
制御監視システム及び制御監視方法
この発明は、ターボジェット逆スラスト装置の状態を検出するための複数のセンサー(30)と、制御監視演算手段(24)と、制御ユニットを介して複数のセンサーから演算手段へ供給された情報の関数として演算手段によって制御される逆スラスト装置のための制御ユニット(26)と、制御ユニットを介して複数のセンサーから演算手段へ供給された情報の関数として演算手段によって制御されるターボジェット調節装置(28)と、からなる制御監視システム(22)に関する。また、この発明は、制御監視システムを用いるターボジェットの制御と監視を行う方法に関する。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、特にターボジェットに適用される制御監視システム及び制御監視方法に関する。
【背景技術】
【0002】
多くの航空機、特に民間輸送機向けに設計された航空機は、着陸時の航空機の制動を向上するために逆スラスト装置を備えている。逆スラスト装置は航空機のエンジンに関わって、非作動収納ポジションから展開作動ポジションに、反対に展開作動ポジションから非作動収納ポジションに変更するよう命令を受けることができる。展開作動ポジションにおいては、逆スラスト装置は関係するエンジンからジェットを受け、そのジェットを逆転しこれにより航空機の制動に寄与する。
【0003】
一般に、航空機のエンジンは逆スラスト装置が取り付けられている。エンジンの逆スラスト装置は、パイロットが関係するエンジンのためのスロットルレバーに取り付けられた制御レバーを操作することによって作動される。このレバーは、スロットルレバーが低速で動作をしているエンジンに対応するポジションあるときにのみ作動可能である。
【0004】
欧州特許(A)1512627号(米国特許(B)7107757号)には、それぞれのエンジンに関係するスロットルによってアイドリングとフルスピードの間を別々に制御される複数のエンジンが取り付けられた航空機が開示されている。複数の特定のエンジンは、非作動の収納ポジションから展開された作動ポシションへ、反対に展開された作動ポシションから非作動の収納ポジションへ制御できる逆スラスト装置を備え、他の複数のエンジンは、逆スラスト装置を備えない。1個の安全装置が備えられ、逆スラスト装置が非作動の収納ポジションから展開された作動ポシションに移行する制御がなされた時に逆スラスト装置のないエンジンに対応するスロットルが、少なくともアイドリング対応するポジションを越えるような操作を無効にする。この文献には、逆スラスト装置を含む複数のターボジェットの制御が、逆スラスト装置の状態との関係でどのように管理されるのかについては、記載がない。
【0005】
欧州特許(A)0843089号は、航空機搭載のターボジェットエンジン逆スラスト装置であって、逆転装置が収納ポジションと展開ポシション間を動く少なくとも1個の構成部品を有する逆スラスト装置のための電子制御システムが開示している。該システムは、逆スラスト装置の収納ポジションと展開ポシション間を、可動部品を動かす少なくとも1組の電気機械駆動装置を含む。また、該システムは、電気機械駆動装置を制御するための電子制御ユニットを含み、該ユニットは、ターボジェット電子調節システムに電気的に接続されている。該ユニットは、先ず、電子調節システムから出される可動部品収納・展開命令を電気機械駆動装置のための命令のシーケンスに変換し、次に、駆動装置の状態と可動部品のポジションについて常に電子調節システムに情報を提供するように設計される。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】欧州特許(A)1512627号明細書(米国特許(B)7107757号明細書)
【特許文献2】欧州特許(A)0843089号明細書
【発明の概要】
【発明が解決しようとする課題】
【0007】
このシステムにおいては、複数のセンサーからの情報は、電子制御ユニットを介して調節システムに供給される。ここで問題点は、ユニットとターボジェット調節システム互換性を持つ必要があり、特に調節システムは電子制御ユニットの進化に追随することが求められ、それが制御システムを複雑にする。
【0008】
したがって、ターボジェットと使用するためのより単純な制御監視システムの必要性がある。本発明は、単純なシステムであり、システムの構築または保守する時に有利な制御監視システム及び制御監視方法を実現することを目的とする。
【課題を解決するための手段】
【0009】
この目的を達成するために、
ターボジェット逆スラスト装置の状態を検出するための複数のセンサーと、
制御監視演算手段と、
制御ユニットを介して複数のセンサーから演算手段へ供給された情報の関数として演算手段によって制御される逆スラスト装置のための制御ユニットと、
制御ユニットを介して複数のセンサーから演算手段へ供給された情報の関数として演算手段によって制御されるターボジェット調節装置と、からなることを特徴とする制御監視システム、を提供する。
【0010】
一実施例において、制御監視演算手段は逆スラスト装置への電源供給を制御するようにされる。
【0011】
一実施例において、制御監視演算手段は、逆スラスト装置への電源供給を制御するためのユニット、逆スラスト装置の状態の変化を制御するためのユニット及びターボジェットの調節を制御するためのユニットからなるグループから選ばれた複数のユニットを含む。
【0012】
一実施例において、複数の状態センサーは調節装置に情報を供給するようにされる。
【0013】
一実施例において、調節装置は、演算手段にターボジェット動作情報を供給するようにされる。
【0014】
少なくとも1個の逆スラスト装置が付いたターボジェットと、
上記のシステムであって、ターボジェットの制御と監視を行うシステム、からなる航空機も提供される。
【0015】
複数の状態センサーからの逆スラスト装置の状態情報を制御ユニットを介して演算手段に伝送する工程と、
演算手段を用いて、制御ユニットをこの情報の関数として制御する工程と、
演算手段を用いて、調節装置をこの情報の関数として制御する工程と、を含む上記記載のシステムを用いるターボジェットにおいて制御と監視を行うための方法が提供される。
【0016】
一実施例において、演算手段を用いて、逆スラスト装置への電源供給を制御する工程、をさらに含む。
【0017】
さらに一実施例において、この方法は
複数の状態センサーによる逆スラスト装置の状態情報を調節装置に伝送する工程と、
調節装置を用いて、複数の状態センサーから受け取った情報と演算手段から受け取った指令との間の一致をチェックする工程を含む。
【0018】
さらに一実施例において、調節装置を用いて、ターボジェットの動作情報を演算手段に供給する工程を含む。
【発明の効果】
【0019】
このシステムにより、制御ユニットと調節装置は互いに接続されていなくてもよい。これにより制御ユニットと調節装置は互いに互換性を持たせる必要がなくなる。このことは、個々の装置を他のものから切り離して考慮できるので、システムを構築または保守する時に有利である。本システムは航空機のターボジェットに適用できる。本システムは更にシンプルである。
【図面の簡単な説明】
【0020】
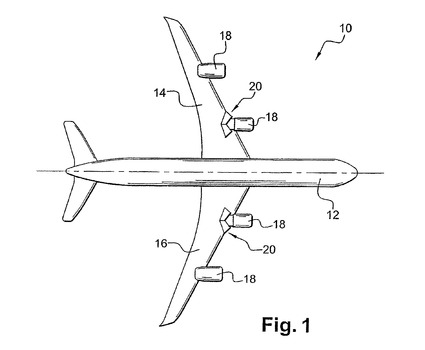
【図1】航空機の略図である。
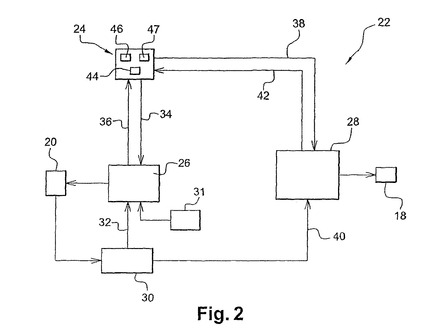
【図2】制御監視システムのブロック図である。
【発明を実施するための形態】
【0021】
複数のターボジェット逆スラスト装置状態感知センサーと制御監視演算手段を含む制御監視システムを提供する。また、本システムは逆スラスト装置のための制御ユニットとターボジェット調節装置を含む。制御ユニットは、制御ユニットから演算手段に供給されたセンサー情報の関数として、演算手段により制御される。調節装置は、制御ユニットを介して演算手段に供給されるセンサー情報の関数として、演算手段により制御される。このシステムにより、制御ユニットと調節装置は互いに接続されていなくてもよい。これにより制御ユニットと調節装置は互いに互換性を持たせる必要がなくなる。このことは、個々の装置を他のものから切り離して考慮できるので、システムを構築または保守する時に有利である。本システムは航空機のターボジェットに適用できる。本システムは更にシンプルである。
