
制御モータ
【課題】回路基板の歩留まりを向上させることができる制御モータを提供する。
【解決手段】制御モータ10に備えられた回路基板16に、固定子12に設けられた巻線22の端部が電気的に接続された配線部50と、配線部50と電気的に接続されてモータの駆動を制御する駆動制御部52とを併有することにより、回路基板16の歩留まりを向上させることができる。
【解決手段】制御モータ10に備えられた回路基板16に、固定子12に設けられた巻線22の端部が電気的に接続された配線部50と、配線部50と電気的に接続されてモータの駆動を制御する駆動制御部52とを併有することにより、回路基板16の歩留まりを向上させることができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、固定子巻線へ給電する回路基板を備えた制御モータに関する。
【背景技術】
【0002】
特許文献1には、プリント基板に配設された配線パターンから固定子鉄心に設けられた巻線へ給電がなされる内転型モータが開示されている。このような制御モータにおいては、巻線の配置に対応させて円環状に配線パターンが配設されているので、プリント基板における配線パターンの内側(プリント基板中心部)が無駄な領域になり、回路基板としての歩留まりが低くなってしまう。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2001−314056号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明は係る事実を考慮し、回路基板の歩留まりを向上させることができる制御モータを提供することを課題とする。
【課題を解決するための手段】
【0005】
請求項1に記載の発明は、巻線が巻回されたコアを備えた固定子と、前記固定子に径方向に対向して配置され、軸線回りに回転可能に支持された回転子と、前記巻線の端部が電気的に接続された配線部と前記配線部と電気的に接続されてモータの駆動を制御する駆動制御部とを併有する回路基板と、を有する制御モータである。
【0006】
請求項1に記載の発明では、1つの回路基板が配線部と駆動制御部とを併有することにより、両者が別々に設けられている場合に比べて回路基板の歩留まりを向上させることができる。また、駆動制御部と配線部とを同一の回路基板に併設することにより、駆動制御部から配線部までの電気的経路を短くすることができる。
【0007】
請求項2に記載の発明は、前記巻線の端部が前記配線部に電気的に接続される結線部は、前記固定子の軸方向に対して前記固定子を投影した前記回路基板上に配置されている。
【0008】
請求項2に記載の発明では、固定子の軸方向に対して固定子を投影した回路基板上に結線部を配置することにより、結線部へ電気的に接続される巻線の端部の長さを短くすることができる。
【0009】
請求項3に記載の発明は、前記配線部は前記回路基板の外周部に環状に配置されていると共に、前記駆動制御部は前記配線部の内側に配置されている。
【0010】
請求項3に記載の発明では、配線部の内側の領域を、駆動制御部を配設する領域として有効利用することにより、回路基板の歩留まりを向上させることができる。また、駆動制御部を配線部の内側に配置することによって、駆動制御部を配線部の外側に配置するよりも、回路基板を小型化することができる。
【0011】
請求項4に記載の発明は、前記駆動制御部には、前記巻線に供給する電流の向きを切替える切替手段が配設されている。
【0012】
請求項4に記載の発明では、駆動制御部に切替手段を配設することにより、切替手段から配線部までの電気的経路を短くすることができる。
【図面の簡単な説明】
【0013】
【図1】本発明の実施形態に係る制御モータを示す斜視図である。
【図2】本発明の実施形態に係る制御モータを示す側断面図である。
【図3】本発明の実施形態に係る制御モータの一部を分解した状況を示す斜視図である。
