
制御モータ駆動装置
【課題】本発明は上記課題に鑑み、インバータ回路におけるスイッチング素子の出力電流に発生するノイズを同期的に低減させ、インバータ回路によって駆動される制御モータの誤作動を有効に防止し得る制御モータ駆動装置の提供を目的とする。
【解決手段】制御モータ駆動装置100を構成するインバータ回路240は、ドライブ回路141と複数のスイッチ回路242a〜242fと電流検出回路143とを備えている。そして、インバータ回路240に配備されるそれぞれのスイッチ回路242a〜242fは、ゲートGに接続される調整抵抗Rga〜Rgfと、エミッタE−コレクタC間に接続される帰還ダイオードD1a〜D1fと、ゲートG−エミッタE間に接続される吸収ダイオードD2a〜D2fとを備えるスイッチング素子Tra〜Trfから構成されている。
【解決手段】制御モータ駆動装置100を構成するインバータ回路240は、ドライブ回路141と複数のスイッチ回路242a〜242fと電流検出回路143とを備えている。そして、インバータ回路240に配備されるそれぞれのスイッチ回路242a〜242fは、ゲートGに接続される調整抵抗Rga〜Rgfと、エミッタE−コレクタC間に接続される帰還ダイオードD1a〜D1fと、ゲートG−エミッタE間に接続される吸収ダイオードD2a〜D2fとを備えるスイッチング素子Tra〜Trfから構成されている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、制御モータ駆動装置に関し、特にインバータ回路内に流れる電流のノイズによって発生する制御モータの誤作動を解消させる際に用いて好適なものである。
【背景技術】
【0002】
従来より、制御モータの駆動によって生じる騒音又はトルク斑を解消させる技術として、制御モータをインバータ制御させる制御モータ駆動装置の研究及び開発が進められている。かかる制御モータ駆動装置は、例えば、空調装置に設けられるコンプレッサ、洗濯機に設けられるドラム駆動モータ、車両用駆動モータ等、広範な技術分野に亘り広く利用されている。
【0003】
特開2002−159194(特許文献1)では、制御モータ駆動装置の技術を用いたインバータ制御システムが示されている。図5を参照して特許文献1の技術に係るインバータ駆動システムの構成を説明する。尚、同図において、スイッチング素子群140を構成する複数のユニットを、それぞれスイッチ回路140a〜140fとして以下説明する。図示の如く、インバータ駆動システム100は、交流電源110と整流回路120とアクティブコンバータ回路130(特許請求の範囲における力率改善回路)とスイッチング素子群140(特許請求の範囲における複数のスイッチ回路)とドライブ回路141と制御マイコン142と電流検出回路143と制御モータ150とから構成されている。かかる整流回路120は交流電源110の負の成分を正の成分に変換しリップル電圧を生成する。アクティブコンバータ回路130はリップル電圧を平滑化し制御マイコン142に基づいてPWM波形制御を行う。スイッチング素子群140を構成するそれぞれのスイッチ回路140a〜140fは、IGBTによって成るスイッチング素子Tra〜Trfから構成され、ドライブ回路141によって駆動される。
【0004】
制御マイコン142は、ドライブ回路141と電流検出回路143と力率改善回路131(実施の形態における波形制御部)がそれぞれ接続されており、外部から供給される指令回転数を受信してドライブ回路及び力率改善回路131を駆動させる機能を備える。ドライブ回路141では、制御マイコン142から送信されるドライブ回路駆動信号SGmに応じて、出力ポートからスイッチング素子駆動信号SGa〜SGfを出力させる。
【0005】
ドライブ回路141は、ドライブ回路駆動信号SGmに基づいて、High−Low信号から成るスイッチング素子駆動信号SGa〜SGfをそれぞれ出力する。具体的にはスイッチング素子駆動信号SGa〜SGfの出力パターンが複数規定されており、このうち、第1の駆動状態では、スイッチング素子駆動信号SGa及びSGeのみHigh信号を出力し、スイッチ回路140a及びスイッチ回路140eのみを駆動状態とさせる。また、第2の駆動状態では、スイッチ回路140aとスイッチ回路140fを駆動状態とさせる。更に、第3の駆動状態では、スイッチ回路140fとスイッチ回路140bを駆動状態とさせる。加えて、第4の駆動状態では、スイッチ回路140bとスイッチ回路140dを駆動状態とさせ、第5の駆動状態では、スイッチ回路140cとスイッチ回路140dを駆動状態とさせ、第6の駆動状態では、スイッチ回路140cとスイッチ回路140eを駆動状態とさせる。そして、ドライブ回路141は、第1の駆動状態から順次切換操作を行い、第6の駆動状態とされた後に再び第1の駆動状態へ復帰させ、これにより、インバータ回路140の循環制御を行う。
【0006】
図6にはインバータ制御システム100の一部拡大図が示されており、併せて、スイッチング素子群の駆動状態が説明されている。尚、同図では、ドライブ回路141に出力ポートPa〜Pfを追加図示して説明する。図6(a)に示す如く、第1の駆動状態とされたスイッチング素子群140では、スイッチ回路140a及びスイッチ回路140eが駆動状態とされ、その他のスイッチ回路が非駆動状態とされる。この場面では、スイッチング素子群140には変調電位Vmが印加されている。従って、スイッチング素子群140を流れる電流は、当該電流の値を変えつつ、起点a→スイッチング素子Tra→制御モータ150→スイッチング素子Tre→電流検出回路143→終点bへと導かれる。このとき、電流検出回路143は、出力電流ILを検出し、これによって検出された電流値を制御マイコン142へ出力する。そして、制御マイコン142では、検出された電流値が予め規定された限界電流値より大きい場合には、制御モータ150を予め規定された停止モードに従いドライブ回路141を制御する。
【0007】
これに対し、図6(b)ではスイッチング素子群140に係る第2の駆動状態が説明されている。制御モータ150は、図示しない内部コイルが回転運動を持続し、U相電源ラインuとV相電源ラインvとの間に回生起電力を生じさせる。従って、図6(b)で示される様に、スイッチング素子群140を流れる電流Irは、制御モータ150からスイッチ回路140bへと導かれ、帰還ダイオードD1bを通過する。
【0008】
かかる技術におけるインバータ制御システム100では好応答性が要求される装置であるため、本来、ドライブ回路141の出力ポートとスイッチング素子のゲートとの間には、ゲート電位を低下させる不要な素子を排除させた構成とするのが好ましい。具体的には、スイッチング素子Tra〜Trfの切替速度を向上させるため、出力ポートとスイッチング素子のゲートとの間の抵抗値をできるだけ低く設定させるのが好ましい。しかし、かかる抵抗値が低く設定されると、スイッチング素子駆動信号SGa〜SGfへ重畳されたノイズは、インバータ回路の構成上コモンモードノイズを誘発させるので、制御モータ駆動装置の周辺に配備される各種電子機器にノイズ障害を誘発させるとの問題が生じる。
【0009】
そこで、上述の問題を回避するため、特開2005−020919(特許文献2)では、コモンモードノイズを低減させる技術が記されている。即ち、インバータ部を構成する各スイッチング素子は、当該スイッチング素子のエミッタからコレクタへ向かって順方向に接続されたダイオード(特許請求の範囲における帰還ダイオード)を備え、更に、スイッチング素子のゲート側に抵抗(特許請求の範囲における調整抵抗)が接続されている。従って、ゲート抵抗によりスイッチング素子駆動信号SGa〜SGfに重畳されるノイズが低減されるので、これに呼応しコモンモードノイズが抑制され、周辺機器のノイズ障害を回避することができる。
【0010】
【特許文献1】特開2002−159194号公報
【特許文献2】特開2005−020919号公報
【発明の開示】
【発明が解決しようとする課題】
【0011】
しかしながら、特許文献2の制御モータ駆動装置では、ノイズの変動値を考慮に入れて調整抵抗の抵抗値を過大設計させると、スイッチング素子のゲートに印加されるゲート電位が低下し、スイッチング素子の閾値電位に対するゲート電位のアドバンテージが十分に確保できなくなる。このようなスイッチ回路では、スイッチング素子のゲートで固有振動が発生し、当該固有振動に応じてエミッタから出力される出力電流にノイズが重畳される。かかるノイズは、調整抵抗の抵抗値に比例して顕著に発現し、ドライブ回路の内部でスパイクノイズを誘発させるので、ドライブ回路から出力されるスイッチング素子駆動信号にノイズが重畳され、結果的に、スイッチング素子におけるゲート電位の振動を励起させてしまうとの問題を招く。
【0012】
また、恒久的なサイクルで出力電流にノイズが重畳されると、ドライブ回路は慢性的に停止指令信号を制御マイコンへ出力させるので、かかる制御モータ駆動装置では、制御モータの安定的な駆動状態を得られなくなるとの問題が生じる。
【0013】
更に、図6(b)に示される如く、制御モータの回生起電力によって帰還ダイオードにキャリアが注入されるので、かかる後、キャリアが蓄積された帰還ダイオードでは、キャリアの拡散に伴って急峻なリカバリ電流が発生する。従って、キャリアの拡散経路に接続されたスイッチング素子が駆動されると、スイッチング素子のコレクタ−ゲート間の電位差が急変動し、これによっても、スイッチング素子から出力される出力電流にノイズが重畳されてしまうとの問題が生じる。
【0014】
加えて、スイッチング素子のエミッタと電流検出回路とを接続させる電源ラインには回避できない寄生インダクタンスが存在し、かかる寄生インダクタンスは、エミッタの出力電流の増加に応じてエミッタ電位を増加させる。このとき、特許文献2の制御モータ駆動装置では、出力電流が流れ始めると、エミッタ電位の上昇によってゲート−エミッタ間の寄生容量である入力容量Ciesに電荷が蓄積されゲート側が負にバイアスされる。これにより、ゲート電位が低下しスイッチング素子の閾値電位を下回ると、スイッチング素子は一時的に非駆動状態とされる。その直後、出力電流の減少に伴いエミッタ電位が減少し、これ応じて、ゲート電位が上昇して閾値電位を上回り、スイッチング素子は再び駆動状態とされる。その後、スイッチング素子はエミッタから出力電流を出力させ、再度エミッタ電位が上昇する。然して、これらの動作が繰り返されスイッチング素子のゲートが振動する場合、出力電流には上述したノイズと同様の波形成分が重畳されてしまうとの問題が発生する。
【0015】
更に加えて、スイッチング素子の選択基準によっては順伝達コンダクタンスが低値とされる場合がある。かかる場合、当該スイッチング素子の駆動周波数が大きくなり、これにより、スイッチング素子の出力電流に重畳されるノイズは、ゲート信号に対する位相差が大きくなるため、発振状態に入る危険性が非常に高くなる。そして、出力電流のノイズが発振状態に入ると、ドライブ回路では誤動作を生じ、その結果、制御マイコンがインバータ回路の動作を停止させてしまうとの問題も生じる。
【0016】
更に、IGBTを採用したスイッチング素子は、環境温度が低下していくと、ゲート電位が一定であっても相互コンダクタンスが変動する性質を有している。従って、制御モータを寒冷地で用いる際、スイッチング素子では、相互コンダクタンスが変動することにより、設計上では回避されていた共振点を遷移するノイズモードが発生し、これにより、インバータ回路では、スイッチング素子の出力電流にノイズが重畳され、制御モータを停止させてしまうとの問題を招来させる。また、かかる問題は、摂氏マイナス10度以下の環境で制御モータ駆動装置を使用する際、顕著に現れると発明者より報告されている。
【0017】
