
制御方法、プログラム、記録媒体、及び、制御装置
【課題】複数の固有振動数が生じる場合において、運ばれる物体に移動装置の振動に伴う揺れを全く生じさせないことによって安定して確実且つ迅速に物体を運ぶことができる制御方法等を提供する。
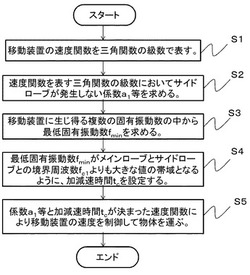
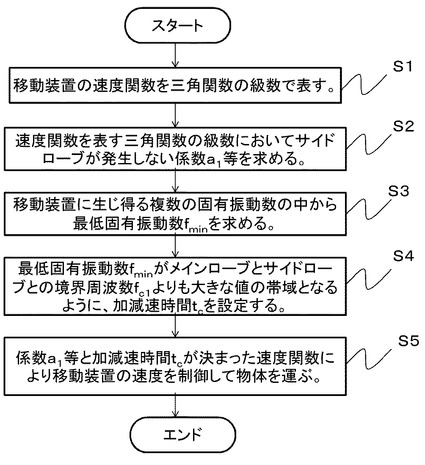
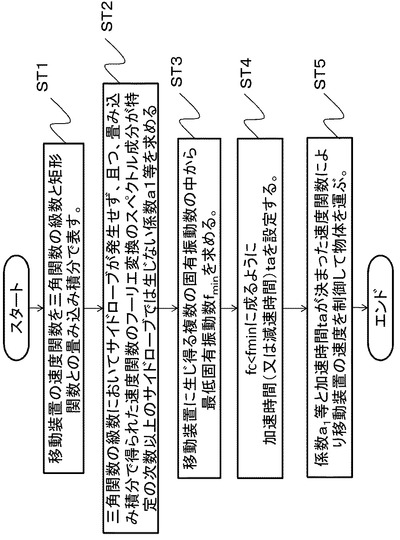
【解決手段】物体を運ぶ移動装置の速度関数を三角関数の級数で表し(S1)、三角関数の級数においてサイドローブが発生しない係数a1等を求め(S2)、物体の重量と移動装置における重心位置とから生じる複数の固有振動数を求めて最低固有振動数fminを求め(S3)、最低固有振動数fminがメインローブとサイドローブとの境界周波数fc1よりも大きな値の帯域となるように加減速時間tcを設定し(S4)、係数a1等と加減速時間tcが決まって得られた速度関数により物体を運ぶ移動装置の速度を制御して物体を運ぶ(S5)。
【解決手段】物体を運ぶ移動装置の速度関数を三角関数の級数で表し(S1)、三角関数の級数においてサイドローブが発生しない係数a1等を求め(S2)、物体の重量と移動装置における重心位置とから生じる複数の固有振動数を求めて最低固有振動数fminを求め(S3)、最低固有振動数fminがメインローブとサイドローブとの境界周波数fc1よりも大きな値の帯域となるように加減速時間tcを設定し(S4)、係数a1等と加減速時間tcが決まって得られた速度関数により物体を運ぶ移動装置の速度を制御して物体を運ぶ(S5)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、制御方法、プログラム、記録媒体、及び、制御装置に関し、特に物体を運ぶ移動装置の速度を制御する制御方法等に関する。
【背景技術】
【0002】
移動装置の一例としての制御対象機械を目標位置へ移動させて停止させる際に、その停止時の慣性力による制御対象機械の振動を抑制するように工夫する技術として、特許文献1に記載のものがある。
【0003】
特許文献1では、具体的には、先端に重量物(運ばれる物体)が取り付けられた長尺のアームを移動させて目標位置に停止させるような場合に、停止時に発生してしまう振動を抑制するために、速度指令値に補正量を加算し、又は、トルク若しくは推力指令値に補正量を加算し、加算された値によって制御対象機械の駆動制御を行うことにしている。
【0004】
また、他の技術として、本願発明者によって、移動装置の一例であるスタッカクレーンの制振制御については、特許文献2に記載の技術も提案されている。以下、まず、スタッカクレーンについて簡単に説明し、特許文献2の技術も簡単に説明する。
【0005】
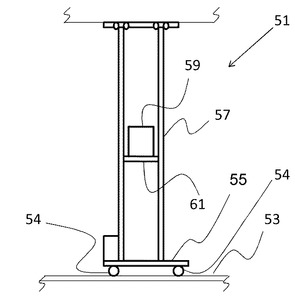
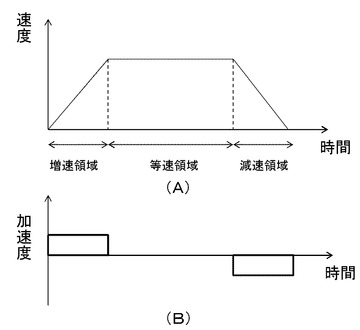
図18はスタッカクレーンを説明する図である。スタッカクレーン51は、図19(B)に示される加速度パターンを有する図19(A)に示すような増速領域、等速領域及び減速領域を有する速度パターンで走行レール53上を車輪54により往復走行可能な走行台車55と、これに立設された昇降マスト57と、搬送物59を搭載し昇降マスト57に沿って昇降する昇降台61とを備える。
【0006】
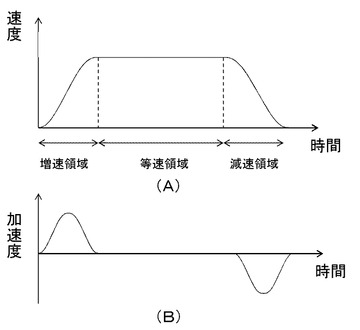
図20は特許文献2の技術を説明するための図である。特許文献2の技術では、昇降台61及び搬送物59の重量と昇降台61の高さ位置に基づいてスタッカクレーンの固有振動周期が予め求められる。そして、この2倍以上の整数倍に増速領域及び減速領域の時間が設定され、増速領域及び減速領域の各加速度パターンが、図20(B)に示すような左右対称の正の値をとる増加及び正の値をとる減少加速度と負の値をとる増加及び負の値をとる減少加速度とし、図20(A)に示す速度パターンで、搬送物59を搭載した昇降台61の増速領域及び減速領域の終了後に発生する振動の振幅をフィードフォワード的に制御して小さくしている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特許第3750633号公報
【特許文献2】特開2010−30728号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、特許文献1及び2記載の技術のいずれにおいても、移動装置にひとつの固有振動数があることを前提に、その振動をあくまでも抑制するという手段を採用しており、固有振動数が違った場合,振動抑制の効果は無い。そのため、加速時及び減速時に振動が起きてしまうことには変わりなく、さらには、走行中の振動が発生してしまうことも起こり得る。
【0009】
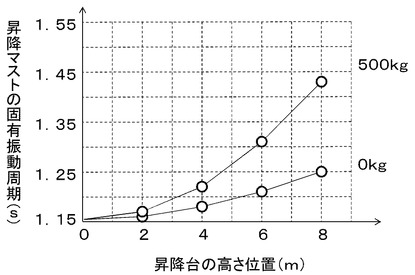
この点については、特許文献2でも指摘している。すなわち、特許文献2の技術であっても、上記のように固有振動周期を予め求めているが、固有振動周期は、図21にも示されるように、昇降台及び搬送物の重量と昇降台の高さ位置により異なる周期をとる。そのため、例えば、昇降台が昇降しながら走行台車が停止する場合には、昇降マストの固有振動周期が変化する結果、予め求めた固有振動周期とは異なる固有振動周期との関係で、走行台車の停止タイミングで、昇降マストの撓みがゼロ且つ昇降マストの移動速度がゼロということはなく、昇降マストの振動が小さいながらも発生してしまうという問題があった。
【0010】
このような現象が、移動する物体の重量又は/及び重心位置(高さ)が変化することにより固有振動周期(固有振動数)の変化が生じてしまう場合には、同様に、振動が生じてしまうという共通の問題として起っていた。具体的には、スタッカクレーンにおいては、上記したように同一の重量の搬送物を移動中に異なる高さ位置に変化させながら移動する場合のほか、同一の高さであっても搬送毎に同じ重量の搬送物を搬送するとは限られないので、搬送物の重量が変化する場合にも起こり得る。
【0011】
さらに、移動装置としての搬送台車での搬送においても、常に搭載された荷の重量と重心位置(高さ)が同じで搬送が行われるのではなく、搭載された荷の重量と重心位置(高さ)が搬送毎に変化し得ることから、荷を揺らしてしまうという現象が生じていた。さらに、固有振動周期(固有振動数)が異なる複数の物品や機構を同時に移動装置により移動させて停止させる場合においても、固有振動周期(固有振動数)が複数在ることから、振動が発生してしまっていた。
【0012】
さらに言えば、上記した搬送台車と同様に、コンベア、天井クレーン、エレベータなどにおいても、人や物を運ぶ際に、加速時及び減速時になどに移動装置であるコンベア等が人や物を揺らしてしまうという問題もあるが、これも移動装置であるコンベア等を全体として捉えた場合に、複数の固有振動周期(固有振動数)が生じてしまう結果が原因と考えられる。
【0013】
ゆえに、本発明は、物体を運ぶ移動装置の速度を制御するにあたり、物体の重量又は/及び重心位置(高さ)が変わることにより固有振動数の変化が生じる場合において、加速時減速時に移動装置に振動を生じさせず走行中に振動を生じさせない制振制御を行うことにより、運ばれる物体に移動装置の加減速に伴う揺れを全く生じさせないことによって安定して確実且つ迅速に物体を運ぶことができる制御方法等を提供することを目的とする。
【課題を解決するための手段】
【0014】
請求項1に係る発明は、物体を運ぶ移動装置の速度を制御する制御方法であって、前記移動装置が、前記物体の重量又は/及び前記移動装置における前記物体の重心位置が変化することによって固有振動数が変化するものであって前記変化する固有振動数の中に最小固有振動数fminが存在するものであり、前記速度を示す速度関数v(t)は、加速時間、減速時間又は加減速時間において変化するものであるとともに、当該速度関数v(t)をフーリエ変換すると特定の周波数fc以上でそのスペクトル成分が0となるものであり、前記特定の周波数fcが前記最小固有振動数fminよりも小さい値となる前記加速時間、前記減速時間又は前記加減速時間を設定する時間設定ステップと、前記設定された時間において、時刻tを変化させて、前記移動装置の時刻tにおける速度を前記速度関数v(t)で制御する速度制御ステップとを含むものである。
【0015】
これにより、物体の重量又は/及び移動装置における物体の重心位置が変化することによって固有振動数が変化するものであっても、速度関数v(t)がフーリエ変換すると特定の周波数fc以上でそのスペクトル成分が0となる関数であり、特定の周波数fcが最小固有振動数fminよりも小さい値となる加速時間、減速時間又は加減速時間の設定を行うことにより、設定された時間において、時刻tを変化させて、移動装置の時刻tにおける速度を速度関数v(t)で制御すれば、変化しうる範囲のどの固有振動数においてもフーリエ変換したスペクトル成分が0であることから移動装置及び物体を振動させずに移動できる制振制御を行える。
【0016】
請求項2に係る発明は、請求項1において、前記速度関数v(t)が、フーリエ変換して得られるスペクトル分布にサイドローブを生じないものであり又は特定の次数以上のサイドローブを生じないものであり、前記時間設定ステップにおいて、前記加減速時間又は前記加速時間若しくは前記減速時間の設定を行うことにより、前記スペクトル分布において、前記最小固有振動数fminよりも値が小さな周波数帯域に、メインローブとサイドローブとの間の境界周波数を生じさせ、又は、成分があるサイドローブと成分がないサイドローブとの間の境界周波数を生じさせるようにして、前記境界周波数を前記特定の周波数fcとするものである。
【0017】
これにより、フーリエ変換して得られるスペクトル分布にはサイドローブ自体を生じない又は特定の次数以上のサイドローブを生じないことから、そして、スペクトル分布におけるメインローブとサイドローブとの間の境界周波数を最小固有振動数fminの値よりも小さな値の周波数帯域に生じさせ又は成分があるサイドローブと成分がないサイドローブとの間の境界周波数を最小固有振動数fminの値よりも小さな値の周波数帯域に生じさせ、その境界周波数を特定の周波数fcとすることから、複数の固有振動数のいずれにおいてもフーリエ変化したスペクトル成分を0とでき、移動装置及び物体を全く振動させないという制振制御を行える。
【0018】
請求項3に係る発明は、請求項2において、前記移動装置が、前記物体を第1の地点から第2の地点へ運ぶものであり、前記速度関数v(t)が、前記第1の地点における移動開始時と前記第2の地点における移動終了時とにおける速度が0をとり前記第1の地点と前記第2の地点との間の中央位置での速度が最高速度をとり、且つ、前記第1の地点から前記中央位置までと前記中央位置から前記第2の地点までとが対称性がある三角関数の級数で表されるものであって、当該三角関数の級数で表される速度関数v(t)をフーリエ変換して得られるスペクトル分布は、サイドローブが生じないものであり、前記時間設定ステップにおいて、前記加減速時間の設定を行うことにより、前記最小固有振動数fminよりも値が小さな周波数帯域に前記スペクトル分布のメインローブとサイドローブとの間の境界周波数を前記特定の周波数fcとして生じさせるものである。
【0019】
これにより、中央位置で最高速度をとり第1の地点から第2の地点に物体を運ぶ場合における速度が三角関数の級数で表される場合において、請求項2に係る発明と同様な作用が得られる。
【0020】
請求項4に係る発明は、請求項3において、前記速度関数v(t)が式(eq1)であり、式(eq1)において、前記第1の地点から前記第2の地点までの移動距離はdであり、前記加減速時間がtcであり、係数a1及びa2はa1+a2=1であって式(eq1)による前記速度関数v(t)をフーリエ変換してできるスペクトル分布のサイドローブが生じない係数値とされるものである。
