
制御システム及びプログラム
【課題】従来よりも、警報が必要な場所で的確に警報を発することができ、警報が不要な場合に警報を抑制できる制御システム等を提供する。
【解決手段】GPS警報機能に急激なスピード変化をしたポイントを、第一の処理として急ブレーキ発生ポイントとして記憶させ、第二の処理として次回このポイントに接近した場合に○○m先急ブレーキ発生ポイントです。ご注意下さい。”等の警報を行う急ブレーキ発生ポイント警報機能を付加している。
【解決手段】GPS警報機能に急激なスピード変化をしたポイントを、第一の処理として急ブレーキ発生ポイントとして記憶させ、第二の処理として次回このポイントに接近した場合に○○m先急ブレーキ発生ポイントです。ご注意下さい。”等の警報を行う急ブレーキ発生ポイント警報機能を付加している。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の現在位置と車両状態に基づいて警報の制御を行う制御システム等に関するものである。
【背景技術】
【0002】
従来から、事故多発エリア等の位置情報を予め記憶しておき、この記憶した位置に接近した場合にその位置に至る前に警報をする車載機がある。こうした車載機は、過去の事故発生件数を元に事前に登録した地点に基づいて警報を行っている。このように、過去の事故件数の多いポイントを記憶させて、そのポイントに接近すると警報してする構成では、使用者個人の固有の危険ポイントを警報出来ない。
【0003】
この点、特許文献1には、Gセンサによって現在の車両の前後方向の加速度を検出し、この加速度が所定のしきい値よりも大きかった場合に、その地点を危険地点としてRAMに記憶しておき、車両がその地点に所定基準距離以内に近づいた場合に、ディスプレイにその危険地点を表示すると共に、警報を発生してドライバに報知する構成が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2001−82966号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、単に記憶した危険地点の所定基準距離以内に近づいた場合に、警報を発生する構成とすると、例えば、反対方向から近づいた場合などにも警報が発せられてしまうこととなる。例えば、反対方向から接近した場合など、特に危険でない場合もあり、適切に警報ができないという問題があった。
【0006】
そこで、本発明は、係る問題等を解決するためになされたもので、従来よりも、警報が必要な場所で的確に警報を発することができ、警報が不要な場合に警報を抑制できる制御システム等を提供することを目的とする。
【課題を解決するための手段】
【0007】
(1)上述した目的を達成するために、本発明に係る制御システムは、車両の現在位置と第一の車両状態とを取得し、前記第一の車両状態が所定状態になった場合に、前記現在位置に基づく位置情報を記憶する第一処理と、前記記憶した位置情報の示す位置と現在位置が所定の接近関係となった場合に第二の車両状態を取得し、第二の車両状態取得時よりも後の所定のタイミングで、第三の車両状態を取得し、前記第二の車両状態と前記第三の車両状態との関係に基づいて所定の警報を行う第二処理を行うことを特徴とする。
【0008】
第一処理によって、車両の現在位置と第一の車両状態とを取得し、前記第一の車両状態が所定状態になった場合に、前記現在位置に基づく位置情報が記憶される。そして、第二処理によって、例えば第一処理で記憶した位置情報の示す位置と、前記現在位置が所定の接近関係となった場合に第二の車両状態を取得し、第二の車両状態取得時よりも後の所定のタイミングで、第三の車両状態を取得し、前記第二の車両状態と前記第三の車両状態との関係に基づいて所定の警報を行う。
【0009】
したがって、第一処理によって第一の車両状態が所定状態になった場合に記憶される現在位置に基づく位置情報の示す位置と、現在位置が所定の接近関係になった場合に、所定の警報を行う従来の構成に比べ、現在位置が所定の接近関係になった場合に第二の車両状態を取得し、第二の車両状態取得時よりも後の所定のタイミングで、第三の車両状態を取得し、第二の車両状態と第三の車両状態との関係に基づいて所定の警報が行われることから、従来よりも、警報が必要な場所で的確な警報を発することのできる制御システムを提供できる。例えば、所定の接近関係になった場合に、第二の車両状態とその後の第三の車両状態との関係が所定の条件を満たさない場合には警報を行わず、満たす場合には警報を行うようにすることで、従来よりも、警報が必要な場所で的確に警報を発することができ、警報が不要な場合に警報を抑制できる制御システムを提供できる。
【0010】
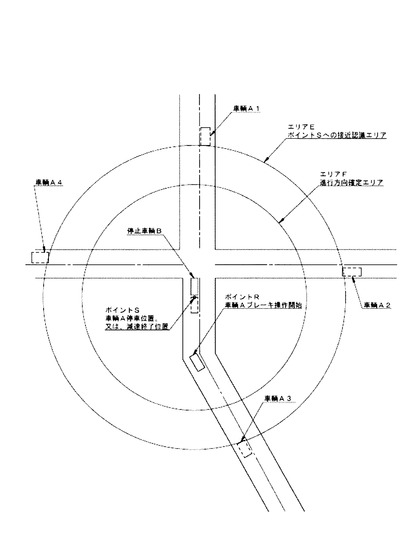
例えば、車両の現在位置の取得は、GPSによって行い、第一の車両状態は、加速度とする。そして、例えば、「第一の車両状態が所定状態になった場合」は、「加速度が所定値以上となった後、停止または所定の速度まで減速した状態になった場合」とする。また、例えば、「現在位置に基づく位置情報」は、「ポイントSの緯度経度情報」とする。「記憶した位置情報の示す位置と現在位置が所定の接近関係となった場合」は、「現在位置がエリアE(ポイントSから半径700m)の位置になった場合」とし、「第二の車両状態の取得」は「エリアE進入時の現在位置の取得」とする。そして、「第二の車両状態取得時よりも後の所定のタイミング」は、「エリアF(ポイントSから半径500m)進入時のタイミング」とし、「第三の車両状態」は、「エリアF進入時の現在位置」とする。「第二の車両状態と第三の車両状態との関係に基づいて」は、「エリアE進入時の現在位置からエリアF進入時の現在位置への方向が、エリアE進入時の現在位置からポイントSへの方向と所定角度以内(45度以内)である場合」とする。
【0011】
このようにすると、GPSによって取得した車両の現在位置と加速度を取得し、加速度が所定値以上となった後、停止または所定の速度まで減速した状態になった場合に、ポイントSの緯度経度情報を記憶する第一処理を行い、現在位置がエリアE(ポイントSから半径700m)の位置になった場合、エリアE進入時の現在位置を取得し、エリアF(ポイントSから半径500m)進入時のタイミングで、エリアF進入時の現在位置を取得し、前記エリアE進入時の現在位置からエリアF進入時の現在位置への方向が、エリアE進入時の現在位置からポイントSへの方向と所定角度以内(45度以内)である場合に所定の警報を行う第二処理を行う。このように構成すれば、反対車線を走行して記憶した位置に接近した場合に、警報される可能性が低くなるなど、従来よりも、警報が必要な場所で的確に警報を発することができ、警報が不要な場合に警報を抑制できる制御システムを提供できる。
【0012】
(2)前記第一処理として、前記第一の車両状態が所定状態になった場合に、前記現在位置に基づく位置情報を記憶する際に第一の車両の進行方向に関する情報を関連付けて記憶しておき、前記第二処理として、前記第二の車両状態と前記第三の車両状態の少なくともいずれか一方を用いて第二の車両の進行方向に関する情報を求め、前記第一の車両の進行方向に関する情報と前記第二の車両の進行方向に関する情報を用いて第一の車両の進行方向と第二の車両の進行方向とが所定の近似関係にある場合に前記所定の警報を行い、所定の近似関係にない場合に前記所定の警報を抑制する構成とするとよい。
【0013】
このようにすれば、前記記憶した位置情報の示す位置と前記現在位置が所定の接近関係となった場合に第一の車両の進行方向と第二の車両の進行方向とが所定の近似関係にある場合に前記所定の警報を行うこととなる。したがって、従来よりも、警報が必要な場所で的確に警報を発することができ、警報が不要な場合に警報を抑制できる制御システムを提供できる。
【0014】
例えば、前述の例においてさらに、「第一の車両の進行方向に関する情報」を、「ポイントR(車両のブレーキ操作開始位置)からSへの移動経路から特定した進行方向」とし、「第二の車両状態と前記第三の車両状態の少なくともいずれか一方を用いて第二の車両の進行方向に関する情報を求め」る構成として、「エリアE進入時の現在位置とエリアF進入時の現在位置から進行方向を求め」る構成とし、「所定の近似関係」として「45度以内」とし、「所定の警報を抑制」として「警報をしない」構成とするとよい。
【0015】
(3)前記現在位置に基づく位置情報を記憶する際に、その旨を示す情報を報知する制御を行うとよい。このようにすれば、運転者は現在位置に基づく位置情報を記憶したことが分かる。この記憶は、第一の車両状態が所定状態になった場合になされるので、第一の車両状態が所定状態になったことも分かる。
【0016】
「その旨を示す情報を報知する制御」としては、例えば「急ブレーキ発生ポイントに登録しました。」の音声出力などがあげられる。
【0017】
(4)前記第一の車両状態が所定状態になった場合は、所定レベル以上の急ブレーキの状態となった場合とするとよい。
【0018】
このようにすれば、過去に急ブレーキをかけた地点で、従来よりも、的確に警報を発することができ、過去に急ブレーキをかけた地点に接近しているが警報が不要な場合に警報を抑制できる制御システムを提供できる。
例えば、「第一の車両状態」を「加速度(または制動距離)」として、「所定レベル」を「減速方向の加速度が0.3G以上」とするとよい。
【0019】
(5)前記第一の処理とは異なる処理によって記憶された位置情報の示す位置である第三位置と所定の接近関係になった場合に所定の警報を行う第三の処理を行う機能を備え、前記第二の処理における所定の警報は、前記第三の処理による所定の警報を行う場合には、抑制する構成とするとよい。
【0020】