【図4】本発明の実施形態に係る回路基板を示す正面図である。
【図5】本発明の実施形態に係る回路基板の表面を示す説明図である。
【図6】本発明の実施形態に係る回路基板の裏面を示す説明図である。
【発明を実施するための形態】
【0014】
図を参照しながら、本発明の実施形態について説明する。
【0015】
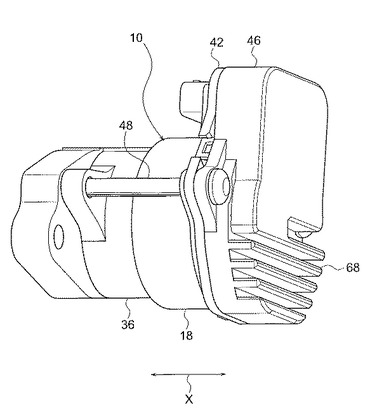
図1の斜視図には、制御モータ10が示されている。制御モータ10は、自動車に備えられたオイルポンプ駆動用のブラシレスモータであり、図2の側断面図に示すように、固定子としてのステータ12、回転子としてのロータ14、及び回路基板16を有している。
【0016】
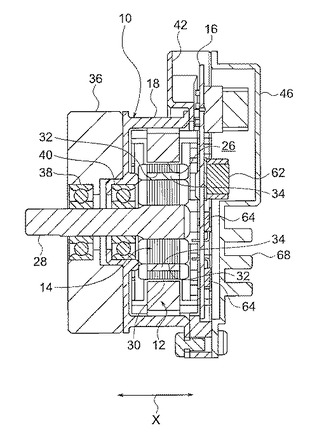
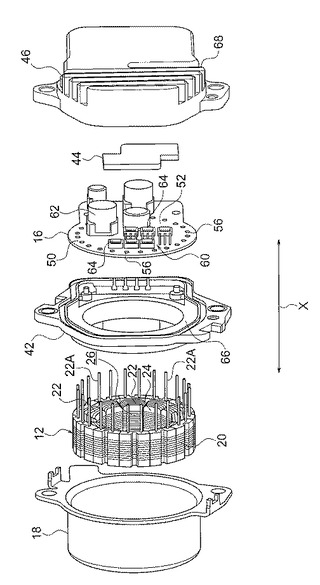
図2及び図3の分解斜視図に示すように、ステータ12は、円筒状のケース18内に収容されており、積層鉄心からなる円環状のコア20と、三相交流の電流が流れるU、V、W相の巻線22とによって構成されている。
【0017】
コア20は、ティース部24を円環状に複数配置することにより形成されており、ティース部24の内壁面によって貫通孔26が形成されている。
【0018】
ティース部24には、インシュレータを介して巻線22が巻回されており、図3に示すように、巻線22の端部22Aは、ステータ12の軸方向(以下、「方向X」とする)と略平行となるように回路基板16へ向かって略直線状に導出されている。
【0019】
図2に示すように、ロータ14は、シャフト28と、シャフト28の末端部に固定された円盤状の積層鉄心30とから構成されている。ロータ14は、シャフト28がステータ12の軸線と一致するように配置されている。積層鉄心30の外縁部近くには、X方向へ積層鉄心30を貫通する収容穴32が、積層鉄心30の周方向に対して等間隔に複数(例えば、4つ)形成されており、この収容穴32に永久磁石からなるロータマグネット34が収容され、接着剤等により収容穴32に固定されている。
【0020】
ロータ14は、ステータ12の貫通孔26の内側に配置されており、ロータ14(ステータ12)の半径方向に対して、ステータ12と対向している。また、ロータ14は、フレーム36に設けられた軸受け38と、ケース18に設けられた軸受け40とにシャフト28を回転支持することにより、ステータ12の軸を回転中心にして回転可能に配置されている。
【0021】
図2及び図3に示すように、フレーム36と逆側に位置するケース18の端部には、略環状に形成された樹脂製のホルダ42が配置されており、このホルダ42に形成された凹部66に回路基板16が固定されて保持されている。また、回路基板16を覆うようにして、冷却フィン68を備えた箱状のカバー46がパッド44を介して取り付けられており、図1に示すように、ボルト等の接合部材48により、フレーム36、ケース18、ホルダ42、及びカバー46が一体化されている。
【0022】
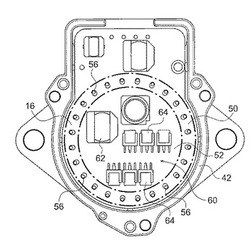
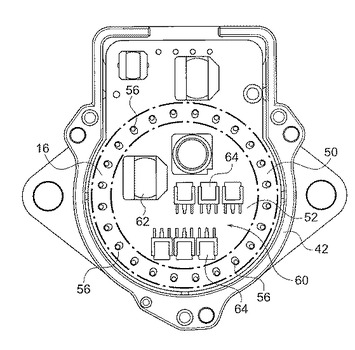
図4に示すように、回路基板16には、配線部としてのモータ配線部50と、駆動制御部としてのモータ駆動制御部52とを備えている。モータ配線部50は、回路基板16の外周部付近に円環状に配置されており、モータ駆動制御部52は、モータ配線部52の内側に並んで併設されている。すなわち、回路基板16は、モータ配線部50とモータ駆動制御部52とを併有し、モータ駆動制御部52は、回路基板16におけるモータ配線部50が配置されていない部分に配置されている。
【0023】
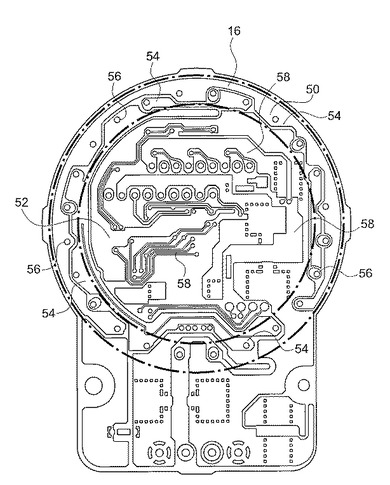
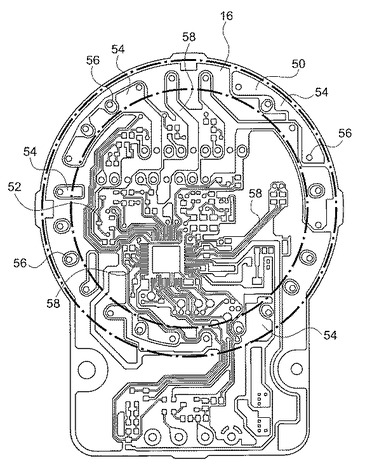