【0022】
本発明の更なる特徴と利点は、添付の図面を参照して、例としてのみ掲げる本発明の幾つかの実施例の詳細な説明を読めば、更に明らかになるであろう。
【実施例】
【0023】
図1は胴体12と、胴体12について対称な2つの翼14、16を有する航空機10の略図である。ターボジェット18は翼14、16のおのおのに搭載される。図1は単に例示の目的で、翼1つにつき2個のターボジェット18が搭載された例を示す。翼1つに付き1個のターボジェット18を搭載することも可能である。
【0024】
翼1つにつき少なくとも1つのターボジェットが逆スラスト装置20を備える。逆スラスト装置20は、非作動収納ポジションから展開作動ポジションに、またその逆に変えることができる。展開作動ポジションにおいて、逆スラスト装置20は関係するターボジェットからジェットを受け、そのジェットを反転させる。これにより、逆スラスト装置20が航空機の制動に関与する。例として、逆スラスト装置20は傾斜ドア型逆スラスト装置の形状をなすが、異なる構造を持つこともできる。図1は展開したポシションにある逆スラスト装置20を示す。
【0025】
各逆スラスト装置20は、図示しない駆動装置により作動される。駆動装置は、非可逆式の電動式リニアアクチュエータを含み、ドアを支持するための一次ロックと呼ばれる電気ロックを少なくとも1個含んでもよい。リニアアクチュエータは、制御ユニット26により制御される電動モータで作動させることができる。
【0026】
図2は、制御監視システム22のブロック図である。本システム22は1ないし複数個のターボジェットを制御することができる。ターボジェット制御には、ターボジェットの出力調節を含む複数のターボジェット動作パラメータの制御及び逆スラスト装置20の動作の制御をも含むことができる。より具体的には、制御監視システム22は、例えば、ターボジェットの出力を逆スラスト装置20のポジションの関数として管理することを可能とし、これにより、逆スラスト装置20がポジションを変えるプロセスにあってターボジェットが最大出力となるような危険な操縦上の状況を回避することが可能となる。以下、システム22について1個の単一ターボジェットとの関係で説明するが、1個以上のターボジェットの制御と監視も可能である。
【0027】
図2において、制御監視システム22は制御監視演算手段24を含むことができる。また、制御監視システム22は、ターボジェット18の逆スラスト装置20を制御するための制御ユニット26、ターボジェット18を調節するためのデバイス28を含むことができる。更に、制御監視システム22は、逆スラスト装置20の状態を検知するための複数のセンサー30を含む。システム22は、航空機に搭載の逆スラスト装置付きターボジェットの数の分だけの制御ユニット26と調節装置28を含むこととなる。
【0028】
複数のセンサー30は逆スラスト装置20のポジション検出することを可能にする。すなわち、より一般的には、逆スラスト装置20の状態を検知することを可能にする。各逆スラスト装置20は、関係する逆スラスト装置20の状態検知するための複数のセンサー30を備える。複数のセンサー30は近接センサーまたはポジションセンサーでもよい。複数のセンサー30からの情報は逆スラスト装置の展開された状態または収納された状態に関する情報とすることができる。複数のセンサーからの情報は、進行中の状態の変化に関するとすることもできる。複数のセンサーからの情報は制御監視演算手段24によって処理される。他の複数のセンサー31は制御ユニット26に情報を供給し、それを随時演算手段24に伝送することができる。これらは例えば、ロック手段上の複数のセンサーであってもよい。
【0029】
1個の制御監視演算手段24はエンジン1個につきを備えることができる。制御監視演算手段24は航空機の全てのターボジェットを制御するようにすることもできる。このように、全てのターボジェット18を制御するために1個の演算手段24が航空機に備えられる。制御監視演算手段24は、航空機のコクピット内におくことができ、全てのターボジェット18を集中的に制御する。航空機システムのレベルで演算手段を備える意義は、出された全ての指令、航空機のフライト状態や逆スラスト装置の状態に関する情報が、パイロットからの指令に関わらず異なる性格の情報毎に集積されることである。演算手段24は、演算手段24のさまざまな機能を実行する複数のユニットを含むことができる。あるユニット44は、逆スラスト装置の状態の変化を制御する機能を実行することができる。別のユニット46は、逆スラスト装置への電源供給を制御する機能を実行することができる。更に別のユニット47は、ターボジェットの調節を制御する機能を実行することができる。複数のユニットを備える意義は、安全目標を満たし、逆スラスト装置が動作範囲を越えて展開しないように確実にすることである。
【0030】
制御ユニット26は、逆スラスト装置20を制御することを可能にする。具体的には、制御ユニット26は、逆スラスト装置20のポジションの変化を制御することを可能にする。制御ユニット26は、逆スラスト装置20の状態の変化、すなわち、非使用の収納された状態から展開された使用状態への変化を制御し、その逆も制御する。1個の制御ユニット26が各逆スラスト装置20に関連づけられ、制御ユニット26は航空機の翼に、関係する逆スラスト装置に近接して置かれることが好ましい。制御ユニット26は、複数のセンサー30からの逆スラスト装置20の情報を受け取る。この情報は、逆スラスト装置20の状態に関し、逆スラスト装置20の展開または収納された状態であると同時に逆スラスト装置20が変更状態の過程にある事実のみに関する情報である。図2において、矢印32は複数のセンサーから制御ユニット26への情報30の流れを示す。複数のセンサーからの情報30は制御ユニット26に集中される。この情報は次に、制御ユニット26によって制御監視演算手段24に中継される。図2において、制御ユニット26から制御監視演算手段24への情報の伝送は矢印36で示される。このように、複数のセンサーからの情報は、制御ユニット26によって制御監視演算手段24によって直接伝送される。このことは、複数のセンサー30によって供給される情報が、制御監視演算手段24に即座により速く伝送されるという利点を提供する。制御ユニット26から制御監視演算手段24まで複数のセンサーからの情報が調節装置28を介さずに直接供給されるという事実は、調節装置28の簡素化が可能であることを意味する。事実、調節装置28はもはや制御ユニット26と制御監視演算手段24間の情報伝達の機能を果たさないので、調節装置28に現れるアルゴリズムの数を減らすことが可能である。アルゴリズムのための入力データは航空機/セルレベルにあって制御監視演算手段24によって直接処理される。またこの事は、データ伝送のための配線接続の簡素化と制御・監視アーキテクチャの簡素化に役立つ。
【0031】
制御ユニット26は制御監視演算手段24により制御される。制御監視演算手段24は制御ユニット26に指令を送り、制御ユニット26が逆スラスト装置20の動作を制御する。具体的には、制御監視演算手段24は、逆スラスト装置20の状態の変更を開始しようとするパイロットの意図を検出する。すると制御監視演算手段24は制御ユニット26を介して逆スラスト装置20の状態の変更を開始する。図2の矢印34は、制御監視演算手段24によって制御ユニット26に送られた指令を示す。演算手段24は、制御ユニット26に送る指令を定式化するために、パイロットのがわの動作を複数のセンサー30から発せられる情報と結合する。このことは、演算手段24から送られる指令によって航空機の操縦安全に役立つ逆スラスト装置のポジションに関わる知見が作り上げられることを意味する。制御ユニット26に送られる指令は、主として逆スラスト装置20の展開または収納を開始する。指令を受け取ると、制御ユニット26は、指令を制御シーケンスに変換する。この制御シーケンスは、逆スラスト装置の動作メンバー及びロックによってデコードされる一連の信号である。例えば、制御ユニット26は、逆スラスト装置のドアリニアアクチュエータを動かす電動モータに、速度制御情報を送る。