このようにすれば、例えば、第三の処理による警報と、第二の処理による警報が接近してある場合、第二の処理による警報を抑制することができる。よって同時に第二の処理による警報と第三の処理による警報がなされてわかりにくくなったり、煩わしくなったりすることを防止できる。従って、従来よりも、警報が必要な場所で的確に警報を発することができ、警報が不要な場合に警報を抑制できる。
【0021】
例えば、「前記第一の処理とは異なる処理」は、「予め事故多発地点を記憶する処理」とし、「第三位置」は「事故多発地点」とし、「所定の接近関係」は「事故多発地点エリア内」とし、「第三の処理による所定の警報」は「事故多発警報」とし、「第二の処理における所定の警報」は「急ブレーキ履歴警報」とし、「抑制すること」は「警報しないこと」とするとよい。
【0022】
「前記第一の処理とは異なる処理」は、本制御システムにて実行される処理としてもよいし、別のシステムで実行される処理としてもよい。すなわち、別のシステムで第三位置の位置情報を記憶するようにしてもよい。(6)についても同様である。
【0023】
(6)前記第一の処理とは異なる処理によって記憶された位置情報の示す位置である第三位置と所定の接近関係になった場合に所定の警報を行う第三の処理を行う機能を備え、前記第三の処理における所定の警報は、前記第二の処理による所定の警報を行う場合には、抑制する構成とするとよい。
【0024】
このようにすれば、例えば、第三の処理による警報と、第二の処理による警報が接近してある場合、第三の処理による警報を抑制することができる。よって同時に第二の処理による警報と第三の処理による警報がなされてわかりにくくなったり、煩わしくなったりすることを防止できる。従って、従来よりも、警報が必要な場所で的確に警報を発することができ、警報が不要な場合に警報を抑制できる。また、各個人に特化した警報を行うことができる。
【0025】
例えば、「前記第一の処理とは異なる処理」は、「予め事故多発地点を記憶する処理」とし、「第三位置」は「事故多発地点」とし、「所定の接近関係」は「事故多発地点エリア内」とし、「第三の処理による所定の警報」は「事故多発警報」とし、「第二の処理における所定の警報」は「急ブレーキ履歴警報」とし、「抑制すること」は「警報しないこと」とするとよい。
【0026】
(7)(1)〜(6)のいずれかに記載の制御システムとしての機能をコンピュータに実現させるためのプログラムとして構成するとよい。
【発明の効果】
【0027】
本発明によれば、従って、従来よりも、警報が必要な場所で的確に警報を発することができ、警報が不要な場合に警報を抑制できる制御システム等を提供することができる。
【図面の簡単な説明】
【0028】
【図1】本発明の好適な一実施形態であるレーダー探知機の構成を示す図である。
【図2】レーダー探知機のブロック図である。
【図3】待ち受け画面・レーダースコープ・GPS警報の表示例を示す図である。
【図4】レーダー波警報機能における警報画面の表示例を示す図である。
【図5】急ブレーキ発生ポイント警報機能を説明する図である。
【発明を実施するための形態】
【0029】
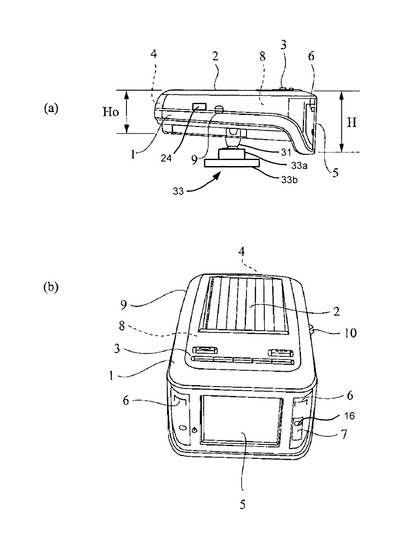
図1,図2は、本発明の制御システムとして好適な一実施形態であるレーダー探知機の構成を示している。本レーダー探知機は通常ダッシュボード上に取り付けられる。本レーダー探知機は通常ダッシュボード上に台座33のプレート33bの底面を貼りつけて固定される。台座33の上部にはボールジョイント受け部33aを設けており、ケース本体1の底面から下方に伸びる支柱部31の下端部に設けたボール部をこのボールジョイント受け部33aに挿し込み、ボール部をその可動範囲内の任意の角度・姿勢で保持させることができる。台座33は、その上面所定位置に球面状の凹部を備えており、台座33は、ゴム等の弾性変形可能で、適度な摩擦係数を有する材質から構成している。ボール部の外径と、凹部の内径とはほぼ等しく設定している。これにより、ボール部が凹部内に入り込んだ状態では、ボール部の外形状と凹部の内形状とが略符合し、ボール部は球面に沿って任意の方向に回転・移動できるようになる。そして、両者の径をほぼ一致させると共に、凹部の内形状に適度な摩擦係数を持たせることで、ボール部を任意の角度・姿勢で保持させることができる。さらに、台座33は弾性変形が可能であるので、図1に示す状態から台座33を保持しつつケース本体1を上方に引き上げる方向に付勢すると、凹部の開口部の径が広がりボール部を凹部から離脱させることができる。逆に、台座33とボール部とが分離した状態の場合、ボール部を凹部の開口部に押し当て、その状態のまま台座33に向けて押し込むように付勢すると、凹部の弾性変形によりその開口部が一旦広がり凹部内にボール部が収納される。その後は、台座33の弾性復元力により凹部の形状は元に戻り、ボール部が簡単に凹部から離脱するのが抑制される。また、台座33の底面には、粘着シートや両面接着テープや面ファスナー等の接着部材の一面が装着され、その接着部材の他の面がダッシュボード等の車室内の所定位置に取り付けられる。これにより、係る車室内の運転者から視認可能な所定位置に台座33が固定される。
【0030】
本レーダー探知機は、図1に示すように、ケース本体1の上面にソーラーパネル2及びスイッチ部3を配置し、ケース本体1の前面側(車両前方へ配置される側(フロントガラス側))の内部に速度測定装置の発する周波数帯のマイクロ波を検知するマイクロ波受信器4を配置する。一方、ケース本体1の後面側(車両後方へ配置される側(ユーザ側(ドライバー側))には、表示部5と警報ランプ6と赤外線通信機7とリモコン受信器16を配置している。また、ケース本体1の上面側内部には、GPS受信器8を配置する。さらに、ケース本体1の一方の側面には、アダプタージャック9を配置し、他方の側面には電源スイッチ10並びに図示省略するDCジャックを配置する。ケース本体の底面側内部にはバッテリを備え、このバッテリにはソーラーパネル2及びDCジャックから供給される電力を充電し、各部に電力を供給する。また、ケース本体1内には、スピーカ20も内蔵している。本実施形態では、表示部5はバックライトを有する2.4インチの小型カラードットマトリックス液晶ディスプレイであり、ケース本体1の後面側(車両後方へ配置される側(ユーザ側(ドライバー側))を表示面としている。表示部5を実装するケース本体1の後方側の高さHは、その他の部位の高さH0よりも大きくしている。
【0031】
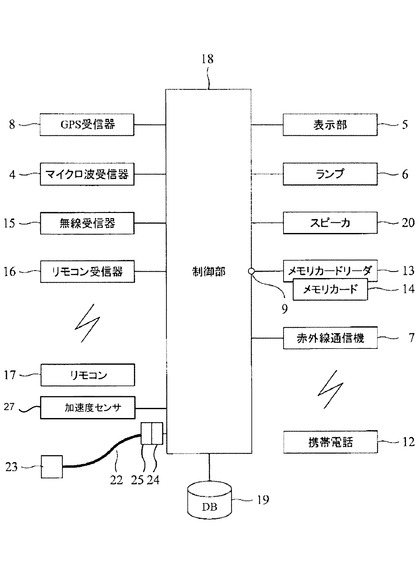
図2に示すように、赤外線通信機7は携帯電話機12等の赤外線通信機を内蔵した通信装置との間でデータの送受を行なう。アダプタージャック9は、メモリカードリーダ13を接続する端子である。アダプタージャック9にメモリカードリーダ13を接続することで、そのメモリカードリーダ13に装着されたメモリカード14に格納されたデータを内部に取り込んだり、データベース19や制御部18のメモリの内容をメモリカード14に書き込んだりすることができる。より具体的には、メモリカード14に格納されたデータに、新規な目標物の情報(経度・緯度を含む位置情報,種別情報等)などの更新情報がある場合、その更新情報を制御部18が本レーダー探知機に内蔵されるデータベース19に格納(ダウンロード)し、データベース19のデータを更新する。なお、メモリカードリーダ13の機能は、本体ケース1内に内蔵するように構成してもよい。
【0032】
データベース19は、制御部18のマイコン内あるいはマイコンに外付けした不揮発性メモリ(たとえばEEPROM)である。データベース19には、出荷時に一定の目標物に関する情報を登録しており、その後に追加された目標物についてのデータ等は上記のようにしてデータ更新することができる。また、データ更新は、赤外線通信機7を介して行なうこともできる。
【0033】
DCジャックは、図示省略のシガープラグコードを接続するためのもので、そのシガープラグコードを介して車両のシガーソケットに接続して電源供給を受け得るようにする。
【0034】
無線受信器15は、飛来する所定周波数の無線を受信する。リモコン受信器16は、赤外線によりリモコン(携帯機:子機)17とデータ通信をし、本装置に対する各種の設定を行なう。また、スイッチ部3も制御部18に接続され(図示省略)、リモコン17と同様の設定を行えるようになっている。リモコン17には、待受切替ボタン、設定ボタン、選択ボタン、取消ボタン、決定ボタン、リセットボタン、上下左右の十字ボタンを備えている。
【0035】
さらに本実施形態のレーダー探知機は、図2に示すように車両に実装されているOBD−II(IIはローマ数字の「2」であり、以下「OBD−II」を「OBD2」と記す)コネクタに接続する接続ケーブル22を備え、この接続ケーブル22の先端には、車両のOBD2コネクタに着脱自在に装着できるコネクタ端子23が取り付けられている。OBD2コネクタは、故障診断コネクタとも称され、車両のECUに接続され、各種の車両情報が出力される。さらに本実施形態では、接続ケーブル22の他端には、レーダー探知機のケース本体1の側面に設けたソケット口24と接続するためのコネクタ端子25を設けており、レーダー探知機に対しても接続ケーブル22を着脱できるようにしている。もちろん、接続ケーブル22をレーダー探知機に直接接続するようにしても良い。
【0036】
そこで、この接続ケーブル22に取り付けられたコネクタ端子23と、車両本体側のOBD2コネクタとを連結することで、制御部18は、各種の車両情報を一秒おきに取得する。この車両情報としては、車速、エンジン回転数、エンジン負荷率、スロットル開度、燃料流量、瞬間燃費、吸入空気量(MAF)、インジェクション開時間、残燃料量、アクセル開度、ウインカー情報(左右のウインカーの動作(ON/OFF))、ブレーキ開度、ハンドルの回転操舵角情報等がある。
加速度センサ27はケース本体1内に備え、車両の前後、左右、上下の加速度を検出するセンサである。