【0021】
これにより、2倍の高調波までの近似式による三角関数の級数によって表される速度関数v(t)の場合において、請求項3と同様な作用が得られる。
【0022】
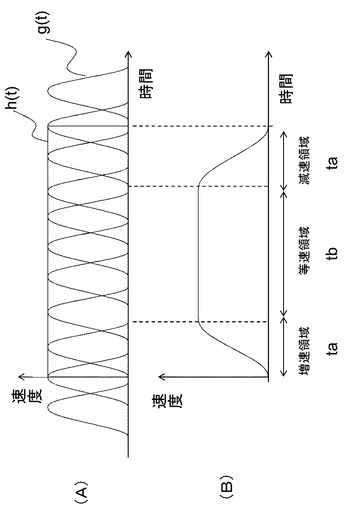
請求項5に係る発明は、請求項2において、前記移動装置が、前記物体を第1の地点から第2及び第3の地点を経由して第4の地点へ運ぶものであり、前記第1の地点から前記第2の地点までは加速し、前記第2の地点から前記第3の地点までは一定の速度vmaxをとり、前記第3の地点から前記第4の地点までは減速するものであり、前記速度関数v(t)が、三角関数の級数で表される関数g(t)と矩形関数h(t)との畳み込み積分で表されて一定速度部分があり、前記第1の地点における移動開始時と前記第4の地点における移動終了時とにおける速度が0をとり前記第1の地点から前記第2の地点までと前記第3の地点から前記第4の地点までとが対称性がある速度変化の関数で表されるものであり、前記関数g(t)をフーリエ変換してできるスペクトル分布は、サイドローブが生じないものであり、前記速度関数v(t)をフーリエ変換してできるスペクトル分布は、特定の次数以上のサイドローブが生じないものであり、前記時間設定ステップにおいて、前記加速時間又は前記減速時間の設定を行うことにより、前記速度関数v(t)をフーリエ変換してできるスペクトル分布において前記最小固有振動数fminよりも小さな値の周波数帯域に成分が生じたサイドローブと成分が生じていないサイドローブとの間の境界周波数を前記特定の周波数fcとして生じさせるものである。
【0023】
これにより、vmaxという一定速度で運ぶ状態がある場合の速度関数v(t)が、フーリエ変換のスペクトル成分にはサイドローブが生じない三角関数の級数で表される関数g(t)と矩形関数h(t)との畳み込み積分で表される場合において、請求項2に係る発明と同様な作用が得られる。
【0024】
請求項6に係る発明は、請求項5において、前記速度関数v(t)が、加速時間0≦t≦taでは式(eq2)の関数で表され、ta≦t≦ta+tbではvmaxで一定であり、ta+tb≦t≦2ta+tbでは式(eq3)の関数で表されて加速とは対称形で減速するものであり、式(eq2)、式(eq3)及び式(eq4)の係数a1及びa2はa1+a2=1であって式(eq4)式のg(t)をフーリエ変換してできるスペクトル分布のサイドローブが生じない係数値とすることにより、式(eq4)のg(t)と矩形関数h(t)との畳み込み積分で表される式(eq2)及び式(eq3)で特定される速度関数v(t)をフーリエ変換してできるスペクトル分布は、特定の次数以上のサイドローブが生じないものである。
【0025】
これにより、速度関数v(t)を求めるために矩形関数h(t)との畳み込み積分に用いられる関数g(t)が2倍の高調波までの近似式による三角関数の級数によって表される場合において、畳み込み積分のフーリエ変換が各関数のフーリエ変換したものの積で表されるということを利用して、請求項5と同様な作用が得られる。
【0026】
請求項7に係る発明では、請求項4又は6記載の制御方法において、前記係数a1が、ブラックマン窓関数の値以上である。
【0027】
請求項8に係る発明は、請求項1から7のいずれかに記載の制御方法をコンピュータに実行させるためのプログラムである。
【0028】
請求項9に係る発明は、請求項8記載のプログラムを記録したコンピュータが読み取り可能な記録媒体である。
【0029】
請求項10に係る発明は、物体を運ぶ移動装置の速度を制御する制御装置であって、前記移動装置が、前記物体の重量又は/及び前記移動装置における前記物体の重心位置が変化することによって固有振動数が変化するものであって前記変化する固有振動数の中に最小固有振動数fminが存在するものであり、前記速度を示す速度関数v(t)は、加速時間、減速時間、又は、加減速時間において変化するものであるとともに、当該速度関数v(t)のフーリエ変換が特定の周波数fc以上でそのスペクトル成分が0となるものであり、前記特定の周波数fcが前記最小固有振動数fminよりも小さい値となる前記加速時間、前記減速時間、又は、前記加減速時間を設定する時間設定手段と、前記設定された時間において、時刻tを変化させて、前記移動装置の時刻tにおける速度を速度関数v(t)で制御する速度制御手段とを備える。
【0030】
【数1】

【発明の効果】
【0031】
以上のように、本発明によれば、物体の重量又は/及び移動装置における物体の重心位置が変化することによって固有振動数が変化するものであっても、フーリエ変換によるスペクトル分布で示されるように、変化しうる範囲のどの固有振動数においてもスペクトル成分が0であることから、移動装置及び物体を振動させずに移動する制振制御を行える。これにより、例えばスタッカクレーンの停止時の振動を生じさせず、また移動中も振動を生じさせず、運ばれる物体に対して移動装置の振動に伴う揺れを全く生じさせないことによって、安定して確実且つ迅速に物体を運ぶことができる。
【図面の簡単な説明】
【0032】
【図1】物体を運ぶ移動装置の速度が中央で最速となり一定速度部分がない速度曲線で表される場合において、移動距離d=1000[mm]、加減速時間tc=1.0[s]、係数a1=4/7、係数a2=2/7、係数a3=1/7とした場合の(2)式で表される速度曲線のグラフ(A)とそのFFT(高速フーリエ変換)解析した結果のグラフ(B)を示す図である。
【図2】表1で得られた結果の速度曲線のグラフ(A)とそのFFTの結果のグラフ(B)を示す図であって、表1のNo2の場合を示した図である。
【図3】表1で得られた結果の速度曲線のグラフ(A)とそのFFTの結果のグラフ(B)を示す図であって、表1のNo3の場合を示した図である。
【図4】表1で得られた結果の速度曲線のグラフ(A)とそのFFTの結果のグラフ(B)を示す図であって、表1のNo4の場合を示した図である。
【図5】表1で得られた結果の速度曲線のグラフ(A)とそのFFTの結果のグラフ(B)を示す図であって、表1のNo5の場合を示した図である。
【図6】表1で得られた結果の速度曲線のグラフ(A)とそのFFTの結果のグラフ(B)を示す図であって、表1のNo7の場合を示した図である。
【図7】本発明の実施の形態に係るロバスト制振制御方法の一例の処理について示した図である。
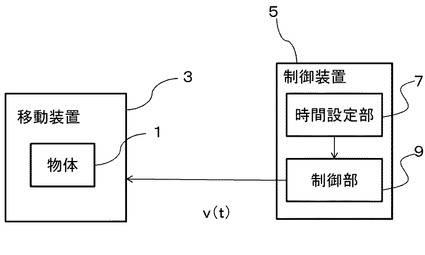
【図8】本発明の実施の形態に係るロバスト制振制御装置の一例の構成について示した概略ブロック図である。
【図9】振動試験機を想定したシミュレーションの計算結果を示す図であって、速度曲線のグラフ(A)とそのFFTの結果のグラフ(B)を示す図である。
【図10】畳み込み積分を説明するための図である。
【図11】h(t)として採用した矩形関数のグラフ(A)とそのFFTの結果のグラフ(B)を示した図である。
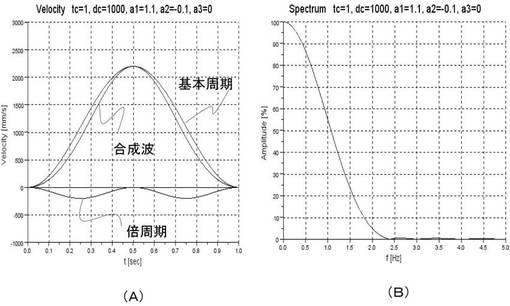
【図12】g(t)として採用した高域がない(ここではサイドローブがない)(12)式の関数であってa1=1.2、a2=−0.2とした場合の三角関数の級数で表された関数のグラフ(A)とそのFFTの結果のグラフ(B)を示した図である。
【図13】図11で示された矩形関数h(t)と図12で示された関数g(t)との畳み込み積分で得られる一定速度(vmax)がある速度曲線を表す速度関数v(t)のグラフ(A)とそのFFTの結果のグラフ(B)を示した図である。
【図14】本発明の実施の形態に係るロバスト制振制御方法の他の例の処理について示した図である。
【図15】振動試験機を想定したシミュレーションの計算結果を示す図であって、振動試験機には固有振動数がfm1=1.54Hz、fm2=1.97Hz、fm3=2.29Hzの板ばねが搭載されており、1200mmを動かす場合のta=1.5secで最高速度が500[mm/s]の台形速度関数の場合を示す速度曲線のグラフ(A)とそのFFT解析した結果のグラフ(B)を示す図である。
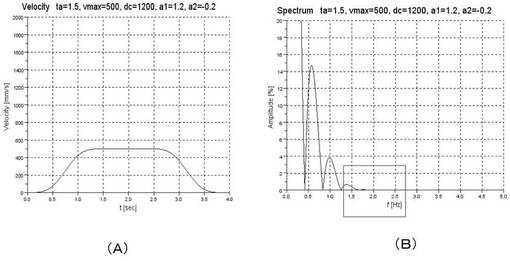
【図16】振動試験機を想定したシミュレーションの計算結果を示す図であって、振動試験機には固有振動数がfm1=1.54Hz、fm2=1.97Hz、fm3=2.29Hzの板ばねが搭載されおり、1200mmを振動させずに一定速を挟んだ速度曲線で動かす場合の(21)〜(23)式のa1=1.2、a2=−0.2をとり、ta=1.5secで最高速度が500[mm/s]の速度曲線で動かした場合を示す速度曲線のグラフ(A)とそのFFT解析した結果のグラフ(B)を示す図である。
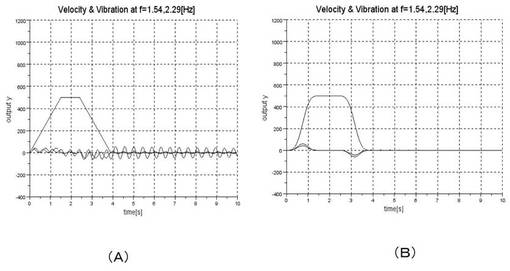
【図17】図15に示した関数の過渡応答のグラフ(A)と図16に示した関数の過度応答のグラフ(B)を示した図であって、想定された振動試験機で動かしてみた場合の振動の様子をシミュレーションしたものを表した図である。
【図18】スタッカクレーンを説明する図である。
【図19】図18のスタッカクレーンの速度パターン(A)と加速度パターン(B)を示す図である。
【図20】特許文献2の技術を説明するための図である。
【図21】固有振動周期が昇降台及び搬送物の重量と昇降台の高さ位置により異なる周期をとることを示す図である。
【発明を実施するための形態】
【0033】
[本願に係る発明へのアプローチ]
以下、本願に係る発明へのアプローチを説明するために「振動と重ね合わせの原理とフーリエ変換との関係」から説明する。
【0034】
構造物(移動装置)の振動とは、ニュートン力学でいう「慣性力」と「弾性力」とが互いに作用し合って、その「運動エネルギー」と「弾性エネルギー」とが交互に入れ替わる現象と捉えることができる。外力によって機械という構造物には「たわみ」という弾性力が発生する。そして、複数の外力が構造物に作用するとき、そのたわみは、1つずつの外力が同じ構造物に作用した場合のたわみを足し合わせたものと等しくなる。これを重ね合わせの原理と言い、数学では、「線形システム」であるという。外力という時間関数をフーリエ級数で表すと個々の周期の外力がたわみを発生させると考えることができ、機械という構造物の固有振動数と同じ周期の外力がかかった場合、「共振振動」が発生する。これが「振動が発生した」ということを意味する。
【0035】
外力を非周期関数とした場合、フーリエ変換によってその周波数成分の分布である「スペクトル」を計算できる。機械という構造物の固有振動数と同じ周波数のスペクトルの大きさ(振幅)が大きい場合に、共振振動が発生してしまう。逆に、スペクトルに構造物の固有振動数成分がない場合には、振動は発生しない。
【0036】
フーリエ変換の性質として、微分・積分によってスペクトル分布は変化しない。そのため、外力が重量(質量)に加える加速度であることから、その加速度関数のスペクトルに固有振動数の成分が生じなければ、振動は発生しないことになる。このことは、加速度関数を積分した速度関数のスペクトル分布に固有振動数の成分が含まれていなければ、振動が発生しないことを意味することでもある。
【0037】
また、複数の非周期関数の足し算は、個々のスペクトルの足し算であり、下記に示す三角関数の級数で表す速度関数は、足し算によって高い成分をキャンセルして無くすことができることを表すことになる。
【0038】
このように、本願の発明者は、上記のような考えのもと、従来までのアプローチとは異なる独創的なアプローチからロバスト制振制御を考えた。そして、物体を運ぶ移動装置という機械の構造物が複数の固有振動数を生じてしまう場合において、その最低固有振動数よりも高域の帯域ではスペクトル成分が発生しないようにすることにより、振動を発生させないということに着眼し、以下に説明するロバスト制振制御は見出された。
【0039】
