
制御可能な減衰と伝播速度とを有する波形を伝送する方法
【課題】波形を伝送する方法を提供する。
【解決手段】制御可能な減衰と伝播速度とを有する波形を伝送する装置と方法とを説明する。例示的な方法は指数波形を生成することを含み、この指数波形は、(a)次の式

で表され、ただし、Dは大きさ、Vinは電圧、tは時間、ASDは減衰係数、vSDは伝播速度であり、(b)最大値で切り欠かれる。例示的な機器は、指数波形発生器と、指数波形発生器の出力に結合する入力記録器と、指数波形発生器の出力に結合するテスト対象の伝送路と、テスト対象の伝送路に結合する出力記録器と、テスト対象の伝送路に結合する別の伝送路と、別の伝送路と接地とに結合する終端インピーダンスとを備える。
【解決手段】制御可能な減衰と伝播速度とを有する波形を伝送する装置と方法とを説明する。例示的な方法は指数波形を生成することを含み、この指数波形は、(a)次の式
で表され、ただし、Dは大きさ、Vinは電圧、tは時間、ASDは減衰係数、vSDは伝播速度であり、(b)最大値で切り欠かれる。例示的な機器は、指数波形発生器と、指数波形発生器の出力に結合する入力記録器と、指数波形発生器の出力に結合するテスト対象の伝送路と、テスト対象の伝送路に結合する出力記録器と、テスト対象の伝送路に結合する別の伝送路と、別の伝送路と接地とに結合する終端インピーダンスとを備える。
【発明の詳細な説明】
【技術分野】
【0001】
(関連出願の相互参照)
本出願は同時継続出願米国第09/519,922号、2000年3月7日出願の一部継続出願であり、また前記から35U.S.C119(e)および/または35U.S.C.120に従う優先権を請求するものであって、その全内容を全ての目的に対してここに援用する。
【0002】
本発明は一般に信号伝送の分野に関するものである。特に、本発明の代表的な実施の形態は伝送路のテストと通信とに関するものである。
【背景技術】
【0003】
伝送路は信号の特性的な損失と固有の時間遅れとを有するので、遅れと歪とを受ける複数の信号を用いるシステムを設計するときに問題を生じる。伝送路に入力を与えるのに用いられる一般的な信号は、容易に決定できない遅れ、すなわち伝播時間を示す。かかる波の伝播速度も伝送路の場所と共に変化する。
【0004】
時間領域反射率計(Time Domain Reflectometer;TDR)は、伝送路内の欠陥を見つけて、伝送路の長さや伝送路の特性を示す他のパラメータ(単位長さ当りのインダクタンス、単位長さ当りの静電容量、単位長さ当りの抵抗、および単位長さ当りのコンダクタンスなど)を実験的に推定するのに用いられるテスト器である。
【0005】
TDRテスト技術における重要な測定値はテスト器が生成して伝送路に与えるテスト・パルスの飛行時間(TOF;time-of-flight)である。飛行時間は、伝送路に沿う2地点で検出されたパルスの通過時間で測定されてもよい。パルスの伝播速度の値と共に、飛行時間の測定値により、測定点の間の距離や、反射波の場合はパルス発射点からインピーダンスが変化してパルスを反射して戻る位置までの距離を得ることができる。
【発明の概要】
【発明が解決しようとする課題】
【0006】
TDR技術の基本的な限界は、損失があって分散的な伝送路でのTOF測定の精度が低いことである。短距離で、低損失で、低分散の伝送路でTOF値が比較的高いTDR精度で得られる唯一の理由は、伝播するテスト・パルスの形状と振幅とがTOF測定中に進む距離にわたって変わらずに保たれるからである。対照的に、分散的で損失のある長い伝送路では、この技術で用いられるテスト・パルスの形状と幅と速度とは進行中に変化する。
【0007】
また、損失があって周波数に依存する伝送媒体で高速通信を行うことは困難である。かかる伝送路でデータ伝送速度を高める方法が望ましい。
これまでのところ、飛行時間を正確に測定し、伝送路の長さや、損失があって分散的な伝送路の特性を示す他のパラメータを推定し、かかる伝送媒体を介して高速通信を可能にする方法および/または装置を提供するという要求はまだ満たされていない。必要なのは、かかる要求に対処する解決策である。
【課題を解決するための手段】
【0008】
以下の実施の形態に関するニーズがある。もちろん、本発明はこれらの実施の形態に制限されるものではない。
本発明の或る態様では、本質的に一定の伝播速度を有する波形を伝送路に沿って伝送する方法は或る指数波形を生成することを含む。この指数波形は(a)次の式
で表され、ただし、Dは大きさ、Vinは電圧、tは時間、ASDは減衰係数、vSDは伝播速度であり、(b)最大値で切り欠か(truncate)れる。本発明の別の態様では、減衰係数と伝播速度とを決定する機器は、指数波形発生器と、指数波形発生器の出力に結合する入力記録器と、指数波形発生器の出力に結合するテスト対象の伝送路と、テスト対象の伝送路に結合する出力記録器と、テスト対象の伝送路に結合する別の伝送路と、別の伝送路と接地とに結合する終端インピーダンスとを備える。
本発明のかかる実施の形態は、以下の説明と添付の図面とを参照すればよく認識し理解することができる。しかし、以下の説明は本発明の種々の実施の形態とその多くの特定の詳細とを示すものであるが、説明のためのものであって制限するものではないことを理解すべきである。本発明の精神から逸れることなくその範囲内で多くの代替、変更、追加、および/または再調整を行うことが可能であり、本発明は全てのかかる代替、変更、追加、および/または再調整を含むものである。
【図面の簡単な説明】
【0009】
本発明のいくつかの態様を示すために、この明細書の一部を形成する図面を添付する。本発明と、本発明で与えられるシステムの構成要素および動作との明確な概念は、図面に示す例示的な、したがって制限しない実施の形態を参照すれば明らかになる。同じ参照番号(2つ以上の図面に示される場合)は、同じまたは同様の要素を指す。本発明は、これらの図面の1つ以上とそこに示されている説明とを参照すればより良く理解することができる。図面に示されている諸機能は必ずしも寸法どおりに描かれてはいないことに注意していただきたい。
【図1A】本発明の或る実施の形態を表す、(x=0,t)についてのSD波形のグラフである。
【図1B】本発明の或る実施の形態を表す、移動するフレーム内のx’=l(x=l,t’)でのSD波形のグラフである。
【図2】本発明の或る実施の形態を表す、SDパラメータを測定するための装置のブロック図である。
【図3】本発明の或る実施の形態を表す、α=3.0×106/sであって、611.2m[2004ft]の伝送路(T1ケーブル)のx=0およびx=305.6m[1002ft]での電圧トレースで、4Vのしきい値で測定した飛行時間を示すグラフである。
【図4A】本発明の或る実施の形態を表す、x=0およびx=d(305.6m[1002ft])での電圧のSDしきい値重なり領域のグラフである。
【図4B】本発明の或る実施の形態を表す、α=3.0×106/sであって、305.6m(1002ft)のT1伝送路の測定された一定のしきい値飛行時間のグラフである。
【図5A】本発明の或る実施の形態を表す、x=0の電圧と、Rt=∞での電圧の1/2についてのSDしきい値重なり領域のグラフである。
【図5B】本発明の或る実施の形態を表す、α=3.0×106/sであって、611.2m[2004ft]のT1伝送路の測定された一定しきい値飛行時間のグラフである。
【図6A】本発明の或る実施の形態を表す、伝達関数を実験的に決定するためにT1ケーブルに与えられる入力パルスのグラフである。
【図6B】本発明の或る実施の形態を表す、T1ケーブルの305.6m[1002ft]で測定されたパルスのグラフである。
【図7A】本発明の或る実施の形態を表す、T1ケーブルに与えられる入力パルスのパワー・スペクトル密度のグラフである。
【図7B】本発明の或る実施の形態を表す、T1ケーブルの305.6m[1002ft]で測定されたパルスのパワー・スペクトル密度のグラフである。
【図8】本発明の或る実施の形態を表す、305.6m[1002ft]のT1ケーブルで実験的に得られた伝達関数のグラフである。
【図9】本発明の或る実施の形態を表す、最初の測定波形と、T1ケーブルの305.6m[1002ft]でのシミュレーション波形と、一定しきい値飛行時間とのグラフである。
【図10】本発明の或る実施の形態を表す、305.6m[1002ft]での電圧トレースの測定値とシミュレーション値との差のグラフである。
【図11】本発明の或る実施の形態を表す、最初のシミュレーション波形と、α=1.0×105/sであって、T1ケーブルの305.6m[1002ft]での波形と、一定しきい値飛行時間とのグラフである。
【図12】本発明の或る実施の形態を表す、最初のシミュレーション波形と、α=1.0×107/sであって、T1ケーブルの305.6m[1002ft]での波形と、一定しきい値飛行時間とのグラフである。
【図13A】本発明の或る実施の形態を表す、実験に基づく伝達関数と共に、シミュレーションにより決定されたSDパラメータVSDのグラフである。
【図13B】本発明の或る実施の形態を表す、実験に基づく伝達関数と共に、シミュレーションにより決定されたSDパラメータASDのグラフである。
【図14】本発明の或る実施の形態を表す、ZSD (α)を決定するための装置のブロック図である。
【図15A】本発明の或る実施の形態を表す、α=1.5×106/sのとき、種々の終端抵抗についてd=305.6m[1002ft]で測定された電圧トレースのグラフである。
【図15B】本発明の或る実施の形態を表す、α=1.5×106/sのとき、既知の終端トレースを持つ出力信号振幅と、開放された終端トレースの出力信号振幅の半分との比のグラフである。
【図16】本発明の或る実施の形態を表す、T1ケーブルの実験的に決定されたSDインピーダンスをαの関数として表すグラフである。
【図17】本発明の或る実施の形態を表す、直列に接続された24AWGより線対を通して、入力点と、〜1,830m[6kft]と、〜3,660m[12kft]と、〜5,490m[18kft]とで測定したSD電圧トレースとSD電圧トレースの自然対数とのグラフである。
【図18】本発明の或る実施の形態を表す、3,660m[12kft]でのフィルタのノイズに対する感度と応答の速度とを示す、SD領域の端を検出するのに用いられるグラフである。
【図19】本発明の或る実施の形態を表す、αにおける真空内の光の速度の割合としての1/√LCの変動のグラフである。
【図20】本発明の或る実施の形態を表す、3,660m[12kft]で測定された波形と共に示す、3,529.8m[11,573ft](上段)と、3,726.8m[12,219ft](中段)と、3,922.0m[12,859ft](下段)とにおける、減衰させて時間シフトした入力波形のグラフである。
【図21】本発明の或る実施の形態を表す、SD領域内の(V(予測)−V(測定))の標準偏差と相関領域内の推定距離とのグラフである。
【図22A】本発明の或る実施の形態を表す、3,725.9m[12,216ft]での(V(予測)−V(測定))と推定距離での(V(予測)−V(測定))の最小分散とのグラフである。
【図22B】本発明の或る実施の形態を表す、3,737.5m[12,254ft]での(V(予測)−V(測定))と推定距離での(V(予測)−V(測定))の分散とのグラフである。
【図23】本発明の或る実施の形態を表す、24AWG BKMA50ケーブルの〜1,830m[6kft]と、〜3,660m[12kft]と、〜5,490m[18kft]とで測定された電圧トレースと、SD予測に従って減衰させて時間シフトした印加波形とのグラフである。
【図24】本発明の或る実施の形態を表す、印加された切欠き(truncated)SDパルスと305.6m[1002ft]で開放された終端から反射された波とを示す、入力で測定された電圧トレースのグラフである。
【図25】本発明の或る実施の形態を表す、305.6m[1002ft]で開放された終端から反射された波と、最も適当に減衰させて順方向に時間シフトして611.2m[2004ft]の推定全距離を進んだ印加波とを示す、入力で測定された電圧トレースのグラフである。
【図26A】本発明の或る実施の形態を表す、305.6m[1002ft]の開いた終端を持つT1伝送路における、x=0での電圧のSD TDRしきい値重なり領域のグラフである。
【図26B】本発明の或る実施の形態を表す、α=6.7×106/sを持つ305.6m[1002ft]のT1伝送路において反射波の全推定進行距離が613.1m[2010ft]である、測定された一定しきい値TDR飛行時間のグラフである。
【図27】本発明の或る実施の形態を表す、印加切欠きSDパルスと305.6m[1002ft]で短絡終端から反射された波とを示す、入力で測定された電圧トレースのグラフである。
【図28】本発明の或る実施の形態を表す、305.6m[1002ft]で短絡終端から反射された波の反転と、最も適当に減衰させて順方向に時間シフトして611.2m[2004ft]の推定全距離を進行した非反転の印加入力波とを示す、入力で測定された電圧トレースのグラフである。
【図29A】本発明の或る実施の形態を表す、305.6m[1002ft]の短絡終端のT1伝送路におけるx=0での電圧のSD TDRしきい値重なり領域のグラフである。
【図29B】本発明の或る実施の形態を表す、α=6.7×106/sであって、305.6m[1002ft]のT1伝送路において612.4m[2008ft]の全推定距離を進行した、測定された一定しきい値TDR飛行時間のグラフである。
【図30】本発明の或る実施の形態を表す、305.6m[1002ft]のT1ケーブル(点線)と値Z0である抵抗器とに与えられた電圧パルスのグラフである。
【図31】本発明の或る実施の形態を表す、305.6m[1002ft]のT1ケーブル(点線)と値Z0である抵抗器とに与えられた電圧パルスの別のグラフである。
【図32】本発明の或る実施の形態を表す、より線対に与えられた波形とZ0に与えられた波形との差の伝達関数のグラフである。
【図33】本発明の或る実施の形態を表す、α=6.7×106/sを持つ印加シミュレーションSD波形と、伝達関数を用いて計算した反射波形とのグラフである。
【図34】本発明の或る実施の形態を表す、305.6m[1002ft]で開いた終端から反射された波と、最も適当に減衰させて順方向に時間シフトして611.2m(2004ft)の推定全距離を進行した印加波とを示す、シミュレートされた電圧トレースのグラフである。
【図35A】本発明の或る実施の形態を表す、305.6m[1002ft]の開放された終端のT1伝送路におけるx=0での電圧のシミュレートされたSD TDRしきい値重なり領域のグラフである。
【図35B】本発明の或る実施の形態を表す、α=6.7×106/sである305.6m[1002ft]のT1伝送路において611.5m[2005ft]の推定全距離を進んだ、シミュレートされた一定しきい値TDR飛行時間のグラフである。
【図36A】本発明の或る実施の形態を表す、611.2m[2004ft]のより線対の伝送路に与えられた補正なしのSD波形のグラフである。
【図36B】本発明の或る実施の形態を表す、611.2m[2004ft]のより線対の伝送路の100Ω終端で測定された補償なしのSD波形のグラフである。
【図37A】本発明の或る実施の形態を表す、611.2m[2004ft]のより線対の伝送路に印加された補正ありのSD波形のグラフである。
【図37B】本発明の或る実施の形態を表す、611.2m[2004ft]のより線対の伝送路の100Ω終端で測定された補償ありのSD波形のグラフである。
【図38】本発明の或る実施の形態を表す、611.2m[2004ft]のより線対の伝送路の入力で測定された一連の4つのシンボルのグラフである。
【図39】本発明の或る実施の形態を表す、611.2m[2004ft]のより線対の伝送路の100Ω終端で測定された一連の4つのシンボルのグラフである。
【図40】本発明の或る実施の形態を表す、線形領域の最小平均二乗当てはめ(fit)を示す、シンボル期間毎に611.2m[2004ft]の100Ω終端で測定された電圧の自然対数グラフである。
【図41】本発明の或る実施の形態を表す、Xi=e(αo+(i−1)・Δα)・tのグラフである。
【図42】本発明の或る実施の形態を表す、直交ベクトル集合Y=[Y1,Y2,Y3,Y4,Y5]のグラフである。
【図43】本発明の或る実施の形態を表す、非直交波形Y’=[Y1,Y2,Y3,Y4,Y5]・sin(πt/7×10-6)のグラフである。
【図44】本発明の或る実施の形態を表す、2,440m[8000ft]での受信機での分散された波形Y’のグラフである。
【図45】本発明の或る実施の形態を表す、入力と2,440m[8000ft]での補正パルスCのグラフである。
【図46】本発明の或る実施の形態を表す、補正パルスZ=Y’+b・Cを持つ入力での成分関数のグラフである。
【図47】本発明の或る実施の形態を表す、2,440m[8kft]での成分関数Zのグラフである。
【図48】本発明の或る実施の形態を表す、伝送されて2,440m[8kft]で直交波形を生成する1次独立波形Sのグラフである。
【図49】本発明の或る実施の形態を表す、2,440m[8kft]で受信された直交波形Sのグラフである。
【図50】本発明の或る実施の形態を表す、直交集合Sの生成アルゴリズムの流れ図である。
【図51】本発明の或る実施の形態を表す、Sの4つの直交パルスのそれぞれに5ビットで符号化された3つの連続伝送シンボルQのグラフである。
【図52】本発明の或る実施の形態を表す、Sの4つの直交パルスのそれぞれに5ビットで符号化された、2,440m[8kft]での受信機の入力での3つの連続伝送シンボルQのグラフである。
【図53】本発明の或る実施の形態を表す、−140dBm AWGNを含んで伝送されたデータの1秒間、すなわち1.67×106ビットの間の信号誤差(a(期待)−a(検出))のヒストグラムのグラフである。
【発明を実施するための形態】
【0010】
本発明とその種々の特徴および利点について、添付の図面に図示し以下の記述に詳細に説明している制限的でない実施の形態を参照して十分に説明する。本発明の詳細を不必要に分かりにくくしないために、周知の開始材料、処理技術、構成要素、および装置の説明は省略する。しかし詳細な説明と特定の例は、本発明の特定の実施の形態を示すものであるが、単なる例示であって制限するものではないことを理解すべきである。本発明の基礎となる精神および/または範囲内の種々の代替、変更、追加、および/または再調整は、この開示から当業者に明らかになる。
【0011】
この出願では、いくつかの文献を括弧内の数字で参照する。かかる文献の完全な引用は、明細書の末尾と特許請求の範囲との間の参照文献の部に示されている。本発明の背景とこの技術の現状を示すために、全てのこれらの文献の開示全体をここに援用する。
【0012】
以下に参照する米国特許出願はその意図する目的を満たした実施の形態を開示している。米国特許出願第09/519,922号、2000年3月7日出願、の全内容を全ての目的でここに援用する。
一般に、本発明の文脈は信号伝送を含んでもよい。本発明の文脈は伝送路パラメータを測定しまた推定するための方法および/または機器を含んでもよい。また本発明の文脈は損失があって分散的な伝送路で高速通信を行うための方法および/または機器を含んでもよい。
【0013】
この技術で価値を有する本発明の実際的な応用は時間領域反射率測定である。また、本発明は損失のある伝送路に関して有用である。また、本発明は周波数に依存する伝送路に関して有用である。この技術で価値を有する本発明の別の実際的な応用は高速通信である。本発明には事実上無数の他の用途がある。実際上、信号の伝送に関する全ての応用に有用である。
本発明の或る実施の形態を表す、制御可能な減衰と伝播速度とを有する波形を伝送する方法は、費用的な有効性が高くて優れている。本発明は従来の方法に比べて質が高く、および/または費用が安い。
【0014】
本発明は、本発明者が高速送出し(SD;Speedy Delivery)波形と名付けた切欠き波形を用いる方法および/または機器を含む。結合された損失のある伝送路内のSD伝播の分析を示し、またSD波形の切欠き(truncate)に関連する実際的な検討を行う。SD波形の伝播を記述するのに用いるパラメータを定義し、その値を決定する方法を示す。かかるパラメータは、高速送出し伝播速度vSD、高速送出し減衰係数ASD、および高速送出しインピーダンスZSDを含む。かかるパラメータは、伝送媒体の特性と指数係数α(SD入力信号パラメータ)とに依存してよい。
【0015】
本発明は結合された伝送路内のSD信号の伝播を説明する。2本の伝送路を含む実施の形態を示す。多数の結合された伝送路を含む一層複雑な構成は、この開示を見れば当業者は容易に開発することができる。また、単一モード通信ファイバ内の切欠きSD信号を含む光パルスの緩やかに変化する包絡線の伝播の挙動を説明する。
【0016】
本発明は、SDテスト・パルスを用いて損失のある伝送路内のSD信号の伝播パラメータASDおよびvSD(周波数に依存するパラメータを含む)の実験的な推定値を得る方法を教示する。或る較正ケーブルの長さについてvSDの値を決定すると、一定しきい値飛行時間測定値を用いて同様のケーブル内の不連続(断絶)点までの距離を測定することができる。較正手続きは、指数係数α毎に実験的に繰返すことができる。
【0017】
本発明は、広帯域の非SD波形を用いて所定の伝送媒体の較正長さについて実験的な伝達関数を作成する方法を与える。この伝達関数を用いて、広範囲の指数係数αの値を持つSD波形の伝送をシミュレートすることができる。SDパラメータASD(α)およびvSD(α)はこれらのシミュレートされた波形から決定することができる。較正プロセスにシミュレーション・ステップを含めることにより、αの種々の値についてASD(α)およびvSD(α)の値を決定するのに必要な実験的な測定を大幅に減らすことができる。これにより、SD波形発生器を必要とせずに媒体のSDの性質をシミュレーションにより決定することができる。
【0018】
本発明は伝送路のSDインピーダンスを決定する方法を教示する。また、ZSDの予測可能な変動をαの関数として示す。この予測可能性を用いると、設計者はパラメータαを適当に選択することにより伝送路のSDインピーダンスを制御することができる。
また本発明は、損失が大きくて長い伝送路において、切欠きSDテスト・パルスを用いた別の精密な距離測定法を説明する。テスト・パルスがかかる伝送路を進むと減衰が大きくなるため、その振幅が小さすぎて、普通のようにしきい値と交差する飛行時間の測定ができないことがある。本発明は減衰を予測してこの困難を克服し、長い損失のある伝送路の正確な長さ測定値を得る方法を含む。
【0019】