【0037】
制御部18は、CPU,ROM,RAM,I/O等を備えるマイコンであり、上記の各種の入力機器から入力される情報に基づき所定の処理を実行し、上記の各種の出力機器を利用して所定の警報・メッセージや情報を出力する。なお、これらの基本構成は、基本的に従来のものと同様のものを用いることができる。
【0038】
本実施形態のレーダー探知機における機能は、制御部18に有するコンピュータが実行するプログラムとして制御部18のEEPROM上に格納され、これを制御部18に有するコンピュータが実行することで実現される。
【0039】
制御部18の有するプログラムによってコンピュータが実現する機能としては、GPSログ機能、待ち受け画面表示機能、レーダースコープ表示機能、車両情報表示機能、GPS警報機能、レーダー波警報機能、無線警報機能などがある。
【0040】
GPSログ機能は、制御部18が1秒ごとにGPS受信器8によって検出された現在位置をその検出した時刻および速度(車速)と関連づけて位置履歴としてデータベース19に記憶する機能である。この位置履歴は例えばNMEA形式で記録する。
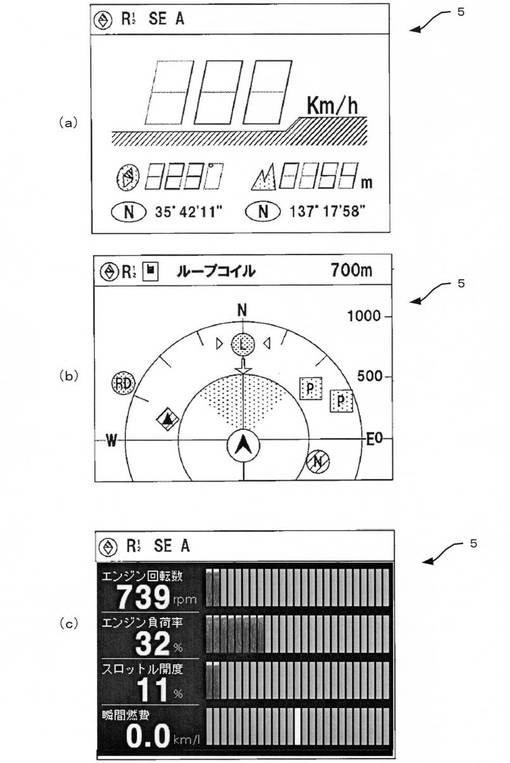
待ち受け画面表示機能は、図3(a)に示すように、GPS受信器8によって検出した自車両の速度、緯度、経度、高度を表示部5に表示する機能である。
【0041】
レーダースコープ表示機能は、図3(b)に示すように、GPS受信器8によって検出した現在位置から所定の範囲内(例えば約1kmの範囲内)にある目標物をデータベース19に記憶された位置情報に基づいて検索し、自車位置と目標物の位置との相対的な位置関係を表示部5に表示させる機能である。図3(b)中の左側の「W」が西、右側の「E」が東、上側の「N」が北の方角を示し、「W」と「E」を結ぶ左右方向の線と「N」から下へ伸びる上下方向の線との交点にあるアイコンが自車位置を示している。また「L」「RD」「P」「N」等の文字を有するアイコンが目標物の種類と位置を示す。
【0042】
車両情報表示機能は、図3(c)に示すように、前述したようにOBD2コネクタを介して車両から取得した車両情報のうち、エンジン負荷率の現在値に加え、スロットル開度、燃料流量、瞬間燃費の現在値と、本レーダー探知機を車両に取り付けたときから現在までに1秒おきに取得した瞬間燃費の平均値である平均燃費を表示するとともに、エンジン負荷率の大きさに応じてエンジンの形状を示す3Dオブジェクトの表示態様を変化させて表示する。
【0043】
図3(a)に示すような待ち受け画面表示機能実行中にリモコン17に設けた待受切替ボタンの押下が検出された場合、図3(b)に示すようなレーダースコープ表示機能に切り替える。また、レーダースコープ表示機能実行中にリモコン17に設けた待受切替ボタンの押下が検出された場合、図3(c)に示す車両情報表示機能に切り替える処理を行う。また、車両情報表示機能実行中にリモコン17に設けた待受切替ボタンの押下が検出された場合、待ち受け画面表示機能に切り替える処理を行う。
【0044】
制御部18は、待ち受け画面表示機能、レーダースコープ表示機能、車両情報表示機能、(以下これらの機能を総称して待受機能と称する)の実行中に、発生したイベントに応じて、GPS警報機能、レーダー波警報機能、無線警報機能等の各機能を実現する処理を実行し、当該機能の処理終了時には元の待受機能の処理に戻る。各機能の優先度は、高いほうから、レーダー波警報機能、無線警報機能、GPS警報機能の順に設定している。
【0045】
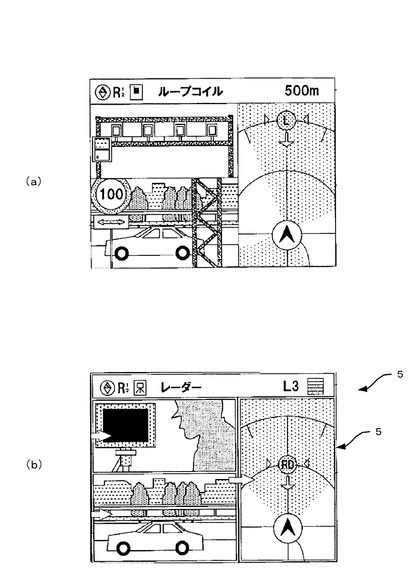
GPS警報機能は、制御部18に有するタイマーからのイベントにより所定時間間隔(1秒間隔)で実行される処理であり、データベース19に記憶された目標物の緯度経度とGPS受信器8によって検出した現在位置の緯度経度から両者の距離を求め、求めた距離が所定の接近距離(例えば500m以内)になった場合に、表示部5に図4(a)に示すようなGPS警報表示をし、スピーカ20からその旨を示す接近警告の音声を出力する処理である。
【0046】
こうした目標物としては、居眠り運転事故地点、レーダー、制限速度切替りポイント、取締エリア、検問エリア、駐禁監視エリア、Nシステム、交通監視システム、交差点監視ポイント、信号無視抑止システム、警察署、事故多発エリア、車上狙い多発エリア、急/連続カーブ(高速道)、分岐/合流ポイント(高速道)、ETCレーン事前案内(高速道)、サービスエリア(高速道)、パーキングエリア(高速道)、ハイウェイオアシス(高速道)、スマートインターチェンジ(高速道)、PA/SA内 ガソリンスタンド(高速道)、トンネル(高速道)、ハイウェイラジオ受信エリア(高速道)、県境告知、道の駅、ビューポイントパーキング等があり、これらの目標物の種別情報とその位置を示す緯度経度情報と表示部5に表示する模式図または写真のデータと音声データとを対応付けてデータベース19に記憶している。
【0047】
レーダー波警報機能は、マイクロ波受信器4によって速度測定装置(移動式レーダー等(以下、単に「レーダー」と称する))から発せられる周波数帯のマイクロ波に対応する信号が検出された場合に、表示部5に対して警報画面を表示するとともに、スピーカ20から警報音を出力する警報機能である。例えば、レーダーの発するマイクロ波の周波数帯のマイクロ波がマイクロ波受信器4によって検出された場合に、図4(b)に示すように、データベース19に記憶されたレーダーの模式図または写真を表示部5に警報画面として表示するとともに、データベース19に記憶された音声データを読み出して「レーダーです。スピード注意」という音声をスピーカ20から出力する。音声出力中は、警報ランプ6を点燈させる。
【0048】
無線警報機能は、無線受信器15によって、緊急車両等の発する無線電波を受信した場合に、その走行等の妨げとならないよう、警報を発する機能である。無線警報機能においては、取締無線、カーロケ無線、デジタル無線、特小無線、署活系無線、警察電話、警察活動無線、レッカー無線、ヘリテレ無線、消防ヘリテレ無線、消防無線、救急無線、高速道路無線、警備無線等の周波数をスキャンし、スキャンした周波数で、無線を受信した場合には、データベース19に無線種別ごとに記憶されたその周波数に対応する無線を受信した旨の模式図を警報画面として表示部5に表示するとともに、データベース19に無線種別ごとに記憶された音声データを読み出して、スピーカ20からその無線の種別を示す警報音声を出力する。たとえば、取締無線を受信した場合には「取締無線です。スピード注意」のように音声を出力する。音声出力中は、警報ランプ6を点燈させる。
【0049】
本実施形態のレーダー探知機は、GPS警報機能に急激なスピード変化をしたポイントを、第一の処理として急ブレーキ発生ポイントとして記憶させ、第二の処理として次回このポイントに接近した場合に「○○m先急ブレーキ発生ポイントです。ご注意下さい。」等の警報を行う急ブレーキ発生ポイント警報機能を付加している。具体的には次のとおりである。
【0050】
急ブレーキ発生ポイントは、加速度センサ27によって0.2G以上の前後方向の減速方向の加速度が検出された位置からGPS受信器8によって検出した車両の速度が0になった位置までの距離が、制動距離に所定の率(以下安全率)を乗じた距離以内の場合に、その車両の速度が0になったポイントとしている。0.2G以上の前後方向の減速方向の加速度が検出された位置から速度が0になった位置までの距離が、制動距離に所定の率(以下安全率)を乗じた距離を超える場合には急ブレーキ発生ポイントとは判定せずにポイントの記憶は行わない。
【0051】
なお、制動距離は、一定の速度からフルブレーキを掛けた時の距離を求めるものである。具体的には以下のように定義している。
制動距離
1.時速40km/h時までは、速度の二乗/100 → 40km/hなら16m
2.時速40km/hを超えた場合は上記1.の20%減算 → 50km/hなら20m
3.時速40km/hを下回る場合は上記1.に2mを加算 → 30km/hなら11m
【0052】
この様な急ブレーキ発生ポイントをデータベース19に記憶させていき、次にこのポイントに同じ方向から接近した時に警報を行う。これにより、この先に危険なエリアが存在する事を事前に知る事が出来る。
【0053】
急ブレーキポイントの記憶においては、急減速開始位置と停止位置の履歴から進行方向を特定し反対車線では急ブレーキ発生ポイント警報を行わない設定とする。また、データベース19に記憶された事故多発エリアと、急ブレーキ発生ポイントが重複する場所は、急ブレーキ発生ポイント警報を行わないようにする。
【0054】
例えば、進行方向(西→東)へ60km/hで進行中、急ブレーキを掛けて30m先で停止した。上記制動距離の演算式に当てはめて計算すると、制動距離は28.8mであるが、ある一定の安全率を加算した距離以内であれば、急ブレーキ発生ポイントとして記憶させる。この際に、制動開始ポイントと停止ポイントの推移から進行方向を特定して同時に記憶させる。安全率を15%に設定した場合は、28.8×(1+0.15)=33.12mとなり、実際の制動距離は、この値以内なので、急ブレーキ発生ポイントと判定する。安全率は、任意に設定しても良いし、実験等により設定しても良い。
【0055】
2回目に同じポイントに接近した場合、例えば300m手前から200m手前の位置の推移から進行方向を特定する。前回と同じ進行方向であれば、警報を発し、異なっていれば、警報しない。
【0056】
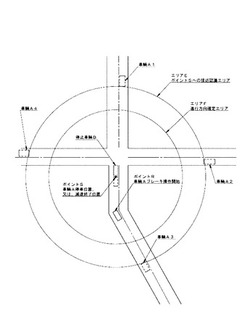
