【0042】
エンジン負荷/車速表示領域53は、車両情報として取得したエンジン負荷(エンジン負荷率)の値(単位%(パーセント))と、車速の値(単位km/h(キロメートル毎時))とから、エンジン負荷率を車速で除した値であるエンジン負荷/車速の値を算出して表示する領域である。エンジン負荷と車速は250msごとに車両側から取得し、この算出処理と表示処理もそれに続いて行う(250msごとに行われることになる)。図5(a)は、車両情報として取得したエンジン負荷が10%、車速が50km/hの場合の表示例であり、エンジン負荷/車速=10/50=0.2(%h/km)と算出された表示状態である。一方、図5(b)は、車両情報として取得したエンジン負荷が60%、車速が50km/hの場合の表示例であり、エンジン負荷/車速=60/50=1.2(%h/km)と算出された表示状態である。
【0043】
このエンジン負荷/車速は、現在の運転が1kmあたりどの程度のエンジン負荷量(エンジン負荷に関するある種の値(この例ではエンジン負荷×時間))に対応するかを示す値であるから、現在のエンジン負荷を距離と関連付けて把握することができる。走行時にこの値の変化を見て運転することで、通常どのくらいの値になるのかを把握することができ、この把握した通常値と現在の表示された値とを比較することで現在の運転が走行距離をどのくらい稼げているかを直感的に把握することができる。そして、アクセルの踏み込み量などを調整して燃料を節約することが容易にできる。図3(c)のようなエンジン負荷の表示だけでも、アクセルの踏み込み量(アクセル開度)によって大きさが変化することは分かるが、同じアクセル開度でも上り坂、下り坂でエンジン負荷の大きさは変わる。例えば、惰性で走行距離を稼ぐ場合がもっとも小さい値になり、傾斜の大きい上り坂で速度を上げる場合が大きい値となる。トップから4、3にギヤチェンジした場合にも変化する。この指標を表示することで、どのギヤでこの上り坂を上ったらもっとも効率が良いかがわかる。このように、エンジン負荷/車速は、なるべくエンジンに負荷を掛けずに走行距離を稼ぎたいという指標になる。
【0044】
同様に、アクセル開度/車速表示領域55は、車両情報として取得したアクセル開度の値(単位%(パーセント))と、車速の値(単位km/h(キロメートル毎時))とから、アクセル開度を車速で除した値であるアクセル開度/車速の値を算出して表示する領域である。アクセル開度と車速は250msごとに車両側から取得し、この算出処理と表示処理もそれに続いて行う(250msごとに行われることになる)。図5(a)は、車両情報として取得したアクセル開度が5%、車速が50km/hの場合の表示例であり、アクセル開度/車速=5/50=0.1(%h/km)と算出された表示状態である。一方、図5(b)は、車両情報として取得したアクセル開度が50%、車速が50km/hの場合の表示例であり、アクセル開度/車速=50/50=1.0(%h/km)と算出された表示状態である。
【0045】
このアクセル開度/車速は、現在の運転が1kmあたりどの程度のアクセル開度量(アクセル開度に関するある種の値(この例ではアクセル開度×時間))に対応するかを示す値であるから、現在のアクセル開度を距離と関連付けて把握することができる。走行時にこの値の変化を見て運転することで、通常どのくらいの値になるのかを把握することができ、この把握した通常値と現在の表示された値とを比較することで現在の運転が走行距離をどのくらい稼げているかを直感的に把握することができる。そして、アクセルの踏み込み量などを調整して燃料を節約することが容易にできる。例えばアクセル開度を表示するだけでも、アクセルの踏み込み量(アクセル開度)によって大きさが変化することは分かるが、同じアクセル開度でも上り坂、下り坂でエンジン負荷の大きさは変わる。例えば、惰性で走行距離を稼ぐ場合がもっとも小さい値になり、傾斜の大きい上り坂で速度を上げる場合が大きい値となる。トップから4、3にギヤチェンジした場合にも変化する。この指標を表示することで、どのギヤでこの上り坂を上ったらもっとも効率が良いかがわかる。このように、アクセル開度/車速は、なるべくエンジンに負荷を掛けずに走行距離を稼ぎたいという指標になる。
【0046】
例えば、図5(a)と図5(b)が同一の道路地点上での昨日の表示画面と現在の表示画面である場合、昨日のほうが走行距離を稼げていたことになり、現在の表示画面を見た運転者は、アクセルを緩める(アクセル開度を小さくする)などして走行距離を稼げる状態にすることが容易にできる。
【0047】