【0032】
演算手段24から受け取った指令が、複数のセンサー30から受け取った情報に従って有効であるか、制御ユニット26にチェックさせることも可能である。これは補助的な安全手段を提供する。
【0033】
このようなアーキテクチャにおいては、制御ユニット26は制御・監視コンピュータ24と直接インターフェースで接続する。すなわち、制御ユニット26は制御監視演算手段24とフルにコミュニケーションを保っている。もはや、調節装置28は制御ユニット26と制御・監視コンピュータ24との間には介在せず、制御ユニット26に権限を有するのは演算手段24である。調節装置28が制御ユニット26に物理的に近接している観点からターボジェット調節装置28を介して演算手段24から出る指令を受け取るという当然の流れを反映した欧州特許(A)0843089号とはことなり、本願アーキテクチャは、これら2個の装置の統合と互換性に縛られることはない。このことは特にこれらの装置を互いに別々に考慮可能であるから、制御ユニット26と調節装置28の製作とメンテナンスを簡素化できる。
【0034】
更なる利点としては、制御ユニット26に決定的に適用することを減らすことができることである。すなわち、制御ユニット26は、何ら中間の媒介なく制御監視演算手段24に従属し、制御ユニット26は今や演算手段24の直接制御下に存在する。演算手段24による制御ユニット26の動作の制御及び監視がより厳しくなり、制御ユニット26の自律性要件を削減に寄与する。その結果、制御ユニット26は、性能レベルの削減により、より安価な構成部品となりうる。
【0035】
また、制御ユニット26と制御監視演算手段24間の媒介としての調節装置28の存在に拘束されない結果、システムの低下をより速く検出することができる。事実、制御ユニット26、逆スラスト装置または動作メンバー低下状態を演算手段24により速く検出できる。システム低下を検出する負担はもはや調節装置28によるスポートを要せず、このことで、前記のようにその製造及びメンテナンスを容易に行うことができる。
【0036】
ターボジェットの調節は調節装置28によって行われる。すなわち、調節装置28がターボジェットに働きかけその出力を調節する。調節装置28は全自動デジタルエンジンコントロール(FADEC)を可能とする。それぞれのターボジェットに1個の調節装置28が関係することが望ましい。調節装置28からの出力信号はターボジェットの出力の制御に適している。
【0037】
調節装置28は、複数のセンサーからの情報30と演算手段24からの情報を考慮し、ターボジェットの出力を調節する。制御監視演算手段24は、調節装置28がターボジェットの出力調節するための指令を送る。制御監視演算手段24は、調節装置28を介してターボジェットの出力の調節を開始する。図2の矢印38は、制御監視演算手段24によって調節装置28に送られる指令を示す。より正確には、演算手段24は、制御ユニット26によって演算手段24に供給された複数のセンサーからの情報を考慮しながら、調節装置を制御する。演算手段24は、調節装置28の送る指令に定式化するために、パイロットの側の挙動と複数のセンサー30から出される情報を処理する。このことは、逆スラスト装置20のポジションの関数としてターボジェットの出力を調節することが可能とする。事実、例えば、逆スラスト装置20がポジションを変更する過程にある場合、調節装置28がターボジェットに最大出力を強制する可能があってはならない。これは、逆スラスト装置20にダメージを与える危険性がある。逆スラスト装置20の遷移中は、ターボジェットは反対に、低出力にセットされる。このように、演算手段24による制御は、逆スラスト装置20のポジションに関わる知見として得られ、航空機の操縦上の安全として役立つ。
【0038】
このようなアーキテクチャにおいては、調節装置28はターボジェットを調節するための制御監視演算手段24と直接インターフェースで接続される。制御ユニット26と調節装置28は並列に制御される。すなわち、異なるリンク上にある。調節装置28は制御ユニット26から情報を直接受け取ることはない。制御ユニット26と調節装置28は互いにフルコミュニケーションの状態にはない。調節装置28は、演算手段24と制御ユニット26間のリンクの外にある。このことは、制御ユニット26と調節装置28に同じ規格とコミュニケーションプロトコル適用する必要に拘束されることはないということを意味する。制御ユニット26と調節装置28のいずれか一方だけでも、規格またはコミュニケーションプロトコル変更または改良することができる。
【0039】
このようなアーキテクチャにおいては、調節装置28に臨界負荷をかけることを減らすことができる。すなわち、調節装置28は制御ユニット26を制御しないので、制御ユニット26の制御の機能は演算手段24に割り当てられる。このことは、逆スラスト装置の運転に関して調節装置28に加えられる権限と自律要件を減らすことに寄与する。その結果、調節装置28は、ハードウェアの観点からは、入出力の少ない構成部品とすることができる。
【0040】
調節装置28が、複数の逆スラスト装置状態感知センサー30から情報を受け取るようにすることもできる。図2の矢印40は、これを図式的にしめす。このように、調節装置28は制御監視演算手段24から受け取った指令と逆スラスト装置の状態の間の調和をチェックすることができる。このことで更に安全手段得られる。
【0041】
調節装置28は、制御監視演算手段24にターボジェットの運転情報を送ることができる。図2の矢印42はこれを示す。調節装置28により供給される情報は、例えば、ターボジェットの運転速度ないし温度、ターボジェットの故障ないし機能不良に関する情報である。このことは演算手段24にターボジェットの運転に関するよりよい知見を提供し、これにより運転の制御に有利に働くことができる。
【0042】
システム22の様々な構成要素を例えば、AFDX(Avionics Full Duplex)ネットワークによって一緒に接続することができる。これは、航空機用の内部コミュニケーションメディアとして設計された、冗長性を有するイーサネット(登録商標)の高い信頼性を備えるネットワークである。システムネットワーク利用性に対する需要を満たすために、AFDXネットワークは物理的に冗長性を有し、システム22の各要素は2つの異なるチャンネルでメッセージを送る。これにより、伝送不良とハードウェアの故障に関わる問題を減らすことができる。
【0043】
制御監視演算手段24は逆スラスト装置の動作の同期を提供する。同期を取ることは、独自の入力を持つモータごとに同じアルゴリズムをもつ演算手段24の使用にとって望ましいものである。
【0044】
上記の一次ロックとは別に、システム22は、高度な航空機の安全手段を提供する1ないし数個の別のロック含むことができる。2次ロックの手段として、システム22は、逆スラスト装置の動作メンバーに適用されるブレーキを含むことができる。ブレーキは、例えば、逆スラスト装置のアクチュエータを駆動する電動モータないしアクチュエータそのものを適用することができる。この2次ロックは、逆スラスト装置のドアが一次ロックの不良をサポートするように設計される。2次ロックは、制御ユニット26により制御することができる。2次ロックの存在とは独立して、システム22は、別のロック不良が生じても、ドアを維持できる第3のロックを含むことができる。この第3のロックは、コクピットから直接制御される。第3のロックは、逆スラストレバーを介して直接制御が可能である。第3のロックは、演算手段24以外の演算手段によっても制御可能である。これら他の演算手段は、逆スラストレバーと航空機のフライトパラメータに従属して動作することができる。複数のセンサーは、これらのロックの状態の関する情報を供給することが可能である。