別の例を用いて図5を参照してより詳細な処理について説明する。車輌Aが停車中の車輌BをポイントRで発見して急ブレーキを掛けてポイントSで停止又は減速を終了した場合、前述のようにして急ブレーキ発生ポイントか否かを判定し、急ブレーキ発生ポイントと判定すればポイントSを地点登録し、ポイントSから半径300m範囲のポイントSに至るまでの移動経路を、GPSログ機能によって記録された位置履歴からコピーして、ポイントSを地点(緯度経度)と関連づけて急ブレーキ発生ポイントとしてデータベース19に記憶させる。このとき、「急ブレ−キ発生ポイントに登録しました。」という音声をスピーカ20から出力する。
【0057】
車輌Aの現在位置がデータベース19に地点登録された急ブレーキ発生ポイントであるポイントSから半径300mの位置のエリアEでポイントSへの接近を認識し、このエリアEの位置から、ポイントSから半径200mの位置のエリアFまでの今回のGPSログ機能によって記録された位置履歴と、ポイントSに関連付けてデータベース19に記憶された位置履歴との間に所定以上の相関関係がある場合(例えば今回のGPSログ機能によって記録された位置履歴を結んだ曲線を幅20mとした曲線の中にポイントSに関連付けてデータベース19に記憶された位置履歴の位置が90%以上存在する場合)、エリアF内に進入した段階で警報を行う。例えば、「200m先、急ブレーキ発生ポイントです。ご注意下さい。」という音声をスピーカ20から出力する。このようにして、車輌A3の方向からポイントSへ向かった場合のみ、警報が報知される。
【0058】
このように加速度が所定値以上となった後、停止した状態になった場合に、前述した条件でポイントSの緯度経度情報を記憶する(地点登録する)第一処理を行い、現在位置がエリアF(ポイントSから半径200m)の位置になった場合、エリアF進入時の現在位置と、エリアE(ポイントSから半径300m)進入時の現在位置を含む位置履歴に基づく経路を取得し、今回のエリアE進入時の現在位置からエリアF進入時の現在位置への経路と、所定以上の相関のある場合に「200m先、急ブレーキ発生ポイントです。ご注意下さい。」という音声をスピーカ20から出力する警報を行う第二処理を行う。このように構成によって、反対車線を走行して記憶した位置に接近した場合に、警報される可能性が低くなるなど、従来よりも、警報が必要な場所で的確に警報を発することができ、警報が不要な場合に警報を抑制できるレーダー探知機を提供できる。
【0059】
本実施形態では、このように加速度が所定値以上となった後、停止した状態になった場合に、前述した条件でポイントSの緯度経度情報を記憶する(地点登録する)第一処理を行う際に、ポイントSに至るポイントSから半径300m範囲の移動経路をGPSログ機能によって記録された位置履歴からコピーして同時に関連づけて記憶しておき、第二処理として、現在位置がエリアF(ポイントSから半径200m)の位置になった場合、エリアF進入時の現在位置と、エリアE(ポイントSから半径300m)進入時の現在位置を含む位置履歴に基づく経路を取得し、今回のエリアE進入時の現在位置からエリアF進入時の現在位置への経路と、所定以上の相関のある場合に「200m先、急ブレーキ発生ポイントです。ご注意下さい。」という音声をスピーカ20から出力する警報を行う第二処理を行う。このように両者の進行方向が所定の近似関係にある場合にこの警報を行い、所定の近似関係にない場合にこの警報を行わない構成としている。
そのため、従来よりも、警報が必要な場所で的確に警報を発することができ、警報が不要な場合に警報を抑制できる制御システムを提供できる。
【0060】
本実施形態では、ポイントSを記憶した際に、「急ブレーキ発生ポイントに登録しました。」という音声出力を行う。よって、運転者はポイントSが記憶されたことが分かる。また、この音声により、ポイントSに至るまでに急ブレーキをかけたことが改めて認識される。
【0061】
本実施形態では、データベース19に記憶された事故多発エリアと、急ブレーキ発生ポイントが重複する場所は、急ブレーキ発生ポイント警報を行わないようにしたが、逆にデータベース19に記憶された事故多発エリアと、急ブレーキ発生ポイントが重複する場所は、事故多発エリアの警報を行わないようにしてもよい。いずれの構成においても、警報が重複されてなされてわかりにくくなったり、煩わしくなったりすることを防止できる。従って、従来よりも、警報が必要な場所で的確に警報を発することができ、警報が不要な場合に警報を抑制できる。
【0062】
なお、本実施形態のように急激なスピード変化をしたポイントは、移動距離に対してスピードが急激に変化したポイントとするとよい。また、急激なスピード変化以外に、加速度センサにより、一定以上の加速度を検出した場合に、このポイントを急ブレーキ発生ポイント(例えば図5のポイントS)として記憶するようにしても良い。
安全率は、任意で設定しても良いし、実験によって決めても良い。
【0063】
本実施形態では、停止した位置をポイントSとしたが所定の速度まで減速した位置をポイントSとしてもよい。
上述した各構成要素は適宜組み合わせてレーダー探知機を構成するとよい。例えば、「課題を解決するための手段」の項に記載した例で構成してもよい。
【0064】
本実施形態では、シガープラグコードを介して車両のシガーソケットに接続して電源供給を受け得るようにしたがOBD2コネクタから電源の供給を受けるようにしてもよい。
【0065】
本実施形態では、急ブレーキ発生ポイントは、加速度センサ27によって0.2G以上の前後方向の減速方向の加速度が検出された位置からGPS受信器8によって検出した車両の速度が0になった位置までの距離が、制動距離に所定の安全率を乗じた距離以内の場合に、その車両の速度が0になったポイントとしているがこれに限らない。例えば、「加速度センサ27によって0.2G以上の前後方向の減速方向の加速度が検出された位置」に代えて、「OBD2コネクタ等から、車両のブレーキの状態を取得して、ブレーキング状態(ブレーキを掛けている状態)が検出された位置」としてもよい。また「車両の速度が0になった位置」に代えて、ブレーキング状態でなくなった位置としてもよい。
【0066】
また、本実施形態では、レーダー探知機の例で説明したが、車載用の各種の電子機器の機能として実施することができる。たとえば、ナビゲーション装置や、ドライブレコーダ、カーオーディオの機能として組み込んでもよい。また本実施例で記載した数値の値は、実験等を行って適宜、効果を奏する値に変更してもよい。表示部5の画面サイズなども任意のものとすることができる。また、制御部18には、各機能や警報の優先順位をリモコン17等からのユーザからの指示に基づいて設定する機能を設け、この設定された優先順位で制御部18が処理を行うように構成してもよい。
【0067】
さらに、上述した実施形態では、装置内に各種の情報を記憶したデータベース19を備え、制御部18は係るデータベース19にアクセスして必要な情報を読み出し、各種の処理をしたが、本発明はこれに限ることはない。すなわち、データベース19に登録する情報の一部または全部をサーバに登録しておく。そして、レーダー探知機その他の電子機器・装置は、係るサーバと通信する機能を備え、制御部18は、適宜サーバにアクセスし、必要な情報を取得して処理を実行するシステムとしてもよい。さらには、制御部18の機能の少なくとも一部をサーバにおき、当該機能をサーバで実行し、ユーザが持つ電子機器は、その実行結果を取得するようなシステムとしても良い。
【符号の説明】
【0068】
1 ケース本体
2 ソーラーパネル
4 マイクロ波受信器
5 表示部
6 ランプ
7 赤外線通信機
8 GPS受信器
9 アダプタージャック
10 電源スイッチ
11 携帯電話機
12 メモリカードリーダ
14 メモリカード
15 無線受信器
16 リモコン受信器
17 リモコン
18 制御部
19 データベース
20 スピーカ
21 DCジャック
22 接続ケーブル
27 加速度センサ
【技術分野】
【0001】
本発明は、車両の現在位置と車両状態に基づいて警報の制御を行う制御システム等に関するものである。
【背景技術】
【0002】
従来から、事故多発エリア等の位置情報を予め記憶しておき、この記憶した位置に接近した場合にその位置に至る前に警報をする車載機がある。こうした車載機は、過去の事故発生件数を元に事前に登録した地点に基づいて警報を行っている。このように、過去の事故件数の多いポイントを記憶させて、そのポイントに接近すると警報してする構成では、使用者個人の固有の危険ポイントを警報出来ない。
【0003】
この点、特許文献1には、Gセンサによって現在の車両の前後方向の加速度を検出し、この加速度が所定のしきい値よりも大きかった場合に、その地点を危険地点としてRAMに記憶しておき、車両がその地点に所定基準距離以内に近づいた場合に、ディスプレイにその危険地点を表示すると共に、警報を発生してドライバに報知する構成が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2001−82966号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、単に記憶した危険地点の所定基準距離以内に近づいた場合に、警報を発生する構成とすると、例えば、反対方向から近づいた場合などにも警報が発せられてしまうこととなる。例えば、反対方向から接近した場合など、特に危険でない場合もあり、適切に警報ができないという問題があった。
【0006】
そこで、本発明は、係る問題等を解決するためになされたもので、従来よりも、警報が必要な場所で的確に警報を発することができ、警報が不要な場合に警報を抑制できる制御システム等を提供することを目的とする。
【課題を解決するための手段】
【0007】
(1)上述した目的を達成するために、本発明に係る制御システムは、車両の現在位置と第一の車両状態とを取得し、前記第一の車両状態が所定状態になった場合に、前記現在位置に基づく位置情報を記憶する第一処理と、前記記憶した位置情報の示す位置と現在位置が所定の接近関係となった場合に第二の車両状態を取得し、第二の車両状態取得時よりも後の所定のタイミングで、第三の車両状態を取得し、前記第二の車両状態と前記第三の車両状態との関係に基づいて所定の警報を行う第二処理を行うことを特徴とする。