本発明は上記課題に鑑み、インバータ回路におけるスイッチング素子の出力電流に発生するノイズを同期的に低減させ、インバータ回路によって駆動される制御モータの誤作動を有効に防止し得る制御モータ駆動装置の提供を目的とする。
【課題を解決するための手段】
【0018】
上記課題を解決するため、本発明では次のような制御モータ駆動装置の構成とする。すなわち、整流回路を介して交流電源に接続される力率改善回路と、前記力率改善回路及び制御モータのそれぞれに接続されるインバータ回路とから成り、前記インバータ回路は制御マイコンに接続されたドライブ回路と前記ドライブ回路にそれぞれ接続された複数のスイッチ回路と前記ドライブ回路に接続された電流検出回路とを備え、前記複数のスイッチ回路のそれぞれは、ゲートに接続される調整抵抗とエミッタ−コレクタ間に接続される帰還ダイオードとゲート−エミッタ間に接続される吸収ダイオードとを備えるスイッチング素子から構成されることとする。このとき、前記吸収ダイオードは、逆回復時間が0.2μsec以下である性質を有しているのが好ましい。また、前記スイッチング素子は、順伝達コンダクタンスが6.1〜10(S)の範囲であるのが好ましい。更に、前記制御モータ駆動装置は、摂氏マイナス10度以下の環境で用いられる場合に好適である。
【発明の効果】
【0019】
本発明によれば、スイッチング素子から出力される出力電流にノイズが重畳される場合であっても、吸収ダイオードによって、当該出力電流のノイズ成分がゲートへフィードバックされ、ゲート電位がフィードバックされた電流値に応じて増加されるので、スイッチング素子に発生する固有振動が同期的に抑制され、これにより、スイッチング素子で出力される出力電流のノイズ成分が低減される。また、吸収ダイオードによって出力電流のノイズ成分が抑えられると、電流検出回路によって得られる電流値の波形が安定し、ドライブ回路の内部に生じるスパイクノイズが抑えられるので、ドライブ回路から出力されるスイッチング素子駆動信号の波形状態が安定し、これに応じて、スイッチング素子に生じる固有振動が低減され、スイッチング素子の出力電流の波形が更に安定化される。更に、本発明に係る制御モータ駆動装置が寒冷地で使用される場合であっても、上述に記す如く、吸収ダイオードにおける吸収作用によって、出力電流の電流が低減され、制御モータが安定的に駆動される。
【0020】
また、上述の如く、スパイクノイズの発生レベルが低減されると、スイッチング素子駆動信号の波形状態が安定化され、スイッチング素子の出力電流のノイズ成分が抑制されるといった具合に、かかる改善現象が好循環的に進行するので、ドライブ回路は出力電流のノイズに基づく誤検出から保護され、不要に停止指令信号を出力することが無くなる。これにより、制御モータ駆動装置は、定常時において不必要な停止動作を指示すること無く安定的に制御モータを駆動させ、非常時においてのみ必要に応じて制御モータを停止させることが可能とされる。
【0021】
更に、駆動されているスイッチング素子に出力電流とリカバリ電流との双方が流入する場合でも、当該スイッチング素子にて出力される出力電流のノイズ成分は、吸収ダイオードによってスイッチング素子のゲートへフィードバックされ、これにより、スイッチング素子における出力電流のノイズレベルが緩和される。また、インバータ回路の誤動作により、一方のスイッチング素子とこれに接続される他方のスイッチング素子とが同一相短絡を起こした場合であっても、出力電流のノイズ成分をスイッチング素子のゲートへフィードバックさせ、スイッチング素子の焼損から保護することが期待できる。
【0022】
加えて、寄生インダクタンスによってスイッチング素子のエミッタ電位が上昇する場合であっても、吸収ダイオードの作用によって、ゲート−エミッタ間の入力容量に蓄積された電荷量が低減されるので、ゲート電位が上昇し、出力電流のノイズ成分が低下される。
【発明を実施するための最良の形態】
【0023】
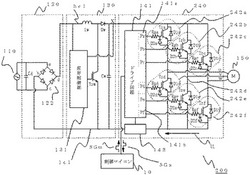
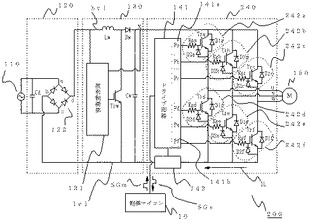
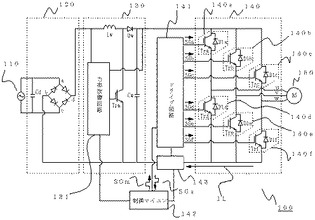
以下、本発明に係る実施の形態につき図面を参照して説明する。図1では本実施の形態に係る制御モータ駆動装置200の構成が示されている。図1に示す如く、制御モータ駆動装置200は、整流回路120を介して交流電源110に接続される力率改善回路130と、力率改善回路120及び制御モータ150のそれぞれに接続されるインバータ回路240とから構成されている。
【0024】
図示の如く、整流回路120は、ブリッジ回路部122とコンデンサCdとから構成されている。ブリッジ回路部122では複数のダイオードによってブリッジ回路部が形成されている。また、コンデンサCdはブリッジ回路部122の接点aと接点cとに並列接続されている。このとき同時に、接点aと接点cとの間には交流電源110が接続されている。更に、ブリッジ回路部122の接点bと接点dには力率改善回路130が接続されている。かかる構成により、コンデンサCdによって交流電源110のノイズ成分がフィルタリングされた後、ブリッジ回路部122の整流作用によって、交流電源110の供給電圧のうち正弦波の負成分が正成分に変換される。これにより、整流回路120では脈動波となるリップル電圧が生成され、かかるリップル電圧は力率改善回路130へ印加される。
【0025】
力率改善回路130は、チョークコイルLwとダイオードDwとスイッチング素子TrwとコンデンサCwと波形制御部131とから構成されている。また、力率改善回路130にはブリッジ回路部122の接点dに接続された高電源ラインhclと接点bに接続された低電源ラインlclとが配備されている。図示の如く、チョークコイルLw及びダイオードDwは高電源ラインhclに設けられている。このとき、チョークコイルLw及びダイオードDwは互いに直列接続され、これによって配置されたダイオードDwはカソードがインバータ回路240へと導通される。波形制御部131は、チョークコイルLwとダイオードDwとの両端に並列接続され、同時に、スイッチング素子Trwのゲートにも接続されている。かかるスイッチング素子Trwには、電気的にON/OFF制御を行うトランジスタが用いられ、例えば、MOSFET、バイポーラトランジスタ、IGBT等が一般的に用いられており、本実施の形態では、IGBTを採用することとする。スイッチング素子Trwは、チョークコイルLwとダイオードDwとの間にコレクタが接続され、低電源ラインlclにエミッタが接続される。また、コンデンサCwは、一方がダイオードDwのカソードと波形制御部131に導かれる配線接続部Xとの間に接続され、他方が低電源ラインlclに接続されている。即ち、スイッチング素子Trwのコレクタ−エミッタ間とコンデンサCwの各々は、ブリッジ回路部122の接点b−d間に並列接続される。かかる構成により、整流回路120から印加されたリップル電圧は、昇圧されると供に平滑化され、高電源ラインhclと低電源ラインlclとの両端において、略一定値の直流電圧に変換される。一方、波形制御部131では、入力されたリップル電圧と出力させる直流電圧とを比較し、PWM波形制御を伴って制御モータ150を駆動させる際に必要な電力を供給できるように力率を調整する。ここで、PWM(Pulse Wide Modulation)波形制御とは、波形制御部131からスイッチング素子Trwのゲートに駆動信号を出力し、スイッチング素子Trwを数KHz程度の高周波で駆動させる。そして、スイッチング素子Trwの断続的なON/OFF駆動によって、直流電圧をパルス波状の変調電位Vmに変換させる制御を言う。このとき、パルス波状の変調電位Vmは、PWM波形制御によって以下の如く変調され、インバータ回路240に印加される。即ち、制御モータ150を円滑な駆動状態とさせるために、変調電位Vmのパルス幅を電位の印加時間に対して連続的に増減させ、それぞれの単位パルス幅に対応する等価電位が正弦波状に分布する様にスイッチング素子Trwを駆動させる。このとき、変調電位Vmにおけるパルス波のデューティー比を変更することで正弦波に相当する電圧値が制御される。また、変調電位Vmにおけるパルス波のピッチを変更することで正弦波に相当する周波数成分が制御される。
【0026】
インバータ回路240は、制御マイコン10に接続されたドライブ回路141と、ドライブ回路141にそれぞれ接続された複数のスイッチ回路242a〜242fと、ドライブ回路141に接続された電流検出回路143とを備えている。また、力率改善回路130に配備される高電源ラインhclと低電源ラインlclとが各々延長して設けられている。更に、制御モータ150に接続されるU相電源ラインu及びV相電源ラインv及びW相電源ラインwが設けられ、この他、部品間を導通させる信号ライン及び電源ラインが適宜配線されている。
【0027】
図1に示す如く、ドライブ回路141には、出力ポートPa〜Pfが配備されている。そして、制御マイコン10から送信されるインバータ駆動信号SGmに応じて、出力ポートPa〜Pfからスイッチング素子駆動信号SGa〜SGfを出力させる。また、ドライブ回路141は、電流検出回路143によって検出された出力電流ILの電流値を検出する。更に、ドライブ回路141に格納される所定閾値と検出された電流値とを比較し、出力電流ILの電流値が所定閾値より大きい場合には、ドライブ回路141から制御マイコン10に向けて停止指令信号SGsを出力する。かかる場合、制御マイコン10では、停止指令信号SGsを受信し、予め規定された停止モードに準えて制御モータ150の制御を行う。尚、本実施の形態における、電流検出回路143の具体的な構成を示すと、例えば、所定の抵抗値を有する検出抵抗を配置させ、かかる検出抵抗の両端部をドライブ回路141の所定のポートへ接続させる構成により、検出抵抗を通過する出力電流ILの電流値が検出可能とされる。
【0028】
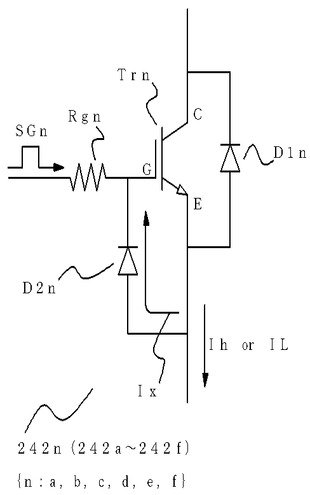
図2ではインバータ回路に複数配備されるスイッチ回路の単位構成が示されている。スイッチ回路242nは、ゲートGに接続される調整抵抗Rgnと、エミッタE−コレクタC間に接続される帰還ダイオードD1nと、ゲートG−エミッタE間に接続される吸収ダイオードD2nとを備えるスイッチング素子Trnから構成されている。尚、スイッチ回路242a〜242fは、それぞれ同一の構成とされるため、同図では、本来a〜fと標記されるべき部分を一般化して単にnと標記し、便宜的にスイッチ回路242nと示している。これに伴い、スイッチ回路242nの構成部品についても、スイッチング素子Trn及び調整抵抗Rgn及び帰還ダイオードD1nと一般化して標記する。図示の如く、スイッチング素子Trnは、ゲートGとコレクタCとエミッタEとを具備し、ゲートGに入力されたスイッチング素子駆動信号SGnに応じて駆動される。また、調整抵抗Rgnは、スイッチング素子TrnのゲートGに設けられ、信号ラインを介して一端がドライブ回路141の出力ポートに導通され他端がスイッチング素子TrnのゲートGに導通されている。また、帰還ダイオードD1nは、当該帰還ダイオードD1nのアノードがスイッチング素子TrnのエミッタEに接続されカソードがコレクタCに接続されている。更に、吸収ダイオードD2nは、当該吸収ダイオードD2nのアノードがスイッチング素子TrnのエミッタEに接続されカソードがコレクタCに接続されている。尚、スイッチング素子Trnには、電気的に駆動状態が制御されるMOSFET、バイポーラトランジスタ、IGBT等のトランジスタ、又は、GTO等のサイリスタ等が適宜用いられる。本実施の形態では、インバータ回路240に数百(V)程度の両端電圧が印加されるため、高電力を制御する際に好適なIGBTを用いるのが好ましい。また、調整抵抗Rgnは、抵抗値を少なくとも170Ω程度以上に設定するのが好ましい。より好ましくは、抵抗値を680Ω程度以上に設定する。これにより、スイッチング素子駆動信号SGa〜SGfに重畳されるノイズの値が低減されるので、回路内に生じるコモンモードノイズが低減され、制御モータ駆動装置の周辺電子機器へのノイズ障害を回避することが可能とされる。尚、吸収ダイオードD2nの特性にかかる好ましい態様については図4にて後述する。