回路基板16の表面を描いた図5、及び回路基板16の裏面を描いた図6に示すように、モータ配線部50は、回路基板16に形成された配線パターン54を有しており、配線パターン54上に形成された結線部56には、巻線22の端部22A先端が電気的に接続されている。結線部56は、制御モータ10を組み上げた図2の状態において、X方向に対してステータ12を投影した回路基板16上の位置に配置されている。
【0024】
巻線22の端部22Aは(図3を参照のこと)、制御モータ10を組み上げた図2の状態において、X方向へホルダ42を貫通し、巻線22の端部22Aの先端が結線部56(図3、4を参照のこと)に電気的に接合されている。巻線22の端部22Aは、X方向に回路基板16へ向かってホルダ42を略直線状に貫通し、その状態で(巻線22の端部22Aが曲げられることなく)巻線22の端部22Aの先端が結線部56に電気的に接合されている。
【0025】
図4〜図6に示すように、モータ駆動制御部52は、回路基板16に形成され配線パターン54と電気的に接続されている配線パターン58、切替手段としてのインバータ装置60、モータ駆動制御装置62を有しており、インバータ装置60は、FET(電界効果トランジスタ)からなる6つのスイッチング素子64によって構成され、巻線22に供給する電流の向きを切替える。
【0026】
モータ駆動制御部52には、制御モータ10の外部からの電源線及び信号線(不図示)が電気的に接続されている。これによって、モータ駆動制御部52は、この信号線から送られてきた制御信号に応じて、モータ駆動制御部52と電気的に接続されたモータ配線部50を介して巻線22へ給電し、制御モータ10の駆動を制御する。
【0027】
次に、本実施形態の作用及び効果について説明する。
【0028】
本実施形態の制御モータ10では、図4に示すように、1つの回路基板16にモータ配線部50とモータ駆動制御部52とを一体的に備えて、1つの回路基板16がモータ配線部50とモータ駆動制御部52とを併有することにより、回路基板16における無駄な(モータ駆動に寄与しない)領域を減らし、又は無くすことができるので、モータ配線部50とモータ駆動制御部52とが別々に設けられている場合に比べて、回路基板16の製造における歩留まりを向上させることができる。また、モータ駆動制御部52とモータ配線部50とを並べて併設することにより、モータ駆動制御部52からモータ配線部50(結線部56)までの電気的経路を短くすることができる。
【0029】
また、モータ駆動制御部52を回路基板16に組み込むことによって、制御モータ10の外部にモータ駆動制御部52を設ける必要がなくなる。これによって、モータ駆動制御部52とモータ配線部50とを電気的につなぐモータ駆動電力供給用のワイヤハーネスを不要にすることができる。
【0030】
また、モータ駆動に必要な回路基板16は、モータ配線部50とモータ駆動制御部52とを配設するものを1つ製作すればよいので、モータ配線部50を配設する回路基板と、モータ駆動制御部52を配設する回路基板とを別々に製作する必要がある制御モータよりも、制御モータの製作における回路基板の製作工程を減らすことができる。
【0031】
また、図3及び図4に示すように、X方向に対してステータ12を投影した回路基板16上に結線部56を配置することにより、結線部56へ電気的に接続される巻線22の端部22Aの長さを短くすることができる。
【0032】
また、図5、6に示すように、モータ配線部50の内側の領域を、モータ駆動制御部52を配設する領域として有効利用することができ、また、モータ駆動制御部52をモータ配線部50の内側に配置することによって、モータ駆動制御部52をモータ配線部50の外側に配置するよりも、回路基板16を小型化することができる。
【0033】
また、図4に示すように、切替手段としてのインバータ装置60をモータ駆動制御部52に配設することにより、インバータ装置60からモータ配線部50までの電気的経路を短くすることができる。