本発明はインピーダンス不連続点までの距離を正確に決定するのにSDテスト波形が有用であることを示す。正確な時間領域反射率測定(TDR)装置の基礎としてSD波伝播を用いる方法の例を示す。この装置は、SD波形発生器、伝送媒体と結合する手段、印加波形と反射波形とを測定する手段、ディスプレイ、記憶装置、およびSD波形を分析し解釈する計算機能を含んでよい。本発明はコンピュータも含んでよい。本発明は精度を高めるために現在利用可能なTDR装置を変更する方法を含んでよい。この変更はTDRソフトウエアの変更であって、装置製作コストを再び必要としないものであってよい。標準のTDR波形を用いてテスト対象となる伝送路の実験的伝達関数を決定してよく、次にこの伝達関数を用いてSD波形の伝播をシミュレートしてよい。このプロセスにより、既存の計算アルゴリズムを変更するだけで全てのSDの利点を現在利用可能な装置に組み込んで、仮想SD TDR装置を作ることができる。
【0020】
切欠きSDテスト・パルス方式はソナーおよび地球物理学応用における音波の伝播にも適用することができる。反射音信号を用いて水面下の物体の位置を正確に決定し、また地球物理的層境界の位置を決定することができる。実験的伝達関数を決定し、これを用いてSDパルス伝播をシミュレートするので、複雑な音パルスを物理的に生成する必要がなくなる。
本発明は損失があって周波数に依存する伝送媒体内でデータ伝送方式を強化するのに適した複数の伝播特性を有するSD波形を与える。
【0021】
本発明は、αの値を変えてデータを切欠きSD波形上に符号化することにより、パルス当たりに伝送されるビット数を増やす方法を与える。ここに示す例は、610m[2kft]のケーブルで連続的に伝送される、4つの異なるαを持つSDパルスを用いる。かかるSDパルスは、指数定数に歪を与えずにケーブルの端で受信される。4つのパルスは正または負の信号として伝送されるので8つの可能な状態を作る。したがって、各パルスは各シンボル期間内で3ビットの伝送情報を表す。この方式は、短距離で低損失の伝送路で用いることができる。
【0022】
また本発明は、受信機で直交する切欠きSD波形の1次結合から成るパルスの集合を生成するのにSD伝播特性を用いる方法を教示する。その振幅を変えることによりデータをこれらのパルスに符号化して、これらの振幅変調パルスを伝送路で同時に伝送することができる。その直交性を利用して、個別のパルスの振幅を受信機で計算する。この方法はノイズに対して強いので、長くて損失の大きな伝送路で用いることができる。
また本発明はディジタル回路、特にオンチップ・クロック回路にSD波形を用いることを教示する。切欠きSDクロック波形を用いてクロック・スキュー(clock skew)を減らす方法を提供する。
【0023】
伝送路内の高速送出し(SD)波形の伝播は、次の式
で記述することができる。伝送路の入力での関連する境界条件はV(x=0,t)=Deαtである。ただし、ASDはSD信号の減衰を或る固定の時刻で伝送路に沿う距離の関数として記述する指数係数であり、vSDはSD信号伝播速度である。これらの量の関係は簡単な式ASD(α)・vSD(α)=αで表される。伝播する波のパラメータASDおよびvSDと伝送路境界条件とは全てαの関数であり、伝送路について実験的に決定してよい。
【0024】
2本の平衡なより線対の伝送路の場合は、差電圧を2本の線に等しく分割して、この対の各線の電流を、大きさは等しいが方向は逆にすることができる。この場合は、電信方程式を次のように書くことができる。
この分析はネット・クロス静電容量Cijとネット・クロス・インダクタンスMijとを含む。クロス抵抗とクロス・コンダクタンスの項は無視する。次にこれらの式をラプラス変換により複素周波数領域に変換する。
【0025】
上側の式をxについて偏微分し、
項について下側の式を代入すると、
すなわち、
が得られる。この式のシステムは次の解を有する。
【0026】
半無限の伝送路の対についての境界条件、x=0でのV(x=0,s)と、
とを与えると
が得られる。
は複素対称マトリクスなので、
と書くことができる。ただし、
は
積の固有マトリクスであり、
は
の対角固有マトリクスである。したがって、
と書くことができる。これから、
が得られる。
【0027】
x=0で与えた境界条件がSD波形
の場合は、SD解は
である。ただし、P(αi)は実マトリクスである。
【0028】
P-1をQで表すと次のように書くことができる。
すなわち、
すなわち、
【0029】
固有ベクトル・マトリクスP、その逆である、P-1=Q、およびSDパラメータDに関連する実定数は次のように書くことができる。
A11=D1P11(α1)Q11(α1)
A12=D1P12(α1)Q21(α1)
A21=D2P11(α2)Q12(α2)
A22=D2P12(α2)Q22(α2)
B11=D1P21(α1)Q11(α1)
B12=D1P22(α1)Q21(α1)
B21=D2P21(α2)Q12(α2)
B22=D2P22(α2)Q22(α2)
【0030】
伝送路の信号は次式で表される。
すなわち、
ただし、
したがって、各αで評価された積
の各固有値γiに関連するSD減衰と速度とがわかる。
【0031】
正の指数波形は増加し続けるので、実際的に考えると、特定の応用により決まる或るレベルで波形を切り欠く、すなわち制限する必要がある。切欠きはこの技術で周知のいくつかの方法で行ってよい。
伝送媒体の入力をこのように切り欠くと、伝播する指数(SD)信号も媒体内を進むに従って大きさが制限され、損失のある媒体では、この最大振幅は進む距離と共に減少して減衰の性質を示す。
伝播する(SD)信号は座標フレーム(x,t)で次のように記述される。
ただし、ASD(α)vSD(α)=αである。
【0032】
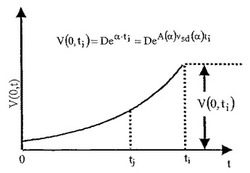
図1Aは(x=0,t)のSD波形のグラフで、t=tiで限界に達するx=0での切欠き入力波形を示す。
4パラメータ(LCRG)伝送路の場合は、次式が得られる。
進行するSD波の減衰を、速度
で進む移動基準フレームの視点から考えてもよい。
【0033】
新しい座標系、
を導入すると、
すなわち、
【0034】
伝送媒体内を距離x=x’=lだけ進んだ後の進行波を見ると、
t’=tiとすると、x=lでの切欠きSD波形の最大値が得られ、任意の値0≦tj≦tiについて移動基準フレームのx=lでの関係する点tjでの信号の値は、
である。
【0035】
図1Bは、移動するフレームのx’=l(x=l,t’)でのSD波形のグラフを示す。この切欠き波形の減衰は次の比で定義される。
そのラプラス変換が
である周波数に依存するパラメータを有する伝送路内を進む切欠きSD波形の点tjでの信号のこの減衰は、
ただし、
【0036】
また、周波数に依存するパラメータを有するこの伝送媒体内で、指数振幅切欠き限度に達したときに入力指数パルスを急速に閉じると、伝送されるパルスのリーディング・エッジの指数領域の終端の振幅は更に減少して、波長分散により波形が崩れる。
結合された伝送路は同じ方法で扱うことができる。2つの結合された伝送路の一方のSD伝播を支配する式は次の通りである。
【0037】
とx’=xとを代入すると次式が得られる。
これを書き直すと、
【0038】
別の例は単一モード通信ファイバ内の光パルスの緩やかに変化する包絡線E(x,t)の展開を含む。シュレージンガの偏微分方程式[3]
はファイバ内で波長分散によって伝播するパルス包絡線の形の展開を記述する。色分散が起こる理由は、モード伝播定数β(ω)が角周波数ωの非線形関数だからである。ただし、
であり、ω0はファイバ内で変調される光の周波数である。
ω0/β0はパルスの位相速度である。1/β1は群速度、β2はファイバ内で伝播するときにパルスを広げる群速度分散(GVD;Group Velocity Dispersion)パラメータ、β3は3次分散(TOD;Three-order Dispersion)パラメータ[4]である。
【0039】
ωに関するβの高次の微分は無視する。しかしこの技術の当業者はこの分析でこれを追加してよい。ファイバ減衰はパラメータγで表される。
損失を有する、すなわち、
の1次シュレージンガ方程式のSD解は
【0040】
x=0でのファイバへの入力での境界条件は
である(α=1/T0の場合の図1Aを参照)。光ファイバ通信網内の受信機の検出器は伝播するパルス包絡線の大きさの自乗
に応答する。この場合は、
ただし、包絡線の切欠きSDリーディング・エッジの伝播速度は
である。ただし、vsd(T0)・A(T0)=1/T0であることに注意する。
【0041】
群速度1/β1で進む移動基準フレームに変換するには、
t’=t−β1x
x’=x
この移動基準フレーム内のSD伝播速度は
パルス包絡線のリーディング・エッジの切欠きSD部分の減衰は、
この結果は、T0を十分小さくすることができれば、この減衰を小さくすることができることを意味する。この分析では含めなかったが、β(ω)の高次の項はT0が小さくなるとかなり影響が大きくなる。
【0042】
例
本発明の特定の実施の形態について、いくつかの詳細な特徴を示す以下の制限しない例により更に説明する。以下の例は本発明を実施する方法の理解を助けるために述べるものである。認識されるように、以下の例は本発明を実施するときに十分機能することを確認した実施の形態を表し、本発明の実施において好ましいモードを持つものと考える。しかし認識されるように、開示される例示的な実施の形態に多くの変更を行っても、本発明の精神と範囲から逸れることなく同様のまたは同じ結果を得ることができる。したがって、各例は本発明の範囲を制限すると考えてはならない。
【0043】
例1
SD波形パラメータASDおよびvSDを決定する方法
この例は、損失があって分散的な伝送路内のSD波形の伝播を記述する伝送路パラメータASDおよびvSD(周波数に依存するパラメータを含む)の実験的推定値を、SDテスト・パルスを用いて得る方法を教示する。ASDおよびvSDの数値はαの関数として実験的に決定することができる。
図2は、銅のより線対伝送路のこれらのパラメータを決定するのに用いてよい実験装置を示す。伝送路のテスト長さdと、与えられたSD入力信号のαの値とを測定する。テスト対象の伝送路と同じ長さの追加の伝送路を図のように取り付けて開放回路で終端する。この例のケーブルは、T1ケーブルの305.6m[1002ft]コイルの2本の24AWG、個別シールドのより線対である。
【0044】
DとαとSD信号の継続時間との値を、テスト伝送路内を伝播するSD信号の最初の飛行時間中に測定点dで反射が起こるのを防ぐように選んだ。また伝送路の追加の長さにより、伝播するSD波形のdでの測定が完全に終わるまでテスト伝送路内で起こる全ての反射を遅らせることができる。
伝播するSD波形が一定電圧しきい値と交差するタイミングで、SD信号の飛行時間を直接測定することができる(図3)。伝送路内のSD信号伝播速度の値vSDは、TOF=(tf−t0)=vSDdの関係を用いて計算することができる。図4Aに再び示すこれらの波形の飛行時間を1.2ボルトから4.8ボルトまでのしきい値について図4Bにプロットした。図4.3bに示すしきい値重なり領域の平均TOFは1,716nsである。このTOFから、
vSD=d/TOFAVG=305.6m[1002ft]/1,716×10-9s=1.781m×108m/s[5.839×108ft/s]。
【0045】
SD減衰係数ASDは、ASD・vSD=αの関係を用いてαとvSDとから計算することができる。図4.3aに示す波形から得られる計算されたASDは
ASD=α/vSD=(3.0×106/s)/(1.781×108m/s)[5.839×108ft/s]=16.845×10-3/m[5.138×10-3/ft]。
ケーブルの較正された長さについてこの速度が分かると、この型のしきい値を交差するTOF測定値を用いて同じ伝送路の別のサンプルの未知の長さを決定することができる。
【0046】
図5Aを参照すると、直列に接続されたT1伝送路内の2つのより線対について測定された入力電圧が示されており(図2参照)、T1伝送路内の開放された終端の第2のより線対(図2で
の場合)の端で測定された電圧の半分を示す。図5Bに示すしきい値重なり領域の平均TOFは3,418nsである。この飛行時間と前に較正したvSDとから得られた推定距離は608.8m[1,996ft]で、これは実際の長さ611.2m[2004ft]の99.6%である。
【0047】
図5Aは、切欠きSDパルスの減衰のために、より長い伝送路で起こり得る問題も示す。SDしきい値重なり領域はパルスが伝播するに従って小さくなり、距離が更に長くなると減衰する。この測定の精度は改善することができるし、非常に長い伝送路でしきい値重なり領域が減少することにより起こる問題は例4で説明するTOF測定方法を用いて克服することができる。
【0048】
この方法の精度が高い理由は、信号しきい値振幅の或る範囲にわたって得たTOF測定値の平均を用いるためである。これらの値の平均を用いればTOFの測定の精度を向上させることが可能である。なぜなら、波形のリーディングSDエッジ上の全ての点は同じ速度で進むからである。これは、現在の時間領域反射率測定技術が分散するテスト・パルスの発生時刻を測定しようとするのとは対照的である。これは、パルスの傾斜もほぼゼロのときに、ゼロしきい値レベルにおけるパルスのしきい値と交差する時刻を正確に測定しようとするのと同じである。
【0049】
例2
実験的伝達関数からSDパラメータを抽出する
例1で述べた方法は、指数係数α毎に実験的に繰り返す必要があるという点で限界がある。これはケーブルの種類毎に実験室で長い較正時間を必要とする。較正のプロセスにシミュレーションを含めれば、ASDおよびvSDの値を決定するのに必要な実験的測定を大幅に減らすことができる。このプロセスでシミュレーションを用いるには、特定の種類のケーブルの応答を記述する伝達関数が必要である。T1ケーブルについて分析されるαは1×105/sから107/sの範囲である。αのこの範囲は16kHzから1.6MHzの周波数帯域に対応するので、伝達関数はこの範囲で正確でなければならない。ケーブルの伝達関数はメーカから得てもよいし、既知のパルスを与えて、与えられたケーブル入力波形とケーブルに沿う或る既知の(較正)距離での応答波形とを測定することにより、実験的に決定してもよい。伝達関数は入力パルスと出力パルスとの高速フーリエ変換(FFT)の比、すなわち、
Hest(jω)=FFT(V(lでの測定値))/FFT(V(与えられた値))
から計算する。伝達関数が決定されると、αの一連の異なる値を有するSD波形の伝播をシミュレートして、飛行時間とSDパラメータASDおよびvSDを決定することができる。
【0050】
この方法を、例1で用いたT1ケーブルについて示すことができる。全長611.2m[2004ft]の端を100オーム抵抗器(図4.1のRt)で終端させて、305.6m[1002ft]の測定点での反射を最小にした。図6AはT1に与えた測定入力パルスを示す。図6Bは305.6m[1002ft]で測定した出力パルスを示す。図7A,7Bは測定パルスのパワー・スペクトル密度を示す。正確な伝達関数を実験的に推定するのに十分のエネルギーが対象の周波数帯域内にあることを示すためにαの範囲を示す。測定信号から決定された伝達関数の大きさと位相とを図8に示す。
【0051】
伝達関数が分かると、対象とする表示された範囲内で任意のαを有する波形をシミュレートして、ASDおよびvSDの値を決定することができる。セクション3の測定されたSD波形のASDおよびvSDの値はαが3×106/sにおける伝達関数のテストを与える。図9は、セクション2で測定した入力信号を用いて決定した飛行時間のプロットと、実験的伝達関数を用いたシミュレーションにより予測した305.6m[1002ft]での波形とを示す。シミュレーションTOFの1,714nsという結果(図9)は実験的に測定した(図5B)TOFが1,716nsとほとんど同じである。図10は、305.6m[1002ft]で測定した波形と305.6m[1002ft]でシミュレートした波形(図9の上側)との差を示す。SD伝播領域の間では、この差は±20mV程度である。
【0052】
最初のSD波形をシミュレートし、伝達関数を用いて305.6m[1002ft]での波形を予測することにより、αの範囲で、このプロセスが行われる。全ての場合に、シミュレートした最初の波形を1μsの傾斜で閉じてその高周波成分を減らした。図11,12は、αの端点1×105/sおよび1×107/sについてのシミュレートした入力および305.6m[1002ft]での曲線と、それぞれの一定しきい値飛行時間曲線とを示す。αの範囲に対してシミュレーションからのvSDおよびASDの値を図13A,13Bに示し、また以下の表Iに示す(括弧内の*印の値は、例1の方法を用いて、実際のT1伝送路に沿って測定された入力および出力SD信号で得られたものである)。
【表1】
【0053】
例3
SD伝送路インピーダンスの測定
SD伝送路インピーダンスZSD(α)は、対象とするαについて決定される実数である。周波数に依存する伝送路パラメータのラプラス変換
が分かっている場合は、ZSD(α)は次式から計算することができる。
【0054】
SD伝送路インピーダンスZSD(α)は、テスト伝送路について種々の既知の終端インピーダンスにかかる電圧波形のSD部分を測定してこの測定値からZSD(α)の値を計算することにより、実験的に決定することもできる。終端で測定したSD波形VSD(Rt)は、入力SD波形V+SDと反射SD波との和から成る。反射波はSD反射係数Γと入力波との積である。終端で測定したSD信号は
VSD(Rt)=(1+Γt)・V+SD=2Rt・V+SD/(Rt+ZSD)
である。SD信号の全ての集中および分散インピーダンス値は実数値である。
【0055】
伝送路の測定値からZSDを決定するのに用いられる実験装置を図14に示す。305.6m[1002ft]のT1伝送路の電圧の入力および終端の測定波形を図15Aに示す。これらの測定は、αが1.5×106/s、終端抵抗が49.5オーム、98.6オーム、および開放された回路で行った。反射のない波形(入力波形V+SD)の大きさは、開放された終端
で測定した信号を2で割って決定する。既知の終端波形と入力波形との比VSD(Rt)/V+SDを用いると、終端抵抗毎の反射係数Γtの直接測定値Γt=(VSD(Rt)/V+SD)−1が得られる。図15Bはこのケーブルとαについての測定比を示す。伝送係数の関係、1+Γt=2Rt/(Rt+ZSD)を用いると、ZSD=Rt(1−Γt)/(1+Γt)が得られる。
【0056】
Rtの2つの有限値98.6Ωと49.5Ωとを用いると、このT1ケーブルのZSDの2つの推定値が得られる。
このプロセスを5×105/sから10×106/sのαについて繰返した結果を図16に示す。
【0057】
例4
長い伝送路長若しくは反射波を用いるインピーダンス変化に対する距離の精密測定
この例は、高い損失を有する長い伝送路において、テスト・パルスの減衰が非常に大きくて、伝送路を進むとその振幅が余り小さくなるので普通のしきい値横断測定を行うことができない場合の、SDテスト・パルスの別の精密TOF測定法を記述する。
【0058】
波形が減衰すると、一定電圧しきい値で測定した飛行時間を推定することが困難になる。これは、約1,830m[6kft]、24AWG、50対のより線対の電話ケーブルに沿う電圧トレースを調べると分かる(図17参照)。50対の中の3対を直列に接続して、3つの等しい長さの部分を持つ約5,490m[18kft]のケーブルを生成した。与えられたSD入力波形はDeαt、ただし、Dは0.19ボルト、αは3.5×105/sである。このαは610m[2kft]のT1ケーブルに用いたαの約10分の1である。セクション2で説明したように、かかる長い距離にわたって伝播パルスの切欠きSDリーディング・エッジの減衰を小さくするには、αを小さくする必要がある。これにより、長い距離にわたって信号を検出することができる。このケーブルのASDおよびvSDとαとの値は例1の手続きを用いて決定した。これらの測定値は、電話ケーブル内のより対長さ毎に1,830m[6000ft]の較正長を前提としたことに基づく。その結果は、vSD=1.326×108m/s[4.348×108ft/s]とASD=27.144×10-4/m[8.279×10-4/ft]である。
【0059】
信号は1,830m[6kft]より遠い距離でも検出可能であったが、一定しきい値飛行時間は測定できなかった。図17は、入力と、〜1,830m[6kft]と、〜3,660m[12kft]と、〜5,490m[18kft]との距離で測定した電圧トレースを示し、また大幅に減衰した伝播波形のSD領域の形状が維持されることを示す。5,490m[18kft]のトレースは、測定波形を2で割ることにより開放された終端からの反射に対して訂正されている。最後の2つのトレースは、この小さなαでも3,660m[12,000ft]を超えると0.19ボルトより大きなSD信号がほとんどないことを示す。これは入力SD波形パラメータDの値であり、入力SD波形とこれらより長距離でのSD波形とに共通するSD電圧しきい値はほとんど存在しない。
【0060】
大幅に減衰したSDパルスの飛行時間を正確に測定する第1のステップは、ケーブルに沿う距離lで測定し記録した伝播するパルスV(t)のSD領域を検出することである。このためは、測定パルス波形の比
を計算する。パルスのSD領域では、この比はαである。次に、この比がαから発散する時刻を検出することによりSD領域の端を見つける。また比
を用いてSD領域の端を検出することもできる。SD領域では、この比はやはりαである。後者の2次導関数と1次導関数との比は、応答は早いが、1次導関数と信号との比に比べてノイズに影響されやすい。3,660m[12kft]で測定したSD波形について、これらの比を時間の関数として図18にプロットした。一般に任意の正のnについての比
はこの性質を有する。
【0061】
更に、信号とその積分との比を用いてSD領域の位置を定めることができる。SD領域では次の関係がある。
したがって、時間が経つに従ってこの比はαに収束する。この比はSD領域の端で発散する。一定の伝送路パラメータを有する損失のある伝送媒体では、推定SD領域の端は媒体内の光の速度を決定するための良いマーカである。パルスの切欠きSDリーディング・エッジは、周波数に依存するパラメータを持っていても分散しない。しかし閉じたパルスの高周波成分は分散する。かかる高速の高周波成分は、パルスが伝播するに従って切欠きSD領域の端を侵食する傾向がある。長距離では、かかる高周波成分も大幅に減衰するので、SD領域の侵食の量は進んだ距離に比例しない。この場合は、SD領域の検出された端はパルスの飛行時間、すなわち波が進んだ距離の最初の推定値として使えて、次のステップでより正確な飛行時間測定値を調べる領域を定義するのに役立つ。
【0062】
距離dを伝播した切欠きSD信号の減衰は
で示された。かかる伝送路に時間領域反射率測定(TDR)を適用するとき、パラメータ
を一般にVpで表し、真空中の光の速度の分数として与えられる。この空気コア・ポリ24AWGケーブルではTDRで用いられるVpの標準値は0.67である。しかし、この分析で用いた比の値は0.59である。この理由を図19に示す。0.67という値はかかる電話線をテストするのに用いる標準TDRパルス内に見られる高周波では適当であるが、かかる長距離伝送路内の低い切欠きSD信号減衰についてここで選択したαは低周波と同等であって、より低い速度で伝播する。