【0029】
尚、制御モータ駆動装置200にあっては、出力効率を改善させるべく、スイッチング素子Trnの損失を抑制させる対策が施されるのが好ましい。ここで、低損失のスイッチング素子Trnを選定する場合、市販されている低損失タイプのスイッチング素子Trnでは、プレーナ型のIGBTが広く流通され、当該IGBTの順伝達コンダクタンスgfeが6.1〜10(S)とされている。かかる如く順伝達コンダクタンスgfeが低値に設定されたIGBTでは、当該IGBTの駆動周波数fmが大きくなる傾向を示す。かかる如く駆動周波数fmが大きくなると、IGBTの出力電流ILに重畳されるノイズは、ゲート信号に対する位相差を大きくさせるため、発振状態に入る危険性が非常に高くなる。かかる現象は、IGBTの順伝達コンダクタンスgfeが6.1〜8.05(S)とされる場合に極めて顕著に現れる。但し、本実施の形態では、順伝達コンダクタンスgfeの値が低いIGBTを選択する場合であっても、後述する吸収ダイオードD2nの作用によって、出力電流ILに重畳されるノイズの低減が有効に図られる。従って、本実施の形態に係る制御モータ駆動装置200では、かかるノイズの低減と出力効率の改善との双方の実現を可能とさせ得る。
【0030】
上述の如く構成されたスイッチ回路242a〜242fは、インバータ回路240において以下の様に適用される。図1に示す如く、スイッチ回路242a〜242fのそれぞれは、出力ポートPa〜Pfに対応して設けられている。このとき、スイッチング素子TraのエミッタEとスイッチング素子TrdのコレクタCとが電源ラインLuで結線される。一方、スイッチング素子TraのコレクタCには高電源ラインhclが接続され、他方、スイッチング素子TrdのエミッタEには低電源ラインlclが接続される。これと同じくして、スイッチ回路242bとスイッチ回路242e、及び、スイッチ回路242cとスイッチ回路242fとがそれぞれ電源ラインLv〜Lw等によって配線される。また、インバータ回路240は、U相電源ラインuとV相電源ラインvとW相電源ラインwとによって制御モータ150に接続されている。そして、かかる構成を具備するドライブ回路141は、インバータ駆動信号SGmに基づいてスイッチング素子駆動信号SGa〜SGfをそれぞれ出力する。具体的には、ドライブ回路141においてスイッチング素子駆動信号SGa〜SGfの出力パターンが複数規定されている。このうち、第1の駆動状態では、出力ポートPa及び出力ポートPeから、スイッチング素子駆動信号SGa及びスイッチング素子駆動信号SGeをHigh状態とさせて出力し、その他の出力ポートではスイッチング素子駆動信号SGnの波形をLow状態に維持させる。即ち、スイッチ回路242a及びスイッチ回路242eのみを駆動状態とさせる。また、第2の駆動状態では、スイッチ回路242aの駆動状態を維持させたまま、スイッチ回路242eの替わりにスイッチ回路242fを駆動状態とさせる。更に、第3の駆動状態では、スイッチ回路242fの駆動状態を維持させ、スイッチ回路242aの替わりにスイッチ回路242bを駆動状態とさせる。以降、上述の如く切換動作を行い、第4の駆動状態では、スイッチ回路242bとスイッチ回路242dを駆動状態とさせ、第5の駆動状態では、スイッチ回路242cとスイッチ回路242dを駆動状態とさせ、第6の駆動状態では、スイッチ回路242cとスイッチ回路eを駆動状態とさせる。そして、ドライブ回路141は、第1の駆動状態から順次切換操作を行い、第6の駆動状態とされた後に再び第1の駆動状態へ復帰させ、これにより、インバータ回路240の循環制御を行う。尚、かかる切換動作は、制御モータ150を駆動させる一例であって、本実施の形態におけるドライブ回路141では、この他、種々のインバータ回路240のスイッチング操作を適用できる。
【0031】
かかる構成により、制御モータ駆動装置200は以下の如く動作する。即ち、交流電源110から供給された正弦波状の電圧は、整流回路120にてリップル電圧に変換される。かかるリップル電圧は、力率改善回路130に印加され脈動成分が除去されるとともにPWM波形制御され、制御モータ150の制御状態に適合した変調電位Vmに変換される。その後、変調電位Vmはインバータ回路240に印加される。かかる状態において、インバータ回路240は、制御マイコン10から送信されるインバータ駆動信号SGmに基づいて、出力ポートPa〜Pfにてスイッチング素子駆動信号SGa〜SGfを出力させ、所望のスイッチ回路242a〜242fを駆動状態とさせる。
【0032】
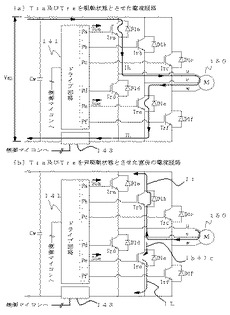
ここで例えば、スイッチ回路242a〜242fの駆動パターンが第1の駆動状態とされる場合、図3(a)に示す如く、スイッチ回路242a及びスイッチ回路242eが駆動状態とされる。この場面では、先ず、出力電流Ihがスイッチング素子TraのエミッタEから出力される。出力電流Ihは、エミッタEを起点としU相電源ラインuを介して制御モータ150へと導かれ、その後、V相電源ラインvを介しスイッチング素子TreのコレクタCへと導かれる。そして、スイッチング素子Treでは、ゲートG−コレクタC間に生じた電位差に応じて出力電流ILを出力させる。更に、出力電流ILは、電流検出回路143に導かれる。但し、かかるスイッチング素子TraのエミッタEで出力される出力電流Ihにノイズが重畳される場合、スイッチング素子Traは更に以下の如く駆動される。即ち、出力電流Ihにノイズが重畳されると、エミッタEの電位状態がノイズの状態に応じて変動するので、エミッタE−ゲートG間の電位差もノイズ状態に応じて変動し、吸収ダイオードD2aを介してエミッタEからゲートGへ向かって吸収電流Ixが流れる。このとき、吸収電流Ixに応じてスイッチング素子Traへ印加されるゲート電位が増加するので、スイッチング素子Traが安定した駆動状態へと改善される。これにより、エミッタEにて出力される出力電流Ihは、スイッチング素子Traの駆動状態に同期してノイズ成分の値が低下される。また、吸収ダイオードD2a〜D2fは全てのスイッチ回路242a〜242fに設けられているので、スイッチング素子Treにおいても上述と同様の作用を受け、エミッタEにて出力される出力電流ILにあっても、スイッチング素子Treの駆動状態に同期してノイズ成分の値が低下される。従って、電流検出回路143ではノイズ成分が十分に抑えられた出力電流ILを検出することとなり、これにより、ドライブ回路141は、出力電流ILのノイズに基づく不要な停止指令信号SGsの出力から免れ、インバータ回路240の不具合が発生した場合にのみ適切な停止指令信号SGsを出力させる。
【0033】
図3(b)に示す如く、かかる第1の駆動状態が終了した後、スイッチ回路242nの駆動パターンが第2の駆動状態へと切り替えられる場合、制御モータ150では、図示しない内部コイルの回転運動が持続される。そして、U相電源ラインuとV相電源ラインvとの間に回生起電力を生じさせ、これによって生じた電流Irがインバータ回路240の内部を循環する。このとき、スイッチング素子Trbに導かれた電流Irは、帰還ダイオードD1bによってバイパスされて、スイッチング素子TrbのエミッタE−コレクタC間を通過する。従って、回生起電力が生じている状態では、電流Irによってキャリアが帰還ダイオードD1bに注入され続ける。その後、駆動パターンが切り替わり、帰還ダイオードD1bに注入されたキャリアが拡散される時に、スイッチング素子Trbへ直列接続されたスイッチング素子Treが駆動すると、スイッチング素子Treではリカバリ電流Icによって駆動状態が不安定とされ、出力電流ILにノイズを重畳させる。しかし、スイッチ回路242eの出力電流ILは、リカバリ電流Icによってノイズが重畳されたとしても、吸収ダイオードD2eによって吸収作用を受けるので、電流検出回路143ではノイズ成分が十分に抑えられた出力電流ILを検出することとなる。従って、ドライブ回路141は、出力電流ILのノイズに基づく不要な停止指令信号SGsの出力から免れ、インバータ回路240の不具合が発生した場合にのみ適切な停止指令信号SGsを出力させる。
【0034】
また、本実施の形態における制御モータ駆動装置200は、エアコン等の室外機と供に室外へ配置され低温環境下で使用される場合がある。このとき、スイッチング素子Tra〜Trfは、周期的な温度の変化に伴って相互コンダクタンスが変動し、設計上で回避されていた共振点を一時的に遷移し、これによって、出力電流ILにノイズを重畳させる場合がある。また、環境温度が著しく低下する場合にはスイッチング素子Tra〜Trfの閾値電圧Vthが上昇するので、運転状態若しくは環境状態の如何によって、かかる閾値電圧Vthとゲート部におけるゲート電位とが拮抗状態とされ、出力電流ILにノイズが重畳される場合もある。しかし、本実施の形態に係る制御モータ駆動装置200には、スイッチ回路242a〜242fのそれぞれに吸収ダイオードD2a〜D2fを備えた構成としているので、制御モータ駆動装置200における使用温度の低下に起因してスイッチ回路242a〜242fの駆動状態が不安定とされた場合でも、前述の如く、スイッチング回路Tra〜Trfは、新たに設けられた吸収ダイオードD2a〜D2fの吸収作用によって、出力電流ILのノイズ成分が効果的に吸収され、安定的な駆動状態に改善される。
【0035】
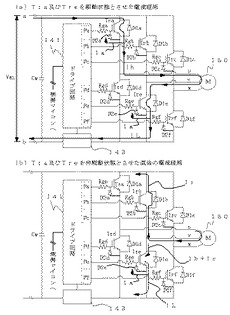
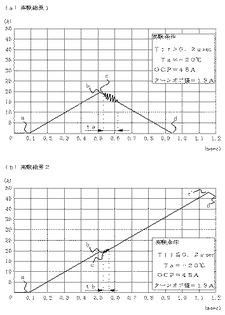
図4を参照して、吸収ダイオードD2nの逆回復時間Trrとドライブ回路141の動作について説明する。同図では、ドライブ回路141の動作を解析するために、インバータ回路240の制御を簡素化して、以下の如く実験が行われる。即ち、インバータ回路240に接続される制御マイコン10は、全てのスイッチング素子Tra〜TrfをOFF状態とさせる初期状態の制御モードと、スイッチング素子Tra及びTreのみをON状態とさせるターンオン状態の制御モードと、ターンオン状態の後にスイッチング素子Tra及びTreを含む全てのスイッチング素子TrnをOFF状態とさせるターンオフ状態の制御モードとを実行させる。また、制御マイコン10は、ドライブ回路141の出力信号に基づき、初期状態→ターンオン状態→ターンオフ状態へとスイッチング素子Trnを駆動させる。その後、リカバリ電流に起因しドライブ回路141の誤動作が生じる場合、コレクタ電流が限界電流値へ到達されないにも関わらず、制御マイコン10は、全てのスイッチング素子TrnをOFF状態とさせる。このとき、かかる動作モードを誤動作時の強制停止モードと呼ぶ。また、リカバリ電流が生じてもドライブ回路141の誤動作が生じない場合、制御マイコン10は、所定時間経過後、再びスイッチング素子Tra及びTreをターンオン状態とさせ、スイッチング素子Treのコレクタ電流が限界電流値に到達するのを待ち、OCP(Over Current Protector)機能によって全てのスイッチング素子Trnを強制停止させる。このとき、かかる動作モードを正常時の制御モードと呼ぶ。ここで、本実験では、インバータ回路240におけるV相電源ラインvのプロービングを行い、スイッチング素子Treが19Aに到達する際、制御マイコン10が一時的にスイッチング素子Trnをターンオフ状態とさせる。また、限界電流値とは、スイッチング素子Treの出力電流ILに係る上限の臨界値をコレクタ電流に換算した電流値であって、本実験では48Aと規定される。更に、本実験では、電流値を測定する際の環境温度Taをマイナス20℃にて実施する。そして、本実験では、逆回復時間が相異なる複数種類のダイオードを用い、逆回復時間Trrを変動させて実験を行い、それぞれの逆回復時間Trrについてドライブ回路141の動作解析を行った。そして、ドライブ回路141の動作は逆回復時間Trr=0.2μsecを境界として異なる挙動を示すことが、かかる実験の集計結果により判明した。以下、図4(a)の実験結果1では、逆回復時間Trrが0.2μsec以上の吸収ダイオードを選択した際のコレクタ電流の状態について説明する。また、図4(b)の実験結果2では、逆回復時間Trrが0.2μsec以下の吸収ダイオードを選択した際のコレクタ電流の状態について説明する。尚、逆回復時間Trrとは、ダイオードに対して順方向バイアスから瞬時に逆方向バイアスを与えると、半導体の内部に存在するキャリアが拡散し、このとき、逆バイアス方向に流れるリカバリ電流が発現してから収束又はゼロクロスするまでの時間を言う。