本実施形態では、本発明に係る制御システムとしての本レーダー探知機は、瞬間燃費を表示する制御を行う第一車両情報表示機能を備えた制御システムであり、車両の燃料消費に関する情報である燃料情報である瞬間燃費、エンジン負荷、アクセル開度、車速を取得する。そして、これらの燃料情報に基づいてこれら燃料情報にはない単位の値であり、かつ、瞬間燃費の単位であるkm/lとは異なる単位の燃料消費に関する値である1km走行換算燃料量、エンジン負荷/車速、アクセル開度/車速を算出し、これら算出値を用いた表示をする制御を行っている。このように、通常の車両情報のデータには無い項目を算出して目的に応じた指標として利用している。このような単位の値を算出して、その算出値を表示することで、現在の運転が走行距離を稼げる運転なのかどうかが従来よりも把握しやすい制御システムを実現できる。特にこれらの車両情報はその瞬間の瞬間値を示しており時々刻々と変化する値である。したがってまさに現在の運転が走行距離を稼げる運転なのかどうかを把握することができる。
【0048】
なお、本実施形態では、図3(c)に示すような第一車両情報表示機能による表示画面と図5に示すような第二車両情報表示機能による表示画面とはリモコン17による切り替え指示に基づいて切り替える構成としたが、図3(c)に示すような第一車両情報表示機能による表示画面と図5に示すような第二車両情報表示機能による表示画面とは一定時間間隔(例えば5秒間隔)で相互に切り替えて表示するようにしてもよい。また、図3(c)に示すような第一車両情報表示機能による表示画面の各項目と図5に示すような第二車両情報表示機能による表示画面の各項目を同時に1つの画面に表示する構成としてもよい。
【0049】
本実施形態では、燃費情報を取得するための車両情報線への接続部として、車両に実装されているOBD2コネクタに接続する接続ケーブル22とコネクタ端子23を備える。OBD2コネクタは、車両のECUに接続され、各種の車両情報が出力される。この接続ケーブル22に取り付けられたコネクタ端子23と、車両本体側のOBD2コネクタとを連結することで、制御部18は、車両情報を250msごとに取得して、各値を算出して図5に示した表示を行う。そして、これら算出値は、走行距離をどのくらい稼げているかを示す値とする構成としている。具体的には、これら算出値は、一定距離あたりの値とする構成としている。本実施形態では、「一定距離あたりの値」の単位として、毎kmを用いているが、毎mや毎マイルなどとしてもよい。本実施形態では、燃料情報として瞬間燃費を取得し、算出値として一定距離走行するのに必要な燃料量を算出する構成としており、その算出値の単位は、cc/kmとする構成としている。このようにすることで、1キロメートルあたり何ccの燃料を消費するのかが表示されることとなり、どのくらい走行距離が稼げているのかを直感的に把握することができる。
【0050】
本実施形態では、エンジン負荷と車速、アクセル開度と車速といった、異なる2種類の燃費情報を取得し、これら複数の燃費情報に基づいて算出値を算出する構成としている。このようにすることで、複数の燃費情報をそれぞれ別々に表示する場合に比べ、現在の運転が走行距離を稼げる運転なのかどうかを容易に把握することができる。
【0051】
本実施形態では、燃費情報としてエンジン動作に因果関係を有する値であるエンジン負荷並びにアクセル開度及び車速を取得し、算出値としてこの因果関係を有する値を車速で除した値を算出する構成としている。車速は一定時間に走行できる距離を示すものであり、km/hで表現されている。したがって、算出値としてこの因果関係を有する値を車速で除した値の単位は、((因果関係を有する値の単位)・h/km)となって、1kmの距離あたりの量となる。そのため、距離との関係で表示された値を把握することが容易にでき、現在の運転が走行距離を稼げる運転なのかどうかを容易に把握することができる。因果関係を有する値は、アクセル開度のように原因となる値でも、エンジン負荷のように結果となる値でもよい。この因果関係を有する値から算出された距離あたりの量を見て、運転者が制御する運転を心がけることで、現在の運転をより走行距離を稼げる運転に導くことができる。
上述した各構成要素は適宜組み合わせてレーダー探知機を構成するとよい。
【0052】
本実施形態では、シガープラグコードを介して車両のシガーソケットに接続して電源供給を受け得るようにしたがOBD2コネクタから電源の供給を受けるようにしてもよい。
【0053】
また、本実施形態では、レーダー探知機の例で説明したが、車載用の各種の電子機器の機能として実施することができる。たとえば、ナビゲーション装置や、ドライブレコーダ、カーオーディオの機能として組み込んでもよい。また本実施例で記載した数値の値は、実験等を行って適宜、効果を奏する値に変更してもよい。表示部5の画面サイズなども任意のものとすることができる。また、制御部18には、各機能や警報の優先順位をリモコン17等からのユーザからの指示に基づいて設定する機能を設け、この設定された優先順位で制御部18が処理を行うように構成してもよい。
【符号の説明】
【0054】
1 ケース本体
2 ソーラーパネル
4 マイクロ波受信器
5 表示部
6 ランプ
7 赤外線通信機
8 GPS受信器
9 アダプタージャック
10 電源スイッチ
11 携帯電話機
12 メモリカードリーダ
14 メモリカード
15 無線受信器
16 リモコン受信器
17 リモコン
18 制御部