[一定速度部分がない速度関数を表すための三角級数速度関数]
まず、速度関数を三角関数の級数で表す三角級数速度関数について説明する。ここで、速度関数の境界条件は、動作開始と終了時に速度0、且つ、動作中央位置で最大速度をとるものとする。また、速度曲線は加速と減速の速度変化が対称形とする。三角関数の和が用いられて関数が表現されるとすれば、個々の三角関数成分も境界条件を満たす必要がある。
【0040】
0から始まって0で終わる区間を対称に変化する三角関数候補としては、1−cos2θ=2sin2θがある。この三角関数はθ=0,πで値が0、θ=π/2で最大値となるので、上記境界条件を満たす。そのn倍周期の成分を足し合わせる場合もこの境界条件は守られるので、加速と減速の曲線の形を変化させることができる。
【0041】
下記(1)式を用いることにより3倍高調波までの級数で近似してみる場合を説明する。(1)式は、(2)式のように式変形できる。
【0042】
【数2】
【0043】
最大速度vmaxと移動距離d(=d1+d2+d3)を求めると、下記の関係式が得られる。(4)〜(6)式により、d=d1+d2+d3=d(a1+a2+a3)となり、a1+a2+a3=1が得られる。ここで、tcは、移動距離dを移動する時間である。
【0044】
【数3】
【0045】
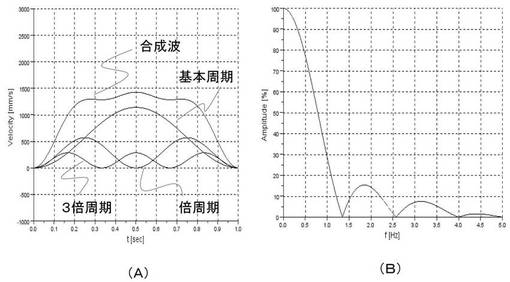
このような関係が分かった上で、d=1000[mm]、tc=1.0[s]、a1=4/7、a2=2/7、a3=1/7とした場合の速度曲線のグラフとそのFFT(高速フーリエ変換)解析した結果のグラフは、図1のように得られる。なお、図1(A)は速度曲線のグラフを表し、横軸は時間t[sec]、縦軸は速度velocity[mm/s]を表す。図1(B)は図1(A)の速度曲線をFFT解析した結果のグラフであり、横軸は周波数f[Hz]、縦軸は振幅amplitude[%]を表す。図1(A)において、4つの曲線が示されており、4つの曲線は、それぞれ、基本周期、倍周期、3倍周期とこれらを足した合成波を表している。
【0046】
[三角級数速度関数の係数]
次に、三角級数速度関数をフーリエ変換した時に、希望する周波数帯域の成分が最小になるように級数の係数を決定することを検討する。なお、級数は2倍高調波までの近似式とすると、(7)式と(8)式が得られる。但し、a1+a2=1という関係がある。
【0047】
【数4】
【0048】
FFTによる数値解析計算を行い、サイドローブが最小になる係数を見つける。具体的には、d=1000[mm]、tc=1.0[s]、a1とa2を0.1刻みで図1のようなグラフを描いてみた。その結果は、下記表1に示す通りである。表1において、fc1はメインローブとサイドローブとの境界周波数、fc2は第1サイドローブと第2サイドローブとの境界周波数、A1は第1サイドローブの最高振幅、vmaxは最高速度である。
【0049】
【表1】
【0050】
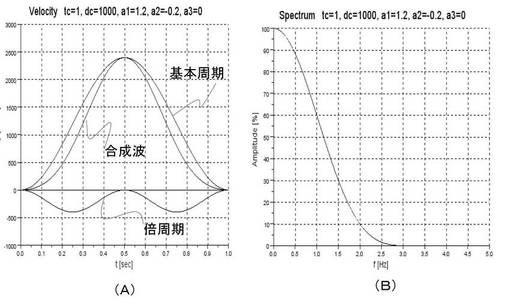
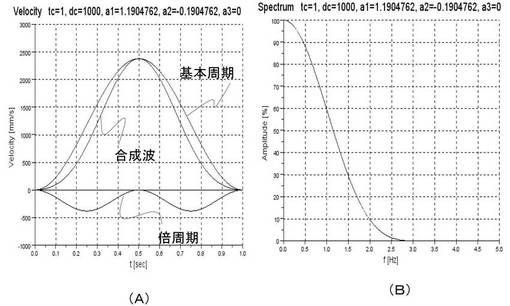
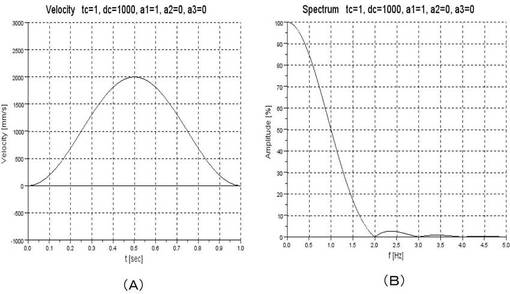
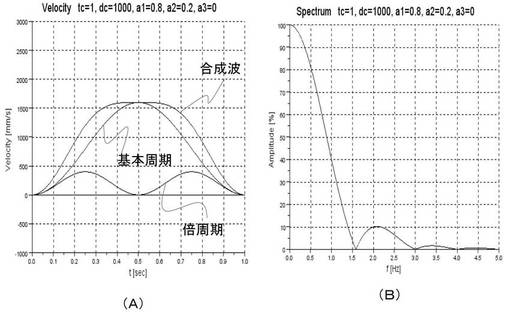
上記表1で得られた計算結果の速度曲線のグラフとそのFFTの結果のグラフについて、No2の場合を図2に示し、No3の場合を図3に示し、No4の場合を図4に示し、No5の場合を図5にし、No7の場合を図6に示す。なお、図2(A)、図3(A)、図4(A)、図5(A)及び図6(A)は速度曲線のグラフを表し、横軸は時間t[sec]、縦軸は速度velocity[mm/s]を表す。図2(B)、図3(B)、図4(B)、図5(B)及び図6(B)は図2(A)、図3(A)、図4(A)、図5(A)及び図6(A)の各速度曲線をFFT解析した結果のグラフであり、横軸は周波数f[Hz]、縦軸は振幅amplitude[%]を表す。図2(A)、図3(A)、図4(A)及び図6(A)において3つの曲線が示されており、3つの曲線は、それぞれ、基本周期、倍周期とこれらを足した合成波を表している。
【0051】
このような結果より、サイドローブがなくなるのは、a1がBlackman窓関数の場合の値(0.5/0.42≒1.19)以上の場合である。a2については、a1+a2=1の関係があるため、サイドローブがなくなるのは、Blackman窓関数の場合の値(−0.08/0.42≒−0.19)以下の場合である。そのため、ロバスト制振制御の速度関数としては、a1がBlackman窓関数の場合の値以上(a2がBlackman窓関数の場合の値以下)とすればよい。その上で、Blackman窓関数の場合から外れるほどfc1に示される境界周波数が大きくなっていき最高速度が大きくなっていくので、複数の固有振動数が生じている場合の最低固有振動数fminがfc1よりも大きな値となる上の帯域となるためには、a1は、Blackman窓関数の場合の値とすれば最もバランスが良く好ましいが、1.2のような値も最高速度が大きすぎず且つfc1も大きすぎないという点からすれば好ましい。
【0052】
[方法と装置]
以上の原理をもとに、本発明の実施の形態に係るロバスト制振制御方法の一例の処理について図7に示し、本発明の実施の形態に係るロバスト制振制御装置の一例の構成について概略ブロックで図8に示す。
【0053】
図7において、ステップS1では、物体を運ぶ移動装置の速度関数v(t)を三角関数の級数で表す。ステップS2では、ステップS1で表した三角関数の級数においてサイドローブが発生しない係数a1等を求める。このステップS1及びS2は制御の基本設計段階で行われる。ステップS3では、実際の装置が出来て、事前に動かすことにより、又は、シミュレーションにより、物体の重量と移動装置における重心位置とから生じる複数の固有振動数を求めて、その中から最低固有振動数fminを求める。ステップS1〜S3までの処理は設備が出来ると値を決めることができる処理となっている。ステップS4では、ステップS3で求めた最低固有振動数fminがメインローブとサイドローブとの境界周波数fc1よりも大きな値の帯域となるように(言い換えると、ステップS3で求めた最低固有振動数fminよりも値が小さな周波数帯域にメインローブとサイドローブとの境界周波数fc1が生じるように)、加減速時間tcを設定する。ステップS5では、係数a1等と加減速時間tcが決まって得られた速度関数v(t)により物体1を運ぶ移動装置3の速度を制御して物体を運ぶ。図8のロバスト制振制御を行う制御装置5は、ステップS4の時間の設定処理を行う時間設定部7と、ステップS5の制御処理を行う制御部9とを備えている。ここで、v(t)は、τ=(t/tc)を用いて、v(τ)で表してもよいことは言うまでもない。
【0054】
なお、得られた速度関数としては、(8)式の係数a1に1.2、係数a2に−0.2を入れて、加減速時間tcを設定することが一例として挙げられるが、係数a1と係数a2はこれに限られるものではない。
【0055】
また、得られる速度関数の三角関数の級数の次数も2に限定されるものではなく、(9)式で表される一般化されたものであってもよい。なお、(9)式でkは1以上の整数である。
【0056】
【数5】
【0057】
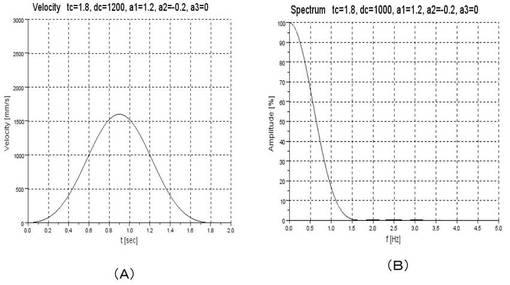
図9は、振動試験機を想定してシミュレーションした計算結果を示す図であって、速度曲線のグラフ(A)とそのFFTの結果のグラフ(B)を示す図である。ここでの想定された振動試験機には、固有振動数がfm1=1.54Hz、fm2=1.97Hz、fm3=2.29Hzの板ばねが搭載されている。最小固有振動数fminはfm1の1.54Hzである。(8)式にa1=1.2、a2=−0.2を入れて、1200mmを振動させずに最速で動かすには、特定の周波数fc(=1.5[Hz])以上でその成分が0になる加減速時間(移動時間)tcをFFTにて求めると、1.8[sec]に設定すればよいことになる。この場合の最高速度vmaxは1600[mm/s]となる。このようなシミュレーション結果を裏付けるべく、図9のグラフに従った速度により上記3つの板ばねを搭載した振動試験機を動かしたところ、3つの板ばねは振動せず共振が見られないことが目視により確認できた。
【0058】
[一定速度部分がある速度関数を表すための畳み込み積分]
以下、速度曲線が一定速度を挟んだ形の速度関数の場合に拡張するための説明を行うために、畳み込み積分という概念を用いる。
【0059】
畳み込み積分による一定速度型速度関数を説明するために、(10)式に、畳み込み積分の定義式を示す。
【0060】
【数6】
【0061】
畳み込み積分のフーリエ変換は、各関数をフーリエ変換したものの積となり、(11)式で表される。
【0062】
【数7】
【0063】
ここで、v(t)が一定速度型速度関数となるように、g(t)を(8)式で求めた高域の周波数に成分がない関数を参考にして表し、h(t)を矩形関数とすると、g(t)は(12)式で表され、h(t)は、(t<0,2ta+tb<t)では0、(0≦t≦2ta+tb)では1をとる関数u(t)として表される。
【0064】
【数8】
【0065】
これらのg(t)とh(t)の関数の畳み込み積分で関数v(t)を求めてそれを速度関数とする場合、関数v(t)のフーリエ変換は各関数g(t)とh(t)のフーリエ変換の積なので、矩形関数h(t)のサイドローブ部分と高域の周波数成分がない関数g(t)のその高域部分とをかけ合わせることとなるので、高域がない関数が得られて、複数の固有振動数がある帯域にスペクトル成分が生じていない速度関数v(t)を得ることができる。
【0066】
以下、(13)式のように畳み込み積分を計算する。
【0067】
【数9】
【0068】
ここで、(14)式と(15)式の2倍角の公式で(12)式を置きかえると、(16)式が得られる。
【0069】
【数10】
【0070】
(16)式をtで積分すると、s(t)が(17)式のように得られる。
【0071】
【数11】
【0072】
次に、矩形関数u(t)を(18)式のヘビサイド関数で表す。
【0073】
【数12】
【0074】
(13)式は、(16)式及び(18)式から、(19)式のようになる。
【0075】
【数13】
【0076】
ヘビサイド関数との畳み込み積分は、部分積分を用いつつ(19)式の積分が実行された形で表現すると、さらに(20)式のように表される。
【0077】
【数14】
【0078】
この(20)式で表される速度関数v(t)は、3つの区間[0,ta,ta+tb,2ta+tb]からなる。taまでは重なり部分の面積が増加する加速域で(0≦t≦ta)では(21)式で表され、taを超えると重なり面積は一定になって(ta≦t≦ta+tb)では(22)式で表され、ta+tbを超え出すと面積が減少する減速域となる(加速域と対称形)で(ta+tb≦t≦2ta+tb)では(23)式で表される。
【0079】
【数15】
【0080】
なお、上記の畳み込み積分を図で表すと、図10(A)に示すように矩形関数h(t)に対してg(t)という関数を移動することにより、畳み込み積分により得られる関数が図10(B)に示されており、このグラフが速度関数v(t)を表す。
【0081】
このように、(8)式と比較すれば分かるように、(12)式の関数g(t)が、taの時間設定により、フーリエ変換のスペクトル成分に、サイドローブが生じず、複数の固有振動数の最小固有振動数よりも値が小さな周波数帯域にメインローブとサイドローブとの境界周波数を生じさせることができる。この(12)式の関数g(t)と矩形関数h(t)の畳み込み積分のフーリエ変換は、(11)式に表したように、(12)式の関数g(t)をフーリエ変換したものと矩形関数h(t)をフーリエ変換したものとの積である。そのことから、矩形関数h(t)をフーリエ変換したものに多数の次元でのサイドローブが生じても、(20)式で表された速度関数v(t)は特定の次数以上のサイドローブが生じず、複数の固有振動数の最小固有振動数よりも値が小さな周波数帯域に、成分があるサイドローブと成分がないサイドローブとの境界周波数を生じさせることができる。これにより、移動装置が常に振動することなく、物体を揺らさずに運ぶことができる。