【0034】
なお、本実施形態では、インナーロータ型のブラシレスモータである制御モータ10の例を示したが、回路基板を有するさまざまな制御モータに本発明を適用することができる。例えば、アウターロータ型のブラシレスモータに本発明を適用してもよいし、さまざまな用途のモータに本発明を適用してもよい。
【0035】
また、本実施形態では、モータ駆動制御部52をモータ配線部52の内側に配置した例を示したが、モータ駆動制御部52は、回路基板16においてモータ配線部50が配置されていない部分に配置されていればよい。例えば、アウターロータ型のブラシレスモータにおいて、モータ配線部を環状や円状に配置した場合には、モータ駆動制御部をモータ配線部の外側に配置してもよい。
【0036】
以上、本実施形態について説明したが、本発明はこうした実施形態に何等限定されるものでなく、本発明の要旨を逸脱しない範囲において、種々なる態様で実施し得ることは勿論である。
【符号の説明】
【0037】
10・・・制御モータ、12・・・ステータ(固定子)、14・・・ロータ(回転子)、16・・・回路基板、20・・・コア、22・・・巻線、22A・・・巻線の端部、50・・・モータ配線部(配線部)、52・・・モータ駆動制御部(駆動制御部)、56・・・結線部、60・・・インバータ装置(切替手段)
【技術分野】
【0001】
本発明は、固定子巻線へ給電する回路基板を備えた制御モータに関する。
【背景技術】
【0002】
特許文献1には、プリント基板に配設された配線パターンから固定子鉄心に設けられた巻線へ給電がなされる内転型モータが開示されている。このような制御モータにおいては、巻線の配置に対応させて円環状に配線パターンが配設されているので、プリント基板における配線パターンの内側(プリント基板中心部)が無駄な領域になり、回路基板としての歩留まりが低くなってしまう。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2001−314056号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明は係る事実を考慮し、回路基板の歩留まりを向上させることができる制御モータを提供することを課題とする。
【課題を解決するための手段】
【0005】
請求項1に記載の発明は、巻線が巻回されたコアを備えた固定子と、前記固定子に径方向に対向して配置され、軸線回りに回転可能に支持された回転子と、前記巻線の端部が電気的に接続された配線部と前記配線部と電気的に接続されてモータの駆動を制御する駆動制御部とを併有する回路基板と、を有する制御モータである。
【0006】
請求項1に記載の発明では、1つの回路基板が配線部と駆動制御部とを併有することにより、両者が別々に設けられている場合に比べて回路基板の歩留まりを向上させることができる。また、駆動制御部と配線部とを同一の回路基板に併設することにより、駆動制御部から配線部までの電気的経路を短くすることができる。
【0007】
請求項2に記載の発明は、前記巻線の端部が前記配線部に電気的に接続される結線部は、前記固定子の軸方向に対して前記固定子を投影した前記回路基板上に配置されている。
【0008】
請求項2に記載の発明では、固定子の軸方向に対して固定子を投影した回路基板上に結線部を配置することにより、結線部へ電気的に接続される巻線の端部の長さを短くすることができる。
【0009】
請求項3に記載の発明は、前記配線部は前記回路基板の外周部に環状に配置されていると共に、前記駆動制御部は前記配線部の内側に配置されている。
【0010】
請求項3に記載の発明では、配線部の内側の領域を、駆動制御部を配設する領域として有効利用することにより、回路基板の歩留まりを向上させることができる。また、駆動制御部を配線部の内側に配置することによって、駆動制御部を配線部の外側に配置するよりも、回路基板を小型化することができる。