【0036】
図4(a)を参照して、吸収ダイオードD2nの逆回復時間Trrが0.2μsec以上に設定された場合について説明する。尚、前述した初期状態では、負荷とされる制御モータ150は、停止状態とされ、内蔵されるコイルにエネルギーが蓄積されていない状態とされる。図示の如く、スイッチング素子Treに流れるコレクタ電流は、スイッチング素子Tra及びTreの駆動状態に応じて以下の如く発生する。即ち、グラフの原点部からa点迄の区間では、制御マイコン10の制御モードが初期状態とされるので、全てのスイッチング素子TrnがOFF状態とされている。このとき、V相電源ラインvでは、電流の変化が一切観測されず、コレクタ電流は検出されない。その後、a点からb点迄の区間では、制御マイコン10の制御モードがターンオン状態とされるので、スイッチング素子Tra及びTreがON状態とされる。このとき、スイッチング素子Treのコレクタ電流は、コイルのインダクタンスに応じて一定の勾配を維持させ増加する。かかる後、コレクタ電流は、増加を続けてターンオフ値とされる19Aに到達する。このとき、インバータ回路240は、ターンオフ状態とされるので、スイッチング素子Tra及びTreも併せてOFF状態とされる。これにより、b点からc点迄の区間では、制御モータ150の回生動作によってコイルに蓄積されたエネルギーが開放され、コレクタ電流が一定勾配にて減少する。然る後、制御マイコン10がインバータ回路240を再びターンオン状態とさせる制御モードへと移行する。しかし、図示の如く、c点直後には、高周波のリカバリ電流が一定時間ta発生する。このとき、かかるリカバリ電流の状態如何によってドライブ回路141の誤動作を誘発させるか否かが画定する。逆回復時間Trrが0.2μsec以上の場合に発生するリカバリ電流では、当該リカバリ電流に起因するノイズ状態がドライブ回路141を誤動作させる程度に影響を及ぼす。従って、c点からd点迄の区間では、ドライブ回路141が誤動作を起こし、制御マイコン10が誤動作時の強制停止モードに移行するので、全てのスイッチング素子Tra〜TrfをOFF状態とさせる。このとき、コレクタ電流は、b点からc点迄の減少勾配より大きな勾配にて減少する。かかる如く、吸収ダイオードD2nの逆回復時間Trrが0.2μsec以上とされる場合、リカバリ電流に起因するノイズが顕著に現れ、ドライブ回路141の誤動作を伴って、インバータ回路240の動作が安定的に行われないことが解る。
【0037】
図4(b)を参照して、吸収ダイオードD2nの逆回復時間Trrが0.2μsec以下に設定された場合について説明する。先ず、グラフの原点部からa点迄の区間では、インバータ回路240が初期状態とされるので、コレクタ電流は一切検出されない。その後、a点からb点迄の区間では、インバータ回路240がターンオン状態とされ、コレクタ電流は一定の勾配にて増加する。かかる後、コレクタ電流は増加を続けて19Aに到達する。このとき、インバータ回路240は、インバータ回路240がターンオフ状態とされるので、スイッチング素子Tra及びTreを一時的にOFF状態とさせる。かかるスイッチング状態が一定時間維持されるため、b点からc点迄の区間では、制御モータ150の回生動作によって、コレクタ電流が一定勾配にて減少していく。然る後、c点直後では、前述の如くインバータ回路240がターンオン状態へと移行するため、スイッチング素子Tra及びTreが再びON状態とされる。逆回復時間Trrが0.2μsec以下に設定された本実験の場合であっても、c点直後にはリカバリ電流に起因するノイズが重畳される。但し、かかるリカバリ電流は、ノイズの発生値又は発生時間tbが抑制され、コレクタ電流に重畳されるノイズ成分がドライブ回路141を誤動作させない程度にまで改善される。従って、c点からc’点迄の区間では、スイッチング素子Tra及びTreのON状態が維持され、コレクタ電流が一定の勾配にて増加する。そして、コレクタ電流が限界電流値まで到達するc’点では、制御マイコン10が正常時の強制停止モードへ移行するので、これにより、c’点以後では、スイッチング素子Treのコレクタ電流が一定勾配にて減少し始める。かかる如く、吸収ダイオードD2nの逆回復時間Trrが0.2μsec以下に設定された場合、リカバリ電流が多少発生しても、コレクタ電流に重畳されるノイズの状態が抑制されているので、ドライブ回路141が誤動作することなく、インバータ回路240の動作の安定化が図られる。以上より、本実施の形態に用いるべき最善の吸収ダイオードD2nには、逆回復時間Trrを0.2μsec以下の範囲に設定させるのが好ましい。尚、前述の如く、本実験では、環境温度Taをマイナス20℃とした測定結果がそれぞれ示されているので、本実施の形態に係る制御モータ駆動装置200は、低温環境下における使用場面であっても、リカバリ電流に起因して生じるノイズの状態が十分に抑えられ、制御モータ150を安定的に駆動させていることが解る。
【0038】
本実施の形態によれば、スイッチング素子Tra〜Trfから出力される出力電流にノイズが重畳される場合であっても、吸収ダイオードD2nによって、当該出力電流のノイズ成分がゲートへフィードバックされ、ゲート電位がフィードバックされた電流値に応じて増加されるので、スイッチング素子Trnに発生する固有振動が同期的に抑制され、これにより、スイッチング素子Trnで出力される出力電流のノイズ成分が低減される。また、吸収ダイオードD2nによって出力電流のノイズ成分が抑えられると、電流検出回路143で検出される出力電流ILの波形が安定し、ドライブ回路141の内部に生じるスパイクノイズが抑えられるので、出力部141a及び出力部141bから出力されるスイッチング素子駆動信号Trnの波形状態が安定化され、これに応じて、スイッチング素子Trnに生じる固有振動が低減され、スイッチング素子Trnの出力電流の状態が更に安定化される。更に、本実施の形態に係る制御モータ駆動装置200が寒冷地で使用される場合であっても、上述に記す如く、吸収ダイオードD2nにおける吸収作用によって、出力電流Ih又はILの電流が低減され、制御モータ150が安定的に駆動される。
【0039】
また、上述の如く、スパイクノイズの発生レベルが低減されると、スイッチング素子駆動信号の波形状態が安定化され、スイッチング素子Trnの出力電流のノイズ成分が抑制されるといった具合に、かかる改善現象が好循環的に進行するので、ドライブ回路141は出力電流ILのノイズに基づく誤検出から保護され、不要に停止指令信号SGsを出力することが無くなる。これにより、制御モータ駆動装置200は、定常時において不必要な停止動作を指示すること無く安定的に制御モータ150を駆動させ、非常時においてのみ必要に応じて制御モータ150を停止させることが可能とされる。
【0040】
更に、インバータ回路240のスイッチ回路242a〜242fを切り替えることによってリカバリ電流Icが発生し、駆動されたスイッチング素子Tra〜Trfに出力電流Ihとリカバリ電流Icとの双方が流入する場合でも、当該スイッチング素子にて出力される出力電流ILのノイズ成分は、吸収ダイオードD2d〜D2fによってスイッチング素子Trd〜TrfのゲートGへフィードバックされ、これにより、スイッチング素子Trd〜Trfにおける出力電流ILのノイズレベルが緩和される。インバータ回路240の誤動作により、一方のスイッチング素子Tra〜Trcとこれに接続される他方のスイッチング素子Trd〜Trfとが同一相短絡を起こした場合であっても、出力電流ILのノイズ成分をスイッチング素子Trd〜TrfのゲートGへフィードバックさせ、スイッチング素子240の焼損から保護することが期待できる。
【0041】
加えて、寄生インダクタンスによってスイッチング素子Tra〜Trfのエミッタ電位が上昇する場合であっても、吸収ダイオードの作用によって、ゲート−エミッタ間の入力容量に蓄積された電荷量が低減されるので、ゲート電位が上昇し、出力電流ILのノイズ成分が低下される。
【0042】
以上の如く記された実施の形態はあくまでも本発明の一つの実施形態であって、本発明はこれに限らず他の実施形態を適用させることが可能である。例えば、本実施の形態では供給させる電源を商用の交流電源110としているが、これに限らず、供給電源を車両に搭載されるバッテリー等に置き換え、これにより、整流回路130を省略させた新たな制御モータ駆動装置としても良い。また、本実施例における制御モータ駆動装置130では、力率改善回路130においてPWM波形制御を実施させているが、これに限らず、ドライブ回路141から直接PWM波形制御を行う構成としても良い。
【0043】
尚、本発明ないし各構成要件の用語の意義は、上述した実施の形態に記載されたものに限られるものではない。例えば、本実施の形態では、力率改善回路130に設けられる波形制御部131は、PWM波形制御に基づいてスイッチング素子Trwを駆動させるようにしているが、これに限らず、PAM(Pulse Amplitude Modulation)波形制御に基づいてスイッチング素子Trwを駆動させるようにしても良く、この他あらゆる波形制御法が適用される。また、制御モータ150とは、インバータ制御によって駆動されるモータ全般を指し、本実施の形態に記される三相交流モータに限らず、多相交流モータ又は単層モータ、この他、様々な種類のモータが用いられる。
【図面の簡単な説明】
【0044】
【図1】実施の形態に係る制御モータ駆動装置の構成を示す図
【図2】実施の形態に係るスイッチ回路を示す図
【図3】実施の形態に係る制御モータ駆動装置の動作状態を示す図
【図4】実施の形態に係るスイッチング素子でのコレクタ電流の電流値を示す図
【図5】従来例に係る制御モータ駆動装置の構成を示す図
【図6】従来例に係る制御モータ駆動装置の動作状態を示す図
【符号の説明】
【0045】
10 制御マイコン
110 交流電源
120 整流回路
130 力率改善回路
200 制御モータ駆動装置
240 インバータ回路
141 ドライブ回路
150 制御モータ
242n スイッチ回路
Trn スイッチング素子
G ゲート
C コレクタ
E エミッタ
Rgn 調整抵抗
D1n 帰還ダイオード
D2n 吸収ダイオード
143 電流検出回路
【技術分野】
【0001】
本発明は、制御モータ駆動装置に関し、特にインバータ回路内に流れる電流のノイズによって発生する制御モータの誤作動を解消させる際に用いて好適なものである。
【背景技術】
【0002】
従来より、制御モータの駆動によって生じる騒音又はトルク斑を解消させる技術として、制御モータをインバータ制御させる制御モータ駆動装置の研究及び開発が進められている。かかる制御モータ駆動装置は、例えば、空調装置に設けられるコンプレッサ、洗濯機に設けられるドラム駆動モータ、車両用駆動モータ等、広範な技術分野に亘り広く利用されている。