【0063】
伝播するパルスのリーディング・エッジにおけるSD領域の端の最初のTOF推定値が距離lで得られると、進行する波のSD領域の端が最初のSD波形の切欠き点に対応すると仮定して入力波形を減衰させて時間シフトする(図20の上段)。次に、進行するそれぞれの新たな推定進行距離に基づいて入力波形が漸増的に時間シフトされて減衰される。距離を推定する度に、このシフトして減衰させた入力波形が測定波形から差し引かれる。直流電圧オフセットもノイズもない場合は、推定距離が実際の距離に等しいときSD領域内でのこの差はゼロである。なぜなら、ノイズは常にあるし、ケーブルに沿って種々の点で差分直流オフセットはしばしば変化するので、各推定距離でこの差の変動が評価される。入力波形を実際の進行距離までシフト(平行移動)したときこの相関は最小になる(図20の中段)。
【0064】
伝送路の間に直流差分オフセットがある場合は、この最小値はゼロでない。この推定距離では、閉じるパルスからの分散による切欠きSD領域の端の侵食は明らかである。波形を余り大きくシフトするとこの偏差誤差測定値は大きくなる(図20の下段)。図21は、シフトさせて減衰させた入力波形と第2および第3のより線対の間の接続点で測定したSD波形との差の標準偏差を、推定距離の関数として計算したものを示す。最小値は推定距離3,725.9m[12,216ft]で生じる。図22Aは2つの波形の差と最小値での波形の差の分散とを示す。図22Aは、2つの測定点の間に5から10ミリボルトの差分直流オフセットがあることを示す。図22Bは、推定距離が最小点に関連する距離より11.6m[38ft]長いときに分散が増加したことを示すために提示した。
【0065】
このプロセスを、減衰入力波形から測定波形への最適当てはめシフト位置を知るために平均距離1,864.5m[6,113ft]と、3,725.8m[12,216ft]と、5,589.7m[18,327ft]とを用いて8回繰り返した。3つの長さの標準偏差はそれぞれ0.31m[1ft]、0.31m[1ft],1.53m[5ft]であった。これらのデータ集合の1つに関連する当てはめを図23に示す。ケーブルの実際の長さは正確には分からなかったが、ケーブル内の各対は平行であり、長さの差は小さく、より率が異なるのがその原因である。このプロセスから、2つの長さの距離は1つの長さの距離の2倍の3.05m[10ft]以内である。3つの長さの距離は1つの長さの距離の3倍の3.36m[11ft]以内である。1,830m[6kft]の距離を標準として用いると、不一致は3,660m[12kft]の長さでは−0.08%、5,490m[18kft]の長さでは−0.06%である。
【0066】
例5
時間領域反射率計(TDR):反射波を用いるインピーダンス変化に対する伝送路距離の精密測定
時間領域反射率計(TDR)は伝送路内の欠陥を見つけ、伝送路の長さや伝送路の特有の他のパラメータ(単位長さ当たりのインダクタンス、単位長さ当たりの静電容量、単位長さ当たりの抵抗、単位長さ当たりのコンダクタンスなど)を実験的に推定するのに用いるテスト器である。TDRテスト技術における基本的な測定値は、テスト器が生成して伝送路に与えるテスト・パルスの飛行時間(TOF)である。この飛行時間は伝送路に沿う2地点で検出されたパルスの通過時間を測ることにより測定してよく、時間領域伝送測定値(TDT)と呼ばれている。また時間領域反射測定の場合は、1地点でのパルスの発射時刻と、パルスが伝送路に沿う或る距離で欠陥または他のインピーダンス変化から反射された後で同じ地点まで戻るパルスの復帰時刻とを推定する。かかるTOFの測定値とパルスの伝播速度の値とで、測定点の間の距離を得ることができる。また反射波の場合は、パルス発射点から、インピーダンスが変化したためにパルスが反射されて発射点に戻る位置までの、距離を得ることができる。
【0067】
TDR技術の基本的な限界は、損失があって分散的な伝送路でのかかるTOFの測定値の精度が低いことである。短距離で、低損失で、低分散の伝送路で得られるTOF値のTDR精度が比較的高い理由は、伝播するテスト・パルスがTOFの測定中に進んだ距離にわたってその形状と振幅が変わらずに保たれるからである。対照的に、分散的で損失のある長い伝送路では、この技術で用いられるテスト・パルスは進むに従って形状や振幅や速度が変わる。かかる環境下でこの技術で用いられるTOF測定の重点は、テスト・パルスのリーディング・プロフィールの出現時刻を推定することである。この技術で用いられるテスト・パルスのシグネチャのこの部分は信号レベルが低くまた信号傾斜が小さいことが特徴で、パルス出現時刻を正確に測定することは困難である。
【0068】
そのリーディング・エッジに切欠きSD信号を含むテスト・パルスを用いることにより、TDR技術は損失があって分散的な伝送路でいくつかの利点を有する。この切欠きSDリーディング・エッジは形状を変えずにかかる伝送路を或る一定速度で進む。このSDエッジの伝播速度は伝送路パラメータとSD信号パラメータαとの関数で、αを変えることにより制御することができる。テスト・パルスの切欠きSDリーディング・エッジは損失のある伝送路を進むに従って減衰するが、この減衰率も伝送路パラメータとSD信号パラメータαとの関数であって、αを変えることにより制御することができる。
【0069】
TDRの場合と同じ原理を伝送路内の電磁波以外の波形に適用することができる。SONARまたは地球物理学的な応用では、このセクションで説明した方法を用いて音波の反射を分析して、正確な飛行時間と距離の推定値を与え、また伝送媒体の特徴を定めるのに用いることができる。
例1と例2とに説明したように、TDR応用に於けるSDテスト波形の精度はT1ケーブルを用いた例により示すことができる。T1ケーブル内の2つのより線対を直列に接続して611.2m[2004ft]のケーブルを形成し、切欠きSD信号を入力に与える。電圧トレースを305.6m[1002ft]での2つの伝送路の接続点で測定する。これにより、測定点で伝送路インピーダンスの不一致があっても訂正する必要がなくなる。与えられた波の指数係数αは6.7×106/sである。SDパラメータASDおよびvSDは例2に示した実験的伝達関数分析から得られる。表Iのデータから内挿することにより、このαについてASDは35.092×10-3/m[10.703×10-3/ft]、vSDは1.914×108m/s[6.276×108ft/s]という値が得られる。
【0070】
最初の例ではケーブルを開放された回路で終端させる。開放された回路の反射係数は+1で、これは正の反射になる。図24は305.6m[1002ft]の点で測定した電圧波形を示し、順方向に進む印加波と、ケーブルの端で開放された終端から反射された波とを示す。図25は、測定された反射波と、例4の手続きに従って時間シフトさせて減衰させた印加波との結果を示す。このプロセスでは、反射波の全進行距離の測定値は611.2m[2004ft]、より正確にはこのより線対セクションの長さ305.6m[1002ft]の2倍である。図26A、26Bは例1で説明したTOFの一定しきい値タイミング法の結果を示す。この方法によると飛行時間は3,203nsで、これから推定される全進行距離は613.1m[2,010ft]である。これから得られる推定されるより線対セクションの長さは306.5m[1005ft]で、誤差は0.9m[3ft](+0.3%)である。これは、パルスが遠くまで進んでかなり減衰したきは、一定しきい値TOF測定を用いると精度が下がることを示す。テスト・パルスがより大きく減衰するとこの方法の精度は更に下がる。ディジタル回路では、このレベルの減衰は一般には起こらない。相互接続でのディジタル信号の最大減衰は一般に駆動信号の半分より小さい。かかる場合は、SD波による一定しきい値TOF測定の方が、反射パルスの推定出現時刻を用いる現在のTDR法より正確なはずである。
【0071】
次の例では第2のより線対は短絡で終端する。短絡での反射係数は−1で、これは負の反射になる。図27は305.6m[1002ft]で測定した電圧波形を示し、順方向に進む印加波と、第2のより線対の端で短絡終端から反射された波とを示す。図28は、反転した反射波と、例4の手続きに従って時間シフトして減衰させた印加波との結果を示す。このプロセスでは、全進行距離の測定値は611.2m[2004ft]、正確にはより線対の長さ305.6m[1002ft]の2倍である。図29A、29Bは例1で説明したTOFを推定する一定しきい値タイミング法を示す。この方法によると飛行時間は3,200nsであり、これから推定される全進行距離は612.4m[2008ft]である。これから推定されるより線対セクションの長さは306.2m[1004ft]で、誤差は0.6m[2ft](+0.2%)である。
【0072】
TDRプロセスへのSD波形の有用性は、例2で説明したプロセスと同様にして伝送路に与えた非SDパルスを用いて得られる実験的伝達関数を用いることにより大きくなる。このケーブルを用いる例として、T1ケーブルの単一の終端のないより線対に接続する任意の関数発生器で、実験的な電圧パルスを生成する。この波形を図30,31(破線)に示す。信号発生器から同じ波形を305.6m[1002ft]のより線対ではなく可変抵抗負荷に与えてもよい。抵抗器を調整して、その波形が任意の波形発生器からより線対に与えられる波形の形状および大きさに近似させる。図30,31(実線)参照。波形は正確には一致しない。なぜなら、抵抗器の周波数応答はより線対の応答と全く同じではないからである。負荷抵抗がより線対の特性インピーダンスZ0に等しい場合は、波形はケーブルに与えられた波形とよく一致して同様の周波数成分を有する。抵抗負荷で測定した信号と伝送路で測定した信号との違いは、与えられた信号に対する伝送路の応答から成り、伝送路のインピーダンス不一致点から反射された全ての波を含む。伝達関数は2つの信号の差と抵抗器だけの信号の高速フーリエ変換(FFT)の比、すなわち
Hest(jω)=FFT(V(ケーブルで測定した値)−V(負荷抵抗Z0で
測定した値))/FFT(V(負荷抵抗Z0で測定した値))
から計算する。図32に示すこの関数を用いて、SDパルスに対する反射伝送路応答を評価することができる。
【0073】
このプロセスのテストとして、前の2つの実験に用いたαに等しいαを有するSDパルスをシミュレートした。開放された終端のT1ケーブルについて決定された伝達関数(図32)を用いて期待応答を計算した(図33参照)。抵抗器とケーブルとが異なる高周波インピーダンス値を有するために、パルスを与えたときに小さなパルスが存在する。このパルスの影響は適当な時間窓で除いた。次に、シミュレートされた応答を用いて例4(図34)と例1(図35A、35B)の方法により開放された終端までの距離を推定した。スライドおよび減衰法の結果から得られたパルスの全往復距離の推定値は611.2m[2004ft]、すなわち開放された終端までの正確な距離305.6m[1002ft]の2倍であった。一定しきい値法から得られた推定進行距離611.8m[2006ft]、すなわち開放された終端までの推定距離305.9m[1003ft]の2倍(0.1%の誤差)、での飛行時間は3,196nsであった。
【0074】
実験では、これらの結果を得るのに実際のSD信号をより線対に与えたわけではない。伝送路に与えたテスト信号(図30)は、最大1,525m[5kft]までの範囲の長さの通信ケーブルをテストするための市販のTDR測定器から得られたタイプと同じであった。このテスト伝送路電圧から得た測定値を用いて実験的な伝送路伝達関数を得た。SD TOFと伝送路距離の推定値とは全て、非SD信号を用いて推定したこの実験的伝送路伝達関数を用いて伝送路に沿うSD伝播をシミュレートして、計算で得た。
【0075】
例6
高速送出し波形を用いた高速データ伝送による通信
SD波形は、データ伝送方式の基礎として適したいくつかの特性を有する。例えば、指数形状は均一なケーブル内を一定速度で伝播する間保持される。SD波形の減衰は指数波形パラメータαを変えることにより調整することができる。SD波形の伝播速度は指数波形パラメータαを変えることにより調整することができる。また、異なるαを持つSD波形は1次独立である。
【0076】
この例は、SD波形を用いてデータを伝送する方法の基礎として第1の特性を用いることを教示する。信号は、直列に接続された305.6m[1002ft]のT1ケーブル内の2つのより線対から成る伝送路に沿って611.2m[2004ft]伝送する。第2のより線対は100Ωの抵抗器で終端させる。データはそれぞれ別のαを有する4つのSD波形に符号化される。各波形は正または負のDで伝送することができるので、シンボル当たり3ビットで全部で8つの状態が得られる。1つのシンボルは3μs毎に送信されるので、データ・レートは1Mbpsである。当業者がこの開示の利点を認識するように、ここに含まれる教示からいくつかの他の通信方式を容易に導くことができる。
【0077】
シンボルは、2μsの切欠きSDリーディング・エッジ期間と、これに続く1μsの回復期間とで構成してもよい。この回復期間は、伝送路がゼロ電圧に戻るのに必要な時間を短縮するよう調整された可変幅の正弦半波補正パルスを含む。この回復期間と補正パルスの必要性を図36A、36B、37A、37Bに示す。図36Aは補正パルスを含まない伝送パルスを示し、図36Bは補正パルスを含まない受信パルスを示す。入力パルスのリーディング・エッジでの切欠きSD波形は簡単な傾斜信号で閉じられ、これは伝送路応答により波形が崩れる。伝播するパルスのSD部は変形しないが、傾斜の端部は3μsのシンボル期間を超えた領域に離れる。図37A、37Bはこのシンボル間の干渉を除くための補正パルスの影響を示す。各切欠きSD波形は異なる量の補正を必要とするので、第2のより線対の終端でのパルスを観察して、これに基づいて正弦半波パルスの幅を変えてもよい。
【0078】
図38はより線対入力に与えられる一連の4つのシンボルを示す。各シンボルは特有のαと特有のDとを有する。αは、2.2×106/s、3.3×106/s、4.4×106/s、5.5×106/sで、等間隔1.1×106/sだけ離れている。図9.3でこの4つの連続したシンボルに用いられているαの順序は4.4×106/s、2.2×106/s、3.3×106/s、5.5×106/sである。Dは、最大および最小のシンボル電圧をほぼ等しく維持できるように選択した。この例では、第4の波形は反転されている。611.2m[2004ft]の距離にある100Ωの終端で測定した信号を図39に示す。図40は図39の信号の各シンボル期間内の信号の自然対数を示す。整合フィルタの集合を用いれば個別のαを検出することができる。これらの波形の1次領域の最小自乗1次当てはめ(least square linear fit)の傾斜を下の表IIに示す。この例の決定レベルはαのステップ・サイズ1.1×106/sの半分の0.55×106/sである。全ての誤差はこのしきい値よりはるかに下である。
【表2】
【0079】
例7
高速送出し波形の直交1次結合を用いた高速データ伝送による通信
この例は、異なるαを有する持つSD波形が1次独立であるという第4のSD波形特性を用いることを示す。この特性はパルスの直交集合を生成するのに用いることができる。データは、パルスの振幅を変えることによりこれらのパルス上で符号化することができる。これらの振幅変調直交パルスを伝送路で同時に伝送する。受信機では、その直交性を利用して各パルスの振幅を計算する。この方式が機能するためには、SD波から得られる基本パルスが受信機で直交しなければならない。
【0080】
データを繰り返し伝送するには閉じたパルスを必要とする。例6に示すように、閉じた伝送パルスのリーディング・エッジのSD部はその形状を保持するが、パルスを閉じるのに用いた形状は伝播するに従って分散する。パルスの切欠きSDリーディング領域の減衰と伝播速度とはSDパラメータαの関数である。したがって、種々のα値を有するこれらのパルスの集合の直交性はパルスが進むに従って悪くなる。幸い、パルスは受信機だけで直交すればよい。1次独立の成分パルスから直交パルスの集合を生成するには種々の方法を用いることができる。かかる成分パルスに対する伝送路の影響は実験的に決めることができる。受信機で測定されるかかる伝送成分波形は1次独立である。かかる測定された1次独立の成分パルスの1次結合を用いて、受信機で直交するパルスの集合を生成する。直交化プロセスにより決定される定数を送信機に与え、これを用いて、受信機で直交する伝送パルスを生成する。この手続きの例を以下に示す。直交パルスを生成して伝送するプロセスを100Ωの抵抗で終端させる2,440m[8kft]の26AWGより線対の伝送路についてシミュレートする。
【0081】
例示的な直交化プロセスはSD波形の集合
を用いることから始まる。ただし、m=1...5、α0=1×104/s、Δα=1×105/s、t=0...7×10-6sである。7μs間隔の5つの波形を図41に示す。各波形はこの時間間隔で1次独立である。また、これらのSD波形は多項式構造を有する。すなわち、各波形は前の波形をe(Δα)t倍したものに等しい。これにより、多項式の簡単な再帰的アルゴリズム[4]を用いて、これらの1次独立波形の直交1次結合を作ることができる。この手続きから得られる5つの正規直交Yの集合を図42に示す。この場合、XとYとの関係は次の通りである。
集合Yは正規直交であって、内積は、
である。
【0082】
0および7μsでの鋭い波形遷移は高周波成分を有し、これは伝送中に分散してシンボル間の干渉を起こす。この影響はこの直交集合にsin(ωt)を掛けることにより減らすことができる。ただし、ω=π/7×10-6である。これはSD波形をX’に変える影響を有する。ただし、m=1...5について、
である。
SD波形X’はやはり1次独立であるが、これらの波形の前の1次結合
はもう直交しない。波形Y’を図43に示す。これらの波形はチャンネルを通して受信機に伝送してよい。
【0083】
受信機では、12μsシンボル期間を超えると波形は分散のトレーリング(trailing)の影響を示す(図44参照)。次のシンボル期間内へのパルスの広がりを除くことができないと、受信機でのこのシンボル間の干渉のために、送信機で符号化されたデータを読むことができなくなる。この干渉を除く簡単な方法は、テール(tail)を補正するZ=Y’+b・Cを有するパルスを追加することである。この例では、補償パルスC(t)はシンボル期間の開始の後1μs遅れた1サイクル、1−cos(πt/2.9×10-6)である(図45参照)。図46、47は、適当な大きさの補正パルスを各信号に加えた入力での波形と2,440m[8kft]での波形とを示す。受信機でのかかる補正成分パルスの継続時間はここでは望ましい12μsのシンボル期間より短い(図47参照)ので、かかるパルスの任意の1次結合は次のシンボルと干渉しない。
【0084】
正弦パルスを掛け、補正パルスを加え、チャンネルで伝送することは、全て最初の5つのパルスの直交性を悪くした。最初、図42のパルス間の角度は全て90°であった。現在は、図47のパルス間の角度は11°から74°の範囲である。ここでこれらの5つの1次独立の波形を結合して、主成分分解(PCD;principle component decomposition)[5]を用いて4つの直交波形の集合Sにする。グラム・シュミット(G−S)直交化法[6]を手続きのこのステップに用いてもよいが、PCD法の方が好ましい。G−S法は直交ベクトル集合を一度に1ベクトルずつ拡張する。成分が1次独立に近い場合は、これは条件の悪い変換マトリクスになる。PCD法が好ましい理由は、全ての成分により広がる全内積空間を考慮に入れるからである。このプロセスは全内積空間(entire inner-product space)の固有ベクトルを用いて変換マトリクスを生成する。また、変換マトリクスは固有値を順序づけるのに処理しやすい。この例では、変換マトリクスを切り欠くことにより4つの最大固有値を選択した。このプロセスにより変換マトリクス
を生じる。これは、5つの成分信号を1次結合することにより2,440m[8kft]で直交する4つの波形を生成する。これらの波形を図48(送信信号)と図49(受信直交信号)に示す。
【0085】
正規直交集合Sは受信機で直交し正規化される。このプロセスは、チャンネルの影響を示し、定義された成分の1次結合として送信機入力波形を伝送する前に容易に構築することができる。この集合Sを、直交パルス振幅変調のデータ伝送方式の基本機能として用いることができる。このプロセスを図50に示す。
4つの正規直交パルスSのそれぞれを5ビットで振幅変調することにより、データを符号化することができる。5ビットは32の状態を必要とする。各状態は各直交パルスSiの1つの振幅レベルaiに対応する。この例では、振幅レベルは±0.5、±1.5、...、±15.5であった。これらの4つの変調直交パルスを合計して、シンボルQ=a1S1+a2S2+a3S3+a4S4を生成する。
【0086】
シンボルを伝送し、受信機でパルスの直交性を用いて復号する。例えば、直交パルス1に与えられた信号は、シンボルQとパルス1信号S1との内積をとることにより見つけることができる。これを行うには、受信シンボルに既知の直交パルスを掛け、シンボル期間にわたって積分し、その結果を正規化する。
【0087】
図51は送信機の出力での3つの連続シンボルを示し、図52は受信機の入力での同じ3つのシンボルを示す。シンボルは、
4(パルス/シンボル)×5(ビット/パルス)/
(12×10-6s/シンボル)=1.67Mbps
のデータ・レートで、直交パルス当たり5ビットをランダムに選択して符号化した。
図53は、−140dBmの加法性白色ガウス・ノイズ(Additive White Gaussian Noise、AWGN)を含んで伝送された1秒当たりのデータ、すなわち1.67×106ビットで検出されたレベル内の誤差(a(期待)−a(検出))のヒストグラムである[7]。誤差分布の標準偏差は0.016と、0.018と、0.020と、0.018とで、最大検出誤差は0.074と,0.071と,0.083と、0.078とである。復号振幅決定レベルは±0.5である。
【0088】
例8
オンチップ・クロック回路
この例はディジタル回路内、特にオンチップ・クロック回路内でSD波形を用いることを教示する。オンチップ・クロック回路は高いクロック・レートを持つ伝送路と同様に作動する。
SD波形をクロック信号として用いたときの主な設計上の利点は、RC伝送路の遅れ
が、一般に用いられているステップ信号の場合のように長さについて2次ではなく、長さlについて1次であることである。RLC伝送路内のSD信号の場合も、長さについて1次遅れ
である。対照的に、従来の信号により励起されたRLC伝送路内の遅れは長さと共に指数的に増大する遅れを示す[8]。
【0089】