【0011】
請求項4に記載の発明は、前記駆動制御部には、前記巻線に供給する電流の向きを切替える切替手段が配設されている。
【0012】
請求項4に記載の発明では、駆動制御部に切替手段を配設することにより、切替手段から配線部までの電気的経路を短くすることができる。
【図面の簡単な説明】
【0013】
【図1】本発明の実施形態に係る制御モータを示す斜視図である。
【図2】本発明の実施形態に係る制御モータを示す側断面図である。
【図3】本発明の実施形態に係る制御モータの一部を分解した状況を示す斜視図である。
【図4】本発明の実施形態に係る回路基板を示す正面図である。
【図5】本発明の実施形態に係る回路基板の表面を示す説明図である。
【図6】本発明の実施形態に係る回路基板の裏面を示す説明図である。
【発明を実施するための形態】
【0014】
図を参照しながら、本発明の実施形態について説明する。
【0015】
図1の斜視図には、制御モータ10が示されている。制御モータ10は、自動車に備えられたオイルポンプ駆動用のブラシレスモータであり、図2の側断面図に示すように、固定子としてのステータ12、回転子としてのロータ14、及び回路基板16を有している。
【0016】
図2及び図3の分解斜視図に示すように、ステータ12は、円筒状のケース18内に収容されており、積層鉄心からなる円環状のコア20と、三相交流の電流が流れるU、V、W相の巻線22とによって構成されている。
【0017】
コア20は、ティース部24を円環状に複数配置することにより形成されており、ティース部24の内壁面によって貫通孔26が形成されている。
【0018】
ティース部24には、インシュレータを介して巻線22が巻回されており、図3に示すように、巻線22の端部22Aは、ステータ12の軸方向(以下、「方向X」とする)と略平行となるように回路基板16へ向かって略直線状に導出されている。
【0019】
図2に示すように、ロータ14は、シャフト28と、シャフト28の末端部に固定された円盤状の積層鉄心30とから構成されている。ロータ14は、シャフト28がステータ12の軸線と一致するように配置されている。積層鉄心30の外縁部近くには、X方向へ積層鉄心30を貫通する収容穴32が、積層鉄心30の周方向に対して等間隔に複数(例えば、4つ)形成されており、この収容穴32に永久磁石からなるロータマグネット34が収容され、接着剤等により収容穴32に固定されている。
【0020】
ロータ14は、ステータ12の貫通孔26の内側に配置されており、ロータ14(ステータ12)の半径方向に対して、ステータ12と対向している。また、ロータ14は、フレーム36に設けられた軸受け38と、ケース18に設けられた軸受け40とにシャフト28を回転支持することにより、ステータ12の軸を回転中心にして回転可能に配置されている。
【0021】
図2及び図3に示すように、フレーム36と逆側に位置するケース18の端部には、略環状に形成された樹脂製のホルダ42が配置されており、このホルダ42に形成された凹部66に回路基板16が固定されて保持されている。また、回路基板16を覆うようにして、冷却フィン68を備えた箱状のカバー46がパッド44を介して取り付けられており、図1に示すように、ボルト等の接合部材48により、フレーム36、ケース18、ホルダ42、及びカバー46が一体化されている。
【0022】
図4に示すように、回路基板16には、配線部としてのモータ配線部50と、駆動制御部としてのモータ駆動制御部52とを備えている。モータ配線部50は、回路基板16の外周部付近に円環状に配置されており、モータ駆動制御部52は、モータ配線部52の内側に並んで併設されている。すなわち、回路基板16は、モータ配線部50とモータ駆動制御部52とを併有し、モータ駆動制御部52は、回路基板16におけるモータ配線部50が配置されていない部分に配置されている。
【0023】