【0003】
特開2002−159194(特許文献1)では、制御モータ駆動装置の技術を用いたインバータ制御システムが示されている。図5を参照して特許文献1の技術に係るインバータ駆動システムの構成を説明する。尚、同図において、スイッチング素子群140を構成する複数のユニットを、それぞれスイッチ回路140a〜140fとして以下説明する。図示の如く、インバータ駆動システム100は、交流電源110と整流回路120とアクティブコンバータ回路130(特許請求の範囲における力率改善回路)とスイッチング素子群140(特許請求の範囲における複数のスイッチ回路)とドライブ回路141と制御マイコン142と電流検出回路143と制御モータ150とから構成されている。かかる整流回路120は交流電源110の負の成分を正の成分に変換しリップル電圧を生成する。アクティブコンバータ回路130はリップル電圧を平滑化し制御マイコン142に基づいてPWM波形制御を行う。スイッチング素子群140を構成するそれぞれのスイッチ回路140a〜140fは、IGBTによって成るスイッチング素子Tra〜Trfから構成され、ドライブ回路141によって駆動される。
【0004】
制御マイコン142は、ドライブ回路141と電流検出回路143と力率改善回路131(実施の形態における波形制御部)がそれぞれ接続されており、外部から供給される指令回転数を受信してドライブ回路及び力率改善回路131を駆動させる機能を備える。ドライブ回路141では、制御マイコン142から送信されるドライブ回路駆動信号SGmに応じて、出力ポートからスイッチング素子駆動信号SGa〜SGfを出力させる。
【0005】
ドライブ回路141は、ドライブ回路駆動信号SGmに基づいて、High−Low信号から成るスイッチング素子駆動信号SGa〜SGfをそれぞれ出力する。具体的にはスイッチング素子駆動信号SGa〜SGfの出力パターンが複数規定されており、このうち、第1の駆動状態では、スイッチング素子駆動信号SGa及びSGeのみHigh信号を出力し、スイッチ回路140a及びスイッチ回路140eのみを駆動状態とさせる。また、第2の駆動状態では、スイッチ回路140aとスイッチ回路140fを駆動状態とさせる。更に、第3の駆動状態では、スイッチ回路140fとスイッチ回路140bを駆動状態とさせる。加えて、第4の駆動状態では、スイッチ回路140bとスイッチ回路140dを駆動状態とさせ、第5の駆動状態では、スイッチ回路140cとスイッチ回路140dを駆動状態とさせ、第6の駆動状態では、スイッチ回路140cとスイッチ回路140eを駆動状態とさせる。そして、ドライブ回路141は、第1の駆動状態から順次切換操作を行い、第6の駆動状態とされた後に再び第1の駆動状態へ復帰させ、これにより、インバータ回路140の循環制御を行う。
【0006】
図6にはインバータ制御システム100の一部拡大図が示されており、併せて、スイッチング素子群の駆動状態が説明されている。尚、同図では、ドライブ回路141に出力ポートPa〜Pfを追加図示して説明する。図6(a)に示す如く、第1の駆動状態とされたスイッチング素子群140では、スイッチ回路140a及びスイッチ回路140eが駆動状態とされ、その他のスイッチ回路が非駆動状態とされる。この場面では、スイッチング素子群140には変調電位Vmが印加されている。従って、スイッチング素子群140を流れる電流は、当該電流の値を変えつつ、起点a→スイッチング素子Tra→制御モータ150→スイッチング素子Tre→電流検出回路143→終点bへと導かれる。このとき、電流検出回路143は、出力電流ILを検出し、これによって検出された電流値を制御マイコン142へ出力する。そして、制御マイコン142では、検出された電流値が予め規定された限界電流値より大きい場合には、制御モータ150を予め規定された停止モードに従いドライブ回路141を制御する。
【0007】
これに対し、図6(b)ではスイッチング素子群140に係る第2の駆動状態が説明されている。制御モータ150は、図示しない内部コイルが回転運動を持続し、U相電源ラインuとV相電源ラインvとの間に回生起電力を生じさせる。従って、図6(b)で示される様に、スイッチング素子群140を流れる電流Irは、制御モータ150からスイッチ回路140bへと導かれ、帰還ダイオードD1bを通過する。
【0008】
かかる技術におけるインバータ制御システム100では好応答性が要求される装置であるため、本来、ドライブ回路141の出力ポートとスイッチング素子のゲートとの間には、ゲート電位を低下させる不要な素子を排除させた構成とするのが好ましい。具体的には、スイッチング素子Tra〜Trfの切替速度を向上させるため、出力ポートとスイッチング素子のゲートとの間の抵抗値をできるだけ低く設定させるのが好ましい。しかし、かかる抵抗値が低く設定されると、スイッチング素子駆動信号SGa〜SGfへ重畳されたノイズは、インバータ回路の構成上コモンモードノイズを誘発させるので、制御モータ駆動装置の周辺に配備される各種電子機器にノイズ障害を誘発させるとの問題が生じる。
【0009】
そこで、上述の問題を回避するため、特開2005−020919(特許文献2)では、コモンモードノイズを低減させる技術が記されている。即ち、インバータ部を構成する各スイッチング素子は、当該スイッチング素子のエミッタからコレクタへ向かって順方向に接続されたダイオード(特許請求の範囲における帰還ダイオード)を備え、更に、スイッチング素子のゲート側に抵抗(特許請求の範囲における調整抵抗)が接続されている。従って、ゲート抵抗によりスイッチング素子駆動信号SGa〜SGfに重畳されるノイズが低減されるので、これに呼応しコモンモードノイズが抑制され、周辺機器のノイズ障害を回避することができる。
【0010】
【特許文献1】特開2002−159194号公報
【特許文献2】特開2005−020919号公報
【発明の開示】
【発明が解決しようとする課題】
【0011】
しかしながら、特許文献2の制御モータ駆動装置では、ノイズの変動値を考慮に入れて調整抵抗の抵抗値を過大設計させると、スイッチング素子のゲートに印加されるゲート電位が低下し、スイッチング素子の閾値電位に対するゲート電位のアドバンテージが十分に確保できなくなる。このようなスイッチ回路では、スイッチング素子のゲートで固有振動が発生し、当該固有振動に応じてエミッタから出力される出力電流にノイズが重畳される。かかるノイズは、調整抵抗の抵抗値に比例して顕著に発現し、ドライブ回路の内部でスパイクノイズを誘発させるので、ドライブ回路から出力されるスイッチング素子駆動信号にノイズが重畳され、結果的に、スイッチング素子におけるゲート電位の振動を励起させてしまうとの問題を招く。
【0012】
また、恒久的なサイクルで出力電流にノイズが重畳されると、ドライブ回路は慢性的に停止指令信号を制御マイコンへ出力させるので、かかる制御モータ駆動装置では、制御モータの安定的な駆動状態を得られなくなるとの問題が生じる。
【0013】
更に、図6(b)に示される如く、制御モータの回生起電力によって帰還ダイオードにキャリアが注入されるので、かかる後、キャリアが蓄積された帰還ダイオードでは、キャリアの拡散に伴って急峻なリカバリ電流が発生する。従って、キャリアの拡散経路に接続されたスイッチング素子が駆動されると、スイッチング素子のコレクタ−ゲート間の電位差が急変動し、これによっても、スイッチング素子から出力される出力電流にノイズが重畳されてしまうとの問題が生じる。
【0014】
加えて、スイッチング素子のエミッタと電流検出回路とを接続させる電源ラインには回避できない寄生インダクタンスが存在し、かかる寄生インダクタンスは、エミッタの出力電流の増加に応じてエミッタ電位を増加させる。このとき、特許文献2の制御モータ駆動装置では、出力電流が流れ始めると、エミッタ電位の上昇によってゲート−エミッタ間の寄生容量である入力容量Ciesに電荷が蓄積されゲート側が負にバイアスされる。これにより、ゲート電位が低下しスイッチング素子の閾値電位を下回ると、スイッチング素子は一時的に非駆動状態とされる。その直後、出力電流の減少に伴いエミッタ電位が減少し、これ応じて、ゲート電位が上昇して閾値電位を上回り、スイッチング素子は再び駆動状態とされる。その後、スイッチング素子はエミッタから出力電流を出力させ、再度エミッタ電位が上昇する。然して、これらの動作が繰り返されスイッチング素子のゲートが振動する場合、出力電流には上述したノイズと同様の波形成分が重畳されてしまうとの問題が発生する。
【0015】
更に加えて、スイッチング素子の選択基準によっては順伝達コンダクタンスが低値とされる場合がある。かかる場合、当該スイッチング素子の駆動周波数が大きくなり、これにより、スイッチング素子の出力電流に重畳されるノイズは、ゲート信号に対する位相差が大きくなるため、発振状態に入る危険性が非常に高くなる。そして、出力電流のノイズが発振状態に入ると、ドライブ回路では誤動作を生じ、その結果、制御マイコンがインバータ回路の動作を停止させてしまうとの問題も生じる。
【0016】
更に、IGBTを採用したスイッチング素子は、環境温度が低下していくと、ゲート電位が一定であっても相互コンダクタンスが変動する性質を有している。従って、制御モータを寒冷地で用いる際、スイッチング素子では、相互コンダクタンスが変動することにより、設計上では回避されていた共振点を遷移するノイズモードが発生し、これにより、インバータ回路では、スイッチング素子の出力電流にノイズが重畳され、制御モータを停止させてしまうとの問題を招来させる。また、かかる問題は、摂氏マイナス10度以下の環境で制御モータ駆動装置を使用する際、顕著に現れると発明者より報告されている。
【0017】
本発明は上記課題に鑑み、インバータ回路におけるスイッチング素子の出力電流に発生するノイズを同期的に低減させ、インバータ回路によって駆動される制御モータの誤作動を有効に防止し得る制御モータ駆動装置の提供を目的とする。
【課題を解決するための手段】
【0018】
上記課題を解決するため、本発明では次のような制御モータ駆動装置の構成とする。すなわち、整流回路を介して交流電源に接続される力率改善回路と、前記力率改善回路及び制御モータのそれぞれに接続されるインバータ回路とから成り、前記インバータ回路は制御マイコンに接続されたドライブ回路と前記ドライブ回路にそれぞれ接続された複数のスイッチ回路と前記ドライブ回路に接続された電流検出回路とを備え、前記複数のスイッチ回路のそれぞれは、ゲートに接続される調整抵抗とエミッタ−コレクタ間に接続される帰還ダイオードとゲート−エミッタ間に接続される吸収ダイオードとを備えるスイッチング素子から構成されることとする。このとき、前記吸収ダイオードは、逆回復時間が0.2μsec以下である性質を有しているのが好ましい。また、前記スイッチング素子は、順伝達コンダクタンスが6.1〜10(S)の範囲であるのが好ましい。更に、前記制御モータ駆動装置は、摂氏マイナス10度以下の環境で用いられる場合に好適である。
【発明の効果】
【0019】
本発明によれば、スイッチング素子から出力される出力電流にノイズが重畳される場合であっても、吸収ダイオードによって、当該出力電流のノイズ成分がゲートへフィードバックされ、ゲート電位がフィードバックされた電流値に応じて増加されるので、スイッチング素子に発生する固有振動が同期的に抑制され、これにより、スイッチング素子で出力される出力電流のノイズ成分が低減される。また、吸収ダイオードによって出力電流のノイズ成分が抑えられると、電流検出回路によって得られる電流値の波形が安定し、ドライブ回路の内部に生じるスパイクノイズが抑えられるので、ドライブ回路から出力されるスイッチング素子駆動信号の波形状態が安定し、これに応じて、スイッチング素子に生じる固有振動が低減され、スイッチング素子の出力電流の波形が更に安定化される。更に、本発明に係る制御モータ駆動装置が寒冷地で使用される場合であっても、上述に記す如く、吸収ダイオードにおける吸収作用によって、出力電流の電流が低減され、制御モータが安定的に駆動される。