全てのタイプのクロック線についてSD信号遅れが長さの1次関数として増加するので、クロック線のレイアウトの設計プロセスが簡単になる。RC伝送路のように作動する損失の大きなクロック線から、RLC伝送路のように作動する損失の小さなクロック線まで、クロック線の作動の全範囲においてこの1次関係は保たれる。伝送路の長さとSDクロック信号の遅れとの間のこの簡単な1次関係は、精度を高めて設計計算要求を減らすソフトウエアCADツールを実現する基礎を与える。
【0090】
時間スキュー・クロック制御はシステム性能を制限する主要な問題である。この問題に対する解は、クロック信号を必要とするチップ上の種々の地点までの導体の長さを等しくすることを含む。信号経路の長さを等しくして信号遅れを等しくするために、いくつかの幾何学的パターンが一般に用いられる(Hなど)。これには、物理的にマスタ・チップ・クロック・ドライバの近くにあるピンの位置にクロック信号を送るトレースに沿う経路の長さと、マスタ・ドライバから最も長い距離にあるピンの位置までのクロック信号経路の長さとを等しくする必要がある。遅れを等しくするための小さな調整は、伝送路の幅を調整して伝送路パラメータを変更することにより単位長さ当たりの遅れを変更するか、またはクロック線内に組み込まれた遅れ固定ループの遅れを変えるなどの能動手段を用いることにより行われる。
【0091】
本発明は、切欠きSDクロック波形を用いてクロック・スキューを減らす方法および/または機器を提供する。本発明の利点は、単位長さ当たりの遅れを、クロック線ドライバの設計で選択された指数係数αで調整できることである。この単位長さ当たりの制御可能な遅れは、最初の特許出願[9]で30.6m[100ft]の同軸ケーブルについてされている。測定された最小同軸ケーブル遅れは1.8倍に増えた。
【0092】
指数係数αを変えて単位長さ当たりのクロック信号遅れを大幅に増やすことにより、クロック・ドライバの近くのピンまでの線を短くしてドライバとピンとの間の最小の物理的距離に一層近づけることができるし、また1つの経路の遅れをチップ上の最も長いクロック線の遅れに等しく保つことができる。クロック分配線が短くなるとチップ上で用いる物理的空間が小さくなり、全クロック線の静電容量が小さくなる。クロック線の静電容量がこのように小さくなると、所定のクロック周波数でチップが必要とする全電力消費が少なくなる。1つの実施の形態では、クロック発生器内で指数係数αを調整する機構を含めることにより、調整可能な遅れを持つSDクロック信号をSD波形ドライバが生成できるようにすることもできる。SDクロック信号の遅れをこのように調整することができるので、現在の技術で用いられている遅れ固定ループより遅れの調整範囲が大きくなる。
【0093】
本発明は伝達媒体を含んでもよい。本発明は時間領域反射率計のための方法および/または機器を含んでもよい。また、本発明は伝送路による高速通信のための方法および/または機器を含んでもよい。また、本発明は集積回路内の高速クロック信号のための方法および/または機器を含んでもよい。
【0094】
ここで用いる「或る」という用語は1つ以上と定義する。ここで用いる「複数」という用語は2つ以上と定義する。ここで用いる「別の」という用語は少なくとも2番目以上と定義する。ここで用いる「含む」および/または「有する」という用語は構成する(すなわち、オープンランゲージ)と定義する。ここで用いる「結合された」という用語は、必ずしも直接にではなくまた必ずしも機械的にではなく接続されたと定義する。ここで用いる「約」という用語は、少なくとも所定の値に近い(例えば、好ましくは10%以内、より好ましくは1%以内、最も好ましくは0.1%以内)と定義する。ここで用いる「実質的に」という用語は、少なくとも所定の状態に近い(例えば、好ましくは10%以内、より好ましくは1%以内、最も好ましくは0.1%以内)と定義する。ここで用いる「手段」という用語は、或る結果を達成するためのハードウエア、ファームウエアおよび/またはソフトウエアと定義する。ここで用いる「プログラム」または「コンピュータ・プログラム」という用語はコンピュータ・システム上で実行するよう設計された一連の命令と定義する。プログラムまたはコンピュータ・プログラムは、サブルーチン、関数、手続き、オブジェクト方法、オブジェクト実現、実行可能なアプリケーション、アプレット、サーブレット、ソース・コード、オブジェクト・コード、シェアド・ライブラリ/ダイナミック・ロード・ライブラリおよび/またはコンピュータ・システム上で実行するよう設計された命令の他のシーケンスを含んでよい。
【0095】
ここに開示された本発明の全ての実施の形態は、この開示を参照して過度の実験を行わずに実施して用いることができる。本発明はここに述べた理論的な概念に制限されるものではない。本発明者が考えた本発明を実行する最良のモードを開示したが、本発明の実施はこれに限られるものではない。したがって当業者が認識するように、本発明はここに特に述べたもの以外で実施してよい。
また、ここに述べた方法を構成するステップまたはステップのシーケンスに変更を行ってもよい。
【0096】
「のための手段」および/または「のためのステップ」という表現により所定のクレームに制限が明示されていない限り、クレームは手段と機能の制限を含むものではない。本発明の一般的な実施の形態は独立クレームおよびその同等クレームに示されている。本発明の特定の実施の形態は従属クレームおよびその同等クレームにより区別されている。
【0097】
参考文献
[1] A. J. Gruodis, C. S. Chang、「結合された損失のある伝送の特性表示とシミュレーション(Coupled Lossy Transmission Characterization and Simulation)」IBM J. Res. Develop. 25, 1981, pp. 25-41。
[2] E. G. Sauter、非線形光学(Nonlinear Optics), New York: John Wiley & Sons Inc., 1996, p. 127。
[3] G. P. Agrawal、非線形ファイバ・オプティックス(Nonlinear Fiber Optics), San Diego: Academic Press, 3rd ed., 2001, p. 127。
[4] Dunham Jackson、フーリエ級数および直交多項式(Fourier Series and Orthogonal Polynomials), Menasha: George Banta Company, Inc., 1957, pp. 156-157。
[5] Attila Szabo, Neil S. Ostlund、現代量子化学(Modern Quantum Chemistry)、Mineola: Dover Publications Inc., 1989, pp. 142-145。
[6] John G. Proakis、ディジタル通信(Digital Communications), Boston: WCB McGraw-Hill, 3rd ed., 1995, pp. 167-173。
[7] TI.417-2001、米国標準規格:ループ伝達システムのスペクトル管理、付録B:ループ情報(American National Standard-Spectrum Management for Loop Transmission Systems, Annex B: Loop Information), p.84。
[8] A. Deutsch et. al.「損失のある伝送路での高速信号伝播(High-Speed Signal Propagation on Lossy Transmission Lines), IBM J. Res. Develop. Vol. 34, No. 4, July 1990, p. 605。
[9] Robert H. Flake、制御可能な減衰および伝播速度を有する波形を伝送する方法(Methods For Transmitting a Waveform Having a Controllable Attenuation and Propagation Velocity), 米国特許出願SN 09/519,922号。
【技術分野】
【0001】
(関連出願の相互参照)
本出願は同時継続出願米国第09/519,922号、2000年3月7日出願の一部継続出願であり、また前記から35U.S.C119(e)および/または35U.S.C.120に従う優先権を請求するものであって、その全内容を全ての目的に対してここに援用する。
【0002】
本発明は一般に信号伝送の分野に関するものである。特に、本発明の代表的な実施の形態は伝送路のテストと通信とに関するものである。
【背景技術】
【0003】
伝送路は信号の特性的な損失と固有の時間遅れとを有するので、遅れと歪とを受ける複数の信号を用いるシステムを設計するときに問題を生じる。伝送路に入力を与えるのに用いられる一般的な信号は、容易に決定できない遅れ、すなわち伝播時間を示す。かかる波の伝播速度も伝送路の場所と共に変化する。
【0004】
時間領域反射率計(Time Domain Reflectometer;TDR)は、伝送路内の欠陥を見つけて、伝送路の長さや伝送路の特性を示す他のパラメータ(単位長さ当りのインダクタンス、単位長さ当りの静電容量、単位長さ当りの抵抗、および単位長さ当りのコンダクタンスなど)を実験的に推定するのに用いられるテスト器である。
【0005】
TDRテスト技術における重要な測定値はテスト器が生成して伝送路に与えるテスト・パルスの飛行時間(TOF;time-of-flight)である。飛行時間は、伝送路に沿う2地点で検出されたパルスの通過時間で測定されてもよい。パルスの伝播速度の値と共に、飛行時間の測定値により、測定点の間の距離や、反射波の場合はパルス発射点からインピーダンスが変化してパルスを反射して戻る位置までの距離を得ることができる。
【発明の概要】
【発明が解決しようとする課題】
【0006】
TDR技術の基本的な限界は、損失があって分散的な伝送路でのTOF測定の精度が低いことである。短距離で、低損失で、低分散の伝送路でTOF値が比較的高いTDR精度で得られる唯一の理由は、伝播するテスト・パルスの形状と振幅とがTOF測定中に進む距離にわたって変わらずに保たれるからである。対照的に、分散的で損失のある長い伝送路では、この技術で用いられるテスト・パルスの形状と幅と速度とは進行中に変化する。
【0007】
また、損失があって周波数に依存する伝送媒体で高速通信を行うことは困難である。かかる伝送路でデータ伝送速度を高める方法が望ましい。
これまでのところ、飛行時間を正確に測定し、伝送路の長さや、損失があって分散的な伝送路の特性を示す他のパラメータを推定し、かかる伝送媒体を介して高速通信を可能にする方法および/または装置を提供するという要求はまだ満たされていない。必要なのは、かかる要求に対処する解決策である。
【課題を解決するための手段】
【0008】
以下の実施の形態に関するニーズがある。もちろん、本発明はこれらの実施の形態に制限されるものではない。
本発明の或る態様では、本質的に一定の伝播速度を有する波形を伝送路に沿って伝送する方法は或る指数波形を生成することを含む。この指数波形は(a)次の式
で表され、ただし、Dは大きさ、Vinは電圧、tは時間、ASDは減衰係数、vSDは伝播速度であり、(b)最大値で切り欠か(truncate)れる。本発明の別の態様では、減衰係数と伝播速度とを決定する機器は、指数波形発生器と、指数波形発生器の出力に結合する入力記録器と、指数波形発生器の出力に結合するテスト対象の伝送路と、テスト対象の伝送路に結合する出力記録器と、テスト対象の伝送路に結合する別の伝送路と、別の伝送路と接地とに結合する終端インピーダンスとを備える。
本発明のかかる実施の形態は、以下の説明と添付の図面とを参照すればよく認識し理解することができる。しかし、以下の説明は本発明の種々の実施の形態とその多くの特定の詳細とを示すものであるが、説明のためのものであって制限するものではないことを理解すべきである。本発明の精神から逸れることなくその範囲内で多くの代替、変更、追加、および/または再調整を行うことが可能であり、本発明は全てのかかる代替、変更、追加、および/または再調整を含むものである。
【図面の簡単な説明】
【0009】
本発明のいくつかの態様を示すために、この明細書の一部を形成する図面を添付する。本発明と、本発明で与えられるシステムの構成要素および動作との明確な概念は、図面に示す例示的な、したがって制限しない実施の形態を参照すれば明らかになる。同じ参照番号(2つ以上の図面に示される場合)は、同じまたは同様の要素を指す。本発明は、これらの図面の1つ以上とそこに示されている説明とを参照すればより良く理解することができる。図面に示されている諸機能は必ずしも寸法どおりに描かれてはいないことに注意していただきたい。
【図1A】本発明の或る実施の形態を表す、(x=0,t)についてのSD波形のグラフである。
【図1B】本発明の或る実施の形態を表す、移動するフレーム内のx’=l(x=l,t’)でのSD波形のグラフである。
【図2】本発明の或る実施の形態を表す、SDパラメータを測定するための装置のブロック図である。
【図3】本発明の或る実施の形態を表す、α=3.0×106/sであって、611.2m[2004ft]の伝送路(T1ケーブル)のx=0およびx=305.6m[1002ft]での電圧トレースで、4Vのしきい値で測定した飛行時間を示すグラフである。
【図4A】本発明の或る実施の形態を表す、x=0およびx=d(305.6m[1002ft])での電圧のSDしきい値重なり領域のグラフである。
【図4B】本発明の或る実施の形態を表す、α=3.0×106/sであって、305.6m(1002ft)のT1伝送路の測定された一定のしきい値飛行時間のグラフである。
【図5A】本発明の或る実施の形態を表す、x=0の電圧と、Rt=∞での電圧の1/2についてのSDしきい値重なり領域のグラフである。
【図5B】本発明の或る実施の形態を表す、α=3.0×106/sであって、611.2m[2004ft]のT1伝送路の測定された一定しきい値飛行時間のグラフである。
【図6A】本発明の或る実施の形態を表す、伝達関数を実験的に決定するためにT1ケーブルに与えられる入力パルスのグラフである。
【図6B】本発明の或る実施の形態を表す、T1ケーブルの305.6m[1002ft]で測定されたパルスのグラフである。
【図7A】本発明の或る実施の形態を表す、T1ケーブルに与えられる入力パルスのパワー・スペクトル密度のグラフである。
【図7B】本発明の或る実施の形態を表す、T1ケーブルの305.6m[1002ft]で測定されたパルスのパワー・スペクトル密度のグラフである。
【図8】本発明の或る実施の形態を表す、305.6m[1002ft]のT1ケーブルで実験的に得られた伝達関数のグラフである。
【図9】本発明の或る実施の形態を表す、最初の測定波形と、T1ケーブルの305.6m[1002ft]でのシミュレーション波形と、一定しきい値飛行時間とのグラフである。
【図10】本発明の或る実施の形態を表す、305.6m[1002ft]での電圧トレースの測定値とシミュレーション値との差のグラフである。
【図11】本発明の或る実施の形態を表す、最初のシミュレーション波形と、α=1.0×105/sであって、T1ケーブルの305.6m[1002ft]での波形と、一定しきい値飛行時間とのグラフである。
【図12】本発明の或る実施の形態を表す、最初のシミュレーション波形と、α=1.0×107/sであって、T1ケーブルの305.6m[1002ft]での波形と、一定しきい値飛行時間とのグラフである。
【図13A】本発明の或る実施の形態を表す、実験に基づく伝達関数と共に、シミュレーションにより決定されたSDパラメータVSDのグラフである。
【図13B】本発明の或る実施の形態を表す、実験に基づく伝達関数と共に、シミュレーションにより決定されたSDパラメータASDのグラフである。
【図14】本発明の或る実施の形態を表す、ZSD (α)を決定するための装置のブロック図である。
【図15A】本発明の或る実施の形態を表す、α=1.5×106/sのとき、種々の終端抵抗についてd=305.6m[1002ft]で測定された電圧トレースのグラフである。
【図15B】本発明の或る実施の形態を表す、α=1.5×106/sのとき、既知の終端トレースを持つ出力信号振幅と、開放された終端トレースの出力信号振幅の半分との比のグラフである。
【図16】本発明の或る実施の形態を表す、T1ケーブルの実験的に決定されたSDインピーダンスをαの関数として表すグラフである。
【図17】本発明の或る実施の形態を表す、直列に接続された24AWGより線対を通して、入力点と、〜1,830m[6kft]と、〜3,660m[12kft]と、〜5,490m[18kft]とで測定したSD電圧トレースとSD電圧トレースの自然対数とのグラフである。
【図18】本発明の或る実施の形態を表す、3,660m[12kft]でのフィルタのノイズに対する感度と応答の速度とを示す、SD領域の端を検出するのに用いられるグラフである。
【図19】本発明の或る実施の形態を表す、αにおける真空内の光の速度の割合としての1/√LCの変動のグラフである。
【図20】本発明の或る実施の形態を表す、3,660m[12kft]で測定された波形と共に示す、3,529.8m[11,573ft](上段)と、3,726.8m[12,219ft](中段)と、3,922.0m[12,859ft](下段)とにおける、減衰させて時間シフトした入力波形のグラフである。
【図21】本発明の或る実施の形態を表す、SD領域内の(V(予測)−V(測定))の標準偏差と相関領域内の推定距離とのグラフである。
【図22A】本発明の或る実施の形態を表す、3,725.9m[12,216ft]での(V(予測)−V(測定))と推定距離での(V(予測)−V(測定))の最小分散とのグラフである。
【図22B】本発明の或る実施の形態を表す、3,737.5m[12,254ft]での(V(予測)−V(測定))と推定距離での(V(予測)−V(測定))の分散とのグラフである。
【図23】本発明の或る実施の形態を表す、24AWG BKMA50ケーブルの〜1,830m[6kft]と、〜3,660m[12kft]と、〜5,490m[18kft]とで測定された電圧トレースと、SD予測に従って減衰させて時間シフトした印加波形とのグラフである。
【図24】本発明の或る実施の形態を表す、印加された切欠き(truncated)SDパルスと305.6m[1002ft]で開放された終端から反射された波とを示す、入力で測定された電圧トレースのグラフである。
【図25】本発明の或る実施の形態を表す、305.6m[1002ft]で開放された終端から反射された波と、最も適当に減衰させて順方向に時間シフトして611.2m[2004ft]の推定全距離を進んだ印加波とを示す、入力で測定された電圧トレースのグラフである。
【図26A】本発明の或る実施の形態を表す、305.6m[1002ft]の開いた終端を持つT1伝送路における、x=0での電圧のSD TDRしきい値重なり領域のグラフである。
【図26B】本発明の或る実施の形態を表す、α=6.7×106/sを持つ305.6m[1002ft]のT1伝送路において反射波の全推定進行距離が613.1m[2010ft]である、測定された一定しきい値TDR飛行時間のグラフである。
【図27】本発明の或る実施の形態を表す、印加切欠きSDパルスと305.6m[1002ft]で短絡終端から反射された波とを示す、入力で測定された電圧トレースのグラフである。
【図28】本発明の或る実施の形態を表す、305.6m[1002ft]で短絡終端から反射された波の反転と、最も適当に減衰させて順方向に時間シフトして611.2m[2004ft]の推定全距離を進行した非反転の印加入力波とを示す、入力で測定された電圧トレースのグラフである。
【図29A】本発明の或る実施の形態を表す、305.6m[1002ft]の短絡終端のT1伝送路におけるx=0での電圧のSD TDRしきい値重なり領域のグラフである。
【図29B】本発明の或る実施の形態を表す、α=6.7×106/sであって、305.6m[1002ft]のT1伝送路において612.4m[2008ft]の全推定距離を進行した、測定された一定しきい値TDR飛行時間のグラフである。
【図30】本発明の或る実施の形態を表す、305.6m[1002ft]のT1ケーブル(点線)と値Z0である抵抗器とに与えられた電圧パルスのグラフである。
【図31】本発明の或る実施の形態を表す、305.6m[1002ft]のT1ケーブル(点線)と値Z0である抵抗器とに与えられた電圧パルスの別のグラフである。
【図32】本発明の或る実施の形態を表す、より線対に与えられた波形とZ0に与えられた波形との差の伝達関数のグラフである。
【図33】本発明の或る実施の形態を表す、α=6.7×106/sを持つ印加シミュレーションSD波形と、伝達関数を用いて計算した反射波形とのグラフである。
【図34】本発明の或る実施の形態を表す、305.6m[1002ft]で開いた終端から反射された波と、最も適当に減衰させて順方向に時間シフトして611.2m(2004ft)の推定全距離を進行した印加波とを示す、シミュレートされた電圧トレースのグラフである。
【図35A】本発明の或る実施の形態を表す、305.6m[1002ft]の開放された終端のT1伝送路におけるx=0での電圧のシミュレートされたSD TDRしきい値重なり領域のグラフである。
【図35B】本発明の或る実施の形態を表す、α=6.7×106/sである305.6m[1002ft]のT1伝送路において611.5m[2005ft]の推定全距離を進んだ、シミュレートされた一定しきい値TDR飛行時間のグラフである。
【図36A】本発明の或る実施の形態を表す、611.2m[2004ft]のより線対の伝送路に与えられた補正なしのSD波形のグラフである。
【図36B】本発明の或る実施の形態を表す、611.2m[2004ft]のより線対の伝送路の100Ω終端で測定された補償なしのSD波形のグラフである。
【図37A】本発明の或る実施の形態を表す、611.2m[2004ft]のより線対の伝送路に印加された補正ありのSD波形のグラフである。
【図37B】本発明の或る実施の形態を表す、611.2m[2004ft]のより線対の伝送路の100Ω終端で測定された補償ありのSD波形のグラフである。
【図38】本発明の或る実施の形態を表す、611.2m[2004ft]のより線対の伝送路の入力で測定された一連の4つのシンボルのグラフである。
【図39】本発明の或る実施の形態を表す、611.2m[2004ft]のより線対の伝送路の100Ω終端で測定された一連の4つのシンボルのグラフである。
【図40】本発明の或る実施の形態を表す、線形領域の最小平均二乗当てはめ(fit)を示す、シンボル期間毎に611.2m[2004ft]の100Ω終端で測定された電圧の自然対数グラフである。
【図41】本発明の或る実施の形態を表す、Xi=e(αo+(i−1)・Δα)・tのグラフである。
【図42】本発明の或る実施の形態を表す、直交ベクトル集合Y=[Y1,Y2,Y3,Y4,Y5]のグラフである。