回路基板16の表面を描いた図5、及び回路基板16の裏面を描いた図6に示すように、モータ配線部50は、回路基板16に形成された配線パターン54を有しており、配線パターン54上に形成された結線部56には、巻線22の端部22A先端が電気的に接続されている。結線部56は、制御モータ10を組み上げた図2の状態において、X方向に対してステータ12を投影した回路基板16上の位置に配置されている。
【0024】
巻線22の端部22Aは(図3を参照のこと)、制御モータ10を組み上げた図2の状態において、X方向へホルダ42を貫通し、巻線22の端部22Aの先端が結線部56(図3、4を参照のこと)に電気的に接合されている。巻線22の端部22Aは、X方向に回路基板16へ向かってホルダ42を略直線状に貫通し、その状態で(巻線22の端部22Aが曲げられることなく)巻線22の端部22Aの先端が結線部56に電気的に接合されている。
【0025】
図4〜図6に示すように、モータ駆動制御部52は、回路基板16に形成され配線パターン54と電気的に接続されている配線パターン58、切替手段としてのインバータ装置60、モータ駆動制御装置62を有しており、インバータ装置60は、FET(電界効果トランジスタ)からなる6つのスイッチング素子64によって構成され、巻線22に供給する電流の向きを切替える。
【0026】
モータ駆動制御部52には、制御モータ10の外部からの電源線及び信号線(不図示)が電気的に接続されている。これによって、モータ駆動制御部52は、この信号線から送られてきた制御信号に応じて、モータ駆動制御部52と電気的に接続されたモータ配線部50を介して巻線22へ給電し、制御モータ10の駆動を制御する。
【0027】
次に、本実施形態の作用及び効果について説明する。
【0028】
本実施形態の制御モータ10では、図4に示すように、1つの回路基板16にモータ配線部50とモータ駆動制御部52とを一体的に備えて、1つの回路基板16がモータ配線部50とモータ駆動制御部52とを併有することにより、回路基板16における無駄な(モータ駆動に寄与しない)領域を減らし、又は無くすことができるので、モータ配線部50とモータ駆動制御部52とが別々に設けられている場合に比べて、回路基板16の製造における歩留まりを向上させることができる。また、モータ駆動制御部52とモータ配線部50とを並べて併設することにより、モータ駆動制御部52からモータ配線部50(結線部56)までの電気的経路を短くすることができる。
【0029】
また、モータ駆動制御部52を回路基板16に組み込むことによって、制御モータ10の外部にモータ駆動制御部52を設ける必要がなくなる。これによって、モータ駆動制御部52とモータ配線部50とを電気的につなぐモータ駆動電力供給用のワイヤハーネスを不要にすることができる。
【0030】
また、モータ駆動に必要な回路基板16は、モータ配線部50とモータ駆動制御部52とを配設するものを1つ製作すればよいので、モータ配線部50を配設する回路基板と、モータ駆動制御部52を配設する回路基板とを別々に製作する必要がある制御モータよりも、制御モータの製作における回路基板の製作工程を減らすことができる。
【0031】
また、図3及び図4に示すように、X方向に対してステータ12を投影した回路基板16上に結線部56を配置することにより、結線部56へ電気的に接続される巻線22の端部22Aの長さを短くすることができる。
【0032】
また、図5、6に示すように、モータ配線部50の内側の領域を、モータ駆動制御部52を配設する領域として有効利用することができ、また、モータ駆動制御部52をモータ配線部50の内側に配置することによって、モータ駆動制御部52をモータ配線部50の外側に配置するよりも、回路基板16を小型化することができる。
【0033】
また、図4に示すように、切替手段としてのインバータ装置60をモータ駆動制御部52に配設することにより、インバータ装置60からモータ配線部50までの電気的経路を短くすることができる。