【0045】
また、システム22は、システムの様々な構成要素に電気的出力の分配をするのを制御することができる。出力供給を遮断することは、例えば特にフライト中であれば、極めて重大な結果をもたらす逆スラスト装置の予期しない展開を回避するには利点がある。出力供給を遮断することは、補助的な 安全手段である。制御監視演算手段24は、逆スラスト装置20、特に逆スラスト装置20の動作メンバー、(例えば、リニアアクチュエータを動作させる電動モータ)への電源供給を管理することができる。演算手段24は、逆スラスト装置20の動作メンバーへの電気出力を供給または遮断するポジションにある。動作メンバーへの電気出力の遮断は、制御監視演算手段24によって制御ユニット26を介して直接行うことができる。また、制御監視演算手段24は制御ユニット26への電源供給を管理することができ、特に、演算手段24は、制御ユニット26が不正常な挙動をしているときには、制御ユニット26への電源供給を遮断することができる。
【0046】
制御監視システム22を用いたターボジェットにおける制御及び監視の方法は、制御ユニット26を介して複数のセンサー30による逆スラスト装置20の状態に関する情報を演算手段24伝送することを含むことができる。この方法は、かかる情報に基づいて、演算手段24による制御ユニット26の制御と監視を行い、ついでこの情報と関わりなく演算手段24を用いて調節装置28を制御することを含むことができる。この方法においては、制御ユニット26及び調節装置28おのおのの制御は平行して行われ、演算手段24のみが、制御ユニット26及び調節装置28の一方または他方にたいして権限を有する。ここで、上記の様々な利点が適用できる。
【0047】
ここで、動作の一例を説明する。ここでは、逆スラスト装置の展開に関して説明するが、逆スラスト装置の収納も同様の方法で動作できる。先ず、必要があれば、第3のロックがアンロックされる。アンロックが有効になると即座に、第3のロックに関係する複数のセンサーが、選択的に制御ユニット26を介して、演算手段24に通知する。演算手段24において、最初の一連の事象を行うことができる。演算手段24(より具体的にはそのユニット46)は、選択的に制御ユニット26を介して動作メンバー、具体的にはアクチュエータを作動するモータに出力を開始する。動作メンバーへの出力が有効になると、演算手段24(より具体的にはそのユニット44)が制御ユニット26に展開指令を送る。これに引き続き、制御ユニット26にて第2の一連の事象が開始することができる。演算手段24から指令を受け取ると、制御ユニット26は2次ロックにアンロックを命じる。2次ロックに関係する複数のセンサーが2次ロックのアンロック有効であることを検出すると即座に制御ユニット26に伝送される。この情報を受け取ると、制御ユニット26は一次ロックをアンロックする。1次ロックに関係する複数のセンサーが1次ロックのアンロック有効であることを検出すると即座に制御ユニット26に伝送される。この情報を受け取ると、制御ユニット26はアクチュエータ駆動モータを動作させて、逆スラスト装置のドアを開けることを命じる。逆スラスト装置の状態を検知する複数のセンサー30が、ドアが開かれたことを検出すると即座に、情報の内容が制御ユニット26に伝送される。この情報は演算手段24まで伝送される。演算手段24は電気出力を遮断する。電気出力の遮断によって、逆スラスト装置のドアと逆ジェットがロックされる。演算手段24は、調節装置28にターボジェットの出力を調節するように指令を出す。調節装置28は、航空機の制動を強めるためにターボジェットのアクセルを始動する。逆スラスト装置のドアの開放に関する情報を演算手段24から受け取った指令と係る情報を比較できるポジションにある調節装置28に直接伝送することも可能である。
【0048】
上記において、複数のセンサーは、諸事象の最終状態に関する情報を発するポジションばかりでなく、これらの事象の進行状態に関する情報を発するポジションにおくこともできる。逆スラスト装置のドアの展開の制御に更に役立つ。また、複数のセンサーからの情報の全てまたはその一部のみを演算手段に伝送することもできる。特に、一次ロックの状態が制御ユニットレベルある場合は、第2及び第3のロックの状態に関する情報を演算手段に伝送することもできる。入出力に関するハードウェアのオーバーヘッドを少なくすることができる。
【産業上の利用可能性】
【0049】
この発明は、ターボジェットを搭載した輸送機器に適用することができる。
【符号の説明】
【0050】
10 航空機
18 ターボジェット
20 逆スラスト装置
22 制御監視システム
24 制御監視演算手段
26 制御ユニット
28 ターボジェット調節装置
30 センサー
【技術分野】
【0001】
本発明は、特にターボジェットに適用される制御監視システム及び制御監視方法に関する。
【背景技術】
【0002】
多くの航空機、特に民間輸送機向けに設計された航空機は、着陸時の航空機の制動を向上するために逆スラスト装置を備えている。逆スラスト装置は航空機のエンジンに関わって、非作動収納ポジションから展開作動ポジションに、反対に展開作動ポジションから非作動収納ポジションに変更するよう命令を受けることができる。展開作動ポジションにおいては、逆スラスト装置は関係するエンジンからジェットを受け、そのジェットを逆転しこれにより航空機の制動に寄与する。
【0003】
一般に、航空機のエンジンは逆スラスト装置が取り付けられている。エンジンの逆スラスト装置は、パイロットが関係するエンジンのためのスロットルレバーに取り付けられた制御レバーを操作することによって作動される。このレバーは、スロットルレバーが低速で動作をしているエンジンに対応するポジションあるときにのみ作動可能である。
【0004】
欧州特許(A)1512627号(米国特許(B)7107757号)には、それぞれのエンジンに関係するスロットルによってアイドリングとフルスピードの間を別々に制御される複数のエンジンが取り付けられた航空機が開示されている。複数の特定のエンジンは、非作動の収納ポジションから展開された作動ポシションへ、反対に展開された作動ポシションから非作動の収納ポジションへ制御できる逆スラスト装置を備え、他の複数のエンジンは、逆スラスト装置を備えない。1個の安全装置が備えられ、逆スラスト装置が非作動の収納ポジションから展開された作動ポシションに移行する制御がなされた時に逆スラスト装置のないエンジンに対応するスロットルが、少なくともアイドリング対応するポジションを越えるような操作を無効にする。この文献には、逆スラスト装置を含む複数のターボジェットの制御が、逆スラスト装置の状態との関係でどのように管理されるのかについては、記載がない。
【0005】
欧州特許(A)0843089号は、航空機搭載のターボジェットエンジン逆スラスト装置であって、逆転装置が収納ポジションと展開ポシション間を動く少なくとも1個の構成部品を有する逆スラスト装置のための電子制御システムが開示している。該システムは、逆スラスト装置の収納ポジションと展開ポシション間を、可動部品を動かす少なくとも1組の電気機械駆動装置を含む。また、該システムは、電気機械駆動装置を制御するための電子制御ユニットを含み、該ユニットは、ターボジェット電子調節システムに電気的に接続されている。該ユニットは、先ず、電子調節システムから出される可動部品収納・展開命令を電気機械駆動装置のための命令のシーケンスに変換し、次に、駆動装置の状態と可動部品のポジションについて常に電子調節システムに情報を提供するように設計される。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】欧州特許(A)1512627号明細書(米国特許(B)7107757号明細書)
【特許文献2】欧州特許(A)0843089号明細書
【発明の概要】
【発明が解決しようとする課題】
【0007】