【図43】本発明の或る実施の形態を表す、非直交波形Y’=[Y1,Y2,Y3,Y4,Y5]・sin(πt/7×10-6)のグラフである。
【図44】本発明の或る実施の形態を表す、2,440m[8000ft]での受信機での分散された波形Y’のグラフである。
【図45】本発明の或る実施の形態を表す、入力と2,440m[8000ft]での補正パルスCのグラフである。
【図46】本発明の或る実施の形態を表す、補正パルスZ=Y’+b・Cを持つ入力での成分関数のグラフである。
【図47】本発明の或る実施の形態を表す、2,440m[8kft]での成分関数Zのグラフである。
【図48】本発明の或る実施の形態を表す、伝送されて2,440m[8kft]で直交波形を生成する1次独立波形Sのグラフである。
【図49】本発明の或る実施の形態を表す、2,440m[8kft]で受信された直交波形Sのグラフである。
【図50】本発明の或る実施の形態を表す、直交集合Sの生成アルゴリズムの流れ図である。
【図51】本発明の或る実施の形態を表す、Sの4つの直交パルスのそれぞれに5ビットで符号化された3つの連続伝送シンボルQのグラフである。
【図52】本発明の或る実施の形態を表す、Sの4つの直交パルスのそれぞれに5ビットで符号化された、2,440m[8kft]での受信機の入力での3つの連続伝送シンボルQのグラフである。
【図53】本発明の或る実施の形態を表す、−140dBm AWGNを含んで伝送されたデータの1秒間、すなわち1.67×106ビットの間の信号誤差(a(期待)−a(検出))のヒストグラムのグラフである。
【発明を実施するための形態】
【0010】
本発明とその種々の特徴および利点について、添付の図面に図示し以下の記述に詳細に説明している制限的でない実施の形態を参照して十分に説明する。本発明の詳細を不必要に分かりにくくしないために、周知の開始材料、処理技術、構成要素、および装置の説明は省略する。しかし詳細な説明と特定の例は、本発明の特定の実施の形態を示すものであるが、単なる例示であって制限するものではないことを理解すべきである。本発明の基礎となる精神および/または範囲内の種々の代替、変更、追加、および/または再調整は、この開示から当業者に明らかになる。
【0011】
この出願では、いくつかの文献を括弧内の数字で参照する。かかる文献の完全な引用は、明細書の末尾と特許請求の範囲との間の参照文献の部に示されている。本発明の背景とこの技術の現状を示すために、全てのこれらの文献の開示全体をここに援用する。
【0012】
以下に参照する米国特許出願はその意図する目的を満たした実施の形態を開示している。米国特許出願第09/519,922号、2000年3月7日出願、の全内容を全ての目的でここに援用する。
一般に、本発明の文脈は信号伝送を含んでもよい。本発明の文脈は伝送路パラメータを測定しまた推定するための方法および/または機器を含んでもよい。また本発明の文脈は損失があって分散的な伝送路で高速通信を行うための方法および/または機器を含んでもよい。
【0013】
この技術で価値を有する本発明の実際的な応用は時間領域反射率測定である。また、本発明は損失のある伝送路に関して有用である。また、本発明は周波数に依存する伝送路に関して有用である。この技術で価値を有する本発明の別の実際的な応用は高速通信である。本発明には事実上無数の他の用途がある。実際上、信号の伝送に関する全ての応用に有用である。
本発明の或る実施の形態を表す、制御可能な減衰と伝播速度とを有する波形を伝送する方法は、費用的な有効性が高くて優れている。本発明は従来の方法に比べて質が高く、および/または費用が安い。
【0014】
本発明は、本発明者が高速送出し(SD;Speedy Delivery)波形と名付けた切欠き波形を用いる方法および/または機器を含む。結合された損失のある伝送路内のSD伝播の分析を示し、またSD波形の切欠き(truncate)に関連する実際的な検討を行う。SD波形の伝播を記述するのに用いるパラメータを定義し、その値を決定する方法を示す。かかるパラメータは、高速送出し伝播速度vSD、高速送出し減衰係数ASD、および高速送出しインピーダンスZSDを含む。かかるパラメータは、伝送媒体の特性と指数係数α(SD入力信号パラメータ)とに依存してよい。
【0015】
本発明は結合された伝送路内のSD信号の伝播を説明する。2本の伝送路を含む実施の形態を示す。多数の結合された伝送路を含む一層複雑な構成は、この開示を見れば当業者は容易に開発することができる。また、単一モード通信ファイバ内の切欠きSD信号を含む光パルスの緩やかに変化する包絡線の伝播の挙動を説明する。
【0016】
本発明は、SDテスト・パルスを用いて損失のある伝送路内のSD信号の伝播パラメータASDおよびvSD(周波数に依存するパラメータを含む)の実験的な推定値を得る方法を教示する。或る較正ケーブルの長さについてvSDの値を決定すると、一定しきい値飛行時間測定値を用いて同様のケーブル内の不連続(断絶)点までの距離を測定することができる。較正手続きは、指数係数α毎に実験的に繰返すことができる。
【0017】
本発明は、広帯域の非SD波形を用いて所定の伝送媒体の較正長さについて実験的な伝達関数を作成する方法を与える。この伝達関数を用いて、広範囲の指数係数αの値を持つSD波形の伝送をシミュレートすることができる。SDパラメータASD(α)およびvSD(α)はこれらのシミュレートされた波形から決定することができる。較正プロセスにシミュレーション・ステップを含めることにより、αの種々の値についてASD(α)およびvSD(α)の値を決定するのに必要な実験的な測定を大幅に減らすことができる。これにより、SD波形発生器を必要とせずに媒体のSDの性質をシミュレーションにより決定することができる。
【0018】
本発明は伝送路のSDインピーダンスを決定する方法を教示する。また、ZSDの予測可能な変動をαの関数として示す。この予測可能性を用いると、設計者はパラメータαを適当に選択することにより伝送路のSDインピーダンスを制御することができる。
また本発明は、損失が大きくて長い伝送路において、切欠きSDテスト・パルスを用いた別の精密な距離測定法を説明する。テスト・パルスがかかる伝送路を進むと減衰が大きくなるため、その振幅が小さすぎて、普通のようにしきい値と交差する飛行時間の測定ができないことがある。本発明は減衰を予測してこの困難を克服し、長い損失のある伝送路の正確な長さ測定値を得る方法を含む。
【0019】
本発明はインピーダンス不連続点までの距離を正確に決定するのにSDテスト波形が有用であることを示す。正確な時間領域反射率測定(TDR)装置の基礎としてSD波伝播を用いる方法の例を示す。この装置は、SD波形発生器、伝送媒体と結合する手段、印加波形と反射波形とを測定する手段、ディスプレイ、記憶装置、およびSD波形を分析し解釈する計算機能を含んでよい。本発明はコンピュータも含んでよい。本発明は精度を高めるために現在利用可能なTDR装置を変更する方法を含んでよい。この変更はTDRソフトウエアの変更であって、装置製作コストを再び必要としないものであってよい。標準のTDR波形を用いてテスト対象となる伝送路の実験的伝達関数を決定してよく、次にこの伝達関数を用いてSD波形の伝播をシミュレートしてよい。このプロセスにより、既存の計算アルゴリズムを変更するだけで全てのSDの利点を現在利用可能な装置に組み込んで、仮想SD TDR装置を作ることができる。
【0020】
切欠きSDテスト・パルス方式はソナーおよび地球物理学応用における音波の伝播にも適用することができる。反射音信号を用いて水面下の物体の位置を正確に決定し、また地球物理的層境界の位置を決定することができる。実験的伝達関数を決定し、これを用いてSDパルス伝播をシミュレートするので、複雑な音パルスを物理的に生成する必要がなくなる。
本発明は損失があって周波数に依存する伝送媒体内でデータ伝送方式を強化するのに適した複数の伝播特性を有するSD波形を与える。
【0021】
本発明は、αの値を変えてデータを切欠きSD波形上に符号化することにより、パルス当たりに伝送されるビット数を増やす方法を与える。ここに示す例は、610m[2kft]のケーブルで連続的に伝送される、4つの異なるαを持つSDパルスを用いる。かかるSDパルスは、指数定数に歪を与えずにケーブルの端で受信される。4つのパルスは正または負の信号として伝送されるので8つの可能な状態を作る。したがって、各パルスは各シンボル期間内で3ビットの伝送情報を表す。この方式は、短距離で低損失の伝送路で用いることができる。
【0022】
また本発明は、受信機で直交する切欠きSD波形の1次結合から成るパルスの集合を生成するのにSD伝播特性を用いる方法を教示する。その振幅を変えることによりデータをこれらのパルスに符号化して、これらの振幅変調パルスを伝送路で同時に伝送することができる。その直交性を利用して、個別のパルスの振幅を受信機で計算する。この方法はノイズに対して強いので、長くて損失の大きな伝送路で用いることができる。
また本発明はディジタル回路、特にオンチップ・クロック回路にSD波形を用いることを教示する。切欠きSDクロック波形を用いてクロック・スキュー(clock skew)を減らす方法を提供する。
【0023】
伝送路内の高速送出し(SD)波形の伝播は、次の式
で記述することができる。伝送路の入力での関連する境界条件はV(x=0,t)=Deαtである。ただし、ASDはSD信号の減衰を或る固定の時刻で伝送路に沿う距離の関数として記述する指数係数であり、vSDはSD信号伝播速度である。これらの量の関係は簡単な式ASD(α)・vSD(α)=αで表される。伝播する波のパラメータASDおよびvSDと伝送路境界条件とは全てαの関数であり、伝送路について実験的に決定してよい。
【0024】
2本の平衡なより線対の伝送路の場合は、差電圧を2本の線に等しく分割して、この対の各線の電流を、大きさは等しいが方向は逆にすることができる。この場合は、電信方程式を次のように書くことができる。
この分析はネット・クロス静電容量Cijとネット・クロス・インダクタンスMijとを含む。クロス抵抗とクロス・コンダクタンスの項は無視する。次にこれらの式をラプラス変換により複素周波数領域に変換する。
【0025】
上側の式をxについて偏微分し、
項について下側の式を代入すると、
すなわち、
が得られる。この式のシステムは次の解を有する。
【0026】
半無限の伝送路の対についての境界条件、x=0でのV(x=0,s)と、
とを与えると
が得られる。
は複素対称マトリクスなので、
と書くことができる。ただし、
は
積の固有マトリクスであり、
は
の対角固有マトリクスである。したがって、
と書くことができる。これから、
が得られる。
【0027】
x=0で与えた境界条件がSD波形
の場合は、SD解は
である。ただし、P(αi)は実マトリクスである。
【0028】
P-1をQで表すと次のように書くことができる。
すなわち、
すなわち、
【0029】
固有ベクトル・マトリクスP、その逆である、P-1=Q、およびSDパラメータDに関連する実定数は次のように書くことができる。
A11=D1P11(α1)Q11(α1)
A12=D1P12(α1)Q21(α1)
A21=D2P11(α2)Q12(α2)
A22=D2P12(α2)Q22(α2)
B11=D1P21(α1)Q11(α1)
B12=D1P22(α1)Q21(α1)
B21=D2P21(α2)Q12(α2)
B22=D2P22(α2)Q22(α2)
【0030】
伝送路の信号は次式で表される。
すなわち、
ただし、
したがって、各αで評価された積
の各固有値γiに関連するSD減衰と速度とがわかる。
【0031】
正の指数波形は増加し続けるので、実際的に考えると、特定の応用により決まる或るレベルで波形を切り欠く、すなわち制限する必要がある。切欠きはこの技術で周知のいくつかの方法で行ってよい。
伝送媒体の入力をこのように切り欠くと、伝播する指数(SD)信号も媒体内を進むに従って大きさが制限され、損失のある媒体では、この最大振幅は進む距離と共に減少して減衰の性質を示す。
伝播する(SD)信号は座標フレーム(x,t)で次のように記述される。
ただし、ASD(α)vSD(α)=αである。
【0032】
図1Aは(x=0,t)のSD波形のグラフで、t=tiで限界に達するx=0での切欠き入力波形を示す。
4パラメータ(LCRG)伝送路の場合は、次式が得られる。
進行するSD波の減衰を、速度
で進む移動基準フレームの視点から考えてもよい。
【0033】
新しい座標系、
を導入すると、
すなわち、
【0034】
伝送媒体内を距離x=x’=lだけ進んだ後の進行波を見ると、
t’=tiとすると、x=lでの切欠きSD波形の最大値が得られ、任意の値0≦tj≦tiについて移動基準フレームのx=lでの関係する点tjでの信号の値は、
である。
【0035】
図1Bは、移動するフレームのx’=l(x=l,t’)でのSD波形のグラフを示す。この切欠き波形の減衰は次の比で定義される。
そのラプラス変換が
である周波数に依存するパラメータを有する伝送路内を進む切欠きSD波形の点tjでの信号のこの減衰は、
ただし、
【0036】
また、周波数に依存するパラメータを有するこの伝送媒体内で、指数振幅切欠き限度に達したときに入力指数パルスを急速に閉じると、伝送されるパルスのリーディング・エッジの指数領域の終端の振幅は更に減少して、波長分散により波形が崩れる。
結合された伝送路は同じ方法で扱うことができる。2つの結合された伝送路の一方のSD伝播を支配する式は次の通りである。
【0037】
とx’=xとを代入すると次式が得られる。
これを書き直すと、
【0038】
別の例は単一モード通信ファイバ内の光パルスの緩やかに変化する包絡線E(x,t)の展開を含む。シュレージンガの偏微分方程式[3]
はファイバ内で波長分散によって伝播するパルス包絡線の形の展開を記述する。色分散が起こる理由は、モード伝播定数β(ω)が角周波数ωの非線形関数だからである。ただし、
であり、ω0はファイバ内で変調される光の周波数である。
ω0/β0はパルスの位相速度である。1/β1は群速度、β2はファイバ内で伝播するときにパルスを広げる群速度分散(GVD;Group Velocity Dispersion)パラメータ、β3は3次分散(TOD;Three-order Dispersion)パラメータ[4]である。
【0039】
ωに関するβの高次の微分は無視する。しかしこの技術の当業者はこの分析でこれを追加してよい。ファイバ減衰はパラメータγで表される。
損失を有する、すなわち、
の1次シュレージンガ方程式のSD解は
【0040】
x=0でのファイバへの入力での境界条件は
である(α=1/T0の場合の図1Aを参照)。光ファイバ通信網内の受信機の検出器は伝播するパルス包絡線の大きさの自乗
に応答する。この場合は、
ただし、包絡線の切欠きSDリーディング・エッジの伝播速度は
である。ただし、vsd(T0)・A(T0)=1/T0であることに注意する。
【0041】
群速度1/β1で進む移動基準フレームに変換するには、
t’=t−β1x
x’=x
この移動基準フレーム内のSD伝播速度は
パルス包絡線のリーディング・エッジの切欠きSD部分の減衰は、
この結果は、T0を十分小さくすることができれば、この減衰を小さくすることができることを意味する。この分析では含めなかったが、β(ω)の高次の項はT0が小さくなるとかなり影響が大きくなる。
【0042】
例
本発明の特定の実施の形態について、いくつかの詳細な特徴を示す以下の制限しない例により更に説明する。以下の例は本発明を実施する方法の理解を助けるために述べるものである。認識されるように、以下の例は本発明を実施するときに十分機能することを確認した実施の形態を表し、本発明の実施において好ましいモードを持つものと考える。しかし認識されるように、開示される例示的な実施の形態に多くの変更を行っても、本発明の精神と範囲から逸れることなく同様のまたは同じ結果を得ることができる。したがって、各例は本発明の範囲を制限すると考えてはならない。
【0043】
例1
SD波形パラメータASDおよびvSDを決定する方法
この例は、損失があって分散的な伝送路内のSD波形の伝播を記述する伝送路パラメータASDおよびvSD(周波数に依存するパラメータを含む)の実験的推定値を、SDテスト・パルスを用いて得る方法を教示する。ASDおよびvSDの数値はαの関数として実験的に決定することができる。
図2は、銅のより線対伝送路のこれらのパラメータを決定するのに用いてよい実験装置を示す。伝送路のテスト長さdと、与えられたSD入力信号のαの値とを測定する。テスト対象の伝送路と同じ長さの追加の伝送路を図のように取り付けて開放回路で終端する。この例のケーブルは、T1ケーブルの305.6m[1002ft]コイルの2本の24AWG、個別シールドのより線対である。
【0044】
DとαとSD信号の継続時間との値を、テスト伝送路内を伝播するSD信号の最初の飛行時間中に測定点dで反射が起こるのを防ぐように選んだ。また伝送路の追加の長さにより、伝播するSD波形のdでの測定が完全に終わるまでテスト伝送路内で起こる全ての反射を遅らせることができる。
伝播するSD波形が一定電圧しきい値と交差するタイミングで、SD信号の飛行時間を直接測定することができる(図3)。伝送路内のSD信号伝播速度の値vSDは、TOF=(tf−t0)=vSDdの関係を用いて計算することができる。図4Aに再び示すこれらの波形の飛行時間を1.2ボルトから4.8ボルトまでのしきい値について図4Bにプロットした。図4.3bに示すしきい値重なり領域の平均TOFは1,716nsである。このTOFから、
vSD=d/TOFAVG=305.6m[1002ft]/1,716×10-9s=1.781m×108m/s[5.839×108ft/s]。
【0045】
SD減衰係数ASDは、ASD・vSD=αの関係を用いてαとvSDとから計算することができる。図4.3aに示す波形から得られる計算されたASDは
ASD=α/vSD=(3.0×106/s)/(1.781×108m/s)[5.839×108ft/s]=16.845×10-3/m[5.138×10-3/ft]。
ケーブルの較正された長さについてこの速度が分かると、この型のしきい値を交差するTOF測定値を用いて同じ伝送路の別のサンプルの未知の長さを決定することができる。
【0046】
図5Aを参照すると、直列に接続されたT1伝送路内の2つのより線対について測定された入力電圧が示されており(図2参照)、T1伝送路内の開放された終端の第2のより線対(図2で
の場合)の端で測定された電圧の半分を示す。図5Bに示すしきい値重なり領域の平均TOFは3,418nsである。この飛行時間と前に較正したvSDとから得られた推定距離は608.8m[1,996ft]で、これは実際の長さ611.2m[2004ft]の99.6%である。
【0047】
図5Aは、切欠きSDパルスの減衰のために、より長い伝送路で起こり得る問題も示す。SDしきい値重なり領域はパルスが伝播するに従って小さくなり、距離が更に長くなると減衰する。この測定の精度は改善することができるし、非常に長い伝送路でしきい値重なり領域が減少することにより起こる問題は例4で説明するTOF測定方法を用いて克服することができる。
【0048】
この方法の精度が高い理由は、信号しきい値振幅の或る範囲にわたって得たTOF測定値の平均を用いるためである。これらの値の平均を用いればTOFの測定の精度を向上させることが可能である。なぜなら、波形のリーディングSDエッジ上の全ての点は同じ速度で進むからである。これは、現在の時間領域反射率測定技術が分散するテスト・パルスの発生時刻を測定しようとするのとは対照的である。これは、パルスの傾斜もほぼゼロのときに、ゼロしきい値レベルにおけるパルスのしきい値と交差する時刻を正確に測定しようとするのと同じである。
【0049】
例2
実験的伝達関数からSDパラメータを抽出する
例1で述べた方法は、指数係数α毎に実験的に繰り返す必要があるという点で限界がある。これはケーブルの種類毎に実験室で長い較正時間を必要とする。較正のプロセスにシミュレーションを含めれば、ASDおよびvSDの値を決定するのに必要な実験的測定を大幅に減らすことができる。このプロセスでシミュレーションを用いるには、特定の種類のケーブルの応答を記述する伝達関数が必要である。T1ケーブルについて分析されるαは1×105/sから107/sの範囲である。αのこの範囲は16kHzから1.6MHzの周波数帯域に対応するので、伝達関数はこの範囲で正確でなければならない。ケーブルの伝達関数はメーカから得てもよいし、既知のパルスを与えて、与えられたケーブル入力波形とケーブルに沿う或る既知の(較正)距離での応答波形とを測定することにより、実験的に決定してもよい。伝達関数は入力パルスと出力パルスとの高速フーリエ変換(FFT)の比、すなわち、
Hest(jω)=FFT(V(lでの測定値))/FFT(V(与えられた値))
から計算する。伝達関数が決定されると、αの一連の異なる値を有するSD波形の伝播をシミュレートして、飛行時間とSDパラメータASDおよびvSDを決定することができる。
【0050】
この方法を、例1で用いたT1ケーブルについて示すことができる。全長611.2m[2004ft]の端を100オーム抵抗器(図4.1のRt)で終端させて、305.6m[1002ft]の測定点での反射を最小にした。図6AはT1に与えた測定入力パルスを示す。図6Bは305.6m[1002ft]で測定した出力パルスを示す。図7A,7Bは測定パルスのパワー・スペクトル密度を示す。正確な伝達関数を実験的に推定するのに十分のエネルギーが対象の周波数帯域内にあることを示すためにαの範囲を示す。測定信号から決定された伝達関数の大きさと位相とを図8に示す。
【0051】
伝達関数が分かると、対象とする表示された範囲内で任意のαを有する波形をシミュレートして、ASDおよびvSDの値を決定することができる。セクション3の測定されたSD波形のASDおよびvSDの値はαが3×106/sにおける伝達関数のテストを与える。図9は、セクション2で測定した入力信号を用いて決定した飛行時間のプロットと、実験的伝達関数を用いたシミュレーションにより予測した305.6m[1002ft]での波形とを示す。シミュレーションTOFの1,714nsという結果(図9)は実験的に測定した(図5B)TOFが1,716nsとほとんど同じである。図10は、305.6m[1002ft]で測定した波形と305.6m[1002ft]でシミュレートした波形(図9の上側)との差を示す。SD伝播領域の間では、この差は±20mV程度である。
【0052】
最初のSD波形をシミュレートし、伝達関数を用いて305.6m[1002ft]での波形を予測することにより、αの範囲で、このプロセスが行われる。全ての場合に、シミュレートした最初の波形を1μsの傾斜で閉じてその高周波成分を減らした。図11,12は、αの端点1×105/sおよび1×107/sについてのシミュレートした入力および305.6m[1002ft]での曲線と、それぞれの一定しきい値飛行時間曲線とを示す。αの範囲に対してシミュレーションからのvSDおよびASDの値を図13A,13Bに示し、また以下の表Iに示す(括弧内の*印の値は、例1の方法を用いて、実際のT1伝送路に沿って測定された入力および出力SD信号で得られたものである)。