【0034】
なお、本実施形態では、インナーロータ型のブラシレスモータである制御モータ10の例を示したが、回路基板を有するさまざまな制御モータに本発明を適用することができる。例えば、アウターロータ型のブラシレスモータに本発明を適用してもよいし、さまざまな用途のモータに本発明を適用してもよい。
【0035】
また、本実施形態では、モータ駆動制御部52をモータ配線部52の内側に配置した例を示したが、モータ駆動制御部52は、回路基板16においてモータ配線部50が配置されていない部分に配置されていればよい。例えば、アウターロータ型のブラシレスモータにおいて、モータ配線部を環状や円状に配置した場合には、モータ駆動制御部をモータ配線部の外側に配置してもよい。
【0036】
以上、本実施形態について説明したが、本発明はこうした実施形態に何等限定されるものでなく、本発明の要旨を逸脱しない範囲において、種々なる態様で実施し得ることは勿論である。
【符号の説明】
【0037】
10・・・制御モータ、12・・・ステータ(固定子)、14・・・ロータ(回転子)、16・・・回路基板、20・・・コア、22・・・巻線、22A・・・巻線の端部、50・・・モータ配線部(配線部)、52・・・モータ駆動制御部(駆動制御部)、56・・・結線部、60・・・インバータ装置(切替手段)
【特許請求の範囲】
【請求項1】
巻線が巻回されたコアを備えた固定子と、
前記固定子に径方向に対向して配置され、軸線回りに回転可能に支持された回転子と、
前記巻線の端部が電気的に接続された配線部と前記配線部と電気的に接続されてモータの駆動を制御する駆動制御部とを併有する回路基板と、
を有する制御モータ。
【請求項2】
前記巻線の端部が前記配線部に電気的に接続される結線部は、前記固定子の軸方向に対して前記固定子を投影した前記回路基板上に配置されている請求項1に記載の制御モータ。
【請求項3】
前記配線部は前記回路基板の外周部に環状に配置されていると共に、前記駆動制御部は前記配線部の内側に配置されている請求項1又は2に記載の制御モータ。
【請求項4】
前記駆動制御部には、前記巻線に供給する電流の向きを切替える切替手段が配設されている請求項1〜3の何れか1項に記載の制御モータ。
【請求項1】
巻線が巻回されたコアを備えた固定子と、
前記固定子に径方向に対向して配置され、軸線回りに回転可能に支持された回転子と、
前記巻線の端部が電気的に接続された配線部と前記配線部と電気的に接続されてモータの駆動を制御する駆動制御部とを併有する回路基板と、
を有する制御モータ。
【請求項2】
前記巻線の端部が前記配線部に電気的に接続される結線部は、前記固定子の軸方向に対して前記固定子を投影した前記回路基板上に配置されている請求項1に記載の制御モータ。
【請求項3】
前記配線部は前記回路基板の外周部に環状に配置されていると共に、前記駆動制御部は前記配線部の内側に配置されている請求項1又は2に記載の制御モータ。
【請求項4】
前記駆動制御部には、前記巻線に供給する電流の向きを切替える切替手段が配設されている請求項1〜3の何れか1項に記載の制御モータ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−110895(P2013−110895A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2011−255423(P2011−255423)
【出願日】平成23年11月22日(2011.11.22)
【出願人】(000101352)アスモ株式会社 (1,622)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成23年11月22日(2011.11.22)
【出願人】(000101352)アスモ株式会社 (1,622)
【Fターム(参考)】
[ Back to top ]