このシステムにおいては、複数のセンサーからの情報は、電子制御ユニットを介して調節システムに供給される。ここで問題点は、ユニットとターボジェット調節システム互換性を持つ必要があり、特に調節システムは電子制御ユニットの進化に追随することが求められ、それが制御システムを複雑にする。
【0008】
したがって、ターボジェットと使用するためのより単純な制御監視システムの必要性がある。本発明は、単純なシステムであり、システムの構築または保守する時に有利な制御監視システム及び制御監視方法を実現することを目的とする。
【課題を解決するための手段】
【0009】
この目的を達成するために、
ターボジェット逆スラスト装置の状態を検出するための複数のセンサーと、
制御監視演算手段と、
制御ユニットを介して複数のセンサーから演算手段へ供給された情報の関数として演算手段によって制御される逆スラスト装置のための制御ユニットと、
制御ユニットを介して複数のセンサーから演算手段へ供給された情報の関数として演算手段によって制御されるターボジェット調節装置と、からなることを特徴とする制御監視システム、を提供する。
【0010】
一実施例において、制御監視演算手段は逆スラスト装置への電源供給を制御するようにされる。
【0011】
一実施例において、制御監視演算手段は、逆スラスト装置への電源供給を制御するためのユニット、逆スラスト装置の状態の変化を制御するためのユニット及びターボジェットの調節を制御するためのユニットからなるグループから選ばれた複数のユニットを含む。
【0012】
一実施例において、複数の状態センサーは調節装置に情報を供給するようにされる。
【0013】
一実施例において、調節装置は、演算手段にターボジェット動作情報を供給するようにされる。
【0014】
少なくとも1個の逆スラスト装置が付いたターボジェットと、
上記のシステムであって、ターボジェットの制御と監視を行うシステム、からなる航空機も提供される。
【0015】
複数の状態センサーからの逆スラスト装置の状態情報を制御ユニットを介して演算手段に伝送する工程と、
演算手段を用いて、制御ユニットをこの情報の関数として制御する工程と、
演算手段を用いて、調節装置をこの情報の関数として制御する工程と、を含む上記記載のシステムを用いるターボジェットにおいて制御と監視を行うための方法が提供される。
【0016】
一実施例において、演算手段を用いて、逆スラスト装置への電源供給を制御する工程、をさらに含む。
【0017】
さらに一実施例において、この方法は
複数の状態センサーによる逆スラスト装置の状態情報を調節装置に伝送する工程と、
調節装置を用いて、複数の状態センサーから受け取った情報と演算手段から受け取った指令との間の一致をチェックする工程を含む。
【0018】
さらに一実施例において、調節装置を用いて、ターボジェットの動作情報を演算手段に供給する工程を含む。
【発明の効果】
【0019】
このシステムにより、制御ユニットと調節装置は互いに接続されていなくてもよい。これにより制御ユニットと調節装置は互いに互換性を持たせる必要がなくなる。このことは、個々の装置を他のものから切り離して考慮できるので、システムを構築または保守する時に有利である。本システムは航空機のターボジェットに適用できる。本システムは更にシンプルである。
【図面の簡単な説明】
【0020】
【図1】航空機の略図である。
【図2】制御監視システムのブロック図である。
【発明を実施するための形態】
【0021】
複数のターボジェット逆スラスト装置状態感知センサーと制御監視演算手段を含む制御監視システムを提供する。また、本システムは逆スラスト装置のための制御ユニットとターボジェット調節装置を含む。制御ユニットは、制御ユニットから演算手段に供給されたセンサー情報の関数として、演算手段により制御される。調節装置は、制御ユニットを介して演算手段に供給されるセンサー情報の関数として、演算手段により制御される。このシステムにより、制御ユニットと調節装置は互いに接続されていなくてもよい。これにより制御ユニットと調節装置は互いに互換性を持たせる必要がなくなる。このことは、個々の装置を他のものから切り離して考慮できるので、システムを構築または保守する時に有利である。本システムは航空機のターボジェットに適用できる。本システムは更にシンプルである。
【0022】
本発明の更なる特徴と利点は、添付の図面を参照して、例としてのみ掲げる本発明の幾つかの実施例の詳細な説明を読めば、更に明らかになるであろう。
【実施例】
【0023】
図1は胴体12と、胴体12について対称な2つの翼14、16を有する航空機10の略図である。ターボジェット18は翼14、16のおのおのに搭載される。図1は単に例示の目的で、翼1つにつき2個のターボジェット18が搭載された例を示す。翼1つに付き1個のターボジェット18を搭載することも可能である。
【0024】
翼1つにつき少なくとも1つのターボジェットが逆スラスト装置20を備える。逆スラスト装置20は、非作動収納ポジションから展開作動ポジションに、またその逆に変えることができる。展開作動ポジションにおいて、逆スラスト装置20は関係するターボジェットからジェットを受け、そのジェットを反転させる。これにより、逆スラスト装置20が航空機の制動に関与する。例として、逆スラスト装置20は傾斜ドア型逆スラスト装置の形状をなすが、異なる構造を持つこともできる。図1は展開したポシションにある逆スラスト装置20を示す。
【0025】
各逆スラスト装置20は、図示しない駆動装置により作動される。駆動装置は、非可逆式の電動式リニアアクチュエータを含み、ドアを支持するための一次ロックと呼ばれる電気ロックを少なくとも1個含んでもよい。リニアアクチュエータは、制御ユニット26により制御される電動モータで作動させることができる。
【0026】
図2は、制御監視システム22のブロック図である。本システム22は1ないし複数個のターボジェットを制御することができる。ターボジェット制御には、ターボジェットの出力調節を含む複数のターボジェット動作パラメータの制御及び逆スラスト装置20の動作の制御をも含むことができる。より具体的には、制御監視システム22は、例えば、ターボジェットの出力を逆スラスト装置20のポジションの関数として管理することを可能とし、これにより、逆スラスト装置20がポジションを変えるプロセスにあってターボジェットが最大出力となるような危険な操縦上の状況を回避することが可能となる。以下、システム22について1個の単一ターボジェットとの関係で説明するが、1個以上のターボジェットの制御と監視も可能である。
【0027】
図2において、制御監視システム22は制御監視演算手段24を含むことができる。また、制御監視システム22は、ターボジェット18の逆スラスト装置20を制御するための制御ユニット26、ターボジェット18を調節するためのデバイス28を含むことができる。更に、制御監視システム22は、逆スラスト装置20の状態を検知するための複数のセンサー30を含む。システム22は、航空機に搭載の逆スラスト装置付きターボジェットの数の分だけの制御ユニット26と調節装置28を含むこととなる。
【0028】
複数のセンサー30は逆スラスト装置20のポジション検出することを可能にする。すなわち、より一般的には、逆スラスト装置20の状態を検知することを可能にする。各逆スラスト装置20は、関係する逆スラスト装置20の状態検知するための複数のセンサー30を備える。複数のセンサー30は近接センサーまたはポジションセンサーでもよい。複数のセンサー30からの情報は逆スラスト装置の展開された状態または収納された状態に関する情報とすることができる。複数のセンサーからの情報は、進行中の状態の変化に関するとすることもできる。複数のセンサーからの情報は制御監視演算手段24によって処理される。他の複数のセンサー31は制御ユニット26に情報を供給し、それを随時演算手段24に伝送することができる。これらは例えば、ロック手段上の複数のセンサーであってもよい。
【0029】