19 データベース
20 スピーカ
21 DCジャック
22 接続ケーブル
【特許請求の範囲】
【請求項1】
瞬間燃費を表示する制御を行う機能を備えた制御システムにおいて、
車両の燃料消費に関する情報である燃料情報を取得し、当該燃料情報に基づいて前記燃料情報にはない瞬間燃費とは異なる単位の燃料消費に関する値である算出値を算出し、当該算出値を用いた表示をする制御を行うこと
を特徴とする制御システム。
【請求項2】
前記燃費情報を取得するための車両情報線への接続部を有すること
を特徴とする請求項1に記載の制御システム。
【請求項3】
前記算出値は、走行距離をどのくらい稼げているかを示す値とすること
を特徴とする請求項1または2に記載の制御システム。
【請求項4】
前記算出値は、一定距離あたりの値であること
を特徴とする請求項1または2に記載の制御システム。
【請求項5】
前記燃料情報として瞬間燃費を取得し、前記算出値として一定距離走行するのに必要な燃料量を算出すること
を特徴とする請求項1〜4のいずれかに記載の制御システム。
【請求項6】
前記算出値の単位をcc/kmとすること
を特徴とする請求項5に記載の制御システム。
【請求項7】
異なる複数の種類の前記燃費情報を取得し、当該複数の燃費情報に基づいて前記算出値を算出すること
を特徴とする請求項1〜6のいずれかに記載の制御システム。
【請求項8】
前記燃費情報としてエンジン動作に因果関係を有する値と車速とを取得し、前記算出値として当該因果関係を有する値を前記車速で除した値を算出すること
を特徴とする請求項1〜7のいずれかに記載の制御システム。
【請求項9】
前記燃費情報としてエンジン負荷と車速を取得し、前記算出値として前記エンジン負荷を前記車速で除した値を算出すること
を特徴とする請求項1〜8のいずれかに記載の制御システム。
【請求項10】
前記燃費情報としてアクセル開度と車速を取得し、前記算出値としてアクセル開度を車速で除した値を算出すること
を特徴とする請求項1〜9のいずれかに記載の制御システム。
【請求項11】
請求項1〜10のいずれかに記載の制御システムの機能をコンピュータに実現させるためのプログラム。
【請求項1】
瞬間燃費を表示する制御を行う機能を備えた制御システムにおいて、
車両の燃料消費に関する情報である燃料情報を取得し、当該燃料情報に基づいて前記燃料情報にはない瞬間燃費とは異なる単位の燃料消費に関する値である算出値を算出し、当該算出値を用いた表示をする制御を行うこと
を特徴とする制御システム。
【請求項2】
前記燃費情報を取得するための車両情報線への接続部を有すること
を特徴とする請求項1に記載の制御システム。
【請求項3】
前記算出値は、走行距離をどのくらい稼げているかを示す値とすること
を特徴とする請求項1または2に記載の制御システム。
【請求項4】
前記算出値は、一定距離あたりの値であること
を特徴とする請求項1または2に記載の制御システム。
【請求項5】
前記燃料情報として瞬間燃費を取得し、前記算出値として一定距離走行するのに必要な燃料量を算出すること
を特徴とする請求項1〜4のいずれかに記載の制御システム。
【請求項6】
前記算出値の単位をcc/kmとすること
を特徴とする請求項5に記載の制御システム。
【請求項7】
異なる複数の種類の前記燃費情報を取得し、当該複数の燃費情報に基づいて前記算出値を算出すること
を特徴とする請求項1〜6のいずれかに記載の制御システム。
【請求項8】
前記燃費情報としてエンジン動作に因果関係を有する値と車速とを取得し、前記算出値として当該因果関係を有する値を前記車速で除した値を算出すること
を特徴とする請求項1〜7のいずれかに記載の制御システム。
【請求項9】
前記燃費情報としてエンジン負荷と車速を取得し、前記算出値として前記エンジン負荷を前記車速で除した値を算出すること
を特徴とする請求項1〜8のいずれかに記載の制御システム。
【請求項10】
前記燃費情報としてアクセル開度と車速を取得し、前記算出値としてアクセル開度を車速で除した値を算出すること
を特徴とする請求項1〜9のいずれかに記載の制御システム。
【請求項11】
請求項1〜10のいずれかに記載の制御システムの機能をコンピュータに実現させるためのプログラム。
【図1】


【図2】
【図4】
【図5】
【図3】
【図2】
【図4】
【図5】
【図3】
【公開番号】特開2012−207568(P2012−207568A)
【公開日】平成24年10月25日(2012.10.25)
【国際特許分類】
【出願番号】特願2011−73173(P2011−73173)
【出願日】平成23年3月29日(2011.3.29)
【出願人】(391001848)株式会社ユピテル (238)
【Fターム(参考)】
【公開日】平成24年10月25日(2012.10.25)
【国際特許分類】
【出願日】平成23年3月29日(2011.3.29)
【出願人】(391001848)株式会社ユピテル (238)
【Fターム(参考)】
[ Back to top ]