【0082】
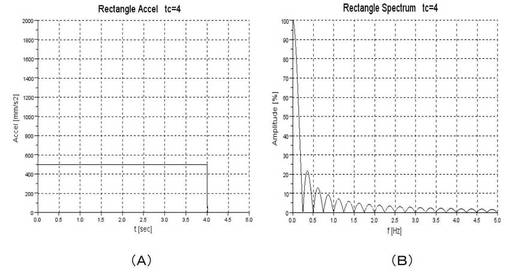
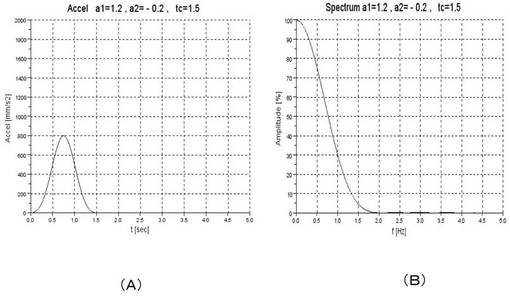
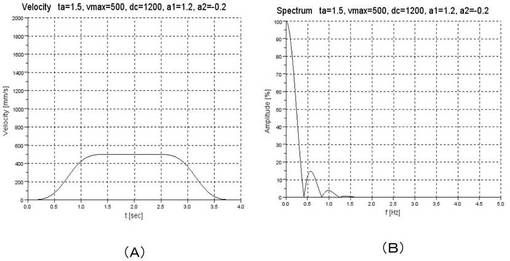
図11はh(t)として採用した矩形関数のグラフ(A)とそのFFTの結果のグラフ(B)を示した図である。図12はg(t)として採用した高域がない(ここではサイドローブがない)(12)式の関数であってa1=1.2、a2=−0.2とした場合の三角関数の級数で表された関数のグラフ(A)とそのFFTの結果のグラフ(B)を示した図である。ここで、図11及び図12において標記されるtcは図2等で示した加減速時間tcに対応する概念であり、図11ではtc=4、図12ではtc=1.5としている。なお、図12(B)と比較すると分かるように、図11(B)に示されるh(t)として採用した矩形関数のFFTでは、サイドローブがいくつも発生する。そして、図13は図11で示された矩形関数h(t)と図12で示された関数g(t)との畳み込み積分で得られる一定速度(vmax)がある速度曲線を表す速度関数v(t)のグラフ(A)とそのFFTの結果のグラフ(B)を示した図である。なお、図11(A)及び図12(A)は加速度曲線のグラフを表し、横軸は時間t[sec]、縦軸は加速度Accel[mm/s2]を表す。図13(A)は速度曲線のグラフを表し、横軸は時間t[sec]、縦軸は速度velocity[mm/s]を表す。図11(B)、図12(B)及び図13(B)は図11(A)、図12(A)及び図13(A)の各曲線をFFT解析した結果のグラフであり、横軸は周波数f[Hz]、縦軸は振幅amplitude[%]を表す。
【0083】
このように図11に示される矩形関数では現れる多数のサイドローブスペクトルと図12に示されている1.8Hzより上の高域の帯域にスペクトル成分がない関数のスペクトルが掛け合わされた状態として、図13(B)に示すFFTの結果が得られている。よって、畳み込み積分で速度関数を求めることは、フーリエ変換でのスペクトルの高域成分がなく、一定速度部分をもつ速度関数が得られることが示された。この速度関数が用いられて移動装置による物体を運ぶことが行われれば、移動装置の最低固有振動数を上記した高域とすることにより、物体の重量又は/及び移動装置における重心位置(高さ)が変化したことによって複数の固有振動数が生じる場合においても、移動装置には振動が常に発生せず、物体を揺らすことのないロバスト制振制御が可能になる。
【0084】
図14は、本発明の実施の形態に係るロバスト制振制御方法の他の例の処理について示した図である。
【0085】
図14において、ステップST1では、物体を運ぶ移動装置の速度関数を三角関数の級数と矩形関数との畳み込み積分で表す。ステップST2では、ステップST1で用いた三角関数の級数においてサイドローブが発生せず、且つ、畳み込み積分で得られた速度関数のフーリエ変換のスペクトル成分が特定の次数以上のサイドローブでは生じない係数a1等を求める。ステップST3では、事前に動かすことにより、又は、シミュレーションにより、物体の重量と移動装置における重心位置とから生じる複数の固有振動数を求めて、その中から最低固有振動数fminを求める。ステップST4では、ステップST3で求めた最低固有振動数fminがメインローブとサイドローブとの境界周波数よりも大きな値となる上の帯域となるように(言い換えると、ステップST3で求めた最低固有振動数fminよりも値が小さな周波数帯域にメインローブとサイドローブとの境界周波数が生じるように)、且つ、畳み込み積分で得られた関数のフーリエ変換の最低固有振動数fminが、成分があるサイドローブと成分がないサイドローブとの境界周波数よりも大きな値となる上の帯域となるように(言い換えると、ステップST3で求めた最低固有振動数fminよりも値が小さな周波数帯域に成分があるサイドローブと成分がないサイドローブとの境界周波数が生じるように)、加速時間(又は減速時間)を設定する。ステップST5では、得られた速度関数により移動装置の速度を制御して物体を運ぶ。なお、ロバスト制振制御装置としては、図8の時間設定部7がステップST4の設定処理を行い、制御部9がステップST5の制御処理を行えばよい。
【0086】
なお、得られた速度関数としては、(12)式のa1に1.2、a2に−0.2を入れて、加速時間taを設定することが一例として挙げられるが、a1とa2はこれに限られるものではない。
【0087】
また、速度関数を求めるためにg(t)として採用した三角次数の級数の次数も2に限定されのるものではなく、(9)式で表される一般化されたものであってもよい。なお、(9)式でkは1以上の整数である。
【0088】
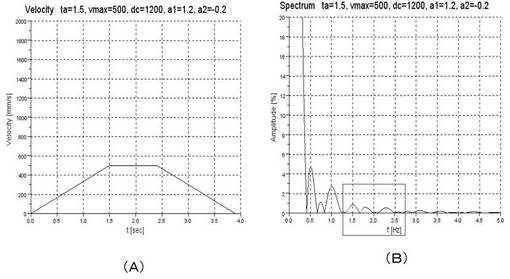
図15はta=1.5secで最高速度が500[mm/s]の台形速度関数の場合を示す図であり、図16は(21)〜(23)式のa1=1.2、a2=−0.2をとり、ta=1.5secで最高速度が500[mm/s]の速度曲線で動かした場合を示す図である。図15では、四角で囲んだ部分からも分かるように、fm3が含まれる高域成分なないが、fm1とfm2がある1.5Hz〜2.3Hzに成分があるので揺れる。図16では、四角で囲んだ部分からも分かるように、1.54Hz以上の高域に成分がなく、fm1とfm2とfm3のいずれに対しても成分がないので揺れない。これらのことは、図15の関数に関して表した図17(A)に示す過渡応答と、図16の関数に関して表した図17(B)の過渡応答のグラフからも分かる。
【0089】
このような発明では、以下の点が特徴として挙げられる。まず、移動装置の固有振動数が広い範囲で変動しても振動(特に残留振動)を発生させることなく、移動装置の位置決め動作を行うことができる。特に、加速時間(若しくは減速時間)又は加減速時間の速度変化を数式によって求める手法なので、サーボパック、インバータなどの制御装置への実装が行い易い。また既存の制御装置へ速度指令として外部のPLC、マイコンボードなどの制御装置から指令を行うという手法もとることができて、既存の装置を大きく変更することなく有効利用できる。
【0090】
なお、上記実施の形態では、数式を使って根拠を明確にしながら制御装置、制御方法について説明したが、プログラムの発明、記録媒体の発明と捉えてもよい。
【符号の説明】
【0091】
5・・・制御装置、7・・・時間設定部、9・・・制御部
【技術分野】
【0001】
本発明は、制御方法、プログラム、記録媒体、及び、制御装置に関し、特に物体を運ぶ移動装置の速度を制御する制御方法等に関する。
【背景技術】
【0002】
移動装置の一例としての制御対象機械を目標位置へ移動させて停止させる際に、その停止時の慣性力による制御対象機械の振動を抑制するように工夫する技術として、特許文献1に記載のものがある。
【0003】
特許文献1では、具体的には、先端に重量物(運ばれる物体)が取り付けられた長尺のアームを移動させて目標位置に停止させるような場合に、停止時に発生してしまう振動を抑制するために、速度指令値に補正量を加算し、又は、トルク若しくは推力指令値に補正量を加算し、加算された値によって制御対象機械の駆動制御を行うことにしている。
【0004】
また、他の技術として、本願発明者によって、移動装置の一例であるスタッカクレーンの制振制御については、特許文献2に記載の技術も提案されている。以下、まず、スタッカクレーンについて簡単に説明し、特許文献2の技術も簡単に説明する。
【0005】
図18はスタッカクレーンを説明する図である。スタッカクレーン51は、図19(B)に示される加速度パターンを有する図19(A)に示すような増速領域、等速領域及び減速領域を有する速度パターンで走行レール53上を車輪54により往復走行可能な走行台車55と、これに立設された昇降マスト57と、搬送物59を搭載し昇降マスト57に沿って昇降する昇降台61とを備える。
【0006】
図20は特許文献2の技術を説明するための図である。特許文献2の技術では、昇降台61及び搬送物59の重量と昇降台61の高さ位置に基づいてスタッカクレーンの固有振動周期が予め求められる。そして、この2倍以上の整数倍に増速領域及び減速領域の時間が設定され、増速領域及び減速領域の各加速度パターンが、図20(B)に示すような左右対称の正の値をとる増加及び正の値をとる減少加速度と負の値をとる増加及び負の値をとる減少加速度とし、図20(A)に示す速度パターンで、搬送物59を搭載した昇降台61の増速領域及び減速領域の終了後に発生する振動の振幅をフィードフォワード的に制御して小さくしている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特許第3750633号公報
【特許文献2】特開2010−30728号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、特許文献1及び2記載の技術のいずれにおいても、移動装置にひとつの固有振動数があることを前提に、その振動をあくまでも抑制するという手段を採用しており、固有振動数が違った場合,振動抑制の効果は無い。そのため、加速時及び減速時に振動が起きてしまうことには変わりなく、さらには、走行中の振動が発生してしまうことも起こり得る。
【0009】
この点については、特許文献2でも指摘している。すなわち、特許文献2の技術であっても、上記のように固有振動周期を予め求めているが、固有振動周期は、図21にも示されるように、昇降台及び搬送物の重量と昇降台の高さ位置により異なる周期をとる。そのため、例えば、昇降台が昇降しながら走行台車が停止する場合には、昇降マストの固有振動周期が変化する結果、予め求めた固有振動周期とは異なる固有振動周期との関係で、走行台車の停止タイミングで、昇降マストの撓みがゼロ且つ昇降マストの移動速度がゼロということはなく、昇降マストの振動が小さいながらも発生してしまうという問題があった。
【0010】
このような現象が、移動する物体の重量又は/及び重心位置(高さ)が変化することにより固有振動周期(固有振動数)の変化が生じてしまう場合には、同様に、振動が生じてしまうという共通の問題として起っていた。具体的には、スタッカクレーンにおいては、上記したように同一の重量の搬送物を移動中に異なる高さ位置に変化させながら移動する場合のほか、同一の高さであっても搬送毎に同じ重量の搬送物を搬送するとは限られないので、搬送物の重量が変化する場合にも起こり得る。
【0011】
さらに、移動装置としての搬送台車での搬送においても、常に搭載された荷の重量と重心位置(高さ)が同じで搬送が行われるのではなく、搭載された荷の重量と重心位置(高さ)が搬送毎に変化し得ることから、荷を揺らしてしまうという現象が生じていた。さらに、固有振動周期(固有振動数)が異なる複数の物品や機構を同時に移動装置により移動させて停止させる場合においても、固有振動周期(固有振動数)が複数在ることから、振動が発生してしまっていた。
【0012】
さらに言えば、上記した搬送台車と同様に、コンベア、天井クレーン、エレベータなどにおいても、人や物を運ぶ際に、加速時及び減速時になどに移動装置であるコンベア等が人や物を揺らしてしまうという問題もあるが、これも移動装置であるコンベア等を全体として捉えた場合に、複数の固有振動周期(固有振動数)が生じてしまう結果が原因と考えられる。
【0013】