【0020】
また、上述の如く、スパイクノイズの発生レベルが低減されると、スイッチング素子駆動信号の波形状態が安定化され、スイッチング素子の出力電流のノイズ成分が抑制されるといった具合に、かかる改善現象が好循環的に進行するので、ドライブ回路は出力電流のノイズに基づく誤検出から保護され、不要に停止指令信号を出力することが無くなる。これにより、制御モータ駆動装置は、定常時において不必要な停止動作を指示すること無く安定的に制御モータを駆動させ、非常時においてのみ必要に応じて制御モータを停止させることが可能とされる。
【0021】
更に、駆動されているスイッチング素子に出力電流とリカバリ電流との双方が流入する場合でも、当該スイッチング素子にて出力される出力電流のノイズ成分は、吸収ダイオードによってスイッチング素子のゲートへフィードバックされ、これにより、スイッチング素子における出力電流のノイズレベルが緩和される。また、インバータ回路の誤動作により、一方のスイッチング素子とこれに接続される他方のスイッチング素子とが同一相短絡を起こした場合であっても、出力電流のノイズ成分をスイッチング素子のゲートへフィードバックさせ、スイッチング素子の焼損から保護することが期待できる。
【0022】
加えて、寄生インダクタンスによってスイッチング素子のエミッタ電位が上昇する場合であっても、吸収ダイオードの作用によって、ゲート−エミッタ間の入力容量に蓄積された電荷量が低減されるので、ゲート電位が上昇し、出力電流のノイズ成分が低下される。
【発明を実施するための最良の形態】
【0023】
以下、本発明に係る実施の形態につき図面を参照して説明する。図1では本実施の形態に係る制御モータ駆動装置200の構成が示されている。図1に示す如く、制御モータ駆動装置200は、整流回路120を介して交流電源110に接続される力率改善回路130と、力率改善回路120及び制御モータ150のそれぞれに接続されるインバータ回路240とから構成されている。
【0024】
図示の如く、整流回路120は、ブリッジ回路部122とコンデンサCdとから構成されている。ブリッジ回路部122では複数のダイオードによってブリッジ回路部が形成されている。また、コンデンサCdはブリッジ回路部122の接点aと接点cとに並列接続されている。このとき同時に、接点aと接点cとの間には交流電源110が接続されている。更に、ブリッジ回路部122の接点bと接点dには力率改善回路130が接続されている。かかる構成により、コンデンサCdによって交流電源110のノイズ成分がフィルタリングされた後、ブリッジ回路部122の整流作用によって、交流電源110の供給電圧のうち正弦波の負成分が正成分に変換される。これにより、整流回路120では脈動波となるリップル電圧が生成され、かかるリップル電圧は力率改善回路130へ印加される。
【0025】
力率改善回路130は、チョークコイルLwとダイオードDwとスイッチング素子TrwとコンデンサCwと波形制御部131とから構成されている。また、力率改善回路130にはブリッジ回路部122の接点dに接続された高電源ラインhclと接点bに接続された低電源ラインlclとが配備されている。図示の如く、チョークコイルLw及びダイオードDwは高電源ラインhclに設けられている。このとき、チョークコイルLw及びダイオードDwは互いに直列接続され、これによって配置されたダイオードDwはカソードがインバータ回路240へと導通される。波形制御部131は、チョークコイルLwとダイオードDwとの両端に並列接続され、同時に、スイッチング素子Trwのゲートにも接続されている。かかるスイッチング素子Trwには、電気的にON/OFF制御を行うトランジスタが用いられ、例えば、MOSFET、バイポーラトランジスタ、IGBT等が一般的に用いられており、本実施の形態では、IGBTを採用することとする。スイッチング素子Trwは、チョークコイルLwとダイオードDwとの間にコレクタが接続され、低電源ラインlclにエミッタが接続される。また、コンデンサCwは、一方がダイオードDwのカソードと波形制御部131に導かれる配線接続部Xとの間に接続され、他方が低電源ラインlclに接続されている。即ち、スイッチング素子Trwのコレクタ−エミッタ間とコンデンサCwの各々は、ブリッジ回路部122の接点b−d間に並列接続される。かかる構成により、整流回路120から印加されたリップル電圧は、昇圧されると供に平滑化され、高電源ラインhclと低電源ラインlclとの両端において、略一定値の直流電圧に変換される。一方、波形制御部131では、入力されたリップル電圧と出力させる直流電圧とを比較し、PWM波形制御を伴って制御モータ150を駆動させる際に必要な電力を供給できるように力率を調整する。ここで、PWM(Pulse Wide Modulation)波形制御とは、波形制御部131からスイッチング素子Trwのゲートに駆動信号を出力し、スイッチング素子Trwを数KHz程度の高周波で駆動させる。そして、スイッチング素子Trwの断続的なON/OFF駆動によって、直流電圧をパルス波状の変調電位Vmに変換させる制御を言う。このとき、パルス波状の変調電位Vmは、PWM波形制御によって以下の如く変調され、インバータ回路240に印加される。即ち、制御モータ150を円滑な駆動状態とさせるために、変調電位Vmのパルス幅を電位の印加時間に対して連続的に増減させ、それぞれの単位パルス幅に対応する等価電位が正弦波状に分布する様にスイッチング素子Trwを駆動させる。このとき、変調電位Vmにおけるパルス波のデューティー比を変更することで正弦波に相当する電圧値が制御される。また、変調電位Vmにおけるパルス波のピッチを変更することで正弦波に相当する周波数成分が制御される。
【0026】
インバータ回路240は、制御マイコン10に接続されたドライブ回路141と、ドライブ回路141にそれぞれ接続された複数のスイッチ回路242a〜242fと、ドライブ回路141に接続された電流検出回路143とを備えている。また、力率改善回路130に配備される高電源ラインhclと低電源ラインlclとが各々延長して設けられている。更に、制御モータ150に接続されるU相電源ラインu及びV相電源ラインv及びW相電源ラインwが設けられ、この他、部品間を導通させる信号ライン及び電源ラインが適宜配線されている。
【0027】
図1に示す如く、ドライブ回路141には、出力ポートPa〜Pfが配備されている。そして、制御マイコン10から送信されるインバータ駆動信号SGmに応じて、出力ポートPa〜Pfからスイッチング素子駆動信号SGa〜SGfを出力させる。また、ドライブ回路141は、電流検出回路143によって検出された出力電流ILの電流値を検出する。更に、ドライブ回路141に格納される所定閾値と検出された電流値とを比較し、出力電流ILの電流値が所定閾値より大きい場合には、ドライブ回路141から制御マイコン10に向けて停止指令信号SGsを出力する。かかる場合、制御マイコン10では、停止指令信号SGsを受信し、予め規定された停止モードに準えて制御モータ150の制御を行う。尚、本実施の形態における、電流検出回路143の具体的な構成を示すと、例えば、所定の抵抗値を有する検出抵抗を配置させ、かかる検出抵抗の両端部をドライブ回路141の所定のポートへ接続させる構成により、検出抵抗を通過する出力電流ILの電流値が検出可能とされる。
【0028】
図2ではインバータ回路に複数配備されるスイッチ回路の単位構成が示されている。スイッチ回路242nは、ゲートGに接続される調整抵抗Rgnと、エミッタE−コレクタC間に接続される帰還ダイオードD1nと、ゲートG−エミッタE間に接続される吸収ダイオードD2nとを備えるスイッチング素子Trnから構成されている。尚、スイッチ回路242a〜242fは、それぞれ同一の構成とされるため、同図では、本来a〜fと標記されるべき部分を一般化して単にnと標記し、便宜的にスイッチ回路242nと示している。これに伴い、スイッチ回路242nの構成部品についても、スイッチング素子Trn及び調整抵抗Rgn及び帰還ダイオードD1nと一般化して標記する。図示の如く、スイッチング素子Trnは、ゲートGとコレクタCとエミッタEとを具備し、ゲートGに入力されたスイッチング素子駆動信号SGnに応じて駆動される。また、調整抵抗Rgnは、スイッチング素子TrnのゲートGに設けられ、信号ラインを介して一端がドライブ回路141の出力ポートに導通され他端がスイッチング素子TrnのゲートGに導通されている。また、帰還ダイオードD1nは、当該帰還ダイオードD1nのアノードがスイッチング素子TrnのエミッタEに接続されカソードがコレクタCに接続されている。更に、吸収ダイオードD2nは、当該吸収ダイオードD2nのアノードがスイッチング素子TrnのエミッタEに接続されカソードがコレクタCに接続されている。尚、スイッチング素子Trnには、電気的に駆動状態が制御されるMOSFET、バイポーラトランジスタ、IGBT等のトランジスタ、又は、GTO等のサイリスタ等が適宜用いられる。本実施の形態では、インバータ回路240に数百(V)程度の両端電圧が印加されるため、高電力を制御する際に好適なIGBTを用いるのが好ましい。また、調整抵抗Rgnは、抵抗値を少なくとも170Ω程度以上に設定するのが好ましい。より好ましくは、抵抗値を680Ω程度以上に設定する。これにより、スイッチング素子駆動信号SGa〜SGfに重畳されるノイズの値が低減されるので、回路内に生じるコモンモードノイズが低減され、制御モータ駆動装置の周辺電子機器へのノイズ障害を回避することが可能とされる。尚、吸収ダイオードD2nの特性にかかる好ましい態様については図4にて後述する。
【0029】
尚、制御モータ駆動装置200にあっては、出力効率を改善させるべく、スイッチング素子Trnの損失を抑制させる対策が施されるのが好ましい。ここで、低損失のスイッチング素子Trnを選定する場合、市販されている低損失タイプのスイッチング素子Trnでは、プレーナ型のIGBTが広く流通され、当該IGBTの順伝達コンダクタンスgfeが6.1〜10(S)とされている。かかる如く順伝達コンダクタンスgfeが低値に設定されたIGBTでは、当該IGBTの駆動周波数fmが大きくなる傾向を示す。かかる如く駆動周波数fmが大きくなると、IGBTの出力電流ILに重畳されるノイズは、ゲート信号に対する位相差を大きくさせるため、発振状態に入る危険性が非常に高くなる。かかる現象は、IGBTの順伝達コンダクタンスgfeが6.1〜8.05(S)とされる場合に極めて顕著に現れる。但し、本実施の形態では、順伝達コンダクタンスgfeの値が低いIGBTを選択する場合であっても、後述する吸収ダイオードD2nの作用によって、出力電流ILに重畳されるノイズの低減が有効に図られる。従って、本実施の形態に係る制御モータ駆動装置200では、かかるノイズの低減と出力効率の改善との双方の実現を可能とさせ得る。
【0030】