【表1】
【0053】
例3
SD伝送路インピーダンスの測定
SD伝送路インピーダンスZSD(α)は、対象とするαについて決定される実数である。周波数に依存する伝送路パラメータのラプラス変換
が分かっている場合は、ZSD(α)は次式から計算することができる。
【0054】
SD伝送路インピーダンスZSD(α)は、テスト伝送路について種々の既知の終端インピーダンスにかかる電圧波形のSD部分を測定してこの測定値からZSD(α)の値を計算することにより、実験的に決定することもできる。終端で測定したSD波形VSD(Rt)は、入力SD波形V+SDと反射SD波との和から成る。反射波はSD反射係数Γと入力波との積である。終端で測定したSD信号は
VSD(Rt)=(1+Γt)・V+SD=2Rt・V+SD/(Rt+ZSD)
である。SD信号の全ての集中および分散インピーダンス値は実数値である。
【0055】
伝送路の測定値からZSDを決定するのに用いられる実験装置を図14に示す。305.6m[1002ft]のT1伝送路の電圧の入力および終端の測定波形を図15Aに示す。これらの測定は、αが1.5×106/s、終端抵抗が49.5オーム、98.6オーム、および開放された回路で行った。反射のない波形(入力波形V+SD)の大きさは、開放された終端
で測定した信号を2で割って決定する。既知の終端波形と入力波形との比VSD(Rt)/V+SDを用いると、終端抵抗毎の反射係数Γtの直接測定値Γt=(VSD(Rt)/V+SD)−1が得られる。図15Bはこのケーブルとαについての測定比を示す。伝送係数の関係、1+Γt=2Rt/(Rt+ZSD)を用いると、ZSD=Rt(1−Γt)/(1+Γt)が得られる。
【0056】
Rtの2つの有限値98.6Ωと49.5Ωとを用いると、このT1ケーブルのZSDの2つの推定値が得られる。
このプロセスを5×105/sから10×106/sのαについて繰返した結果を図16に示す。
【0057】
例4
長い伝送路長若しくは反射波を用いるインピーダンス変化に対する距離の精密測定
この例は、高い損失を有する長い伝送路において、テスト・パルスの減衰が非常に大きくて、伝送路を進むとその振幅が余り小さくなるので普通のしきい値横断測定を行うことができない場合の、SDテスト・パルスの別の精密TOF測定法を記述する。
【0058】
波形が減衰すると、一定電圧しきい値で測定した飛行時間を推定することが困難になる。これは、約1,830m[6kft]、24AWG、50対のより線対の電話ケーブルに沿う電圧トレースを調べると分かる(図17参照)。50対の中の3対を直列に接続して、3つの等しい長さの部分を持つ約5,490m[18kft]のケーブルを生成した。与えられたSD入力波形はDeαt、ただし、Dは0.19ボルト、αは3.5×105/sである。このαは610m[2kft]のT1ケーブルに用いたαの約10分の1である。セクション2で説明したように、かかる長い距離にわたって伝播パルスの切欠きSDリーディング・エッジの減衰を小さくするには、αを小さくする必要がある。これにより、長い距離にわたって信号を検出することができる。このケーブルのASDおよびvSDとαとの値は例1の手続きを用いて決定した。これらの測定値は、電話ケーブル内のより対長さ毎に1,830m[6000ft]の較正長を前提としたことに基づく。その結果は、vSD=1.326×108m/s[4.348×108ft/s]とASD=27.144×10-4/m[8.279×10-4/ft]である。
【0059】
信号は1,830m[6kft]より遠い距離でも検出可能であったが、一定しきい値飛行時間は測定できなかった。図17は、入力と、〜1,830m[6kft]と、〜3,660m[12kft]と、〜5,490m[18kft]との距離で測定した電圧トレースを示し、また大幅に減衰した伝播波形のSD領域の形状が維持されることを示す。5,490m[18kft]のトレースは、測定波形を2で割ることにより開放された終端からの反射に対して訂正されている。最後の2つのトレースは、この小さなαでも3,660m[12,000ft]を超えると0.19ボルトより大きなSD信号がほとんどないことを示す。これは入力SD波形パラメータDの値であり、入力SD波形とこれらより長距離でのSD波形とに共通するSD電圧しきい値はほとんど存在しない。
【0060】
大幅に減衰したSDパルスの飛行時間を正確に測定する第1のステップは、ケーブルに沿う距離lで測定し記録した伝播するパルスV(t)のSD領域を検出することである。このためは、測定パルス波形の比
を計算する。パルスのSD領域では、この比はαである。次に、この比がαから発散する時刻を検出することによりSD領域の端を見つける。また比
を用いてSD領域の端を検出することもできる。SD領域では、この比はやはりαである。後者の2次導関数と1次導関数との比は、応答は早いが、1次導関数と信号との比に比べてノイズに影響されやすい。3,660m[12kft]で測定したSD波形について、これらの比を時間の関数として図18にプロットした。一般に任意の正のnについての比
はこの性質を有する。
【0061】
更に、信号とその積分との比を用いてSD領域の位置を定めることができる。SD領域では次の関係がある。
したがって、時間が経つに従ってこの比はαに収束する。この比はSD領域の端で発散する。一定の伝送路パラメータを有する損失のある伝送媒体では、推定SD領域の端は媒体内の光の速度を決定するための良いマーカである。パルスの切欠きSDリーディング・エッジは、周波数に依存するパラメータを持っていても分散しない。しかし閉じたパルスの高周波成分は分散する。かかる高速の高周波成分は、パルスが伝播するに従って切欠きSD領域の端を侵食する傾向がある。長距離では、かかる高周波成分も大幅に減衰するので、SD領域の侵食の量は進んだ距離に比例しない。この場合は、SD領域の検出された端はパルスの飛行時間、すなわち波が進んだ距離の最初の推定値として使えて、次のステップでより正確な飛行時間測定値を調べる領域を定義するのに役立つ。
【0062】
距離dを伝播した切欠きSD信号の減衰は
で示された。かかる伝送路に時間領域反射率測定(TDR)を適用するとき、パラメータ
を一般にVpで表し、真空中の光の速度の分数として与えられる。この空気コア・ポリ24AWGケーブルではTDRで用いられるVpの標準値は0.67である。しかし、この分析で用いた比の値は0.59である。この理由を図19に示す。0.67という値はかかる電話線をテストするのに用いる標準TDRパルス内に見られる高周波では適当であるが、かかる長距離伝送路内の低い切欠きSD信号減衰についてここで選択したαは低周波と同等であって、より低い速度で伝播する。
【0063】
伝播するパルスのリーディング・エッジにおけるSD領域の端の最初のTOF推定値が距離lで得られると、進行する波のSD領域の端が最初のSD波形の切欠き点に対応すると仮定して入力波形を減衰させて時間シフトする(図20の上段)。次に、進行するそれぞれの新たな推定進行距離に基づいて入力波形が漸増的に時間シフトされて減衰される。距離を推定する度に、このシフトして減衰させた入力波形が測定波形から差し引かれる。直流電圧オフセットもノイズもない場合は、推定距離が実際の距離に等しいときSD領域内でのこの差はゼロである。なぜなら、ノイズは常にあるし、ケーブルに沿って種々の点で差分直流オフセットはしばしば変化するので、各推定距離でこの差の変動が評価される。入力波形を実際の進行距離までシフト(平行移動)したときこの相関は最小になる(図20の中段)。
【0064】
伝送路の間に直流差分オフセットがある場合は、この最小値はゼロでない。この推定距離では、閉じるパルスからの分散による切欠きSD領域の端の侵食は明らかである。波形を余り大きくシフトするとこの偏差誤差測定値は大きくなる(図20の下段)。図21は、シフトさせて減衰させた入力波形と第2および第3のより線対の間の接続点で測定したSD波形との差の標準偏差を、推定距離の関数として計算したものを示す。最小値は推定距離3,725.9m[12,216ft]で生じる。図22Aは2つの波形の差と最小値での波形の差の分散とを示す。図22Aは、2つの測定点の間に5から10ミリボルトの差分直流オフセットがあることを示す。図22Bは、推定距離が最小点に関連する距離より11.6m[38ft]長いときに分散が増加したことを示すために提示した。
【0065】
このプロセスを、減衰入力波形から測定波形への最適当てはめシフト位置を知るために平均距離1,864.5m[6,113ft]と、3,725.8m[12,216ft]と、5,589.7m[18,327ft]とを用いて8回繰り返した。3つの長さの標準偏差はそれぞれ0.31m[1ft]、0.31m[1ft],1.53m[5ft]であった。これらのデータ集合の1つに関連する当てはめを図23に示す。ケーブルの実際の長さは正確には分からなかったが、ケーブル内の各対は平行であり、長さの差は小さく、より率が異なるのがその原因である。このプロセスから、2つの長さの距離は1つの長さの距離の2倍の3.05m[10ft]以内である。3つの長さの距離は1つの長さの距離の3倍の3.36m[11ft]以内である。1,830m[6kft]の距離を標準として用いると、不一致は3,660m[12kft]の長さでは−0.08%、5,490m[18kft]の長さでは−0.06%である。
【0066】
例5
時間領域反射率計(TDR):反射波を用いるインピーダンス変化に対する伝送路距離の精密測定
時間領域反射率計(TDR)は伝送路内の欠陥を見つけ、伝送路の長さや伝送路の特有の他のパラメータ(単位長さ当たりのインダクタンス、単位長さ当たりの静電容量、単位長さ当たりの抵抗、単位長さ当たりのコンダクタンスなど)を実験的に推定するのに用いるテスト器である。TDRテスト技術における基本的な測定値は、テスト器が生成して伝送路に与えるテスト・パルスの飛行時間(TOF)である。この飛行時間は伝送路に沿う2地点で検出されたパルスの通過時間を測ることにより測定してよく、時間領域伝送測定値(TDT)と呼ばれている。また時間領域反射測定の場合は、1地点でのパルスの発射時刻と、パルスが伝送路に沿う或る距離で欠陥または他のインピーダンス変化から反射された後で同じ地点まで戻るパルスの復帰時刻とを推定する。かかるTOFの測定値とパルスの伝播速度の値とで、測定点の間の距離を得ることができる。また反射波の場合は、パルス発射点から、インピーダンスが変化したためにパルスが反射されて発射点に戻る位置までの、距離を得ることができる。
【0067】
TDR技術の基本的な限界は、損失があって分散的な伝送路でのかかるTOFの測定値の精度が低いことである。短距離で、低損失で、低分散の伝送路で得られるTOF値のTDR精度が比較的高い理由は、伝播するテスト・パルスがTOFの測定中に進んだ距離にわたってその形状と振幅が変わらずに保たれるからである。対照的に、分散的で損失のある長い伝送路では、この技術で用いられるテスト・パルスは進むに従って形状や振幅や速度が変わる。かかる環境下でこの技術で用いられるTOF測定の重点は、テスト・パルスのリーディング・プロフィールの出現時刻を推定することである。この技術で用いられるテスト・パルスのシグネチャのこの部分は信号レベルが低くまた信号傾斜が小さいことが特徴で、パルス出現時刻を正確に測定することは困難である。
【0068】
そのリーディング・エッジに切欠きSD信号を含むテスト・パルスを用いることにより、TDR技術は損失があって分散的な伝送路でいくつかの利点を有する。この切欠きSDリーディング・エッジは形状を変えずにかかる伝送路を或る一定速度で進む。このSDエッジの伝播速度は伝送路パラメータとSD信号パラメータαとの関数で、αを変えることにより制御することができる。テスト・パルスの切欠きSDリーディング・エッジは損失のある伝送路を進むに従って減衰するが、この減衰率も伝送路パラメータとSD信号パラメータαとの関数であって、αを変えることにより制御することができる。
【0069】
TDRの場合と同じ原理を伝送路内の電磁波以外の波形に適用することができる。SONARまたは地球物理学的な応用では、このセクションで説明した方法を用いて音波の反射を分析して、正確な飛行時間と距離の推定値を与え、また伝送媒体の特徴を定めるのに用いることができる。
例1と例2とに説明したように、TDR応用に於けるSDテスト波形の精度はT1ケーブルを用いた例により示すことができる。T1ケーブル内の2つのより線対を直列に接続して611.2m[2004ft]のケーブルを形成し、切欠きSD信号を入力に与える。電圧トレースを305.6m[1002ft]での2つの伝送路の接続点で測定する。これにより、測定点で伝送路インピーダンスの不一致があっても訂正する必要がなくなる。与えられた波の指数係数αは6.7×106/sである。SDパラメータASDおよびvSDは例2に示した実験的伝達関数分析から得られる。表Iのデータから内挿することにより、このαについてASDは35.092×10-3/m[10.703×10-3/ft]、vSDは1.914×108m/s[6.276×108ft/s]という値が得られる。
【0070】
最初の例ではケーブルを開放された回路で終端させる。開放された回路の反射係数は+1で、これは正の反射になる。図24は305.6m[1002ft]の点で測定した電圧波形を示し、順方向に進む印加波と、ケーブルの端で開放された終端から反射された波とを示す。図25は、測定された反射波と、例4の手続きに従って時間シフトさせて減衰させた印加波との結果を示す。このプロセスでは、反射波の全進行距離の測定値は611.2m[2004ft]、より正確にはこのより線対セクションの長さ305.6m[1002ft]の2倍である。図26A、26Bは例1で説明したTOFの一定しきい値タイミング法の結果を示す。この方法によると飛行時間は3,203nsで、これから推定される全進行距離は613.1m[2,010ft]である。これから得られる推定されるより線対セクションの長さは306.5m[1005ft]で、誤差は0.9m[3ft](+0.3%)である。これは、パルスが遠くまで進んでかなり減衰したきは、一定しきい値TOF測定を用いると精度が下がることを示す。テスト・パルスがより大きく減衰するとこの方法の精度は更に下がる。ディジタル回路では、このレベルの減衰は一般には起こらない。相互接続でのディジタル信号の最大減衰は一般に駆動信号の半分より小さい。かかる場合は、SD波による一定しきい値TOF測定の方が、反射パルスの推定出現時刻を用いる現在のTDR法より正確なはずである。
【0071】
次の例では第2のより線対は短絡で終端する。短絡での反射係数は−1で、これは負の反射になる。図27は305.6m[1002ft]で測定した電圧波形を示し、順方向に進む印加波と、第2のより線対の端で短絡終端から反射された波とを示す。図28は、反転した反射波と、例4の手続きに従って時間シフトして減衰させた印加波との結果を示す。このプロセスでは、全進行距離の測定値は611.2m[2004ft]、正確にはより線対の長さ305.6m[1002ft]の2倍である。図29A、29Bは例1で説明したTOFを推定する一定しきい値タイミング法を示す。この方法によると飛行時間は3,200nsであり、これから推定される全進行距離は612.4m[2008ft]である。これから推定されるより線対セクションの長さは306.2m[1004ft]で、誤差は0.6m[2ft](+0.2%)である。
【0072】
TDRプロセスへのSD波形の有用性は、例2で説明したプロセスと同様にして伝送路に与えた非SDパルスを用いて得られる実験的伝達関数を用いることにより大きくなる。このケーブルを用いる例として、T1ケーブルの単一の終端のないより線対に接続する任意の関数発生器で、実験的な電圧パルスを生成する。この波形を図30,31(破線)に示す。信号発生器から同じ波形を305.6m[1002ft]のより線対ではなく可変抵抗負荷に与えてもよい。抵抗器を調整して、その波形が任意の波形発生器からより線対に与えられる波形の形状および大きさに近似させる。図30,31(実線)参照。波形は正確には一致しない。なぜなら、抵抗器の周波数応答はより線対の応答と全く同じではないからである。負荷抵抗がより線対の特性インピーダンスZ0に等しい場合は、波形はケーブルに与えられた波形とよく一致して同様の周波数成分を有する。抵抗負荷で測定した信号と伝送路で測定した信号との違いは、与えられた信号に対する伝送路の応答から成り、伝送路のインピーダンス不一致点から反射された全ての波を含む。伝達関数は2つの信号の差と抵抗器だけの信号の高速フーリエ変換(FFT)の比、すなわち
Hest(jω)=FFT(V(ケーブルで測定した値)−V(負荷抵抗Z0で
測定した値))/FFT(V(負荷抵抗Z0で測定した値))
から計算する。図32に示すこの関数を用いて、SDパルスに対する反射伝送路応答を評価することができる。
【0073】
このプロセスのテストとして、前の2つの実験に用いたαに等しいαを有するSDパルスをシミュレートした。開放された終端のT1ケーブルについて決定された伝達関数(図32)を用いて期待応答を計算した(図33参照)。抵抗器とケーブルとが異なる高周波インピーダンス値を有するために、パルスを与えたときに小さなパルスが存在する。このパルスの影響は適当な時間窓で除いた。次に、シミュレートされた応答を用いて例4(図34)と例1(図35A、35B)の方法により開放された終端までの距離を推定した。スライドおよび減衰法の結果から得られたパルスの全往復距離の推定値は611.2m[2004ft]、すなわち開放された終端までの正確な距離305.6m[1002ft]の2倍であった。一定しきい値法から得られた推定進行距離611.8m[2006ft]、すなわち開放された終端までの推定距離305.9m[1003ft]の2倍(0.1%の誤差)、での飛行時間は3,196nsであった。
【0074】
実験では、これらの結果を得るのに実際のSD信号をより線対に与えたわけではない。伝送路に与えたテスト信号(図30)は、最大1,525m[5kft]までの範囲の長さの通信ケーブルをテストするための市販のTDR測定器から得られたタイプと同じであった。このテスト伝送路電圧から得た測定値を用いて実験的な伝送路伝達関数を得た。SD TOFと伝送路距離の推定値とは全て、非SD信号を用いて推定したこの実験的伝送路伝達関数を用いて伝送路に沿うSD伝播をシミュレートして、計算で得た。
【0075】
例6
高速送出し波形を用いた高速データ伝送による通信
SD波形は、データ伝送方式の基礎として適したいくつかの特性を有する。例えば、指数形状は均一なケーブル内を一定速度で伝播する間保持される。SD波形の減衰は指数波形パラメータαを変えることにより調整することができる。SD波形の伝播速度は指数波形パラメータαを変えることにより調整することができる。また、異なるαを持つSD波形は1次独立である。
【0076】
この例は、SD波形を用いてデータを伝送する方法の基礎として第1の特性を用いることを教示する。信号は、直列に接続された305.6m[1002ft]のT1ケーブル内の2つのより線対から成る伝送路に沿って611.2m[2004ft]伝送する。第2のより線対は100Ωの抵抗器で終端させる。データはそれぞれ別のαを有する4つのSD波形に符号化される。各波形は正または負のDで伝送することができるので、シンボル当たり3ビットで全部で8つの状態が得られる。1つのシンボルは3μs毎に送信されるので、データ・レートは1Mbpsである。当業者がこの開示の利点を認識するように、ここに含まれる教示からいくつかの他の通信方式を容易に導くことができる。
【0077】
シンボルは、2μsの切欠きSDリーディング・エッジ期間と、これに続く1μsの回復期間とで構成してもよい。この回復期間は、伝送路がゼロ電圧に戻るのに必要な時間を短縮するよう調整された可変幅の正弦半波補正パルスを含む。この回復期間と補正パルスの必要性を図36A、36B、37A、37Bに示す。図36Aは補正パルスを含まない伝送パルスを示し、図36Bは補正パルスを含まない受信パルスを示す。入力パルスのリーディング・エッジでの切欠きSD波形は簡単な傾斜信号で閉じられ、これは伝送路応答により波形が崩れる。伝播するパルスのSD部は変形しないが、傾斜の端部は3μsのシンボル期間を超えた領域に離れる。図37A、37Bはこのシンボル間の干渉を除くための補正パルスの影響を示す。各切欠きSD波形は異なる量の補正を必要とするので、第2のより線対の終端でのパルスを観察して、これに基づいて正弦半波パルスの幅を変えてもよい。
【0078】
図38はより線対入力に与えられる一連の4つのシンボルを示す。各シンボルは特有のαと特有のDとを有する。αは、2.2×106/s、3.3×106/s、4.4×106/s、5.5×106/sで、等間隔1.1×106/sだけ離れている。図9.3でこの4つの連続したシンボルに用いられているαの順序は4.4×106/s、2.2×106/s、3.3×106/s、5.5×106/sである。Dは、最大および最小のシンボル電圧をほぼ等しく維持できるように選択した。この例では、第4の波形は反転されている。611.2m[2004ft]の距離にある100Ωの終端で測定した信号を図39に示す。図40は図39の信号の各シンボル期間内の信号の自然対数を示す。整合フィルタの集合を用いれば個別のαを検出することができる。これらの波形の1次領域の最小自乗1次当てはめ(least square linear fit)の傾斜を下の表IIに示す。この例の決定レベルはαのステップ・サイズ1.1×106/sの半分の0.55×106/sである。全ての誤差はこのしきい値よりはるかに下である。
【表2】
【0079】
例7
高速送出し波形の直交1次結合を用いた高速データ伝送による通信
この例は、異なるαを有する持つSD波形が1次独立であるという第4のSD波形特性を用いることを示す。この特性はパルスの直交集合を生成するのに用いることができる。データは、パルスの振幅を変えることによりこれらのパルス上で符号化することができる。これらの振幅変調直交パルスを伝送路で同時に伝送する。受信機では、その直交性を利用して各パルスの振幅を計算する。この方式が機能するためには、SD波から得られる基本パルスが受信機で直交しなければならない。
【0080】
データを繰り返し伝送するには閉じたパルスを必要とする。例6に示すように、閉じた伝送パルスのリーディング・エッジのSD部はその形状を保持するが、パルスを閉じるのに用いた形状は伝播するに従って分散する。パルスの切欠きSDリーディング領域の減衰と伝播速度とはSDパラメータαの関数である。したがって、種々のα値を有するこれらのパルスの集合の直交性はパルスが進むに従って悪くなる。幸い、パルスは受信機だけで直交すればよい。1次独立の成分パルスから直交パルスの集合を生成するには種々の方法を用いることができる。かかる成分パルスに対する伝送路の影響は実験的に決めることができる。受信機で測定されるかかる伝送成分波形は1次独立である。かかる測定された1次独立の成分パルスの1次結合を用いて、受信機で直交するパルスの集合を生成する。直交化プロセスにより決定される定数を送信機に与え、これを用いて、受信機で直交する伝送パルスを生成する。この手続きの例を以下に示す。直交パルスを生成して伝送するプロセスを100Ωの抵抗で終端させる2,440m[8kft]の26AWGより線対の伝送路についてシミュレートする。