ゆえに、本発明は、物体を運ぶ移動装置の速度を制御するにあたり、物体の重量又は/及び重心位置(高さ)が変わることにより固有振動数の変化が生じる場合において、加速時減速時に移動装置に振動を生じさせず走行中に振動を生じさせない制振制御を行うことにより、運ばれる物体に移動装置の加減速に伴う揺れを全く生じさせないことによって安定して確実且つ迅速に物体を運ぶことができる制御方法等を提供することを目的とする。
【課題を解決するための手段】
【0014】
請求項1に係る発明は、物体を運ぶ移動装置の速度を制御する制御方法であって、前記移動装置が、前記物体の重量又は/及び前記移動装置における前記物体の重心位置が変化することによって固有振動数が変化するものであって前記変化する固有振動数の中に最小固有振動数fminが存在するものであり、前記速度を示す速度関数v(t)は、加速時間、減速時間又は加減速時間において変化するものであるとともに、当該速度関数v(t)をフーリエ変換すると特定の周波数fc以上でそのスペクトル成分が0となるものであり、前記特定の周波数fcが前記最小固有振動数fminよりも小さい値となる前記加速時間、前記減速時間又は前記加減速時間を設定する時間設定ステップと、前記設定された時間において、時刻tを変化させて、前記移動装置の時刻tにおける速度を前記速度関数v(t)で制御する速度制御ステップとを含むものである。
【0015】
これにより、物体の重量又は/及び移動装置における物体の重心位置が変化することによって固有振動数が変化するものであっても、速度関数v(t)がフーリエ変換すると特定の周波数fc以上でそのスペクトル成分が0となる関数であり、特定の周波数fcが最小固有振動数fminよりも小さい値となる加速時間、減速時間又は加減速時間の設定を行うことにより、設定された時間において、時刻tを変化させて、移動装置の時刻tにおける速度を速度関数v(t)で制御すれば、変化しうる範囲のどの固有振動数においてもフーリエ変換したスペクトル成分が0であることから移動装置及び物体を振動させずに移動できる制振制御を行える。
【0016】
請求項2に係る発明は、請求項1において、前記速度関数v(t)が、フーリエ変換して得られるスペクトル分布にサイドローブを生じないものであり又は特定の次数以上のサイドローブを生じないものであり、前記時間設定ステップにおいて、前記加減速時間又は前記加速時間若しくは前記減速時間の設定を行うことにより、前記スペクトル分布において、前記最小固有振動数fminよりも値が小さな周波数帯域に、メインローブとサイドローブとの間の境界周波数を生じさせ、又は、成分があるサイドローブと成分がないサイドローブとの間の境界周波数を生じさせるようにして、前記境界周波数を前記特定の周波数fcとするものである。
【0017】
これにより、フーリエ変換して得られるスペクトル分布にはサイドローブ自体を生じない又は特定の次数以上のサイドローブを生じないことから、そして、スペクトル分布におけるメインローブとサイドローブとの間の境界周波数を最小固有振動数fminの値よりも小さな値の周波数帯域に生じさせ又は成分があるサイドローブと成分がないサイドローブとの間の境界周波数を最小固有振動数fminの値よりも小さな値の周波数帯域に生じさせ、その境界周波数を特定の周波数fcとすることから、複数の固有振動数のいずれにおいてもフーリエ変化したスペクトル成分を0とでき、移動装置及び物体を全く振動させないという制振制御を行える。
【0018】
請求項3に係る発明は、請求項2において、前記移動装置が、前記物体を第1の地点から第2の地点へ運ぶものであり、前記速度関数v(t)が、前記第1の地点における移動開始時と前記第2の地点における移動終了時とにおける速度が0をとり前記第1の地点と前記第2の地点との間の中央位置での速度が最高速度をとり、且つ、前記第1の地点から前記中央位置までと前記中央位置から前記第2の地点までとが対称性がある三角関数の級数で表されるものであって、当該三角関数の級数で表される速度関数v(t)をフーリエ変換して得られるスペクトル分布は、サイドローブが生じないものであり、前記時間設定ステップにおいて、前記加減速時間の設定を行うことにより、前記最小固有振動数fminよりも値が小さな周波数帯域に前記スペクトル分布のメインローブとサイドローブとの間の境界周波数を前記特定の周波数fcとして生じさせるものである。
【0019】
これにより、中央位置で最高速度をとり第1の地点から第2の地点に物体を運ぶ場合における速度が三角関数の級数で表される場合において、請求項2に係る発明と同様な作用が得られる。
【0020】
請求項4に係る発明は、請求項3において、前記速度関数v(t)が式(eq1)であり、式(eq1)において、前記第1の地点から前記第2の地点までの移動距離はdであり、前記加減速時間がtcであり、係数a1及びa2はa1+a2=1であって式(eq1)による前記速度関数v(t)をフーリエ変換してできるスペクトル分布のサイドローブが生じない係数値とされるものである。
【0021】
これにより、2倍の高調波までの近似式による三角関数の級数によって表される速度関数v(t)の場合において、請求項3と同様な作用が得られる。
【0022】
請求項5に係る発明は、請求項2において、前記移動装置が、前記物体を第1の地点から第2及び第3の地点を経由して第4の地点へ運ぶものであり、前記第1の地点から前記第2の地点までは加速し、前記第2の地点から前記第3の地点までは一定の速度vmaxをとり、前記第3の地点から前記第4の地点までは減速するものであり、前記速度関数v(t)が、三角関数の級数で表される関数g(t)と矩形関数h(t)との畳み込み積分で表されて一定速度部分があり、前記第1の地点における移動開始時と前記第4の地点における移動終了時とにおける速度が0をとり前記第1の地点から前記第2の地点までと前記第3の地点から前記第4の地点までとが対称性がある速度変化の関数で表されるものであり、前記関数g(t)をフーリエ変換してできるスペクトル分布は、サイドローブが生じないものであり、前記速度関数v(t)をフーリエ変換してできるスペクトル分布は、特定の次数以上のサイドローブが生じないものであり、前記時間設定ステップにおいて、前記加速時間又は前記減速時間の設定を行うことにより、前記速度関数v(t)をフーリエ変換してできるスペクトル分布において前記最小固有振動数fminよりも小さな値の周波数帯域に成分が生じたサイドローブと成分が生じていないサイドローブとの間の境界周波数を前記特定の周波数fcとして生じさせるものである。
【0023】
これにより、vmaxという一定速度で運ぶ状態がある場合の速度関数v(t)が、フーリエ変換のスペクトル成分にはサイドローブが生じない三角関数の級数で表される関数g(t)と矩形関数h(t)との畳み込み積分で表される場合において、請求項2に係る発明と同様な作用が得られる。
【0024】
請求項6に係る発明は、請求項5において、前記速度関数v(t)が、加速時間0≦t≦taでは式(eq2)の関数で表され、ta≦t≦ta+tbではvmaxで一定であり、ta+tb≦t≦2ta+tbでは式(eq3)の関数で表されて加速とは対称形で減速するものであり、式(eq2)、式(eq3)及び式(eq4)の係数a1及びa2はa1+a2=1であって式(eq4)式のg(t)をフーリエ変換してできるスペクトル分布のサイドローブが生じない係数値とすることにより、式(eq4)のg(t)と矩形関数h(t)との畳み込み積分で表される式(eq2)及び式(eq3)で特定される速度関数v(t)をフーリエ変換してできるスペクトル分布は、特定の次数以上のサイドローブが生じないものである。
【0025】
これにより、速度関数v(t)を求めるために矩形関数h(t)との畳み込み積分に用いられる関数g(t)が2倍の高調波までの近似式による三角関数の級数によって表される場合において、畳み込み積分のフーリエ変換が各関数のフーリエ変換したものの積で表されるということを利用して、請求項5と同様な作用が得られる。
【0026】
請求項7に係る発明では、請求項4又は6記載の制御方法において、前記係数a1が、ブラックマン窓関数の値以上である。
【0027】
請求項8に係る発明は、請求項1から7のいずれかに記載の制御方法をコンピュータに実行させるためのプログラムである。
【0028】
請求項9に係る発明は、請求項8記載のプログラムを記録したコンピュータが読み取り可能な記録媒体である。
【0029】
請求項10に係る発明は、物体を運ぶ移動装置の速度を制御する制御装置であって、前記移動装置が、前記物体の重量又は/及び前記移動装置における前記物体の重心位置が変化することによって固有振動数が変化するものであって前記変化する固有振動数の中に最小固有振動数fminが存在するものであり、前記速度を示す速度関数v(t)は、加速時間、減速時間、又は、加減速時間において変化するものであるとともに、当該速度関数v(t)のフーリエ変換が特定の周波数fc以上でそのスペクトル成分が0となるものであり、前記特定の周波数fcが前記最小固有振動数fminよりも小さい値となる前記加速時間、前記減速時間、又は、前記加減速時間を設定する時間設定手段と、前記設定された時間において、時刻tを変化させて、前記移動装置の時刻tにおける速度を速度関数v(t)で制御する速度制御手段とを備える。
【0030】
【数1】
【発明の効果】
【0031】
以上のように、本発明によれば、物体の重量又は/及び移動装置における物体の重心位置が変化することによって固有振動数が変化するものであっても、フーリエ変換によるスペクトル分布で示されるように、変化しうる範囲のどの固有振動数においてもスペクトル成分が0であることから、移動装置及び物体を振動させずに移動する制振制御を行える。これにより、例えばスタッカクレーンの停止時の振動を生じさせず、また移動中も振動を生じさせず、運ばれる物体に対して移動装置の振動に伴う揺れを全く生じさせないことによって、安定して確実且つ迅速に物体を運ぶことができる。
【図面の簡単な説明】
【0032】
【図1】物体を運ぶ移動装置の速度が中央で最速となり一定速度部分がない速度曲線で表される場合において、移動距離d=1000[mm]、加減速時間tc=1.0[s]、係数a1=4/7、係数a2=2/7、係数a3=1/7とした場合の(2)式で表される速度曲線のグラフ(A)とそのFFT(高速フーリエ変換)解析した結果のグラフ(B)を示す図である。
【図2】表1で得られた結果の速度曲線のグラフ(A)とそのFFTの結果のグラフ(B)を示す図であって、表1のNo2の場合を示した図である。
【図3】表1で得られた結果の速度曲線のグラフ(A)とそのFFTの結果のグラフ(B)を示す図であって、表1のNo3の場合を示した図である。
【図4】表1で得られた結果の速度曲線のグラフ(A)とそのFFTの結果のグラフ(B)を示す図であって、表1のNo4の場合を示した図である。
【図5】表1で得られた結果の速度曲線のグラフ(A)とそのFFTの結果のグラフ(B)を示す図であって、表1のNo5の場合を示した図である。
【図6】表1で得られた結果の速度曲線のグラフ(A)とそのFFTの結果のグラフ(B)を示す図であって、表1のNo7の場合を示した図である。
【図7】本発明の実施の形態に係るロバスト制振制御方法の一例の処理について示した図である。
【図8】本発明の実施の形態に係るロバスト制振制御装置の一例の構成について示した概略ブロック図である。
【図9】振動試験機を想定したシミュレーションの計算結果を示す図であって、速度曲線のグラフ(A)とそのFFTの結果のグラフ(B)を示す図である。
【図10】畳み込み積分を説明するための図である。
【図11】h(t)として採用した矩形関数のグラフ(A)とそのFFTの結果のグラフ(B)を示した図である。
【図12】g(t)として採用した高域がない(ここではサイドローブがない)(12)式の関数であってa1=1.2、a2=−0.2とした場合の三角関数の級数で表された関数のグラフ(A)とそのFFTの結果のグラフ(B)を示した図である。