【0008】
第一処理によって、車両の現在位置と第一の車両状態とを取得し、前記第一の車両状態が所定状態になった場合に、前記現在位置に基づく位置情報が記憶される。そして、第二処理によって、例えば第一処理で記憶した位置情報の示す位置と、前記現在位置が所定の接近関係となった場合に第二の車両状態を取得し、第二の車両状態取得時よりも後の所定のタイミングで、第三の車両状態を取得し、前記第二の車両状態と前記第三の車両状態との関係に基づいて所定の警報を行う。
【0009】
したがって、第一処理によって第一の車両状態が所定状態になった場合に記憶される現在位置に基づく位置情報の示す位置と、現在位置が所定の接近関係になった場合に、所定の警報を行う従来の構成に比べ、現在位置が所定の接近関係になった場合に第二の車両状態を取得し、第二の車両状態取得時よりも後の所定のタイミングで、第三の車両状態を取得し、第二の車両状態と第三の車両状態との関係に基づいて所定の警報が行われることから、従来よりも、警報が必要な場所で的確な警報を発することのできる制御システムを提供できる。例えば、所定の接近関係になった場合に、第二の車両状態とその後の第三の車両状態との関係が所定の条件を満たさない場合には警報を行わず、満たす場合には警報を行うようにすることで、従来よりも、警報が必要な場所で的確に警報を発することができ、警報が不要な場合に警報を抑制できる制御システムを提供できる。
【0010】
例えば、車両の現在位置の取得は、GPSによって行い、第一の車両状態は、加速度とする。そして、例えば、「第一の車両状態が所定状態になった場合」は、「加速度が所定値以上となった後、停止または所定の速度まで減速した状態になった場合」とする。また、例えば、「現在位置に基づく位置情報」は、「ポイントSの緯度経度情報」とする。「記憶した位置情報の示す位置と現在位置が所定の接近関係となった場合」は、「現在位置がエリアE(ポイントSから半径700m)の位置になった場合」とし、「第二の車両状態の取得」は「エリアE進入時の現在位置の取得」とする。そして、「第二の車両状態取得時よりも後の所定のタイミング」は、「エリアF(ポイントSから半径500m)進入時のタイミング」とし、「第三の車両状態」は、「エリアF進入時の現在位置」とする。「第二の車両状態と第三の車両状態との関係に基づいて」は、「エリアE進入時の現在位置からエリアF進入時の現在位置への方向が、エリアE進入時の現在位置からポイントSへの方向と所定角度以内(45度以内)である場合」とする。
【0011】
このようにすると、GPSによって取得した車両の現在位置と加速度を取得し、加速度が所定値以上となった後、停止または所定の速度まで減速した状態になった場合に、ポイントSの緯度経度情報を記憶する第一処理を行い、現在位置がエリアE(ポイントSから半径700m)の位置になった場合、エリアE進入時の現在位置を取得し、エリアF(ポイントSから半径500m)進入時のタイミングで、エリアF進入時の現在位置を取得し、前記エリアE進入時の現在位置からエリアF進入時の現在位置への方向が、エリアE進入時の現在位置からポイントSへの方向と所定角度以内(45度以内)である場合に所定の警報を行う第二処理を行う。このように構成すれば、反対車線を走行して記憶した位置に接近した場合に、警報される可能性が低くなるなど、従来よりも、警報が必要な場所で的確に警報を発することができ、警報が不要な場合に警報を抑制できる制御システムを提供できる。
【0012】
(2)前記第一処理として、前記第一の車両状態が所定状態になった場合に、前記現在位置に基づく位置情報を記憶する際に第一の車両の進行方向に関する情報を関連付けて記憶しておき、前記第二処理として、前記第二の車両状態と前記第三の車両状態の少なくともいずれか一方を用いて第二の車両の進行方向に関する情報を求め、前記第一の車両の進行方向に関する情報と前記第二の車両の進行方向に関する情報を用いて第一の車両の進行方向と第二の車両の進行方向とが所定の近似関係にある場合に前記所定の警報を行い、所定の近似関係にない場合に前記所定の警報を抑制する構成とするとよい。
【0013】
このようにすれば、前記記憶した位置情報の示す位置と前記現在位置が所定の接近関係となった場合に第一の車両の進行方向と第二の車両の進行方向とが所定の近似関係にある場合に前記所定の警報を行うこととなる。したがって、従来よりも、警報が必要な場所で的確に警報を発することができ、警報が不要な場合に警報を抑制できる制御システムを提供できる。
【0014】
例えば、前述の例においてさらに、「第一の車両の進行方向に関する情報」を、「ポイントR(車両のブレーキ操作開始位置)からSへの移動経路から特定した進行方向」とし、「第二の車両状態と前記第三の車両状態の少なくともいずれか一方を用いて第二の車両の進行方向に関する情報を求め」る構成として、「エリアE進入時の現在位置とエリアF進入時の現在位置から進行方向を求め」る構成とし、「所定の近似関係」として「45度以内」とし、「所定の警報を抑制」として「警報をしない」構成とするとよい。
【0015】
(3)前記現在位置に基づく位置情報を記憶する際に、その旨を示す情報を報知する制御を行うとよい。このようにすれば、運転者は現在位置に基づく位置情報を記憶したことが分かる。この記憶は、第一の車両状態が所定状態になった場合になされるので、第一の車両状態が所定状態になったことも分かる。
【0016】
「その旨を示す情報を報知する制御」としては、例えば「急ブレーキ発生ポイントに登録しました。」の音声出力などがあげられる。
【0017】
(4)前記第一の車両状態が所定状態になった場合は、所定レベル以上の急ブレーキの状態となった場合とするとよい。
【0018】
このようにすれば、過去に急ブレーキをかけた地点で、従来よりも、的確に警報を発することができ、過去に急ブレーキをかけた地点に接近しているが警報が不要な場合に警報を抑制できる制御システムを提供できる。
例えば、「第一の車両状態」を「加速度(または制動距離)」として、「所定レベル」を「減速方向の加速度が0.3G以上」とするとよい。
【0019】
(5)前記第一の処理とは異なる処理によって記憶された位置情報の示す位置である第三位置と所定の接近関係になった場合に所定の警報を行う第三の処理を行う機能を備え、前記第二の処理における所定の警報は、前記第三の処理による所定の警報を行う場合には、抑制する構成とするとよい。
【0020】
このようにすれば、例えば、第三の処理による警報と、第二の処理による警報が接近してある場合、第二の処理による警報を抑制することができる。よって同時に第二の処理による警報と第三の処理による警報がなされてわかりにくくなったり、煩わしくなったりすることを防止できる。従って、従来よりも、警報が必要な場所で的確に警報を発することができ、警報が不要な場合に警報を抑制できる。
【0021】
例えば、「前記第一の処理とは異なる処理」は、「予め事故多発地点を記憶する処理」とし、「第三位置」は「事故多発地点」とし、「所定の接近関係」は「事故多発地点エリア内」とし、「第三の処理による所定の警報」は「事故多発警報」とし、「第二の処理における所定の警報」は「急ブレーキ履歴警報」とし、「抑制すること」は「警報しないこと」とするとよい。
【0022】
「前記第一の処理とは異なる処理」は、本制御システムにて実行される処理としてもよいし、別のシステムで実行される処理としてもよい。すなわち、別のシステムで第三位置の位置情報を記憶するようにしてもよい。(6)についても同様である。
【0023】
(6)前記第一の処理とは異なる処理によって記憶された位置情報の示す位置である第三位置と所定の接近関係になった場合に所定の警報を行う第三の処理を行う機能を備え、前記第三の処理における所定の警報は、前記第二の処理による所定の警報を行う場合には、抑制する構成とするとよい。
【0024】
このようにすれば、例えば、第三の処理による警報と、第二の処理による警報が接近してある場合、第三の処理による警報を抑制することができる。よって同時に第二の処理による警報と第三の処理による警報がなされてわかりにくくなったり、煩わしくなったりすることを防止できる。従って、従来よりも、警報が必要な場所で的確に警報を発することができ、警報が不要な場合に警報を抑制できる。また、各個人に特化した警報を行うことができる。
【0025】
例えば、「前記第一の処理とは異なる処理」は、「予め事故多発地点を記憶する処理」とし、「第三位置」は「事故多発地点」とし、「所定の接近関係」は「事故多発地点エリア内」とし、「第三の処理による所定の警報」は「事故多発警報」とし、「第二の処理における所定の警報」は「急ブレーキ履歴警報」とし、「抑制すること」は「警報しないこと」とするとよい。
【0026】
(7)(1)〜(6)のいずれかに記載の制御システムとしての機能をコンピュータに実現させるためのプログラムとして構成するとよい。
【発明の効果】
【0027】
本発明によれば、従って、従来よりも、警報が必要な場所で的確に警報を発することができ、警報が不要な場合に警報を抑制できる制御システム等を提供することができる。
【図面の簡単な説明】
【0028】
【図1】本発明の好適な一実施形態であるレーダー探知機の構成を示す図である。
【図2】レーダー探知機のブロック図である。
【図3】待ち受け画面・レーダースコープ・GPS警報の表示例を示す図である。
【図4】レーダー波警報機能における警報画面の表示例を示す図である。
【図5】急ブレーキ発生ポイント警報機能を説明する図である。
【発明を実施するための形態】
【0029】