【0081】
例示的な直交化プロセスはSD波形の集合
を用いることから始まる。ただし、m=1...5、α0=1×104/s、Δα=1×105/s、t=0...7×10-6sである。7μs間隔の5つの波形を図41に示す。各波形はこの時間間隔で1次独立である。また、これらのSD波形は多項式構造を有する。すなわち、各波形は前の波形をe(Δα)t倍したものに等しい。これにより、多項式の簡単な再帰的アルゴリズム[4]を用いて、これらの1次独立波形の直交1次結合を作ることができる。この手続きから得られる5つの正規直交Yの集合を図42に示す。この場合、XとYとの関係は次の通りである。
集合Yは正規直交であって、内積は、
である。
【0082】
0および7μsでの鋭い波形遷移は高周波成分を有し、これは伝送中に分散してシンボル間の干渉を起こす。この影響はこの直交集合にsin(ωt)を掛けることにより減らすことができる。ただし、ω=π/7×10-6である。これはSD波形をX’に変える影響を有する。ただし、m=1...5について、
である。
SD波形X’はやはり1次独立であるが、これらの波形の前の1次結合
はもう直交しない。波形Y’を図43に示す。これらの波形はチャンネルを通して受信機に伝送してよい。
【0083】
受信機では、12μsシンボル期間を超えると波形は分散のトレーリング(trailing)の影響を示す(図44参照)。次のシンボル期間内へのパルスの広がりを除くことができないと、受信機でのこのシンボル間の干渉のために、送信機で符号化されたデータを読むことができなくなる。この干渉を除く簡単な方法は、テール(tail)を補正するZ=Y’+b・Cを有するパルスを追加することである。この例では、補償パルスC(t)はシンボル期間の開始の後1μs遅れた1サイクル、1−cos(πt/2.9×10-6)である(図45参照)。図46、47は、適当な大きさの補正パルスを各信号に加えた入力での波形と2,440m[8kft]での波形とを示す。受信機でのかかる補正成分パルスの継続時間はここでは望ましい12μsのシンボル期間より短い(図47参照)ので、かかるパルスの任意の1次結合は次のシンボルと干渉しない。
【0084】
正弦パルスを掛け、補正パルスを加え、チャンネルで伝送することは、全て最初の5つのパルスの直交性を悪くした。最初、図42のパルス間の角度は全て90°であった。現在は、図47のパルス間の角度は11°から74°の範囲である。ここでこれらの5つの1次独立の波形を結合して、主成分分解(PCD;principle component decomposition)[5]を用いて4つの直交波形の集合Sにする。グラム・シュミット(G−S)直交化法[6]を手続きのこのステップに用いてもよいが、PCD法の方が好ましい。G−S法は直交ベクトル集合を一度に1ベクトルずつ拡張する。成分が1次独立に近い場合は、これは条件の悪い変換マトリクスになる。PCD法が好ましい理由は、全ての成分により広がる全内積空間を考慮に入れるからである。このプロセスは全内積空間(entire inner-product space)の固有ベクトルを用いて変換マトリクスを生成する。また、変換マトリクスは固有値を順序づけるのに処理しやすい。この例では、変換マトリクスを切り欠くことにより4つの最大固有値を選択した。このプロセスにより変換マトリクス
を生じる。これは、5つの成分信号を1次結合することにより2,440m[8kft]で直交する4つの波形を生成する。これらの波形を図48(送信信号)と図49(受信直交信号)に示す。
【0085】
正規直交集合Sは受信機で直交し正規化される。このプロセスは、チャンネルの影響を示し、定義された成分の1次結合として送信機入力波形を伝送する前に容易に構築することができる。この集合Sを、直交パルス振幅変調のデータ伝送方式の基本機能として用いることができる。このプロセスを図50に示す。
4つの正規直交パルスSのそれぞれを5ビットで振幅変調することにより、データを符号化することができる。5ビットは32の状態を必要とする。各状態は各直交パルスSiの1つの振幅レベルaiに対応する。この例では、振幅レベルは±0.5、±1.5、...、±15.5であった。これらの4つの変調直交パルスを合計して、シンボルQ=a1S1+a2S2+a3S3+a4S4を生成する。
【0086】
シンボルを伝送し、受信機でパルスの直交性を用いて復号する。例えば、直交パルス1に与えられた信号は、シンボルQとパルス1信号S1との内積をとることにより見つけることができる。これを行うには、受信シンボルに既知の直交パルスを掛け、シンボル期間にわたって積分し、その結果を正規化する。
【0087】
図51は送信機の出力での3つの連続シンボルを示し、図52は受信機の入力での同じ3つのシンボルを示す。シンボルは、
4(パルス/シンボル)×5(ビット/パルス)/
(12×10-6s/シンボル)=1.67Mbps
のデータ・レートで、直交パルス当たり5ビットをランダムに選択して符号化した。
図53は、−140dBmの加法性白色ガウス・ノイズ(Additive White Gaussian Noise、AWGN)を含んで伝送された1秒当たりのデータ、すなわち1.67×106ビットで検出されたレベル内の誤差(a(期待)−a(検出))のヒストグラムである[7]。誤差分布の標準偏差は0.016と、0.018と、0.020と、0.018とで、最大検出誤差は0.074と,0.071と,0.083と、0.078とである。復号振幅決定レベルは±0.5である。
【0088】
例8
オンチップ・クロック回路
この例はディジタル回路内、特にオンチップ・クロック回路内でSD波形を用いることを教示する。オンチップ・クロック回路は高いクロック・レートを持つ伝送路と同様に作動する。
SD波形をクロック信号として用いたときの主な設計上の利点は、RC伝送路の遅れ
が、一般に用いられているステップ信号の場合のように長さについて2次ではなく、長さlについて1次であることである。RLC伝送路内のSD信号の場合も、長さについて1次遅れ
である。対照的に、従来の信号により励起されたRLC伝送路内の遅れは長さと共に指数的に増大する遅れを示す[8]。
【0089】
全てのタイプのクロック線についてSD信号遅れが長さの1次関数として増加するので、クロック線のレイアウトの設計プロセスが簡単になる。RC伝送路のように作動する損失の大きなクロック線から、RLC伝送路のように作動する損失の小さなクロック線まで、クロック線の作動の全範囲においてこの1次関係は保たれる。伝送路の長さとSDクロック信号の遅れとの間のこの簡単な1次関係は、精度を高めて設計計算要求を減らすソフトウエアCADツールを実現する基礎を与える。
【0090】
時間スキュー・クロック制御はシステム性能を制限する主要な問題である。この問題に対する解は、クロック信号を必要とするチップ上の種々の地点までの導体の長さを等しくすることを含む。信号経路の長さを等しくして信号遅れを等しくするために、いくつかの幾何学的パターンが一般に用いられる(Hなど)。これには、物理的にマスタ・チップ・クロック・ドライバの近くにあるピンの位置にクロック信号を送るトレースに沿う経路の長さと、マスタ・ドライバから最も長い距離にあるピンの位置までのクロック信号経路の長さとを等しくする必要がある。遅れを等しくするための小さな調整は、伝送路の幅を調整して伝送路パラメータを変更することにより単位長さ当たりの遅れを変更するか、またはクロック線内に組み込まれた遅れ固定ループの遅れを変えるなどの能動手段を用いることにより行われる。
【0091】
本発明は、切欠きSDクロック波形を用いてクロック・スキューを減らす方法および/または機器を提供する。本発明の利点は、単位長さ当たりの遅れを、クロック線ドライバの設計で選択された指数係数αで調整できることである。この単位長さ当たりの制御可能な遅れは、最初の特許出願[9]で30.6m[100ft]の同軸ケーブルについてされている。測定された最小同軸ケーブル遅れは1.8倍に増えた。
【0092】
指数係数αを変えて単位長さ当たりのクロック信号遅れを大幅に増やすことにより、クロック・ドライバの近くのピンまでの線を短くしてドライバとピンとの間の最小の物理的距離に一層近づけることができるし、また1つの経路の遅れをチップ上の最も長いクロック線の遅れに等しく保つことができる。クロック分配線が短くなるとチップ上で用いる物理的空間が小さくなり、全クロック線の静電容量が小さくなる。クロック線の静電容量がこのように小さくなると、所定のクロック周波数でチップが必要とする全電力消費が少なくなる。1つの実施の形態では、クロック発生器内で指数係数αを調整する機構を含めることにより、調整可能な遅れを持つSDクロック信号をSD波形ドライバが生成できるようにすることもできる。SDクロック信号の遅れをこのように調整することができるので、現在の技術で用いられている遅れ固定ループより遅れの調整範囲が大きくなる。
【0093】
本発明は伝達媒体を含んでもよい。本発明は時間領域反射率計のための方法および/または機器を含んでもよい。また、本発明は伝送路による高速通信のための方法および/または機器を含んでもよい。また、本発明は集積回路内の高速クロック信号のための方法および/または機器を含んでもよい。
【0094】
ここで用いる「或る」という用語は1つ以上と定義する。ここで用いる「複数」という用語は2つ以上と定義する。ここで用いる「別の」という用語は少なくとも2番目以上と定義する。ここで用いる「含む」および/または「有する」という用語は構成する(すなわち、オープンランゲージ)と定義する。ここで用いる「結合された」という用語は、必ずしも直接にではなくまた必ずしも機械的にではなく接続されたと定義する。ここで用いる「約」という用語は、少なくとも所定の値に近い(例えば、好ましくは10%以内、より好ましくは1%以内、最も好ましくは0.1%以内)と定義する。ここで用いる「実質的に」という用語は、少なくとも所定の状態に近い(例えば、好ましくは10%以内、より好ましくは1%以内、最も好ましくは0.1%以内)と定義する。ここで用いる「手段」という用語は、或る結果を達成するためのハードウエア、ファームウエアおよび/またはソフトウエアと定義する。ここで用いる「プログラム」または「コンピュータ・プログラム」という用語はコンピュータ・システム上で実行するよう設計された一連の命令と定義する。プログラムまたはコンピュータ・プログラムは、サブルーチン、関数、手続き、オブジェクト方法、オブジェクト実現、実行可能なアプリケーション、アプレット、サーブレット、ソース・コード、オブジェクト・コード、シェアド・ライブラリ/ダイナミック・ロード・ライブラリおよび/またはコンピュータ・システム上で実行するよう設計された命令の他のシーケンスを含んでよい。
【0095】
ここに開示された本発明の全ての実施の形態は、この開示を参照して過度の実験を行わずに実施して用いることができる。本発明はここに述べた理論的な概念に制限されるものではない。本発明者が考えた本発明を実行する最良のモードを開示したが、本発明の実施はこれに限られるものではない。したがって当業者が認識するように、本発明はここに特に述べたもの以外で実施してよい。
また、ここに述べた方法を構成するステップまたはステップのシーケンスに変更を行ってもよい。
【0096】
「のための手段」および/または「のためのステップ」という表現により所定のクレームに制限が明示されていない限り、クレームは手段と機能の制限を含むものではない。本発明の一般的な実施の形態は独立クレームおよびその同等クレームに示されている。本発明の特定の実施の形態は従属クレームおよびその同等クレームにより区別されている。
【0097】
参考文献
[1] A. J. Gruodis, C. S. Chang、「結合された損失のある伝送の特性表示とシミュレーション(Coupled Lossy Transmission Characterization and Simulation)」IBM J. Res. Develop. 25, 1981, pp. 25-41。
[2] E. G. Sauter、非線形光学(Nonlinear Optics), New York: John Wiley & Sons Inc., 1996, p. 127。
[3] G. P. Agrawal、非線形ファイバ・オプティックス(Nonlinear Fiber Optics), San Diego: Academic Press, 3rd ed., 2001, p. 127。
[4] Dunham Jackson、フーリエ級数および直交多項式(Fourier Series and Orthogonal Polynomials), Menasha: George Banta Company, Inc., 1957, pp. 156-157。
[5] Attila Szabo, Neil S. Ostlund、現代量子化学(Modern Quantum Chemistry)、Mineola: Dover Publications Inc., 1989, pp. 142-145。
[6] John G. Proakis、ディジタル通信(Digital Communications), Boston: WCB McGraw-Hill, 3rd ed., 1995, pp. 167-173。
[7] TI.417-2001、米国標準規格:ループ伝達システムのスペクトル管理、付録B:ループ情報(American National Standard-Spectrum Management for Loop Transmission Systems, Annex B: Loop Information), p.84。
[8] A. Deutsch et. al.「損失のある伝送路での高速信号伝播(High-Speed Signal Propagation on Lossy Transmission Lines), IBM J. Res. Develop. Vol. 34, No. 4, July 1990, p. 605。
[9] Robert H. Flake、制御可能な減衰および伝播速度を有する波形を伝送する方法(Methods For Transmitting a Waveform Having a Controllable Attenuation and Propagation Velocity), 米国特許出願SN 09/519,922号。
【特許請求の範囲】
【請求項1】
送信機を操作する方法において、
送信する入力データビットに基づいて、一組の振幅レベル{ai}を選択するステップと、
前記一組の振幅レベル{ai}を使用して一組の波形S={Si}の1次結合を生成することによって、シンボルを生成するステップであって、前記一組の波形Sは行列方程式S=BZによって一組の波形Z={Zi}に関係しており、行列Bは伝送媒体上で送信されるときに前記一組の波形Sが受信機で互いに直交するように選択され、前記一組の波形Zは行列式Z=Y’+bCによって一組の波形Y’={Y’i}と補償パルスCとに関係しており、bは係数ベクトルであり、前記一組の波形Y’は行列式Y’=AX’によって一組の波形X’={X’i}に関係しており、前記一組の波形X’は指数リーディングエッジを有するN波形の組X={Xi}に基づいており、前記一組の波形X’の各波形X’iは前記一組の波形Xの対応する波形Xiの窓処理されたものであり、Nは2以上の整数であり、前記行列Aは一組の波形Y=AXが正規直交となるように選択される、前記シンボルを生成するステップと、
前記シンボルを伝送媒体上で伝送するステップと
を備えることを特徴とする方法。
【請求項2】
請求項1記載の方法であって、前記一組の波形X’は、{W(t)X1(t),W(t)X2(t),…,W(t)XN(t)}に等しく、X1(t),X2(t),…,XN(t)は、指数リーディングエッジを有する前記波形であり、W(t)はウィンドウ・パルスであることを特徴とする方法。
【請求項3】
請求項1記載の方法であって、前記ウィンドウ・パルスは、正弦波パルスであることを特徴とする方法。
【請求項4】
請求項1記載の方法であって、更に、
前記補償パルスCを、前記伝送媒体を通して前記受信機に送信するステップと、
前記一組の波形{Y’i}を前記伝送媒体を通して前記受信機に送信するステップと、
前記受信機から前記係数ベクトルbと前記行列Bを受信することを特徴とする方法。
【請求項5】
請求項1記載の方法であって、前記波形{Zi}の継続時間がシンボル期間よりも短くなるように係数ベクトルbが選択されることを特徴とする方法。
【請求項6】
請求項1記載の方法であって、前記伝送媒体は、空気、光ファイバ、電気ケーブル、または水であることを特徴とする方法。
【請求項7】
請求項1記載の方法であって、前記伝送媒体は、低損失媒体であることを特徴とする方法。
【請求項8】
請求項1記載の方法であって、更に、
前記選択するステップ、前記生成するステップ、先記送信するステップを繰り返して、前記入力データビットのストリームを前記受信機に送信することを特徴とする方法。
【請求項9】
受信機を操作する方法であって、
伝送媒体からシンボルQを受信するステップであって、前記Qは一組の波形S={Si}の1次結合を有し、当該1次結合は行列方程式S=BZによって、一組の波形A={Zi}と関係しており、前記一組の波形Sは、行列方程式S=BZによって一組の波形A={Zi}に関係し、行列Bは送信機によって伝送媒体上へ送信されるときに前記一組の波形Sが受信機で互いに直交するように受信するように行列Bが選択され、前記一組の波形Zは、一組の波形Y’={Y’i}に関係すると共に行列方程式Z=Y’+bCによって補償パルスCとも関係し、bは係数ベクトルであり、前記一組の波形Y’は行列方程式Y’=AX’によって一組の波形X’={X’i}に関係しており、前記一組の波形Y’は行列方程式Y’=AX’によって一組の波形X’={X’i}に関係しており、前記一組の波形X’は、指数リーディングエッジを有するN個の波形の組X={Xi}に基づいており、前記一組の波形X’の各波形X’iは、前記一組の波形Xの対応する波形Xiの窓処理されたものであり、Nは2以上の整数であり、前記行列Aは一組の波形Y=AXが正規直交となるように選択される、前記受信するステップと、
前記シンボルQと前記一組の波形Sとの内積を計算するステップと、
前記内積を正規化して、正規化した振幅の値を決定するステップと、
前記正規化した振幅値から情報ビットを復号するステップと、
を備えたことを特徴とする方法。
【請求項10】
請求項9記載の方法であって、前記一組の波形{X’i}は、{W(t)X1(t),W(t)X2(t),…,W(t)XN(t)}に等しく、X1(t),X2(t),…,XN(t)は、指数リーディングエッジを有するN個の波形であることを特徴とする方法。
【請求項11】
請求項10記載の方法であって、W(t)は正弦波のウィンドウ・パルスであることを特徴とする方法。
【請求項12】
請求項9記載の方法であって、更に、
前記送信機から前記伝送媒体を経由して前記補償パルスCを受信するステップと、
前記送信機から前記伝送媒体を経由して前記一組の波形{Y’i}を受信するステップと、
前記波形{Zi}の継続時間がシンボル期間よりも短かくなるように、前記係数ベクトルbを選択するステップと、
前記一組の波形Sが前記送信機により前記伝送媒体上で送信されるときに前記受信機で互いに直交するように前記行列Bを選択するステップと、
前記係数ベクトルbと前記行列Bとを前記送信機に送信するステップと、
を備えることを特徴とする方法。
【請求項13】
請求項9記載の方法であって、前記伝送媒体は、空気、光ファイバ、電気ケーブルまたは水であることを特徴とする方法。
【請求項14】
請求項9記載の方法であって、更に、
前記シンボルQを受信するステップと、前記内積を計算するステップと、前記正規化するステップと、前記情報ビットを復号するステップとを繰り返して、送信された情報のストリームを回復することを特徴とする方法。
【請求項15】
送信機を操作する方法であって、
正の値の有限な組から値αを選択するステップであると共に{+,−}の組から符号を選択するステップ(a)とであって、前記値を選択するステップであると共に前記符号を選択するステップ(a)とは、データビットのストリームからデータの現在の組に基づいている、前記ステップ(a)と、
伝送媒体上にシンボルを伝送するステップ(b)であって、前記シンボルは前記符号*D*exp(at)のリーディングエッジを有しており、Dは振幅値であるステップ(b)と、
を備えることを特徴とする方法。
【請求項16】
請求項15記載の方法であって、前記ステップ(a)と前記ステップ(b)と複数回繰り返して、前記データビットのストリームから一連の組を送信することを特徴とする方法。
【請求項17】
請求項15記載の方法であって、前記送信されたシンボルは、正弦半波を補償するパルスを含むことを特徴とする方法。
【請求項18】
請求項15記載の方法であって、前記有限の組の中の正の値は等差であることを特徴とする方法。
【請求項19】
受信機を操作する方法であって、
(a)伝送媒体上の前記シンボルの送信に応じて、前記伝送媒体からのシンボルを受信するステップ(a)であって、前記送信されたシンボルは、S*D*exp(at)の形式のリーディングエッジを有しており、Dは振幅値であり、Sは{+,−}の組み合わせに属しており、値αは正の値の有限の組に属している、前記ステップ(a)と、
(b)前記受信したシンボルから前記値Sと前記値αとを検出するステップ(b)と、
(c)前記検出した値Sと前記検出した値αとをデータビットの組にマッピングするステップ(c)とを備えることを特徴とする方法。
【請求項20】
請求項19記載の方法であって、
前記ステップ(a)、前記ステップ(b)、前記ステップ(c)を複数回繰り返して、データビットのストリームを回復することを特徴とする方法。
【請求項21】
請求項19記載の方法であって、前記ステップ(b)は、整合フィルタの組を使用して実行されることを特徴とする方法。
【請求項22】
入力パルスを伝送媒体に与えるステップであって、前記入力パルスのリーディングエッジが指数の形ではない、前記与えるステップと、
前記入力パルスを記録するステップと、
前記入力パルスを与えることに応じて前記伝送媒体により生じる応答パルスを記録するステップと、
前記記録された入力パルスと前記記録された応答パルスとに基づいて前記伝送媒体の伝達関数を計算するステップと、
前記伝達関数とシミュレートされた入力信号とを使用して、シミュレートされた応答信号を計算するステップであって、前記シミュレートされた入力信号はDeαtの形でリーディングエッジを有し、Dは非ゼロ定数であり、αは正の定数であり、tは時間である、前記計算するステップと、
前記シミュレートされた入力信号と前記シミュレートされた応答信号との間での飛行時間を計算するステップと、
を備えることを特徴とする方法。