上述の如く構成されたスイッチ回路242a〜242fは、インバータ回路240において以下の様に適用される。図1に示す如く、スイッチ回路242a〜242fのそれぞれは、出力ポートPa〜Pfに対応して設けられている。このとき、スイッチング素子TraのエミッタEとスイッチング素子TrdのコレクタCとが電源ラインLuで結線される。一方、スイッチング素子TraのコレクタCには高電源ラインhclが接続され、他方、スイッチング素子TrdのエミッタEには低電源ラインlclが接続される。これと同じくして、スイッチ回路242bとスイッチ回路242e、及び、スイッチ回路242cとスイッチ回路242fとがそれぞれ電源ラインLv〜Lw等によって配線される。また、インバータ回路240は、U相電源ラインuとV相電源ラインvとW相電源ラインwとによって制御モータ150に接続されている。そして、かかる構成を具備するドライブ回路141は、インバータ駆動信号SGmに基づいてスイッチング素子駆動信号SGa〜SGfをそれぞれ出力する。具体的には、ドライブ回路141においてスイッチング素子駆動信号SGa〜SGfの出力パターンが複数規定されている。このうち、第1の駆動状態では、出力ポートPa及び出力ポートPeから、スイッチング素子駆動信号SGa及びスイッチング素子駆動信号SGeをHigh状態とさせて出力し、その他の出力ポートではスイッチング素子駆動信号SGnの波形をLow状態に維持させる。即ち、スイッチ回路242a及びスイッチ回路242eのみを駆動状態とさせる。また、第2の駆動状態では、スイッチ回路242aの駆動状態を維持させたまま、スイッチ回路242eの替わりにスイッチ回路242fを駆動状態とさせる。更に、第3の駆動状態では、スイッチ回路242fの駆動状態を維持させ、スイッチ回路242aの替わりにスイッチ回路242bを駆動状態とさせる。以降、上述の如く切換動作を行い、第4の駆動状態では、スイッチ回路242bとスイッチ回路242dを駆動状態とさせ、第5の駆動状態では、スイッチ回路242cとスイッチ回路242dを駆動状態とさせ、第6の駆動状態では、スイッチ回路242cとスイッチ回路eを駆動状態とさせる。そして、ドライブ回路141は、第1の駆動状態から順次切換操作を行い、第6の駆動状態とされた後に再び第1の駆動状態へ復帰させ、これにより、インバータ回路240の循環制御を行う。尚、かかる切換動作は、制御モータ150を駆動させる一例であって、本実施の形態におけるドライブ回路141では、この他、種々のインバータ回路240のスイッチング操作を適用できる。
【0031】
かかる構成により、制御モータ駆動装置200は以下の如く動作する。即ち、交流電源110から供給された正弦波状の電圧は、整流回路120にてリップル電圧に変換される。かかるリップル電圧は、力率改善回路130に印加され脈動成分が除去されるとともにPWM波形制御され、制御モータ150の制御状態に適合した変調電位Vmに変換される。その後、変調電位Vmはインバータ回路240に印加される。かかる状態において、インバータ回路240は、制御マイコン10から送信されるインバータ駆動信号SGmに基づいて、出力ポートPa〜Pfにてスイッチング素子駆動信号SGa〜SGfを出力させ、所望のスイッチ回路242a〜242fを駆動状態とさせる。
【0032】
ここで例えば、スイッチ回路242a〜242fの駆動パターンが第1の駆動状態とされる場合、図3(a)に示す如く、スイッチ回路242a及びスイッチ回路242eが駆動状態とされる。この場面では、先ず、出力電流Ihがスイッチング素子TraのエミッタEから出力される。出力電流Ihは、エミッタEを起点としU相電源ラインuを介して制御モータ150へと導かれ、その後、V相電源ラインvを介しスイッチング素子TreのコレクタCへと導かれる。そして、スイッチング素子Treでは、ゲートG−コレクタC間に生じた電位差に応じて出力電流ILを出力させる。更に、出力電流ILは、電流検出回路143に導かれる。但し、かかるスイッチング素子TraのエミッタEで出力される出力電流Ihにノイズが重畳される場合、スイッチング素子Traは更に以下の如く駆動される。即ち、出力電流Ihにノイズが重畳されると、エミッタEの電位状態がノイズの状態に応じて変動するので、エミッタE−ゲートG間の電位差もノイズ状態に応じて変動し、吸収ダイオードD2aを介してエミッタEからゲートGへ向かって吸収電流Ixが流れる。このとき、吸収電流Ixに応じてスイッチング素子Traへ印加されるゲート電位が増加するので、スイッチング素子Traが安定した駆動状態へと改善される。これにより、エミッタEにて出力される出力電流Ihは、スイッチング素子Traの駆動状態に同期してノイズ成分の値が低下される。また、吸収ダイオードD2a〜D2fは全てのスイッチ回路242a〜242fに設けられているので、スイッチング素子Treにおいても上述と同様の作用を受け、エミッタEにて出力される出力電流ILにあっても、スイッチング素子Treの駆動状態に同期してノイズ成分の値が低下される。従って、電流検出回路143ではノイズ成分が十分に抑えられた出力電流ILを検出することとなり、これにより、ドライブ回路141は、出力電流ILのノイズに基づく不要な停止指令信号SGsの出力から免れ、インバータ回路240の不具合が発生した場合にのみ適切な停止指令信号SGsを出力させる。
【0033】
図3(b)に示す如く、かかる第1の駆動状態が終了した後、スイッチ回路242nの駆動パターンが第2の駆動状態へと切り替えられる場合、制御モータ150では、図示しない内部コイルの回転運動が持続される。そして、U相電源ラインuとV相電源ラインvとの間に回生起電力を生じさせ、これによって生じた電流Irがインバータ回路240の内部を循環する。このとき、スイッチング素子Trbに導かれた電流Irは、帰還ダイオードD1bによってバイパスされて、スイッチング素子TrbのエミッタE−コレクタC間を通過する。従って、回生起電力が生じている状態では、電流Irによってキャリアが帰還ダイオードD1bに注入され続ける。その後、駆動パターンが切り替わり、帰還ダイオードD1bに注入されたキャリアが拡散される時に、スイッチング素子Trbへ直列接続されたスイッチング素子Treが駆動すると、スイッチング素子Treではリカバリ電流Icによって駆動状態が不安定とされ、出力電流ILにノイズを重畳させる。しかし、スイッチ回路242eの出力電流ILは、リカバリ電流Icによってノイズが重畳されたとしても、吸収ダイオードD2eによって吸収作用を受けるので、電流検出回路143ではノイズ成分が十分に抑えられた出力電流ILを検出することとなる。従って、ドライブ回路141は、出力電流ILのノイズに基づく不要な停止指令信号SGsの出力から免れ、インバータ回路240の不具合が発生した場合にのみ適切な停止指令信号SGsを出力させる。
【0034】
また、本実施の形態における制御モータ駆動装置200は、エアコン等の室外機と供に室外へ配置され低温環境下で使用される場合がある。このとき、スイッチング素子Tra〜Trfは、周期的な温度の変化に伴って相互コンダクタンスが変動し、設計上で回避されていた共振点を一時的に遷移し、これによって、出力電流ILにノイズを重畳させる場合がある。また、環境温度が著しく低下する場合にはスイッチング素子Tra〜Trfの閾値電圧Vthが上昇するので、運転状態若しくは環境状態の如何によって、かかる閾値電圧Vthとゲート部におけるゲート電位とが拮抗状態とされ、出力電流ILにノイズが重畳される場合もある。しかし、本実施の形態に係る制御モータ駆動装置200には、スイッチ回路242a〜242fのそれぞれに吸収ダイオードD2a〜D2fを備えた構成としているので、制御モータ駆動装置200における使用温度の低下に起因してスイッチ回路242a〜242fの駆動状態が不安定とされた場合でも、前述の如く、スイッチング回路Tra〜Trfは、新たに設けられた吸収ダイオードD2a〜D2fの吸収作用によって、出力電流ILのノイズ成分が効果的に吸収され、安定的な駆動状態に改善される。
【0035】
図4を参照して、吸収ダイオードD2nの逆回復時間Trrとドライブ回路141の動作について説明する。同図では、ドライブ回路141の動作を解析するために、インバータ回路240の制御を簡素化して、以下の如く実験が行われる。即ち、インバータ回路240に接続される制御マイコン10は、全てのスイッチング素子Tra〜TrfをOFF状態とさせる初期状態の制御モードと、スイッチング素子Tra及びTreのみをON状態とさせるターンオン状態の制御モードと、ターンオン状態の後にスイッチング素子Tra及びTreを含む全てのスイッチング素子TrnをOFF状態とさせるターンオフ状態の制御モードとを実行させる。また、制御マイコン10は、ドライブ回路141の出力信号に基づき、初期状態→ターンオン状態→ターンオフ状態へとスイッチング素子Trnを駆動させる。その後、リカバリ電流に起因しドライブ回路141の誤動作が生じる場合、コレクタ電流が限界電流値へ到達されないにも関わらず、制御マイコン10は、全てのスイッチング素子TrnをOFF状態とさせる。このとき、かかる動作モードを誤動作時の強制停止モードと呼ぶ。また、リカバリ電流が生じてもドライブ回路141の誤動作が生じない場合、制御マイコン10は、所定時間経過後、再びスイッチング素子Tra及びTreをターンオン状態とさせ、スイッチング素子Treのコレクタ電流が限界電流値に到達するのを待ち、OCP(Over Current Protector)機能によって全てのスイッチング素子Trnを強制停止させる。このとき、かかる動作モードを正常時の制御モードと呼ぶ。ここで、本実験では、インバータ回路240におけるV相電源ラインvのプロービングを行い、スイッチング素子Treが19Aに到達する際、制御マイコン10が一時的にスイッチング素子Trnをターンオフ状態とさせる。また、限界電流値とは、スイッチング素子Treの出力電流ILに係る上限の臨界値をコレクタ電流に換算した電流値であって、本実験では48Aと規定される。更に、本実験では、電流値を測定する際の環境温度Taをマイナス20℃にて実施する。そして、本実験では、逆回復時間が相異なる複数種類のダイオードを用い、逆回復時間Trrを変動させて実験を行い、それぞれの逆回復時間Trrについてドライブ回路141の動作解析を行った。そして、ドライブ回路141の動作は逆回復時間Trr=0.2μsecを境界として異なる挙動を示すことが、かかる実験の集計結果により判明した。以下、図4(a)の実験結果1では、逆回復時間Trrが0.2μsec以上の吸収ダイオードを選択した際のコレクタ電流の状態について説明する。また、図4(b)の実験結果2では、逆回復時間Trrが0.2μsec以下の吸収ダイオードを選択した際のコレクタ電流の状態について説明する。尚、逆回復時間Trrとは、ダイオードに対して順方向バイアスから瞬時に逆方向バイアスを与えると、半導体の内部に存在するキャリアが拡散し、このとき、逆バイアス方向に流れるリカバリ電流が発現してから収束又はゼロクロスするまでの時間を言う。
【0036】
図4(a)を参照して、吸収ダイオードD2nの逆回復時間Trrが0.2μsec以上に設定された場合について説明する。尚、前述した初期状態では、負荷とされる制御モータ150は、停止状態とされ、内蔵されるコイルにエネルギーが蓄積されていない状態とされる。図示の如く、スイッチング素子Treに流れるコレクタ電流は、スイッチング素子Tra及びTreの駆動状態に応じて以下の如く発生する。即ち、グラフの原点部からa点迄の区間では、制御マイコン10の制御モードが初期状態とされるので、全てのスイッチング素子TrnがOFF状態とされている。このとき、V相電源ラインvでは、電流の変化が一切観測されず、コレクタ電流は検出されない。その後、a点からb点迄の区間では、制御マイコン10の制御モードがターンオン状態とされるので、スイッチング素子Tra及びTreがON状態とされる。このとき、スイッチング素子Treのコレクタ電流は、コイルのインダクタンスに応じて一定の勾配を維持させ増加する。かかる後、コレクタ電流は、増加を続けてターンオフ値とされる19Aに到達する。このとき、インバータ回路240は、ターンオフ状態とされるので、スイッチング素子Tra及びTreも併せてOFF状態とされる。これにより、b点からc点迄の区間では、制御モータ150の回生動作によってコイルに蓄積されたエネルギーが開放され、コレクタ電流が一定勾配にて減少する。然る後、制御マイコン10がインバータ回路240を再びターンオン状態とさせる制御モードへと移行する。しかし、図示の如く、c点直後には、高周波のリカバリ電流が一定時間ta発生する。このとき、かかるリカバリ電流の状態如何によってドライブ回路141の誤動作を誘発させるか否かが画定する。逆回復時間Trrが0.2μsec以上の場合に発生するリカバリ電流では、当該リカバリ電流に起因するノイズ状態がドライブ回路141を誤動作させる程度に影響を及ぼす。従って、c点からd点迄の区間では、ドライブ回路141が誤動作を起こし、制御マイコン10が誤動作時の強制停止モードに移行するので、全てのスイッチング素子Tra〜TrfをOFF状態とさせる。このとき、コレクタ電流は、b点からc点迄の減少勾配より大きな勾配にて減少する。かかる如く、吸収ダイオードD2nの逆回復時間Trrが0.2μsec以上とされる場合、リカバリ電流に起因するノイズが顕著に現れ、ドライブ回路141の誤動作を伴って、インバータ回路240の動作が安定的に行われないことが解る。