【図13】図11で示された矩形関数h(t)と図12で示された関数g(t)との畳み込み積分で得られる一定速度(vmax)がある速度曲線を表す速度関数v(t)のグラフ(A)とそのFFTの結果のグラフ(B)を示した図である。
【図14】本発明の実施の形態に係るロバスト制振制御方法の他の例の処理について示した図である。
【図15】振動試験機を想定したシミュレーションの計算結果を示す図であって、振動試験機には固有振動数がfm1=1.54Hz、fm2=1.97Hz、fm3=2.29Hzの板ばねが搭載されており、1200mmを動かす場合のta=1.5secで最高速度が500[mm/s]の台形速度関数の場合を示す速度曲線のグラフ(A)とそのFFT解析した結果のグラフ(B)を示す図である。
【図16】振動試験機を想定したシミュレーションの計算結果を示す図であって、振動試験機には固有振動数がfm1=1.54Hz、fm2=1.97Hz、fm3=2.29Hzの板ばねが搭載されおり、1200mmを振動させずに一定速を挟んだ速度曲線で動かす場合の(21)〜(23)式のa1=1.2、a2=−0.2をとり、ta=1.5secで最高速度が500[mm/s]の速度曲線で動かした場合を示す速度曲線のグラフ(A)とそのFFT解析した結果のグラフ(B)を示す図である。
【図17】図15に示した関数の過渡応答のグラフ(A)と図16に示した関数の過度応答のグラフ(B)を示した図であって、想定された振動試験機で動かしてみた場合の振動の様子をシミュレーションしたものを表した図である。
【図18】スタッカクレーンを説明する図である。
【図19】図18のスタッカクレーンの速度パターン(A)と加速度パターン(B)を示す図である。
【図20】特許文献2の技術を説明するための図である。
【図21】固有振動周期が昇降台及び搬送物の重量と昇降台の高さ位置により異なる周期をとることを示す図である。
【発明を実施するための形態】
【0033】
[本願に係る発明へのアプローチ]
以下、本願に係る発明へのアプローチを説明するために「振動と重ね合わせの原理とフーリエ変換との関係」から説明する。
【0034】
構造物(移動装置)の振動とは、ニュートン力学でいう「慣性力」と「弾性力」とが互いに作用し合って、その「運動エネルギー」と「弾性エネルギー」とが交互に入れ替わる現象と捉えることができる。外力によって機械という構造物には「たわみ」という弾性力が発生する。そして、複数の外力が構造物に作用するとき、そのたわみは、1つずつの外力が同じ構造物に作用した場合のたわみを足し合わせたものと等しくなる。これを重ね合わせの原理と言い、数学では、「線形システム」であるという。外力という時間関数をフーリエ級数で表すと個々の周期の外力がたわみを発生させると考えることができ、機械という構造物の固有振動数と同じ周期の外力がかかった場合、「共振振動」が発生する。これが「振動が発生した」ということを意味する。
【0035】
外力を非周期関数とした場合、フーリエ変換によってその周波数成分の分布である「スペクトル」を計算できる。機械という構造物の固有振動数と同じ周波数のスペクトルの大きさ(振幅)が大きい場合に、共振振動が発生してしまう。逆に、スペクトルに構造物の固有振動数成分がない場合には、振動は発生しない。
【0036】
フーリエ変換の性質として、微分・積分によってスペクトル分布は変化しない。そのため、外力が重量(質量)に加える加速度であることから、その加速度関数のスペクトルに固有振動数の成分が生じなければ、振動は発生しないことになる。このことは、加速度関数を積分した速度関数のスペクトル分布に固有振動数の成分が含まれていなければ、振動が発生しないことを意味することでもある。
【0037】
また、複数の非周期関数の足し算は、個々のスペクトルの足し算であり、下記に示す三角関数の級数で表す速度関数は、足し算によって高い成分をキャンセルして無くすことができることを表すことになる。
【0038】
このように、本願の発明者は、上記のような考えのもと、従来までのアプローチとは異なる独創的なアプローチからロバスト制振制御を考えた。そして、物体を運ぶ移動装置という機械の構造物が複数の固有振動数を生じてしまう場合において、その最低固有振動数よりも高域の帯域ではスペクトル成分が発生しないようにすることにより、振動を発生させないということに着眼し、以下に説明するロバスト制振制御は見出された。
【0039】
[一定速度部分がない速度関数を表すための三角級数速度関数]
まず、速度関数を三角関数の級数で表す三角級数速度関数について説明する。ここで、速度関数の境界条件は、動作開始と終了時に速度0、且つ、動作中央位置で最大速度をとるものとする。また、速度曲線は加速と減速の速度変化が対称形とする。三角関数の和が用いられて関数が表現されるとすれば、個々の三角関数成分も境界条件を満たす必要がある。
【0040】
0から始まって0で終わる区間を対称に変化する三角関数候補としては、1−cos2θ=2sin2θがある。この三角関数はθ=0,πで値が0、θ=π/2で最大値となるので、上記境界条件を満たす。そのn倍周期の成分を足し合わせる場合もこの境界条件は守られるので、加速と減速の曲線の形を変化させることができる。
【0041】
下記(1)式を用いることにより3倍高調波までの級数で近似してみる場合を説明する。(1)式は、(2)式のように式変形できる。
【0042】
【数2】
【0043】
最大速度vmaxと移動距離d(=d1+d2+d3)を求めると、下記の関係式が得られる。(4)〜(6)式により、d=d1+d2+d3=d(a1+a2+a3)となり、a1+a2+a3=1が得られる。ここで、tcは、移動距離dを移動する時間である。
【0044】
【数3】
【0045】
このような関係が分かった上で、d=1000[mm]、tc=1.0[s]、a1=4/7、a2=2/7、a3=1/7とした場合の速度曲線のグラフとそのFFT(高速フーリエ変換)解析した結果のグラフは、図1のように得られる。なお、図1(A)は速度曲線のグラフを表し、横軸は時間t[sec]、縦軸は速度velocity[mm/s]を表す。図1(B)は図1(A)の速度曲線をFFT解析した結果のグラフであり、横軸は周波数f[Hz]、縦軸は振幅amplitude[%]を表す。図1(A)において、4つの曲線が示されており、4つの曲線は、それぞれ、基本周期、倍周期、3倍周期とこれらを足した合成波を表している。
【0046】
[三角級数速度関数の係数]
次に、三角級数速度関数をフーリエ変換した時に、希望する周波数帯域の成分が最小になるように級数の係数を決定することを検討する。なお、級数は2倍高調波までの近似式とすると、(7)式と(8)式が得られる。但し、a1+a2=1という関係がある。
【0047】
【数4】
【0048】
FFTによる数値解析計算を行い、サイドローブが最小になる係数を見つける。具体的には、d=1000[mm]、tc=1.0[s]、a1とa2を0.1刻みで図1のようなグラフを描いてみた。その結果は、下記表1に示す通りである。表1において、fc1はメインローブとサイドローブとの境界周波数、fc2は第1サイドローブと第2サイドローブとの境界周波数、A1は第1サイドローブの最高振幅、vmaxは最高速度である。
【0049】
【表1】
【0050】
上記表1で得られた計算結果の速度曲線のグラフとそのFFTの結果のグラフについて、No2の場合を図2に示し、No3の場合を図3に示し、No4の場合を図4に示し、No5の場合を図5にし、No7の場合を図6に示す。なお、図2(A)、図3(A)、図4(A)、図5(A)及び図6(A)は速度曲線のグラフを表し、横軸は時間t[sec]、縦軸は速度velocity[mm/s]を表す。図2(B)、図3(B)、図4(B)、図5(B)及び図6(B)は図2(A)、図3(A)、図4(A)、図5(A)及び図6(A)の各速度曲線をFFT解析した結果のグラフであり、横軸は周波数f[Hz]、縦軸は振幅amplitude[%]を表す。図2(A)、図3(A)、図4(A)及び図6(A)において3つの曲線が示されており、3つの曲線は、それぞれ、基本周期、倍周期とこれらを足した合成波を表している。
【0051】
このような結果より、サイドローブがなくなるのは、a1がBlackman窓関数の場合の値(0.5/0.42≒1.19)以上の場合である。a2については、a1+a2=1の関係があるため、サイドローブがなくなるのは、Blackman窓関数の場合の値(−0.08/0.42≒−0.19)以下の場合である。そのため、ロバスト制振制御の速度関数としては、a1がBlackman窓関数の場合の値以上(a2がBlackman窓関数の場合の値以下)とすればよい。その上で、Blackman窓関数の場合から外れるほどfc1に示される境界周波数が大きくなっていき最高速度が大きくなっていくので、複数の固有振動数が生じている場合の最低固有振動数fminがfc1よりも大きな値となる上の帯域となるためには、a1は、Blackman窓関数の場合の値とすれば最もバランスが良く好ましいが、1.2のような値も最高速度が大きすぎず且つfc1も大きすぎないという点からすれば好ましい。
【0052】
[方法と装置]
以上の原理をもとに、本発明の実施の形態に係るロバスト制振制御方法の一例の処理について図7に示し、本発明の実施の形態に係るロバスト制振制御装置の一例の構成について概略ブロックで図8に示す。
【0053】
図7において、ステップS1では、物体を運ぶ移動装置の速度関数v(t)を三角関数の級数で表す。ステップS2では、ステップS1で表した三角関数の級数においてサイドローブが発生しない係数a1等を求める。このステップS1及びS2は制御の基本設計段階で行われる。ステップS3では、実際の装置が出来て、事前に動かすことにより、又は、シミュレーションにより、物体の重量と移動装置における重心位置とから生じる複数の固有振動数を求めて、その中から最低固有振動数fminを求める。ステップS1〜S3までの処理は設備が出来ると値を決めることができる処理となっている。ステップS4では、ステップS3で求めた最低固有振動数fminがメインローブとサイドローブとの境界周波数fc1よりも大きな値の帯域となるように(言い換えると、ステップS3で求めた最低固有振動数fminよりも値が小さな周波数帯域にメインローブとサイドローブとの境界周波数fc1が生じるように)、加減速時間tcを設定する。ステップS5では、係数a1等と加減速時間tcが決まって得られた速度関数v(t)により物体1を運ぶ移動装置3の速度を制御して物体を運ぶ。図8のロバスト制振制御を行う制御装置5は、ステップS4の時間の設定処理を行う時間設定部7と、ステップS5の制御処理を行う制御部9とを備えている。ここで、v(t)は、τ=(t/tc)を用いて、v(τ)で表してもよいことは言うまでもない。
【0054】
なお、得られた速度関数としては、(8)式の係数a1に1.2、係数a2に−0.2を入れて、加減速時間tcを設定することが一例として挙げられるが、係数a1と係数a2はこれに限られるものではない。
【0055】
また、得られる速度関数の三角関数の級数の次数も2に限定されるものではなく、(9)式で表される一般化されたものであってもよい。なお、(9)式でkは1以上の整数である。
【0056】
【数5】
【0057】
図9は、振動試験機を想定してシミュレーションした計算結果を示す図であって、速度曲線のグラフ(A)とそのFFTの結果のグラフ(B)を示す図である。ここでの想定された振動試験機には、固有振動数がfm1=1.54Hz、fm2=1.97Hz、fm3=2.29Hzの板ばねが搭載されている。最小固有振動数fminはfm1の1.54Hzである。(8)式にa1=1.2、a2=−0.2を入れて、1200mmを振動させずに最速で動かすには、特定の周波数fc(=1.5[Hz])以上でその成分が0になる加減速時間(移動時間)tcをFFTにて求めると、1.8[sec]に設定すればよいことになる。この場合の最高速度vmaxは1600[mm/s]となる。このようなシミュレーション結果を裏付けるべく、図9のグラフに従った速度により上記3つの板ばねを搭載した振動試験機を動かしたところ、3つの板ばねは振動せず共振が見られないことが目視により確認できた。