【請求項23】
請求項22記載の方法であって、前記入力パルスは前記伝送媒体の第1の位置に与えられ、前記応答パルスは前記伝送媒体の第2の位置で記録されており、
前記方法は、更に、前記伝送媒体内を伝播する既知の速度と飛行時間に基づき、前記第1の位置と前記第2の位置との間の距離を計算するステップを備えることを特徴とする方法。
【請求項24】
請求項22記載の方法であって、前記応答パルスは、前記伝送媒体のインピーダンスが不連続の位置で反射することによって生じており、
前記方法は、更に、前記伝送媒体内を伝播する既知の速度と飛行時間とに基づき、前記インピーダンスの不連続に対する前記伝送媒体内の距離を計算することを特徴とする方法。
【請求項25】
請求項22記載の方法であって、更に、
前記伝送媒体に関連する既知の長さと前記飛行時間に基づいて、伝播速度vSDを計算するステップを備えることを特徴とする方法。
【請求項26】
請求項25記載の方法であって、更に、
式ASD=α/vSDに基づいて、空間減衰係数ASDを計算するステップを備えることを特徴とする方法。
【請求項27】
請求項25記載の方法であって、
前記シミュレートされた応答信号の計算と前記飛行時間の計算とを含む一組の操作を繰り返すステップであって、当該繰り返すステップのそれぞれにおいては、それぞれ異なる正の定数αの値を用いる、前記繰り返すステップと、
前記既知の長さと相応する飛行時間とに基づいて、前記繰り返すステップのそれぞれにおける伝播速度を求めるステップとを更に備える方法。
【請求項28】
請求項22記載の方法であって、更に、
前記伝達関数を計算するステップは、前記入力パルスがフーリエ変換されたもので前記応答パルスがフーリエ変換されたものを割るステップを含むことを特徴とする方法。
【請求項29】
伝送媒体の第1の端部に入力パルスを与えるステップと、
前記伝送媒体の前記第1の端部に生じる第1の信号を記録するステップであって、前記第1の信号は、前記入力パルスと反射パルスとの組み合わせを含み、前記反射信号は前記入力パルスを与えるステップに応じて前記伝送媒体に生じる、前記記録するステップと、
前記入力パルスを可変抵抗負荷に与えて、当該可変抵抗負荷で生じる第2の信号を記録するステップを繰り返し、
前記記録された第2の信号が前記記録された第1の信号に近似するまで前記可変抵抗負荷の抵抗値を変化させるステップと、
前記記録された第1の信号と、当該記録された第1の信号に近似している前記記録された第2の信号とに基づいて前記伝送媒体の伝達関数を計算するステップと、
前記伝達関数とシミュレートされた入力信号とを使用して、シミュレートされた応答信号を計算するステップであって、前記シミュレートされた入力信号は、前記Deαtのリーディングエッジを有し、Dは正の定数であり、αは非ゼロ定数であり、tは時間である、前記シミュレートされた応答信号を計算するステップと、
前記シミュレートされた入力信号と前記シミュレートされた応答信号との間の飛行時間を計算するステップと、
を備えることを特徴とする方法。
【請求項30】
請求項29記載の方法において、前記反射パルスは、前記伝送媒体の欠陥からの反射であることを特徴とする方法。
【請求項1】
送信機を操作する方法において、
送信する入力データビットに基づいて、一組の振幅レベル{ai}を選択するステップと、
前記一組の振幅レベル{ai}を使用して一組の波形S={Si}の1次結合を生成することによって、シンボルを生成するステップであって、前記一組の波形Sは行列方程式S=BZによって一組の波形Z={Zi}に関係しており、行列Bは伝送媒体上で送信されるときに前記一組の波形Sが受信機で互いに直交するように選択され、前記一組の波形Zは行列式Z=Y’+bCによって一組の波形Y’={Y’i}と補償パルスCとに関係しており、bは係数ベクトルであり、前記一組の波形Y’は行列式Y’=AX’によって一組の波形X’={X’i}に関係しており、前記一組の波形X’は指数リーディングエッジを有するN波形の組X={Xi}に基づいており、前記一組の波形X’の各波形X’iは前記一組の波形Xの対応する波形Xiの窓処理されたものであり、Nは2以上の整数であり、前記行列Aは一組の波形Y=AXが正規直交となるように選択される、前記シンボルを生成するステップと、
前記シンボルを伝送媒体上で伝送するステップと
を備えることを特徴とする方法。
【請求項2】
請求項1記載の方法であって、前記一組の波形X’は、{W(t)X1(t),W(t)X2(t),…,W(t)XN(t)}に等しく、X1(t),X2(t),…,XN(t)は、指数リーディングエッジを有する前記波形であり、W(t)はウィンドウ・パルスであることを特徴とする方法。
【請求項3】
請求項1記載の方法であって、前記ウィンドウ・パルスは、正弦波パルスであることを特徴とする方法。
【請求項4】
請求項1記載の方法であって、更に、
前記補償パルスCを、前記伝送媒体を通して前記受信機に送信するステップと、
前記一組の波形{Y’i}を前記伝送媒体を通して前記受信機に送信するステップと、
前記受信機から前記係数ベクトルbと前記行列Bを受信することを特徴とする方法。
【請求項5】
請求項1記載の方法であって、前記波形{Zi}の継続時間がシンボル期間よりも短くなるように係数ベクトルbが選択されることを特徴とする方法。
【請求項6】
請求項1記載の方法であって、前記伝送媒体は、空気、光ファイバ、電気ケーブル、または水であることを特徴とする方法。
【請求項7】
請求項1記載の方法であって、前記伝送媒体は、低損失媒体であることを特徴とする方法。
【請求項8】
請求項1記載の方法であって、更に、
前記選択するステップ、前記生成するステップ、先記送信するステップを繰り返して、前記入力データビットのストリームを前記受信機に送信することを特徴とする方法。
【請求項9】
受信機を操作する方法であって、
伝送媒体からシンボルQを受信するステップであって、前記Qは一組の波形S={Si}の1次結合を有し、当該1次結合は行列方程式S=BZによって、一組の波形A={Zi}と関係しており、前記一組の波形Sは、行列方程式S=BZによって一組の波形A={Zi}に関係し、行列Bは送信機によって伝送媒体上へ送信されるときに前記一組の波形Sが受信機で互いに直交するように受信するように行列Bが選択され、前記一組の波形Zは、一組の波形Y’={Y’i}に関係すると共に行列方程式Z=Y’+bCによって補償パルスCとも関係し、bは係数ベクトルであり、前記一組の波形Y’は行列方程式Y’=AX’によって一組の波形X’={X’i}に関係しており、前記一組の波形Y’は行列方程式Y’=AX’によって一組の波形X’={X’i}に関係しており、前記一組の波形X’は、指数リーディングエッジを有するN個の波形の組X={Xi}に基づいており、前記一組の波形X’の各波形X’iは、前記一組の波形Xの対応する波形Xiの窓処理されたものであり、Nは2以上の整数であり、前記行列Aは一組の波形Y=AXが正規直交となるように選択される、前記受信するステップと、
前記シンボルQと前記一組の波形Sとの内積を計算するステップと、
前記内積を正規化して、正規化した振幅の値を決定するステップと、
前記正規化した振幅値から情報ビットを復号するステップと、
を備えたことを特徴とする方法。
【請求項10】
請求項9記載の方法であって、前記一組の波形{X’i}は、{W(t)X1(t),W(t)X2(t),…,W(t)XN(t)}に等しく、X1(t),X2(t),…,XN(t)は、指数リーディングエッジを有するN個の波形であることを特徴とする方法。
【請求項11】
請求項10記載の方法であって、W(t)は正弦波のウィンドウ・パルスであることを特徴とする方法。
【請求項12】
請求項9記載の方法であって、更に、
前記送信機から前記伝送媒体を経由して前記補償パルスCを受信するステップと、
前記送信機から前記伝送媒体を経由して前記一組の波形{Y’i}を受信するステップと、
前記波形{Zi}の継続時間がシンボル期間よりも短かくなるように、前記係数ベクトルbを選択するステップと、
前記一組の波形Sが前記送信機により前記伝送媒体上で送信されるときに前記受信機で互いに直交するように前記行列Bを選択するステップと、
前記係数ベクトルbと前記行列Bとを前記送信機に送信するステップと、
を備えることを特徴とする方法。
【請求項13】
請求項9記載の方法であって、前記伝送媒体は、空気、光ファイバ、電気ケーブルまたは水であることを特徴とする方法。
【請求項14】
請求項9記載の方法であって、更に、
前記シンボルQを受信するステップと、前記内積を計算するステップと、前記正規化するステップと、前記情報ビットを復号するステップとを繰り返して、送信された情報のストリームを回復することを特徴とする方法。
【請求項15】
送信機を操作する方法であって、
正の値の有限な組から値αを選択するステップであると共に{+,−}の組から符号を選択するステップ(a)とであって、前記値を選択するステップであると共に前記符号を選択するステップ(a)とは、データビットのストリームからデータの現在の組に基づいている、前記ステップ(a)と、
伝送媒体上にシンボルを伝送するステップ(b)であって、前記シンボルは前記符号*D*exp(at)のリーディングエッジを有しており、Dは振幅値であるステップ(b)と、
を備えることを特徴とする方法。
【請求項16】
請求項15記載の方法であって、前記ステップ(a)と前記ステップ(b)と複数回繰り返して、前記データビットのストリームから一連の組を送信することを特徴とする方法。
【請求項17】
請求項15記載の方法であって、前記送信されたシンボルは、正弦半波を補償するパルスを含むことを特徴とする方法。
【請求項18】
請求項15記載の方法であって、前記有限の組の中の正の値は等差であることを特徴とする方法。
【請求項19】
受信機を操作する方法であって、
(a)伝送媒体上の前記シンボルの送信に応じて、前記伝送媒体からのシンボルを受信するステップ(a)であって、前記送信されたシンボルは、S*D*exp(at)の形式のリーディングエッジを有しており、Dは振幅値であり、Sは{+,−}の組み合わせに属しており、値αは正の値の有限の組に属している、前記ステップ(a)と、
(b)前記受信したシンボルから前記値Sと前記値αとを検出するステップ(b)と、
(c)前記検出した値Sと前記検出した値αとをデータビットの組にマッピングするステップ(c)とを備えることを特徴とする方法。
【請求項20】
請求項19記載の方法であって、
前記ステップ(a)、前記ステップ(b)、前記ステップ(c)を複数回繰り返して、データビットのストリームを回復することを特徴とする方法。
【請求項21】
請求項19記載の方法であって、前記ステップ(b)は、整合フィルタの組を使用して実行されることを特徴とする方法。
【請求項22】
入力パルスを伝送媒体に与えるステップであって、前記入力パルスのリーディングエッジが指数の形ではない、前記与えるステップと、
前記入力パルスを記録するステップと、
前記入力パルスを与えることに応じて前記伝送媒体により生じる応答パルスを記録するステップと、
前記記録された入力パルスと前記記録された応答パルスとに基づいて前記伝送媒体の伝達関数を計算するステップと、
前記伝達関数とシミュレートされた入力信号とを使用して、シミュレートされた応答信号を計算するステップであって、前記シミュレートされた入力信号はDeαtの形でリーディングエッジを有し、Dは非ゼロ定数であり、αは正の定数であり、tは時間である、前記計算するステップと、
前記シミュレートされた入力信号と前記シミュレートされた応答信号との間での飛行時間を計算するステップと、
を備えることを特徴とする方法。
【請求項23】
請求項22記載の方法であって、前記入力パルスは前記伝送媒体の第1の位置に与えられ、前記応答パルスは前記伝送媒体の第2の位置で記録されており、
前記方法は、更に、前記伝送媒体内を伝播する既知の速度と飛行時間に基づき、前記第1の位置と前記第2の位置との間の距離を計算するステップを備えることを特徴とする方法。
【請求項24】
請求項22記載の方法であって、前記応答パルスは、前記伝送媒体のインピーダンスが不連続の位置で反射することによって生じており、
前記方法は、更に、前記伝送媒体内を伝播する既知の速度と飛行時間とに基づき、前記インピーダンスの不連続に対する前記伝送媒体内の距離を計算することを特徴とする方法。
【請求項25】
請求項22記載の方法であって、更に、
前記伝送媒体に関連する既知の長さと前記飛行時間に基づいて、伝播速度vSDを計算するステップを備えることを特徴とする方法。
【請求項26】
請求項25記載の方法であって、更に、
式ASD=α/vSDに基づいて、空間減衰係数ASDを計算するステップを備えることを特徴とする方法。
【請求項27】
請求項25記載の方法であって、
前記シミュレートされた応答信号の計算と前記飛行時間の計算とを含む一組の操作を繰り返すステップであって、当該繰り返すステップのそれぞれにおいては、それぞれ異なる正の定数αの値を用いる、前記繰り返すステップと、
前記既知の長さと相応する飛行時間とに基づいて、前記繰り返すステップのそれぞれにおける伝播速度を求めるステップとを更に備える方法。
【請求項28】
請求項22記載の方法であって、更に、
前記伝達関数を計算するステップは、前記入力パルスがフーリエ変換されたもので前記応答パルスがフーリエ変換されたものを割るステップを含むことを特徴とする方法。
【請求項29】
伝送媒体の第1の端部に入力パルスを与えるステップと、
前記伝送媒体の前記第1の端部に生じる第1の信号を記録するステップであって、前記第1の信号は、前記入力パルスと反射パルスとの組み合わせを含み、前記反射信号は前記入力パルスを与えるステップに応じて前記伝送媒体に生じる、前記記録するステップと、
前記入力パルスを可変抵抗負荷に与えて、当該可変抵抗負荷で生じる第2の信号を記録するステップを繰り返し、
前記記録された第2の信号が前記記録された第1の信号に近似するまで前記可変抵抗負荷の抵抗値を変化させるステップと、
前記記録された第1の信号と、当該記録された第1の信号に近似している前記記録された第2の信号とに基づいて前記伝送媒体の伝達関数を計算するステップと、
前記伝達関数とシミュレートされた入力信号とを使用して、シミュレートされた応答信号を計算するステップであって、前記シミュレートされた入力信号は、前記Deαtのリーディングエッジを有し、Dは正の定数であり、αは非ゼロ定数であり、tは時間である、前記シミュレートされた応答信号を計算するステップと、
前記シミュレートされた入力信号と前記シミュレートされた応答信号との間の飛行時間を計算するステップと、
を備えることを特徴とする方法。
【請求項30】
請求項29記載の方法において、前記反射パルスは、前記伝送媒体の欠陥からの反射であることを特徴とする方法。
【図1A】

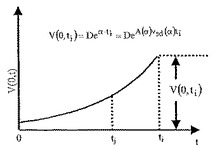
【図1B】
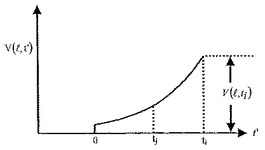
【図2】

【図3】
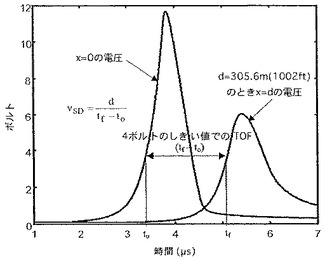
【図4A】
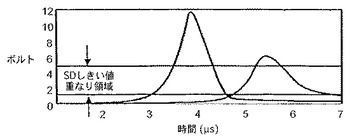
【図4B】

【図5A】
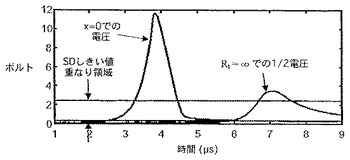
【図5B】
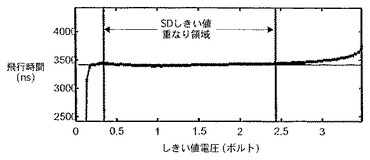
【図6A】
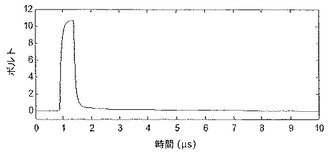
【図6B】
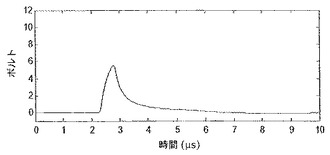
【図7A】
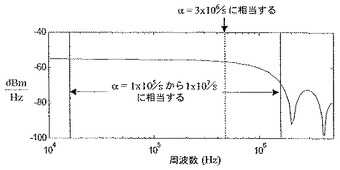
【図7B】
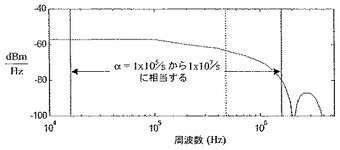
【図8】
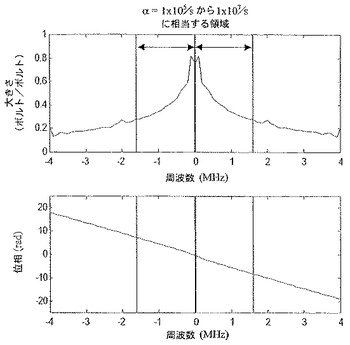
【図9】
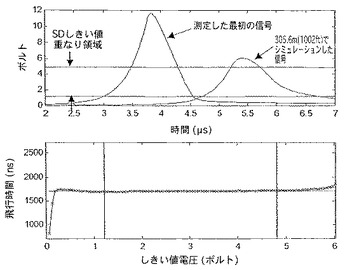
【図10】
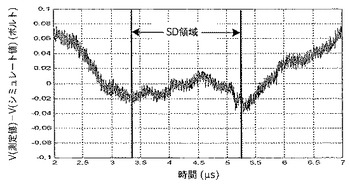
【図11】
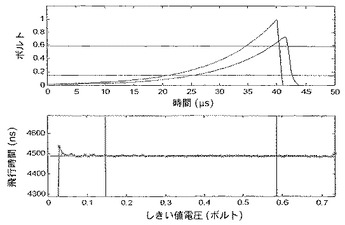
【図12】
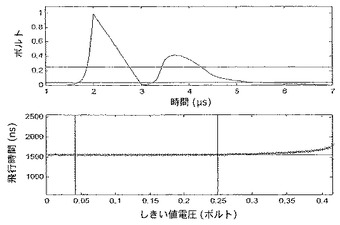
【図13A】
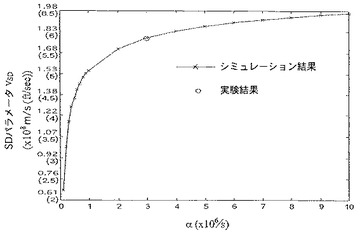
【図13B】
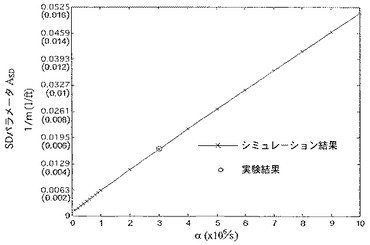
【図14】
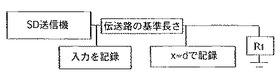
【図15A】
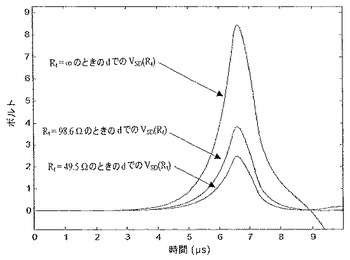
【図15B】
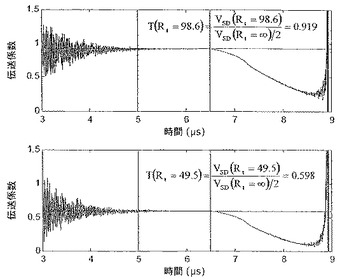
【図16】
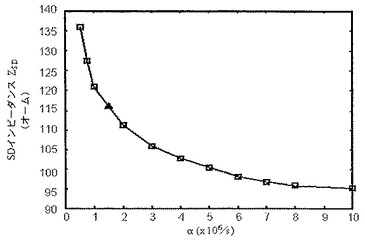
【図17】

【図18】
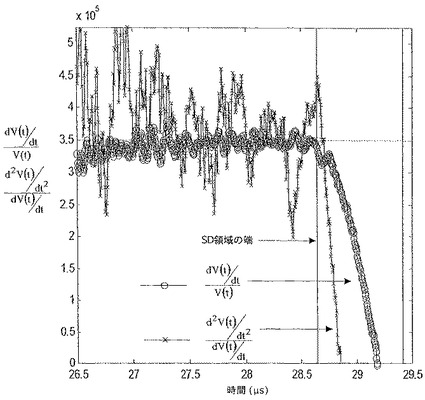
【図19】
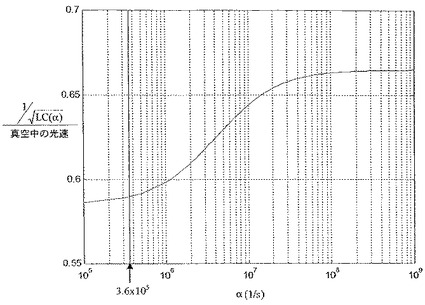
【図20】
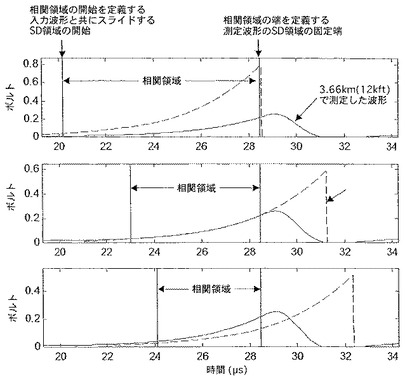
【図21】
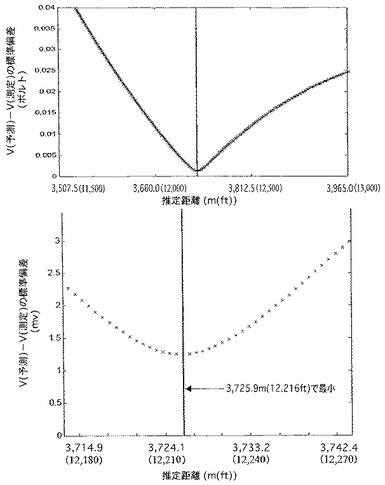
【図22A】
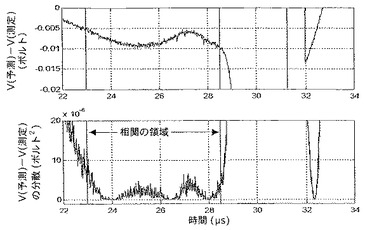
【図22B】
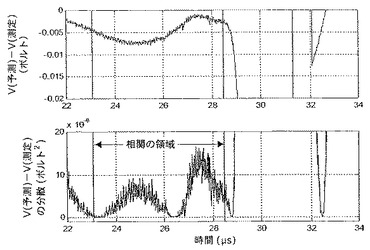
【図23】

【図24】
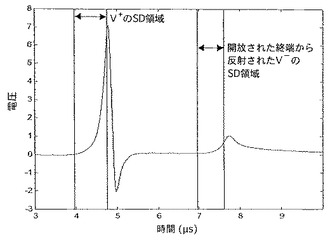
【図25】
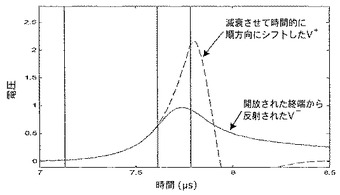
【図26A】
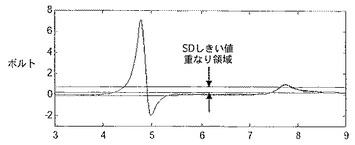
【図26B】
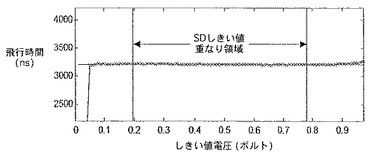
【図27】
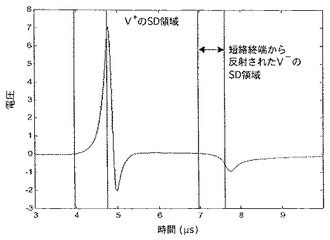
【図28】
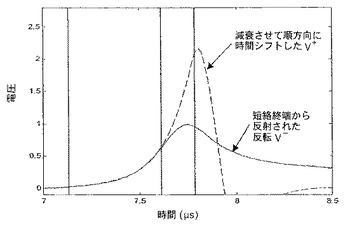
【図29A】
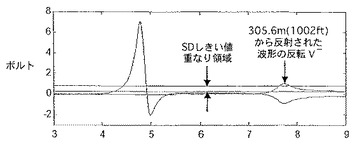
【図29B】
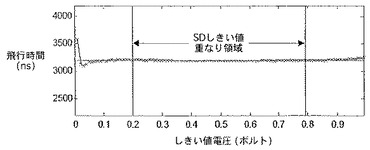
【図30】
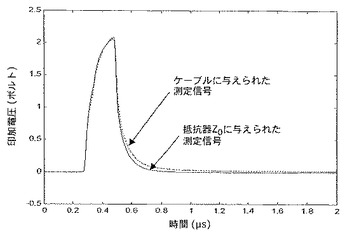
【図31】
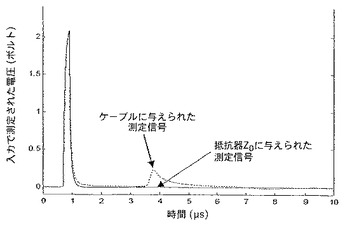
【図32】
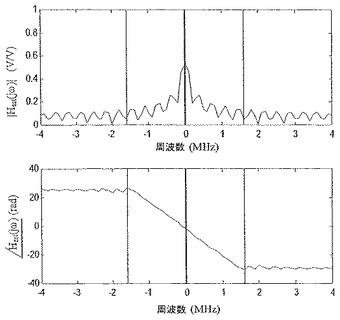
【図33】
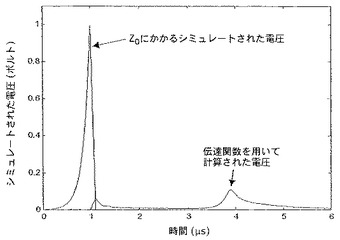
【図34】
【図35A】
【図35B】
【図36A】
【図36B】
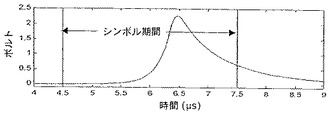
【図37A】
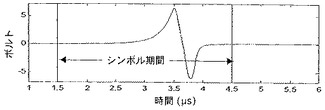
【図37B】
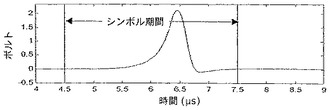
【図38】
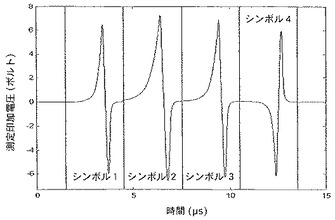
【図39】
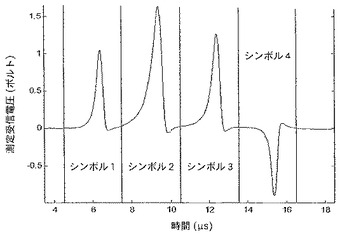
【図40】
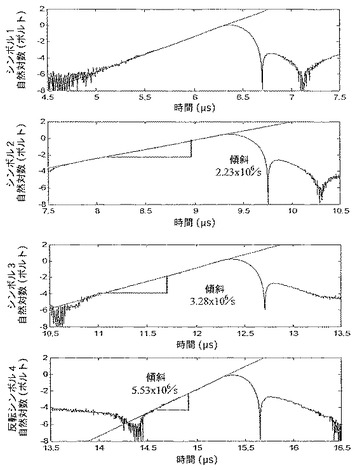
【図41】
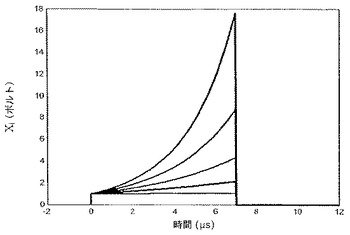
【図42】
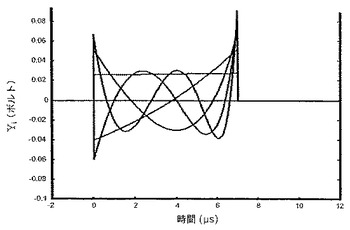
【図43】
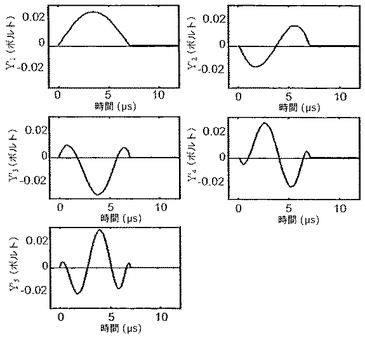
【図44】
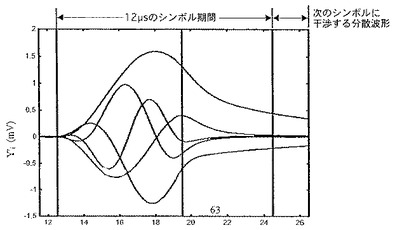
【図45】
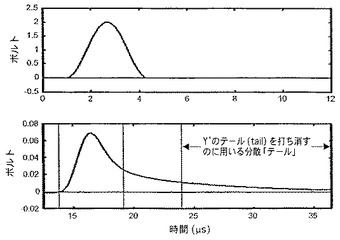
【図46】
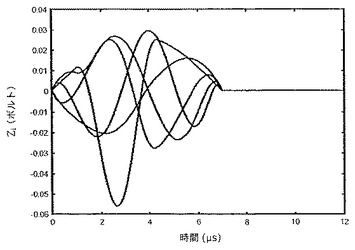
【図47】
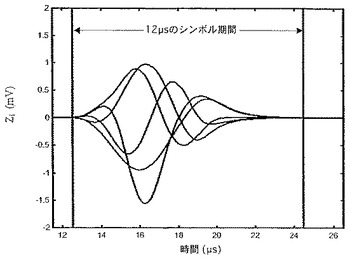
【図48】
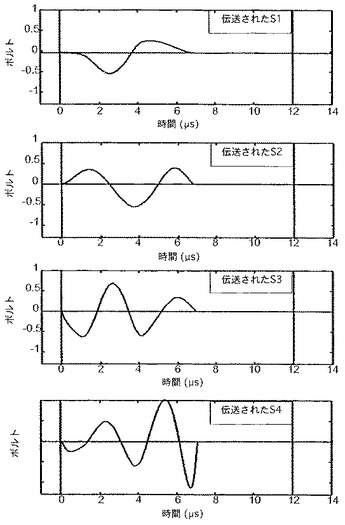
【図49】
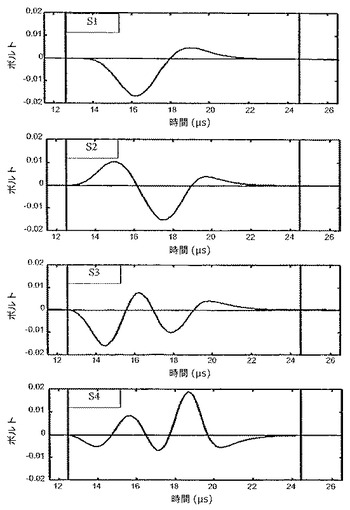
【図50】
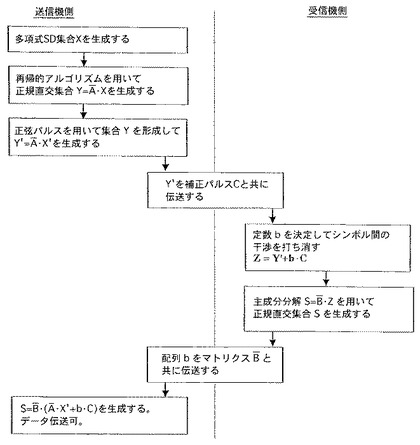
【図51】

【図52】
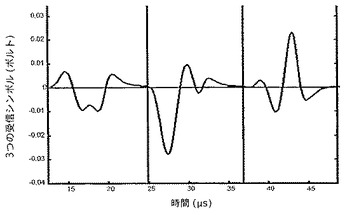
【図53】
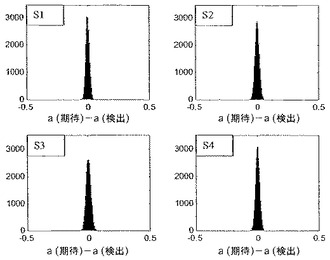
【図1B】
【図2】
【図3】
【図4A】
【図4B】
【図5A】
【図5B】
【図6A】
【図6B】
【図7A】
【図7B】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13A】
【図13B】
【図14】
【図15A】
【図15B】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22A】
【図22B】
【図23】
【図24】
【図25】
【図26A】
【図26B】
【図27】
【図28】
【図29A】
【図29B】
【図30】
【図31】
【図32】
【図33】
【図34】
【図35A】
【図35B】
【図36A】
【図36B】
【図37A】
【図37B】
【図38】
【図39】
【図40】
【図41】
【図42】
【図43】
【図44】
【図45】
【図46】
【図47】
【図48】
【図49】
【図50】
【図51】
【図52】
【図53】
【公開番号】特開2012−156994(P2012−156994A)
【公開日】平成24年8月16日(2012.8.16)
【国際特許分類】
【出願番号】特願2011−288883(P2011−288883)
【出願日】平成23年12月28日(2011.12.28)
【分割の表示】特願2004−531090(P2004−531090)の分割
【原出願日】平成15年8月19日(2003.8.19)
【出願人】(500039463)ボード・オブ・リージエンツ,ザ・ユニバーシテイ・オブ・テキサス・システム (115)
【Fターム(参考)】
【公開日】平成24年8月16日(2012.8.16)
【国際特許分類】
【出願日】平成23年12月28日(2011.12.28)
【分割の表示】特願2004−531090(P2004−531090)の分割
【原出願日】平成15年8月19日(2003.8.19)
【出願人】(500039463)ボード・オブ・リージエンツ,ザ・ユニバーシテイ・オブ・テキサス・システム (115)
【Fターム(参考)】
[ Back to top ]