1個の制御監視演算手段24はエンジン1個につきを備えることができる。制御監視演算手段24は航空機の全てのターボジェットを制御するようにすることもできる。このように、全てのターボジェット18を制御するために1個の演算手段24が航空機に備えられる。制御監視演算手段24は、航空機のコクピット内におくことができ、全てのターボジェット18を集中的に制御する。航空機システムのレベルで演算手段を備える意義は、出された全ての指令、航空機のフライト状態や逆スラスト装置の状態に関する情報が、パイロットからの指令に関わらず異なる性格の情報毎に集積されることである。演算手段24は、演算手段24のさまざまな機能を実行する複数のユニットを含むことができる。あるユニット44は、逆スラスト装置の状態の変化を制御する機能を実行することができる。別のユニット46は、逆スラスト装置への電源供給を制御する機能を実行することができる。更に別のユニット47は、ターボジェットの調節を制御する機能を実行することができる。複数のユニットを備える意義は、安全目標を満たし、逆スラスト装置が動作範囲を越えて展開しないように確実にすることである。
【0030】
制御ユニット26は、逆スラスト装置20を制御することを可能にする。具体的には、制御ユニット26は、逆スラスト装置20のポジションの変化を制御することを可能にする。制御ユニット26は、逆スラスト装置20の状態の変化、すなわち、非使用の収納された状態から展開された使用状態への変化を制御し、その逆も制御する。1個の制御ユニット26が各逆スラスト装置20に関連づけられ、制御ユニット26は航空機の翼に、関係する逆スラスト装置に近接して置かれることが好ましい。制御ユニット26は、複数のセンサー30からの逆スラスト装置20の情報を受け取る。この情報は、逆スラスト装置20の状態に関し、逆スラスト装置20の展開または収納された状態であると同時に逆スラスト装置20が変更状態の過程にある事実のみに関する情報である。図2において、矢印32は複数のセンサーから制御ユニット26への情報30の流れを示す。複数のセンサーからの情報30は制御ユニット26に集中される。この情報は次に、制御ユニット26によって制御監視演算手段24に中継される。図2において、制御ユニット26から制御監視演算手段24への情報の伝送は矢印36で示される。このように、複数のセンサーからの情報は、制御ユニット26によって制御監視演算手段24によって直接伝送される。このことは、複数のセンサー30によって供給される情報が、制御監視演算手段24に即座により速く伝送されるという利点を提供する。制御ユニット26から制御監視演算手段24まで複数のセンサーからの情報が調節装置28を介さずに直接供給されるという事実は、調節装置28の簡素化が可能であることを意味する。事実、調節装置28はもはや制御ユニット26と制御監視演算手段24間の情報伝達の機能を果たさないので、調節装置28に現れるアルゴリズムの数を減らすことが可能である。アルゴリズムのための入力データは航空機/セルレベルにあって制御監視演算手段24によって直接処理される。またこの事は、データ伝送のための配線接続の簡素化と制御・監視アーキテクチャの簡素化に役立つ。
【0031】
制御ユニット26は制御監視演算手段24により制御される。制御監視演算手段24は制御ユニット26に指令を送り、制御ユニット26が逆スラスト装置20の動作を制御する。具体的には、制御監視演算手段24は、逆スラスト装置20の状態の変更を開始しようとするパイロットの意図を検出する。すると制御監視演算手段24は制御ユニット26を介して逆スラスト装置20の状態の変更を開始する。図2の矢印34は、制御監視演算手段24によって制御ユニット26に送られた指令を示す。演算手段24は、制御ユニット26に送る指令を定式化するために、パイロットのがわの動作を複数のセンサー30から発せられる情報と結合する。このことは、演算手段24から送られる指令によって航空機の操縦安全に役立つ逆スラスト装置のポジションに関わる知見が作り上げられることを意味する。制御ユニット26に送られる指令は、主として逆スラスト装置20の展開または収納を開始する。指令を受け取ると、制御ユニット26は、指令を制御シーケンスに変換する。この制御シーケンスは、逆スラスト装置の動作メンバー及びロックによってデコードされる一連の信号である。例えば、制御ユニット26は、逆スラスト装置のドアリニアアクチュエータを動かす電動モータに、速度制御情報を送る。
【0032】
演算手段24から受け取った指令が、複数のセンサー30から受け取った情報に従って有効であるか、制御ユニット26にチェックさせることも可能である。これは補助的な安全手段を提供する。
【0033】
このようなアーキテクチャにおいては、制御ユニット26は制御・監視コンピュータ24と直接インターフェースで接続する。すなわち、制御ユニット26は制御監視演算手段24とフルにコミュニケーションを保っている。もはや、調節装置28は制御ユニット26と制御・監視コンピュータ24との間には介在せず、制御ユニット26に権限を有するのは演算手段24である。調節装置28が制御ユニット26に物理的に近接している観点からターボジェット調節装置28を介して演算手段24から出る指令を受け取るという当然の流れを反映した欧州特許(A)0843089号とはことなり、本願アーキテクチャは、これら2個の装置の統合と互換性に縛られることはない。このことは特にこれらの装置を互いに別々に考慮可能であるから、制御ユニット26と調節装置28の製作とメンテナンスを簡素化できる。
【0034】
更なる利点としては、制御ユニット26に決定的に適用することを減らすことができることである。すなわち、制御ユニット26は、何ら中間の媒介なく制御監視演算手段24に従属し、制御ユニット26は今や演算手段24の直接制御下に存在する。演算手段24による制御ユニット26の動作の制御及び監視がより厳しくなり、制御ユニット26の自律性要件を削減に寄与する。その結果、制御ユニット26は、性能レベルの削減により、より安価な構成部品となりうる。
【0035】
また、制御ユニット26と制御監視演算手段24間の媒介としての調節装置28の存在に拘束されない結果、システムの低下をより速く検出することができる。事実、制御ユニット26、逆スラスト装置または動作メンバー低下状態を演算手段24により速く検出できる。システム低下を検出する負担はもはや調節装置28によるスポートを要せず、このことで、前記のようにその製造及びメンテナンスを容易に行うことができる。
【0036】
ターボジェットの調節は調節装置28によって行われる。すなわち、調節装置28がターボジェットに働きかけその出力を調節する。調節装置28は全自動デジタルエンジンコントロール(FADEC)を可能とする。それぞれのターボジェットに1個の調節装置28が関係することが望ましい。調節装置28からの出力信号はターボジェットの出力の制御に適している。
【0037】
調節装置28は、複数のセンサーからの情報30と演算手段24からの情報を考慮し、ターボジェットの出力を調節する。制御監視演算手段24は、調節装置28がターボジェットの出力調節するための指令を送る。制御監視演算手段24は、調節装置28を介してターボジェットの出力の調節を開始する。図2の矢印38は、制御監視演算手段24によって調節装置28に送られる指令を示す。より正確には、演算手段24は、制御ユニット26によって演算手段24に供給された複数のセンサーからの情報を考慮しながら、調節装置を制御する。演算手段24は、調節装置28の送る指令に定式化するために、パイロットの側の挙動と複数のセンサー30から出される情報を処理する。このことは、逆スラスト装置20のポジションの関数としてターボジェットの出力を調節することが可能とする。事実、例えば、逆スラスト装置20がポジションを変更する過程にある場合、調節装置28がターボジェットに最大出力を強制する可能があってはならない。これは、逆スラスト装置20にダメージを与える危険性がある。逆スラスト装置20の遷移中は、ターボジェットは反対に、低出力にセットされる。このように、演算手段24による制御は、逆スラスト装置20のポジションに関わる知見として得られ、航空機の操縦上の安全として役立つ。