【0037】
図4(b)を参照して、吸収ダイオードD2nの逆回復時間Trrが0.2μsec以下に設定された場合について説明する。先ず、グラフの原点部からa点迄の区間では、インバータ回路240が初期状態とされるので、コレクタ電流は一切検出されない。その後、a点からb点迄の区間では、インバータ回路240がターンオン状態とされ、コレクタ電流は一定の勾配にて増加する。かかる後、コレクタ電流は増加を続けて19Aに到達する。このとき、インバータ回路240は、インバータ回路240がターンオフ状態とされるので、スイッチング素子Tra及びTreを一時的にOFF状態とさせる。かかるスイッチング状態が一定時間維持されるため、b点からc点迄の区間では、制御モータ150の回生動作によって、コレクタ電流が一定勾配にて減少していく。然る後、c点直後では、前述の如くインバータ回路240がターンオン状態へと移行するため、スイッチング素子Tra及びTreが再びON状態とされる。逆回復時間Trrが0.2μsec以下に設定された本実験の場合であっても、c点直後にはリカバリ電流に起因するノイズが重畳される。但し、かかるリカバリ電流は、ノイズの発生値又は発生時間tbが抑制され、コレクタ電流に重畳されるノイズ成分がドライブ回路141を誤動作させない程度にまで改善される。従って、c点からc’点迄の区間では、スイッチング素子Tra及びTreのON状態が維持され、コレクタ電流が一定の勾配にて増加する。そして、コレクタ電流が限界電流値まで到達するc’点では、制御マイコン10が正常時の強制停止モードへ移行するので、これにより、c’点以後では、スイッチング素子Treのコレクタ電流が一定勾配にて減少し始める。かかる如く、吸収ダイオードD2nの逆回復時間Trrが0.2μsec以下に設定された場合、リカバリ電流が多少発生しても、コレクタ電流に重畳されるノイズの状態が抑制されているので、ドライブ回路141が誤動作することなく、インバータ回路240の動作の安定化が図られる。以上より、本実施の形態に用いるべき最善の吸収ダイオードD2nには、逆回復時間Trrを0.2μsec以下の範囲に設定させるのが好ましい。尚、前述の如く、本実験では、環境温度Taをマイナス20℃とした測定結果がそれぞれ示されているので、本実施の形態に係る制御モータ駆動装置200は、低温環境下における使用場面であっても、リカバリ電流に起因して生じるノイズの状態が十分に抑えられ、制御モータ150を安定的に駆動させていることが解る。
【0038】
本実施の形態によれば、スイッチング素子Tra〜Trfから出力される出力電流にノイズが重畳される場合であっても、吸収ダイオードD2nによって、当該出力電流のノイズ成分がゲートへフィードバックされ、ゲート電位がフィードバックされた電流値に応じて増加されるので、スイッチング素子Trnに発生する固有振動が同期的に抑制され、これにより、スイッチング素子Trnで出力される出力電流のノイズ成分が低減される。また、吸収ダイオードD2nによって出力電流のノイズ成分が抑えられると、電流検出回路143で検出される出力電流ILの波形が安定し、ドライブ回路141の内部に生じるスパイクノイズが抑えられるので、出力部141a及び出力部141bから出力されるスイッチング素子駆動信号Trnの波形状態が安定化され、これに応じて、スイッチング素子Trnに生じる固有振動が低減され、スイッチング素子Trnの出力電流の状態が更に安定化される。更に、本実施の形態に係る制御モータ駆動装置200が寒冷地で使用される場合であっても、上述に記す如く、吸収ダイオードD2nにおける吸収作用によって、出力電流Ih又はILの電流が低減され、制御モータ150が安定的に駆動される。
【0039】
また、上述の如く、スパイクノイズの発生レベルが低減されると、スイッチング素子駆動信号の波形状態が安定化され、スイッチング素子Trnの出力電流のノイズ成分が抑制されるといった具合に、かかる改善現象が好循環的に進行するので、ドライブ回路141は出力電流ILのノイズに基づく誤検出から保護され、不要に停止指令信号SGsを出力することが無くなる。これにより、制御モータ駆動装置200は、定常時において不必要な停止動作を指示すること無く安定的に制御モータ150を駆動させ、非常時においてのみ必要に応じて制御モータ150を停止させることが可能とされる。
【0040】
更に、インバータ回路240のスイッチ回路242a〜242fを切り替えることによってリカバリ電流Icが発生し、駆動されたスイッチング素子Tra〜Trfに出力電流Ihとリカバリ電流Icとの双方が流入する場合でも、当該スイッチング素子にて出力される出力電流ILのノイズ成分は、吸収ダイオードD2d〜D2fによってスイッチング素子Trd〜TrfのゲートGへフィードバックされ、これにより、スイッチング素子Trd〜Trfにおける出力電流ILのノイズレベルが緩和される。インバータ回路240の誤動作により、一方のスイッチング素子Tra〜Trcとこれに接続される他方のスイッチング素子Trd〜Trfとが同一相短絡を起こした場合であっても、出力電流ILのノイズ成分をスイッチング素子Trd〜TrfのゲートGへフィードバックさせ、スイッチング素子240の焼損から保護することが期待できる。
【0041】
加えて、寄生インダクタンスによってスイッチング素子Tra〜Trfのエミッタ電位が上昇する場合であっても、吸収ダイオードの作用によって、ゲート−エミッタ間の入力容量に蓄積された電荷量が低減されるので、ゲート電位が上昇し、出力電流ILのノイズ成分が低下される。
【0042】
以上の如く記された実施の形態はあくまでも本発明の一つの実施形態であって、本発明はこれに限らず他の実施形態を適用させることが可能である。例えば、本実施の形態では供給させる電源を商用の交流電源110としているが、これに限らず、供給電源を車両に搭載されるバッテリー等に置き換え、これにより、整流回路130を省略させた新たな制御モータ駆動装置としても良い。また、本実施例における制御モータ駆動装置130では、力率改善回路130においてPWM波形制御を実施させているが、これに限らず、ドライブ回路141から直接PWM波形制御を行う構成としても良い。
【0043】
尚、本発明ないし各構成要件の用語の意義は、上述した実施の形態に記載されたものに限られるものではない。例えば、本実施の形態では、力率改善回路130に設けられる波形制御部131は、PWM波形制御に基づいてスイッチング素子Trwを駆動させるようにしているが、これに限らず、PAM(Pulse Amplitude Modulation)波形制御に基づいてスイッチング素子Trwを駆動させるようにしても良く、この他あらゆる波形制御法が適用される。また、制御モータ150とは、インバータ制御によって駆動されるモータ全般を指し、本実施の形態に記される三相交流モータに限らず、多相交流モータ又は単層モータ、この他、様々な種類のモータが用いられる。
【図面の簡単な説明】
【0044】
【図1】実施の形態に係る制御モータ駆動装置の構成を示す図
【図2】実施の形態に係るスイッチ回路を示す図
【図3】実施の形態に係る制御モータ駆動装置の動作状態を示す図
【図4】実施の形態に係るスイッチング素子でのコレクタ電流の電流値を示す図
【図5】従来例に係る制御モータ駆動装置の構成を示す図
【図6】従来例に係る制御モータ駆動装置の動作状態を示す図
【符号の説明】
【0045】
10 制御マイコン
110 交流電源
120 整流回路
130 力率改善回路
200 制御モータ駆動装置
240 インバータ回路
141 ドライブ回路
150 制御モータ
242n スイッチ回路
Trn スイッチング素子
G ゲート
C コレクタ
E エミッタ
Rgn 調整抵抗
D1n 帰還ダイオード
D2n 吸収ダイオード
143 電流検出回路
【特許請求の範囲】
【請求項1】
整流回路を介して交流電源に接続される力率改善回路と、前記力率改善回路及び制御モータのそれぞれに接続されるインバータ回路とから成り、前記インバータ回路は制御マイコンに接続されたドライブ回路と前記ドライブ回路にそれぞれ接続された複数のスイッチ回路と前記ドライブ回路に接続された電流検出回路とを備え、前記複数のスイッチ回路のそれぞれは、ゲートに接続される調整抵抗とエミッタ−コレクタ間に接続される帰還ダイオードとゲート−エミッタ間に接続される吸収ダイオードとを備えるスイッチング素子から構成されていることを特徴とする制御モータ駆動装置。
【請求項2】
前記吸収ダイオードは、逆回復時間が0.2μsec以下である性質を有することを特徴とする請求項1に記載の制御モータ駆動装置。
【請求項3】
前記スイッチング素子は、順伝達コンダクタンスが6.1〜10(S)の範囲であることを特徴とする請求項1または請求項2に記載の制御モータ駆動装置。
【請求項4】
前記制御モータ駆動装置は、摂氏マイナス10度以下の環境で用いられることを特徴とする請求項1乃至請求項3に記載の制御モータ駆動装置。
【請求項1】
整流回路を介して交流電源に接続される力率改善回路と、前記力率改善回路及び制御モータのそれぞれに接続されるインバータ回路とから成り、前記インバータ回路は制御マイコンに接続されたドライブ回路と前記ドライブ回路にそれぞれ接続された複数のスイッチ回路と前記ドライブ回路に接続された電流検出回路とを備え、前記複数のスイッチ回路のそれぞれは、ゲートに接続される調整抵抗とエミッタ−コレクタ間に接続される帰還ダイオードとゲート−エミッタ間に接続される吸収ダイオードとを備えるスイッチング素子から構成されていることを特徴とする制御モータ駆動装置。
【請求項2】
前記吸収ダイオードは、逆回復時間が0.2μsec以下である性質を有することを特徴とする請求項1に記載の制御モータ駆動装置。
【請求項3】
前記スイッチング素子は、順伝達コンダクタンスが6.1〜10(S)の範囲であることを特徴とする請求項1または請求項2に記載の制御モータ駆動装置。
【請求項4】
前記制御モータ駆動装置は、摂氏マイナス10度以下の環境で用いられることを特徴とする請求項1乃至請求項3に記載の制御モータ駆動装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2008−178174(P2008−178174A)
【公開日】平成20年7月31日(2008.7.31)
【国際特許分類】
【出願番号】特願2007−7539(P2007−7539)
【出願日】平成19年1月17日(2007.1.17)
【出願人】(000109093)ダイヤモンド電機株式会社 (387)
【Fターム(参考)】
【公開日】平成20年7月31日(2008.7.31)
【国際特許分類】
【出願日】平成19年1月17日(2007.1.17)
【出願人】(000109093)ダイヤモンド電機株式会社 (387)
【Fターム(参考)】
[ Back to top ]