図1,図2は、本発明の制御システムとして好適な一実施形態であるレーダー探知機の構成を示している。本レーダー探知機は通常ダッシュボード上に取り付けられる。本レーダー探知機は通常ダッシュボード上に台座33のプレート33bの底面を貼りつけて固定される。台座33の上部にはボールジョイント受け部33aを設けており、ケース本体1の底面から下方に伸びる支柱部31の下端部に設けたボール部をこのボールジョイント受け部33aに挿し込み、ボール部をその可動範囲内の任意の角度・姿勢で保持させることができる。台座33は、その上面所定位置に球面状の凹部を備えており、台座33は、ゴム等の弾性変形可能で、適度な摩擦係数を有する材質から構成している。ボール部の外径と、凹部の内径とはほぼ等しく設定している。これにより、ボール部が凹部内に入り込んだ状態では、ボール部の外形状と凹部の内形状とが略符合し、ボール部は球面に沿って任意の方向に回転・移動できるようになる。そして、両者の径をほぼ一致させると共に、凹部の内形状に適度な摩擦係数を持たせることで、ボール部を任意の角度・姿勢で保持させることができる。さらに、台座33は弾性変形が可能であるので、図1に示す状態から台座33を保持しつつケース本体1を上方に引き上げる方向に付勢すると、凹部の開口部の径が広がりボール部を凹部から離脱させることができる。逆に、台座33とボール部とが分離した状態の場合、ボール部を凹部の開口部に押し当て、その状態のまま台座33に向けて押し込むように付勢すると、凹部の弾性変形によりその開口部が一旦広がり凹部内にボール部が収納される。その後は、台座33の弾性復元力により凹部の形状は元に戻り、ボール部が簡単に凹部から離脱するのが抑制される。また、台座33の底面には、粘着シートや両面接着テープや面ファスナー等の接着部材の一面が装着され、その接着部材の他の面がダッシュボード等の車室内の所定位置に取り付けられる。これにより、係る車室内の運転者から視認可能な所定位置に台座33が固定される。
【0030】
本レーダー探知機は、図1に示すように、ケース本体1の上面にソーラーパネル2及びスイッチ部3を配置し、ケース本体1の前面側(車両前方へ配置される側(フロントガラス側))の内部に速度測定装置の発する周波数帯のマイクロ波を検知するマイクロ波受信器4を配置する。一方、ケース本体1の後面側(車両後方へ配置される側(ユーザ側(ドライバー側))には、表示部5と警報ランプ6と赤外線通信機7とリモコン受信器16を配置している。また、ケース本体1の上面側内部には、GPS受信器8を配置する。さらに、ケース本体1の一方の側面には、アダプタージャック9を配置し、他方の側面には電源スイッチ10並びに図示省略するDCジャックを配置する。ケース本体の底面側内部にはバッテリを備え、このバッテリにはソーラーパネル2及びDCジャックから供給される電力を充電し、各部に電力を供給する。また、ケース本体1内には、スピーカ20も内蔵している。本実施形態では、表示部5はバックライトを有する2.4インチの小型カラードットマトリックス液晶ディスプレイであり、ケース本体1の後面側(車両後方へ配置される側(ユーザ側(ドライバー側))を表示面としている。表示部5を実装するケース本体1の後方側の高さHは、その他の部位の高さH0よりも大きくしている。
【0031】
図2に示すように、赤外線通信機7は携帯電話機12等の赤外線通信機を内蔵した通信装置との間でデータの送受を行なう。アダプタージャック9は、メモリカードリーダ13を接続する端子である。アダプタージャック9にメモリカードリーダ13を接続することで、そのメモリカードリーダ13に装着されたメモリカード14に格納されたデータを内部に取り込んだり、データベース19や制御部18のメモリの内容をメモリカード14に書き込んだりすることができる。より具体的には、メモリカード14に格納されたデータに、新規な目標物の情報(経度・緯度を含む位置情報,種別情報等)などの更新情報がある場合、その更新情報を制御部18が本レーダー探知機に内蔵されるデータベース19に格納(ダウンロード)し、データベース19のデータを更新する。なお、メモリカードリーダ13の機能は、本体ケース1内に内蔵するように構成してもよい。
【0032】
データベース19は、制御部18のマイコン内あるいはマイコンに外付けした不揮発性メモリ(たとえばEEPROM)である。データベース19には、出荷時に一定の目標物に関する情報を登録しており、その後に追加された目標物についてのデータ等は上記のようにしてデータ更新することができる。また、データ更新は、赤外線通信機7を介して行なうこともできる。
【0033】
DCジャックは、図示省略のシガープラグコードを接続するためのもので、そのシガープラグコードを介して車両のシガーソケットに接続して電源供給を受け得るようにする。
【0034】
無線受信器15は、飛来する所定周波数の無線を受信する。リモコン受信器16は、赤外線によりリモコン(携帯機:子機)17とデータ通信をし、本装置に対する各種の設定を行なう。また、スイッチ部3も制御部18に接続され(図示省略)、リモコン17と同様の設定を行えるようになっている。リモコン17には、待受切替ボタン、設定ボタン、選択ボタン、取消ボタン、決定ボタン、リセットボタン、上下左右の十字ボタンを備えている。
【0035】
さらに本実施形態のレーダー探知機は、図2に示すように車両に実装されているOBD−II(IIはローマ数字の「2」であり、以下「OBD−II」を「OBD2」と記す)コネクタに接続する接続ケーブル22を備え、この接続ケーブル22の先端には、車両のOBD2コネクタに着脱自在に装着できるコネクタ端子23が取り付けられている。OBD2コネクタは、故障診断コネクタとも称され、車両のECUに接続され、各種の車両情報が出力される。さらに本実施形態では、接続ケーブル22の他端には、レーダー探知機のケース本体1の側面に設けたソケット口24と接続するためのコネクタ端子25を設けており、レーダー探知機に対しても接続ケーブル22を着脱できるようにしている。もちろん、接続ケーブル22をレーダー探知機に直接接続するようにしても良い。
【0036】
そこで、この接続ケーブル22に取り付けられたコネクタ端子23と、車両本体側のOBD2コネクタとを連結することで、制御部18は、各種の車両情報を一秒おきに取得する。この車両情報としては、車速、エンジン回転数、エンジン負荷率、スロットル開度、燃料流量、瞬間燃費、吸入空気量(MAF)、インジェクション開時間、残燃料量、アクセル開度、ウインカー情報(左右のウインカーの動作(ON/OFF))、ブレーキ開度、ハンドルの回転操舵角情報等がある。
加速度センサ27はケース本体1内に備え、車両の前後、左右、上下の加速度を検出するセンサである。
【0037】
制御部18は、CPU,ROM,RAM,I/O等を備えるマイコンであり、上記の各種の入力機器から入力される情報に基づき所定の処理を実行し、上記の各種の出力機器を利用して所定の警報・メッセージや情報を出力する。なお、これらの基本構成は、基本的に従来のものと同様のものを用いることができる。
【0038】
本実施形態のレーダー探知機における機能は、制御部18に有するコンピュータが実行するプログラムとして制御部18のEEPROM上に格納され、これを制御部18に有するコンピュータが実行することで実現される。
【0039】
制御部18の有するプログラムによってコンピュータが実現する機能としては、GPSログ機能、待ち受け画面表示機能、レーダースコープ表示機能、車両情報表示機能、GPS警報機能、レーダー波警報機能、無線警報機能などがある。
【0040】
GPSログ機能は、制御部18が1秒ごとにGPS受信器8によって検出された現在位置をその検出した時刻および速度(車速)と関連づけて位置履歴としてデータベース19に記憶する機能である。この位置履歴は例えばNMEA形式で記録する。
待ち受け画面表示機能は、図3(a)に示すように、GPS受信器8によって検出した自車両の速度、緯度、経度、高度を表示部5に表示する機能である。
【0041】
レーダースコープ表示機能は、図3(b)に示すように、GPS受信器8によって検出した現在位置から所定の範囲内(例えば約1kmの範囲内)にある目標物をデータベース19に記憶された位置情報に基づいて検索し、自車位置と目標物の位置との相対的な位置関係を表示部5に表示させる機能である。図3(b)中の左側の「W」が西、右側の「E」が東、上側の「N」が北の方角を示し、「W」と「E」を結ぶ左右方向の線と「N」から下へ伸びる上下方向の線との交点にあるアイコンが自車位置を示している。また「L」「RD」「P」「N」等の文字を有するアイコンが目標物の種類と位置を示す。
【0042】
車両情報表示機能は、図3(c)に示すように、前述したようにOBD2コネクタを介して車両から取得した車両情報のうち、エンジン負荷率の現在値に加え、スロットル開度、燃料流量、瞬間燃費の現在値と、本レーダー探知機を車両に取り付けたときから現在までに1秒おきに取得した瞬間燃費の平均値である平均燃費を表示するとともに、エンジン負荷率の大きさに応じてエンジンの形状を示す3Dオブジェクトの表示態様を変化させて表示する。
【0043】
図3(a)に示すような待ち受け画面表示機能実行中にリモコン17に設けた待受切替ボタンの押下が検出された場合、図3(b)に示すようなレーダースコープ表示機能に切り替える。また、レーダースコープ表示機能実行中にリモコン17に設けた待受切替ボタンの押下が検出された場合、図3(c)に示す車両情報表示機能に切り替える処理を行う。また、車両情報表示機能実行中にリモコン17に設けた待受切替ボタンの押下が検出された場合、待ち受け画面表示機能に切り替える処理を行う。
【0044】
制御部18は、待ち受け画面表示機能、レーダースコープ表示機能、車両情報表示機能、(以下これらの機能を総称して待受機能と称する)の実行中に、発生したイベントに応じて、GPS警報機能、レーダー波警報機能、無線警報機能等の各機能を実現する処理を実行し、当該機能の処理終了時には元の待受機能の処理に戻る。各機能の優先度は、高いほうから、レーダー波警報機能、無線警報機能、GPS警報機能の順に設定している。