【0058】
[一定速度部分がある速度関数を表すための畳み込み積分]
以下、速度曲線が一定速度を挟んだ形の速度関数の場合に拡張するための説明を行うために、畳み込み積分という概念を用いる。
【0059】
畳み込み積分による一定速度型速度関数を説明するために、(10)式に、畳み込み積分の定義式を示す。
【0060】
【数6】
【0061】
畳み込み積分のフーリエ変換は、各関数をフーリエ変換したものの積となり、(11)式で表される。
【0062】
【数7】
【0063】
ここで、v(t)が一定速度型速度関数となるように、g(t)を(8)式で求めた高域の周波数に成分がない関数を参考にして表し、h(t)を矩形関数とすると、g(t)は(12)式で表され、h(t)は、(t<0,2ta+tb<t)では0、(0≦t≦2ta+tb)では1をとる関数u(t)として表される。
【0064】
【数8】
【0065】
これらのg(t)とh(t)の関数の畳み込み積分で関数v(t)を求めてそれを速度関数とする場合、関数v(t)のフーリエ変換は各関数g(t)とh(t)のフーリエ変換の積なので、矩形関数h(t)のサイドローブ部分と高域の周波数成分がない関数g(t)のその高域部分とをかけ合わせることとなるので、高域がない関数が得られて、複数の固有振動数がある帯域にスペクトル成分が生じていない速度関数v(t)を得ることができる。
【0066】
以下、(13)式のように畳み込み積分を計算する。
【0067】
【数9】
【0068】
ここで、(14)式と(15)式の2倍角の公式で(12)式を置きかえると、(16)式が得られる。
【0069】
【数10】
【0070】
(16)式をtで積分すると、s(t)が(17)式のように得られる。
【0071】
【数11】
【0072】
次に、矩形関数u(t)を(18)式のヘビサイド関数で表す。
【0073】
【数12】
【0074】
(13)式は、(16)式及び(18)式から、(19)式のようになる。
【0075】
【数13】
【0076】
ヘビサイド関数との畳み込み積分は、部分積分を用いつつ(19)式の積分が実行された形で表現すると、さらに(20)式のように表される。
【0077】
【数14】
【0078】
この(20)式で表される速度関数v(t)は、3つの区間[0,ta,ta+tb,2ta+tb]からなる。taまでは重なり部分の面積が増加する加速域で(0≦t≦ta)では(21)式で表され、taを超えると重なり面積は一定になって(ta≦t≦ta+tb)では(22)式で表され、ta+tbを超え出すと面積が減少する減速域となる(加速域と対称形)で(ta+tb≦t≦2ta+tb)では(23)式で表される。
【0079】
【数15】
【0080】
なお、上記の畳み込み積分を図で表すと、図10(A)に示すように矩形関数h(t)に対してg(t)という関数を移動することにより、畳み込み積分により得られる関数が図10(B)に示されており、このグラフが速度関数v(t)を表す。
【0081】
このように、(8)式と比較すれば分かるように、(12)式の関数g(t)が、taの時間設定により、フーリエ変換のスペクトル成分に、サイドローブが生じず、複数の固有振動数の最小固有振動数よりも値が小さな周波数帯域にメインローブとサイドローブとの境界周波数を生じさせることができる。この(12)式の関数g(t)と矩形関数h(t)の畳み込み積分のフーリエ変換は、(11)式に表したように、(12)式の関数g(t)をフーリエ変換したものと矩形関数h(t)をフーリエ変換したものとの積である。そのことから、矩形関数h(t)をフーリエ変換したものに多数の次元でのサイドローブが生じても、(20)式で表された速度関数v(t)は特定の次数以上のサイドローブが生じず、複数の固有振動数の最小固有振動数よりも値が小さな周波数帯域に、成分があるサイドローブと成分がないサイドローブとの境界周波数を生じさせることができる。これにより、移動装置が常に振動することなく、物体を揺らさずに運ぶことができる。
【0082】
図11はh(t)として採用した矩形関数のグラフ(A)とそのFFTの結果のグラフ(B)を示した図である。図12はg(t)として採用した高域がない(ここではサイドローブがない)(12)式の関数であってa1=1.2、a2=−0.2とした場合の三角関数の級数で表された関数のグラフ(A)とそのFFTの結果のグラフ(B)を示した図である。ここで、図11及び図12において標記されるtcは図2等で示した加減速時間tcに対応する概念であり、図11ではtc=4、図12ではtc=1.5としている。なお、図12(B)と比較すると分かるように、図11(B)に示されるh(t)として採用した矩形関数のFFTでは、サイドローブがいくつも発生する。そして、図13は図11で示された矩形関数h(t)と図12で示された関数g(t)との畳み込み積分で得られる一定速度(vmax)がある速度曲線を表す速度関数v(t)のグラフ(A)とそのFFTの結果のグラフ(B)を示した図である。なお、図11(A)及び図12(A)は加速度曲線のグラフを表し、横軸は時間t[sec]、縦軸は加速度Accel[mm/s2]を表す。図13(A)は速度曲線のグラフを表し、横軸は時間t[sec]、縦軸は速度velocity[mm/s]を表す。図11(B)、図12(B)及び図13(B)は図11(A)、図12(A)及び図13(A)の各曲線をFFT解析した結果のグラフであり、横軸は周波数f[Hz]、縦軸は振幅amplitude[%]を表す。
【0083】
このように図11に示される矩形関数では現れる多数のサイドローブスペクトルと図12に示されている1.8Hzより上の高域の帯域にスペクトル成分がない関数のスペクトルが掛け合わされた状態として、図13(B)に示すFFTの結果が得られている。よって、畳み込み積分で速度関数を求めることは、フーリエ変換でのスペクトルの高域成分がなく、一定速度部分をもつ速度関数が得られることが示された。この速度関数が用いられて移動装置による物体を運ぶことが行われれば、移動装置の最低固有振動数を上記した高域とすることにより、物体の重量又は/及び移動装置における重心位置(高さ)が変化したことによって複数の固有振動数が生じる場合においても、移動装置には振動が常に発生せず、物体を揺らすことのないロバスト制振制御が可能になる。
【0084】
図14は、本発明の実施の形態に係るロバスト制振制御方法の他の例の処理について示した図である。
【0085】
図14において、ステップST1では、物体を運ぶ移動装置の速度関数を三角関数の級数と矩形関数との畳み込み積分で表す。ステップST2では、ステップST1で用いた三角関数の級数においてサイドローブが発生せず、且つ、畳み込み積分で得られた速度関数のフーリエ変換のスペクトル成分が特定の次数以上のサイドローブでは生じない係数a1等を求める。ステップST3では、事前に動かすことにより、又は、シミュレーションにより、物体の重量と移動装置における重心位置とから生じる複数の固有振動数を求めて、その中から最低固有振動数fminを求める。ステップST4では、ステップST3で求めた最低固有振動数fminがメインローブとサイドローブとの境界周波数よりも大きな値となる上の帯域となるように(言い換えると、ステップST3で求めた最低固有振動数fminよりも値が小さな周波数帯域にメインローブとサイドローブとの境界周波数が生じるように)、且つ、畳み込み積分で得られた関数のフーリエ変換の最低固有振動数fminが、成分があるサイドローブと成分がないサイドローブとの境界周波数よりも大きな値となる上の帯域となるように(言い換えると、ステップST3で求めた最低固有振動数fminよりも値が小さな周波数帯域に成分があるサイドローブと成分がないサイドローブとの境界周波数が生じるように)、加速時間(又は減速時間)を設定する。ステップST5では、得られた速度関数により移動装置の速度を制御して物体を運ぶ。なお、ロバスト制振制御装置としては、図8の時間設定部7がステップST4の設定処理を行い、制御部9がステップST5の制御処理を行えばよい。
【0086】
なお、得られた速度関数としては、(12)式のa1に1.2、a2に−0.2を入れて、加速時間taを設定することが一例として挙げられるが、a1とa2はこれに限られるものではない。
【0087】
また、速度関数を求めるためにg(t)として採用した三角次数の級数の次数も2に限定されのるものではなく、(9)式で表される一般化されたものであってもよい。なお、(9)式でkは1以上の整数である。
【0088】
図15はta=1.5secで最高速度が500[mm/s]の台形速度関数の場合を示す図であり、図16は(21)〜(23)式のa1=1.2、a2=−0.2をとり、ta=1.5secで最高速度が500[mm/s]の速度曲線で動かした場合を示す図である。図15では、四角で囲んだ部分からも分かるように、fm3が含まれる高域成分なないが、fm1とfm2がある1.5Hz〜2.3Hzに成分があるので揺れる。図16では、四角で囲んだ部分からも分かるように、1.54Hz以上の高域に成分がなく、fm1とfm2とfm3のいずれに対しても成分がないので揺れない。これらのことは、図15の関数に関して表した図17(A)に示す過渡応答と、図16の関数に関して表した図17(B)の過渡応答のグラフからも分かる。
【0089】
このような発明では、以下の点が特徴として挙げられる。まず、移動装置の固有振動数が広い範囲で変動しても振動(特に残留振動)を発生させることなく、移動装置の位置決め動作を行うことができる。特に、加速時間(若しくは減速時間)又は加減速時間の速度変化を数式によって求める手法なので、サーボパック、インバータなどの制御装置への実装が行い易い。また既存の制御装置へ速度指令として外部のPLC、マイコンボードなどの制御装置から指令を行うという手法もとることができて、既存の装置を大きく変更することなく有効利用できる。
【0090】
なお、上記実施の形態では、数式を使って根拠を明確にしながら制御装置、制御方法について説明したが、プログラムの発明、記録媒体の発明と捉えてもよい。
【符号の説明】
【0091】
5・・・制御装置、7・・・時間設定部、9・・・制御部
【特許請求の範囲】
【請求項1】
物体を運ぶ移動装置の速度を制御する制御方法であって、
前記移動装置は、前記物体の重量又は/及び前記移動装置における前記物体の重心位置が変化することによって固有振動数が変化するものであって前記変化する固有振動数の中に最小固有振動数fminが存在するものであり、
前記速度を示す速度関数v(t)は、加速時間、減速時間又は加減速時間において変化するものであるとともに、当該速度関数v(t)をフーリエ変換すると特定の周波数fc以上でそのスペクトル成分が0となるものであり、
前記特定の周波数fcが前記最小固有振動数fminよりも小さい値となる前記加速時間、前記減速時間又は前記加減速時間を設定する時間設定ステップと、
前記設定された時間において、時刻tを変化させて、前記移動装置の時刻tにおける速度を前記速度関数v(t)で制御する速度制御ステップとを含む、制御方法。
【請求項2】
前記速度関数v(t)は、フーリエ変換して得られるスペクトル分布にサイドローブを生じないものであり又は特定の次数以上のサイドローブを生じないものであり、
前記時間設定ステップにおいて、前記加減速時間又は前記加速時間若しくは前記減速時間の設定を行うことにより、前記スペクトル分布において、前記最小固有振動数fminよりも値が小さな周波数帯域に、メインローブとサイドローブとの間の境界周波数を生じさせ、又は、成分があるサイドローブと成分がないサイドローブとの間の境界周波数を生じさせるようにして、前記境界周波数を前記特定の周波数fcとする、請求項1記載の制御方法。
【請求項3】
前記移動装置は、前記物体を第1の地点から第2の地点へ運ぶものであり、