【0038】
このようなアーキテクチャにおいては、調節装置28はターボジェットを調節するための制御監視演算手段24と直接インターフェースで接続される。制御ユニット26と調節装置28は並列に制御される。すなわち、異なるリンク上にある。調節装置28は制御ユニット26から情報を直接受け取ることはない。制御ユニット26と調節装置28は互いにフルコミュニケーションの状態にはない。調節装置28は、演算手段24と制御ユニット26間のリンクの外にある。このことは、制御ユニット26と調節装置28に同じ規格とコミュニケーションプロトコル適用する必要に拘束されることはないということを意味する。制御ユニット26と調節装置28のいずれか一方だけでも、規格またはコミュニケーションプロトコル変更または改良することができる。
【0039】
このようなアーキテクチャにおいては、調節装置28に臨界負荷をかけることを減らすことができる。すなわち、調節装置28は制御ユニット26を制御しないので、制御ユニット26の制御の機能は演算手段24に割り当てられる。このことは、逆スラスト装置の運転に関して調節装置28に加えられる権限と自律要件を減らすことに寄与する。その結果、調節装置28は、ハードウェアの観点からは、入出力の少ない構成部品とすることができる。
【0040】
調節装置28が、複数の逆スラスト装置状態感知センサー30から情報を受け取るようにすることもできる。図2の矢印40は、これを図式的にしめす。このように、調節装置28は制御監視演算手段24から受け取った指令と逆スラスト装置の状態の間の調和をチェックすることができる。このことで更に安全手段得られる。
【0041】
調節装置28は、制御監視演算手段24にターボジェットの運転情報を送ることができる。図2の矢印42はこれを示す。調節装置28により供給される情報は、例えば、ターボジェットの運転速度ないし温度、ターボジェットの故障ないし機能不良に関する情報である。このことは演算手段24にターボジェットの運転に関するよりよい知見を提供し、これにより運転の制御に有利に働くことができる。
【0042】
システム22の様々な構成要素を例えば、AFDX(Avionics Full Duplex)ネットワークによって一緒に接続することができる。これは、航空機用の内部コミュニケーションメディアとして設計された、冗長性を有するイーサネット(登録商標)の高い信頼性を備えるネットワークである。システムネットワーク利用性に対する需要を満たすために、AFDXネットワークは物理的に冗長性を有し、システム22の各要素は2つの異なるチャンネルでメッセージを送る。これにより、伝送不良とハードウェアの故障に関わる問題を減らすことができる。
【0043】
制御監視演算手段24は逆スラスト装置の動作の同期を提供する。同期を取ることは、独自の入力を持つモータごとに同じアルゴリズムをもつ演算手段24の使用にとって望ましいものである。
【0044】
上記の一次ロックとは別に、システム22は、高度な航空機の安全手段を提供する1ないし数個の別のロック含むことができる。2次ロックの手段として、システム22は、逆スラスト装置の動作メンバーに適用されるブレーキを含むことができる。ブレーキは、例えば、逆スラスト装置のアクチュエータを駆動する電動モータないしアクチュエータそのものを適用することができる。この2次ロックは、逆スラスト装置のドアが一次ロックの不良をサポートするように設計される。2次ロックは、制御ユニット26により制御することができる。2次ロックの存在とは独立して、システム22は、別のロック不良が生じても、ドアを維持できる第3のロックを含むことができる。この第3のロックは、コクピットから直接制御される。第3のロックは、逆スラストレバーを介して直接制御が可能である。第3のロックは、演算手段24以外の演算手段によっても制御可能である。これら他の演算手段は、逆スラストレバーと航空機のフライトパラメータに従属して動作することができる。複数のセンサーは、これらのロックの状態の関する情報を供給することが可能である。
【0045】
また、システム22は、システムの様々な構成要素に電気的出力の分配をするのを制御することができる。出力供給を遮断することは、例えば特にフライト中であれば、極めて重大な結果をもたらす逆スラスト装置の予期しない展開を回避するには利点がある。出力供給を遮断することは、補助的な 安全手段である。制御監視演算手段24は、逆スラスト装置20、特に逆スラスト装置20の動作メンバー、(例えば、リニアアクチュエータを動作させる電動モータ)への電源供給を管理することができる。演算手段24は、逆スラスト装置20の動作メンバーへの電気出力を供給または遮断するポジションにある。動作メンバーへの電気出力の遮断は、制御監視演算手段24によって制御ユニット26を介して直接行うことができる。また、制御監視演算手段24は制御ユニット26への電源供給を管理することができ、特に、演算手段24は、制御ユニット26が不正常な挙動をしているときには、制御ユニット26への電源供給を遮断することができる。
【0046】
制御監視システム22を用いたターボジェットにおける制御及び監視の方法は、制御ユニット26を介して複数のセンサー30による逆スラスト装置20の状態に関する情報を演算手段24伝送することを含むことができる。この方法は、かかる情報に基づいて、演算手段24による制御ユニット26の制御と監視を行い、ついでこの情報と関わりなく演算手段24を用いて調節装置28を制御することを含むことができる。この方法においては、制御ユニット26及び調節装置28おのおのの制御は平行して行われ、演算手段24のみが、制御ユニット26及び調節装置28の一方または他方にたいして権限を有する。ここで、上記の様々な利点が適用できる。
【0047】
ここで、動作の一例を説明する。ここでは、逆スラスト装置の展開に関して説明するが、逆スラスト装置の収納も同様の方法で動作できる。先ず、必要があれば、第3のロックがアンロックされる。アンロックが有効になると即座に、第3のロックに関係する複数のセンサーが、選択的に制御ユニット26を介して、演算手段24に通知する。演算手段24において、最初の一連の事象を行うことができる。演算手段24(より具体的にはそのユニット46)は、選択的に制御ユニット26を介して動作メンバー、具体的にはアクチュエータを作動するモータに出力を開始する。動作メンバーへの出力が有効になると、演算手段24(より具体的にはそのユニット44)が制御ユニット26に展開指令を送る。これに引き続き、制御ユニット26にて第2の一連の事象が開始することができる。演算手段24から指令を受け取ると、制御ユニット26は2次ロックにアンロックを命じる。2次ロックに関係する複数のセンサーが2次ロックのアンロック有効であることを検出すると即座に制御ユニット26に伝送される。この情報を受け取ると、制御ユニット26は一次ロックをアンロックする。1次ロックに関係する複数のセンサーが1次ロックのアンロック有効であることを検出すると即座に制御ユニット26に伝送される。この情報を受け取ると、制御ユニット26はアクチュエータ駆動モータを動作させて、逆スラスト装置のドアを開けることを命じる。逆スラスト装置の状態を検知する複数のセンサー30が、ドアが開かれたことを検出すると即座に、情報の内容が制御ユニット26に伝送される。この情報は演算手段24まで伝送される。演算手段24は電気出力を遮断する。電気出力の遮断によって、逆スラスト装置のドアと逆ジェットがロックされる。演算手段24は、調節装置28にターボジェットの出力を調節するように指令を出す。調節装置28は、航空機の制動を強めるためにターボジェットのアクセルを始動する。逆スラスト装置のドアの開放に関する情報を演算手段24から受け取った指令と係る情報を比較できるポジションにある調節装置28に直接伝送することも可能である。
【0048】