【0045】
GPS警報機能は、制御部18に有するタイマーからのイベントにより所定時間間隔(1秒間隔)で実行される処理であり、データベース19に記憶された目標物の緯度経度とGPS受信器8によって検出した現在位置の緯度経度から両者の距離を求め、求めた距離が所定の接近距離(例えば500m以内)になった場合に、表示部5に図4(a)に示すようなGPS警報表示をし、スピーカ20からその旨を示す接近警告の音声を出力する処理である。
【0046】
こうした目標物としては、居眠り運転事故地点、レーダー、制限速度切替りポイント、取締エリア、検問エリア、駐禁監視エリア、Nシステム、交通監視システム、交差点監視ポイント、信号無視抑止システム、警察署、事故多発エリア、車上狙い多発エリア、急/連続カーブ(高速道)、分岐/合流ポイント(高速道)、ETCレーン事前案内(高速道)、サービスエリア(高速道)、パーキングエリア(高速道)、ハイウェイオアシス(高速道)、スマートインターチェンジ(高速道)、PA/SA内 ガソリンスタンド(高速道)、トンネル(高速道)、ハイウェイラジオ受信エリア(高速道)、県境告知、道の駅、ビューポイントパーキング等があり、これらの目標物の種別情報とその位置を示す緯度経度情報と表示部5に表示する模式図または写真のデータと音声データとを対応付けてデータベース19に記憶している。
【0047】
レーダー波警報機能は、マイクロ波受信器4によって速度測定装置(移動式レーダー等(以下、単に「レーダー」と称する))から発せられる周波数帯のマイクロ波に対応する信号が検出された場合に、表示部5に対して警報画面を表示するとともに、スピーカ20から警報音を出力する警報機能である。例えば、レーダーの発するマイクロ波の周波数帯のマイクロ波がマイクロ波受信器4によって検出された場合に、図4(b)に示すように、データベース19に記憶されたレーダーの模式図または写真を表示部5に警報画面として表示するとともに、データベース19に記憶された音声データを読み出して「レーダーです。スピード注意」という音声をスピーカ20から出力する。音声出力中は、警報ランプ6を点燈させる。
【0048】
無線警報機能は、無線受信器15によって、緊急車両等の発する無線電波を受信した場合に、その走行等の妨げとならないよう、警報を発する機能である。無線警報機能においては、取締無線、カーロケ無線、デジタル無線、特小無線、署活系無線、警察電話、警察活動無線、レッカー無線、ヘリテレ無線、消防ヘリテレ無線、消防無線、救急無線、高速道路無線、警備無線等の周波数をスキャンし、スキャンした周波数で、無線を受信した場合には、データベース19に無線種別ごとに記憶されたその周波数に対応する無線を受信した旨の模式図を警報画面として表示部5に表示するとともに、データベース19に無線種別ごとに記憶された音声データを読み出して、スピーカ20からその無線の種別を示す警報音声を出力する。たとえば、取締無線を受信した場合には「取締無線です。スピード注意」のように音声を出力する。音声出力中は、警報ランプ6を点燈させる。
【0049】
本実施形態のレーダー探知機は、GPS警報機能に急激なスピード変化をしたポイントを、第一の処理として急ブレーキ発生ポイントとして記憶させ、第二の処理として次回このポイントに接近した場合に「○○m先急ブレーキ発生ポイントです。ご注意下さい。」等の警報を行う急ブレーキ発生ポイント警報機能を付加している。具体的には次のとおりである。
【0050】
急ブレーキ発生ポイントは、加速度センサ27によって0.2G以上の前後方向の減速方向の加速度が検出された位置からGPS受信器8によって検出した車両の速度が0になった位置までの距離が、制動距離に所定の率(以下安全率)を乗じた距離以内の場合に、その車両の速度が0になったポイントとしている。0.2G以上の前後方向の減速方向の加速度が検出された位置から速度が0になった位置までの距離が、制動距離に所定の率(以下安全率)を乗じた距離を超える場合には急ブレーキ発生ポイントとは判定せずにポイントの記憶は行わない。
【0051】
なお、制動距離は、一定の速度からフルブレーキを掛けた時の距離を求めるものである。具体的には以下のように定義している。
制動距離
1.時速40km/h時までは、速度の二乗/100 → 40km/hなら16m
2.時速40km/hを超えた場合は上記1.の20%減算 → 50km/hなら20m
3.時速40km/hを下回る場合は上記1.に2mを加算 → 30km/hなら11m
【0052】
この様な急ブレーキ発生ポイントをデータベース19に記憶させていき、次にこのポイントに同じ方向から接近した時に警報を行う。これにより、この先に危険なエリアが存在する事を事前に知る事が出来る。
【0053】
急ブレーキポイントの記憶においては、急減速開始位置と停止位置の履歴から進行方向を特定し反対車線では急ブレーキ発生ポイント警報を行わない設定とする。また、データベース19に記憶された事故多発エリアと、急ブレーキ発生ポイントが重複する場所は、急ブレーキ発生ポイント警報を行わないようにする。
【0054】
例えば、進行方向(西→東)へ60km/hで進行中、急ブレーキを掛けて30m先で停止した。上記制動距離の演算式に当てはめて計算すると、制動距離は28.8mであるが、ある一定の安全率を加算した距離以内であれば、急ブレーキ発生ポイントとして記憶させる。この際に、制動開始ポイントと停止ポイントの推移から進行方向を特定して同時に記憶させる。安全率を15%に設定した場合は、28.8×(1+0.15)=33.12mとなり、実際の制動距離は、この値以内なので、急ブレーキ発生ポイントと判定する。安全率は、任意に設定しても良いし、実験等により設定しても良い。
【0055】
2回目に同じポイントに接近した場合、例えば300m手前から200m手前の位置の推移から進行方向を特定する。前回と同じ進行方向であれば、警報を発し、異なっていれば、警報しない。
【0056】
別の例を用いて図5を参照してより詳細な処理について説明する。車輌Aが停車中の車輌BをポイントRで発見して急ブレーキを掛けてポイントSで停止又は減速を終了した場合、前述のようにして急ブレーキ発生ポイントか否かを判定し、急ブレーキ発生ポイントと判定すればポイントSを地点登録し、ポイントSから半径300m範囲のポイントSに至るまでの移動経路を、GPSログ機能によって記録された位置履歴からコピーして、ポイントSを地点(緯度経度)と関連づけて急ブレーキ発生ポイントとしてデータベース19に記憶させる。このとき、「急ブレ−キ発生ポイントに登録しました。」という音声をスピーカ20から出力する。
【0057】
車輌Aの現在位置がデータベース19に地点登録された急ブレーキ発生ポイントであるポイントSから半径300mの位置のエリアEでポイントSへの接近を認識し、このエリアEの位置から、ポイントSから半径200mの位置のエリアFまでの今回のGPSログ機能によって記録された位置履歴と、ポイントSに関連付けてデータベース19に記憶された位置履歴との間に所定以上の相関関係がある場合(例えば今回のGPSログ機能によって記録された位置履歴を結んだ曲線を幅20mとした曲線の中にポイントSに関連付けてデータベース19に記憶された位置履歴の位置が90%以上存在する場合)、エリアF内に進入した段階で警報を行う。例えば、「200m先、急ブレーキ発生ポイントです。ご注意下さい。」という音声をスピーカ20から出力する。このようにして、車輌A3の方向からポイントSへ向かった場合のみ、警報が報知される。
【0058】
このように加速度が所定値以上となった後、停止した状態になった場合に、前述した条件でポイントSの緯度経度情報を記憶する(地点登録する)第一処理を行い、現在位置がエリアF(ポイントSから半径200m)の位置になった場合、エリアF進入時の現在位置と、エリアE(ポイントSから半径300m)進入時の現在位置を含む位置履歴に基づく経路を取得し、今回のエリアE進入時の現在位置からエリアF進入時の現在位置への経路と、所定以上の相関のある場合に「200m先、急ブレーキ発生ポイントです。ご注意下さい。」という音声をスピーカ20から出力する警報を行う第二処理を行う。このように構成によって、反対車線を走行して記憶した位置に接近した場合に、警報される可能性が低くなるなど、従来よりも、警報が必要な場所で的確に警報を発することができ、警報が不要な場合に警報を抑制できるレーダー探知機を提供できる。
【0059】
本実施形態では、このように加速度が所定値以上となった後、停止した状態になった場合に、前述した条件でポイントSの緯度経度情報を記憶する(地点登録する)第一処理を行う際に、ポイントSに至るポイントSから半径300m範囲の移動経路をGPSログ機能によって記録された位置履歴からコピーして同時に関連づけて記憶しておき、第二処理として、現在位置がエリアF(ポイントSから半径200m)の位置になった場合、エリアF進入時の現在位置と、エリアE(ポイントSから半径300m)進入時の現在位置を含む位置履歴に基づく経路を取得し、今回のエリアE進入時の現在位置からエリアF進入時の現在位置への経路と、所定以上の相関のある場合に「200m先、急ブレーキ発生ポイントです。ご注意下さい。」という音声をスピーカ20から出力する警報を行う第二処理を行う。このように両者の進行方向が所定の近似関係にある場合にこの警報を行い、所定の近似関係にない場合にこの警報を行わない構成としている。
そのため、従来よりも、警報が必要な場所で的確に警報を発することができ、警報が不要な場合に警報を抑制できる制御システムを提供できる。
【0060】