前記速度関数v(t)は、
前記第1の地点における移動開始時と前記第2の地点における移動終了時とにおける速度が0をとり前記第1の地点と前記第2の地点との間の中央位置での速度が最高速度をとり、且つ、前記第1の地点から前記中央位置までと前記中央位置から前記第2の地点までとが対称性がある三角関数の級数で表されるものであって、
当該三角関数の級数で表される前記速度関数v(t)をフーリエ変換して得られるスペクトル分布は、サイドローブが生じないものであり、
前記時間設定ステップにおいて、前記加減速時間の設定を行うことにより、前記最小固有振動数fminよりも値が小さな周波数帯域に前記スペクトル分布のメインローブとサイドローブとの間の境界周波数を前記特定の周波数fcとして生じさせる、請求項2記載の制御方法。
【請求項4】
前記速度関数v(t)は式(eq1)であり、
式(eq1)において、
前記第1の地点から前記第2の地点までの移動距離はdであり、
前記加減速時間はtcであり、
係数a1及びa2はa1+a2=1であって式(eq1)による前記速度関数v(t)をフーリエ変換してできるスペクトル分布のサイドローブが生じない係数値とされるものである、請求項3記載の制御方法。
【数1】
【請求項5】
前記移動装置は、前記物体を第1の地点から第2及び第3の地点を経由して第4の地点へ運ぶものであり、前記第1の地点から前記第2の地点までは加速し、前記第2の地点から前記第3の地点までは一定の速度vmaxをとり、前記第3の地点から前記第4の地点までは減速するものであり、
前記速度関数v(t)は、
三角関数の級数で表される関数g(t)と矩形関数h(t)との畳み込み積分で表されて一定の速度部分があり、
前記第1の地点における移動開始時と前記第4の地点における移動終了時とにおける速度が0をとり前記第1の地点から前記第2の地点までと前記第3の地点から前記第4の地点までとが対称性がある速度変化の関数で表されるものであり、
前記関数g(t)をフーリエ変換してできるスペクトル分布は、サイドローブが生じないものであり、
前記速度関数v(t)をフーリエ変換してできるスペクトル分布は、特定の次数以上のサイドローブが生じないものであり、
前記時間設定ステップにおいて、前記加速時間又は前記減速時間の設定を行うことにより、前記速度関数v(t)をフーリエ変換してできるスペクトル分布において前記最小固有振動数fminよりも小さな値の周波数帯域に成分が生じたサイドローブと成分が生じていないサイドローブとの間の境界周波数を前記特定の周波数fcとして生じさせるものである、請求項2記載の制御方法。
【請求項6】
前記速度関数v(t)は、加速時間0≦t≦taでは式(eq2)の関数で表され、ta≦t≦ta+tbではvmaxで一定であり、ta+tb≦t≦2ta+tbでは式(eq3)の関数で表されて加速とは対称形で減速するものであり、
式(eq2)、式(eq3)及び式(eq4)の係数a1及びa2はa1+a2=1であって式(eq4)式のg(t)をフーリエ変換してできるスペクトル分布のサイドローブが生じない係数値とすることにより、式(eq4)のg(t)と矩形関数との畳み込み積分で表される式(eq2)及び式(eq3)で特定される速度関数v(t)をフーリエ変換してできるスペクトル分布は、特定の次数以上のサイドローブが生じないものである、請求項5記載の制御方法。
【数2】
【請求項7】
前記係数a1は、ブラックマン窓関数の値以上である、請求項4又は6記載の制御方法。
【請求項8】
請求項1から7のいずれかに記載の制御方法をコンピュータに実行させるためのプログラム。
【請求項9】
請求項8記載のプログラムを記録したコンピュータが読み取り可能な記録媒体。
【請求項10】
物体を運ぶ移動装置の速度を制御する制御装置であって、
前記移動装置は、前記物体の重量又は/及び前記移動装置における前記物体の重心位置が変化することによって固有振動数が変化するものであって前記変化する固有振動数の中に最小固有振動数fminが存在するものであり、
前記速度を示す速度関数v(t)は、加速時間、減速時間、又は、加減速時間において変化するものであるとともに、当該速度関数v(t)のフーリエ変換が特定の周波数fc以上でそのスペクトル成分が0となるものであり、
前記特定の周波数fcが前記最小固有振動数fminよりも小さい値となる前記加速時間、前記減速時間、又は、前記加減速時間を設定する時間設定手段と、
前記設定された時間において、時刻tを変化させて、前記移動装置の時刻tにおける速度を速度関数v(t)で制御する速度制御手段とを備えた、制御装置。
【請求項1】
物体を運ぶ移動装置の速度を制御する制御方法であって、
前記移動装置は、前記物体の重量又は/及び前記移動装置における前記物体の重心位置が変化することによって固有振動数が変化するものであって前記変化する固有振動数の中に最小固有振動数fminが存在するものであり、
前記速度を示す速度関数v(t)は、加速時間、減速時間又は加減速時間において変化するものであるとともに、当該速度関数v(t)をフーリエ変換すると特定の周波数fc以上でそのスペクトル成分が0となるものであり、
前記特定の周波数fcが前記最小固有振動数fminよりも小さい値となる前記加速時間、前記減速時間又は前記加減速時間を設定する時間設定ステップと、
前記設定された時間において、時刻tを変化させて、前記移動装置の時刻tにおける速度を前記速度関数v(t)で制御する速度制御ステップとを含む、制御方法。
【請求項2】
前記速度関数v(t)は、フーリエ変換して得られるスペクトル分布にサイドローブを生じないものであり又は特定の次数以上のサイドローブを生じないものであり、
前記時間設定ステップにおいて、前記加減速時間又は前記加速時間若しくは前記減速時間の設定を行うことにより、前記スペクトル分布において、前記最小固有振動数fminよりも値が小さな周波数帯域に、メインローブとサイドローブとの間の境界周波数を生じさせ、又は、成分があるサイドローブと成分がないサイドローブとの間の境界周波数を生じさせるようにして、前記境界周波数を前記特定の周波数fcとする、請求項1記載の制御方法。
【請求項3】
前記移動装置は、前記物体を第1の地点から第2の地点へ運ぶものであり、
前記速度関数v(t)は、
前記第1の地点における移動開始時と前記第2の地点における移動終了時とにおける速度が0をとり前記第1の地点と前記第2の地点との間の中央位置での速度が最高速度をとり、且つ、前記第1の地点から前記中央位置までと前記中央位置から前記第2の地点までとが対称性がある三角関数の級数で表されるものであって、
当該三角関数の級数で表される前記速度関数v(t)をフーリエ変換して得られるスペクトル分布は、サイドローブが生じないものであり、
前記時間設定ステップにおいて、前記加減速時間の設定を行うことにより、前記最小固有振動数fminよりも値が小さな周波数帯域に前記スペクトル分布のメインローブとサイドローブとの間の境界周波数を前記特定の周波数fcとして生じさせる、請求項2記載の制御方法。
【請求項4】
前記速度関数v(t)は式(eq1)であり、
式(eq1)において、
前記第1の地点から前記第2の地点までの移動距離はdであり、
前記加減速時間はtcであり、
係数a1及びa2はa1+a2=1であって式(eq1)による前記速度関数v(t)をフーリエ変換してできるスペクトル分布のサイドローブが生じない係数値とされるものである、請求項3記載の制御方法。
【数1】
【請求項5】
前記移動装置は、前記物体を第1の地点から第2及び第3の地点を経由して第4の地点へ運ぶものであり、前記第1の地点から前記第2の地点までは加速し、前記第2の地点から前記第3の地点までは一定の速度vmaxをとり、前記第3の地点から前記第4の地点までは減速するものであり、
前記速度関数v(t)は、
三角関数の級数で表される関数g(t)と矩形関数h(t)との畳み込み積分で表されて一定の速度部分があり、
前記第1の地点における移動開始時と前記第4の地点における移動終了時とにおける速度が0をとり前記第1の地点から前記第2の地点までと前記第3の地点から前記第4の地点までとが対称性がある速度変化の関数で表されるものであり、
前記関数g(t)をフーリエ変換してできるスペクトル分布は、サイドローブが生じないものであり、
前記速度関数v(t)をフーリエ変換してできるスペクトル分布は、特定の次数以上のサイドローブが生じないものであり、
前記時間設定ステップにおいて、前記加速時間又は前記減速時間の設定を行うことにより、前記速度関数v(t)をフーリエ変換してできるスペクトル分布において前記最小固有振動数fminよりも小さな値の周波数帯域に成分が生じたサイドローブと成分が生じていないサイドローブとの間の境界周波数を前記特定の周波数fcとして生じさせるものである、請求項2記載の制御方法。
【請求項6】
前記速度関数v(t)は、加速時間0≦t≦taでは式(eq2)の関数で表され、ta≦t≦ta+tbではvmaxで一定であり、ta+tb≦t≦2ta+tbでは式(eq3)の関数で表されて加速とは対称形で減速するものであり、
式(eq2)、式(eq3)及び式(eq4)の係数a1及びa2はa1+a2=1であって式(eq4)式のg(t)をフーリエ変換してできるスペクトル分布のサイドローブが生じない係数値とすることにより、式(eq4)のg(t)と矩形関数との畳み込み積分で表される式(eq2)及び式(eq3)で特定される速度関数v(t)をフーリエ変換してできるスペクトル分布は、特定の次数以上のサイドローブが生じないものである、請求項5記載の制御方法。
【数2】
【請求項7】
前記係数a1は、ブラックマン窓関数の値以上である、請求項4又は6記載の制御方法。
【請求項8】
請求項1から7のいずれかに記載の制御方法をコンピュータに実行させるためのプログラム。
【請求項9】
請求項8記載のプログラムを記録したコンピュータが読み取り可能な記録媒体。
【請求項10】
物体を運ぶ移動装置の速度を制御する制御装置であって、
前記移動装置は、前記物体の重量又は/及び前記移動装置における前記物体の重心位置が変化することによって固有振動数が変化するものであって前記変化する固有振動数の中に最小固有振動数fminが存在するものであり、
前記速度を示す速度関数v(t)は、加速時間、減速時間、又は、加減速時間において変化するものであるとともに、当該速度関数v(t)のフーリエ変換が特定の周波数fc以上でそのスペクトル成分が0となるものであり、
前記特定の周波数fcが前記最小固有振動数fminよりも小さい値となる前記加速時間、前記減速時間、又は、前記加減速時間を設定する時間設定手段と、
前記設定された時間において、時刻tを変化させて、前記移動装置の時刻tにおける速度を速度関数v(t)で制御する速度制御手段とを備えた、制御装置。
【図7】

【図8】
【図10】
【図14】
【図18】
【図19】
【図20】
【図21】
【図1】
【図2】
【図3】
【図4】
【図5】
【図6】
【図9】
【図11】
【図12】
【図13】
【図15】
【図16】
【図17】
【図8】
【図10】
【図14】
【図18】
【図19】
【図20】
【図21】
【図1】
【図2】
【図3】
【図4】
【図5】
【図6】
【図9】
【図11】
【図12】
【図13】
【図15】
【図16】
【図17】
【公開番号】特開2012−240810(P2012−240810A)
【公開日】平成24年12月10日(2012.12.10)
【国際特許分類】
【出願番号】特願2011−114021(P2011−114021)
【出願日】平成23年5月20日(2011.5.20)
【出願人】(000196705)西部電機株式会社 (80)
【Fターム(参考)】
【公開日】平成24年12月10日(2012.12.10)
【国際特許分類】
【出願日】平成23年5月20日(2011.5.20)
【出願人】(000196705)西部電機株式会社 (80)
【Fターム(参考)】
[ Back to top ]