上記において、複数のセンサーは、諸事象の最終状態に関する情報を発するポジションばかりでなく、これらの事象の進行状態に関する情報を発するポジションにおくこともできる。逆スラスト装置のドアの展開の制御に更に役立つ。また、複数のセンサーからの情報の全てまたはその一部のみを演算手段に伝送することもできる。特に、一次ロックの状態が制御ユニットレベルある場合は、第2及び第3のロックの状態に関する情報を演算手段に伝送することもできる。入出力に関するハードウェアのオーバーヘッドを少なくすることができる。
【産業上の利用可能性】
【0049】
この発明は、ターボジェットを搭載した輸送機器に適用することができる。
【符号の説明】
【0050】
10 航空機
18 ターボジェット
20 逆スラスト装置
22 制御監視システム
24 制御監視演算手段
26 制御ユニット
28 ターボジェット調節装置
30 センサー
【特許請求の範囲】
【請求項1】
ターボジェット逆スラスト装置の状態を検出するための複数のセンサー(30)と、
制御監視演算手段(24)と、
制御ユニットを介して複数のセンサーから演算手段へ供給された情報の関数として演算手段によって制御される逆スラスト装置のための制御ユニット(26)と、
制御ユニットを介して複数のセンサーから演算手段へ供給された情報の関数として演算手段によって制御されるターボジェット調節装置(28)と、からなることを特徴とする制御監視システム。
【請求項2】
制御監視演算手段(24)は逆スラスト装置への電源供給を制御するようにされた、ことを特徴とする請求項1に記載の制御監視システム。
【請求項3】
制御監視演算手段(24)は、逆スラスト装置への電源供給を制御するためのユニット(46)、逆スラスト装置の状態の変化を制御するためのユニット(44)及びターボジェットの調節を制御するためのユニット(47)からなるグループから選ばれた複数のユニットを含む、ことを特徴とする請求項1又は請求項2に記載の制御監視システム。
【請求項4】
複数の状態センサー(30)は調節装置(28)に情報を供給するようにされた、ことを特徴とする請求項1から請求項3のいずれか一項に記載の制御監視システム。
【請求項5】
調節装置(28)は、演算手段(24)にターボジェット動作情報を供給するようにされた、ことを特徴とする請求項1から請求項4のいずれか一項に記載の制御監視システム。
【請求項6】
少なくとも1個の逆スラスト装置(20)が付いたターボジェット(18)と、
請求項1から請求項5のいずれか一項に記載の制御監視システム(22)であって、ターボジェットの制御と監視を行うシステム、からなる航空機。
【請求項7】
複数の状態センサー(30)からの逆スラスト装置の状態情報を制御ユニット(26)を介して演算手段(24)に伝送する工程と、
演算手段(24)を用いて、制御ユニット(26)をこの情報の関数として制御する工程と、
演算手段(24)を用いて、調節装置(28)をこの情報の関数として制御する工程と、を含むことを特徴とする請求項1から請求項5のいずれか一項に記載の制御監視システムを用いるターボジェットにおいて制御と監視を行うための方法。
【請求項8】
演算手段(24)を用いて、逆スラスト装置の電源供給を制御する工程、をさらに含む、ことを特徴とする請求項7に記載の制御監視システムを用いるターボジェットにおいて制御と監視を行うための方法。
【請求項9】
複数の状態センサーによる逆スラスト装置の状態情報を調節装置(28)に伝送する工程と、
調節装置(28)を用いて、複数の状態センサーから受け取った情報と演算手段(24)から受け取った指令との間の一致をチェックする工程をさらに含む、ことを特徴とする請求項7又は請求項8に記載の制御監視システムを用いるターボジェットにおいて制御と監視を行うための方法。
【請求項10】
調節装置(28)を用いて、ターボジェットの動作情報を演算手段に供給する工程を更に含む、ことを特徴とする請求項7から請求項9のいずれか一項に記載の制御監視システムを用いるターボジェットにおいて制御と監視を行うための方法。
【請求項1】
ターボジェット逆スラスト装置の状態を検出するための複数のセンサー(30)と、
制御監視演算手段(24)と、
制御ユニットを介して複数のセンサーから演算手段へ供給された情報の関数として演算手段によって制御される逆スラスト装置のための制御ユニット(26)と、
制御ユニットを介して複数のセンサーから演算手段へ供給された情報の関数として演算手段によって制御されるターボジェット調節装置(28)と、からなることを特徴とする制御監視システム。
【請求項2】
制御監視演算手段(24)は逆スラスト装置への電源供給を制御するようにされた、ことを特徴とする請求項1に記載の制御監視システム。
【請求項3】
制御監視演算手段(24)は、逆スラスト装置への電源供給を制御するためのユニット(46)、逆スラスト装置の状態の変化を制御するためのユニット(44)及びターボジェットの調節を制御するためのユニット(47)からなるグループから選ばれた複数のユニットを含む、ことを特徴とする請求項1又は請求項2に記載の制御監視システム。
【請求項4】
複数の状態センサー(30)は調節装置(28)に情報を供給するようにされた、ことを特徴とする請求項1から請求項3のいずれか一項に記載の制御監視システム。
【請求項5】
調節装置(28)は、演算手段(24)にターボジェット動作情報を供給するようにされた、ことを特徴とする請求項1から請求項4のいずれか一項に記載の制御監視システム。
【請求項6】
少なくとも1個の逆スラスト装置(20)が付いたターボジェット(18)と、
請求項1から請求項5のいずれか一項に記載の制御監視システム(22)であって、ターボジェットの制御と監視を行うシステム、からなる航空機。
【請求項7】
複数の状態センサー(30)からの逆スラスト装置の状態情報を制御ユニット(26)を介して演算手段(24)に伝送する工程と、
演算手段(24)を用いて、制御ユニット(26)をこの情報の関数として制御する工程と、
演算手段(24)を用いて、調節装置(28)をこの情報の関数として制御する工程と、を含むことを特徴とする請求項1から請求項5のいずれか一項に記載の制御監視システムを用いるターボジェットにおいて制御と監視を行うための方法。
【請求項8】
演算手段(24)を用いて、逆スラスト装置の電源供給を制御する工程、をさらに含む、ことを特徴とする請求項7に記載の制御監視システムを用いるターボジェットにおいて制御と監視を行うための方法。
【請求項9】
複数の状態センサーによる逆スラスト装置の状態情報を調節装置(28)に伝送する工程と、
調節装置(28)を用いて、複数の状態センサーから受け取った情報と演算手段(24)から受け取った指令との間の一致をチェックする工程をさらに含む、ことを特徴とする請求項7又は請求項8に記載の制御監視システムを用いるターボジェットにおいて制御と監視を行うための方法。
【請求項10】
調節装置(28)を用いて、ターボジェットの動作情報を演算手段に供給する工程を更に含む、ことを特徴とする請求項7から請求項9のいずれか一項に記載の制御監視システムを用いるターボジェットにおいて制御と監視を行うための方法。
【図1】

【図2】
【図2】
【公表番号】特表2011−504213(P2011−504213A)
【公表日】平成23年2月3日(2011.2.3)
【国際特許分類】
【出願番号】特願2010−531555(P2010−531555)
【出願日】平成20年10月24日(2008.10.24)
【国際出願番号】PCT/FR2008/001495
【国際公開番号】WO2009/092872
【国際公開日】平成21年7月30日(2009.7.30)
【出願人】(501446228)エアバス・フランス (93)
【公表日】平成23年2月3日(2011.2.3)
【国際特許分類】
【出願日】平成20年10月24日(2008.10.24)
【国際出願番号】PCT/FR2008/001495
【国際公開番号】WO2009/092872
【国際公開日】平成21年7月30日(2009.7.30)
【出願人】(501446228)エアバス・フランス (93)
[ Back to top ]