本実施形態では、ポイントSを記憶した際に、「急ブレーキ発生ポイントに登録しました。」という音声出力を行う。よって、運転者はポイントSが記憶されたことが分かる。また、この音声により、ポイントSに至るまでに急ブレーキをかけたことが改めて認識される。
【0061】
本実施形態では、データベース19に記憶された事故多発エリアと、急ブレーキ発生ポイントが重複する場所は、急ブレーキ発生ポイント警報を行わないようにしたが、逆にデータベース19に記憶された事故多発エリアと、急ブレーキ発生ポイントが重複する場所は、事故多発エリアの警報を行わないようにしてもよい。いずれの構成においても、警報が重複されてなされてわかりにくくなったり、煩わしくなったりすることを防止できる。従って、従来よりも、警報が必要な場所で的確に警報を発することができ、警報が不要な場合に警報を抑制できる。
【0062】
なお、本実施形態のように急激なスピード変化をしたポイントは、移動距離に対してスピードが急激に変化したポイントとするとよい。また、急激なスピード変化以外に、加速度センサにより、一定以上の加速度を検出した場合に、このポイントを急ブレーキ発生ポイント(例えば図5のポイントS)として記憶するようにしても良い。
安全率は、任意で設定しても良いし、実験によって決めても良い。
【0063】
本実施形態では、停止した位置をポイントSとしたが所定の速度まで減速した位置をポイントSとしてもよい。
上述した各構成要素は適宜組み合わせてレーダー探知機を構成するとよい。例えば、「課題を解決するための手段」の項に記載した例で構成してもよい。
【0064】
本実施形態では、シガープラグコードを介して車両のシガーソケットに接続して電源供給を受け得るようにしたがOBD2コネクタから電源の供給を受けるようにしてもよい。
【0065】
本実施形態では、急ブレーキ発生ポイントは、加速度センサ27によって0.2G以上の前後方向の減速方向の加速度が検出された位置からGPS受信器8によって検出した車両の速度が0になった位置までの距離が、制動距離に所定の安全率を乗じた距離以内の場合に、その車両の速度が0になったポイントとしているがこれに限らない。例えば、「加速度センサ27によって0.2G以上の前後方向の減速方向の加速度が検出された位置」に代えて、「OBD2コネクタ等から、車両のブレーキの状態を取得して、ブレーキング状態(ブレーキを掛けている状態)が検出された位置」としてもよい。また「車両の速度が0になった位置」に代えて、ブレーキング状態でなくなった位置としてもよい。
【0066】
また、本実施形態では、レーダー探知機の例で説明したが、車載用の各種の電子機器の機能として実施することができる。たとえば、ナビゲーション装置や、ドライブレコーダ、カーオーディオの機能として組み込んでもよい。また本実施例で記載した数値の値は、実験等を行って適宜、効果を奏する値に変更してもよい。表示部5の画面サイズなども任意のものとすることができる。また、制御部18には、各機能や警報の優先順位をリモコン17等からのユーザからの指示に基づいて設定する機能を設け、この設定された優先順位で制御部18が処理を行うように構成してもよい。
【0067】
さらに、上述した実施形態では、装置内に各種の情報を記憶したデータベース19を備え、制御部18は係るデータベース19にアクセスして必要な情報を読み出し、各種の処理をしたが、本発明はこれに限ることはない。すなわち、データベース19に登録する情報の一部または全部をサーバに登録しておく。そして、レーダー探知機その他の電子機器・装置は、係るサーバと通信する機能を備え、制御部18は、適宜サーバにアクセスし、必要な情報を取得して処理を実行するシステムとしてもよい。さらには、制御部18の機能の少なくとも一部をサーバにおき、当該機能をサーバで実行し、ユーザが持つ電子機器は、その実行結果を取得するようなシステムとしても良い。
【符号の説明】
【0068】
1 ケース本体
2 ソーラーパネル
4 マイクロ波受信器
5 表示部
6 ランプ
7 赤外線通信機
8 GPS受信器
9 アダプタージャック
10 電源スイッチ
11 携帯電話機
12 メモリカードリーダ
14 メモリカード
15 無線受信器
16 リモコン受信器
17 リモコン
18 制御部
19 データベース
20 スピーカ
21 DCジャック
22 接続ケーブル
27 加速度センサ
【特許請求の範囲】
【請求項1】
車両の現在位置と第一の車両状態とを取得し、前記第一の車両状態が所定状態になった場合に、前記現在位置に基づく位置情報を記憶する第一処理と、前記記憶した位置情報の示す位置と現在位置が所定の接近関係となった場合に第二の車両状態を取得し、第二の車両状態取得時よりも後の所定のタイミングで、第三の車両状態を取得し、前記第二の車両状態と前記第三の車両状態との関係に基づいて所定の警報を行う第二処理を行うこと
を特徴とする制御システム。
【請求項2】
前記第一処理として、前記第一の車両状態が所定状態になった場合に、前記現在位置に基づく位置情報を記憶する際に第一の車両の進行方向に関する情報を関連付けて記憶しておき、
前記第二処理として、前記第二の車両状態と前記第三の車両状態の少なくともいずれか一方を用いて第二の車両の進行方向に関する情報を求め、前記第一の車両の進行方向に関する情報と前記第二の車両の進行方向に関する情報を用いて第一の車両の進行方向と第二の車両の進行方向とが所定の近似関係にある場合に前記所定の警報を行い、所定の近似関係にない場合に前記所定の警報を抑制すること
を特徴とする請求項1に記載の制御システム。
【請求項3】
前記現在位置に基づく位置情報を記憶する際に、その旨を示す情報を報知する制御を行うこと
を特徴とする請求項1または2に記載の制御システム。
【請求項4】
前記第一の車両状態が所定状態になった場合は、所定レベル以上の急ブレーキの状態となった場合であること
を特徴とする請求項1〜3のいずれかに記載の制御システム。
【請求項5】
前記第一の処理とは異なる処理によって記憶された位置情報の示す位置である第三位置と所定の接近関係になった場合に所定の警報を行う第三の処理を行う機能を備え、
前記第二の処理における所定の警報は、前記第三の処理による所定の警報を行う場合には、抑制すること
を特徴とする請求項1〜4のいずれかに記載の制御システム。
【請求項6】
前記第一の処理とは異なる処理によって記憶された位置情報の示す位置である第三位置と所定の接近関係になった場合に所定の警報を行う第三の処理を行う機能を備え、
前記第三の処理における所定の警報は、前記第二の処理による所定の警報を行う場合には、抑制すること
を特徴とする請求項1〜4のいずれかに記載の制御システム。
【請求項7】
請求項1〜6の制御システムとしての機能をコンピュータに実現させるためのプログラム。
【請求項1】
車両の現在位置と第一の車両状態とを取得し、前記第一の車両状態が所定状態になった場合に、前記現在位置に基づく位置情報を記憶する第一処理と、前記記憶した位置情報の示す位置と現在位置が所定の接近関係となった場合に第二の車両状態を取得し、第二の車両状態取得時よりも後の所定のタイミングで、第三の車両状態を取得し、前記第二の車両状態と前記第三の車両状態との関係に基づいて所定の警報を行う第二処理を行うこと
を特徴とする制御システム。
【請求項2】
前記第一処理として、前記第一の車両状態が所定状態になった場合に、前記現在位置に基づく位置情報を記憶する際に第一の車両の進行方向に関する情報を関連付けて記憶しておき、
前記第二処理として、前記第二の車両状態と前記第三の車両状態の少なくともいずれか一方を用いて第二の車両の進行方向に関する情報を求め、前記第一の車両の進行方向に関する情報と前記第二の車両の進行方向に関する情報を用いて第一の車両の進行方向と第二の車両の進行方向とが所定の近似関係にある場合に前記所定の警報を行い、所定の近似関係にない場合に前記所定の警報を抑制すること
を特徴とする請求項1に記載の制御システム。
【請求項3】
前記現在位置に基づく位置情報を記憶する際に、その旨を示す情報を報知する制御を行うこと
を特徴とする請求項1または2に記載の制御システム。
【請求項4】
前記第一の車両状態が所定状態になった場合は、所定レベル以上の急ブレーキの状態となった場合であること
を特徴とする請求項1〜3のいずれかに記載の制御システム。
【請求項5】
前記第一の処理とは異なる処理によって記憶された位置情報の示す位置である第三位置と所定の接近関係になった場合に所定の警報を行う第三の処理を行う機能を備え、
前記第二の処理における所定の警報は、前記第三の処理による所定の警報を行う場合には、抑制すること
を特徴とする請求項1〜4のいずれかに記載の制御システム。
【請求項6】
前記第一の処理とは異なる処理によって記憶された位置情報の示す位置である第三位置と所定の接近関係になった場合に所定の警報を行う第三の処理を行う機能を備え、
前記第三の処理における所定の警報は、前記第二の処理による所定の警報を行う場合には、抑制すること
を特徴とする請求項1〜4のいずれかに記載の制御システム。
【請求項7】
請求項1〜6の制御システムとしての機能をコンピュータに実現させるためのプログラム。
【図1】


【図2】
【図4】
【図5】
【図3】
【図2】
【図4】
【図5】
【図3】
【公開番号】特開2013−69247(P2013−69247A)
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願番号】特願2011−209203(P2011−209203)
【出願日】平成23年9月26日(2011.9.26)
【出願人】(391001848)株式会社ユピテル (238)
【Fターム(参考)】
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願日】平成23年9月26日(2011.9.26)
【出願人】(391001848)株式会社ユピテル (238)
【Fターム(参考)】
[ Back to top ]